
ナビゲーション装置および地図表示方法
【課題】 誘導経路を設定せずに走行している場合でも、利用者に相当量の操作の負担を強いることなく、これから通過すると予想される地点における交通情報を利用者に提供可能な「ナビゲーション装置および地図表示方法」を提供する。
【解決手段】 あらかじめ定められた推定基準に従って目的地を推定する目的地推定部17と、現在位置から推定目的地に至る複数のルートを探索するルート探索部18と、探索された複数のルート上にある複数の地点を将来の自車位置として推定する自車位置推定部19と、複数の推定自車位置の周辺地図を所定の表示縮尺で表示するように制御する地図表示制御部20とを備え、例えば現在位置から所定時間経過後の自車位置を推定し、推定自車位置を中心とした地図を表示するようにすることで、利用者が走行中に何ら操作をすることなく、これから走行する可能性のある地点を含む地図と交通情報を提供できるようにする。
【解決手段】 あらかじめ定められた推定基準に従って目的地を推定する目的地推定部17と、現在位置から推定目的地に至る複数のルートを探索するルート探索部18と、探索された複数のルート上にある複数の地点を将来の自車位置として推定する自車位置推定部19と、複数の推定自車位置の周辺地図を所定の表示縮尺で表示するように制御する地図表示制御部20とを備え、例えば現在位置から所定時間経過後の自車位置を推定し、推定自車位置を中心とした地図を表示するようにすることで、利用者が走行中に何ら操作をすることなく、これから走行する可能性のある地点を含む地図と交通情報を提供できるようにする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ナビゲーション装置および地図表示方法に関し、特に、渋滞などの交通情報を地図上に表示する機能を有するナビゲーション装置に用いて好適なものである。
【背景技術】
【0002】
一般に、車載用のナビゲーション装置では、自律航法センサやGPS(Global Positioning System)受信機などを用いて車両の現在位置を検出し、その近傍の地図データを記録媒体から読み出して画面上に表示する。そして、画面上の所定箇所に自車位置を示す自車位置マークを重ね合わせて表示することにより、車両の現在位置を一目で分かるようにしている。
【0003】
また、多くのナビゲーション装置は、道路交通情報センタ(VICSセンタ)から送られてくるVICS道路交通情報(以下、VICS情報と略す)を受信して、刻々と変化する道路状況を地図画面上に表示できるようになっている。VICS機能を搭載したナビゲーション装置では、渋滞情報や規制情報といった道路交通情報をリアルタイムにユーザに提供することが可能である。
【0004】
VICS情報は、主に一般道に設置された光ビーコン、主に高速道路上に設置された電波ビーコン、FM放送電波を利用したFM多重放送から取得することが可能である。このVICS情報には、レベル1、レベル2、レベル3の3種類の情報がある。上述のレベル3のVICS情報は、渋滞情報や規制情報を地図画面上の色付き矢印およびアイコンによって知らせるために利用される。
【0005】
すなわち、VICSセンタから送られてくる各リンク(交差点や分岐など複数の道路が交わる点をノード、隣接するノード間を結ぶベクトルをリンクと呼ぶ)の渋滞情報(渋滞/混雑/順調の何れか)に基づいて、各リンクに対応する道路の脇に渋滞箇所(赤の矢印)や混雑箇所(オレンジの矢印)が明滅表示され、空いている道路の脇には青の矢印が表示される。また、VICSセンタから送られてくる規制情報に基づいて、該当する箇所の道路の脇に規制を表すアイコンが表示される。
【0006】
また、ナビゲーション装置の殆どには経路誘導機能が搭載されている。この経路誘導機能では、地図データを用いて現在地から目的地までを結ぶコストが最も小さな経路を自動探索し、その探索した経路を誘導経路として地図画面上で他の道路とは色を変えて太く描画する。また、車両が誘導経路上の案内交差点に一定距離以内に近づいたときに交差点拡大図を表示して交差点案内を行うことにより、運転者を目的地まで案内するようになっている。
【0007】
上述した従来のナビゲーション装置が表示する地図は、自車の現在位置を中心とした周辺の地図である。そのため、現在の画面上に表示されていない、現在位置から少し離れた地点の地図や道路交通情報を見たい場合には、地図をスクロールさせて表示位置を移動したり、表示縮尺を変更して広域を表示したりするなどの操作を行う必要がある。
【0008】
地図をスクロールさせて所望の地点を表示しようとする場合、参照したい地点が現在位置から近ければ、単に地図をスクロールさせるだけで済むことが多い。ところが、参照したい地点が現在位置から非常に遠い場合は、地図の表示縮尺を一旦小さくして広域を表示し、その状態で地図をスクロールさせることにより、参照したい地点を画面の略中央に表示した後、表示縮尺を元に戻すといった操作が必要になる。このため、利用者に相当量の操作の負担を強いてしまうという問題があった。
【0009】
また、ナビゲーション装置が表示する道路には、高速道路や国道のような主要道路から、市道や私道のような一般道路・細街路まで、様々なものがある。ところが、一般的にナビゲーション装置が有する表示画面のサイズは小さく、画面上に表示できる情報量が限られているため、全ての表示縮尺で全ての道路を表示することはできない。そのため、地図の表示縮尺に合わせて道路を選択的に表示することで、画面上の情報過多を防いでいる。例えば、表示縮尺が大きい地図(狭い範囲の地図)を表示する場合は市道や私道などの細街路等も表示し、表示縮尺が小さい地図(広い範囲の地図)を表示する場合は、細街路等は表示せずに高速道路や国道のみを表示する。
【0010】
従来のナビゲーション装置は上述したように構成されているため、現在位置から少し離れた地点を表示するために表示縮尺を小さくすると、市道や私道などの一般道路を見ることができなくなってしまうという問題があった。市道や私道などが表示されないと、その道路に関する交通情報も表示されなくなってしまうため、交通情報を見るためには、上述したように、表示縮尺を小さくした地図をスクロールさせて所望の地点を画面の略中央に配置した後、表示縮尺を元に戻すといった操作が必要になる。
【0011】
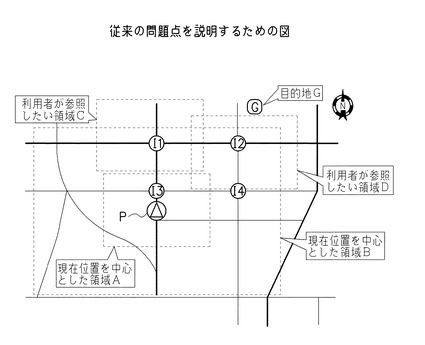
図8は、上述した従来の問題点を例示して説明するための図である。図8において、破線の矩形A〜Dはある縮尺の地図の表示範囲であり、実線は道路を示す。太い実線は小さな縮尺でも表示される国道・県道といった主要道路を示し、細い実線は小さな縮尺でしか表示されない市道・私道といった一般道路を示している。矩形の領域A,C,Dは一般道路が表示される大きい縮尺の地図の表示領域であり、領域Bは主要道路しか表示されない小さい縮尺の地図の表示領域である。
【0012】
例えば、図8に示したように利用者が現在位置Pから目的地Gに向かって移動している場合、利用者は次の2つのルートの何れかを選択することができる。
(1)交差点I3を直進後、交差点I1を右折して目的地Gに向かうルート
(2)交差点I3を右折後、交差点I4を左折して目的地Gに向かうルート
この場合に、交差点I1、交差点I2、交差点I4の付近における道路の混雑度合いを事前に参照することができれば、渋滞や混雑を避けたルートを選択することが可能となる。
【0013】
さて、利用者が現在位置P周辺の地図を大きい縮尺で表示している場合(表示領域A)、表示縮尺を小さい縮尺に変更することで、交差点I1,I2,I4を地図上に表示することができる(表示領域B)。しかし、小さい表示縮尺では、交差点I2を南北方向に横切る一般道路(交差点I2,I4を通過する道路)や、交差点I4を東西方向に横切る一般道路(交差点I3,I4を通過する道路)が表示されない。そのため交差点I2を横切る一般道路を表示するためには、利用者は、所望の交差点(例えば、交差点I2)が地図の中心になるように地図をスクロールさせた後、大きい表示縮尺に変更する必要がある(表示領域D)。
【0014】
なお、交差点I1は主要道路どうしが交わる交差点なので、表示縮尺が小さい場合でも表示される。よって、この交差点I1の道路状況は、小さい表示縮尺に変更して表示領域Bの広域地図を表示するだけで、その後のスクロールや表示縮尺の変更といった面倒な手順を踏まなくとも確認可能である。ところが、小さい縮尺で表示した地図は広い領域を一度に表示しているため、画面上に表示される渋滞・混雑に関する複数の矢印の位置が近くなったり重なったりしてしまい、見辛くなる。
【0015】
さらに、利用者が行きたいと考えている目的地が複数存在する場合、上述した道路状況の確認作業は更に煩雑となる。例えば、複数の店舗を移動して買い物をするような場合、利用者は効率的な移動の順序を決定したいので、現在位置から各店舗・各店舗間の道路状況を確認することとなる。しかし、このような作業は煩雑であるので、多くの利用者はナビゲーション装置を使用せずに、生活圏での経験に基づき目的地に向かう順序を決定している。
【0016】
生活圏内を移動する利用者は、目的地に行くために走行する道路の混雑状況を確認したり、位置を詳細に確認したりするために地図を参照する。しかし、上述したように、従来のナビゲーション装置を利用して自車が走行する予定の道路の状況を確認する作業は多くの煩雑な操作を必要とし、走行中の操作は安全運転の妨げになってしまうという問題があった。
【0017】
なお、経路誘導機能を利用して探索した誘導経路上に渋滞がある場合に、渋滞している地点まで地図をスクロールしたり、渋滞している地点が見えるように表示縮尺を変更したりする技術が提案されている(例えば、特許文献1参照)。
【特許文献1】特開平11−2538号公報
【発明の開示】
【発明が解決しようとする課題】
【0018】
しかしながら、上記特許文献1に記載の技術は、誘導経路を設定していることが前提の技術であり、利用者が生活圏内を移動するときのように誘導経路を設定していない場合には利用することはできない。すなわち、特許文献1は、地図を自動的にスクロールして誘導経路上にある渋滞地点の情報を利用者に提供するだけであり、利用者が希望するであろう複数の地点の交通情報を提供することはできない。このため利用者は、誘導経路を設定せずに走行しているときに、自車が通るルートを決定するために有用な情報を得ることができない。
【0019】
また、広域にわたって誘導経路上の渋滞している地点が見えるように地図の表示縮尺を小さくした場合には、渋滞地点以外の地点も地図上に一緒に表示される。しかしながら、上述したように、小さい表示縮尺では主要道路が表示されるのみで、一般道路は表示されない。そのため、利用者が希望する地点の道路交通情報は表示されないことが多い。
【0020】
本発明は、このような問題を解決するために成されたものであり、例えば利用者が自身の生活圏内で誘導経路を設定せずに走行している場合でも、利用者に相当量の操作の負担を強いることなく、これから通過すると予想される地点における道路交通情報を利用者に提供できるようにすることを目的とする。
【課題を解決するための手段】
【0021】
上述した課題を解決するために、本発明のナビゲーション装置では、あらかじめ定められた推定基準に従って、1つまたは複数の目的地を推定する目的地推定手段と、現在位置から1つまたは複数の推定目的地に至る複数のルートを探索するルート探索手段と、探索された複数のルート上にある複数の地点を将来の自車位置として推定する自車位置推定手段と、複数の推定自車位置の周辺地図を所定の表示縮尺で表示するように制御する表示制御手段とを備えている。
【発明の効果】
【0022】
上記のように構成した本発明によれば、利用者が地図をスクロールさせたり表示縮尺を小さくしたりする操作を行わなくても、これから走行する可能性のある複数の地点が自動的に推定されてその推定自車位置の周辺地図が表示されることとなる。これにより、例えば利用者の生活圏内で誘導経路を設定せずに走行している場合でも、現在位置から少し離れた地点における道路交通情報を利用者に提供することができるようになる。
【0023】
したがって、利用者は、誘導経路を設定せずに走行しているときでも、煩雑な操作を行うことなく、最適な走行ルートを決定するのに有用な情報を得ることができる。例えば、渋滞・混雑している地点を、その地点を通過する前に知ることが可能になり、渋滞や混雑を容易に回避することができる。また、地図に表示された渋滞・混雑の状態から目的地を変更したり、目的地に向かう順序を変更したりすることもできる。
【発明を実施するための最良の形態】
【0024】
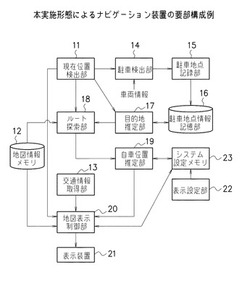
以下、本発明の一実施形態を図面に基づいて説明する。図1は、本実施形態によるナビゲーション装置の要部構成例を示すブロック図である。図1において、11は車両の現在位置を検出する現在位置検出部であり、自律航法センサ、GPS受信機、位置計算用CPU等で構成されている。自律航法センサは、所定走行距離毎に1個のパルスを出力して車両の移動距離を検出する車速センサ(距離センサ)と、車両の回転角度(移動方位)を検出する振動ジャイロ等の角速度センサ(相対方位センサ)とを含む。自律航法センサは、これらの車速センサおよび角速度センサによって車両の相対位置および方位を検出する。
【0025】
位置計算用CPUは、自律航法センサから出力される自車の相対的な位置および方位のデータに基づいて、絶対的な自車位置(推定車両位置)および車両方位を計算する。また、GPS受信機は、複数のGPS衛星から送られてくる電波をGPSアンテナで受信して、3次元測位処理あるいは2次元測位処理を行って車両の絶対位置および方位を計算する(車両方位は、現時点における自車位置と1サンプリング時間ΔT前の自車位置とに基づいて計算する)。
【0026】
12は地図情報メモリであり、地図表示やルート探索などに必要な各種の地図データを記憶している。この地図情報メモリ12に格納されている地図データは、例えば、現在位置検出部11によって検出された車両現在位置を含む所定範囲の地図データであり、例えばDVD−ROMやCD−ROM、ハードディスクなどの記録媒体(図示せず)から読み出されたものである。
【0027】
ここで、地図情報メモリ12に格納されている地図データの詳細を説明する。地図情報メモリ12に格納された地図データは、広い地域を一望するための上位レベルの地図から、狭い地域を詳細に記述した下位レベルの地図まで、レベルと呼ばれる単位に階層化して管理されている。各レベルの地図は、所定の経度および緯度で区切られた区画(メッシュやパーセルと言うこともある)と呼ばれる矩形領域を単位として分割されている。
【0028】
区画ごとの地図データには、地図表示に必要な各種のデータから成る描画ユニットと、マップマッチングや経路案内等の各種の処理に必要なデータから成る道路ユニットと、交差点の詳細データから成る交差点ユニットとが含まれている。また、上述した描画ユニットには、建物あるいは河川等を表示するために必要な背景レイヤのデータや、市町村名や道路名等を表示するために必要な文字レイヤのデータ等が含まれている。
【0029】
上述の道路ユニットは、交差点や分岐など、複数の道路が交わる点に対応するノードに関する情報と、道路上のあるノードとこれに隣接する他のノードとの間を接続する、道路や車線等に対応するリンクに関する情報とを含んでいる。すなわち、道路ユニットには、全ノードの詳細データを納めた接続ノードテーブルと、隣接する2つのノードによって特定されるリンクの詳細データを納めたリンクテーブルとが含まれている。
【0030】
接続ノードテーブルには、存在するノードのそれぞれ毎に、ノードの正規化経度・緯度、属性フラグ、交通規制の数、交通規制レコード等の情報が含まれている。正規化経度・緯度は、区画を基準とした経度方向・緯度方向の相対位置を示す。属性フラグは、そのノードが交差点ノードであることを示す交差点ノードフラグや、他の区画との境界にあるノードであることを示す隣接ノードフラグなどから成る。交通規制の数は、そのノードに接続されているリンクに右折禁止やUターン禁止等の交通規制が存在する場合に、その交通規制の数を示す。交通規制レコードは、上述した交通規制が存在する場合にはその数に対応した交通規制の具体的な内容を示す。
【0031】
また、リンクテーブルは、各区画に含まれる全てのリンクに対応したリンクレコードを格納している。各リンクレコードには、リンクの距離、リンクのコスト、道路属性フラグ、道路種別フラグ等の情報が含まれている。リンクの距離は、当該リンクに対応した実際の道路の実距離を示す。リンクのコストは、リンクの距離をもとに、道路幅員、道路種別(一般道か高速道路かなど)、法定速度、右折および左折、交通規制などに応じた所定の定数を乗じた値であり、誘導経路として適正の程度を数値化したものである。
【0032】
道路属性フラグは、そのリンクに関する各種の属性を示す。例えば、そのリンクがVICSセンタで管理しているVICSリンク(VICS情報を受信可能なリンク)と対応していることを示すVICSリンク対応フラグを含んでいる。道路種別フラグは、そのリンクに対応した実際の道路が属する道路区分のランクを示す。
【0033】
例えば、日本の道路区分では、上位ランクから順に(1)高速自動車国道、(2)都市高速道路、(3)一般国道、(4)主要地方道、(5)主要地方道(指定市道)、(6)一般都道府県道、(7)主要一般道、(8)一般道、(9)細道路、(10)フェリー航路(経路)、(11)カートレイン、(12)その他、のように区分されている。本実施形態では、このうち例えば(8)一般道以上のランクの道路を、後述する推定自車位置の周辺地図における表示対象道路とする。言い換えると、推定自車位置の周辺地図を、(8)一般道以上のランクの道路が表示される表示縮尺で表示するものとする。なお、(8)一般道以上というのは単なる一例に過ぎず、これに限定されるものではない。
【0034】
13は交通情報取得部であり、主に高速道路上に設置された電波ビーコン送受信機との間で電波を介して双方向通信を行うとともに、主に一般道路上に設置された光ビーコン送受信機との間で光を介して双方向通信を行うことにより、図示しないVICSセンタから送られてくるVICS情報(渋滞情報や規制情報を含む)を取得する。また、交通情報取得部13は、FM多重放送からもVICS情報を取得する。
【0035】
このVICS情報に含まれる渋滞情報は、あるVICSリンクの特定箇所がどの程度渋滞しているかを示すものであり、VICSリンク番号、開始点からの距離、長さ、渋滞の度合い等の各種情報を含んでいる。VICSリンク番号は、その道路に対応したリンク番号を示す。開始点からの距離は、渋滞等の始点(VICSリンクの一方端)からの距離を示す。長さは、渋滞等の区間を示す。渋滞の度合いは、例えば車両が一定の速度以下になる「混雑」と、ほとんど車両が動かなくなる「渋滞」との2種類の状態を特定する。
【0036】
14は駐車検出部であり、自車が駐車場などの施設に駐車したことを検出する。例えば、駐車検出部14は、図示しないスピードセンサやサイドブレーキの圧力センサ、アクセサリー電源等の状態を車両情報として入力するとともに、現在位置検出部11から車両の現在位置情報を入力する。そして、車両が施設内で停車してサイドブレーキが引かれたことを検出した後に、エンジンの再始動を検出したときに、現在停車している地点を駐車地点として検出する。
【0037】
15は駐車地点記録部であり、駐車検出部14により検出された駐車地点に関する情報を駐車地点情報記憶部16に記録する。駐車地点情報記憶部16に記憶される駐車地点情報には、例えば、駐車地点を表す位置、駐車した回数などの情報が含まれる。駐車地点情報記憶部16は、例えばハードディスクにより構成されるが、これに限定されるものではない。不揮発性の記録媒体であれば、ハードディスク以外の媒体を用いても良い。
【0038】
17は目的地推定部であり、あらかじめ定められた推定基準に従って、利用者が向かっていると考えられる地点(目的地)を複数推定する。この目的地の推定のために、駐車地点情報記憶部16に記憶されている駐車地点情報を利用する。例えば、駐車地点情報として記憶されている複数の駐車地点の中から、現在位置検出部11により検出された現在位置からの距離Rが第1の距離R1以上で第2の距離R2(R2>R1)以下の位置に存在する駐車地点で、かつ、駐車回数の多い地点を推定目的地として抽出する。ここで、駐車回数の多い地点から順番に所定数の駐車地点を抽出するようにしても良いし、駐車回数が所定回より多い駐車地点を全て抽出するようにしても良い。
【0039】
また、駐車地点情報として駐車開始時刻を記憶するようにし、以下のように目的地を推定するようにしても良い。すなわち、駐車地点情報として記憶されている各駐車地点に到着するまでの到着予想時刻をそれぞれ算出し、その到着予想時刻と各駐車地点の駐車開始時刻との差が小さい地点で、かつ、R1<R<R2の条件を満たす地点を推定目的地として抽出する。ここで、到着予想時刻と駐車開始時刻との差が小さい地点から順番に所定数の駐車地点を抽出するようにしても良いし、当該差が所定値より小さい駐車地点を全て抽出するようにしても良い。
【0040】
なお、到着予想時刻は、現在位置検出部11により検出された現在位置から各駐車地点に至るルート上にある各道路リンクの距離と、道路種別毎にあらかじめ設定された走行速度とを用いた演算によって算出する。道路種別に応じた走行速度は、利用者が指定することも可能である。例えば、高速道路は1km/分(60km/h)、一般道路は500m/分(30km/h)で走行するとナビゲーション装置に設定されている場合、高速道路10kmと一般道路3kmとを走行するルートの到着予想時刻は、高速道路を走行する時間10分と一般道路を走行する時間6分との合計16分の所要時間が現在時刻から経過した後の時刻となる。到着予想時刻の精度を上げるために、リンクの距離と道路種別毎に設定された走行速度とから得られる所要時間に加えて、VICS情報より取得できる区間旅行時間や右左折にかかる時間を加味して到着予想時刻を算出しても良い。
【0041】
また、各駐車地点に駐車したときの自車の出発時刻を駐車地点情報として記憶するようにし、以下のように目的地を推定するようにしても良い。すなわち、車両が走行を開始した時刻と、駐車地点情報として記憶されている出発時刻との差が小さい地点で、かつ、R1<R<R2の条件を満たす地点を推定目的地として抽出する。ここで、実際の出発時刻と駐車地点情報の出発時刻との差が小さい地点から順番に所定数の駐車地点を抽出するようにしても良いし、当該差が所定値より小さい駐車地点を全て抽出するようにしても良い。
【0042】
なお、ここでは目的地を推定するために、駐車検出部14、駐車地点記録部15および駐車地点情報記憶部16を設けているが、この例に限定されない。例えば、駐車地点情報の代わりに走行履歴情報を記憶するようにし、この走行履歴情報から目的地を推定することも可能である。例えば、右左折した交差点や、よく通る道路上に存在する一地点などを走行履歴情報として記憶するようにし、この記憶されている複数地点のうち、R1<R<R2の条件を満たす地点を推定目的地として抽出することが可能である。
【0043】
目的地推定部17は、現在位置検出部11によって自車位置の移動を検出するたびに上述した目的地の推定処理を実行し、現在位置を基準とした目的地を随時推定する。例えば、R1<R<R2の条件を満たす地点を推定目的地として一旦設定しても、その推定目的地に車両が近づいていくと、R1<Rの条件を満たさなくなり、その地点は推定目的地から外される。一方、当初はR<R2の条件を満たさずに推定目的地に設定されていなかった地点も、その地点に車両が近づいていくとR1<R<R2の条件を満たすようになり、その地点が新たに推定目的地として設定されることとなる。
【0044】
18はルート探索部であり、現在位置検出部11により検出された現在位置から目的地推定部17により推定された複数の目的地に至る複数のルートを探索する。すなわち、現在位置と推定目的地との間を結ぶルートを、複数の推定目的地毎に1本ずつ探索する。具体的には、地図情報メモリ12に格納されている地図データを用いて、それぞれの推定目的地毎に、現在位置から推定目的地までを結ぶ最もコストが小さな経路を探索し、その探索した経路を各推定目的地に対するルートとして設定する。このときルート探索部18は、渋滞や工事などに関するコストの重み付けはせずにルート探索を実行する。
【0045】
ルート探索は、幅優先探索(BFS)法あるいはダイクストラ法などのシミュレーションにより実行する。このときの探索条件は、時間最短、距離最短、料金最小等の各種条件のうちナビゲーション装置によってあらかじめ設定されている条件を使用する。この探索条件は、利用者が指定することも可能である。同じルートであっても、どの探索条件で探索するかによって、コストは異なったものとなる。なお、探索条件の種類は上述のものに限られない。例えば、通過信号数最小、右折数最小、左折数最小、道路幅最大、交通量最小等の条件でルート探索を行っても良い。
【0046】
19は自車位置推定部であり、ルート探索部18により探索された複数のルート上にある複数の地点を、将来の自車位置として推定する。例えば、自車位置推定部19は、複数のルート上において現在位置から所定時間(以下、推定対象時間と言う)の経過後に車両が居ると予想される複数の地点を推定自車位置として求める。この推定対象時間は、例えば、ナビゲーション装置によりあらかじめ設定されている。
【0047】
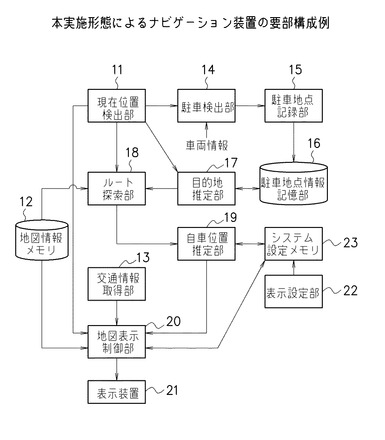
推定対象時間の経過後における推定自車位置は、ルート探索部18により算出されたルートを構成している道路リンクの走行時間を累算し、累算した走行時間と推定対象時間とが等しくなる地点を求めることによって算出する。図2は、自車位置推定部19によって行われる推定自車位置の算出処理を説明するための図である。図2において、Ln(n=1,2,・・・,6)はそれぞれルート上の道路リンクを示し、tn(n=1,2,・・・,6)はそれぞれの道路リンクの走行時間を示している。自車は、道路リンクL1の開始地点に存在する。
【0048】
上述のように、道路リンクは道路属性フラグによって高速道路・国道・県道・一般道などの属性を持っている。自車位置推定部19は、ナビゲーション装置や利用者によってこれらの道路種別毎に設定された走行速度に基づいて、それぞれの道路リンクの走行時間を算出する。すなわち、道路リンクの長さを走行速度で割ることにより、当該道路リンクの走行時間を算出できる。
【0049】
例えば、高速道路では1分間に1km走行でき、一般道では1分間に300m走行できると定義されている場合、仮に道路リンクL1が一般道で3kmの道路リンクであるとした場合、走行時間t1は10分となる。また、道路リンクL2の走行時間が10分、道路リンクL3の走行時間が20分であると仮定した場合、推定対象時間30分を経過した後の自車位置は、道路リンクL3の中間地点にあると推定できる。
【0050】
また、ルート上に渋滞がある場合は、渋滞が発生している道路リンクの走行時間に対して、渋滞が発生していることを表した係数を掛けたり、渋滞の長さを考慮した追加時間を加えたりするなどして、推定対象時間経過後の自車位置を推定する。自車位置推定部19は、現在位置検出部11によって自車位置の移動を検出するたびに上述した自車位置の推定処理を実行し、現在位置を基準とした将来の自車位置を随時推定する。
【0051】
20は地図表示制御部であり、地図情報メモリ12に格納された地図データに基づいて、表示装置21に対する自車位置周辺の地図の表示を制御する。このとき地図表示制御部20は、地図データに基づき地図画像データを生成するとともに、交通情報取得部13により取得されるVICS情報に基づき道路状況を表す矢印画像データを生成する。そして、各リンクに対応する道路の脇に渋滞箇所(赤の矢印)や混雑箇所(オレンジの矢印)を明滅表示し、空いている道路の脇には青の矢印を表示する。また、規制の存在する道路の脇に規制を表すアイコンを表示する。
【0052】
また、地図表示制御部20は、本発明の表示制御手段に相当し、自車位置推定部19により推定された複数の推定自車位置の周辺地図を所定の表示縮尺で表示するように制御する。所定の表示縮尺とは、例えば、道路種別で一般道以上にランクされた道路が表示される縮尺であり、ナビゲーション装置によりあらかじめ設定されている。この推定自車位置の周辺地図上にも、渋滞・混雑などを表す矢印画像や、規制を表すアイコンなどを表示する。
【0053】
推定自車位置の周辺地図は、道路(およびその名称)と、道路の渋滞・混雑・規制などを表す交通情報といった、道路に係わる情報のみを表示するのが好ましい。すなわち、道路に関わらない情報は利用者にとって不要であると考えられるので、この種の情報を地図上に極力表示しないようにすることで、利用者が極力短い時間で必要な情報を取得できるようにする。
【0054】
22は表示設定部であり、推定自車位置を求める際の推定対象時間や、推定自車位置の周辺地図を表示する際の表示縮尺を利用者がシステム設定メモリ23に設定するためのものである。この表示設定部22は、例えばリモートコントローラや表示装置21のタッチパネルなどを備えて構成されている。利用者は、この表示設定部22を用いて、推定対象時間や表示縮尺を好みの値に設定することが可能である。表示設定部22およびシステム設定メモリ23により、本発明の所定時間設定手段および表示縮尺設定手段が構成される。
【0055】
なお、システム設定メモリ23に推定対象時間や表示縮尺が設定されているときは、ナビゲーション装置によってあらかじめ設定されているものよりも優先して使用する。または、利用者による設定情報とナビゲーション装置によるデフォルトの設定情報との何れかを利用者が選択(選択情報)できるようにしても良い。当該選択情報も、システム設定メモリ23に格納される。自車位置推定部19および地図表示制御部20は、システム設定メモリ23に推定対象時間や表示縮尺の情報が格納されていて、かつ、それが「有効」に設定されているときは、この格納情報に従って処理を実行する。
【0056】
推定対象時間の設定に関しては、例えば10分後という情報を1つ設定することが可能である。また、10分後、20分後、30分後のように複数の推定対象時間を設定するようにしても良い。この場合、地図表示制御部20は、10分後、20分後、30分後の推定自車位置を中心とした地図を一画面上に同時に表示しても良いが、表示が煩雑になるので、例えば1分毎といったように一定時間毎に切り替えて表示してもよい。
【0057】
このように、複数の推定対象時間を設定し、それぞれの推定対象時間後における推定自車位置周辺の地図を表示することによって、1つのルート上にある複数の推定自車位置に関する渋滞や混雑などの交通情報を、実際にその地点を通過する前に表示装置21に表示し、利用者に提供することができる。
【0058】
表示縮尺の設定に関しては、次の2通りの設定方法が考えられる。1つ目は、道路種別で一般道以上にランクされた道路が表示されるように、所定値より大きい縮尺に限定して利用者に選択させる方法である。例えば、所定値より大きい表示縮尺のみを画面上にリスト表示して利用者に選択させるようにすることで、所定値より小さい表示縮尺は選択できないようにする。または、選択自体は自由にできるが、所定値より小さい表示縮尺が選択されたときに警告メッセージを出して再選択を促すようにしても良い。
【0059】
2つ目の方法は、表示縮尺の設定は全く利用者の自由に任せる方法である。ただし、所定値より小さい表示縮尺が設定されてしまうと、推定自車位置の周辺地図が広域で表示されることとなるので、市道や私道などが交わる交差点に関する交通情報(渋滞や混雑を表す矢印表示など)が表示されなくなってしまう。そこで、この場合に地図表示制御部20は、表示設定部22により設定された表示縮尺が所定値より大きいときは、その表示縮尺を採用して推定自車位置の周辺地図を表示する。一方、表示設定部22により設定された表示縮尺が所定値以下のときは、所定値以上でナビゲーション装置によってあらかじめ定められた表示縮尺を採用して推定自車位置の周辺地図を表示するように制御する。
【0060】
次に、上記のように構成した本実施形態によるナビゲーション装置の動作を説明する。図3〜図5は、本実施形態によるナビゲーション装置の動作を具体例に沿って説明するための図である。このうち図3は、あるタイミングにおける自車位置VA、推定目的地G1〜G3、推定自車位置A1〜A3の状況を示す図である。図4は、図3の状況下で表示装置21に表示される画面の一例を示す図である。図5は、図3の状態から一定時間を経過したタイミングにおける自車位置VB、推定目的地G1〜G3、推定自車位置B1〜B3の状況を示す図である。
【0061】
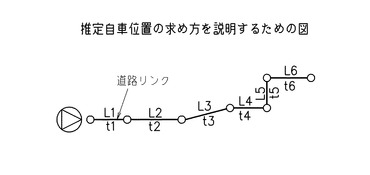
図3に示す例では、現在位置検出部11により検出された現在位置VAと、駐車地点情報記憶部16に格納されている駐車地点情報とに基づいて、目的地推定部17が現在位置VAからの距離Rが第1の距離R1以上で第2の距離R2以下の位置に存在する3つの地点G1〜G3を推定目的地として抽出している。
【0062】
このときルート探索部18は、現在位置VAから推定目的地G1〜G3までを結ぶ各1本(合計3本)のルートRA1〜RA3を探索する。なお、波線(のこぎり線)は道路上の渋滞を示す。上述したように、ルート探索部18は渋滞を考慮せずにコスト最小のルートを探索するので、ルートRA1とルートRA3は渋滞を通過するルートとなっている。
【0063】
自車位置推定部19は、3つのルートRA1〜RA3上にある地点で、現在位置VAから推定対象時間の経過後に自車が居るであろう複数の地点A1〜A3を推定自車位置として求める。地図表示制御部20は、3つの推定自車位置A1〜A3を中心とした周辺地図をそれぞれ所定の表示縮尺で表示装置21に表示するように制御する。破線の矩形で示した領域DA1〜DA3が、推定自車位置A1〜A3を含む表示地図の領域を示す。
【0064】
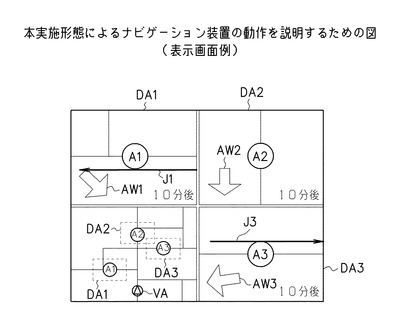
実際に表示装置21に表示される画像の例が、図4に示されている。図4において、左上の画像は推定自車位置A1を中心とした表示領域DA1の地図、右上の画像は推定自車位置A2を中心とした表示領域DA2の地図、右下の画像は推定自車位置A3を中心とした表示領域DA3の地図をそれぞれ示している。また、左下の画像は、現在位置VAと3つの表示領域DA1〜DA3とを含む広域の地図を示している。このように、図4の例では、一画面を4つに分割して、それぞれの分割領域に異なる領域の地図を表示するようにしている。
【0065】
なお、推定自車位置A1,A3を中心とした地図に含まれる黒色の矢印J1,J3は、渋滞や混雑の区間を表す矢印表示である。また、推定自車位置A1〜A3を中心とした地図に含まれる白抜きの矢印AW1〜AW3は、自車の現在位置VAの方向を示す。
【0066】
仮に、利用者が推定目的地G1に向かっているとした場合、利用者は図3に示した道路X,Y,Zの何れかを利用して目的地G1に向かうことが可能である。この場合に利用者は、表示装置21に図4のように表示された推定自車位置A1周辺の地図と、推定自車位置A2周辺の地図とを参照し、利用者の要求に適した道路を走行して目的地G1に向かうことが可能となる。例えば、利用者が早く目的地G1に到着したいと考えている場合、推定自車位置A1周辺の地図と推定自車位置A2周辺の地図とを比較し、混雑していない道路、すなわち、推定自車位置A2付近を走行して目的地G1に向かうことができるようになる。
【0067】
なお、図4に示す画面例において、左下に示す現在位置VA周辺の広域地図は必須の表示ではないが、現在位置VA周辺の広域地図を表示することによって、自車の現在位置VAと推定自車位置A1〜A3との位置関係が明確になるので好ましい。現在位置VA周辺を表示した地図において、推定自車位置A1〜A3周辺の地図の表示領域DA1〜DA3を示すことによって、それぞれの地図の位置をより明確に表すことができる。現在位置VAと推定自車位置A1〜A3との位置関係を更に明確にするために、左下の画像中に現在位置VAと推定自車位置A1〜A3との距離を表示してもよい。また、左下の画像中に推定目的地G1〜G3の方向を表示しても良い。
【0068】
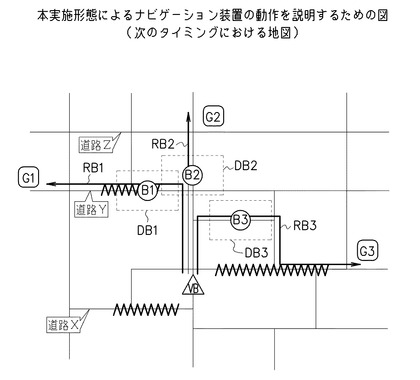
図3のような状態から一定時間が経過すると、図5のように自車の現在位置がVAからVBに進む。このとき目的地推定部17は、現在位置検出部11により検出された現在位置VBと、駐車地点情報記憶部16に格納されている駐車地点情報とに基づいて目的地を推定した結果、現在位置VBからの距離Rが第1の距離R1以上で第2の距離R2以下の位置に存在する3つの地点G1〜G3を推定目的地として抽出している。推定目的地G1〜G3は、図3のタイミングから変わっていない。
【0069】
ただし、ルート探索部18が現在位置VBから推定目的地G1〜G3までを結ぶルートを探索した結果、ルートRB1〜RB3が得られている。ルートRB2は直前のルートRA2と同じであるが、ルートRA1とルートRB1、ルートRA3とルートRB3はそれぞれ異なったものとなっている。なお、ルートRB3は、現在位置VBから直近の交差点が右左折するには近すぎるため、これを直進するルートが探索されている。
【0070】
自車位置推定部19は、3つのルートRB1〜RB3上にある地点で、現在位置VBから推定対象時間の経過後に自車が居るであろう複数の地点B1〜B3を推定自車位置として求める。地図表示制御部20は、3つの推定自車位置B1〜B3を中心とした周辺地図をそれぞれ所定の表示縮尺で表示装置21に表示するように制御する。破線の矩形で示した領域DB1〜DB3が、推定自車位置B1〜B3を含む表示地図の領域を示す。このように、自車の移動に伴い現在位置がVAからVBに変化することによって、推定自車位置もA1〜A3からB1〜B3に変化し、表示領域がDA1〜DA3からDB1〜DB3に変わっている。
【0071】
自車の現在位置がVBであるときに、表示装置21には図4と同様の形式で推定自車位置B1〜B3周辺の地図と、自車の現在位置VB周辺の広域地図とが表示される(図示を省略)。利用者の目的地は元々地点G1であったが、表示装置21に表示された地図を見ることによって、推定目的地G1に向かう途中の推定自車位置B1付近の道路が非常に混雑し、推定目的地G2に向かう途中の推定自車位置B2付近の道路が混雑していないことが分かる。そこで利用者は、推定目的地G2に立ち寄って別の所用を済ませてから推定目的地G1に向かう、あるいは、道路Zを通って推定目的地G1に向かうなど、地図から得た情報に基づいて走行する道路や施設などへの立ち寄り順序を自由に決定することができるようになる。
【0072】
図5のような状態からまた一定時間が経過すると、自車の現在位置がVBから更に先に進む。例えば、利用者が推定目的地G2に向かったとすると、自車位置と推定目的地G2との距離が小さくなっていく。そうすると、推定目的地G2はいずれR1<R<R2の条件を満たさなくなるので、推定目的地としては成り立たなくなり、そこへ向かうルート上における推定自車位置付近の地図は画面上から消えることになる(例えば、図4のように4分割された画面で右上の地図が消えた状態)。しかし、この状況で推定目的地G2までの距離は僅かであり、利用者は生活圏内を走行しているので、道に迷うことなく推定目的地に辿り着くことができる。
【0073】
一方、自車位置が変化した結果として、当初はR<R2の条件を満たさずに推定目的地に設定されなかった地点も、その地点に車両が近づいていくことによってR1<R<R2の条件を満たすようになり、その地点が新たに推定目的地として設定されることもある。この場合には、その新たな推定目的地に対して引かれたルート上にある推定自車位置の周辺の地図が、新たに画面上に表示されることになる。
【0074】
このように、推定自車位置の数は常に一定ではなく、変化することがある。そこで、地図表示制御部20は、推定自車位置の数に応じて表示装置21の画面分割数を決定するようにしても良い。例えば、推定自車位置の数が1個の場合は画面を2分割し、その推定自車位置周辺の地図と現在位置周辺の地図とを表示するようにする。また、推定自車位置の数が2〜3個の場合は画面を4分割して、推定自車位置周辺の地図と現在位置周辺の地図とを表示するようにする(推定自車位置が2個の場合は、1つの分割画面は非表示)。
【0075】
また、推定自車位置の数が4〜15個の場合は画面を16分割し、推定自車位置周辺の地図と現在位置周辺の地図とを表示するようにする(推定自車位置が4〜14個の場合は、非表示の分割画面が存在する)。なお、16分割では1つの画面が小さくなり過ぎるので、画面分割数は2分割または4分割としておき、例えば1分毎といったように一定時間毎に切り替えて表示するようにしてもよい。また、推定目的地を設定するときに、その数が多くなり過ぎないように制限を設けておけば、そもそも画面分割数を多くする必要はなくなる。
【0076】
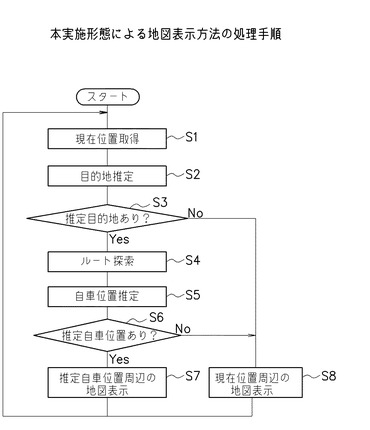
図6は、本実施形態のナビゲーション装置による動作の手順、すなわち、本実施形態による地図表示方法の処理手順を示すフローチャートである。図6において、まず、現在位置検出部11によって車両の現在位置を検出する(ステップS1)。次に、目的地推定部17により、あらかじめ定められた推定基準に従って複数の目的地を推定する(ステップS2)。
【0077】
ここで、目的地推定部17は、推定目的地となるための条件を満たす地点の有無を判定する(ステップS3)。推定目的地となり得る地点が1つも存在しなかった場合には、その旨を地図表示制御部20に通知し、ステップS1で検出された現在位置周辺の地図のみを表示装置21に表示するようにする(ステップS8)。
【0078】
一方、推定目的地となり得る地点が1つ以上存在した場合には、ルート探索部18によって、ステップS1で検出された現在位置からステップS2で抽出された推定目的地に至るルートをそれぞれ探索する(ステップS4)。そして、自車位置推定部19によって、ステップS4で探索されたルート上にある地点を将来の自車位置として推定する(ステップS5)。推定目的地が複数ある場合は、原則として、それぞれの推定目的地に対して引かれたルート上に1つずつ推定自車位置が求められる。
【0079】
ただし、現在位置から探索ルートに沿って推定対象時間経過後の地点を求めようとすると、探索ルートの最終地点である推定目的地を通り越してしまうことがある。この場合には、推定自車位置を求めることができない。そこで、自車位置推定部19は、推定自車位置の有無を判定する(ステップS6)。推定自車位置が1つも求められなかった場合には、その旨を地図表示制御部20に通知し、ステップS1で検出された現在位置周辺の地図のみを表示装置21に表示するようにする(ステップS8)。
【0080】
一方、推定自車位置が1つ以上求められた場合には、その旨を地図表示制御部20に通知する。地図表示制御部20は、求められた推定自車位置の周辺の地図を所定の表示縮尺で表示装置21に表示するようにする(ステップS7)。例えば、推定自車位置が3つ存在する場合には、図4に示したように一画面を4つに分割して、それぞれの分割領域に推定自車位置周辺の詳細地図と自車位置周辺の広域地図とを表示する。
【0081】
ステップS7またはステップS8の処理が終わったら、ステップS1に戻り、以上の処理を繰り返し実行する。
【0082】
以上詳しく説明したように、本実施形態によれば、あらかじめ定められた推定基準に従って目的地を推定し、現在位置から推定目的地に至るルート上にある地点を将来の自車位置として推定して、推定自車位置の周辺地図を所定の表示縮尺で表示するようにしている。これにより、利用者は走行中に何ら操作をすることなく、これから走行する可能性のある地点を含む地図(交通情報を含む)を参照することができるようになる。なお、表示設定部22を用いて推定対象時間や表示縮尺を利用者が設定する場合には、そのための操作が若干必要になるが、この操作も走行中には全く不要である。上述したように、走行中の操作が不要なので、より安全な運転が可能となる。
【0083】
したがって、利用者は、誘導経路を設定せずに走行しているときでも、煩雑な操作を行うことなく、目的地へ行くのに都合の良いルートを選択するのに有用な情報を安全に、かつ効率的に得ることができる。例えば、渋滞・混雑している地点を、その地点を通過する前に知ることができるので、渋滞や混雑を容易に回避することができる。また、地図に表示された渋滞・混雑の状態から目的地を変更したり、目的地に向かう順序を変更したりすることができる。
【0084】
なお、上記実施形態では、図4のように推定自車位置が3つ存在する場合に画面を4分割して表示する例について説明したが、これに限定されない。例えば、図7に示すように、現在位置VAと3つの推定自車位置A1〜A3とが1画面に入るような表示縮尺で広域の地図を画面全体に表示するとともに、推定自車位置A1〜A3の周辺地図DA1〜DA3を実際の推定自車位置A1〜A3付近に重畳して表示するようにしても良い。
【0085】
この図7に示す例において、推定自車位置が4つ以上存在する場合に、推定自車位置周辺の地図を全部一度に表示すると、画面が煩雑になってしまう。そこで、以下のようにすると好ましい。すなわち、画面上には推定自車位置周辺の地図を3つまで表示し、4つ目以降の推定自車位置についてはその位置に簡易的な所定のマークを表示しておく。図7中に示すA4がそれである。そして、画面をタッチパネルで構成しておき、マークA4の部分をタッチすることにより、推定自車位置A1〜A3の中から何れかの周辺地図を消去して所定のマークに置き換え、推定自車位置A4の周辺地図を代わりに表示するようにする。
【0086】
なお、図7において、それぞれの表示領域にある右下の値は地図の表示縮尺を示す。図7に示したように、推定自車位置を中心として縮尺が異なる地図を重ねるような表示方法を採ることによって、推定自車位置と現在の自車位置との関係をより明確にすることができる。
【0087】
さらに、図4または図7のように表示された地図において、推定自車位置A1〜A3の周辺地図を表示した表示領域DA1〜DA3の何れかに利用者がタッチすると、タッチした表示領域の推定自車位置までの誘導経路を探索して案内を開始したり、当該推定自車位置までの道路状況を、当該推定自車位置を推定する際に用いた推定目的地までのルートに基づき案内したりするようにすることも可能である。
【0088】
また、上記実施形態では、目的地推定部17によって複数の目的地を推定する例について説明したが、1つの目的地を推定するようにしても良い。この場合、ルート探索部18は、現在位置検出部11により検出された現在位置から目的地推定部17により推定された1つの目的地に至るルートを複数探索する。なお、複数の目的地を推定した場合にも、1つの推定目的地に対して複数のルートを探索するようにしても良い。
【0089】
このように、現在位置から1つの推定目的地に対して複数のルートを探索する場合は、以下のようにして処理を実行する。まず、現在位置から1つの推定目的地に至る様々なルート上のリンクコストを順次加算し、リンクコストの合計が最も小さいルートを選択する。これにより、1つ目のルートが選択される。
【0090】
1つ目のルートを探索したら、次に2つ目のルートを探索する。このとき、1つ目のルート上で現在位置から所定距離までの道路が2つ目のルート中に含まれないようにするために、1つ目のルート上で現在位置から所定距離分の道路リンクまたは現在位置から所定本数の道路リンクのコストに対して充分に大きな重みを加える。または、その道路リンクを仮想的に削除するようにしても良い。その上で、現在位置から推定目的地に至る様々なルート上のリンクコストを順次加算し、リンクコストの合計が最も小さいルートを選択する。これにより、2つ目のルートが選択される。3つ目以降のルートを探索する場合も、同様にして行う。
【0091】
また、上記実施形態では、自車位置から推定対象時間経過後の地点を推定自車位置として求める例について説明したが、これに限定されない。例えば、現在位置から推定目的地までのルート上で現在位置より所定距離だけ先にある地点を推定自車位置として求めるようにしても良い。推定対象時間経過後の地点を推定自車位置として求める場合も、所定距離だけ離れた地点を推定自車位置として求める場合も、推定しようとする地点が推定目的地を通り越してしまうような場合には、推定自車位置を求めることができない。この場合、推定対象時間経過後の地点を推定自車位置として求めるようにしているのであれば、利用者は、推定目的地まで推定対象時間以内に到着できるということが分かる。また、所定距離だけ離れた地点を推定自車位置として求めるようにしているのであれば、利用者は、推定目的地までの距離が所定距離以内であるということが分かる。
【0092】
その他、上記実施形態は、何れも本発明を実施するにあたっての具体化の一例を示したものに過ぎず、これによって本発明の技術的範囲が限定的に解釈されてはならないものである。すなわち、本発明はその精神、またはその主要な特徴から逸脱することなく、様々な形で実施することができる。
【産業上の利用可能性】
【0093】
本発明は、渋滞などの交通情報を案内地図上に表示する機能を有するナビゲーション装置に有用である。
【図面の簡単な説明】
【0094】
【図1】本実施形態によるナビゲーション装置の要部構成例を示すブロック図である。
【図2】自車位置推定部によって行われる推定自車位置の算出処理を説明するための図である。
【図3】本実施形態によるナビゲーション装置の動作を具体例に沿って説明するための図であり、あるタイミングにおける地図の状況を示す図である。
【図4】本実施形態によるナビゲーション装置の動作を具体例に沿って説明するための図であり、図3の状況下で表示装置に表示される画面の一例を示す図である。
【図5】本実施形態によるナビゲーション装置の動作を具体例に沿って説明するための図であり、図3の状態から一定時間を経過したタイミングにおける地図の状況を示す図である。
【図6】本実施形態のナビゲーション装置による動作の手順、すなわち、本実施形態による地図表示方法の処理手順を示すフローチャートである。
【図7】図3の状況下で表示装置に表示される画面の他の例を示す図である。
【図8】従来の問題点を例示して説明するための図である。
【符号の説明】
【0095】
11 現在位置検出部
13 交通情報取得部
17 目的地推定部
18 ルート探索部
19 自車位置推定部
20 地図表示制御部
21 表示装置
22 表示設定部
23 システム設定メモリ
【技術分野】
【0001】
本発明は、ナビゲーション装置および地図表示方法に関し、特に、渋滞などの交通情報を地図上に表示する機能を有するナビゲーション装置に用いて好適なものである。
【背景技術】
【0002】
一般に、車載用のナビゲーション装置では、自律航法センサやGPS(Global Positioning System)受信機などを用いて車両の現在位置を検出し、その近傍の地図データを記録媒体から読み出して画面上に表示する。そして、画面上の所定箇所に自車位置を示す自車位置マークを重ね合わせて表示することにより、車両の現在位置を一目で分かるようにしている。
【0003】
また、多くのナビゲーション装置は、道路交通情報センタ(VICSセンタ)から送られてくるVICS道路交通情報(以下、VICS情報と略す)を受信して、刻々と変化する道路状況を地図画面上に表示できるようになっている。VICS機能を搭載したナビゲーション装置では、渋滞情報や規制情報といった道路交通情報をリアルタイムにユーザに提供することが可能である。
【0004】
VICS情報は、主に一般道に設置された光ビーコン、主に高速道路上に設置された電波ビーコン、FM放送電波を利用したFM多重放送から取得することが可能である。このVICS情報には、レベル1、レベル2、レベル3の3種類の情報がある。上述のレベル3のVICS情報は、渋滞情報や規制情報を地図画面上の色付き矢印およびアイコンによって知らせるために利用される。
【0005】
すなわち、VICSセンタから送られてくる各リンク(交差点や分岐など複数の道路が交わる点をノード、隣接するノード間を結ぶベクトルをリンクと呼ぶ)の渋滞情報(渋滞/混雑/順調の何れか)に基づいて、各リンクに対応する道路の脇に渋滞箇所(赤の矢印)や混雑箇所(オレンジの矢印)が明滅表示され、空いている道路の脇には青の矢印が表示される。また、VICSセンタから送られてくる規制情報に基づいて、該当する箇所の道路の脇に規制を表すアイコンが表示される。
【0006】
また、ナビゲーション装置の殆どには経路誘導機能が搭載されている。この経路誘導機能では、地図データを用いて現在地から目的地までを結ぶコストが最も小さな経路を自動探索し、その探索した経路を誘導経路として地図画面上で他の道路とは色を変えて太く描画する。また、車両が誘導経路上の案内交差点に一定距離以内に近づいたときに交差点拡大図を表示して交差点案内を行うことにより、運転者を目的地まで案内するようになっている。
【0007】
上述した従来のナビゲーション装置が表示する地図は、自車の現在位置を中心とした周辺の地図である。そのため、現在の画面上に表示されていない、現在位置から少し離れた地点の地図や道路交通情報を見たい場合には、地図をスクロールさせて表示位置を移動したり、表示縮尺を変更して広域を表示したりするなどの操作を行う必要がある。
【0008】
地図をスクロールさせて所望の地点を表示しようとする場合、参照したい地点が現在位置から近ければ、単に地図をスクロールさせるだけで済むことが多い。ところが、参照したい地点が現在位置から非常に遠い場合は、地図の表示縮尺を一旦小さくして広域を表示し、その状態で地図をスクロールさせることにより、参照したい地点を画面の略中央に表示した後、表示縮尺を元に戻すといった操作が必要になる。このため、利用者に相当量の操作の負担を強いてしまうという問題があった。
【0009】
また、ナビゲーション装置が表示する道路には、高速道路や国道のような主要道路から、市道や私道のような一般道路・細街路まで、様々なものがある。ところが、一般的にナビゲーション装置が有する表示画面のサイズは小さく、画面上に表示できる情報量が限られているため、全ての表示縮尺で全ての道路を表示することはできない。そのため、地図の表示縮尺に合わせて道路を選択的に表示することで、画面上の情報過多を防いでいる。例えば、表示縮尺が大きい地図(狭い範囲の地図)を表示する場合は市道や私道などの細街路等も表示し、表示縮尺が小さい地図(広い範囲の地図)を表示する場合は、細街路等は表示せずに高速道路や国道のみを表示する。
【0010】
従来のナビゲーション装置は上述したように構成されているため、現在位置から少し離れた地点を表示するために表示縮尺を小さくすると、市道や私道などの一般道路を見ることができなくなってしまうという問題があった。市道や私道などが表示されないと、その道路に関する交通情報も表示されなくなってしまうため、交通情報を見るためには、上述したように、表示縮尺を小さくした地図をスクロールさせて所望の地点を画面の略中央に配置した後、表示縮尺を元に戻すといった操作が必要になる。
【0011】
図8は、上述した従来の問題点を例示して説明するための図である。図8において、破線の矩形A〜Dはある縮尺の地図の表示範囲であり、実線は道路を示す。太い実線は小さな縮尺でも表示される国道・県道といった主要道路を示し、細い実線は小さな縮尺でしか表示されない市道・私道といった一般道路を示している。矩形の領域A,C,Dは一般道路が表示される大きい縮尺の地図の表示領域であり、領域Bは主要道路しか表示されない小さい縮尺の地図の表示領域である。
【0012】
例えば、図8に示したように利用者が現在位置Pから目的地Gに向かって移動している場合、利用者は次の2つのルートの何れかを選択することができる。
(1)交差点I3を直進後、交差点I1を右折して目的地Gに向かうルート
(2)交差点I3を右折後、交差点I4を左折して目的地Gに向かうルート
この場合に、交差点I1、交差点I2、交差点I4の付近における道路の混雑度合いを事前に参照することができれば、渋滞や混雑を避けたルートを選択することが可能となる。
【0013】
さて、利用者が現在位置P周辺の地図を大きい縮尺で表示している場合(表示領域A)、表示縮尺を小さい縮尺に変更することで、交差点I1,I2,I4を地図上に表示することができる(表示領域B)。しかし、小さい表示縮尺では、交差点I2を南北方向に横切る一般道路(交差点I2,I4を通過する道路)や、交差点I4を東西方向に横切る一般道路(交差点I3,I4を通過する道路)が表示されない。そのため交差点I2を横切る一般道路を表示するためには、利用者は、所望の交差点(例えば、交差点I2)が地図の中心になるように地図をスクロールさせた後、大きい表示縮尺に変更する必要がある(表示領域D)。
【0014】
なお、交差点I1は主要道路どうしが交わる交差点なので、表示縮尺が小さい場合でも表示される。よって、この交差点I1の道路状況は、小さい表示縮尺に変更して表示領域Bの広域地図を表示するだけで、その後のスクロールや表示縮尺の変更といった面倒な手順を踏まなくとも確認可能である。ところが、小さい縮尺で表示した地図は広い領域を一度に表示しているため、画面上に表示される渋滞・混雑に関する複数の矢印の位置が近くなったり重なったりしてしまい、見辛くなる。
【0015】
さらに、利用者が行きたいと考えている目的地が複数存在する場合、上述した道路状況の確認作業は更に煩雑となる。例えば、複数の店舗を移動して買い物をするような場合、利用者は効率的な移動の順序を決定したいので、現在位置から各店舗・各店舗間の道路状況を確認することとなる。しかし、このような作業は煩雑であるので、多くの利用者はナビゲーション装置を使用せずに、生活圏での経験に基づき目的地に向かう順序を決定している。
【0016】
生活圏内を移動する利用者は、目的地に行くために走行する道路の混雑状況を確認したり、位置を詳細に確認したりするために地図を参照する。しかし、上述したように、従来のナビゲーション装置を利用して自車が走行する予定の道路の状況を確認する作業は多くの煩雑な操作を必要とし、走行中の操作は安全運転の妨げになってしまうという問題があった。
【0017】
なお、経路誘導機能を利用して探索した誘導経路上に渋滞がある場合に、渋滞している地点まで地図をスクロールしたり、渋滞している地点が見えるように表示縮尺を変更したりする技術が提案されている(例えば、特許文献1参照)。
【特許文献1】特開平11−2538号公報
【発明の開示】
【発明が解決しようとする課題】
【0018】
しかしながら、上記特許文献1に記載の技術は、誘導経路を設定していることが前提の技術であり、利用者が生活圏内を移動するときのように誘導経路を設定していない場合には利用することはできない。すなわち、特許文献1は、地図を自動的にスクロールして誘導経路上にある渋滞地点の情報を利用者に提供するだけであり、利用者が希望するであろう複数の地点の交通情報を提供することはできない。このため利用者は、誘導経路を設定せずに走行しているときに、自車が通るルートを決定するために有用な情報を得ることができない。
【0019】
また、広域にわたって誘導経路上の渋滞している地点が見えるように地図の表示縮尺を小さくした場合には、渋滞地点以外の地点も地図上に一緒に表示される。しかしながら、上述したように、小さい表示縮尺では主要道路が表示されるのみで、一般道路は表示されない。そのため、利用者が希望する地点の道路交通情報は表示されないことが多い。
【0020】
本発明は、このような問題を解決するために成されたものであり、例えば利用者が自身の生活圏内で誘導経路を設定せずに走行している場合でも、利用者に相当量の操作の負担を強いることなく、これから通過すると予想される地点における道路交通情報を利用者に提供できるようにすることを目的とする。
【課題を解決するための手段】
【0021】
上述した課題を解決するために、本発明のナビゲーション装置では、あらかじめ定められた推定基準に従って、1つまたは複数の目的地を推定する目的地推定手段と、現在位置から1つまたは複数の推定目的地に至る複数のルートを探索するルート探索手段と、探索された複数のルート上にある複数の地点を将来の自車位置として推定する自車位置推定手段と、複数の推定自車位置の周辺地図を所定の表示縮尺で表示するように制御する表示制御手段とを備えている。
【発明の効果】
【0022】
上記のように構成した本発明によれば、利用者が地図をスクロールさせたり表示縮尺を小さくしたりする操作を行わなくても、これから走行する可能性のある複数の地点が自動的に推定されてその推定自車位置の周辺地図が表示されることとなる。これにより、例えば利用者の生活圏内で誘導経路を設定せずに走行している場合でも、現在位置から少し離れた地点における道路交通情報を利用者に提供することができるようになる。
【0023】
したがって、利用者は、誘導経路を設定せずに走行しているときでも、煩雑な操作を行うことなく、最適な走行ルートを決定するのに有用な情報を得ることができる。例えば、渋滞・混雑している地点を、その地点を通過する前に知ることが可能になり、渋滞や混雑を容易に回避することができる。また、地図に表示された渋滞・混雑の状態から目的地を変更したり、目的地に向かう順序を変更したりすることもできる。
【発明を実施するための最良の形態】
【0024】
以下、本発明の一実施形態を図面に基づいて説明する。図1は、本実施形態によるナビゲーション装置の要部構成例を示すブロック図である。図1において、11は車両の現在位置を検出する現在位置検出部であり、自律航法センサ、GPS受信機、位置計算用CPU等で構成されている。自律航法センサは、所定走行距離毎に1個のパルスを出力して車両の移動距離を検出する車速センサ(距離センサ)と、車両の回転角度(移動方位)を検出する振動ジャイロ等の角速度センサ(相対方位センサ)とを含む。自律航法センサは、これらの車速センサおよび角速度センサによって車両の相対位置および方位を検出する。
【0025】
位置計算用CPUは、自律航法センサから出力される自車の相対的な位置および方位のデータに基づいて、絶対的な自車位置(推定車両位置)および車両方位を計算する。また、GPS受信機は、複数のGPS衛星から送られてくる電波をGPSアンテナで受信して、3次元測位処理あるいは2次元測位処理を行って車両の絶対位置および方位を計算する(車両方位は、現時点における自車位置と1サンプリング時間ΔT前の自車位置とに基づいて計算する)。
【0026】
12は地図情報メモリであり、地図表示やルート探索などに必要な各種の地図データを記憶している。この地図情報メモリ12に格納されている地図データは、例えば、現在位置検出部11によって検出された車両現在位置を含む所定範囲の地図データであり、例えばDVD−ROMやCD−ROM、ハードディスクなどの記録媒体(図示せず)から読み出されたものである。
【0027】
ここで、地図情報メモリ12に格納されている地図データの詳細を説明する。地図情報メモリ12に格納された地図データは、広い地域を一望するための上位レベルの地図から、狭い地域を詳細に記述した下位レベルの地図まで、レベルと呼ばれる単位に階層化して管理されている。各レベルの地図は、所定の経度および緯度で区切られた区画(メッシュやパーセルと言うこともある)と呼ばれる矩形領域を単位として分割されている。
【0028】
区画ごとの地図データには、地図表示に必要な各種のデータから成る描画ユニットと、マップマッチングや経路案内等の各種の処理に必要なデータから成る道路ユニットと、交差点の詳細データから成る交差点ユニットとが含まれている。また、上述した描画ユニットには、建物あるいは河川等を表示するために必要な背景レイヤのデータや、市町村名や道路名等を表示するために必要な文字レイヤのデータ等が含まれている。
【0029】
上述の道路ユニットは、交差点や分岐など、複数の道路が交わる点に対応するノードに関する情報と、道路上のあるノードとこれに隣接する他のノードとの間を接続する、道路や車線等に対応するリンクに関する情報とを含んでいる。すなわち、道路ユニットには、全ノードの詳細データを納めた接続ノードテーブルと、隣接する2つのノードによって特定されるリンクの詳細データを納めたリンクテーブルとが含まれている。
【0030】
接続ノードテーブルには、存在するノードのそれぞれ毎に、ノードの正規化経度・緯度、属性フラグ、交通規制の数、交通規制レコード等の情報が含まれている。正規化経度・緯度は、区画を基準とした経度方向・緯度方向の相対位置を示す。属性フラグは、そのノードが交差点ノードであることを示す交差点ノードフラグや、他の区画との境界にあるノードであることを示す隣接ノードフラグなどから成る。交通規制の数は、そのノードに接続されているリンクに右折禁止やUターン禁止等の交通規制が存在する場合に、その交通規制の数を示す。交通規制レコードは、上述した交通規制が存在する場合にはその数に対応した交通規制の具体的な内容を示す。
【0031】
また、リンクテーブルは、各区画に含まれる全てのリンクに対応したリンクレコードを格納している。各リンクレコードには、リンクの距離、リンクのコスト、道路属性フラグ、道路種別フラグ等の情報が含まれている。リンクの距離は、当該リンクに対応した実際の道路の実距離を示す。リンクのコストは、リンクの距離をもとに、道路幅員、道路種別(一般道か高速道路かなど)、法定速度、右折および左折、交通規制などに応じた所定の定数を乗じた値であり、誘導経路として適正の程度を数値化したものである。
【0032】
道路属性フラグは、そのリンクに関する各種の属性を示す。例えば、そのリンクがVICSセンタで管理しているVICSリンク(VICS情報を受信可能なリンク)と対応していることを示すVICSリンク対応フラグを含んでいる。道路種別フラグは、そのリンクに対応した実際の道路が属する道路区分のランクを示す。
【0033】
例えば、日本の道路区分では、上位ランクから順に(1)高速自動車国道、(2)都市高速道路、(3)一般国道、(4)主要地方道、(5)主要地方道(指定市道)、(6)一般都道府県道、(7)主要一般道、(8)一般道、(9)細道路、(10)フェリー航路(経路)、(11)カートレイン、(12)その他、のように区分されている。本実施形態では、このうち例えば(8)一般道以上のランクの道路を、後述する推定自車位置の周辺地図における表示対象道路とする。言い換えると、推定自車位置の周辺地図を、(8)一般道以上のランクの道路が表示される表示縮尺で表示するものとする。なお、(8)一般道以上というのは単なる一例に過ぎず、これに限定されるものではない。
【0034】
13は交通情報取得部であり、主に高速道路上に設置された電波ビーコン送受信機との間で電波を介して双方向通信を行うとともに、主に一般道路上に設置された光ビーコン送受信機との間で光を介して双方向通信を行うことにより、図示しないVICSセンタから送られてくるVICS情報(渋滞情報や規制情報を含む)を取得する。また、交通情報取得部13は、FM多重放送からもVICS情報を取得する。
【0035】
このVICS情報に含まれる渋滞情報は、あるVICSリンクの特定箇所がどの程度渋滞しているかを示すものであり、VICSリンク番号、開始点からの距離、長さ、渋滞の度合い等の各種情報を含んでいる。VICSリンク番号は、その道路に対応したリンク番号を示す。開始点からの距離は、渋滞等の始点(VICSリンクの一方端)からの距離を示す。長さは、渋滞等の区間を示す。渋滞の度合いは、例えば車両が一定の速度以下になる「混雑」と、ほとんど車両が動かなくなる「渋滞」との2種類の状態を特定する。
【0036】
14は駐車検出部であり、自車が駐車場などの施設に駐車したことを検出する。例えば、駐車検出部14は、図示しないスピードセンサやサイドブレーキの圧力センサ、アクセサリー電源等の状態を車両情報として入力するとともに、現在位置検出部11から車両の現在位置情報を入力する。そして、車両が施設内で停車してサイドブレーキが引かれたことを検出した後に、エンジンの再始動を検出したときに、現在停車している地点を駐車地点として検出する。
【0037】
15は駐車地点記録部であり、駐車検出部14により検出された駐車地点に関する情報を駐車地点情報記憶部16に記録する。駐車地点情報記憶部16に記憶される駐車地点情報には、例えば、駐車地点を表す位置、駐車した回数などの情報が含まれる。駐車地点情報記憶部16は、例えばハードディスクにより構成されるが、これに限定されるものではない。不揮発性の記録媒体であれば、ハードディスク以外の媒体を用いても良い。
【0038】
17は目的地推定部であり、あらかじめ定められた推定基準に従って、利用者が向かっていると考えられる地点(目的地)を複数推定する。この目的地の推定のために、駐車地点情報記憶部16に記憶されている駐車地点情報を利用する。例えば、駐車地点情報として記憶されている複数の駐車地点の中から、現在位置検出部11により検出された現在位置からの距離Rが第1の距離R1以上で第2の距離R2(R2>R1)以下の位置に存在する駐車地点で、かつ、駐車回数の多い地点を推定目的地として抽出する。ここで、駐車回数の多い地点から順番に所定数の駐車地点を抽出するようにしても良いし、駐車回数が所定回より多い駐車地点を全て抽出するようにしても良い。
【0039】
また、駐車地点情報として駐車開始時刻を記憶するようにし、以下のように目的地を推定するようにしても良い。すなわち、駐車地点情報として記憶されている各駐車地点に到着するまでの到着予想時刻をそれぞれ算出し、その到着予想時刻と各駐車地点の駐車開始時刻との差が小さい地点で、かつ、R1<R<R2の条件を満たす地点を推定目的地として抽出する。ここで、到着予想時刻と駐車開始時刻との差が小さい地点から順番に所定数の駐車地点を抽出するようにしても良いし、当該差が所定値より小さい駐車地点を全て抽出するようにしても良い。
【0040】
なお、到着予想時刻は、現在位置検出部11により検出された現在位置から各駐車地点に至るルート上にある各道路リンクの距離と、道路種別毎にあらかじめ設定された走行速度とを用いた演算によって算出する。道路種別に応じた走行速度は、利用者が指定することも可能である。例えば、高速道路は1km/分(60km/h)、一般道路は500m/分(30km/h)で走行するとナビゲーション装置に設定されている場合、高速道路10kmと一般道路3kmとを走行するルートの到着予想時刻は、高速道路を走行する時間10分と一般道路を走行する時間6分との合計16分の所要時間が現在時刻から経過した後の時刻となる。到着予想時刻の精度を上げるために、リンクの距離と道路種別毎に設定された走行速度とから得られる所要時間に加えて、VICS情報より取得できる区間旅行時間や右左折にかかる時間を加味して到着予想時刻を算出しても良い。
【0041】
また、各駐車地点に駐車したときの自車の出発時刻を駐車地点情報として記憶するようにし、以下のように目的地を推定するようにしても良い。すなわち、車両が走行を開始した時刻と、駐車地点情報として記憶されている出発時刻との差が小さい地点で、かつ、R1<R<R2の条件を満たす地点を推定目的地として抽出する。ここで、実際の出発時刻と駐車地点情報の出発時刻との差が小さい地点から順番に所定数の駐車地点を抽出するようにしても良いし、当該差が所定値より小さい駐車地点を全て抽出するようにしても良い。
【0042】
なお、ここでは目的地を推定するために、駐車検出部14、駐車地点記録部15および駐車地点情報記憶部16を設けているが、この例に限定されない。例えば、駐車地点情報の代わりに走行履歴情報を記憶するようにし、この走行履歴情報から目的地を推定することも可能である。例えば、右左折した交差点や、よく通る道路上に存在する一地点などを走行履歴情報として記憶するようにし、この記憶されている複数地点のうち、R1<R<R2の条件を満たす地点を推定目的地として抽出することが可能である。
【0043】
目的地推定部17は、現在位置検出部11によって自車位置の移動を検出するたびに上述した目的地の推定処理を実行し、現在位置を基準とした目的地を随時推定する。例えば、R1<R<R2の条件を満たす地点を推定目的地として一旦設定しても、その推定目的地に車両が近づいていくと、R1<Rの条件を満たさなくなり、その地点は推定目的地から外される。一方、当初はR<R2の条件を満たさずに推定目的地に設定されていなかった地点も、その地点に車両が近づいていくとR1<R<R2の条件を満たすようになり、その地点が新たに推定目的地として設定されることとなる。
【0044】
18はルート探索部であり、現在位置検出部11により検出された現在位置から目的地推定部17により推定された複数の目的地に至る複数のルートを探索する。すなわち、現在位置と推定目的地との間を結ぶルートを、複数の推定目的地毎に1本ずつ探索する。具体的には、地図情報メモリ12に格納されている地図データを用いて、それぞれの推定目的地毎に、現在位置から推定目的地までを結ぶ最もコストが小さな経路を探索し、その探索した経路を各推定目的地に対するルートとして設定する。このときルート探索部18は、渋滞や工事などに関するコストの重み付けはせずにルート探索を実行する。
【0045】
ルート探索は、幅優先探索(BFS)法あるいはダイクストラ法などのシミュレーションにより実行する。このときの探索条件は、時間最短、距離最短、料金最小等の各種条件のうちナビゲーション装置によってあらかじめ設定されている条件を使用する。この探索条件は、利用者が指定することも可能である。同じルートであっても、どの探索条件で探索するかによって、コストは異なったものとなる。なお、探索条件の種類は上述のものに限られない。例えば、通過信号数最小、右折数最小、左折数最小、道路幅最大、交通量最小等の条件でルート探索を行っても良い。
【0046】
19は自車位置推定部であり、ルート探索部18により探索された複数のルート上にある複数の地点を、将来の自車位置として推定する。例えば、自車位置推定部19は、複数のルート上において現在位置から所定時間(以下、推定対象時間と言う)の経過後に車両が居ると予想される複数の地点を推定自車位置として求める。この推定対象時間は、例えば、ナビゲーション装置によりあらかじめ設定されている。
【0047】
推定対象時間の経過後における推定自車位置は、ルート探索部18により算出されたルートを構成している道路リンクの走行時間を累算し、累算した走行時間と推定対象時間とが等しくなる地点を求めることによって算出する。図2は、自車位置推定部19によって行われる推定自車位置の算出処理を説明するための図である。図2において、Ln(n=1,2,・・・,6)はそれぞれルート上の道路リンクを示し、tn(n=1,2,・・・,6)はそれぞれの道路リンクの走行時間を示している。自車は、道路リンクL1の開始地点に存在する。
【0048】
上述のように、道路リンクは道路属性フラグによって高速道路・国道・県道・一般道などの属性を持っている。自車位置推定部19は、ナビゲーション装置や利用者によってこれらの道路種別毎に設定された走行速度に基づいて、それぞれの道路リンクの走行時間を算出する。すなわち、道路リンクの長さを走行速度で割ることにより、当該道路リンクの走行時間を算出できる。
【0049】
例えば、高速道路では1分間に1km走行でき、一般道では1分間に300m走行できると定義されている場合、仮に道路リンクL1が一般道で3kmの道路リンクであるとした場合、走行時間t1は10分となる。また、道路リンクL2の走行時間が10分、道路リンクL3の走行時間が20分であると仮定した場合、推定対象時間30分を経過した後の自車位置は、道路リンクL3の中間地点にあると推定できる。
【0050】
また、ルート上に渋滞がある場合は、渋滞が発生している道路リンクの走行時間に対して、渋滞が発生していることを表した係数を掛けたり、渋滞の長さを考慮した追加時間を加えたりするなどして、推定対象時間経過後の自車位置を推定する。自車位置推定部19は、現在位置検出部11によって自車位置の移動を検出するたびに上述した自車位置の推定処理を実行し、現在位置を基準とした将来の自車位置を随時推定する。
【0051】
20は地図表示制御部であり、地図情報メモリ12に格納された地図データに基づいて、表示装置21に対する自車位置周辺の地図の表示を制御する。このとき地図表示制御部20は、地図データに基づき地図画像データを生成するとともに、交通情報取得部13により取得されるVICS情報に基づき道路状況を表す矢印画像データを生成する。そして、各リンクに対応する道路の脇に渋滞箇所(赤の矢印)や混雑箇所(オレンジの矢印)を明滅表示し、空いている道路の脇には青の矢印を表示する。また、規制の存在する道路の脇に規制を表すアイコンを表示する。
【0052】
また、地図表示制御部20は、本発明の表示制御手段に相当し、自車位置推定部19により推定された複数の推定自車位置の周辺地図を所定の表示縮尺で表示するように制御する。所定の表示縮尺とは、例えば、道路種別で一般道以上にランクされた道路が表示される縮尺であり、ナビゲーション装置によりあらかじめ設定されている。この推定自車位置の周辺地図上にも、渋滞・混雑などを表す矢印画像や、規制を表すアイコンなどを表示する。
【0053】
推定自車位置の周辺地図は、道路(およびその名称)と、道路の渋滞・混雑・規制などを表す交通情報といった、道路に係わる情報のみを表示するのが好ましい。すなわち、道路に関わらない情報は利用者にとって不要であると考えられるので、この種の情報を地図上に極力表示しないようにすることで、利用者が極力短い時間で必要な情報を取得できるようにする。
【0054】
22は表示設定部であり、推定自車位置を求める際の推定対象時間や、推定自車位置の周辺地図を表示する際の表示縮尺を利用者がシステム設定メモリ23に設定するためのものである。この表示設定部22は、例えばリモートコントローラや表示装置21のタッチパネルなどを備えて構成されている。利用者は、この表示設定部22を用いて、推定対象時間や表示縮尺を好みの値に設定することが可能である。表示設定部22およびシステム設定メモリ23により、本発明の所定時間設定手段および表示縮尺設定手段が構成される。
【0055】
なお、システム設定メモリ23に推定対象時間や表示縮尺が設定されているときは、ナビゲーション装置によってあらかじめ設定されているものよりも優先して使用する。または、利用者による設定情報とナビゲーション装置によるデフォルトの設定情報との何れかを利用者が選択(選択情報)できるようにしても良い。当該選択情報も、システム設定メモリ23に格納される。自車位置推定部19および地図表示制御部20は、システム設定メモリ23に推定対象時間や表示縮尺の情報が格納されていて、かつ、それが「有効」に設定されているときは、この格納情報に従って処理を実行する。
【0056】
推定対象時間の設定に関しては、例えば10分後という情報を1つ設定することが可能である。また、10分後、20分後、30分後のように複数の推定対象時間を設定するようにしても良い。この場合、地図表示制御部20は、10分後、20分後、30分後の推定自車位置を中心とした地図を一画面上に同時に表示しても良いが、表示が煩雑になるので、例えば1分毎といったように一定時間毎に切り替えて表示してもよい。
【0057】
このように、複数の推定対象時間を設定し、それぞれの推定対象時間後における推定自車位置周辺の地図を表示することによって、1つのルート上にある複数の推定自車位置に関する渋滞や混雑などの交通情報を、実際にその地点を通過する前に表示装置21に表示し、利用者に提供することができる。
【0058】
表示縮尺の設定に関しては、次の2通りの設定方法が考えられる。1つ目は、道路種別で一般道以上にランクされた道路が表示されるように、所定値より大きい縮尺に限定して利用者に選択させる方法である。例えば、所定値より大きい表示縮尺のみを画面上にリスト表示して利用者に選択させるようにすることで、所定値より小さい表示縮尺は選択できないようにする。または、選択自体は自由にできるが、所定値より小さい表示縮尺が選択されたときに警告メッセージを出して再選択を促すようにしても良い。
【0059】
2つ目の方法は、表示縮尺の設定は全く利用者の自由に任せる方法である。ただし、所定値より小さい表示縮尺が設定されてしまうと、推定自車位置の周辺地図が広域で表示されることとなるので、市道や私道などが交わる交差点に関する交通情報(渋滞や混雑を表す矢印表示など)が表示されなくなってしまう。そこで、この場合に地図表示制御部20は、表示設定部22により設定された表示縮尺が所定値より大きいときは、その表示縮尺を採用して推定自車位置の周辺地図を表示する。一方、表示設定部22により設定された表示縮尺が所定値以下のときは、所定値以上でナビゲーション装置によってあらかじめ定められた表示縮尺を採用して推定自車位置の周辺地図を表示するように制御する。
【0060】
次に、上記のように構成した本実施形態によるナビゲーション装置の動作を説明する。図3〜図5は、本実施形態によるナビゲーション装置の動作を具体例に沿って説明するための図である。このうち図3は、あるタイミングにおける自車位置VA、推定目的地G1〜G3、推定自車位置A1〜A3の状況を示す図である。図4は、図3の状況下で表示装置21に表示される画面の一例を示す図である。図5は、図3の状態から一定時間を経過したタイミングにおける自車位置VB、推定目的地G1〜G3、推定自車位置B1〜B3の状況を示す図である。
【0061】
図3に示す例では、現在位置検出部11により検出された現在位置VAと、駐車地点情報記憶部16に格納されている駐車地点情報とに基づいて、目的地推定部17が現在位置VAからの距離Rが第1の距離R1以上で第2の距離R2以下の位置に存在する3つの地点G1〜G3を推定目的地として抽出している。
【0062】
このときルート探索部18は、現在位置VAから推定目的地G1〜G3までを結ぶ各1本(合計3本)のルートRA1〜RA3を探索する。なお、波線(のこぎり線)は道路上の渋滞を示す。上述したように、ルート探索部18は渋滞を考慮せずにコスト最小のルートを探索するので、ルートRA1とルートRA3は渋滞を通過するルートとなっている。
【0063】
自車位置推定部19は、3つのルートRA1〜RA3上にある地点で、現在位置VAから推定対象時間の経過後に自車が居るであろう複数の地点A1〜A3を推定自車位置として求める。地図表示制御部20は、3つの推定自車位置A1〜A3を中心とした周辺地図をそれぞれ所定の表示縮尺で表示装置21に表示するように制御する。破線の矩形で示した領域DA1〜DA3が、推定自車位置A1〜A3を含む表示地図の領域を示す。
【0064】
実際に表示装置21に表示される画像の例が、図4に示されている。図4において、左上の画像は推定自車位置A1を中心とした表示領域DA1の地図、右上の画像は推定自車位置A2を中心とした表示領域DA2の地図、右下の画像は推定自車位置A3を中心とした表示領域DA3の地図をそれぞれ示している。また、左下の画像は、現在位置VAと3つの表示領域DA1〜DA3とを含む広域の地図を示している。このように、図4の例では、一画面を4つに分割して、それぞれの分割領域に異なる領域の地図を表示するようにしている。
【0065】
なお、推定自車位置A1,A3を中心とした地図に含まれる黒色の矢印J1,J3は、渋滞や混雑の区間を表す矢印表示である。また、推定自車位置A1〜A3を中心とした地図に含まれる白抜きの矢印AW1〜AW3は、自車の現在位置VAの方向を示す。
【0066】
仮に、利用者が推定目的地G1に向かっているとした場合、利用者は図3に示した道路X,Y,Zの何れかを利用して目的地G1に向かうことが可能である。この場合に利用者は、表示装置21に図4のように表示された推定自車位置A1周辺の地図と、推定自車位置A2周辺の地図とを参照し、利用者の要求に適した道路を走行して目的地G1に向かうことが可能となる。例えば、利用者が早く目的地G1に到着したいと考えている場合、推定自車位置A1周辺の地図と推定自車位置A2周辺の地図とを比較し、混雑していない道路、すなわち、推定自車位置A2付近を走行して目的地G1に向かうことができるようになる。
【0067】
なお、図4に示す画面例において、左下に示す現在位置VA周辺の広域地図は必須の表示ではないが、現在位置VA周辺の広域地図を表示することによって、自車の現在位置VAと推定自車位置A1〜A3との位置関係が明確になるので好ましい。現在位置VA周辺を表示した地図において、推定自車位置A1〜A3周辺の地図の表示領域DA1〜DA3を示すことによって、それぞれの地図の位置をより明確に表すことができる。現在位置VAと推定自車位置A1〜A3との位置関係を更に明確にするために、左下の画像中に現在位置VAと推定自車位置A1〜A3との距離を表示してもよい。また、左下の画像中に推定目的地G1〜G3の方向を表示しても良い。
【0068】
図3のような状態から一定時間が経過すると、図5のように自車の現在位置がVAからVBに進む。このとき目的地推定部17は、現在位置検出部11により検出された現在位置VBと、駐車地点情報記憶部16に格納されている駐車地点情報とに基づいて目的地を推定した結果、現在位置VBからの距離Rが第1の距離R1以上で第2の距離R2以下の位置に存在する3つの地点G1〜G3を推定目的地として抽出している。推定目的地G1〜G3は、図3のタイミングから変わっていない。
【0069】
ただし、ルート探索部18が現在位置VBから推定目的地G1〜G3までを結ぶルートを探索した結果、ルートRB1〜RB3が得られている。ルートRB2は直前のルートRA2と同じであるが、ルートRA1とルートRB1、ルートRA3とルートRB3はそれぞれ異なったものとなっている。なお、ルートRB3は、現在位置VBから直近の交差点が右左折するには近すぎるため、これを直進するルートが探索されている。
【0070】
自車位置推定部19は、3つのルートRB1〜RB3上にある地点で、現在位置VBから推定対象時間の経過後に自車が居るであろう複数の地点B1〜B3を推定自車位置として求める。地図表示制御部20は、3つの推定自車位置B1〜B3を中心とした周辺地図をそれぞれ所定の表示縮尺で表示装置21に表示するように制御する。破線の矩形で示した領域DB1〜DB3が、推定自車位置B1〜B3を含む表示地図の領域を示す。このように、自車の移動に伴い現在位置がVAからVBに変化することによって、推定自車位置もA1〜A3からB1〜B3に変化し、表示領域がDA1〜DA3からDB1〜DB3に変わっている。
【0071】
自車の現在位置がVBであるときに、表示装置21には図4と同様の形式で推定自車位置B1〜B3周辺の地図と、自車の現在位置VB周辺の広域地図とが表示される(図示を省略)。利用者の目的地は元々地点G1であったが、表示装置21に表示された地図を見ることによって、推定目的地G1に向かう途中の推定自車位置B1付近の道路が非常に混雑し、推定目的地G2に向かう途中の推定自車位置B2付近の道路が混雑していないことが分かる。そこで利用者は、推定目的地G2に立ち寄って別の所用を済ませてから推定目的地G1に向かう、あるいは、道路Zを通って推定目的地G1に向かうなど、地図から得た情報に基づいて走行する道路や施設などへの立ち寄り順序を自由に決定することができるようになる。
【0072】
図5のような状態からまた一定時間が経過すると、自車の現在位置がVBから更に先に進む。例えば、利用者が推定目的地G2に向かったとすると、自車位置と推定目的地G2との距離が小さくなっていく。そうすると、推定目的地G2はいずれR1<R<R2の条件を満たさなくなるので、推定目的地としては成り立たなくなり、そこへ向かうルート上における推定自車位置付近の地図は画面上から消えることになる(例えば、図4のように4分割された画面で右上の地図が消えた状態)。しかし、この状況で推定目的地G2までの距離は僅かであり、利用者は生活圏内を走行しているので、道に迷うことなく推定目的地に辿り着くことができる。
【0073】
一方、自車位置が変化した結果として、当初はR<R2の条件を満たさずに推定目的地に設定されなかった地点も、その地点に車両が近づいていくことによってR1<R<R2の条件を満たすようになり、その地点が新たに推定目的地として設定されることもある。この場合には、その新たな推定目的地に対して引かれたルート上にある推定自車位置の周辺の地図が、新たに画面上に表示されることになる。
【0074】
このように、推定自車位置の数は常に一定ではなく、変化することがある。そこで、地図表示制御部20は、推定自車位置の数に応じて表示装置21の画面分割数を決定するようにしても良い。例えば、推定自車位置の数が1個の場合は画面を2分割し、その推定自車位置周辺の地図と現在位置周辺の地図とを表示するようにする。また、推定自車位置の数が2〜3個の場合は画面を4分割して、推定自車位置周辺の地図と現在位置周辺の地図とを表示するようにする(推定自車位置が2個の場合は、1つの分割画面は非表示)。
【0075】
また、推定自車位置の数が4〜15個の場合は画面を16分割し、推定自車位置周辺の地図と現在位置周辺の地図とを表示するようにする(推定自車位置が4〜14個の場合は、非表示の分割画面が存在する)。なお、16分割では1つの画面が小さくなり過ぎるので、画面分割数は2分割または4分割としておき、例えば1分毎といったように一定時間毎に切り替えて表示するようにしてもよい。また、推定目的地を設定するときに、その数が多くなり過ぎないように制限を設けておけば、そもそも画面分割数を多くする必要はなくなる。
【0076】
図6は、本実施形態のナビゲーション装置による動作の手順、すなわち、本実施形態による地図表示方法の処理手順を示すフローチャートである。図6において、まず、現在位置検出部11によって車両の現在位置を検出する(ステップS1)。次に、目的地推定部17により、あらかじめ定められた推定基準に従って複数の目的地を推定する(ステップS2)。
【0077】
ここで、目的地推定部17は、推定目的地となるための条件を満たす地点の有無を判定する(ステップS3)。推定目的地となり得る地点が1つも存在しなかった場合には、その旨を地図表示制御部20に通知し、ステップS1で検出された現在位置周辺の地図のみを表示装置21に表示するようにする(ステップS8)。
【0078】
一方、推定目的地となり得る地点が1つ以上存在した場合には、ルート探索部18によって、ステップS1で検出された現在位置からステップS2で抽出された推定目的地に至るルートをそれぞれ探索する(ステップS4)。そして、自車位置推定部19によって、ステップS4で探索されたルート上にある地点を将来の自車位置として推定する(ステップS5)。推定目的地が複数ある場合は、原則として、それぞれの推定目的地に対して引かれたルート上に1つずつ推定自車位置が求められる。
【0079】
ただし、現在位置から探索ルートに沿って推定対象時間経過後の地点を求めようとすると、探索ルートの最終地点である推定目的地を通り越してしまうことがある。この場合には、推定自車位置を求めることができない。そこで、自車位置推定部19は、推定自車位置の有無を判定する(ステップS6)。推定自車位置が1つも求められなかった場合には、その旨を地図表示制御部20に通知し、ステップS1で検出された現在位置周辺の地図のみを表示装置21に表示するようにする(ステップS8)。
【0080】
一方、推定自車位置が1つ以上求められた場合には、その旨を地図表示制御部20に通知する。地図表示制御部20は、求められた推定自車位置の周辺の地図を所定の表示縮尺で表示装置21に表示するようにする(ステップS7)。例えば、推定自車位置が3つ存在する場合には、図4に示したように一画面を4つに分割して、それぞれの分割領域に推定自車位置周辺の詳細地図と自車位置周辺の広域地図とを表示する。
【0081】
ステップS7またはステップS8の処理が終わったら、ステップS1に戻り、以上の処理を繰り返し実行する。
【0082】
以上詳しく説明したように、本実施形態によれば、あらかじめ定められた推定基準に従って目的地を推定し、現在位置から推定目的地に至るルート上にある地点を将来の自車位置として推定して、推定自車位置の周辺地図を所定の表示縮尺で表示するようにしている。これにより、利用者は走行中に何ら操作をすることなく、これから走行する可能性のある地点を含む地図(交通情報を含む)を参照することができるようになる。なお、表示設定部22を用いて推定対象時間や表示縮尺を利用者が設定する場合には、そのための操作が若干必要になるが、この操作も走行中には全く不要である。上述したように、走行中の操作が不要なので、より安全な運転が可能となる。
【0083】
したがって、利用者は、誘導経路を設定せずに走行しているときでも、煩雑な操作を行うことなく、目的地へ行くのに都合の良いルートを選択するのに有用な情報を安全に、かつ効率的に得ることができる。例えば、渋滞・混雑している地点を、その地点を通過する前に知ることができるので、渋滞や混雑を容易に回避することができる。また、地図に表示された渋滞・混雑の状態から目的地を変更したり、目的地に向かう順序を変更したりすることができる。
【0084】
なお、上記実施形態では、図4のように推定自車位置が3つ存在する場合に画面を4分割して表示する例について説明したが、これに限定されない。例えば、図7に示すように、現在位置VAと3つの推定自車位置A1〜A3とが1画面に入るような表示縮尺で広域の地図を画面全体に表示するとともに、推定自車位置A1〜A3の周辺地図DA1〜DA3を実際の推定自車位置A1〜A3付近に重畳して表示するようにしても良い。
【0085】
この図7に示す例において、推定自車位置が4つ以上存在する場合に、推定自車位置周辺の地図を全部一度に表示すると、画面が煩雑になってしまう。そこで、以下のようにすると好ましい。すなわち、画面上には推定自車位置周辺の地図を3つまで表示し、4つ目以降の推定自車位置についてはその位置に簡易的な所定のマークを表示しておく。図7中に示すA4がそれである。そして、画面をタッチパネルで構成しておき、マークA4の部分をタッチすることにより、推定自車位置A1〜A3の中から何れかの周辺地図を消去して所定のマークに置き換え、推定自車位置A4の周辺地図を代わりに表示するようにする。
【0086】
なお、図7において、それぞれの表示領域にある右下の値は地図の表示縮尺を示す。図7に示したように、推定自車位置を中心として縮尺が異なる地図を重ねるような表示方法を採ることによって、推定自車位置と現在の自車位置との関係をより明確にすることができる。
【0087】
さらに、図4または図7のように表示された地図において、推定自車位置A1〜A3の周辺地図を表示した表示領域DA1〜DA3の何れかに利用者がタッチすると、タッチした表示領域の推定自車位置までの誘導経路を探索して案内を開始したり、当該推定自車位置までの道路状況を、当該推定自車位置を推定する際に用いた推定目的地までのルートに基づき案内したりするようにすることも可能である。
【0088】
また、上記実施形態では、目的地推定部17によって複数の目的地を推定する例について説明したが、1つの目的地を推定するようにしても良い。この場合、ルート探索部18は、現在位置検出部11により検出された現在位置から目的地推定部17により推定された1つの目的地に至るルートを複数探索する。なお、複数の目的地を推定した場合にも、1つの推定目的地に対して複数のルートを探索するようにしても良い。
【0089】
このように、現在位置から1つの推定目的地に対して複数のルートを探索する場合は、以下のようにして処理を実行する。まず、現在位置から1つの推定目的地に至る様々なルート上のリンクコストを順次加算し、リンクコストの合計が最も小さいルートを選択する。これにより、1つ目のルートが選択される。
【0090】
1つ目のルートを探索したら、次に2つ目のルートを探索する。このとき、1つ目のルート上で現在位置から所定距離までの道路が2つ目のルート中に含まれないようにするために、1つ目のルート上で現在位置から所定距離分の道路リンクまたは現在位置から所定本数の道路リンクのコストに対して充分に大きな重みを加える。または、その道路リンクを仮想的に削除するようにしても良い。その上で、現在位置から推定目的地に至る様々なルート上のリンクコストを順次加算し、リンクコストの合計が最も小さいルートを選択する。これにより、2つ目のルートが選択される。3つ目以降のルートを探索する場合も、同様にして行う。
【0091】
また、上記実施形態では、自車位置から推定対象時間経過後の地点を推定自車位置として求める例について説明したが、これに限定されない。例えば、現在位置から推定目的地までのルート上で現在位置より所定距離だけ先にある地点を推定自車位置として求めるようにしても良い。推定対象時間経過後の地点を推定自車位置として求める場合も、所定距離だけ離れた地点を推定自車位置として求める場合も、推定しようとする地点が推定目的地を通り越してしまうような場合には、推定自車位置を求めることができない。この場合、推定対象時間経過後の地点を推定自車位置として求めるようにしているのであれば、利用者は、推定目的地まで推定対象時間以内に到着できるということが分かる。また、所定距離だけ離れた地点を推定自車位置として求めるようにしているのであれば、利用者は、推定目的地までの距離が所定距離以内であるということが分かる。
【0092】
その他、上記実施形態は、何れも本発明を実施するにあたっての具体化の一例を示したものに過ぎず、これによって本発明の技術的範囲が限定的に解釈されてはならないものである。すなわち、本発明はその精神、またはその主要な特徴から逸脱することなく、様々な形で実施することができる。
【産業上の利用可能性】
【0093】
本発明は、渋滞などの交通情報を案内地図上に表示する機能を有するナビゲーション装置に有用である。
【図面の簡単な説明】
【0094】
【図1】本実施形態によるナビゲーション装置の要部構成例を示すブロック図である。
【図2】自車位置推定部によって行われる推定自車位置の算出処理を説明するための図である。
【図3】本実施形態によるナビゲーション装置の動作を具体例に沿って説明するための図であり、あるタイミングにおける地図の状況を示す図である。
【図4】本実施形態によるナビゲーション装置の動作を具体例に沿って説明するための図であり、図3の状況下で表示装置に表示される画面の一例を示す図である。
【図5】本実施形態によるナビゲーション装置の動作を具体例に沿って説明するための図であり、図3の状態から一定時間を経過したタイミングにおける地図の状況を示す図である。
【図6】本実施形態のナビゲーション装置による動作の手順、すなわち、本実施形態による地図表示方法の処理手順を示すフローチャートである。
【図7】図3の状況下で表示装置に表示される画面の他の例を示す図である。
【図8】従来の問題点を例示して説明するための図である。
【符号の説明】
【0095】
11 現在位置検出部
13 交通情報取得部
17 目的地推定部
18 ルート探索部
19 自車位置推定部
20 地図表示制御部
21 表示装置
22 表示設定部
23 システム設定メモリ
【特許請求の範囲】
【請求項1】
車両の現在位置を検出する現在位置検出手段と、
あらかじめ定められた推定基準に従って、1つまたは複数の目的地を推定する目的地推定手段と、
上記現在位置検出手段により検出された現在位置から上記目的地推定手段により推定された1つまたは複数の目的地に至る複数のルートを探索するルート探索手段と、
上記ルート探索手段により探索された複数のルート上にある複数の地点を、将来の自車位置として推定する自車位置推定手段と、
上記自車位置推定手段により推定された複数の推定自車位置の周辺の地図を所定の表示縮尺で表示するように制御する表示制御手段とを備えたことを特徴とするナビゲーション装置。
【請求項2】
上記自車位置推定手段は、上記複数のルート上において上記現在位置から所定時間の経過後に車両が居るであろう複数の地点を上記推定自車位置として求めることを特徴とする請求項1に記載のナビゲーション装置。
【請求項3】
上記自車位置推定手段は、上記複数のルート上において上記現在位置から所定距離だけ離れた複数の地点を上記推定自車位置として求めることを特徴とする請求項1に記載のナビゲーション装置。
【請求項4】
上記所定時間を利用者からの指示に応じて設定する所定時間設定手段を更に備えたことを特徴とする請求項2に記載のナビゲーション装置。
【請求項5】
所定値より大きい縮尺の中から利用者により選択された表示縮尺を上記所定の表示縮尺として設定する表示縮尺設定手段を更に備えたことを特徴とする請求項1に記載のナビゲーション装置。
【請求項6】
利用者により任意に選択された表示縮尺を設定する表示縮尺設定手段を更に備え、
上記表示制御手段は、上記表示縮尺設定手段により設定された表示縮尺が所定値より大きいときは、上記表示縮尺設定手段により設定された表示縮尺を上記所定の表示縮尺として地図を表示し、上記表示縮尺設定手段により設定された表示縮尺が上記所定値以下のときは、上記所定値以上であらかじめ定められた表示縮尺を上記所定の表示縮尺として地図を表示することを特徴とする請求項1に記載のナビゲーション装置。
【請求項7】
現在位置検出手段が車両の現在位置を検出する第1のステップと、
あらかじめ定められた推定基準に従って、目的地推定手段が1つまたは複数の目的地を推定する第2のステップと、
ルート探索手段が、上記第1のステップで検出された現在位置から上記第2のステップで推定された1つまたは複数の目的地に至る複数のルートを探索する第3のステップと、
自車位置推定手段が、上記第3のステップで探索された複数のルート上にある複数の地点を、将来の自車位置として推定する第4のステップと、
表示制御手段が、上記第4のステップで推定された複数の推定自車位置の周辺の地図を所定の表示縮尺で表示するように制御する第5のステップとを有することを特徴とする地図表示方法。
【請求項1】
車両の現在位置を検出する現在位置検出手段と、
あらかじめ定められた推定基準に従って、1つまたは複数の目的地を推定する目的地推定手段と、
上記現在位置検出手段により検出された現在位置から上記目的地推定手段により推定された1つまたは複数の目的地に至る複数のルートを探索するルート探索手段と、
上記ルート探索手段により探索された複数のルート上にある複数の地点を、将来の自車位置として推定する自車位置推定手段と、
上記自車位置推定手段により推定された複数の推定自車位置の周辺の地図を所定の表示縮尺で表示するように制御する表示制御手段とを備えたことを特徴とするナビゲーション装置。
【請求項2】
上記自車位置推定手段は、上記複数のルート上において上記現在位置から所定時間の経過後に車両が居るであろう複数の地点を上記推定自車位置として求めることを特徴とする請求項1に記載のナビゲーション装置。
【請求項3】
上記自車位置推定手段は、上記複数のルート上において上記現在位置から所定距離だけ離れた複数の地点を上記推定自車位置として求めることを特徴とする請求項1に記載のナビゲーション装置。
【請求項4】
上記所定時間を利用者からの指示に応じて設定する所定時間設定手段を更に備えたことを特徴とする請求項2に記載のナビゲーション装置。
【請求項5】
所定値より大きい縮尺の中から利用者により選択された表示縮尺を上記所定の表示縮尺として設定する表示縮尺設定手段を更に備えたことを特徴とする請求項1に記載のナビゲーション装置。
【請求項6】
利用者により任意に選択された表示縮尺を設定する表示縮尺設定手段を更に備え、
上記表示制御手段は、上記表示縮尺設定手段により設定された表示縮尺が所定値より大きいときは、上記表示縮尺設定手段により設定された表示縮尺を上記所定の表示縮尺として地図を表示し、上記表示縮尺設定手段により設定された表示縮尺が上記所定値以下のときは、上記所定値以上であらかじめ定められた表示縮尺を上記所定の表示縮尺として地図を表示することを特徴とする請求項1に記載のナビゲーション装置。
【請求項7】
現在位置検出手段が車両の現在位置を検出する第1のステップと、
あらかじめ定められた推定基準に従って、目的地推定手段が1つまたは複数の目的地を推定する第2のステップと、
ルート探索手段が、上記第1のステップで検出された現在位置から上記第2のステップで推定された1つまたは複数の目的地に至る複数のルートを探索する第3のステップと、
自車位置推定手段が、上記第3のステップで探索された複数のルート上にある複数の地点を、将来の自車位置として推定する第4のステップと、
表示制御手段が、上記第4のステップで推定された複数の推定自車位置の周辺の地図を所定の表示縮尺で表示するように制御する第5のステップとを有することを特徴とする地図表示方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】

【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2007−85938(P2007−85938A)
【公開日】平成19年4月5日(2007.4.5)
【国際特許分類】
【出願番号】特願2005−276432(P2005−276432)
【出願日】平成17年9月22日(2005.9.22)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
【公開日】平成19年4月5日(2007.4.5)
【国際特許分類】
【出願日】平成17年9月22日(2005.9.22)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
[ Back to top ]