
ステージ装置、手ぶれ補正装置及びステージ装置の駆動方法
【課題】特にステージ装置、ぶれ補正装置の擦動部に付着した塵等を確実に払拭できるステージ装置、ぶれ補正装置およびその駆動方法を提供する。
【解決手段】CCD45が搭載され、X方向駆動用コイルCX、Y方向駆動用コイルCYA、CYBが形成された可動部50をベースヨーク板31と駆動用ヨーク板32との間に保持し、可動部50の表裏面に形成された平滑面40a、41aを擦動自在に挟圧する押しピン63と基板支持突起65により直線および回動移動自在に支持したステージ装置において、可動部50をその可動範囲中心から発散する渦状軌跡を描いて運動させる渦状信号をコイルCX、CYA、CYBに出力する渦状駆動信号源83を備えた。
【解決手段】CCD45が搭載され、X方向駆動用コイルCX、Y方向駆動用コイルCYA、CYBが形成された可動部50をベースヨーク板31と駆動用ヨーク板32との間に保持し、可動部50の表裏面に形成された平滑面40a、41aを擦動自在に挟圧する押しピン63と基板支持突起65により直線および回動移動自在に支持したステージ装置において、可動部50をその可動範囲中心から発散する渦状軌跡を描いて運動させる渦状信号をコイルCX、CYA、CYBに出力する渦状駆動信号源83を備えた。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ステージ装置、手ぶれ補正装置およびその駆動方法、より詳細には可動部分に不着した塵埃などの除去、払拭駆動ができるステージ装置、手ぶれ補正装置及びその駆動方法に関する。
【背景技術】
【0002】
撮像素子を移動させて手ぶれ補正する従来の手ぶれ補正装置の主力方式であるXYガイド擦動駆動方式の場合、装置内に付着した塵等を、XY擦動方向に沿って個別に直進交番励振して払拭させる方法が知られている(特許文献1)。
【0003】
さらに撮像素子を移動させて手ぶれ補正する手ぶれ補正装置として、光軸に対して直交するXY方向だけでなく、XY平面内で回転させる回転方向の手ぶれも補正する、いわゆる無ガイド方式の手ぶれ補正装置が知られている(特許文献2)。この無ガイド方式の手ぶれ補正装置では、撮像素子が光軸と直交するXY平面内において自由に移動及び回転できるように、撮像素子の前後方向から支持部材によって面と面で擦動自在に挟持されている。
【特許文献1】特許第3044067号公報
【特許文献2】特開2005‐316222号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
XYガイド擦動駆動方式のぶれ補正装置の場合、擦動部分、すなわち、XYガイド部材は一般的に円柱状シャフト形状であり、その表面に塵が付着したとしても、XY方向の擦動により塵を除去することが可能である。
しかしながら、無ガイド方式のぶれ補正装置の場合、擦動部分は、撮像素子が載置されている可動体の擦動面であり、単純なXY駆動では、十分な塵の除去ができず、可動範囲における擦動面全体に対して付着した塵を除去する駆動を行う必要性がある。無ガイド方式のぶれ補正装置の場合は、塵などがぶれ補正装置の擦動部に付着すると、擦動摩擦の増大や引っかかりが発生し、滑らかな移動制御ができなくなり、ぶれ補正性能の低下や動作不良を生じるおそれがあり、XYガイド擦動駆動方式のぶれ補正装置の場合よりも、確実かつ広範囲にわたって塵の除去動作を行わなければならない。
【0005】
本発明は、従来の挟持擦動方式に手ぶれ補正装置の問題に鑑みてなされたものであって、特にステージ装置、ぶれ補正装置の擦動部に付着した塵等を確実に払拭できるステージ装置、ぶれ補正装置およびその駆動方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明のステージ装置は、固定支持基板と、上記固定支持基板に対して所定間隔で平行に配置されたステージ板と、上記ステージ板の表裏に形成された平行平滑面を擦動自在に表裏側から挟圧して該ステージ板を基準平面内において任意の方向に移動自在に支持する擦動支持手段と、上記固定支持基板と上記ステージ板とに装着された、上記ステージ板を所望の方向に移動させる駆動手段と、この駆動手段を、上記ステージ板がその可動範囲内において可動中心の周りを周回する移動軌跡を描いて運動するように制御する制御手段とを備えたことに特徴を有する。
【0007】
ステージ板にはその両面に平行平滑面が形成され、上記擦動支持手段は、一方が固定され、他方が弾性的に付勢された部材によって上記平行平滑面を摺動自在に挟圧する。
【0008】
より実際的には上記駆動手段は、上記固定支持基板と上記ステージ板の一方に装着された少なくとも2個の磁束発生部材、および他方に装着された、上記各磁束発生部材が発生する磁束を受けて上記基準平面内において異なる方向に駆動力を発生する2個の駆動用コイルを備えていて、上記制御手段は、上記各駆動用コイルに同時に所定周期の駆動信号を出力して上記ステージをその可動中心の周りを周回する移動軌跡を描いて運動させる。
【0009】
上記磁束発生部材は、直交する方向に配置されたX方向永久磁石とY方向永久磁石とを備え、上記駆動用コイルは、上記X方向永久磁石とY方向永久磁石と対向配置されたX用駆動コイルとY用駆動コイルを備えることが好ましい。
【0010】
上記移動軌跡は、上記ステージ板が可動範囲の中心から発散する渦状に周回する渦状の軌跡、またはステージ板の可動範囲の中心を周回する円状の軌跡とすることが好ましい。
【0011】
本発明の手ぶれ補正装置は、固定支持基板と、上記固定支持基板に対して所定間隔で平行に配置されたステージ板と、上記ステージ板の表裏に形成された平行平滑面を擦動自在に表裏側から挟圧して該ステージ板を基準平面内において任意の方向に移動自在に支持する擦動支持手段と、上記ステージ板に装着された撮像手段と、上記固定支持基板と上記ステージ板とに装着された、上記ステージ板を所望の方向に移動させる駆動手段と、搭載された機器の振動を検出する振動検出手段と、該振動検出手段の検出結果に基づいて、上記機器の結像光学系によって上記撮像手段に形成された被写体像のぶれが減少するように上記駆動手段をぶれ補正駆動するぶれ補正駆動制御手段と、上記ぶれ補正駆動とは別個に、上記ステージ板がその可動範囲の中心を周回する移動軌跡を描いて運動するように上記駆動手段を駆動する塵除去駆動制御手段とを備えたことに特徴を有する。
【0012】
ステージ板にはその両面に平行平滑面が形成され、上記擦動支持手段は、一方が固定され、他方が弾性的に付勢された部材によって上記平行平滑面を摺動自在に挟圧する。
【0013】
好ましくは、上記駆動手段は、上記固定支持基板と上記ステージ板の一方に装着された少なくとも2個の磁束発生部材、および他方に装着された、上記各磁束発生部材が発生する磁束を受けて上記基準平面内において異なる方向に駆動力を発生する2個の駆動用コイルを備えていて、上記塵除去駆動制御手段は、上記各駆動コイルに同時に所定周期の渦状駆動信号を出力して上記ステージ板をその可動範囲の中心の周りを周回する移動軌跡を描いて運動させる。
【0014】
より実際的には、上記磁束発生部材は、直交する方向に配置されたX方向永久磁石とY方向永久磁石とを備え、上記駆動用コイルは、上記X方向永久磁石とY方向永久磁石に対向配置されたX用駆動コイルとY用駆動コイルを備えていて、上記塵除去駆動制御手段は、上記各X用駆動コイルおよびY用駆動コイルに所定周期の駆動信号を出力して上記ステージをその可動範囲の中心の周りを周回する移動軌跡を描いて運動させる。
【0015】
上記ぶれ補正手段は、カメラの撮像光学系によって上記撮像手段に形成された被写体像のぶれが減少するように上記X用駆動コイル及びY用駆動コイルに通電して上記ステージ板を運動させ、上記塵除去駆動制御手段は、上記ステージ板が周回状の軌跡を描いて運動するように上記X用駆動コイル及びY用駆動コイルに通電する渦状駆動信号源を備え、上記X用駆動コイル及びY用駆動コイルへの通電を上記ぶれ補正装置と上記渦状駆動信号源との間で切り換える切換手段とを備え、上記制御手段は、上記切換手段を、上記塵除去制御するときに上記渦状駆動信号源に切り換えることが好ましい。
【0016】
上記移動軌跡は、上記ステージ板が可動範囲の中心から発散する渦状に周回する渦状の軌跡、または上記ステージ板の可動範囲の中心を周回する円状の軌跡が好ましい。
【0017】
上記渦状の軌跡の径方向ピッチは、上記ステージ板に擦動自在に接触してステージ板を運動自在に支持する部材の直径の半分以下であることが好ましい。
【0018】
上記塵除去駆動制御手段は、上記塵除去動作開始時に上記ステージ板をその可動中心位置に移動させ、上記塵除去動作終了後、上記ステージ板を可動範囲の中心に移動させることが好ましい。
【0019】
上記塵除去駆動制御手段は、搭載されたカメラの電源がオンされたとき、露光直前、可動ミラーアップ動作中、あるいは露光終了後、または所定のスイッチ操作を受けたときに上記塵除去動作を所定時間実行することが好ましい。
【0020】
本発明のステージ装置の駆動方法は、固定支持基板に対して所定間隔で平行に配置され、かつ基準平面内において移動自在に支持されたステージ板を備えたステージ装置の駆動方法であって、上記ステージ板を、その可動範囲の中心を周回する移動軌跡を描いて運動させること、に特徴を有する。
【発明の効果】
【0021】
本発明のステージ装置によれば、駆動手段を、上記ステージ板がその可動範囲の中心を周回する移動軌跡を描いて運動するように駆動するので、ステージ板に付着した塵埃などがステージ板の外方に払われて、動作不良の原因となる塵埃などが除去される。
【0022】
本発明のぶれ補正装置によれば、撮像素手段が搭載されたステージ板が、その可動範囲の中心を周回する移動軌跡を描いて運動するので、ステージ板に付着した塵埃などがステージ板の外方に払われて、動作不良の原因となる塵埃などが除去される。
搭載されたカメラの電源がオンされたとき、露光直前、可動ミラーアップ動作中、あるいは露光終了後、または所定のスイッチ操作を受けたとき等に塵除去運動を繰り返すことにより、塵等を確実に払拭することができる。
【発明を実施するための最良の形態】
【0023】
以下、添付図面を参照して本発明の一実施形態について説明する。以下の説明では図1及び図2の矢線で示すように、カメラボディ11(手ぶれ補正装置30)の左右方向をX方向、上下方向をY方向、前後方向をZ方向と定義する。
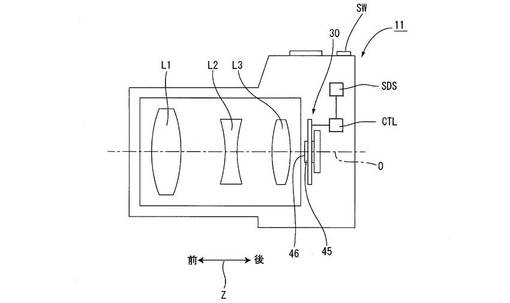
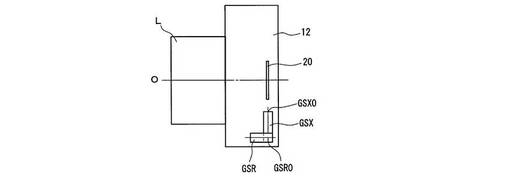
図1に示すように、カメラボディ11(レンズ鏡筒)内には、複数のレンズL1、L2、L3からなる光学系が配設されており、レンズL3の後方には手ぶれ補正装置(ステージ装置)30が配設されている。
【0024】
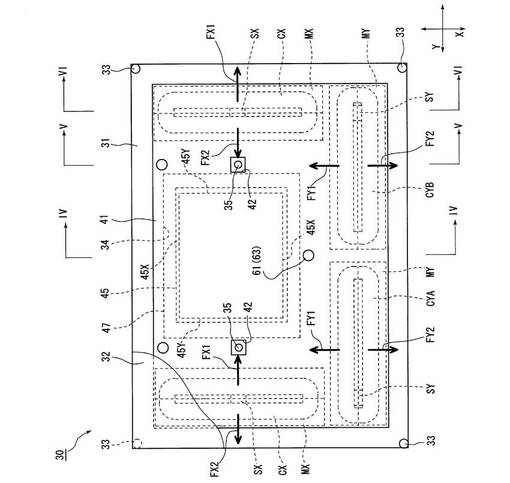
手ぶれ補正装置30は図2から図8に示す構造である。
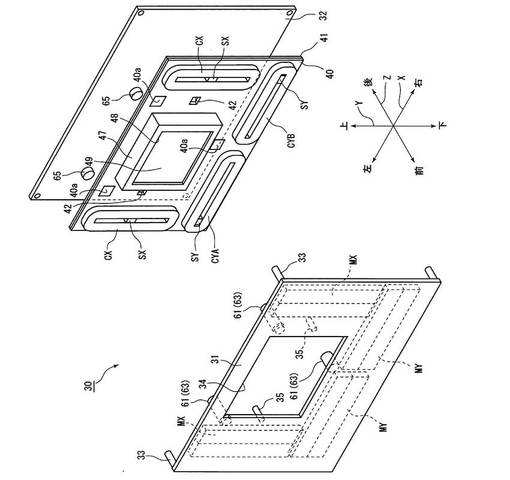
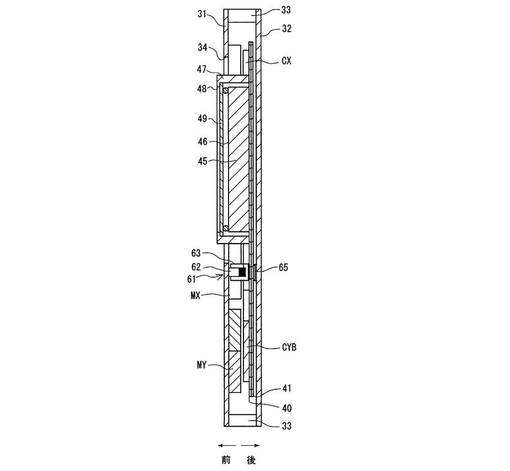
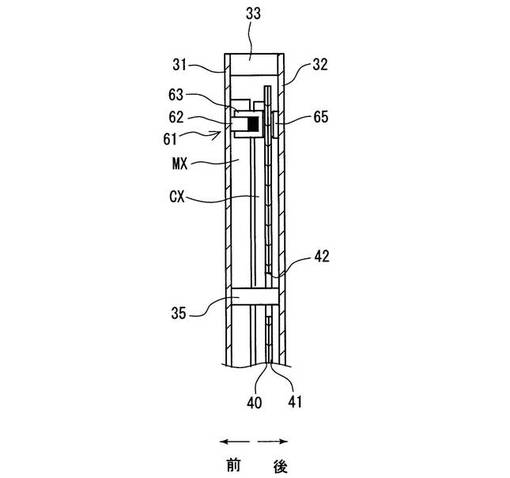
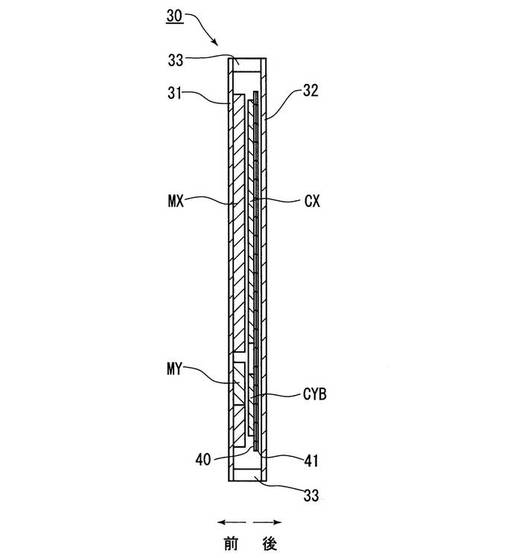
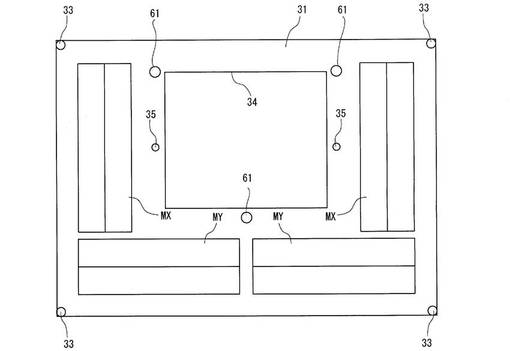
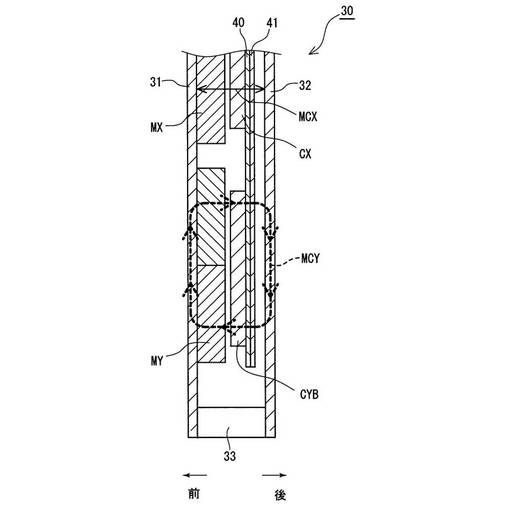
図2から図8に示すように手ぶれ補正装置30は、軟鉄等の磁性体からなる、外形が正面視横長方形のベースヨーク板31と、正面形状がベースヨーク板31と同一で軟鉄等の磁性体からなりベースヨーク板31の後方に位置する駆動用ヨーク板32と、を備えている。ベースヨーク板31の後面(裏面)の四隅には後方に向かって延出する4本の円柱形状の支柱33が突設されており、各支柱33の後端面が駆動用ヨーク板32の前面(表面)の四隅に固着されている。ベースヨーク板31と駆動用ヨーク板32は互いに平行に、所定間隔で固定されている。ベースヨーク板31の前面は、図示を省略した固定ねじによってカメラボディ内面に固定されている。
【0025】
ベースヨーク板31の中央部には方形開口34が穿設されている。ベースヨーク板31の後面の方形開口34の両側部には、2本の円柱形状をなす可動範囲規制ピン(可動範囲規制手段)35が後方に延びるように突設されており、左右の可動範囲規制ピン35の後端面は駆動用ヨーク板32の前面に固着されている。
【0026】
ベースヨーク板31の後面の左右両端部には、S極とN極がX方向に並ぶX用永久磁石MXがそれぞれ固定されている。これら左右のX用永久磁石MXは互いにX方向に並んでおり、両者のY方向位置は一致している。そして、ベースヨーク板31及び駆動用ヨーク板32がX用永久磁石MXの磁束を通すことにより、ベースヨーク板31及び左右のX用永久磁石MXと駆動用ヨーク板32との間にX方向駆動用高磁束密度空間MCXが形成されている(図8参照)。図示は省略してあるが、もう一方のX用永久磁石MX側にも同様にX方向駆動用高磁束密度空間MCXが形成されている。
【0027】
一方、ベースヨーク板31の後面の下端部には、S極とN極がY方向に並ぶ一対のY用永久磁石MYが固定されている。これら左右のY用永久磁石MYは互いにX方向に並んでおり、両者のY方向位置は一致している。そして、図8に示すように、ベースヨーク板31及び駆動用ヨーク板32が左右のY用永久磁石MYの磁束を通すことにより、ベースヨーク板31及び左右のY用永久磁石MYと駆動用ヨーク板32の間にY方向駆動用高磁束密度空間MCYが形成されている(図示は省略してあるが、もう一方のY用永久磁石MY側にも同様にY方向駆動用高磁束密度空間MCYが形成されている)。
【0028】
ベースヨーク板31と駆動用ヨーク板32の間には、ベースヨーク板31及び駆動用ヨーク板32と平行な平板状の電気基板(ステージ板)40が位置している。電気基板40の後面(裏面)には、正面形状が電気基板40と同一の補強板(ステージ板)41が固着され、電気基板40と補強板41が一体化している。電気基板40及び補強板41には、これらをZ方向に貫通する左右一対の可動範囲規制孔(可動範囲規制手段)42が穿設されている。左右の可動範囲規制孔42は共に方形孔であり、左右の可動範囲規制孔42を左右の可動範囲規制ピン35がそれぞれ貫通している。電気基板40及び補強板41は、図3に示す初期位置からベースヨーク板31に対してX方向とY方向を含むXY平面上を移動可能(直線移動だけでなく回転も可能)であるが、電気基板40及び補強板41のXY平面上の可動範囲は、左右の可動範囲規制ピン35及び可動範囲規制孔42によって制限される。
【0029】
電気基板40の前面(表面)中央部には、撮像素子としてのCCD45が固着されている。図3に示すようにCCD45は正面視で長方形をなし、かつ、図3において(電気基板40が初期位置にあるとき)X方向と平行をなす上下一対のX方向側辺45Xと、図3においてY方向と平行をなす左右一対のY方向側辺45Yとを具備している。CCD45の前面は光軸Oに対して直交する撮像面46であり、電気基板40が初期位置にあるときに撮像面46の中心が光軸O上に位置する。
【0030】
電気基板40の前面には、CCD45を囲むCCDホルダ47が固着されている。図4に示すように、CCDホルダ47の前端部は方形開口34を通ってベースヨーク板31の前方に突出している。CCDホルダ47の前壁には窓孔48が穿設されている。そして、CCDホルダ47の前壁とCCD45の間には光学ローパスフィルタ49が嵌合固定されており、光学ローパスフィルタ49とCCDホルダ47の前壁の間は気密状態に保たれている。CCD45の撮像面46は、レンズL1〜L3と光学ローパスフィルタ49を透過した像が結像する結像面である。
【0031】
電気基板40の前面には、CCDホルダ47を挟んで左右両端部に、同一仕様のX方向駆動用コイル(駆動部)CXが固着されている。X方向駆動用コイルCXはコイル線が百回以上渦巻き状に巻かれた(電気基板40と平行な方向にも電気基板40の板厚方向にも巻かれている)XY平面と平行なコイルであり、左右のX方向駆動用コイルCX同士はX方向側辺45Xと平行な方向(図3においてX方向)に並んでいる。別言すると、左右のX方向駆動用コイルCX同士のY方向側辺45Yと平行な方向の位置(図3においてはY方向の位置)は一致している。左右のX方向駆動用コイルCXは電気基板40及び補強板41がいずれの位置に移動しても、左右のX用永久磁石MXとZ方向に対向する(左右のX方向駆動用高磁束密度空間MCX内に位置する)。このX方向駆動用コイルCXと、ベースヨーク板31、駆動用ヨーク板32、及びX用永久磁石MXによってX方向駆動手段が構成されている。
【0032】
さらに電気基板40の前面には、左右のX方向駆動用コイルCXの中心部に位置するホール素子SXがそれぞれ固着されている。これらのホール素子SXは、対応するX方向駆動用高磁束密度空間MCXの磁束密度分布を利用して左右のX方向駆動用コイルCXのX方向位置をそれぞれ検出する。
【0033】
電気基板40の前面の下端部には、互いに同一仕様のY方向駆動用コイル(駆動部)CYAとY方向駆動用コイル(駆動部)CYBが固着されている。Y方向駆動用コイルCYAとY方向駆動用コイルCYBは共にコイル線が百回以上渦巻き状に巻かれた(電気基板40と平行な方向にも電気基板40の板厚方向にも巻かれている)XY平面と平行なコイルであり、Y方向駆動用コイルCYAとY方向駆動用コイルCYBは下側のX方向側辺45Xに沿って並んでいる(図3においてはX方向に並んでいる)。別言すると、Y方向駆動用コイルCYAとY方向駆動用コイルCYBのY方向側辺45Yと平行な方向の位置(図3におけるY方向位置)は一致している。Y方向駆動用コイルCYAとY方向駆動用コイルCYBは電気基板40及び補強板41がいずれの位置に移動しても、左右のY用永久磁石MYとZ方向に対向する(左右のY方向駆動用高磁束密度空間MCY内に位置する)。このY方向駆動用コイルCYA及びY方向駆動用コイルCYBと、ベースヨーク板31、駆動用ヨーク板32、及びY用永久磁石MYによってY方向駆動手段が構成されている。
【0034】
さらに電気基板40の前面には、Y方向駆動用コイルCYAとY方向駆動用コイルCYBの内部にそれぞれ位置する一対のホール素子SYがそれぞれ固着されている。これらのホール素子SYは、対応するY方向駆動用高磁束密度空間MCYの磁束密度分布を利用して、対応するY方向駆動用コイルCYA、CYBのY方向位置をそれぞれ検出する。
【0035】
上述したX方向駆動用コイルCX、Y方向駆動用コイルCYA、Y方向駆動用コイルCYB、ホール素子SX及びホール素子SYはすべて、カメラに内蔵されたCPU等によって構成される制御手段CTL(図1参照)に電気的に接続されている。
【0036】
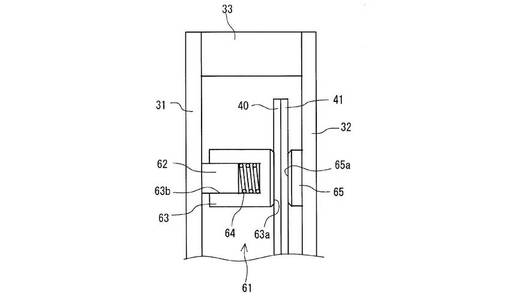
さらに、ベースヨーク板31の後面には、方形開口34の外方であって、方形開口34の中心を中心とした略正三角形の頂点に相当する3箇所に、後方に向かって延びた基板支持柱61が設けられている。各基板支持柱61は、ベースヨーク板31に立設された押しピン支柱62と、押しピン支柱62に軸穴63bが擦動自在に嵌合された押しピン63と、押しピン支柱62の先端面と軸穴63bとの間に挿入されたコイルばね64とを備えている(図9参照)。そうして、押しピン63の先端面63aが平坦に形成され、先端面63aの周縁部が面取り加工されている。基板支持柱61の先端面も押しピン63の先端面63aと同様に形成される。
各基板支持柱61および押しピン63は、低摩擦材、例えばフッ素樹脂等で形成するのが好ましい。
【0037】
一方、駆動用ヨーク板32の前面には、上記3個の基板支持柱61と対向する3箇所に、補強板41の後面(裏面)の平滑面41aに接触する基板支持突起65が設けられている。各基板支持突起65は、低摩擦材で形成されていて、先端面65aが、駆動用ヨーク板32と平行な一平面上に位置するように平坦に形成され、先端面65aの周縁部が面取り加工されている。
【0038】
各基板支持柱61の押しピン63は、コイルばね64の付勢力によって先端面63aが、電気基板40の前面(表面)に形成された平滑面40aに当接してこれを後方に押圧する。一方、補強板41の後面(裏面)に平滑面40aと平行に形成された平滑面41aは、基板支持突起65の先端面65aに当接して支持される。つまり、電気基板40、補強基板41及び電気基板40上に装着されたCCD45等の部材が、基板支持柱61および基板支持突起65によって、XY平面内において任意の方向に移動及び回転自在に支持される。したがって、電気基板40にX方向、Y方向または回転方向の力が作用すると、押しピン63と電気基板40、基板支持突起65と補強板41とが摺接しながら平行状態を保って、X方向、Y方向に移動し、また回転する。以上の電気基板40及び補強板41、並びに電気基板40上に装着されたCCD45及びコイルCYA、CYB、CXなど、電気基板40及び補強板41と一体として移動する部材が、可動部50であり、ステージ基板である。平滑面40a、41aは、ステージ基板の両面に互いに平行に形成された平行平滑面であり、押しピン63が可動部材、基板支持突起65が固定部材である。押しピン63、基板支持突起65の断面形状、大きさは任意である。平滑面40a、41aは、可動部50の可動範囲をカバーできる形状、大きさに形成される。低摩擦部材で形成し、またはフッ素樹脂などの低摩擦材をコーティングすることが好ましい。
【0039】
以上のような構成の手ぶれ補正装置30は、制御手段CTLからX方向駆動用コイルCX、Y方向駆動用コイルCYA、及びY方向駆動用コイルCYBに電流を流すことにより手ぶれ補正動作を行う。すなわち、X方向駆動用コイルCXに電流を流すとX方向駆動用コイルCXには図3の矢印FX1方向またはFX2方向の駆動力が生じる。また、Y方向駆動用コイルCYA、CYBに電流を流すとY方向駆動用コイルCYA、CYBには図3の矢印FY1方向またはFY2方向の駆動力が生じる。
【0040】
周知のように、手ぶれによってカメラボディ11がX方向またはY方向に振動したときに、カメラボディ11に内蔵された振動検出センサSDS(図1参照)でカメラボディ11のX方向とY方向の振動(手ぶれ、角速度)を検出し、ホール素子SX及びホール素子SYでCCD45(各磁石MX、MY)のカメラボディ11に対するX方向とY方向の相対位置を把握しつつ、CCD45をカメラボディ11に対して、手ぶれによって生じる撮像面46上の被写体像が移動する方向及び速度と同一の方向に同一の速度で移動させれば、撮像面46上の被写体像のぶれが軽減または補正される。従って、CCD45がこのような直線移動を行うように、制御手段CTLから各X方向駆動用コイルCX、Y方向駆動用コイルCYA、CYBに電流を流せば、手ぶれによるCCD45上の被写体像のぶれが軽減(補正)される。
【0041】
さらに、電気基板40及び補強板41(CCD45)はベースヨーク板31及び駆動用ヨーク板32に対して相対回転可能なので、制御手段CTLからY方向駆動用コイルCYAとY方向駆動用コイルCYBに流す電流の大きさを異ならせてまたは逆向きに流し、Y方向駆動用コイルCYAとY方向駆動用コイルCYBに異なる駆動力または互いに逆向きの駆動力を発生させれば、電気基板40及び補強板41(CCD45)が回転する。従って、カメラボディ11がXY平面上を回転したときに、振動検出センサSDSでカメラボディ11の回転速度(手ぶれ速度)を検出し、電気基板40及び補強板41(CCD45)が回転ぶれ方向と逆向きにこの回転速度(手ぶれ速度)と同じ回転速度で回転するように、制御手段CTLからY方向駆動用コイルCYAとY方向駆動用コイルCYBに個別に調整した電流を流せば、いわゆる回転ぶれが補正される。
【0042】
以上、本発明について一実施形態を利用して説明したが、本発明はこの実施形態に限定されるものではなく、様々な変形を施して実施可能である。
さらに、CCD以外の撮像素子、例えばCMOSイメージセンサーを利用できるのは勿論である。
またX方向及びY方向の位置変化検出センサとしてホール素子SX、XYを利用したが、ホール素子以外のセンサ、例えばMRセンサやMIセンサを利用することも可能である。
【0043】
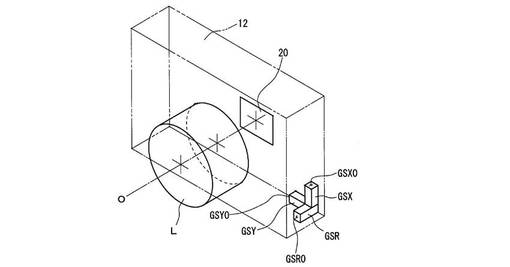
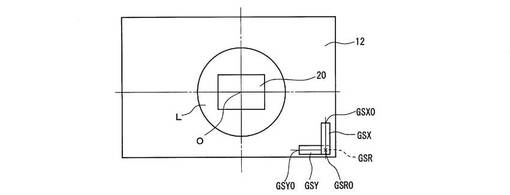
カメラボディ11の手ぶれを検出するセンサの概要について図10乃至図12に示した。カメラボディ11には、光軸Oの縦(Y)方向角速度、横(X)方向角速度及び光軸O周りの回転角速度を検出する振動検出センサSDSとして、Y方向ジャイロセンサGSY、X方向ジャイロセンサGSX及び回転検出ジャイロセンサGSRが設けられている。この実施例では、これらのY方向、X方向、回転検出ジャイロセンサGSY、GSX、GSRが、デジタルカメラ10の正面視右下隅に設けられている。Y方向ジャイロセンサGSYは、ジャイロセンサ軸GSYOが横方向(X方向と平行)に配置され、このジャイロセンサ軸GSYO(X軸)周りの角速度、つまりカメラボディ11の縦(Y)方向角速度を検出する。X方向ジャイロセンサGSXはジャイロセンサ軸GSXOが縦方向(Y方向と平行)に配置され、このジャイロセンサ軸GSXO(Y軸)周りの角速度、つまりカメラボディ11の横(X)方向角速度を検出する。回転検出ジャイロセンサGSRはそのジャイロセンサ軸GSROが光軸O(Z方向)と平行に配置され、このジャイロセンサ軸GSRO(Z軸)周りの角速度、つまりカメラボディ11の光軸O周りの角速度を検出する。
【0044】
なお、これらのY方向、X方向、回転検出ジャイロセンサGSY、GSX、GSRの配置は一例である。Y方向、X方向、回転検出ジャイロセンサGSY、GSX、GSRを個別に構成し配置してもよいが、一体型の2軸ジャイロセンサと1軸ジャイロセンサを組み合わせてもよく、一体型の3軸ジャイロセンサを使用してもよく、それらの配置も図示実施例に限定されない。Y方向、X方向、回転検出ジャイロセンサGSY、GSX、GSRを個別に配置すると配置の自由度が高くなり、一体型の3軸ジャイロセンサを使用すると組み立てが容易になる。
【0045】
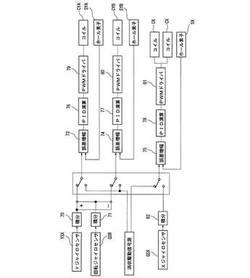
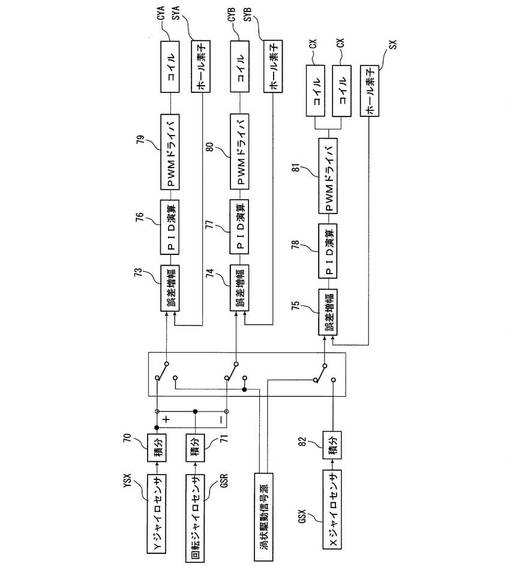
次に、このような構成の像ぶれ補正装置25の動作について、図13に示した制御系の実施形態である制御回路ブロック図を参照して説明する。なお、CPUで制御する場合は、図13における積分回路、誤差増幅回路、PID演算回路、PWMドライバの動作はソフトウェアによっても実現可能である。撮影者の手ぶれによりカメラボディ11が揺れる(振動する)と、光軸Oの角度ぶれ及び回転ぶれ(基準平面内での回転ぶれ)が生じ、画像に揺れが生じる。像ぶれ補正は、この画像の揺れを打ち消すように行われる。
【0046】
撮影レンズL(レンズL1乃至L3)を透過した被写体光は、開口51から光学ローパスフィルタ49を通ってCCD45の撮像面46に被写体像を形成する。この際、カメラボディ11の像ぶれ補正スイッチSW(図1参照)がONにされていると、カメラボディ11にX方向とY方向の手ぶれ及び光軸O周りの手ぶれが生じたときに、X方向ジャイロセンサGSXの出力、Y方向ジャイロセンサGSYの出力、回転検出ジャイロセンサGSRの出力が積分回路82、積分回路70、積分回路71でそれぞれ積分され、X方向、Y方向の角度ぶれ量に応じた出力値及び光軸O周りの回転ぶれ量に応じた出力値に変換され、出力される。
【0047】
最初に、回転補正無しのX方向及びY方向の像ぶれ補正動作について説明する。
カメラボディ11のX方向の振動量に応じた横ぶれ信号に対応する積分回路82の出力値とホール素子SXの出力値(CCD45(X方向駆動用コイルCXのベースヨーク板31に対するX方向の移動量信号)が誤差増幅回路75で比較され、差に応じた信号が出力される。そうして、誤差増幅回路75の出力信号に基づいてPID演算回路78によりPID演算が行われ、積分回路72の出力値とホール素子SXの出力値の出力値との差が小さくなるようにX方向駆動用コイルCXに印加する電圧に関する信号が演算される。そうして、PID演算回路78に基づいて、PWMドライバ81からPWMパルスがX方向駆動用コイルCXに印加される。すると、X方向駆動用コイルCXにFX1方向またはFX2方向の駆動力が発生し、この駆動力によって、積分回路72の出力値とホール素子SXの出力値の差が小さくなるようにCCD45(可動部50)がFX1方向またはFX2方向に移動する。
【0048】
同様に、カメラボディ11のY方向の振動に応じた縦ぶれ信号に対応する積分回路70の出力値とホール素子SYA、SYBの出力値(Y方向駆動用コイルCYA、CYBのカメラボディ11に対するY方向の移動量信号)が誤差増幅回路73、74で比較され、差に応じた出力値が出力される。そうして、誤差増幅回路73、74の出力値に基づいてPID演算回路76、77によりPID演算が行われ、誤差増幅回路73、74の出力値が小さくなるように、つまり積分回路70の出力値とホール素子SYA、SYBの出力値の差が小さくなるようにY方向駆動用コイルCYA、CYBに印加する電圧に関する値が演算される。さらに、PID演算回路76、77の演算結果に基づいて、PWMドライバ79からPWMパルスがY方向駆動用コイルCYAに印加され、PWMドライバ80からPWMパルスがY方向駆動用コイルCYBに印加される。このときY方向駆動用コイルCYA、CYBに印加されるPWMパルスの大きさと向きは一致している。従って、Y方向駆動用コイルCYA、CYBに生じたFY1方向またはFY2方向の駆動力によって、積分回路70の出力値とホール素子SYAの出力値の差、及び積分回路70の出力値とホール素子SYBの出力値の差がそれぞれ小さくなるように、CCD45(可動部50)がFY1方向またはFY2方向に移動する。
【0049】
このように、手ぶれによる光軸Oの角度ぶれ量に追従して、CCD45(可動部50)がFX1方向またはFX2方向とFY1方向またはFY2方向に直線移動して、手ぶれによるCCD45上の像ぶれが軽減(補正)される。なお、CCD45がFX1、FX2方向及びFY1、FY2方向に直線移動している間、CCD45の撮像面46は常に光軸Oと直交状態を維持する。
【0050】
次に、回転像ぶれ補正動作について主に図13を参照して説明する。
カメラボディ11に光軸O回りの回転(回転ぶれ)が生じると、その回転を検出した回転検出ジャイロセンサGSRの出力を積分回路71が積分し、CCD45の回転ぶれ量に対応する出力値に変換する。積分回路70からはY方向ジャイロセンサGSYが検出した出力値が誤差増幅器73、74に入力される。図13に示すように、誤差増幅回路73には、Y方向ジャイロセンサGSYの縦ぶれに対応する出力値に回転検出ジャイロセンサGSRの回転ぶれに対応する出力値が加算された値が入力され、誤差増幅回路74にはY方向ジャイロセンサGSYの縦ぶれに対応する出力値から回転検出ジャイロセンサGSRの回転ぶれに対応する出力値が減算された値が入力される。
【0051】
さらに、積分回路70の出力値と積分回路71の出力値の和とホール素子SYAの出力値とが誤差増幅回路73によって比較され、積分回路70の出力値と積分回路71の出力値の差とホール素子SYBの出力値とが誤差増幅回路74によって比較される。そうして、誤差増幅回路73、74の出力値に基づいてPID演算回路76、77によりPID演算が行われ、誤差増幅回路73、74の出力値が小さくなるように、つまり積分回路70の出力値及び積分回路71の出力値の和とホール素子SYAの出力値が小さくなるように、かつ、積分回路70の出力値及び積分回路71の出力値の差とホール素子SYBの出力値の差が小さくなるように、Y方向駆動用コイルCYA、CYBに印加する電圧に関する値が演算される。さらに、PID演算回路76、77の演算結果に基づいて、PWMドライバ79からPWMパルスがY方向駆動用コイルCYAに印加され、PWMドライバ80からPWMパルスがY方向駆動用コイルCYBに印加される。これにより、Y方向駆動用コイルCYAとY方向駆動用コイルCYBには駆動力差が発生するので、CCD45(可動部50)が光軸Oと平行な軸を中心としてベースヨーク板31に対してFY1またはFY2方向に回転し、カメラボディ11の回転ぶれによる回転像ぶれも補正される。
【0052】
理解を容易にするためにX方向及びY方向の像ぶれ補正制御及び回転像ぶれ補正制御を別個に説明したが、通常はこれらの像ぶれが同時に発生するので、X方向及びY方向の像ぶれ補正制御及び回転像ぶれ補正制御が同時に実行される。
【0053】
以上は、通常の手ぶれ(像ぶれ)補正動作である。次に、本実施形態の特徴である、塵除去駆動装置およびその動作について説明する。この塵除去駆動は、可動部50を発散方向に螺旋状に揺動させることで、電気基板40の前面、特に平滑面40a、補強板41の背面、特に平滑面41a、および光学ローパスフィルタ49の前面に付着した塵をも払拭することができる。
【0054】
この実施形態では、可動部を渦状に駆動するための信号を出力する渦状駆動信号源83を備えている。渦状駆動信号源83からは、二種類の渦状駆動信号が出力される。一方はY方向駆動用コイルCYA、CYBを駆動するY方向駆動信号であって、他方はX方向駆動用コイルCXを駆動するX方向駆動信号である。Y方向駆動信号は、切換スイッチ85のY信号スイッチ85a、85bを介して、誤差増幅回路73、74に入力され、X方向駆動信号は、切換スイッチ85のX信号スイッチ85cを介して誤差増幅回路75に入力される。
【0055】
一方のY信号スイッチ85aは、誤差増幅回路73の一方の入力を、積分回路70、71の出力信号とY方向駆動信号との間で択一的に切換え、他方のY信号スイッチ85bは誤差増幅回路74の一方の入力を、積分回路70、71の出力信号とY方向駆動信号との間で択一的に切換える。X信号スイッチ85cは、誤差増幅回路75の一方の入力を、積分回路82とX方向駆動信号との間で択一的に切り換える。
【0056】
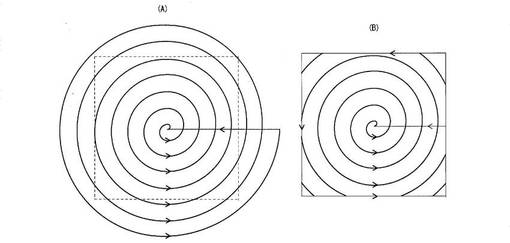
塵除去動作を実行するときは、制御手段CTLが切換スイッチ85の各スイッチ85a乃至85cを、渦状駆動信号源83側に切り換える。そうして渦状駆動信号源83から、Y方向駆動信号及びX方向駆動信号を出力する。この実施形態では、可動部50が中心位置から反時計方向に渦状の軌跡を描いて運動するようにY方向駆動信号及びX方向駆動信号を出力する。そうして、この実施形態では7周分の軌跡を描くと、可動部50を中心位置に復帰させて渦状動作(払拭動作)を終了する。図14の(A)には、可動部が自由に移動できる場合の軌跡を示してあるが、この実施形態では、可動部50の移動が、可動範囲規制ピン35及び可動範囲規制孔42によって、破線で示した範囲に制限されている。したがって、実際は、図14の(B)に示したように、理論上の移動軌跡が可動範囲を超える部分では、移動規制範囲に沿った方形の軌跡を描くように運動する。
電気基板40の平滑面40aおよび補強基板41の平滑面41a上に付着した塵は、このような可動部50の渦巻状の駆動により、押しピン63および基板支持突起65により可動範囲外へ移動させられて、払拭される。したがって、可動部50の可動範囲内において、その平行度、平面性が一定に維持される。
【0057】
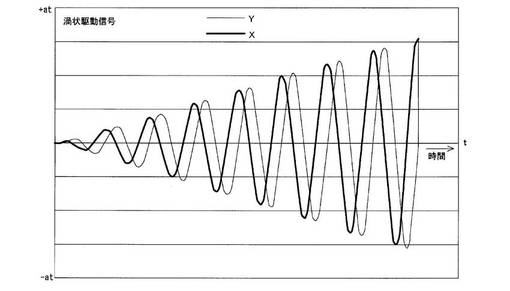
以上の渦状軌跡を描いて運動させるために渦状駆動信号源83から出力されるY方向駆動信号及びX方向駆動信号を図15に示した。この実施形態において、Y方向駆動信号は式、
at・sin(2πft)
X方向駆動信号は式、
a・cos(2πft)
で現すことができる。
ただし、aは定数、fは周期、tは経過時間である。
【0058】
ここで、定数aは、実際に可動部50を駆動する状況に応じて設定される値であり、周期fは10Hz乃至20Hz程度が好ましく、かかる周期fで可動部50が可動範囲内外を運動するように定数aを設定する。
これらのY方向駆動信号及びX方向駆動信号を出力する時間は製造時に設定されるが、使用者が設定できる構成が好ましい。
【0059】
また、Y方向駆動信号を式、
at・sin(2πft−π/2)
と設定してもよい。
【0060】
渦状軌跡の径方向のピッチは、押しピン63、基板支持突起65の直径の1/2以下(半径以下)となるように設定することが好ましい。
【0061】
以上の塵除去動作を実行するタイミングは、例えばカメラの電源がオンされたとき、または露光開始直前など定期的に実行させてもよい。また、撮影者が操作可能なスイッチが操作されたときに実行する構成としてもよい。さらに、露光開始直前に実行する場合と、その他の場合とで、X方向駆動信号、Y方向駆動信号を出力する時間、波形あるいは強度などの特性を異ならせてもよい。例えば、露光開始直前は出力時間を短くし、手動操作されたときは出力時間を長くするか、強く(定数aを大きく)すれば、露光の際にはシャッタタイムラグを小さくすることが可能になり、手動による塵除去開始操作の場合は塵除去能力を高めることが可能になる。
【0062】
また、X方向駆動信号、Y方向駆動信号は、デジタルデータをアナログ信号に変換して生成してもよい。この場合は、予めデジタルデータを不揮発性メモリ手段に書き込み、塵除去動作の際に制御手段CTLが読み出し、D/A変換器でアナログのX方向駆動信号、Y方向駆動信号に変換する構成としてもよい。
【0063】
以上の通り本発明の実施形態によれば、可動部50が図14の(B)に示したように可動中心部から外側に向かって渦巻き状の軌跡で運動することにより、擦動部平面上に付着した塵は可動部50の中心部に対して外方に移動して払拭されるので、動作不良の原因が除去されて、塵などが押しピン63の先端面63aと電気基板40(平滑面40a)の間、基板支持突起65の先端面65aと補強板41(平滑面41a)1との間に入り込むなどによる動作不良がなくなる。引用文献1では、塵などが一旦擦動部の隙間に入り込んでしまうと簡単には取り除くことができないが、本発明によれば、塵などが押しピン63の先端面63aと電気基板40(平滑面40a)の間、基板支持突起65の先端面65aと補強板41(平滑面41a)との間に入り込んだとしても、1回または複数回の除去動作によって取り除かれる。
【0064】
以上の実施形態では塵除去動作時に、Y方向駆動用コイルCYA、CYBに同一のY方向駆動信号を入力したが、異なるY方向駆動信号を入力して、可動部50に揺動動作を加えてもよい。
【図面の簡単な説明】
【0065】
【図1】本発明の一実施形態である手ぶれ補正装置を内蔵したデジタルカメラの縦断側面図である。
【図2】手ぶれ補正装置を前方から見た分解斜視図である。
【図3】駆動用ヨーク板を破断して示す手ぶれ補正装置の背面図である。
【図4】図3のIV-IV矢線に沿う断面図である。
【図5】図3のV-V矢線に沿う断面図である。
【図6】図3のVI-VI矢線に沿う断面図である。
【図7】ベースヨーク板及び磁石の背面図である。
【図8】図6の下半部の拡大図である。
【図9】可動部を任意の方向に移動および回動自在に支持する基板支持柱および基板支持突起の構造を示す拡大図である。
【図10】X、Y方向ぶれ及び光軸周りの回転ぶれを検出するジャイロセンサの配置例を示す、カメラボディの斜視図である。
【図11】同カメラボディの正面図である。
【図12】同カメラボディの側面図である。
【図13】X、Y方向の像ぶれ補正及び光軸に平行な軸周りの回転ぶれ補正並びに塵除去動作を行う制御回路の実施例をブロックで示す図である。
【図14】同手ぶれ補正装置の塵除去動作における可動部の移動軌跡を示す図であって、(A)は理論上の移動軌跡を、(B)は実際の移動軌跡を示す図である。
【図15】同手ぶれ補正装置に塵除去動作を行わせる際のY方向駆動信号およびX方向駆動信号の波形を示す図である。
【符号の説明】
【0066】
20 デジタルカメラ(カメラ)
30 手ぶれ補正装置(ステージ装置)
31 ベースヨーク板
32 駆動用ヨーク板
33 支柱
35 可動範囲規制ピン(可動範囲規制手段)
40 電気基板(ステージ板)
40a 平滑面
41 補強板(ステージ板)
41a 平滑面
42 可動範囲規制孔(可動範囲規制手段)
45 CCD(撮像素子)
50 可動部
61 基板支持柱
62 押しピン支柱
63 押しピン
63a 先端面
64 コイルばね
65 基板支持突起
65a 先端面
70 71 72 積分回路
73 74 75 誤差増幅回路
76 77 PID演算回路
78 79 80 81 PWMドライバ
82 積分回路
83 渦状駆動信号源
85 切換スイッチ
85a 85b Y信号スイッチ
85c X信号スイッチ
CTL 制御手段
CL 補正レンズ
CX X方向駆動用コイル(駆動部)
CYA CYB Y方向駆動用コイル(駆動部)
MCX X方向駆動用高磁束密度空間
MCY Y方向駆動用高磁束密度空間
ML 磁性流体
MX X用永久磁石
MY Y用永久磁石
SDS 振動検出センサ
SX SY ホール素子(位置センサ)
O 光軸
【技術分野】
【0001】
本発明は、ステージ装置、手ぶれ補正装置およびその駆動方法、より詳細には可動部分に不着した塵埃などの除去、払拭駆動ができるステージ装置、手ぶれ補正装置及びその駆動方法に関する。
【背景技術】
【0002】
撮像素子を移動させて手ぶれ補正する従来の手ぶれ補正装置の主力方式であるXYガイド擦動駆動方式の場合、装置内に付着した塵等を、XY擦動方向に沿って個別に直進交番励振して払拭させる方法が知られている(特許文献1)。
【0003】
さらに撮像素子を移動させて手ぶれ補正する手ぶれ補正装置として、光軸に対して直交するXY方向だけでなく、XY平面内で回転させる回転方向の手ぶれも補正する、いわゆる無ガイド方式の手ぶれ補正装置が知られている(特許文献2)。この無ガイド方式の手ぶれ補正装置では、撮像素子が光軸と直交するXY平面内において自由に移動及び回転できるように、撮像素子の前後方向から支持部材によって面と面で擦動自在に挟持されている。
【特許文献1】特許第3044067号公報
【特許文献2】特開2005‐316222号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
XYガイド擦動駆動方式のぶれ補正装置の場合、擦動部分、すなわち、XYガイド部材は一般的に円柱状シャフト形状であり、その表面に塵が付着したとしても、XY方向の擦動により塵を除去することが可能である。
しかしながら、無ガイド方式のぶれ補正装置の場合、擦動部分は、撮像素子が載置されている可動体の擦動面であり、単純なXY駆動では、十分な塵の除去ができず、可動範囲における擦動面全体に対して付着した塵を除去する駆動を行う必要性がある。無ガイド方式のぶれ補正装置の場合は、塵などがぶれ補正装置の擦動部に付着すると、擦動摩擦の増大や引っかかりが発生し、滑らかな移動制御ができなくなり、ぶれ補正性能の低下や動作不良を生じるおそれがあり、XYガイド擦動駆動方式のぶれ補正装置の場合よりも、確実かつ広範囲にわたって塵の除去動作を行わなければならない。
【0005】
本発明は、従来の挟持擦動方式に手ぶれ補正装置の問題に鑑みてなされたものであって、特にステージ装置、ぶれ補正装置の擦動部に付着した塵等を確実に払拭できるステージ装置、ぶれ補正装置およびその駆動方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明のステージ装置は、固定支持基板と、上記固定支持基板に対して所定間隔で平行に配置されたステージ板と、上記ステージ板の表裏に形成された平行平滑面を擦動自在に表裏側から挟圧して該ステージ板を基準平面内において任意の方向に移動自在に支持する擦動支持手段と、上記固定支持基板と上記ステージ板とに装着された、上記ステージ板を所望の方向に移動させる駆動手段と、この駆動手段を、上記ステージ板がその可動範囲内において可動中心の周りを周回する移動軌跡を描いて運動するように制御する制御手段とを備えたことに特徴を有する。
【0007】
ステージ板にはその両面に平行平滑面が形成され、上記擦動支持手段は、一方が固定され、他方が弾性的に付勢された部材によって上記平行平滑面を摺動自在に挟圧する。
【0008】
より実際的には上記駆動手段は、上記固定支持基板と上記ステージ板の一方に装着された少なくとも2個の磁束発生部材、および他方に装着された、上記各磁束発生部材が発生する磁束を受けて上記基準平面内において異なる方向に駆動力を発生する2個の駆動用コイルを備えていて、上記制御手段は、上記各駆動用コイルに同時に所定周期の駆動信号を出力して上記ステージをその可動中心の周りを周回する移動軌跡を描いて運動させる。
【0009】
上記磁束発生部材は、直交する方向に配置されたX方向永久磁石とY方向永久磁石とを備え、上記駆動用コイルは、上記X方向永久磁石とY方向永久磁石と対向配置されたX用駆動コイルとY用駆動コイルを備えることが好ましい。
【0010】
上記移動軌跡は、上記ステージ板が可動範囲の中心から発散する渦状に周回する渦状の軌跡、またはステージ板の可動範囲の中心を周回する円状の軌跡とすることが好ましい。
【0011】
本発明の手ぶれ補正装置は、固定支持基板と、上記固定支持基板に対して所定間隔で平行に配置されたステージ板と、上記ステージ板の表裏に形成された平行平滑面を擦動自在に表裏側から挟圧して該ステージ板を基準平面内において任意の方向に移動自在に支持する擦動支持手段と、上記ステージ板に装着された撮像手段と、上記固定支持基板と上記ステージ板とに装着された、上記ステージ板を所望の方向に移動させる駆動手段と、搭載された機器の振動を検出する振動検出手段と、該振動検出手段の検出結果に基づいて、上記機器の結像光学系によって上記撮像手段に形成された被写体像のぶれが減少するように上記駆動手段をぶれ補正駆動するぶれ補正駆動制御手段と、上記ぶれ補正駆動とは別個に、上記ステージ板がその可動範囲の中心を周回する移動軌跡を描いて運動するように上記駆動手段を駆動する塵除去駆動制御手段とを備えたことに特徴を有する。
【0012】
ステージ板にはその両面に平行平滑面が形成され、上記擦動支持手段は、一方が固定され、他方が弾性的に付勢された部材によって上記平行平滑面を摺動自在に挟圧する。
【0013】
好ましくは、上記駆動手段は、上記固定支持基板と上記ステージ板の一方に装着された少なくとも2個の磁束発生部材、および他方に装着された、上記各磁束発生部材が発生する磁束を受けて上記基準平面内において異なる方向に駆動力を発生する2個の駆動用コイルを備えていて、上記塵除去駆動制御手段は、上記各駆動コイルに同時に所定周期の渦状駆動信号を出力して上記ステージ板をその可動範囲の中心の周りを周回する移動軌跡を描いて運動させる。
【0014】
より実際的には、上記磁束発生部材は、直交する方向に配置されたX方向永久磁石とY方向永久磁石とを備え、上記駆動用コイルは、上記X方向永久磁石とY方向永久磁石に対向配置されたX用駆動コイルとY用駆動コイルを備えていて、上記塵除去駆動制御手段は、上記各X用駆動コイルおよびY用駆動コイルに所定周期の駆動信号を出力して上記ステージをその可動範囲の中心の周りを周回する移動軌跡を描いて運動させる。
【0015】
上記ぶれ補正手段は、カメラの撮像光学系によって上記撮像手段に形成された被写体像のぶれが減少するように上記X用駆動コイル及びY用駆動コイルに通電して上記ステージ板を運動させ、上記塵除去駆動制御手段は、上記ステージ板が周回状の軌跡を描いて運動するように上記X用駆動コイル及びY用駆動コイルに通電する渦状駆動信号源を備え、上記X用駆動コイル及びY用駆動コイルへの通電を上記ぶれ補正装置と上記渦状駆動信号源との間で切り換える切換手段とを備え、上記制御手段は、上記切換手段を、上記塵除去制御するときに上記渦状駆動信号源に切り換えることが好ましい。
【0016】
上記移動軌跡は、上記ステージ板が可動範囲の中心から発散する渦状に周回する渦状の軌跡、または上記ステージ板の可動範囲の中心を周回する円状の軌跡が好ましい。
【0017】
上記渦状の軌跡の径方向ピッチは、上記ステージ板に擦動自在に接触してステージ板を運動自在に支持する部材の直径の半分以下であることが好ましい。
【0018】
上記塵除去駆動制御手段は、上記塵除去動作開始時に上記ステージ板をその可動中心位置に移動させ、上記塵除去動作終了後、上記ステージ板を可動範囲の中心に移動させることが好ましい。
【0019】
上記塵除去駆動制御手段は、搭載されたカメラの電源がオンされたとき、露光直前、可動ミラーアップ動作中、あるいは露光終了後、または所定のスイッチ操作を受けたときに上記塵除去動作を所定時間実行することが好ましい。
【0020】
本発明のステージ装置の駆動方法は、固定支持基板に対して所定間隔で平行に配置され、かつ基準平面内において移動自在に支持されたステージ板を備えたステージ装置の駆動方法であって、上記ステージ板を、その可動範囲の中心を周回する移動軌跡を描いて運動させること、に特徴を有する。
【発明の効果】
【0021】
本発明のステージ装置によれば、駆動手段を、上記ステージ板がその可動範囲の中心を周回する移動軌跡を描いて運動するように駆動するので、ステージ板に付着した塵埃などがステージ板の外方に払われて、動作不良の原因となる塵埃などが除去される。
【0022】
本発明のぶれ補正装置によれば、撮像素手段が搭載されたステージ板が、その可動範囲の中心を周回する移動軌跡を描いて運動するので、ステージ板に付着した塵埃などがステージ板の外方に払われて、動作不良の原因となる塵埃などが除去される。
搭載されたカメラの電源がオンされたとき、露光直前、可動ミラーアップ動作中、あるいは露光終了後、または所定のスイッチ操作を受けたとき等に塵除去運動を繰り返すことにより、塵等を確実に払拭することができる。
【発明を実施するための最良の形態】
【0023】
以下、添付図面を参照して本発明の一実施形態について説明する。以下の説明では図1及び図2の矢線で示すように、カメラボディ11(手ぶれ補正装置30)の左右方向をX方向、上下方向をY方向、前後方向をZ方向と定義する。
図1に示すように、カメラボディ11(レンズ鏡筒)内には、複数のレンズL1、L2、L3からなる光学系が配設されており、レンズL3の後方には手ぶれ補正装置(ステージ装置)30が配設されている。
【0024】
手ぶれ補正装置30は図2から図8に示す構造である。
図2から図8に示すように手ぶれ補正装置30は、軟鉄等の磁性体からなる、外形が正面視横長方形のベースヨーク板31と、正面形状がベースヨーク板31と同一で軟鉄等の磁性体からなりベースヨーク板31の後方に位置する駆動用ヨーク板32と、を備えている。ベースヨーク板31の後面(裏面)の四隅には後方に向かって延出する4本の円柱形状の支柱33が突設されており、各支柱33の後端面が駆動用ヨーク板32の前面(表面)の四隅に固着されている。ベースヨーク板31と駆動用ヨーク板32は互いに平行に、所定間隔で固定されている。ベースヨーク板31の前面は、図示を省略した固定ねじによってカメラボディ内面に固定されている。
【0025】
ベースヨーク板31の中央部には方形開口34が穿設されている。ベースヨーク板31の後面の方形開口34の両側部には、2本の円柱形状をなす可動範囲規制ピン(可動範囲規制手段)35が後方に延びるように突設されており、左右の可動範囲規制ピン35の後端面は駆動用ヨーク板32の前面に固着されている。
【0026】
ベースヨーク板31の後面の左右両端部には、S極とN極がX方向に並ぶX用永久磁石MXがそれぞれ固定されている。これら左右のX用永久磁石MXは互いにX方向に並んでおり、両者のY方向位置は一致している。そして、ベースヨーク板31及び駆動用ヨーク板32がX用永久磁石MXの磁束を通すことにより、ベースヨーク板31及び左右のX用永久磁石MXと駆動用ヨーク板32との間にX方向駆動用高磁束密度空間MCXが形成されている(図8参照)。図示は省略してあるが、もう一方のX用永久磁石MX側にも同様にX方向駆動用高磁束密度空間MCXが形成されている。
【0027】
一方、ベースヨーク板31の後面の下端部には、S極とN極がY方向に並ぶ一対のY用永久磁石MYが固定されている。これら左右のY用永久磁石MYは互いにX方向に並んでおり、両者のY方向位置は一致している。そして、図8に示すように、ベースヨーク板31及び駆動用ヨーク板32が左右のY用永久磁石MYの磁束を通すことにより、ベースヨーク板31及び左右のY用永久磁石MYと駆動用ヨーク板32の間にY方向駆動用高磁束密度空間MCYが形成されている(図示は省略してあるが、もう一方のY用永久磁石MY側にも同様にY方向駆動用高磁束密度空間MCYが形成されている)。
【0028】
ベースヨーク板31と駆動用ヨーク板32の間には、ベースヨーク板31及び駆動用ヨーク板32と平行な平板状の電気基板(ステージ板)40が位置している。電気基板40の後面(裏面)には、正面形状が電気基板40と同一の補強板(ステージ板)41が固着され、電気基板40と補強板41が一体化している。電気基板40及び補強板41には、これらをZ方向に貫通する左右一対の可動範囲規制孔(可動範囲規制手段)42が穿設されている。左右の可動範囲規制孔42は共に方形孔であり、左右の可動範囲規制孔42を左右の可動範囲規制ピン35がそれぞれ貫通している。電気基板40及び補強板41は、図3に示す初期位置からベースヨーク板31に対してX方向とY方向を含むXY平面上を移動可能(直線移動だけでなく回転も可能)であるが、電気基板40及び補強板41のXY平面上の可動範囲は、左右の可動範囲規制ピン35及び可動範囲規制孔42によって制限される。
【0029】
電気基板40の前面(表面)中央部には、撮像素子としてのCCD45が固着されている。図3に示すようにCCD45は正面視で長方形をなし、かつ、図3において(電気基板40が初期位置にあるとき)X方向と平行をなす上下一対のX方向側辺45Xと、図3においてY方向と平行をなす左右一対のY方向側辺45Yとを具備している。CCD45の前面は光軸Oに対して直交する撮像面46であり、電気基板40が初期位置にあるときに撮像面46の中心が光軸O上に位置する。
【0030】
電気基板40の前面には、CCD45を囲むCCDホルダ47が固着されている。図4に示すように、CCDホルダ47の前端部は方形開口34を通ってベースヨーク板31の前方に突出している。CCDホルダ47の前壁には窓孔48が穿設されている。そして、CCDホルダ47の前壁とCCD45の間には光学ローパスフィルタ49が嵌合固定されており、光学ローパスフィルタ49とCCDホルダ47の前壁の間は気密状態に保たれている。CCD45の撮像面46は、レンズL1〜L3と光学ローパスフィルタ49を透過した像が結像する結像面である。
【0031】
電気基板40の前面には、CCDホルダ47を挟んで左右両端部に、同一仕様のX方向駆動用コイル(駆動部)CXが固着されている。X方向駆動用コイルCXはコイル線が百回以上渦巻き状に巻かれた(電気基板40と平行な方向にも電気基板40の板厚方向にも巻かれている)XY平面と平行なコイルであり、左右のX方向駆動用コイルCX同士はX方向側辺45Xと平行な方向(図3においてX方向)に並んでいる。別言すると、左右のX方向駆動用コイルCX同士のY方向側辺45Yと平行な方向の位置(図3においてはY方向の位置)は一致している。左右のX方向駆動用コイルCXは電気基板40及び補強板41がいずれの位置に移動しても、左右のX用永久磁石MXとZ方向に対向する(左右のX方向駆動用高磁束密度空間MCX内に位置する)。このX方向駆動用コイルCXと、ベースヨーク板31、駆動用ヨーク板32、及びX用永久磁石MXによってX方向駆動手段が構成されている。
【0032】
さらに電気基板40の前面には、左右のX方向駆動用コイルCXの中心部に位置するホール素子SXがそれぞれ固着されている。これらのホール素子SXは、対応するX方向駆動用高磁束密度空間MCXの磁束密度分布を利用して左右のX方向駆動用コイルCXのX方向位置をそれぞれ検出する。
【0033】
電気基板40の前面の下端部には、互いに同一仕様のY方向駆動用コイル(駆動部)CYAとY方向駆動用コイル(駆動部)CYBが固着されている。Y方向駆動用コイルCYAとY方向駆動用コイルCYBは共にコイル線が百回以上渦巻き状に巻かれた(電気基板40と平行な方向にも電気基板40の板厚方向にも巻かれている)XY平面と平行なコイルであり、Y方向駆動用コイルCYAとY方向駆動用コイルCYBは下側のX方向側辺45Xに沿って並んでいる(図3においてはX方向に並んでいる)。別言すると、Y方向駆動用コイルCYAとY方向駆動用コイルCYBのY方向側辺45Yと平行な方向の位置(図3におけるY方向位置)は一致している。Y方向駆動用コイルCYAとY方向駆動用コイルCYBは電気基板40及び補強板41がいずれの位置に移動しても、左右のY用永久磁石MYとZ方向に対向する(左右のY方向駆動用高磁束密度空間MCY内に位置する)。このY方向駆動用コイルCYA及びY方向駆動用コイルCYBと、ベースヨーク板31、駆動用ヨーク板32、及びY用永久磁石MYによってY方向駆動手段が構成されている。
【0034】
さらに電気基板40の前面には、Y方向駆動用コイルCYAとY方向駆動用コイルCYBの内部にそれぞれ位置する一対のホール素子SYがそれぞれ固着されている。これらのホール素子SYは、対応するY方向駆動用高磁束密度空間MCYの磁束密度分布を利用して、対応するY方向駆動用コイルCYA、CYBのY方向位置をそれぞれ検出する。
【0035】
上述したX方向駆動用コイルCX、Y方向駆動用コイルCYA、Y方向駆動用コイルCYB、ホール素子SX及びホール素子SYはすべて、カメラに内蔵されたCPU等によって構成される制御手段CTL(図1参照)に電気的に接続されている。
【0036】
さらに、ベースヨーク板31の後面には、方形開口34の外方であって、方形開口34の中心を中心とした略正三角形の頂点に相当する3箇所に、後方に向かって延びた基板支持柱61が設けられている。各基板支持柱61は、ベースヨーク板31に立設された押しピン支柱62と、押しピン支柱62に軸穴63bが擦動自在に嵌合された押しピン63と、押しピン支柱62の先端面と軸穴63bとの間に挿入されたコイルばね64とを備えている(図9参照)。そうして、押しピン63の先端面63aが平坦に形成され、先端面63aの周縁部が面取り加工されている。基板支持柱61の先端面も押しピン63の先端面63aと同様に形成される。
各基板支持柱61および押しピン63は、低摩擦材、例えばフッ素樹脂等で形成するのが好ましい。
【0037】
一方、駆動用ヨーク板32の前面には、上記3個の基板支持柱61と対向する3箇所に、補強板41の後面(裏面)の平滑面41aに接触する基板支持突起65が設けられている。各基板支持突起65は、低摩擦材で形成されていて、先端面65aが、駆動用ヨーク板32と平行な一平面上に位置するように平坦に形成され、先端面65aの周縁部が面取り加工されている。
【0038】
各基板支持柱61の押しピン63は、コイルばね64の付勢力によって先端面63aが、電気基板40の前面(表面)に形成された平滑面40aに当接してこれを後方に押圧する。一方、補強板41の後面(裏面)に平滑面40aと平行に形成された平滑面41aは、基板支持突起65の先端面65aに当接して支持される。つまり、電気基板40、補強基板41及び電気基板40上に装着されたCCD45等の部材が、基板支持柱61および基板支持突起65によって、XY平面内において任意の方向に移動及び回転自在に支持される。したがって、電気基板40にX方向、Y方向または回転方向の力が作用すると、押しピン63と電気基板40、基板支持突起65と補強板41とが摺接しながら平行状態を保って、X方向、Y方向に移動し、また回転する。以上の電気基板40及び補強板41、並びに電気基板40上に装着されたCCD45及びコイルCYA、CYB、CXなど、電気基板40及び補強板41と一体として移動する部材が、可動部50であり、ステージ基板である。平滑面40a、41aは、ステージ基板の両面に互いに平行に形成された平行平滑面であり、押しピン63が可動部材、基板支持突起65が固定部材である。押しピン63、基板支持突起65の断面形状、大きさは任意である。平滑面40a、41aは、可動部50の可動範囲をカバーできる形状、大きさに形成される。低摩擦部材で形成し、またはフッ素樹脂などの低摩擦材をコーティングすることが好ましい。
【0039】
以上のような構成の手ぶれ補正装置30は、制御手段CTLからX方向駆動用コイルCX、Y方向駆動用コイルCYA、及びY方向駆動用コイルCYBに電流を流すことにより手ぶれ補正動作を行う。すなわち、X方向駆動用コイルCXに電流を流すとX方向駆動用コイルCXには図3の矢印FX1方向またはFX2方向の駆動力が生じる。また、Y方向駆動用コイルCYA、CYBに電流を流すとY方向駆動用コイルCYA、CYBには図3の矢印FY1方向またはFY2方向の駆動力が生じる。
【0040】
周知のように、手ぶれによってカメラボディ11がX方向またはY方向に振動したときに、カメラボディ11に内蔵された振動検出センサSDS(図1参照)でカメラボディ11のX方向とY方向の振動(手ぶれ、角速度)を検出し、ホール素子SX及びホール素子SYでCCD45(各磁石MX、MY)のカメラボディ11に対するX方向とY方向の相対位置を把握しつつ、CCD45をカメラボディ11に対して、手ぶれによって生じる撮像面46上の被写体像が移動する方向及び速度と同一の方向に同一の速度で移動させれば、撮像面46上の被写体像のぶれが軽減または補正される。従って、CCD45がこのような直線移動を行うように、制御手段CTLから各X方向駆動用コイルCX、Y方向駆動用コイルCYA、CYBに電流を流せば、手ぶれによるCCD45上の被写体像のぶれが軽減(補正)される。
【0041】
さらに、電気基板40及び補強板41(CCD45)はベースヨーク板31及び駆動用ヨーク板32に対して相対回転可能なので、制御手段CTLからY方向駆動用コイルCYAとY方向駆動用コイルCYBに流す電流の大きさを異ならせてまたは逆向きに流し、Y方向駆動用コイルCYAとY方向駆動用コイルCYBに異なる駆動力または互いに逆向きの駆動力を発生させれば、電気基板40及び補強板41(CCD45)が回転する。従って、カメラボディ11がXY平面上を回転したときに、振動検出センサSDSでカメラボディ11の回転速度(手ぶれ速度)を検出し、電気基板40及び補強板41(CCD45)が回転ぶれ方向と逆向きにこの回転速度(手ぶれ速度)と同じ回転速度で回転するように、制御手段CTLからY方向駆動用コイルCYAとY方向駆動用コイルCYBに個別に調整した電流を流せば、いわゆる回転ぶれが補正される。
【0042】
以上、本発明について一実施形態を利用して説明したが、本発明はこの実施形態に限定されるものではなく、様々な変形を施して実施可能である。
さらに、CCD以外の撮像素子、例えばCMOSイメージセンサーを利用できるのは勿論である。
またX方向及びY方向の位置変化検出センサとしてホール素子SX、XYを利用したが、ホール素子以外のセンサ、例えばMRセンサやMIセンサを利用することも可能である。
【0043】
カメラボディ11の手ぶれを検出するセンサの概要について図10乃至図12に示した。カメラボディ11には、光軸Oの縦(Y)方向角速度、横(X)方向角速度及び光軸O周りの回転角速度を検出する振動検出センサSDSとして、Y方向ジャイロセンサGSY、X方向ジャイロセンサGSX及び回転検出ジャイロセンサGSRが設けられている。この実施例では、これらのY方向、X方向、回転検出ジャイロセンサGSY、GSX、GSRが、デジタルカメラ10の正面視右下隅に設けられている。Y方向ジャイロセンサGSYは、ジャイロセンサ軸GSYOが横方向(X方向と平行)に配置され、このジャイロセンサ軸GSYO(X軸)周りの角速度、つまりカメラボディ11の縦(Y)方向角速度を検出する。X方向ジャイロセンサGSXはジャイロセンサ軸GSXOが縦方向(Y方向と平行)に配置され、このジャイロセンサ軸GSXO(Y軸)周りの角速度、つまりカメラボディ11の横(X)方向角速度を検出する。回転検出ジャイロセンサGSRはそのジャイロセンサ軸GSROが光軸O(Z方向)と平行に配置され、このジャイロセンサ軸GSRO(Z軸)周りの角速度、つまりカメラボディ11の光軸O周りの角速度を検出する。
【0044】
なお、これらのY方向、X方向、回転検出ジャイロセンサGSY、GSX、GSRの配置は一例である。Y方向、X方向、回転検出ジャイロセンサGSY、GSX、GSRを個別に構成し配置してもよいが、一体型の2軸ジャイロセンサと1軸ジャイロセンサを組み合わせてもよく、一体型の3軸ジャイロセンサを使用してもよく、それらの配置も図示実施例に限定されない。Y方向、X方向、回転検出ジャイロセンサGSY、GSX、GSRを個別に配置すると配置の自由度が高くなり、一体型の3軸ジャイロセンサを使用すると組み立てが容易になる。
【0045】
次に、このような構成の像ぶれ補正装置25の動作について、図13に示した制御系の実施形態である制御回路ブロック図を参照して説明する。なお、CPUで制御する場合は、図13における積分回路、誤差増幅回路、PID演算回路、PWMドライバの動作はソフトウェアによっても実現可能である。撮影者の手ぶれによりカメラボディ11が揺れる(振動する)と、光軸Oの角度ぶれ及び回転ぶれ(基準平面内での回転ぶれ)が生じ、画像に揺れが生じる。像ぶれ補正は、この画像の揺れを打ち消すように行われる。
【0046】
撮影レンズL(レンズL1乃至L3)を透過した被写体光は、開口51から光学ローパスフィルタ49を通ってCCD45の撮像面46に被写体像を形成する。この際、カメラボディ11の像ぶれ補正スイッチSW(図1参照)がONにされていると、カメラボディ11にX方向とY方向の手ぶれ及び光軸O周りの手ぶれが生じたときに、X方向ジャイロセンサGSXの出力、Y方向ジャイロセンサGSYの出力、回転検出ジャイロセンサGSRの出力が積分回路82、積分回路70、積分回路71でそれぞれ積分され、X方向、Y方向の角度ぶれ量に応じた出力値及び光軸O周りの回転ぶれ量に応じた出力値に変換され、出力される。
【0047】
最初に、回転補正無しのX方向及びY方向の像ぶれ補正動作について説明する。
カメラボディ11のX方向の振動量に応じた横ぶれ信号に対応する積分回路82の出力値とホール素子SXの出力値(CCD45(X方向駆動用コイルCXのベースヨーク板31に対するX方向の移動量信号)が誤差増幅回路75で比較され、差に応じた信号が出力される。そうして、誤差増幅回路75の出力信号に基づいてPID演算回路78によりPID演算が行われ、積分回路72の出力値とホール素子SXの出力値の出力値との差が小さくなるようにX方向駆動用コイルCXに印加する電圧に関する信号が演算される。そうして、PID演算回路78に基づいて、PWMドライバ81からPWMパルスがX方向駆動用コイルCXに印加される。すると、X方向駆動用コイルCXにFX1方向またはFX2方向の駆動力が発生し、この駆動力によって、積分回路72の出力値とホール素子SXの出力値の差が小さくなるようにCCD45(可動部50)がFX1方向またはFX2方向に移動する。
【0048】
同様に、カメラボディ11のY方向の振動に応じた縦ぶれ信号に対応する積分回路70の出力値とホール素子SYA、SYBの出力値(Y方向駆動用コイルCYA、CYBのカメラボディ11に対するY方向の移動量信号)が誤差増幅回路73、74で比較され、差に応じた出力値が出力される。そうして、誤差増幅回路73、74の出力値に基づいてPID演算回路76、77によりPID演算が行われ、誤差増幅回路73、74の出力値が小さくなるように、つまり積分回路70の出力値とホール素子SYA、SYBの出力値の差が小さくなるようにY方向駆動用コイルCYA、CYBに印加する電圧に関する値が演算される。さらに、PID演算回路76、77の演算結果に基づいて、PWMドライバ79からPWMパルスがY方向駆動用コイルCYAに印加され、PWMドライバ80からPWMパルスがY方向駆動用コイルCYBに印加される。このときY方向駆動用コイルCYA、CYBに印加されるPWMパルスの大きさと向きは一致している。従って、Y方向駆動用コイルCYA、CYBに生じたFY1方向またはFY2方向の駆動力によって、積分回路70の出力値とホール素子SYAの出力値の差、及び積分回路70の出力値とホール素子SYBの出力値の差がそれぞれ小さくなるように、CCD45(可動部50)がFY1方向またはFY2方向に移動する。
【0049】
このように、手ぶれによる光軸Oの角度ぶれ量に追従して、CCD45(可動部50)がFX1方向またはFX2方向とFY1方向またはFY2方向に直線移動して、手ぶれによるCCD45上の像ぶれが軽減(補正)される。なお、CCD45がFX1、FX2方向及びFY1、FY2方向に直線移動している間、CCD45の撮像面46は常に光軸Oと直交状態を維持する。
【0050】
次に、回転像ぶれ補正動作について主に図13を参照して説明する。
カメラボディ11に光軸O回りの回転(回転ぶれ)が生じると、その回転を検出した回転検出ジャイロセンサGSRの出力を積分回路71が積分し、CCD45の回転ぶれ量に対応する出力値に変換する。積分回路70からはY方向ジャイロセンサGSYが検出した出力値が誤差増幅器73、74に入力される。図13に示すように、誤差増幅回路73には、Y方向ジャイロセンサGSYの縦ぶれに対応する出力値に回転検出ジャイロセンサGSRの回転ぶれに対応する出力値が加算された値が入力され、誤差増幅回路74にはY方向ジャイロセンサGSYの縦ぶれに対応する出力値から回転検出ジャイロセンサGSRの回転ぶれに対応する出力値が減算された値が入力される。
【0051】
さらに、積分回路70の出力値と積分回路71の出力値の和とホール素子SYAの出力値とが誤差増幅回路73によって比較され、積分回路70の出力値と積分回路71の出力値の差とホール素子SYBの出力値とが誤差増幅回路74によって比較される。そうして、誤差増幅回路73、74の出力値に基づいてPID演算回路76、77によりPID演算が行われ、誤差増幅回路73、74の出力値が小さくなるように、つまり積分回路70の出力値及び積分回路71の出力値の和とホール素子SYAの出力値が小さくなるように、かつ、積分回路70の出力値及び積分回路71の出力値の差とホール素子SYBの出力値の差が小さくなるように、Y方向駆動用コイルCYA、CYBに印加する電圧に関する値が演算される。さらに、PID演算回路76、77の演算結果に基づいて、PWMドライバ79からPWMパルスがY方向駆動用コイルCYAに印加され、PWMドライバ80からPWMパルスがY方向駆動用コイルCYBに印加される。これにより、Y方向駆動用コイルCYAとY方向駆動用コイルCYBには駆動力差が発生するので、CCD45(可動部50)が光軸Oと平行な軸を中心としてベースヨーク板31に対してFY1またはFY2方向に回転し、カメラボディ11の回転ぶれによる回転像ぶれも補正される。
【0052】
理解を容易にするためにX方向及びY方向の像ぶれ補正制御及び回転像ぶれ補正制御を別個に説明したが、通常はこれらの像ぶれが同時に発生するので、X方向及びY方向の像ぶれ補正制御及び回転像ぶれ補正制御が同時に実行される。
【0053】
以上は、通常の手ぶれ(像ぶれ)補正動作である。次に、本実施形態の特徴である、塵除去駆動装置およびその動作について説明する。この塵除去駆動は、可動部50を発散方向に螺旋状に揺動させることで、電気基板40の前面、特に平滑面40a、補強板41の背面、特に平滑面41a、および光学ローパスフィルタ49の前面に付着した塵をも払拭することができる。
【0054】
この実施形態では、可動部を渦状に駆動するための信号を出力する渦状駆動信号源83を備えている。渦状駆動信号源83からは、二種類の渦状駆動信号が出力される。一方はY方向駆動用コイルCYA、CYBを駆動するY方向駆動信号であって、他方はX方向駆動用コイルCXを駆動するX方向駆動信号である。Y方向駆動信号は、切換スイッチ85のY信号スイッチ85a、85bを介して、誤差増幅回路73、74に入力され、X方向駆動信号は、切換スイッチ85のX信号スイッチ85cを介して誤差増幅回路75に入力される。
【0055】
一方のY信号スイッチ85aは、誤差増幅回路73の一方の入力を、積分回路70、71の出力信号とY方向駆動信号との間で択一的に切換え、他方のY信号スイッチ85bは誤差増幅回路74の一方の入力を、積分回路70、71の出力信号とY方向駆動信号との間で択一的に切換える。X信号スイッチ85cは、誤差増幅回路75の一方の入力を、積分回路82とX方向駆動信号との間で択一的に切り換える。
【0056】
塵除去動作を実行するときは、制御手段CTLが切換スイッチ85の各スイッチ85a乃至85cを、渦状駆動信号源83側に切り換える。そうして渦状駆動信号源83から、Y方向駆動信号及びX方向駆動信号を出力する。この実施形態では、可動部50が中心位置から反時計方向に渦状の軌跡を描いて運動するようにY方向駆動信号及びX方向駆動信号を出力する。そうして、この実施形態では7周分の軌跡を描くと、可動部50を中心位置に復帰させて渦状動作(払拭動作)を終了する。図14の(A)には、可動部が自由に移動できる場合の軌跡を示してあるが、この実施形態では、可動部50の移動が、可動範囲規制ピン35及び可動範囲規制孔42によって、破線で示した範囲に制限されている。したがって、実際は、図14の(B)に示したように、理論上の移動軌跡が可動範囲を超える部分では、移動規制範囲に沿った方形の軌跡を描くように運動する。
電気基板40の平滑面40aおよび補強基板41の平滑面41a上に付着した塵は、このような可動部50の渦巻状の駆動により、押しピン63および基板支持突起65により可動範囲外へ移動させられて、払拭される。したがって、可動部50の可動範囲内において、その平行度、平面性が一定に維持される。
【0057】
以上の渦状軌跡を描いて運動させるために渦状駆動信号源83から出力されるY方向駆動信号及びX方向駆動信号を図15に示した。この実施形態において、Y方向駆動信号は式、
at・sin(2πft)
X方向駆動信号は式、
a・cos(2πft)
で現すことができる。
ただし、aは定数、fは周期、tは経過時間である。
【0058】
ここで、定数aは、実際に可動部50を駆動する状況に応じて設定される値であり、周期fは10Hz乃至20Hz程度が好ましく、かかる周期fで可動部50が可動範囲内外を運動するように定数aを設定する。
これらのY方向駆動信号及びX方向駆動信号を出力する時間は製造時に設定されるが、使用者が設定できる構成が好ましい。
【0059】
また、Y方向駆動信号を式、
at・sin(2πft−π/2)
と設定してもよい。
【0060】
渦状軌跡の径方向のピッチは、押しピン63、基板支持突起65の直径の1/2以下(半径以下)となるように設定することが好ましい。
【0061】
以上の塵除去動作を実行するタイミングは、例えばカメラの電源がオンされたとき、または露光開始直前など定期的に実行させてもよい。また、撮影者が操作可能なスイッチが操作されたときに実行する構成としてもよい。さらに、露光開始直前に実行する場合と、その他の場合とで、X方向駆動信号、Y方向駆動信号を出力する時間、波形あるいは強度などの特性を異ならせてもよい。例えば、露光開始直前は出力時間を短くし、手動操作されたときは出力時間を長くするか、強く(定数aを大きく)すれば、露光の際にはシャッタタイムラグを小さくすることが可能になり、手動による塵除去開始操作の場合は塵除去能力を高めることが可能になる。
【0062】
また、X方向駆動信号、Y方向駆動信号は、デジタルデータをアナログ信号に変換して生成してもよい。この場合は、予めデジタルデータを不揮発性メモリ手段に書き込み、塵除去動作の際に制御手段CTLが読み出し、D/A変換器でアナログのX方向駆動信号、Y方向駆動信号に変換する構成としてもよい。
【0063】
以上の通り本発明の実施形態によれば、可動部50が図14の(B)に示したように可動中心部から外側に向かって渦巻き状の軌跡で運動することにより、擦動部平面上に付着した塵は可動部50の中心部に対して外方に移動して払拭されるので、動作不良の原因が除去されて、塵などが押しピン63の先端面63aと電気基板40(平滑面40a)の間、基板支持突起65の先端面65aと補強板41(平滑面41a)1との間に入り込むなどによる動作不良がなくなる。引用文献1では、塵などが一旦擦動部の隙間に入り込んでしまうと簡単には取り除くことができないが、本発明によれば、塵などが押しピン63の先端面63aと電気基板40(平滑面40a)の間、基板支持突起65の先端面65aと補強板41(平滑面41a)との間に入り込んだとしても、1回または複数回の除去動作によって取り除かれる。
【0064】
以上の実施形態では塵除去動作時に、Y方向駆動用コイルCYA、CYBに同一のY方向駆動信号を入力したが、異なるY方向駆動信号を入力して、可動部50に揺動動作を加えてもよい。
【図面の簡単な説明】
【0065】
【図1】本発明の一実施形態である手ぶれ補正装置を内蔵したデジタルカメラの縦断側面図である。
【図2】手ぶれ補正装置を前方から見た分解斜視図である。
【図3】駆動用ヨーク板を破断して示す手ぶれ補正装置の背面図である。
【図4】図3のIV-IV矢線に沿う断面図である。
【図5】図3のV-V矢線に沿う断面図である。
【図6】図3のVI-VI矢線に沿う断面図である。
【図7】ベースヨーク板及び磁石の背面図である。
【図8】図6の下半部の拡大図である。
【図9】可動部を任意の方向に移動および回動自在に支持する基板支持柱および基板支持突起の構造を示す拡大図である。
【図10】X、Y方向ぶれ及び光軸周りの回転ぶれを検出するジャイロセンサの配置例を示す、カメラボディの斜視図である。
【図11】同カメラボディの正面図である。
【図12】同カメラボディの側面図である。
【図13】X、Y方向の像ぶれ補正及び光軸に平行な軸周りの回転ぶれ補正並びに塵除去動作を行う制御回路の実施例をブロックで示す図である。
【図14】同手ぶれ補正装置の塵除去動作における可動部の移動軌跡を示す図であって、(A)は理論上の移動軌跡を、(B)は実際の移動軌跡を示す図である。
【図15】同手ぶれ補正装置に塵除去動作を行わせる際のY方向駆動信号およびX方向駆動信号の波形を示す図である。
【符号の説明】
【0066】
20 デジタルカメラ(カメラ)
30 手ぶれ補正装置(ステージ装置)
31 ベースヨーク板
32 駆動用ヨーク板
33 支柱
35 可動範囲規制ピン(可動範囲規制手段)
40 電気基板(ステージ板)
40a 平滑面
41 補強板(ステージ板)
41a 平滑面
42 可動範囲規制孔(可動範囲規制手段)
45 CCD(撮像素子)
50 可動部
61 基板支持柱
62 押しピン支柱
63 押しピン
63a 先端面
64 コイルばね
65 基板支持突起
65a 先端面
70 71 72 積分回路
73 74 75 誤差増幅回路
76 77 PID演算回路
78 79 80 81 PWMドライバ
82 積分回路
83 渦状駆動信号源
85 切換スイッチ
85a 85b Y信号スイッチ
85c X信号スイッチ
CTL 制御手段
CL 補正レンズ
CX X方向駆動用コイル(駆動部)
CYA CYB Y方向駆動用コイル(駆動部)
MCX X方向駆動用高磁束密度空間
MCY Y方向駆動用高磁束密度空間
ML 磁性流体
MX X用永久磁石
MY Y用永久磁石
SDS 振動検出センサ
SX SY ホール素子(位置センサ)
O 光軸
【特許請求の範囲】
【請求項1】
固定支持基板と、
上記固定支持基板に対して所定間隔で平行に配置されたステージ板と、
上記ステージ板の表裏に形成された平行平滑面を擦動自在に表裏側から挟圧して該ステージ板を基準平面内において任意の方向に移動自在に支持する擦動支持手段と、
上記固定支持基板と上記ステージ板とに装着された、上記ステージ板を所望の方向に移動させる駆動手段と、
この駆動手段を、上記ステージ板がその可動範囲の中心を周回する移動軌跡を描いて運動するように制御する制御手段と、を備えたことを特徴とするステージ装置。
【請求項2】
請求項1項記載のステージ装置において、ステージ板にはその両面に平行平滑面が形成され、上記擦動支持手段は、一方が固定され、他方が弾性的に付勢された部材によって上記平行平滑面を摺動自在に挟圧するステージ装置。
【請求項3】
請求項1または2記載のステージ装置において、上記駆動手段は、上記固定支持基板と上記ステージ板の一方に装着された少なくとも2個の磁束発生部材、および他方に装着された、上記各磁束発生部材が発生する磁束を受けて上記基準平面内において異なる方向に駆動力を発生する2個の駆動用コイルを備えていて、上記制御手段は、上記各駆動用コイルに所定周期の駆動信号を出力して上記ステージをその可動中心の周りを周回する移動軌跡を描いて運動させるステージ装置。
【請求項4】
請求項3記載のステージ装置において、上記磁束発生部材は、直交する方向に配置されたX方向永久磁石とY方向永久磁石とを備え、上記駆動用コイルは、上記X方向永久磁石とY方向永久磁石と対向配置されたX用駆動コイルとY用駆動コイルを備えているステージ装置。
【請求項5】
請求項1乃至4のいずれか一項記載のステージ装置において、上記移動軌跡は、上記ステージ板が可動範囲の中心から発散する渦状に周回する渦状の軌跡であるステージ装置。
【請求項6】
請求項1乃至4のいずれか一項記載のステージ装置において、上記移動軌跡は、上記ステージ板の可動範囲の中心を周回する円状の軌跡であるステージ装置。
【請求項7】
固定支持基板と、
上記固定支持基板に対して所定間隔で平行に配置されたステージ板と、
上記ステージ板の表裏に形成された平行平滑面を擦動自在に表裏側から挟圧して該ステージ板を基準平面内において任意の方向に移動自在に支持する擦動支持手段と、
上記ステージ板に装着された撮像手段と、
上記固定支持基板と上記ステージ板とに装着された、上記ステージ板を所望の方向に移動させる駆動手段と、
搭載された機器の振動を検出する振動検出手段と、
該振動検出手段の検出結果に基づいて、搭載された機器の結像光学系によって上記撮像手段に形成された被写体像のぶれが減少するように上記駆動手段をぶれ補正駆動するぶれ補正駆動制御手段と、
上記ぶれ補正駆動とは別個に、上記ステージ板がその可動範囲の中心を周回する移動軌跡を描いて運動するように上記駆動手段を駆動する塵除去駆動制御手段と、を備えたことを特徴とする手ぶれ補正装置。
【請求項8】
請求項7記載の手ぶれ補正装置において、ステージ板にはその両面に平行平滑面が形成され、上記擦動支持手段は、一方が固定され、他方が弾性的に付勢された部材によって上記平行平滑面を摺動自在に挟圧する手ぶれ補正装置。
【請求項9】
請求項7または8記載の手ぶれ補正装置において、上記駆動手段は、上記固定支持基板と上記ステージ板の一方に装着された少なくとも2個の磁束発生部材、および他方に装着された、上記各磁束発生部材が発生する磁束を受けて上記基準平面内において異なる方向に駆動力を発生する2個の駆動用コイルを備えていて、上記塵除去駆動制御手段は、上記各駆動コイルに所定周期の渦状駆動信号を出力して上記ステージ板をその可動範囲の中心の周りを周回する移動軌跡を描いて運動させる手ぶれ補正装置。
【請求項10】
請求項9記載の手ぶれ補正装置において、上記磁束発生部材は、直交する方向に配置されたX方向永久磁石とY方向永久磁石とを備え、上記駆動用コイルは、上記X方向永久磁石とY方向永久磁石に対向配置されたX用駆動コイルとY用駆動コイルを備えていて、上記塵除去駆動制御手段は、上記各X用駆動コイルおよびY用駆動コイルに所定周期の駆動信号を出力して上記ステージをその可動範囲の中心の周りを周回する移動軌跡を描いて運動させる手ぶれ補正装置。
【請求項11】
請求項10記載の手ぶれ補正装置において、上記ぶれ補正手段は、カメラの撮像光学系によって上記撮像手段に形成された被写体像のぶれが減少するように上記X用駆動コイル及びY用駆動コイルに通電して上記ステージ板を運動させ、
上記塵除去駆動制御手段は、上記ステージ板が周回状の軌跡を描いて運動するように上記X用駆動コイル及びY用駆動コイルに通電する渦状駆動信号源を備え、
上記X用駆動コイル及びY用駆動コイルへの通電を上記ぶれ補正装置と上記渦状駆動信号源との間で切り換える切換手段とを備え、
上記制御手段は、上記切換手段を、上記塵除去制御するときに上記渦状駆動信号源に切り換える手ぶれ補正装置。
【請求項12】
請求項7乃至11のいずれか一項記載の手ぶれ補正装置において、上記移動軌跡は、上記ステージ板が可動範囲の中心から発散する渦状に周回する渦状の軌跡である手ぶれ補正装置。
【請求項13】
請求項7乃至11のいずれか一項記載の手ぶれ補正装置において、上記移動軌跡は、上記ステージ板の可動範囲の中心を周回する円状の軌跡である手ぶれ補正装置。
【請求項14】
請求項12記載の手ぶれ補正装置において、上記渦状の軌跡の径方向ピッチは、上記固定部材または押圧部材棒状部材の直径の半分以下である手ぶれ補正装置。
【請求項15】
請求項7乃至14のいずれか一項記載の手ぶれ補正装置において、上記塵除去駆動制御手段は、上記塵除去動作開始時に上記ステージ板をその可動中心位置に移動させ、上記塵除去動作終了後、上記ステージ板を可動範囲の中心に移動させる手ぶれ補正装置。
【請求項16】
請求項7乃至15のいずれか一項記載の手ぶれ補正装置において、上記塵除去駆動制御手段は、搭載されたカメラの電源がオンされたとき、露光直前、可動ミラーアップ動作中、あるいは露光終了後、または所定のスイッチ操作を受けたときに上記塵除去動作を所定時間実行する手ぶれ補正装置。
【請求項17】
固定支持基板に対して所定間隔で平行に配置され、かつ基準平面内において任意の方向に移動自在に支持されたステージ板を備えたステージ装置の駆動方法であって、
上記ステージ板を、その可動範囲の中心を周回する移動軌跡を描いて運動させること、を特徴とするステージ装置の駆動方法。
【請求項1】
固定支持基板と、
上記固定支持基板に対して所定間隔で平行に配置されたステージ板と、
上記ステージ板の表裏に形成された平行平滑面を擦動自在に表裏側から挟圧して該ステージ板を基準平面内において任意の方向に移動自在に支持する擦動支持手段と、
上記固定支持基板と上記ステージ板とに装着された、上記ステージ板を所望の方向に移動させる駆動手段と、
この駆動手段を、上記ステージ板がその可動範囲の中心を周回する移動軌跡を描いて運動するように制御する制御手段と、を備えたことを特徴とするステージ装置。
【請求項2】
請求項1項記載のステージ装置において、ステージ板にはその両面に平行平滑面が形成され、上記擦動支持手段は、一方が固定され、他方が弾性的に付勢された部材によって上記平行平滑面を摺動自在に挟圧するステージ装置。
【請求項3】
請求項1または2記載のステージ装置において、上記駆動手段は、上記固定支持基板と上記ステージ板の一方に装着された少なくとも2個の磁束発生部材、および他方に装着された、上記各磁束発生部材が発生する磁束を受けて上記基準平面内において異なる方向に駆動力を発生する2個の駆動用コイルを備えていて、上記制御手段は、上記各駆動用コイルに所定周期の駆動信号を出力して上記ステージをその可動中心の周りを周回する移動軌跡を描いて運動させるステージ装置。
【請求項4】
請求項3記載のステージ装置において、上記磁束発生部材は、直交する方向に配置されたX方向永久磁石とY方向永久磁石とを備え、上記駆動用コイルは、上記X方向永久磁石とY方向永久磁石と対向配置されたX用駆動コイルとY用駆動コイルを備えているステージ装置。
【請求項5】
請求項1乃至4のいずれか一項記載のステージ装置において、上記移動軌跡は、上記ステージ板が可動範囲の中心から発散する渦状に周回する渦状の軌跡であるステージ装置。
【請求項6】
請求項1乃至4のいずれか一項記載のステージ装置において、上記移動軌跡は、上記ステージ板の可動範囲の中心を周回する円状の軌跡であるステージ装置。
【請求項7】
固定支持基板と、
上記固定支持基板に対して所定間隔で平行に配置されたステージ板と、
上記ステージ板の表裏に形成された平行平滑面を擦動自在に表裏側から挟圧して該ステージ板を基準平面内において任意の方向に移動自在に支持する擦動支持手段と、
上記ステージ板に装着された撮像手段と、
上記固定支持基板と上記ステージ板とに装着された、上記ステージ板を所望の方向に移動させる駆動手段と、
搭載された機器の振動を検出する振動検出手段と、
該振動検出手段の検出結果に基づいて、搭載された機器の結像光学系によって上記撮像手段に形成された被写体像のぶれが減少するように上記駆動手段をぶれ補正駆動するぶれ補正駆動制御手段と、
上記ぶれ補正駆動とは別個に、上記ステージ板がその可動範囲の中心を周回する移動軌跡を描いて運動するように上記駆動手段を駆動する塵除去駆動制御手段と、を備えたことを特徴とする手ぶれ補正装置。
【請求項8】
請求項7記載の手ぶれ補正装置において、ステージ板にはその両面に平行平滑面が形成され、上記擦動支持手段は、一方が固定され、他方が弾性的に付勢された部材によって上記平行平滑面を摺動自在に挟圧する手ぶれ補正装置。
【請求項9】
請求項7または8記載の手ぶれ補正装置において、上記駆動手段は、上記固定支持基板と上記ステージ板の一方に装着された少なくとも2個の磁束発生部材、および他方に装着された、上記各磁束発生部材が発生する磁束を受けて上記基準平面内において異なる方向に駆動力を発生する2個の駆動用コイルを備えていて、上記塵除去駆動制御手段は、上記各駆動コイルに所定周期の渦状駆動信号を出力して上記ステージ板をその可動範囲の中心の周りを周回する移動軌跡を描いて運動させる手ぶれ補正装置。
【請求項10】
請求項9記載の手ぶれ補正装置において、上記磁束発生部材は、直交する方向に配置されたX方向永久磁石とY方向永久磁石とを備え、上記駆動用コイルは、上記X方向永久磁石とY方向永久磁石に対向配置されたX用駆動コイルとY用駆動コイルを備えていて、上記塵除去駆動制御手段は、上記各X用駆動コイルおよびY用駆動コイルに所定周期の駆動信号を出力して上記ステージをその可動範囲の中心の周りを周回する移動軌跡を描いて運動させる手ぶれ補正装置。
【請求項11】
請求項10記載の手ぶれ補正装置において、上記ぶれ補正手段は、カメラの撮像光学系によって上記撮像手段に形成された被写体像のぶれが減少するように上記X用駆動コイル及びY用駆動コイルに通電して上記ステージ板を運動させ、
上記塵除去駆動制御手段は、上記ステージ板が周回状の軌跡を描いて運動するように上記X用駆動コイル及びY用駆動コイルに通電する渦状駆動信号源を備え、
上記X用駆動コイル及びY用駆動コイルへの通電を上記ぶれ補正装置と上記渦状駆動信号源との間で切り換える切換手段とを備え、
上記制御手段は、上記切換手段を、上記塵除去制御するときに上記渦状駆動信号源に切り換える手ぶれ補正装置。
【請求項12】
請求項7乃至11のいずれか一項記載の手ぶれ補正装置において、上記移動軌跡は、上記ステージ板が可動範囲の中心から発散する渦状に周回する渦状の軌跡である手ぶれ補正装置。
【請求項13】
請求項7乃至11のいずれか一項記載の手ぶれ補正装置において、上記移動軌跡は、上記ステージ板の可動範囲の中心を周回する円状の軌跡である手ぶれ補正装置。
【請求項14】
請求項12記載の手ぶれ補正装置において、上記渦状の軌跡の径方向ピッチは、上記固定部材または押圧部材棒状部材の直径の半分以下である手ぶれ補正装置。
【請求項15】
請求項7乃至14のいずれか一項記載の手ぶれ補正装置において、上記塵除去駆動制御手段は、上記塵除去動作開始時に上記ステージ板をその可動中心位置に移動させ、上記塵除去動作終了後、上記ステージ板を可動範囲の中心に移動させる手ぶれ補正装置。
【請求項16】
請求項7乃至15のいずれか一項記載の手ぶれ補正装置において、上記塵除去駆動制御手段は、搭載されたカメラの電源がオンされたとき、露光直前、可動ミラーアップ動作中、あるいは露光終了後、または所定のスイッチ操作を受けたときに上記塵除去動作を所定時間実行する手ぶれ補正装置。
【請求項17】
固定支持基板に対して所定間隔で平行に配置され、かつ基準平面内において任意の方向に移動自在に支持されたステージ板を備えたステージ装置の駆動方法であって、
上記ステージ板を、その可動範囲の中心を周回する移動軌跡を描いて運動させること、を特徴とするステージ装置の駆動方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2008−129326(P2008−129326A)
【公開日】平成20年6月5日(2008.6.5)
【国際特許分類】
【出願番号】特願2006−314225(P2006−314225)
【出願日】平成18年11月21日(2006.11.21)
【出願人】(000000527)ペンタックス株式会社 (1,878)
【Fターム(参考)】
【公開日】平成20年6月5日(2008.6.5)
【国際特許分類】
【出願日】平成18年11月21日(2006.11.21)
【出願人】(000000527)ペンタックス株式会社 (1,878)
【Fターム(参考)】
[ Back to top ]