
移動装置
【課題】被駆動体を移動させる際の圧電体振動子の駆動開始からのタイムラグを少なくした移動装置を提供する。
【解決手段】移動装置は、圧電体振動子を備える。圧電体振動子に対して、伸縮モード振動を励起する第1交流電圧、及び屈曲モード振動を励起する第2交流電圧を印加する回路部を備える。回路部は、圧電体振動子の伸縮モード振動と屈曲モード振動に基づく楕円運動によって被駆動体を移動させるために、第1交流電圧を印加した時点t1の後であって、第1交流電圧の振幅が定常状態になる時点t3までの間に、第2交流電圧の印加を開始する。
【解決手段】移動装置は、圧電体振動子を備える。圧電体振動子に対して、伸縮モード振動を励起する第1交流電圧、及び屈曲モード振動を励起する第2交流電圧を印加する回路部を備える。回路部は、圧電体振動子の伸縮モード振動と屈曲モード振動に基づく楕円運動によって被駆動体を移動させるために、第1交流電圧を印加した時点t1の後であって、第1交流電圧の振幅が定常状態になる時点t3までの間に、第2交流電圧の印加を開始する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、移動装置に関し、特に被駆動体を効率よく移動させる移動装置に関する。
【背景技術】
【0002】
圧電体振動子を使って、被駆動体を一次元の任意の方向に移動させる移動装置が提案されている。特許文献1は、一方のアクチュエータの振動が定常状態になった時に、他方のアクチュエータの駆動を開始する移動装置を開示する。
【特許文献1】特開平08−237970号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかし、特許文献1の装置は、一方のアクチュエータの振動が定常状態になった後に、他方のアクチュエータの駆動が開始されるため、一方のアクチュエータの駆動が開始されてから被駆動体の移動が開始されるまでに時間がかかる。
【0004】
したがって本発明の目的は、被駆動体を移動させる際の圧電体振動子の駆動開始からのタイムラグを少なくした移動装置を提供することである。
【課題を解決するための手段】
【0005】
本発明に係る移動装置は、圧電体振動子と、圧電体振動子に対して、伸縮モード振動を励起する第1交流電圧、及び屈曲モード振動を励起する第2交流電圧を印加する回路部とを備え、回路部は、圧電体振動子の伸縮モード振動と屈曲モード振動に基づく楕円運動によって被駆動体を移動させるために、第1交流電圧を印加した後であって、第1交流電圧の振幅が定常状態になる時点までの間に、第2交流電圧の印加を開始する。
【0006】
好ましくは、回路部は、第1交流電圧の振幅を検出する検出部と、振幅が一定値以上の場合に、第2交流電圧の印加を開始する印加制御部とを有する。
【0007】
さらに好ましくは、印加制御部は、第1交流電圧の振幅が定常状態における振幅の半分となった時に、第2交流電圧の印加を開始する。
【0008】
また、好ましくは、圧電体振動子は、被駆動体によって付勢され、第2交流電圧の印加開始タイミングは、第1交流電圧の印加開始から、第1交流電圧の印加によって励起される伸縮モード振動によって、圧電体振動子が被駆動体を押す力が、付勢される力を上回る時点までの時間に対応する。
【発明の効果】
【0009】
以上のように本発明によれば、被駆動体を移動させる際の圧電体振動子の駆動開始からのタイムラグを少なくした移動装置を提供することができる。
【発明を実施するための最良の形態】
【0010】
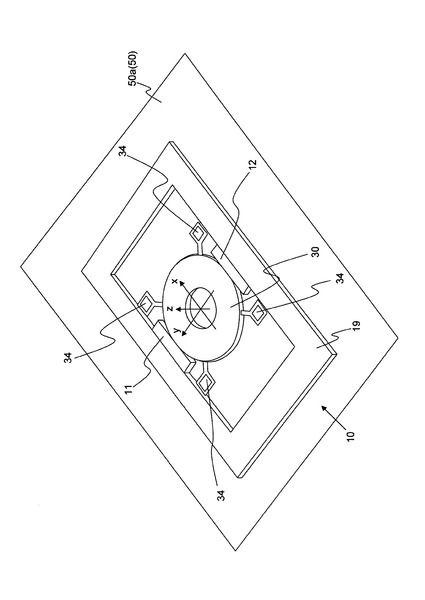
以下、本発明の実施形態について、図を用いて説明する。移動装置は、水平方向移動部10を有する可動部と、圧電体振動子30、固定台50、及び回路部70とを有する固定部とを備える。なお、方向を説明するために、移動装置において水平方向移動部10の移動方向を第1方向x、第1方向xと直交する圧電体振動子30の付勢方向を第2方向y、第1方向xと第2方向yと直交する方向を第3方向zとして説明する。
【0011】
水平方向移動部(被駆動体)10は、第1、第2摩擦部材11、12、及び水平方向移動枠19を有する。水平方向移動部10は、第1方向xに移動可能である。従って、水平方向移動部10に、移動させたい部材を固定することにより、その部材を第1方向xに移動させることができる。
【0012】
第1、第2摩擦部材11、12は、直方体形状で、第2方向yに垂直な平面の一方は、圧電体振動子30と接触し、圧電体振動子30の振動により水平方向移動枠19と共に第1方向xに移動可能であり、他方は水平方向移動枠19の内側に取り付けられる。
【0013】
水平方向移動枠19は、内側に第3方向zに垂直な矩形の孔を有する平板状の枠であり、かかる内側の矩形孔に第1、第2摩擦部材11、12が取り付けられ、圧電体振動子30が配置される。
【0014】
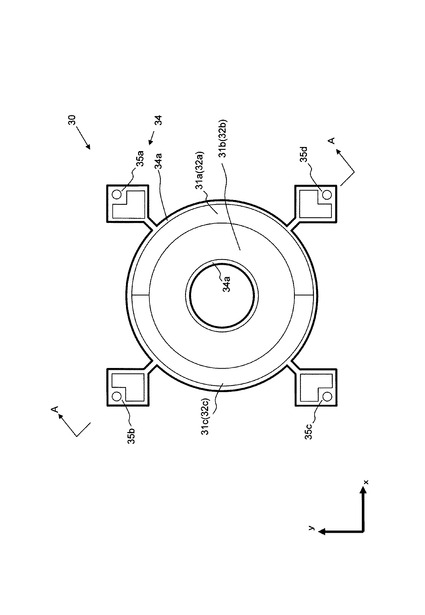
圧電体振動子30は、中空円柱形状の第1、第2圧電素子(圧電セラミックリング)31、32と、薄い金属の弾性板で構成されるシム34から構成され、シム34の両面(円柱形状の外壁部及び第3方向zと垂直な上面、下面)には第1、第2圧電素子31、32が固着される(図2参照)。
【0015】
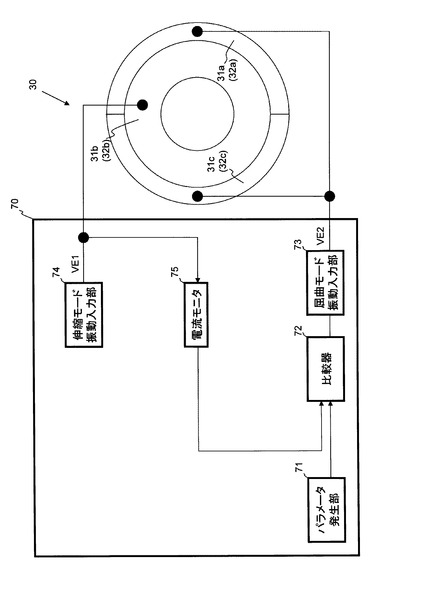
第1、第2圧電素子31、32の第3方向zから見た表面には電極が設けられる。電極は第3方向zからみて3つに分割され、第1圧電素子31の第1、第2、第3電極31a、31b、31c、第2圧電素子32の第4、第5、第6電極32a、32b、32cが取り付けられる。なお、電極、及び圧電素子は、シム34の上面、下面のいずれか一方にだけ取り付けられた形態であってもよいが、本実施形態のように両面に取り付けられた形態の方が、より強い駆動力を得ることが出来る。
【0016】
第1〜第3電極31a〜31cは第1方向xに並べて配置される。伸縮モード振動を励起するための第1交流電圧VE1の印加に使用される第2電極31bは、シム本体部34a(第1圧電素子31)上の中央部に配置される。屈曲モード振動を励起するための第2交流電圧VE2の印加に使用される第1、第3電極31a、31cは、シム本体部34a(第1圧電素子31)上の第1方向xの端部を含む外周部に配置される。第1、第3電極31a、31cは、圧電体振動子30のxy平面上の中心にxy平面上で対向する位置関係に配置される。
【0017】
第2電極31bと第5電極32bとは、第3方向zで対向するように配置され、同じ波形の第1交流電圧VE1が回路部70の伸縮モード振動入力部74から印加される。第1電極31aと第4電極32aとは、第3方向zで対向するように配置され、同じ波形の第2交流電圧VE2が回路部70の屈曲モード振動入力部73から印加される。第3電極31cと第6電極32cとは、第3方向zで対向するように配置され、同じ波形の第2交流電圧VE2が回路部70の屈曲モード振動入力部73から印加される。
【0018】
第1〜第3電極31a〜31cが並べられて、第1圧電素子31には、真円の環状体形状(ドーナツ形状)の電極群が構成される。第4〜第6電極32a〜32cが並べられて、第2圧電素子32には、真円の環状体形状(ドーナツ形状)の電極群が構成される。
【0019】
第2、第5電極31b、32bへの第1交流電圧VE1の印加により、圧電体振動子30は半径方向(シム本体部34aの上面及び下面の中心から外壁部への放射方向)に伸縮する伸縮モード振動が励起される。第1、第3、第4、第6電極31a、31c、32a、32cへの第2交流電圧VE2の印加により、圧電体振動子30は第1方向xに屈曲振動する屈曲モード振動が励起される。
【0020】
屈曲モード振動を励起するための、第1、第3、第4、第6電極31a、31c、32a、32cへの第2交流電圧VE2の印加は、伸縮モード振動を励起するための、第2、5電極への第1交流電圧VE1の印加開始後であって、伸縮モード振動が定常状態になるまでの間に開始される。電圧印加開始タイミング制御については、後述する。
【0021】
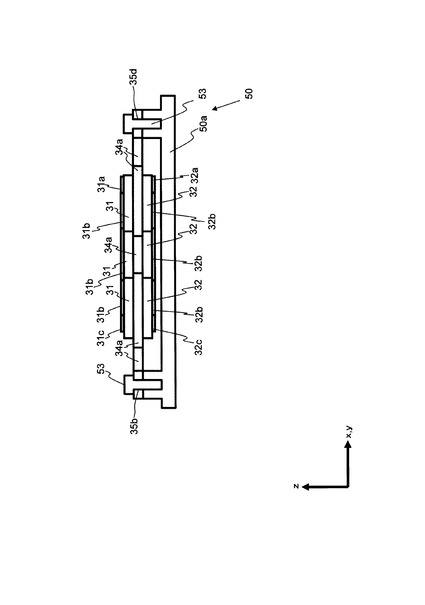
シム34は、第1、第2圧電素子31、32を両面に固着した中空円柱形状のシム本体部34a、固定台50に支持される第1、第2、第3、第4支持部35a、35b、35c、35dを有する(図2、3参照)。シム本体部34aは、円柱形状の外壁部で、第1摩擦部材11の付勢力と、第1摩擦部材11の付勢力に対する第2摩擦部材12の反力によって第2方向yに付勢される。
【0022】
第1、第2、第3、第4支持部35a、35b、35c、35dは、シム本体部34aから被駆動体を移動させる第1方向xとの間を成す角が45度(または135度)を有する方向に突出した部分で、それぞれが有する孔に固定部材53が挿入されることによって固定台50に取り付けられる。これにより、シム34を含む圧電体振動子30は固定台50に固定されて移動しない。一方、圧電体振動子30の振動により水平方向移動部10は第1方向xに移動可能である。
【0023】
それぞれの電極に電圧が印加されない状態においては、第1、第2圧電素子31、32は変形を起こさず静止している。第2、第5電極31b、32bに第1交流電圧VE1が印加されると、第1、第2圧電素子31、32の変形に伴って圧電体振動子30は、半径方向(シム本体部34aの上面及び下面の中心から外壁部への放射方向)に伸縮する伸縮モード振動(シム34の中心穴34hが膨張収縮を繰り返すような縦振動)が励起される。第1、第3、第4、第6電極31a、31c、32a、32cに第2交流電圧VE2が印加されると、第1、第2圧電素子31、32の変形に伴って圧電体振動子30は、第1方向xに屈曲振動する屈曲モード振動(シム34の中心穴34hが第1方向xに往復運動するような駆動方向の横振動)が励起される。
【0024】
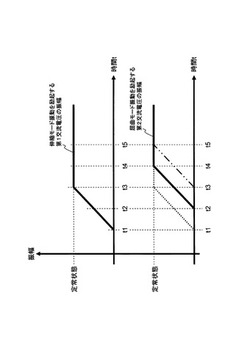
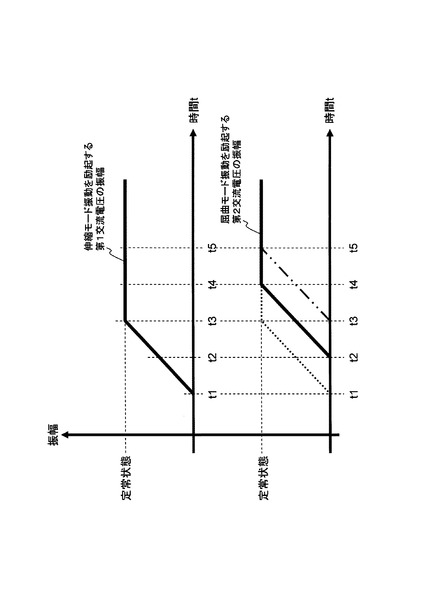
第2、第5電極31b、32bへの電圧印加が開始されると、徐々に第1交流電圧VE1の振幅が大きくなり、一定時間(t1からt3までの期間)かけて、第1交流電圧VE1の振幅が一定する定常状態になる。これに伴い、第1交流電圧VE1の電圧印加が開始されると、徐々に圧電体振動子30の伸縮モード振動の振幅が大きくなり、一定時間(t1からt3までの期間)かけて、圧電体振動子30の伸縮モード振動の振幅が一定する定常状態になる(図5上段参照)。
【0025】
第1、第3、第4、第6電極31a、31c、32a、32cへの電圧印加が開始されると、徐々に第2交流電圧VE2の振幅が大きくなり、一定時間(t2からt4までの期間)かけて、第2交流電圧VE2の振幅が一定する定常状態になる。これに伴い、第2交流電圧VE2の電圧印加が開始されると、徐々に圧電体振動子30の屈曲モード振動の振幅が大きくなり、一定時間(t2からt4までの期間)かけて、圧電体振動子30の屈曲モード振動の振幅が一定する定常状態になる(図5下段参照)。
【0026】
屈曲モード振動、及び伸縮モード振動により、シム本体部34aの外壁部で、第1、第2摩擦部材11、12と接触する部分(第1、第2摩擦部材11、12のシム本体部34aの外壁部を第2方向yに付勢する部分)は、楕円運動を行う。
【0027】
この楕円運動により、シム本体部34aの外壁部分を第2方向yに付勢した状態で接触する第1、第2摩擦部材11、12は、固定台50及び圧電体振動子30に対して第1方向xに移動せしめられ、これに伴って水平方向移動部10が第1方向xに移動せしめられる。
【0028】
固定台50は、固定台本体部50a、水平方向移動部10を第1方向xに摺動自在に支持する係合部材(不図示)、及び圧電体振動子30を固定する固定部材53を有する。
【0029】
回路部70は、パラメータ発生部71、比較器72、屈曲モード振動入力部73、伸縮モード振動入力部74、及び電流モニタ75を有する(図4参照)。
【0030】
パラメータ発生部71は、伸縮モード振動を励起開始(第2、第5電極31b、32bへの第1交流電圧VE1の印加開始)時期に対して、屈曲モード振動を励起開始(第1、第3、第4、第6電極31a、31c、32a、32cへの第2交流電圧VE2の印加開始)時期を遅らせるタイミングを、パラメータ(第1割合tr1)を使って比較器72に出力する。第1割合tr1は、屈曲モード振動励起開始時点(第2交流電圧VE1の印加開始時点t2)における第1交流電圧VE1の振幅の、定常状態時の第1交流電圧VE1の振幅に対する比率(0<tr1<1、t1〜t2の長さ÷t1〜t3の長さ)を表す。
【0031】
時点t2は、時点t1から伸縮モード振動の励起が開始されてから、伸縮モード振動によって圧電体振動子30が、シム本体部34aを第2方向yに付勢している第1、第2摩擦部材11、12を第2方向yに押し返す力が十分になる(圧電体振動子30が水平方向移動部10を第2方向yに押す力が、第1、第2摩擦部材11、12によって第2方向y付勢される力を上回る)程度に、圧電体振動子30の伸縮モード振動の振幅が大きくなる時点に設定される。従って、第1割合tr1の値は、実験などにより求められる最適な時点t2の値(t1〜t2の長さ)に基づいて算出される。一般的には、印加する第1交流電圧VE1の振幅が定常状態における振幅の半分に達した時点で第2交流電圧VE2の電圧印加を開始させる制御信号を出力するように、tr1=0.5に設定しておくのが望ましい。
【0032】
比較器72は、電流モニタ75から出力される検出電流値と第1交流電圧VE1の定常状態における振幅に対応する電流値との割合を示す第2割合tr2の値と、パラメータ発生部71から出力された第1割合tr1の値とを比較し、第2割合tr2の値が、第1割合tr1以上になった場合に、屈曲モード振動入力部73に対して、屈曲モード振動を励起する第2交流電圧VE2の電圧印加を開始させる制御信号を出力する。
【0033】
屈曲モード振動入力部73は、第1、第3、第4、第6電極31a、31c、32a、32cと接続され、比較器72からの制御信号を受けて、これらの電極に屈曲モード振動を励起する第2交流電圧VE2の印加を行う。
【0034】
伸縮モード振動入力部74は、第2、第5電極31b、32bと接続され、これらの電極に伸縮モード振動を励起する第1交流電圧VE1の印加を行う。
【0035】
電流モニタ75は、伸縮モード振動入力部74から第2、第5電極31b、32bに印加される第1交流電圧VE1の振幅を電流に置き換えて検出し、第1交流電圧VE1の定常状態における振幅に対応する電流値との割合を第2割合tr2として比較器72に出力する。
【0036】
本実施形態の回路部70の構成により、伸縮モード振動を励起する第1交流電圧VE1の印加が開始された後、第1割合tr1に対応する時間(時点t1と時点t2との期間)だけ遅れて屈曲モード振動を励起する第2交流電圧VE2の印加が開始される。
【0037】
被駆動体(水平方向移動部10)を第1方向xに移動させるために、圧電体振動子30に伸縮モード振動と屈曲モード振動が励起される。伸縮モード振動が励起された時点t1の後であって、伸縮モード振動が定常状態になる時点t3前までの一定期間(例えばt1〜t2の期間、約200ms)は、伸縮モード振動によって圧電体振動子30が、シム本体部34aを第2方向yに付勢している第1、第2摩擦部材11、12を第2方向yに押し返す力が十分でない(圧電体振動子30が水平方向移動部10を第2方向yに押す力が、第1、第2摩擦部材11、12によって第2方向y付勢される力を下回る)。
【0038】
そのため、伸縮モード振動と同じタイミングで屈曲モード振動を励起した場合(図5の点線参照)であって、伸縮モード振動が励起された後(時点t1、図5参照)、伸縮モード振動が定常状態になる時点t3前までの一定期間(例えばt1〜t2の期間)は、第1、第2摩擦部材11、12とシム本体部34aとの間で摩擦が生じるだけで第1方向xへの駆動が出来ない。そのため、屈曲モード振動を励起するための電力が無駄に使われるだけでなく、第1、第2摩擦部材11、12やシム本体部34aが摩耗する。
【0039】
伸縮モード振動が定常状態になった時点t3から屈曲モード振動を始める場合(図5の2点鎖線参照)には、屈曲モード振動の振幅が水平方向移動部10を第1方向xに移動させることが可能な程度に大きくなる時点(屈曲モード振動開始時点t3から定常状態になる時点t5までの間)が遅れる。そのため、第1方向xへの移動開始が遅れ、それまでの伸縮モード振動を励起するための電力が無駄に使用されることになる。
【0040】
本実施形態では、伸縮モード振動が励起された時点t1から、伸縮モード振動が定常状態になる時点t3までの間の任意の時点t2から屈曲モード振動の励起が開始されるように、各電極への電圧印加タイミング制御が行われる。これにより、駆動のレスポンスを損ねることなく、電力を無駄に消費することなく、移動制御を行うことが可能になる。
【0041】
なお、被駆動体(水平方向移動部10)を第1方向xに移動させる形態は、本実施形態に限られず、圧電体振動子30に伸縮モード振動と屈曲モード振動を励起して楕円運動を行わせる形態であれば他の形態でもよい。
【図面の簡単な説明】
【0042】
【図1】本実施形態における水平方向移動部、及び圧電体振動子の構成を示す斜視図である。
【図2】圧電体振動子の構成図である。
【図3】図2のA−A線における断面の構成図である。
【図4】回路部、及び電極の構成図である。
【図5】伸縮振動モードを励起するための交流電圧印加と、屈曲モード振動を励起するための交流電圧印加のタイミングを示す図である。
【符号の説明】
【0043】
10 水平方向移動部
11、12 第1、第2摩擦部材
19 水平方向移動枠
30 圧電体振動子
31、32 第1、第2圧電素子
31a、31b、31c 第1、第2、第3電極
32a、32b、32c 第4、第5、第6電極
34 シム
34a シム本体部
35a、35b、35c、35d 第1、第2、第3、第4支持部
50 固定台
50a 固定台本体部
53 固定部材
70 回路部
71 パラメータ発生部
72 比較器
73 屈曲モード振動入力部
74 伸縮モード振動入力部
75 電流モニタ
【技術分野】
【0001】
本発明は、移動装置に関し、特に被駆動体を効率よく移動させる移動装置に関する。
【背景技術】
【0002】
圧電体振動子を使って、被駆動体を一次元の任意の方向に移動させる移動装置が提案されている。特許文献1は、一方のアクチュエータの振動が定常状態になった時に、他方のアクチュエータの駆動を開始する移動装置を開示する。
【特許文献1】特開平08−237970号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかし、特許文献1の装置は、一方のアクチュエータの振動が定常状態になった後に、他方のアクチュエータの駆動が開始されるため、一方のアクチュエータの駆動が開始されてから被駆動体の移動が開始されるまでに時間がかかる。
【0004】
したがって本発明の目的は、被駆動体を移動させる際の圧電体振動子の駆動開始からのタイムラグを少なくした移動装置を提供することである。
【課題を解決するための手段】
【0005】
本発明に係る移動装置は、圧電体振動子と、圧電体振動子に対して、伸縮モード振動を励起する第1交流電圧、及び屈曲モード振動を励起する第2交流電圧を印加する回路部とを備え、回路部は、圧電体振動子の伸縮モード振動と屈曲モード振動に基づく楕円運動によって被駆動体を移動させるために、第1交流電圧を印加した後であって、第1交流電圧の振幅が定常状態になる時点までの間に、第2交流電圧の印加を開始する。
【0006】
好ましくは、回路部は、第1交流電圧の振幅を検出する検出部と、振幅が一定値以上の場合に、第2交流電圧の印加を開始する印加制御部とを有する。
【0007】
さらに好ましくは、印加制御部は、第1交流電圧の振幅が定常状態における振幅の半分となった時に、第2交流電圧の印加を開始する。
【0008】
また、好ましくは、圧電体振動子は、被駆動体によって付勢され、第2交流電圧の印加開始タイミングは、第1交流電圧の印加開始から、第1交流電圧の印加によって励起される伸縮モード振動によって、圧電体振動子が被駆動体を押す力が、付勢される力を上回る時点までの時間に対応する。
【発明の効果】
【0009】
以上のように本発明によれば、被駆動体を移動させる際の圧電体振動子の駆動開始からのタイムラグを少なくした移動装置を提供することができる。
【発明を実施するための最良の形態】
【0010】
以下、本発明の実施形態について、図を用いて説明する。移動装置は、水平方向移動部10を有する可動部と、圧電体振動子30、固定台50、及び回路部70とを有する固定部とを備える。なお、方向を説明するために、移動装置において水平方向移動部10の移動方向を第1方向x、第1方向xと直交する圧電体振動子30の付勢方向を第2方向y、第1方向xと第2方向yと直交する方向を第3方向zとして説明する。
【0011】
水平方向移動部(被駆動体)10は、第1、第2摩擦部材11、12、及び水平方向移動枠19を有する。水平方向移動部10は、第1方向xに移動可能である。従って、水平方向移動部10に、移動させたい部材を固定することにより、その部材を第1方向xに移動させることができる。
【0012】
第1、第2摩擦部材11、12は、直方体形状で、第2方向yに垂直な平面の一方は、圧電体振動子30と接触し、圧電体振動子30の振動により水平方向移動枠19と共に第1方向xに移動可能であり、他方は水平方向移動枠19の内側に取り付けられる。
【0013】
水平方向移動枠19は、内側に第3方向zに垂直な矩形の孔を有する平板状の枠であり、かかる内側の矩形孔に第1、第2摩擦部材11、12が取り付けられ、圧電体振動子30が配置される。
【0014】
圧電体振動子30は、中空円柱形状の第1、第2圧電素子(圧電セラミックリング)31、32と、薄い金属の弾性板で構成されるシム34から構成され、シム34の両面(円柱形状の外壁部及び第3方向zと垂直な上面、下面)には第1、第2圧電素子31、32が固着される(図2参照)。
【0015】
第1、第2圧電素子31、32の第3方向zから見た表面には電極が設けられる。電極は第3方向zからみて3つに分割され、第1圧電素子31の第1、第2、第3電極31a、31b、31c、第2圧電素子32の第4、第5、第6電極32a、32b、32cが取り付けられる。なお、電極、及び圧電素子は、シム34の上面、下面のいずれか一方にだけ取り付けられた形態であってもよいが、本実施形態のように両面に取り付けられた形態の方が、より強い駆動力を得ることが出来る。
【0016】
第1〜第3電極31a〜31cは第1方向xに並べて配置される。伸縮モード振動を励起するための第1交流電圧VE1の印加に使用される第2電極31bは、シム本体部34a(第1圧電素子31)上の中央部に配置される。屈曲モード振動を励起するための第2交流電圧VE2の印加に使用される第1、第3電極31a、31cは、シム本体部34a(第1圧電素子31)上の第1方向xの端部を含む外周部に配置される。第1、第3電極31a、31cは、圧電体振動子30のxy平面上の中心にxy平面上で対向する位置関係に配置される。
【0017】
第2電極31bと第5電極32bとは、第3方向zで対向するように配置され、同じ波形の第1交流電圧VE1が回路部70の伸縮モード振動入力部74から印加される。第1電極31aと第4電極32aとは、第3方向zで対向するように配置され、同じ波形の第2交流電圧VE2が回路部70の屈曲モード振動入力部73から印加される。第3電極31cと第6電極32cとは、第3方向zで対向するように配置され、同じ波形の第2交流電圧VE2が回路部70の屈曲モード振動入力部73から印加される。
【0018】
第1〜第3電極31a〜31cが並べられて、第1圧電素子31には、真円の環状体形状(ドーナツ形状)の電極群が構成される。第4〜第6電極32a〜32cが並べられて、第2圧電素子32には、真円の環状体形状(ドーナツ形状)の電極群が構成される。
【0019】
第2、第5電極31b、32bへの第1交流電圧VE1の印加により、圧電体振動子30は半径方向(シム本体部34aの上面及び下面の中心から外壁部への放射方向)に伸縮する伸縮モード振動が励起される。第1、第3、第4、第6電極31a、31c、32a、32cへの第2交流電圧VE2の印加により、圧電体振動子30は第1方向xに屈曲振動する屈曲モード振動が励起される。
【0020】
屈曲モード振動を励起するための、第1、第3、第4、第6電極31a、31c、32a、32cへの第2交流電圧VE2の印加は、伸縮モード振動を励起するための、第2、5電極への第1交流電圧VE1の印加開始後であって、伸縮モード振動が定常状態になるまでの間に開始される。電圧印加開始タイミング制御については、後述する。
【0021】
シム34は、第1、第2圧電素子31、32を両面に固着した中空円柱形状のシム本体部34a、固定台50に支持される第1、第2、第3、第4支持部35a、35b、35c、35dを有する(図2、3参照)。シム本体部34aは、円柱形状の外壁部で、第1摩擦部材11の付勢力と、第1摩擦部材11の付勢力に対する第2摩擦部材12の反力によって第2方向yに付勢される。
【0022】
第1、第2、第3、第4支持部35a、35b、35c、35dは、シム本体部34aから被駆動体を移動させる第1方向xとの間を成す角が45度(または135度)を有する方向に突出した部分で、それぞれが有する孔に固定部材53が挿入されることによって固定台50に取り付けられる。これにより、シム34を含む圧電体振動子30は固定台50に固定されて移動しない。一方、圧電体振動子30の振動により水平方向移動部10は第1方向xに移動可能である。
【0023】
それぞれの電極に電圧が印加されない状態においては、第1、第2圧電素子31、32は変形を起こさず静止している。第2、第5電極31b、32bに第1交流電圧VE1が印加されると、第1、第2圧電素子31、32の変形に伴って圧電体振動子30は、半径方向(シム本体部34aの上面及び下面の中心から外壁部への放射方向)に伸縮する伸縮モード振動(シム34の中心穴34hが膨張収縮を繰り返すような縦振動)が励起される。第1、第3、第4、第6電極31a、31c、32a、32cに第2交流電圧VE2が印加されると、第1、第2圧電素子31、32の変形に伴って圧電体振動子30は、第1方向xに屈曲振動する屈曲モード振動(シム34の中心穴34hが第1方向xに往復運動するような駆動方向の横振動)が励起される。
【0024】
第2、第5電極31b、32bへの電圧印加が開始されると、徐々に第1交流電圧VE1の振幅が大きくなり、一定時間(t1からt3までの期間)かけて、第1交流電圧VE1の振幅が一定する定常状態になる。これに伴い、第1交流電圧VE1の電圧印加が開始されると、徐々に圧電体振動子30の伸縮モード振動の振幅が大きくなり、一定時間(t1からt3までの期間)かけて、圧電体振動子30の伸縮モード振動の振幅が一定する定常状態になる(図5上段参照)。
【0025】
第1、第3、第4、第6電極31a、31c、32a、32cへの電圧印加が開始されると、徐々に第2交流電圧VE2の振幅が大きくなり、一定時間(t2からt4までの期間)かけて、第2交流電圧VE2の振幅が一定する定常状態になる。これに伴い、第2交流電圧VE2の電圧印加が開始されると、徐々に圧電体振動子30の屈曲モード振動の振幅が大きくなり、一定時間(t2からt4までの期間)かけて、圧電体振動子30の屈曲モード振動の振幅が一定する定常状態になる(図5下段参照)。
【0026】
屈曲モード振動、及び伸縮モード振動により、シム本体部34aの外壁部で、第1、第2摩擦部材11、12と接触する部分(第1、第2摩擦部材11、12のシム本体部34aの外壁部を第2方向yに付勢する部分)は、楕円運動を行う。
【0027】
この楕円運動により、シム本体部34aの外壁部分を第2方向yに付勢した状態で接触する第1、第2摩擦部材11、12は、固定台50及び圧電体振動子30に対して第1方向xに移動せしめられ、これに伴って水平方向移動部10が第1方向xに移動せしめられる。
【0028】
固定台50は、固定台本体部50a、水平方向移動部10を第1方向xに摺動自在に支持する係合部材(不図示)、及び圧電体振動子30を固定する固定部材53を有する。
【0029】
回路部70は、パラメータ発生部71、比較器72、屈曲モード振動入力部73、伸縮モード振動入力部74、及び電流モニタ75を有する(図4参照)。
【0030】
パラメータ発生部71は、伸縮モード振動を励起開始(第2、第5電極31b、32bへの第1交流電圧VE1の印加開始)時期に対して、屈曲モード振動を励起開始(第1、第3、第4、第6電極31a、31c、32a、32cへの第2交流電圧VE2の印加開始)時期を遅らせるタイミングを、パラメータ(第1割合tr1)を使って比較器72に出力する。第1割合tr1は、屈曲モード振動励起開始時点(第2交流電圧VE1の印加開始時点t2)における第1交流電圧VE1の振幅の、定常状態時の第1交流電圧VE1の振幅に対する比率(0<tr1<1、t1〜t2の長さ÷t1〜t3の長さ)を表す。
【0031】
時点t2は、時点t1から伸縮モード振動の励起が開始されてから、伸縮モード振動によって圧電体振動子30が、シム本体部34aを第2方向yに付勢している第1、第2摩擦部材11、12を第2方向yに押し返す力が十分になる(圧電体振動子30が水平方向移動部10を第2方向yに押す力が、第1、第2摩擦部材11、12によって第2方向y付勢される力を上回る)程度に、圧電体振動子30の伸縮モード振動の振幅が大きくなる時点に設定される。従って、第1割合tr1の値は、実験などにより求められる最適な時点t2の値(t1〜t2の長さ)に基づいて算出される。一般的には、印加する第1交流電圧VE1の振幅が定常状態における振幅の半分に達した時点で第2交流電圧VE2の電圧印加を開始させる制御信号を出力するように、tr1=0.5に設定しておくのが望ましい。
【0032】
比較器72は、電流モニタ75から出力される検出電流値と第1交流電圧VE1の定常状態における振幅に対応する電流値との割合を示す第2割合tr2の値と、パラメータ発生部71から出力された第1割合tr1の値とを比較し、第2割合tr2の値が、第1割合tr1以上になった場合に、屈曲モード振動入力部73に対して、屈曲モード振動を励起する第2交流電圧VE2の電圧印加を開始させる制御信号を出力する。
【0033】
屈曲モード振動入力部73は、第1、第3、第4、第6電極31a、31c、32a、32cと接続され、比較器72からの制御信号を受けて、これらの電極に屈曲モード振動を励起する第2交流電圧VE2の印加を行う。
【0034】
伸縮モード振動入力部74は、第2、第5電極31b、32bと接続され、これらの電極に伸縮モード振動を励起する第1交流電圧VE1の印加を行う。
【0035】
電流モニタ75は、伸縮モード振動入力部74から第2、第5電極31b、32bに印加される第1交流電圧VE1の振幅を電流に置き換えて検出し、第1交流電圧VE1の定常状態における振幅に対応する電流値との割合を第2割合tr2として比較器72に出力する。
【0036】
本実施形態の回路部70の構成により、伸縮モード振動を励起する第1交流電圧VE1の印加が開始された後、第1割合tr1に対応する時間(時点t1と時点t2との期間)だけ遅れて屈曲モード振動を励起する第2交流電圧VE2の印加が開始される。
【0037】
被駆動体(水平方向移動部10)を第1方向xに移動させるために、圧電体振動子30に伸縮モード振動と屈曲モード振動が励起される。伸縮モード振動が励起された時点t1の後であって、伸縮モード振動が定常状態になる時点t3前までの一定期間(例えばt1〜t2の期間、約200ms)は、伸縮モード振動によって圧電体振動子30が、シム本体部34aを第2方向yに付勢している第1、第2摩擦部材11、12を第2方向yに押し返す力が十分でない(圧電体振動子30が水平方向移動部10を第2方向yに押す力が、第1、第2摩擦部材11、12によって第2方向y付勢される力を下回る)。
【0038】
そのため、伸縮モード振動と同じタイミングで屈曲モード振動を励起した場合(図5の点線参照)であって、伸縮モード振動が励起された後(時点t1、図5参照)、伸縮モード振動が定常状態になる時点t3前までの一定期間(例えばt1〜t2の期間)は、第1、第2摩擦部材11、12とシム本体部34aとの間で摩擦が生じるだけで第1方向xへの駆動が出来ない。そのため、屈曲モード振動を励起するための電力が無駄に使われるだけでなく、第1、第2摩擦部材11、12やシム本体部34aが摩耗する。
【0039】
伸縮モード振動が定常状態になった時点t3から屈曲モード振動を始める場合(図5の2点鎖線参照)には、屈曲モード振動の振幅が水平方向移動部10を第1方向xに移動させることが可能な程度に大きくなる時点(屈曲モード振動開始時点t3から定常状態になる時点t5までの間)が遅れる。そのため、第1方向xへの移動開始が遅れ、それまでの伸縮モード振動を励起するための電力が無駄に使用されることになる。
【0040】
本実施形態では、伸縮モード振動が励起された時点t1から、伸縮モード振動が定常状態になる時点t3までの間の任意の時点t2から屈曲モード振動の励起が開始されるように、各電極への電圧印加タイミング制御が行われる。これにより、駆動のレスポンスを損ねることなく、電力を無駄に消費することなく、移動制御を行うことが可能になる。
【0041】
なお、被駆動体(水平方向移動部10)を第1方向xに移動させる形態は、本実施形態に限られず、圧電体振動子30に伸縮モード振動と屈曲モード振動を励起して楕円運動を行わせる形態であれば他の形態でもよい。
【図面の簡単な説明】
【0042】
【図1】本実施形態における水平方向移動部、及び圧電体振動子の構成を示す斜視図である。
【図2】圧電体振動子の構成図である。
【図3】図2のA−A線における断面の構成図である。
【図4】回路部、及び電極の構成図である。
【図5】伸縮振動モードを励起するための交流電圧印加と、屈曲モード振動を励起するための交流電圧印加のタイミングを示す図である。
【符号の説明】
【0043】
10 水平方向移動部
11、12 第1、第2摩擦部材
19 水平方向移動枠
30 圧電体振動子
31、32 第1、第2圧電素子
31a、31b、31c 第1、第2、第3電極
32a、32b、32c 第4、第5、第6電極
34 シム
34a シム本体部
35a、35b、35c、35d 第1、第2、第3、第4支持部
50 固定台
50a 固定台本体部
53 固定部材
70 回路部
71 パラメータ発生部
72 比較器
73 屈曲モード振動入力部
74 伸縮モード振動入力部
75 電流モニタ
【特許請求の範囲】
【請求項1】
圧電体振動子と、
前記圧電体振動子に対して、伸縮モード振動を励起する第1交流電圧、及び屈曲モード振動を励起する第2交流電圧を印加する回路部とを備え、
前記回路部は、前記圧電体振動子の前記伸縮モード振動と前記屈曲モード振動に基づく楕円運動によって被駆動体を移動させるために、前記第1交流電圧を印加した後であって、前記第1交流電圧の振幅が定常状態になる時点までの間に、前記第2交流電圧の印加を開始することを特徴とする移動装置。
【請求項2】
前記回路部は、前記第1交流電圧の振幅を検出する検出部と、前記振幅が一定値以上の場合に、前記第2交流電圧の印加を開始する印加制御部とを有することを特徴とする請求項1に記載の移動装置。
【請求項3】
前記印加制御部は、前記第1交流電圧の振幅が定常状態における振幅の半分となった時に、前記第2交流電圧の印加を開始することを特徴とする請求項2に記載の移動装置。
【請求項4】
前記圧電体振動子は、前記被駆動体によって付勢され、
前記第2交流電圧の印加開始タイミングは、前記第1交流電圧の印加開始から、前記第1交流電圧の印加によって励起される前記伸縮モード振動によって、前記圧電体振動子が前記被駆動体を押す力が、前記付勢される力を上回る時点までの時間に対応することを特徴とする請求項1に記載の移動装置。
【請求項1】
圧電体振動子と、
前記圧電体振動子に対して、伸縮モード振動を励起する第1交流電圧、及び屈曲モード振動を励起する第2交流電圧を印加する回路部とを備え、
前記回路部は、前記圧電体振動子の前記伸縮モード振動と前記屈曲モード振動に基づく楕円運動によって被駆動体を移動させるために、前記第1交流電圧を印加した後であって、前記第1交流電圧の振幅が定常状態になる時点までの間に、前記第2交流電圧の印加を開始することを特徴とする移動装置。
【請求項2】
前記回路部は、前記第1交流電圧の振幅を検出する検出部と、前記振幅が一定値以上の場合に、前記第2交流電圧の印加を開始する印加制御部とを有することを特徴とする請求項1に記載の移動装置。
【請求項3】
前記印加制御部は、前記第1交流電圧の振幅が定常状態における振幅の半分となった時に、前記第2交流電圧の印加を開始することを特徴とする請求項2に記載の移動装置。
【請求項4】
前記圧電体振動子は、前記被駆動体によって付勢され、
前記第2交流電圧の印加開始タイミングは、前記第1交流電圧の印加開始から、前記第1交流電圧の印加によって励起される前記伸縮モード振動によって、前記圧電体振動子が前記被駆動体を押す力が、前記付勢される力を上回る時点までの時間に対応することを特徴とする請求項1に記載の移動装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2008−167573(P2008−167573A)
【公開日】平成20年7月17日(2008.7.17)
【国際特許分類】
【出願番号】特願2006−353786(P2006−353786)
【出願日】平成18年12月28日(2006.12.28)
【出願人】(000000527)ペンタックス株式会社 (1,878)
【Fターム(参考)】
【公開日】平成20年7月17日(2008.7.17)
【国際特許分類】
【出願日】平成18年12月28日(2006.12.28)
【出願人】(000000527)ペンタックス株式会社 (1,878)
【Fターム(参考)】
[ Back to top ]