
フォークリフトにおけるロードスタビライザの制御装置
【発明の詳細な説明】
【0001】
【産業上の利用分野】本発明はフォークリフトにおけるロードスタビライザの制御装置に関し、特に押え板を跳ね上げる形式のロードスタビライザに適用して有用なものである。
【0002】
【従来の技術】フォークリフトは、積載した荷物を上下させるためのマストを車体の前方に備え、場所間の移動ができるようにした荷役用の産業車両である。
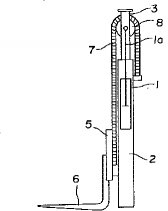
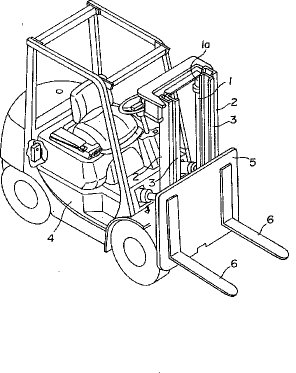
【0003】図4は標準形のフォークリフトの一例を示す斜視図である。同図に示すように、リフトシリンダ1は左右一対のアウターマスト2に固定され、ピストンロッド1aの伸縮に伴ないアウターマスト2をガイドとして左右一対のインナーマスト3を昇降するようになっている。このとき、アウターマスト2は車体4の前方でこの車体4に固定してある。この結果、インナーマスト3の昇降に伴ないチェーン(図4には図示を省略してある)に懸架してあるブラケット5及び直接荷物を積載するフォーク6からなる昇降部が昇降する。
【0004】さらに詳言すると、図5に概念的に示すように、フォーク6はその基端部がブラケット5に固着されて前方に突出しており、ブラケット5と一体的にチェーン7に懸架してある。このとき、チェーン7は、インナーマスト3に回動可能に支承したチェーンホイール8に懸架するとともに、一端をブラケット5に、他端をアウターマスト2にそれぞれ固定してある。
【0005】かくして、昇降部であるブラケット5及びフォーク6は、インナーマスト3の上昇に伴ない上昇するばかりでなく、固定部(アウターマスト2)に対しチェーンホイール8が上昇することによりインナーマスト3に対する相対位置が上昇する。すなわち、昇降部の地表面に対する上昇量は、インナーマスト3の上昇分にチェーン7の長さで規定される昇降部のインナーマスト3に対する相対上昇分を加えた量となる。
【0006】上述のフォークリフトは標準形のものであるが、このフォークリフトは、一般に、搬送する荷物の形状に合わせた各種のアタッチメントを取付け得るようになっている。この種のアタッチメントの一種としてロードスタビライザがある。
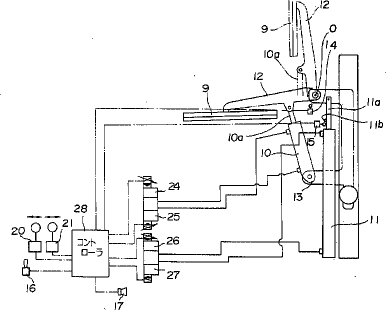
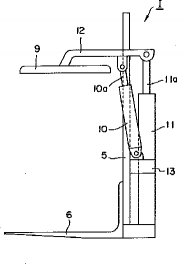
【0007】図6はロードスタビライザの一例を概念的に示す説明図である。同図に示すように、このロードスタビライザIは、押え板9、この押え板9の跳ね上げ用シリンダ10及び押え板9の昇降用シリンダ11を主な構成要素とするもので、ブラケット5及びフォーク6からなる昇降部と一体的にインナマスト(図示せず)に沿い昇降するように構成してある。すなわち、昇降用シリンダ11はブラケット5及びフォーク6と一体となっている。また、押え板9は、基端部を昇降用シリンダ11のピストンロッド11aの先端部に回動可能に固定した支持アーム12に支持してある。跳ね上げ用シリンダ10は、その基端部を支持部材13に、またそのピストンロッド10aの先端部を支持アーム12の中央部にそれぞれ回動可能に固定してある。
【0008】かくして、押え板9、跳ね上げ用シリンダ10、支持アーム12及び支持部材13は、昇降用シリンダ11の駆動によるピストンロッド11aの伸縮に伴ない一体的に昇降する。また、押え板9は、跳ね上げ用シリンダ10の駆動によるピストンロッド10aの伸長に伴ない、支持アーム12がその基端部を回動中心として図中時計方向に回動することにより上方に跳ね上げることができる。
【0009】かかるロードスタビライザは、図6に示すように押え板9を水平に保持した状態で昇降用シリンダ11のピストンロッド11aを収縮することにより押え板9を下降させ、この押え板9を、フォーク6を介して積載した荷物の上面に当接させることによりこの荷物を上方から押圧して搬送時の荷崩れ等の不都合を防止し得るようにしたものであり、搬送時にフォーク6から落下することにより損傷が大きいビン等、破損し易い荷物の搬送時に適用して特に有用なものである。
【0010】
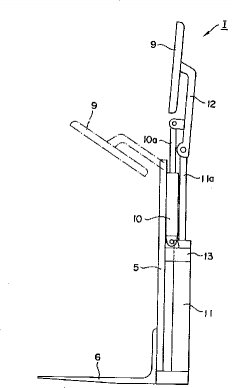
【発明が解決しようとする課題】上述の如きロードスタビライザの操作において、その跳ね上げ操作及び元の状態(押え板9が水平な状態)への復帰操作は、何れもフォークリフトのオペレータの判断により行なっている。すなわち、跳ね上げ操作時には昇降用シリンダ11のピストンロッド11aを伸長することにより、図7に示すように押え板9を跳ね上げてもこの押え板9とブラケット5とが干渉しない位置迄押え板9を上昇させ、その後跳ね上げ用シリンダ10のピストンロッド10aを伸長することにより押え板9を支持アーム12とともにこの支持アーム12の基端部を回動中心として図6,7中の時計方向に回動させている。
【0011】このため押え板9が充分な高さ迄上昇する前に跳ね上げ用シリンダ10を駆動すると押え板9がブラケット5に当接して損傷する場合がある。
【0012】一方、復帰操作時には昇降用シリンダ11のピストンロッド11aを収縮することにより押え板9を下降させるのであるが、この押え板9を跳ね上げたまま下降させるとこの下降に伴ない押え板9がブラケット5の上端面に衝突してしまうので、かかる事態が発生する前に押え板9を水平に保持する必要がある。
【0013】そこで、従来はオペレータが押え板9の位置と、ブラケット5の上端面の位置との関係を目視し乍ら跳ね上げ及び復帰の操作を行なっているが、誤操作により押え板9をブラケット5に衝突させてしまう虞があり、また操作に神経を使わなければならないこととも相俟ち、作業性の悪化も招来してしまう。
【0014】本発明は、上記従来技術に鑑み、押え板が所定位置で所定の姿勢になるように制御して押え板とブラケットとの干渉を未然に防止し得るロードスタビライザの制御装置を提供することを目的とする。
【0015】
【課題を解決するための手段】上記目的を達成する本発明の構成は、水平方向に伸びるフォーク及びこのフォークの基端部を固着するブラケットからなり車体の前方に配設したマストに沿い昇降する昇降部と一体的に昇降するよう構成するとともに、フォークに積載する荷物に上方から当接する水平な押え板、この押え板を前記昇降部に対して昇降する昇降手段及び押え板が垂直状態になるようにこの押え板を上方に跳ね上げる跳ね上げ手段を有するフォークリフトにおけるロードスタビライザの制御装置において、前記押え板が水平状態及び跳ね上げ状態の何れの状態であるのかを検出する第1の検出手段と、前記押え板を跳ね上げても良い所定位置以上の高さに押え板が達しているか否かを検出する第2の検出手段と、押え板が所定位置以上の高さに占位することを第2の検出手段に基づき検出しているとき、前記跳ね上げ手段による押え板の跳ね上げ動作を許容するとともに、所定の高さ以上に占位する押え板が水平状態となっていることを第1の検出手段に基づき検出しているとき、前記昇降手段による押え板の下降を許容するよう制御する制御手段とを有することを特徴とする。
【0016】
【作用】上記構成の本発明によれば、押え板の跳ね上げは、この押え板がブラケットと干渉することのない高さ以上に上昇した後に可能であり、また例えば押え板を跳ね上げた後等、所定の高さ以上の位置に占位する押え板の下降は押え板が水平状態を保持していることが確認されたことを条件として可能となる。
【0017】
【実施例】以下本発明の実施例を図面に基づき詳細に説明する。
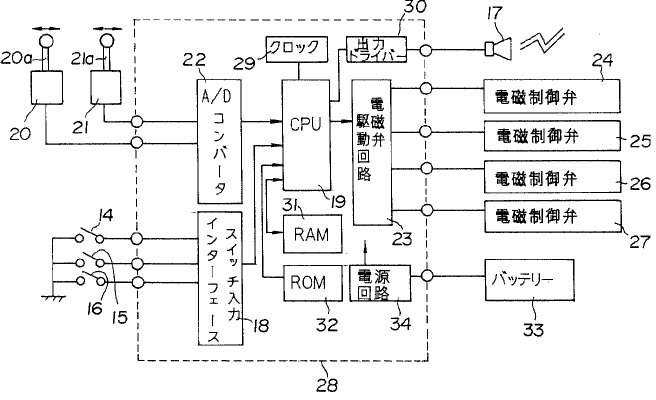
【0018】図1は本実施例に係る制御系を示すブロック線図、図2はその油圧回路を示す回路図である。両図に示すように、第1の検出手段である状態検出スイッチ14は支持アーム12の基端部の回動中心Oの近傍に配設したマイクロスイッチで構成してある。この状態検出スイッチ14は、押え板9の跳ね上げ及び復帰動作に伴ない支持アーム12が時計方向及び反時計方向に回動する際に支持アーム12の基端部がそれぞれ当接して動作させる。第2の検出手段である位置検出スイッチ15は昇降用シリンダ11のピストンロッド11aの近傍に配設したマイクロスイッチで構成してある。この位置検出スイッチ15はピストンロッド11aの伸縮の際にピストンロッド11aに形成された凸部11bが当接して動作される。ピストンロッド11bの伸長に伴ない位置検出スイッチ15が動作する位置は、この位置で押え板9を跳ね上げても、この押え板9がブラケット5と干渉することがないような高さに設定してある。チャイム選択スイッチ16は所定の条件(後に詳述する)の成立により鳴動するチャイム17を動作させるモードと、そうでないモードとの選択をするためのスイッチである。これら状態検出スイッチ14、位置検出スイッチ15及びチャイム選択スイッチ16の出力信号は、スイッチ入力インターフェース18を介してCPU19に入力するように構成してある。
【0019】ジョイステックレバー20,21はこれらの各レバー20a,21aを前後(図1では左右)に傾動することにより跳ね上げ用シリンダ10及び昇降用シリンダ11を駆動するもので、その操作量(傾動量)に応じたレベルのアナログ信号を送出するように構成してある。このアナログ信号はA/Dコンバータ22でディジタル信号に変換してCPU19に供給される。CPU19はA/Dコンバータ22の出力信号であるディジタル信号を処理するとともに、状態検出スイッチ14及び位置検出スイッチ15の出力信号を処理して所定の条件が成立している場合、電磁弁駆動回路23を介して各電磁制御弁24,25,26,27の何れか1個を動作させる。電磁制御弁24,25は押え板9の跳ね上げ及び復帰操作を行なうためのもの、電磁制御弁26,27は押え板の上昇及び下降を行なうためのものであり、それぞれ跳ね上げ用シリンダ10及び昇降用シリンダ11を駆動する。
【0020】コントローラ28は、前記CPU19を中心の構成要素とし、スイッチ入力インターフェース18、A/Dコンバータ22、電磁弁駆動回路23とともにクロック回路29、チャイム17の駆動回路である出力ドライバ30、RAM31、ROM32及び外部のバッテリー33を電源とする電源回路34等で構成してある。
【0021】上記コントローラ28において、ROM32には、ジョイステックレバー20,21の操作量に対応する制御電流が両者を対応ずけて記憶してある。また、電磁制御弁24〜27は前記制御電流値に応じて圧油の流量を調整するようになっている。かくして、通常はジョイステックレバー20,21の操作量に応じて跳ね上げ用シリンダ10及び昇降用シリンダ11に供給する油量を制御し得るが、CPU19の処理により、ジョイステックレバー20,21の操作量にかかわらず前記制御電流を強制的に零とした場合には、電磁制御弁24〜27は動作せず、したがって跳ね上げ用シリンダ10及び昇降用シリンダ11の駆動がロックされる。
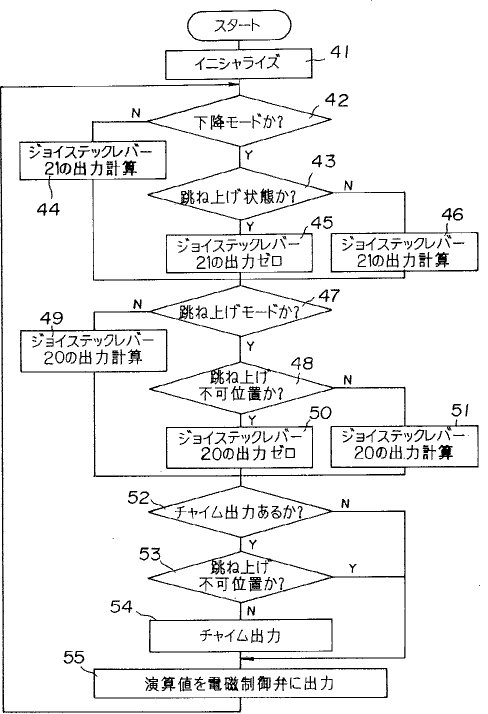
【0022】上述の如き本実施例の作用を図3のフローチャートに基づき詳述する。
【0023】■ イニシャライズ処理(処理ブロック41参照)の後、ジョイステックレバー21の出力信号に基づきロードスタビライザIが下降モード(昇降用シリンダ11により押え板9を下降させるモード)であるか否かを判定する(判定ブロック42参照)。
■ 判定ブロック42での判定の結果、下降モードであると判定された場合、状態検出スイッチ14からの情報に基づき押え板9が跳ね上げ状態であるか否かを判定する(判定ブロック43参照)。一方、下降モードではないと判定された場合、ジョイステックレバー21の操作量に応じた出力値を計算する(処理ブロック44参照)。
■ 判定ブロック43での判定の結果、跳ね上げ状態であると判定された場合、ジョイステックレバー21の出力を零とする(処理ブロック45)。一方、跳ね上げ状態ではないと判定された場合、ジョイステックレバー21の操作量に応じた出力値を計算する(処理ブロック46参照)。
■ ジョイステックレバー20の出力信号に基づき跳ね上げモード(跳ね上げ用シリンダ10により押え板9を跳ね上げるモード)であるか否かを判定する(判定ブロック47参照)。
■ 判定ブロック47での判定の結果、跳ね上げモードであると判定された場合、位置検出スイッチ15からの情報に基づき跳ね上げ不可位置、すなわち押え板9を跳ね上げた場合、この押え板9がブラケット5と干渉する位置であるか否かを判定する(判定ブロック48参照)。一方、跳ね上げモードではないと判定された場合、ジョイステックレバー20の操作量に応じた出力値を計算する(処理ブロック49参照)。
■ 判定ブロック48での判定の結果、跳ね上げ不可位置であると判定された場合、ジョイステックレバー20の出力を零とする(処理ブロック50)。一方、跳ね上げ不可位置ではないと判定された場合、ジョイステックレバー20の操作量に応じた出力値を計算する(処理ブロック51参照)。
■ チャイム選択スイッチ16からの情報に基づき、チャイム鳴動モードであるか否かを判定するとともに、ロードスタビライザIが上昇モードであるか否かを判定する(判定ブロック52参照)。
【0024】かくして本実施例によれば、押え板9が跳ね上がった状態でその下降操作をしても、この場合のジョイステックレバー21の操作に基づく出力値は零となるので、昇降用シリンダ11が動作することはない。また、跳ね上げ不可位置で押え板9の跳ね上げ操作をしても、この場合のジョイステックレバー20の操作に基づく出力値は零となるので、跳ね上げ用シリンダ10が動作することはない。
【0025】さらに、ロードスタビライザIの上昇モードにおいて、押え板9が跳ね上げ不可位置に在る場合にはチャイム17を鳴動させて跳ね上げ操作ができないことを警告することもできる。
【0026】
【発明の効果】以上実施例とともに具体的に説明したように、本発明によれば、ロードスタビライザの押え板とブラケットとが干渉するような状態では、干渉するような操作をしてもこの操作による昇降手段及び跳ね上げ手段の動作がロックされるので、オペレータは前記干渉を気にすることなく、押え板の跳ね上げ操作及びこの跳ね上げ状態からの下降操作を実施することができる。したがって、押え板とブラケットとの干渉による損傷を未然に防止し得るばかりでなく、良好な作業性も確保される。
【図面の簡単な説明】
【図1】本発明の実施例を示すブロック線図である。
【図2】前記実施例の油圧回路図である。
【図3】前記実施例の作用を示すフローチャートである。
【図4】標準形のフォークリフトの一例を示す斜視図である。
【図5】図4に示すフォークリフトの昇降部及びマスト部分を抽出して概念的に示す説明図である。
【図6】ロードスタビライザの一例を概念的に示す説明図である(通常時)。
【図7】ロードスタビライザの一例を概念的に示す説明図である(押え板の跳ね上げ時)。
【符号の説明】
4 車体
5 ブラケット
6 フォーク
9 押え板
10 跳ね上げ用シリンダ
11 昇降用シリンダ
14 状態検出用スイッチ
15 位置検出スイッチ
28 コントローラ
【0001】
【産業上の利用分野】本発明はフォークリフトにおけるロードスタビライザの制御装置に関し、特に押え板を跳ね上げる形式のロードスタビライザに適用して有用なものである。
【0002】
【従来の技術】フォークリフトは、積載した荷物を上下させるためのマストを車体の前方に備え、場所間の移動ができるようにした荷役用の産業車両である。
【0003】図4は標準形のフォークリフトの一例を示す斜視図である。同図に示すように、リフトシリンダ1は左右一対のアウターマスト2に固定され、ピストンロッド1aの伸縮に伴ないアウターマスト2をガイドとして左右一対のインナーマスト3を昇降するようになっている。このとき、アウターマスト2は車体4の前方でこの車体4に固定してある。この結果、インナーマスト3の昇降に伴ないチェーン(図4には図示を省略してある)に懸架してあるブラケット5及び直接荷物を積載するフォーク6からなる昇降部が昇降する。
【0004】さらに詳言すると、図5に概念的に示すように、フォーク6はその基端部がブラケット5に固着されて前方に突出しており、ブラケット5と一体的にチェーン7に懸架してある。このとき、チェーン7は、インナーマスト3に回動可能に支承したチェーンホイール8に懸架するとともに、一端をブラケット5に、他端をアウターマスト2にそれぞれ固定してある。
【0005】かくして、昇降部であるブラケット5及びフォーク6は、インナーマスト3の上昇に伴ない上昇するばかりでなく、固定部(アウターマスト2)に対しチェーンホイール8が上昇することによりインナーマスト3に対する相対位置が上昇する。すなわち、昇降部の地表面に対する上昇量は、インナーマスト3の上昇分にチェーン7の長さで規定される昇降部のインナーマスト3に対する相対上昇分を加えた量となる。
【0006】上述のフォークリフトは標準形のものであるが、このフォークリフトは、一般に、搬送する荷物の形状に合わせた各種のアタッチメントを取付け得るようになっている。この種のアタッチメントの一種としてロードスタビライザがある。
【0007】図6はロードスタビライザの一例を概念的に示す説明図である。同図に示すように、このロードスタビライザIは、押え板9、この押え板9の跳ね上げ用シリンダ10及び押え板9の昇降用シリンダ11を主な構成要素とするもので、ブラケット5及びフォーク6からなる昇降部と一体的にインナマスト(図示せず)に沿い昇降するように構成してある。すなわち、昇降用シリンダ11はブラケット5及びフォーク6と一体となっている。また、押え板9は、基端部を昇降用シリンダ11のピストンロッド11aの先端部に回動可能に固定した支持アーム12に支持してある。跳ね上げ用シリンダ10は、その基端部を支持部材13に、またそのピストンロッド10aの先端部を支持アーム12の中央部にそれぞれ回動可能に固定してある。
【0008】かくして、押え板9、跳ね上げ用シリンダ10、支持アーム12及び支持部材13は、昇降用シリンダ11の駆動によるピストンロッド11aの伸縮に伴ない一体的に昇降する。また、押え板9は、跳ね上げ用シリンダ10の駆動によるピストンロッド10aの伸長に伴ない、支持アーム12がその基端部を回動中心として図中時計方向に回動することにより上方に跳ね上げることができる。
【0009】かかるロードスタビライザは、図6に示すように押え板9を水平に保持した状態で昇降用シリンダ11のピストンロッド11aを収縮することにより押え板9を下降させ、この押え板9を、フォーク6を介して積載した荷物の上面に当接させることによりこの荷物を上方から押圧して搬送時の荷崩れ等の不都合を防止し得るようにしたものであり、搬送時にフォーク6から落下することにより損傷が大きいビン等、破損し易い荷物の搬送時に適用して特に有用なものである。
【0010】
【発明が解決しようとする課題】上述の如きロードスタビライザの操作において、その跳ね上げ操作及び元の状態(押え板9が水平な状態)への復帰操作は、何れもフォークリフトのオペレータの判断により行なっている。すなわち、跳ね上げ操作時には昇降用シリンダ11のピストンロッド11aを伸長することにより、図7に示すように押え板9を跳ね上げてもこの押え板9とブラケット5とが干渉しない位置迄押え板9を上昇させ、その後跳ね上げ用シリンダ10のピストンロッド10aを伸長することにより押え板9を支持アーム12とともにこの支持アーム12の基端部を回動中心として図6,7中の時計方向に回動させている。
【0011】このため押え板9が充分な高さ迄上昇する前に跳ね上げ用シリンダ10を駆動すると押え板9がブラケット5に当接して損傷する場合がある。
【0012】一方、復帰操作時には昇降用シリンダ11のピストンロッド11aを収縮することにより押え板9を下降させるのであるが、この押え板9を跳ね上げたまま下降させるとこの下降に伴ない押え板9がブラケット5の上端面に衝突してしまうので、かかる事態が発生する前に押え板9を水平に保持する必要がある。
【0013】そこで、従来はオペレータが押え板9の位置と、ブラケット5の上端面の位置との関係を目視し乍ら跳ね上げ及び復帰の操作を行なっているが、誤操作により押え板9をブラケット5に衝突させてしまう虞があり、また操作に神経を使わなければならないこととも相俟ち、作業性の悪化も招来してしまう。
【0014】本発明は、上記従来技術に鑑み、押え板が所定位置で所定の姿勢になるように制御して押え板とブラケットとの干渉を未然に防止し得るロードスタビライザの制御装置を提供することを目的とする。
【0015】
【課題を解決するための手段】上記目的を達成する本発明の構成は、水平方向に伸びるフォーク及びこのフォークの基端部を固着するブラケットからなり車体の前方に配設したマストに沿い昇降する昇降部と一体的に昇降するよう構成するとともに、フォークに積載する荷物に上方から当接する水平な押え板、この押え板を前記昇降部に対して昇降する昇降手段及び押え板が垂直状態になるようにこの押え板を上方に跳ね上げる跳ね上げ手段を有するフォークリフトにおけるロードスタビライザの制御装置において、前記押え板が水平状態及び跳ね上げ状態の何れの状態であるのかを検出する第1の検出手段と、前記押え板を跳ね上げても良い所定位置以上の高さに押え板が達しているか否かを検出する第2の検出手段と、押え板が所定位置以上の高さに占位することを第2の検出手段に基づき検出しているとき、前記跳ね上げ手段による押え板の跳ね上げ動作を許容するとともに、所定の高さ以上に占位する押え板が水平状態となっていることを第1の検出手段に基づき検出しているとき、前記昇降手段による押え板の下降を許容するよう制御する制御手段とを有することを特徴とする。
【0016】
【作用】上記構成の本発明によれば、押え板の跳ね上げは、この押え板がブラケットと干渉することのない高さ以上に上昇した後に可能であり、また例えば押え板を跳ね上げた後等、所定の高さ以上の位置に占位する押え板の下降は押え板が水平状態を保持していることが確認されたことを条件として可能となる。
【0017】
【実施例】以下本発明の実施例を図面に基づき詳細に説明する。
【0018】図1は本実施例に係る制御系を示すブロック線図、図2はその油圧回路を示す回路図である。両図に示すように、第1の検出手段である状態検出スイッチ14は支持アーム12の基端部の回動中心Oの近傍に配設したマイクロスイッチで構成してある。この状態検出スイッチ14は、押え板9の跳ね上げ及び復帰動作に伴ない支持アーム12が時計方向及び反時計方向に回動する際に支持アーム12の基端部がそれぞれ当接して動作させる。第2の検出手段である位置検出スイッチ15は昇降用シリンダ11のピストンロッド11aの近傍に配設したマイクロスイッチで構成してある。この位置検出スイッチ15はピストンロッド11aの伸縮の際にピストンロッド11aに形成された凸部11bが当接して動作される。ピストンロッド11bの伸長に伴ない位置検出スイッチ15が動作する位置は、この位置で押え板9を跳ね上げても、この押え板9がブラケット5と干渉することがないような高さに設定してある。チャイム選択スイッチ16は所定の条件(後に詳述する)の成立により鳴動するチャイム17を動作させるモードと、そうでないモードとの選択をするためのスイッチである。これら状態検出スイッチ14、位置検出スイッチ15及びチャイム選択スイッチ16の出力信号は、スイッチ入力インターフェース18を介してCPU19に入力するように構成してある。
【0019】ジョイステックレバー20,21はこれらの各レバー20a,21aを前後(図1では左右)に傾動することにより跳ね上げ用シリンダ10及び昇降用シリンダ11を駆動するもので、その操作量(傾動量)に応じたレベルのアナログ信号を送出するように構成してある。このアナログ信号はA/Dコンバータ22でディジタル信号に変換してCPU19に供給される。CPU19はA/Dコンバータ22の出力信号であるディジタル信号を処理するとともに、状態検出スイッチ14及び位置検出スイッチ15の出力信号を処理して所定の条件が成立している場合、電磁弁駆動回路23を介して各電磁制御弁24,25,26,27の何れか1個を動作させる。電磁制御弁24,25は押え板9の跳ね上げ及び復帰操作を行なうためのもの、電磁制御弁26,27は押え板の上昇及び下降を行なうためのものであり、それぞれ跳ね上げ用シリンダ10及び昇降用シリンダ11を駆動する。
【0020】コントローラ28は、前記CPU19を中心の構成要素とし、スイッチ入力インターフェース18、A/Dコンバータ22、電磁弁駆動回路23とともにクロック回路29、チャイム17の駆動回路である出力ドライバ30、RAM31、ROM32及び外部のバッテリー33を電源とする電源回路34等で構成してある。
【0021】上記コントローラ28において、ROM32には、ジョイステックレバー20,21の操作量に対応する制御電流が両者を対応ずけて記憶してある。また、電磁制御弁24〜27は前記制御電流値に応じて圧油の流量を調整するようになっている。かくして、通常はジョイステックレバー20,21の操作量に応じて跳ね上げ用シリンダ10及び昇降用シリンダ11に供給する油量を制御し得るが、CPU19の処理により、ジョイステックレバー20,21の操作量にかかわらず前記制御電流を強制的に零とした場合には、電磁制御弁24〜27は動作せず、したがって跳ね上げ用シリンダ10及び昇降用シリンダ11の駆動がロックされる。
【0022】上述の如き本実施例の作用を図3のフローチャートに基づき詳述する。
【0023】
【0024】かくして本実施例によれば、押え板9が跳ね上がった状態でその下降操作をしても、この場合のジョイステックレバー21の操作に基づく出力値は零となるので、昇降用シリンダ11が動作することはない。また、跳ね上げ不可位置で押え板9の跳ね上げ操作をしても、この場合のジョイステックレバー20の操作に基づく出力値は零となるので、跳ね上げ用シリンダ10が動作することはない。
【0025】さらに、ロードスタビライザIの上昇モードにおいて、押え板9が跳ね上げ不可位置に在る場合にはチャイム17を鳴動させて跳ね上げ操作ができないことを警告することもできる。
【0026】
【発明の効果】以上実施例とともに具体的に説明したように、本発明によれば、ロードスタビライザの押え板とブラケットとが干渉するような状態では、干渉するような操作をしてもこの操作による昇降手段及び跳ね上げ手段の動作がロックされるので、オペレータは前記干渉を気にすることなく、押え板の跳ね上げ操作及びこの跳ね上げ状態からの下降操作を実施することができる。したがって、押え板とブラケットとの干渉による損傷を未然に防止し得るばかりでなく、良好な作業性も確保される。
【図面の簡単な説明】
【図1】本発明の実施例を示すブロック線図である。
【図2】前記実施例の油圧回路図である。
【図3】前記実施例の作用を示すフローチャートである。
【図4】標準形のフォークリフトの一例を示す斜視図である。
【図5】図4に示すフォークリフトの昇降部及びマスト部分を抽出して概念的に示す説明図である。
【図6】ロードスタビライザの一例を概念的に示す説明図である(通常時)。
【図7】ロードスタビライザの一例を概念的に示す説明図である(押え板の跳ね上げ時)。
【符号の説明】
4 車体
5 ブラケット
6 フォーク
9 押え板
10 跳ね上げ用シリンダ
11 昇降用シリンダ
14 状態検出用スイッチ
15 位置検出スイッチ
28 コントローラ
【特許請求の範囲】
【請求項1】 水平方向に伸びるフォーク及びこのフォークの基端部を固着するブラケットからなり車体の前方に配設したマストに沿い昇降する昇降部と一体的に昇降するよう構成するとともに、フォークに積載する荷物に上方から当接する水平な押え板、この押え板を前記昇降部に対して昇降する昇降手段及び押え板が垂直状態になるようにこの押え板を上方に跳ね上げる跳ね上げ手段を有するフォークリフトにおけるロードスタビライザの制御装置において、前記押え板が水平状態及び跳ね上げ状態の何れの状態であるのかを検出する第1の検出手段と、前記押え板を跳ね上げても良い所定位置以上の高さに押え板が達しているか否かを検出する第2の検出手段と、押え板が所定位置以上の高さに占位することを第2の検出手段に基づき検出しているとき、前記跳ね上げ手段による押え板の跳ね上げ動作を許容するとともに、所定の高さ以上に占位する押え板が水平状態となっていることを第1の検出手段に基づき検出しているとき、前記昇降手段による押え板の下降を許容するよう制御する制御手段とを有することを特徴とするフォークリフトにおけるロードスタビライザの制御装置。
【請求項1】 水平方向に伸びるフォーク及びこのフォークの基端部を固着するブラケットからなり車体の前方に配設したマストに沿い昇降する昇降部と一体的に昇降するよう構成するとともに、フォークに積載する荷物に上方から当接する水平な押え板、この押え板を前記昇降部に対して昇降する昇降手段及び押え板が垂直状態になるようにこの押え板を上方に跳ね上げる跳ね上げ手段を有するフォークリフトにおけるロードスタビライザの制御装置において、前記押え板が水平状態及び跳ね上げ状態の何れの状態であるのかを検出する第1の検出手段と、前記押え板を跳ね上げても良い所定位置以上の高さに押え板が達しているか否かを検出する第2の検出手段と、押え板が所定位置以上の高さに占位することを第2の検出手段に基づき検出しているとき、前記跳ね上げ手段による押え板の跳ね上げ動作を許容するとともに、所定の高さ以上に占位する押え板が水平状態となっていることを第1の検出手段に基づき検出しているとき、前記昇降手段による押え板の下降を許容するよう制御する制御手段とを有することを特徴とするフォークリフトにおけるロードスタビライザの制御装置。
【図1】


【図2】
【図5】
【図3】
【図4】
【図6】
【図7】
【図2】
【図5】
【図3】
【図4】
【図6】
【図7】
【特許番号】第2862425号
【登録日】平成10年(1998)12月11日
【発行日】平成11年(1999)3月3日
【国際特許分類】
【出願番号】特願平4−22492
【出願日】平成4年(1992)2月7日
【公開番号】特開平5−213594
【公開日】平成5年(1993)8月24日
【審査請求日】平成9年(1997)6月17日
【出願人】(000006208)三菱重工業株式会社 (10,378)
【出願人】(000103035)エム・エイチ・アイさがみハイテック株式会社 (3)
【参考文献】
【文献】特開 昭50−114768(JP,A)
【文献】実開 平2−139898(JP,U)
【文献】実開 昭57−37998(JP,U)
【文献】実公 昭50−30776(JP,Y1)
【登録日】平成10年(1998)12月11日
【発行日】平成11年(1999)3月3日
【国際特許分類】
【出願日】平成4年(1992)2月7日
【公開番号】特開平5−213594
【公開日】平成5年(1993)8月24日
【審査請求日】平成9年(1997)6月17日
【出願人】(000006208)三菱重工業株式会社 (10,378)
【出願人】(000103035)エム・エイチ・アイさがみハイテック株式会社 (3)
【参考文献】
【文献】特開 昭50−114768(JP,A)
【文献】実開 平2−139898(JP,U)
【文献】実開 昭57−37998(JP,U)
【文献】実公 昭50−30776(JP,Y1)
[ Back to top ]