
コンテナ組立装置
【課題】コンテナの破損を防止しつつ組立処理能力の向上を図ることができるコンテナ組立装置を提供する。
【解決手段】コンテナ組立装置1は、コンテナ2の上枠12を持ち上げる持上手段と、コンテナ2の回動側板13を押圧回動させる押圧回動手段32とを備える。押圧回動手段32は、上昇位置と下降位置との間で昇降する昇降体51を有する。押圧回動手段32は、昇降体51が下降位置に位置した状態時に昇降体51に対して可動する可動体52を有する。可動体52の先端部には、コンテナ2の底板11に接触することなく、コンテナ2の回動側板13を組立姿勢になるまで押圧回動させるローラ体53を設ける。
【解決手段】コンテナ組立装置1は、コンテナ2の上枠12を持ち上げる持上手段と、コンテナ2の回動側板13を押圧回動させる押圧回動手段32とを備える。押圧回動手段32は、上昇位置と下降位置との間で昇降する昇降体51を有する。押圧回動手段32は、昇降体51が下降位置に位置した状態時に昇降体51に対して可動する可動体52を有する。可動体52の先端部には、コンテナ2の底板11に接触することなく、コンテナ2の回動側板13を組立姿勢になるまで押圧回動させるローラ体53を設ける。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、折畳可能なコンテナを折畳状態から組立状態にするコンテナ組立装置に関するものである。
【背景技術】
【0002】
従来、例えば特許文献1に記載されたコンテナ組立装置が知られている。
【0003】
この従来のコンテナ組立装置は、コンテナの上枠を持ち上げる持上手段と、コンテナの回動側板を押圧回動させる押圧回動手段とを備えている。また、押圧回動手段は、フレームに固定された固定体と、この固定体に回動可能に設けられた回動アーム体と、この回動アーム体の先端部に回転可能に設けられコンテナの回動側板を組立姿勢になるまで押圧回動させるローラ体とを有している。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】実公平5−20646号公報(第8図A〜C)
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記従来のコンテナ組立装置では、押圧回動手段のローラ体がコンテナの底板に接触するため、組立処理能力を上げると、コンテナの底板にローラ体から過大な力が作用し、コンテナが破損するおそれがある。
【0006】
本発明は、このような点に鑑みなされたもので、コンテナの破損を防止しつつ、組立処理能力の向上を図ることができるコンテナ組立装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
請求項1記載のコンテナ組立装置は、底板、上枠およびこの上枠に対して回動可能な回動側板を有する折畳可能なコンテナを折畳状態から組立状態にするコンテナ組立装置であって、コンテナの上枠を持ち上げる持上手段と、コンテナの回動側板を押圧回動させる押圧回動手段とを備え、前記押圧回動手段は、上昇位置と下降位置との間で昇降する昇降体と、この昇降体とともに昇降し、前記昇降体が下降位置に位置した状態時に前記昇降体に対して可動する可動体と、この可動体に設けられ、コンテナの底板に接触することなくコンテナの回動側板を組立姿勢になるまで押圧回動させる押圧回動体とを有するものである。
【0008】
請求項2記載のコンテナ組立装置は、請求項1記載のコンテナ組立装置において、押圧回動手段は、昇降体との当接によりこの昇降体を下降位置に停止させるストッパ体を有するものである。
【0009】
請求項3記載のコンテナ組立装置は、請求項1または2記載のコンテナ組立装置において、押圧回動手段は、押圧回動体による押圧回動に先立ってコンテナの回動側板を押圧回動させる追加押圧回動体を有するものである。
【0010】
請求項4記載のコンテナ組立装置は、請求項1ないし3のいずれか一記載のコンテナ組立装置において、押圧回動体は、可動体に回転可能に設けられたローラ体であるものである。
【発明の効果】
【0011】
本発明によれば、押圧回動手段は、上昇位置と下降位置との間で昇降する昇降体と、この昇降体とともに昇降し昇降体が下降位置に位置した状態時に昇降体に対して可動する可動体と、この可動体に設けられコンテナの底板に接触することなくコンテナの回動側板を組立姿勢になるまで押圧回動させる押圧回動体とを有するため、コンテナの破損を防止しつつ、組立処理能力の向上を図ることができる。
【図面の簡単な説明】
【0012】
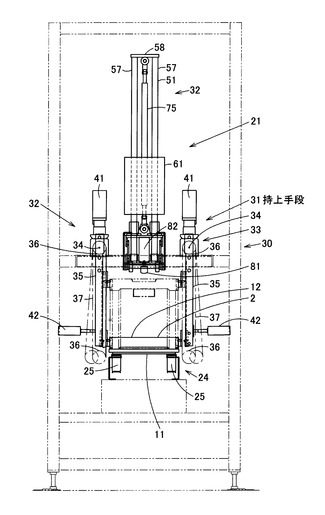
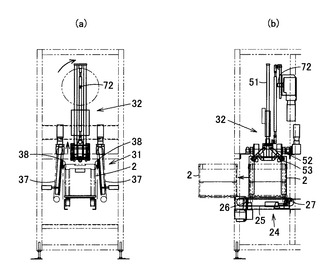
【図1】本発明の一実施の形態に係るコンテナ組立装置の側面図である。
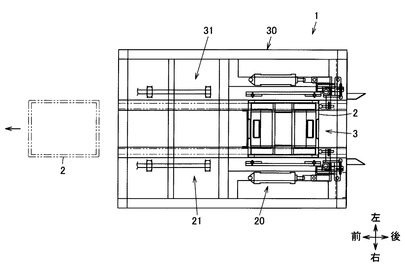
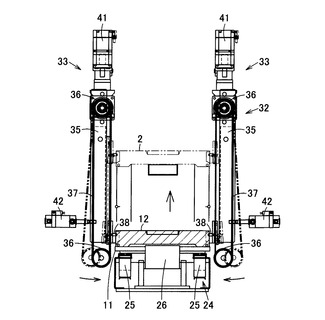
【図2】同上コンテナ組立装置の概略平面図である。
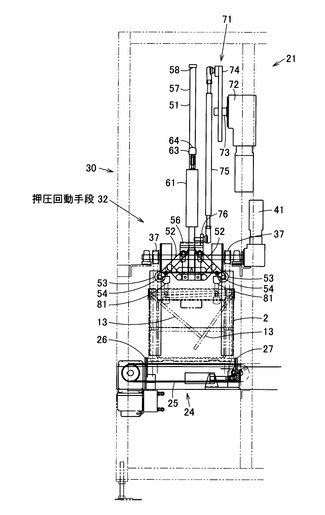
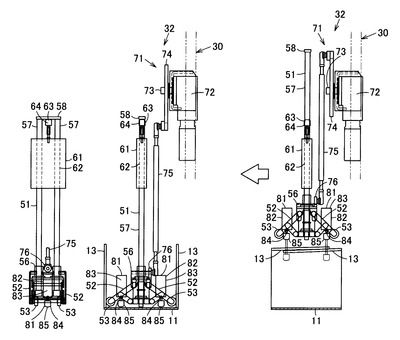
【図3】同上コンテナ組立装置の押圧回動手段(ハンド部)の側面図である。
【図4】同上コンテナ組立装置の持上手段(リフト部)の前面図である。
【図5】同上持上手段の前面図である。
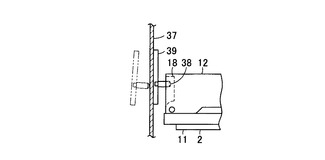
【図6】同上持上手段のピン部がコンテナの凹部内に挿入された状態を示す図である。
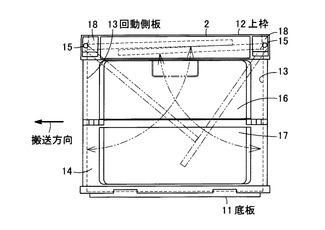
【図7】組立状態のコンテナの側面図である。
【図8】同上コンテナ組立装置の動作説明図である。
【図9】図8に続く動作説明図である。
【図10】図9に続く動作説明図である。
【図11】図10に続く動作説明図である。
【図12】図11続く動作説明図である。
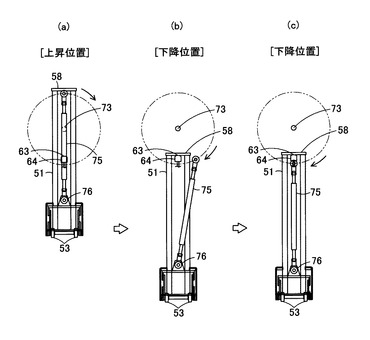
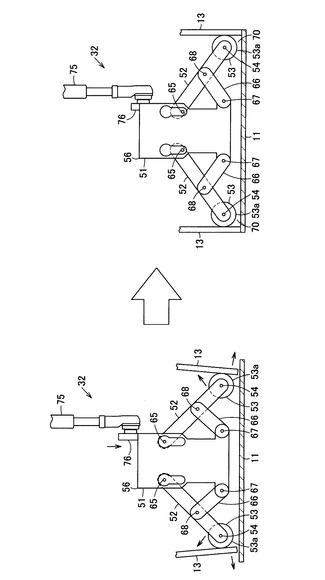
【図13】同上押圧回動手段の動作説明図である。
【図14】同上押圧回動手段の動作説明図である。
【図15】同上押圧回動手段の動作説明図である。
【図16】本発明の他の実施の形態に係るコンテナ組立装置を示す図である。
【図17】小さめのコンテナの側面図である。
【発明を実施するための形態】
【0013】
本発明の一実施の形態について図面を参照して説明する。
【0014】
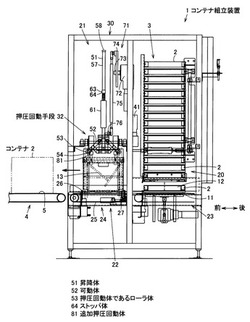
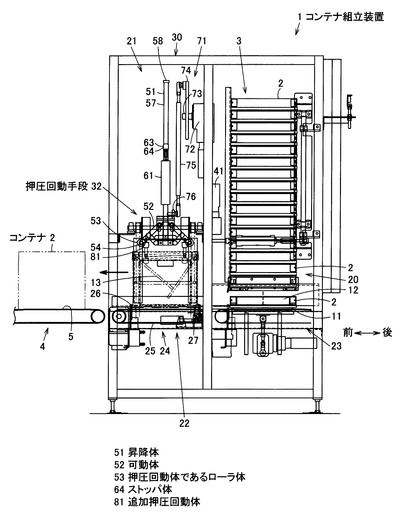
図1および図2において、1はコンテナ組立装置で、このコンテナ組立装置1は、折畳可能なコンテナ2を平板状の折畳状態から直方体状で箱状の組立状態にするものである。
【0015】
つまり、コンテナ組立装置1は、収納空間部3に段積みされて収納された複数個の折畳状態のコンテナ2を収納空間部3から1個ずつ取り出して組立状態にした後、この組立状態にされたコンテナ2を搬送方向である前方に搬送して搬送装置4の搬送面5上に供給するコンテナ自動組立設備である。
【0016】
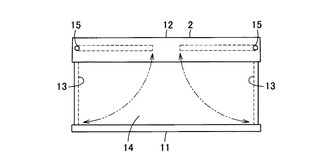
コンテナ2は、図7等に示されるように、搬送方向に沿った前後方向にやや長手状をなす矩形板状の底板11と、矩形環状の上枠12と、コンテナ2の組立状態時に底板11と上枠12との間に鉛直状の組立姿勢で位置する矩形板状の4つの側板、つまり互いに対向する前後1対の回動側板13および互いに対向する左右1対の折曲側板14とを有している。
【0017】
前側の回動側板(回動板部)13の上端部が上枠12の前端部に左右方向の軸15を介して回動可能に取り付けられ、後側の回動側板13の上端部が上枠12の後端部に左右方向の軸15を介して回動可能に取り付けられている。つまり、回動側板13は、上枠12に対して軸15を中心として上下方向に回動可能となっている。そして、回動側板13は、コンテナ2の組立状態時には鉛直状の組立姿勢になって底板11および上枠12間に位置し、コンテナ2の折畳状態時には水平状の折畳姿勢になって上枠12の内側に位置する。
【0018】
なお、例えば回動側板13は、組立姿勢になった際に、図示しない固定手段(互いに係合する係合爪および係合凹部等)によって、底板11に対して解除可能に固定される。また、この図7のコンテナ2は、例えば大きめのものであり、折畳状態時には、前側の回動側板13と後側の回動側板13とが平面視で互いに重なり合う。
【0019】
左右の各折曲側板14は、上下方向中央部で折曲可能なもので、ヒンジを介して互いに回動可能に連結された上部側板部16および下部側板部17を有しており、上部側板部16の上端部が上枠12に前後方向の軸を介して回動可能に取り付けられ、下部側板部17の下端部が底板11に前後方向の軸を介して回動可能に取り付けられている。上枠12の側面の前後部には、ピン引掛部である凹部18が形成されている(図6参照)。
【0020】
コンテナ組立装置1は、図1および図2に示されるように、収納空間部3にコンテナ2を収納し組立処理の際に収納空間部3から折畳状態のコンテナ2を1個ずつ取り出す段ばらし部であるコンテナ取出部20と、コンテナ2を1個ずつ組み立てて折畳状態から組立状態にするコンテナ組立部21と、コンテナ2を前方に向けて搬送するコンテナ搬送部22とを備えている。
【0021】
コンテナ搬送部22は、収納空間部3から取り出された折畳状態のコンテナ2を前方に向けて搬送する取出側コンベヤ23と、この取出側コンベヤ23からの折畳状態のコンテナ2を受け入れかつコンテナ組立部21によって組み立てられた組立状態のコンテナ2を前方に向けて搬送して搬送装置4の搬送面5上に供給する組立側コンベヤ24とを備えている。
【0022】
組立側コンベヤ24は、コンテナ2を上面に載せて搬送する無端状の左右1対の搬送ベルト25を有している。組立側コンベヤ24は、コンテナ2の底板11の前面に対して進退可能で底板11の前面との当接によりこの底板11の前面を所定位置に停止させる板状の前面ストッパ26と、コンテナ2の底板11の後面に対して進退可能で底板11の後面との当接によりこの底板11の後面を所定位置に停止させる板状の後面ストッパ27とを有している。そして、コンテナ2の底板11は、前面ストッパ26および後面ストッパ27にて前後から挟持されて所定位置に固定される。
【0023】
コンテナ組立部21は、図1ないし図6等に示されるように、コンテナ2の上枠12を所定位置まで持ち上げて底板11から離す持上手段(リフト部)31と、コンテナ2の前後1対の回動側板13を上枠12に対して組立姿勢になるまで下方に押圧回動させる押圧回動手段(ハンド部)32とを備えている。
【0024】
持上手段31は、コンテナ2の上枠12を左右から挟持して所定位置まで持ち上げることにより、組立側コンベヤ24のストッパ26,27にて固定された底板11から上枠12を上方へ離すとともに左右1対の折曲側板14を展開する左右対をなす例えば4つの持上部33を有している。
【0025】
各持上部33は、固定機枠30に対して前後方向の軸34を中心として作用位置と非作用位置との間で回動する回動フレーム35を有し、この回動フレーム35の上下端部にはプーリ36が回転可能に取り付けられ、これら上下のプーリ36には無端状のタイミングベルト37が回行可能に掛け渡されている。タイミングベルト37には、回動フレーム35が作用位置に位置した際にはコンテナ2の上枠12の凹部18に入り、回動フレーム35が非作用位置に位置した際にコンテナ2の上枠12の凹部18から出る突出部であるピン38が取付部材39を介して取り付けられている。
【0026】
また、各持上部33は、プーリ36を回動フレーム35に対して回転させてタイミングベルト37を所定方向に回行させるモータ等のベルト用駆動手段41と、回動フレーム35を固定機枠30に対して作用位置と非作用位置との間で回動させるエアシリンダ等のフレーム用駆動手段42とを有している。
【0027】
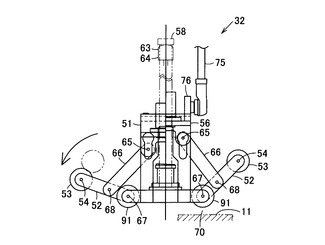
押圧回動手段32は、図13ないし図15等にも示されるように、固定機枠30に対して上昇位置と下降位置との間で昇降する昇降フレーム等の昇降体51と、この昇降体51とともに昇降し昇降体51が下降位置に位置した状態時に昇降体51に対して可動する前後対をなす可動体52とを有している。
【0028】
また、押圧回動手段32は、各可動体52の先端部に左右方向の軸54を中心として回転可能に設けられコンテナ2の底板11に接触することなくコンテナ2の回動側板13を上枠12に対して組立姿勢になるまで下方に押圧回動させる複数の押圧回動体であるローラ体53を有している。すなわち例えば、前後の各可動体52の先端部(下端部)に、ローラ体53が2個ずつ回転可能に取り付けられている。なお、ローラ体53のうち少なくともコンテナ2の回動側板13と接触する外周面部は、例えばゴム或いは合成樹脂等の弾性変形可能な緩衝部材にて形成されている。
【0029】
ここで、昇降体51は、コンテナ2に向かって下降してコンテナ2内に挿入される昇降本体部56を有し、この昇降本体部56から例えば左右1対で2本のロッド部57が上方に向かって突出している。ロッド部57は、固定機枠30に固定された固定ガイド体61のガイド孔部62にスライド可能に嵌合挿通されている。また、ロッド部57の上端部には、昇降体51が下降位置に位置した状態時に固定ガイド体61の当接受部63と当接する当接部58が固設されている。固定ガイド体61の当接受部63は、例えばゴム或いは合成樹脂等の弾性変形可能な緩衝部材にて形成されている。なお、この当接受部63にて、昇降体51の当接部58との当接によりこの昇降体51を予め設定された所定の下降位置に停止させるストッパ体(当て止め)64が構成されている。
【0030】
可動体52の基端部(上端部)は、図15等に示すように、昇降本体部56に対して昇降可能な左右方向の昇降軸65を介して昇降本体部56に昇降可能に取り付けられている。そして、可動体52は、昇降本体部56に対して昇降軸65を中心として上下方向に回動可能となっている。また、一端部(下端部)が昇降本体部56の下端部に左右方向の軸67を中心として回動可能に連結された支持アーム体66の他端部(上端部)が、可動体52の長手方向中間部に左右方向の軸68を中心として回動可能に連結されている。なお、昇降本体部56には、昇降軸65を上下方向に沿って案内する案内部(図示しない)が設けられている。
【0031】
そして、可動体52は、当接部58と当接受部63との当接により昇降体51が下降位置に位置した状態時において、基端部が昇降軸65とともに少し下降しつつ、全体が昇降軸65を中心として昇降体51に対して上方に回動する。
【0032】
このとき、ローラ体53が、コンテナ2の底板11に接触することなく、コンテナ2の回動側板13を上枠12に対して組立姿勢になるまで下方に押圧回動させる。つまりこのとき、ローラ体53の外周面53aは、コンテナ2の底板11の上面に接触することなく、底板11の上方近傍位置でコンテナ2の回動側板13の内面を押圧して組立姿勢になるまで回動させる。なお、ローラ体53が最も底板11に接近した状態時において、ローラ体53の外周面53aの下端とコンテナ2の底板11の上面との間には、所定距離の間隙70が存在する(図15参照)。
【0033】
また、押圧回動手段32は、昇降体51を固定機枠30に対して上昇位置と下降位置との間で昇降させるとともに、昇降体51が下降位置に位置した状態時に可動体52を昇降体51に対して可動させる駆動部71を有している。
【0034】
駆動部71は、固定機枠30に固定されたモータ等の駆動源72を有し、この駆動源72から前後方向の回転駆動軸73が前方に向かって突出し、この回転駆動軸73にはこの回転駆動軸73とともに回転する回転部材である回転アーム74が固着されている。また、回転アーム74の一端部には連結ロッド75の上端部が回動可能に連結され、この連結ロッド75の下端部が連結部材76に回動可能に連結され、この連結部材76に可動体52の昇降軸65が取り付けられている。連結部材76は、昇降体51の昇降本体部56に昇降可能に設けられている。
【0035】
さらに、押圧回動手段32は、ローラ体53による押圧回動に先立って、コンテナ2の回動側板13を予め少しだけ下方に押圧回動させる追加押圧回動体81を有している。
【0036】
追加押圧回動体81は、例えば伸び動作によりコンテナ2の両回動側板13を下方に押圧回動させる前後1対のエアシリンダ等のシリンダ82にて構成されている。シリンダ82は、昇降体51の昇降本体部56に対して固定されたシリンダ本体83と、このシリンダ本体83内に対して出入りして下降および上昇する昇降可能なロッド84とを有している。また、ロッド84の下端部には、コンテナ2の回動側板13と接触する例えばゴム或いは合成樹脂等の弾性変形可能な緩衝部材85が装着されている。なお、緩衝部材85は、コンテナ2の底板11とは接触しないようになっている。つまり、昇降体51が下降位置に位置して追加押圧回動体81が最も底板11に接近した状態時において、緩衝部材85の下端とコンテナ2の底板11の上面との間には所定距離の間隙(図示せず)が存在する。
【0037】
次に、コンテナ組立装置1の動作等を図面を参照して説明する。
【0038】
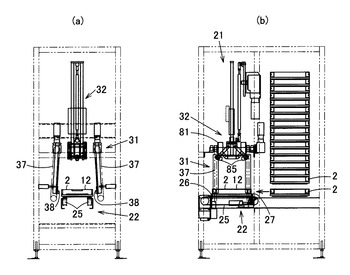
図8(a)および(b)に示すように、折畳状態のコンテナ2が、コンテナ取出部20にて段ばらしされ、コンテナ搬送部22にて所定位置まで搬送されると、コンテナ2の底板11が、両ストッパ26,27にて前後から挟持されてその所定位置に固定される。
【0039】
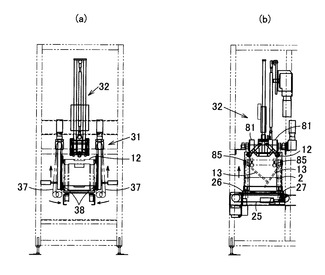
次いで、図9(a)および(b)に示すように、コンテナ2の上枠12が、持上手段31のピン38にて左右から挟持されて所定位置まで持ち上げられ、両ストッパ26,27で固定した底板11から上方へ離れる。
【0040】
また、コンテナ2の上枠12が所定位置まで持ち上げられることにより、折り曲げられていた左右1対の折曲側板14が展開して鉛直面に沿った平板状の組立姿勢になる。なお、コンテナ2の上枠12は、コンテナ2が組立状態になるまで、持上手段31のピン38にて左右から挟持された状態のまま、底板11から上方に離れた所定位置に固定されている。
【0041】
その後、互いに重なり合った前後1対の回動側板13が、追加押圧回動体81のシリンダ82にて落される。つまり、シリンダ82が伸び動作してロッド84が所定位置まで下降することにより、緩衝部材85が回動側板13に接触(当接)してこの回動側板13を上枠12に対して下方に押圧回動させる。なお、シリンダ82は、伸び動作した後、直ぐに縮み動作して元の待機状態に戻る。
【0042】
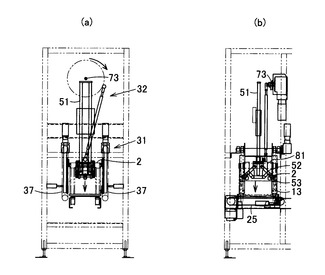
次いで、図10(a)および(b)に示すように、押圧回動手段32の昇降体51が下降し、可動体52およびローラ体53がコンテナ2内に挿入される。
【0043】
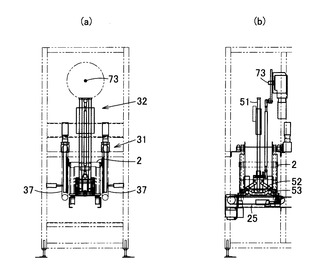
そして、図11(a)および(b)に示すように、昇降体51が予め設定された下降位置まで下降した後に、可動体52が基端部の昇降軸65を中心として上方に回動し、その結果、ローラ体53が、コンテナ2の底板11に接触することなく、コンテナ2の回動側板13を上枠12に対して組立姿勢になるまで下方に押圧回動させる。こうして、前後1対の回動側板13が組立姿勢となって底板11に対して固定され、コンテナ2が組立状態となる。
【0044】
この組立状態となったコンテナ2は、図12(a)および(b)に示すように、昇降体51が予め設定された上限位置まで上昇し、ストッパ26,27による底板11の挟持固定とピン38による上枠12の挟持固定とが解除された後、組立側コンベヤ24の搬送ベルト25にて搬送されて搬送装置4の搬送面5上に供給される。
【0045】
ここで、図13および図14に示すように、押圧回動手段32の駆動部71の回転アーム74が回転駆動軸73とともに1回転、つまり360度回転する間に、昇降体51は、上昇位置から下降位置まで下降した後、その下降位置からその上昇位置まで上昇する。
【0046】
図14(a)に示すように、昇降体51が上昇位置に位置した状態では、連結ロッド75の上端部が回転駆動軸73よりも上方側に位置し、昇降体51の当接部58が固定ガイド体61の当接受部63から上方に離れている。
【0047】
そして、図14(b)に示すように、回転アーム74が基準位置から例えば150度回転した時点で、昇降体51の当接部58が固定ガイド体61の当接受部63に当接し、この当接により昇降体51の下降が規制されて昇降体51が下降位置に停止する。
【0048】
その後、図14(c)に示すように、回転アーム74がさらに例えば30度回転する間に、連結ロッド75が連結部材76を所定量だけ押し下げる。つまり、連結ロッド75の下動に基づいて昇降軸65が所定量だけ下降する。
【0049】
すると、図15に示すように、前後対をなす可動体52は、先端側のローラ体53が互いに離れる方向に移動するように、昇降軸65を中心として昇降体51に対して上方に回動する。
【0050】
このとき、ローラ体53は、コンテナ2の底板11の上面に接触することなく、コンテナ2の回動側板13を上枠12に対して組立姿勢になるまで下方に押圧回動させる。つまり、前側のローラ体53が前側の回動側板13を前方へ押圧して組立姿勢になるまで回動させかつ後側のローラ体53が後側の回動側板13を後方へ押圧して組立姿勢になるまで回動させる。
【0051】
なおその後、回転アーム74がさらに例えば30度回転すると、連結ロッド75が連結部材76を所定量だけ引き上げるため、ローラ体53が下方に回動して組立姿勢の回動側板13から離れる。続いて、回転アーム74が元の基準位置まで回転すると、昇降体51が上昇位置まで上昇する。
【0052】
そして、このようなコンテナ組立装置1によれば、押圧回動手段32は、上昇位置と下降位置との間で昇降する昇降体51と、この昇降体51とともに昇降し昇降体51が下降位置に位置した状態時に昇降体51に対して先端側が回動側板13側に接近するように可動する可動体52と、この可動体52に設けられコンテナ2の底板11に接触することなく前後の回動側板13を組立姿勢になるまで押圧回動させるローラ体53とを有するため、コンテナ2の破損を防止しつつ、組立処理能力の向上を図ることができ、しかも、コンテナ2の組立処理時に発生する騒音および振動等を抑制できる。
【0053】
また、押圧回動手段32は昇降体51の当接部58との当接によりこの昇降体51を下降位置に停止させるストッパ体64を有するため、ストッパ体64にて昇降体51を下降位置に適切に停止させることができ、また駆動部71の作動によって可動体52を昇降体51に対して可動させることができる。
【0054】
さらに、押圧回動手段32はローラ体53による押圧回動に先立ってコンテナ2の回動側板13を上枠12に対して押圧回動させる追加押圧回動体81を有するため、互いに重なり合った前後の回動側板13同士の引っ掛かりを防止でき、大きめのコンテナ2にも適切に対応可能であり、コンテナ2の破損を効果的に防止でき、また押圧回動手段32の大きさを小型化できる。
【0055】
なお、コンテナ組立装置1の押圧回動手段32は、例えば図16に示すものであっても、同様の作用効果を奏することができる。
【0056】
この図16に示すものでは、可動体52の基端部(下端部)が昇降体51の昇降本体部56の下端部に軸67を中心として回動可能に連結され、可動体52の先端部(上端部)にローラ体53が軸54を中心として回転可能に取り付けられている。また、可動体52の基端部には、コンテナ2の回動側板13を上枠12に対して押圧回動させる補助ローラ体91が軸67を中心として回転可能に取り付けられている。なお、昇降体51が下降位置に位置した状態時において補助ローラ体91の外周面の下端とコンテナ2の底板11の上面との間には、所定距離の間隙70が存在する。さらに、支持アーム体66の一端部(上端部)が昇降軸65を介して昇降本体部56に昇降可能に取り付けられ、支持アーム体66の他端部(下端部)が可動体52の長手方向中間部に軸68を中心として回動可能に連結されている。
【0057】
また、コンテナ2は、その種類等によって大きさも異なり、例えば図17に示すような高さ寸法が低い小さめのコンテナ2であれば、追加押圧回動体81を作動させる必要がなく、また追加押圧回動体81を設けなくてもよい。
【0058】
さらに、例えば可動体52は、昇降体51に対して上下方向に回動するものには限定されず、例えば昇降体51に対して前後方向に移動するもの等でもよい。
【符号の説明】
【0059】
1 コンテナ組立装置
2 コンテナ
11 底板
12 上枠
13 回動側板
31 持上手段
32 押圧回動手段
51 昇降体
52 可動体
53 押圧回動体であるローラ体
64 ストッパ体
81 追加押圧回動体
【技術分野】
【0001】
本発明は、折畳可能なコンテナを折畳状態から組立状態にするコンテナ組立装置に関するものである。
【背景技術】
【0002】
従来、例えば特許文献1に記載されたコンテナ組立装置が知られている。
【0003】
この従来のコンテナ組立装置は、コンテナの上枠を持ち上げる持上手段と、コンテナの回動側板を押圧回動させる押圧回動手段とを備えている。また、押圧回動手段は、フレームに固定された固定体と、この固定体に回動可能に設けられた回動アーム体と、この回動アーム体の先端部に回転可能に設けられコンテナの回動側板を組立姿勢になるまで押圧回動させるローラ体とを有している。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】実公平5−20646号公報(第8図A〜C)
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記従来のコンテナ組立装置では、押圧回動手段のローラ体がコンテナの底板に接触するため、組立処理能力を上げると、コンテナの底板にローラ体から過大な力が作用し、コンテナが破損するおそれがある。
【0006】
本発明は、このような点に鑑みなされたもので、コンテナの破損を防止しつつ、組立処理能力の向上を図ることができるコンテナ組立装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
請求項1記載のコンテナ組立装置は、底板、上枠およびこの上枠に対して回動可能な回動側板を有する折畳可能なコンテナを折畳状態から組立状態にするコンテナ組立装置であって、コンテナの上枠を持ち上げる持上手段と、コンテナの回動側板を押圧回動させる押圧回動手段とを備え、前記押圧回動手段は、上昇位置と下降位置との間で昇降する昇降体と、この昇降体とともに昇降し、前記昇降体が下降位置に位置した状態時に前記昇降体に対して可動する可動体と、この可動体に設けられ、コンテナの底板に接触することなくコンテナの回動側板を組立姿勢になるまで押圧回動させる押圧回動体とを有するものである。
【0008】
請求項2記載のコンテナ組立装置は、請求項1記載のコンテナ組立装置において、押圧回動手段は、昇降体との当接によりこの昇降体を下降位置に停止させるストッパ体を有するものである。
【0009】
請求項3記載のコンテナ組立装置は、請求項1または2記載のコンテナ組立装置において、押圧回動手段は、押圧回動体による押圧回動に先立ってコンテナの回動側板を押圧回動させる追加押圧回動体を有するものである。
【0010】
請求項4記載のコンテナ組立装置は、請求項1ないし3のいずれか一記載のコンテナ組立装置において、押圧回動体は、可動体に回転可能に設けられたローラ体であるものである。
【発明の効果】
【0011】
本発明によれば、押圧回動手段は、上昇位置と下降位置との間で昇降する昇降体と、この昇降体とともに昇降し昇降体が下降位置に位置した状態時に昇降体に対して可動する可動体と、この可動体に設けられコンテナの底板に接触することなくコンテナの回動側板を組立姿勢になるまで押圧回動させる押圧回動体とを有するため、コンテナの破損を防止しつつ、組立処理能力の向上を図ることができる。
【図面の簡単な説明】
【0012】
【図1】本発明の一実施の形態に係るコンテナ組立装置の側面図である。
【図2】同上コンテナ組立装置の概略平面図である。
【図3】同上コンテナ組立装置の押圧回動手段(ハンド部)の側面図である。
【図4】同上コンテナ組立装置の持上手段(リフト部)の前面図である。
【図5】同上持上手段の前面図である。
【図6】同上持上手段のピン部がコンテナの凹部内に挿入された状態を示す図である。
【図7】組立状態のコンテナの側面図である。
【図8】同上コンテナ組立装置の動作説明図である。
【図9】図8に続く動作説明図である。
【図10】図9に続く動作説明図である。
【図11】図10に続く動作説明図である。
【図12】図11続く動作説明図である。
【図13】同上押圧回動手段の動作説明図である。
【図14】同上押圧回動手段の動作説明図である。
【図15】同上押圧回動手段の動作説明図である。
【図16】本発明の他の実施の形態に係るコンテナ組立装置を示す図である。
【図17】小さめのコンテナの側面図である。
【発明を実施するための形態】
【0013】
本発明の一実施の形態について図面を参照して説明する。
【0014】
図1および図2において、1はコンテナ組立装置で、このコンテナ組立装置1は、折畳可能なコンテナ2を平板状の折畳状態から直方体状で箱状の組立状態にするものである。
【0015】
つまり、コンテナ組立装置1は、収納空間部3に段積みされて収納された複数個の折畳状態のコンテナ2を収納空間部3から1個ずつ取り出して組立状態にした後、この組立状態にされたコンテナ2を搬送方向である前方に搬送して搬送装置4の搬送面5上に供給するコンテナ自動組立設備である。
【0016】
コンテナ2は、図7等に示されるように、搬送方向に沿った前後方向にやや長手状をなす矩形板状の底板11と、矩形環状の上枠12と、コンテナ2の組立状態時に底板11と上枠12との間に鉛直状の組立姿勢で位置する矩形板状の4つの側板、つまり互いに対向する前後1対の回動側板13および互いに対向する左右1対の折曲側板14とを有している。
【0017】
前側の回動側板(回動板部)13の上端部が上枠12の前端部に左右方向の軸15を介して回動可能に取り付けられ、後側の回動側板13の上端部が上枠12の後端部に左右方向の軸15を介して回動可能に取り付けられている。つまり、回動側板13は、上枠12に対して軸15を中心として上下方向に回動可能となっている。そして、回動側板13は、コンテナ2の組立状態時には鉛直状の組立姿勢になって底板11および上枠12間に位置し、コンテナ2の折畳状態時には水平状の折畳姿勢になって上枠12の内側に位置する。
【0018】
なお、例えば回動側板13は、組立姿勢になった際に、図示しない固定手段(互いに係合する係合爪および係合凹部等)によって、底板11に対して解除可能に固定される。また、この図7のコンテナ2は、例えば大きめのものであり、折畳状態時には、前側の回動側板13と後側の回動側板13とが平面視で互いに重なり合う。
【0019】
左右の各折曲側板14は、上下方向中央部で折曲可能なもので、ヒンジを介して互いに回動可能に連結された上部側板部16および下部側板部17を有しており、上部側板部16の上端部が上枠12に前後方向の軸を介して回動可能に取り付けられ、下部側板部17の下端部が底板11に前後方向の軸を介して回動可能に取り付けられている。上枠12の側面の前後部には、ピン引掛部である凹部18が形成されている(図6参照)。
【0020】
コンテナ組立装置1は、図1および図2に示されるように、収納空間部3にコンテナ2を収納し組立処理の際に収納空間部3から折畳状態のコンテナ2を1個ずつ取り出す段ばらし部であるコンテナ取出部20と、コンテナ2を1個ずつ組み立てて折畳状態から組立状態にするコンテナ組立部21と、コンテナ2を前方に向けて搬送するコンテナ搬送部22とを備えている。
【0021】
コンテナ搬送部22は、収納空間部3から取り出された折畳状態のコンテナ2を前方に向けて搬送する取出側コンベヤ23と、この取出側コンベヤ23からの折畳状態のコンテナ2を受け入れかつコンテナ組立部21によって組み立てられた組立状態のコンテナ2を前方に向けて搬送して搬送装置4の搬送面5上に供給する組立側コンベヤ24とを備えている。
【0022】
組立側コンベヤ24は、コンテナ2を上面に載せて搬送する無端状の左右1対の搬送ベルト25を有している。組立側コンベヤ24は、コンテナ2の底板11の前面に対して進退可能で底板11の前面との当接によりこの底板11の前面を所定位置に停止させる板状の前面ストッパ26と、コンテナ2の底板11の後面に対して進退可能で底板11の後面との当接によりこの底板11の後面を所定位置に停止させる板状の後面ストッパ27とを有している。そして、コンテナ2の底板11は、前面ストッパ26および後面ストッパ27にて前後から挟持されて所定位置に固定される。
【0023】
コンテナ組立部21は、図1ないし図6等に示されるように、コンテナ2の上枠12を所定位置まで持ち上げて底板11から離す持上手段(リフト部)31と、コンテナ2の前後1対の回動側板13を上枠12に対して組立姿勢になるまで下方に押圧回動させる押圧回動手段(ハンド部)32とを備えている。
【0024】
持上手段31は、コンテナ2の上枠12を左右から挟持して所定位置まで持ち上げることにより、組立側コンベヤ24のストッパ26,27にて固定された底板11から上枠12を上方へ離すとともに左右1対の折曲側板14を展開する左右対をなす例えば4つの持上部33を有している。
【0025】
各持上部33は、固定機枠30に対して前後方向の軸34を中心として作用位置と非作用位置との間で回動する回動フレーム35を有し、この回動フレーム35の上下端部にはプーリ36が回転可能に取り付けられ、これら上下のプーリ36には無端状のタイミングベルト37が回行可能に掛け渡されている。タイミングベルト37には、回動フレーム35が作用位置に位置した際にはコンテナ2の上枠12の凹部18に入り、回動フレーム35が非作用位置に位置した際にコンテナ2の上枠12の凹部18から出る突出部であるピン38が取付部材39を介して取り付けられている。
【0026】
また、各持上部33は、プーリ36を回動フレーム35に対して回転させてタイミングベルト37を所定方向に回行させるモータ等のベルト用駆動手段41と、回動フレーム35を固定機枠30に対して作用位置と非作用位置との間で回動させるエアシリンダ等のフレーム用駆動手段42とを有している。
【0027】
押圧回動手段32は、図13ないし図15等にも示されるように、固定機枠30に対して上昇位置と下降位置との間で昇降する昇降フレーム等の昇降体51と、この昇降体51とともに昇降し昇降体51が下降位置に位置した状態時に昇降体51に対して可動する前後対をなす可動体52とを有している。
【0028】
また、押圧回動手段32は、各可動体52の先端部に左右方向の軸54を中心として回転可能に設けられコンテナ2の底板11に接触することなくコンテナ2の回動側板13を上枠12に対して組立姿勢になるまで下方に押圧回動させる複数の押圧回動体であるローラ体53を有している。すなわち例えば、前後の各可動体52の先端部(下端部)に、ローラ体53が2個ずつ回転可能に取り付けられている。なお、ローラ体53のうち少なくともコンテナ2の回動側板13と接触する外周面部は、例えばゴム或いは合成樹脂等の弾性変形可能な緩衝部材にて形成されている。
【0029】
ここで、昇降体51は、コンテナ2に向かって下降してコンテナ2内に挿入される昇降本体部56を有し、この昇降本体部56から例えば左右1対で2本のロッド部57が上方に向かって突出している。ロッド部57は、固定機枠30に固定された固定ガイド体61のガイド孔部62にスライド可能に嵌合挿通されている。また、ロッド部57の上端部には、昇降体51が下降位置に位置した状態時に固定ガイド体61の当接受部63と当接する当接部58が固設されている。固定ガイド体61の当接受部63は、例えばゴム或いは合成樹脂等の弾性変形可能な緩衝部材にて形成されている。なお、この当接受部63にて、昇降体51の当接部58との当接によりこの昇降体51を予め設定された所定の下降位置に停止させるストッパ体(当て止め)64が構成されている。
【0030】
可動体52の基端部(上端部)は、図15等に示すように、昇降本体部56に対して昇降可能な左右方向の昇降軸65を介して昇降本体部56に昇降可能に取り付けられている。そして、可動体52は、昇降本体部56に対して昇降軸65を中心として上下方向に回動可能となっている。また、一端部(下端部)が昇降本体部56の下端部に左右方向の軸67を中心として回動可能に連結された支持アーム体66の他端部(上端部)が、可動体52の長手方向中間部に左右方向の軸68を中心として回動可能に連結されている。なお、昇降本体部56には、昇降軸65を上下方向に沿って案内する案内部(図示しない)が設けられている。
【0031】
そして、可動体52は、当接部58と当接受部63との当接により昇降体51が下降位置に位置した状態時において、基端部が昇降軸65とともに少し下降しつつ、全体が昇降軸65を中心として昇降体51に対して上方に回動する。
【0032】
このとき、ローラ体53が、コンテナ2の底板11に接触することなく、コンテナ2の回動側板13を上枠12に対して組立姿勢になるまで下方に押圧回動させる。つまりこのとき、ローラ体53の外周面53aは、コンテナ2の底板11の上面に接触することなく、底板11の上方近傍位置でコンテナ2の回動側板13の内面を押圧して組立姿勢になるまで回動させる。なお、ローラ体53が最も底板11に接近した状態時において、ローラ体53の外周面53aの下端とコンテナ2の底板11の上面との間には、所定距離の間隙70が存在する(図15参照)。
【0033】
また、押圧回動手段32は、昇降体51を固定機枠30に対して上昇位置と下降位置との間で昇降させるとともに、昇降体51が下降位置に位置した状態時に可動体52を昇降体51に対して可動させる駆動部71を有している。
【0034】
駆動部71は、固定機枠30に固定されたモータ等の駆動源72を有し、この駆動源72から前後方向の回転駆動軸73が前方に向かって突出し、この回転駆動軸73にはこの回転駆動軸73とともに回転する回転部材である回転アーム74が固着されている。また、回転アーム74の一端部には連結ロッド75の上端部が回動可能に連結され、この連結ロッド75の下端部が連結部材76に回動可能に連結され、この連結部材76に可動体52の昇降軸65が取り付けられている。連結部材76は、昇降体51の昇降本体部56に昇降可能に設けられている。
【0035】
さらに、押圧回動手段32は、ローラ体53による押圧回動に先立って、コンテナ2の回動側板13を予め少しだけ下方に押圧回動させる追加押圧回動体81を有している。
【0036】
追加押圧回動体81は、例えば伸び動作によりコンテナ2の両回動側板13を下方に押圧回動させる前後1対のエアシリンダ等のシリンダ82にて構成されている。シリンダ82は、昇降体51の昇降本体部56に対して固定されたシリンダ本体83と、このシリンダ本体83内に対して出入りして下降および上昇する昇降可能なロッド84とを有している。また、ロッド84の下端部には、コンテナ2の回動側板13と接触する例えばゴム或いは合成樹脂等の弾性変形可能な緩衝部材85が装着されている。なお、緩衝部材85は、コンテナ2の底板11とは接触しないようになっている。つまり、昇降体51が下降位置に位置して追加押圧回動体81が最も底板11に接近した状態時において、緩衝部材85の下端とコンテナ2の底板11の上面との間には所定距離の間隙(図示せず)が存在する。
【0037】
次に、コンテナ組立装置1の動作等を図面を参照して説明する。
【0038】
図8(a)および(b)に示すように、折畳状態のコンテナ2が、コンテナ取出部20にて段ばらしされ、コンテナ搬送部22にて所定位置まで搬送されると、コンテナ2の底板11が、両ストッパ26,27にて前後から挟持されてその所定位置に固定される。
【0039】
次いで、図9(a)および(b)に示すように、コンテナ2の上枠12が、持上手段31のピン38にて左右から挟持されて所定位置まで持ち上げられ、両ストッパ26,27で固定した底板11から上方へ離れる。
【0040】
また、コンテナ2の上枠12が所定位置まで持ち上げられることにより、折り曲げられていた左右1対の折曲側板14が展開して鉛直面に沿った平板状の組立姿勢になる。なお、コンテナ2の上枠12は、コンテナ2が組立状態になるまで、持上手段31のピン38にて左右から挟持された状態のまま、底板11から上方に離れた所定位置に固定されている。
【0041】
その後、互いに重なり合った前後1対の回動側板13が、追加押圧回動体81のシリンダ82にて落される。つまり、シリンダ82が伸び動作してロッド84が所定位置まで下降することにより、緩衝部材85が回動側板13に接触(当接)してこの回動側板13を上枠12に対して下方に押圧回動させる。なお、シリンダ82は、伸び動作した後、直ぐに縮み動作して元の待機状態に戻る。
【0042】
次いで、図10(a)および(b)に示すように、押圧回動手段32の昇降体51が下降し、可動体52およびローラ体53がコンテナ2内に挿入される。
【0043】
そして、図11(a)および(b)に示すように、昇降体51が予め設定された下降位置まで下降した後に、可動体52が基端部の昇降軸65を中心として上方に回動し、その結果、ローラ体53が、コンテナ2の底板11に接触することなく、コンテナ2の回動側板13を上枠12に対して組立姿勢になるまで下方に押圧回動させる。こうして、前後1対の回動側板13が組立姿勢となって底板11に対して固定され、コンテナ2が組立状態となる。
【0044】
この組立状態となったコンテナ2は、図12(a)および(b)に示すように、昇降体51が予め設定された上限位置まで上昇し、ストッパ26,27による底板11の挟持固定とピン38による上枠12の挟持固定とが解除された後、組立側コンベヤ24の搬送ベルト25にて搬送されて搬送装置4の搬送面5上に供給される。
【0045】
ここで、図13および図14に示すように、押圧回動手段32の駆動部71の回転アーム74が回転駆動軸73とともに1回転、つまり360度回転する間に、昇降体51は、上昇位置から下降位置まで下降した後、その下降位置からその上昇位置まで上昇する。
【0046】
図14(a)に示すように、昇降体51が上昇位置に位置した状態では、連結ロッド75の上端部が回転駆動軸73よりも上方側に位置し、昇降体51の当接部58が固定ガイド体61の当接受部63から上方に離れている。
【0047】
そして、図14(b)に示すように、回転アーム74が基準位置から例えば150度回転した時点で、昇降体51の当接部58が固定ガイド体61の当接受部63に当接し、この当接により昇降体51の下降が規制されて昇降体51が下降位置に停止する。
【0048】
その後、図14(c)に示すように、回転アーム74がさらに例えば30度回転する間に、連結ロッド75が連結部材76を所定量だけ押し下げる。つまり、連結ロッド75の下動に基づいて昇降軸65が所定量だけ下降する。
【0049】
すると、図15に示すように、前後対をなす可動体52は、先端側のローラ体53が互いに離れる方向に移動するように、昇降軸65を中心として昇降体51に対して上方に回動する。
【0050】
このとき、ローラ体53は、コンテナ2の底板11の上面に接触することなく、コンテナ2の回動側板13を上枠12に対して組立姿勢になるまで下方に押圧回動させる。つまり、前側のローラ体53が前側の回動側板13を前方へ押圧して組立姿勢になるまで回動させかつ後側のローラ体53が後側の回動側板13を後方へ押圧して組立姿勢になるまで回動させる。
【0051】
なおその後、回転アーム74がさらに例えば30度回転すると、連結ロッド75が連結部材76を所定量だけ引き上げるため、ローラ体53が下方に回動して組立姿勢の回動側板13から離れる。続いて、回転アーム74が元の基準位置まで回転すると、昇降体51が上昇位置まで上昇する。
【0052】
そして、このようなコンテナ組立装置1によれば、押圧回動手段32は、上昇位置と下降位置との間で昇降する昇降体51と、この昇降体51とともに昇降し昇降体51が下降位置に位置した状態時に昇降体51に対して先端側が回動側板13側に接近するように可動する可動体52と、この可動体52に設けられコンテナ2の底板11に接触することなく前後の回動側板13を組立姿勢になるまで押圧回動させるローラ体53とを有するため、コンテナ2の破損を防止しつつ、組立処理能力の向上を図ることができ、しかも、コンテナ2の組立処理時に発生する騒音および振動等を抑制できる。
【0053】
また、押圧回動手段32は昇降体51の当接部58との当接によりこの昇降体51を下降位置に停止させるストッパ体64を有するため、ストッパ体64にて昇降体51を下降位置に適切に停止させることができ、また駆動部71の作動によって可動体52を昇降体51に対して可動させることができる。
【0054】
さらに、押圧回動手段32はローラ体53による押圧回動に先立ってコンテナ2の回動側板13を上枠12に対して押圧回動させる追加押圧回動体81を有するため、互いに重なり合った前後の回動側板13同士の引っ掛かりを防止でき、大きめのコンテナ2にも適切に対応可能であり、コンテナ2の破損を効果的に防止でき、また押圧回動手段32の大きさを小型化できる。
【0055】
なお、コンテナ組立装置1の押圧回動手段32は、例えば図16に示すものであっても、同様の作用効果を奏することができる。
【0056】
この図16に示すものでは、可動体52の基端部(下端部)が昇降体51の昇降本体部56の下端部に軸67を中心として回動可能に連結され、可動体52の先端部(上端部)にローラ体53が軸54を中心として回転可能に取り付けられている。また、可動体52の基端部には、コンテナ2の回動側板13を上枠12に対して押圧回動させる補助ローラ体91が軸67を中心として回転可能に取り付けられている。なお、昇降体51が下降位置に位置した状態時において補助ローラ体91の外周面の下端とコンテナ2の底板11の上面との間には、所定距離の間隙70が存在する。さらに、支持アーム体66の一端部(上端部)が昇降軸65を介して昇降本体部56に昇降可能に取り付けられ、支持アーム体66の他端部(下端部)が可動体52の長手方向中間部に軸68を中心として回動可能に連結されている。
【0057】
また、コンテナ2は、その種類等によって大きさも異なり、例えば図17に示すような高さ寸法が低い小さめのコンテナ2であれば、追加押圧回動体81を作動させる必要がなく、また追加押圧回動体81を設けなくてもよい。
【0058】
さらに、例えば可動体52は、昇降体51に対して上下方向に回動するものには限定されず、例えば昇降体51に対して前後方向に移動するもの等でもよい。
【符号の説明】
【0059】
1 コンテナ組立装置
2 コンテナ
11 底板
12 上枠
13 回動側板
31 持上手段
32 押圧回動手段
51 昇降体
52 可動体
53 押圧回動体であるローラ体
64 ストッパ体
81 追加押圧回動体
【特許請求の範囲】
【請求項1】
底板、上枠およびこの上枠に対して回動可能な回動側板を有する折畳可能なコンテナを折畳状態から組立状態にするコンテナ組立装置であって、
コンテナの上枠を持ち上げる持上手段と、
コンテナの回動側板を押圧回動させる押圧回動手段とを備え、
前記押圧回動手段は、
上昇位置と下降位置との間で昇降する昇降体と、
この昇降体とともに昇降し、前記昇降体が下降位置に位置した状態時に前記昇降体に対して可動する可動体と、
この可動体に設けられ、コンテナの底板に接触することなくコンテナの回動側板を組立姿勢になるまで押圧回動させる押圧回動体とを有する
ことを特徴とするコンテナ組立装置。
【請求項2】
押圧回動手段は、昇降体との当接によりこの昇降体を下降位置に停止させるストッパ体を有する
ことを特徴とする請求項1記載のコンテナ組立装置。
【請求項3】
押圧回動手段は、押圧回動体による押圧回動に先立ってコンテナの回動側板を押圧回動させる追加押圧回動体を有する
ことを特徴とする請求項1または2記載のコンテナ組立装置。
【請求項4】
押圧回動体は、可動体に回転可能に設けられたローラ体である
ことを特徴とする請求項1ないし3のいずれか一記載のコンテナ組立装置。
【請求項1】
底板、上枠およびこの上枠に対して回動可能な回動側板を有する折畳可能なコンテナを折畳状態から組立状態にするコンテナ組立装置であって、
コンテナの上枠を持ち上げる持上手段と、
コンテナの回動側板を押圧回動させる押圧回動手段とを備え、
前記押圧回動手段は、
上昇位置と下降位置との間で昇降する昇降体と、
この昇降体とともに昇降し、前記昇降体が下降位置に位置した状態時に前記昇降体に対して可動する可動体と、
この可動体に設けられ、コンテナの底板に接触することなくコンテナの回動側板を組立姿勢になるまで押圧回動させる押圧回動体とを有する
ことを特徴とするコンテナ組立装置。
【請求項2】
押圧回動手段は、昇降体との当接によりこの昇降体を下降位置に停止させるストッパ体を有する
ことを特徴とする請求項1記載のコンテナ組立装置。
【請求項3】
押圧回動手段は、押圧回動体による押圧回動に先立ってコンテナの回動側板を押圧回動させる追加押圧回動体を有する
ことを特徴とする請求項1または2記載のコンテナ組立装置。
【請求項4】
押圧回動体は、可動体に回転可能に設けられたローラ体である
ことを特徴とする請求項1ないし3のいずれか一記載のコンテナ組立装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【公開番号】特開2012−140177(P2012−140177A)
【公開日】平成24年7月26日(2012.7.26)
【国際特許分類】
【出願番号】特願2011−1330(P2011−1330)
【出願日】平成23年1月6日(2011.1.6)
【出願人】(000103426)オークラ輸送機株式会社 (84)
【出願人】(592088518)オークラ工業株式会社 (3)
【Fターム(参考)】
【公開日】平成24年7月26日(2012.7.26)
【国際特許分類】
【出願日】平成23年1月6日(2011.1.6)
【出願人】(000103426)オークラ輸送機株式会社 (84)
【出願人】(592088518)オークラ工業株式会社 (3)
【Fターム(参考)】
[ Back to top ]