
コンバイン
【課題】コンバインの燃費改善によって低コスト農業に寄与する。
【解決手段】脱穀装置(3)の駆動状態を検出する第1センサ(28)と、穀粒排出装置(4a)の駆動状態を検出する第2センサ(29)と、走行装置(2)の駆動状態を検出する第3センサ(33,35)を設け、第1センサ(28)及び第2センサ(29)によって脱穀装置(3)及び穀粒排出装置(4a)の駆動停止状態が検出され且つ第3センサ(33,35)によって走行装置(2)の駆動停止状態が検出された状態において、駐車ブレーキ(P)が制動操作された場合に、エンジン(E)の駆動を自動的に停止させる制御装置(19)を設ける。また、エンジン(E)の駆動が自動的に停止された状態において、駐車ブレーキ(P)による制動が解除操作された場合に、エンジン(E)が自動的に始動する構成とする。
【解決手段】脱穀装置(3)の駆動状態を検出する第1センサ(28)と、穀粒排出装置(4a)の駆動状態を検出する第2センサ(29)と、走行装置(2)の駆動状態を検出する第3センサ(33,35)を設け、第1センサ(28)及び第2センサ(29)によって脱穀装置(3)及び穀粒排出装置(4a)の駆動停止状態が検出され且つ第3センサ(33,35)によって走行装置(2)の駆動停止状態が検出された状態において、駐車ブレーキ(P)が制動操作された場合に、エンジン(E)の駆動を自動的に停止させる制御装置(19)を設ける。また、エンジン(E)の駆動が自動的に停止された状態において、駐車ブレーキ(P)による制動が解除操作された場合に、エンジン(E)が自動的に始動する構成とする。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、コンバインに関するものである。
【背景技術】
【0002】
従来より、コンバインには、機体を走行させる走行装置と、この走行装置を制動する駐車ブレーキと、圃場の穀稈を刈り取る刈取装置と、刈り取った穀稈を脱穀する脱穀装置と、脱穀した穀粒を貯留する穀粒貯留装置と、この穀粒貯留装置内の穀粒を排出する穀粒排出装置と、機体各部を駆動するエンジンが備えられている。
【0003】
コンバイン作業においては、エンジンを始動し、駐車ブレーキを解除し、刈取装置と脱穀装置を駆動して前進しながら圃場の穀稈を刈り取る。そして、穀粒貯留装置が満杯になると、刈取装置および脱穀装置の駆動を停止して圃場の脇に停車した運搬車に横付けし、穀粒排出装置を駆動して穀粒を運搬車の荷台に排出する。
【0004】
このようなコンバイン作業における燃料消費量を減少させ、燃費を改善するための技術として、特許文献1に記載された技術が試みられている。
即ち、刈取装置と脱穀装置が駆動停止状態にあり、走行用の変速装置が中立状態にある場合に、アクセルレバーを減速側に自動操作して、エンジンの回転速度をアイドリング回転速度まで低下させるものである。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平6−288270号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、上記特許文献1に記載された技術では、非作業状態においてエンジン回転速度を減速できるものの、エンジン回転を自動的に停止させるには至らず、燃料を無駄に消費するゆえに、燃費改善に大きな効果が得られない。
【0007】
この発明は、設定された条件に応じてエンジンを自動的に停止させることで、燃料消費量を減少させ、コンバインの燃費を改善して低コスト農業に寄与することを目的としたものである。
【課題を解決するための手段】
【0008】
この発明は、上述の課題を解決するために、次の技術的手段を講じる。
即ち、請求項1記載の発明は、機体を走行させる走行装置(2)と、該走行装置(2)を制動する駐車ブレーキ(P)と、圃場の穀稈を刈り取る刈取装置(5)と、刈り取った穀稈を脱穀する脱穀装置(3)と、脱穀した穀粒を貯留する穀粒貯留装置(4)と、該穀粒貯留装置(4)内の穀粒を排出する穀粒排出装置(4a)と、機体各部を駆動するエンジン(E)を備えたコンバインにおいて、前記脱穀装置(3)の駆動状態を検出する第1センサ(28)と、前記穀粒排出装置(4a)の駆動状態を検出する第2センサ(29)と、前記走行装置(2)の駆動状態を検出する第3センサ(33,35)を設け、前記第1センサ(28)及び第2センサ(29)によって脱穀装置(3)及び穀粒排出装置(4a)の駆動停止状態が検出され且つ第3センサ(33,35)によって走行装置(2)の駆動停止状態が検出された状態において、前記駐車ブレーキ(P)が制動操作された場合に、エンジン(E)の駆動を自動的に停止させる制御装置(19)を設けたことを特徴とするコンバインとしたものである。
【0009】
請求項2記載の発明は、前記エンジン(E)の駆動が自動的に停止された状態において、駐車ブレーキ(P)による制動が解除操作された場合に、エンジン(E)が自動的に始動する構成とした請求項1記載のコンバインとしたものである。
【0010】
請求項3記載の発明は、前記エンジン(E)の駆動が自動的に停止された状態において、脱穀装置(3)が駆動開始操作された場合に、エンジン(E)が自動的に始動する構成とした請求項1または請求項2記載のコンバインとしたものである。
【0011】
請求項4記載の発明は、前記エンジン(E)の駆動が自動的に停止された状態において、穀粒排出装置(4a)が駆動開始操作された場合に、エンジン(E)が自動的に始動する構成とした請求項1または請求項2または請求項3記載のコンバインとしたものである。
【0012】
請求項5記載の発明は、前記エンジン(E)の駆動が自動的に停止された状態において、刈取装置(5)が上昇操作された場合に、エンジン(E)が自動的に始動する構成とした請求項1から請求項4のいずれか一項記載のコンバインとしたものである。
【0013】
請求項6記載の発明は、前記第1センサ(28)を、エンジン(E)から脱穀装置(3)への伝動経路に備えた脱穀クラッチの接続状態を検出する脱穀クラッチセンサとして備え、前記第2センサ(29)を、エンジン(E)から穀粒排出装置(4a)への伝動経路に備えた穀粒排出クラッチの接続状態を検出する穀粒排出クラッチセンサとして備え、前記第3センサ(35)を、走行装置(2)の駆動速度を検出する車速センサとして備えた請求項1から請求項5のいずれか一項記載のコンバインとしたものである。
【0014】
請求項7記載の発明は、前記第1センサ(28)を、エンジン(E)から脱穀装置(3)への伝動経路に備えた脱穀クラッチの接続状態を検出する脱穀クラッチセンサとして備え、前記第2センサ(29)を、エンジン(E)から穀粒排出装置(4a)への伝動経路に備えた穀粒排出クラッチの接続状態を検出する穀粒排出クラッチセンサとして備え、前記第3センサ(33)を、走行装置(2)の駆動速度を変速操作する変速レバー(T)の操作位置を検出する変速操作位置センサとして備えた請求項1から請求項5のいずれか一項記載のコンバインとしたものである。
【発明の効果】
【0015】
請求項1記載の発明によると、作業を終了ないし中断し、脱穀装置(3)及び穀粒排出装置(4a)の駆動が停止している状態で、駐車ブレーキ(P)が制動操作された場合に、エンジン(E)の駆動を自動的に停止させることで、上述の従来技術に比較して燃料消費量を低減でき、コンバインの燃費改善によって低コスト農業に寄与することができる。
【0016】
請求項2記載の発明によると、上記請求項1記載の発明の効果に加え、駐車ブレーキ(P)による制動が解除操作された場合に、停止していたエンジン(E)が自動的に始動するので、走行開始のためのエンジン始動操作を省略でき、機動性を高めることができる。
【0017】
請求項3記載の発明によると、上記請求項1または請求項2記載の発明の効果に加え、脱穀装置(3)が駆動開始操作された場合に、停止していたエンジン(E)が自動的に始動するので、脱穀作業開始のためのエンジン始動操作を省略でき、脱穀作業の能率を向上させることができる。
【0018】
請求項4記載の発明によると、上記請求項1または請求項2または請求項3記載の発明の効果に加え、穀粒排出装置(4a)が駆動開始操作された場合に、停止していたエンジン(E)が自動的に始動するので、穀粒排出作業開始のためのエンジン始動操作を省略でき、穀粒排出作業の能率を向上させることができる。
【0019】
請求項5記載の発明によると、上記請求項1から請求項4のいずれか一項記載の発明の効果に加え、刈取装置(5)が上昇操作された場合に、停止していたエンジン(E)が自動的に始動するので、刈取作業開始のためのエンジン始動操作を省略でき、刈取作業の能率を向上させることができる。
【0020】
請求項6記載の発明によると、上記請求項1から請求項5のいずれか一項記載の発明の効果を奏するうえで、脱穀装置(3)と穀粒排出装置(4a)と走行装置(2)の各駆動状態を精度よく検出することができ、エンジン停止制御の精度が高まる。
【0021】
請求項7記載の発明によると、上記請求項1から請求項5のいずれか一項記載の発明の効果を奏するうえで、脱穀装置(3)と穀粒貯留装置(4)の各駆動状態を精度よく検出でき、走行装置(2)の駆動状態を変速レバー(T)の操作位置から迅速に検出できるため、エンジン停止制御の応答性が高まる。
【図面の簡単な説明】
【0022】
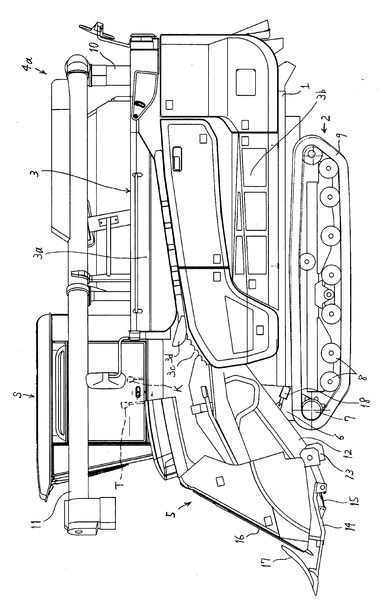
【図1】コンバインの側面図である。
【図2】コンバインの側面図である。
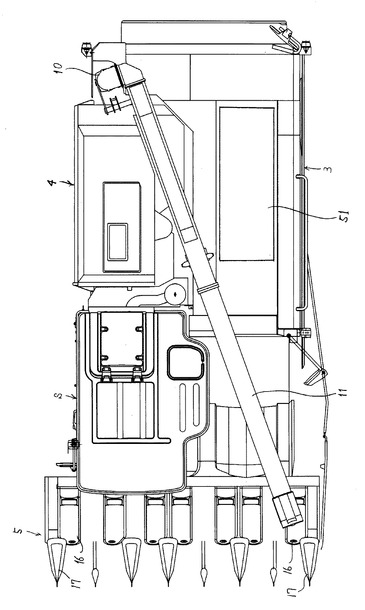
【図3】コンバインの平面図である。
【図4】制御装置のブロック図である。
【図5】エンジン自動停止・始動制御のフローチャートである。
【図6】盗難防止制御装置の概念を示すブロック図である。
【図7】燃料残量表示装置の説明図である。
【図8】図7のパネルの拡大図である。
【発明を実施するための形態】
【0023】
この発明の実施の形態を、自脱型のコンバインを例示して説明する。
(機体構成)
図1、図2、図3に示すように、コンバインは、機体フレーム1の下方に走行装置2を設け、機体フレーム1の上部左側には脱穀装置3を搭載し、機体フレーム1の上部右側には穀粒貯留装置4を搭載し、機体フレーム1上における穀粒貯留装置4の前側には電子ガバナ式或いはコモンレール燃料噴射式のエンジンEを搭載し、走行装置2の前方位置には刈取装置5を設けて構成する。
(走行装置の構成)
前記走行装置2は、機体フレーム1の前部に、エンジンEから静油圧式無段変速装置(図示省略)を介して駆動されるミッションケース6を取り付け、このミッションケース6から駆動される左右の駆動輪7と多数の転輪8にわたって、クローラ9を巻きかけて構成する。前記静油圧式無段変速装置は、キャビンによって覆われた操縦部Sの一側に備えた変速レバーTの前後傾動操作によって変速されるように、この静油圧式無段変速装置のトラニオン軸と変速レバーTとを機械的あるいは電気的に連繋している。尚、前記静油圧式無段変速装置には、油圧モータ側の斜板角度を2位置に切り換えて出力を2段階に変速する機構を備える。また、前記ミッションケース6には、このミッションケース6内の伝動軸を制動する駐車ブレーキPを備え、操縦部Sのステップ上に配置した駐車ブレーキペダルQの踏み込み操作によってこの駐車ブレーキPが制動作動するよう連繋している。
(脱穀装置の構成)
前記脱穀装置3は、扱胴、ニ番処理胴、排塵処理胴、排塵ファンを内装する上部の扱室3aと、揺動選別棚、唐箕、一番移送螺旋、ニ番移送螺旋を内装する下部の選別室3bから構成し、扱室3aの外側部には、フィードチェン3cの上側に対向する挟扼杆3dを設ける。エンジンEの出力軸に備えた出力プーリと、脱穀装置3の入力軸に備えた入力プーリとに伝動ベルトを巻き掛け、この伝動ベルトを緊張および弛緩させるテンションプーリをテンションアームに支持して備えて脱穀クラッチを構成し、この入力軸から、前記扱胴、二番処理胴、排塵処理胴、排塵ファン、揺動選別棚、唐箕、一番移送螺旋、二番移送螺旋、フィードチェン3cが連動して駆動される構成としている。尚、上記テンションアームを回動させて脱穀クラッチを接続および遮断操作する電動モータを備えている。
(穀粒排出装置の構成)
前記穀粒貯留装置4は、箱型の容器に形成し、該穀粒貯留装置4には、内部に貯留した穀粒を外部へ排出する穀粒排出装置4aを備える。即ち、穀粒貯留装置4の後側に立設した旋回自在の揚穀筒10の上端部に、排出筒11の基部を昇降回動自在に接続する。そして、穀粒貯留装置4の底部に前後方向に配置した底部移送螺旋と、揚穀筒10に内装した揚穀螺旋と、排出筒11に内装した排出螺旋とを連動して穀粒排出装置4aを構成し、前記底部移送螺旋の前端部に備えた入力プーリとエンジンEによって駆動される出力プーリとの間に伝動ベルトを巻き掛け、この伝動ベルトを緊張および弛緩させるテンションプーリをテンションアームに支持して備えて穀粒排出クラッチを構成している。尚、上記テンションアームを回動させて穀粒排出クラッチを接続および遮断操作する電動モータを備えている。
(刈取装置の構成)
前記刈取装置5は、機体フレーム1の前部に縦支持フレーム12の後端部を上下回動自在に支持し、この縦支持フレーム12の前端部に左右方向の下部ギヤケース13の左右中間部を連結し、この下部ギヤケース13の前側に固定した分草フレーム14の中間部に左右方向のバリカン式の刈刃15を取り付け、分草フレーム14の前部に引起装置16の下部を取り付け、分草フレーム14の前端部に分草体17を取り付けて構成する。該刈取装置5は、前記ミッションケース6の中間出力軸からテンションクラッチ式の刈取クラッチを介して駆動される構成とする。この刈取クラッチは、上述の脱穀クラッチ操作用の電動モータで作動する。尚、刈取装置5を、エンジンEによって駆動される刈取装置駆動用の静油圧式無段変速装置を介して変速駆動する構成としてもよい。また、この刈取装置5と機体フレーム1側との間に、刈取装置5を昇降させる刈取昇降シリンダ18を設け、操縦部Sの前部に設けた操向レバーUの前後傾動操作によってこの刈取昇降シリンダ18が伸縮作動するよう連繋している。この操向レバーUを左右傾動操作することで、左右の駆動輪7,7の駆動速度が異なる速度となって機体が旋回する。
(制御装置の構成)
図4に示すように、制御装置19は、エンジン停止/始動制御用の中央演算処理ユニット20に対して、デジタル信号入力処理回路21とアナログ信号入力処理回路22と回転信号入力処理回路23を入力接続し、タイマーカウント回路24を入出力可能に接続し、エンジン停止出力処理回路25とエンジン始動出力処理回路26を出力接続して構成する。
【0024】
前記デジタル信号入力処理回路21の入力ポートには、エンジン自動停止制御を有効/無効に切り換えるエンジン自動停止選択スイッチ27と、上述の脱穀クラッチのテンションアームの回動位置から、この脱穀クラッチの接続/遮断状態を検出する第1センサ28と、上述の穀粒排出クラッチのテンションアームの回動位置から、この穀粒排出クラッチの接続/遮断状態を検出する第2センサ29と、穀粒排出クラッチのテンションアームを回動させる電動モータを起動および停止操作する排出開始/停止操作スイッチ30と、駐車ブレーキペダルQの踏み込み位置を検出する駐車ブレーキスイッチ31を接続する。
【0025】
前記アナログ信号入力処理回路22の入力ポートには、操縦部Sの側部に備えた刈取・脱穀操作レバーKの操作位置を検出する刈取・脱穀ポジションセンサ32と、前記変速レバーTの前後傾動操作位置を検出する変速ポジションセンサ(第3センサ)33と、前記操向レバーUの前後傾動操作位置を検出する刈取昇降ポジションセンサ34を接続する。尚、刈取・脱穀操作レバーKが脱穀クラッチ接続位置へ操作されると、前記電動モータが所定量作動して脱穀クラッチのテンションアームが緊張側へ作動し、脱穀クラッチが接続される。刈取・脱穀操作レバーKが脱穀クラッチ接続位置を越えて刈取クラッチ接続位置まで操作されると、前記電動モータが更に所定量作動して刈取クラッチのテンションアームも緊張側へ作動し、刈取クラッチが接続され、脱穀クラッチと刈取クラッチの両方が接続された状態となる。
【0026】
前記回転信号入力処理回路23の入力ポートには、前記ミッションケース6内の伝動軸の回転速度から車速を検出する車速センサ(第3センサ)35と、前記エンジンEの出力軸の回転速度を検出するエンジン回転速度センサ36を接続する。
【0027】
前記エンジン停止出力処理回路25の出力ポートには、エンジンEへの燃料供給経路を遮断してエンジンEを停止させるエンジン停止リレー37を接続する。
前記エンジン始動出力処理回路26の出力ポートには、エンジンEへの燃料供給経路を接続すると共に、エンジン始動用のセルモータを起動するエンジン始動リレー38を接続する。
(制御フロー)
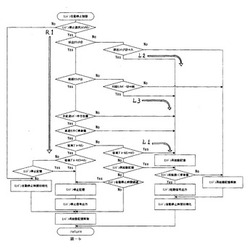
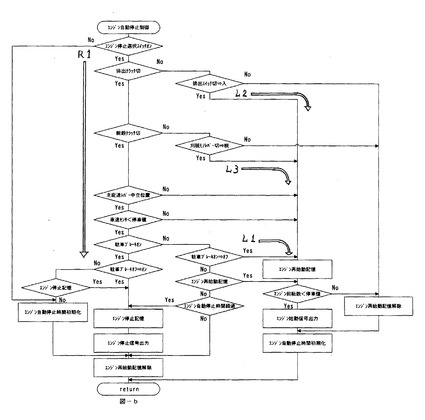
図5に示すフローチャートに基づいて、エンジン自動停止・始動制御の流れを説明する。
【0028】
前記エンジン自動停止選択スイッチ27がON操作されると、エンジン自動停止・始動制御が有効となる。
そして、第2センサ29によって穀粒排出クラッチが遮断状態にあることが検出され、第1センサ28によって脱穀クラッチが遮断状態にあることが検出され、変速ポジションセンサ33によって変速レバーTが中立位置に操作されていることが検出され、車速センサ35によって停車状態あるいは停車状態に近似した車速が検出され、駐車ブレーキスイッチ31によって駐車ブレーキペダルQの踏み込みが検出された場合に、エンジン停止リレー37へ出力がなされ、エンジンEへの燃料供給経路が遮断されてエンジンEが停止する。このルートR1がエンジン自動停止制御のメインフローである。上記駐車ブレーキスイッチ31による駐車ブレーキペダルQの踏み込み位置の検出において、駐車ブレーキペダルQの踏み込みが検出されない場合には、エンジン停止リレー37への出力はなされない。
【0029】
このようにしてエンジンEが自動停止した状態において、上記駐車ブレーキスイッチ31によって駐車ブレーキペダルQの踏み込みが解除されたことが検出された場合には、エンジン始動リレー38へ出力がなされ、燃料供給の開始と共にセルモータが起動し、エンジンEが始動される。このルートL1がエンジン自動始動制御の第1フローである。
【0030】
また、上述のようにしてエンジンEが自動停止した状態で、上記第2センサ29による穀粒排出クラッチの接続/遮断状態の検出において、穀粒排出クラッチが接続状態に切り換わったことが検出され、エンジン回転速度センサ36で検出されるエンジンEの出力軸の回転速度が停止速度(0rpm)あるいは停止速度に近似した速度であった場合には、エンジン始動リレー38へ出力がなされ、燃料供給の開始と共にセルモータが起動し、エンジンEが始動される。このルートL2がエンジン自動始動制御の第2フローである。
【0031】
また、上述のようにしてエンジンEが自動停止した状態において、第1センサ28によって脱穀クラッチが接続状態に切り換わったことが検出された場合には、エンジン始動リレー38へ出力がなされ、燃料供給の開始と共にセルモータが起動し、エンジンEが始動される。このルートL3がエンジン自動始動制御の第3フローである。
【0032】
尚、このフローチャートには含まれていないが、上述のようにしてエンジンEが自動停止した状態で、刈取昇降ポジションセンサ34によって刈取装置5の上昇操作が検出された場合には、エンジン始動リレー38へ出力がなされ、燃料供給の開始と共にセルモータが起動し、エンジンEが始動される。このルートL4がエンジン自動始動制御の第4フローである。
(エンジン自動停止制御、エンジン自動始動制御の効果)
ルートR1のフローに従い、作業を終了ないし中断し、脱穀装置3及び穀粒排出装置4aの駆動が停止している状態で、駐車ブレーキPが制動操作された場合に、エンジンEの駆動を自動的に停止させることで、従来技術に比較して燃料消費量を低減でき、コンバインの燃費改善によって低コスト農業に寄与することができる。
【0033】
また、ルートL1のフローに従い、駐車ブレーキPによる制動が解除操作された場合に、停止していたエンジンEが自動的に始動するので、走行開始のためのエンジン始動操作を省略でき、機動性を高めることができる。
【0034】
また、ルートL2のフローに従い、穀粒排出装置4aが駆動開始操作された場合に、停止していたエンジンEが自動的に始動するので、穀粒排出作業開始のためのエンジン始動操作を省略でき、穀粒排出作業の能率を向上させることができる。
【0035】
また、ルートL3のフローに従い、脱穀装置3が駆動開始操作された場合に、停止していたエンジンEが自動的に始動するので、脱穀作業開始のためのエンジン始動操作を省略でき、脱穀作業の能率を向上させることができる。
【0036】
また、ルートL4に従い、刈取装置5が上昇操作された場合に、停止していたエンジンEが自動的に始動するので、刈取作業開始のためのエンジン始動操作を省略でき、刈取作業の能率を向上させることができる。
(盗難防止制御)
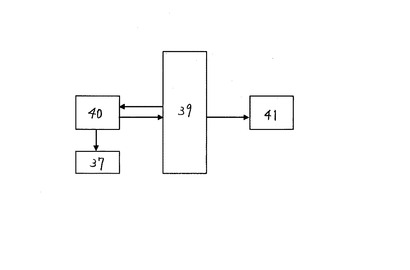
図6に示すように、モニタ制御部39に対して、エンジンE側に備えたECU40をCAN通信ラインによって相互通信可能に接続し、このECU40の出力側にエンジン停止リレー37を接続する。また、モニタ制御部39の出力側に、操縦部Sに備えたモニター41を同期通信ラインによって接続する。
【0037】
該モニター41の周囲には、複数の操作スイッチが備えられており、オペレータがこれらの操作スイッチによって4桁の暗証コードを設定し、次回のエンジン始動操作時に、この4桁の暗証コードが入力されない場合には、エンジン停止リレー37へ出力がなされ、エンジンEを始動できないように牽制する盗難防止システムを構成している。
【0038】
そして、暗証コードの設定後、最初(1回目)に入力した4桁のコードが設定された暗証コードと一致しない場合には、ブザーを断続的に出力すると共に、モニター41に「設定キーが違います」と表示する。このブザーの断続出力は設定時間で停止する。2回目に入力した4桁のコードが設定された暗証コードと一致しない場合も同様の出力がなされる。
【0039】
そして、入力したコードが設定された暗証コードと一致しない状態が3回連続した場合には、警笛とブザーを連続出力すると共に、モニター41に「設定キーが違います」と表示する。この警笛の出力は、メインキーをOFFするまで継続される。
(燃料残量表示)
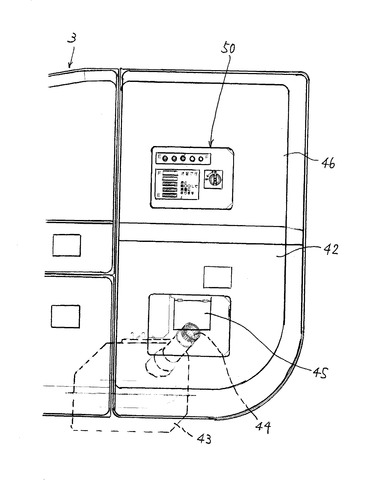
図7に示すように、脱穀装置3の後部に装着される排藁カッターの外側を覆う下側のカバー42に、燃料タンク43の給油口44が臨む開口部を形成し、この開口部を開閉自在に覆う蓋板45を設けている。
【0040】
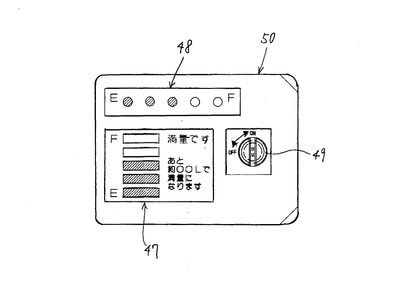
図7、図8に示すように、このカバー42の上側に設けたカバー46には、燃料タンク43内のフロート式のセンサーによって検出される燃料残量を文字表示すると共に段階的にグラフィック表示する燃料残量モニター47と、燃料残量をLEDで段階的に点灯表示する燃料残量表示ランプ48と、エンジンEを始動/停止操作可能なキースイッチ49を備えたパネル50を設ける。このパネル50には、各表示機能を司るコントローラを、本機側コントローラ、中央演算処理ユニット20、ECU40等とは独立して備え、このコントローラに必要な電力、および燃料残量モニター47、燃料残量表示ランプ48の表示に必要な電力を、コンバインの機体上(脱穀装置3の上面など)に備えた太陽光発電パネル51によって発電された電力でまかなう構成としている。
【0041】
このように、燃料タンク43の給油口44の近傍にキースイッチ49を配置することで、燃料補給の際にエンジンEを停止させるためにわざわざ操縦部Sにまわってメインキーを操作する必要がなく、作業能率が向上する。
(ナビゲーションシステム)
コンバインの機体にGPS用のレシーバと高度計(気圧計)を搭載し、機体の2次元位置と高度からマップ上での機体の位置検出精度を向上させ、この位置検出情報と機体に搭載した各種センサ(穀粒貯留装置4内の貯留穀粒量を検出するセンサ、機体フレーム1の左右傾斜角度を検出する傾斜センサ等)からの検出情報を基に、機体の走行安全性を判定して報知する構成としてもよい。
【0042】
これにより、機体の高度情報から機体が法面を移動しているか否かを判定し、更に、機体に搭載したセンサで検出される機体の傾斜や貯留穀粒量に基づいて、安全性を総合的に判定して報知することができ、安全性が向上する。
【符号の説明】
【0043】
2 走行装置
3 脱穀装置
4 穀粒貯留装置
4a 穀粒排出装置
5 刈取装置
19 制御装置
28 第1センサ
29 第2センサ
33 変速ポジションセンサ(第3センサ)
35 車速センサ(第3センサ)
E エンジン
P 駐車ブレーキ
T 変速レバー
【技術分野】
【0001】
この発明は、コンバインに関するものである。
【背景技術】
【0002】
従来より、コンバインには、機体を走行させる走行装置と、この走行装置を制動する駐車ブレーキと、圃場の穀稈を刈り取る刈取装置と、刈り取った穀稈を脱穀する脱穀装置と、脱穀した穀粒を貯留する穀粒貯留装置と、この穀粒貯留装置内の穀粒を排出する穀粒排出装置と、機体各部を駆動するエンジンが備えられている。
【0003】
コンバイン作業においては、エンジンを始動し、駐車ブレーキを解除し、刈取装置と脱穀装置を駆動して前進しながら圃場の穀稈を刈り取る。そして、穀粒貯留装置が満杯になると、刈取装置および脱穀装置の駆動を停止して圃場の脇に停車した運搬車に横付けし、穀粒排出装置を駆動して穀粒を運搬車の荷台に排出する。
【0004】
このようなコンバイン作業における燃料消費量を減少させ、燃費を改善するための技術として、特許文献1に記載された技術が試みられている。
即ち、刈取装置と脱穀装置が駆動停止状態にあり、走行用の変速装置が中立状態にある場合に、アクセルレバーを減速側に自動操作して、エンジンの回転速度をアイドリング回転速度まで低下させるものである。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平6−288270号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、上記特許文献1に記載された技術では、非作業状態においてエンジン回転速度を減速できるものの、エンジン回転を自動的に停止させるには至らず、燃料を無駄に消費するゆえに、燃費改善に大きな効果が得られない。
【0007】
この発明は、設定された条件に応じてエンジンを自動的に停止させることで、燃料消費量を減少させ、コンバインの燃費を改善して低コスト農業に寄与することを目的としたものである。
【課題を解決するための手段】
【0008】
この発明は、上述の課題を解決するために、次の技術的手段を講じる。
即ち、請求項1記載の発明は、機体を走行させる走行装置(2)と、該走行装置(2)を制動する駐車ブレーキ(P)と、圃場の穀稈を刈り取る刈取装置(5)と、刈り取った穀稈を脱穀する脱穀装置(3)と、脱穀した穀粒を貯留する穀粒貯留装置(4)と、該穀粒貯留装置(4)内の穀粒を排出する穀粒排出装置(4a)と、機体各部を駆動するエンジン(E)を備えたコンバインにおいて、前記脱穀装置(3)の駆動状態を検出する第1センサ(28)と、前記穀粒排出装置(4a)の駆動状態を検出する第2センサ(29)と、前記走行装置(2)の駆動状態を検出する第3センサ(33,35)を設け、前記第1センサ(28)及び第2センサ(29)によって脱穀装置(3)及び穀粒排出装置(4a)の駆動停止状態が検出され且つ第3センサ(33,35)によって走行装置(2)の駆動停止状態が検出された状態において、前記駐車ブレーキ(P)が制動操作された場合に、エンジン(E)の駆動を自動的に停止させる制御装置(19)を設けたことを特徴とするコンバインとしたものである。
【0009】
請求項2記載の発明は、前記エンジン(E)の駆動が自動的に停止された状態において、駐車ブレーキ(P)による制動が解除操作された場合に、エンジン(E)が自動的に始動する構成とした請求項1記載のコンバインとしたものである。
【0010】
請求項3記載の発明は、前記エンジン(E)の駆動が自動的に停止された状態において、脱穀装置(3)が駆動開始操作された場合に、エンジン(E)が自動的に始動する構成とした請求項1または請求項2記載のコンバインとしたものである。
【0011】
請求項4記載の発明は、前記エンジン(E)の駆動が自動的に停止された状態において、穀粒排出装置(4a)が駆動開始操作された場合に、エンジン(E)が自動的に始動する構成とした請求項1または請求項2または請求項3記載のコンバインとしたものである。
【0012】
請求項5記載の発明は、前記エンジン(E)の駆動が自動的に停止された状態において、刈取装置(5)が上昇操作された場合に、エンジン(E)が自動的に始動する構成とした請求項1から請求項4のいずれか一項記載のコンバインとしたものである。
【0013】
請求項6記載の発明は、前記第1センサ(28)を、エンジン(E)から脱穀装置(3)への伝動経路に備えた脱穀クラッチの接続状態を検出する脱穀クラッチセンサとして備え、前記第2センサ(29)を、エンジン(E)から穀粒排出装置(4a)への伝動経路に備えた穀粒排出クラッチの接続状態を検出する穀粒排出クラッチセンサとして備え、前記第3センサ(35)を、走行装置(2)の駆動速度を検出する車速センサとして備えた請求項1から請求項5のいずれか一項記載のコンバインとしたものである。
【0014】
請求項7記載の発明は、前記第1センサ(28)を、エンジン(E)から脱穀装置(3)への伝動経路に備えた脱穀クラッチの接続状態を検出する脱穀クラッチセンサとして備え、前記第2センサ(29)を、エンジン(E)から穀粒排出装置(4a)への伝動経路に備えた穀粒排出クラッチの接続状態を検出する穀粒排出クラッチセンサとして備え、前記第3センサ(33)を、走行装置(2)の駆動速度を変速操作する変速レバー(T)の操作位置を検出する変速操作位置センサとして備えた請求項1から請求項5のいずれか一項記載のコンバインとしたものである。
【発明の効果】
【0015】
請求項1記載の発明によると、作業を終了ないし中断し、脱穀装置(3)及び穀粒排出装置(4a)の駆動が停止している状態で、駐車ブレーキ(P)が制動操作された場合に、エンジン(E)の駆動を自動的に停止させることで、上述の従来技術に比較して燃料消費量を低減でき、コンバインの燃費改善によって低コスト農業に寄与することができる。
【0016】
請求項2記載の発明によると、上記請求項1記載の発明の効果に加え、駐車ブレーキ(P)による制動が解除操作された場合に、停止していたエンジン(E)が自動的に始動するので、走行開始のためのエンジン始動操作を省略でき、機動性を高めることができる。
【0017】
請求項3記載の発明によると、上記請求項1または請求項2記載の発明の効果に加え、脱穀装置(3)が駆動開始操作された場合に、停止していたエンジン(E)が自動的に始動するので、脱穀作業開始のためのエンジン始動操作を省略でき、脱穀作業の能率を向上させることができる。
【0018】
請求項4記載の発明によると、上記請求項1または請求項2または請求項3記載の発明の効果に加え、穀粒排出装置(4a)が駆動開始操作された場合に、停止していたエンジン(E)が自動的に始動するので、穀粒排出作業開始のためのエンジン始動操作を省略でき、穀粒排出作業の能率を向上させることができる。
【0019】
請求項5記載の発明によると、上記請求項1から請求項4のいずれか一項記載の発明の効果に加え、刈取装置(5)が上昇操作された場合に、停止していたエンジン(E)が自動的に始動するので、刈取作業開始のためのエンジン始動操作を省略でき、刈取作業の能率を向上させることができる。
【0020】
請求項6記載の発明によると、上記請求項1から請求項5のいずれか一項記載の発明の効果を奏するうえで、脱穀装置(3)と穀粒排出装置(4a)と走行装置(2)の各駆動状態を精度よく検出することができ、エンジン停止制御の精度が高まる。
【0021】
請求項7記載の発明によると、上記請求項1から請求項5のいずれか一項記載の発明の効果を奏するうえで、脱穀装置(3)と穀粒貯留装置(4)の各駆動状態を精度よく検出でき、走行装置(2)の駆動状態を変速レバー(T)の操作位置から迅速に検出できるため、エンジン停止制御の応答性が高まる。
【図面の簡単な説明】
【0022】
【図1】コンバインの側面図である。
【図2】コンバインの側面図である。
【図3】コンバインの平面図である。
【図4】制御装置のブロック図である。
【図5】エンジン自動停止・始動制御のフローチャートである。
【図6】盗難防止制御装置の概念を示すブロック図である。
【図7】燃料残量表示装置の説明図である。
【図8】図7のパネルの拡大図である。
【発明を実施するための形態】
【0023】
この発明の実施の形態を、自脱型のコンバインを例示して説明する。
(機体構成)
図1、図2、図3に示すように、コンバインは、機体フレーム1の下方に走行装置2を設け、機体フレーム1の上部左側には脱穀装置3を搭載し、機体フレーム1の上部右側には穀粒貯留装置4を搭載し、機体フレーム1上における穀粒貯留装置4の前側には電子ガバナ式或いはコモンレール燃料噴射式のエンジンEを搭載し、走行装置2の前方位置には刈取装置5を設けて構成する。
(走行装置の構成)
前記走行装置2は、機体フレーム1の前部に、エンジンEから静油圧式無段変速装置(図示省略)を介して駆動されるミッションケース6を取り付け、このミッションケース6から駆動される左右の駆動輪7と多数の転輪8にわたって、クローラ9を巻きかけて構成する。前記静油圧式無段変速装置は、キャビンによって覆われた操縦部Sの一側に備えた変速レバーTの前後傾動操作によって変速されるように、この静油圧式無段変速装置のトラニオン軸と変速レバーTとを機械的あるいは電気的に連繋している。尚、前記静油圧式無段変速装置には、油圧モータ側の斜板角度を2位置に切り換えて出力を2段階に変速する機構を備える。また、前記ミッションケース6には、このミッションケース6内の伝動軸を制動する駐車ブレーキPを備え、操縦部Sのステップ上に配置した駐車ブレーキペダルQの踏み込み操作によってこの駐車ブレーキPが制動作動するよう連繋している。
(脱穀装置の構成)
前記脱穀装置3は、扱胴、ニ番処理胴、排塵処理胴、排塵ファンを内装する上部の扱室3aと、揺動選別棚、唐箕、一番移送螺旋、ニ番移送螺旋を内装する下部の選別室3bから構成し、扱室3aの外側部には、フィードチェン3cの上側に対向する挟扼杆3dを設ける。エンジンEの出力軸に備えた出力プーリと、脱穀装置3の入力軸に備えた入力プーリとに伝動ベルトを巻き掛け、この伝動ベルトを緊張および弛緩させるテンションプーリをテンションアームに支持して備えて脱穀クラッチを構成し、この入力軸から、前記扱胴、二番処理胴、排塵処理胴、排塵ファン、揺動選別棚、唐箕、一番移送螺旋、二番移送螺旋、フィードチェン3cが連動して駆動される構成としている。尚、上記テンションアームを回動させて脱穀クラッチを接続および遮断操作する電動モータを備えている。
(穀粒排出装置の構成)
前記穀粒貯留装置4は、箱型の容器に形成し、該穀粒貯留装置4には、内部に貯留した穀粒を外部へ排出する穀粒排出装置4aを備える。即ち、穀粒貯留装置4の後側に立設した旋回自在の揚穀筒10の上端部に、排出筒11の基部を昇降回動自在に接続する。そして、穀粒貯留装置4の底部に前後方向に配置した底部移送螺旋と、揚穀筒10に内装した揚穀螺旋と、排出筒11に内装した排出螺旋とを連動して穀粒排出装置4aを構成し、前記底部移送螺旋の前端部に備えた入力プーリとエンジンEによって駆動される出力プーリとの間に伝動ベルトを巻き掛け、この伝動ベルトを緊張および弛緩させるテンションプーリをテンションアームに支持して備えて穀粒排出クラッチを構成している。尚、上記テンションアームを回動させて穀粒排出クラッチを接続および遮断操作する電動モータを備えている。
(刈取装置の構成)
前記刈取装置5は、機体フレーム1の前部に縦支持フレーム12の後端部を上下回動自在に支持し、この縦支持フレーム12の前端部に左右方向の下部ギヤケース13の左右中間部を連結し、この下部ギヤケース13の前側に固定した分草フレーム14の中間部に左右方向のバリカン式の刈刃15を取り付け、分草フレーム14の前部に引起装置16の下部を取り付け、分草フレーム14の前端部に分草体17を取り付けて構成する。該刈取装置5は、前記ミッションケース6の中間出力軸からテンションクラッチ式の刈取クラッチを介して駆動される構成とする。この刈取クラッチは、上述の脱穀クラッチ操作用の電動モータで作動する。尚、刈取装置5を、エンジンEによって駆動される刈取装置駆動用の静油圧式無段変速装置を介して変速駆動する構成としてもよい。また、この刈取装置5と機体フレーム1側との間に、刈取装置5を昇降させる刈取昇降シリンダ18を設け、操縦部Sの前部に設けた操向レバーUの前後傾動操作によってこの刈取昇降シリンダ18が伸縮作動するよう連繋している。この操向レバーUを左右傾動操作することで、左右の駆動輪7,7の駆動速度が異なる速度となって機体が旋回する。
(制御装置の構成)
図4に示すように、制御装置19は、エンジン停止/始動制御用の中央演算処理ユニット20に対して、デジタル信号入力処理回路21とアナログ信号入力処理回路22と回転信号入力処理回路23を入力接続し、タイマーカウント回路24を入出力可能に接続し、エンジン停止出力処理回路25とエンジン始動出力処理回路26を出力接続して構成する。
【0024】
前記デジタル信号入力処理回路21の入力ポートには、エンジン自動停止制御を有効/無効に切り換えるエンジン自動停止選択スイッチ27と、上述の脱穀クラッチのテンションアームの回動位置から、この脱穀クラッチの接続/遮断状態を検出する第1センサ28と、上述の穀粒排出クラッチのテンションアームの回動位置から、この穀粒排出クラッチの接続/遮断状態を検出する第2センサ29と、穀粒排出クラッチのテンションアームを回動させる電動モータを起動および停止操作する排出開始/停止操作スイッチ30と、駐車ブレーキペダルQの踏み込み位置を検出する駐車ブレーキスイッチ31を接続する。
【0025】
前記アナログ信号入力処理回路22の入力ポートには、操縦部Sの側部に備えた刈取・脱穀操作レバーKの操作位置を検出する刈取・脱穀ポジションセンサ32と、前記変速レバーTの前後傾動操作位置を検出する変速ポジションセンサ(第3センサ)33と、前記操向レバーUの前後傾動操作位置を検出する刈取昇降ポジションセンサ34を接続する。尚、刈取・脱穀操作レバーKが脱穀クラッチ接続位置へ操作されると、前記電動モータが所定量作動して脱穀クラッチのテンションアームが緊張側へ作動し、脱穀クラッチが接続される。刈取・脱穀操作レバーKが脱穀クラッチ接続位置を越えて刈取クラッチ接続位置まで操作されると、前記電動モータが更に所定量作動して刈取クラッチのテンションアームも緊張側へ作動し、刈取クラッチが接続され、脱穀クラッチと刈取クラッチの両方が接続された状態となる。
【0026】
前記回転信号入力処理回路23の入力ポートには、前記ミッションケース6内の伝動軸の回転速度から車速を検出する車速センサ(第3センサ)35と、前記エンジンEの出力軸の回転速度を検出するエンジン回転速度センサ36を接続する。
【0027】
前記エンジン停止出力処理回路25の出力ポートには、エンジンEへの燃料供給経路を遮断してエンジンEを停止させるエンジン停止リレー37を接続する。
前記エンジン始動出力処理回路26の出力ポートには、エンジンEへの燃料供給経路を接続すると共に、エンジン始動用のセルモータを起動するエンジン始動リレー38を接続する。
(制御フロー)
図5に示すフローチャートに基づいて、エンジン自動停止・始動制御の流れを説明する。
【0028】
前記エンジン自動停止選択スイッチ27がON操作されると、エンジン自動停止・始動制御が有効となる。
そして、第2センサ29によって穀粒排出クラッチが遮断状態にあることが検出され、第1センサ28によって脱穀クラッチが遮断状態にあることが検出され、変速ポジションセンサ33によって変速レバーTが中立位置に操作されていることが検出され、車速センサ35によって停車状態あるいは停車状態に近似した車速が検出され、駐車ブレーキスイッチ31によって駐車ブレーキペダルQの踏み込みが検出された場合に、エンジン停止リレー37へ出力がなされ、エンジンEへの燃料供給経路が遮断されてエンジンEが停止する。このルートR1がエンジン自動停止制御のメインフローである。上記駐車ブレーキスイッチ31による駐車ブレーキペダルQの踏み込み位置の検出において、駐車ブレーキペダルQの踏み込みが検出されない場合には、エンジン停止リレー37への出力はなされない。
【0029】
このようにしてエンジンEが自動停止した状態において、上記駐車ブレーキスイッチ31によって駐車ブレーキペダルQの踏み込みが解除されたことが検出された場合には、エンジン始動リレー38へ出力がなされ、燃料供給の開始と共にセルモータが起動し、エンジンEが始動される。このルートL1がエンジン自動始動制御の第1フローである。
【0030】
また、上述のようにしてエンジンEが自動停止した状態で、上記第2センサ29による穀粒排出クラッチの接続/遮断状態の検出において、穀粒排出クラッチが接続状態に切り換わったことが検出され、エンジン回転速度センサ36で検出されるエンジンEの出力軸の回転速度が停止速度(0rpm)あるいは停止速度に近似した速度であった場合には、エンジン始動リレー38へ出力がなされ、燃料供給の開始と共にセルモータが起動し、エンジンEが始動される。このルートL2がエンジン自動始動制御の第2フローである。
【0031】
また、上述のようにしてエンジンEが自動停止した状態において、第1センサ28によって脱穀クラッチが接続状態に切り換わったことが検出された場合には、エンジン始動リレー38へ出力がなされ、燃料供給の開始と共にセルモータが起動し、エンジンEが始動される。このルートL3がエンジン自動始動制御の第3フローである。
【0032】
尚、このフローチャートには含まれていないが、上述のようにしてエンジンEが自動停止した状態で、刈取昇降ポジションセンサ34によって刈取装置5の上昇操作が検出された場合には、エンジン始動リレー38へ出力がなされ、燃料供給の開始と共にセルモータが起動し、エンジンEが始動される。このルートL4がエンジン自動始動制御の第4フローである。
(エンジン自動停止制御、エンジン自動始動制御の効果)
ルートR1のフローに従い、作業を終了ないし中断し、脱穀装置3及び穀粒排出装置4aの駆動が停止している状態で、駐車ブレーキPが制動操作された場合に、エンジンEの駆動を自動的に停止させることで、従来技術に比較して燃料消費量を低減でき、コンバインの燃費改善によって低コスト農業に寄与することができる。
【0033】
また、ルートL1のフローに従い、駐車ブレーキPによる制動が解除操作された場合に、停止していたエンジンEが自動的に始動するので、走行開始のためのエンジン始動操作を省略でき、機動性を高めることができる。
【0034】
また、ルートL2のフローに従い、穀粒排出装置4aが駆動開始操作された場合に、停止していたエンジンEが自動的に始動するので、穀粒排出作業開始のためのエンジン始動操作を省略でき、穀粒排出作業の能率を向上させることができる。
【0035】
また、ルートL3のフローに従い、脱穀装置3が駆動開始操作された場合に、停止していたエンジンEが自動的に始動するので、脱穀作業開始のためのエンジン始動操作を省略でき、脱穀作業の能率を向上させることができる。
【0036】
また、ルートL4に従い、刈取装置5が上昇操作された場合に、停止していたエンジンEが自動的に始動するので、刈取作業開始のためのエンジン始動操作を省略でき、刈取作業の能率を向上させることができる。
(盗難防止制御)
図6に示すように、モニタ制御部39に対して、エンジンE側に備えたECU40をCAN通信ラインによって相互通信可能に接続し、このECU40の出力側にエンジン停止リレー37を接続する。また、モニタ制御部39の出力側に、操縦部Sに備えたモニター41を同期通信ラインによって接続する。
【0037】
該モニター41の周囲には、複数の操作スイッチが備えられており、オペレータがこれらの操作スイッチによって4桁の暗証コードを設定し、次回のエンジン始動操作時に、この4桁の暗証コードが入力されない場合には、エンジン停止リレー37へ出力がなされ、エンジンEを始動できないように牽制する盗難防止システムを構成している。
【0038】
そして、暗証コードの設定後、最初(1回目)に入力した4桁のコードが設定された暗証コードと一致しない場合には、ブザーを断続的に出力すると共に、モニター41に「設定キーが違います」と表示する。このブザーの断続出力は設定時間で停止する。2回目に入力した4桁のコードが設定された暗証コードと一致しない場合も同様の出力がなされる。
【0039】
そして、入力したコードが設定された暗証コードと一致しない状態が3回連続した場合には、警笛とブザーを連続出力すると共に、モニター41に「設定キーが違います」と表示する。この警笛の出力は、メインキーをOFFするまで継続される。
(燃料残量表示)
図7に示すように、脱穀装置3の後部に装着される排藁カッターの外側を覆う下側のカバー42に、燃料タンク43の給油口44が臨む開口部を形成し、この開口部を開閉自在に覆う蓋板45を設けている。
【0040】
図7、図8に示すように、このカバー42の上側に設けたカバー46には、燃料タンク43内のフロート式のセンサーによって検出される燃料残量を文字表示すると共に段階的にグラフィック表示する燃料残量モニター47と、燃料残量をLEDで段階的に点灯表示する燃料残量表示ランプ48と、エンジンEを始動/停止操作可能なキースイッチ49を備えたパネル50を設ける。このパネル50には、各表示機能を司るコントローラを、本機側コントローラ、中央演算処理ユニット20、ECU40等とは独立して備え、このコントローラに必要な電力、および燃料残量モニター47、燃料残量表示ランプ48の表示に必要な電力を、コンバインの機体上(脱穀装置3の上面など)に備えた太陽光発電パネル51によって発電された電力でまかなう構成としている。
【0041】
このように、燃料タンク43の給油口44の近傍にキースイッチ49を配置することで、燃料補給の際にエンジンEを停止させるためにわざわざ操縦部Sにまわってメインキーを操作する必要がなく、作業能率が向上する。
(ナビゲーションシステム)
コンバインの機体にGPS用のレシーバと高度計(気圧計)を搭載し、機体の2次元位置と高度からマップ上での機体の位置検出精度を向上させ、この位置検出情報と機体に搭載した各種センサ(穀粒貯留装置4内の貯留穀粒量を検出するセンサ、機体フレーム1の左右傾斜角度を検出する傾斜センサ等)からの検出情報を基に、機体の走行安全性を判定して報知する構成としてもよい。
【0042】
これにより、機体の高度情報から機体が法面を移動しているか否かを判定し、更に、機体に搭載したセンサで検出される機体の傾斜や貯留穀粒量に基づいて、安全性を総合的に判定して報知することができ、安全性が向上する。
【符号の説明】
【0043】
2 走行装置
3 脱穀装置
4 穀粒貯留装置
4a 穀粒排出装置
5 刈取装置
19 制御装置
28 第1センサ
29 第2センサ
33 変速ポジションセンサ(第3センサ)
35 車速センサ(第3センサ)
E エンジン
P 駐車ブレーキ
T 変速レバー
【特許請求の範囲】
【請求項1】
機体を走行させる走行装置(2)と、該走行装置(2)を制動する駐車ブレーキ(P)と、圃場の穀稈を刈り取る刈取装置(5)と、刈り取った穀稈を脱穀する脱穀装置(3)と、脱穀した穀粒を貯留する穀粒貯留装置(4)と、該穀粒貯留装置(4)内の穀粒を排出する穀粒排出装置(4a)と、機体各部を駆動するエンジン(E)を備えたコンバインにおいて、前記脱穀装置(3)の駆動状態を検出する第1センサ(28)と、前記穀粒排出装置(4a)の駆動状態を検出する第2センサ(29)と、前記走行装置(2)の駆動状態を検出する第3センサ(33,35)を設け、前記第1センサ(28)及び第2センサ(29)によって脱穀装置(3)及び穀粒排出装置(4a)の駆動停止状態が検出され且つ第3センサ(33,35)によって走行装置(2)の駆動停止状態が検出された状態において、前記駐車ブレーキ(P)が制動操作された場合に、エンジン(E)の駆動を自動的に停止させる制御装置(19)を設けたことを特徴とするコンバイン。
【請求項2】
前記エンジン(E)の駆動が自動的に停止された状態において、駐車ブレーキ(P)による制動が解除操作された場合に、エンジン(E)が自動的に始動する構成とした請求項1記載のコンバイン。
【請求項3】
前記エンジン(E)の駆動が自動的に停止された状態において、脱穀装置(3)が駆動開始操作された場合に、エンジン(E)が自動的に始動する構成とした請求項1または請求項2記載のコンバイン。
【請求項4】
前記エンジン(E)の駆動が自動的に停止された状態において、穀粒排出装置(4a)が駆動開始操作された場合に、エンジン(E)が自動的に始動する構成とした請求項1または請求項2または請求項3記載のコンバイン。
【請求項5】
前記エンジン(E)の駆動が自動的に停止された状態において、刈取装置(5)が上昇操作された場合に、エンジン(E)が自動的に始動する構成とした請求項1から請求項4のいずれか一項記載のコンバイン。
【請求項6】
前記第1センサ(28)を、エンジン(E)から脱穀装置(3)への伝動経路に備えた脱穀クラッチの接続状態を検出する脱穀クラッチセンサとして備え、前記第2センサ(29)を、エンジン(E)から穀粒排出装置(4a)への伝動経路に備えた穀粒排出クラッチの接続状態を検出する穀粒排出クラッチセンサとして備え、前記第3センサ(35)を、走行装置(2)の駆動速度を検出する車速センサとして備えた請求項1から請求項5のいずれか一項記載のコンバイン。
【請求項7】
前記第1センサ(28)を、エンジン(E)から脱穀装置(3)への伝動経路に備えた脱穀クラッチの接続状態を検出する脱穀クラッチセンサとして備え、前記第2センサ(29)を、エンジン(E)から穀粒排出装置(4a)への伝動経路に備えた穀粒排出クラッチの接続状態を検出する穀粒排出クラッチセンサとして備え、前記第3センサ(33)を、走行装置(2)の駆動速度を変速操作する変速レバー(T)の操作位置を検出する変速操作位置センサとして備えた請求項1から請求項5のいずれか一項記載のコンバイン。
【請求項1】
機体を走行させる走行装置(2)と、該走行装置(2)を制動する駐車ブレーキ(P)と、圃場の穀稈を刈り取る刈取装置(5)と、刈り取った穀稈を脱穀する脱穀装置(3)と、脱穀した穀粒を貯留する穀粒貯留装置(4)と、該穀粒貯留装置(4)内の穀粒を排出する穀粒排出装置(4a)と、機体各部を駆動するエンジン(E)を備えたコンバインにおいて、前記脱穀装置(3)の駆動状態を検出する第1センサ(28)と、前記穀粒排出装置(4a)の駆動状態を検出する第2センサ(29)と、前記走行装置(2)の駆動状態を検出する第3センサ(33,35)を設け、前記第1センサ(28)及び第2センサ(29)によって脱穀装置(3)及び穀粒排出装置(4a)の駆動停止状態が検出され且つ第3センサ(33,35)によって走行装置(2)の駆動停止状態が検出された状態において、前記駐車ブレーキ(P)が制動操作された場合に、エンジン(E)の駆動を自動的に停止させる制御装置(19)を設けたことを特徴とするコンバイン。
【請求項2】
前記エンジン(E)の駆動が自動的に停止された状態において、駐車ブレーキ(P)による制動が解除操作された場合に、エンジン(E)が自動的に始動する構成とした請求項1記載のコンバイン。
【請求項3】
前記エンジン(E)の駆動が自動的に停止された状態において、脱穀装置(3)が駆動開始操作された場合に、エンジン(E)が自動的に始動する構成とした請求項1または請求項2記載のコンバイン。
【請求項4】
前記エンジン(E)の駆動が自動的に停止された状態において、穀粒排出装置(4a)が駆動開始操作された場合に、エンジン(E)が自動的に始動する構成とした請求項1または請求項2または請求項3記載のコンバイン。
【請求項5】
前記エンジン(E)の駆動が自動的に停止された状態において、刈取装置(5)が上昇操作された場合に、エンジン(E)が自動的に始動する構成とした請求項1から請求項4のいずれか一項記載のコンバイン。
【請求項6】
前記第1センサ(28)を、エンジン(E)から脱穀装置(3)への伝動経路に備えた脱穀クラッチの接続状態を検出する脱穀クラッチセンサとして備え、前記第2センサ(29)を、エンジン(E)から穀粒排出装置(4a)への伝動経路に備えた穀粒排出クラッチの接続状態を検出する穀粒排出クラッチセンサとして備え、前記第3センサ(35)を、走行装置(2)の駆動速度を検出する車速センサとして備えた請求項1から請求項5のいずれか一項記載のコンバイン。
【請求項7】
前記第1センサ(28)を、エンジン(E)から脱穀装置(3)への伝動経路に備えた脱穀クラッチの接続状態を検出する脱穀クラッチセンサとして備え、前記第2センサ(29)を、エンジン(E)から穀粒排出装置(4a)への伝動経路に備えた穀粒排出クラッチの接続状態を検出する穀粒排出クラッチセンサとして備え、前記第3センサ(33)を、走行装置(2)の駆動速度を変速操作する変速レバー(T)の操作位置を検出する変速操作位置センサとして備えた請求項1から請求項5のいずれか一項記載のコンバイン。
【図1】


【図2】

【図3】
【図4】

【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2013−111045(P2013−111045A)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2011−261766(P2011−261766)
【出願日】平成23年11月30日(2011.11.30)
【出願人】(000000125)井関農機株式会社 (3,813)
【Fターム(参考)】
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成23年11月30日(2011.11.30)
【出願人】(000000125)井関農機株式会社 (3,813)
【Fターム(参考)】
[ Back to top ]