
ハイブリッド車両の制御装置
【課題】過大な電流が流れることによるインバータ回路の破壊を防止できる、ハイブリッド車両の制御装置を提供する。
【解決手段】インバータ回路23からモータジェネレータ3に流れる交流電流の電流値の絶対値が所定の閾値以上に上昇すると、モータジェネレータ3の駆動の制御(モータ制御)が停止される。これにより、インバータ回路23からモータジェネレータ3に過大な電流が流れることを防止できる。また、クラッチ8が接続状態から切断状態に切り替えられ、モータジェネレータ3と駆動軸4とが機械的に切り離される。これにより、モータ制御の停止後、モータジェネレータ3の回転と無関係に、エンジン2の駆動の制御を続けることができる。
【解決手段】インバータ回路23からモータジェネレータ3に流れる交流電流の電流値の絶対値が所定の閾値以上に上昇すると、モータジェネレータ3の駆動の制御(モータ制御)が停止される。これにより、インバータ回路23からモータジェネレータ3に過大な電流が流れることを防止できる。また、クラッチ8が接続状態から切断状態に切り替えられ、モータジェネレータ3と駆動軸4とが機械的に切り離される。これにより、モータ制御の停止後、モータジェネレータ3の回転と無関係に、エンジン2の駆動の制御を続けることができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ハイブリッド車両の制御装置に関する。
【背景技術】
【0002】
ハイブリッドカーには、たとえば、エンジンおよびモータが駆動源として搭載されている。
【0003】
エンジンおよびモータの駆動は、電子制御ユニットによって制御される。具体的には、電子制御ユニットにおいて、アクセルペダルの操作量などに基づいて、エンジンの出力トルク目標値が設定されるとともに、モータの出力トルクの目標値が設定される。そして、電子制御ユニットにより、エンジンの出力トルクの目標値などに基づいて、エンジンの駆動が制御される。また、電子制御ユニットにより、モータの出力トルクの目標値などに基づいて、モータに接続されたインバータが制御される。
【0004】
モータの制御中に、モータの回転数(回転速度)などが過渡変化する場合がある。たとえば、モータの回転数が上昇すると、それに伴って、モータで発生する誘起電圧が上昇する。誘起電圧がインバータからモータに供給可能な電圧を上回ると、モータの制御が破綻する(不能となる)。
【0005】
そこで、モータの回転数などが過渡変化した場合にも、モータを安定して制御するために、モータの出力トルクおよび回転数の目標値などに基づいて生成される電圧指令値がインバータから出力可能な最大電圧値を超えたときに、電圧指令値を最大電圧値以下に補正することが提案されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2000−358393号公報
【特許文献2】特開2003−191762号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
ところが、電圧指令値の補正が間に合わず、インバータの破壊を生じるような過大な電流がインバータからモータに流れるおそれがある。たとえば、ハイブリッドカーの駆動輪がスリップすると、駆動輪の空転に伴ってモータの回転数が急上昇し、モータで発生する誘起電圧が急上昇する。その後、駆動輪がグリップすると、モータの回転数が急下降し、モータで発生する誘起電圧が急下降する。その結果、インバータの供給電圧とモータの誘起電圧との差が過大となり、インバータからモータに過大な電流が流れ、インバータに含まれるスイッチング素子が破壊され、あるいはモータの故障に至るおそれがある。
【0008】
本発明の目的は、過大な電流が流れることによるインバータ回路の破壊あるいは電動機の故障を防止でき、かつ、車両走行に影響を与えることなく、電動機制御を復帰できる、ハイブリッド車両の制御装置を提供することである。
【課題を解決するための手段】
【0009】
前記の目的を達成するため、本発明に係る制御装置が適用されるハイブリッド車両は、駆動軸と、前記駆動軸に伝達される回転力を発生するエンジンと、前記駆動軸に伝達される回転力を発生する電動機と、前記電動機および前記駆動軸を機械的に接続する接続状態と切断する切断状態とに切り替えられるクラッチとを備える。そして、前記制御装置は、前記電動機に駆動電力を供給するためのインバータ回路と、前記電動機の回転速度を検出する電動機回転速度検出手段と、前記電動機回転速度検出手段によって検出される回転速度に基づいて、前記インバータ回路を介して前記電動機の駆動を制御する電動機制御手段と、前記インバータ回路から前記電動機に流れる交流電流を検出する電流検出手段と、前記電流検出手段によって検出される電流値が所定の閾値以上に上昇したか否かを判定する異常判定手段と、前記異常判定手段によって前記電流値が前記閾値以上に上昇したと判定されたことに応答して、前記電動機制御手段による電動機制御を停止させる制御停止手段と、前記異常判定手段によって前記電流値が前記閾値以上に上昇したと判定されたことに応答して、前記クラッチを前記接続状態から前記切断状態に切り替えるクラッチ制御手段と、前記電動機制御の停止後、前記電動機の回転速度の低下に伴って、前記電動機で発生する誘起電圧が低下し、前記誘起電圧が前記インバータ回路の電源電圧に基づいて設定された所定電圧以下に下がったことに応答して、前記電動機制御を復帰させる復帰制御手段とを含む。
【0010】
ハイブリッド車両は、エンジンおよび電動機を駆動源として搭載している。エンジンが発生する回転力は、駆動軸に伝達される。また、クラッチが接続状態であるときには、電動機と駆動軸とが機械的に接続され、電動機が発生する回転力が駆動軸に伝達される。
【0011】
通常のハイブリッド走行状態では、トルク指令値と実トルクが一致するように、電動機の回転速度に基づいて、電動機がインバータ回路を介して制御される。すなわち、電動機の回転速度に基づいて、インバータ回路が制御され、インバータ回路から電動機に供給される駆動電力が調節される。
【0012】
たとえば、ハイブリッド車両の駆動輪がスリップした後にグリップすると、電動機で発生する誘起電圧が急変し、これに起因して、インバータ回路から電動機に流れる電流が急変する。
【0013】
インバータ回路から電動機に流れる交流電流の電流値(絶対値)が所定の閾値以上に上昇すると、電動機の駆動の制御(電動機制御)が停止される。
【0014】
これにより、インバータ回路から電動機に過大な電流が流れることを防止できる。その結果、過大な電流が流れることによるインバータ回路の破壊あるいは電動機の故障を防止できる。
【0015】
また、インバータ回路から電動機に流れる交流電流の電流値が閾値以上に上昇すると、クラッチが接続状態から切断状態に切り替えられ、電動機と駆動軸とが機械的に切り離される。
【0016】
この電動機と駆動軸との切り離しが行われないと、後述のように電動機制御を復帰させるために電動機の回転速度が下げられるときに、エンジン(駆動軸)の回転速度も同時に低下することになる。エンジンの特性から、一般的に回転速度が低下すると、エンジン出力が低下する。そのため、高速走行時や登坂時に、電動機制御の復帰のためにエンジンの回転速度が下げられると、車速の低下を招き、登坂時には、最悪の場合、エンジン出力の不足による車両のずり下がりが発生するおそれがある。クラッチが切断状態とされることにより、そのような問題を回避し、高速走行や登坂などの車両走行に影響を与えることなく、エンジンの制御を継続することができる。また、エンジン出力を安定に保つことができるので、ハイブリッド車両の挙動を安定に保つことができる。
【0017】
電動機制御が停止されると、電動機の誘起電圧を抑える弱め界磁制御が実行できなくなるため、電動機で発生する誘起電圧が急上昇する。電動機制御が停止されているので、その後、電動機の回転速度が徐々に低下し、この回転速度の低下に伴って、電動機で発生する誘起電圧が徐々に低下する。そして、誘起電圧がインバータ回路の電源電圧に基づいて設定された所定電圧以下に下がると、電動機制御が復帰される。所定電圧は、より具体的には、電動機の誘起電圧がインバータ回路の電源電圧(バッテリ電圧)より低くなったことを検出するように設定されている。電動機制御の復帰後、クラッチが切断状態から接続状態に切り替えられると、エンジンが発生する回転力および電動機が発生する回転力によるハイブリッド走行状態に戻る。
【0018】
ハイブリッド車両に、電動機の回転力によって駆動されるエアコンディショナが備えられている場合、クラッチが接続状態から切断状態に切り替えられた後、エアコンディショナが駆動されることが好ましい。
【0019】
エアコンディショナが駆動されることにより、電動機に負荷がかかるので、電動機の回転速度を速やかに低下させることができる。その結果、電動機制御の停止から復帰までの時間を短縮することができる。
【0020】
駆動軸の回転速度と電動機の回転速度とが一致すると、クラッチを切断状態から接続状態に戻すことができる。
【0021】
そのため、電流値の絶対値が前記閾値以上に上昇したと判定されたことに応答して、クラッチが接続状態から切断状態に切り替えられる前に、変速機が制御されて、駆動軸の回転速度が所定回転速度まで下げられることが好ましい。
【0022】
これにより、電動機制御の停止後、駆動軸の回転速度と電動機の回転速度とが一致するまでに要する時間を短縮することができ、ハイブリッド走行状態の復帰までに要する時間を短縮することができる。
【発明の効果】
【0023】
本発明によれば、過大な電流が流れることによるインバータ回路の破壊あるいはモータの故障を防止できながら、ハイブリッド車両の走行性能を確保することができる。
【図面の簡単な説明】
【0024】
【図1】図1は、本発明の一実施形態に係るハイブリッドカーの構成を示すブロック図である。
【図2】図2は、インバータ回路からモータジェネレータに流れる電流の過渡変化時に実行される処理の一例を示すフローチャートである。
【図3】図3は、図2に示される処理の実行時にモータジェネレータで発生する誘起電圧およびモータジェネレータの回転数の時間変化を示すグラフである。
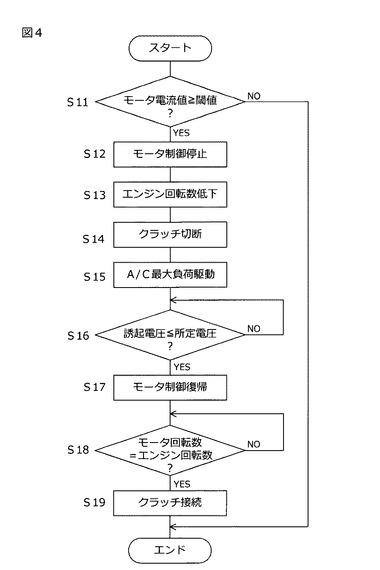
【図4】図4は、インバータ回路からモータジェネレータに流れる電流の過渡変化時に実行される処理の他の例を示すフローチャートである。
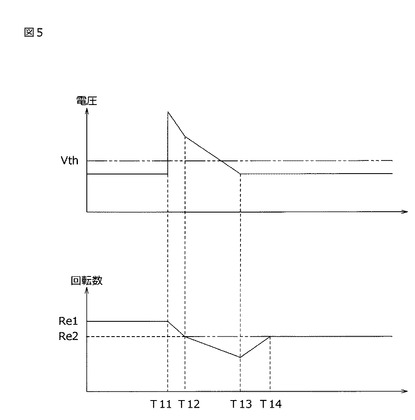
【図5】図5は、図4に示される処理の実行時にモータジェネレータで発生する誘起電圧およびモータジェネレータの回転数の時間変化を示すグラフである。
【発明を実施するための形態】
【0025】
以下では、本発明の実施の形態について、添付図面を参照しつつ詳細に説明する。
【0026】
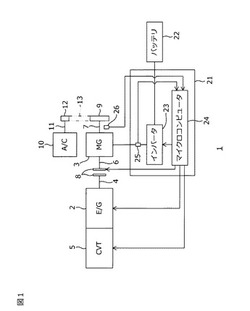
図1は、本発明の一実施形態に係るハイブリッドカーの構成を示すブロック図である。
【0027】
ハイブリッドカー1は、エンジン2およびモータジェネレータ3を駆動源として搭載している。
【0028】
エンジン2は、たとえば、ガソリンエンジンまたはディーゼルエンジンであり、ハイブリッドカー1の走行に必要な駆動力を発生する。エンジン2が発生する駆動力(エンジン出力)は、駆動軸4に伝達され、無段変速機(CVT:Continuously Variable Transmission)5を介して、ハイブリッドカー1の駆動輪に伝達される。
【0029】
モータジェネレータ3は、DCブラシレスモータからなり、モータとしての機能と発電機(ジェネレータ)としての機能とを有している。
【0030】
モータジェネレータ3は、2本の出力軸6,7を備えている。
【0031】
一方の出力軸6は、クラッチ8により、駆動軸4に接続し、また、駆動軸4から切り離すことができる。出力軸6が駆動軸4に接続された状態において、モータジェネレータ3が発生する駆動力(モータ出力)は、駆動軸4に伝達され、駆動軸4を介して、ハイブリッドカー1の駆動輪の回転に使用される。また、出力軸6が駆動軸4に接続された状態において、ハイブリッドカー1の減速時などには、駆動軸4の動力(回転)が出力軸6に伝達され、モータジェネレータ3において、出力軸6に伝達される動力が電力に回生される。
【0032】
他方の出力軸7には、プーリ9が取り付けられている。
【0033】
また、ハイブリッドカー1には、エアコンディショナ(A/C)10が装備されている。エアコンディショナ10のコンプレッサの駆動軸11には、プーリ12が取り付けられている。そして、プーリ9,12には、ベルト13が巻き掛けられている。
【0034】
これにより、エンジン2の停止時において、クラッチ8によって駆動軸4とモータジェネレータ3の出力軸6とを切り離した状態で、モータジェネレータ3をモータとして機能させることにより、エアコンディショナ10のコンプレッサを駆動することができ、エアコンディショナ10を使用することができる。
【0035】
また、ハイブリッドカー1は、電子制御ユニット(ECU)21およびバッテリ22を搭載している。
【0036】
電子制御ユニット21には、インバータ回路23と、CPU、ROMおよびRAMなどからなるマイクロコンピュータ24とが備えられている。
【0037】
インバータ回路23には、バッテリ22が接続されている。モータジェネレータ3がモータとして機能するときには、バッテリ22からインバータ回路23に直流電力が供給され、インバータ回路23で直流電力が交流電力に変換されて、交流電力がインバータ回路23からモータジェネレータ3に供給される。一方、モータジェネレータ3が発電機として機能するときには、モータジェネレータ3からインバータ回路23を介してバッテリ22に直流電力が供給され、バッテリ22が充電される。
【0038】
また、ハイブリッドカー1には、インバータ回路23からモータジェネレータ3に流れる電流(交流電流)を検出するための電流センサ25およびモータジェネレータ3の回転数(回転速度)を検出するためのモータ回転数センサ26が備えられている。さらに、ハイブリッドカー1には、図示されないが、アクセル開度(たとえば、アクセルペダルの踏込量)を検出するためのアクセルセンサおよびエンジン2の回転数を検出するためのエンジン回転数センサなどが備えられている。
【0039】
電流センサ25およびモータ回転数センサ26などの各種センサの検出信号は、マイクロコンピュータ24に入力されるようになっている。
【0040】
マイクロコンピュータ24は、各種センサから入力される検出信号などに基づいて、エンジン2の駆動(たとえば、燃料噴射量や燃料噴射タイミングなど)を制御する。また、マイクロコンピュータ24は、各種センサから入力される検出信号などに基づいて、インバータ回路23を介して、モータジェネレータ3の駆動を制御する。さらに、マイクロコンピュータ24は、各種センサから入力される検出信号などに基づいて、無段変速機5による変速比を制御する。また、マイクロコンピュータ24は、クラッチ8を駆動軸4およびモータジェネレータ3の出力軸6が接続される接続状態と駆動軸4および出力軸6が切断される切断状態とに切り替える。
【0041】
なお、エンジン2、モータジェネレータ3および無段変速機5にそれぞれ対応して、マイクロコンピュータを含む構成の電子制御ユニットが設けられるとともに、車両制御ユニット(VCU)が設けられて、車両制御ユニットから各電子制御ユニットに与えられる制御指令に基づいて、各電子制御ユニットにより、エンジン2、モータジェネレータ3および無段変速機5が制御されてもよい。
【0042】
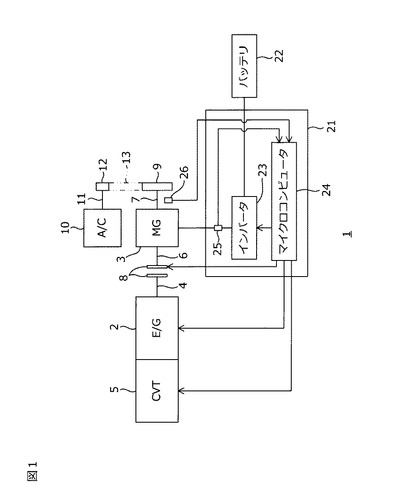
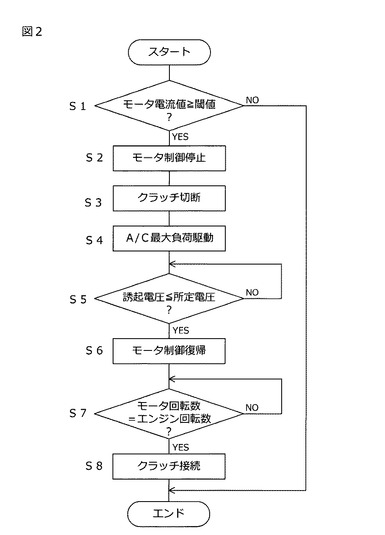
図2は、インバータ回路からモータジェネレータに流れる電流の過渡変化時に実行される処理の一例を示すフローチャートである。図3は、図2に示される処理の実行時にモータジェネレータで発生する誘起電圧およびモータジェネレータの回転数の時間変化を示すグラフである。
【0043】
通常のハイブリッド走行状態では、マイクロコンピュータ24において、アクセルセンサによって検出されるアクセル開度などに基づいて、エンジン2およびモータジェネレータ3の各目標出力トルクが設定される。
【0044】
そして、マイクロコンピュータ24により、エンジン回転数センサによって検出される回転数などに基づいて、エンジン2の目標出力トルクが得られるように、エンジン2の駆動および無段変速機5の変速比が制御される。
【0045】
また、マイクロコンピュータ24により、モータ回転数センサ26によって検出される回転数などに基づいて、モータジェネレータ3の目標出力トルクが得られるように、モータジェネレータ3の駆動が制御(モータ制御)される。より具体的には、マイクロコンピュータ24において、たとえば、モータジェネレータ3の目標出力トルクから電流指令値が生成され、その電流指令値および電流センサ25によって検出される電流値に基づいて、マイクロコンピュータ24により、インバータ回路23に含まれるスイッチング素子のオン/オフが制御されて、インバータ回路23からモータジェネレータ3に流れる電流がフィードバック制御される。
【0046】
電流センサ25によって検出される電流値の絶対値、つまりインバータ回路23からモータジェネレータ3に流れる交流電流の電流値の絶対値が所定の閾値以上に上昇すると(ステップS1のYES)、マイクロコンピュータ24により、以下に説明する処理が実行される。
【0047】
まず、マイクロコンピュータ24によるモータ制御が停止される(ステップS2)。これにより、インバータ回路23からモータジェネレータ3への電力の供給が停止する。モータ制御が停止されると、図3に示されるように、モータジェネレータ3で発生する誘起電圧が急上昇する(時刻T1)。
【0048】
次に、クラッチ8が接続状態から切断状態に切り替えられ(ステップS3)、モータジェネレータ3の出力軸6が駆動軸4から切り離される。
【0049】
その後、エアコンディショナ10がマックスパワー(最大負荷)でオンにされる(ステップS4)。エアコンディショナ10がオンされることにより、モータジェネレータ3の出力軸6の回転エネルギーでエアコンディショナ10のコンプレッサが駆動されるため、モータジェネレータ3に負荷がかかる。その結果、図3に示されるように、モータジェネレータ3の回転数が速やかに低下し(時刻T1−T2)、これに伴って、モータジェネレータ3で発生する誘起電圧が低下する。
【0050】
モータ制御の停止後は、モータジェネレータ3で発生する誘起電圧が監視され、誘起電圧がインバータ回路23の電源電圧に基づいて設定された所定電圧Vth以下に下がったか否かが繰り返し判断される(ステップS5)。所定電圧Vthは、より具体的には、モータジェネレータ3の誘起電圧がインバータ回路23の電源電圧(バッテリ22の出力電圧)より低くなったことを検出するように設定されている。
【0051】
そして、誘起電圧が所定電圧Vth以下に下がると(ステップS5のYES)、マイクロコンピュータ24によるモータ制御が再開(復帰)される(ステップS6)。モータ制御の復帰後は、図3に示されるように、モータジェネレータ3の回転数をエンジン回転数に一致させるべく、モータジェネレータ3の目標出力トルクの指令値(トルク指令値)が設定される(時刻T2−T3)。
【0052】
その後、モータジェネレータ3の回転数がエンジン2の回転数Reまで上昇したか否かが調べられる(ステップS7)。
【0053】
モータジェネレータ3の回転数が上昇し、モータジェネレータ3の回転数がエンジン2の回転数Reに一致すると(ステップS7のYES)、クラッチ8が切断状態から接続状態に切り替えられ、モータジェネレータ3の出力軸6が駆動軸4に接続される。これにより、ハイブリッドカー1の走行状態がエンジン2が発生する回転力およびモータジェネレータ3が発生する回転力によるハイブリッド走行状態に戻る。
【0054】
以上のように、通常のハイブリッド走行状態では、モータジェネレータ3の目標出力トルクの指令値に基づいて、モータジェネレータ3の駆動がインバータ回路23を介して制御される。すなわち、モータジェネレータ3の目標出力トルクの指令値に基づいて、インバータ回路23が制御され、インバータ回路23からモータジェネレータ3に供給される駆動電力が調節される。
【0055】
たとえば、ハイブリッドカー1の駆動輪がスリップした後にグリップすると、モータジェネレータ3で発生する誘起電圧が急変し、これに起因して、インバータ回路23からモータジェネレータ3に流れる電流が急変する。
【0056】
インバータ回路23からモータジェネレータ3に流れる交流電流の電流値の絶対値が所定の閾値以上に上昇すると、モータジェネレータ3の駆動の制御(モータ制御)が停止される。
【0057】
これにより、インバータ回路23からモータジェネレータ3に過大な電流が流れることを防止できる。その結果、過大な電流が流れることによるインバータ回路23の破壊を防止できる。
【0058】
また、インバータ回路23からモータジェネレータ3に流れる交流電流の電流値の絶対値が閾値以上に上昇すると、クラッチ8が接続状態から切断状態に切り替えられ、モータジェネレータ3と駆動軸4とが機械的に切り離される。
【0059】
これにより、モータ制御の停止後、モータジェネレータ3の回転と無関係に、エンジン2の駆動の制御を続けることができる。そのため、ハイブリッドカー1の高速走行および登坂が可能である。また、エンジン2の出力を安定に保つことができるので、ハイブリッドカー1の挙動を安定に保つことができる。
【0060】
モータ制御が停止されると、モータジェネレータ3で発生する誘起電圧が急上昇する。モータ制御が停止されているので、その後、モータジェネレータ3の回転数が徐々に低下し、この回転数の低下に伴って、モータジェネレータ3で発生する誘起電圧が徐々に低下する。そして、誘起電圧がインバータ回路23の電源電圧に基づいて設定された所定電圧Vth以下に下がると、モータ制御が復帰される。モータ制御の復帰後、クラッチ8が切断状態から接続状態に切り替えられると、エンジン2が発生する回転力およびモータジェネレータ3が発生する回転力によるハイブリッド走行状態に戻る。
【0061】
また、クラッチ8が接続状態から切断状態に切り替えられた後、エアコンディショナ10が駆動される。
【0062】
エアコンディショナ10が駆動されることにより、モータジェネレータ3に負荷がかかるので、モータジェネレータ3の回転数を速やかに低下させることができる。その結果、モータ制御の停止から復帰までの時間を短縮することができる。
【0063】
図4は、インバータ回路からモータジェネレータに流れる電流の過渡変化時に実行される処理の他の例を示すフローチャートである。図5は、図4に示される処理の実行時にモータジェネレータで発生する誘起電圧およびモータジェネレータの回転数の時間変化を示すグラフである。
【0064】
図4に示される処理では、電流センサ25によって検出される電流値の絶対値が所定の閾値以上に上昇すると(ステップS11のYES)、マイクロコンピュータ24によるモータ制御が停止される(ステップS12)。これにより、インバータ回路23からモータジェネレータ3への電力の供給が停止する。
【0065】
次いで、マイクロコンピュータ24により、無段変速機5の変速比が変更されて、エンジン2の回転数が下げられる(ステップS13)。エンジン2の回転数は、ハイブリッドカー1の走行に支障がない範囲で、図5に示されるように、回転数Re1から回転数Re2まで下げられる(時刻T11−T12)。より具体的には、必要な動力性能が確保され、燃費性能が悪化しない範囲で、エンジン2の回転数が下げられる。
【0066】
その後、クラッチ8が接続状態から切断状態に切り替えられ(ステップS14)、モータジェネレータ3の出力軸6が駆動軸4から切り離される。
【0067】
その後、エアコンディショナ10がマックスパワー(最大負荷)でオンにされる(ステップS15)。エアコンディショナ10がオンされることにより、モータジェネレータ3の出力軸6の回転エネルギーでエアコンディショナ10のコンプレッサが駆動されるため、モータジェネレータ3に負荷がかかる。その結果、図5に示されるように、モータジェネレータ3の回転数が速やかに低下し(時刻T12−T13)、これに伴って、モータジェネレータ3で発生する誘起電圧が低下する。
【0068】
モータ制御の停止後は、モータジェネレータ3で発生する誘起電圧が監視され、誘起電圧がインバータ回路23の電源電圧に基づいて設定された所定電圧Vth以下に下がったか否かが繰り返し判断される(ステップS16)。
【0069】
そして、誘起電圧が所定電圧Vth以下に下がると(ステップS16のYES)、マイクロコンピュータ24によるモータ制御が再開(復帰)される(ステップS17)。モータ制御の復帰後は、図5に示されるように、モータジェネレータ3の回転数をエンジン2の回転数に一致させるべく、モータジェネレータ3の目標出力トルクの指令値(トルク指令値)が設定される(時刻T13−T14)。
【0070】
その後、モータジェネレータ3の回転数がエンジン2の回転数Re2まで上昇したか否かが調べられる(ステップS18)。
【0071】
モータジェネレータ3の回転数が上昇し、モータジェネレータ3の回転数がエンジン2の回転数Re2に一致すると(ステップS18のYES)、クラッチ8が切断状態から接続状態に切り替えられ、モータジェネレータ3の出力軸6が駆動軸4に接続される。これにより、ハイブリッドカー1の走行状態がエンジン2が発生する回転力およびモータジェネレータ3が発生する回転力によるハイブリッド走行状態に戻る。
【0072】
このように、図4に示される処理では、インバータ回路23からモータジェネレータ3に流れる交流電流の電流値の絶対値が所定の閾値以上に上昇したと判定されたことに応答して、クラッチ8が接続状態から切断状態に切り替えられる前に、無段変速機5の変速比が変更されて、エンジン2の回転数(=駆動軸4の回転数)が回転数Re1から回転数Re2まで下げられる。
【0073】
これにより、モータ制御の停止後、エンジン2の回転数Re2とモータジェネレータ3の回転数とが一致するまでに要する時間を短縮することができ、ハイブリッド走行状態の復帰までに要する時間を短縮することができる。
【0074】
以上、本発明の実施形態について説明したが、本発明は、他の形態で実施することもできる。
【0075】
たとえば、電動機の一例として、モータジェネレータ3を取り上げたが、モータジェネレータ3に代えて、発電機能を有していないモータ(たとえば、永久磁石同期モータ)が用いられてもよい。
【0076】
また、クラッチ8が接続状態から切断状態に切り替えられた後、エアコンディショナ10がオンされずに、モータジェネレータ3の回転数が自然に低下するようにしてもよい。
【0077】
また、クラッチ8が接続状態から切断状態に切り替えられた後、モータジェネレータ3の回転数がエンジン2の回転数と一致したことに応答して、クラッチ8が切断状態から接続状態に戻されるとしたが、モータジェネレータ3の回転数がエンジン2の回転数に基づいて設定される所定回転数に一致したことに応答して、クラッチ8が切断状態から接続状態に戻されてもよい。
【0078】
その他、前述の構成には、特許請求の範囲に記載された事項の範囲で種々の設計変更を施すことが可能である。
【符号の説明】
【0079】
1 ハイブリッドカー(ハイブリッド車両)
2 エンジン
3 モータジェネレータ(電動機)
4 駆動軸
5 無段変速機(変速機)
8 クラッチ
10 エアコンディショナ
21 電子制御ユニット
22 バッテリ
23 インバータ回路
24 マイクロコンピュータ(電動機制御手段、異常判定手段、制御停止手段、クラッチ制御手段、復帰制御手段、回転速度低下手段、駆動軸回転速度低下手段)
25 電流センサ(電流検出手段)
26 モータ回転数センサ(電動機回転速度検出手段)
【技術分野】
【0001】
本発明は、ハイブリッド車両の制御装置に関する。
【背景技術】
【0002】
ハイブリッドカーには、たとえば、エンジンおよびモータが駆動源として搭載されている。
【0003】
エンジンおよびモータの駆動は、電子制御ユニットによって制御される。具体的には、電子制御ユニットにおいて、アクセルペダルの操作量などに基づいて、エンジンの出力トルク目標値が設定されるとともに、モータの出力トルクの目標値が設定される。そして、電子制御ユニットにより、エンジンの出力トルクの目標値などに基づいて、エンジンの駆動が制御される。また、電子制御ユニットにより、モータの出力トルクの目標値などに基づいて、モータに接続されたインバータが制御される。
【0004】
モータの制御中に、モータの回転数(回転速度)などが過渡変化する場合がある。たとえば、モータの回転数が上昇すると、それに伴って、モータで発生する誘起電圧が上昇する。誘起電圧がインバータからモータに供給可能な電圧を上回ると、モータの制御が破綻する(不能となる)。
【0005】
そこで、モータの回転数などが過渡変化した場合にも、モータを安定して制御するために、モータの出力トルクおよび回転数の目標値などに基づいて生成される電圧指令値がインバータから出力可能な最大電圧値を超えたときに、電圧指令値を最大電圧値以下に補正することが提案されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2000−358393号公報
【特許文献2】特開2003−191762号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
ところが、電圧指令値の補正が間に合わず、インバータの破壊を生じるような過大な電流がインバータからモータに流れるおそれがある。たとえば、ハイブリッドカーの駆動輪がスリップすると、駆動輪の空転に伴ってモータの回転数が急上昇し、モータで発生する誘起電圧が急上昇する。その後、駆動輪がグリップすると、モータの回転数が急下降し、モータで発生する誘起電圧が急下降する。その結果、インバータの供給電圧とモータの誘起電圧との差が過大となり、インバータからモータに過大な電流が流れ、インバータに含まれるスイッチング素子が破壊され、あるいはモータの故障に至るおそれがある。
【0008】
本発明の目的は、過大な電流が流れることによるインバータ回路の破壊あるいは電動機の故障を防止でき、かつ、車両走行に影響を与えることなく、電動機制御を復帰できる、ハイブリッド車両の制御装置を提供することである。
【課題を解決するための手段】
【0009】
前記の目的を達成するため、本発明に係る制御装置が適用されるハイブリッド車両は、駆動軸と、前記駆動軸に伝達される回転力を発生するエンジンと、前記駆動軸に伝達される回転力を発生する電動機と、前記電動機および前記駆動軸を機械的に接続する接続状態と切断する切断状態とに切り替えられるクラッチとを備える。そして、前記制御装置は、前記電動機に駆動電力を供給するためのインバータ回路と、前記電動機の回転速度を検出する電動機回転速度検出手段と、前記電動機回転速度検出手段によって検出される回転速度に基づいて、前記インバータ回路を介して前記電動機の駆動を制御する電動機制御手段と、前記インバータ回路から前記電動機に流れる交流電流を検出する電流検出手段と、前記電流検出手段によって検出される電流値が所定の閾値以上に上昇したか否かを判定する異常判定手段と、前記異常判定手段によって前記電流値が前記閾値以上に上昇したと判定されたことに応答して、前記電動機制御手段による電動機制御を停止させる制御停止手段と、前記異常判定手段によって前記電流値が前記閾値以上に上昇したと判定されたことに応答して、前記クラッチを前記接続状態から前記切断状態に切り替えるクラッチ制御手段と、前記電動機制御の停止後、前記電動機の回転速度の低下に伴って、前記電動機で発生する誘起電圧が低下し、前記誘起電圧が前記インバータ回路の電源電圧に基づいて設定された所定電圧以下に下がったことに応答して、前記電動機制御を復帰させる復帰制御手段とを含む。
【0010】
ハイブリッド車両は、エンジンおよび電動機を駆動源として搭載している。エンジンが発生する回転力は、駆動軸に伝達される。また、クラッチが接続状態であるときには、電動機と駆動軸とが機械的に接続され、電動機が発生する回転力が駆動軸に伝達される。
【0011】
通常のハイブリッド走行状態では、トルク指令値と実トルクが一致するように、電動機の回転速度に基づいて、電動機がインバータ回路を介して制御される。すなわち、電動機の回転速度に基づいて、インバータ回路が制御され、インバータ回路から電動機に供給される駆動電力が調節される。
【0012】
たとえば、ハイブリッド車両の駆動輪がスリップした後にグリップすると、電動機で発生する誘起電圧が急変し、これに起因して、インバータ回路から電動機に流れる電流が急変する。
【0013】
インバータ回路から電動機に流れる交流電流の電流値(絶対値)が所定の閾値以上に上昇すると、電動機の駆動の制御(電動機制御)が停止される。
【0014】
これにより、インバータ回路から電動機に過大な電流が流れることを防止できる。その結果、過大な電流が流れることによるインバータ回路の破壊あるいは電動機の故障を防止できる。
【0015】
また、インバータ回路から電動機に流れる交流電流の電流値が閾値以上に上昇すると、クラッチが接続状態から切断状態に切り替えられ、電動機と駆動軸とが機械的に切り離される。
【0016】
この電動機と駆動軸との切り離しが行われないと、後述のように電動機制御を復帰させるために電動機の回転速度が下げられるときに、エンジン(駆動軸)の回転速度も同時に低下することになる。エンジンの特性から、一般的に回転速度が低下すると、エンジン出力が低下する。そのため、高速走行時や登坂時に、電動機制御の復帰のためにエンジンの回転速度が下げられると、車速の低下を招き、登坂時には、最悪の場合、エンジン出力の不足による車両のずり下がりが発生するおそれがある。クラッチが切断状態とされることにより、そのような問題を回避し、高速走行や登坂などの車両走行に影響を与えることなく、エンジンの制御を継続することができる。また、エンジン出力を安定に保つことができるので、ハイブリッド車両の挙動を安定に保つことができる。
【0017】
電動機制御が停止されると、電動機の誘起電圧を抑える弱め界磁制御が実行できなくなるため、電動機で発生する誘起電圧が急上昇する。電動機制御が停止されているので、その後、電動機の回転速度が徐々に低下し、この回転速度の低下に伴って、電動機で発生する誘起電圧が徐々に低下する。そして、誘起電圧がインバータ回路の電源電圧に基づいて設定された所定電圧以下に下がると、電動機制御が復帰される。所定電圧は、より具体的には、電動機の誘起電圧がインバータ回路の電源電圧(バッテリ電圧)より低くなったことを検出するように設定されている。電動機制御の復帰後、クラッチが切断状態から接続状態に切り替えられると、エンジンが発生する回転力および電動機が発生する回転力によるハイブリッド走行状態に戻る。
【0018】
ハイブリッド車両に、電動機の回転力によって駆動されるエアコンディショナが備えられている場合、クラッチが接続状態から切断状態に切り替えられた後、エアコンディショナが駆動されることが好ましい。
【0019】
エアコンディショナが駆動されることにより、電動機に負荷がかかるので、電動機の回転速度を速やかに低下させることができる。その結果、電動機制御の停止から復帰までの時間を短縮することができる。
【0020】
駆動軸の回転速度と電動機の回転速度とが一致すると、クラッチを切断状態から接続状態に戻すことができる。
【0021】
そのため、電流値の絶対値が前記閾値以上に上昇したと判定されたことに応答して、クラッチが接続状態から切断状態に切り替えられる前に、変速機が制御されて、駆動軸の回転速度が所定回転速度まで下げられることが好ましい。
【0022】
これにより、電動機制御の停止後、駆動軸の回転速度と電動機の回転速度とが一致するまでに要する時間を短縮することができ、ハイブリッド走行状態の復帰までに要する時間を短縮することができる。
【発明の効果】
【0023】
本発明によれば、過大な電流が流れることによるインバータ回路の破壊あるいはモータの故障を防止できながら、ハイブリッド車両の走行性能を確保することができる。
【図面の簡単な説明】
【0024】
【図1】図1は、本発明の一実施形態に係るハイブリッドカーの構成を示すブロック図である。
【図2】図2は、インバータ回路からモータジェネレータに流れる電流の過渡変化時に実行される処理の一例を示すフローチャートである。
【図3】図3は、図2に示される処理の実行時にモータジェネレータで発生する誘起電圧およびモータジェネレータの回転数の時間変化を示すグラフである。
【図4】図4は、インバータ回路からモータジェネレータに流れる電流の過渡変化時に実行される処理の他の例を示すフローチャートである。
【図5】図5は、図4に示される処理の実行時にモータジェネレータで発生する誘起電圧およびモータジェネレータの回転数の時間変化を示すグラフである。
【発明を実施するための形態】
【0025】
以下では、本発明の実施の形態について、添付図面を参照しつつ詳細に説明する。
【0026】
図1は、本発明の一実施形態に係るハイブリッドカーの構成を示すブロック図である。
【0027】
ハイブリッドカー1は、エンジン2およびモータジェネレータ3を駆動源として搭載している。
【0028】
エンジン2は、たとえば、ガソリンエンジンまたはディーゼルエンジンであり、ハイブリッドカー1の走行に必要な駆動力を発生する。エンジン2が発生する駆動力(エンジン出力)は、駆動軸4に伝達され、無段変速機(CVT:Continuously Variable Transmission)5を介して、ハイブリッドカー1の駆動輪に伝達される。
【0029】
モータジェネレータ3は、DCブラシレスモータからなり、モータとしての機能と発電機(ジェネレータ)としての機能とを有している。
【0030】
モータジェネレータ3は、2本の出力軸6,7を備えている。
【0031】
一方の出力軸6は、クラッチ8により、駆動軸4に接続し、また、駆動軸4から切り離すことができる。出力軸6が駆動軸4に接続された状態において、モータジェネレータ3が発生する駆動力(モータ出力)は、駆動軸4に伝達され、駆動軸4を介して、ハイブリッドカー1の駆動輪の回転に使用される。また、出力軸6が駆動軸4に接続された状態において、ハイブリッドカー1の減速時などには、駆動軸4の動力(回転)が出力軸6に伝達され、モータジェネレータ3において、出力軸6に伝達される動力が電力に回生される。
【0032】
他方の出力軸7には、プーリ9が取り付けられている。
【0033】
また、ハイブリッドカー1には、エアコンディショナ(A/C)10が装備されている。エアコンディショナ10のコンプレッサの駆動軸11には、プーリ12が取り付けられている。そして、プーリ9,12には、ベルト13が巻き掛けられている。
【0034】
これにより、エンジン2の停止時において、クラッチ8によって駆動軸4とモータジェネレータ3の出力軸6とを切り離した状態で、モータジェネレータ3をモータとして機能させることにより、エアコンディショナ10のコンプレッサを駆動することができ、エアコンディショナ10を使用することができる。
【0035】
また、ハイブリッドカー1は、電子制御ユニット(ECU)21およびバッテリ22を搭載している。
【0036】
電子制御ユニット21には、インバータ回路23と、CPU、ROMおよびRAMなどからなるマイクロコンピュータ24とが備えられている。
【0037】
インバータ回路23には、バッテリ22が接続されている。モータジェネレータ3がモータとして機能するときには、バッテリ22からインバータ回路23に直流電力が供給され、インバータ回路23で直流電力が交流電力に変換されて、交流電力がインバータ回路23からモータジェネレータ3に供給される。一方、モータジェネレータ3が発電機として機能するときには、モータジェネレータ3からインバータ回路23を介してバッテリ22に直流電力が供給され、バッテリ22が充電される。
【0038】
また、ハイブリッドカー1には、インバータ回路23からモータジェネレータ3に流れる電流(交流電流)を検出するための電流センサ25およびモータジェネレータ3の回転数(回転速度)を検出するためのモータ回転数センサ26が備えられている。さらに、ハイブリッドカー1には、図示されないが、アクセル開度(たとえば、アクセルペダルの踏込量)を検出するためのアクセルセンサおよびエンジン2の回転数を検出するためのエンジン回転数センサなどが備えられている。
【0039】
電流センサ25およびモータ回転数センサ26などの各種センサの検出信号は、マイクロコンピュータ24に入力されるようになっている。
【0040】
マイクロコンピュータ24は、各種センサから入力される検出信号などに基づいて、エンジン2の駆動(たとえば、燃料噴射量や燃料噴射タイミングなど)を制御する。また、マイクロコンピュータ24は、各種センサから入力される検出信号などに基づいて、インバータ回路23を介して、モータジェネレータ3の駆動を制御する。さらに、マイクロコンピュータ24は、各種センサから入力される検出信号などに基づいて、無段変速機5による変速比を制御する。また、マイクロコンピュータ24は、クラッチ8を駆動軸4およびモータジェネレータ3の出力軸6が接続される接続状態と駆動軸4および出力軸6が切断される切断状態とに切り替える。
【0041】
なお、エンジン2、モータジェネレータ3および無段変速機5にそれぞれ対応して、マイクロコンピュータを含む構成の電子制御ユニットが設けられるとともに、車両制御ユニット(VCU)が設けられて、車両制御ユニットから各電子制御ユニットに与えられる制御指令に基づいて、各電子制御ユニットにより、エンジン2、モータジェネレータ3および無段変速機5が制御されてもよい。
【0042】
図2は、インバータ回路からモータジェネレータに流れる電流の過渡変化時に実行される処理の一例を示すフローチャートである。図3は、図2に示される処理の実行時にモータジェネレータで発生する誘起電圧およびモータジェネレータの回転数の時間変化を示すグラフである。
【0043】
通常のハイブリッド走行状態では、マイクロコンピュータ24において、アクセルセンサによって検出されるアクセル開度などに基づいて、エンジン2およびモータジェネレータ3の各目標出力トルクが設定される。
【0044】
そして、マイクロコンピュータ24により、エンジン回転数センサによって検出される回転数などに基づいて、エンジン2の目標出力トルクが得られるように、エンジン2の駆動および無段変速機5の変速比が制御される。
【0045】
また、マイクロコンピュータ24により、モータ回転数センサ26によって検出される回転数などに基づいて、モータジェネレータ3の目標出力トルクが得られるように、モータジェネレータ3の駆動が制御(モータ制御)される。より具体的には、マイクロコンピュータ24において、たとえば、モータジェネレータ3の目標出力トルクから電流指令値が生成され、その電流指令値および電流センサ25によって検出される電流値に基づいて、マイクロコンピュータ24により、インバータ回路23に含まれるスイッチング素子のオン/オフが制御されて、インバータ回路23からモータジェネレータ3に流れる電流がフィードバック制御される。
【0046】
電流センサ25によって検出される電流値の絶対値、つまりインバータ回路23からモータジェネレータ3に流れる交流電流の電流値の絶対値が所定の閾値以上に上昇すると(ステップS1のYES)、マイクロコンピュータ24により、以下に説明する処理が実行される。
【0047】
まず、マイクロコンピュータ24によるモータ制御が停止される(ステップS2)。これにより、インバータ回路23からモータジェネレータ3への電力の供給が停止する。モータ制御が停止されると、図3に示されるように、モータジェネレータ3で発生する誘起電圧が急上昇する(時刻T1)。
【0048】
次に、クラッチ8が接続状態から切断状態に切り替えられ(ステップS3)、モータジェネレータ3の出力軸6が駆動軸4から切り離される。
【0049】
その後、エアコンディショナ10がマックスパワー(最大負荷)でオンにされる(ステップS4)。エアコンディショナ10がオンされることにより、モータジェネレータ3の出力軸6の回転エネルギーでエアコンディショナ10のコンプレッサが駆動されるため、モータジェネレータ3に負荷がかかる。その結果、図3に示されるように、モータジェネレータ3の回転数が速やかに低下し(時刻T1−T2)、これに伴って、モータジェネレータ3で発生する誘起電圧が低下する。
【0050】
モータ制御の停止後は、モータジェネレータ3で発生する誘起電圧が監視され、誘起電圧がインバータ回路23の電源電圧に基づいて設定された所定電圧Vth以下に下がったか否かが繰り返し判断される(ステップS5)。所定電圧Vthは、より具体的には、モータジェネレータ3の誘起電圧がインバータ回路23の電源電圧(バッテリ22の出力電圧)より低くなったことを検出するように設定されている。
【0051】
そして、誘起電圧が所定電圧Vth以下に下がると(ステップS5のYES)、マイクロコンピュータ24によるモータ制御が再開(復帰)される(ステップS6)。モータ制御の復帰後は、図3に示されるように、モータジェネレータ3の回転数をエンジン回転数に一致させるべく、モータジェネレータ3の目標出力トルクの指令値(トルク指令値)が設定される(時刻T2−T3)。
【0052】
その後、モータジェネレータ3の回転数がエンジン2の回転数Reまで上昇したか否かが調べられる(ステップS7)。
【0053】
モータジェネレータ3の回転数が上昇し、モータジェネレータ3の回転数がエンジン2の回転数Reに一致すると(ステップS7のYES)、クラッチ8が切断状態から接続状態に切り替えられ、モータジェネレータ3の出力軸6が駆動軸4に接続される。これにより、ハイブリッドカー1の走行状態がエンジン2が発生する回転力およびモータジェネレータ3が発生する回転力によるハイブリッド走行状態に戻る。
【0054】
以上のように、通常のハイブリッド走行状態では、モータジェネレータ3の目標出力トルクの指令値に基づいて、モータジェネレータ3の駆動がインバータ回路23を介して制御される。すなわち、モータジェネレータ3の目標出力トルクの指令値に基づいて、インバータ回路23が制御され、インバータ回路23からモータジェネレータ3に供給される駆動電力が調節される。
【0055】
たとえば、ハイブリッドカー1の駆動輪がスリップした後にグリップすると、モータジェネレータ3で発生する誘起電圧が急変し、これに起因して、インバータ回路23からモータジェネレータ3に流れる電流が急変する。
【0056】
インバータ回路23からモータジェネレータ3に流れる交流電流の電流値の絶対値が所定の閾値以上に上昇すると、モータジェネレータ3の駆動の制御(モータ制御)が停止される。
【0057】
これにより、インバータ回路23からモータジェネレータ3に過大な電流が流れることを防止できる。その結果、過大な電流が流れることによるインバータ回路23の破壊を防止できる。
【0058】
また、インバータ回路23からモータジェネレータ3に流れる交流電流の電流値の絶対値が閾値以上に上昇すると、クラッチ8が接続状態から切断状態に切り替えられ、モータジェネレータ3と駆動軸4とが機械的に切り離される。
【0059】
これにより、モータ制御の停止後、モータジェネレータ3の回転と無関係に、エンジン2の駆動の制御を続けることができる。そのため、ハイブリッドカー1の高速走行および登坂が可能である。また、エンジン2の出力を安定に保つことができるので、ハイブリッドカー1の挙動を安定に保つことができる。
【0060】
モータ制御が停止されると、モータジェネレータ3で発生する誘起電圧が急上昇する。モータ制御が停止されているので、その後、モータジェネレータ3の回転数が徐々に低下し、この回転数の低下に伴って、モータジェネレータ3で発生する誘起電圧が徐々に低下する。そして、誘起電圧がインバータ回路23の電源電圧に基づいて設定された所定電圧Vth以下に下がると、モータ制御が復帰される。モータ制御の復帰後、クラッチ8が切断状態から接続状態に切り替えられると、エンジン2が発生する回転力およびモータジェネレータ3が発生する回転力によるハイブリッド走行状態に戻る。
【0061】
また、クラッチ8が接続状態から切断状態に切り替えられた後、エアコンディショナ10が駆動される。
【0062】
エアコンディショナ10が駆動されることにより、モータジェネレータ3に負荷がかかるので、モータジェネレータ3の回転数を速やかに低下させることができる。その結果、モータ制御の停止から復帰までの時間を短縮することができる。
【0063】
図4は、インバータ回路からモータジェネレータに流れる電流の過渡変化時に実行される処理の他の例を示すフローチャートである。図5は、図4に示される処理の実行時にモータジェネレータで発生する誘起電圧およびモータジェネレータの回転数の時間変化を示すグラフである。
【0064】
図4に示される処理では、電流センサ25によって検出される電流値の絶対値が所定の閾値以上に上昇すると(ステップS11のYES)、マイクロコンピュータ24によるモータ制御が停止される(ステップS12)。これにより、インバータ回路23からモータジェネレータ3への電力の供給が停止する。
【0065】
次いで、マイクロコンピュータ24により、無段変速機5の変速比が変更されて、エンジン2の回転数が下げられる(ステップS13)。エンジン2の回転数は、ハイブリッドカー1の走行に支障がない範囲で、図5に示されるように、回転数Re1から回転数Re2まで下げられる(時刻T11−T12)。より具体的には、必要な動力性能が確保され、燃費性能が悪化しない範囲で、エンジン2の回転数が下げられる。
【0066】
その後、クラッチ8が接続状態から切断状態に切り替えられ(ステップS14)、モータジェネレータ3の出力軸6が駆動軸4から切り離される。
【0067】
その後、エアコンディショナ10がマックスパワー(最大負荷)でオンにされる(ステップS15)。エアコンディショナ10がオンされることにより、モータジェネレータ3の出力軸6の回転エネルギーでエアコンディショナ10のコンプレッサが駆動されるため、モータジェネレータ3に負荷がかかる。その結果、図5に示されるように、モータジェネレータ3の回転数が速やかに低下し(時刻T12−T13)、これに伴って、モータジェネレータ3で発生する誘起電圧が低下する。
【0068】
モータ制御の停止後は、モータジェネレータ3で発生する誘起電圧が監視され、誘起電圧がインバータ回路23の電源電圧に基づいて設定された所定電圧Vth以下に下がったか否かが繰り返し判断される(ステップS16)。
【0069】
そして、誘起電圧が所定電圧Vth以下に下がると(ステップS16のYES)、マイクロコンピュータ24によるモータ制御が再開(復帰)される(ステップS17)。モータ制御の復帰後は、図5に示されるように、モータジェネレータ3の回転数をエンジン2の回転数に一致させるべく、モータジェネレータ3の目標出力トルクの指令値(トルク指令値)が設定される(時刻T13−T14)。
【0070】
その後、モータジェネレータ3の回転数がエンジン2の回転数Re2まで上昇したか否かが調べられる(ステップS18)。
【0071】
モータジェネレータ3の回転数が上昇し、モータジェネレータ3の回転数がエンジン2の回転数Re2に一致すると(ステップS18のYES)、クラッチ8が切断状態から接続状態に切り替えられ、モータジェネレータ3の出力軸6が駆動軸4に接続される。これにより、ハイブリッドカー1の走行状態がエンジン2が発生する回転力およびモータジェネレータ3が発生する回転力によるハイブリッド走行状態に戻る。
【0072】
このように、図4に示される処理では、インバータ回路23からモータジェネレータ3に流れる交流電流の電流値の絶対値が所定の閾値以上に上昇したと判定されたことに応答して、クラッチ8が接続状態から切断状態に切り替えられる前に、無段変速機5の変速比が変更されて、エンジン2の回転数(=駆動軸4の回転数)が回転数Re1から回転数Re2まで下げられる。
【0073】
これにより、モータ制御の停止後、エンジン2の回転数Re2とモータジェネレータ3の回転数とが一致するまでに要する時間を短縮することができ、ハイブリッド走行状態の復帰までに要する時間を短縮することができる。
【0074】
以上、本発明の実施形態について説明したが、本発明は、他の形態で実施することもできる。
【0075】
たとえば、電動機の一例として、モータジェネレータ3を取り上げたが、モータジェネレータ3に代えて、発電機能を有していないモータ(たとえば、永久磁石同期モータ)が用いられてもよい。
【0076】
また、クラッチ8が接続状態から切断状態に切り替えられた後、エアコンディショナ10がオンされずに、モータジェネレータ3の回転数が自然に低下するようにしてもよい。
【0077】
また、クラッチ8が接続状態から切断状態に切り替えられた後、モータジェネレータ3の回転数がエンジン2の回転数と一致したことに応答して、クラッチ8が切断状態から接続状態に戻されるとしたが、モータジェネレータ3の回転数がエンジン2の回転数に基づいて設定される所定回転数に一致したことに応答して、クラッチ8が切断状態から接続状態に戻されてもよい。
【0078】
その他、前述の構成には、特許請求の範囲に記載された事項の範囲で種々の設計変更を施すことが可能である。
【符号の説明】
【0079】
1 ハイブリッドカー(ハイブリッド車両)
2 エンジン
3 モータジェネレータ(電動機)
4 駆動軸
5 無段変速機(変速機)
8 クラッチ
10 エアコンディショナ
21 電子制御ユニット
22 バッテリ
23 インバータ回路
24 マイクロコンピュータ(電動機制御手段、異常判定手段、制御停止手段、クラッチ制御手段、復帰制御手段、回転速度低下手段、駆動軸回転速度低下手段)
25 電流センサ(電流検出手段)
26 モータ回転数センサ(電動機回転速度検出手段)
【特許請求の範囲】
【請求項1】
駆動軸と、前記駆動軸に伝達される回転力を発生するエンジンと、前記駆動軸に伝達される回転力を発生する電動機と、前記電動機および前記駆動軸を機械的に接続する接続状態と切断する切断状態とに切り替えられるクラッチとを備えるハイブリッド車両の制御装置であって、
前記電動機に駆動電力を供給するためのインバータ回路と、
前記電動機の回転速度を検出する電動機回転速度検出手段と、
前記電動機回転速度検出手段によって検出される回転速度に基づいて、前記インバータ回路を介して前記電動機の駆動を制御する電動機制御手段と、
前記インバータ回路から前記電動機に流れる交流電流を検出する電流検出手段と、
前記電流検出手段によって検出される電流値が所定の閾値以上に上昇したか否かを判定する異常判定手段と、
前記異常判定手段によって前記電流値が前記閾値以上に上昇したと判定されたことに応答して、前記電動機制御手段による電動機制御を停止させる制御停止手段と、
前記異常判定手段によって前記電流値が前記閾値以上に上昇したと判定されたことに応答して、前記クラッチを前記接続状態から前記切断状態に切り替えるクラッチ制御手段と、
前記電動機制御の停止後、前記電動機の回転速度の低下に伴って、前記電動機で発生する誘起電圧が低下し、前記誘起電圧が前記インバータ回路の電源電圧に基づいて設定された所定電圧以下に下がったことに応答して、前記電動機制御を復帰させる復帰制御手段とを含む、ハイブリッド車両の制御装置。
【請求項2】
前記ハイブリッド車両は、前記電動機の回転力によって駆動されるエアコンディショナを備えており、
前記クラッチが前記接続状態から前記切断状態に切り替えられた後、前記エアコンディショナを駆動させることにより、前記電動機の回転速度を低下させる回転速度低下手段をさらに含む、請求項1に記載のハイブリッド車両の制御装置。
【請求項3】
前記ハイブリッド車両は、前記駆動軸の回転速度を変更する変速機を備えており、
前記異常判定手段によって前記電流値が前記閾値以上に上昇したと判定されたことに応答して、前記クラッチが前記接続状態から前記切断状態に切り替えられる前に、前記変速機を制御して、前記駆動軸の回転速度を所定回転速度まで低下させる駆動軸回転速度低下手段をさらに含む、請求項1または2に記載のハイブリッド車両の制御装置。
【請求項1】
駆動軸と、前記駆動軸に伝達される回転力を発生するエンジンと、前記駆動軸に伝達される回転力を発生する電動機と、前記電動機および前記駆動軸を機械的に接続する接続状態と切断する切断状態とに切り替えられるクラッチとを備えるハイブリッド車両の制御装置であって、
前記電動機に駆動電力を供給するためのインバータ回路と、
前記電動機の回転速度を検出する電動機回転速度検出手段と、
前記電動機回転速度検出手段によって検出される回転速度に基づいて、前記インバータ回路を介して前記電動機の駆動を制御する電動機制御手段と、
前記インバータ回路から前記電動機に流れる交流電流を検出する電流検出手段と、
前記電流検出手段によって検出される電流値が所定の閾値以上に上昇したか否かを判定する異常判定手段と、
前記異常判定手段によって前記電流値が前記閾値以上に上昇したと判定されたことに応答して、前記電動機制御手段による電動機制御を停止させる制御停止手段と、
前記異常判定手段によって前記電流値が前記閾値以上に上昇したと判定されたことに応答して、前記クラッチを前記接続状態から前記切断状態に切り替えるクラッチ制御手段と、
前記電動機制御の停止後、前記電動機の回転速度の低下に伴って、前記電動機で発生する誘起電圧が低下し、前記誘起電圧が前記インバータ回路の電源電圧に基づいて設定された所定電圧以下に下がったことに応答して、前記電動機制御を復帰させる復帰制御手段とを含む、ハイブリッド車両の制御装置。
【請求項2】
前記ハイブリッド車両は、前記電動機の回転力によって駆動されるエアコンディショナを備えており、
前記クラッチが前記接続状態から前記切断状態に切り替えられた後、前記エアコンディショナを駆動させることにより、前記電動機の回転速度を低下させる回転速度低下手段をさらに含む、請求項1に記載のハイブリッド車両の制御装置。
【請求項3】
前記ハイブリッド車両は、前記駆動軸の回転速度を変更する変速機を備えており、
前記異常判定手段によって前記電流値が前記閾値以上に上昇したと判定されたことに応答して、前記クラッチが前記接続状態から前記切断状態に切り替えられる前に、前記変速機を制御して、前記駆動軸の回転速度を所定回転速度まで低下させる駆動軸回転速度低下手段をさらに含む、請求項1または2に記載のハイブリッド車両の制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2013−112302(P2013−112302A)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2011−262793(P2011−262793)
【出願日】平成23年11月30日(2011.11.30)
【出願人】(000002967)ダイハツ工業株式会社 (2,560)
【Fターム(参考)】
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成23年11月30日(2011.11.30)
【出願人】(000002967)ダイハツ工業株式会社 (2,560)
【Fターム(参考)】
[ Back to top ]