
モード解析方法およびモード解析システム
【課題】精度良好なモード解析を簡便かつ低コストで行う。
【解決手段】構造物1における複数の観測点6をデジタルビデオカメラ群により撮影する第1の工程と、前記撮影で得た各観測点6に関する映像から、各デジタルビデオカメラ間での同期がとられた所定時点を起点に所定時間毎の静止画像を抽出し、該静止画像中における所定画素に関して各静止画像間での変位方向を特定する第2の工程と、前記特定した各観測点6での変位方向に基づき、前記構造物1の各観測点6を連ねた領域に関する変形モードを特定する第3の工程と実行する。
【解決手段】構造物1における複数の観測点6をデジタルビデオカメラ群により撮影する第1の工程と、前記撮影で得た各観測点6に関する映像から、各デジタルビデオカメラ間での同期がとられた所定時点を起点に所定時間毎の静止画像を抽出し、該静止画像中における所定画素に関して各静止画像間での変位方向を特定する第2の工程と、前記特定した各観測点6での変位方向に基づき、前記構造物1の各観測点6を連ねた領域に関する変形モードを特定する第3の工程と実行する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、モード解析方法およびモード解析システムに関するものであり、具体的には、精度良好なモード解析を簡便かつ低コストで行う技術に関する。
【背景技術】
【0002】
各種構造物は様々な外力によって変形を生じることがある。構造物に劣化、損傷など生じている場合、そうした変形は大きくなる傾向にあり、構造物の健全性を把握するために変形の観測は重要となる。従来の手法としては、構造物の観測箇所に達する足場を組み、該当観測箇所に測定子を当接させたダイヤルゲージを設置し、このダイヤルゲージの表示値を観測する手法があるが、観測に際して設置する仮設構造物が大がかりとなり計測が容易でなかった。別の手法として、構造物に振動センサや加速度計を取付け、その計測値の積分処理等を行って変位量を観測するといった技術も提案されている。また他にも、予め観測箇所の画像を撮影しておき、この画像と以後撮影した画像とのずれを観測箇所の変位量として求める手法などもある。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】実公平1−36976号公報
【特許文献2】特開平5−339909号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ここで、ある方向に対して長さのある構造物の場合、外力に対するその構造物の挙動を解析して、構造物の状態を把握しようとすると、各点における変位量や振動数だけでなく、構造物全体の変形モードや振動モードを確認することが重要となる。想定される外力と構造物の強度特性等に基づくコンピュータシミュレーションを行って振動モードを推定する方法も存在するが、これはあくまでシミュレーションであり、実体の確認とはならない。
【0005】
従来、こうした振動モード等の特定にあたり、上述した、加速度センサにて測定される加速度値を積分し変位を求める手法等を用いていたが、その場合、センサなど測定装置を構造物に設置して計測を行う必要がある。しかしながら、そもそも測定装置の十分な設置場所を構造物にて確保できない場合や、機材、人員の配置用として構造物周囲に大がかりな仮設の足場を組む必要がある場合などもあり、計測自体が困難となったり、計測のための手間やコストが増大するといった問題があった。
【0006】
そこで本発明では、精度良好なモード解析を簡便かつ低コストで行う技術の提供を目的とする。
【課題を解決するための手段】
【0007】
上記課題を解決する本発明のモード解析方法は、構造物における複数の観測点をデジタルビデオカメラ群により撮影する第1の工程と、前記撮影で得た各観測点に関する映像から、各デジタルビデオカメラ間での同期がとられた所定時点を起点に所定時間毎の静止画像を抽出し、該静止画像中における所定画素に関して各静止画像間での変位方向を特定する第2の工程と、前記特定した各観測点での変位方向に基づき、前記構造物の各観測点を連ねた領域に関する変形モードを特定する第3の工程と、を含むことを特徴とする。
【0008】
本発明では、従来のように、センサなど測定装置を構造物の複数点に設置して計測を行う必要も無く、構造物周囲に足場等の仮設構造物を組む為の手間やコストなども抑制されることとなる。また、観測点での変位量の絶対値が測定しにくく変位方向のみ特定できるような状況であっても、構造物の変形モードを効率的かつ確実に特定することできる。よって本発明によれば、精度良好なモード解析を簡便かつ低コストで行うことが可能となる。
【0009】
なお、前記モード解析方法において、前記特定した変形モードを時系列順に連続させて振動モードを特定する第4の工程を含むとしてもよい。本発明によれば、振動の振幅方向と直交する方向に長さのある構造物において、振動モードを特定することが可能となり、構造物の状態や外力に対する挙動をより詳細に確認する情報を取得することができる。
【0010】
また、前記モード解析方法の前記第2の工程において、前記撮影で得た各観測点に関する映像から、各デジタルビデオカメラ間での同期がとられた所定時点を起点に所定時間毎の静止画像を抽出し、該静止画像中における所定画素に関して各静止画像間での変位を特定することで各観測点での所定時間毎の変位量を算定し、前記第3の工程において、前記算定した各観測点での所定時間毎の変位量に基づき、前記構造物の各観測点を連ねた領域に関する変形モードを特定する、としてもよい。本発明によれば、前記変形モードを変位量の絶対値に基づいて精度良く特定することが可能となる。
【0011】
また、前記モード解析方法の前記第4の工程において、前記所定時間毎の変位量に基づいて前記領域に関し特定した変形モードを、時系列順に連続させて振動モードを特定するとしてもよい。本発明によれば、上記同様に、前記振動モードを変位量の絶対値に基づいて精度良く特定することが可能となる。
【0012】
また、前記モード解析方法の前記第1の工程において、前記デジタルビデオカメラ群の撮影範囲に向け、発光装置による発光を行い、前記第2の工程において、前記映像を構成するフレームのうち前記発光装置による発光開始時点の発光が写り込んでいるフレームを、各デジタルビデオカメラ間での同期がとられた所定時点と特定し、このフレームを起点に一定時間毎の静止画像を抽出するとしてもよい。
【0013】
従来では、測定装置間の同期をとるために、例えば電気信号を測定装置に一斉通知するなどの手法がとられていたが、マイクロ秒単位での同期が必要なことから、各測定装置に固有の動作時間の差異、ネットワーク遅延等の問題があって、精度良く同期を図ることはかなり困難であった。しかしながら、上記のような本発明によれば、各デジタルビデオカメラに固有の差異等に関係なく、デジタルビデオカメラ間で同時刻に撮影されたフレームを起点として特定することができる。なお、各デジタルビデオカメラのうち、発光装置からの発光を直接撮影できない位置にあるものについては、発光装置と該デジタルビデオカメラとの間に、前記発光を導く鏡等の反射材を適宜設置し、反射光をデジタルビデオカメラの撮影領域に導くとしてもよい。
【0014】
また、前記モード解析方法の前記第1の工程において、前記デジタルビデオカメラ群の撮影範囲に向けた、前記発光装置による発光を、所定時間のみの短時間発光とし、前記第2の工程において、前記映像を構成するフレームのうち前記発光装置による短時間発光が写り込んでいるフレームを、各デジタルビデオカメラ間での同期がとられた所定時点と特定し、このフレームを起点に一定時間毎の静止画像を抽出するとしてもよい。このように、発光装置による発光を短時間の発光、例えばフラッシュの発光のごときものとすれば、発光が写り込むフレーム数が限定的となって、その他のフレームとの区別が明確になり、ひいては各デジタルビデオカメラ間での同期がとられた所定時点を確実に特定することが可能になる。
【0015】
また、本発明のモード解析システムは、構造物における複数の観測点をデジタルビデオカメラ群と、情報処理装置とを含み、前記情報処理装置は、前記デジタルビデオカメラ群が撮影で得た各観測点に関する映像から、各デジタルビデオカメラ間での同期がとられた所定時点を起点に所定時間毎の静止画像を抽出し、該静止画像中における所定画素に関して各静止画像間での変位方向を特定する処理と、前記特定した各観測点での変位方向に基づき、前記構造物の各観測点を連ねた領域に関する変形モードを特定する処理とを実行するものである、ことを特徴とする。
【発明の効果】
【0016】
本発明によれば、精度良好なモード解析を簡便かつ低コストで行うことが可能となる。
【図面の簡単な説明】
【0017】
【図1】本実施形態におけるモード解析システムの説明図である。
【図2】本実施形態におけるモード解析システムを構成する各装置類のハードウェア構成例を示す図である。
【図3】本実施形態のモード解析方法の処理手順例を示す説明図である。
【図4】本実施形態の二値化画像例を示す説明図である。
【図5】本実施形態の変位例を示す説明図である。
【図6】本実施形態の処理結果例1を示す説明図である。
【図7】本実施形態の処理結果例2を示す説明図である。
【図8】本実施形態の処理結果例3を示す説明図である。
【発明を実施するための形態】
【0018】
−−−システム等の構成例−−−
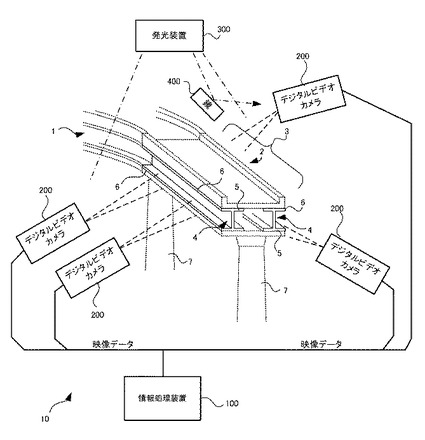
以下に本発明の実施形態について図面を用いて詳細に説明する。図1は、本実施形態におけるモード解析システム10の説明図である。本実施形態のモード解析システム10は、精度良好なモード解析を簡便かつ低コストで行うものであり、図1に示すように、情報処理装置100および複数のデジタルビデオカメラ200で構成されている。
【0019】
ここでは、解析対象の構造物として橋梁1の橋桁2を例示する。橋梁1を車両や鉄道など所定の重量を持った移動体が通行すれば、移動体の自重や移動速度の大きさ等に応じて橋桁2が鉛直方向に振動したり沈み込んだりすることとなる。橋梁1の健全性を診断したり、振動モードを把握する場合、こうした橋桁2の変位を観測し変位量を得ておくことは重要である。但し、変位量の絶対値が測定できず、変位方向しか観測できないような場合であっても、本実施形態のモード解析方法によれば変形モードや振動モードが判明し、解析対象の構造物について変位の傾向は明らかとなるから、技術的に十分な意義がある。
【0020】
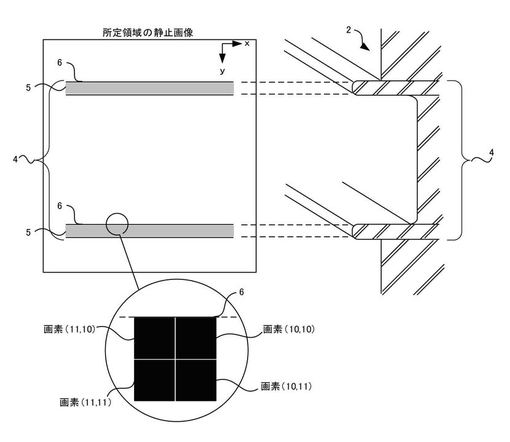
ところで、前記橋梁1を構成する部材のうち橋桁2については、例えばH型鋼4が構成に含まれることが多い。H型鋼4は仕様が規格化された部材であり、予め各箇所の寸法は判明している。H型鋼4は橋脚7の間に渡されて、その側面であるフランジ5の端部6を橋桁2の側面3に露出している。このフランジ端部6の厚みは仕様に応じて決まっており、つまり、鉛直方向の寸法が判明していると言える。
【0021】
本実施形態では、こうしたH型鋼4における、例えば橋桁延長方向に一定距離毎に離間した複数のフランジ端部6(すなわち複数の観測点)のそれぞれに対し、デジタルビデオカメラ200を配置して映像を撮影して変位量を算定し、ひいてはモード解析を行うこととする。勿論、橋桁2を構成するH型鋼以外の部材の所定箇所を観測点としてもよい。
【0022】
従って、デジタルビデオカメラ200は、例えば、前記観測点の数だけ、橋梁1の周囲に配置される。勿論、全観測点のうち複数の観測点(フランジ端部6)を一度に撮影範囲に収めるデジタルビデオカメラ200を配置し、観測点の総数以下のデジタルビデオカメラ200でデジタルビデオカメラ群を構成するとしてもよい。
【0023】
なお、前記モード解析システム10において、前記デジタルビデオカメラ群の撮影範囲に向け発光を行う発光装置300が含まれるとすれば好適である。この発光装置300としては、例えばカメラ撮影時に使用されるフラッシュを採用できる。発光装置300による発光は、デジタルビデオカメラ200が撮影した映像中に写り込むことになる。映像中に写り込んだ発光は、後述する情報処理装置100での処理に際し、各デジタルビデオカメラ間での同期がとられた所定時点の目印となるものである。すなわち、情報処理装置100は、映像を構成するフレームのうち前記発光が写り込んでいるフレームを、各デジタルビデオカメラ間での同期がとられた所定時点と特定するのである。従って、複数フレームを跨って発光が撮影されないよう、フレームレートが示す1フレームの撮影時間以下で前記発光がなされるよう、発光装置300での発光時間はごく短時間に調整してある。
【0024】
なお、発光装置300による発光時間は、上述のフラッシュの如くごく短時間であればフレーム特定が容易となり好適であるが、発光時間がフラッシュほど短時間でなくとも本実施形態の実行は可能である。発光の写り込みが始まったフレームを、各デジタルビデオカメラ間での同期がとられたフレームとして特定できるからである。
【0025】
図に示すように、前記発光装置300の発光がデジタルビデオカメラ200の撮影範囲に入らないおそれがある場合、発光装置300で発光された光が障害物等を回避してデジタルビデオカメラ200に到達できるよう、適宜な位置に反射材として鏡400を配置するとしてもよい。このような形態を採用すれば、構造物周囲がデジタルビデオカメラ200を配置するのも困難なほど狭小であったり、交通量や障害物が多かったりといった困難な状況であっても、これに柔軟に対応して発光装置300からの発光をデジタルビデオカメラ200に導くことができる。ひいては、より確実に上述の所定契機の特定が可能になる。
【0026】
従来では、測定装置間の同期をとるために、例えば電気信号を測定装置に一斉通知するなどの手法がとられていたが、マイクロ秒単位での同期が必要である一方、各測定装置に固有の動作時間の差異、ネットワーク遅延等の問題があって、精度良く同期を図ることはかなり困難であった。しかしながら、上記のように発光装置300の発光を利用することで、各デジタルビデオカメラに固有の差異等に関係なく、デジタルビデオカメラ間で同時刻に撮影されたフレームを起点として特定することができる。
【0027】
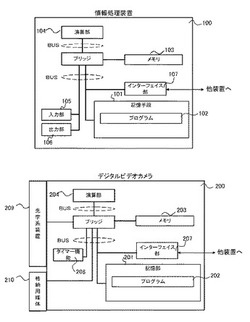
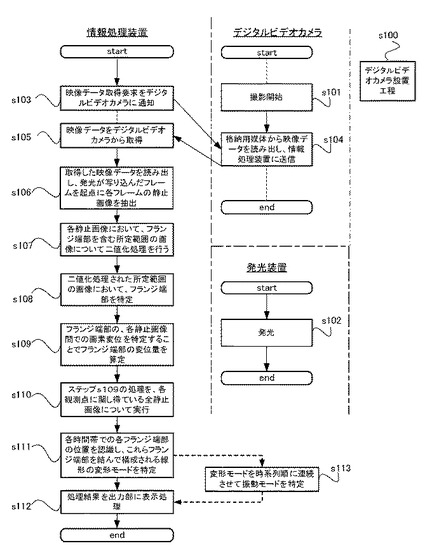
続いて、本実施形態のモード解析システム10を構成する各装置について、そのハードウェア構成を詳述する。図2は、本実施形態におけるモード解析システム10を構成する各装置らのハードウェア構成例を示す図である。本実施形態のモード解析システム10を構成する情報処理装置100は、コンピュータとして備えるべき、ハードディスクドライブなど不揮発性記憶装置たる記憶部101、RAMなど揮発性記憶装置たるメモリ103、記憶部101のプログラム102をメモリ103に読み出して実行するCPUたる演算部104、ユーザからの指示を受け付けるキーボードやマウス等の入力部105、処理結果を出力するディスプレイ装置やスピーカーといった出力部106、他装置とデータ授受を行うためのインターフェイス部107を備えている。
【0028】
また、モード解析システム10を前記情報処理装置100と共に構成するデジタルビデオカメラ200は、所定レベルのフレームレートで動画撮影が可能なビデオカメラであり、ビデオカメラとして備えるべき一般的構成は勿論具備している。このデジタルビデオカメラ200は、撮影用の光学系装置209や映像データの格納用媒体210(各種記録媒体とそのリーダライタ、ハードディスクドライブ等)の他に、映像データのデジタル処理など各種情報処理を実行するためのコンピュータチップが備わっている。このコンピュータチップは、不揮発性記憶装置たる記憶部201、揮発性記憶装置たるメモリ203、記憶部201からプログラム202をメモリ203に読み出して実行するCPUたる演算部204、および他装置とデータ授受を行うためのインターフェイス部207を含んでいる。
【0029】
続いて、モード解析システム10を構成する情報処理装置100の演算部104が、プログラム102の実行により実現する処理について説明する。情報処理装置100は、複数のフランジ端部6を含む所定領域に対する撮影で各デジタルビデオカメラ200が得た各フランジ端部6に関する映像データを、例えば、各デジタルビデオカメラ200のインターフェイス部207から取得し、該映像データから、各デジタルビデオカメラ間での同期がとられた所定時点を起点に所定時間毎の静止画像を抽出し、該静止画像中における所定画素に関して、各静止画像間での変位方向を特定する処理、ないしは、各静止画像間での変位を特定することで各観測点での所定時間毎の変位量を算定する処理を実行する。変位量の絶対値が得られる場合は、各観測点での所定時間毎の変位量を算定する処理を実行するとすれば、変形モードひいては振動モードの特定が精度良く行えるため好適である。
【0030】
なお、前記情報処理装置100は、前記抽出した各静止画像において前記フランジ端部6を含む所定範囲の画像について二値化処理を行う処理を実行することとなる。画像の二値化処理は、例えば、画素の濃淡情報が一定閾値より小さければ白色、一定閾値より大きければ黒色といった具合に、各画素を黒白二色に振り分ける処理となる。こうした二値化処理の手法自体は従来手法を採用すればよい。また、こうした二値化処理を実行するためのプログラムが前記プログラム102には含まれている。
【0031】
なお、デジタルビデオカメラ200は、情報処理装置100からの映像データの取得要求をインターフェイス部207にて受け付け、この要求に応じて格納用媒体210から映像データを読み出し、これをインターフェイス部207を介して情報処理装置100に送信する。或いは、情報処理装置100のインターフェイス部107に接続された所定の読み取り装置に対し、ユーザが各デジタルビデオカメラ200の格納用媒体210をセットし、前記読み取り装置が格納用媒体210から読み取った映像データを情報処理装置100に送るとしてもよい。
【0032】
また、前記情報処理装置100は、二値化処理された前記所定範囲の画像において前記フランジ端部6を特定し、該特定したフランジ端部6の各静止画像間での画素数単位の変位と前記判明している寸法とに基づいて前記フランジ端部6の変位量を算定する処理を実行する。前記フランジ端部6とは異なり、解析対象の実寸法が予め判明しておらず、変位量の算定処理が出来ない場合、前記情報処理装置100は、例えば静止画像中における所定の基準位置からの画素の変位方向を判定する処理を行う。前記基準位置の例としては、静止画像中の解析対象における重心を含んで鉛直ないし水平に延びる直線状の軸線の位置、を想定できる。情報処理装置100は該当画素がその基準位置より上下左右のいずれの位置にあるか判定し、基準位置から見て該当位置の方向に画素が変位したと特定できる。
【0033】
二値化処理された前記所定範囲の画像においてフランジ端部6を特定する処理は、情報処理装置100が、例えば入力部105にてユーザから該当画像の指定を受けて特定する場合があげられる。或いは、情報処理装置100が、フランジ端部6の形状パターンのデータ(例:フランジ端部6を描画する際の各線分の長さと描画角度等のデータ)を記憶部101に保持していて、その形状パターンに合致する黒色画素の集合体をフランジ端部6と認識するといった画像認識処理を行う場合もあげられる。
【0034】
また、特定したフランジ端部6の各静止画像間での画素数単位の変位は、例えば、各静止画像の座標平面上における、前記フランジ端部6に対応した画素の座標値を、所定時間間隔の静止画像間で比較し、各静止画像の前記座標値の間の距離を算定することで得られる。当然、画素の変位量がそのまま実際のフランジ端部6の変位量とならないから、その場合、既知の寸法値に対する画素数から単位画素あたりの変位量を示す係数値を情報処理装置100が記憶部101等に予め保持しておき、各静止画像の前記座標値の間の距離すなわち画素の変位量に前記係数値を乗算し、フランジ端部6の変位量を算定するとすればよい。
【0035】
また、前記情報処理装置100は、前記特定した各フランジ端部6での変位方向に基づき、前記橋梁1の各フランジ端部6を連ねた領域に関する変形モードを特定するか、或いは、前記算定した各フランジ端部6での所定時間毎の変位量に基づき、前記橋梁1の各フランジ端部6を連ねた領域に関する変形モードを特定する。また、前記情報処理装置100は、前記特定した変形モードを時系列順に連続させて振動モードを特定するか、或いは前記所定時間毎の変位量に基づいて前記領域に関し特定した変形モードを、時系列順に連続させて振動モードを特定する。こうした変形モード、振動モードを特定する処理の詳細については後述する。
【0036】
ここで、CPU等の演算部によりプログラムを実行することで、必要な機能を実装する例をあげたが、必要な機能を実現する電子回路等を前記情報処理装置100やデジタルビデオカメラ200が備えていて、同様の処理を実行するとしても勿論問題ない。
【0037】
−−−モード解析方法の手順例−−−
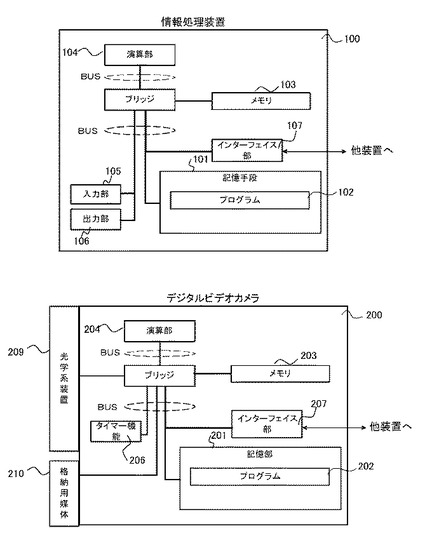
次に、本実施形態におけるモード解析方法の処理手順について説明する。図3は、本実施形態におけるモード解析方法の処理手順例を示す説明図である。まず、解析対象となる橋桁2の各所に存在するフランジ端部6のそれぞれに対し、レンズを向けてデジタルビデオカメラ200を設置する(s100)。フランジ端部6とデジタルビデオカメラ200との間の距離は、デジタルビデオカメラ200の望遠撮影機能において所定解像度で前記フランジ端部6を撮影できる距離となる。また、当然ではあるが、橋桁2におけるH型鋼4のフランジ端部6が撮影範囲に収まるよう、デジタルビデオカメラ200の設置高さ、上下左右のレンズ角度は調整される。
【0038】
上述のように設置がなされたデジタルビデオカメラ200のインターフェイス部207と、情報処理装置100のインターフェイス部107とは所定の通信ケーブル、ないし無線通信手段でデータ授受可能に接続しておくと好適である。
【0039】
各デジタルビデオカメラ200は、観測担当者からの指示を例えばリモコンからの赤外線通信等を介して受信し、自身が撮影を担当するフランジ端部6に対する撮影を開始する(s101)。或いは、デジタルビデオカメラ200が、自身で備えるタイマー機能206等で予めセットされた一定時刻の到来を検知して、自律的に撮影を開始するとしてもよい。また、前記発光装置300が、上記観測担当者からの指示を前記デジタルビデオカメラ200と同様に受けて、指示受信から一定時間後に所定時間だけ発光動作を行う(s102)。一定時間後に発光動作を行うのは、デジタルビデオカメラ群を構成する各デジタルビデオカメラ200が確実に該発光を撮影できるよう、全てのデジタルビデオカメラ200において撮影が開始済みとなったタイミングを見計らう意図がある。
【0040】
各デジタルビデオカメラ200は、撮影の進行と共に、得られた映像データを格納用媒体210に格納している。当然、この映像データを構成するいずれかのフレームには、前記発光装置300による発光が写り込んでいる。各デジタルビデオカメラ200はインターフェイス部207を介して接続された情報処理装置100に対し、映像データを一定時間毎またはリアルタイムにアップロードするとしてもよい。
【0041】
一方、情報処理装置100は、映像データ取得要求を各デジタルビデオカメラ200に通知する(s103)。他方、各デジタルビデオカメラ200は、情報処理装置100からの映像データ取得要求をインターフェイス部207にて受け付け、この要求に応じて格納用媒体210から映像データを読み出し、これをインターフェイス部207を介して情報処理装置100に送信する(s104)。或いは、情報処理装置100のインターフェイス部107に接続された所定の読み取り装置に対し、ユーザが各デジタルビデオカメラ200の格納用媒体210をセットし、前記読み取り装置が格納用媒体210から読み取った映像データを情報処理装置100に送るとしてもよい。
【0042】
こうして情報処理装置100は、前記フランジ端部6を含む所定領域に関する映像データを、前記デジタルビデオカメラ200から取得し(s105)、記憶部101に格納する。また情報処理装置100は、前記ステップで取得した映像データを一定期間毎に記憶部101から読み出し、各デジタルビデオカメラ間での同期がとられた所定時点、すなわち前記発光装置300による発光開始時点の発光が写り込んでいるフレームを起点に、1/30秒といった所定時間毎すなわち各フレームの静止画像を抽出する(s106)。動画からの静止画像の抽出処理については既存の技術を適用すればよい。
【0043】
次に情報処理装置100は、前記ステップで抽出した各静止画像において、前記H型鋼4のフランジ端部6を含む所定範囲の画像について二値化処理を行う(s107)。画像の二値化処理は、例えば、画素の濃淡情報(コントラスト情報)が示す値と一定閾値とを比較し、濃淡値が閾値より小さければ白色、逆に濃淡値が閾値より大きければ黒色といった具合に、各画素を黒白二色に振り分ける処理となる。こうした二値化処理の手法自体は従来手法を採用すればよい。また、こうした二値化処理を実行するためのプログラムが前記プログラム102には含まれている。
【0044】
続いて情報処理装置100は、前記ステップで二値化処理された前記所定範囲の画像において、前記フランジ端部6を特定する(s108)。二値化処理された前記所定範囲の画像(図4参照)においてフランジ端部6を特定する処理は、情報処理装置100が、例えば入力部105にてユーザから該当画像の指定(範囲指定や要素指定など)を受けて特定する場合があげられる。或いは、情報処理装置100が、フランジ端部6の形状パターンのデータ(例:フランジ端部6を描画する際の各線分の長さ、線分間の距離、描画角度等のデータ)を記憶部101に保持していて、その形状パターンに合致する黒色画素の集合体をフランジ端部6と認識するといった画像認識処理を行う場合もあげられる。
【0045】
情報処理装置100は、前記ステップで特定したフランジ端部6の、各静止画像間での画素数単位の変位と前記判明している寸法とに基づいて前記フランジ端部6の変位量を算定する(s109)。フランジ端部6の各静止画像間での画素数単位の変位は、例えば、各静止画像の座標平面上における、前記フランジ端部6に対応した画素の座標値を、一定時間間隔の静止画像間で比較し、各静止画像の前記座標値の間の距離を算定することで得られる。当然、画素の変位量がそのまま実際のフランジ端部6の変位量とならないから、その場合、既知の寸法値に対する画素数から単位画素あたりの変位量を示す係数値を情報処理装置100が記憶部101等に予め保持しておき、各静止画像の前記座標値の間の距離すなわち画素の変位量に前記係数値を乗算し、フランジ端部6の変位量を算定するとすればよい。
【0046】
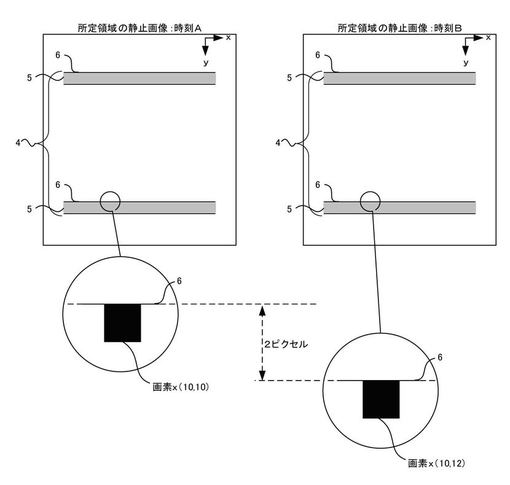
例えば、図5の例で示すように、時刻Aの静止画像におけるフランジ端部6の所定画素xの座標値(10,10)、時刻Aから1/30秒後の時刻Bの静止画像における前記所定画素xの座標値(10,12)、とする。この場合、画素xは1/30秒の間に、“12−10”=2ピクセルだけ鉛直方向に移動したことがわかる。前記フランジ端部6の鉛直方向の寸法、すなわちフランジ端部6の実際の厚みが例えば20mmであり、静止画像中での該当箇所を示す画素の数が100ピクセルであった場合、画素1ピクセルあたりのフランジ端部6の実際の寸法値は0.2(mm)となる。これは鉛直方向における単位画素変位あたりの実際の変位量に相当する値であり、情報処理装置100はこの値を係数値として記憶部101に予め保持している。この場合、情報処理装置100は、前記画素xの変位量たる2ピクセルに対し、前記係数値である0.2を乗算し、前記時刻A−B間でのフランジ端部6の変位量を“2×0.2”=0.4(mm)と算定する。上述のように、画像中での画素変位とフランジ端部6での実際の変位は両者とも鉛直方向で一致し、前記単位画素変位あたりのフランジ端部6の実際の変位量も特定されているから、フランジ端部6に正対せず例えば斜め横方向からの撮影がなされた場合であっても、得られた画像に基づいた誤差の無い変位量算定が行えることになる。
【0047】
勿論、上述のように各フレーム毎にフランジ端部6の変位量を算定するのではなく、沈み込みなど比較的長いタイムスパンでの変位に着目して、例えば0.5秒間隔での変位量算定を行うといった処理形態を採用してもよい。
【0048】
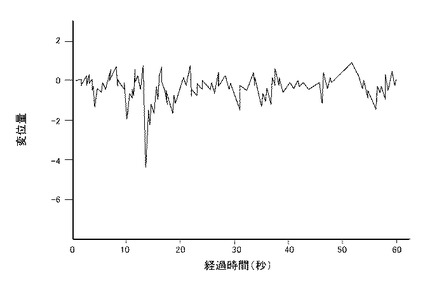
情報処理装置100は、上述したステップs109の処理を、例えば、各観測点すなわち各フランジ端部6に関する前記映像データから得ている全ての静止画像について実行する(s110)。ここでの処理結果は、図6に示すグラフのように、経過時間毎の各フランジ端部6の変位量を示す折れ線グラフといったものがあげられる。
【0049】
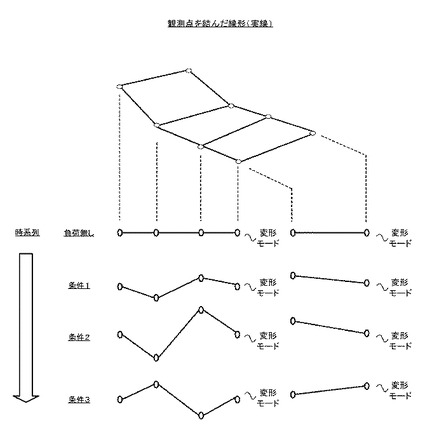
情報処理装置100は、こうして求めた、各時間帯での各フランジ端部6における変位量に基づいて、各時間帯での各フランジ端部6の位置を認識し、これらフランジ端部6を結んで構成される線形の時間帯毎の形状、すなわち変形モードを特定する(s111:図7参照)。図7に示すように、橋軸方向だけでなく橋幅方向についても変位の分布はあり、いずれの方向についてもモード解析が可能である。また、情報処理装置100は、前記変形モードを時系列順に連続させて、橋桁2の振動モードを特定する(s113)としてもよい。図7の例では、車両等が通過していない負荷無しの状態から、条件に応じて変形モードが推移していく振動モードを例示している。橋桁2において、通行車両の重量や通過間隔、重量やサイズが異なる複数車両の連続通行事象など、様々な条件によって振動モードは変化する。また、橋桁2の延長形状は、直線またはカーブ、上り坂または下り坂、それらの組み合わせ、といった具合に場所により種々変化するが、こうした条件によっても振動モードは変化する。本実施形態のモード解析システム10であれば、デジタルビデオカメラ200による撮影と情報処理装置100による情報処理でモード解析を簡便かつ確実に行えるから、上述したように条件が複雑に変化する構造物であっても問題なく適用し高精度のモード解析を実現できる。
【0050】
情報処理装置100は、前記ステップで特定した変形モードや振動モードの情報を出力部106に表示処理し(s112)、フローを終了することになる。
【0051】
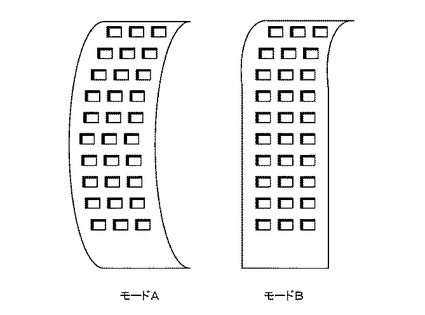
なお、モード解析対象となる前記構造物としては、前記橋梁1の他に、例えば、各種ビル、管路、架線なども想定できる。例えばビルに生じる変形についてそのモード解析を行った場合、図8に例示するように、ビル全体が中位階を中心にはらみだす形態となる振動モード(図中のモードA)、或いは、ビル上位階が側方に振られる振動モード(図中のモードB)などといったモード解析結果を得られる。ビルでは変位挙動がビル全体にわたることもあるなど変位観測が行いにくく、上記橋桁2のように変位量の絶対値を測定することが容易でない場合があるが、本実施形態のモード解析方法を採用すれば、例えば所定の観測点における所定時間の変位方向(例えば、ビルを上下に貫く所定軸を基準にした変位方向)を特定し、ここで特定した各観測点の変位方向を結んで変形モードの情報を得ることができる。
【0052】
この場合、前記情報処理装置100は前記ビルが撮影された各静止画像中の所定画素が前記基準位置より左右のいずれの位置にあるか判定し、基準位置から見て該当位置の方向に画素すなわちビルの所定箇所が変位したと特定できる。従って、静止画像中の所定画素がある時間帯にどの方向に移動したか判明することになる。こうして変位方向が判明した各所について、前記基準位置からの移動方向に変位があったとして線分を結べば、図7に例示したものと同様の変形モードの情報が得られる。また、この変形モードを時系列順に連続させれば振動モードの特定も可能である。
【0053】
以上のような本実施形態によれば、精度良好なモード解析を簡便かつ低コストで行うことが可能となる。
【0054】
本発明の実施の形態について、その実施の形態に基づき具体的に説明したが、これに限定されるものではなく、その要旨を逸脱しない範囲で種々変更可能である。
【符号の説明】
【0055】
1 橋梁(構造物)
2 橋桁
3 橋桁の側面
4 H型鋼
5 フランジ
6 フランジ端部(観測点)
7 橋脚
10 モード解析システム
100 情報処理装置
101 記憶部
102 プログラム
103 メモリ
104 演算部
105 入力部
106 出力部
107 インターフェイス部
200 デジタルビデオカメラ
201 記憶部
202 プログラム
203 メモリ
204 演算部
206 タイマー機能
207 インターフェイス部
300 発光装置
400 鏡
【技術分野】
【0001】
本発明は、モード解析方法およびモード解析システムに関するものであり、具体的には、精度良好なモード解析を簡便かつ低コストで行う技術に関する。
【背景技術】
【0002】
各種構造物は様々な外力によって変形を生じることがある。構造物に劣化、損傷など生じている場合、そうした変形は大きくなる傾向にあり、構造物の健全性を把握するために変形の観測は重要となる。従来の手法としては、構造物の観測箇所に達する足場を組み、該当観測箇所に測定子を当接させたダイヤルゲージを設置し、このダイヤルゲージの表示値を観測する手法があるが、観測に際して設置する仮設構造物が大がかりとなり計測が容易でなかった。別の手法として、構造物に振動センサや加速度計を取付け、その計測値の積分処理等を行って変位量を観測するといった技術も提案されている。また他にも、予め観測箇所の画像を撮影しておき、この画像と以後撮影した画像とのずれを観測箇所の変位量として求める手法などもある。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】実公平1−36976号公報
【特許文献2】特開平5−339909号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ここで、ある方向に対して長さのある構造物の場合、外力に対するその構造物の挙動を解析して、構造物の状態を把握しようとすると、各点における変位量や振動数だけでなく、構造物全体の変形モードや振動モードを確認することが重要となる。想定される外力と構造物の強度特性等に基づくコンピュータシミュレーションを行って振動モードを推定する方法も存在するが、これはあくまでシミュレーションであり、実体の確認とはならない。
【0005】
従来、こうした振動モード等の特定にあたり、上述した、加速度センサにて測定される加速度値を積分し変位を求める手法等を用いていたが、その場合、センサなど測定装置を構造物に設置して計測を行う必要がある。しかしながら、そもそも測定装置の十分な設置場所を構造物にて確保できない場合や、機材、人員の配置用として構造物周囲に大がかりな仮設の足場を組む必要がある場合などもあり、計測自体が困難となったり、計測のための手間やコストが増大するといった問題があった。
【0006】
そこで本発明では、精度良好なモード解析を簡便かつ低コストで行う技術の提供を目的とする。
【課題を解決するための手段】
【0007】
上記課題を解決する本発明のモード解析方法は、構造物における複数の観測点をデジタルビデオカメラ群により撮影する第1の工程と、前記撮影で得た各観測点に関する映像から、各デジタルビデオカメラ間での同期がとられた所定時点を起点に所定時間毎の静止画像を抽出し、該静止画像中における所定画素に関して各静止画像間での変位方向を特定する第2の工程と、前記特定した各観測点での変位方向に基づき、前記構造物の各観測点を連ねた領域に関する変形モードを特定する第3の工程と、を含むことを特徴とする。
【0008】
本発明では、従来のように、センサなど測定装置を構造物の複数点に設置して計測を行う必要も無く、構造物周囲に足場等の仮設構造物を組む為の手間やコストなども抑制されることとなる。また、観測点での変位量の絶対値が測定しにくく変位方向のみ特定できるような状況であっても、構造物の変形モードを効率的かつ確実に特定することできる。よって本発明によれば、精度良好なモード解析を簡便かつ低コストで行うことが可能となる。
【0009】
なお、前記モード解析方法において、前記特定した変形モードを時系列順に連続させて振動モードを特定する第4の工程を含むとしてもよい。本発明によれば、振動の振幅方向と直交する方向に長さのある構造物において、振動モードを特定することが可能となり、構造物の状態や外力に対する挙動をより詳細に確認する情報を取得することができる。
【0010】
また、前記モード解析方法の前記第2の工程において、前記撮影で得た各観測点に関する映像から、各デジタルビデオカメラ間での同期がとられた所定時点を起点に所定時間毎の静止画像を抽出し、該静止画像中における所定画素に関して各静止画像間での変位を特定することで各観測点での所定時間毎の変位量を算定し、前記第3の工程において、前記算定した各観測点での所定時間毎の変位量に基づき、前記構造物の各観測点を連ねた領域に関する変形モードを特定する、としてもよい。本発明によれば、前記変形モードを変位量の絶対値に基づいて精度良く特定することが可能となる。
【0011】
また、前記モード解析方法の前記第4の工程において、前記所定時間毎の変位量に基づいて前記領域に関し特定した変形モードを、時系列順に連続させて振動モードを特定するとしてもよい。本発明によれば、上記同様に、前記振動モードを変位量の絶対値に基づいて精度良く特定することが可能となる。
【0012】
また、前記モード解析方法の前記第1の工程において、前記デジタルビデオカメラ群の撮影範囲に向け、発光装置による発光を行い、前記第2の工程において、前記映像を構成するフレームのうち前記発光装置による発光開始時点の発光が写り込んでいるフレームを、各デジタルビデオカメラ間での同期がとられた所定時点と特定し、このフレームを起点に一定時間毎の静止画像を抽出するとしてもよい。
【0013】
従来では、測定装置間の同期をとるために、例えば電気信号を測定装置に一斉通知するなどの手法がとられていたが、マイクロ秒単位での同期が必要なことから、各測定装置に固有の動作時間の差異、ネットワーク遅延等の問題があって、精度良く同期を図ることはかなり困難であった。しかしながら、上記のような本発明によれば、各デジタルビデオカメラに固有の差異等に関係なく、デジタルビデオカメラ間で同時刻に撮影されたフレームを起点として特定することができる。なお、各デジタルビデオカメラのうち、発光装置からの発光を直接撮影できない位置にあるものについては、発光装置と該デジタルビデオカメラとの間に、前記発光を導く鏡等の反射材を適宜設置し、反射光をデジタルビデオカメラの撮影領域に導くとしてもよい。
【0014】
また、前記モード解析方法の前記第1の工程において、前記デジタルビデオカメラ群の撮影範囲に向けた、前記発光装置による発光を、所定時間のみの短時間発光とし、前記第2の工程において、前記映像を構成するフレームのうち前記発光装置による短時間発光が写り込んでいるフレームを、各デジタルビデオカメラ間での同期がとられた所定時点と特定し、このフレームを起点に一定時間毎の静止画像を抽出するとしてもよい。このように、発光装置による発光を短時間の発光、例えばフラッシュの発光のごときものとすれば、発光が写り込むフレーム数が限定的となって、その他のフレームとの区別が明確になり、ひいては各デジタルビデオカメラ間での同期がとられた所定時点を確実に特定することが可能になる。
【0015】
また、本発明のモード解析システムは、構造物における複数の観測点をデジタルビデオカメラ群と、情報処理装置とを含み、前記情報処理装置は、前記デジタルビデオカメラ群が撮影で得た各観測点に関する映像から、各デジタルビデオカメラ間での同期がとられた所定時点を起点に所定時間毎の静止画像を抽出し、該静止画像中における所定画素に関して各静止画像間での変位方向を特定する処理と、前記特定した各観測点での変位方向に基づき、前記構造物の各観測点を連ねた領域に関する変形モードを特定する処理とを実行するものである、ことを特徴とする。
【発明の効果】
【0016】
本発明によれば、精度良好なモード解析を簡便かつ低コストで行うことが可能となる。
【図面の簡単な説明】
【0017】
【図1】本実施形態におけるモード解析システムの説明図である。
【図2】本実施形態におけるモード解析システムを構成する各装置類のハードウェア構成例を示す図である。
【図3】本実施形態のモード解析方法の処理手順例を示す説明図である。
【図4】本実施形態の二値化画像例を示す説明図である。
【図5】本実施形態の変位例を示す説明図である。
【図6】本実施形態の処理結果例1を示す説明図である。
【図7】本実施形態の処理結果例2を示す説明図である。
【図8】本実施形態の処理結果例3を示す説明図である。
【発明を実施するための形態】
【0018】
−−−システム等の構成例−−−
以下に本発明の実施形態について図面を用いて詳細に説明する。図1は、本実施形態におけるモード解析システム10の説明図である。本実施形態のモード解析システム10は、精度良好なモード解析を簡便かつ低コストで行うものであり、図1に示すように、情報処理装置100および複数のデジタルビデオカメラ200で構成されている。
【0019】
ここでは、解析対象の構造物として橋梁1の橋桁2を例示する。橋梁1を車両や鉄道など所定の重量を持った移動体が通行すれば、移動体の自重や移動速度の大きさ等に応じて橋桁2が鉛直方向に振動したり沈み込んだりすることとなる。橋梁1の健全性を診断したり、振動モードを把握する場合、こうした橋桁2の変位を観測し変位量を得ておくことは重要である。但し、変位量の絶対値が測定できず、変位方向しか観測できないような場合であっても、本実施形態のモード解析方法によれば変形モードや振動モードが判明し、解析対象の構造物について変位の傾向は明らかとなるから、技術的に十分な意義がある。
【0020】
ところで、前記橋梁1を構成する部材のうち橋桁2については、例えばH型鋼4が構成に含まれることが多い。H型鋼4は仕様が規格化された部材であり、予め各箇所の寸法は判明している。H型鋼4は橋脚7の間に渡されて、その側面であるフランジ5の端部6を橋桁2の側面3に露出している。このフランジ端部6の厚みは仕様に応じて決まっており、つまり、鉛直方向の寸法が判明していると言える。
【0021】
本実施形態では、こうしたH型鋼4における、例えば橋桁延長方向に一定距離毎に離間した複数のフランジ端部6(すなわち複数の観測点)のそれぞれに対し、デジタルビデオカメラ200を配置して映像を撮影して変位量を算定し、ひいてはモード解析を行うこととする。勿論、橋桁2を構成するH型鋼以外の部材の所定箇所を観測点としてもよい。
【0022】
従って、デジタルビデオカメラ200は、例えば、前記観測点の数だけ、橋梁1の周囲に配置される。勿論、全観測点のうち複数の観測点(フランジ端部6)を一度に撮影範囲に収めるデジタルビデオカメラ200を配置し、観測点の総数以下のデジタルビデオカメラ200でデジタルビデオカメラ群を構成するとしてもよい。
【0023】
なお、前記モード解析システム10において、前記デジタルビデオカメラ群の撮影範囲に向け発光を行う発光装置300が含まれるとすれば好適である。この発光装置300としては、例えばカメラ撮影時に使用されるフラッシュを採用できる。発光装置300による発光は、デジタルビデオカメラ200が撮影した映像中に写り込むことになる。映像中に写り込んだ発光は、後述する情報処理装置100での処理に際し、各デジタルビデオカメラ間での同期がとられた所定時点の目印となるものである。すなわち、情報処理装置100は、映像を構成するフレームのうち前記発光が写り込んでいるフレームを、各デジタルビデオカメラ間での同期がとられた所定時点と特定するのである。従って、複数フレームを跨って発光が撮影されないよう、フレームレートが示す1フレームの撮影時間以下で前記発光がなされるよう、発光装置300での発光時間はごく短時間に調整してある。
【0024】
なお、発光装置300による発光時間は、上述のフラッシュの如くごく短時間であればフレーム特定が容易となり好適であるが、発光時間がフラッシュほど短時間でなくとも本実施形態の実行は可能である。発光の写り込みが始まったフレームを、各デジタルビデオカメラ間での同期がとられたフレームとして特定できるからである。
【0025】
図に示すように、前記発光装置300の発光がデジタルビデオカメラ200の撮影範囲に入らないおそれがある場合、発光装置300で発光された光が障害物等を回避してデジタルビデオカメラ200に到達できるよう、適宜な位置に反射材として鏡400を配置するとしてもよい。このような形態を採用すれば、構造物周囲がデジタルビデオカメラ200を配置するのも困難なほど狭小であったり、交通量や障害物が多かったりといった困難な状況であっても、これに柔軟に対応して発光装置300からの発光をデジタルビデオカメラ200に導くことができる。ひいては、より確実に上述の所定契機の特定が可能になる。
【0026】
従来では、測定装置間の同期をとるために、例えば電気信号を測定装置に一斉通知するなどの手法がとられていたが、マイクロ秒単位での同期が必要である一方、各測定装置に固有の動作時間の差異、ネットワーク遅延等の問題があって、精度良く同期を図ることはかなり困難であった。しかしながら、上記のように発光装置300の発光を利用することで、各デジタルビデオカメラに固有の差異等に関係なく、デジタルビデオカメラ間で同時刻に撮影されたフレームを起点として特定することができる。
【0027】
続いて、本実施形態のモード解析システム10を構成する各装置について、そのハードウェア構成を詳述する。図2は、本実施形態におけるモード解析システム10を構成する各装置らのハードウェア構成例を示す図である。本実施形態のモード解析システム10を構成する情報処理装置100は、コンピュータとして備えるべき、ハードディスクドライブなど不揮発性記憶装置たる記憶部101、RAMなど揮発性記憶装置たるメモリ103、記憶部101のプログラム102をメモリ103に読み出して実行するCPUたる演算部104、ユーザからの指示を受け付けるキーボードやマウス等の入力部105、処理結果を出力するディスプレイ装置やスピーカーといった出力部106、他装置とデータ授受を行うためのインターフェイス部107を備えている。
【0028】
また、モード解析システム10を前記情報処理装置100と共に構成するデジタルビデオカメラ200は、所定レベルのフレームレートで動画撮影が可能なビデオカメラであり、ビデオカメラとして備えるべき一般的構成は勿論具備している。このデジタルビデオカメラ200は、撮影用の光学系装置209や映像データの格納用媒体210(各種記録媒体とそのリーダライタ、ハードディスクドライブ等)の他に、映像データのデジタル処理など各種情報処理を実行するためのコンピュータチップが備わっている。このコンピュータチップは、不揮発性記憶装置たる記憶部201、揮発性記憶装置たるメモリ203、記憶部201からプログラム202をメモリ203に読み出して実行するCPUたる演算部204、および他装置とデータ授受を行うためのインターフェイス部207を含んでいる。
【0029】
続いて、モード解析システム10を構成する情報処理装置100の演算部104が、プログラム102の実行により実現する処理について説明する。情報処理装置100は、複数のフランジ端部6を含む所定領域に対する撮影で各デジタルビデオカメラ200が得た各フランジ端部6に関する映像データを、例えば、各デジタルビデオカメラ200のインターフェイス部207から取得し、該映像データから、各デジタルビデオカメラ間での同期がとられた所定時点を起点に所定時間毎の静止画像を抽出し、該静止画像中における所定画素に関して、各静止画像間での変位方向を特定する処理、ないしは、各静止画像間での変位を特定することで各観測点での所定時間毎の変位量を算定する処理を実行する。変位量の絶対値が得られる場合は、各観測点での所定時間毎の変位量を算定する処理を実行するとすれば、変形モードひいては振動モードの特定が精度良く行えるため好適である。
【0030】
なお、前記情報処理装置100は、前記抽出した各静止画像において前記フランジ端部6を含む所定範囲の画像について二値化処理を行う処理を実行することとなる。画像の二値化処理は、例えば、画素の濃淡情報が一定閾値より小さければ白色、一定閾値より大きければ黒色といった具合に、各画素を黒白二色に振り分ける処理となる。こうした二値化処理の手法自体は従来手法を採用すればよい。また、こうした二値化処理を実行するためのプログラムが前記プログラム102には含まれている。
【0031】
なお、デジタルビデオカメラ200は、情報処理装置100からの映像データの取得要求をインターフェイス部207にて受け付け、この要求に応じて格納用媒体210から映像データを読み出し、これをインターフェイス部207を介して情報処理装置100に送信する。或いは、情報処理装置100のインターフェイス部107に接続された所定の読み取り装置に対し、ユーザが各デジタルビデオカメラ200の格納用媒体210をセットし、前記読み取り装置が格納用媒体210から読み取った映像データを情報処理装置100に送るとしてもよい。
【0032】
また、前記情報処理装置100は、二値化処理された前記所定範囲の画像において前記フランジ端部6を特定し、該特定したフランジ端部6の各静止画像間での画素数単位の変位と前記判明している寸法とに基づいて前記フランジ端部6の変位量を算定する処理を実行する。前記フランジ端部6とは異なり、解析対象の実寸法が予め判明しておらず、変位量の算定処理が出来ない場合、前記情報処理装置100は、例えば静止画像中における所定の基準位置からの画素の変位方向を判定する処理を行う。前記基準位置の例としては、静止画像中の解析対象における重心を含んで鉛直ないし水平に延びる直線状の軸線の位置、を想定できる。情報処理装置100は該当画素がその基準位置より上下左右のいずれの位置にあるか判定し、基準位置から見て該当位置の方向に画素が変位したと特定できる。
【0033】
二値化処理された前記所定範囲の画像においてフランジ端部6を特定する処理は、情報処理装置100が、例えば入力部105にてユーザから該当画像の指定を受けて特定する場合があげられる。或いは、情報処理装置100が、フランジ端部6の形状パターンのデータ(例:フランジ端部6を描画する際の各線分の長さと描画角度等のデータ)を記憶部101に保持していて、その形状パターンに合致する黒色画素の集合体をフランジ端部6と認識するといった画像認識処理を行う場合もあげられる。
【0034】
また、特定したフランジ端部6の各静止画像間での画素数単位の変位は、例えば、各静止画像の座標平面上における、前記フランジ端部6に対応した画素の座標値を、所定時間間隔の静止画像間で比較し、各静止画像の前記座標値の間の距離を算定することで得られる。当然、画素の変位量がそのまま実際のフランジ端部6の変位量とならないから、その場合、既知の寸法値に対する画素数から単位画素あたりの変位量を示す係数値を情報処理装置100が記憶部101等に予め保持しておき、各静止画像の前記座標値の間の距離すなわち画素の変位量に前記係数値を乗算し、フランジ端部6の変位量を算定するとすればよい。
【0035】
また、前記情報処理装置100は、前記特定した各フランジ端部6での変位方向に基づき、前記橋梁1の各フランジ端部6を連ねた領域に関する変形モードを特定するか、或いは、前記算定した各フランジ端部6での所定時間毎の変位量に基づき、前記橋梁1の各フランジ端部6を連ねた領域に関する変形モードを特定する。また、前記情報処理装置100は、前記特定した変形モードを時系列順に連続させて振動モードを特定するか、或いは前記所定時間毎の変位量に基づいて前記領域に関し特定した変形モードを、時系列順に連続させて振動モードを特定する。こうした変形モード、振動モードを特定する処理の詳細については後述する。
【0036】
ここで、CPU等の演算部によりプログラムを実行することで、必要な機能を実装する例をあげたが、必要な機能を実現する電子回路等を前記情報処理装置100やデジタルビデオカメラ200が備えていて、同様の処理を実行するとしても勿論問題ない。
【0037】
−−−モード解析方法の手順例−−−
次に、本実施形態におけるモード解析方法の処理手順について説明する。図3は、本実施形態におけるモード解析方法の処理手順例を示す説明図である。まず、解析対象となる橋桁2の各所に存在するフランジ端部6のそれぞれに対し、レンズを向けてデジタルビデオカメラ200を設置する(s100)。フランジ端部6とデジタルビデオカメラ200との間の距離は、デジタルビデオカメラ200の望遠撮影機能において所定解像度で前記フランジ端部6を撮影できる距離となる。また、当然ではあるが、橋桁2におけるH型鋼4のフランジ端部6が撮影範囲に収まるよう、デジタルビデオカメラ200の設置高さ、上下左右のレンズ角度は調整される。
【0038】
上述のように設置がなされたデジタルビデオカメラ200のインターフェイス部207と、情報処理装置100のインターフェイス部107とは所定の通信ケーブル、ないし無線通信手段でデータ授受可能に接続しておくと好適である。
【0039】
各デジタルビデオカメラ200は、観測担当者からの指示を例えばリモコンからの赤外線通信等を介して受信し、自身が撮影を担当するフランジ端部6に対する撮影を開始する(s101)。或いは、デジタルビデオカメラ200が、自身で備えるタイマー機能206等で予めセットされた一定時刻の到来を検知して、自律的に撮影を開始するとしてもよい。また、前記発光装置300が、上記観測担当者からの指示を前記デジタルビデオカメラ200と同様に受けて、指示受信から一定時間後に所定時間だけ発光動作を行う(s102)。一定時間後に発光動作を行うのは、デジタルビデオカメラ群を構成する各デジタルビデオカメラ200が確実に該発光を撮影できるよう、全てのデジタルビデオカメラ200において撮影が開始済みとなったタイミングを見計らう意図がある。
【0040】
各デジタルビデオカメラ200は、撮影の進行と共に、得られた映像データを格納用媒体210に格納している。当然、この映像データを構成するいずれかのフレームには、前記発光装置300による発光が写り込んでいる。各デジタルビデオカメラ200はインターフェイス部207を介して接続された情報処理装置100に対し、映像データを一定時間毎またはリアルタイムにアップロードするとしてもよい。
【0041】
一方、情報処理装置100は、映像データ取得要求を各デジタルビデオカメラ200に通知する(s103)。他方、各デジタルビデオカメラ200は、情報処理装置100からの映像データ取得要求をインターフェイス部207にて受け付け、この要求に応じて格納用媒体210から映像データを読み出し、これをインターフェイス部207を介して情報処理装置100に送信する(s104)。或いは、情報処理装置100のインターフェイス部107に接続された所定の読み取り装置に対し、ユーザが各デジタルビデオカメラ200の格納用媒体210をセットし、前記読み取り装置が格納用媒体210から読み取った映像データを情報処理装置100に送るとしてもよい。
【0042】
こうして情報処理装置100は、前記フランジ端部6を含む所定領域に関する映像データを、前記デジタルビデオカメラ200から取得し(s105)、記憶部101に格納する。また情報処理装置100は、前記ステップで取得した映像データを一定期間毎に記憶部101から読み出し、各デジタルビデオカメラ間での同期がとられた所定時点、すなわち前記発光装置300による発光開始時点の発光が写り込んでいるフレームを起点に、1/30秒といった所定時間毎すなわち各フレームの静止画像を抽出する(s106)。動画からの静止画像の抽出処理については既存の技術を適用すればよい。
【0043】
次に情報処理装置100は、前記ステップで抽出した各静止画像において、前記H型鋼4のフランジ端部6を含む所定範囲の画像について二値化処理を行う(s107)。画像の二値化処理は、例えば、画素の濃淡情報(コントラスト情報)が示す値と一定閾値とを比較し、濃淡値が閾値より小さければ白色、逆に濃淡値が閾値より大きければ黒色といった具合に、各画素を黒白二色に振り分ける処理となる。こうした二値化処理の手法自体は従来手法を採用すればよい。また、こうした二値化処理を実行するためのプログラムが前記プログラム102には含まれている。
【0044】
続いて情報処理装置100は、前記ステップで二値化処理された前記所定範囲の画像において、前記フランジ端部6を特定する(s108)。二値化処理された前記所定範囲の画像(図4参照)においてフランジ端部6を特定する処理は、情報処理装置100が、例えば入力部105にてユーザから該当画像の指定(範囲指定や要素指定など)を受けて特定する場合があげられる。或いは、情報処理装置100が、フランジ端部6の形状パターンのデータ(例:フランジ端部6を描画する際の各線分の長さ、線分間の距離、描画角度等のデータ)を記憶部101に保持していて、その形状パターンに合致する黒色画素の集合体をフランジ端部6と認識するといった画像認識処理を行う場合もあげられる。
【0045】
情報処理装置100は、前記ステップで特定したフランジ端部6の、各静止画像間での画素数単位の変位と前記判明している寸法とに基づいて前記フランジ端部6の変位量を算定する(s109)。フランジ端部6の各静止画像間での画素数単位の変位は、例えば、各静止画像の座標平面上における、前記フランジ端部6に対応した画素の座標値を、一定時間間隔の静止画像間で比較し、各静止画像の前記座標値の間の距離を算定することで得られる。当然、画素の変位量がそのまま実際のフランジ端部6の変位量とならないから、その場合、既知の寸法値に対する画素数から単位画素あたりの変位量を示す係数値を情報処理装置100が記憶部101等に予め保持しておき、各静止画像の前記座標値の間の距離すなわち画素の変位量に前記係数値を乗算し、フランジ端部6の変位量を算定するとすればよい。
【0046】
例えば、図5の例で示すように、時刻Aの静止画像におけるフランジ端部6の所定画素xの座標値(10,10)、時刻Aから1/30秒後の時刻Bの静止画像における前記所定画素xの座標値(10,12)、とする。この場合、画素xは1/30秒の間に、“12−10”=2ピクセルだけ鉛直方向に移動したことがわかる。前記フランジ端部6の鉛直方向の寸法、すなわちフランジ端部6の実際の厚みが例えば20mmであり、静止画像中での該当箇所を示す画素の数が100ピクセルであった場合、画素1ピクセルあたりのフランジ端部6の実際の寸法値は0.2(mm)となる。これは鉛直方向における単位画素変位あたりの実際の変位量に相当する値であり、情報処理装置100はこの値を係数値として記憶部101に予め保持している。この場合、情報処理装置100は、前記画素xの変位量たる2ピクセルに対し、前記係数値である0.2を乗算し、前記時刻A−B間でのフランジ端部6の変位量を“2×0.2”=0.4(mm)と算定する。上述のように、画像中での画素変位とフランジ端部6での実際の変位は両者とも鉛直方向で一致し、前記単位画素変位あたりのフランジ端部6の実際の変位量も特定されているから、フランジ端部6に正対せず例えば斜め横方向からの撮影がなされた場合であっても、得られた画像に基づいた誤差の無い変位量算定が行えることになる。
【0047】
勿論、上述のように各フレーム毎にフランジ端部6の変位量を算定するのではなく、沈み込みなど比較的長いタイムスパンでの変位に着目して、例えば0.5秒間隔での変位量算定を行うといった処理形態を採用してもよい。
【0048】
情報処理装置100は、上述したステップs109の処理を、例えば、各観測点すなわち各フランジ端部6に関する前記映像データから得ている全ての静止画像について実行する(s110)。ここでの処理結果は、図6に示すグラフのように、経過時間毎の各フランジ端部6の変位量を示す折れ線グラフといったものがあげられる。
【0049】
情報処理装置100は、こうして求めた、各時間帯での各フランジ端部6における変位量に基づいて、各時間帯での各フランジ端部6の位置を認識し、これらフランジ端部6を結んで構成される線形の時間帯毎の形状、すなわち変形モードを特定する(s111:図7参照)。図7に示すように、橋軸方向だけでなく橋幅方向についても変位の分布はあり、いずれの方向についてもモード解析が可能である。また、情報処理装置100は、前記変形モードを時系列順に連続させて、橋桁2の振動モードを特定する(s113)としてもよい。図7の例では、車両等が通過していない負荷無しの状態から、条件に応じて変形モードが推移していく振動モードを例示している。橋桁2において、通行車両の重量や通過間隔、重量やサイズが異なる複数車両の連続通行事象など、様々な条件によって振動モードは変化する。また、橋桁2の延長形状は、直線またはカーブ、上り坂または下り坂、それらの組み合わせ、といった具合に場所により種々変化するが、こうした条件によっても振動モードは変化する。本実施形態のモード解析システム10であれば、デジタルビデオカメラ200による撮影と情報処理装置100による情報処理でモード解析を簡便かつ確実に行えるから、上述したように条件が複雑に変化する構造物であっても問題なく適用し高精度のモード解析を実現できる。
【0050】
情報処理装置100は、前記ステップで特定した変形モードや振動モードの情報を出力部106に表示処理し(s112)、フローを終了することになる。
【0051】
なお、モード解析対象となる前記構造物としては、前記橋梁1の他に、例えば、各種ビル、管路、架線なども想定できる。例えばビルに生じる変形についてそのモード解析を行った場合、図8に例示するように、ビル全体が中位階を中心にはらみだす形態となる振動モード(図中のモードA)、或いは、ビル上位階が側方に振られる振動モード(図中のモードB)などといったモード解析結果を得られる。ビルでは変位挙動がビル全体にわたることもあるなど変位観測が行いにくく、上記橋桁2のように変位量の絶対値を測定することが容易でない場合があるが、本実施形態のモード解析方法を採用すれば、例えば所定の観測点における所定時間の変位方向(例えば、ビルを上下に貫く所定軸を基準にした変位方向)を特定し、ここで特定した各観測点の変位方向を結んで変形モードの情報を得ることができる。
【0052】
この場合、前記情報処理装置100は前記ビルが撮影された各静止画像中の所定画素が前記基準位置より左右のいずれの位置にあるか判定し、基準位置から見て該当位置の方向に画素すなわちビルの所定箇所が変位したと特定できる。従って、静止画像中の所定画素がある時間帯にどの方向に移動したか判明することになる。こうして変位方向が判明した各所について、前記基準位置からの移動方向に変位があったとして線分を結べば、図7に例示したものと同様の変形モードの情報が得られる。また、この変形モードを時系列順に連続させれば振動モードの特定も可能である。
【0053】
以上のような本実施形態によれば、精度良好なモード解析を簡便かつ低コストで行うことが可能となる。
【0054】
本発明の実施の形態について、その実施の形態に基づき具体的に説明したが、これに限定されるものではなく、その要旨を逸脱しない範囲で種々変更可能である。
【符号の説明】
【0055】
1 橋梁(構造物)
2 橋桁
3 橋桁の側面
4 H型鋼
5 フランジ
6 フランジ端部(観測点)
7 橋脚
10 モード解析システム
100 情報処理装置
101 記憶部
102 プログラム
103 メモリ
104 演算部
105 入力部
106 出力部
107 インターフェイス部
200 デジタルビデオカメラ
201 記憶部
202 プログラム
203 メモリ
204 演算部
206 タイマー機能
207 インターフェイス部
300 発光装置
400 鏡
【特許請求の範囲】
【請求項1】
構造物における複数の観測点をデジタルビデオカメラ群により撮影する第1の工程と、
前記撮影で得た各観測点に関する映像から、各デジタルビデオカメラ間での同期がとられた所定時点を起点に所定時間毎の静止画像を抽出し、該静止画像中における所定画素に関して各静止画像間での変位方向を特定する第2の工程と、
前記特定した各観測点での変位方向に基づき、前記構造物の各観測点を連ねた領域に関する変形モードを特定する第3の工程と、
を含むことを特徴とするモード解析方法。
【請求項2】
請求項1において、
前記特定した変形モードを時系列順に連続させて振動モードを特定する第4の工程を含むことを特徴とするモード解析方法。
【請求項3】
前記第2の工程において、前記撮影で得た各観測点に関する映像から、各デジタルビデオカメラ間での同期がとられた所定時点を起点に所定時間毎の静止画像を抽出し、該静止画像中における所定画素に関して各静止画像間での変位を特定することで各観測点での所定時間毎の変位量を算定し、
前記第3の工程において、前記算定した各観測点での所定時間毎の変位量に基づき、前記構造物の各観測点を連ねた領域に関する変形モードを特定する、
ことを特徴とする請求項1に記載のモード解析方法。
【請求項4】
前記第4の工程において、前記所定時間毎の変位量に基づいて前記領域に関し特定した変形モードを、時系列順に連続させて振動モードを特定することを特徴とする請求項3に記載のモード解析方法。
【請求項5】
前記第1の工程において、前記デジタルビデオカメラ群の撮影範囲に向け、発光装置による発光を行い、
前記第2の工程において、前記映像を構成するフレームのうち前記発光装置による発光開始時点の発光が写り込んでいるフレームを、各デジタルビデオカメラ間での同期がとられた所定時点と特定し、このフレームを起点に一定時間毎の静止画像を抽出することを特徴とする請求項1〜4のいずれかに記載のモード解析方法。
【請求項6】
前記第1の工程において、前記デジタルビデオカメラ群の撮影範囲に向けた、前記発光装置による発光を、所定時間のみの短時間発光とし、
前記第2の工程において、前記映像を構成するフレームのうち前記発光装置による短時間発光が写り込んでいるフレームを、各デジタルビデオカメラ間での同期がとられた所定時点と特定し、このフレームを起点に一定時間毎の静止画像を抽出することを特徴とする請求項5に記載のモード解析方法。
【請求項7】
構造物における複数の観測点をデジタルビデオカメラ群と、情報処理装置とを含み、
前記情報処理装置は、
前記デジタルビデオカメラ群が撮影で得た各観測点に関する映像から、各デジタルビデオカメラ間での同期がとられた所定時点を起点に所定時間毎の静止画像を抽出し、該静止画像中における所定画素に関して各静止画像間での変位方向を特定する処理と、
前記特定した各観測点での変位方向に基づき、前記構造物の各観測点を連ねた領域に関する変形モードを特定する処理とを実行するものである、
ことを特徴とするモード解析システム。
【請求項1】
構造物における複数の観測点をデジタルビデオカメラ群により撮影する第1の工程と、
前記撮影で得た各観測点に関する映像から、各デジタルビデオカメラ間での同期がとられた所定時点を起点に所定時間毎の静止画像を抽出し、該静止画像中における所定画素に関して各静止画像間での変位方向を特定する第2の工程と、
前記特定した各観測点での変位方向に基づき、前記構造物の各観測点を連ねた領域に関する変形モードを特定する第3の工程と、
を含むことを特徴とするモード解析方法。
【請求項2】
請求項1において、
前記特定した変形モードを時系列順に連続させて振動モードを特定する第4の工程を含むことを特徴とするモード解析方法。
【請求項3】
前記第2の工程において、前記撮影で得た各観測点に関する映像から、各デジタルビデオカメラ間での同期がとられた所定時点を起点に所定時間毎の静止画像を抽出し、該静止画像中における所定画素に関して各静止画像間での変位を特定することで各観測点での所定時間毎の変位量を算定し、
前記第3の工程において、前記算定した各観測点での所定時間毎の変位量に基づき、前記構造物の各観測点を連ねた領域に関する変形モードを特定する、
ことを特徴とする請求項1に記載のモード解析方法。
【請求項4】
前記第4の工程において、前記所定時間毎の変位量に基づいて前記領域に関し特定した変形モードを、時系列順に連続させて振動モードを特定することを特徴とする請求項3に記載のモード解析方法。
【請求項5】
前記第1の工程において、前記デジタルビデオカメラ群の撮影範囲に向け、発光装置による発光を行い、
前記第2の工程において、前記映像を構成するフレームのうち前記発光装置による発光開始時点の発光が写り込んでいるフレームを、各デジタルビデオカメラ間での同期がとられた所定時点と特定し、このフレームを起点に一定時間毎の静止画像を抽出することを特徴とする請求項1〜4のいずれかに記載のモード解析方法。
【請求項6】
前記第1の工程において、前記デジタルビデオカメラ群の撮影範囲に向けた、前記発光装置による発光を、所定時間のみの短時間発光とし、
前記第2の工程において、前記映像を構成するフレームのうち前記発光装置による短時間発光が写り込んでいるフレームを、各デジタルビデオカメラ間での同期がとられた所定時点と特定し、このフレームを起点に一定時間毎の静止画像を抽出することを特徴とする請求項5に記載のモード解析方法。
【請求項7】
構造物における複数の観測点をデジタルビデオカメラ群と、情報処理装置とを含み、
前記情報処理装置は、
前記デジタルビデオカメラ群が撮影で得た各観測点に関する映像から、各デジタルビデオカメラ間での同期がとられた所定時点を起点に所定時間毎の静止画像を抽出し、該静止画像中における所定画素に関して各静止画像間での変位方向を特定する処理と、
前記特定した各観測点での変位方向に基づき、前記構造物の各観測点を連ねた領域に関する変形モードを特定する処理とを実行するものである、
ことを特徴とするモード解析システム。
【図1】


【図2】
【図3】
【図6】
【図7】
【図8】
【図4】
【図5】
【図2】
【図3】
【図6】
【図7】
【図8】
【図4】
【図5】
【公開番号】特開2013−7625(P2013−7625A)
【公開日】平成25年1月10日(2013.1.10)
【国際特許分類】
【出願番号】特願2011−139712(P2011−139712)
【出願日】平成23年6月23日(2011.6.23)
【出願人】(000000549)株式会社大林組 (1,758)
【Fターム(参考)】
【公開日】平成25年1月10日(2013.1.10)
【国際特許分類】
【出願日】平成23年6月23日(2011.6.23)
【出願人】(000000549)株式会社大林組 (1,758)
【Fターム(参考)】
[ Back to top ]