
チャック装置
【課題】制御部においてワークの把持が誤って認識されることを簡単な構成にて防止する。
【解決手段】チャック装置5は、爪部62を、待機位置から把持位置へと向かう方向へ連続的に移動することによりワークを把持する把持部50を備え、把持部50には把持検出部51および判定回路52が取り付けられる。把持検出部51では、爪部62の待機位置からの移動において、爪部62が把持位置に到達した時にON信号が出力され、万一、把持位置を超えた場合にON信号の出力が停止される。判定回路52では、把持検出部51からのON信号の入力が所定時間継続した場合にのみ、ワークの把持を示す把持信号が外部の制御部12に向けて出力される。これにより、ワークが把持されていないにもかかわらず、爪部62が把持位置を通過する際に発生するON信号に起因して、制御部12においてワークの把持が誤って認識されることを、簡単な構成にて防止することができる。
【解決手段】チャック装置5は、爪部62を、待機位置から把持位置へと向かう方向へ連続的に移動することによりワークを把持する把持部50を備え、把持部50には把持検出部51および判定回路52が取り付けられる。把持検出部51では、爪部62の待機位置からの移動において、爪部62が把持位置に到達した時にON信号が出力され、万一、把持位置を超えた場合にON信号の出力が停止される。判定回路52では、把持検出部51からのON信号の入力が所定時間継続した場合にのみ、ワークの把持を示す把持信号が外部の制御部12に向けて出力される。これにより、ワークが把持されていないにもかかわらず、爪部62が把持位置を通過する際に発生するON信号に起因して、制御部12においてワークの把持が誤って認識されることを、簡単な構成にて防止することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ワークを把持するチャック装置に関する。
【背景技術】
【0002】
従来より、自動組立ライン等において組立ロボットが用いられており、組立ロボットでは、ワークを把持するロボットハンドがロボットアームに接続されることにより、ロボットハンドが3次元的に移動可能とされる。ロボットハンドでは、圧縮エアを用いたチャック装置の駆動により、ワークの把持および解放が行われる。
【0003】
また、特許文献1では、チャック装置において、ワークが適切に把持されているか否かを検出する手法が開示されている。具体的には、一方のフィンガに第1の電極部材および連結電極が取り付けられ、他方のフィンガに第2の電極部材および当接部材が取り付けられる。両フィンガがワークを挟持する位置にある時には、連結電極が第2の電極部材に当接し、第1の電極部材が連結電極を介して第2の電極部材と導通する。また、フィンガが全開位置にある時には連結電極が第2の電極部材と離間し、閉位置にある時には当接部材により第1の電極部材が連結電極と離間する。これにより、ワークが適切に把持されたか否かが正確かつ容易に検出される。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特許第3992636号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、特許文献1のチャック装置のように、爪部が全開位置からワークを把持する把持位置に到達した時にON信号が出力され、爪部が把持位置を超えた際にON信号の出力が停止される場合、仮に爪部がワークを把持し損ねても、把持位置を通過する時にON信号が一瞬出力されるため、ON信号が入力される外部の制御部において、ワークの把持が誤って認識される虞がある。
【0006】
本発明は上記課題に鑑みなされたものであり、ワークが把持されていないにもかかわらず、制御部においてワークの把持が誤って認識されることを簡単な構成にて防止することを目的としている。
【課題を解決するための手段】
【0007】
請求項1に記載の発明は、ワークを把持するチャック装置であって、ワークの把持に使用される爪部を有し、前記爪部を、待機位置から把持位置へと向かう方向へ連続的に移動することによりワークを把持する把持部と、前記爪部が前記待機位置から前記把持位置に到達した時にON信号を出力する把持検出部と、前記把持検出部からのON信号が入力される判定回路とを備え、前記爪部の前記待機位置から前記把持位置へと向かう移動において、前記爪部が前記把持位置を超えた場合に前記把持検出部がON信号の出力を停止し、前記判定回路が、ON信号の入力が所定時間継続した場合に、ワークの把持を示す把持信号を、外部の制御部に向けて出力する。
【0008】
請求項2に記載の発明は、請求項1に記載のチャック装置であって、前記把持部と同様の構成である他の把持部と、前記把持検出部と同様の構成であり、前記他の把持部に関するON信号を出力する他の把持検出部とをさらに備え、前記判定回路に前記他の把持検出部からのON信号が入力され、前記判定回路が、前記把持検出部および前記他の把持検出部の双方から前記所定時間継続するON信号が入力された場合に、前記把持信号を出力する。
【0009】
請求項3に記載の発明は、請求項2に記載のチャック装置であって、前記判定回路が、前記把持検出部および前記他の把持検出部のそれぞれからのON信号の入力を示す表示部を備える。
【0010】
請求項4に記載の発明は、請求項1ないし3のいずれかに記載のチャック装置であって、前記把持部が、前記爪部の移動をガイドするガイド部と、前記ガイド部が固定され、前記爪部を移動させる駆動部を有する把持本体部とを備え、前記判定回路が、前記把持本体部に配置される。
【0011】
請求項5に記載の発明は、請求項1ないし4のいずれかに記載のチャック装置であって、前記把持部が、ワークを把持する際に待機位置から把持位置へと向かう方向へ連続的に移動する他の爪部を有し、ワークを把持する際の前記他の爪部の移動方向と前記爪部の移動方向とが逆向きであり、前記把持検出部が、検出光を出射する出射部と、前記検出光を受光する受光部と、前記爪部に固定された遮蔽部と、前記他の爪部に固定された他の遮蔽部とを備え、前記爪部が前記待機位置から前記把持位置に到達するまで、前記遮蔽部により、前記検出光の前記受光部への入射が遮蔽され、前記爪部が前記把持位置に位置する間、前記検出光が前記受光部に入射し、前記爪部が前記把持位置を超えた場合に、前記他の遮蔽部により、前記検出光の前記受光部への入射が遮蔽される。
【発明の効果】
【0012】
本発明によれば、ワークが把持されていないにもかかわらず、制御部においてワークの把持が誤って認識されることを簡単な構成にて防止することができる。
【図面の簡単な説明】
【0013】
【図1】第1の実施の形態に係る組立ロボット1の側面図である。
【図2】チャック装置を示す図である。
【図3】チャック装置を示す図である。
【図4】爪部の動作を説明するための図である。
【図5】爪部の動作を説明するための図である。
【図6】把持検出部における動作を説明するための図である。
【図7】把持検出部における動作を説明するための図である。
【図8】把持検出部における動作を説明するための図である。
【図9】第2の実施の形態に係るチャック装置を示す図である。
【図10】チャック装置の他の例を示す図である。
【発明を実施するための形態】
【0014】
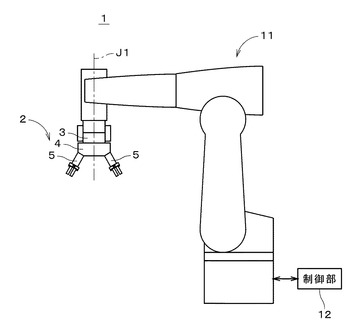
図1は、本発明の第1の実施の形態に係る組立ロボット1の側面図である。組立ロボット1は、多数の部品から構成される組立体を自動的に組み立てる自動組立ライン等において用いられる産業用ロボットである。図1の組立ロボット1は、多自由度(例えば、6自由度)のロボットアーム11、ロボットアーム11の先端に着脱可能に取り付けられるロボットハンド2、および、組立ロボット1の全体制御を担う制御部12を備え、ロボットアーム11によりロボットハンド2が自在に移動可能である。ロボットハンド2は、ロボットアーム11に取り付けられるハンド本体部3、および、ハンド本体部3に着脱自在に装着されるハンド先端部4を備える。組立ロボット1では、ハンド先端部4が所定の中心軸J1を中心としてハンド本体部3の一部と共に回転可能である。ハンド先端部4において図1中の下側(重力方向の下側であるとは限らない。以下同様。)の部位には、ワークを把持する複数のチャック装置5が中心軸J1を中心とする周方向に等角度間隔にて取り付けられる。
【0015】
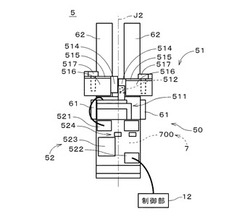
図2および図3はハンド先端部4から取り外した状態におけるチャック装置5の外観を示す図である。図2は正面から見たチャック装置5を示し、図3は側方から見たチャック装置5を示す。図2および図3では後述の爪部62を上側に配置してチャック装置5を図示している。
【0016】
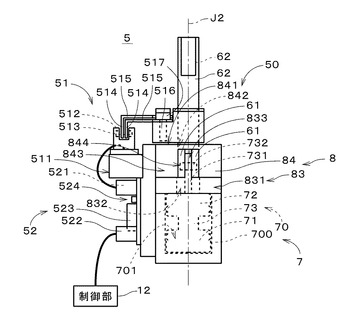
図3に示すチャック装置5は、複数の(本実施の形態では、2つの)爪部62にてワークを把持する把持部50を備える。把持部50は、2つの爪部62にそれぞれ接続される2つの板カム部61(後述の図4および図5参照)、爪部62を駆動させる把持本体部7、並びに、把持本体部7に固定されるとともに爪部62の移動をガイドするガイド部8を有する。把持本体部7は、外形が直方体である本体700を有し、本体700には有底の穴部701が形成される。穴部701の側面は所定の中心軸J2を中心とする円筒面であり、穴部701内にはピストンユニット70が挿入される。ピストンユニット70は、中心軸J2を中心とする円板状のピストン部71を有し、ピストン部71の爪部62側(図3中の上側)の主面上には中心軸J2を中心とする円柱状の軸部73が設けられる。
【0017】
ピストンユニット70は、中心軸J2を中心とする円環状の環状部材72をさらに有し、軸部73が環状部材72に挿入される。環状部材72は穴部701の開口縁近傍に固定され、穴部701の開口が閉塞される。また、環状部材72の内周面にはパッキンが設けられ、軸部73を中心軸J2に沿って移動可能としつつ、環状部材72の内周面と軸部73との間が密閉される。また、環状部材72の外周面にもパッキンが設けられ、環状部材72の外周面と穴部701の側面との間が密閉される。
【0018】
本体700において、穴部701の底面には内部流路の内部開口が形成され、当該内部流路は電磁弁(ここでは、5ポート2ポジションのシングルソレノイド)に接続される。また、穴部701の側面上においてピストン部71と環状部材72との間の位置(軸部73に対向する位置)にも他の内部流路の内部開口が形成され、当該内部流路は同じ電磁弁に接続される。チャック装置5では、電磁弁のON/OFFを切り替えることにより一方の内部開口から穴部701内に圧縮エアが供給され、他方の内部開口近傍が大気圧に開放される。したがって、電磁弁のON/OFFを制御することにより、ピストン部71が軸部73と共に中心軸J2に沿って進退する。
【0019】
軸部73の爪部62側の端部731(後述するように板カム部61と係合するため、以下、「係合端部731」という。)は薄い板状である。また、係合端部731には貫通孔が形成されており、ピン732が当該貫通孔内に挿入される。ピン732の両端は係合端部731の両主面から突出する。
【0020】
図3に示すように、ガイド部8は、中間部83および蓋部材84を有する。中間部83は、ピストンユニット70の環状部材72上に設けられる板状部材831を有し、板状部材831の中央には軸部73との干渉を避ける貫通孔832が形成される。また、板状部材831の爪部62側の主面上には、薄板状の2つのスペーサ板833(図3では、1つのスペーサ板833のみを示している。)が直立した状態で貫通孔832の周囲に配置される。チャック装置5では、係合端部731が2つのスペーサ板833の間に配置され、板状の係合端部731および2つのスペーサ板833は中心軸J2を含む同一平面(図3の紙面に垂直な平面)上に位置する。
【0021】
2つの板カム部61は、係合端部731および2つのスペーサ板833を間に介在させて向かい合うように、直立した状態で板状部材831上に配置される。また、各板カム部61にはカム孔611(後述の図4および図5参照)が形成されており、2つの板カム部61のカム孔611に係合端部731のピン732の両端が挿入される。
【0022】
蓋部材84は、ブロック状の部材において2つの板カム部61が配置される部位をくり貫いた形状であり、板カム部61に垂直かつ中心軸J2を含む断面が2つの板カム部61を跨ぐような形状である。図3に示す蓋部材84において、板カム部61に垂直な2つの側面843のそれぞれには、板カム部61との干渉を避ける開口844が形成される。また、蓋部材84における図3中の上側の面841には、爪部62との干渉を避ける開口842が形成される。
【0023】
後述するように、図3のチャック装置5では、ピストンユニット70の軸部73の中心軸J2に沿う移動により、ピン732が係合されたカム孔611に従って各板カム部61が爪部62と共に、図2中の横方向(図3では、紙面に垂直な方向であり、以下、「爪移動方向」という。)に移動する。このとき、板カム部61および板カム部61に接続された爪部62の爪移動方向への移動は、図3に示す中間部83の2つのスペーサ板833および板状部材831、並びに、蓋部材84の内面(すなわち、板カム部61に対向する面)および開口844の縁によりガイドされる。以上のように、図3のピストンユニット70は爪部62を爪移動方向に移動させる駆動部であり、ガイド部8の中間部83および蓋部材84が、板カム部61および爪部62の爪移動方向への移動をガイドする。
【0024】
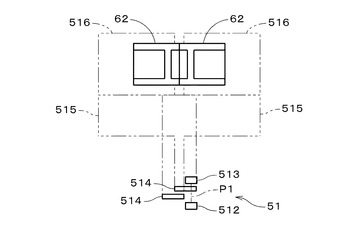
図2および図3に示すように、チャック装置5は、爪部62が爪移動方向の所定位置(後述の把持位置)へと到達した際にON信号を出力する把持検出部51、および、把持検出部51からのON信号が入力される判定回路52をさらに備える。把持検出部51は、把持部50に固定された支持部511、支持部511上に設けられる出射部512および受光部513(本実施の形態では、1つのフォトカプラに含まれる出射部および受光部)、並びに、2つの爪部62にそれぞれ固定される2つの遮蔽部514を有する。
【0025】
2つの遮蔽部514は爪移動方向の幅が同じ、かつ、互いに平行な板状であり、主面の法線方向(図3中の横方向であり、出射部512と受光部513との間の後述の光軸に平行な方向である。)に僅かにずれて配置される。各遮蔽部514は支持板515および固定部516を介して爪部62に固定されており、爪部62と共に爪移動方向に移動する。出射部512は受光部513に向けて検出光を出射し、後述するように、出射部512と受光部513との間の光軸上にいずれの遮蔽部514も位置しない時に、受光部513にて検出光が受光され、ON信号が出力される。
【0026】
把持本体部7に固定される回路基板上に形成される判定回路52は、図2に示すように、把持検出部51に接続される接続部521、制御部12に接続される通信部522、把持検出部51からのON信号に対して所定の処理を施す処理部523、および、把持検出部51からのON信号の入力を示す表示部524を有する。表示部524には、発光素子(例えば、LED(発光ダイオード))が設けられる。
【0027】
次に、チャック装置5における爪部62の動作について説明する。図4および図5は爪部62の動作を説明するための図であり、図4および図5では説明の便宜上、係合端部731、板カム部61および爪部62のみを図示している。
【0028】
図3に示すピストン部71および軸部73が爪部62側に向かって中心軸J2に沿って連続的に移動すると、図4に示す係合端部731が図4中の上側に移動し、ピン732が係合するカム孔611に従って、2つの爪部62が近づくように板カム部61および爪部62が爪移動方向(図4中の横方向)に連続的に移動する。これにより、図5に示すように2つの爪部62がほぼ接触する(近接を含む。)。また、ピストン部71および軸部73が穴部701の底面側に向かって中心軸J2に沿って移動すると、2つの爪部62が互いに離間するように板カム部61および爪部62が爪移動方向に連続的に移動し、図4に示す状態に戻される。平行チャックである把持部50では、一方の爪部62の移動方向と他方の爪部62の移動方向とが逆向きとなる。
【0029】
実際には、2つの爪部62が最も離れた図4に示す全開位置から、最も接近した図5に示す閉位置へと移動する途中に、2つの爪部62の間にワークが挟まれるため、正常にワークが把持される際には、2つの爪部62は図5に示す閉位置まで移動しない。また、ワークを把持した状態にて、係合端部731を爪部62から離れるように中心軸J2に沿って移動する(すなわち、ピストン部71を穴部701の底面側に向かって移動する)ことにより、各爪部62が図4に示す全開位置へと移動し、ワークが解放される。図4に示す全開位置は、ワークの把持前の待機時における各爪部62の位置であるため、以下、「待機位置」という。また、ワークが正常に把持される際の各爪部62の位置を、以下、「把持位置」という。
【0030】
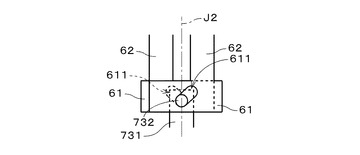
次に、把持検出部51および判定回路52における動作について説明する。図6ないし図8は、把持検出部51における動作を説明するための図である。図6ないし図8では、爪部62側からチャック装置5を見た場合における爪部62、遮蔽部514、出射部512および受光部513を実線にて示し、固定部516および支持板515を二点鎖線にて示し、他の構成要素の図示を省略している。
【0031】
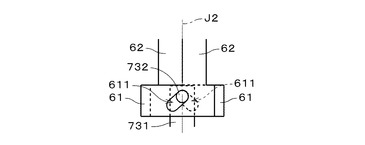
図6に示すように、2つの爪部62が爪移動方向(図6中の横方向)に最も離れた待機位置では、出射部512と受光部513との間の光軸P1上に一方の遮蔽部514が位置するため、受光部513では検出光が受光されず、ON信号は出力されない。続いて、各爪部62が待機位置から把持位置へと向かう方向へ連続的に移動すると、図7中にて二点鎖線にて示すワーク91が2つの爪部62により把持(狭持)される。2つの爪部62は、互いに接触する閉位置までは移動せず、図7に示す位置(すなわち、把持位置)にて停止する。なお、各爪部62において他方の爪部62に対向する面には溝部621が形成され、ワーク91は2つの溝部621間にてしっかりと保持される。
【0032】
このとき、2つの遮蔽部514が光軸P1から爪移動方向にずれた位置にて全体的に重なり、いずれの遮蔽部514も光軸P1上に位置しない。これにより、受光部513にて検出光が受光され、ON信号が判定回路52に出力される。受光部513では、検出光が受光される間中、ON信号が継続して出力される。図2の処理部523では、把持検出部51からのON信号の入力が所定時間継続したことが確認されると、ワーク91の把持を示す把持信号が生成されて、通信部522から外部の制御部12に向けて出力される。把持信号の出力は、把持検出部51からのON信号の入力が途絶えるまで継続される。また、ON信号の入力が継続する間、表示部524の発光素子が点灯し、作業者においてON信号の発生が確認可能である。制御部12は、把持信号を確認してワーク91の把持が正常に行われたと認識した後(または、認識動作と並行して)、図1のロボットアーム11によりロボットハンド2を組立体(組立途上の組立体)の近傍に配置する。
【0033】
把持部50にてワーク91を解放する際には、2つの爪部62が把持位置から待機位置へと向かう方向へ連続的に移動し、図6に示すように2つの爪部62が互いに離れる。このとき、爪部62が把持位置から離れた直後に、光軸P1上に遮蔽部514が位置するため、検出光が遮蔽されてON信号の出力が停止される。判定回路52では、ON信号の入力が途絶えることより把持信号の出力が停止される。これにより、制御部12においてワーク91の解放が認識される。
【0034】
一方、把持部50によりワークを把持し損ねた場合、2つの爪部62は図6に示す待機位置から図7に示す把持位置を通過して図8に示す閉位置へと移動する。2つの爪部62の間の爪移動方向の距離がワーク91(図7参照)の爪移動方向の幅よりも小さい状態では、光軸P1上に1つの遮蔽部514(正確には、図6において光軸P1上に位置するものとは異なる遮蔽部514)が位置するため、受光部513では検出光が受光されず、ON信号は出力されない。
【0035】
このとき、爪部62が図7に示す把持位置を通過する極短い時間において、受光部513にて検出光が受光されてON信号が図2の判定回路52に出力されるが、爪部62は連続的に移動し、ON信号の入力が所定時間継続しないため、処理部523では把持信号は生成されない。処理部523における処理は、把持検出部51からのON信号に対して継続時間が短いものを除外するフィルタ処理であると捉えることができる。制御部12では、判定回路52から把持信号が入力されないことにより、ワーク91の把持が正常に行われなかったと認識され、ワーク91の把持動作の再実行等、所定の動作が行われる。
【0036】
以上に説明したように、チャック装置5の把持検出部51では、爪部62の待機位置から把持位置へと向かう移動において、爪部62が把持位置に到達した時にON信号が出力され、万一、爪部62が把持位置を超えた場合にON信号の出力が停止される。また、判定回路52が、爪部62を移動する把持本体部7に設けられ、判定回路52では、把持検出部51からのON信号の入力が所定時間継続した場合にのみ、ワーク91の把持を示す把持信号が外部の制御部12に向けて出力される。これにより、ワーク91が把持されていないにもかかわらず、爪部62が把持位置を通過する際に発生する短時間のON信号に起因して、制御部12においてワーク91の把持が誤って認識されることを、簡単な構成にて防止することができる。
【0037】
また、組立対象の製品の変更に合わせてチャック装置5を他のチャック装置に交換する場合であっても、これらのチャック装置では、判定回路が把持部の把持本体部に配置され、把持検出部も把持部に接続されることにより、チャック装置を交換する際に、把持部と一体的に判定回路および把持検出部が取り外され、他の把持部と一体的に他の判定回路および把持検出部が取り付けられる。これにより、把持部の構造に合った判定回路および把持検出部に速やかに交換することができる。
【0038】
さらに、チャック装置5では、爪部62が待機位置から把持位置に到達するまで、一方の遮蔽部514により、検出光の受光部513への入射が遮蔽され、爪部62が把持位置に位置する間、検出光が受光部513に入射し、爪部62が把持位置を超えた場合に、他方の遮蔽部514により、検出光の受光部513への入射が遮蔽される。これにより、把持検出部51にてON信号の出力が開始される際の爪部62の位置と、爪部62が把持位置を超えてON信号の出力が停止される際の爪部62の位置とを独立して決定することができる。
【0039】
実際には、各遮蔽部514が接続された支持板515は、図2および図3に示すボルト517により固定部516に固定されており、ボルト517を緩めて、各爪部62に対する遮蔽部514の爪移動方向の相対位置を微調整することが可能となっている。また、判定回路52には、把持検出部51からのON信号の入力を示す表示部524が設けられる。よって、チャック装置5では、表示部524の状態を参照しつつ遮蔽部514の爪部62に対する相対位置を個別に微調整して、把持検出部51においてON信号が出力される位置(すなわち、把持位置)の範囲を容易に、かつ、高精度に設定することが可能となる。
【0040】
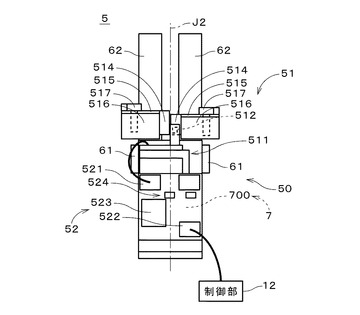
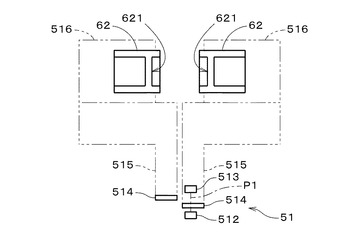
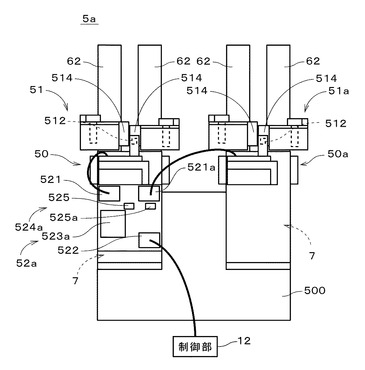
図9は、本発明の第2の実施の形態に係るチャック装置5aを示す図であり、図2と同様に、ハンド先端部4(図1参照)から取り外した状態におけるチャック装置5aの外観を示す。図9のチャック装置5aは、ハンド先端部4に接続されるベースブロック500を有し、同様の構成である2つの把持部50,50aがベースブロック500に固定される。実際のロボットハンド2では、ハンド先端部4における図1中の下側の部位に、複数のチャック装置5aのベースブロック500が中心軸J1を中心とする周方向に等角度間隔にて取り付けられ、爪部62は下側に配置される。
【0041】
一方の把持部50には、図2の把持部50と同様に把持検出部51および判定回路52aが取り付けられ、他方の把持部50aには、把持検出部51と同様の構成である把持検出部51aのみが取り付けられる。把持部50の判定回路52aでは、2つの接続部521,521aが、2つの把持部50,50aの把持検出部51,51aにそれぞれ接続される。
【0042】
図9のチャック装置5aでは、2つの把持部50,50aがベースブロック500内の流路(図示省略)を介して同じ電磁弁に接続されており、2つの把持部50,50aにて爪部62が同時に移動する。したがって、ワークを把持する際には、2つの把持部50,50aにおいて同時に爪部62が待機位置から把持位置へと向かい、2つのワークがそれぞれ把持される。このとき、一方の把持検出部51では、出射部512からの検出光が受光部513(図3参照)にて受光されることによりON信号が判定回路52aに出力され、他方の把持検出部51aでも、出射部512からの検出光が受光部にて受光されることによりON信号が判定回路52aに出力される。
【0043】
判定回路52aの処理部523aでは、双方の把持検出部51,51aからのON信号の入力が所定時間継続したことが確認されると、ワークの把持を示す把持信号が生成されて、通信部522から外部の制御部12に向けて出力される。判定回路52aには、2つの発光素子525,525aを有する表示部524aが設けられており、2つの発光素子525,525aは2つの接続部521,521aにそれぞれ対応する。各把持検出部51,51aからのON信号の入力が継続する間、対応する発光素子525,525aが点灯し、作業者においてON信号の発生が容易に確認可能となる。
【0044】
一方、いずれか1つの把持部50,50a(または、双方の把持部50,50a)にてワークを適切に把持し損ねた場合、図6ないし図8を参照して説明したように、当該把持部の2つの爪部62が把持位置を通過する極短い時間において、当該把持部に接続された把持検出部からON信号が判定回路52aに出力されるが、爪部62は連続的に移動し、ON信号の出力は所定時間継続しないため、判定回路52aの処理部523aでは把持信号は生成されない。これにより、制御部12では、ワークの把持が正常に行われなかったと認識される。なお、ワークを把持し損ねた把持部50,50aに対応する発光素子525,525aは消灯した状態となる。組立ロボット1では、必要に応じてワークの把持動作の再実行等、所定の動作が行われる。
【0045】
以上に説明したように、図9のチャック装置5aでは、2つの把持部50,50aに関するON信号をそれぞれ出力する2つの把持検出部51,51aが設けられ、2つの把持検出部51,51aからのON信号が1つの判定回路52aに入力される。そして、2つの把持検出部51,51aの双方から所定時間継続するON信号が入力された場合に、把持信号が制御部12に出力される。これにより、把持部50,50aの一方または双方にてワークが把持されていないにもかかわらず、爪部62が把持位置を通過する際に発生するON信号に起因して、制御部12においてワークの把持が誤って認識されることを、簡単な構成にて防止することができる。
【0046】
また、複数の把持部50,50aが設けられるチャック装置5aでは、判定回路52aが、一方の把持部50の把持本体部7に配置されることにより、判定回路52aが把持部50,50aから離れた位置に配置される場合に比べて、把持検出部51,51aと判定回路52aとの間の配線を簡素化することができる。
【0047】
ここで、判定回路52aが設けられず、2つの把持検出部51,51aが制御部12に直接接続され、制御部12において2つの把持部50,50aにおけるワークの把持状態を判定する比較例の装置を想定する。比較例の装置では、把持部50,50aの調整(例えば、爪部62に対する遮蔽部514の相対位置の微調整)の際に、対応する把持検出部51,51aがON信号を出力しているか否かを確認することが容易ではなく、把持検出部51,51aにおけるON信号の出力の有無を、制御部12のモニタに表示するプログラム等を準備する必要がある。
【0048】
これに対し、図9のチャック装置5aでは、把持検出部51,51aのそれぞれからのON信号の入力を示す表示部524aが判定回路52aに設けられる。これにより、各把持検出部51,51aにおけるON信号の出力の有無を容易に確認することができ、把持部50,50aの調整を効率よく行うことが可能となる。
【0049】
次に、ロボットハンド2において、組立対象の製品の変更に応じて図2のチャック装置5と図9のチャック装置5aとが交換可能である(または、チャック装置を有するハンド先端部ごと交換される)場合について述べる。
【0050】
この場合において、チャック装置5,5aにて判定回路52,52aが設けられず、各把持検出部が制御部12に直接接続される比較例を想定すると、図2のチャック装置5を用いるときには、制御部12では、当該チャック装置5からの1つのON信号の入力が一定時間継続したことを確認して、ワークが把持されたと認識される。また、図9のチャック装置5aを用いるときには、当該チャック装置5aからの2つのON信号のそれぞれの入力が一定時間継続したことを確認して、ワークが把持されたと認識される。したがって、比較例の場合、チャック装置5,5aを交換する際に、制御部12における回路やプログラムの変更等の煩雑な作業が必要となる。なお、2つの把持部を有するチャック装置において、2つの把持検出部を直列に接続し、さらに、後段の把持検出部を制御部12に接続して、2つの把持検出部の双方にてON信号が発生する場合に1つの信号のみが制御部12に入力されるような設計を採用することも考えられる。しかしながら、この場合、上述した把持部の調整の際に、ON信号の出力の有無を、2つの把持検出部にて個別に確認することができなくなる。
【0051】
これに対し、判定回路52,52aが設けられる上記チャック装置5,5aでは、図2のチャック装置5を用いる場合、および、図9のチャック装置5aを用いる場合の双方において、1つの把持信号が制御部12に出力される。したがって、上記チャック装置5,5aを交換可能に用いる組立ロボット1では、制御部12における回路やプログラムの変更等の煩雑な作業を行うことなく、組立対象の製品の変更に容易に対応することが可能となる。
【0052】
以上、本発明の実施の形態について説明してきたが、本発明は上記実施の形態に限定されるものではなく、様々な変形が可能である。
【0053】
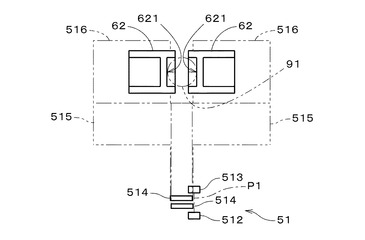
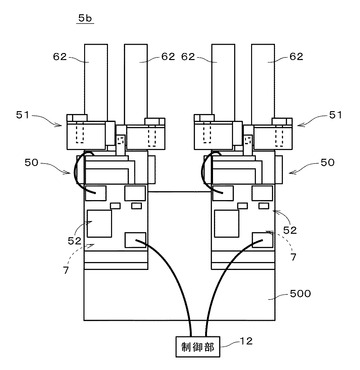
チャック装置において2つの把持部が設けられる場合に、図10に示すように、各把持部50に対して判定回路52が設けられてもよい。図10のチャック装置5bでは、2つの把持部50においてワークの把持状態を個別に、かつ、確実に判定することが可能となる。また、チャック装置の設計によっては、図10のチャック装置5bにおいて、一方の把持部50の把持検出部51を他方の把持部50の判定回路52に接続することにより、図9のチャック装置5aと同じ機能が実現可能とされてもよい。この場合、当該一方の把持部50の判定回路52は利用されない。
【0054】
図9および図10のチャック装置5a,5bでは、3以上の把持部が設けられてもよい。また、把持部において3以上の爪部が設けられてもよい。さらに、複数の爪部を有する把持部において、1つの爪部のみが移動可能とされ、他の爪部は把持本体部に固定されてもよい。すなわち、チャック装置では、ワークの把持に使用される少なくとも1つの爪部が待機位置から把持位置へと向かう方向へ連続的に移動することによりワークが把持される。
【0055】
チャック装置5,5a,5bでは、複数の爪部62が互いに最も離間した待機位置から把持位置へと移動することにより、いわゆる外掴みにてワークが把持されるが、例えば、環状の部材を把持する際に、複数の爪部が互いに最も近接した待機位置から、互いに離れるように移動して、ワークが把持されてもよい。
【0056】
上記第1および第2の実施の形態では、把持部50,50aが板カム部を有することにより、把持部50,50aの構成を簡素化することができるが、チャック装置の設計によっては、他の機構(例えば、リンク機構)により、軸部の中心軸J2方向への移動による爪部の移動が実現されてもよい。
【0057】
把持本体部7における駆動部は、圧縮エア以外の水や油等の流体により爪部を移動するものでもよく、また、ソレノイドやモータにより爪部を移動するものでもよい。
【0058】
把持検出部は、例えば、特許第3992636号公報(上記特許文献1)のチャック装置のように、電極部材と電極との接触または離間によりON信号の出力を開始または停止するものであってもよい。すなわち、爪部が待機位置から把持位置の直前までの位置に配置される時にON信号を出力せず、把持位置に配置される時にON信号を出力し、把持位置を超えた位置に配置される時にON信号を出力しない3ポジション型のセンサである把持検出部は、様々な態様にて実現されてよい。ただし、上記チャック装置は、有接点型であり、接触不良が生じる可能性があるため、把持検出部の信頼性を向上するには、爪部の把持位置への到達を非接触にて検出するものが好ましい。非接触式の把持検出部として、上記の把持検出部51,51aのような光学式センサ以外に、磁気式センサ等が利用可能であるが、光学式の把持検出部51,51aは、磁気を嫌う組立体の製造等、磁気的なセンサを用いることができない場合にも用いることができる。
【0059】
また、把持検出部は、爪部62が把持位置以外の位置に配置される際にOFF信号を出力し、爪部62が把持位置に配置される時にのみOFF信号の出力を停止するものであってもよい。このような把持検出部も、爪部62が把持位置に位置する時にのみON信号を出力する上記把持検出部51,51aと等価であるといえる。
【0060】
上記第1および第2の実施の形態では、判定回路52,52aが把持本体部7に配置されるが、チャック装置の設計によっては、判定回路は把持本体部以外に設けられてもよい。例えば、図9および図10のベースブロック500や、図1のハンド先端部4に判定回路が設けられてもよく、組立対象の製品の変更等に伴ってチャック装置を含む構成が交換される際に、交換作業を容易に行うという観点では、判定回路は、組立ロボット1において着脱自在とされる構成(すなわち、交換単位となる構成)に設けられることが好ましい。この場合、判定回路が設けられる部分もチャック装置の一部であると捉えられる。
【0061】
上記実施の形態および各変形例における構成は、相互に矛盾しない限り適宜組み合わせられてよい。
【符号の説明】
【0062】
5,5a,5b チャック装置
7 把持本体部
8 ガイド部
12 制御部
50,50a 把持部
51,51a 把持検出部
52,52a 判定回路
62 爪部
70 ピストンユニット
91 ワーク
512 出射部
513 受光部
514 遮蔽部
524,524a 表示部
【技術分野】
【0001】
本発明は、ワークを把持するチャック装置に関する。
【背景技術】
【0002】
従来より、自動組立ライン等において組立ロボットが用いられており、組立ロボットでは、ワークを把持するロボットハンドがロボットアームに接続されることにより、ロボットハンドが3次元的に移動可能とされる。ロボットハンドでは、圧縮エアを用いたチャック装置の駆動により、ワークの把持および解放が行われる。
【0003】
また、特許文献1では、チャック装置において、ワークが適切に把持されているか否かを検出する手法が開示されている。具体的には、一方のフィンガに第1の電極部材および連結電極が取り付けられ、他方のフィンガに第2の電極部材および当接部材が取り付けられる。両フィンガがワークを挟持する位置にある時には、連結電極が第2の電極部材に当接し、第1の電極部材が連結電極を介して第2の電極部材と導通する。また、フィンガが全開位置にある時には連結電極が第2の電極部材と離間し、閉位置にある時には当接部材により第1の電極部材が連結電極と離間する。これにより、ワークが適切に把持されたか否かが正確かつ容易に検出される。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特許第3992636号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、特許文献1のチャック装置のように、爪部が全開位置からワークを把持する把持位置に到達した時にON信号が出力され、爪部が把持位置を超えた際にON信号の出力が停止される場合、仮に爪部がワークを把持し損ねても、把持位置を通過する時にON信号が一瞬出力されるため、ON信号が入力される外部の制御部において、ワークの把持が誤って認識される虞がある。
【0006】
本発明は上記課題に鑑みなされたものであり、ワークが把持されていないにもかかわらず、制御部においてワークの把持が誤って認識されることを簡単な構成にて防止することを目的としている。
【課題を解決するための手段】
【0007】
請求項1に記載の発明は、ワークを把持するチャック装置であって、ワークの把持に使用される爪部を有し、前記爪部を、待機位置から把持位置へと向かう方向へ連続的に移動することによりワークを把持する把持部と、前記爪部が前記待機位置から前記把持位置に到達した時にON信号を出力する把持検出部と、前記把持検出部からのON信号が入力される判定回路とを備え、前記爪部の前記待機位置から前記把持位置へと向かう移動において、前記爪部が前記把持位置を超えた場合に前記把持検出部がON信号の出力を停止し、前記判定回路が、ON信号の入力が所定時間継続した場合に、ワークの把持を示す把持信号を、外部の制御部に向けて出力する。
【0008】
請求項2に記載の発明は、請求項1に記載のチャック装置であって、前記把持部と同様の構成である他の把持部と、前記把持検出部と同様の構成であり、前記他の把持部に関するON信号を出力する他の把持検出部とをさらに備え、前記判定回路に前記他の把持検出部からのON信号が入力され、前記判定回路が、前記把持検出部および前記他の把持検出部の双方から前記所定時間継続するON信号が入力された場合に、前記把持信号を出力する。
【0009】
請求項3に記載の発明は、請求項2に記載のチャック装置であって、前記判定回路が、前記把持検出部および前記他の把持検出部のそれぞれからのON信号の入力を示す表示部を備える。
【0010】
請求項4に記載の発明は、請求項1ないし3のいずれかに記載のチャック装置であって、前記把持部が、前記爪部の移動をガイドするガイド部と、前記ガイド部が固定され、前記爪部を移動させる駆動部を有する把持本体部とを備え、前記判定回路が、前記把持本体部に配置される。
【0011】
請求項5に記載の発明は、請求項1ないし4のいずれかに記載のチャック装置であって、前記把持部が、ワークを把持する際に待機位置から把持位置へと向かう方向へ連続的に移動する他の爪部を有し、ワークを把持する際の前記他の爪部の移動方向と前記爪部の移動方向とが逆向きであり、前記把持検出部が、検出光を出射する出射部と、前記検出光を受光する受光部と、前記爪部に固定された遮蔽部と、前記他の爪部に固定された他の遮蔽部とを備え、前記爪部が前記待機位置から前記把持位置に到達するまで、前記遮蔽部により、前記検出光の前記受光部への入射が遮蔽され、前記爪部が前記把持位置に位置する間、前記検出光が前記受光部に入射し、前記爪部が前記把持位置を超えた場合に、前記他の遮蔽部により、前記検出光の前記受光部への入射が遮蔽される。
【発明の効果】
【0012】
本発明によれば、ワークが把持されていないにもかかわらず、制御部においてワークの把持が誤って認識されることを簡単な構成にて防止することができる。
【図面の簡単な説明】
【0013】
【図1】第1の実施の形態に係る組立ロボット1の側面図である。
【図2】チャック装置を示す図である。
【図3】チャック装置を示す図である。
【図4】爪部の動作を説明するための図である。
【図5】爪部の動作を説明するための図である。
【図6】把持検出部における動作を説明するための図である。
【図7】把持検出部における動作を説明するための図である。
【図8】把持検出部における動作を説明するための図である。
【図9】第2の実施の形態に係るチャック装置を示す図である。
【図10】チャック装置の他の例を示す図である。
【発明を実施するための形態】
【0014】
図1は、本発明の第1の実施の形態に係る組立ロボット1の側面図である。組立ロボット1は、多数の部品から構成される組立体を自動的に組み立てる自動組立ライン等において用いられる産業用ロボットである。図1の組立ロボット1は、多自由度(例えば、6自由度)のロボットアーム11、ロボットアーム11の先端に着脱可能に取り付けられるロボットハンド2、および、組立ロボット1の全体制御を担う制御部12を備え、ロボットアーム11によりロボットハンド2が自在に移動可能である。ロボットハンド2は、ロボットアーム11に取り付けられるハンド本体部3、および、ハンド本体部3に着脱自在に装着されるハンド先端部4を備える。組立ロボット1では、ハンド先端部4が所定の中心軸J1を中心としてハンド本体部3の一部と共に回転可能である。ハンド先端部4において図1中の下側(重力方向の下側であるとは限らない。以下同様。)の部位には、ワークを把持する複数のチャック装置5が中心軸J1を中心とする周方向に等角度間隔にて取り付けられる。
【0015】
図2および図3はハンド先端部4から取り外した状態におけるチャック装置5の外観を示す図である。図2は正面から見たチャック装置5を示し、図3は側方から見たチャック装置5を示す。図2および図3では後述の爪部62を上側に配置してチャック装置5を図示している。
【0016】
図3に示すチャック装置5は、複数の(本実施の形態では、2つの)爪部62にてワークを把持する把持部50を備える。把持部50は、2つの爪部62にそれぞれ接続される2つの板カム部61(後述の図4および図5参照)、爪部62を駆動させる把持本体部7、並びに、把持本体部7に固定されるとともに爪部62の移動をガイドするガイド部8を有する。把持本体部7は、外形が直方体である本体700を有し、本体700には有底の穴部701が形成される。穴部701の側面は所定の中心軸J2を中心とする円筒面であり、穴部701内にはピストンユニット70が挿入される。ピストンユニット70は、中心軸J2を中心とする円板状のピストン部71を有し、ピストン部71の爪部62側(図3中の上側)の主面上には中心軸J2を中心とする円柱状の軸部73が設けられる。
【0017】
ピストンユニット70は、中心軸J2を中心とする円環状の環状部材72をさらに有し、軸部73が環状部材72に挿入される。環状部材72は穴部701の開口縁近傍に固定され、穴部701の開口が閉塞される。また、環状部材72の内周面にはパッキンが設けられ、軸部73を中心軸J2に沿って移動可能としつつ、環状部材72の内周面と軸部73との間が密閉される。また、環状部材72の外周面にもパッキンが設けられ、環状部材72の外周面と穴部701の側面との間が密閉される。
【0018】
本体700において、穴部701の底面には内部流路の内部開口が形成され、当該内部流路は電磁弁(ここでは、5ポート2ポジションのシングルソレノイド)に接続される。また、穴部701の側面上においてピストン部71と環状部材72との間の位置(軸部73に対向する位置)にも他の内部流路の内部開口が形成され、当該内部流路は同じ電磁弁に接続される。チャック装置5では、電磁弁のON/OFFを切り替えることにより一方の内部開口から穴部701内に圧縮エアが供給され、他方の内部開口近傍が大気圧に開放される。したがって、電磁弁のON/OFFを制御することにより、ピストン部71が軸部73と共に中心軸J2に沿って進退する。
【0019】
軸部73の爪部62側の端部731(後述するように板カム部61と係合するため、以下、「係合端部731」という。)は薄い板状である。また、係合端部731には貫通孔が形成されており、ピン732が当該貫通孔内に挿入される。ピン732の両端は係合端部731の両主面から突出する。
【0020】
図3に示すように、ガイド部8は、中間部83および蓋部材84を有する。中間部83は、ピストンユニット70の環状部材72上に設けられる板状部材831を有し、板状部材831の中央には軸部73との干渉を避ける貫通孔832が形成される。また、板状部材831の爪部62側の主面上には、薄板状の2つのスペーサ板833(図3では、1つのスペーサ板833のみを示している。)が直立した状態で貫通孔832の周囲に配置される。チャック装置5では、係合端部731が2つのスペーサ板833の間に配置され、板状の係合端部731および2つのスペーサ板833は中心軸J2を含む同一平面(図3の紙面に垂直な平面)上に位置する。
【0021】
2つの板カム部61は、係合端部731および2つのスペーサ板833を間に介在させて向かい合うように、直立した状態で板状部材831上に配置される。また、各板カム部61にはカム孔611(後述の図4および図5参照)が形成されており、2つの板カム部61のカム孔611に係合端部731のピン732の両端が挿入される。
【0022】
蓋部材84は、ブロック状の部材において2つの板カム部61が配置される部位をくり貫いた形状であり、板カム部61に垂直かつ中心軸J2を含む断面が2つの板カム部61を跨ぐような形状である。図3に示す蓋部材84において、板カム部61に垂直な2つの側面843のそれぞれには、板カム部61との干渉を避ける開口844が形成される。また、蓋部材84における図3中の上側の面841には、爪部62との干渉を避ける開口842が形成される。
【0023】
後述するように、図3のチャック装置5では、ピストンユニット70の軸部73の中心軸J2に沿う移動により、ピン732が係合されたカム孔611に従って各板カム部61が爪部62と共に、図2中の横方向(図3では、紙面に垂直な方向であり、以下、「爪移動方向」という。)に移動する。このとき、板カム部61および板カム部61に接続された爪部62の爪移動方向への移動は、図3に示す中間部83の2つのスペーサ板833および板状部材831、並びに、蓋部材84の内面(すなわち、板カム部61に対向する面)および開口844の縁によりガイドされる。以上のように、図3のピストンユニット70は爪部62を爪移動方向に移動させる駆動部であり、ガイド部8の中間部83および蓋部材84が、板カム部61および爪部62の爪移動方向への移動をガイドする。
【0024】
図2および図3に示すように、チャック装置5は、爪部62が爪移動方向の所定位置(後述の把持位置)へと到達した際にON信号を出力する把持検出部51、および、把持検出部51からのON信号が入力される判定回路52をさらに備える。把持検出部51は、把持部50に固定された支持部511、支持部511上に設けられる出射部512および受光部513(本実施の形態では、1つのフォトカプラに含まれる出射部および受光部)、並びに、2つの爪部62にそれぞれ固定される2つの遮蔽部514を有する。
【0025】
2つの遮蔽部514は爪移動方向の幅が同じ、かつ、互いに平行な板状であり、主面の法線方向(図3中の横方向であり、出射部512と受光部513との間の後述の光軸に平行な方向である。)に僅かにずれて配置される。各遮蔽部514は支持板515および固定部516を介して爪部62に固定されており、爪部62と共に爪移動方向に移動する。出射部512は受光部513に向けて検出光を出射し、後述するように、出射部512と受光部513との間の光軸上にいずれの遮蔽部514も位置しない時に、受光部513にて検出光が受光され、ON信号が出力される。
【0026】
把持本体部7に固定される回路基板上に形成される判定回路52は、図2に示すように、把持検出部51に接続される接続部521、制御部12に接続される通信部522、把持検出部51からのON信号に対して所定の処理を施す処理部523、および、把持検出部51からのON信号の入力を示す表示部524を有する。表示部524には、発光素子(例えば、LED(発光ダイオード))が設けられる。
【0027】
次に、チャック装置5における爪部62の動作について説明する。図4および図5は爪部62の動作を説明するための図であり、図4および図5では説明の便宜上、係合端部731、板カム部61および爪部62のみを図示している。
【0028】
図3に示すピストン部71および軸部73が爪部62側に向かって中心軸J2に沿って連続的に移動すると、図4に示す係合端部731が図4中の上側に移動し、ピン732が係合するカム孔611に従って、2つの爪部62が近づくように板カム部61および爪部62が爪移動方向(図4中の横方向)に連続的に移動する。これにより、図5に示すように2つの爪部62がほぼ接触する(近接を含む。)。また、ピストン部71および軸部73が穴部701の底面側に向かって中心軸J2に沿って移動すると、2つの爪部62が互いに離間するように板カム部61および爪部62が爪移動方向に連続的に移動し、図4に示す状態に戻される。平行チャックである把持部50では、一方の爪部62の移動方向と他方の爪部62の移動方向とが逆向きとなる。
【0029】
実際には、2つの爪部62が最も離れた図4に示す全開位置から、最も接近した図5に示す閉位置へと移動する途中に、2つの爪部62の間にワークが挟まれるため、正常にワークが把持される際には、2つの爪部62は図5に示す閉位置まで移動しない。また、ワークを把持した状態にて、係合端部731を爪部62から離れるように中心軸J2に沿って移動する(すなわち、ピストン部71を穴部701の底面側に向かって移動する)ことにより、各爪部62が図4に示す全開位置へと移動し、ワークが解放される。図4に示す全開位置は、ワークの把持前の待機時における各爪部62の位置であるため、以下、「待機位置」という。また、ワークが正常に把持される際の各爪部62の位置を、以下、「把持位置」という。
【0030】
次に、把持検出部51および判定回路52における動作について説明する。図6ないし図8は、把持検出部51における動作を説明するための図である。図6ないし図8では、爪部62側からチャック装置5を見た場合における爪部62、遮蔽部514、出射部512および受光部513を実線にて示し、固定部516および支持板515を二点鎖線にて示し、他の構成要素の図示を省略している。
【0031】
図6に示すように、2つの爪部62が爪移動方向(図6中の横方向)に最も離れた待機位置では、出射部512と受光部513との間の光軸P1上に一方の遮蔽部514が位置するため、受光部513では検出光が受光されず、ON信号は出力されない。続いて、各爪部62が待機位置から把持位置へと向かう方向へ連続的に移動すると、図7中にて二点鎖線にて示すワーク91が2つの爪部62により把持(狭持)される。2つの爪部62は、互いに接触する閉位置までは移動せず、図7に示す位置(すなわち、把持位置)にて停止する。なお、各爪部62において他方の爪部62に対向する面には溝部621が形成され、ワーク91は2つの溝部621間にてしっかりと保持される。
【0032】
このとき、2つの遮蔽部514が光軸P1から爪移動方向にずれた位置にて全体的に重なり、いずれの遮蔽部514も光軸P1上に位置しない。これにより、受光部513にて検出光が受光され、ON信号が判定回路52に出力される。受光部513では、検出光が受光される間中、ON信号が継続して出力される。図2の処理部523では、把持検出部51からのON信号の入力が所定時間継続したことが確認されると、ワーク91の把持を示す把持信号が生成されて、通信部522から外部の制御部12に向けて出力される。把持信号の出力は、把持検出部51からのON信号の入力が途絶えるまで継続される。また、ON信号の入力が継続する間、表示部524の発光素子が点灯し、作業者においてON信号の発生が確認可能である。制御部12は、把持信号を確認してワーク91の把持が正常に行われたと認識した後(または、認識動作と並行して)、図1のロボットアーム11によりロボットハンド2を組立体(組立途上の組立体)の近傍に配置する。
【0033】
把持部50にてワーク91を解放する際には、2つの爪部62が把持位置から待機位置へと向かう方向へ連続的に移動し、図6に示すように2つの爪部62が互いに離れる。このとき、爪部62が把持位置から離れた直後に、光軸P1上に遮蔽部514が位置するため、検出光が遮蔽されてON信号の出力が停止される。判定回路52では、ON信号の入力が途絶えることより把持信号の出力が停止される。これにより、制御部12においてワーク91の解放が認識される。
【0034】
一方、把持部50によりワークを把持し損ねた場合、2つの爪部62は図6に示す待機位置から図7に示す把持位置を通過して図8に示す閉位置へと移動する。2つの爪部62の間の爪移動方向の距離がワーク91(図7参照)の爪移動方向の幅よりも小さい状態では、光軸P1上に1つの遮蔽部514(正確には、図6において光軸P1上に位置するものとは異なる遮蔽部514)が位置するため、受光部513では検出光が受光されず、ON信号は出力されない。
【0035】
このとき、爪部62が図7に示す把持位置を通過する極短い時間において、受光部513にて検出光が受光されてON信号が図2の判定回路52に出力されるが、爪部62は連続的に移動し、ON信号の入力が所定時間継続しないため、処理部523では把持信号は生成されない。処理部523における処理は、把持検出部51からのON信号に対して継続時間が短いものを除外するフィルタ処理であると捉えることができる。制御部12では、判定回路52から把持信号が入力されないことにより、ワーク91の把持が正常に行われなかったと認識され、ワーク91の把持動作の再実行等、所定の動作が行われる。
【0036】
以上に説明したように、チャック装置5の把持検出部51では、爪部62の待機位置から把持位置へと向かう移動において、爪部62が把持位置に到達した時にON信号が出力され、万一、爪部62が把持位置を超えた場合にON信号の出力が停止される。また、判定回路52が、爪部62を移動する把持本体部7に設けられ、判定回路52では、把持検出部51からのON信号の入力が所定時間継続した場合にのみ、ワーク91の把持を示す把持信号が外部の制御部12に向けて出力される。これにより、ワーク91が把持されていないにもかかわらず、爪部62が把持位置を通過する際に発生する短時間のON信号に起因して、制御部12においてワーク91の把持が誤って認識されることを、簡単な構成にて防止することができる。
【0037】
また、組立対象の製品の変更に合わせてチャック装置5を他のチャック装置に交換する場合であっても、これらのチャック装置では、判定回路が把持部の把持本体部に配置され、把持検出部も把持部に接続されることにより、チャック装置を交換する際に、把持部と一体的に判定回路および把持検出部が取り外され、他の把持部と一体的に他の判定回路および把持検出部が取り付けられる。これにより、把持部の構造に合った判定回路および把持検出部に速やかに交換することができる。
【0038】
さらに、チャック装置5では、爪部62が待機位置から把持位置に到達するまで、一方の遮蔽部514により、検出光の受光部513への入射が遮蔽され、爪部62が把持位置に位置する間、検出光が受光部513に入射し、爪部62が把持位置を超えた場合に、他方の遮蔽部514により、検出光の受光部513への入射が遮蔽される。これにより、把持検出部51にてON信号の出力が開始される際の爪部62の位置と、爪部62が把持位置を超えてON信号の出力が停止される際の爪部62の位置とを独立して決定することができる。
【0039】
実際には、各遮蔽部514が接続された支持板515は、図2および図3に示すボルト517により固定部516に固定されており、ボルト517を緩めて、各爪部62に対する遮蔽部514の爪移動方向の相対位置を微調整することが可能となっている。また、判定回路52には、把持検出部51からのON信号の入力を示す表示部524が設けられる。よって、チャック装置5では、表示部524の状態を参照しつつ遮蔽部514の爪部62に対する相対位置を個別に微調整して、把持検出部51においてON信号が出力される位置(すなわち、把持位置)の範囲を容易に、かつ、高精度に設定することが可能となる。
【0040】
図9は、本発明の第2の実施の形態に係るチャック装置5aを示す図であり、図2と同様に、ハンド先端部4(図1参照)から取り外した状態におけるチャック装置5aの外観を示す。図9のチャック装置5aは、ハンド先端部4に接続されるベースブロック500を有し、同様の構成である2つの把持部50,50aがベースブロック500に固定される。実際のロボットハンド2では、ハンド先端部4における図1中の下側の部位に、複数のチャック装置5aのベースブロック500が中心軸J1を中心とする周方向に等角度間隔にて取り付けられ、爪部62は下側に配置される。
【0041】
一方の把持部50には、図2の把持部50と同様に把持検出部51および判定回路52aが取り付けられ、他方の把持部50aには、把持検出部51と同様の構成である把持検出部51aのみが取り付けられる。把持部50の判定回路52aでは、2つの接続部521,521aが、2つの把持部50,50aの把持検出部51,51aにそれぞれ接続される。
【0042】
図9のチャック装置5aでは、2つの把持部50,50aがベースブロック500内の流路(図示省略)を介して同じ電磁弁に接続されており、2つの把持部50,50aにて爪部62が同時に移動する。したがって、ワークを把持する際には、2つの把持部50,50aにおいて同時に爪部62が待機位置から把持位置へと向かい、2つのワークがそれぞれ把持される。このとき、一方の把持検出部51では、出射部512からの検出光が受光部513(図3参照)にて受光されることによりON信号が判定回路52aに出力され、他方の把持検出部51aでも、出射部512からの検出光が受光部にて受光されることによりON信号が判定回路52aに出力される。
【0043】
判定回路52aの処理部523aでは、双方の把持検出部51,51aからのON信号の入力が所定時間継続したことが確認されると、ワークの把持を示す把持信号が生成されて、通信部522から外部の制御部12に向けて出力される。判定回路52aには、2つの発光素子525,525aを有する表示部524aが設けられており、2つの発光素子525,525aは2つの接続部521,521aにそれぞれ対応する。各把持検出部51,51aからのON信号の入力が継続する間、対応する発光素子525,525aが点灯し、作業者においてON信号の発生が容易に確認可能となる。
【0044】
一方、いずれか1つの把持部50,50a(または、双方の把持部50,50a)にてワークを適切に把持し損ねた場合、図6ないし図8を参照して説明したように、当該把持部の2つの爪部62が把持位置を通過する極短い時間において、当該把持部に接続された把持検出部からON信号が判定回路52aに出力されるが、爪部62は連続的に移動し、ON信号の出力は所定時間継続しないため、判定回路52aの処理部523aでは把持信号は生成されない。これにより、制御部12では、ワークの把持が正常に行われなかったと認識される。なお、ワークを把持し損ねた把持部50,50aに対応する発光素子525,525aは消灯した状態となる。組立ロボット1では、必要に応じてワークの把持動作の再実行等、所定の動作が行われる。
【0045】
以上に説明したように、図9のチャック装置5aでは、2つの把持部50,50aに関するON信号をそれぞれ出力する2つの把持検出部51,51aが設けられ、2つの把持検出部51,51aからのON信号が1つの判定回路52aに入力される。そして、2つの把持検出部51,51aの双方から所定時間継続するON信号が入力された場合に、把持信号が制御部12に出力される。これにより、把持部50,50aの一方または双方にてワークが把持されていないにもかかわらず、爪部62が把持位置を通過する際に発生するON信号に起因して、制御部12においてワークの把持が誤って認識されることを、簡単な構成にて防止することができる。
【0046】
また、複数の把持部50,50aが設けられるチャック装置5aでは、判定回路52aが、一方の把持部50の把持本体部7に配置されることにより、判定回路52aが把持部50,50aから離れた位置に配置される場合に比べて、把持検出部51,51aと判定回路52aとの間の配線を簡素化することができる。
【0047】
ここで、判定回路52aが設けられず、2つの把持検出部51,51aが制御部12に直接接続され、制御部12において2つの把持部50,50aにおけるワークの把持状態を判定する比較例の装置を想定する。比較例の装置では、把持部50,50aの調整(例えば、爪部62に対する遮蔽部514の相対位置の微調整)の際に、対応する把持検出部51,51aがON信号を出力しているか否かを確認することが容易ではなく、把持検出部51,51aにおけるON信号の出力の有無を、制御部12のモニタに表示するプログラム等を準備する必要がある。
【0048】
これに対し、図9のチャック装置5aでは、把持検出部51,51aのそれぞれからのON信号の入力を示す表示部524aが判定回路52aに設けられる。これにより、各把持検出部51,51aにおけるON信号の出力の有無を容易に確認することができ、把持部50,50aの調整を効率よく行うことが可能となる。
【0049】
次に、ロボットハンド2において、組立対象の製品の変更に応じて図2のチャック装置5と図9のチャック装置5aとが交換可能である(または、チャック装置を有するハンド先端部ごと交換される)場合について述べる。
【0050】
この場合において、チャック装置5,5aにて判定回路52,52aが設けられず、各把持検出部が制御部12に直接接続される比較例を想定すると、図2のチャック装置5を用いるときには、制御部12では、当該チャック装置5からの1つのON信号の入力が一定時間継続したことを確認して、ワークが把持されたと認識される。また、図9のチャック装置5aを用いるときには、当該チャック装置5aからの2つのON信号のそれぞれの入力が一定時間継続したことを確認して、ワークが把持されたと認識される。したがって、比較例の場合、チャック装置5,5aを交換する際に、制御部12における回路やプログラムの変更等の煩雑な作業が必要となる。なお、2つの把持部を有するチャック装置において、2つの把持検出部を直列に接続し、さらに、後段の把持検出部を制御部12に接続して、2つの把持検出部の双方にてON信号が発生する場合に1つの信号のみが制御部12に入力されるような設計を採用することも考えられる。しかしながら、この場合、上述した把持部の調整の際に、ON信号の出力の有無を、2つの把持検出部にて個別に確認することができなくなる。
【0051】
これに対し、判定回路52,52aが設けられる上記チャック装置5,5aでは、図2のチャック装置5を用いる場合、および、図9のチャック装置5aを用いる場合の双方において、1つの把持信号が制御部12に出力される。したがって、上記チャック装置5,5aを交換可能に用いる組立ロボット1では、制御部12における回路やプログラムの変更等の煩雑な作業を行うことなく、組立対象の製品の変更に容易に対応することが可能となる。
【0052】
以上、本発明の実施の形態について説明してきたが、本発明は上記実施の形態に限定されるものではなく、様々な変形が可能である。
【0053】
チャック装置において2つの把持部が設けられる場合に、図10に示すように、各把持部50に対して判定回路52が設けられてもよい。図10のチャック装置5bでは、2つの把持部50においてワークの把持状態を個別に、かつ、確実に判定することが可能となる。また、チャック装置の設計によっては、図10のチャック装置5bにおいて、一方の把持部50の把持検出部51を他方の把持部50の判定回路52に接続することにより、図9のチャック装置5aと同じ機能が実現可能とされてもよい。この場合、当該一方の把持部50の判定回路52は利用されない。
【0054】
図9および図10のチャック装置5a,5bでは、3以上の把持部が設けられてもよい。また、把持部において3以上の爪部が設けられてもよい。さらに、複数の爪部を有する把持部において、1つの爪部のみが移動可能とされ、他の爪部は把持本体部に固定されてもよい。すなわち、チャック装置では、ワークの把持に使用される少なくとも1つの爪部が待機位置から把持位置へと向かう方向へ連続的に移動することによりワークが把持される。
【0055】
チャック装置5,5a,5bでは、複数の爪部62が互いに最も離間した待機位置から把持位置へと移動することにより、いわゆる外掴みにてワークが把持されるが、例えば、環状の部材を把持する際に、複数の爪部が互いに最も近接した待機位置から、互いに離れるように移動して、ワークが把持されてもよい。
【0056】
上記第1および第2の実施の形態では、把持部50,50aが板カム部を有することにより、把持部50,50aの構成を簡素化することができるが、チャック装置の設計によっては、他の機構(例えば、リンク機構)により、軸部の中心軸J2方向への移動による爪部の移動が実現されてもよい。
【0057】
把持本体部7における駆動部は、圧縮エア以外の水や油等の流体により爪部を移動するものでもよく、また、ソレノイドやモータにより爪部を移動するものでもよい。
【0058】
把持検出部は、例えば、特許第3992636号公報(上記特許文献1)のチャック装置のように、電極部材と電極との接触または離間によりON信号の出力を開始または停止するものであってもよい。すなわち、爪部が待機位置から把持位置の直前までの位置に配置される時にON信号を出力せず、把持位置に配置される時にON信号を出力し、把持位置を超えた位置に配置される時にON信号を出力しない3ポジション型のセンサである把持検出部は、様々な態様にて実現されてよい。ただし、上記チャック装置は、有接点型であり、接触不良が生じる可能性があるため、把持検出部の信頼性を向上するには、爪部の把持位置への到達を非接触にて検出するものが好ましい。非接触式の把持検出部として、上記の把持検出部51,51aのような光学式センサ以外に、磁気式センサ等が利用可能であるが、光学式の把持検出部51,51aは、磁気を嫌う組立体の製造等、磁気的なセンサを用いることができない場合にも用いることができる。
【0059】
また、把持検出部は、爪部62が把持位置以外の位置に配置される際にOFF信号を出力し、爪部62が把持位置に配置される時にのみOFF信号の出力を停止するものであってもよい。このような把持検出部も、爪部62が把持位置に位置する時にのみON信号を出力する上記把持検出部51,51aと等価であるといえる。
【0060】
上記第1および第2の実施の形態では、判定回路52,52aが把持本体部7に配置されるが、チャック装置の設計によっては、判定回路は把持本体部以外に設けられてもよい。例えば、図9および図10のベースブロック500や、図1のハンド先端部4に判定回路が設けられてもよく、組立対象の製品の変更等に伴ってチャック装置を含む構成が交換される際に、交換作業を容易に行うという観点では、判定回路は、組立ロボット1において着脱自在とされる構成(すなわち、交換単位となる構成)に設けられることが好ましい。この場合、判定回路が設けられる部分もチャック装置の一部であると捉えられる。
【0061】
上記実施の形態および各変形例における構成は、相互に矛盾しない限り適宜組み合わせられてよい。
【符号の説明】
【0062】
5,5a,5b チャック装置
7 把持本体部
8 ガイド部
12 制御部
50,50a 把持部
51,51a 把持検出部
52,52a 判定回路
62 爪部
70 ピストンユニット
91 ワーク
512 出射部
513 受光部
514 遮蔽部
524,524a 表示部
【特許請求の範囲】
【請求項1】
ワークを把持するチャック装置であって、
ワークの把持に使用される爪部を有し、前記爪部を、待機位置から把持位置へと向かう方向へ連続的に移動することによりワークを把持する把持部と、
前記爪部が前記待機位置から前記把持位置に到達した時にON信号を出力する把持検出部と、
前記把持検出部からのON信号が入力される判定回路と、
を備え、
前記爪部の前記待機位置から前記把持位置へと向かう移動において、前記爪部が前記把持位置を超えた場合に前記把持検出部がON信号の出力を停止し、
前記判定回路が、ON信号の入力が所定時間継続した場合に、ワークの把持を示す把持信号を、外部の制御部に向けて出力することを特徴とするチャック装置。
【請求項2】
請求項1に記載のチャック装置であって、
前記把持部と同様の構成である他の把持部と、
前記把持検出部と同様の構成であり、前記他の把持部に関するON信号を出力する他の把持検出部と、
をさらに備え、
前記判定回路に前記他の把持検出部からのON信号が入力され、
前記判定回路が、前記把持検出部および前記他の把持検出部の双方から前記所定時間継続するON信号が入力された場合に、前記把持信号を出力することを特徴とするチャック装置。
【請求項3】
請求項2に記載のチャック装置であって、
前記判定回路が、前記把持検出部および前記他の把持検出部のそれぞれからのON信号の入力を示す表示部を備えることを特徴とするチャック装置。
【請求項4】
請求項1ないし3のいずれかに記載のチャック装置であって、
前記把持部が、
前記爪部の移動をガイドするガイド部と、
前記ガイド部が固定され、前記爪部を移動させる駆動部を有する把持本体部と、
を備え、
前記判定回路が、前記把持本体部に配置されることを特徴とするチャック装置。
【請求項5】
請求項1ないし4のいずれかに記載のチャック装置であって、
前記把持部が、ワークを把持する際に待機位置から把持位置へと向かう方向へ連続的に移動する他の爪部を有し、
ワークを把持する際の前記他の爪部の移動方向と前記爪部の移動方向とが逆向きであり、
前記把持検出部が、
検出光を出射する出射部と、
前記検出光を受光する受光部と、
前記爪部に固定された遮蔽部と、
前記他の爪部に固定された他の遮蔽部と、
を備え、
前記爪部が前記待機位置から前記把持位置に到達するまで、前記遮蔽部により、前記検出光の前記受光部への入射が遮蔽され、前記爪部が前記把持位置に位置する間、前記検出光が前記受光部に入射し、前記爪部が前記把持位置を超えた場合に、前記他の遮蔽部により、前記検出光の前記受光部への入射が遮蔽されることを特徴とするチャック装置。
【請求項1】
ワークを把持するチャック装置であって、
ワークの把持に使用される爪部を有し、前記爪部を、待機位置から把持位置へと向かう方向へ連続的に移動することによりワークを把持する把持部と、
前記爪部が前記待機位置から前記把持位置に到達した時にON信号を出力する把持検出部と、
前記把持検出部からのON信号が入力される判定回路と、
を備え、
前記爪部の前記待機位置から前記把持位置へと向かう移動において、前記爪部が前記把持位置を超えた場合に前記把持検出部がON信号の出力を停止し、
前記判定回路が、ON信号の入力が所定時間継続した場合に、ワークの把持を示す把持信号を、外部の制御部に向けて出力することを特徴とするチャック装置。
【請求項2】
請求項1に記載のチャック装置であって、
前記把持部と同様の構成である他の把持部と、
前記把持検出部と同様の構成であり、前記他の把持部に関するON信号を出力する他の把持検出部と、
をさらに備え、
前記判定回路に前記他の把持検出部からのON信号が入力され、
前記判定回路が、前記把持検出部および前記他の把持検出部の双方から前記所定時間継続するON信号が入力された場合に、前記把持信号を出力することを特徴とするチャック装置。
【請求項3】
請求項2に記載のチャック装置であって、
前記判定回路が、前記把持検出部および前記他の把持検出部のそれぞれからのON信号の入力を示す表示部を備えることを特徴とするチャック装置。
【請求項4】
請求項1ないし3のいずれかに記載のチャック装置であって、
前記把持部が、
前記爪部の移動をガイドするガイド部と、
前記ガイド部が固定され、前記爪部を移動させる駆動部を有する把持本体部と、
を備え、
前記判定回路が、前記把持本体部に配置されることを特徴とするチャック装置。
【請求項5】
請求項1ないし4のいずれかに記載のチャック装置であって、
前記把持部が、ワークを把持する際に待機位置から把持位置へと向かう方向へ連続的に移動する他の爪部を有し、
ワークを把持する際の前記他の爪部の移動方向と前記爪部の移動方向とが逆向きであり、
前記把持検出部が、
検出光を出射する出射部と、
前記検出光を受光する受光部と、
前記爪部に固定された遮蔽部と、
前記他の爪部に固定された他の遮蔽部と、
を備え、
前記爪部が前記待機位置から前記把持位置に到達するまで、前記遮蔽部により、前記検出光の前記受光部への入射が遮蔽され、前記爪部が前記把持位置に位置する間、前記検出光が前記受光部に入射し、前記爪部が前記把持位置を超えた場合に、前記他の遮蔽部により、前記検出光の前記受光部への入射が遮蔽されることを特徴とするチャック装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2012−71383(P2012−71383A)
【公開日】平成24年4月12日(2012.4.12)
【国際特許分類】
【出願番号】特願2010−218260(P2010−218260)
【出願日】平成22年9月29日(2010.9.29)
【出願人】(000000309)IDEC株式会社 (188)
【Fターム(参考)】
【公開日】平成24年4月12日(2012.4.12)
【国際特許分類】
【出願日】平成22年9月29日(2010.9.29)
【出願人】(000000309)IDEC株式会社 (188)
【Fターム(参考)】
[ Back to top ]