
パワーステアリング装置
【課題】トルクセンサの検出精度が維持されるパワーステアリング装置を提供する。
【解決手段】ステアリングシャフト10に入力される操舵トルクを磁気を介して検出する非接触式のトルクセンサ4を備えるパワーステアリング装置1であって、ステアリングシャフト10は、入力シャフト11と出力シャフト13の間で操舵トルクを伝達するトーションバー12を備え、ハウジング3は、入力シャフト11を回転可能に支持するセンサケース20と、出力シャフト13を回転可能に支持するギアケース30と、センサケース20とギアケース30とを互いに傾倒可能に連結する連結手段5と、を備える構成とした。
【解決手段】ステアリングシャフト10に入力される操舵トルクを磁気を介して検出する非接触式のトルクセンサ4を備えるパワーステアリング装置1であって、ステアリングシャフト10は、入力シャフト11と出力シャフト13の間で操舵トルクを伝達するトーションバー12を備え、ハウジング3は、入力シャフト11を回転可能に支持するセンサケース20と、出力シャフト13を回転可能に支持するギアケース30と、センサケース20とギアケース30とを互いに傾倒可能に連結する連結手段5と、を備える構成とした。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両のパワーステアリング装置に関するものである。
【背景技術】
【0002】
従来の電動パワーステアリング装置は、操舵トルクを転舵機構に伝達するステアリングシャフトと、ステアリングシャフトを収容するハウジングと、ステアリングシャフトに入力される操舵トルクを磁気を介して検出する非接触式のトルクセンサと、を備えるものがある(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−241343号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、このような従来のパワーステアリング装置にあっては、ステアリングシャフトに操舵トルクが入力される操舵時に、ステアリングシャフトに付与される偶力によってステアリングシャフトがわずかに屈曲すると、ハウジングとステアリングシャフトの間に設けられる環状の磁気ギャップの開口幅が変化し、トルクセンサの検出精度が悪化するという問題点があった。
【0005】
本発明は上記の問題点に鑑みてなされたものであり、トルクセンサの検出精度が維持されるパワーステアリング装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明は、操舵トルクを転舵機構に伝達するステアリングシャフトと、ステアリングシャフトを収容するハウジングと、ステアリングシャフトに入力される操舵トルクを磁気を介して検出する非接触式のトルクセンサと、を備えるパワーステアリング装置であって、ステアリングシャフトは、操舵トルクが入力される入力シャフトと、転舵機構に転舵力を出力する出力シャフトと、入力シャフトと出力シャフトの間で操舵トルクを伝達するトーションバーと、を備え、ハウジングは、入力シャフトを回転可能に支持するセンサケースと、出力シャフトを回転可能に支持するギアケースと、センサケースとギアケースとを互いに傾倒可能に連結する連結手段と、を備えることを特徴とする。
【発明の効果】
【0007】
本発明によると、操舵時にステアリングシャフトに付与される力によってセンサケースが入力シャフトと共に傾倒することで、ハウジングに対するステアリングシャフトの同心度が確保され、トルクセンサの磁気回路が正常に保たれ、トルクセンサの検出精度が維持される。
【図面の簡単な説明】
【0008】
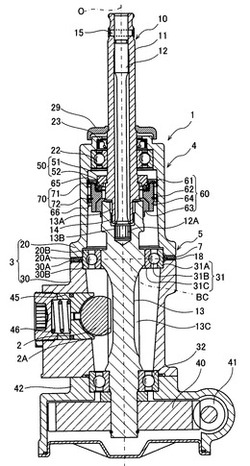
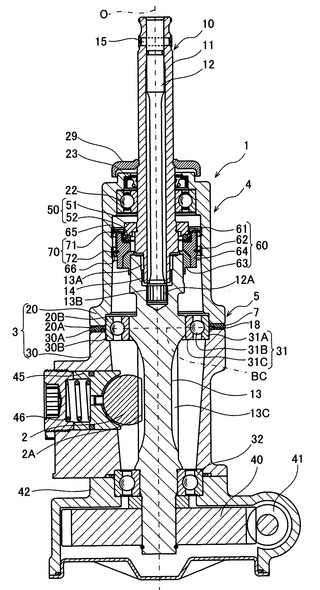
【図1】本発明の実施形態を示すパワーステアリング装置の縦断面図である。
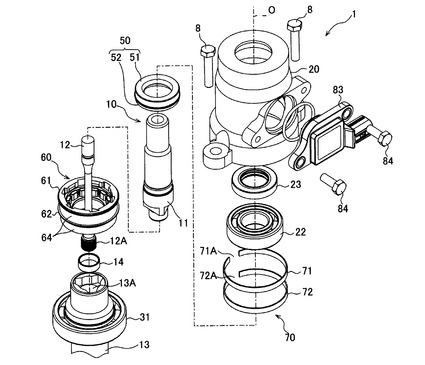
【図2】ギアケースを取り除いた状態におけるパワーステアリング装置の分解斜視図である。
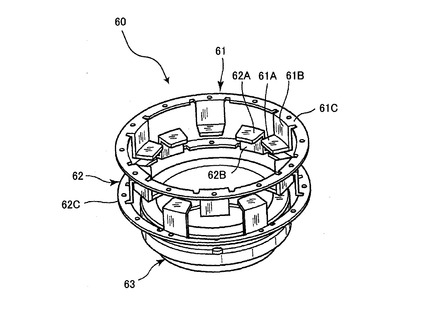
【図3】回転磁気回路部の斜視図である。
【図4】(A)、(B)は、操舵時におけるパワーステアリング装置の縦断面図である。
【発明を実施するための形態】
【0009】
図面を参照して、本発明の実施形態による車両用のパワーステアリング装置1を説明する。
【0010】
図1及び図2に示すように、パワーステアリング装置1は、操舵力によって回転するステアリングシャフト10と、車輪の転舵機構(図示せず)に連係するラックシャフト2とを備え、ステアリングシャフト10の回転によってラックシャフト2を軸方向に移動させて車輪を操舵する装置である。
【0011】
ステアリングシャフト10を収容するハウジング3は、複数のボルト8(図2参照)によって連結される上部のセンサケース20及び下部のギアケース30を備える。ギアケース30が車体(図示せず)に支持される。センサケース20及びギアケース30は非磁性体のアルミ合金等によって形成される。
【0012】
ステアリングシャフト10は、ハウジング3によって支持される軸部材である。ステアリングシャフト10は、伝達ロッド機構(図示せず)から操舵トルクが入力される入力シャフト11と、トーションバー12と、車輪の転舵機構に転舵力を出力する出力シャフト13と、を備える。伝達ロッド機構には、運転者によって操舵されるステアリングホイール(図示せず)から操舵トルクが入力される。
【0013】
入力シャフト11は、転がり式の軸受22を介してセンサケース20に回転自在に支持される。入力シャフト11とセンサケース20との間はダストシール23によってシールされる。ダストシール23は、軸受22の上方に配設されている。
【0014】
入力シャフト11には、センサケース20から突出する部位に鍔状のカバー29が取り付けられる。カバー29によってセンサケース20の開口端部が覆われている。
【0015】
出力シャフト13は、その上部に設けられる転がり式の軸受31と、その下部に設けられる転がり式の軸受32とによって回転自在に支持される。
【0016】
出力シャフト13の上端部には、入力シャフト11の下端部を収容可能な収容室13Aが形成されている。出力シャフト13の収容室13Aの内周面と、入力シャフト11の下端部の外周面との間には、滑り軸受14が介装される。これにより、入力シャフト11及び出力シャフト13は、同一軸上で相対回転可能となる。
【0017】
入力シャフト11は円筒状に形成されており、入力シャフト11の内部にはトーションバー12が同一軸上に収められる。トーションバー12の上端部は、ピン15を介して、入力シャフト11の上端部に連結される。
【0018】
トーションバー12の下端部は、入力シャフト11の下端開口部より下方に突出する。トーションバー12の下端部の外周面には、セレーション12Aが形成されている。トーションバー12の下端部は、セレーション12Aを介して、収容室13Aの底部に形成された係合孔13Bに連結される。
【0019】
トーションバー12は、入力シャフト11に入力される操舵トルクを出力シャフト13に伝達すると共に、そのトルクに応じて回転軸Oを中心にねじれ変形する。
【0020】
出力シャフト13は、下端寄りの外周面にギア13Cを備える。出力シャフト13のギア13Cは、ラックシャフト2に形成されたラックギア2Aと噛合する。入力シャフト11の回転に伴って出力シャフト13が回転することで、ラックシャフト2が軸方向(略水平方向)に移動し、車輪が操舵される。
【0021】
ギアケース30には、ラックシャフト2の外周面に摺接するプレッシャパッド45と、このプレッシャパッド45を付勢するスプリング46が設けられる。スプリング46のバネ力によってプレッシャパッド45がラックシャフト2の外周面に押し付けられ、ラックギア2Aが出力シャフト13のギア13Cに押し付けられ、ギア13Cに対するラックギア2Aのバックラッシュが零に保たれる。
【0022】
パワーステアリング装置1は、操舵トルクを補助的に出力するアシスト機構として、トーションバー12に入力される操舵トルクを磁気を介して検出する非接触式のトルクセンサ4と、検出された操舵トルクに応じて操舵補助トルクを出力する電動モータ(図示せず)とを有している。
【0023】
出力シャフト13の下端部にはウォームホイール40が連結される。このウォームホイール40に噛合するウォーム41が設けられ、このウォーム41が電動モータによって回転駆動される。電動モータの出力が、ウォーム41、ウォームホイール40を介して出力シャフト13に減速して伝達され、操舵補助トルクとして出力される。
【0024】
ウォームホイール40及びウォーム41は、ウォームケース42に収容される。ウォームケース42とギアケース30は、複数のボルト(図示せず)を介して締結され、両者の間に軸受32が挟持される。
【0025】
図1、図2に示すように、トルクセンサ4は、入力シャフト11と共に回転する磁気発生部50と、出力シャフト13と共に回転する回転磁気回路部60と、センサケース20に固定される固定磁気回路部70と、回転磁気回路部60と固定磁気回路部70の間に設けられる環状の磁気ギャップ(間隙)65、66と、固定磁気回路部70に導かれる磁束密度を検出する磁気センサ(図示せず)とを備える。トルクセンサ4は、トーションバー12に入力される操舵トルクを磁気センサの出力に基づいて検出する。
【0026】
なお、トルクセンサ4は、出力シャフト13に磁気発生部50を設け、入力シャフト11に回転磁気回路部60を設ける構成としてもよい。
【0027】
磁気発生部50は、入力シャフト11に圧入されるバックヨーク51と、接着剤を介してバックヨーク51の下端面に固定されるリング磁石52と、を備える。
【0028】
環状部材のリング磁石52は、ステアリングシャフト10の回転軸O方向へ向けて硬磁性体を着磁することによって形成される多極磁石である。リング磁石52には、例えば12個の磁極が周方向にわたって等間隔に形成される。つまり、リング磁石52の上端面及び下端面には、6個のN極と6個のS極が周方向に交互に配設される。リング磁石52に設けられる磁極数は、12個に限られず、必要に応じて任意に設定される。
【0029】
バックヨーク51は、リング磁石52の隣り合う磁極を結んで磁束を導く継鉄としての機能を有しており、リング磁石52の下端面である下部磁極面に磁力を集中させる。
【0030】
回転磁気回路部60は、リング磁石52から出される磁束を導く第一軟磁性リング61及び第二軟磁性リング62と、出力シャフト13に取り付けられる取付部材63(図1参照)と、取付部材63に第一軟磁性リング61及び第二軟磁性リング62を固定する樹脂モールド64と、を備える。
【0031】
図3に示すように、第一軟磁性リング61は、環状の第一磁路環部61Cと、第一磁路環部61Cから下向きに突出する6個の第一磁路柱部61Bと、各第一磁路柱部61Bの下端からそれぞれ内向きに屈折してリング磁石52の下端面に対峙する第一磁路端部61Aと、を備える。また、第二軟磁性リング62は、環状の第二磁路環部62Cと、第二磁路環部62Cから上向きに突出する6個の第二磁路柱部62Bと、各第二磁路柱部62Bの上端からそれぞれ内向きに屈折して、リング磁石52の下端面に対峙する第二磁路端部62Aと、を備える。
【0032】
第一磁路環部61C及び第二磁路環部62Cは、それぞれ全周がつながった環状部材であり、回転軸O方向に間隔をあけて配置される。第一磁路環部61Cは、リング磁石52の上方に設けられる。第二磁路環部62Cは、リング磁石52の下方に設けられる。
【0033】
第一磁路端部61Aと第二磁路端部62Aは、同一面上において交互に等しい角度間隔で並ぶように配置される。トーションバー12に操舵トルクが作用していない中立状態では、第一磁路端部61A及び第二磁路端部62Aの各中心線は、リング磁石52のN極とS極の境界を指すように設定されている。
【0034】
図1、図2に示すように、固定磁気回路部70は、第一軟磁性リング61の第一磁路環部61Cの外周に沿って設けられる第一集磁リング71と、第二軟磁性リング62の第二磁路環部62Cの外周に沿って設けられる第二集磁リング72と、第一集磁リング71に接続される第一集磁ヨーク(図示せず)と、第二集磁リング72に接続される第二集磁ヨーク(図示せず)と、を備える。
【0035】
第一集磁リング71及び第二集磁リング72は、回転磁気回路部60を取り囲むように配置される。第一集磁リング71の内周面は第一軟磁性リング61の第一磁路環部61Cに環状の磁気ギャップ65を介して対峙し、第二集磁リング72の内周面は第二軟磁性リング62の第二磁路環部62Cに環状の磁気ギャップ66を介して対峙する。
【0036】
図示しない第一集磁ヨーク及び第二集磁ヨークは、ブロック状の部材である。第一集磁ヨークは第一集磁リング71の外周面に当接するように設けられ、第二集磁ヨークは第二集磁リング72の外周面に当接するように設けられる。第一集磁ヨークと第二集磁ヨークとの間には、周方向に並ぶ一対の磁気ギャップ(図示せず)が形成される。各磁気ギャップ内には、磁気センサが一つずつ配置される。
【0037】
第一集磁ヨーク、第二集磁ヨーク、磁気センサ、及び磁気センサと接続する基板(図示せず)は、センサホルダ83に設置される。樹脂製のセンサホルダ83は、一対のボルト84を介して、金属製のセンサケース20に固定される。
【0038】
磁気センサは、ホール素子を通過する磁束密度に応じた電圧を信号としてコントローラ(図示せず)出力する。なお、磁気センサには、ホール素子の信号を増幅する回路、温度補償を行う回路、又はノイズフィルタの回路等を設けてもよい。
【0039】
次に、非接触式のトルクセンサ4がトーションバー12に入力される操舵トルクを磁気を介して検出する検出する機能について説明する。
【0040】
トーションバー12に操舵トルクが作用しない中立状態では、第一軟磁性リング61の第一磁路端部61A及び第二軟磁性リング62の第二磁路端部62Aは、それぞれリング磁石52のN極及びS極に同一の面積で対峙して両極を磁気短絡する。そのため、磁束は回転磁気回路部60及び固定磁気回路部70に導かれない。
【0041】
ステアリングホイールが操作され、トーションバー12に操舵トルクが一方向に入力される操舵時に、操舵トルクの方向に応じてトーションバー12が一方向にねじれ変形する。トーションバー12がねじれ変形すると、第一磁路端部61AがS極よりN極に大きな面積を持って対峙する一方、第二磁路端部62AがN極よりS極に大きな面積を持って対峙する。リング磁石52からの磁束は回転磁気回路部60と固定磁気回路部70に導かれ、磁気センサは磁場の大きさ及び方向に応じた信号を出力する。この場合における磁気経路は、N極から第一軟磁性リング61、第一集磁リング71、第一集磁ヨーク、磁気センサ、第二集磁ヨーク、第二集磁リング72、第二軟磁性リング62を経由してS極に向かう経路である。
【0042】
一方、ステアリングホイールが操作され、トーションバー12に上記とは逆方向の操舵トルクが入力される操舵時に、トーションバー12が逆方向にねじれ変形する。トーションバー12がねじれ変形すると、第一磁路端部61AがN極よりS極に大きな面積を持って対峙する一方、第二磁路端部62AがS極よりN極に大きな面積を持って対峙する。リング磁石52からの磁束は、上記の磁気経路と逆の磁気経路にて導かれる。磁気センサは、磁場の強さ及び方向に応じた信号を出力する。この場合における磁気経路は、N極から第二軟磁性リング62、第二集磁リング72、第二集磁ヨーク、磁気センサ、第一集磁ヨーク、第一集磁リング71、第一軟磁性リング61を経由してS極に向かう経路である。
【0043】
第一磁路端部61Aがリング磁石52のN極とS極に対峙する面積差、及び第二磁路端部62Aがリング磁石52のN極とS極に対峙する面積差が大きいほど、磁気ギャップの磁場は強くなる。磁気ギャップにおける磁場が強くなると、磁気センサの出力信号も増大する。
【0044】
トーションバー12に入力される操舵トルクは、磁気センサから出力された信号に基づいて検出される。
【0045】
ところで、従来のパワーステアリング装置は、ステアリングシャフトに操舵トルクが入力される操舵時に、ステアリングシャフトに付与される偶力によって軸受ガタ変位、または出力シャフトに曲げ弾性変形が生じてステアリングシャフトが屈曲すると、第一軟磁性リング、第二軟磁性リングが第一集磁リング、第二集磁リングに近づいて、環状の磁気ギャップ(65、66)の開口幅の変化し、トルクセンサ4の検出精度が悪化する可能性があった。
【0046】
本発明は、これに対処して、ハウジング3は、入力シャフト11を支持するセンサケース20を、出力シャフト13を支持するギアケース30に対して傾倒可能に連結する連結手段5を備え、伝達ロッド機構からステアリングシャフト10に付与される力によってセンサケース20がステアリングシャフト10と共に屈曲し、環状の磁気ギャップ65、66の開口幅が所定値に保たれる構成とする。
【0047】
連結手段5は、センサケース20とギアケース30を締結するボルト8(締結部材)と、センサケース20とギアケース30の間に介装されるガスケット7(弾性部材)と、を備える。
【0048】
ガスケット7は、耐熱性ゴム材を主体として形成され、センサケース20の端面20Aとギアケース30の端面30Aの間に圧縮して介装される。ガスケット7は、センサケース20とギアケース30の間で弾性変形する弾性部材として設けられる。
【0049】
環状のガスケット7は、センサケース20の端面20Aとギアケース30の端面30Aの全面に対峙するように介装される。これにより、センサケース20とギアケース30は、互いに当接する部位を持たない。
【0050】
ガスケット7の内周部にはOリング18が介装され、密封性が確保される。なお、これに限らず、Oリング18を廃止し、ガスケット7のみで密封性が確保される構成としてもよい。
【0051】
ハウジング3に出力シャフト13を支持する軸受31が介装される。軸受31は、ハウジング3に嵌合されるアウタレース31Aと、出力シャフト13に嵌合されるインナレース31Cと、アウタレース31Aとインナレース31Cの間に介装される複数のボール31Bと、を備える。
【0052】
軸受31は、センサケース20とギアケース30の間に介装される。センサケース20とギアケース30には、軸受31のアウタレース31Aに嵌合する環状凹部20B、30Bがそれぞれ形成される。環状凹部20B、30Bは、センサケース20の端面20Aとギアケース30の端面30Aにそれぞれ開口する。
【0053】
軸受31とガスケット7は、ステアリングシャフト10の径方向に並ぶように配置される。ガスケット7は、その軸方向中央部が軸受31の各ボール31Bの中心が配置される軸受中心面BCに近接するように配置される。これにより、センサケース20がギアケース30に対して傾倒するハウジング3の傾倒支点と、入力シャフト11と出力シャフト13が互いに屈曲するステアリングシャフト10の屈曲支点とが、ステアリングシャフト10の中心軸O方向について同位置になるように配置される。
【0054】
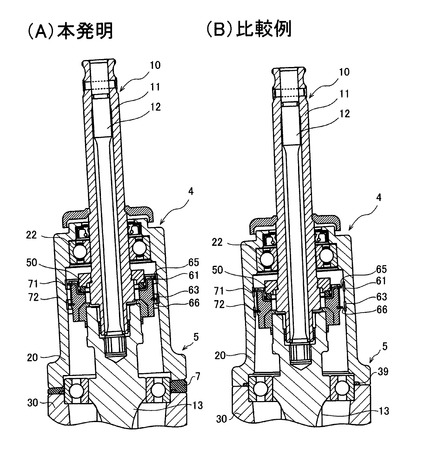
図4の(A)は、ステアリングシャフト10が回転する操舵時におけるパワーステアリング装置1の作動状態を示す縦断面図である。なお、この図4の(A)に示す各部の変位量は、便宜上、実際の寸法よりより大きくしている。これに示すように、伝達ロッド機構と共にステアリングシャフト10が回転する操舵時に、ステアリングシャフト10に付与される偶力によって軸受22、31、32のガタ変位、または出力シャフト13に曲がり弾性変形が生じると、入力シャフト11及び出力シャフト13の上部が軸受31を屈曲支点として屈曲し、センサケース20が入力シャフト11と共にガスケット7を弾性変形させてギアケース30の端面30Aに対して傾倒する。これにより、センサケース20に対する入力シャフト11の同心度が確保され、第一軟磁性リング61、第二軟磁性リング62と第一集磁リング71、第二集磁リング72の間に設けられる環状の磁気ギャップ65、66の開口幅の変化が抑えられ、トルクセンサ4の検出精度が維持される。
【0055】
これについて詳述すると、上記の操舵時に、伝達ロッド機構から加わる力によって、軸受31、32のガタ変位、または出力シャフト13に曲がり弾性変形が生じ、入力シャフト11が出力シャフト13の下部に対して軸受31を屈曲支点として屈曲するため、ステアリングシャフト10の屈曲支点は、出力シャフト13が軸受31に支持される部位となる。
【0056】
このとき、センサケース20が入力シャフト11と共にガスケット7を弾性変形させてギアケース30の端面30Aに対して傾倒するため、ハウジング3の傾倒支点は、ガスケット7が介在する部位となる。
【0057】
軸受31とガスケット7は、ステアリングシャフト10の径方向に並ぶように配置される構成としたため、センサケース20がギアケース30に対して傾倒するハウジング3の傾倒支点が、入力シャフト11と出力シャフト13が互いに屈曲するステアリングシャフト10の屈曲支点と略同位置にあり、センサケース20に対する入力シャフト11の同心度が確保され、環状の磁気ギャップ65、66の開口幅の変化が抑えられる。
【0058】
図4の(B)は、比較例の作動状態を示す縦断面図である。このパワーステアリング装置は、センサケース20の端面20Aとギアケース30の端面30Aとが互いに当接して締結され、両者の間にシールリング39が介装されるものである。このハウジングは、センサケース20とギアケース30が互いに固定されている。この場合に、伝達ロッド機構と共にステアリングシャフト10が回転する操舵時に、ステアリングシャフト10に付与される偶力によって軸受31、32のガタ変位、または出力シャフト13に撓みが生じると、入力シャフト11が出力シャフト13の下部に対して軸受31を屈曲支点として屈曲するが、センサケース20がギアケース30に対して傾倒することができず、環状の磁気ギャップ65、66の開口幅が変化し、トルクセンサ4の検出精度が悪化する。図4の(B)は、第一軟磁性リング61及び第二軟磁性リング62の一部が、第一集磁リング71及び第二集磁リング72に接した作動状態を示している。
【0059】
なお、連結手段5は、ガスケット7に限らず、他の構成としてもよい。例えば、連結手段5は、センサケース20またはギアケース30には、両者の当接部の近傍にスリットを形成し、このスリットが形成された部位を撓み変形させる構成としてもよい。また、連結手段5は、センサケース20とギアケース30の間に撓み変形するカップリングを介装する構成としてもよい。
【0060】
本発明のパワーステアリング装置1によれば、以下の効果が得られる。
【0061】
(ア)操舵トルクを転舵機構に伝達するステアリングシャフト10と、ステアリングシャフト10を収容するハウジング3と、ステアリングシャフト10に入力される操舵トルクを磁気を介して検出する非接触式のトルクセンサ4と、を備えるパワーステアリング装置1であって、ステアリングシャフト10は、操舵トルクが入力される入力シャフト11と、転舵機構に転舵力を出力する出力シャフト13と、入力シャフト11と出力シャフト13の間で操舵トルクを伝達するトーションバー12と、を備え、ハウジング3は、入力シャフト11を回転可能に支持するセンサケース20と、出力シャフト13を回転可能に支持するギアケース30と、センサケース20とギアケース30とを互いに傾倒可能に連結する連結手段5と、を備える構成としたため、操舵時にステアリングシャフト10に付与される力によってセンサケース20が入力シャフト11と共に傾倒する。これにより、操舵時にハウジング3に対するステアリングシャフト10の同心度が確保され、トルクセンサ4の磁気回路が正常に保たれ、トルクセンサ4の検出精度が維持される。
【0062】
(イ)連結手段5は、センサケース20とギアケース30を締結する締結部材(ボルト8)と、センサケース20とギアケース30の間に介装される弾性部材(ガスケット7)と、を備える構成としたため、操舵時にステアリングシャフト10に付与される力によってセンサケース20が弾性部材(ガスケット7)を弾性変形させて入力シャフト11と共に傾倒する。これにより、操舵時にハウジング3に対するステアリングシャフト10の同心度が確保され、トルクセンサ4の磁気回路が正常に保たれ、トルクセンサ4の検出精度が維持される。
【0063】
(ウ)センサケース20とギアケース30の間に出力シャフト13を支持する軸受31が介装され、軸受31と弾性部材(ガスケット7)とが互いにステアリングシャフト10の径方向に並ぶように配置される構成としたため、ハウジング3が弾性部材(ガスケット7)を介して傾倒する傾倒支点とステアリングシャフト10が軸受31を介して屈曲する屈曲支点とがステアリングシャフト10の中心軸O方向について同位置に配置され、操舵時にハウジング3に対するステアリングシャフト10の同心度が確保され、トルクセンサ4の磁気回路が正常に保たれ、トルクセンサ4の検出精度が維持される。
【0064】
(エ)ハウジング3が連結手段5を介して傾倒する傾倒支点とステアリングシャフト10が屈曲する屈曲支点とがステアリングシャフト10の中心軸O方向について同位置に配置されるため、操舵時にハウジング3に対するステアリングシャフト10の同心度が確保され、トルクセンサ4の磁気回路が正常に保たれ、トルクセンサ4の検出精度が維持される。
【0065】
本発明は上記の実施形態に限定されずに、その技術的な思想の範囲内において種々の変更がなしうることは明白である。
【0066】
例えば、トルクセンサの磁気発生部は、ステアリングシャフトの径方向へ向けて硬磁性体を着磁することによって形成される多極磁石を用いてもよい。
【産業上の利用可能性】
【0067】
本発明は、車両または他の機械、設備のパワーステアリング装置に用いられる。
【符号の説明】
【0068】
1 パワーステアリング装置
3 ハウジング
4 トルクセンサ
5 連結手段
7 ガスケット(弾性部材)
8 ボルト(締結部材)
10 ステアリングシャフト
11 入力シャフト
12 トーションバー
13 出力シャフト
20 センサケース
30 ギアケース
31 軸受
61 第一軟磁性リング
62 第二軟磁性リング
65 磁気ギャップ
66 磁気ギャップ
71 第一集磁リング
72 第二集磁リング
【技術分野】
【0001】
本発明は、車両のパワーステアリング装置に関するものである。
【背景技術】
【0002】
従来の電動パワーステアリング装置は、操舵トルクを転舵機構に伝達するステアリングシャフトと、ステアリングシャフトを収容するハウジングと、ステアリングシャフトに入力される操舵トルクを磁気を介して検出する非接触式のトルクセンサと、を備えるものがある(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−241343号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、このような従来のパワーステアリング装置にあっては、ステアリングシャフトに操舵トルクが入力される操舵時に、ステアリングシャフトに付与される偶力によってステアリングシャフトがわずかに屈曲すると、ハウジングとステアリングシャフトの間に設けられる環状の磁気ギャップの開口幅が変化し、トルクセンサの検出精度が悪化するという問題点があった。
【0005】
本発明は上記の問題点に鑑みてなされたものであり、トルクセンサの検出精度が維持されるパワーステアリング装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明は、操舵トルクを転舵機構に伝達するステアリングシャフトと、ステアリングシャフトを収容するハウジングと、ステアリングシャフトに入力される操舵トルクを磁気を介して検出する非接触式のトルクセンサと、を備えるパワーステアリング装置であって、ステアリングシャフトは、操舵トルクが入力される入力シャフトと、転舵機構に転舵力を出力する出力シャフトと、入力シャフトと出力シャフトの間で操舵トルクを伝達するトーションバーと、を備え、ハウジングは、入力シャフトを回転可能に支持するセンサケースと、出力シャフトを回転可能に支持するギアケースと、センサケースとギアケースとを互いに傾倒可能に連結する連結手段と、を備えることを特徴とする。
【発明の効果】
【0007】
本発明によると、操舵時にステアリングシャフトに付与される力によってセンサケースが入力シャフトと共に傾倒することで、ハウジングに対するステアリングシャフトの同心度が確保され、トルクセンサの磁気回路が正常に保たれ、トルクセンサの検出精度が維持される。
【図面の簡単な説明】
【0008】
【図1】本発明の実施形態を示すパワーステアリング装置の縦断面図である。
【図2】ギアケースを取り除いた状態におけるパワーステアリング装置の分解斜視図である。
【図3】回転磁気回路部の斜視図である。
【図4】(A)、(B)は、操舵時におけるパワーステアリング装置の縦断面図である。
【発明を実施するための形態】
【0009】
図面を参照して、本発明の実施形態による車両用のパワーステアリング装置1を説明する。
【0010】
図1及び図2に示すように、パワーステアリング装置1は、操舵力によって回転するステアリングシャフト10と、車輪の転舵機構(図示せず)に連係するラックシャフト2とを備え、ステアリングシャフト10の回転によってラックシャフト2を軸方向に移動させて車輪を操舵する装置である。
【0011】
ステアリングシャフト10を収容するハウジング3は、複数のボルト8(図2参照)によって連結される上部のセンサケース20及び下部のギアケース30を備える。ギアケース30が車体(図示せず)に支持される。センサケース20及びギアケース30は非磁性体のアルミ合金等によって形成される。
【0012】
ステアリングシャフト10は、ハウジング3によって支持される軸部材である。ステアリングシャフト10は、伝達ロッド機構(図示せず)から操舵トルクが入力される入力シャフト11と、トーションバー12と、車輪の転舵機構に転舵力を出力する出力シャフト13と、を備える。伝達ロッド機構には、運転者によって操舵されるステアリングホイール(図示せず)から操舵トルクが入力される。
【0013】
入力シャフト11は、転がり式の軸受22を介してセンサケース20に回転自在に支持される。入力シャフト11とセンサケース20との間はダストシール23によってシールされる。ダストシール23は、軸受22の上方に配設されている。
【0014】
入力シャフト11には、センサケース20から突出する部位に鍔状のカバー29が取り付けられる。カバー29によってセンサケース20の開口端部が覆われている。
【0015】
出力シャフト13は、その上部に設けられる転がり式の軸受31と、その下部に設けられる転がり式の軸受32とによって回転自在に支持される。
【0016】
出力シャフト13の上端部には、入力シャフト11の下端部を収容可能な収容室13Aが形成されている。出力シャフト13の収容室13Aの内周面と、入力シャフト11の下端部の外周面との間には、滑り軸受14が介装される。これにより、入力シャフト11及び出力シャフト13は、同一軸上で相対回転可能となる。
【0017】
入力シャフト11は円筒状に形成されており、入力シャフト11の内部にはトーションバー12が同一軸上に収められる。トーションバー12の上端部は、ピン15を介して、入力シャフト11の上端部に連結される。
【0018】
トーションバー12の下端部は、入力シャフト11の下端開口部より下方に突出する。トーションバー12の下端部の外周面には、セレーション12Aが形成されている。トーションバー12の下端部は、セレーション12Aを介して、収容室13Aの底部に形成された係合孔13Bに連結される。
【0019】
トーションバー12は、入力シャフト11に入力される操舵トルクを出力シャフト13に伝達すると共に、そのトルクに応じて回転軸Oを中心にねじれ変形する。
【0020】
出力シャフト13は、下端寄りの外周面にギア13Cを備える。出力シャフト13のギア13Cは、ラックシャフト2に形成されたラックギア2Aと噛合する。入力シャフト11の回転に伴って出力シャフト13が回転することで、ラックシャフト2が軸方向(略水平方向)に移動し、車輪が操舵される。
【0021】
ギアケース30には、ラックシャフト2の外周面に摺接するプレッシャパッド45と、このプレッシャパッド45を付勢するスプリング46が設けられる。スプリング46のバネ力によってプレッシャパッド45がラックシャフト2の外周面に押し付けられ、ラックギア2Aが出力シャフト13のギア13Cに押し付けられ、ギア13Cに対するラックギア2Aのバックラッシュが零に保たれる。
【0022】
パワーステアリング装置1は、操舵トルクを補助的に出力するアシスト機構として、トーションバー12に入力される操舵トルクを磁気を介して検出する非接触式のトルクセンサ4と、検出された操舵トルクに応じて操舵補助トルクを出力する電動モータ(図示せず)とを有している。
【0023】
出力シャフト13の下端部にはウォームホイール40が連結される。このウォームホイール40に噛合するウォーム41が設けられ、このウォーム41が電動モータによって回転駆動される。電動モータの出力が、ウォーム41、ウォームホイール40を介して出力シャフト13に減速して伝達され、操舵補助トルクとして出力される。
【0024】
ウォームホイール40及びウォーム41は、ウォームケース42に収容される。ウォームケース42とギアケース30は、複数のボルト(図示せず)を介して締結され、両者の間に軸受32が挟持される。
【0025】
図1、図2に示すように、トルクセンサ4は、入力シャフト11と共に回転する磁気発生部50と、出力シャフト13と共に回転する回転磁気回路部60と、センサケース20に固定される固定磁気回路部70と、回転磁気回路部60と固定磁気回路部70の間に設けられる環状の磁気ギャップ(間隙)65、66と、固定磁気回路部70に導かれる磁束密度を検出する磁気センサ(図示せず)とを備える。トルクセンサ4は、トーションバー12に入力される操舵トルクを磁気センサの出力に基づいて検出する。
【0026】
なお、トルクセンサ4は、出力シャフト13に磁気発生部50を設け、入力シャフト11に回転磁気回路部60を設ける構成としてもよい。
【0027】
磁気発生部50は、入力シャフト11に圧入されるバックヨーク51と、接着剤を介してバックヨーク51の下端面に固定されるリング磁石52と、を備える。
【0028】
環状部材のリング磁石52は、ステアリングシャフト10の回転軸O方向へ向けて硬磁性体を着磁することによって形成される多極磁石である。リング磁石52には、例えば12個の磁極が周方向にわたって等間隔に形成される。つまり、リング磁石52の上端面及び下端面には、6個のN極と6個のS極が周方向に交互に配設される。リング磁石52に設けられる磁極数は、12個に限られず、必要に応じて任意に設定される。
【0029】
バックヨーク51は、リング磁石52の隣り合う磁極を結んで磁束を導く継鉄としての機能を有しており、リング磁石52の下端面である下部磁極面に磁力を集中させる。
【0030】
回転磁気回路部60は、リング磁石52から出される磁束を導く第一軟磁性リング61及び第二軟磁性リング62と、出力シャフト13に取り付けられる取付部材63(図1参照)と、取付部材63に第一軟磁性リング61及び第二軟磁性リング62を固定する樹脂モールド64と、を備える。
【0031】
図3に示すように、第一軟磁性リング61は、環状の第一磁路環部61Cと、第一磁路環部61Cから下向きに突出する6個の第一磁路柱部61Bと、各第一磁路柱部61Bの下端からそれぞれ内向きに屈折してリング磁石52の下端面に対峙する第一磁路端部61Aと、を備える。また、第二軟磁性リング62は、環状の第二磁路環部62Cと、第二磁路環部62Cから上向きに突出する6個の第二磁路柱部62Bと、各第二磁路柱部62Bの上端からそれぞれ内向きに屈折して、リング磁石52の下端面に対峙する第二磁路端部62Aと、を備える。
【0032】
第一磁路環部61C及び第二磁路環部62Cは、それぞれ全周がつながった環状部材であり、回転軸O方向に間隔をあけて配置される。第一磁路環部61Cは、リング磁石52の上方に設けられる。第二磁路環部62Cは、リング磁石52の下方に設けられる。
【0033】
第一磁路端部61Aと第二磁路端部62Aは、同一面上において交互に等しい角度間隔で並ぶように配置される。トーションバー12に操舵トルクが作用していない中立状態では、第一磁路端部61A及び第二磁路端部62Aの各中心線は、リング磁石52のN極とS極の境界を指すように設定されている。
【0034】
図1、図2に示すように、固定磁気回路部70は、第一軟磁性リング61の第一磁路環部61Cの外周に沿って設けられる第一集磁リング71と、第二軟磁性リング62の第二磁路環部62Cの外周に沿って設けられる第二集磁リング72と、第一集磁リング71に接続される第一集磁ヨーク(図示せず)と、第二集磁リング72に接続される第二集磁ヨーク(図示せず)と、を備える。
【0035】
第一集磁リング71及び第二集磁リング72は、回転磁気回路部60を取り囲むように配置される。第一集磁リング71の内周面は第一軟磁性リング61の第一磁路環部61Cに環状の磁気ギャップ65を介して対峙し、第二集磁リング72の内周面は第二軟磁性リング62の第二磁路環部62Cに環状の磁気ギャップ66を介して対峙する。
【0036】
図示しない第一集磁ヨーク及び第二集磁ヨークは、ブロック状の部材である。第一集磁ヨークは第一集磁リング71の外周面に当接するように設けられ、第二集磁ヨークは第二集磁リング72の外周面に当接するように設けられる。第一集磁ヨークと第二集磁ヨークとの間には、周方向に並ぶ一対の磁気ギャップ(図示せず)が形成される。各磁気ギャップ内には、磁気センサが一つずつ配置される。
【0037】
第一集磁ヨーク、第二集磁ヨーク、磁気センサ、及び磁気センサと接続する基板(図示せず)は、センサホルダ83に設置される。樹脂製のセンサホルダ83は、一対のボルト84を介して、金属製のセンサケース20に固定される。
【0038】
磁気センサは、ホール素子を通過する磁束密度に応じた電圧を信号としてコントローラ(図示せず)出力する。なお、磁気センサには、ホール素子の信号を増幅する回路、温度補償を行う回路、又はノイズフィルタの回路等を設けてもよい。
【0039】
次に、非接触式のトルクセンサ4がトーションバー12に入力される操舵トルクを磁気を介して検出する検出する機能について説明する。
【0040】
トーションバー12に操舵トルクが作用しない中立状態では、第一軟磁性リング61の第一磁路端部61A及び第二軟磁性リング62の第二磁路端部62Aは、それぞれリング磁石52のN極及びS極に同一の面積で対峙して両極を磁気短絡する。そのため、磁束は回転磁気回路部60及び固定磁気回路部70に導かれない。
【0041】
ステアリングホイールが操作され、トーションバー12に操舵トルクが一方向に入力される操舵時に、操舵トルクの方向に応じてトーションバー12が一方向にねじれ変形する。トーションバー12がねじれ変形すると、第一磁路端部61AがS極よりN極に大きな面積を持って対峙する一方、第二磁路端部62AがN極よりS極に大きな面積を持って対峙する。リング磁石52からの磁束は回転磁気回路部60と固定磁気回路部70に導かれ、磁気センサは磁場の大きさ及び方向に応じた信号を出力する。この場合における磁気経路は、N極から第一軟磁性リング61、第一集磁リング71、第一集磁ヨーク、磁気センサ、第二集磁ヨーク、第二集磁リング72、第二軟磁性リング62を経由してS極に向かう経路である。
【0042】
一方、ステアリングホイールが操作され、トーションバー12に上記とは逆方向の操舵トルクが入力される操舵時に、トーションバー12が逆方向にねじれ変形する。トーションバー12がねじれ変形すると、第一磁路端部61AがN極よりS極に大きな面積を持って対峙する一方、第二磁路端部62AがS極よりN極に大きな面積を持って対峙する。リング磁石52からの磁束は、上記の磁気経路と逆の磁気経路にて導かれる。磁気センサは、磁場の強さ及び方向に応じた信号を出力する。この場合における磁気経路は、N極から第二軟磁性リング62、第二集磁リング72、第二集磁ヨーク、磁気センサ、第一集磁ヨーク、第一集磁リング71、第一軟磁性リング61を経由してS極に向かう経路である。
【0043】
第一磁路端部61Aがリング磁石52のN極とS極に対峙する面積差、及び第二磁路端部62Aがリング磁石52のN極とS極に対峙する面積差が大きいほど、磁気ギャップの磁場は強くなる。磁気ギャップにおける磁場が強くなると、磁気センサの出力信号も増大する。
【0044】
トーションバー12に入力される操舵トルクは、磁気センサから出力された信号に基づいて検出される。
【0045】
ところで、従来のパワーステアリング装置は、ステアリングシャフトに操舵トルクが入力される操舵時に、ステアリングシャフトに付与される偶力によって軸受ガタ変位、または出力シャフトに曲げ弾性変形が生じてステアリングシャフトが屈曲すると、第一軟磁性リング、第二軟磁性リングが第一集磁リング、第二集磁リングに近づいて、環状の磁気ギャップ(65、66)の開口幅の変化し、トルクセンサ4の検出精度が悪化する可能性があった。
【0046】
本発明は、これに対処して、ハウジング3は、入力シャフト11を支持するセンサケース20を、出力シャフト13を支持するギアケース30に対して傾倒可能に連結する連結手段5を備え、伝達ロッド機構からステアリングシャフト10に付与される力によってセンサケース20がステアリングシャフト10と共に屈曲し、環状の磁気ギャップ65、66の開口幅が所定値に保たれる構成とする。
【0047】
連結手段5は、センサケース20とギアケース30を締結するボルト8(締結部材)と、センサケース20とギアケース30の間に介装されるガスケット7(弾性部材)と、を備える。
【0048】
ガスケット7は、耐熱性ゴム材を主体として形成され、センサケース20の端面20Aとギアケース30の端面30Aの間に圧縮して介装される。ガスケット7は、センサケース20とギアケース30の間で弾性変形する弾性部材として設けられる。
【0049】
環状のガスケット7は、センサケース20の端面20Aとギアケース30の端面30Aの全面に対峙するように介装される。これにより、センサケース20とギアケース30は、互いに当接する部位を持たない。
【0050】
ガスケット7の内周部にはOリング18が介装され、密封性が確保される。なお、これに限らず、Oリング18を廃止し、ガスケット7のみで密封性が確保される構成としてもよい。
【0051】
ハウジング3に出力シャフト13を支持する軸受31が介装される。軸受31は、ハウジング3に嵌合されるアウタレース31Aと、出力シャフト13に嵌合されるインナレース31Cと、アウタレース31Aとインナレース31Cの間に介装される複数のボール31Bと、を備える。
【0052】
軸受31は、センサケース20とギアケース30の間に介装される。センサケース20とギアケース30には、軸受31のアウタレース31Aに嵌合する環状凹部20B、30Bがそれぞれ形成される。環状凹部20B、30Bは、センサケース20の端面20Aとギアケース30の端面30Aにそれぞれ開口する。
【0053】
軸受31とガスケット7は、ステアリングシャフト10の径方向に並ぶように配置される。ガスケット7は、その軸方向中央部が軸受31の各ボール31Bの中心が配置される軸受中心面BCに近接するように配置される。これにより、センサケース20がギアケース30に対して傾倒するハウジング3の傾倒支点と、入力シャフト11と出力シャフト13が互いに屈曲するステアリングシャフト10の屈曲支点とが、ステアリングシャフト10の中心軸O方向について同位置になるように配置される。
【0054】
図4の(A)は、ステアリングシャフト10が回転する操舵時におけるパワーステアリング装置1の作動状態を示す縦断面図である。なお、この図4の(A)に示す各部の変位量は、便宜上、実際の寸法よりより大きくしている。これに示すように、伝達ロッド機構と共にステアリングシャフト10が回転する操舵時に、ステアリングシャフト10に付与される偶力によって軸受22、31、32のガタ変位、または出力シャフト13に曲がり弾性変形が生じると、入力シャフト11及び出力シャフト13の上部が軸受31を屈曲支点として屈曲し、センサケース20が入力シャフト11と共にガスケット7を弾性変形させてギアケース30の端面30Aに対して傾倒する。これにより、センサケース20に対する入力シャフト11の同心度が確保され、第一軟磁性リング61、第二軟磁性リング62と第一集磁リング71、第二集磁リング72の間に設けられる環状の磁気ギャップ65、66の開口幅の変化が抑えられ、トルクセンサ4の検出精度が維持される。
【0055】
これについて詳述すると、上記の操舵時に、伝達ロッド機構から加わる力によって、軸受31、32のガタ変位、または出力シャフト13に曲がり弾性変形が生じ、入力シャフト11が出力シャフト13の下部に対して軸受31を屈曲支点として屈曲するため、ステアリングシャフト10の屈曲支点は、出力シャフト13が軸受31に支持される部位となる。
【0056】
このとき、センサケース20が入力シャフト11と共にガスケット7を弾性変形させてギアケース30の端面30Aに対して傾倒するため、ハウジング3の傾倒支点は、ガスケット7が介在する部位となる。
【0057】
軸受31とガスケット7は、ステアリングシャフト10の径方向に並ぶように配置される構成としたため、センサケース20がギアケース30に対して傾倒するハウジング3の傾倒支点が、入力シャフト11と出力シャフト13が互いに屈曲するステアリングシャフト10の屈曲支点と略同位置にあり、センサケース20に対する入力シャフト11の同心度が確保され、環状の磁気ギャップ65、66の開口幅の変化が抑えられる。
【0058】
図4の(B)は、比較例の作動状態を示す縦断面図である。このパワーステアリング装置は、センサケース20の端面20Aとギアケース30の端面30Aとが互いに当接して締結され、両者の間にシールリング39が介装されるものである。このハウジングは、センサケース20とギアケース30が互いに固定されている。この場合に、伝達ロッド機構と共にステアリングシャフト10が回転する操舵時に、ステアリングシャフト10に付与される偶力によって軸受31、32のガタ変位、または出力シャフト13に撓みが生じると、入力シャフト11が出力シャフト13の下部に対して軸受31を屈曲支点として屈曲するが、センサケース20がギアケース30に対して傾倒することができず、環状の磁気ギャップ65、66の開口幅が変化し、トルクセンサ4の検出精度が悪化する。図4の(B)は、第一軟磁性リング61及び第二軟磁性リング62の一部が、第一集磁リング71及び第二集磁リング72に接した作動状態を示している。
【0059】
なお、連結手段5は、ガスケット7に限らず、他の構成としてもよい。例えば、連結手段5は、センサケース20またはギアケース30には、両者の当接部の近傍にスリットを形成し、このスリットが形成された部位を撓み変形させる構成としてもよい。また、連結手段5は、センサケース20とギアケース30の間に撓み変形するカップリングを介装する構成としてもよい。
【0060】
本発明のパワーステアリング装置1によれば、以下の効果が得られる。
【0061】
(ア)操舵トルクを転舵機構に伝達するステアリングシャフト10と、ステアリングシャフト10を収容するハウジング3と、ステアリングシャフト10に入力される操舵トルクを磁気を介して検出する非接触式のトルクセンサ4と、を備えるパワーステアリング装置1であって、ステアリングシャフト10は、操舵トルクが入力される入力シャフト11と、転舵機構に転舵力を出力する出力シャフト13と、入力シャフト11と出力シャフト13の間で操舵トルクを伝達するトーションバー12と、を備え、ハウジング3は、入力シャフト11を回転可能に支持するセンサケース20と、出力シャフト13を回転可能に支持するギアケース30と、センサケース20とギアケース30とを互いに傾倒可能に連結する連結手段5と、を備える構成としたため、操舵時にステアリングシャフト10に付与される力によってセンサケース20が入力シャフト11と共に傾倒する。これにより、操舵時にハウジング3に対するステアリングシャフト10の同心度が確保され、トルクセンサ4の磁気回路が正常に保たれ、トルクセンサ4の検出精度が維持される。
【0062】
(イ)連結手段5は、センサケース20とギアケース30を締結する締結部材(ボルト8)と、センサケース20とギアケース30の間に介装される弾性部材(ガスケット7)と、を備える構成としたため、操舵時にステアリングシャフト10に付与される力によってセンサケース20が弾性部材(ガスケット7)を弾性変形させて入力シャフト11と共に傾倒する。これにより、操舵時にハウジング3に対するステアリングシャフト10の同心度が確保され、トルクセンサ4の磁気回路が正常に保たれ、トルクセンサ4の検出精度が維持される。
【0063】
(ウ)センサケース20とギアケース30の間に出力シャフト13を支持する軸受31が介装され、軸受31と弾性部材(ガスケット7)とが互いにステアリングシャフト10の径方向に並ぶように配置される構成としたため、ハウジング3が弾性部材(ガスケット7)を介して傾倒する傾倒支点とステアリングシャフト10が軸受31を介して屈曲する屈曲支点とがステアリングシャフト10の中心軸O方向について同位置に配置され、操舵時にハウジング3に対するステアリングシャフト10の同心度が確保され、トルクセンサ4の磁気回路が正常に保たれ、トルクセンサ4の検出精度が維持される。
【0064】
(エ)ハウジング3が連結手段5を介して傾倒する傾倒支点とステアリングシャフト10が屈曲する屈曲支点とがステアリングシャフト10の中心軸O方向について同位置に配置されるため、操舵時にハウジング3に対するステアリングシャフト10の同心度が確保され、トルクセンサ4の磁気回路が正常に保たれ、トルクセンサ4の検出精度が維持される。
【0065】
本発明は上記の実施形態に限定されずに、その技術的な思想の範囲内において種々の変更がなしうることは明白である。
【0066】
例えば、トルクセンサの磁気発生部は、ステアリングシャフトの径方向へ向けて硬磁性体を着磁することによって形成される多極磁石を用いてもよい。
【産業上の利用可能性】
【0067】
本発明は、車両または他の機械、設備のパワーステアリング装置に用いられる。
【符号の説明】
【0068】
1 パワーステアリング装置
3 ハウジング
4 トルクセンサ
5 連結手段
7 ガスケット(弾性部材)
8 ボルト(締結部材)
10 ステアリングシャフト
11 入力シャフト
12 トーションバー
13 出力シャフト
20 センサケース
30 ギアケース
31 軸受
61 第一軟磁性リング
62 第二軟磁性リング
65 磁気ギャップ
66 磁気ギャップ
71 第一集磁リング
72 第二集磁リング
【特許請求の範囲】
【請求項1】
操舵トルクを転舵機構に伝達するステアリングシャフトと、
前記ステアリングシャフトを収容するハウジングと、
前記ステアリングシャフトに入力される操舵トルクを磁気を介して検出する非接触式のトルクセンサと、を備えるパワーステアリング装置であって、
前記ステアリングシャフトは、
操舵トルクが入力される入力シャフトと、
前記転舵機構に転舵力を出力する出力シャフトと、
前記入力シャフトと前記出力シャフトの間で操舵トルクを伝達するトーションバーと、を備え、
前記ハウジングは、
前記入力シャフトを回転可能に支持するセンサケースと、
前記出力シャフトを回転可能に支持するギアケースと、
前記センサケースと前記ギアケースとを互いに傾倒可能に連結する連結手段と、を備えることを特徴とするパワーステアリング装置。
【請求項2】
前記連結手段は、
前記センサケースと前記ギアケースを締結する締結部材と、
前記センサケースと前記ギアケースの間に介装される弾性部材と、を備えることを特徴とする請求項1に記載のパワーステアリング装置。
【請求項3】
前記センサケースと前記ギアケースの間に前記出力シャフトを支持する軸受が介装され、
前記軸受と前記弾性部材とが前記ステアリングシャフトの径方向に並ぶように配置されることを特徴とする請求項2に記載のパワーステアリング装置。
【請求項4】
前記ハウジングが前記連結手段を介して傾倒する傾倒支点と、前記ステアリングシャフトが屈曲する屈曲支点と、が前記ステアリングシャフトの中心軸方向について同位置に配置されることを特徴とする請求項1から3のいずれか一つに記載のパワーステアリング装置。
【請求項1】
操舵トルクを転舵機構に伝達するステアリングシャフトと、
前記ステアリングシャフトを収容するハウジングと、
前記ステアリングシャフトに入力される操舵トルクを磁気を介して検出する非接触式のトルクセンサと、を備えるパワーステアリング装置であって、
前記ステアリングシャフトは、
操舵トルクが入力される入力シャフトと、
前記転舵機構に転舵力を出力する出力シャフトと、
前記入力シャフトと前記出力シャフトの間で操舵トルクを伝達するトーションバーと、を備え、
前記ハウジングは、
前記入力シャフトを回転可能に支持するセンサケースと、
前記出力シャフトを回転可能に支持するギアケースと、
前記センサケースと前記ギアケースとを互いに傾倒可能に連結する連結手段と、を備えることを特徴とするパワーステアリング装置。
【請求項2】
前記連結手段は、
前記センサケースと前記ギアケースを締結する締結部材と、
前記センサケースと前記ギアケースの間に介装される弾性部材と、を備えることを特徴とする請求項1に記載のパワーステアリング装置。
【請求項3】
前記センサケースと前記ギアケースの間に前記出力シャフトを支持する軸受が介装され、
前記軸受と前記弾性部材とが前記ステアリングシャフトの径方向に並ぶように配置されることを特徴とする請求項2に記載のパワーステアリング装置。
【請求項4】
前記ハウジングが前記連結手段を介して傾倒する傾倒支点と、前記ステアリングシャフトが屈曲する屈曲支点と、が前記ステアリングシャフトの中心軸方向について同位置に配置されることを特徴とする請求項1から3のいずれか一つに記載のパワーステアリング装置。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2013−29357(P2013−29357A)
【公開日】平成25年2月7日(2013.2.7)
【国際特許分類】
【出願番号】特願2011−164348(P2011−164348)
【出願日】平成23年7月27日(2011.7.27)
【出願人】(000000929)カヤバ工業株式会社 (2,151)
【Fターム(参考)】
【公開日】平成25年2月7日(2013.2.7)
【国際特許分類】
【出願日】平成23年7月27日(2011.7.27)
【出願人】(000000929)カヤバ工業株式会社 (2,151)
【Fターム(参考)】
[ Back to top ]