
デジタルカメラおよび処理プログラム
【課題】被写体に関する距離情報を迅速に取得できるデジタルカメラの技術を提供する。
【解決手段】夜間撮影において、同一の構図でフラッシュを発光させない非発光画像Gaと、フラッシュを発光させる発光画像Gbとをデジタルカメラで連続して取得する。そして、画像Ga、Gbで対応する各画素を除算して、演算結果を表す画像Gcを生成する。この画像Gcの各画素における演算値を距離情報とし、距離に応じて遠距離用(外光用)のWB補正値と近距離用(フラッシュ光用)のWB補正値との重み係数を決定する。この重み係数に基づき各画素ごとにWB補正値を調整し、画像Gbに対するWB補正を行う。これにより、被写体に関する距離情報を迅速に取得できるとともに、この距離情報をWB補正に利用することで迅速で適切なWBが行える。
【解決手段】夜間撮影において、同一の構図でフラッシュを発光させない非発光画像Gaと、フラッシュを発光させる発光画像Gbとをデジタルカメラで連続して取得する。そして、画像Ga、Gbで対応する各画素を除算して、演算結果を表す画像Gcを生成する。この画像Gcの各画素における演算値を距離情報とし、距離に応じて遠距離用(外光用)のWB補正値と近距離用(フラッシュ光用)のWB補正値との重み係数を決定する。この重み係数に基づき各画素ごとにWB補正値を調整し、画像Gbに対するWB補正を行う。これにより、被写体に関する距離情報を迅速に取得できるとともに、この距離情報をWB補正に利用することで迅速で適切なWBが行える。
【発明の詳細な説明】
【0001】
【発明の属する技術分野】
本発明は、被写体に係る撮影画像データを取得する撮影手段を備えるデジタルカメラの技術に関する。
【0002】
【従来の技術】
デジタルカメラにおいては、例えば特許文献1のように、撮影エリアを60×96のブロックに分割し、これらの5760個のブロックについて1ブロック毎に被写体の距離情報を求め、この距離情報に基づきブロック毎のホワイトバランス係数を求める技術が開示されている。そして、ブロック内の画素(8×8画素)について一律にホワイトバランス補正を行う。
【0003】
【特許文献1】
特開平7−301842号公報
【0004】
【発明が解決しようとする課題】
しかしながら、特許文献1の技術では、距離情報を決定するのに多数のブロックそれぞれについて測距演算を行う必要があるため、撮像素子の画素数が多くなるほど距離情報を取得するのに多大な時間が必要となる。これにより、撮影準備に多くの時間が必要となり、レリーズタイムラグを引き起こしシャッターチャンスを逃す場合がある。
【0005】
また、特許文献1では、各ブロックごとに得られた距離情報については、ホワイトバランス補正の利用に限定している。しかし、実際のデジタルカメラにおいては、被写体に応じた輝度の補正や、例えば特殊フィルタによる空間周波数情報の特異点(特異領域)の補正を行うことが必要なケースがあるが、これらに対する適用は考慮されていない。
【0006】
本発明は、上記課題に鑑みてなされたものであり、被写体に関する距離情報を迅速に取得できるデジタルカメラの技術を提供することを目的とする。
【0007】
【課題を解決するための手段】
上記の課題を解決するため、請求項1の発明は、デジタルカメラであって、(a)被写体に係る撮影画像データを取得する撮影手段と、(b)フラッシュ発光を指示する発光指示手段と、(c)前記撮影手段によって、前記被写体に係る前記フラッシュ発光を伴った発光画像を取得する発光撮影手段と、(d)前記撮影手段によって、前記被写体に係る前記フラッシュ発光を伴わない非発光画像を取得する非発光撮影手段と、(e)前記発光画像と前記非発光画像とに基づき、前記被写体に関する距離情報を生成する生成手段と、(f)前記距離情報に応じて、前記撮影画像データに対する画像補正パラメータを決定する決定手段とを備える。
【0008】
また、請求項2の発明は、請求項1の発明に係るデジタルカメラにおいて、前記画像補正パラメータは、ホワイトバランス補正に係るパラメータである。
【0009】
また、請求項3の発明は、請求項1の発明に係るデジタルカメラにおいて、前記画像補正パラメータは、階調補正に係るパラメータである。
【0010】
また、請求項4の発明は、請求項1の発明に係るデジタルカメラにおいて、本撮影は、前記フラッシュ発光を伴った撮影である。
【0011】
また、請求項5の発明は、フラッシュ発光を伴って取得された被写体に係る発光画像と、フラッシュ発光を伴わずに取得された前記被写体に係る非発光画像とに対する処理が可能なコンピュータによって実行されることにより、前記コンピュータに、(a)前記発光画像と前記非発光画像とに基づき、前記被写体に関する距離情報を生成する生成工程と、(b)前記距離情報に応じて、前記発光画像および/または前記非発光画像に対する画像補正パラメータを決定する決定工程とを実行させる処理プログラムである。
【0012】
【発明の実施の形態】
<第1実施形態>
<デジタルカメラの要部構成>
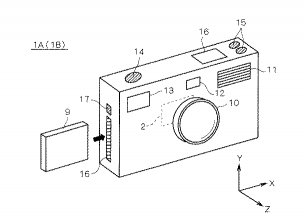
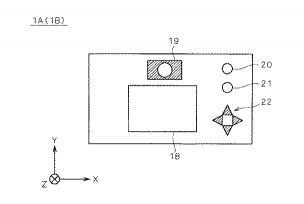
図1は、本発明の第1実施形態に係るデジタルカメラ1Aを示す斜視図である。また、図2は、デジタルカメラ1Aの背面図である。なお、図1および図2には方位関係を明確にするために互いに直交するX,Y,Zの三軸を示している。
【0013】
デジタルカメラ1Aの前面には、撮影レンズ10とフラッシュ11と測距窓12とファインダ窓13とが設けられている。撮影レンズ10の内側には撮影レンズ10を介して入射する被写体像を光電変換して画像信号を生成する撮像素子(撮像手段)であるCCD(Charge Coupled Device)2が設けられている。
【0014】
撮影レンズ10には光軸方向に沿って駆動可能なレンズ系が含まれており、当該レンズ系を光軸方向に駆動することにより、CCD2に結像される被写体像の合焦状態を実現することができるように構成されている。
【0015】
デジタルカメラ1Aの上面には、レリーズボタン14と、撮影モード設定キー15と、液晶パネル16とが配置されている。レリーズボタン14は被写体の撮影を行うときにユーザが押下操作を行ってデジタルカメラ1Aに撮影指示を与えるボタンである。
【0016】
撮影モード設定キー15では、液晶パネル16に表示される設定情報をユーザが視認しつつ、絞り優先やシャッタースピード優先という露光条件の設定や、マクロ撮影の切替え、ズーム等の設定が可能となっている。
【0017】
デジタルカメラ1Aの側面には、ユーザによるレリーズボタン14の押下操作に伴う本撮影動作で得られる画像データを記録するためのメモリカード9を着装する挿入口17が設けられている。
【0018】
デジタルカメラ1Aの背面には、本撮影前に被写体を動画的態様で表示するライブビュー表示や、撮影した画像等の表示を行うための液晶モニタ18と、ファインダ窓13に対応するファインダ19と、撮影・再生切替えキー20と、局所補正設定キー21と、カーソルキー22とが設けられている。
【0019】
撮影・再生切替えキー20は、撮影モード、再生モードのモード切替えを行うための操作部材である。具体的には、ユーザにより次の表1のように撮影状態または再生状態が選択される。
【0020】
【表1】

【0021】
局所補正設定キー21は、後述する局所補正を指示する操作部材である。具体的には、ユーザにより次の表2のように局所補正の有無が選択される。
【0022】
【表2】
【0023】
すなわち、ユーザが局所補正設定キー21をONする場合には、局所補正が撮影時に行われる。一方、ユーザが局所補正設定キー21をOFFする場合には、通常の補正つまり画像全体に対して一様な補正が撮影時に行われる。
【0024】
カーソルキー22は、撮影時のズーミングを調整したり、画像再生時のコマ送り等を行うための操作部材である。
【0025】
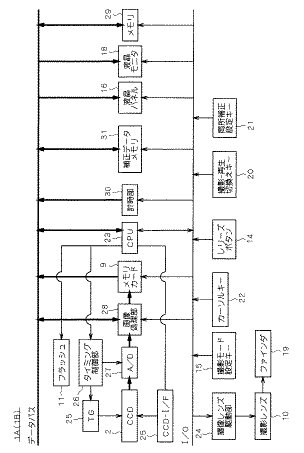
図3は、デジタルカメラ1Aの機能ブロックを示す図である。図中において、矢印付き太線は画像データの流れを示し、矢印付き細線は制御データの流れを示している。
【0026】
まず、ユーザは、撮影・再生切換えキー20と液晶モニタ18とで、表1に示す撮影状態か再生状態かを選択する。以下では、撮影状態と再生状態とに分けて説明する。
【0027】
(1)撮影状態
撮影・再生切換えキー20がOFFの場合、すなわち撮影状態が設定されている場合には、ユーザは撮影モード設定キー15と液晶パネル16とにより、絞り優先、シャッタスピード優先といった露光条件の設定や、ホワイトバランスモードの切替えなどの設定が行える。
【0028】
レリーズボタン14が押下されると、CPU23は、その時の撮影条件および画像処理モードの設定を読み取り撮影動作を行う。この場合、撮影条件の設定でフラッシュ発光を伴う撮影モードが選択されていれば、CPU23は、発光タイミングや発光時間に従ってフラッシュ11を制御する。この場合、計時部30によりフラッシュ11の発光開始や発光停止の計時が行われることとなる。
【0029】
この撮影動作では、撮影レンズ駆動部24を介して、撮影レンズ10を被写体に合焦させるように駆動する。そして、CCD2の積分動作、つまりCCDで電荷蓄積を行い、画像データが読出される。このCCD2は、CCD・I/F25を介して駆動制御が行われており、駆動タイミングパルスはTG(タイミング・ジェネレータ)25により生成される。また、タイミング制御部26は、TG25およびA/Dコンバータ27に対するクロックを生成する。
【0030】
CCD2で取得された画像データは、A/Dコンバータ27でデジタルデータに変換される。このA/Dコンバータ27は、タイミング制御部26で生成されるタイミングパルスに基づいて、CCD2から出力されるアナログ信号をデジタル信号に変換する。
【0031】
画像処理部28では、A/Dコンバータ27から伝送される画像データに対して、例えばゲイン処理やホワイトバランス補正などの画像処理を行い、処理された画像データは記録媒体として働くメモリカード9に記録される。この画像処理部28において、後述する局所WB補正が行われる場合には、補正データメモリ31から必要な補正データが読出されることとなる。
【0032】
(2)再生状態
撮影・再生切換えキー20がONの場合、すなわち再生状態に設定されている場合には、CPU23は、メモリカード9から画像データを読出し、メモリ29に一旦記憶する制御を行う。そして、CPU23は、メモリ29に記憶された画像データを画像処理部28に転送する。画像処理部28では、メモリ29から転送された画像データを液晶モニタ18で表示可能なフォーマットに変換する処理を行い、変換された画像データは液晶モニタ18に送られて、その表示が行われる。
【0033】
<局所WB補正について>
局所補正設定キー21がON(表2参照)の場合、すなわち局所補正有りが選択されている場合には、局所WB補正がデジタルカメラ1Aで行われる。
【0034】
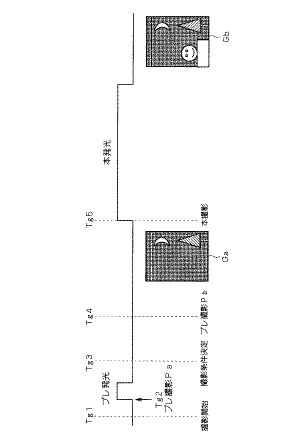
図4は、局所WB補正のための撮影手順を説明するタイミングチャートである。
【0035】
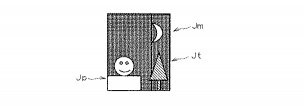
理解を容易にするため、例えば図5に示す構図で被写体を撮影する場合を考える。すなわち、夜間の撮影で主被写体(人物)Jpの背後に木Jtがあり、遠くに月Jmがある。この構図でフラッシュ撮影を行う場合には、主被写体Jpにはフラッシュ光が適切に当たり、また背後の木Jtにはフラッシュ光が僅かに届くものの、月Jmに関してはフラッシュ光の効果がない状況となる。
【0036】
このような状況において、画面全体に対し一様にフラッシュ光用のホワイトバランス(WB)補正を行うと、人物Jpは適切にWB補正が施されるが、木Jtおよび月JmはWBが崩れてしまい、全体として不自然な画像となる。
【0037】
そこで、局所補正設定キー21がONされている場合で、フラッシュ撮影時には、画面全体に一様にWB補正を施すのではなく、各部分つまり局所ごとに異なるWB補正を行うようにする。この処理の詳細を次で説明する。
【0038】
まず、ユーザがレリーズボタン14を押下する動作Tg1により、撮影が開始されると、本撮影前にフラッシュ11によるプレ発光の動作Tg2が行われプレ撮影Paが実施される。そして、このプレ発光を伴って取得された画像に基づき、本撮影における最終的な撮影条件を決定する動作Tg3が行われる。
【0039】
次に、決定した撮影条件でプレ撮影Pbの動作Tg4が行われる。このプレ撮影Pbでは、フラッシュ11を発光しない非発光状態で撮影され、CCD2では画像(発光画像)Ga(図4)が取得される。その後、フラッシュ11を本発光させる発光状態で本撮影の動作Tg5が行われ、CCD2では画像(非発光画像)Gb(図4)が取得される。
【0040】
本撮影の後には、局所WB補正が行われるが、この局所WB補正について以下で詳述する。
【0041】
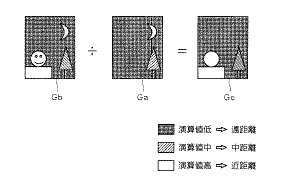
図6は、局所WB補正の方法を説明するための図である。
【0042】
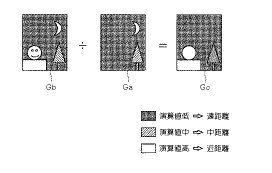
局所WB補正では、まず本撮影で取得された画像Gbに対してプレ撮影Pbにより取得された画像Gaを、対応する各画素について除算する処理が行われる。これにより、演算結果を表す画像Gcが生成される。この画像Gcでは、本撮影においてフラッシュ光が多く当たる部分、例えば人物Jpなどで演算値が高く、フラッシュ光が当たらない部分、例えば月などで演算値は低くなる。
【0043】
そして、画像Gcにおける各演算値を距離情報とし、距離に応じて外光用のWB補正値とフラッシュ光用のWB補正値との重み付け係数(以下では「重み係数」ともいう)を決定する。すなわち、演算値が1に近いほどフラッシュ光が届かない遠距離領域で、演算値が大きいほどフラッシュ光が届く近距離領域であると判別して、WB補正における重み付け係数が決定される。
【0044】
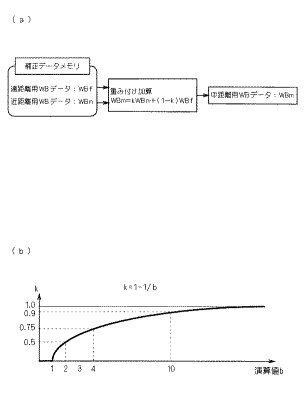
図7は、重み付け係数の決定方法を説明するための図である。
【0045】
図7(a)に示すように、遠距離用(外光用)のWBデータ(WB補正値)をWBf、近距離用(フラッシュ光用)のWBデータをWBnとすると、中距離用(外光とフラッシュ光との混在状態)のWBデータであるWBmは、以下の式で算出する。
【0046】
WBm=k・WBn+(1−k)WBf・・・・・・式(1):
k=1−1/b・・・・・・・・・・・・・・・・式(2):
ここで、kは重み付け係数(合成比率)で、bは図6に示す画像Gcの各画素における演算値である。上記の式(2)における重み付けkと演算値bとの関係は図7(b)のように表される。
【0047】
図7(b)に示すように、演算値bが2である場合にはk=0.5となる。すなわち、本撮影時の輝度は、外光による影響とフラッシュ発光による影響とが1:1でミックスされたものであると考える。
【0048】
同様に、演算値bが10である場合には、k=0.1となる。すなわち、本撮影時の輝度は、外光による影響とフラッシュ発光による影響とが1:9でミックスされたものと考える。
【0049】
以上のように、距離情報として算出された演算値(画像データGc)に基づき、各画素に対してWB補正値(画像補整パラメータ)を調整することにより、本撮影で取得された画像Gbの各画素に対して適切なWB補正を行うことができる。すなわち、単に2種類(遠距離用、近距離用)のWBデータを遠距離領域と近距離領域とに使い分けるだけでは、これらの境界部分で大きな輝度差が生じるおそれがあるが、2種類のWBデータを距離情報に応じて重み付け演算することにより、境界部分の不自然な輝度差を抑えることができる。その結果、フラッシュ光を伴う撮影においても、自然なWB補正を行えることとなる。
【0050】
<デジタルカメラ1Aの動作>
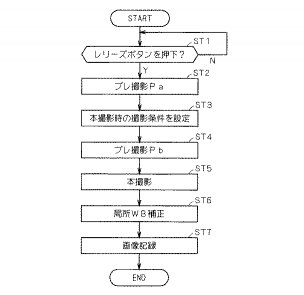
図8は、デジタルカメラ1Aにおける基本的な動作を説明するフローチャートである。本動作は、特に上述した局所WB補正の処理を示しており、CPU23において実行される。
【0051】
ステップST1では、ユーザによりレリーズボタン14が押下されたかを判定する。ここで、レリーズボタン14が押下された場合には、CPU23がこの時の撮影条件および画像処理モードの設定を読取ってステップST2に進む。一方、レリーズボタン14が押下されていない場合には、ステップST1に戻る。
【0052】
ステップST2では、フラッシュ11を発光させて、プレ撮影Paを行う。すなわち、撮影レンズ駆動部24を介して撮影レンズ10を被写体に合焦させるべく駆動した後、CCD2の積分を行う。このCCD2の積分動作を行う間に、CPU23がフラッシュ発光を指示、すなわちフラッシュ11の発光開始および発光停止を指示して適切な光量となるようにフラッシュ11を制御する。そして、CCD2での積分が終了するとCCD2から画像データを読み出し、メモリ29に保存する。
【0053】
ステップST3では、ステップST2のプレ撮影Paで取得された画像データから、本撮影時における撮影条件の設定を行う。具体的には、本撮影時のフラッシュ発光のタイミングや発光時間を決定し、また必要に応じて撮影条件の変更を行う。
【0054】
ステップST4では、ステップST3で設定された撮影条件で、フラッシュ11の発光を伴わないプレ撮影Pbを行う。このプレ撮影Pbで取得された画像は、メモリ29に保存される。
【0055】
ステップST5では、ステップST3で設定された撮影条件で、フラッシュ11の発光を伴う本撮影を行う。この本撮影で取得された画像は、メモリ29に保存される。
【0056】
ステップST6では、上述した局所WB補正を行う。具体的には、CPU23が本撮影で取得された画像Gbの画素Aをメモリ29から読出すとともに、プレ撮影Pbで取得された画像Gaにおける画素Aに対応する画素aをメモリ29から読出して、これらの画素の演算、つまり除算(A÷a)を行う。そして、この除算結果つまり画素値の比率から図7(b)つまり上の式(2)に基づき、重み係数kを決定する。次に、CPU23は、算出された重み係数kと本画像Gbの画素Aとを画像処理部28に送るとともに、補正データメモリ31から遠距離用のWB補正データWBfと近距離用のWB補正データWBnとを読出して画像処理部28に送るように命令する。
【0057】
画像処理部28では、受取った本画像の画素A、重み係数k、遠距離用WBデータWBfおよび近距離用WBデータWBnに基づき、上記の式(1)の加重平均(換言すれば内挿)処理によって本撮影の画素Aに関して中距離用WBデータWBmを算出する。次に、この中距離用WBデータWBmに基づき、本撮影で取得された画像Gbの画素Aに対するWB補正を行う。そして、この局所WB補正を本画像Gbの全画素に施こし、画像全体に適切なWB補正を行う。
【0058】
ステップST7では、ステップST6でWB補正が施された画像データをメモリカード9に記録する。
【0059】
以上のデジタルカメラ1Aの動作より、フラッシュ発光を伴う発光画像とフラッシュ発光を伴わない非発光画像とから距離情報を求めるため、迅速に被写体に関する距離情報を取得できる。また、この距離情報に基づきWB補正を行うため、迅速で適切なWB補正を行える。すなわち、距離情報に基づき2種類のWB補正データを使い分けるとともに、重み付け加算されたWB補正データを利用することで、画面全体で自然なWB補正が行えることとなる。
【0060】
<第2実施形態>
本発明の第2実施形態に係るデジタルカメラ1Bは、図1〜3に示す第1実施形態のデジタルカメラ1Aと類似の構成を有しているが、メモリ29の構成が異なっている。
【0061】
すなわち、メモリ29では、以下で説明する局所γ補正の処理をCPU23で行う動作プログラムが格納されている。
【0062】
<局所γ補正について>
局所補正設定キー21がON(表2参照)の場合、すなわち局所補正有りが選択されている場合には、局所γ補正がデジタルカメラ1Bで行われる。
【0063】
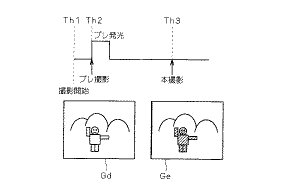
図9は、局所γ補正のための撮影手順を説明するタイミングチャートである。
【0064】
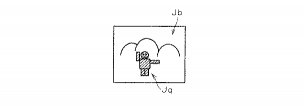
理解を容易にするため、例えば図10に示す構図で被写体を撮影する場合、具体的には野外撮影において逆光状態で主被写体(人物)Jpを撮影する場合を考える。逆光においては、フラッシュ撮影により、主被写体Jpが暗く撮影されるのを回避できるが、撮影された画像は主被写体Jqのみがフラッシュで照らされるため、背景Jbに対して浮き上がってしまい、全体として不自然な画像となる。
【0065】
そこで、この不自然さを解消するため、ユーザにより局所補正設定キー21がOnされている場合には、次で説明する逆行撮影時のγ補正(階調補正)によって低輝度となる主被写体Jqの輝度補正を行うこととする。
【0066】
まず、ユーザがレリーズボタン14を押下する動作Th1により、撮影が開始されると、本撮影前にプレ撮影の動作Th2が行われる。このプレ撮影では、フラッシュ11を発光する発光状態で撮影され、CCD2では画像Gd(図9)が取得される。
【0067】
次に、本撮影の動作Th3が行われる。この本撮影では、フラッシュ11を発光しない非発光状態で撮影され、CCD2では画像Ge(図9)が取得される。
【0068】
本撮影の後には、局所γ補正が行われるが、この局所γ補正について以下で詳述する。
【0069】
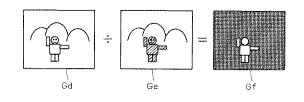
図11は、局所γ補正の方法を説明するための図である。
【0070】
局所γ補正では、まず本撮影で取得された画像Geに対してプレ撮影Th2により取得された画像Gdを、対応する各画素について除算する処理が行われる。これにより、演算結果を表す画像Gfが得られる。この画像Gfでは、本撮影においてフラッシュ光が多く当たる部分、例えば人物Jpなどで演算値が高く、フラッシュ光が当たらない背景Jbで演算値が低くなる。
【0071】
そして、画像Gfにおける演算値を距離情報とし、距離に応じて逆光部用のγ補正と非逆光部光用のγ補正の重み係数を決定する。すなわち、演算値が1に近いほどフラッシュ光が届かない遠距離部(非逆光部)で、演算値が大きいほどフラッシュ光が届く近距離部(逆光部)であると判断し、γ補正における重み係数が決定される。
【0072】
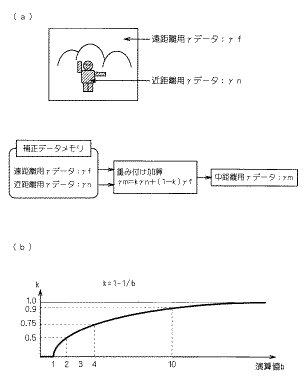
図12は、重み付け係数の決定方法を説明するための図である。
【0073】
図12(a)に示すように、遠距離用のγデータをγf、近距離用のγデータをγnとすると、逆行・非逆行の境界付近である中距離用のγデータγmは、以下の式で算出する。
【0074】
γm=k・γn+(1−k)γf・・・・・・・・・式(3):
k=1−1/b・・・・・・・・・・・・・・・・式(4):
ここで、kは重み付け係数で、bは図11に示す画像Gfの各画素における演算値である。上記の式(4)におけるkとbとの関係は図12(b)のように表される。
【0075】
図12(b)に示すように、演算値が2である場合には重み係数k=0.5となる。同様に、演算値が10である場合には、重み係数k=0.1となる。
【0076】
以上のように、距離情報として算出された演算値(画像データGf)に基づく加重平均(ないしは内挿)処理を行うことにより、各画素に対してγ補正値(画像補整パラメータ)を調整することにより、本撮影で取得された画像Geの各画素に対して適切なγ補正を行うことができる。すなわち、逆光撮影においても、自然な逆光補正を行えることとなる。
【0077】
<デジタルカメラ1Bの動作>
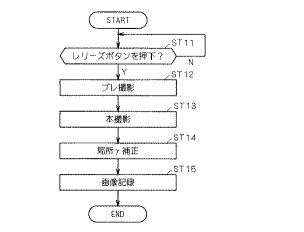
図13は、デジタルカメラ1Bにおける基本的な動作を説明するフローチャートである。本動作は、特に上述した局所γ補正の処理を示しており、CPU23において実行される。
【0078】
ステップST11では、ユーザによりレリーズボタン14が押下されたかを判定する。ここで、レリーズボタン14が押下された場合には、CPU23がこの時の撮影条件および画像処理モードの設定を読取ってステップST12に進む。一方、レリーズボタン14が押下されていない場合には、ステップST11に戻る。
【0079】
ステップST12では、フラッシュ11を発光させて、プレ撮影を行う。すなわち、撮影レンズ駆動部24を介して撮影レンズ10を被写体に合焦させるべく駆動した後、CCD2の積分を行う。このCCD2の積分動作を行う間に、CPU23がフラッシュ11の発光開始および発光停止を指示して適切な光量となるようにフラッシュ11を制御する。そして、CCD2での積分が終了するとCCD2から画像データを読み出し、メモリ29に保存する。
【0080】
ステップST13では、フラッシュ11の発光を伴なわない本撮影を行う。この本撮影で取得された画像は、メモリ29に保存される。
【0081】
ステップST14では、上述した局所γ補正を行う。具体的には、CPU23が本撮影で取得された画像Geの画素Aをメモリ29から読出すとともに、プレ撮影で取得された画像Gdにおける画素Aに対応する画素aをメモリ29から読出して、これらの画素の演算、つまり除算(A÷a)を行う。そして、この除算結果から図12(b)つまり上の式(4)に基づき、逆光部分と非逆光部分とを判別して重み係数kを決定する。次に、CPU23は、算出された重み係数kと本画像Geの画素Aとを画像処理部28に送るとともに、補正データメモリ31から遠距離用(非逆光用)のγ補正データγfと近距離用(逆光用)のγ補正データγnとを読出して画像処理部28に送るように命令する。
【0082】
画像処理部28では、受取った本画像の画素A、重み係数k、遠距離用γデータγfおよび近距離用γデータγnに基づき、上記の式(3)に従って本撮影の画素Aに関して中距離用γデータγmを算出する。そして、この中距離用γデータγmに基づき、本撮影で取得された画像Geの画素Aに対するγ補正を行う。そして、この局所γ補正を全画素に施こし、画像全体に適切なγ補正を行う。
【0083】
ステップST15では、ステップST14でγ補正が施された画像データをメモリカード9に記録する。
【0084】
以上のデジタルカメラ1Bの動作より、フラッシュ発光を伴う発光画像とフラッシュ発光を伴わない非発光画像とから距離情報を求めるため、被写体に関する距離情報を迅速に取得できる。また、この距離情報に基づきγ補正を行うため、逆光撮影時においても迅速で適切なγ補正を行える。すなわち、距離情報に基づき2種類のγ補正データを使い分けるとともに、重み付け加算されたγ補正データを利用することで、画面全体で自然なγ補正が行える。
【0085】
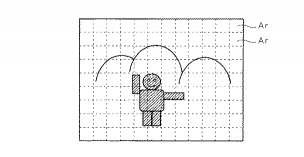
なお、逆光領域の判断については、図14に示すように、ライブビュー中の画像を複数の領域Arに分割し、各領域ArにおけるAE情報に基づき行っても良い。
【0086】
すなわち、各々の領域ArにおけるAEを計算し、主被写体部分の領域における露光量と背景部分の領域における露光量とを比較し、(背景部分の露光量)−(主被写体部分の露光量)が所定の閾値以上である場合、主被写体部分の領域には逆光用のγ補正データを、背景部分の領域には非逆光用のγ補正データを用いて、補正を行う。また、逆光、非逆光領域の境界付近ではAEのデータから重み付け係数を決定し、境界付近で不自然にならないようにする。なお、主被写体領域の判別については、合焦エリアと重なる領域を主被写体領域と見なしても良い。
【0087】
<変形例>
◎上記の第1実施形態における局所WB補正については、デジタルカメラ内で処理を行うのは必須でなく、デジタルカメラ外部の情報処理装置で処理を行っても良い。
【0088】
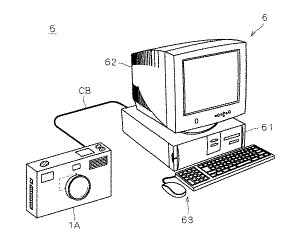
図15は、本発明の変形例に係る画像処理システム5の要部構成を示す図である。
【0089】
画像処理システム5においては、第1実施形態のデジタルカメラ1Aと、デジタルカメラ1AにケーブルCBを介して通信可能に接続する情報処理装置6とを備えている。
【0090】
情報処理装置6は、例えばパーソナルコンピュータとして構成されており、本体部61と、表示部62と、操作部63とを有している。本体部61は、CPUとメモリとを有している。このCPUでは、図8に示すステップST6の局所WB補正を行う処理プログラムを実行できる。
【0091】
この画像処理システム5では、デジタルカメラ1Aで図8に示すステップST1〜ST5までの動作を行った後に、プレ撮影Pbで取得したフラッシュ非発光画像と、本撮影で取得したフラッシュ発光画像とを情報処理装置6に伝送する。
【0092】
そして、フラッシュ発光画像およびフラッシュ非発光画像を受け取った情報処理装置6では、上記の処理プログラムを実行することにより、上記の局所WB補正を行う。これにより、被写体までの距離に応じたWB補正データが算出でき、フラッシュ非発光画像および/またはフラッシュ発光画像に対するWB補正に反映できる。
【0093】
このような画像処理システム5により、第1実施形態と同様の局所WB補正が情報処理装置6で行えることとなる。
【0094】
なお、デジタルカメラ1Aの代わりに第2実施形態のデジタルカメラ1Bを情報処理装置6に接続しても良い。この場合には、図13のステップST14に示す局所γ補正を情報処理装置6で行うこととなる。
【0095】
◎上記の各実施形態については、デジタルカメラにフラッシュを設けるのは必須でなく、デジタルカメラに着脱可能な外付けフラッシュを使用しても良い。
【0096】
◎上記の各実施形態については、1画素ごとに除算して演算値を求めるのは必須でなく、画面全体を複数の領域に分割して領域ごとに1の演算値を求めても良い。この場合には、算出された演算値に基づき、各領域ごとに2種類の補正データを使い分けるとともに、重み付け加算により中間的な補正データを算出する。これにより、画素ごとに演算するより、演算負荷の軽減が図れることとなる。
【0097】
◎上述した具体的実施形態には、以下の構成を有する発明が含まれている。
【0098】
(1)生成手段は、発光画像と非発光画像とに関する画素値の比率に基づき、距離情報を生成する手段を有することを特徴とするデジタルカメラ。
【0099】
これにより、距離情報を迅速に把握できる。
【0100】
(2)生成手段は、発光画像と非発光画像とに基づき、撮影画像データにおける近距離領域と遠距離領域とを判別する判別手段を有することを特徴とするデジタルカメラ。
【0101】
これにより、近距離領域と遠距離領域とを迅速に把握できる。
【0102】
(3)撮影開始を指示する撮影指示手段と、前記撮影指示手段による前記撮影開始から、発光画像および非発光画像を取得した後に、本撮影を行う撮影制御手段とをさらに備えることを特徴とするデジタルカメラ。
【0103】
これにより、デジタルカメラの操作性が向上する。
【0104】
(4)決定手段は、2の補正データについて前記距離情報に応じた合成比率に基づく演算を行い、画像補正パラメータを決定する手段を有することを特徴とするデジタルカメラ。
【0105】
これにより、境界が目立たなくなり、画質が向上する。
【0106】
【発明の効果】
以上説明したように、請求項1ないし請求項5の発明によれば、フラッシュ発光を伴って取得された発光画像とフラッシュ発光を伴わずに取得された非発光画像とに基づき生成された距離情報に応じて、撮影画像データに対する画像補正パラメータを決定する。その結果、被写体に関する距離情報を迅速に取得できるとともに、適切な画像補正が行える。
【0107】
特に、請求項2の発明においては、画像補正パラメータがホワイトバランス補正に係るパラメータであるため、適切なホワイトバランス補正が迅速に行える。
【0108】
また、請求項3の発明においては、画像補正パラメータが階調補正に係るパラメータであるため、適切な階調補正が迅速に行える。
【0109】
また、請求項4の発明においては、本撮影はフラッシュ発光を伴った撮影であるため、フラッシュ発光を伴い取得された撮影画像に対しても適切な画像補正が行える。
【図面の簡単な説明】
【図1】本発明の第1実施形態に係るデジタルカメラ1Aを示す斜視図である。
【図2】デジタルカメラ1Aの背面図である。
【図3】デジタルカメラ1Aの機能ブロックを示す図である。
【図4】局所WB補正のための撮影手順を説明するタイミングチャートである。
【図5】局所WB補正を説明するための図である。
【図6】局所WB補正の方法を説明するための図である。
【図7】重み付け係数の決定方法を説明するための図である。
【図8】デジタルカメラ1Aにおける基本的な動作を説明するフローチャートである。
【図9】局所γ補正のための撮影手順を説明するタイミングチャートである。
【図10】局所γ補正を説明するための図である。
【図11】局所γ補正の方法を説明するための図である。
【図12】重み付け係数の決定方法を説明するための図である。
【図13】デジタルカメラ1Bにおける基本的な動作を説明するフローチャートである。
【図14】逆光領域の判別を説明するための図である。
【図15】本発明の変形例に係る画像処理システム5の要部構成を示す図である。
【符号の説明】
1A、1B デジタルカメラ
2 CCD
5 画像処理システム
6 情報処理装置
11 フラッシュ
14 レリーズボタン
20 撮影・再生切換えキー
21 局所補正設定キー
23 CPU
28 画像処理部
29 メモリ
31 補正データメモリ
【0001】
【発明の属する技術分野】
本発明は、被写体に係る撮影画像データを取得する撮影手段を備えるデジタルカメラの技術に関する。
【0002】
【従来の技術】
デジタルカメラにおいては、例えば特許文献1のように、撮影エリアを60×96のブロックに分割し、これらの5760個のブロックについて1ブロック毎に被写体の距離情報を求め、この距離情報に基づきブロック毎のホワイトバランス係数を求める技術が開示されている。そして、ブロック内の画素(8×8画素)について一律にホワイトバランス補正を行う。
【0003】
【特許文献1】
特開平7−301842号公報
【0004】
【発明が解決しようとする課題】
しかしながら、特許文献1の技術では、距離情報を決定するのに多数のブロックそれぞれについて測距演算を行う必要があるため、撮像素子の画素数が多くなるほど距離情報を取得するのに多大な時間が必要となる。これにより、撮影準備に多くの時間が必要となり、レリーズタイムラグを引き起こしシャッターチャンスを逃す場合がある。
【0005】
また、特許文献1では、各ブロックごとに得られた距離情報については、ホワイトバランス補正の利用に限定している。しかし、実際のデジタルカメラにおいては、被写体に応じた輝度の補正や、例えば特殊フィルタによる空間周波数情報の特異点(特異領域)の補正を行うことが必要なケースがあるが、これらに対する適用は考慮されていない。
【0006】
本発明は、上記課題に鑑みてなされたものであり、被写体に関する距離情報を迅速に取得できるデジタルカメラの技術を提供することを目的とする。
【0007】
【課題を解決するための手段】
上記の課題を解決するため、請求項1の発明は、デジタルカメラであって、(a)被写体に係る撮影画像データを取得する撮影手段と、(b)フラッシュ発光を指示する発光指示手段と、(c)前記撮影手段によって、前記被写体に係る前記フラッシュ発光を伴った発光画像を取得する発光撮影手段と、(d)前記撮影手段によって、前記被写体に係る前記フラッシュ発光を伴わない非発光画像を取得する非発光撮影手段と、(e)前記発光画像と前記非発光画像とに基づき、前記被写体に関する距離情報を生成する生成手段と、(f)前記距離情報に応じて、前記撮影画像データに対する画像補正パラメータを決定する決定手段とを備える。
【0008】
また、請求項2の発明は、請求項1の発明に係るデジタルカメラにおいて、前記画像補正パラメータは、ホワイトバランス補正に係るパラメータである。
【0009】
また、請求項3の発明は、請求項1の発明に係るデジタルカメラにおいて、前記画像補正パラメータは、階調補正に係るパラメータである。
【0010】
また、請求項4の発明は、請求項1の発明に係るデジタルカメラにおいて、本撮影は、前記フラッシュ発光を伴った撮影である。
【0011】
また、請求項5の発明は、フラッシュ発光を伴って取得された被写体に係る発光画像と、フラッシュ発光を伴わずに取得された前記被写体に係る非発光画像とに対する処理が可能なコンピュータによって実行されることにより、前記コンピュータに、(a)前記発光画像と前記非発光画像とに基づき、前記被写体に関する距離情報を生成する生成工程と、(b)前記距離情報に応じて、前記発光画像および/または前記非発光画像に対する画像補正パラメータを決定する決定工程とを実行させる処理プログラムである。
【0012】
【発明の実施の形態】
<第1実施形態>
<デジタルカメラの要部構成>
図1は、本発明の第1実施形態に係るデジタルカメラ1Aを示す斜視図である。また、図2は、デジタルカメラ1Aの背面図である。なお、図1および図2には方位関係を明確にするために互いに直交するX,Y,Zの三軸を示している。
【0013】
デジタルカメラ1Aの前面には、撮影レンズ10とフラッシュ11と測距窓12とファインダ窓13とが設けられている。撮影レンズ10の内側には撮影レンズ10を介して入射する被写体像を光電変換して画像信号を生成する撮像素子(撮像手段)であるCCD(Charge Coupled Device)2が設けられている。
【0014】
撮影レンズ10には光軸方向に沿って駆動可能なレンズ系が含まれており、当該レンズ系を光軸方向に駆動することにより、CCD2に結像される被写体像の合焦状態を実現することができるように構成されている。
【0015】
デジタルカメラ1Aの上面には、レリーズボタン14と、撮影モード設定キー15と、液晶パネル16とが配置されている。レリーズボタン14は被写体の撮影を行うときにユーザが押下操作を行ってデジタルカメラ1Aに撮影指示を与えるボタンである。
【0016】
撮影モード設定キー15では、液晶パネル16に表示される設定情報をユーザが視認しつつ、絞り優先やシャッタースピード優先という露光条件の設定や、マクロ撮影の切替え、ズーム等の設定が可能となっている。
【0017】
デジタルカメラ1Aの側面には、ユーザによるレリーズボタン14の押下操作に伴う本撮影動作で得られる画像データを記録するためのメモリカード9を着装する挿入口17が設けられている。
【0018】
デジタルカメラ1Aの背面には、本撮影前に被写体を動画的態様で表示するライブビュー表示や、撮影した画像等の表示を行うための液晶モニタ18と、ファインダ窓13に対応するファインダ19と、撮影・再生切替えキー20と、局所補正設定キー21と、カーソルキー22とが設けられている。
【0019】
撮影・再生切替えキー20は、撮影モード、再生モードのモード切替えを行うための操作部材である。具体的には、ユーザにより次の表1のように撮影状態または再生状態が選択される。
【0020】
【表1】
【0021】
局所補正設定キー21は、後述する局所補正を指示する操作部材である。具体的には、ユーザにより次の表2のように局所補正の有無が選択される。
【0022】
【表2】
【0023】
すなわち、ユーザが局所補正設定キー21をONする場合には、局所補正が撮影時に行われる。一方、ユーザが局所補正設定キー21をOFFする場合には、通常の補正つまり画像全体に対して一様な補正が撮影時に行われる。
【0024】
カーソルキー22は、撮影時のズーミングを調整したり、画像再生時のコマ送り等を行うための操作部材である。
【0025】
図3は、デジタルカメラ1Aの機能ブロックを示す図である。図中において、矢印付き太線は画像データの流れを示し、矢印付き細線は制御データの流れを示している。
【0026】
まず、ユーザは、撮影・再生切換えキー20と液晶モニタ18とで、表1に示す撮影状態か再生状態かを選択する。以下では、撮影状態と再生状態とに分けて説明する。
【0027】
(1)撮影状態
撮影・再生切換えキー20がOFFの場合、すなわち撮影状態が設定されている場合には、ユーザは撮影モード設定キー15と液晶パネル16とにより、絞り優先、シャッタスピード優先といった露光条件の設定や、ホワイトバランスモードの切替えなどの設定が行える。
【0028】
レリーズボタン14が押下されると、CPU23は、その時の撮影条件および画像処理モードの設定を読み取り撮影動作を行う。この場合、撮影条件の設定でフラッシュ発光を伴う撮影モードが選択されていれば、CPU23は、発光タイミングや発光時間に従ってフラッシュ11を制御する。この場合、計時部30によりフラッシュ11の発光開始や発光停止の計時が行われることとなる。
【0029】
この撮影動作では、撮影レンズ駆動部24を介して、撮影レンズ10を被写体に合焦させるように駆動する。そして、CCD2の積分動作、つまりCCDで電荷蓄積を行い、画像データが読出される。このCCD2は、CCD・I/F25を介して駆動制御が行われており、駆動タイミングパルスはTG(タイミング・ジェネレータ)25により生成される。また、タイミング制御部26は、TG25およびA/Dコンバータ27に対するクロックを生成する。
【0030】
CCD2で取得された画像データは、A/Dコンバータ27でデジタルデータに変換される。このA/Dコンバータ27は、タイミング制御部26で生成されるタイミングパルスに基づいて、CCD2から出力されるアナログ信号をデジタル信号に変換する。
【0031】
画像処理部28では、A/Dコンバータ27から伝送される画像データに対して、例えばゲイン処理やホワイトバランス補正などの画像処理を行い、処理された画像データは記録媒体として働くメモリカード9に記録される。この画像処理部28において、後述する局所WB補正が行われる場合には、補正データメモリ31から必要な補正データが読出されることとなる。
【0032】
(2)再生状態
撮影・再生切換えキー20がONの場合、すなわち再生状態に設定されている場合には、CPU23は、メモリカード9から画像データを読出し、メモリ29に一旦記憶する制御を行う。そして、CPU23は、メモリ29に記憶された画像データを画像処理部28に転送する。画像処理部28では、メモリ29から転送された画像データを液晶モニタ18で表示可能なフォーマットに変換する処理を行い、変換された画像データは液晶モニタ18に送られて、その表示が行われる。
【0033】
<局所WB補正について>
局所補正設定キー21がON(表2参照)の場合、すなわち局所補正有りが選択されている場合には、局所WB補正がデジタルカメラ1Aで行われる。
【0034】
図4は、局所WB補正のための撮影手順を説明するタイミングチャートである。
【0035】
理解を容易にするため、例えば図5に示す構図で被写体を撮影する場合を考える。すなわち、夜間の撮影で主被写体(人物)Jpの背後に木Jtがあり、遠くに月Jmがある。この構図でフラッシュ撮影を行う場合には、主被写体Jpにはフラッシュ光が適切に当たり、また背後の木Jtにはフラッシュ光が僅かに届くものの、月Jmに関してはフラッシュ光の効果がない状況となる。
【0036】
このような状況において、画面全体に対し一様にフラッシュ光用のホワイトバランス(WB)補正を行うと、人物Jpは適切にWB補正が施されるが、木Jtおよび月JmはWBが崩れてしまい、全体として不自然な画像となる。
【0037】
そこで、局所補正設定キー21がONされている場合で、フラッシュ撮影時には、画面全体に一様にWB補正を施すのではなく、各部分つまり局所ごとに異なるWB補正を行うようにする。この処理の詳細を次で説明する。
【0038】
まず、ユーザがレリーズボタン14を押下する動作Tg1により、撮影が開始されると、本撮影前にフラッシュ11によるプレ発光の動作Tg2が行われプレ撮影Paが実施される。そして、このプレ発光を伴って取得された画像に基づき、本撮影における最終的な撮影条件を決定する動作Tg3が行われる。
【0039】
次に、決定した撮影条件でプレ撮影Pbの動作Tg4が行われる。このプレ撮影Pbでは、フラッシュ11を発光しない非発光状態で撮影され、CCD2では画像(発光画像)Ga(図4)が取得される。その後、フラッシュ11を本発光させる発光状態で本撮影の動作Tg5が行われ、CCD2では画像(非発光画像)Gb(図4)が取得される。
【0040】
本撮影の後には、局所WB補正が行われるが、この局所WB補正について以下で詳述する。
【0041】
図6は、局所WB補正の方法を説明するための図である。
【0042】
局所WB補正では、まず本撮影で取得された画像Gbに対してプレ撮影Pbにより取得された画像Gaを、対応する各画素について除算する処理が行われる。これにより、演算結果を表す画像Gcが生成される。この画像Gcでは、本撮影においてフラッシュ光が多く当たる部分、例えば人物Jpなどで演算値が高く、フラッシュ光が当たらない部分、例えば月などで演算値は低くなる。
【0043】
そして、画像Gcにおける各演算値を距離情報とし、距離に応じて外光用のWB補正値とフラッシュ光用のWB補正値との重み付け係数(以下では「重み係数」ともいう)を決定する。すなわち、演算値が1に近いほどフラッシュ光が届かない遠距離領域で、演算値が大きいほどフラッシュ光が届く近距離領域であると判別して、WB補正における重み付け係数が決定される。
【0044】
図7は、重み付け係数の決定方法を説明するための図である。
【0045】
図7(a)に示すように、遠距離用(外光用)のWBデータ(WB補正値)をWBf、近距離用(フラッシュ光用)のWBデータをWBnとすると、中距離用(外光とフラッシュ光との混在状態)のWBデータであるWBmは、以下の式で算出する。
【0046】
WBm=k・WBn+(1−k)WBf・・・・・・式(1):
k=1−1/b・・・・・・・・・・・・・・・・式(2):
ここで、kは重み付け係数(合成比率)で、bは図6に示す画像Gcの各画素における演算値である。上記の式(2)における重み付けkと演算値bとの関係は図7(b)のように表される。
【0047】
図7(b)に示すように、演算値bが2である場合にはk=0.5となる。すなわち、本撮影時の輝度は、外光による影響とフラッシュ発光による影響とが1:1でミックスされたものであると考える。
【0048】
同様に、演算値bが10である場合には、k=0.1となる。すなわち、本撮影時の輝度は、外光による影響とフラッシュ発光による影響とが1:9でミックスされたものと考える。
【0049】
以上のように、距離情報として算出された演算値(画像データGc)に基づき、各画素に対してWB補正値(画像補整パラメータ)を調整することにより、本撮影で取得された画像Gbの各画素に対して適切なWB補正を行うことができる。すなわち、単に2種類(遠距離用、近距離用)のWBデータを遠距離領域と近距離領域とに使い分けるだけでは、これらの境界部分で大きな輝度差が生じるおそれがあるが、2種類のWBデータを距離情報に応じて重み付け演算することにより、境界部分の不自然な輝度差を抑えることができる。その結果、フラッシュ光を伴う撮影においても、自然なWB補正を行えることとなる。
【0050】
<デジタルカメラ1Aの動作>
図8は、デジタルカメラ1Aにおける基本的な動作を説明するフローチャートである。本動作は、特に上述した局所WB補正の処理を示しており、CPU23において実行される。
【0051】
ステップST1では、ユーザによりレリーズボタン14が押下されたかを判定する。ここで、レリーズボタン14が押下された場合には、CPU23がこの時の撮影条件および画像処理モードの設定を読取ってステップST2に進む。一方、レリーズボタン14が押下されていない場合には、ステップST1に戻る。
【0052】
ステップST2では、フラッシュ11を発光させて、プレ撮影Paを行う。すなわち、撮影レンズ駆動部24を介して撮影レンズ10を被写体に合焦させるべく駆動した後、CCD2の積分を行う。このCCD2の積分動作を行う間に、CPU23がフラッシュ発光を指示、すなわちフラッシュ11の発光開始および発光停止を指示して適切な光量となるようにフラッシュ11を制御する。そして、CCD2での積分が終了するとCCD2から画像データを読み出し、メモリ29に保存する。
【0053】
ステップST3では、ステップST2のプレ撮影Paで取得された画像データから、本撮影時における撮影条件の設定を行う。具体的には、本撮影時のフラッシュ発光のタイミングや発光時間を決定し、また必要に応じて撮影条件の変更を行う。
【0054】
ステップST4では、ステップST3で設定された撮影条件で、フラッシュ11の発光を伴わないプレ撮影Pbを行う。このプレ撮影Pbで取得された画像は、メモリ29に保存される。
【0055】
ステップST5では、ステップST3で設定された撮影条件で、フラッシュ11の発光を伴う本撮影を行う。この本撮影で取得された画像は、メモリ29に保存される。
【0056】
ステップST6では、上述した局所WB補正を行う。具体的には、CPU23が本撮影で取得された画像Gbの画素Aをメモリ29から読出すとともに、プレ撮影Pbで取得された画像Gaにおける画素Aに対応する画素aをメモリ29から読出して、これらの画素の演算、つまり除算(A÷a)を行う。そして、この除算結果つまり画素値の比率から図7(b)つまり上の式(2)に基づき、重み係数kを決定する。次に、CPU23は、算出された重み係数kと本画像Gbの画素Aとを画像処理部28に送るとともに、補正データメモリ31から遠距離用のWB補正データWBfと近距離用のWB補正データWBnとを読出して画像処理部28に送るように命令する。
【0057】
画像処理部28では、受取った本画像の画素A、重み係数k、遠距離用WBデータWBfおよび近距離用WBデータWBnに基づき、上記の式(1)の加重平均(換言すれば内挿)処理によって本撮影の画素Aに関して中距離用WBデータWBmを算出する。次に、この中距離用WBデータWBmに基づき、本撮影で取得された画像Gbの画素Aに対するWB補正を行う。そして、この局所WB補正を本画像Gbの全画素に施こし、画像全体に適切なWB補正を行う。
【0058】
ステップST7では、ステップST6でWB補正が施された画像データをメモリカード9に記録する。
【0059】
以上のデジタルカメラ1Aの動作より、フラッシュ発光を伴う発光画像とフラッシュ発光を伴わない非発光画像とから距離情報を求めるため、迅速に被写体に関する距離情報を取得できる。また、この距離情報に基づきWB補正を行うため、迅速で適切なWB補正を行える。すなわち、距離情報に基づき2種類のWB補正データを使い分けるとともに、重み付け加算されたWB補正データを利用することで、画面全体で自然なWB補正が行えることとなる。
【0060】
<第2実施形態>
本発明の第2実施形態に係るデジタルカメラ1Bは、図1〜3に示す第1実施形態のデジタルカメラ1Aと類似の構成を有しているが、メモリ29の構成が異なっている。
【0061】
すなわち、メモリ29では、以下で説明する局所γ補正の処理をCPU23で行う動作プログラムが格納されている。
【0062】
<局所γ補正について>
局所補正設定キー21がON(表2参照)の場合、すなわち局所補正有りが選択されている場合には、局所γ補正がデジタルカメラ1Bで行われる。
【0063】
図9は、局所γ補正のための撮影手順を説明するタイミングチャートである。
【0064】
理解を容易にするため、例えば図10に示す構図で被写体を撮影する場合、具体的には野外撮影において逆光状態で主被写体(人物)Jpを撮影する場合を考える。逆光においては、フラッシュ撮影により、主被写体Jpが暗く撮影されるのを回避できるが、撮影された画像は主被写体Jqのみがフラッシュで照らされるため、背景Jbに対して浮き上がってしまい、全体として不自然な画像となる。
【0065】
そこで、この不自然さを解消するため、ユーザにより局所補正設定キー21がOnされている場合には、次で説明する逆行撮影時のγ補正(階調補正)によって低輝度となる主被写体Jqの輝度補正を行うこととする。
【0066】
まず、ユーザがレリーズボタン14を押下する動作Th1により、撮影が開始されると、本撮影前にプレ撮影の動作Th2が行われる。このプレ撮影では、フラッシュ11を発光する発光状態で撮影され、CCD2では画像Gd(図9)が取得される。
【0067】
次に、本撮影の動作Th3が行われる。この本撮影では、フラッシュ11を発光しない非発光状態で撮影され、CCD2では画像Ge(図9)が取得される。
【0068】
本撮影の後には、局所γ補正が行われるが、この局所γ補正について以下で詳述する。
【0069】
図11は、局所γ補正の方法を説明するための図である。
【0070】
局所γ補正では、まず本撮影で取得された画像Geに対してプレ撮影Th2により取得された画像Gdを、対応する各画素について除算する処理が行われる。これにより、演算結果を表す画像Gfが得られる。この画像Gfでは、本撮影においてフラッシュ光が多く当たる部分、例えば人物Jpなどで演算値が高く、フラッシュ光が当たらない背景Jbで演算値が低くなる。
【0071】
そして、画像Gfにおける演算値を距離情報とし、距離に応じて逆光部用のγ補正と非逆光部光用のγ補正の重み係数を決定する。すなわち、演算値が1に近いほどフラッシュ光が届かない遠距離部(非逆光部)で、演算値が大きいほどフラッシュ光が届く近距離部(逆光部)であると判断し、γ補正における重み係数が決定される。
【0072】
図12は、重み付け係数の決定方法を説明するための図である。
【0073】
図12(a)に示すように、遠距離用のγデータをγf、近距離用のγデータをγnとすると、逆行・非逆行の境界付近である中距離用のγデータγmは、以下の式で算出する。
【0074】
γm=k・γn+(1−k)γf・・・・・・・・・式(3):
k=1−1/b・・・・・・・・・・・・・・・・式(4):
ここで、kは重み付け係数で、bは図11に示す画像Gfの各画素における演算値である。上記の式(4)におけるkとbとの関係は図12(b)のように表される。
【0075】
図12(b)に示すように、演算値が2である場合には重み係数k=0.5となる。同様に、演算値が10である場合には、重み係数k=0.1となる。
【0076】
以上のように、距離情報として算出された演算値(画像データGf)に基づく加重平均(ないしは内挿)処理を行うことにより、各画素に対してγ補正値(画像補整パラメータ)を調整することにより、本撮影で取得された画像Geの各画素に対して適切なγ補正を行うことができる。すなわち、逆光撮影においても、自然な逆光補正を行えることとなる。
【0077】
<デジタルカメラ1Bの動作>
図13は、デジタルカメラ1Bにおける基本的な動作を説明するフローチャートである。本動作は、特に上述した局所γ補正の処理を示しており、CPU23において実行される。
【0078】
ステップST11では、ユーザによりレリーズボタン14が押下されたかを判定する。ここで、レリーズボタン14が押下された場合には、CPU23がこの時の撮影条件および画像処理モードの設定を読取ってステップST12に進む。一方、レリーズボタン14が押下されていない場合には、ステップST11に戻る。
【0079】
ステップST12では、フラッシュ11を発光させて、プレ撮影を行う。すなわち、撮影レンズ駆動部24を介して撮影レンズ10を被写体に合焦させるべく駆動した後、CCD2の積分を行う。このCCD2の積分動作を行う間に、CPU23がフラッシュ11の発光開始および発光停止を指示して適切な光量となるようにフラッシュ11を制御する。そして、CCD2での積分が終了するとCCD2から画像データを読み出し、メモリ29に保存する。
【0080】
ステップST13では、フラッシュ11の発光を伴なわない本撮影を行う。この本撮影で取得された画像は、メモリ29に保存される。
【0081】
ステップST14では、上述した局所γ補正を行う。具体的には、CPU23が本撮影で取得された画像Geの画素Aをメモリ29から読出すとともに、プレ撮影で取得された画像Gdにおける画素Aに対応する画素aをメモリ29から読出して、これらの画素の演算、つまり除算(A÷a)を行う。そして、この除算結果から図12(b)つまり上の式(4)に基づき、逆光部分と非逆光部分とを判別して重み係数kを決定する。次に、CPU23は、算出された重み係数kと本画像Geの画素Aとを画像処理部28に送るとともに、補正データメモリ31から遠距離用(非逆光用)のγ補正データγfと近距離用(逆光用)のγ補正データγnとを読出して画像処理部28に送るように命令する。
【0082】
画像処理部28では、受取った本画像の画素A、重み係数k、遠距離用γデータγfおよび近距離用γデータγnに基づき、上記の式(3)に従って本撮影の画素Aに関して中距離用γデータγmを算出する。そして、この中距離用γデータγmに基づき、本撮影で取得された画像Geの画素Aに対するγ補正を行う。そして、この局所γ補正を全画素に施こし、画像全体に適切なγ補正を行う。
【0083】
ステップST15では、ステップST14でγ補正が施された画像データをメモリカード9に記録する。
【0084】
以上のデジタルカメラ1Bの動作より、フラッシュ発光を伴う発光画像とフラッシュ発光を伴わない非発光画像とから距離情報を求めるため、被写体に関する距離情報を迅速に取得できる。また、この距離情報に基づきγ補正を行うため、逆光撮影時においても迅速で適切なγ補正を行える。すなわち、距離情報に基づき2種類のγ補正データを使い分けるとともに、重み付け加算されたγ補正データを利用することで、画面全体で自然なγ補正が行える。
【0085】
なお、逆光領域の判断については、図14に示すように、ライブビュー中の画像を複数の領域Arに分割し、各領域ArにおけるAE情報に基づき行っても良い。
【0086】
すなわち、各々の領域ArにおけるAEを計算し、主被写体部分の領域における露光量と背景部分の領域における露光量とを比較し、(背景部分の露光量)−(主被写体部分の露光量)が所定の閾値以上である場合、主被写体部分の領域には逆光用のγ補正データを、背景部分の領域には非逆光用のγ補正データを用いて、補正を行う。また、逆光、非逆光領域の境界付近ではAEのデータから重み付け係数を決定し、境界付近で不自然にならないようにする。なお、主被写体領域の判別については、合焦エリアと重なる領域を主被写体領域と見なしても良い。
【0087】
<変形例>
◎上記の第1実施形態における局所WB補正については、デジタルカメラ内で処理を行うのは必須でなく、デジタルカメラ外部の情報処理装置で処理を行っても良い。
【0088】
図15は、本発明の変形例に係る画像処理システム5の要部構成を示す図である。
【0089】
画像処理システム5においては、第1実施形態のデジタルカメラ1Aと、デジタルカメラ1AにケーブルCBを介して通信可能に接続する情報処理装置6とを備えている。
【0090】
情報処理装置6は、例えばパーソナルコンピュータとして構成されており、本体部61と、表示部62と、操作部63とを有している。本体部61は、CPUとメモリとを有している。このCPUでは、図8に示すステップST6の局所WB補正を行う処理プログラムを実行できる。
【0091】
この画像処理システム5では、デジタルカメラ1Aで図8に示すステップST1〜ST5までの動作を行った後に、プレ撮影Pbで取得したフラッシュ非発光画像と、本撮影で取得したフラッシュ発光画像とを情報処理装置6に伝送する。
【0092】
そして、フラッシュ発光画像およびフラッシュ非発光画像を受け取った情報処理装置6では、上記の処理プログラムを実行することにより、上記の局所WB補正を行う。これにより、被写体までの距離に応じたWB補正データが算出でき、フラッシュ非発光画像および/またはフラッシュ発光画像に対するWB補正に反映できる。
【0093】
このような画像処理システム5により、第1実施形態と同様の局所WB補正が情報処理装置6で行えることとなる。
【0094】
なお、デジタルカメラ1Aの代わりに第2実施形態のデジタルカメラ1Bを情報処理装置6に接続しても良い。この場合には、図13のステップST14に示す局所γ補正を情報処理装置6で行うこととなる。
【0095】
◎上記の各実施形態については、デジタルカメラにフラッシュを設けるのは必須でなく、デジタルカメラに着脱可能な外付けフラッシュを使用しても良い。
【0096】
◎上記の各実施形態については、1画素ごとに除算して演算値を求めるのは必須でなく、画面全体を複数の領域に分割して領域ごとに1の演算値を求めても良い。この場合には、算出された演算値に基づき、各領域ごとに2種類の補正データを使い分けるとともに、重み付け加算により中間的な補正データを算出する。これにより、画素ごとに演算するより、演算負荷の軽減が図れることとなる。
【0097】
◎上述した具体的実施形態には、以下の構成を有する発明が含まれている。
【0098】
(1)生成手段は、発光画像と非発光画像とに関する画素値の比率に基づき、距離情報を生成する手段を有することを特徴とするデジタルカメラ。
【0099】
これにより、距離情報を迅速に把握できる。
【0100】
(2)生成手段は、発光画像と非発光画像とに基づき、撮影画像データにおける近距離領域と遠距離領域とを判別する判別手段を有することを特徴とするデジタルカメラ。
【0101】
これにより、近距離領域と遠距離領域とを迅速に把握できる。
【0102】
(3)撮影開始を指示する撮影指示手段と、前記撮影指示手段による前記撮影開始から、発光画像および非発光画像を取得した後に、本撮影を行う撮影制御手段とをさらに備えることを特徴とするデジタルカメラ。
【0103】
これにより、デジタルカメラの操作性が向上する。
【0104】
(4)決定手段は、2の補正データについて前記距離情報に応じた合成比率に基づく演算を行い、画像補正パラメータを決定する手段を有することを特徴とするデジタルカメラ。
【0105】
これにより、境界が目立たなくなり、画質が向上する。
【0106】
【発明の効果】
以上説明したように、請求項1ないし請求項5の発明によれば、フラッシュ発光を伴って取得された発光画像とフラッシュ発光を伴わずに取得された非発光画像とに基づき生成された距離情報に応じて、撮影画像データに対する画像補正パラメータを決定する。その結果、被写体に関する距離情報を迅速に取得できるとともに、適切な画像補正が行える。
【0107】
特に、請求項2の発明においては、画像補正パラメータがホワイトバランス補正に係るパラメータであるため、適切なホワイトバランス補正が迅速に行える。
【0108】
また、請求項3の発明においては、画像補正パラメータが階調補正に係るパラメータであるため、適切な階調補正が迅速に行える。
【0109】
また、請求項4の発明においては、本撮影はフラッシュ発光を伴った撮影であるため、フラッシュ発光を伴い取得された撮影画像に対しても適切な画像補正が行える。
【図面の簡単な説明】
【図1】本発明の第1実施形態に係るデジタルカメラ1Aを示す斜視図である。
【図2】デジタルカメラ1Aの背面図である。
【図3】デジタルカメラ1Aの機能ブロックを示す図である。
【図4】局所WB補正のための撮影手順を説明するタイミングチャートである。
【図5】局所WB補正を説明するための図である。
【図6】局所WB補正の方法を説明するための図である。
【図7】重み付け係数の決定方法を説明するための図である。
【図8】デジタルカメラ1Aにおける基本的な動作を説明するフローチャートである。
【図9】局所γ補正のための撮影手順を説明するタイミングチャートである。
【図10】局所γ補正を説明するための図である。
【図11】局所γ補正の方法を説明するための図である。
【図12】重み付け係数の決定方法を説明するための図である。
【図13】デジタルカメラ1Bにおける基本的な動作を説明するフローチャートである。
【図14】逆光領域の判別を説明するための図である。
【図15】本発明の変形例に係る画像処理システム5の要部構成を示す図である。
【符号の説明】
1A、1B デジタルカメラ
2 CCD
5 画像処理システム
6 情報処理装置
11 フラッシュ
14 レリーズボタン
20 撮影・再生切換えキー
21 局所補正設定キー
23 CPU
28 画像処理部
29 メモリ
31 補正データメモリ
【特許請求の範囲】
【請求項1】
デジタルカメラであって、
(a)被写体に係る撮影画像データを取得する撮影手段と、
(b)フラッシュ発光を指示する発光指示手段と、
(c)前記撮影手段によって、前記被写体に係る前記フラッシュ発光を伴った発光画像を取得する発光撮影手段と、
(d)前記撮影手段によって、前記被写体に係る前記フラッシュ発光を伴わない非発光画像を取得する非発光撮影手段と、
(e)前記発光画像と前記非発光画像とに基づき、前記被写体に関する距離情報を生成する生成手段と、
(f)前記距離情報に応じて、前記撮影画像データに対する画像補正パラメータを決定する決定手段と、
を備えることを特徴とするデジタルカメラ。
【請求項2】
請求項1に記載のデジタルカメラにおいて、
前記画像補正パラメータは、ホワイトバランス補正に係るパラメータであることを特徴とするデジタルカメラ。
【請求項3】
請求項1に記載のデジタルカメラにおいて、
前記画像補正パラメータは、階調補正に係るパラメータであることを特徴とするデジタルカメラ。
【請求項4】
請求項1に記載のデジタルカメラにおいて、
本撮影は、前記フラッシュ発光を伴った撮影であることを特徴とするデジタルカメラ。
【請求項5】
フラッシュ発光を伴って取得された被写体に係る発光画像と、フラッシュ発光を伴わずに取得された前記被写体に係る非発光画像とに対する処理が可能なコンピュータによって実行されることにより、
前記コンピュータに、
(a)前記発光画像と前記非発光画像とに基づき、前記被写体に関する距離情報を生成する生成工程と、
(b)前記距離情報に応じて、前記発光画像および/または前記非発光画像に対する画像補正パラメータを決定する決定工程と、
を実行させることを特徴とする処理プログラム。
【請求項1】
デジタルカメラであって、
(a)被写体に係る撮影画像データを取得する撮影手段と、
(b)フラッシュ発光を指示する発光指示手段と、
(c)前記撮影手段によって、前記被写体に係る前記フラッシュ発光を伴った発光画像を取得する発光撮影手段と、
(d)前記撮影手段によって、前記被写体に係る前記フラッシュ発光を伴わない非発光画像を取得する非発光撮影手段と、
(e)前記発光画像と前記非発光画像とに基づき、前記被写体に関する距離情報を生成する生成手段と、
(f)前記距離情報に応じて、前記撮影画像データに対する画像補正パラメータを決定する決定手段と、
を備えることを特徴とするデジタルカメラ。
【請求項2】
請求項1に記載のデジタルカメラにおいて、
前記画像補正パラメータは、ホワイトバランス補正に係るパラメータであることを特徴とするデジタルカメラ。
【請求項3】
請求項1に記載のデジタルカメラにおいて、
前記画像補正パラメータは、階調補正に係るパラメータであることを特徴とするデジタルカメラ。
【請求項4】
請求項1に記載のデジタルカメラにおいて、
本撮影は、前記フラッシュ発光を伴った撮影であることを特徴とするデジタルカメラ。
【請求項5】
フラッシュ発光を伴って取得された被写体に係る発光画像と、フラッシュ発光を伴わずに取得された前記被写体に係る非発光画像とに対する処理が可能なコンピュータによって実行されることにより、
前記コンピュータに、
(a)前記発光画像と前記非発光画像とに基づき、前記被写体に関する距離情報を生成する生成工程と、
(b)前記距離情報に応じて、前記発光画像および/または前記非発光画像に対する画像補正パラメータを決定する決定工程と、
を実行させることを特徴とする処理プログラム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2004−222052(P2004−222052A)
【公開日】平成16年8月5日(2004.8.5)
【国際特許分類】
【出願番号】特願2003−8265(P2003−8265)
【出願日】平成15年1月16日(2003.1.16)
【出願人】(000006079)ミノルタ株式会社 (155)
【Fターム(参考)】
【公開日】平成16年8月5日(2004.8.5)
【国際特許分類】
【出願日】平成15年1月16日(2003.1.16)
【出願人】(000006079)ミノルタ株式会社 (155)
【Fターム(参考)】
[ Back to top ]