
ハイブリッド車両の制御装置
【課題】変速段の切替時に運転者が覚える違和感を軽減することが可能なハイブリッド車両の制御装置を提供する。
【解決手段】入力軸11が内燃機関2と接続され、出力軸12が駆動輪5と接続された変速機10と、MG3を入力軸11と接続する入力軸接続状態とMG3を出力軸12と接続する出力軸接続状態とに切り替え可能な第2クラッチ25とを備えた車両1に適用され、第2クラッチ25が出力軸接続状態のときに変速機10が変速される場合には駆動輪5に伝達されるトルクが変動しないようにMG3で駆動輪5を駆動し、第2クラッチ25が入力軸接続状態のときに変速機10が変速される場合にはMG3で変速時に入力軸11と出力軸12の同期を行う制御装置において、車両1への要求駆動力が判定値以下の場合には第2クラッチ25が出力軸接続状態に切り替えられ、要求駆動力が判定値より大きい場合には第2クラッチ25が入力軸接続状態に切り替えられる。
【解決手段】入力軸11が内燃機関2と接続され、出力軸12が駆動輪5と接続された変速機10と、MG3を入力軸11と接続する入力軸接続状態とMG3を出力軸12と接続する出力軸接続状態とに切り替え可能な第2クラッチ25とを備えた車両1に適用され、第2クラッチ25が出力軸接続状態のときに変速機10が変速される場合には駆動輪5に伝達されるトルクが変動しないようにMG3で駆動輪5を駆動し、第2クラッチ25が入力軸接続状態のときに変速機10が変速される場合にはMG3で変速時に入力軸11と出力軸12の同期を行う制御装置において、車両1への要求駆動力が判定値以下の場合には第2クラッチ25が出力軸接続状態に切り替えられ、要求駆動力が判定値より大きい場合には第2クラッチ25が入力軸接続状態に切り替えられる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、動力源として内燃機関及び電動機が搭載され,内燃機関と駆動輪との間の動力伝達経路中に変速機が設けられ、電動機の接続先を変速機の入力軸又は出力軸に選択的に切り替えることが可能なハイブリッド車両の制御装置に関する。
【背景技術】
【0002】
動力源として内燃機関及びモータ・ジェネレータ等の電動機が搭載されるとともに内燃機関と駆動輪との間の動力伝達経路中に変速機が設けられ、切替機構によりモータ・ジェネレータの出力軸の接続先を変速機の入力軸と変速機の出力軸とに切り替えることが可能なハイブリッド車両が知られている。このようなハイブリッド車両に適用される動力伝達制御装置として、変速機の変速段を切り替える場合にモータ・ジェネレータの出力軸を変速機の出力軸と接続させ、モータ・ジェネレータで駆動輪の駆動をアシストして車両の加速度の急激な変化を低減する装置が知られている(特許文献1参照)。その他、本発明に関連する先行技術文献として特許文献2〜4が存在する。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−241322号公報
【特許文献2】特開2003−335152号公報
【特許文献3】特開2010−241394号公報
【特許文献4】特開2009−274718号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1の装置では、変速段の切替時に車両に対してモータ・ジェネレータの定格出力を超える駆動力が要求されていた場合にはモータ・ジェネレータでのアシストが不十分になるおそれがある。この場合、駆動輪に伝達されるトルクが低下するため、運転者が違和感を覚えるおそれがある。
【0005】
そこで、本発明は、変速段の切替時に運転者が覚える違和感を軽減することが可能なハイブリッド車両の制御装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の制御装置は、動力源として内燃機関及び電動機が搭載され、前記内燃機関とクラッチ手段を介して接続された入力軸と、駆動輪と動力伝達可能に接続された出力軸と、それぞれが一対のギアを有し、前記一対のギアの一方のギアが前記入力軸に設けられるとともに前記一方のギアと噛み合うように前記一対のギアの他方のギアが前記出力軸に設けられ、かつ互いに異なる変速比が設定された複数の変速ギア対と、を含み、前記複数の変速ギア対のうちのいずれか一つの変速ギア対により前記入力軸と前記出力軸との間の回転伝達を選択的に成立させることにより変速段を切り替える変速機と、前記電動機と前記入力軸とが動力伝達可能に接続される入力軸接続状態と、前記電動機と前記出力軸とが動力伝達可能に接続される出力軸接続状態とに切り替え可能な接続先切替手段と、を備えたハイブリッド車両に適用され、前記接続先切替手段が前記出力軸接続状態のときに前記変速機の変速段が切り替えられる場合には前記駆動輪に伝達されるトルクが変動しないように前記電動機で前記駆動輪を駆動し、前記接続先切替手段が前記入力軸接続状態のときに前記変速機の変速段が切り替えられる場合には前記電動機で変速時における前記入力軸と前記出力軸の同期を行う制御手段を備えた制御装置において、前記制御手段は、前記車両に対する要求駆動力が予め設定した所定の判定値以下の場合には前記接続先切替手段を前記出力軸接続状態に切り替え、前記車両に対する要求駆動力が前記判定値より大きい場合には前記接続先切替手段を前記入力軸接続状態に切り替える接続先制御手段を備えている(請求項1)。
【0007】
本発明の制御装置によれば、要求駆動力が判定値以下の場合には電動機を変速機の出力軸に接続するので、変速段の切替時に駆動輪のトルクが変動しないように電動機で駆動輪を駆動する。そのため、運転者が覚える違和感を軽減できる。一方、要求駆動力が判定値より大きい場合には電動機を変速機の入力軸に接続するので、変速段の切替時に電動機で入力軸と出力軸の同期が行われる。そのため、変速段の切り替えに要する時間を短縮できる。この場合、変速段の切替時に駆動輪に伝達されるトルクが低下してもその期間を短縮できる。従って、運転者が覚える違和感を軽減できる。このように本発明によれば、要求駆動力に応じて変速段の変速時における電動機の制御を切り替えることにより運転者が覚える違和感を軽減できる。
【0008】
本発明の制御装置の一形態において、前記判定値には、前記電動機の定格出力以下の値が設定されていてもよい(請求項2)。この形態によれば、変速段の切替時に電動機で駆動輪を駆動する場合に要求駆動力に対して電動機の出力が不足することを防止できる。そのため、変速段の切替時に車両の加速度が急激に低下することを防止できる。
【発明の効果】
【0009】
以上に説明したように、本発明の制御装置によれば、要求駆動力に応じて電動機の接続先を切り替え、変速段の切替時における電動機の制御を変更するので、変速段の変速時に運転者が覚える違和感を軽減できる。
【図面の簡単な説明】
【0010】
【図1】本発明の一形態に係る制御装置が組み込まれた車両を模式的に示す図。
【図2】制御装置が実行するモード切替ルーチンを示すフローチャート。
【図3】制御装置が実行する変速制御ルーチンを示すフローチャート。
【図4】変速トルクアシストモードで変速段を切り替えた場合のドライバ要求トルク、駆動輪エンジントルク及び駆動輪MGトルクの時間変化を示す図。
【図5】回転数同期アシストモードで変速段を切り替えた場合のドライバ要求トルク、駆動輪エンジントルク及び駆動輪MGトルクの時間変化を示す図。
【発明を実施するための形態】
【0011】
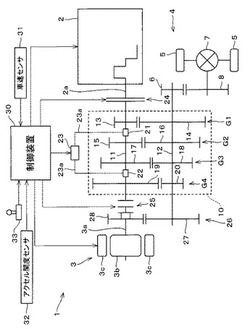
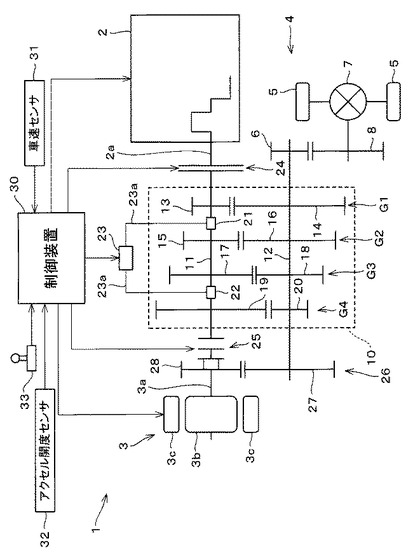
図1は、本発明の一形態に係る制御装置が組み込まれた車両を模式的に示している。この車両1は、動力源として内燃機関(以下、エンジンと称することがある。)2及び電動機としてのモータ・ジェネレータ(以下、MGと略称することがある。)3を備えている。すなわち、この車両1はハイブリッド車両として構成されている。エンジン2は、4つの気筒を有する周知の火花点火式内燃機関である。MG3は、ハイブリッド車両に搭載されて電動機及び発電機として機能する周知のものである。MG3は、ロータ軸3aと一体回転するロータ3bと、ロータ3bの外周に同軸に配置されて不図示のケースに固定されたステータ3cとを備えている。車両1には前進4速の変速機10が搭載され、エンジン2及びMG3は変速機10と接続されている。また、変速機10には、車両1の駆動輪5に動力を出力するための出力部4も接続されている。出力部4は、出力ギア6と、駆動輪5に連結されたデファレンシャル機構7とを備えている。出力ギア6は、変速機10の出力軸12に一体回転するように取り付けられている。また、出力ギア6は、デファレンシャル機構7のケースに設けられたリングギア8と噛み合っている。デファレンシャル機構7は、伝達された動力を左右の駆動輪5に分配する周知のものである。
【0012】
変速機10は、入力軸11と、出力軸12とを備えている。入力軸11と出力軸12との間には、第1〜第4変速ギア対G1〜G4が設けられている。第1変速ギア対G1は互いに噛み合う第1ドライブギア13及び第1ドリブンギア14にて構成され、第2変速ギア対G2は互いに噛み合う第2ドライブギア15及び第2ドリブンギア16にて構成されている。第3変速ギア対G3は互いに噛み合う第3ドライブギア17及び第3ドリブンギア18にて構成され、第4変速ギア対G4は互いに噛み合う第4ドライブギア19及び第4ドリブンギア20にて構成されている。第1〜第4変速ギア対G1〜G4は、ドライブギアとドリブンギアとが常時噛み合うように設けられている。各変速ギア対G1〜G4には互いに異なる変速比が設定されている。変速比は、第1変速ギア対G1、第2変速ギア対G2、第3変速ギア対G3、第4変速ギア対G4の順に小さくなるように設定されている。そのため、第1変速ギア対G1が1速に対応し、第2変速ギア対が2速に対応する。また、第3変速ギア対G3が3速に対応し、第4変速ギア対G4が4速に対応する。
【0013】
第1〜第4ドライブギア13、15、17、19は、入力軸11に対して相対回転可能なように入力軸11に支持されている。そのため、これらドライブギア13、15、17、19が本発明の一方のギアに相当する。この図に示したようにこれらのギアは、第1ドライブギア13、第2ドライブギア15、第3ドライブギア17、第4ドライブギア19の順番で軸線方向に並ぶように配置されている。一方、第1〜第4ドリブンギア14、16、18、20は、出力軸12と一体に回転するように出力軸12に固定されている。そのため、これらドリブンギア14、16、18、20が本発明の他方のギアに相当する。
【0014】
入力軸11には第1スリーブ21及び第2スリーブ22が設けられている。これらのスリーブ21、22は、入力軸11と一体に回転し、かつ軸線方向に移動可能なように入力軸11に支持されている。この図に示すように第1スリーブ21は、第1ドライブギア13と第2ドライブギア15との間に設けられている。第2スリーブ22は、第3ドライブギア17と第4ドライブギア19との間に設けられている。
【0015】
第1スリーブ21は、入力軸11と第1ドライブギア13とが一体に回転するように第1ドライブギア13と噛み合う1速位置と、入力軸11と第2ドライブギア15とが一体に回転するように第2ドライブギア15と噛み合う2速位置と、第1ドライブギア13及び第2ドライブギア15のいずれとも噛み合わない解放位置とに切り替え可能に設けられている。第2スリーブ22は、入力軸11と第3ドライブギア17とが一体に回転するように第3ドライブギア17と噛み合う3速位置と、入力軸11と第4ドライブギア19とが一体に回転するように第4ドライブギア19と噛み合う4速位置と、第3ドライブギア17及び第4ドライブギア19のいずれとも噛み合わない解放位置とに切り替え可能に設けられている。この変速機10では、第1スリーブ21及び第2スリーブ22がいずれも解放位置に切り替えられた場合に入力軸11と出力軸12との間の動力伝達が遮断される。以降、この状態をニュートラル状態と称することがある。変速段を切り替える場合には、変速機10の状態が変速前の状態からまずニュートラル状態に切り替えられる。その後、ニュートラル状態から変速後の状態に切り替えられる。なお、図示は省略したが入力軸11には、第1、第2スリーブ21、22と第1〜第4ドライブギア13、15、17、19とを噛み合わせる際にこれらの回転を同期させる複数のシンクロ機構が設けられている。これらシンクロ機構には、摩擦係合により回転を同期させるシンクロ機構、例えば周知のキー式シンクロメッシュ機構を用いればよい。そのため、シンクロ機構の詳細な説明は省略する。
【0016】
変速機10には、第1スリーブ21及び第2スリーブ22を駆動するためのアクチュエータ23が設けられている。アクチュエータ23は、各スリーブ21、22に係合しているシフトフォーク23aを駆動し、これにより各スリーブ21、22を駆動する。
【0017】
この図に示すように入力軸11には、クラッチ手段としての第1クラッチ24を介してエンジン2の出力軸2aが接続されている。第1クラッチ24は、エンジン2と入力軸11との間で動力が伝達される係合状態と、その動力伝達が遮断される解放状態とに切り替え可能な周知のものである。
【0018】
MG3のロータ軸3aには、接続先切替手段としての第2クラッチ25が設けられている。ロータ軸3aと出力軸12との間には、常時噛み合い式のギア対26が設けられている。ギア対26は、出力軸12に固定された第1ギア27と、ロータ軸3aに設けられて第1ギア27と噛み合う第2ギア28とを備えている。第2クラッチ25は、ロータ軸3aと入力軸11とが動力伝達可能に接続される入力軸接続状態と、ロータ軸3aと出力軸12とがギア対26を介して動力伝達可能に接続される出力軸接続状態と、ロータ軸3aが入力軸11及び出力軸12のいずれとも切り離される解放状態とに切り替え可能に構成されている。第2クラッチ25には、例えばスリーブの位置を変更することにより接続先を切り替え可能な周知のドグクラッチを使用すればよい。
【0019】
エンジン2、MG3、変速機10、第1クラッチ24及び第2クラッチ25の動作は、制御装置30にて制御される。制御装置30は、マイクロプロセッサ及びその動作に必要なRAM、ROM等の周辺機器を含んだコンピュータユニットとして構成されている。制御装置30は、車両1を適切に走行させるための各種制御プログラムを保持している。制御装置30は、これらのプログラムを実行することによりエンジン2、MG3等の制御対象に対する制御を行っている。制御装置30には、車両1に係る情報を取得するための種々のセンサが接続されている。制御装置30には、例えば車両1の速度(車速)に対応した信号を出力する車速センサ31及びアクセル開度に対応した信号を出力するアクセル開度センサ32等が接続されている。この他にも種々のセンサが接続されているが、それらの図示は省略した。また、制御装置30には運転者が操作する種々のスイッチやレバー等が接続されている。制御装置30には、例えば運転者が車両1の走行モードや変速段等を選択するためのシフトレバー33等が接続されている。なお、車両1の走行モードとしては、例えば車両1をMG3のみで走行させるEV走行モード及び車両1をエンジン2で走行させるエンジン走行モード等が設定されている。エンジン走行モードでは、さらに車速及びアクセル開度に基づいて制御装置30が変速段を切り替える自動変速モード及び運転者が変速段を選択するマニュアルモード等が設定されている。なお、マニュアルモードでは運転者はシフトレバー33を操作して変速段を選択する。
【0020】
この車両1では、変速段の切り替えを行う変速モードとして回転数同期アシストモードと変速トルクアシストモードが設けられている。この車両1では、変速段を切り替える場合にまず第1クラッチ24を解放状態に切り替える。続いて第1スリーブ21及び第2スリーブ22をいずれも解放位置に切り替えて変速機10をニュートラル状態にする。次にニュートラル状態において入力軸11と出力軸12の回転の同期を行う。入力軸11と出力軸12が同期した後、各スリーブ21、22を変速後の変速段となる位置に駆動する。その後、第1クラッチ24を係合状態に切り替える。これで変速段の切り替えが完了する。
【0021】
変速トルクアシストモードでは、第1クラッチ24が解放状態のとき及び変速機10がニュートラル状態のときに駆動輪5に伝達されるトルクが変動しないようにMG3で出力軸12を駆動する。一方、回転数同期アシストモードでは、ニュートラル状態のときにMG3で入力軸11の回転数を調整し、速やかに入力軸11と出力軸12の回転を同期させる。そして、これによりニュートラル状態になる期間を短縮する。
【0022】
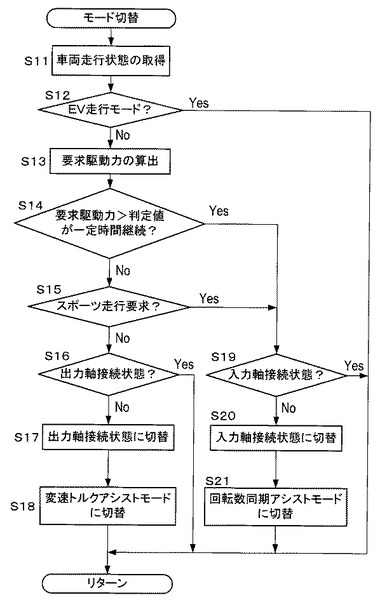
図2は、制御装置30がこれらの変速モードを車両1の走行状態に応じて切り替えるために実行するモード切替ルーチンを示している。この制御ルーチンは、車両1の走行中に所定の周期で繰り返し実行される。
【0023】
このルーチンにおいて制御装置30は、まずステップS11で車両1の走行状態を取得する。車両1の走行状態としては、例えば車速及びアクセル開度等が取得される。次のステップS12において制御装置30は、車両1の走行モードがEV走行モードか否か判定する。走行モードがEV走行モードの場合には今回のルーチンを終了する。一方、走行モードがEV走行モードではないと判定した場合にはステップS13に進み、制御装置30は車両及びアクセル開度に基づいて運転者が車両1に要求している駆動力(要求駆動力)を算出する。次のステップS14において制御装置30は要求駆動力が予め設定した所定の判定値より大きい状態が一定時間継続しているか否か判定する。この判定値は、MG3が変速段の切替時に駆動輪5に伝達されるトルクが変動しないようにトルクを出力できるか否か判定するための基準として設定される。判定値には、例えばMG3の定格出力が設定される。なお、判定値にはMG3の定格出力より小さい値を設定してもよい。
【0024】
要求駆動力が判定値より大きい状態が一定時間継続していないと判定した場合にはステップS15に進み、制御装置30は運転者が車両1に対してスポーツ走行を要求しているか否か判定する。なお、スポーツ走行とは、例えば車両1の加速度や減速度が大きくなる走行や運転者の操作に対して車両の反応が迅速な走行のことである。スポーツ走行を要求しているか否かは、例えば車両1の走行モードやアクセル開度等に基づいて判定すればよい。具体的には、車両1の走行モードがマニュアルモードでアクセル開度が予め設定した閾値より大きい場合等にスポーツ走行が要求されていると判定すればよい。この他にも走行モードとしてスポーツ走行モードが設定され、車両1に運転者がスポーツ走行モードを選択するスイッチが設けられている場合には、例えばそのスイッチにてスポーツ走行モードが選択され、かつアクセル開度が閾値より大きい場合にスポーツ走行が要求されていると判定してもよい。
【0025】
スポーツ走行が要求されていないと判定した場合にはステップS16に進み、制御装置30は第2クラッチ25が出力軸接続状態か否か判定する。第2クラッチ25が出力軸接続状態と判定した場合には、今回のルーチンを終了する。一方、第2クラッチ25が入力軸接続状態又は解放状態と判定した場合にはステップS17に進み、制御装置30は第2クラッチ25を出力軸接続状態に切り替える。次のステップS18において制御装置30は変速モードを変速トルクアシストモードに切り替える。その後、今回のルーチンを終了する。
【0026】
一方、ステップS14が肯定判定された場合又はステップS15が肯定判定された場合にはステップS19に進み、制御装置30は第2クラッチ25が入力軸接続状態か否か判定する。第2クラッチ25が入力軸接続状態と判定した場合には、今回のルーチンを終了する。一方、第2クラッチ25が出力軸接続状態又は解放状態と判定した場合にはステップS20に進み、制御装置30は第2クラッチ25を入力軸接続状態に切り替える。次のステップS21において制御装置30は変速モードを回転数同期アシストモードに切り替える。その後、今回のルーチンを終了する。
【0027】
このように変速モードの切り替えを行うことにより、変速トルクアシストモードの場合にはMG3が出力軸12と接続され、回転数同期アシストモードの場合にはMG3が入力軸11と接続される。なお、図2のルーチンを実行することにより制御装置30が本発明の接続先制御手段として機能する。
【0028】
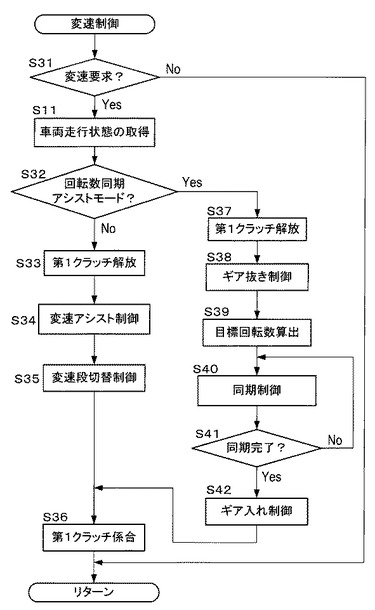
図3は、制御装置30が各変速モードにおいて変速を行うために実行する変速制御ルーチンを示している。この制御ルーチンは車両1の走行中に所定の周期で繰り返し実行される。なお、この制御ルーチンにおいて図2のルーチンと共通の処理には同一の符号を付して説明を省略する。この制御ルーチンを実行することにより制御装置30が本発明の制御手段として機能する。
【0029】
この制御ルーチンにおいて制御装置30は、まずステップS31で変速段の切り替え、すなわち変速が要求されたか否か判定する。なお、変速が要求されたか否かを判定する方法は、自動変速モードとマニュアルモードとで異なる。マニュアルモードの場合には、制御装置30は例えば運転者が変速段を切り替えるべくシフトレバー33を操作した場合に変速が要求されたと判定する。自動変速モードの場合には、制御装置30は例えば現在の車両1の運転状態が現在の変速段が設定されている運転領域から外れた場合に変速が要求されたと判定する。変速が要求されていないと判定した場合には今回の制御ルーチンを終了する。
【0030】
一方、変速が要求されたと判定した場合にはステップS11に進み、制御装置30は車両1の走行状態と取得する。次のステップS32において制御装置30は変速モードが回転数同期アシストモードか否か判定する。変速モードが回転数同期アシストモードではない、すなわち変速トルクアシストモードと判定した場合にはステップS33に進み、制御装置30は第1クラッチ24を解放状態に切り替える。続くステップS34において制御装置30は変速アシスト制御を実行する。この変速アシスト制御では、上述したように変速中に駆動輪5に伝達されるトルクが変動しないようにMG3が制御される。次のステップS35において制御装置30は変速段を切り替える変速段切替制御を実行する。なお、この変速段切替制御ではシンクロ機構にて入力軸11と出力軸12の回転の同期が行われる。また、この変速段切替制御が実行されている間も変速アシスト制御を実行して制御装置30は駆動輪5に伝達されるトルクが変動しないようにMG3を制御する。次のステップS36において制御装置30は第1クラッチ24を係合状態に切り替える。その後、今回の制御ルーチンを終了する。
【0031】
一方、ステップS32が肯定判定された場合にはステップS37に進み、制御装置30は第1クラッチ24を解放状態に切り替える。続くステップS38において制御装置30は変速機10の状態を現在の変速段の状態からニュートラル状態に切り替えるギア抜き制御を実行する。次のステップS39において制御装置30は入力軸11の目標回転数を算出する。目標回転数は、変速後の変速段の変速比及び出力軸12の回転数に基づいて周知の方法で算出すればよい。次のステップS40において制御装置30は、MG3にて入力軸11の回転数を目標回転数に調整する同期制御を実行する。次のステップS41において制御装置30は入力軸11と出力軸12の回転の同期が完了したか否か判定する。回転の同期は、例えば入力軸11の回転数が目標回転数を中心とする所定の許容回転数範囲内にある場合に完了したと判定すればよい。なお、許容回転数範囲は変速機10の状態をニュートラル状態から変速後の変速段の状態に切り替える場合にスリーブをドライブギアと迅速に係合させることが可能なように適宜に設定すればよい。同期が未完了と判定した場合はステップS40に戻る。
【0032】
一方、同期が完了したと判定した場合はステップS42に進み、制御装置30は変速機10の状態をニュートラル状態から変速後の変速段の状態に切り替えるギア入れ制御を実行する。次のステップS36において制御装置30は第1クラッチ24を係合状態に切り替え、その後今回の制御ルーチンを終了する。
【0033】
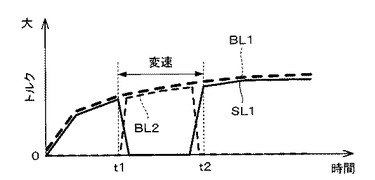
図4は、変速トルクアシストモードで変速段を切り替えた場合のドライバ要求トルク、駆動輪エンジントルク及び駆動輪MGトルクの時間変化を示している。なお、ドライバ要求トルクは運転者が車両1に対して要求しているトルクである。太い破線BL1がドライバ要求トルクを示している。駆動輪エンジントルクは、エンジン2から駆動輪5に伝達されるトルクである。実線SL1が駆動輪エンジントルクを示している。駆動輪MGトルクは、MG3から駆動輪5に伝達されるトルクである。細い破線BL2が駆動輪MGトルクを示している。また、この図では時刻t1において第1クラッチ24が解放状態に切り替えられて変速が開始され、時刻t2において第1クラッチ24が係合状態に切り替えられて変速が完了する。そのため、時刻t1〜t2の間はエンジン2のトルクが出力軸12に伝達されない。
【0034】
変速トルクアシストモードでは、時刻t1において第1クラッチ24が解放されるとMG3で駆動輪5を駆動し、駆動輪5に伝達されるトルクをドライバ要求トルクに調整する。これにより駆動輪5に伝達されるトルクの低下を抑制できるので、変速時の加速度の急激な変化を防止できる。そのため、運転者が覚える違和感を軽減できる。
【0035】
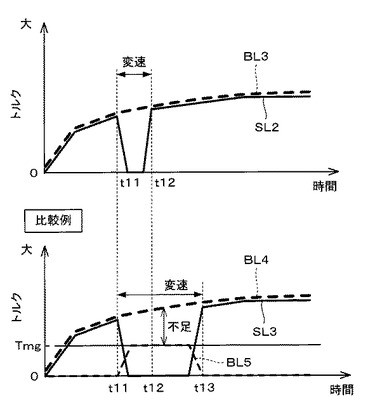
図5は、回転数同期アシストモードで変速段を切り替えた場合のドライバ要求トルク、駆動輪エンジントルク及び駆動輪MGトルクの時間変化を示している。なお、この図では太い破線BL3がドライバ要求トルクを示し、実線SL2が駆動輪エンジントルクを示している。上述したように回転数同期アシストモードは、要求駆動力が判定値よりも大きい場合に選択される。そして、判定値にはMG3の定格出力以下の値が設定される。すなわち、回転数同期アシストモードは要求駆動力がMG3の定格出力よりも大きい場合に選択される。そこで、この図には要求駆動力がMG3の定格出力より大きいときに変速トルクアシストモードで変速段を切り替えた場合のドライバ要求トルク、駆動輪エンジントルク及び駆動輪MGトルクの時間変化を比較例として示した。なお、比較例では太い破線BL4がドライバ要求トルクを示し、実線SL3が駆動輪エンジントルクを示している。また、細い破線BL5が駆動輪MGトルクを示している。この図では時刻t11において第1クラッチ24が解放状態に切り替えられて変速が開始される。そして、時刻t12において第1クラッチ24が係合状態に切り替えられて変速が完了する。時刻t13は、比較例において第1クラッチ24が係合状態に切り替えられて変速が完了した時刻を示している。
【0036】
この図から明らかなように回転数同期アシストモードではMG3にて入力軸11と出力軸12の回転の同期を行うので、変速段を迅速に切り替えることができる。これにより駆動輪5に伝達されるトルクが低下する期間を短縮できるので、運転者が覚える違和感を軽減できる。これに対して比較例に示したように要求駆動力(ドライバ要求トルク)がMG3の定格出力Tmgより大きいときに変速トルクアシストモードで変速段を切り替えると、変速中に駆動輪5に伝達されるトルクがドライバ要求トルクよりも小さくなる。また、回転数同期アシストモードと比較して変速段の切り替えに要する時間が長くなる。そのため、運転者が大きな違和感を覚える。
【0037】
以上に説明したように、本発明によれば、要求駆動力がMG3の定格出力以下の値が設定される判定値以下の場合には第2クラッチ25が出力軸接続状態に切り替えられて変速トルクアシストモードが選択される。これにより変速時に駆動輪5のトルクが低下することを抑制できるので、運転者が覚える違和感を軽減できる。一方、要求駆動力が判定値より大きい場合には第2クラッチ25が入力軸接続状態に切り替えられて回転数同期アシストモードが選択される。これにより変速時に駆動輪5のトルクが低下する期間を短縮できるので、運転者が覚える違和感を軽減できる。このように本発明では、MG3で変速時の駆動輪5のトルクを十分にアシストできない場合でも運転者が覚える違和感を軽減できる。また、本発明によれば変速モードを切り替えることにより運転者が覚える違和感を軽減するので、MG3の定格出力を抑えることができる。そのため、MG3の大型化やコストの増加を抑制できる。
【0038】
本発明は、上述した形態に限定されることなく、種々の形態にて実施することができる。例えば、本発明が適用される車両の変速機は前進の最高段が4速の変速機に限定されない。例えば前進の最高段が3速又は5速以上の変速機であってもよい。また、複数のスリーブは全て入力軸に設けられていなくてもよい。例えば、複数のスリーブが全て出力軸に設けられていてもよいし、複数のスリーブの一部が入力軸に設けられ、残りのスリーブが出力軸に設けられていてもよい。
【符号の説明】
【0039】
1 車両
2 内燃機関
3 モータ・ジェネレータ(電動機)
5 駆動輪
10 変速機
11 入力軸
12 出力軸
13 第1ドライブギア(一方のギア)
14 第1ドリブンギア(他方のギア)
15 第2ドライブギア(一方のギア)
16 第2ドリブンギア(他方のギア)
17 第3ドライブギア(一方のギア)
18 第3ドリブンギア(他方のギア)
19 第4ドライブギア(一方のギア)
20 第4ドリブンギア(他方のギア)
24 第1クラッチ(クラッチ手段)
25 第2クラッチ(接続先切替手段)
30 制御装置(制御手段、接続先制御手段)
G1〜G4 第1〜第4変速ギア対
【技術分野】
【0001】
本発明は、動力源として内燃機関及び電動機が搭載され,内燃機関と駆動輪との間の動力伝達経路中に変速機が設けられ、電動機の接続先を変速機の入力軸又は出力軸に選択的に切り替えることが可能なハイブリッド車両の制御装置に関する。
【背景技術】
【0002】
動力源として内燃機関及びモータ・ジェネレータ等の電動機が搭載されるとともに内燃機関と駆動輪との間の動力伝達経路中に変速機が設けられ、切替機構によりモータ・ジェネレータの出力軸の接続先を変速機の入力軸と変速機の出力軸とに切り替えることが可能なハイブリッド車両が知られている。このようなハイブリッド車両に適用される動力伝達制御装置として、変速機の変速段を切り替える場合にモータ・ジェネレータの出力軸を変速機の出力軸と接続させ、モータ・ジェネレータで駆動輪の駆動をアシストして車両の加速度の急激な変化を低減する装置が知られている(特許文献1参照)。その他、本発明に関連する先行技術文献として特許文献2〜4が存在する。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−241322号公報
【特許文献2】特開2003−335152号公報
【特許文献3】特開2010−241394号公報
【特許文献4】特開2009−274718号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1の装置では、変速段の切替時に車両に対してモータ・ジェネレータの定格出力を超える駆動力が要求されていた場合にはモータ・ジェネレータでのアシストが不十分になるおそれがある。この場合、駆動輪に伝達されるトルクが低下するため、運転者が違和感を覚えるおそれがある。
【0005】
そこで、本発明は、変速段の切替時に運転者が覚える違和感を軽減することが可能なハイブリッド車両の制御装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の制御装置は、動力源として内燃機関及び電動機が搭載され、前記内燃機関とクラッチ手段を介して接続された入力軸と、駆動輪と動力伝達可能に接続された出力軸と、それぞれが一対のギアを有し、前記一対のギアの一方のギアが前記入力軸に設けられるとともに前記一方のギアと噛み合うように前記一対のギアの他方のギアが前記出力軸に設けられ、かつ互いに異なる変速比が設定された複数の変速ギア対と、を含み、前記複数の変速ギア対のうちのいずれか一つの変速ギア対により前記入力軸と前記出力軸との間の回転伝達を選択的に成立させることにより変速段を切り替える変速機と、前記電動機と前記入力軸とが動力伝達可能に接続される入力軸接続状態と、前記電動機と前記出力軸とが動力伝達可能に接続される出力軸接続状態とに切り替え可能な接続先切替手段と、を備えたハイブリッド車両に適用され、前記接続先切替手段が前記出力軸接続状態のときに前記変速機の変速段が切り替えられる場合には前記駆動輪に伝達されるトルクが変動しないように前記電動機で前記駆動輪を駆動し、前記接続先切替手段が前記入力軸接続状態のときに前記変速機の変速段が切り替えられる場合には前記電動機で変速時における前記入力軸と前記出力軸の同期を行う制御手段を備えた制御装置において、前記制御手段は、前記車両に対する要求駆動力が予め設定した所定の判定値以下の場合には前記接続先切替手段を前記出力軸接続状態に切り替え、前記車両に対する要求駆動力が前記判定値より大きい場合には前記接続先切替手段を前記入力軸接続状態に切り替える接続先制御手段を備えている(請求項1)。
【0007】
本発明の制御装置によれば、要求駆動力が判定値以下の場合には電動機を変速機の出力軸に接続するので、変速段の切替時に駆動輪のトルクが変動しないように電動機で駆動輪を駆動する。そのため、運転者が覚える違和感を軽減できる。一方、要求駆動力が判定値より大きい場合には電動機を変速機の入力軸に接続するので、変速段の切替時に電動機で入力軸と出力軸の同期が行われる。そのため、変速段の切り替えに要する時間を短縮できる。この場合、変速段の切替時に駆動輪に伝達されるトルクが低下してもその期間を短縮できる。従って、運転者が覚える違和感を軽減できる。このように本発明によれば、要求駆動力に応じて変速段の変速時における電動機の制御を切り替えることにより運転者が覚える違和感を軽減できる。
【0008】
本発明の制御装置の一形態において、前記判定値には、前記電動機の定格出力以下の値が設定されていてもよい(請求項2)。この形態によれば、変速段の切替時に電動機で駆動輪を駆動する場合に要求駆動力に対して電動機の出力が不足することを防止できる。そのため、変速段の切替時に車両の加速度が急激に低下することを防止できる。
【発明の効果】
【0009】
以上に説明したように、本発明の制御装置によれば、要求駆動力に応じて電動機の接続先を切り替え、変速段の切替時における電動機の制御を変更するので、変速段の変速時に運転者が覚える違和感を軽減できる。
【図面の簡単な説明】
【0010】
【図1】本発明の一形態に係る制御装置が組み込まれた車両を模式的に示す図。
【図2】制御装置が実行するモード切替ルーチンを示すフローチャート。
【図3】制御装置が実行する変速制御ルーチンを示すフローチャート。
【図4】変速トルクアシストモードで変速段を切り替えた場合のドライバ要求トルク、駆動輪エンジントルク及び駆動輪MGトルクの時間変化を示す図。
【図5】回転数同期アシストモードで変速段を切り替えた場合のドライバ要求トルク、駆動輪エンジントルク及び駆動輪MGトルクの時間変化を示す図。
【発明を実施するための形態】
【0011】
図1は、本発明の一形態に係る制御装置が組み込まれた車両を模式的に示している。この車両1は、動力源として内燃機関(以下、エンジンと称することがある。)2及び電動機としてのモータ・ジェネレータ(以下、MGと略称することがある。)3を備えている。すなわち、この車両1はハイブリッド車両として構成されている。エンジン2は、4つの気筒を有する周知の火花点火式内燃機関である。MG3は、ハイブリッド車両に搭載されて電動機及び発電機として機能する周知のものである。MG3は、ロータ軸3aと一体回転するロータ3bと、ロータ3bの外周に同軸に配置されて不図示のケースに固定されたステータ3cとを備えている。車両1には前進4速の変速機10が搭載され、エンジン2及びMG3は変速機10と接続されている。また、変速機10には、車両1の駆動輪5に動力を出力するための出力部4も接続されている。出力部4は、出力ギア6と、駆動輪5に連結されたデファレンシャル機構7とを備えている。出力ギア6は、変速機10の出力軸12に一体回転するように取り付けられている。また、出力ギア6は、デファレンシャル機構7のケースに設けられたリングギア8と噛み合っている。デファレンシャル機構7は、伝達された動力を左右の駆動輪5に分配する周知のものである。
【0012】
変速機10は、入力軸11と、出力軸12とを備えている。入力軸11と出力軸12との間には、第1〜第4変速ギア対G1〜G4が設けられている。第1変速ギア対G1は互いに噛み合う第1ドライブギア13及び第1ドリブンギア14にて構成され、第2変速ギア対G2は互いに噛み合う第2ドライブギア15及び第2ドリブンギア16にて構成されている。第3変速ギア対G3は互いに噛み合う第3ドライブギア17及び第3ドリブンギア18にて構成され、第4変速ギア対G4は互いに噛み合う第4ドライブギア19及び第4ドリブンギア20にて構成されている。第1〜第4変速ギア対G1〜G4は、ドライブギアとドリブンギアとが常時噛み合うように設けられている。各変速ギア対G1〜G4には互いに異なる変速比が設定されている。変速比は、第1変速ギア対G1、第2変速ギア対G2、第3変速ギア対G3、第4変速ギア対G4の順に小さくなるように設定されている。そのため、第1変速ギア対G1が1速に対応し、第2変速ギア対が2速に対応する。また、第3変速ギア対G3が3速に対応し、第4変速ギア対G4が4速に対応する。
【0013】
第1〜第4ドライブギア13、15、17、19は、入力軸11に対して相対回転可能なように入力軸11に支持されている。そのため、これらドライブギア13、15、17、19が本発明の一方のギアに相当する。この図に示したようにこれらのギアは、第1ドライブギア13、第2ドライブギア15、第3ドライブギア17、第4ドライブギア19の順番で軸線方向に並ぶように配置されている。一方、第1〜第4ドリブンギア14、16、18、20は、出力軸12と一体に回転するように出力軸12に固定されている。そのため、これらドリブンギア14、16、18、20が本発明の他方のギアに相当する。
【0014】
入力軸11には第1スリーブ21及び第2スリーブ22が設けられている。これらのスリーブ21、22は、入力軸11と一体に回転し、かつ軸線方向に移動可能なように入力軸11に支持されている。この図に示すように第1スリーブ21は、第1ドライブギア13と第2ドライブギア15との間に設けられている。第2スリーブ22は、第3ドライブギア17と第4ドライブギア19との間に設けられている。
【0015】
第1スリーブ21は、入力軸11と第1ドライブギア13とが一体に回転するように第1ドライブギア13と噛み合う1速位置と、入力軸11と第2ドライブギア15とが一体に回転するように第2ドライブギア15と噛み合う2速位置と、第1ドライブギア13及び第2ドライブギア15のいずれとも噛み合わない解放位置とに切り替え可能に設けられている。第2スリーブ22は、入力軸11と第3ドライブギア17とが一体に回転するように第3ドライブギア17と噛み合う3速位置と、入力軸11と第4ドライブギア19とが一体に回転するように第4ドライブギア19と噛み合う4速位置と、第3ドライブギア17及び第4ドライブギア19のいずれとも噛み合わない解放位置とに切り替え可能に設けられている。この変速機10では、第1スリーブ21及び第2スリーブ22がいずれも解放位置に切り替えられた場合に入力軸11と出力軸12との間の動力伝達が遮断される。以降、この状態をニュートラル状態と称することがある。変速段を切り替える場合には、変速機10の状態が変速前の状態からまずニュートラル状態に切り替えられる。その後、ニュートラル状態から変速後の状態に切り替えられる。なお、図示は省略したが入力軸11には、第1、第2スリーブ21、22と第1〜第4ドライブギア13、15、17、19とを噛み合わせる際にこれらの回転を同期させる複数のシンクロ機構が設けられている。これらシンクロ機構には、摩擦係合により回転を同期させるシンクロ機構、例えば周知のキー式シンクロメッシュ機構を用いればよい。そのため、シンクロ機構の詳細な説明は省略する。
【0016】
変速機10には、第1スリーブ21及び第2スリーブ22を駆動するためのアクチュエータ23が設けられている。アクチュエータ23は、各スリーブ21、22に係合しているシフトフォーク23aを駆動し、これにより各スリーブ21、22を駆動する。
【0017】
この図に示すように入力軸11には、クラッチ手段としての第1クラッチ24を介してエンジン2の出力軸2aが接続されている。第1クラッチ24は、エンジン2と入力軸11との間で動力が伝達される係合状態と、その動力伝達が遮断される解放状態とに切り替え可能な周知のものである。
【0018】
MG3のロータ軸3aには、接続先切替手段としての第2クラッチ25が設けられている。ロータ軸3aと出力軸12との間には、常時噛み合い式のギア対26が設けられている。ギア対26は、出力軸12に固定された第1ギア27と、ロータ軸3aに設けられて第1ギア27と噛み合う第2ギア28とを備えている。第2クラッチ25は、ロータ軸3aと入力軸11とが動力伝達可能に接続される入力軸接続状態と、ロータ軸3aと出力軸12とがギア対26を介して動力伝達可能に接続される出力軸接続状態と、ロータ軸3aが入力軸11及び出力軸12のいずれとも切り離される解放状態とに切り替え可能に構成されている。第2クラッチ25には、例えばスリーブの位置を変更することにより接続先を切り替え可能な周知のドグクラッチを使用すればよい。
【0019】
エンジン2、MG3、変速機10、第1クラッチ24及び第2クラッチ25の動作は、制御装置30にて制御される。制御装置30は、マイクロプロセッサ及びその動作に必要なRAM、ROM等の周辺機器を含んだコンピュータユニットとして構成されている。制御装置30は、車両1を適切に走行させるための各種制御プログラムを保持している。制御装置30は、これらのプログラムを実行することによりエンジン2、MG3等の制御対象に対する制御を行っている。制御装置30には、車両1に係る情報を取得するための種々のセンサが接続されている。制御装置30には、例えば車両1の速度(車速)に対応した信号を出力する車速センサ31及びアクセル開度に対応した信号を出力するアクセル開度センサ32等が接続されている。この他にも種々のセンサが接続されているが、それらの図示は省略した。また、制御装置30には運転者が操作する種々のスイッチやレバー等が接続されている。制御装置30には、例えば運転者が車両1の走行モードや変速段等を選択するためのシフトレバー33等が接続されている。なお、車両1の走行モードとしては、例えば車両1をMG3のみで走行させるEV走行モード及び車両1をエンジン2で走行させるエンジン走行モード等が設定されている。エンジン走行モードでは、さらに車速及びアクセル開度に基づいて制御装置30が変速段を切り替える自動変速モード及び運転者が変速段を選択するマニュアルモード等が設定されている。なお、マニュアルモードでは運転者はシフトレバー33を操作して変速段を選択する。
【0020】
この車両1では、変速段の切り替えを行う変速モードとして回転数同期アシストモードと変速トルクアシストモードが設けられている。この車両1では、変速段を切り替える場合にまず第1クラッチ24を解放状態に切り替える。続いて第1スリーブ21及び第2スリーブ22をいずれも解放位置に切り替えて変速機10をニュートラル状態にする。次にニュートラル状態において入力軸11と出力軸12の回転の同期を行う。入力軸11と出力軸12が同期した後、各スリーブ21、22を変速後の変速段となる位置に駆動する。その後、第1クラッチ24を係合状態に切り替える。これで変速段の切り替えが完了する。
【0021】
変速トルクアシストモードでは、第1クラッチ24が解放状態のとき及び変速機10がニュートラル状態のときに駆動輪5に伝達されるトルクが変動しないようにMG3で出力軸12を駆動する。一方、回転数同期アシストモードでは、ニュートラル状態のときにMG3で入力軸11の回転数を調整し、速やかに入力軸11と出力軸12の回転を同期させる。そして、これによりニュートラル状態になる期間を短縮する。
【0022】
図2は、制御装置30がこれらの変速モードを車両1の走行状態に応じて切り替えるために実行するモード切替ルーチンを示している。この制御ルーチンは、車両1の走行中に所定の周期で繰り返し実行される。
【0023】
このルーチンにおいて制御装置30は、まずステップS11で車両1の走行状態を取得する。車両1の走行状態としては、例えば車速及びアクセル開度等が取得される。次のステップS12において制御装置30は、車両1の走行モードがEV走行モードか否か判定する。走行モードがEV走行モードの場合には今回のルーチンを終了する。一方、走行モードがEV走行モードではないと判定した場合にはステップS13に進み、制御装置30は車両及びアクセル開度に基づいて運転者が車両1に要求している駆動力(要求駆動力)を算出する。次のステップS14において制御装置30は要求駆動力が予め設定した所定の判定値より大きい状態が一定時間継続しているか否か判定する。この判定値は、MG3が変速段の切替時に駆動輪5に伝達されるトルクが変動しないようにトルクを出力できるか否か判定するための基準として設定される。判定値には、例えばMG3の定格出力が設定される。なお、判定値にはMG3の定格出力より小さい値を設定してもよい。
【0024】
要求駆動力が判定値より大きい状態が一定時間継続していないと判定した場合にはステップS15に進み、制御装置30は運転者が車両1に対してスポーツ走行を要求しているか否か判定する。なお、スポーツ走行とは、例えば車両1の加速度や減速度が大きくなる走行や運転者の操作に対して車両の反応が迅速な走行のことである。スポーツ走行を要求しているか否かは、例えば車両1の走行モードやアクセル開度等に基づいて判定すればよい。具体的には、車両1の走行モードがマニュアルモードでアクセル開度が予め設定した閾値より大きい場合等にスポーツ走行が要求されていると判定すればよい。この他にも走行モードとしてスポーツ走行モードが設定され、車両1に運転者がスポーツ走行モードを選択するスイッチが設けられている場合には、例えばそのスイッチにてスポーツ走行モードが選択され、かつアクセル開度が閾値より大きい場合にスポーツ走行が要求されていると判定してもよい。
【0025】
スポーツ走行が要求されていないと判定した場合にはステップS16に進み、制御装置30は第2クラッチ25が出力軸接続状態か否か判定する。第2クラッチ25が出力軸接続状態と判定した場合には、今回のルーチンを終了する。一方、第2クラッチ25が入力軸接続状態又は解放状態と判定した場合にはステップS17に進み、制御装置30は第2クラッチ25を出力軸接続状態に切り替える。次のステップS18において制御装置30は変速モードを変速トルクアシストモードに切り替える。その後、今回のルーチンを終了する。
【0026】
一方、ステップS14が肯定判定された場合又はステップS15が肯定判定された場合にはステップS19に進み、制御装置30は第2クラッチ25が入力軸接続状態か否か判定する。第2クラッチ25が入力軸接続状態と判定した場合には、今回のルーチンを終了する。一方、第2クラッチ25が出力軸接続状態又は解放状態と判定した場合にはステップS20に進み、制御装置30は第2クラッチ25を入力軸接続状態に切り替える。次のステップS21において制御装置30は変速モードを回転数同期アシストモードに切り替える。その後、今回のルーチンを終了する。
【0027】
このように変速モードの切り替えを行うことにより、変速トルクアシストモードの場合にはMG3が出力軸12と接続され、回転数同期アシストモードの場合にはMG3が入力軸11と接続される。なお、図2のルーチンを実行することにより制御装置30が本発明の接続先制御手段として機能する。
【0028】
図3は、制御装置30が各変速モードにおいて変速を行うために実行する変速制御ルーチンを示している。この制御ルーチンは車両1の走行中に所定の周期で繰り返し実行される。なお、この制御ルーチンにおいて図2のルーチンと共通の処理には同一の符号を付して説明を省略する。この制御ルーチンを実行することにより制御装置30が本発明の制御手段として機能する。
【0029】
この制御ルーチンにおいて制御装置30は、まずステップS31で変速段の切り替え、すなわち変速が要求されたか否か判定する。なお、変速が要求されたか否かを判定する方法は、自動変速モードとマニュアルモードとで異なる。マニュアルモードの場合には、制御装置30は例えば運転者が変速段を切り替えるべくシフトレバー33を操作した場合に変速が要求されたと判定する。自動変速モードの場合には、制御装置30は例えば現在の車両1の運転状態が現在の変速段が設定されている運転領域から外れた場合に変速が要求されたと判定する。変速が要求されていないと判定した場合には今回の制御ルーチンを終了する。
【0030】
一方、変速が要求されたと判定した場合にはステップS11に進み、制御装置30は車両1の走行状態と取得する。次のステップS32において制御装置30は変速モードが回転数同期アシストモードか否か判定する。変速モードが回転数同期アシストモードではない、すなわち変速トルクアシストモードと判定した場合にはステップS33に進み、制御装置30は第1クラッチ24を解放状態に切り替える。続くステップS34において制御装置30は変速アシスト制御を実行する。この変速アシスト制御では、上述したように変速中に駆動輪5に伝達されるトルクが変動しないようにMG3が制御される。次のステップS35において制御装置30は変速段を切り替える変速段切替制御を実行する。なお、この変速段切替制御ではシンクロ機構にて入力軸11と出力軸12の回転の同期が行われる。また、この変速段切替制御が実行されている間も変速アシスト制御を実行して制御装置30は駆動輪5に伝達されるトルクが変動しないようにMG3を制御する。次のステップS36において制御装置30は第1クラッチ24を係合状態に切り替える。その後、今回の制御ルーチンを終了する。
【0031】
一方、ステップS32が肯定判定された場合にはステップS37に進み、制御装置30は第1クラッチ24を解放状態に切り替える。続くステップS38において制御装置30は変速機10の状態を現在の変速段の状態からニュートラル状態に切り替えるギア抜き制御を実行する。次のステップS39において制御装置30は入力軸11の目標回転数を算出する。目標回転数は、変速後の変速段の変速比及び出力軸12の回転数に基づいて周知の方法で算出すればよい。次のステップS40において制御装置30は、MG3にて入力軸11の回転数を目標回転数に調整する同期制御を実行する。次のステップS41において制御装置30は入力軸11と出力軸12の回転の同期が完了したか否か判定する。回転の同期は、例えば入力軸11の回転数が目標回転数を中心とする所定の許容回転数範囲内にある場合に完了したと判定すればよい。なお、許容回転数範囲は変速機10の状態をニュートラル状態から変速後の変速段の状態に切り替える場合にスリーブをドライブギアと迅速に係合させることが可能なように適宜に設定すればよい。同期が未完了と判定した場合はステップS40に戻る。
【0032】
一方、同期が完了したと判定した場合はステップS42に進み、制御装置30は変速機10の状態をニュートラル状態から変速後の変速段の状態に切り替えるギア入れ制御を実行する。次のステップS36において制御装置30は第1クラッチ24を係合状態に切り替え、その後今回の制御ルーチンを終了する。
【0033】
図4は、変速トルクアシストモードで変速段を切り替えた場合のドライバ要求トルク、駆動輪エンジントルク及び駆動輪MGトルクの時間変化を示している。なお、ドライバ要求トルクは運転者が車両1に対して要求しているトルクである。太い破線BL1がドライバ要求トルクを示している。駆動輪エンジントルクは、エンジン2から駆動輪5に伝達されるトルクである。実線SL1が駆動輪エンジントルクを示している。駆動輪MGトルクは、MG3から駆動輪5に伝達されるトルクである。細い破線BL2が駆動輪MGトルクを示している。また、この図では時刻t1において第1クラッチ24が解放状態に切り替えられて変速が開始され、時刻t2において第1クラッチ24が係合状態に切り替えられて変速が完了する。そのため、時刻t1〜t2の間はエンジン2のトルクが出力軸12に伝達されない。
【0034】
変速トルクアシストモードでは、時刻t1において第1クラッチ24が解放されるとMG3で駆動輪5を駆動し、駆動輪5に伝達されるトルクをドライバ要求トルクに調整する。これにより駆動輪5に伝達されるトルクの低下を抑制できるので、変速時の加速度の急激な変化を防止できる。そのため、運転者が覚える違和感を軽減できる。
【0035】
図5は、回転数同期アシストモードで変速段を切り替えた場合のドライバ要求トルク、駆動輪エンジントルク及び駆動輪MGトルクの時間変化を示している。なお、この図では太い破線BL3がドライバ要求トルクを示し、実線SL2が駆動輪エンジントルクを示している。上述したように回転数同期アシストモードは、要求駆動力が判定値よりも大きい場合に選択される。そして、判定値にはMG3の定格出力以下の値が設定される。すなわち、回転数同期アシストモードは要求駆動力がMG3の定格出力よりも大きい場合に選択される。そこで、この図には要求駆動力がMG3の定格出力より大きいときに変速トルクアシストモードで変速段を切り替えた場合のドライバ要求トルク、駆動輪エンジントルク及び駆動輪MGトルクの時間変化を比較例として示した。なお、比較例では太い破線BL4がドライバ要求トルクを示し、実線SL3が駆動輪エンジントルクを示している。また、細い破線BL5が駆動輪MGトルクを示している。この図では時刻t11において第1クラッチ24が解放状態に切り替えられて変速が開始される。そして、時刻t12において第1クラッチ24が係合状態に切り替えられて変速が完了する。時刻t13は、比較例において第1クラッチ24が係合状態に切り替えられて変速が完了した時刻を示している。
【0036】
この図から明らかなように回転数同期アシストモードではMG3にて入力軸11と出力軸12の回転の同期を行うので、変速段を迅速に切り替えることができる。これにより駆動輪5に伝達されるトルクが低下する期間を短縮できるので、運転者が覚える違和感を軽減できる。これに対して比較例に示したように要求駆動力(ドライバ要求トルク)がMG3の定格出力Tmgより大きいときに変速トルクアシストモードで変速段を切り替えると、変速中に駆動輪5に伝達されるトルクがドライバ要求トルクよりも小さくなる。また、回転数同期アシストモードと比較して変速段の切り替えに要する時間が長くなる。そのため、運転者が大きな違和感を覚える。
【0037】
以上に説明したように、本発明によれば、要求駆動力がMG3の定格出力以下の値が設定される判定値以下の場合には第2クラッチ25が出力軸接続状態に切り替えられて変速トルクアシストモードが選択される。これにより変速時に駆動輪5のトルクが低下することを抑制できるので、運転者が覚える違和感を軽減できる。一方、要求駆動力が判定値より大きい場合には第2クラッチ25が入力軸接続状態に切り替えられて回転数同期アシストモードが選択される。これにより変速時に駆動輪5のトルクが低下する期間を短縮できるので、運転者が覚える違和感を軽減できる。このように本発明では、MG3で変速時の駆動輪5のトルクを十分にアシストできない場合でも運転者が覚える違和感を軽減できる。また、本発明によれば変速モードを切り替えることにより運転者が覚える違和感を軽減するので、MG3の定格出力を抑えることができる。そのため、MG3の大型化やコストの増加を抑制できる。
【0038】
本発明は、上述した形態に限定されることなく、種々の形態にて実施することができる。例えば、本発明が適用される車両の変速機は前進の最高段が4速の変速機に限定されない。例えば前進の最高段が3速又は5速以上の変速機であってもよい。また、複数のスリーブは全て入力軸に設けられていなくてもよい。例えば、複数のスリーブが全て出力軸に設けられていてもよいし、複数のスリーブの一部が入力軸に設けられ、残りのスリーブが出力軸に設けられていてもよい。
【符号の説明】
【0039】
1 車両
2 内燃機関
3 モータ・ジェネレータ(電動機)
5 駆動輪
10 変速機
11 入力軸
12 出力軸
13 第1ドライブギア(一方のギア)
14 第1ドリブンギア(他方のギア)
15 第2ドライブギア(一方のギア)
16 第2ドリブンギア(他方のギア)
17 第3ドライブギア(一方のギア)
18 第3ドリブンギア(他方のギア)
19 第4ドライブギア(一方のギア)
20 第4ドリブンギア(他方のギア)
24 第1クラッチ(クラッチ手段)
25 第2クラッチ(接続先切替手段)
30 制御装置(制御手段、接続先制御手段)
G1〜G4 第1〜第4変速ギア対
【特許請求の範囲】
【請求項1】
動力源として内燃機関及び電動機が搭載され、
前記内燃機関とクラッチ手段を介して接続された入力軸と、駆動輪と動力伝達可能に接続された出力軸と、それぞれが一対のギアを有し、前記一対のギアの一方のギアが前記入力軸に設けられるとともに前記一方のギアと噛み合うように前記一対のギアの他方のギアが前記出力軸に設けられ、かつ互いに異なる変速比が設定された複数の変速ギア対と、を含み、前記複数の変速ギア対のうちのいずれか一つの変速ギア対により前記入力軸と前記出力軸との間の回転伝達を選択的に成立させることにより変速段を切り替える変速機と、
前記電動機と前記入力軸とが動力伝達可能に接続される入力軸接続状態と、前記電動機と前記出力軸とが動力伝達可能に接続される出力軸接続状態とに切り替え可能な接続先切替手段と、を備えたハイブリッド車両に適用され、
前記接続先切替手段が前記出力軸接続状態のときに前記変速機の変速段が切り替えられる場合には前記駆動輪に伝達されるトルクが変動しないように前記電動機で前記駆動輪を駆動し、前記接続先切替手段が前記入力軸接続状態のときに前記変速機の変速段が切り替えられる場合には前記電動機で変速時における前記入力軸と前記出力軸の同期を行う制御手段を備えた制御装置において、
前記制御手段は、前記車両に対する要求駆動力が予め設定した所定の判定値以下の場合には前記接続先切替手段を前記出力軸接続状態に切り替え、前記車両に対する要求駆動力が前記判定値より大きい場合には前記接続先切替手段を前記入力軸接続状態に切り替える接続先制御手段を備えている制御装置。
【請求項2】
前記判定値には、前記電動機の定格出力以下の値が設定されている請求項1に記載の制御装置。
【請求項1】
動力源として内燃機関及び電動機が搭載され、
前記内燃機関とクラッチ手段を介して接続された入力軸と、駆動輪と動力伝達可能に接続された出力軸と、それぞれが一対のギアを有し、前記一対のギアの一方のギアが前記入力軸に設けられるとともに前記一方のギアと噛み合うように前記一対のギアの他方のギアが前記出力軸に設けられ、かつ互いに異なる変速比が設定された複数の変速ギア対と、を含み、前記複数の変速ギア対のうちのいずれか一つの変速ギア対により前記入力軸と前記出力軸との間の回転伝達を選択的に成立させることにより変速段を切り替える変速機と、
前記電動機と前記入力軸とが動力伝達可能に接続される入力軸接続状態と、前記電動機と前記出力軸とが動力伝達可能に接続される出力軸接続状態とに切り替え可能な接続先切替手段と、を備えたハイブリッド車両に適用され、
前記接続先切替手段が前記出力軸接続状態のときに前記変速機の変速段が切り替えられる場合には前記駆動輪に伝達されるトルクが変動しないように前記電動機で前記駆動輪を駆動し、前記接続先切替手段が前記入力軸接続状態のときに前記変速機の変速段が切り替えられる場合には前記電動機で変速時における前記入力軸と前記出力軸の同期を行う制御手段を備えた制御装置において、
前記制御手段は、前記車両に対する要求駆動力が予め設定した所定の判定値以下の場合には前記接続先切替手段を前記出力軸接続状態に切り替え、前記車両に対する要求駆動力が前記判定値より大きい場合には前記接続先切替手段を前記入力軸接続状態に切り替える接続先制御手段を備えている制御装置。
【請求項2】
前記判定値には、前記電動機の定格出力以下の値が設定されている請求項1に記載の制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2013−107532(P2013−107532A)
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願番号】特願2011−255199(P2011−255199)
【出願日】平成23年11月22日(2011.11.22)
【特許番号】特許第5198645号(P5198645)
【特許公報発行日】平成25年5月15日(2013.5.15)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【出願人】(000000011)アイシン精機株式会社 (5,421)
【出願人】(592058315)アイシン・エーアイ株式会社 (490)
【Fターム(参考)】
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願日】平成23年11月22日(2011.11.22)
【特許番号】特許第5198645号(P5198645)
【特許公報発行日】平成25年5月15日(2013.5.15)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【出願人】(000000011)アイシン精機株式会社 (5,421)
【出願人】(592058315)アイシン・エーアイ株式会社 (490)
【Fターム(参考)】
[ Back to top ]