
コンベヤ駆動装置
【課題】部品点数を削減して納期の短縮化とコストダウンを図り得ると共に、効率を高めて省エネルギ化とコンパクト化を図ることができ、更に外観向上をも図り得るコンベヤ駆動装置を提供する。
【解決手段】コンベヤ1の駆動軸2をダイレクトドライブ方式で回転駆動する永久磁石同期モータ3を備え、該永久磁石同期モータ3の各相の巻線に発生する誘起電圧に対して進み位相となるよう通電を行うことにより、該永久磁石同期モータ3が所定の回転数範囲内でトルク一定となるよう構成する。
【解決手段】コンベヤ1の駆動軸2をダイレクトドライブ方式で回転駆動する永久磁石同期モータ3を備え、該永久磁石同期モータ3の各相の巻線に発生する誘起電圧に対して進み位相となるよう通電を行うことにより、該永久磁石同期モータ3が所定の回転数範囲内でトルク一定となるよう構成する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、コンベヤ駆動装置に関するものである。
【背景技術】
【0002】
一般に、空港、郵便局、配送センター、トラックターミナル等の物流施設では荷物を運搬するためのベルトコンベヤやローラコンベヤ等のコンベヤが設置されている。これらの物流施設では、一つ一つの搬送物(ワーク)については、人が運べる重さ及び容積程度のものを運搬する。
【0003】
従来、コンベヤを駆動するためのモータとしては、構造や取扱いの簡便さ、安価なこと及び民生用として多種多容量の品揃えがあることから、インダクションモータ(誘導電動機)が汎用的に使用される。通常、前記物流施設におけるコンベヤを駆動するためのインダクションモータの容量としては、0.2[kw]、0.4[kw]、0.75[kw]、1.5[kw]、2.2[kw]、3.0[kw]、3.7[kw]である七種類のモータが、その必要搬送トルクにより選定されるよう用意され、コンベヤの能力に応じて所望の容量のモータが選定されるようになっている。
【0004】
前記コンベヤを駆動する駆動源であるモータは、搬送するワークの速さ、必要な力に合わせて出力、つまりモータ容量を選定するが、一般に搬送するワークの速度に対して、電動機の回転速度は速く、回転力(トルク)は小さいものである。駆動源の出力P[W]は次式で表される。
[数1]
P=(T・N)/97.3
但し、P:出力[W]
T:トルク[kgf・cm]
97.3:定数
N:回転数[rpm]
【0005】
そして、前記コンベヤの駆動軸に対し減速機を介して前記選定されたモータが接続されるようになっている。前記[数1]において出力一定とした場合、回転数Nを減らすと、トルクTを増加させることができ、つまり減速機は、速度を減速しながらトルクを増幅するのである。これにより、搬送するワークの速度や搬送必要力に対して、出力一定においては使いやすいインダクションモータを適用させることができる。
【0006】
尚、前述の如きコンベヤを駆動するモータと関連する一般的技術水準を示すものとしては、例えば、特許文献1、2がある。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開平06−280946号公報
【特許文献2】特開2005−263386号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかしながら、前述の如き従来のインダクションモータを適用したコンベヤ駆動装置においては、各種施設における様々なワークの搬送に適応させる、搬送するワークの速度や搬送必要力をカバーするため、モータ出力とその回転数に応じて、必要トルクと回転数から網羅していくと、前記容量の異なるモータ毎にそれぞれ減速比の異なる八種類前後の減速機を必要としていた。
【0009】
インダクションモータの場合、前述のように搬送するワークの速度に対して、電動機の回転速度は速く、回転力(トルク)は小さいものであり、たとえインバータにより電源周波数を変化させて周波数を小さくすることで電動機回転速度を遅くできても、トルクも小さくなってしまう。又、電動機の極数を増やすと回転速度は小さくできるが、スペースも小さくなって各極でのコイル巻きに制限ができ基本的にトルクも小さくなるし、トルクを変えないままで極数可変とするのは無理である。このように搬送力の確保ができないため、どうしてもトルクを増幅できる減速機を必要とするからである。
【0010】
このため、前記コンベヤの駆動部における構成部品も相当数の種類が必要となり、部品点数が増えて納期が長引くと共に、コストアップにもつながるという欠点を有していた。
【0011】
又、前記モータからコンベヤの駆動軸に至る回転力伝達経路中に減速機が設けられているため、効率が低下すると共に、装置全体をコンパクト化することが難しく、外観も悪くなるという不具合があった。
【0012】
本発明は、斯かる実情に鑑み、インバータ装置によって通電制御する永久磁石モータについてその制御を工夫することでコンベヤ駆動装置に利用し、搬送するワークの速度に対して、電動機の回転速度をマッチングさせ、且つ、必要回転力(トルク)の確保可能なダイレクトドライブ駆動装置として適用することで、少品種のモータに限定でき、部品点数を削減して納期の短縮化とコストダウンを図り得ると共に、効率を高めて省エネルギ化とコンパクト化を図ることができ、更に外観向上をも図り得るコンベヤ駆動装置を提供しようとするものである。
【課題を解決するための手段】
【0013】
本発明は、コンベヤの駆動軸をダイレクトドライブ方式で回転駆動する、三相電源がインバータ装置から供給され、回転軸に固定された永久磁石回転子とその周囲外側に位置するステータとからなるインナーロータ型の永久磁石同期モータを備えたコンベヤ駆動装置であって、
前記インバータ装置は、
前記永久磁石同期モータの回転数が1[rpm]から所定の第一回転数までの範囲は、前記ステータ各相の巻線に発生する誘起電圧に対して同位相の電流となるよう通電を行う第一運転範囲と、
前記永久磁石同期モータの回転数が所定の第一回転数から所定の第二回転数までの範囲は、前記ステータ各相の巻線に発生する誘起電圧に対して進み位相の電流となるよう通電を行う第二運転範囲とを切り替えることにより、
前記永久磁石同期モータが1[rpm]から所定の第二回転数の範囲内で略トルク一定となるよう構成したことを特徴とするコンベヤ駆動装置にかかるものである。
【0014】
前記コンベヤ駆動装置において、前記インバータ装置は、
前記ステータの巻線に誘起電圧を発生させる電流を通電する通電手段に配設された電流センサと、
該電流センサにより検出された電流信号を変換して、磁界と平行なd軸電流とこれに直交するq軸電流とに分離する電流変換手段と、
該電流変換手段から出力される前記d軸電流に関連した電流指令Idrに応じたd軸電圧、及び前記電流変換手段から出力される前記q軸電圧に関連した電流指令Iqrに応じたq軸電圧、にそれぞれ変換する電流制御手段と、
前記電流制御手段から出力されるd軸電圧及びq軸電圧を2相/3相変換して3相電圧信号を形成し、前記通電手段を介して各ステータ巻線に供給する直流電流のスイッチングを制御するPWM回路へ与える電圧変換手段とを有し、
前記第一運転範囲では、前記電流制御手段は、電流指令Iqrを必要回転数に応じて正方向に増加して出力し、且つ電流指令Idrはゼロ出力のままとし、
前記第二運転範囲では、前記電流制御手段は、電流指令Iqrに応じたq軸電圧が所定値になった時点から、電流指令Idrを負方向に推移させることで、前記ステータ各相の巻線に発生する誘起電圧に対して進み位相の電流となるようにすることができる。
【0015】
前記コンベヤ駆動装置においては、磁界と平行なd軸電流とこれに直交するq軸電流とに分離する前記電流変換手段から出力されるd軸電流とq軸電流と、更に前記d軸電圧とを入力する位置推定手段が、前記d軸電流と前記q軸電流と前記d軸電圧から、d軸方向の誘起電圧を演算し、更に、角周波数と回転位置とを決定する機能を備えることで、
前記永久磁石回転子の磁極位置を推定監視するインバータ装置を有するようにすることが好ましい。
【0016】
前記コンベヤ駆動装置においては、前記永久磁石回転子に固定された回転軸が中空のホローシャフトになっているようにすることができる。
【0017】
前記コンベヤ駆動装置において、前記永久磁石同期モータの前記所定の第一回転数は、100[rpm]から300[rpm]のいずれかの数値をとり、
前記永久磁石同期モータの前記所定の第二回転数は、300[rmp]から800[rpm]のいずれかの数値をとるようにすることもできる。
【0018】
前記コンベヤ駆動装置においては、単位長さ当りの搬送物重量の上限が50[kg/m]、
コンベヤ速度の上限が200[m/min]、
コンベヤ機長の上限が10[m]である一般物流用のコンベヤに適用することが有効となる。
【0019】
上記手段によれば、以下のような作用が得られる。
【0020】
前述の如く、コンベヤの駆動軸をダイレクトドライブ方式で回転駆動する、三相電源がインバータ装置から供給され、回転軸に固定された永久磁石回転子とその周囲外側に位置するステータとからなるインナーロータ型の永久磁石同期モータを備え、前記インバータ装置は、
前記永久磁石同期モータの回転数が1[rpm]から所定の第一回転数までの範囲は、前記ステータ各相の巻線に発生する誘起電圧に対して同位相の電流となるよう通電を行う第一運転範囲と、
前記永久磁石同期モータの回転数が所定の第一回転数から所定の第二回転数までの範囲は、前記ステータ各相の巻線に発生する誘起電圧に対して進み位相の電流となるよう通電を行う第二運転範囲とを切り替えることにより、
前記永久磁石同期モータが1[rpm]から所定の第二回転数の範囲内で略トルク一定となるよう構成すると、一般物流用のコンベヤであれば、該コンベヤの能力にかかわらず、一種類か二種類程度の容量の永久磁石同期モータで対応することが可能となり、減速機も不要となる。
【0021】
この結果、従来のコンベヤ駆動装置に比べて、容量の異なるモータ毎にそれぞれ減速比の異なる複数種類の減速機を必要としなくなるため、前記コンベヤの駆動部における構成部品も最小限で済み、部品点数が増えず納期が短くなると共に、コストアップも避けられる。
【0022】
又、前記永久磁石同期モータからコンベヤの駆動軸に至る回転力伝達経路中に減速機が設けられていないため、効率が良くなると共に、装置全体をコンパクト化することが可能となり、外観も良くなる。
【発明の効果】
【0023】
本発明のコンベヤ駆動装置によれば、部品点数を削減して納期の短縮化とコストダウンを図り得ると共に、効率を高めて省エネルギ化とコンパクト化を図ることができ、更に外観向上をも図り得るという優れた効果を奏し得る。
【図面の簡単な説明】
【0024】
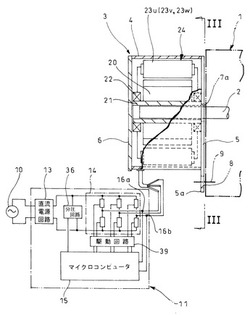
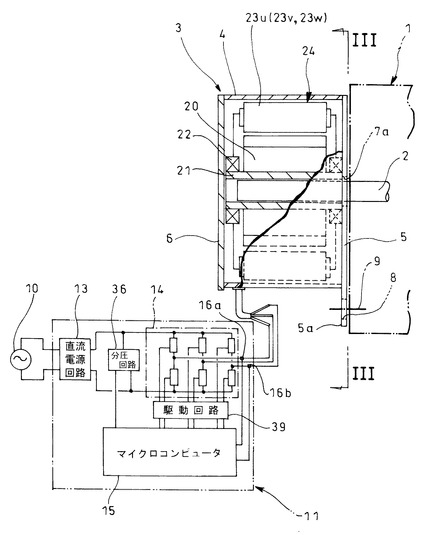
【図1】本発明のコンベヤ駆動装置の実施例を示す概要構成図であって、ケーシングを一部切除して内部断面を示す図である。
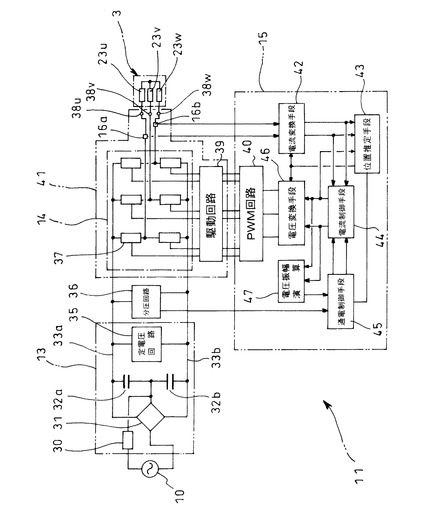
【図2】本発明のコンベヤ駆動装置の実施例におけるインバータ装置を示すブロック図である。
【図3】図1のIII−III矢視図である。
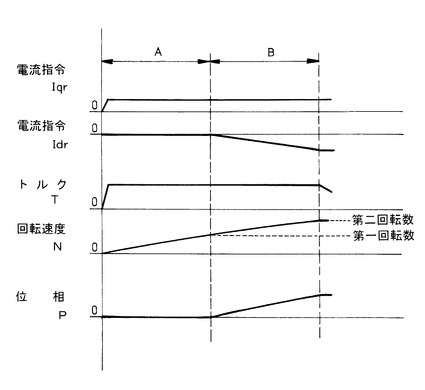
【図4】本発明のコンベヤ駆動装置の実施例における永久磁石同期モータのトルクT及び回転速度Nを基とした各特性を示す線図である。
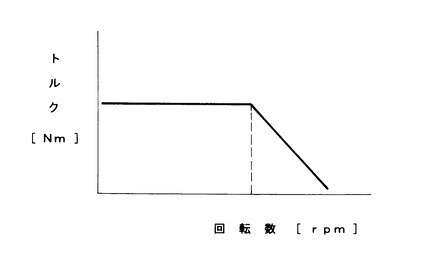
【図5】本発明のコンベヤ駆動装置の実施例における永久磁石同期モータの回転数−トルク特性を示す線図である。
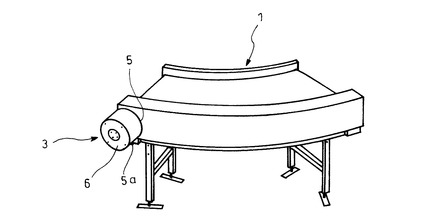
【図6】本発明のコンベヤ駆動装置の実施例における永久磁石同期モータをコンベヤに装着した状態を示す斜視図である。
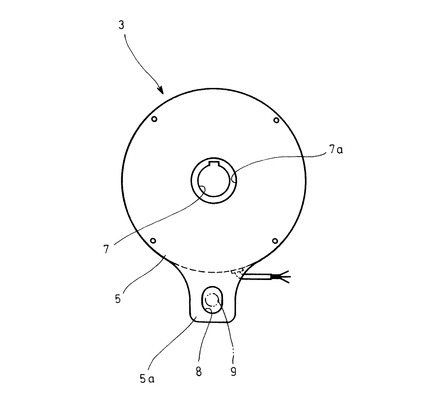
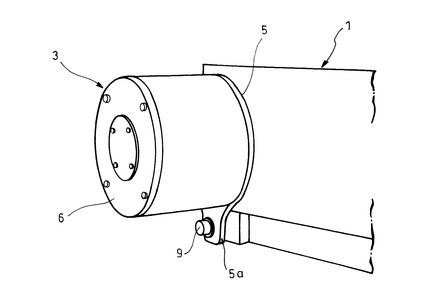
【図7】本発明のコンベヤ駆動装置の実施例における永久磁石同期モータをコンベヤに装着した状態を示す拡大斜視図である。
【発明を実施するための形態】
【0025】
以下、本発明の実施の形態を添付図面を参照して説明する。
【0026】
図1〜図7は本発明のコンベヤ駆動装置の実施例であって、コンベヤ1の駆動軸2をダイレクトドライブ方式で回転駆動する永久磁石同期モータ3を備えたコンベヤ駆動装置である。
【0027】
前記コンベヤ1は、例えば、ベルトコンベヤであって、その駆動軸2が頭部プーリに固定された駆動プーリ中心軸である場合でも良いし、前記コンベヤ1が、例えば、ローラコンベヤであり、並列されている駆動ローラの親に当たる駆動ローラの中心軸を駆動軸2として他の駆動ローラをタイミングベルトやチェーンを介して回転させるように連動する場合でも良いし、例えばその他の形式例として、チェーン駆動で駆動部を駆動する元のスプロケットの中心軸を駆動軸2としたコンベヤの場合等でも良い。いずれも、前記コンベヤ1の機側フレーム外側等から突出している駆動軸2を駆動する駆動源の技術である。
【0028】
前記永久磁石同期モータ3は、コンベヤ1の機側に設置しても可動部がむき出しのため触れると巻込み事故が発生するという問題のない、インナーロータ型の永久磁石同期モータ(一部の形式は一般にブラシレスDCモータといわれるものも含む)である。そして、この形式の永久磁石同期モータ3では、回転子表面に磁石が配置されたSPMモータ(Surface Permanent Magnet motor)、或いは回転子の中に磁石が埋め込まれたIPMモータ(Interior Permanent Magnet motor)として公知のものであるが、本実施例の場合、円筒状のケーシング4の軸線方向片端面のコンベヤ機側に近い方を覆うようにトルクアーム部5aが下部に突出する側板5が取り付けられ、前記ケーシング4の軸線方向もう片端面のコンベヤ機側から遠い方を覆うように側板6が取り付けられ、前記側板5の中心部に穿設された中心軸孔7aから、前記永久磁石同期モータ3の内部の回転子20の同心中心に固定されケーシング4に軸受22を介して回動自在に支持される中空軸(ホローシャフト)21の中央孔部7に前記コンベヤ1の駆動軸2を挿入し、図示していないキーを駆動軸2と中空軸21それぞれの溝に打ち込んで固定することにより、該コンベヤ1の駆動軸2をダイレクトドライブ方式で回転駆動するようになっている。尚、前記側板5の下方のトルクアーム部5aは、図3に示す如く、その張出部に穿設された係止孔8にボルト9を僅かな隙間をあけて挿入し、図7に示す如く、該ボルト9によりコンベヤ1側のフレームに固定することで、該コンベヤ1側のフレームに固定されたボルト9に対し係止孔8を介して係合されるようになっており、前記永久磁石同期モータ3が回転している際に、駆動軸2側のトルクに負けて該永久磁石同期モータ3自体が回転してしまうことを阻止し、且つ、前記永久磁石同期モータの始動時には、トルクアーム部5aの係止孔8とボルト9との隙間により、強大な始動トルクを一旦いなしてから回転させることで、駆動軸2側や永久磁石同期モータ3側の回転部分へ無理な力がかかるのを分散するようになっている。
【0029】
前記永久磁石同期モータ3は、モータ回転軸である中空軸21に固定された永久磁石回転子20と、その周囲外側に位置し各極毎に巻線23u、23v、23wを施すステータ24とからなるインナーロータ型である。永久磁石回転子20は、SPMモータとしての回転子表面に磁石が配置されたものでも、IPMモータとしての回転子の中に磁石が埋め込まれたものでもどちらでも適用可能である。
【0030】
前記永久磁石同期モータ3は、図1に示す如く、交流電源10に対し、インバータ装置11を介して接続されており、特に回転子20の回転位置を検知して位置信号を出力するホールIC等の物理的位置検知手段は設けられていない。
【0031】
前記インバータ装置11は、交流を直流に変換する直流電源回路13と、駆動用直流電流とスイッチング制御を行うマイクロコンピュータ15への制御電流とを分流する分圧回路36と、スイッチング素子等によりPWM(パルス幅変調)制御して通電するために備わり下流のケーブルを含んで通電手段を形成するインバータ主回路14と、駆動回路39を介してインバータ主回路14にPWM制御信号を送るマイクロコンピュータ15とを備え、該マイクロコンピュータ15において、モータ起動時のロータ位置を検知する位置信号として、通電手段に配設された電流センサで計測される電流値によって、前記回転子20のステータ24との位置関係を推定し、且つ、各ステータ24の各相と回転子20の永久磁石が形成する磁界による誘導電流の相との、位相の同期や進角も制御して通電波形データを読み出すことにより通電信号を形成するようになっており、該マイクロコンピュータ15からの通電信号に基づいて前記インバータ主回路14から永久磁石同期モータ3に通電するようになっている。
【0032】
前記永久磁石同期モータ3の中心軸21の回転数が1[rpm]から所定の第一回転数(例えば、100[rpm]から300[rpm]のいずれかの数値)までの範囲は、前記ステータ24各相の巻線23u、23v、23wに発生する誘起電圧に対して同位相の電流となるよう通電を行って低速高トルクのモータ運転を実現し、永久磁石同期モータ3の中心軸21の回転数が所定の第一回転数から所定の第二回転数(例えば、300[rmp]から800[rpm]のいずれかの数値)までの範囲は、前記ステータ24各相の巻線23u、23v、23wに発生する誘起電圧に対して進み位相の電流となるよう通電を行うことにより、高速低トルクのモータ運転を実現し、通して略一定のトルク運転ができるモータを提供している。
【0033】
前記永久磁石同期モータ3を備えたコンベヤ駆動装置の電気的構成について、図2を参照して説明する。この図2において、交流電源10の両端子は、一方にリアクトル30を介して全波整流回路31の入力端子に接続されている。全波整流回路31の出力端子間には、平滑コンデンサ32a、32bが接続されており、この平滑コンデンサ32a、32bと全波整流回路31とから直流電源回路13が構成されている。
【0034】
この直流電源回路13の出力端子から導出された直流母線33a、33b間には、定電圧回路35と分圧回路36とインバータ主回路14が接続されている。インバータ主回路14は、3相ブリッジ接続された例えばIGBTからなるスイッチング素子と、これらスイッチング素子にそれぞれ並列接続されたフリーホイールダイオードの6組の要素37とから構成されている。
【0035】
そして、インバータ主回路14の出力端子38u、38v、38wは、永久磁石同期モータ3の3相の巻線23u、23v、23wに接続されている。又、インバータ主回路14の各スイッチング素子の制御端子(ゲート)は、例えばフォトカプラからなる駆動回路39に接続されている。この駆動回路39はPWM回路40からの信号により制御されて上記各スイッチング素子をオンオフ制御するようになっている。
【0036】
これらインバータ主回路14、駆動回路39及び電源供給の出力端子38u、38v、38wまでのケーブルから通電手段41が構成されている。
【0037】
前記PWM回路40は、内部に所定周波数の三角波形信号を発生する手段を備えており、次に述べるマイクロコンピュータ15から与えられる通電信号Du、Dv、Dwと前記三角波形とを比較し、その比較結果を駆動信号Vup、Vun、Vvp、Vvn、Vwp、Vwnとして駆動回路39に出力するように構成されている。
【0038】
マイクロコンピュータ15は、通電信号Du、Dv、Dwとして例えば3相正弦波信号(8ビットの出力波形データ)Du、Dv、Dwを形成し、これら通電信号Du、Dv、Dwを内蔵するPWM回路40に与えるように構成されている。
【0039】
そして、上述の通電手段41と、マイクロコンピュータ15と、直流電源回路13とから、永久磁石同期モータ3を通電制御するインバータ装置11が構成されている。
【0040】
図1、図2において、通電手段41の出力線には、電流センサ16a、16bが配設されており、これら電流センサ16a、16bにより検出された電流信号Iu,Iwは電流変換手段42へ与えられる。この電流変換手段42は、電流信号Iu,Iwを3相/2相変換を行って、磁界と平行な電流Idとこれに直交する電流Iqとに分離し、これら電流Id、Iqを位置推定手段43と電流制御手段44へ与える。
【0041】
前記電流制御手段44は、通電制御手段45から出力される電流指令Idr,Iqrと前記電流Id,Iqを受けて、電流Id,Iqと電流指令Idr,Iqrがそれぞれ一致するように電圧Vd,Vqを決定し、これら電圧Vd,Vqを電圧変換手段46へ出力するように構成されている。そして、電圧変換手段46は、電圧Vd,Vqを2相/3相変換して3相電圧信号Du,Dv,Dwを形成し、これらをPWM回路40へ与えるようになっている。
【0042】
又、位置センサを省略して永久磁石同期モータ3を駆動するように構成しており、そのために、位置推定手段43を備えている。この位置推定手段43は、電流Id,Iqと電圧Vdを入力して、これらに基づいて次の数式によりd軸方向の誘起電圧Edを計算する機能を有している。
[数2]
Ed=Vd−RId+ωLIq
但し、R:巻線抵抗
L:インダクタンス
ω:角周波数
【0043】
更に、位置推定手段43は、次の数式によって角周波数ωと回転位置Θを決定する機能を有しており、角周波数ωを通電制御手段45へ与え、回転位置Θを電流変換手段42と電圧変換手段46とに与えるように構成されている。
[数3]
ω=ω−KEd
Θ=∫ωdt
但し、K:ゲイン定数
【0044】
次に、上記構成の作用、特にステータ24各相の巻線23u、23v、23wに発生する誘起電圧に対して同位相の電流となるよう通電を行う第一運転範囲の永久磁石同期モータ3の通電制御の動作について図4を参照して説明する。第一運転範囲の運転において、モータ3を始動する場合、マイクロコンピュータ15の通電制御手段45は、電流指令Iqrをゼロから徐々に増加させる。そして、電流変換手段42、電流制御手段44、電圧変換手段46の作用により、電流Iqが電流指令Iqrに一致するように、3相電圧信号Vu,Vv、Vwが形成され、PWM回路40へ出力される。これにより、通電手段41によってモータ3が通電され、モータ3が始動し、所定の第一回転数を下回る設定回転数になるまで加速されてその後一定運転する。このとき、電流指令Idrは、ゼロに設定されている。これが図4における区間Aである。
【0045】
ここで、通電制御手段45は、電流指令Idrを次のようにして決定するように構成されている。即ち、電圧振幅演算回路47からの電圧信号Vaと分圧回路36からの直流電圧信号DCVを比較して、
Va≧DCVのとき、電流指令Idr=Idr−x
Va<DCVのとき、電流指令Idr=Idr+x
としている。但し、電流指令Idr≦0である。
【0046】
又、電圧振幅演算回路47は、電流制御手段42からの電圧Vd,Vqに基づいて出力電圧の線間振幅電圧Vaを演算する機能を有しており、この線間振幅電圧Vaを通電制御手段45へ与える。そして、通電制御手段45は、上記線間振幅電圧Va、分圧回路36からの直流電圧信号DCV、位置推定手段43からの角周波数(回転数情報)ω等の信号が与えられるように構成されている。
【0047】
続いて、前記ステータ24各相の巻線23u、23v、23wに発生する誘起電圧に対して進み位相の電流となるよう通電を行う第二運転範囲の永久磁石同期モータ3の通電制御の動作について図4を参照して説明する。
【0048】
第一回転数を超えて、モータ3の回転速度をさらに増加させる場合、電圧信号Vaと直流電圧信号DCVとが略一致した時点(これが第一回転数)を超えると、電流指令Idrを負方向に推移させ始める。図4の区間Bに示すように、設定回転速度(例えば、800[rpm])に達するまでの間、電流指令Idrを負方向に推移させる。この場合、電流が誘起電圧に対して進み位相状態、即ち、弱め界磁状態となっている。
【0049】
上記のように、本実施例の場合、永久磁石同期モータの回転数が1[rpm]から所定の第一回転数までの範囲は、前記ステータ24各相の巻線23u、23v、23wに発生する誘起電圧に対して同位相の電流となるよう通電を行う第一運転範囲と、前記永久磁石同期モータの回転数が所定の第一回転数から所定の第二回転数までの範囲は、前記ステータ24各相の巻線23u、23v、23wに発生する誘起電圧に対して進み位相の電流となるよう通電を行う第二運転範囲とを切り替えることにより、該永久磁石同期モータ3が所定の回転数範囲内でトルク一定となるよう構成した点を特徴としている。
【0050】
このように構成した理由は、本発明者の研究の結果、単位長さ当りの搬送物重量の上限が50[kg/m]、コンベヤ速度の上限が200[m/min]、コンベヤ機長の上限が10[m]である一般物流用のコンベヤの場合、下記の[表1]に示されるように、所定の回転数範囲内でトルク一定となるモータであれば、従来のように、複数種類の容量のモータを用意する必要がなくなることが判明したためである。
【表1】

【0051】
即ち、前記永久磁石同期モータ3の各相の巻線23u、23v、23wに発生する誘起電圧に対して進み位相となるよう通電を行えば、図5に示す如く、該永久磁石同期モータ3が所定の回転数範囲内でトルク一定となるよう構成することが可能となる。
【0052】
次に、上記実施例の作用を説明する。
【0053】
前述の如く、コンベヤ1の駆動軸2をダイレクトドライブ方式で回転駆動する、三相電源がインバータ装置11から供給され、中空軸21に固定された永久磁石回転子20とその周囲外側に位置するステータ24とからなるインナーロータ型の永久磁石同期モータ3を備え、前記インバータ装置11は、前記永久磁石同期モータ3の回転数が1[rpm]から所定の第一回転数までの範囲は、前記ステータ24各相の巻線23u、23v、23wに発生する誘起電圧に対して同位相の電流となるよう通電を行う第一運転範囲と、前記永久磁石同期モータ3の回転数が所定の第一回転数から所定の第二回転数までの範囲は、前記ステータ24各相の巻線23u、23v、23wに発生する誘起電圧に対して進み位相の電流となるよう通電を行う第二運転範囲とを切り替えることにより、前記永久磁石同期モータ3が1[rpm]から所定の第二回転数の範囲内で略トルク一定となるよう構成すると、一般物流用のコンベヤ1であれば、該コンベヤ1の能力にかかわらず、一種類か二種類程度の容量の永久磁石同期モータ3で対応することが可能となり、減速機も不要となる。
【0054】
この結果、従来のコンベヤ駆動装置に比べて、容量の異なるモータ毎にそれぞれ減速比の異なる複数種類の減速機を必要としなくなるため、前記コンベヤの駆動部における構成部品も最小限で済み、部品点数が増えず納期が短くなると共に、コストアップも避けられる。
【0055】
又、前記永久磁石同期モータ3からコンベヤの駆動軸に至る回転力伝達経路中に減速機が設けられていないため、効率が良くなると共に、図6に示す如く、装置全体をコンパクト化することが可能となり、外観も良くなる。
【0056】
因みに、インバータ入力電源を200[V]−50[Hz]とし、インバータ出力周波数を50[Hz]とした電源条件のもと、0.4[kW]の永久磁石同期モータ3(本発明)と、0.4[kW]のインダクションモータ(従来)とを用いた負荷試験を行ったところ、試験結果は下記の[表2]に示されるようなものとなり、効率が約20[%]向上することが確認された。
【表2】
【0057】
こうして、部品点数を削減して納期の短縮化とコストダウンを図り得ると共に、効率を高めて省エネルギ化とコンパクト化を図ることができ、更に外観向上をも図り得る。
【0058】
尚、本発明のコンベヤ駆動装置は、上述の実施例にのみ限定されるものではなく、本発明の要旨を逸脱しない範囲内において種々変更を加え得ることは勿論である。
【符号の説明】
【0059】
1 コンベヤ
2 駆動軸
3 永久磁石同期モータ
10 交流電源
11 インバータ装置
12 ロータ位置検知手段
13 直流電源回路
14 インバータ回路
15 マイクロコンピュータ
【技術分野】
【0001】
本発明は、コンベヤ駆動装置に関するものである。
【背景技術】
【0002】
一般に、空港、郵便局、配送センター、トラックターミナル等の物流施設では荷物を運搬するためのベルトコンベヤやローラコンベヤ等のコンベヤが設置されている。これらの物流施設では、一つ一つの搬送物(ワーク)については、人が運べる重さ及び容積程度のものを運搬する。
【0003】
従来、コンベヤを駆動するためのモータとしては、構造や取扱いの簡便さ、安価なこと及び民生用として多種多容量の品揃えがあることから、インダクションモータ(誘導電動機)が汎用的に使用される。通常、前記物流施設におけるコンベヤを駆動するためのインダクションモータの容量としては、0.2[kw]、0.4[kw]、0.75[kw]、1.5[kw]、2.2[kw]、3.0[kw]、3.7[kw]である七種類のモータが、その必要搬送トルクにより選定されるよう用意され、コンベヤの能力に応じて所望の容量のモータが選定されるようになっている。
【0004】
前記コンベヤを駆動する駆動源であるモータは、搬送するワークの速さ、必要な力に合わせて出力、つまりモータ容量を選定するが、一般に搬送するワークの速度に対して、電動機の回転速度は速く、回転力(トルク)は小さいものである。駆動源の出力P[W]は次式で表される。
[数1]
P=(T・N)/97.3
但し、P:出力[W]
T:トルク[kgf・cm]
97.3:定数
N:回転数[rpm]
【0005】
そして、前記コンベヤの駆動軸に対し減速機を介して前記選定されたモータが接続されるようになっている。前記[数1]において出力一定とした場合、回転数Nを減らすと、トルクTを増加させることができ、つまり減速機は、速度を減速しながらトルクを増幅するのである。これにより、搬送するワークの速度や搬送必要力に対して、出力一定においては使いやすいインダクションモータを適用させることができる。
【0006】
尚、前述の如きコンベヤを駆動するモータと関連する一般的技術水準を示すものとしては、例えば、特許文献1、2がある。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開平06−280946号公報
【特許文献2】特開2005−263386号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかしながら、前述の如き従来のインダクションモータを適用したコンベヤ駆動装置においては、各種施設における様々なワークの搬送に適応させる、搬送するワークの速度や搬送必要力をカバーするため、モータ出力とその回転数に応じて、必要トルクと回転数から網羅していくと、前記容量の異なるモータ毎にそれぞれ減速比の異なる八種類前後の減速機を必要としていた。
【0009】
インダクションモータの場合、前述のように搬送するワークの速度に対して、電動機の回転速度は速く、回転力(トルク)は小さいものであり、たとえインバータにより電源周波数を変化させて周波数を小さくすることで電動機回転速度を遅くできても、トルクも小さくなってしまう。又、電動機の極数を増やすと回転速度は小さくできるが、スペースも小さくなって各極でのコイル巻きに制限ができ基本的にトルクも小さくなるし、トルクを変えないままで極数可変とするのは無理である。このように搬送力の確保ができないため、どうしてもトルクを増幅できる減速機を必要とするからである。
【0010】
このため、前記コンベヤの駆動部における構成部品も相当数の種類が必要となり、部品点数が増えて納期が長引くと共に、コストアップにもつながるという欠点を有していた。
【0011】
又、前記モータからコンベヤの駆動軸に至る回転力伝達経路中に減速機が設けられているため、効率が低下すると共に、装置全体をコンパクト化することが難しく、外観も悪くなるという不具合があった。
【0012】
本発明は、斯かる実情に鑑み、インバータ装置によって通電制御する永久磁石モータについてその制御を工夫することでコンベヤ駆動装置に利用し、搬送するワークの速度に対して、電動機の回転速度をマッチングさせ、且つ、必要回転力(トルク)の確保可能なダイレクトドライブ駆動装置として適用することで、少品種のモータに限定でき、部品点数を削減して納期の短縮化とコストダウンを図り得ると共に、効率を高めて省エネルギ化とコンパクト化を図ることができ、更に外観向上をも図り得るコンベヤ駆動装置を提供しようとするものである。
【課題を解決するための手段】
【0013】
本発明は、コンベヤの駆動軸をダイレクトドライブ方式で回転駆動する、三相電源がインバータ装置から供給され、回転軸に固定された永久磁石回転子とその周囲外側に位置するステータとからなるインナーロータ型の永久磁石同期モータを備えたコンベヤ駆動装置であって、
前記インバータ装置は、
前記永久磁石同期モータの回転数が1[rpm]から所定の第一回転数までの範囲は、前記ステータ各相の巻線に発生する誘起電圧に対して同位相の電流となるよう通電を行う第一運転範囲と、
前記永久磁石同期モータの回転数が所定の第一回転数から所定の第二回転数までの範囲は、前記ステータ各相の巻線に発生する誘起電圧に対して進み位相の電流となるよう通電を行う第二運転範囲とを切り替えることにより、
前記永久磁石同期モータが1[rpm]から所定の第二回転数の範囲内で略トルク一定となるよう構成したことを特徴とするコンベヤ駆動装置にかかるものである。
【0014】
前記コンベヤ駆動装置において、前記インバータ装置は、
前記ステータの巻線に誘起電圧を発生させる電流を通電する通電手段に配設された電流センサと、
該電流センサにより検出された電流信号を変換して、磁界と平行なd軸電流とこれに直交するq軸電流とに分離する電流変換手段と、
該電流変換手段から出力される前記d軸電流に関連した電流指令Idrに応じたd軸電圧、及び前記電流変換手段から出力される前記q軸電圧に関連した電流指令Iqrに応じたq軸電圧、にそれぞれ変換する電流制御手段と、
前記電流制御手段から出力されるd軸電圧及びq軸電圧を2相/3相変換して3相電圧信号を形成し、前記通電手段を介して各ステータ巻線に供給する直流電流のスイッチングを制御するPWM回路へ与える電圧変換手段とを有し、
前記第一運転範囲では、前記電流制御手段は、電流指令Iqrを必要回転数に応じて正方向に増加して出力し、且つ電流指令Idrはゼロ出力のままとし、
前記第二運転範囲では、前記電流制御手段は、電流指令Iqrに応じたq軸電圧が所定値になった時点から、電流指令Idrを負方向に推移させることで、前記ステータ各相の巻線に発生する誘起電圧に対して進み位相の電流となるようにすることができる。
【0015】
前記コンベヤ駆動装置においては、磁界と平行なd軸電流とこれに直交するq軸電流とに分離する前記電流変換手段から出力されるd軸電流とq軸電流と、更に前記d軸電圧とを入力する位置推定手段が、前記d軸電流と前記q軸電流と前記d軸電圧から、d軸方向の誘起電圧を演算し、更に、角周波数と回転位置とを決定する機能を備えることで、
前記永久磁石回転子の磁極位置を推定監視するインバータ装置を有するようにすることが好ましい。
【0016】
前記コンベヤ駆動装置においては、前記永久磁石回転子に固定された回転軸が中空のホローシャフトになっているようにすることができる。
【0017】
前記コンベヤ駆動装置において、前記永久磁石同期モータの前記所定の第一回転数は、100[rpm]から300[rpm]のいずれかの数値をとり、
前記永久磁石同期モータの前記所定の第二回転数は、300[rmp]から800[rpm]のいずれかの数値をとるようにすることもできる。
【0018】
前記コンベヤ駆動装置においては、単位長さ当りの搬送物重量の上限が50[kg/m]、
コンベヤ速度の上限が200[m/min]、
コンベヤ機長の上限が10[m]である一般物流用のコンベヤに適用することが有効となる。
【0019】
上記手段によれば、以下のような作用が得られる。
【0020】
前述の如く、コンベヤの駆動軸をダイレクトドライブ方式で回転駆動する、三相電源がインバータ装置から供給され、回転軸に固定された永久磁石回転子とその周囲外側に位置するステータとからなるインナーロータ型の永久磁石同期モータを備え、前記インバータ装置は、
前記永久磁石同期モータの回転数が1[rpm]から所定の第一回転数までの範囲は、前記ステータ各相の巻線に発生する誘起電圧に対して同位相の電流となるよう通電を行う第一運転範囲と、
前記永久磁石同期モータの回転数が所定の第一回転数から所定の第二回転数までの範囲は、前記ステータ各相の巻線に発生する誘起電圧に対して進み位相の電流となるよう通電を行う第二運転範囲とを切り替えることにより、
前記永久磁石同期モータが1[rpm]から所定の第二回転数の範囲内で略トルク一定となるよう構成すると、一般物流用のコンベヤであれば、該コンベヤの能力にかかわらず、一種類か二種類程度の容量の永久磁石同期モータで対応することが可能となり、減速機も不要となる。
【0021】
この結果、従来のコンベヤ駆動装置に比べて、容量の異なるモータ毎にそれぞれ減速比の異なる複数種類の減速機を必要としなくなるため、前記コンベヤの駆動部における構成部品も最小限で済み、部品点数が増えず納期が短くなると共に、コストアップも避けられる。
【0022】
又、前記永久磁石同期モータからコンベヤの駆動軸に至る回転力伝達経路中に減速機が設けられていないため、効率が良くなると共に、装置全体をコンパクト化することが可能となり、外観も良くなる。
【発明の効果】
【0023】
本発明のコンベヤ駆動装置によれば、部品点数を削減して納期の短縮化とコストダウンを図り得ると共に、効率を高めて省エネルギ化とコンパクト化を図ることができ、更に外観向上をも図り得るという優れた効果を奏し得る。
【図面の簡単な説明】
【0024】
【図1】本発明のコンベヤ駆動装置の実施例を示す概要構成図であって、ケーシングを一部切除して内部断面を示す図である。
【図2】本発明のコンベヤ駆動装置の実施例におけるインバータ装置を示すブロック図である。
【図3】図1のIII−III矢視図である。
【図4】本発明のコンベヤ駆動装置の実施例における永久磁石同期モータのトルクT及び回転速度Nを基とした各特性を示す線図である。
【図5】本発明のコンベヤ駆動装置の実施例における永久磁石同期モータの回転数−トルク特性を示す線図である。
【図6】本発明のコンベヤ駆動装置の実施例における永久磁石同期モータをコンベヤに装着した状態を示す斜視図である。
【図7】本発明のコンベヤ駆動装置の実施例における永久磁石同期モータをコンベヤに装着した状態を示す拡大斜視図である。
【発明を実施するための形態】
【0025】
以下、本発明の実施の形態を添付図面を参照して説明する。
【0026】
図1〜図7は本発明のコンベヤ駆動装置の実施例であって、コンベヤ1の駆動軸2をダイレクトドライブ方式で回転駆動する永久磁石同期モータ3を備えたコンベヤ駆動装置である。
【0027】
前記コンベヤ1は、例えば、ベルトコンベヤであって、その駆動軸2が頭部プーリに固定された駆動プーリ中心軸である場合でも良いし、前記コンベヤ1が、例えば、ローラコンベヤであり、並列されている駆動ローラの親に当たる駆動ローラの中心軸を駆動軸2として他の駆動ローラをタイミングベルトやチェーンを介して回転させるように連動する場合でも良いし、例えばその他の形式例として、チェーン駆動で駆動部を駆動する元のスプロケットの中心軸を駆動軸2としたコンベヤの場合等でも良い。いずれも、前記コンベヤ1の機側フレーム外側等から突出している駆動軸2を駆動する駆動源の技術である。
【0028】
前記永久磁石同期モータ3は、コンベヤ1の機側に設置しても可動部がむき出しのため触れると巻込み事故が発生するという問題のない、インナーロータ型の永久磁石同期モータ(一部の形式は一般にブラシレスDCモータといわれるものも含む)である。そして、この形式の永久磁石同期モータ3では、回転子表面に磁石が配置されたSPMモータ(Surface Permanent Magnet motor)、或いは回転子の中に磁石が埋め込まれたIPMモータ(Interior Permanent Magnet motor)として公知のものであるが、本実施例の場合、円筒状のケーシング4の軸線方向片端面のコンベヤ機側に近い方を覆うようにトルクアーム部5aが下部に突出する側板5が取り付けられ、前記ケーシング4の軸線方向もう片端面のコンベヤ機側から遠い方を覆うように側板6が取り付けられ、前記側板5の中心部に穿設された中心軸孔7aから、前記永久磁石同期モータ3の内部の回転子20の同心中心に固定されケーシング4に軸受22を介して回動自在に支持される中空軸(ホローシャフト)21の中央孔部7に前記コンベヤ1の駆動軸2を挿入し、図示していないキーを駆動軸2と中空軸21それぞれの溝に打ち込んで固定することにより、該コンベヤ1の駆動軸2をダイレクトドライブ方式で回転駆動するようになっている。尚、前記側板5の下方のトルクアーム部5aは、図3に示す如く、その張出部に穿設された係止孔8にボルト9を僅かな隙間をあけて挿入し、図7に示す如く、該ボルト9によりコンベヤ1側のフレームに固定することで、該コンベヤ1側のフレームに固定されたボルト9に対し係止孔8を介して係合されるようになっており、前記永久磁石同期モータ3が回転している際に、駆動軸2側のトルクに負けて該永久磁石同期モータ3自体が回転してしまうことを阻止し、且つ、前記永久磁石同期モータの始動時には、トルクアーム部5aの係止孔8とボルト9との隙間により、強大な始動トルクを一旦いなしてから回転させることで、駆動軸2側や永久磁石同期モータ3側の回転部分へ無理な力がかかるのを分散するようになっている。
【0029】
前記永久磁石同期モータ3は、モータ回転軸である中空軸21に固定された永久磁石回転子20と、その周囲外側に位置し各極毎に巻線23u、23v、23wを施すステータ24とからなるインナーロータ型である。永久磁石回転子20は、SPMモータとしての回転子表面に磁石が配置されたものでも、IPMモータとしての回転子の中に磁石が埋め込まれたものでもどちらでも適用可能である。
【0030】
前記永久磁石同期モータ3は、図1に示す如く、交流電源10に対し、インバータ装置11を介して接続されており、特に回転子20の回転位置を検知して位置信号を出力するホールIC等の物理的位置検知手段は設けられていない。
【0031】
前記インバータ装置11は、交流を直流に変換する直流電源回路13と、駆動用直流電流とスイッチング制御を行うマイクロコンピュータ15への制御電流とを分流する分圧回路36と、スイッチング素子等によりPWM(パルス幅変調)制御して通電するために備わり下流のケーブルを含んで通電手段を形成するインバータ主回路14と、駆動回路39を介してインバータ主回路14にPWM制御信号を送るマイクロコンピュータ15とを備え、該マイクロコンピュータ15において、モータ起動時のロータ位置を検知する位置信号として、通電手段に配設された電流センサで計測される電流値によって、前記回転子20のステータ24との位置関係を推定し、且つ、各ステータ24の各相と回転子20の永久磁石が形成する磁界による誘導電流の相との、位相の同期や進角も制御して通電波形データを読み出すことにより通電信号を形成するようになっており、該マイクロコンピュータ15からの通電信号に基づいて前記インバータ主回路14から永久磁石同期モータ3に通電するようになっている。
【0032】
前記永久磁石同期モータ3の中心軸21の回転数が1[rpm]から所定の第一回転数(例えば、100[rpm]から300[rpm]のいずれかの数値)までの範囲は、前記ステータ24各相の巻線23u、23v、23wに発生する誘起電圧に対して同位相の電流となるよう通電を行って低速高トルクのモータ運転を実現し、永久磁石同期モータ3の中心軸21の回転数が所定の第一回転数から所定の第二回転数(例えば、300[rmp]から800[rpm]のいずれかの数値)までの範囲は、前記ステータ24各相の巻線23u、23v、23wに発生する誘起電圧に対して進み位相の電流となるよう通電を行うことにより、高速低トルクのモータ運転を実現し、通して略一定のトルク運転ができるモータを提供している。
【0033】
前記永久磁石同期モータ3を備えたコンベヤ駆動装置の電気的構成について、図2を参照して説明する。この図2において、交流電源10の両端子は、一方にリアクトル30を介して全波整流回路31の入力端子に接続されている。全波整流回路31の出力端子間には、平滑コンデンサ32a、32bが接続されており、この平滑コンデンサ32a、32bと全波整流回路31とから直流電源回路13が構成されている。
【0034】
この直流電源回路13の出力端子から導出された直流母線33a、33b間には、定電圧回路35と分圧回路36とインバータ主回路14が接続されている。インバータ主回路14は、3相ブリッジ接続された例えばIGBTからなるスイッチング素子と、これらスイッチング素子にそれぞれ並列接続されたフリーホイールダイオードの6組の要素37とから構成されている。
【0035】
そして、インバータ主回路14の出力端子38u、38v、38wは、永久磁石同期モータ3の3相の巻線23u、23v、23wに接続されている。又、インバータ主回路14の各スイッチング素子の制御端子(ゲート)は、例えばフォトカプラからなる駆動回路39に接続されている。この駆動回路39はPWM回路40からの信号により制御されて上記各スイッチング素子をオンオフ制御するようになっている。
【0036】
これらインバータ主回路14、駆動回路39及び電源供給の出力端子38u、38v、38wまでのケーブルから通電手段41が構成されている。
【0037】
前記PWM回路40は、内部に所定周波数の三角波形信号を発生する手段を備えており、次に述べるマイクロコンピュータ15から与えられる通電信号Du、Dv、Dwと前記三角波形とを比較し、その比較結果を駆動信号Vup、Vun、Vvp、Vvn、Vwp、Vwnとして駆動回路39に出力するように構成されている。
【0038】
マイクロコンピュータ15は、通電信号Du、Dv、Dwとして例えば3相正弦波信号(8ビットの出力波形データ)Du、Dv、Dwを形成し、これら通電信号Du、Dv、Dwを内蔵するPWM回路40に与えるように構成されている。
【0039】
そして、上述の通電手段41と、マイクロコンピュータ15と、直流電源回路13とから、永久磁石同期モータ3を通電制御するインバータ装置11が構成されている。
【0040】
図1、図2において、通電手段41の出力線には、電流センサ16a、16bが配設されており、これら電流センサ16a、16bにより検出された電流信号Iu,Iwは電流変換手段42へ与えられる。この電流変換手段42は、電流信号Iu,Iwを3相/2相変換を行って、磁界と平行な電流Idとこれに直交する電流Iqとに分離し、これら電流Id、Iqを位置推定手段43と電流制御手段44へ与える。
【0041】
前記電流制御手段44は、通電制御手段45から出力される電流指令Idr,Iqrと前記電流Id,Iqを受けて、電流Id,Iqと電流指令Idr,Iqrがそれぞれ一致するように電圧Vd,Vqを決定し、これら電圧Vd,Vqを電圧変換手段46へ出力するように構成されている。そして、電圧変換手段46は、電圧Vd,Vqを2相/3相変換して3相電圧信号Du,Dv,Dwを形成し、これらをPWM回路40へ与えるようになっている。
【0042】
又、位置センサを省略して永久磁石同期モータ3を駆動するように構成しており、そのために、位置推定手段43を備えている。この位置推定手段43は、電流Id,Iqと電圧Vdを入力して、これらに基づいて次の数式によりd軸方向の誘起電圧Edを計算する機能を有している。
[数2]
Ed=Vd−RId+ωLIq
但し、R:巻線抵抗
L:インダクタンス
ω:角周波数
【0043】
更に、位置推定手段43は、次の数式によって角周波数ωと回転位置Θを決定する機能を有しており、角周波数ωを通電制御手段45へ与え、回転位置Θを電流変換手段42と電圧変換手段46とに与えるように構成されている。
[数3]
ω=ω−KEd
Θ=∫ωdt
但し、K:ゲイン定数
【0044】
次に、上記構成の作用、特にステータ24各相の巻線23u、23v、23wに発生する誘起電圧に対して同位相の電流となるよう通電を行う第一運転範囲の永久磁石同期モータ3の通電制御の動作について図4を参照して説明する。第一運転範囲の運転において、モータ3を始動する場合、マイクロコンピュータ15の通電制御手段45は、電流指令Iqrをゼロから徐々に増加させる。そして、電流変換手段42、電流制御手段44、電圧変換手段46の作用により、電流Iqが電流指令Iqrに一致するように、3相電圧信号Vu,Vv、Vwが形成され、PWM回路40へ出力される。これにより、通電手段41によってモータ3が通電され、モータ3が始動し、所定の第一回転数を下回る設定回転数になるまで加速されてその後一定運転する。このとき、電流指令Idrは、ゼロに設定されている。これが図4における区間Aである。
【0045】
ここで、通電制御手段45は、電流指令Idrを次のようにして決定するように構成されている。即ち、電圧振幅演算回路47からの電圧信号Vaと分圧回路36からの直流電圧信号DCVを比較して、
Va≧DCVのとき、電流指令Idr=Idr−x
Va<DCVのとき、電流指令Idr=Idr+x
としている。但し、電流指令Idr≦0である。
【0046】
又、電圧振幅演算回路47は、電流制御手段42からの電圧Vd,Vqに基づいて出力電圧の線間振幅電圧Vaを演算する機能を有しており、この線間振幅電圧Vaを通電制御手段45へ与える。そして、通電制御手段45は、上記線間振幅電圧Va、分圧回路36からの直流電圧信号DCV、位置推定手段43からの角周波数(回転数情報)ω等の信号が与えられるように構成されている。
【0047】
続いて、前記ステータ24各相の巻線23u、23v、23wに発生する誘起電圧に対して進み位相の電流となるよう通電を行う第二運転範囲の永久磁石同期モータ3の通電制御の動作について図4を参照して説明する。
【0048】
第一回転数を超えて、モータ3の回転速度をさらに増加させる場合、電圧信号Vaと直流電圧信号DCVとが略一致した時点(これが第一回転数)を超えると、電流指令Idrを負方向に推移させ始める。図4の区間Bに示すように、設定回転速度(例えば、800[rpm])に達するまでの間、電流指令Idrを負方向に推移させる。この場合、電流が誘起電圧に対して進み位相状態、即ち、弱め界磁状態となっている。
【0049】
上記のように、本実施例の場合、永久磁石同期モータの回転数が1[rpm]から所定の第一回転数までの範囲は、前記ステータ24各相の巻線23u、23v、23wに発生する誘起電圧に対して同位相の電流となるよう通電を行う第一運転範囲と、前記永久磁石同期モータの回転数が所定の第一回転数から所定の第二回転数までの範囲は、前記ステータ24各相の巻線23u、23v、23wに発生する誘起電圧に対して進み位相の電流となるよう通電を行う第二運転範囲とを切り替えることにより、該永久磁石同期モータ3が所定の回転数範囲内でトルク一定となるよう構成した点を特徴としている。
【0050】
このように構成した理由は、本発明者の研究の結果、単位長さ当りの搬送物重量の上限が50[kg/m]、コンベヤ速度の上限が200[m/min]、コンベヤ機長の上限が10[m]である一般物流用のコンベヤの場合、下記の[表1]に示されるように、所定の回転数範囲内でトルク一定となるモータであれば、従来のように、複数種類の容量のモータを用意する必要がなくなることが判明したためである。
【表1】
【0051】
即ち、前記永久磁石同期モータ3の各相の巻線23u、23v、23wに発生する誘起電圧に対して進み位相となるよう通電を行えば、図5に示す如く、該永久磁石同期モータ3が所定の回転数範囲内でトルク一定となるよう構成することが可能となる。
【0052】
次に、上記実施例の作用を説明する。
【0053】
前述の如く、コンベヤ1の駆動軸2をダイレクトドライブ方式で回転駆動する、三相電源がインバータ装置11から供給され、中空軸21に固定された永久磁石回転子20とその周囲外側に位置するステータ24とからなるインナーロータ型の永久磁石同期モータ3を備え、前記インバータ装置11は、前記永久磁石同期モータ3の回転数が1[rpm]から所定の第一回転数までの範囲は、前記ステータ24各相の巻線23u、23v、23wに発生する誘起電圧に対して同位相の電流となるよう通電を行う第一運転範囲と、前記永久磁石同期モータ3の回転数が所定の第一回転数から所定の第二回転数までの範囲は、前記ステータ24各相の巻線23u、23v、23wに発生する誘起電圧に対して進み位相の電流となるよう通電を行う第二運転範囲とを切り替えることにより、前記永久磁石同期モータ3が1[rpm]から所定の第二回転数の範囲内で略トルク一定となるよう構成すると、一般物流用のコンベヤ1であれば、該コンベヤ1の能力にかかわらず、一種類か二種類程度の容量の永久磁石同期モータ3で対応することが可能となり、減速機も不要となる。
【0054】
この結果、従来のコンベヤ駆動装置に比べて、容量の異なるモータ毎にそれぞれ減速比の異なる複数種類の減速機を必要としなくなるため、前記コンベヤの駆動部における構成部品も最小限で済み、部品点数が増えず納期が短くなると共に、コストアップも避けられる。
【0055】
又、前記永久磁石同期モータ3からコンベヤの駆動軸に至る回転力伝達経路中に減速機が設けられていないため、効率が良くなると共に、図6に示す如く、装置全体をコンパクト化することが可能となり、外観も良くなる。
【0056】
因みに、インバータ入力電源を200[V]−50[Hz]とし、インバータ出力周波数を50[Hz]とした電源条件のもと、0.4[kW]の永久磁石同期モータ3(本発明)と、0.4[kW]のインダクションモータ(従来)とを用いた負荷試験を行ったところ、試験結果は下記の[表2]に示されるようなものとなり、効率が約20[%]向上することが確認された。
【表2】
【0057】
こうして、部品点数を削減して納期の短縮化とコストダウンを図り得ると共に、効率を高めて省エネルギ化とコンパクト化を図ることができ、更に外観向上をも図り得る。
【0058】
尚、本発明のコンベヤ駆動装置は、上述の実施例にのみ限定されるものではなく、本発明の要旨を逸脱しない範囲内において種々変更を加え得ることは勿論である。
【符号の説明】
【0059】
1 コンベヤ
2 駆動軸
3 永久磁石同期モータ
10 交流電源
11 インバータ装置
12 ロータ位置検知手段
13 直流電源回路
14 インバータ回路
15 マイクロコンピュータ
【特許請求の範囲】
【請求項1】
コンベヤの駆動軸をダイレクトドライブ方式で回転駆動する、三相電源がインバータ装置から供給され、回転軸に固定された永久磁石回転子とその周囲外側に位置するステータとからなるインナーロータ型の永久磁石同期モータを備えたコンベヤ駆動装置であって、
前記インバータ装置は、
前記永久磁石同期モータの回転数が1[rpm]から所定の第一回転数までの範囲は、前記ステータ各相の巻線に発生する誘起電圧に対して同位相の電流となるよう通電を行う第一運転範囲と、
前記永久磁石同期モータの回転数が所定の第一回転数から所定の第二回転数までの範囲は、前記ステータ各相の巻線に発生する誘起電圧に対して進み位相の電流となるよう通電を行う第二運転範囲とを切り替えることにより、
前記永久磁石同期モータが1[rpm]から所定の第二回転数の範囲内で略トルク一定となるよう構成したことを特徴とするコンベヤ駆動装置。
【請求項2】
前記インバータ装置は、
前記ステータの巻線に誘起電圧を発生させる電流を通電する通電手段に配設された電流センサと、
該電流センサにより検出された電流信号を変換して、磁界と平行なd軸電流とこれに直交するq軸電流とに分離する電流変換手段と、
該電流変換手段から出力される前記d軸電流に関連した電流指令Idrに応じたd軸電圧、及び前記電流変換手段から出力される前記q軸電圧に関連した電流指令Iqrに応じたq軸電圧、にそれぞれ変換する電流制御手段と、
前記電流制御手段から出力されるd軸電圧及びq軸電圧を2相/3相変換して3相電圧信号を形成し、前記通電手段を介して各ステータ巻線に供給する直流電流のスイッチングを制御するPWM回路へ与える電圧変換手段とを有し、
前記第一運転範囲では、前記電流制御手段は、電流指令Iqrを必要回転数に応じて正方向に増加して出力し、且つ電流指令Idrはゼロ出力のままとし、
前記第二運転範囲では、前記電流制御手段は、電流指令Iqrに応じたq軸電圧が所定値になった時点から、電流指令Idrを負方向に推移させることで、前記ステータ各相の巻線に発生する誘起電圧に対して進み位相の電流となることを特徴とする請求項1記載のコンベヤ駆動装置。
【請求項3】
磁界と平行なd軸電流とこれに直交するq軸電流とに分離する前記電流変換手段から出力されるd軸電流とq軸電流と、更に前記d軸電圧とを入力する位置推定手段が、前記d軸電流と前記q軸電流と前記d軸電圧から、d軸方向の誘起電圧を演算し、更に、角周波数と回転位置とを決定する機能を備えることで、
前記永久磁石回転子の磁極位置を推定監視するインバータ装置を有することを特徴とする請求項1又は2記載のコンベヤ駆動装置。
【請求項4】
前記永久磁石回転子に固定された回転軸が中空のホローシャフトになっていることを特徴とする請求項1〜3のいずれか一つに記載のコンベヤ駆動装置。
【請求項5】
前記永久磁石同期モータの前記所定の第一回転数は、100[rpm]から300[rpm]のいずれかの数値をとり、
前記永久磁石同期モータの前記所定の第二回転数は、300[rmp]から800[rpm]のいずれかの数値をとることを特徴とする請求項1〜4のいずれか一つに記載のコンベヤ駆動装置。
【請求項6】
単位長さ当りの搬送物重量の上限が50[kg/m]、
コンベヤ速度の上限が200[m/min]、
コンベヤ機長の上限が10[m]である一般物流用のコンベヤに適用するようにした請求項1〜5のいずれか一つに記載のコンベヤ駆動装置。
【請求項1】
コンベヤの駆動軸をダイレクトドライブ方式で回転駆動する、三相電源がインバータ装置から供給され、回転軸に固定された永久磁石回転子とその周囲外側に位置するステータとからなるインナーロータ型の永久磁石同期モータを備えたコンベヤ駆動装置であって、
前記インバータ装置は、
前記永久磁石同期モータの回転数が1[rpm]から所定の第一回転数までの範囲は、前記ステータ各相の巻線に発生する誘起電圧に対して同位相の電流となるよう通電を行う第一運転範囲と、
前記永久磁石同期モータの回転数が所定の第一回転数から所定の第二回転数までの範囲は、前記ステータ各相の巻線に発生する誘起電圧に対して進み位相の電流となるよう通電を行う第二運転範囲とを切り替えることにより、
前記永久磁石同期モータが1[rpm]から所定の第二回転数の範囲内で略トルク一定となるよう構成したことを特徴とするコンベヤ駆動装置。
【請求項2】
前記インバータ装置は、
前記ステータの巻線に誘起電圧を発生させる電流を通電する通電手段に配設された電流センサと、
該電流センサにより検出された電流信号を変換して、磁界と平行なd軸電流とこれに直交するq軸電流とに分離する電流変換手段と、
該電流変換手段から出力される前記d軸電流に関連した電流指令Idrに応じたd軸電圧、及び前記電流変換手段から出力される前記q軸電圧に関連した電流指令Iqrに応じたq軸電圧、にそれぞれ変換する電流制御手段と、
前記電流制御手段から出力されるd軸電圧及びq軸電圧を2相/3相変換して3相電圧信号を形成し、前記通電手段を介して各ステータ巻線に供給する直流電流のスイッチングを制御するPWM回路へ与える電圧変換手段とを有し、
前記第一運転範囲では、前記電流制御手段は、電流指令Iqrを必要回転数に応じて正方向に増加して出力し、且つ電流指令Idrはゼロ出力のままとし、
前記第二運転範囲では、前記電流制御手段は、電流指令Iqrに応じたq軸電圧が所定値になった時点から、電流指令Idrを負方向に推移させることで、前記ステータ各相の巻線に発生する誘起電圧に対して進み位相の電流となることを特徴とする請求項1記載のコンベヤ駆動装置。
【請求項3】
磁界と平行なd軸電流とこれに直交するq軸電流とに分離する前記電流変換手段から出力されるd軸電流とq軸電流と、更に前記d軸電圧とを入力する位置推定手段が、前記d軸電流と前記q軸電流と前記d軸電圧から、d軸方向の誘起電圧を演算し、更に、角周波数と回転位置とを決定する機能を備えることで、
前記永久磁石回転子の磁極位置を推定監視するインバータ装置を有することを特徴とする請求項1又は2記載のコンベヤ駆動装置。
【請求項4】
前記永久磁石回転子に固定された回転軸が中空のホローシャフトになっていることを特徴とする請求項1〜3のいずれか一つに記載のコンベヤ駆動装置。
【請求項5】
前記永久磁石同期モータの前記所定の第一回転数は、100[rpm]から300[rpm]のいずれかの数値をとり、
前記永久磁石同期モータの前記所定の第二回転数は、300[rmp]から800[rpm]のいずれかの数値をとることを特徴とする請求項1〜4のいずれか一つに記載のコンベヤ駆動装置。
【請求項6】
単位長さ当りの搬送物重量の上限が50[kg/m]、
コンベヤ速度の上限が200[m/min]、
コンベヤ機長の上限が10[m]である一般物流用のコンベヤに適用するようにした請求項1〜5のいずれか一つに記載のコンベヤ駆動装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−106478(P2013−106478A)
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願番号】特願2011−250094(P2011−250094)
【出願日】平成23年11月15日(2011.11.15)
【出願人】(000001834)三機工業株式会社 (316)
【Fターム(参考)】
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願日】平成23年11月15日(2011.11.15)
【出願人】(000001834)三機工業株式会社 (316)
【Fターム(参考)】
[ Back to top ]