
リレーノードシミュレーター及び試験方法
【課題】基地局、リレーノード、及び被試験端末の位置関係と、その位置関係に応じた遅延量または減衰量を確認可能に表示画面上に表示させて、それらの値を容易に設定可能なリレーノードシミュレーターを提供する。
【解決手段】リレーノードを模擬し、第1及び第2のRF信号が多重された試験信号を移動体通信端末に送信するリレーノードシミュレーターであって、基地局マーカー、リレーノードマーカー、及び端末マーカーを操作画面上に表示させるマーカー表示制御部と、各マーカーの位置を特定する位置特定部と、基地局マーカー及びリレーノードマーカーの位置に対して端末マーカーの位置を変数として遅延量を算出する遅延量算出部と、端末マーカーの位置に応じた遅延量を識別可能に操作画面上に表示させるパターン表示制御部とを備え、指定された端末マーカーの位置に対応する遅延量に応じた試験信号を生成する。
【解決手段】リレーノードを模擬し、第1及び第2のRF信号が多重された試験信号を移動体通信端末に送信するリレーノードシミュレーターであって、基地局マーカー、リレーノードマーカー、及び端末マーカーを操作画面上に表示させるマーカー表示制御部と、各マーカーの位置を特定する位置特定部と、基地局マーカー及びリレーノードマーカーの位置に対して端末マーカーの位置を変数として遅延量を算出する遅延量算出部と、端末マーカーの位置に応じた遅延量を識別可能に操作画面上に表示させるパターン表示制御部とを備え、指定された端末マーカーの位置に対応する遅延量に応じた試験信号を生成する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、基地局と移動体通信端末との間の通信を中継するリレーノードを模擬するための、リレーノードシミュレーターの技術に関する。
【背景技術】
【0002】
次世代移動通信システムの無線アクセス方式として、LTE(Long Term Evolution)を更に発展させたLTE−Advancedの標準化が、3GPPにより進められている。LTE−Advancedでは、レイヤ3レベルで基地局と移動体通信端末との間の無線信号を再生中継するリレー技術が検討されている。このようなリレー技術が用いられたリレーノードを適用することで、交換局及び無線基地局等の移動通信システムを構成する装置間を有線で接続するための有線バックホール回線の確保が困難な場所等における、効率的なカバレッジの拡大が期待されている(特許文献1)。
【0003】
このようなリレーノードでは、基地局とリレーノードとの間の無線バックホール回線と、リレーノードと移動体通信端末との間の無線アクセス回線とを、同一周波数で運用する場合がある。このような場合には、これらの回線間で十分なアイソレーションが確保されていない場合には、送信信号がリレーノードの受信部に回り込み、干渉を引き起こす。そのため、同一周波数で運用する場合には、無線バックホール回線及び無線アクセス回線の無線リソースを時分割多重(TDM:Time Division Multiplexing)し、リレーノードにおいて送受信が同時に行われないように制御される。なお、前述の構成の他に、基地局から継続して信号を出力し、基地局からの信号とリレーノードからの信号とに対してリソースエレメントの割当てを制御することで、これらの信号の干渉を防止する構成も検討されているが、このような構成にも対しても、本発明は適用できる。以降では、前述の時分割多重の構成を例として説明する。
【0004】
しかしながら、基地局、リレーノード、及び移動体通信端末の位置関係によっては、各信号のレベルが変動したり、いずれかの信号に遅延が生じる場合がある。例えば、基地局から送信された信号のレベルは、移動体通信端末により受信されるまでに、基地局と移動体通信との間の距離に応じて減衰する。同様に、リレーノードから送信された信号のレベルは、移動体通信端末により受信されるまでに、リレーノードと移動体通信との間の距離に応じて減衰する。また、いずれかの信号に遅延が生じた場合には、これらの信号間で干渉が生じる場合がある。そのため、このような信号のレベルの変動や遅延が生じた場合を想定して、被試験端末である移動体通信端末の動作を検証する必要があり、このような環境を模擬するシミュレーターが求められている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2011−82678号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
この発明は、基地局、リレーノード、及び被試験端末の位置関係と、その位置関係に応じた遅延量または減衰量を確認可能に表示画面上に表示させ、それらの値を容易に設定可能なリレーノードシミュレーターを提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するために、請求項1に記載の発明は、基地局からの第1のRF信号を中継して第2のRF信号として移動体通信端末へ送信するリレーノードを模擬し、前記第1のRF信号と前記第2のRF信号とが多重された信号を模擬した試験信号を試験対象の移動体通信端末に送信するリレーノードシミュレーターであって、前記基地局に相当する基地局マーカー(VeNB)と、前記リレーノードに相当するリレーノードマーカー(VRN)と、前記移動体通信端末に相当する端末マーカー(VUE)とを所定の座標系に対応付けて、操作画面上に相対的に移動可能に表示させるマーカー表示制御部(1821)と、前記座標系における、前記基地局マーカー、前記リレーノードマーカー、及び前記端末マーカーのそれぞれの位置を特定する位置特定部(181)と、特定された前記基地局マーカーの位置と前記リレーノードマーカーの位置とに対して、前記端末マーカーの位置を変数として、前記移動体通信端末に到達するまでの前記第2のRF信号の遅延量を算出する遅延量算出部(183)と、算出された前記遅延量に基づき、前記端末マーカーの位置に応じた前記遅延量の大きさを識別可能なパターン(G11)として前記操作画面上に表示させるパターン表示制御部(1822)と、を備え、前記パターン上で前記端末マーカーの位置が指定されたときに、前記第1のRF信号と当該指定位置に対応する前記遅延量が与えられた前記第2の信号とが多重された信号を模擬した前記試験信号を送信することを特徴とするリレーノードシミュレーター(1)である。
また、請求項2に記載の発明は、請求項1に記載のリレーノードシミュレーターであって、前記遅延量算出部は、前記座標系における、前記基地局マーカーと前記リレーノードマーカーとの間の距離に基づき前記遅延量を算出することを特徴とする。
また、請求項3に記載の発明は、請求項1または請求項2に記載のリレーノードシミュレーターであって、前記パターン表示制御部は、前記パターンとして、算出された前記遅延量が略同一の前記位置を結んだ曲線を、前記遅延量ごとに前記操作画面上に表示させることを特徴とする。
また、請求項4に記載の発明は、基地局からの第1のRF信号を中継して第2のRF信号として移動体通信端末へ送信するリレーノードを模擬し、前記第1のRF信号と前記第2のRF信号とが多重された信号を模擬した試験信号を試験対象の移動体通信端末に送信するリレーノードシミュレーターであって、前記基地局に相当する基地局マーカー(VeNB)と、前記リレーノードに相当するリレーノードマーカー(VRN)と、前記移動体通信端末に相当する端末マーカー(VUE)とを所定の座標系に対応付けて、操作画面上に相対的に移動可能に表示させるマーカー表示制御部(1821)と、前記座標系における、前記基地局マーカー、前記リレーノードマーカー、及び前記端末マーカーのそれぞれの位置を特定する位置特定部(181)と、前記基地局と前記リレーノードとのそれぞれの機器からの信号について、対応するマーカーからの前記座標系における距離に応じた減衰量を算出するゲイン算出部(184)と、算出された前記減衰量を基に、前記座標系の各位置における前記それぞれの機器からの信号の前記減衰量の大きさを識別可能なパターン(G21、G22)として前記操作画面上に表示させるパターン表示制御部(1822)と、を備え、前記パターン上で前記基地局マーカー、前記リレーノードマーカー、及び前記端末マーカーのそれぞれの位置が特定されたときに、当該特定位置に対応する前記基地局からの前記減衰量が与えられた前記第1のRF信号と当該特定位置に対応する前記リレーノードからの前記減衰量が与えられた前記第2のRF信号とが多重された信号を模擬した前記試験信号を送信することを特徴とするリレーノードシミュレーター(1)である。
また、請求項5に記載の発明は、基地局からの第1のRF信号を中継して第2のRF信号として移動体通信端末へ送信するリレーノードを模擬し、前記第1のRF信号と前記第2のRF信号とが多重された信号を模擬した試験信号を試験対象の移動体通信端末に送信するリレーノードシミュレーターであって、前記基地局に相当する基地局マーカー(VeNB)と、前記リレーノードに相当するリレーノードマーカー(VRN)と、前記移動体通信端末に相当する端末マーカー(VUE)とを所定の座標系に対応付けて、操作画面上に相対的に移動可能に表示させるマーカー表示制御部(1821)と、前記座標系における、前記基地局マーカー、前記リレーノードマーカー、及び前記端末マーカーのそれぞれの位置を特定する位置特定部(181)と、前記移動体通信端末が受信する信号について、前記端末マーカーからの前記座標系における距離に応じた減衰量を算出するゲイン算出部(184)と、算出された前記減衰量を基に、前記座標系の各位置における前記減衰量の大きさを識別可能なパターン(G31)として前記操作画面上に表示させるパターン表示制御部(182)と、を備え、前記パターン上で前記基地局マーカー、前記リレーノードマーカー、及び前記端末マーカーのそれぞれの位置が特定されたときに、前記特定位置に対応する前記基地局からの前記減衰量が与えられた前記第1のRF信号と当該特定位置に対応する前記リレーノードからの前記減衰量が与えられた前記第2のRF信号とが多重された信号を模擬した前記試験信号を送信することを特徴とするリレーノードシミュレーター(1)である。
また、請求項6に記載の発明は、基地局からの第1のRF信号を中継して第2のRF信号として移動体通信端末へ送信するリレーノードを模擬し、前記第1のRF信号と前記第2のRF信号とが多重された信号を模擬した試験信号を試験対象の移動体通信端末に送信する試験方法であって、前記基地局に相当する基地局マーカー(VeNB)と、前記リレーノードに相当するリレーノードマーカー(VRN)と、前記移動体通信端末に相当する端末マーカー(VUE)とを所定の座標系に対応付けて、操作画面上に相対的に移動可能に表示させる画面表示ステップと、前記座標系における、前記基地局マーカー、前記リレーノードマーカー、及び前記端末マーカーのそれぞれの位置を特定する位置特定ステップと、特定された前記基地局マーカーの位置と前記リレーノードマーカーの位置とに対して、前記端末マーカーの位置を変数として、前記移動体通信端末に到達するまでの前記第2のRF信号の遅延量を算出する遅延量算出ステップと、算出された前記遅延量に基づき、前記端末マーカーの位置に応じた前記遅延量の大きさを識別可能なパターン(G11)として前記操作画面上に表示させるパターン生成ステップと、前記パターン上で前記端末マーカーの位置が指定されたときに、前記第1のRF信号と当該指定位置に対応する前記遅延量が与えられた前記第2の信号とが多重された信号を模擬した前記試験信号を送信する送信ステップと、を備えたことを特徴とする試験方法である。
また、請求項7に記載の発明は、基地局からの第1のRF信号を中継して第2のRF信号として移動体通信端末へ送信するリレーノードを模擬し、前記第1のRF信号と前記第2のRF信号とが多重された信号を模擬した試験信号を試験対象の移動体通信端末に送信する試験方法であって、前記基地局に相当する基地局マーカー(VeNB)と、前記リレーノードに相当するリレーノードマーカー(VRN)と、前記移動体通信端末に相当する端末マーカー(VUE)とを所定の座標系に対応付けて、操作画面上に相対的に移動可能に表示させる画面表示ステップと、前記座標系における、前記基地局マーカー、前記リレーノードマーカー、及び前記端末マーカーのそれぞれの位置を特定する位置特定ステップと、前記基地局と前記リレーノードとのそれぞれの機器からの信号について、対応するマーカーからの前記座標系における距離に応じた減衰量を算出するゲイン算出ステップと、算出された前記減衰量を基に、前記座標系の各位置における前記それぞれの機器からの信号の前記減衰量の大きさを識別可能なパターン(G21、G22)として前記操作画面上に表示させるパターン生成ステップと、前記パターン上で前記基地局マーカー、前記リレーノードマーカー、及び前記端末マーカーのそれぞれの位置が特定されたときに、当該特定位置に対応する前記基地局からの前記減衰量が与えられた前記第1のRF信号と当該特定位置に対応する前記リレーノードからの前記減衰量が与えられた前記第2のRF信号とが多重された信号を模擬した前記試験信号を送信する送信ステップと、を備えたことを特徴とする試験方法である。
また、請求項8に記載の発明は、基地局からの第1のRF信号を中継して第2のRF信号として移動体通信端末へ送信するリレーノードを模擬し、前記第1のRF信号と前記第2のRF信号とが多重された信号を模擬した試験信号を試験対象の移動体通信端末に送信する試験方法であって、前記基地局に相当する基地局マーカー(VeNB)と、前記リレーノードに相当するリレーノードマーカー(VRN)と、前記移動体通信端末に相当する端末マーカー(VUE)とを所定の座標系に対応付けて、操作画面上に相対的に移動可能に表示させる画面表示ステップと、前記座標系における、前記基地局マーカー、前記リレーノードマーカー、及び前記端末マーカーのそれぞれの位置を特定する位置特定ステップと、前記移動体通信端末が受信する信号について、前記端末マーカーからの前記座標系における距離に応じた減衰量を算出するゲイン算出ステップと、算出された前記減衰量を基に、前記座標系の各位置における前記減衰量の大きさを識別可能なパターン(G31)として前記操作画面上に表示させるパターン生成ステップと、前記パターン上で前記基地局マーカー、前記リレーノードマーカー、及び前記端末マーカーのそれぞれの位置が特定されたときに、前記特定位置に対応する前記基地局からの前記減衰量が与えられた前記第1のRF信号と当該特定位置に対応する前記リレーノードからの前記減衰量が与えられた前記第2のRF信号とが多重された信号を模擬した前記試験信号を送信する送信ステップと、を備えたことを特徴とする試験方法である。
【発明の効果】
【0008】
本発明に係るリレーノードシミュレーター及び試験方法は、基地局マーカー及びリレーノードマーカーの位置に基づき、端末マーカーの位置を変化させた場合における、移動体通信端末に到達するまでの第1のRF信号に対する第2のRF信号の遅延量を算出し、この遅延量の大きさを識別可能に操作画面上に表示させる。そして、操作画面上で指定された端末マーカーの位置に対応する遅延量に応じた試験信号を生成して送信する。これにより、基地局マーカー、リレーノードマーカー、及び端末マーカーの位置関係を決めるだけで、この位置関係に応じた試験信号を生成するための遅延量を設定することが可能となり、この遅延量を容易に設定できる。
【0009】
また、本発明に係るリレーノードシミュレーター及び試験方法は、操作画面上で指定された端末マーカーからの座標系における距離に応じた減衰量を算出し、この減衰量の大きさを識別可能に操作画面上に表示させる。そして、操作画面上で特定された基地局マーカー、リレーノードマーカー、及び端末マーカーのそれぞれの位置に対応する減衰量に応じた試験信号を生成して送信する。これにより、基地局マーカー、リレーノードマーカー、及び端末マーカーの位置関係を決めるだけで、この位置関係に応じた試験信号を生成するための減衰量を設定することが可能となり、この減衰量を容易に設定できる。
【図面の簡単な説明】
【0010】
【図1】本発明に係るリレーノードシミュレーターの概略的な構成を示したブロック図である。
【図2A】ダウンリンク処理部の詳細な構成を示したブロック図である。
【図2B】UI制御部の詳細な構成を示したブロック図である。
【図3】基地局、リレーノード、及び移動体通信端末の位置関係を示した概略図である。
【図4A】基地局からの信号とリレーノードからの信号の関係を示した概略図である。
【図4B】基地局からの信号とリレーノードからの信号の関係を示した概略図である。
【図4C】基地局からの信号とリレーノードからの信号の関係を示した概略図である。
【図5A】本発明に係るUIの操作方法について説明するための図である。
【図5B】本発明に係るUIの操作方法について説明するための図である。
【図6A】UI上に表示されるパターンの一例である。
【図6B】UI上に表示されるパターンの一例である。
【図6C】UI上に表示されるパターンの一例である。
【図7】UI制御部の一連の動作を示したフローチャートである。
【発明を実施するための形態】
【0011】
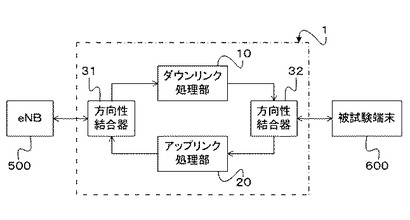
本発明に係るリレーノードシミュレーター1は、リレーノードを模擬するためのシミュレーターである。リレーノードシミュレーター1は、図1に示すように、eNB(基地局模擬装置)500と被試験端末600との間に介在する。リレーノードシミュレーター1は、ダウンリンク処理部10と、アップリンク処理部20と、方向性結合器31と、方向性結合器32とを含んで構成されている。
【0012】
方向性結合器31は、eNB500からRF信号(即ち、基地局信号)E0’を受けて、これをダウンリンク処理部10に伝送する。また、方向性結合器31は、アップリンク処理部20から信号を受けて、これをeNB500に転送する。
【0013】
ダウンリンク処理部10は、リレーノードのダウンリンクに係る処理を模擬するための処理ブロックである。ダウンリンク処理部10は、方向性結合器31を介してeNB500から送信されたアナログのRF信号E0’を受ける。ダウンリンク処理部10は、eNB500から信号を基にリレーノードの出力としてのベースバンド信号E1を生成するとともに、このベースバンド信号E1にeNB500からのベースバンド信号E0を合成してRF信号に変換し、試験信号として被試験端末600に向けて送信する。このダウンリンク処理部10の詳細な構成と動作については後述する。
【0014】
方向性結合器32は、ダウンリンク処理部10からの試験信号を受けて、これを被試験端末600に伝送する。また、方向性結合器32は、被試験端末600から送信された信号を受けて、これをアップリンク処理部20に伝送する。
【0015】
アップリンク処理部20は、リレーノードのアップリンクに係る処理を模擬するための処理ブロックである。アップリンク処理部20は、方向性結合器32を介して被試験端末600から送信されたアナログのRF信号を受ける。アップリンク処理部20は、このRF信号を復調し、所定の通信方式に基づきデジタルデータに復号する。アップリンク処理部20は、復号されたデジタルデータのうち、制御信号に相当するデータをリレーノードの設定に基づき書き替える。アップリンク処理部20は、このデジタルデータを所定の通信方式に基づき符号化し、アナログのRF信号に変調してeNB500に向けて送信する。なお、アップリンク処理部20の具体的な動作は、「3GPP TS36.211 V10.0.0」等で定義されている。
【0016】
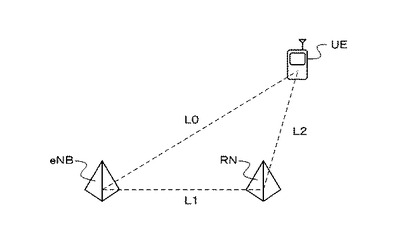
次に、ダウンリンク処理部10の詳細について説明する。まず、図3を参照する。図3は、基地局eNBと、リレーノードRNと、移動体通信端末UEとの位置関係を模式的に示した図である。例えば、基地局eNBと移動体通信端末UEとの間の距離をL0、基地局eNBとリレーノードRNとの間の距離をL1、リレーノードRNと移動体通信端末UEとの間の距離をL2とする。
【0017】
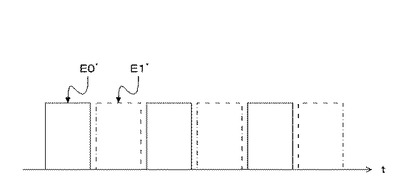
このリレーノードRNがレイヤ3のリレーノードの場合には、基地局eNBから送信されたRF信号E0’と、RF信号E0’を中継してリレーノードRNから出力されるRF信号E1’とは、異なる信号として取り扱われる。このような場合において、RF信号E0’とRF信号E1’とが同一周波数で送信されると、リレーノードRNからの送信信号(RF信号E1’)がリレーノードRNの受信側(RF信号E0’)に回り込み、干渉する可能性がある。そのため、このような場合には、リレーノードRNは、基地局eNBから送信されたRF信号E0’の受信と、移動体通信端末UEに向けたRF信号E1’の送信を時分割で行う。このような場合には、基地局eNBから送信されるRF信号E0’は、サブフレームごとに時分割されて所定のタイミングで移動体通信端末やリレーノードに送信される。リレーノードRNは、このタイミングにあわせて、RF信号E0’を受信し、RF信号E0’の受信とは異なるタイミングでRF信号E1’を移動体通信端末UEに向けて送信する。この、RF信号E0’及びRF信号E1’の双方を受信可能なエリアでは、RF信号E0’とRF信号E1’とが、移動体通信端末UEにむけて、時分割で送信されることになる。図4Aに、このような場合における、RF信号E0’とRF信号E1’との関係の概略を示す。
【0018】
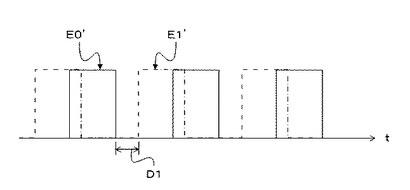
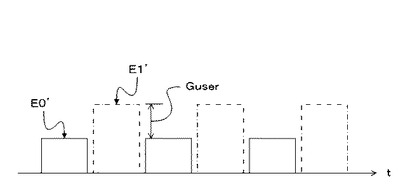
移動体通信端末UEは、理想的には、図4Aに示すようにRF信号E1’とRF信号E0’とを時分割で受信する。しかしながら、基地局eNB、リレーノードRN、及び移動体通信端末UEとの間の位置関係に応じて、これらの信号の減衰や遅延が生じる場合がある。以下では、理解を容易にするために、基地局eNBの信号出力レベルと、リレーノードRNの信号出力レベルとが同じであるものとして説明する。例えば、図4Bは、RF信号E1’に遅延が生じた場合を示している。このような場合には、RF信号E0’とRF信号E1’との間で干渉が生じる。また、距離L0に応じてRF信号E0’が減衰する。例えば、図4Cは、距離L0>L2の場合を示しており、この場合には、RF信号E1’のレベルに対してRF信号E0’のレベルが低くなる。本実施形態に係るリレーノードシミュレーターのダウンリンク処理部10は、このような環境を模擬し、移動体通信端末UEに相当する被試験端末600の動作を試験する。なお、この場合には、eNB500が基地局eNBに相当し、ダウンリンク処理部10が、リレーノードRNのダウンリンク処理部分と、距離L0とL2の距離差に応じた、基地局eNBからの信号とリレーノードRNからの信号とのレベル差及び遅延とを模擬する。具体的には、ダウンリンク処理部10は、eNB500からRF信号E0’を受けて、これを基に、RF信号E0’とRF信号E1’とが加算された試験信号を生成して被試験端末600(即ち、移動体通信端末)に向けて送信する。
【0019】
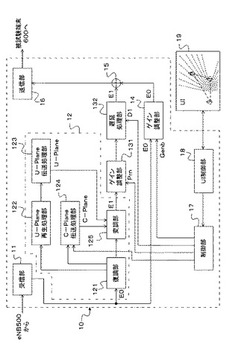
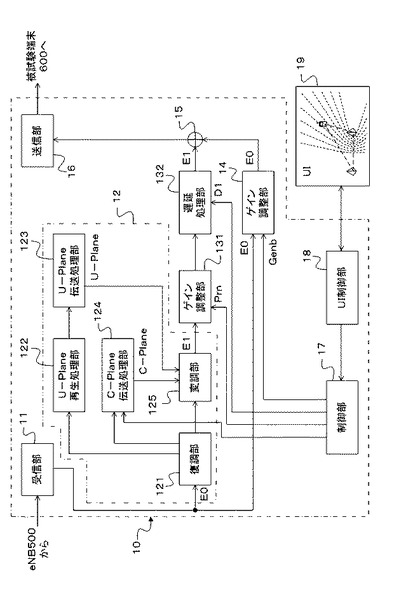
ダウンリンク処理部10の構成について、図2Aを参照しながら説明する。図2Aは、ダウンリンク処理部10の詳細な構成を示したブロック図である。図2Aに示すように、ダウンリンク処理部10は、受信部11と、リレーノード処理部12と、ゲイン調整部131と、遅延処理部132と、ゲイン調整部14と、加算器15と、送信部16と、制御部17と、UI制御部18とを含んで構成されている。リレーノード処理部12は、実際のリレーノードのベースバンド信号処理を模擬する構成となっており、実際のリレーノードが生成すべきベースバンド信号を生成するようになっている。このリレーノードが生成すべきベースバンド信号は、リレーノードが移動体通信端末に向けて送信するRF信号に対応したベースバンド信号である。リレーノード処理部12は、復調部121と、U−Plane再生処理部122と、U−Plane伝送処理部123と、C−Plane伝送処理部124と、変調部125とを含んで構成されている。
【0020】
受信部11は、所定のタイミングに基づきeNB500から時分割で送信されたRF信号E0’を受ける。受信部11は、受けたRF信号をIF(中間周波数)信号に周波数変換し、このIF信号をA/D変換して周波数シフトを行うことでデジタルのベースバンド信号E0を得る。このベースバンド信号E0は、RF信号E0’に対応したベースバンド信号である。受信部11は、このベースバンド信号E0を復調部121及びゲイン調整部14にそれぞれ出力する。
【0021】
復調部121、U−Plane再生処理部122、U−Plane伝送処理部123、C−Plane伝送処理部124、及び変調部125は、模擬されるリレーノードRNの復調・復号処理及び符号・変調処理を行う部分の構成に相当する。そのため、これらの構成は、あらかじめ決められた通信方式の規約(例えば、3GPP TS36.211 V10.0.0)に準拠して動作する。以降では、これらの構成の一例を説明する。
【0022】
復調部121は、受信部11からのベースバンド信号E0を受けて、復調処理を行う。この復調された信号は、所定の通信方式(LTE)に応じた符号化方式(例えば、OFDMA)に基づくフレーム構造を有する。
【0023】
復調部121は、前述した所定の通信方式に基づき復調された信号を復号してデジタルデータを取り出す。復調部121は、取り出されたデジタルデータを、U−Plane再生処理部122に出力する。また、復調部121は、C−Plane伝送処理部124にC−Planeの生成を行うための情報を送出する。また、復調部121は、ベースバンド信号E0の同期タイミングを変調部125に通知する。
【0024】
ここで、復調された信号を復号して取出されたデジタルデータのプロトコル構成について説明する。このデータは、U−Plane(User Plane)プロトコルと、C−Plane(Control Plane)プロトコルとを含んで構成されている。U−Planeプロトコルは、ユーザーデータを取り扱うプロトコルである。以降では、単にU−Planeと呼ぶ。また、C−Planeプロトコルは、制御を行うためのデータを取り扱うプロトコルである。以降では、単にC−Planeと呼ぶ。
【0025】
U−Plane再生処理部122は、復調部121からデジタルデータを受ける。U−Plane再生処理部122は、このデジタルデータのC−Planeに含まれる制御情報に基づき、デジタルデータからU−Planeを再生する。U−Plane再生処理部122は、再生されたU−PlaneをU−Plane伝送処理部123に出力する。
【0026】
U−Plane伝送処理部123は、U−Plane再生処理部122からU−Planeを受ける。U−Plane伝送処理部123は、基地局と同等の無線制御機能を有している。この無線制御機能には、例えば、PDCP(Packet Data Convergence Protocol)サブレイヤ、RLC(Radio Link Control)サブレイヤ、MAC(Medium Access Control)サブレイヤ、RRC(Radio Resource Control)サブレイヤが含まれる。PDCPサブレイヤは、ユーザーデータの秘匿及びヘッダ圧縮等を行う。また、RLCサブレイヤは、ARQ(Automatic Repeat reQuest)による再送制御及びSDU(Service Data Unit)分割、結合及び順序制御等を行う。また、MACサブレイヤは、HARQ及びユーザーデータスケジューリング等を行う。また、RRCサブレイヤは、モビリティ、QoS、セキュリティ制御を行う。U−Plane伝送処理部123は、受けたU−Planeに対してこれらの無線制御を行う。U−Plane伝送処理部123は、無線制御が施されたU−Planeを変調部125に出力する。
【0027】
C−Plane伝送処理部124は、復調部121及び制御部17からの情報を受けて、ダウンリンク処理部10が模擬するリレーノードRNと被試験端末600との間のネットワークを制御するためのデータ、即ち、C−Planeを生成する。この生成されたC−Planeに基づき、例えば、模擬されるリレーノードRNと被試験端末600との間の伝送路の設定や、ハンドオーバーの制御等が行われる。C−Plane伝送処理部124は、生成されたC−Planeを変調部125に出力する。
【0028】
変調部125は、U−Plane伝送処理部123からU−Planeを受ける。また、変調部125は、C−Plane伝送処理部124からC−Planeを受ける。変調部125は、受けたC−Plane及びU−Planeによりデジタルデータを生成する。変調部125は、生成されたデジタルデータを所定の通信方式に基づき符号化及びデジタル変調してベースバンド信号を生成する。また、変調部125は、同期タイミングを復調部121から受ける。変調部125は、生成されたベースバンド信号が、この通知された同期タイミングに同期するように、このベースバンド信号に対して遅延処理を施す。変調部125は、遅延処理が施されたベースバンド信号E1をゲイン調整部131に出力する。
【0029】
ゲイン調整部131は、変調部125から、ベースバンド信号E1を受ける。また、ゲイン調整部131は、測定条件としてあらかじめ設定されたリレーノードから出力される信号のレベルPrnを示す情報を制御部17から受ける。ゲイン調整部131は、ベースバンド信号E1のレベルがレベルPrnとなるようにゲインを決定し、そのゲインでベースバンド信号E1のレベルを調整する。
【0030】
なお、ゲイン調整部131は、実回線で想定されるリレーノードRNと被試験端末600(即ち、移動体通信端末UE)との間におけるベースバンド信号E1の減衰量を算出し、ベースバンド信号E1のレベルを、レベルPrnからこの減衰量分だけ減衰させたレベルとなるようにゲインを調整してもよい。この場合には、ゲイン調整部131は、あらかじめ設定されたリレーノードと被試験端末600との間の距離(例えば、距離L2)を示す情報を制御部17から受けて、この距離を示す情報を基にベースバンド信号の減衰量を算出すればよい。
【0031】
ゲイン調整部131は、レベルが調整されたベースバンド信号E1を遅延処理部132に出力する。
【0032】
遅延処理部132は、レベルが調整されたベースバンド信号E1をゲイン調整部131から受ける。また、遅延処理部132は、制御部17から遅延量D1を示す情報を受ける。遅延処理部132は、ベースバンド信号E1に遅延量D1を与える。なお、後述するように、ベースバンド信号E0とE1は加算されて周波数変換され、試験信号であるRF信号になる。この試験信号には、ベースバンド信号E0が周波数変換されたRF信号E0’と、ベースバンド信号E1が周波数変換されたRF信号E1’とが含まれる。ここで、図4Bに、遅延処理部132により、遅延が与えられたRF信号E1’と、eNB500から送信されたRF信号E0’との関係を示す。このように、遅延処理部132によりRF信号E1’に遅延量D1を施すことにより、基地局eNB、リレーノードRN、及び移動体通信端末UEとの間の位置関係に基づくRF信号E1’の遅延を模擬する。これにより、この遅延による、RF信号E0’とRF信号E1’との間の干渉を模擬することが可能となる。遅延処理部132は、遅延が与えられたベースバンド信号E1を加算器15に出力する。
【0033】
次に、ダウンリンク処理部10の、ベースバンド信号E0の出力に係る構成について説明する。ダウンリンク処理部10は、ベースバンド信号E0のレベルを調整して出力することで、図4Cに示すような、eNB500(即ち、基地局eNB)と被試験端末600(即ち、移動体通信端末UE)との間の距離L0によるRF信号E0’の減衰を模擬する。これらを模擬する構成がゲイン調整部14である。各構成について以下に説明する。なお、本発明のリレーノードシミュレーターは、レベルが制御されたベースバンド信号を周波数変換してRF信号とすることにより、レベルが制御されたRF信号を出力するようになっている。
【0034】
ゲイン調整部14は、受信部11からベースバンド信号E0を受ける。また、ゲイン調整部14は、制御部17からゲインGenbを示す情報を受ける。ゲイン調整部14は、ベースバンド信号E0のレベルを、ゲインGenbで減衰もしくは増幅させることで調整する。これにより、ベースバンド信号E0のレベルが、図4Cに示すようにレベルPenb’に調整される。これにより、基地局eNBと移動体通信端末UEとの間の距離L0に応じたRF信号E0’の減衰を模擬することが可能となる。ゲイン調整部14は、レベルが調整されたベースバンド信号E0を加算器15に出力する。
【0035】
加算器15は、遅延が与えられたベースバンド信号E1を遅延処理部132から受ける。また、加算器15は、レベルが調整されたベースバンド信号E0をゲイン調整部14から受ける。加算器15は、ベースバンド信号E0とベースバンド信号E1とを加算し、加算された信号を送信部16に出力する。送信部16は、加算された信号をD/A変換して周波数変換し、これにより得られたRF信号を試験信号として被試験端末600に向けて送信する。
【0036】
制御部17は、UI19を介して操作者が指定した測定条件やリレーノードRNの設定情報をUI制御部18から受ける。制御部17は、測定条件として指示された、レベルPrn、ゲインGenb、及び遅延量D1を受ける。制御部17は、レベルPrnをゲイン調整部131に出力する。これを受けて、ゲイン調整部131は、ベースバンド信号E1のレベルを調整する。また、制御部17は、遅延量D1を示す情報を遅延処理部132に出力する。これを受けて、遅延処理部132は、ベースバンド信号E1に遅延量D1を与える。また、制御部17は、レベルPrn及びゲインGenbをゲイン調整部14に出力する。これを受けて、ゲイン調整部14は、ベースバンド信号E0のレベルを調整する。
【0037】
制御部17は、UI19を介して操作者から入力されたリレーノードRNの設定情報(例えば、リレーノードRNの識別情報)をUI制御部18から受ける。制御部17は、この設定情報のうち、C−Planeを生成するために必要な情報をC−Plane伝送処理部124に送出する。
【0038】
UI制御部18は、測定条件やリレーノードRNの設定情報を指定するための操作画面をUI19に表示させる。また、UI制御部18は、この操作画面に基づく操作者から指示をUI19から受けて、これらの情報を生成して制御部17に出力する。これにより、制御部17は、ダウンリンク処理部10の各構成の動作を、操作者により指定された測定条件や設定情報に基づき制御することが可能となる。
【0039】
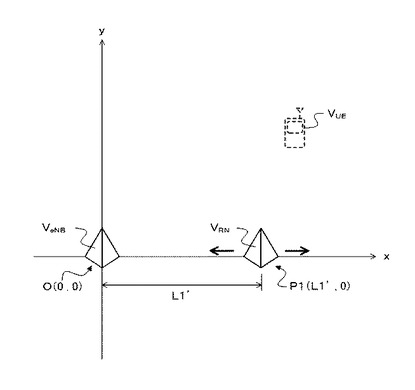
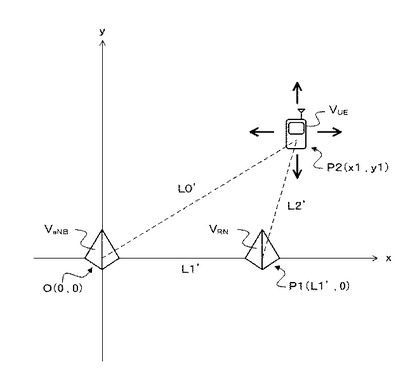
また、UI制御部18は、基地局マーカーVeNBと、リレーノードマーカーVRNと、端末マーカーVUEとを含む操作画面をUI19に表示させる。基地局マーカーVeNBは、基地局eNBを模擬している。また、リレーノードマーカーVRNは、リレーノードRNを模擬している。また、端末マーカーVUEは、移動体通信端末UEを模擬している。UI制御部18は、UI19を介して操作者による基地局マーカーVeNB、リレーノードマーカーVRN、及び端末マーカーVUEの位置の指定を受けて、これらの位置に基づき、遅延量D1、ゲインGenb、及びレベルPrnを決定する。以降では、まず、この操作画面の構成について図5A及び図5Bを参照しながら説明し、その後、この操作画面の生成及び表示に係る詳細な動作について、UI制御部18の詳細な構成とあわせて説明する。図5A及び図5Bは、この操作画面の一例を示しており、この操作画面の操作方法を説明するための図である。
【0040】
(操作画面の構成)
図5A及び図5Bに示すように、遅延及びゲインを指定するための操作画面は、基地局マーカーVeNBと、リレーノードマーカーVRNと、端末マーカーVUEとを含んで構成されている。これらのマーカーは、あらかじめ決められた共通の座標系に対応付けられている。なお、以降は、単に「座標系」と記載した場合には、この共通の座標系を指すものとする。図5A及び図5Bに示した例では、横軸をx軸、縦軸をy軸としている。この操作画面は、これらの各マーカーを前述した座標系上の所望の位置に配置することにより、実環境における基地局eNB、リレーノードRN、及び移動体通信端末UEの位置関係を指定可能に構成されている。
【0041】
まず、図5Aを参照する。この操作画面では、基地局マーカーVeNBは、座標系上の所定の位置(例えば、原点O(0,0))に固定されている。また、リレーノードマーカーVRNは、基地局マーカーVeNBを基点として、所定の方向にのみ(一次元的に)移動可能に構成されている。図5Aの例では、基地局マーカーVeNBは、x方向に沿ってのみ移動可能に構成されている。基地局マーカーVeNBの位置が指定されることにより、座標系上における基地局マーカーVeNBとリレーノードマーカーVRNとの間の距離L1’がUI制御部18に含まれる遅延量算出部183により算出される。この距離L1’を基に、実環境上における基地局eNBとリレーノードRNとの間の距離L1が算出される。遅延量算出部183の構成と、この動作の詳細については後述する。なお、基地局マーカーVeNB及びリレーノードマーカーVRNの相対的な位置をして可能であればよく、例えば、リレーノードマーカーVRNの位置を固定し、基地局マーカーVeNBを一次元的に移動可能に構成してもよい。なお、以降では、基地局マーカーVeNBが固定されているものとして説明する。
【0042】
次に、図5Bを参照する。基地局マーカーVeNB及びリレーノードマーカーVRNの位置が指定されると、端末マーカーVUEが、座標系上において、その位置を指定可能に表示される。このとき、端末マーカーVUEの移動は特に制約されることなく、二次元的に移動可能に表示される。端末マーカーVUEの位置が指定されることにより、座標系上における端末マーカーVUEと基地局マーカーVeNBとの間の距離L0’と、端末マーカーVUEとリレーノードマーカーVRNのとの間の距離L2’とが算出される。この距離L0’を基に、実環境上における移動体通信端末UEと基地局eNBとの間の距離L0が算出される。また、距離L2’を基に、実環境上における移動体通信端末UEとリレーノードRNとの間の距離L2が算出される。
【0043】
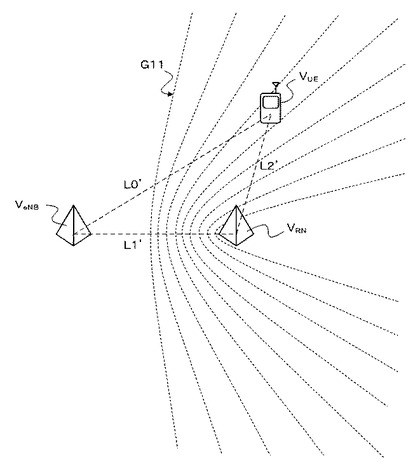
また、本発明に係る操作画面では、基地局マーカーVeNB及びリレーノードマーカーVRNの位置が特定されると、遅延量算出部183が、座標系上の各位置におけるRF信号E0’とRF信号E1’との間の遅延量D1を算出する。その後、パターン表示制御部1822が、これを識別可能に提示したパターンG11を操作画面上に表示させる。パターン表示制御部1822の詳細については後述する。図6Aは、このパターンG11の一例を示している。図6Aでは、算出された各遅延量D1を基に等値線を描画することで、座標系上の各位置に応じた遅延量D1の変化を識別可能に表示している。なお、このパターンG11の生成に係る構成及び動作については、パターン表示制御部1822の構成とあわせて後述する。このパターンG11により、操作者は、端末マーカーVUEの位置を変化させた場合に、各位置における遅延量D1の変化を容易に識別することが可能となる。なお、パターンG11が、「第1のパターン」に相当する。
【0044】
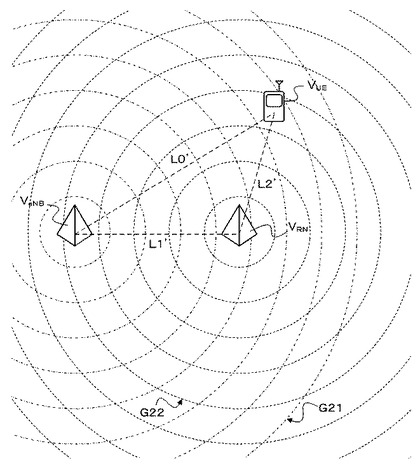
また、座標系上の各位置におけるRF信号E0’及びRF信号E1’の各減衰量を算出し、これを識別可能に提示したパターンG21及びG22を表示させてもよい。図6Bは、このパターンG21及びG22の一例を示している。図6Bでは、算出された各減衰量を基に等値線を描画することで、座標系上の各位置におけるRF信号E0’及びRF信号E1’ の減衰量を識別可能に表示している。なお、このパターンG21及びG22の生成に係る構成及び動作については後述する。このパターンG21及びG22により、操作者は、基地局マーカーVeNB及びリレーノードマーカーVRNの相対的な位置関係に応じて、各位置におけるRF信号E0’及びRF信号E1’ の減衰量の変化を容易に識別することが可能となる。
【0045】
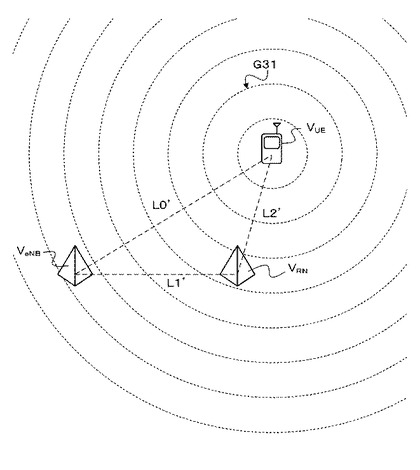
また、端末マーカーVUEの位置指定を受けて、座標系上の各位置における移動体通信端末UEからの信号の減衰量を算出し、これを識別可能に提示したパターンG31を表示させてもよい。図6Cは、このパターンG31の一例を示している。図6Cでは、算出された各減衰量を基に等値線を描画することで、座標系上の各位置における減衰量を識別可能に表示している。このパターンG31により、操作者は、端末マーカーVUEの位置に応じた、各位置における移動体通信端末UEから信号の減衰量の変化を容易に識別することが可能となる。なお、パターンG21、G22、及びG31が、「第2のパターン」に相当する。
【0046】
(UI制御部18の構成)
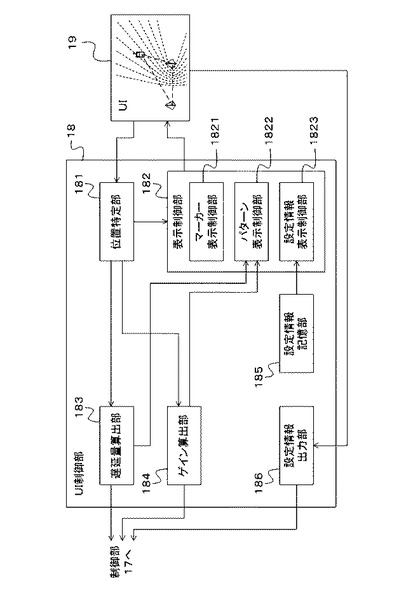
次に、UI制御部18の詳細な構成について図2Bを参照しながら説明する。図2Bは、UI制御部18の構成を示したブロック図である。図2Bに示すように、UI制御部18は、位置特定部181と、表示制御部182と、遅延量算出部183と、ゲイン算出部184と、設定情報記憶部185と、設定情報出力部186とを含んで構成されている。また、表示制御部182は、マーカー表示制御部1821と、パターン表示制御部1822と、設定情報表示制御部1823とを含んで構成されている。
【0047】
位置特定部181は、UI19から、操作者により指定されたリレーノードマーカーVRNの位置を示す情報(以降では、「位置情報」と呼ぶ)を受ける。例えば、図5Aの場合には、位置特定部181は、UI19からリレーノードマーカーVRNの位置を示す座標P1(L1’,0)を位置情報として受ける。位置特定部181は、リレーノードマーカーVRNの位置情報を表示制御部182に出力する。これを受けて、表示制御部182は、操作画面上のリレーノードマーカーVRNの表示位置を更新し、この操作画面をUI19上に表示させる。また、位置特定部181は、基地局マーカーVeNB及びリレーノードマーカーVRNそれぞれの位置情報を遅延量算出部183及びゲイン算出部184に出力する。
【0048】
また、リレーノードマーカーVRNの位置の特定後に、位置特定部181は、UI19から、操作者により指定された端末マーカーVUEの位置を示す情報を受ける。例えば、図5Bの場合には、位置特定部181は、UI19から端末マーカーVUEの位置を示す座標P2(x1,y1)を位置情報として受ける。位置特定部181は、端末マーカーVUEの位置情報を表示制御部182に出力する。これを受けて、表示制御部182は、操作画面上の端末マーカーVUEの表示位置を更新し、この操作画面をUI19上に表示させる。また、位置特定部181は、端末マーカーVUEの位置情報を遅延量算出部183及びゲイン算出部184に出力する。
【0049】
遅延量算出部183は、位置特定部181から、基地局マーカーVeNB及びリレーノードマーカーVRNそれぞれの位置情報を受ける。遅延量算出部183は、これらの位置情報を基に、基地局マーカーVeNBとリレーノードマーカーVRNとの間の距離L1’を算出する。遅延量算出部183は、座標系上の各位置(以降では、「サンプリングポイント」と呼ぶ)に対して、その位置と、基地局マーカーVeNB及びリレーノードマーカーVRNのそれぞれとの間の距離L0’及びL2’を算出する。遅延量算出部183は、算出された距離L1’、L0’、及びL2’を基に、距離L0’と距離L1’+L2’との差Ddiffを算出する。Ddiffは、基地局マーカーVeNBの座標O(0,0)と、リレーノードマーカーVRNの座標P1(L1’,0)と、端末マーカーVUEの座標P2(x1,y1)とに基づき、以下の式1により算出される。なお、差Ddiffを算出するサンプリングポイント間の距離、即ち、分解能は適宜変更しても良い。
[式1]

【0050】
なお、この距離L0’に対応する実環境上の距離L0は、基地局eNBと移動体通信端末UEとの間の距離を示している。また、距離L1’+L2’に対応する実環境上の距離L1+L2は、基地局eNBからリレーノードRNを経由して移動体通信端末UEに至るまでの距離を示している。
【0051】
遅延量算出部183は、サンプリングポイントごとに算出されたDdiffを、あらかじめ決められた、操作画面上の距離と実環境上の距離との間の縮尺を示す情報を基に実環境上の距離に換算する。遅延量算出部183は、算出された距離を信号の伝搬速度cで除算することにより、各サンプリングポイントにおける遅延量D1を算出し、これをそのサンプリングポイントの位置情報と関連付ける。遅延量算出部183は、遅延量D1を示す情報が関連付けられた各サンプリングポイントの位置情報をパターン表示制御部1822に出力する。パターン表示制御部1822については後述する。
【0052】
また、基地局マーカーVeNB及びリレーノードマーカーVRNの位置の特定後に、遅延量算出部183は、位置特定部181から、端末マーカーVUEの位置情報を受ける。遅延量算出部183は、受けた位置情報に対応するサンプリングポイントを特定し、そのサンプリングポイントに関連付けられた遅延量D1を抽出する。遅延量算出部183は、抽出された遅延量D1を制御部17に出力する。これにより、この遅延量D1が、制御部17を介して遅延処理部132に設定される。なお、遅延量算出部183は、端末マーカーVUEの位置情報を受けたときに、式1に基づき、その位置に対応する遅延量D1を算出し、これを制御部17に出力するように動作させてもよい。
【0053】
なお、遅延量算出部183は、端末マーカーVUEの位置情報を受けたときに、基地局マーカーVeNB、リレーノードマーカーVRN、及び端末マーカーVUEの位置情報を基にDdiffを算出し、このDdiffを基に遅延量D1を算出してもよい。このように動作させることで、遅延量D1を、各マーカーの位置情報に基づき厳密に算出することが可能となる。
【0054】
ゲイン算出部184は、位置特定部181から、基地局マーカーVeNB及びリレーノードマーカーVRNそれぞれの位置情報を受ける。ゲイン算出部184は、これらの位置情報を基に、各サンプリングポイントに対して、その位置と、基地局マーカーVeNB及びリレーノードマーカーVRNのそれぞれとの間の距離L0’及びL2’を算出する。
【0055】
ゲイン算出部184は、サンプリングポイントごとに算出された距離L0’及びL2’を、あらかじめ決められた、操作画面上の距離と実環境上の距離との間の縮尺を示す情報を基に実環境上の距離L0及びL2に換算する。ゲイン算出部184は、算出された距離L0を基に、各サンプリングポイントにおけるRF信号E0’の減衰量Genb’を算出する。この減衰量Genb’が、基地局eNBから送信されたRF信号E0’が、距離L0だけ離れたサンプリングポイントに至るまでに減衰する減衰量を示している。また、ゲイン算出部184は、算出された距離L2を基に、各サンプリングポイントにおけるRF信号E1’の減衰量Grn’を算出する。この減衰量Grn’が、リレーノードRNから送信されたRF信号E1’が、距離L2だけ離れたサンプリングポイントに至るまでに減衰する減衰量を示している。ゲイン算出部184は、サンプリングポイントごとに算出された減衰量Genb’及び減衰量Grn’を、そのサンプリングポイントの位置情報に関連付ける。ゲイン算出部184は、減衰量Genb’及び減衰量Grn’が関連付けられた各サンプリングポイントの位置情報をパターン表示制御部1822に出力する。
【0056】
また、基地局マーカーVeNB及びリレーノードマーカーVRNの位置の特定後に、ゲイン算出部184は、位置特定部181から、端末マーカーVUEの位置情報を受ける。ゲイン算出部184は、各サンプリングポイントに対して、その位置と端末マーカーVUEとの間の距離L3’を算出する。ゲイン算出部184は、サンプリングポイントごとに算出された距離L3’を、あらかじめ決められた、操作画面上の距離と実環境上の距離との間の縮尺を示す情報を基に実環境上の距離L3に換算する。ゲイン算出部184は、算出された距離L3を基に、各サンプリングポイントにおける移動体通信端末UEからの信号の減衰量Gue’を算出する。この減衰量Gue’が、移動体通信端末UEから送信された信号が、距離L3だけ離れたサンプリングポイントに至るまでに減衰する減衰量を示している。ゲイン算出部184は、サンプリングポイントごとに算出された減衰量Gue’を、そのサンプリングポイントの位置情報に関連付ける。ゲイン算出部184は、減衰量Gue’が関連付けられた各サンプリングポイントの位置情報をパターン表示制御部1822に出力する。
【0057】
また、ゲイン算出部184は、受けた端末マーカーVUEの位置情報に対応するサンプリングポイントを特定し、そのサンプリングポイントに関連付けられた減衰量Genb’及び減衰量Grn’を抽出する。ゲイン算出部184は、抽出された減衰量Genb’及び減衰量Grn’を、ゲインGenb及びレベルGrnとして制御部17に出力する。これにより、このゲインGenb及びレベルGrnが、制御部17を介してゲイン調整部131及び14に設定される。
【0058】
表示制御部182は、位置特定部181から、リレーノードマーカーVRNの位置情報を受ける。表示制御部182は、この位置情報をマーカー表示制御部1821に出力し、操作画面上のリレーノードマーカーVRNの位置を更新させる。
【0059】
また、表示制御部182は、位置特定部181から、端末マーカーVUEの位置情報を受ける。表示制御部182は、この位置情報をマーカー表示制御部1821に出力し、操作画面上の端末マーカーVUEの位置を更新させる。
【0060】
マーカー表示制御部1821は、UI19から操作画面の表示指示を受けると、まず、図5Aに示した、リレーノードマーカーVRNの位置を指定するための操作画面を生成する。具体的には、マーカー表示制御部1821は、座標系上の所定の位置に基地局マーカーVeNBを固定し、基地局マーカーVeNBを基準として、リレーノードマーカーVRNを一次元的に移動可能に構成された操作画面を生成する。表示制御部182は、マーカー表示制御部1821が生成したこの操作画面をUI19に出力する。これにより、操作者は、図5Aに示すような操作画面を操作しながら、リレーノードマーカーVRNの位置を指定することが可能となる。
【0061】
次に、マーカー表示制御部1821は、表示制御部182からリレーノードマーカーVRNの位置情報を受ける。マーカー表示制御部1821は、この位置情報に基づき、操作画面上におけるリレーノードマーカーVRNの表示位置を更新する。また、マーカー表示制御部1821は、操作者の指示に基づき、リレーノードマーカーVRNの位置が特定されると、図5Bに示した、端末マーカーVUEの位置を指定するための操作画面を生成する。具体的には、マーカー表示制御部1821は、基地局マーカーVeNB及びリレーノードマーカーVRNに対して、端末マーカーVUEが二次元的に移動可能に構成された操作画面を生成する。表示制御部182は、マーカー表示制御部1821が生成したこの操作画面をUI19に出力する。これにより、操作者は、図5Bに示すような操作画面を操作しながら、端末マーカーVUEの位置を指定することが可能となる。
【0062】
また、マーカー表示制御部1821は、端末マーカーVUEの位置情報を受ける。マーカー表示制御部1821は、この位置情報に基づき、操作画面上における端末マーカーVUEの表示位置を更新する。
【0063】
パターン表示制御部1822は、基地局マーカーVeNB及びリレーノードマーカーVRNの位置の特定後に、遅延量算出部183から、遅延量D1を示す情報が関連付けられた各サンプリングポイントの位置情報を受ける。パターン表示制御部1822は、受けた各サンプリングポイントの位置情報を、座標系上の位置と対応付ける。これにより、座標系上の位置に対応するサンプリングポイントの位置情報に関連付けられた遅延量D1が、その座標系上の位置に関連付けられる。パターン表示制御部1822は、座標系上の各位置に関連付けられた遅延量D1を識別可能に表示させたパターンG11を生成する。図6Aは、このパターンG11の一例を示している。具体的には、パターン表示制御部1822は、遅延量D1の値が略同一のサンプリングポイントを特定し、それらを結んだ曲線を生成する。パターン表示制御部1822は、この曲線の生成に係る処理を、遅延量D1の値を所定の範囲で変化させながら、その値ごとに実行する。これにより、図6Aに示すようなパターンG11(即ち、等値線)が生成される。
【0064】
表示制御部182は、パターン表示制御部1822が生成したパターンG11を、マーカー表示制御部1821が生成した図5Bに示す操作画面に重畳表示させる。これにより、操作者は、端末マーカーVUEの位置を変化させた場合に、各位置における遅延量D1の変化を容易に識別することが可能となる。したがって、操作者は、端末マーカーVUEを所望する遅延量D1を示す位置に設定することで、試験を実行するための遅延量D1を選択的に容易に設定することが可能となる。
【0065】
また、パターン表示制御部1822は、基地局マーカーVeNB及びリレーノードマーカーVRNの位置の特定後に、ゲイン算出部184から、減衰量Genb’及び減衰量Grn’が関連付けられた各サンプリングポイントの位置情報を受ける。パターン表示制御部1822は、受けた各サンプリングポイントの位置情報を、座標系上の位置と対応付ける。これにより、座標系上の位置に対応するサンプリングポイントの位置情報に関連付けられた減衰量Genb’及び減衰量Grn’が、その座標系上の位置に関連付けられる。パターン表示制御部1822は、座標系上の各位置に関連付けられた減衰量Genb’及び減衰量Grn’を識別可能に表示させたパターンG21及びG22を生成する。図6Bは、このパターンG21及びG22の一例を示している。例えば、パターンG21を生成する場合には、パターン表示制御部1822は、減衰量Genb’の値が略同一のサンプリングポイントを特定し、それらを結んだ曲線を生成する。パターン表示制御部1822は、この曲線の生成に係る処理を、減衰量Genb’の値を所定の範囲で変化させながら、その値ごとに実行する。これにより、図6Bに示すようなパターンG21(等値線)が生成される。同様に、パターンG22の場合には、パターン表示制御部1822は、減衰量Grn’の値を基にパターンG22を形成する各曲線を生成する。なお、減衰量Genb’及び減衰量Grn’は、対応する機器(基地局eNB及びリレーノードマーカーRN)から遠くなるにつれてその値は増加する。そのため、図6Bに示すように、パターンG21及びG22それぞれを形成する各曲線は、対応するマーカーを中心とした同心円となる。
【0066】
表示制御部182は、パターン表示制御部1822が生成したパターンG21及びG22を、マーカー表示制御部1821が生成した図5Bに示す操作画面に重畳表示させる。これにより、操作者は、基地局マーカーVeNB及びリレーノードマーカーVRNの相対的な位置関係に応じて、各位置におけるRF信号E0’及びRF信号E1’ の減衰量の変化を容易に識別することが可能となる。したがって、操作者は、端末マーカーVUEを所望する減衰量Genb’及び減衰量Grn’を示す位置に設定することで、試験を実行するための減衰量Genb’及び減衰量Grn’を選択的に容易に設定することが可能となる。
【0067】
また、パターン表示制御部1822は、端末マーカーVUEの位置の特定後に、ゲイン算出部184から、減衰量Gue’が関連付けられた各サンプリングポイントの位置情報を受ける。パターン表示制御部1822は、受けた各サンプリングポイントの位置情報を、座標系上の位置と対応付ける。これにより、座標系上の位置に対応するサンプリングポイントの位置情報に関連付けられた減衰量Gue’が、その座標系上の位置に関連付けられる。パターン表示制御部1822は、座標系上の各位置に関連付けられた減衰量Gue’を識別可能に表示させたパターンG31を生成する。図6Cは、このパターンG31の一例を示している。具体的には、パターン表示制御部1822は、減衰量Gue’の値が略同一のサンプリングポイントを特定し、それらを結んだ曲線を生成する。パターン表示制御部1822は、この曲線の生成に係る処理を、減衰量Gue’の値を所定の範囲で変化させながら、その値ごとに実行する。これにより、図6Cに示すようなパターンG31(即ち、等値線)が生成される。なお、減衰量Gue’は、移動体通信端末UEから遠くなるにつれてその値は増加する。そのため、図6Cに示すように、パターンG31を形成する各曲線は、端末マーカーVUEを中心とした同心円となる。
【0068】
表示制御部182は、パターン表示制御部1822が生成したパターンG31を、マーカー表示制御部1821が生成した図5Bに示す操作画面に重畳表示させる。これにより、操作者は、端末マーカーVUEの位置に応じた、各位置における移動体通信端末UEから信号の減衰量の変化を容易に識別することが可能となる。
【0069】
なお、パターンG11、G21、G22、及びG31は、等値線に限らず、例えば、算出された値(遅延量または減衰量)を所定の色と関連付けて、その値に応じて座標系上の各領域を色分けして表示(例えば、グラデーション表示)させてもよい。
【0070】
また、パターンG11、G21、G22、及びG31は、それぞれを切り替えながら表示可能に構成してもよいし、これらのうちの一部または全部を重畳表示させてもよい。
【0071】
また、パターンG11、G21、G22、及びG31は、座標系上の位置と、算出された値(即ち、遅延量または減衰量の値)とが、必ずしも厳密に1対1で対応している必要は無い。例えば、座標系上を大まかに複数の領域に分割し、各領域に対して、その領域に含まれる位置のいずれかに対応する値を割当ててもよい。また、図6A〜図6Cにおいて曲線で提示された各パターンを、例えば、各曲線の一部もしくは全部を近似した直線により描画してもよい。これらのような場合には、指定された位置に基づく値(遅延量または減衰量の値)を試験に用いるように動作させてもよいし、その位置が含まれる領域に関連付けられた値を用いるように動作させてもよい。
【0072】
また、上記では、サンプリングポイントごとに遅延量または減衰量を算出していたが、これに替えて、各マーカーの位置を変数として各パターン(例えば、パターンG11、G21、G22、及びG31)を生成してもよい。例えば、遅延量の場合には、差Ddiffを変化させながら式1をx1及びy1の式に展開することで、パターンG11(等値線)を形成する遅延量ごとの各曲線を表す関数として導出することが可能である。また、減衰量の場合には、各マーカーからの距離と減衰量との関係に基づき、そのマーカーを中心とした円を表す関数を、減衰量ごとに導出することが可能である。このとき、減衰量ごとの各円は、前述したとおり、対応するマーカーを中心とした同心円となる。
【0073】
設定情報表示制御部1823は、リレーノードRNの設定情報を指定するための操作画面を生成するための構成である。この設定情報には、例えば、リレーノードRNの識別情報や、C−Planeを生成するために必要な情報等が含まれる。この設定情報を指定するためのテンプレートや選択肢等の情報は、あらかじめ生成されて設定情報記憶部185に記憶されている。設定情報表示制御部1823は、設定情報記憶部185に記憶された情報に基づき、設定情報を指定するための操作画面を生成する。表示制御部182は、設定情報表示制御部1823が生成したこの操作画面をUI19に出力する。これにより、操作者は、この操作画面に基づきリレーノードRNの設定情報を指定することが可能となる。この操作画面に基づき、操作者により設定されたリレーノードRNの設定情報を、UI19は、設定情報出力部186に出力する。
【0074】
設定情報出力部186は、UI19を介して操作者が指定したリレーノードRNの設定情報を受ける。設定情報出力部186は、この設定情報を制御部17に出力する。これにより、例えば、C−Planeを生成するために必要な情報が、制御部17からC−Plane伝送処理部124に送出される。
【0075】
UI19は、操作者がリレーノードシミュレーター1を操作するためのUser Interfaceである。UI19は表示部を備えており、表示制御部182から、測定条件やリレーノードRNの設定情報を指定するための操作画面を受けて、これを表示部に表示させる。また、UI19は、操作部を備えている。UI19は、この操作部を介して、操作者により指定されたリレーノードマーカーVRN及び端末マーカーVUEの位置を示す情報を受け、これを位置特定部181に出力する。また、UI19は、操作部を介して、操作者から入力されたリレーノードRNの設定情報を受け、これを設定情報出力部186に出力する。
【0076】
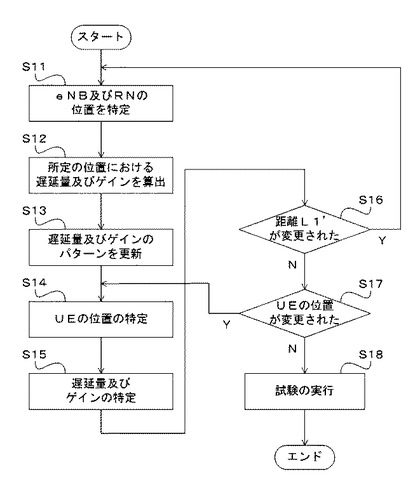
次に、図7を参照しながら、UI制御部18の一連の動作について、操作画面の表示と、その操作画面に基づき遅延量D1、ゲインGenb、及びレベルGrnが制御部17に出力されるまでの動作に着目して説明する。図7は、UI制御部18の一連の動作を示したフローチャートである。
【0077】
(ステップS11)
マーカー表示制御部1821は、UI19から操作画面の表示指示を受けると、まず、図5Aに示した、リレーノードマーカーVRNの位置を指定するための操作画面を生成する。具体的には、マーカー表示制御部1821は、座標系上の所定の位置に基地局マーカーVeNBを固定し、基地局マーカーVeNBを基準として、リレーノードマーカーVRNを一次元的に移動可能に構成された操作画面を生成する。表示制御部182は、マーカー表示制御部1821が生成したこの操作画面をUI19に出力する。これにより、操作者は、図5Aに示すような操作画面を操作しながら、リレーノードマーカーVRNの位置を指定することが可能となる。
【0078】
位置特定部181は、UI19から、操作者により指定されたリレーノードマーカーVRNの位置情報を受ける。位置特定部181は、リレーノードマーカーVRNの位置情報を表示制御部182に出力する。これを受けて、表示制御部182は、操作画面上のリレーノードマーカーVRNの表示位置を更新し、この操作画面をUI19上に表示させる。また、位置特定部181は、基地局マーカーVeNB及びリレーノードマーカーVRNそれぞれの位置情報を遅延量算出部183及びゲイン算出部184に出力する。
【0079】
(ステップS12)
遅延量算出部183は、位置特定部181から、基地局マーカーVeNB及びリレーノードマーカーVRNそれぞれの位置情報を受ける。遅延量算出部183は、これらの位置情報を基に、基地局マーカーVeNBとリレーノードマーカーVRNとの間の距離L1’を算出する。遅延量算出部183は、座標系上の各サンプリングポイントに対して、その位置と、基地局マーカーVeNB及びリレーノードマーカーVRNのそれぞれとの間の距離L0’及びL2’を算出する。遅延量算出部183は、算出された距離L1’、L0’、及びL2’を式1に適用して、距離L0’と距離L1’+L2’との差Ddiffを算出する
【0080】
遅延量算出部183は、サンプリングポイントごとに算出されたDdiffを、あらかじめ決められた、操作画面上の距離と実環境上の距離との間の縮尺を示す情報を基に実環境上の距離に換算する。遅延量算出部183は、算出された距離を信号の伝搬速度cで除算することにより、各サンプリングポイントにおける遅延量D1を算出し、これをそのサンプリングポイントの位置情報と関連付ける。遅延量算出部183は、遅延量D1を示す情報が関連付けられた各サンプリングポイントの位置情報をパターン表示制御部1822に出力する。
【0081】
また、ゲイン算出部184は、位置特定部181から、基地局マーカーVeNB及びリレーノードマーカーVRNそれぞれの位置情報を受ける。ゲイン算出部184は、これらの位置情報を基に、各サンプリングポイントに対して、その位置と、基地局マーカーVeNB及びリレーノードマーカーVRNのそれぞれとの間の距離L0’及びL2’を算出する。
【0082】
ゲイン算出部184は、サンプリングポイントごとに算出された距離L0’及びL2’を、あらかじめ決められた、操作画面上の距離と実環境上の距離との間の縮尺を示す情報を基に実環境上の距離L0及びL2に換算する。ゲイン算出部184は、算出された距離L0を基に、各サンプリングポイントにおけるRF信号E0’の減衰量Genb’を算出する。また、ゲイン算出部184は、算出された距離L2を基に、各サンプリングポイントにおけるRF信号E1’の減衰量Grn’を算出する。ゲイン算出部184は、サンプリングポイントごとに算出された減衰量Genb’及び減衰量Grn’を、そのサンプリングポイントの位置情報に関連付ける。ゲイン算出部184は、減衰量Genb’及び減衰量Grn’が関連付けられた各サンプリングポイントの位置情報をパターン表示制御部1822に出力する。
【0083】
(ステップS13)
マーカー表示制御部1821は、操作者の指示に基づき、リレーノードマーカーVRNの位置が特定されると、図5Bに示した、端末マーカーVUEの位置を指定するための操作画面を生成する。具体的には、マーカー表示制御部1821は、基地局マーカーVeNB及びリレーノードマーカーVRNに対して、端末マーカーVUEが二次元的に移動可能に構成された操作画面を生成する。表示制御部182は、マーカー表示制御部1821が生成したこの操作画面をUI19に出力する。
【0084】
パターン表示制御部1822は、基地局マーカーVeNB及びリレーノードマーカーVRNの位置の特定後に、遅延量算出部183から、遅延量D1を示す情報が関連付けられた各サンプリングポイントの位置情報を受ける。パターン表示制御部1822は、受けた各サンプリングポイントの位置情報を、座標系上の位置と対応付ける。これにより、座標系上の位置に対応するサンプリングポイントの位置情報に関連付けられた遅延量D1が、その座標系上の位置に関連付けられる。パターン表示制御部1822は、座標系上の各位置に関連付けられた遅延量D1を識別可能に表示させたパターンG11を生成する。図6Aは、このパターンG11の一例を示している。具体的には、パターン表示制御部1822は、遅延量D1の値が略同一のサンプリングポイントを特定し、それらを結んだ曲線を生成する。パターン表示制御部1822は、この曲線の生成に係る処理を、遅延量D1の値を所定の範囲で変化させながら、その値ごとに実行する。これにより、図6Aに示すようなパターンG11(即ち、等値線)が生成される。
【0085】
表示制御部182は、パターン表示制御部1822が生成したパターンG11を、マーカー表示制御部1821が生成した図5Bに示す操作画面に重畳表示させる。
【0086】
また、パターン表示制御部1822は、基地局マーカーVeNB及びリレーノードマーカーVRNの位置の特定後に、ゲイン算出部184から、減衰量Genb’及び減衰量Grn’が関連付けられた各サンプリングポイントの位置情報を受ける。パターン表示制御部1822は、受けた各サンプリングポイントの位置情報を、座標系上の位置と対応付ける。これにより、座標系上の位置に対応するサンプリングポイントの位置情報に関連付けられた減衰量Genb’及び減衰量Grn’が、その座標系上の位置に関連付けられる。パターン表示制御部1822は、座標系上の各位置に関連付けられた減衰量Genb’及び減衰量Grn’を識別可能に表示させたパターンG21及びG22を生成する。図6Bは、このパターンG21及びG22の一例を示している。例えば、パターンG21を生成する場合には、パターン表示制御部1822は、減衰量Genb’の値が略同一のサンプリングポイントを特定し、それらを結んだ曲線を生成する。パターン表示制御部1822は、この曲線の生成に係る処理を、減衰量Genb’の値を所定の範囲で変化させながら、その値ごとに実行する。これにより、図6Bに示すようなパターンG21(等値線)が生成される。同様に、パターンG22の場合には、パターン表示制御部1822は、減衰量Grn’の値を基にパターンG22を形成する各曲線を生成する。なお、減衰量Genb’及び減衰量Grn’は、対応する機器(基地局eNB及びリレーノードマーカーRN)から遠くなるにつれてその値は増加する。そのため、図6Bに示すように、パターンG21及びG22それぞれを形成する各曲線は、対応するマーカーを中心とした同心円となる。
【0087】
表示制御部182は、パターン表示制御部1822が生成したパターンG21及びG22を、マーカー表示制御部1821が生成した図5Bに示す操作画面に重畳表示させる。
【0088】
(ステップS14)
リレーノードマーカーVRNの位置の特定後に、位置特定部181は、UI19から、操作者により指定された端末マーカーVUEの位置を示す情報を受ける。例えば、図5Bの場合には、位置特定部181は、UI19から端末マーカーVUEの位置を示す座標P2(x1,y1)を位置情報として受ける。位置特定部181は、端末マーカーVUEの位置情報を表示制御部182に出力する。これを受けて、表示制御部182は、操作画面上の端末マーカーVUEの表示位置を更新し、この操作画面をUI19上に表示させる。また、位置特定部181は、端末マーカーVUEの位置情報を遅延量算出部183及びゲイン算出部184に出力する。
【0089】
(ステップS15)
遅延量算出部183は、位置特定部181から、端末マーカーVUEの位置情報を受ける。遅延量算出部183は、受けた位置情報に対応するサンプリングポイントを特定し、そのサンプリングポイントに関連付けられた遅延量D1を抽出する。
【0090】
また、基地局マーカーVeNB及びリレーノードマーカーVRNの位置の特定後に、ゲイン算出部184は、位置特定部181から、端末マーカーVUEの位置情報を受ける。ゲイン算出部184は、各サンプリングポイントに対して、その位置と端末マーカーVUEとの間の距離L3’を算出する。ゲイン算出部184は、サンプリングポイントごとに算出された距離L3’を、あらかじめ決められた、操作画面上の距離と実環境上の距離との間の縮尺を示す情報を基に実環境上の距離L3に換算する。ゲイン算出部184は、算出された距離L3を基に、各サンプリングポイントにおける移動体通信端末UEからの信号の減衰量Gue’を算出する。ゲイン算出部184は、サンプリングポイントごとに算出された減衰量Gue’を、そのサンプリングポイントの位置情報に関連付ける。ゲイン算出部184は、減衰量Gue’が関連付けられた各サンプリングポイントの位置情報をパターン表示制御部1822に出力する。
【0091】
パターン表示制御部1822は、端末マーカーVUEの位置の特定後に、ゲイン算出部184から、減衰量Gue’が関連付けられた各サンプリングポイントの位置情報を受ける。パターン表示制御部1822は、受けた各サンプリングポイントの位置情報を、座標系上の位置と対応付ける。これにより、座標系上の位置に対応するサンプリングポイントの位置情報に関連付けられた減衰量Gue’が、その座標系上の位置に関連付けられる。パターン表示制御部1822は、座標系上の各位置に関連付けられた減衰量Gue’を識別可能に表示させたパターンG31を生成する。図6Cは、このパターンG31の一例を示している。具体的には、パターン表示制御部1822は、減衰量Gue’の値が略同一のサンプリングポイントを特定し、それらを結んだ曲線を生成する。パターン表示制御部1822は、この曲線の生成に係る処理を、減衰量Gue’の値を所定の範囲で変化させながら、その値ごとに実行する。これにより、図6Cに示すようなパターンG31(即ち、等値線)が生成される。なお、減衰量Gue’は、移動体通信端末UEから遠くなるにつれてその値は増加する。そのため、図6Cに示すように、パターンG31を形成する各曲線は、端末マーカーVUEを中心とした同心円となる。
【0092】
表示制御部182は、パターン表示制御部1822が生成したパターンG31を、マーカー表示制御部1821が生成した図5Bに示す操作画面に重畳表示させる。
【0093】
また、ゲイン算出部184は、受けた端末マーカーVUEの位置情報に対応するサンプリングポイントを特定し、そのサンプリングポイントに関連付けられた減衰量Genb’及び減衰量Grn’を抽出する。
【0094】
(ステップS16)
なお、UI19を介して、操作者により、リレーノードマーカーVRNの位置の位置が変更された場合には(ステップS16、Y)、ステップS11以降の一連の処理が再度実行される。
【0095】
(ステップS17)
また、UI19を介して、操作者により、端末マーカーVUEの位置が変更された場合には(ステップS17、Y)、ステップS14以降の一連の処理が再度実行される。
【0096】
(ステップS18)
リレーノードマーカーVRN及び端末マーカーVUEの位置の位置が特定された場合には(ステップS16、N、かつ、ステップS17、N)、遅延量算出部183は、抽出された遅延量D1を制御部17に出力する。これにより、この遅延量D1が、制御部17を介して遅延処理部132に設定される。なお、遅延量算出部183は、端末マーカーVUEの位置情報を受けたときに、式1に基づき、その位置に対応する遅延量D1を算出し、これを制御部17に出力するように動作させてもよい。また、ゲイン算出部184は、抽出された減衰量Genb’及び減衰量Grn’を、ゲインGenb及びレベルGrnとして制御部17に出力する。これにより、このゲインGenb及びレベルGrnが、制御部17を介してゲイン調整部131及び14に設定される。以降は、これらの設定値に基づき試験が実行される。
【0097】
以上、本実施形態に係るリレーノードシミュレーター1は、基地局マーカーVeNB及びリレーノードマーカーVRNの位置に基づき、端末マーカーVUEの位置を変化させた場合における遅延量D1、ゲインGenb、及びレベルGrnを算出する。このリレーノードシミュレーター1は、これらの値が識別可能に提示されたパターンG11、G21、及びG22(またはG31)を操作画面上に表示させる。これにより、操作者は、端末マーカーVUEの位置を変化させた場合に、各位置における遅延量D1、ゲインGenb、及びレベルGrnの変化を容易に確認することが可能となる。
【0098】
また、このリレーノードシミュレーター1は、パターンG11、G21、及びG22(またはG31)に基づき指定された端末マーカーVUEの位置情報を受けて、試験に用いる遅延量D1、ゲインGenb、及びレベルGrnを決定する。これにより、操作者は、基地局マーカーVeNB、リレーノードマーカーVRN、及び端末マーカーVUEの位置関係を決めるだけで、この位置関係に応じた試験信号をこのリレーノードシミュレーター1で生成させることが可能となる。
【0099】
なお、本実施形態では、リレーノードRNからの信号と、基地局eNBからの信号とが時分割多重される構成を例として説明したが、前述のように、時分割多重を行わずに、基地局から継続して信号を出力し、基地局からの信号とリレーノードからの信号とに対してリソースエレメントの割当てを制御することで、これらの信号の干渉を防止する構成に対しても、本発明は適用できる。
【0100】
また、本実施形態では、eNB500からのRF信号E0’を受信部11で受けて、ベースバンド信号に変換する構成としていたが、受信部11を省略して、RF信号E0’に変換される前のベースバンド信号E0を直接受ける構成としてもよい。この場合には、例えばeNB500の代わりに、ベースバンド信号E0を出力可能な疑似基地局装置を本発明のリレーノードシミュレーターに接続することで、被試験端末に対して同様の試験を行うことが可能である。ここで、RF信号E0’に変換される前のベースバンド信号E0は、RF信号E0’に対応するベースバンド信号である。
【符号の説明】
【0101】
1 リレーノードシミュレーター
10 ダウンリンク処理部
11 受信部
12 リレーノード処理部
121 復調部
122 U−Plane再生処理部
123 U−Plane伝送処理部
124 C−Plane伝送処理部
125 変調部
131 ゲイン調整部
132 遅延処理部
14 ゲイン調整部
15 加算器
16 送信部
17 制御部
18 UI制御部
181 位置特定部
182 表示制御部
1821 マーカー表示制御部
1822 パターン表示制御部
1823 設定情報表示制御部
183 遅延量算出部
184 ゲイン算出部
185 設定情報記憶部
186 設定情報出力部
19 UI
20 アップリンク処理部
31 方向性結合器
32 方向性結合器
500 eNB
600 被試験端末
【技術分野】
【0001】
本発明は、基地局と移動体通信端末との間の通信を中継するリレーノードを模擬するための、リレーノードシミュレーターの技術に関する。
【背景技術】
【0002】
次世代移動通信システムの無線アクセス方式として、LTE(Long Term Evolution)を更に発展させたLTE−Advancedの標準化が、3GPPにより進められている。LTE−Advancedでは、レイヤ3レベルで基地局と移動体通信端末との間の無線信号を再生中継するリレー技術が検討されている。このようなリレー技術が用いられたリレーノードを適用することで、交換局及び無線基地局等の移動通信システムを構成する装置間を有線で接続するための有線バックホール回線の確保が困難な場所等における、効率的なカバレッジの拡大が期待されている(特許文献1)。
【0003】
このようなリレーノードでは、基地局とリレーノードとの間の無線バックホール回線と、リレーノードと移動体通信端末との間の無線アクセス回線とを、同一周波数で運用する場合がある。このような場合には、これらの回線間で十分なアイソレーションが確保されていない場合には、送信信号がリレーノードの受信部に回り込み、干渉を引き起こす。そのため、同一周波数で運用する場合には、無線バックホール回線及び無線アクセス回線の無線リソースを時分割多重(TDM:Time Division Multiplexing)し、リレーノードにおいて送受信が同時に行われないように制御される。なお、前述の構成の他に、基地局から継続して信号を出力し、基地局からの信号とリレーノードからの信号とに対してリソースエレメントの割当てを制御することで、これらの信号の干渉を防止する構成も検討されているが、このような構成にも対しても、本発明は適用できる。以降では、前述の時分割多重の構成を例として説明する。
【0004】
しかしながら、基地局、リレーノード、及び移動体通信端末の位置関係によっては、各信号のレベルが変動したり、いずれかの信号に遅延が生じる場合がある。例えば、基地局から送信された信号のレベルは、移動体通信端末により受信されるまでに、基地局と移動体通信との間の距離に応じて減衰する。同様に、リレーノードから送信された信号のレベルは、移動体通信端末により受信されるまでに、リレーノードと移動体通信との間の距離に応じて減衰する。また、いずれかの信号に遅延が生じた場合には、これらの信号間で干渉が生じる場合がある。そのため、このような信号のレベルの変動や遅延が生じた場合を想定して、被試験端末である移動体通信端末の動作を検証する必要があり、このような環境を模擬するシミュレーターが求められている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2011−82678号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
この発明は、基地局、リレーノード、及び被試験端末の位置関係と、その位置関係に応じた遅延量または減衰量を確認可能に表示画面上に表示させ、それらの値を容易に設定可能なリレーノードシミュレーターを提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するために、請求項1に記載の発明は、基地局からの第1のRF信号を中継して第2のRF信号として移動体通信端末へ送信するリレーノードを模擬し、前記第1のRF信号と前記第2のRF信号とが多重された信号を模擬した試験信号を試験対象の移動体通信端末に送信するリレーノードシミュレーターであって、前記基地局に相当する基地局マーカー(VeNB)と、前記リレーノードに相当するリレーノードマーカー(VRN)と、前記移動体通信端末に相当する端末マーカー(VUE)とを所定の座標系に対応付けて、操作画面上に相対的に移動可能に表示させるマーカー表示制御部(1821)と、前記座標系における、前記基地局マーカー、前記リレーノードマーカー、及び前記端末マーカーのそれぞれの位置を特定する位置特定部(181)と、特定された前記基地局マーカーの位置と前記リレーノードマーカーの位置とに対して、前記端末マーカーの位置を変数として、前記移動体通信端末に到達するまでの前記第2のRF信号の遅延量を算出する遅延量算出部(183)と、算出された前記遅延量に基づき、前記端末マーカーの位置に応じた前記遅延量の大きさを識別可能なパターン(G11)として前記操作画面上に表示させるパターン表示制御部(1822)と、を備え、前記パターン上で前記端末マーカーの位置が指定されたときに、前記第1のRF信号と当該指定位置に対応する前記遅延量が与えられた前記第2の信号とが多重された信号を模擬した前記試験信号を送信することを特徴とするリレーノードシミュレーター(1)である。
また、請求項2に記載の発明は、請求項1に記載のリレーノードシミュレーターであって、前記遅延量算出部は、前記座標系における、前記基地局マーカーと前記リレーノードマーカーとの間の距離に基づき前記遅延量を算出することを特徴とする。
また、請求項3に記載の発明は、請求項1または請求項2に記載のリレーノードシミュレーターであって、前記パターン表示制御部は、前記パターンとして、算出された前記遅延量が略同一の前記位置を結んだ曲線を、前記遅延量ごとに前記操作画面上に表示させることを特徴とする。
また、請求項4に記載の発明は、基地局からの第1のRF信号を中継して第2のRF信号として移動体通信端末へ送信するリレーノードを模擬し、前記第1のRF信号と前記第2のRF信号とが多重された信号を模擬した試験信号を試験対象の移動体通信端末に送信するリレーノードシミュレーターであって、前記基地局に相当する基地局マーカー(VeNB)と、前記リレーノードに相当するリレーノードマーカー(VRN)と、前記移動体通信端末に相当する端末マーカー(VUE)とを所定の座標系に対応付けて、操作画面上に相対的に移動可能に表示させるマーカー表示制御部(1821)と、前記座標系における、前記基地局マーカー、前記リレーノードマーカー、及び前記端末マーカーのそれぞれの位置を特定する位置特定部(181)と、前記基地局と前記リレーノードとのそれぞれの機器からの信号について、対応するマーカーからの前記座標系における距離に応じた減衰量を算出するゲイン算出部(184)と、算出された前記減衰量を基に、前記座標系の各位置における前記それぞれの機器からの信号の前記減衰量の大きさを識別可能なパターン(G21、G22)として前記操作画面上に表示させるパターン表示制御部(1822)と、を備え、前記パターン上で前記基地局マーカー、前記リレーノードマーカー、及び前記端末マーカーのそれぞれの位置が特定されたときに、当該特定位置に対応する前記基地局からの前記減衰量が与えられた前記第1のRF信号と当該特定位置に対応する前記リレーノードからの前記減衰量が与えられた前記第2のRF信号とが多重された信号を模擬した前記試験信号を送信することを特徴とするリレーノードシミュレーター(1)である。
また、請求項5に記載の発明は、基地局からの第1のRF信号を中継して第2のRF信号として移動体通信端末へ送信するリレーノードを模擬し、前記第1のRF信号と前記第2のRF信号とが多重された信号を模擬した試験信号を試験対象の移動体通信端末に送信するリレーノードシミュレーターであって、前記基地局に相当する基地局マーカー(VeNB)と、前記リレーノードに相当するリレーノードマーカー(VRN)と、前記移動体通信端末に相当する端末マーカー(VUE)とを所定の座標系に対応付けて、操作画面上に相対的に移動可能に表示させるマーカー表示制御部(1821)と、前記座標系における、前記基地局マーカー、前記リレーノードマーカー、及び前記端末マーカーのそれぞれの位置を特定する位置特定部(181)と、前記移動体通信端末が受信する信号について、前記端末マーカーからの前記座標系における距離に応じた減衰量を算出するゲイン算出部(184)と、算出された前記減衰量を基に、前記座標系の各位置における前記減衰量の大きさを識別可能なパターン(G31)として前記操作画面上に表示させるパターン表示制御部(182)と、を備え、前記パターン上で前記基地局マーカー、前記リレーノードマーカー、及び前記端末マーカーのそれぞれの位置が特定されたときに、前記特定位置に対応する前記基地局からの前記減衰量が与えられた前記第1のRF信号と当該特定位置に対応する前記リレーノードからの前記減衰量が与えられた前記第2のRF信号とが多重された信号を模擬した前記試験信号を送信することを特徴とするリレーノードシミュレーター(1)である。
また、請求項6に記載の発明は、基地局からの第1のRF信号を中継して第2のRF信号として移動体通信端末へ送信するリレーノードを模擬し、前記第1のRF信号と前記第2のRF信号とが多重された信号を模擬した試験信号を試験対象の移動体通信端末に送信する試験方法であって、前記基地局に相当する基地局マーカー(VeNB)と、前記リレーノードに相当するリレーノードマーカー(VRN)と、前記移動体通信端末に相当する端末マーカー(VUE)とを所定の座標系に対応付けて、操作画面上に相対的に移動可能に表示させる画面表示ステップと、前記座標系における、前記基地局マーカー、前記リレーノードマーカー、及び前記端末マーカーのそれぞれの位置を特定する位置特定ステップと、特定された前記基地局マーカーの位置と前記リレーノードマーカーの位置とに対して、前記端末マーカーの位置を変数として、前記移動体通信端末に到達するまでの前記第2のRF信号の遅延量を算出する遅延量算出ステップと、算出された前記遅延量に基づき、前記端末マーカーの位置に応じた前記遅延量の大きさを識別可能なパターン(G11)として前記操作画面上に表示させるパターン生成ステップと、前記パターン上で前記端末マーカーの位置が指定されたときに、前記第1のRF信号と当該指定位置に対応する前記遅延量が与えられた前記第2の信号とが多重された信号を模擬した前記試験信号を送信する送信ステップと、を備えたことを特徴とする試験方法である。
また、請求項7に記載の発明は、基地局からの第1のRF信号を中継して第2のRF信号として移動体通信端末へ送信するリレーノードを模擬し、前記第1のRF信号と前記第2のRF信号とが多重された信号を模擬した試験信号を試験対象の移動体通信端末に送信する試験方法であって、前記基地局に相当する基地局マーカー(VeNB)と、前記リレーノードに相当するリレーノードマーカー(VRN)と、前記移動体通信端末に相当する端末マーカー(VUE)とを所定の座標系に対応付けて、操作画面上に相対的に移動可能に表示させる画面表示ステップと、前記座標系における、前記基地局マーカー、前記リレーノードマーカー、及び前記端末マーカーのそれぞれの位置を特定する位置特定ステップと、前記基地局と前記リレーノードとのそれぞれの機器からの信号について、対応するマーカーからの前記座標系における距離に応じた減衰量を算出するゲイン算出ステップと、算出された前記減衰量を基に、前記座標系の各位置における前記それぞれの機器からの信号の前記減衰量の大きさを識別可能なパターン(G21、G22)として前記操作画面上に表示させるパターン生成ステップと、前記パターン上で前記基地局マーカー、前記リレーノードマーカー、及び前記端末マーカーのそれぞれの位置が特定されたときに、当該特定位置に対応する前記基地局からの前記減衰量が与えられた前記第1のRF信号と当該特定位置に対応する前記リレーノードからの前記減衰量が与えられた前記第2のRF信号とが多重された信号を模擬した前記試験信号を送信する送信ステップと、を備えたことを特徴とする試験方法である。
また、請求項8に記載の発明は、基地局からの第1のRF信号を中継して第2のRF信号として移動体通信端末へ送信するリレーノードを模擬し、前記第1のRF信号と前記第2のRF信号とが多重された信号を模擬した試験信号を試験対象の移動体通信端末に送信する試験方法であって、前記基地局に相当する基地局マーカー(VeNB)と、前記リレーノードに相当するリレーノードマーカー(VRN)と、前記移動体通信端末に相当する端末マーカー(VUE)とを所定の座標系に対応付けて、操作画面上に相対的に移動可能に表示させる画面表示ステップと、前記座標系における、前記基地局マーカー、前記リレーノードマーカー、及び前記端末マーカーのそれぞれの位置を特定する位置特定ステップと、前記移動体通信端末が受信する信号について、前記端末マーカーからの前記座標系における距離に応じた減衰量を算出するゲイン算出ステップと、算出された前記減衰量を基に、前記座標系の各位置における前記減衰量の大きさを識別可能なパターン(G31)として前記操作画面上に表示させるパターン生成ステップと、前記パターン上で前記基地局マーカー、前記リレーノードマーカー、及び前記端末マーカーのそれぞれの位置が特定されたときに、前記特定位置に対応する前記基地局からの前記減衰量が与えられた前記第1のRF信号と当該特定位置に対応する前記リレーノードからの前記減衰量が与えられた前記第2のRF信号とが多重された信号を模擬した前記試験信号を送信する送信ステップと、を備えたことを特徴とする試験方法である。
【発明の効果】
【0008】
本発明に係るリレーノードシミュレーター及び試験方法は、基地局マーカー及びリレーノードマーカーの位置に基づき、端末マーカーの位置を変化させた場合における、移動体通信端末に到達するまでの第1のRF信号に対する第2のRF信号の遅延量を算出し、この遅延量の大きさを識別可能に操作画面上に表示させる。そして、操作画面上で指定された端末マーカーの位置に対応する遅延量に応じた試験信号を生成して送信する。これにより、基地局マーカー、リレーノードマーカー、及び端末マーカーの位置関係を決めるだけで、この位置関係に応じた試験信号を生成するための遅延量を設定することが可能となり、この遅延量を容易に設定できる。
【0009】
また、本発明に係るリレーノードシミュレーター及び試験方法は、操作画面上で指定された端末マーカーからの座標系における距離に応じた減衰量を算出し、この減衰量の大きさを識別可能に操作画面上に表示させる。そして、操作画面上で特定された基地局マーカー、リレーノードマーカー、及び端末マーカーのそれぞれの位置に対応する減衰量に応じた試験信号を生成して送信する。これにより、基地局マーカー、リレーノードマーカー、及び端末マーカーの位置関係を決めるだけで、この位置関係に応じた試験信号を生成するための減衰量を設定することが可能となり、この減衰量を容易に設定できる。
【図面の簡単な説明】
【0010】
【図1】本発明に係るリレーノードシミュレーターの概略的な構成を示したブロック図である。
【図2A】ダウンリンク処理部の詳細な構成を示したブロック図である。
【図2B】UI制御部の詳細な構成を示したブロック図である。
【図3】基地局、リレーノード、及び移動体通信端末の位置関係を示した概略図である。
【図4A】基地局からの信号とリレーノードからの信号の関係を示した概略図である。
【図4B】基地局からの信号とリレーノードからの信号の関係を示した概略図である。
【図4C】基地局からの信号とリレーノードからの信号の関係を示した概略図である。
【図5A】本発明に係るUIの操作方法について説明するための図である。
【図5B】本発明に係るUIの操作方法について説明するための図である。
【図6A】UI上に表示されるパターンの一例である。
【図6B】UI上に表示されるパターンの一例である。
【図6C】UI上に表示されるパターンの一例である。
【図7】UI制御部の一連の動作を示したフローチャートである。
【発明を実施するための形態】
【0011】
本発明に係るリレーノードシミュレーター1は、リレーノードを模擬するためのシミュレーターである。リレーノードシミュレーター1は、図1に示すように、eNB(基地局模擬装置)500と被試験端末600との間に介在する。リレーノードシミュレーター1は、ダウンリンク処理部10と、アップリンク処理部20と、方向性結合器31と、方向性結合器32とを含んで構成されている。
【0012】
方向性結合器31は、eNB500からRF信号(即ち、基地局信号)E0’を受けて、これをダウンリンク処理部10に伝送する。また、方向性結合器31は、アップリンク処理部20から信号を受けて、これをeNB500に転送する。
【0013】
ダウンリンク処理部10は、リレーノードのダウンリンクに係る処理を模擬するための処理ブロックである。ダウンリンク処理部10は、方向性結合器31を介してeNB500から送信されたアナログのRF信号E0’を受ける。ダウンリンク処理部10は、eNB500から信号を基にリレーノードの出力としてのベースバンド信号E1を生成するとともに、このベースバンド信号E1にeNB500からのベースバンド信号E0を合成してRF信号に変換し、試験信号として被試験端末600に向けて送信する。このダウンリンク処理部10の詳細な構成と動作については後述する。
【0014】
方向性結合器32は、ダウンリンク処理部10からの試験信号を受けて、これを被試験端末600に伝送する。また、方向性結合器32は、被試験端末600から送信された信号を受けて、これをアップリンク処理部20に伝送する。
【0015】
アップリンク処理部20は、リレーノードのアップリンクに係る処理を模擬するための処理ブロックである。アップリンク処理部20は、方向性結合器32を介して被試験端末600から送信されたアナログのRF信号を受ける。アップリンク処理部20は、このRF信号を復調し、所定の通信方式に基づきデジタルデータに復号する。アップリンク処理部20は、復号されたデジタルデータのうち、制御信号に相当するデータをリレーノードの設定に基づき書き替える。アップリンク処理部20は、このデジタルデータを所定の通信方式に基づき符号化し、アナログのRF信号に変調してeNB500に向けて送信する。なお、アップリンク処理部20の具体的な動作は、「3GPP TS36.211 V10.0.0」等で定義されている。
【0016】
次に、ダウンリンク処理部10の詳細について説明する。まず、図3を参照する。図3は、基地局eNBと、リレーノードRNと、移動体通信端末UEとの位置関係を模式的に示した図である。例えば、基地局eNBと移動体通信端末UEとの間の距離をL0、基地局eNBとリレーノードRNとの間の距離をL1、リレーノードRNと移動体通信端末UEとの間の距離をL2とする。
【0017】
このリレーノードRNがレイヤ3のリレーノードの場合には、基地局eNBから送信されたRF信号E0’と、RF信号E0’を中継してリレーノードRNから出力されるRF信号E1’とは、異なる信号として取り扱われる。このような場合において、RF信号E0’とRF信号E1’とが同一周波数で送信されると、リレーノードRNからの送信信号(RF信号E1’)がリレーノードRNの受信側(RF信号E0’)に回り込み、干渉する可能性がある。そのため、このような場合には、リレーノードRNは、基地局eNBから送信されたRF信号E0’の受信と、移動体通信端末UEに向けたRF信号E1’の送信を時分割で行う。このような場合には、基地局eNBから送信されるRF信号E0’は、サブフレームごとに時分割されて所定のタイミングで移動体通信端末やリレーノードに送信される。リレーノードRNは、このタイミングにあわせて、RF信号E0’を受信し、RF信号E0’の受信とは異なるタイミングでRF信号E1’を移動体通信端末UEに向けて送信する。この、RF信号E0’及びRF信号E1’の双方を受信可能なエリアでは、RF信号E0’とRF信号E1’とが、移動体通信端末UEにむけて、時分割で送信されることになる。図4Aに、このような場合における、RF信号E0’とRF信号E1’との関係の概略を示す。
【0018】
移動体通信端末UEは、理想的には、図4Aに示すようにRF信号E1’とRF信号E0’とを時分割で受信する。しかしながら、基地局eNB、リレーノードRN、及び移動体通信端末UEとの間の位置関係に応じて、これらの信号の減衰や遅延が生じる場合がある。以下では、理解を容易にするために、基地局eNBの信号出力レベルと、リレーノードRNの信号出力レベルとが同じであるものとして説明する。例えば、図4Bは、RF信号E1’に遅延が生じた場合を示している。このような場合には、RF信号E0’とRF信号E1’との間で干渉が生じる。また、距離L0に応じてRF信号E0’が減衰する。例えば、図4Cは、距離L0>L2の場合を示しており、この場合には、RF信号E1’のレベルに対してRF信号E0’のレベルが低くなる。本実施形態に係るリレーノードシミュレーターのダウンリンク処理部10は、このような環境を模擬し、移動体通信端末UEに相当する被試験端末600の動作を試験する。なお、この場合には、eNB500が基地局eNBに相当し、ダウンリンク処理部10が、リレーノードRNのダウンリンク処理部分と、距離L0とL2の距離差に応じた、基地局eNBからの信号とリレーノードRNからの信号とのレベル差及び遅延とを模擬する。具体的には、ダウンリンク処理部10は、eNB500からRF信号E0’を受けて、これを基に、RF信号E0’とRF信号E1’とが加算された試験信号を生成して被試験端末600(即ち、移動体通信端末)に向けて送信する。
【0019】
ダウンリンク処理部10の構成について、図2Aを参照しながら説明する。図2Aは、ダウンリンク処理部10の詳細な構成を示したブロック図である。図2Aに示すように、ダウンリンク処理部10は、受信部11と、リレーノード処理部12と、ゲイン調整部131と、遅延処理部132と、ゲイン調整部14と、加算器15と、送信部16と、制御部17と、UI制御部18とを含んで構成されている。リレーノード処理部12は、実際のリレーノードのベースバンド信号処理を模擬する構成となっており、実際のリレーノードが生成すべきベースバンド信号を生成するようになっている。このリレーノードが生成すべきベースバンド信号は、リレーノードが移動体通信端末に向けて送信するRF信号に対応したベースバンド信号である。リレーノード処理部12は、復調部121と、U−Plane再生処理部122と、U−Plane伝送処理部123と、C−Plane伝送処理部124と、変調部125とを含んで構成されている。
【0020】
受信部11は、所定のタイミングに基づきeNB500から時分割で送信されたRF信号E0’を受ける。受信部11は、受けたRF信号をIF(中間周波数)信号に周波数変換し、このIF信号をA/D変換して周波数シフトを行うことでデジタルのベースバンド信号E0を得る。このベースバンド信号E0は、RF信号E0’に対応したベースバンド信号である。受信部11は、このベースバンド信号E0を復調部121及びゲイン調整部14にそれぞれ出力する。
【0021】
復調部121、U−Plane再生処理部122、U−Plane伝送処理部123、C−Plane伝送処理部124、及び変調部125は、模擬されるリレーノードRNの復調・復号処理及び符号・変調処理を行う部分の構成に相当する。そのため、これらの構成は、あらかじめ決められた通信方式の規約(例えば、3GPP TS36.211 V10.0.0)に準拠して動作する。以降では、これらの構成の一例を説明する。
【0022】
復調部121は、受信部11からのベースバンド信号E0を受けて、復調処理を行う。この復調された信号は、所定の通信方式(LTE)に応じた符号化方式(例えば、OFDMA)に基づくフレーム構造を有する。
【0023】
復調部121は、前述した所定の通信方式に基づき復調された信号を復号してデジタルデータを取り出す。復調部121は、取り出されたデジタルデータを、U−Plane再生処理部122に出力する。また、復調部121は、C−Plane伝送処理部124にC−Planeの生成を行うための情報を送出する。また、復調部121は、ベースバンド信号E0の同期タイミングを変調部125に通知する。
【0024】
ここで、復調された信号を復号して取出されたデジタルデータのプロトコル構成について説明する。このデータは、U−Plane(User Plane)プロトコルと、C−Plane(Control Plane)プロトコルとを含んで構成されている。U−Planeプロトコルは、ユーザーデータを取り扱うプロトコルである。以降では、単にU−Planeと呼ぶ。また、C−Planeプロトコルは、制御を行うためのデータを取り扱うプロトコルである。以降では、単にC−Planeと呼ぶ。
【0025】
U−Plane再生処理部122は、復調部121からデジタルデータを受ける。U−Plane再生処理部122は、このデジタルデータのC−Planeに含まれる制御情報に基づき、デジタルデータからU−Planeを再生する。U−Plane再生処理部122は、再生されたU−PlaneをU−Plane伝送処理部123に出力する。
【0026】
U−Plane伝送処理部123は、U−Plane再生処理部122からU−Planeを受ける。U−Plane伝送処理部123は、基地局と同等の無線制御機能を有している。この無線制御機能には、例えば、PDCP(Packet Data Convergence Protocol)サブレイヤ、RLC(Radio Link Control)サブレイヤ、MAC(Medium Access Control)サブレイヤ、RRC(Radio Resource Control)サブレイヤが含まれる。PDCPサブレイヤは、ユーザーデータの秘匿及びヘッダ圧縮等を行う。また、RLCサブレイヤは、ARQ(Automatic Repeat reQuest)による再送制御及びSDU(Service Data Unit)分割、結合及び順序制御等を行う。また、MACサブレイヤは、HARQ及びユーザーデータスケジューリング等を行う。また、RRCサブレイヤは、モビリティ、QoS、セキュリティ制御を行う。U−Plane伝送処理部123は、受けたU−Planeに対してこれらの無線制御を行う。U−Plane伝送処理部123は、無線制御が施されたU−Planeを変調部125に出力する。
【0027】
C−Plane伝送処理部124は、復調部121及び制御部17からの情報を受けて、ダウンリンク処理部10が模擬するリレーノードRNと被試験端末600との間のネットワークを制御するためのデータ、即ち、C−Planeを生成する。この生成されたC−Planeに基づき、例えば、模擬されるリレーノードRNと被試験端末600との間の伝送路の設定や、ハンドオーバーの制御等が行われる。C−Plane伝送処理部124は、生成されたC−Planeを変調部125に出力する。
【0028】
変調部125は、U−Plane伝送処理部123からU−Planeを受ける。また、変調部125は、C−Plane伝送処理部124からC−Planeを受ける。変調部125は、受けたC−Plane及びU−Planeによりデジタルデータを生成する。変調部125は、生成されたデジタルデータを所定の通信方式に基づき符号化及びデジタル変調してベースバンド信号を生成する。また、変調部125は、同期タイミングを復調部121から受ける。変調部125は、生成されたベースバンド信号が、この通知された同期タイミングに同期するように、このベースバンド信号に対して遅延処理を施す。変調部125は、遅延処理が施されたベースバンド信号E1をゲイン調整部131に出力する。
【0029】
ゲイン調整部131は、変調部125から、ベースバンド信号E1を受ける。また、ゲイン調整部131は、測定条件としてあらかじめ設定されたリレーノードから出力される信号のレベルPrnを示す情報を制御部17から受ける。ゲイン調整部131は、ベースバンド信号E1のレベルがレベルPrnとなるようにゲインを決定し、そのゲインでベースバンド信号E1のレベルを調整する。
【0030】
なお、ゲイン調整部131は、実回線で想定されるリレーノードRNと被試験端末600(即ち、移動体通信端末UE)との間におけるベースバンド信号E1の減衰量を算出し、ベースバンド信号E1のレベルを、レベルPrnからこの減衰量分だけ減衰させたレベルとなるようにゲインを調整してもよい。この場合には、ゲイン調整部131は、あらかじめ設定されたリレーノードと被試験端末600との間の距離(例えば、距離L2)を示す情報を制御部17から受けて、この距離を示す情報を基にベースバンド信号の減衰量を算出すればよい。
【0031】
ゲイン調整部131は、レベルが調整されたベースバンド信号E1を遅延処理部132に出力する。
【0032】
遅延処理部132は、レベルが調整されたベースバンド信号E1をゲイン調整部131から受ける。また、遅延処理部132は、制御部17から遅延量D1を示す情報を受ける。遅延処理部132は、ベースバンド信号E1に遅延量D1を与える。なお、後述するように、ベースバンド信号E0とE1は加算されて周波数変換され、試験信号であるRF信号になる。この試験信号には、ベースバンド信号E0が周波数変換されたRF信号E0’と、ベースバンド信号E1が周波数変換されたRF信号E1’とが含まれる。ここで、図4Bに、遅延処理部132により、遅延が与えられたRF信号E1’と、eNB500から送信されたRF信号E0’との関係を示す。このように、遅延処理部132によりRF信号E1’に遅延量D1を施すことにより、基地局eNB、リレーノードRN、及び移動体通信端末UEとの間の位置関係に基づくRF信号E1’の遅延を模擬する。これにより、この遅延による、RF信号E0’とRF信号E1’との間の干渉を模擬することが可能となる。遅延処理部132は、遅延が与えられたベースバンド信号E1を加算器15に出力する。
【0033】
次に、ダウンリンク処理部10の、ベースバンド信号E0の出力に係る構成について説明する。ダウンリンク処理部10は、ベースバンド信号E0のレベルを調整して出力することで、図4Cに示すような、eNB500(即ち、基地局eNB)と被試験端末600(即ち、移動体通信端末UE)との間の距離L0によるRF信号E0’の減衰を模擬する。これらを模擬する構成がゲイン調整部14である。各構成について以下に説明する。なお、本発明のリレーノードシミュレーターは、レベルが制御されたベースバンド信号を周波数変換してRF信号とすることにより、レベルが制御されたRF信号を出力するようになっている。
【0034】
ゲイン調整部14は、受信部11からベースバンド信号E0を受ける。また、ゲイン調整部14は、制御部17からゲインGenbを示す情報を受ける。ゲイン調整部14は、ベースバンド信号E0のレベルを、ゲインGenbで減衰もしくは増幅させることで調整する。これにより、ベースバンド信号E0のレベルが、図4Cに示すようにレベルPenb’に調整される。これにより、基地局eNBと移動体通信端末UEとの間の距離L0に応じたRF信号E0’の減衰を模擬することが可能となる。ゲイン調整部14は、レベルが調整されたベースバンド信号E0を加算器15に出力する。
【0035】
加算器15は、遅延が与えられたベースバンド信号E1を遅延処理部132から受ける。また、加算器15は、レベルが調整されたベースバンド信号E0をゲイン調整部14から受ける。加算器15は、ベースバンド信号E0とベースバンド信号E1とを加算し、加算された信号を送信部16に出力する。送信部16は、加算された信号をD/A変換して周波数変換し、これにより得られたRF信号を試験信号として被試験端末600に向けて送信する。
【0036】
制御部17は、UI19を介して操作者が指定した測定条件やリレーノードRNの設定情報をUI制御部18から受ける。制御部17は、測定条件として指示された、レベルPrn、ゲインGenb、及び遅延量D1を受ける。制御部17は、レベルPrnをゲイン調整部131に出力する。これを受けて、ゲイン調整部131は、ベースバンド信号E1のレベルを調整する。また、制御部17は、遅延量D1を示す情報を遅延処理部132に出力する。これを受けて、遅延処理部132は、ベースバンド信号E1に遅延量D1を与える。また、制御部17は、レベルPrn及びゲインGenbをゲイン調整部14に出力する。これを受けて、ゲイン調整部14は、ベースバンド信号E0のレベルを調整する。
【0037】
制御部17は、UI19を介して操作者から入力されたリレーノードRNの設定情報(例えば、リレーノードRNの識別情報)をUI制御部18から受ける。制御部17は、この設定情報のうち、C−Planeを生成するために必要な情報をC−Plane伝送処理部124に送出する。
【0038】
UI制御部18は、測定条件やリレーノードRNの設定情報を指定するための操作画面をUI19に表示させる。また、UI制御部18は、この操作画面に基づく操作者から指示をUI19から受けて、これらの情報を生成して制御部17に出力する。これにより、制御部17は、ダウンリンク処理部10の各構成の動作を、操作者により指定された測定条件や設定情報に基づき制御することが可能となる。
【0039】
また、UI制御部18は、基地局マーカーVeNBと、リレーノードマーカーVRNと、端末マーカーVUEとを含む操作画面をUI19に表示させる。基地局マーカーVeNBは、基地局eNBを模擬している。また、リレーノードマーカーVRNは、リレーノードRNを模擬している。また、端末マーカーVUEは、移動体通信端末UEを模擬している。UI制御部18は、UI19を介して操作者による基地局マーカーVeNB、リレーノードマーカーVRN、及び端末マーカーVUEの位置の指定を受けて、これらの位置に基づき、遅延量D1、ゲインGenb、及びレベルPrnを決定する。以降では、まず、この操作画面の構成について図5A及び図5Bを参照しながら説明し、その後、この操作画面の生成及び表示に係る詳細な動作について、UI制御部18の詳細な構成とあわせて説明する。図5A及び図5Bは、この操作画面の一例を示しており、この操作画面の操作方法を説明するための図である。
【0040】
(操作画面の構成)
図5A及び図5Bに示すように、遅延及びゲインを指定するための操作画面は、基地局マーカーVeNBと、リレーノードマーカーVRNと、端末マーカーVUEとを含んで構成されている。これらのマーカーは、あらかじめ決められた共通の座標系に対応付けられている。なお、以降は、単に「座標系」と記載した場合には、この共通の座標系を指すものとする。図5A及び図5Bに示した例では、横軸をx軸、縦軸をy軸としている。この操作画面は、これらの各マーカーを前述した座標系上の所望の位置に配置することにより、実環境における基地局eNB、リレーノードRN、及び移動体通信端末UEの位置関係を指定可能に構成されている。
【0041】
まず、図5Aを参照する。この操作画面では、基地局マーカーVeNBは、座標系上の所定の位置(例えば、原点O(0,0))に固定されている。また、リレーノードマーカーVRNは、基地局マーカーVeNBを基点として、所定の方向にのみ(一次元的に)移動可能に構成されている。図5Aの例では、基地局マーカーVeNBは、x方向に沿ってのみ移動可能に構成されている。基地局マーカーVeNBの位置が指定されることにより、座標系上における基地局マーカーVeNBとリレーノードマーカーVRNとの間の距離L1’がUI制御部18に含まれる遅延量算出部183により算出される。この距離L1’を基に、実環境上における基地局eNBとリレーノードRNとの間の距離L1が算出される。遅延量算出部183の構成と、この動作の詳細については後述する。なお、基地局マーカーVeNB及びリレーノードマーカーVRNの相対的な位置をして可能であればよく、例えば、リレーノードマーカーVRNの位置を固定し、基地局マーカーVeNBを一次元的に移動可能に構成してもよい。なお、以降では、基地局マーカーVeNBが固定されているものとして説明する。
【0042】
次に、図5Bを参照する。基地局マーカーVeNB及びリレーノードマーカーVRNの位置が指定されると、端末マーカーVUEが、座標系上において、その位置を指定可能に表示される。このとき、端末マーカーVUEの移動は特に制約されることなく、二次元的に移動可能に表示される。端末マーカーVUEの位置が指定されることにより、座標系上における端末マーカーVUEと基地局マーカーVeNBとの間の距離L0’と、端末マーカーVUEとリレーノードマーカーVRNのとの間の距離L2’とが算出される。この距離L0’を基に、実環境上における移動体通信端末UEと基地局eNBとの間の距離L0が算出される。また、距離L2’を基に、実環境上における移動体通信端末UEとリレーノードRNとの間の距離L2が算出される。
【0043】
また、本発明に係る操作画面では、基地局マーカーVeNB及びリレーノードマーカーVRNの位置が特定されると、遅延量算出部183が、座標系上の各位置におけるRF信号E0’とRF信号E1’との間の遅延量D1を算出する。その後、パターン表示制御部1822が、これを識別可能に提示したパターンG11を操作画面上に表示させる。パターン表示制御部1822の詳細については後述する。図6Aは、このパターンG11の一例を示している。図6Aでは、算出された各遅延量D1を基に等値線を描画することで、座標系上の各位置に応じた遅延量D1の変化を識別可能に表示している。なお、このパターンG11の生成に係る構成及び動作については、パターン表示制御部1822の構成とあわせて後述する。このパターンG11により、操作者は、端末マーカーVUEの位置を変化させた場合に、各位置における遅延量D1の変化を容易に識別することが可能となる。なお、パターンG11が、「第1のパターン」に相当する。
【0044】
また、座標系上の各位置におけるRF信号E0’及びRF信号E1’の各減衰量を算出し、これを識別可能に提示したパターンG21及びG22を表示させてもよい。図6Bは、このパターンG21及びG22の一例を示している。図6Bでは、算出された各減衰量を基に等値線を描画することで、座標系上の各位置におけるRF信号E0’及びRF信号E1’ の減衰量を識別可能に表示している。なお、このパターンG21及びG22の生成に係る構成及び動作については後述する。このパターンG21及びG22により、操作者は、基地局マーカーVeNB及びリレーノードマーカーVRNの相対的な位置関係に応じて、各位置におけるRF信号E0’及びRF信号E1’ の減衰量の変化を容易に識別することが可能となる。
【0045】
また、端末マーカーVUEの位置指定を受けて、座標系上の各位置における移動体通信端末UEからの信号の減衰量を算出し、これを識別可能に提示したパターンG31を表示させてもよい。図6Cは、このパターンG31の一例を示している。図6Cでは、算出された各減衰量を基に等値線を描画することで、座標系上の各位置における減衰量を識別可能に表示している。このパターンG31により、操作者は、端末マーカーVUEの位置に応じた、各位置における移動体通信端末UEから信号の減衰量の変化を容易に識別することが可能となる。なお、パターンG21、G22、及びG31が、「第2のパターン」に相当する。
【0046】
(UI制御部18の構成)
次に、UI制御部18の詳細な構成について図2Bを参照しながら説明する。図2Bは、UI制御部18の構成を示したブロック図である。図2Bに示すように、UI制御部18は、位置特定部181と、表示制御部182と、遅延量算出部183と、ゲイン算出部184と、設定情報記憶部185と、設定情報出力部186とを含んで構成されている。また、表示制御部182は、マーカー表示制御部1821と、パターン表示制御部1822と、設定情報表示制御部1823とを含んで構成されている。
【0047】
位置特定部181は、UI19から、操作者により指定されたリレーノードマーカーVRNの位置を示す情報(以降では、「位置情報」と呼ぶ)を受ける。例えば、図5Aの場合には、位置特定部181は、UI19からリレーノードマーカーVRNの位置を示す座標P1(L1’,0)を位置情報として受ける。位置特定部181は、リレーノードマーカーVRNの位置情報を表示制御部182に出力する。これを受けて、表示制御部182は、操作画面上のリレーノードマーカーVRNの表示位置を更新し、この操作画面をUI19上に表示させる。また、位置特定部181は、基地局マーカーVeNB及びリレーノードマーカーVRNそれぞれの位置情報を遅延量算出部183及びゲイン算出部184に出力する。
【0048】
また、リレーノードマーカーVRNの位置の特定後に、位置特定部181は、UI19から、操作者により指定された端末マーカーVUEの位置を示す情報を受ける。例えば、図5Bの場合には、位置特定部181は、UI19から端末マーカーVUEの位置を示す座標P2(x1,y1)を位置情報として受ける。位置特定部181は、端末マーカーVUEの位置情報を表示制御部182に出力する。これを受けて、表示制御部182は、操作画面上の端末マーカーVUEの表示位置を更新し、この操作画面をUI19上に表示させる。また、位置特定部181は、端末マーカーVUEの位置情報を遅延量算出部183及びゲイン算出部184に出力する。
【0049】
遅延量算出部183は、位置特定部181から、基地局マーカーVeNB及びリレーノードマーカーVRNそれぞれの位置情報を受ける。遅延量算出部183は、これらの位置情報を基に、基地局マーカーVeNBとリレーノードマーカーVRNとの間の距離L1’を算出する。遅延量算出部183は、座標系上の各位置(以降では、「サンプリングポイント」と呼ぶ)に対して、その位置と、基地局マーカーVeNB及びリレーノードマーカーVRNのそれぞれとの間の距離L0’及びL2’を算出する。遅延量算出部183は、算出された距離L1’、L0’、及びL2’を基に、距離L0’と距離L1’+L2’との差Ddiffを算出する。Ddiffは、基地局マーカーVeNBの座標O(0,0)と、リレーノードマーカーVRNの座標P1(L1’,0)と、端末マーカーVUEの座標P2(x1,y1)とに基づき、以下の式1により算出される。なお、差Ddiffを算出するサンプリングポイント間の距離、即ち、分解能は適宜変更しても良い。
[式1]
【0050】
なお、この距離L0’に対応する実環境上の距離L0は、基地局eNBと移動体通信端末UEとの間の距離を示している。また、距離L1’+L2’に対応する実環境上の距離L1+L2は、基地局eNBからリレーノードRNを経由して移動体通信端末UEに至るまでの距離を示している。
【0051】
遅延量算出部183は、サンプリングポイントごとに算出されたDdiffを、あらかじめ決められた、操作画面上の距離と実環境上の距離との間の縮尺を示す情報を基に実環境上の距離に換算する。遅延量算出部183は、算出された距離を信号の伝搬速度cで除算することにより、各サンプリングポイントにおける遅延量D1を算出し、これをそのサンプリングポイントの位置情報と関連付ける。遅延量算出部183は、遅延量D1を示す情報が関連付けられた各サンプリングポイントの位置情報をパターン表示制御部1822に出力する。パターン表示制御部1822については後述する。
【0052】
また、基地局マーカーVeNB及びリレーノードマーカーVRNの位置の特定後に、遅延量算出部183は、位置特定部181から、端末マーカーVUEの位置情報を受ける。遅延量算出部183は、受けた位置情報に対応するサンプリングポイントを特定し、そのサンプリングポイントに関連付けられた遅延量D1を抽出する。遅延量算出部183は、抽出された遅延量D1を制御部17に出力する。これにより、この遅延量D1が、制御部17を介して遅延処理部132に設定される。なお、遅延量算出部183は、端末マーカーVUEの位置情報を受けたときに、式1に基づき、その位置に対応する遅延量D1を算出し、これを制御部17に出力するように動作させてもよい。
【0053】
なお、遅延量算出部183は、端末マーカーVUEの位置情報を受けたときに、基地局マーカーVeNB、リレーノードマーカーVRN、及び端末マーカーVUEの位置情報を基にDdiffを算出し、このDdiffを基に遅延量D1を算出してもよい。このように動作させることで、遅延量D1を、各マーカーの位置情報に基づき厳密に算出することが可能となる。
【0054】
ゲイン算出部184は、位置特定部181から、基地局マーカーVeNB及びリレーノードマーカーVRNそれぞれの位置情報を受ける。ゲイン算出部184は、これらの位置情報を基に、各サンプリングポイントに対して、その位置と、基地局マーカーVeNB及びリレーノードマーカーVRNのそれぞれとの間の距離L0’及びL2’を算出する。
【0055】
ゲイン算出部184は、サンプリングポイントごとに算出された距離L0’及びL2’を、あらかじめ決められた、操作画面上の距離と実環境上の距離との間の縮尺を示す情報を基に実環境上の距離L0及びL2に換算する。ゲイン算出部184は、算出された距離L0を基に、各サンプリングポイントにおけるRF信号E0’の減衰量Genb’を算出する。この減衰量Genb’が、基地局eNBから送信されたRF信号E0’が、距離L0だけ離れたサンプリングポイントに至るまでに減衰する減衰量を示している。また、ゲイン算出部184は、算出された距離L2を基に、各サンプリングポイントにおけるRF信号E1’の減衰量Grn’を算出する。この減衰量Grn’が、リレーノードRNから送信されたRF信号E1’が、距離L2だけ離れたサンプリングポイントに至るまでに減衰する減衰量を示している。ゲイン算出部184は、サンプリングポイントごとに算出された減衰量Genb’及び減衰量Grn’を、そのサンプリングポイントの位置情報に関連付ける。ゲイン算出部184は、減衰量Genb’及び減衰量Grn’が関連付けられた各サンプリングポイントの位置情報をパターン表示制御部1822に出力する。
【0056】
また、基地局マーカーVeNB及びリレーノードマーカーVRNの位置の特定後に、ゲイン算出部184は、位置特定部181から、端末マーカーVUEの位置情報を受ける。ゲイン算出部184は、各サンプリングポイントに対して、その位置と端末マーカーVUEとの間の距離L3’を算出する。ゲイン算出部184は、サンプリングポイントごとに算出された距離L3’を、あらかじめ決められた、操作画面上の距離と実環境上の距離との間の縮尺を示す情報を基に実環境上の距離L3に換算する。ゲイン算出部184は、算出された距離L3を基に、各サンプリングポイントにおける移動体通信端末UEからの信号の減衰量Gue’を算出する。この減衰量Gue’が、移動体通信端末UEから送信された信号が、距離L3だけ離れたサンプリングポイントに至るまでに減衰する減衰量を示している。ゲイン算出部184は、サンプリングポイントごとに算出された減衰量Gue’を、そのサンプリングポイントの位置情報に関連付ける。ゲイン算出部184は、減衰量Gue’が関連付けられた各サンプリングポイントの位置情報をパターン表示制御部1822に出力する。
【0057】
また、ゲイン算出部184は、受けた端末マーカーVUEの位置情報に対応するサンプリングポイントを特定し、そのサンプリングポイントに関連付けられた減衰量Genb’及び減衰量Grn’を抽出する。ゲイン算出部184は、抽出された減衰量Genb’及び減衰量Grn’を、ゲインGenb及びレベルGrnとして制御部17に出力する。これにより、このゲインGenb及びレベルGrnが、制御部17を介してゲイン調整部131及び14に設定される。
【0058】
表示制御部182は、位置特定部181から、リレーノードマーカーVRNの位置情報を受ける。表示制御部182は、この位置情報をマーカー表示制御部1821に出力し、操作画面上のリレーノードマーカーVRNの位置を更新させる。
【0059】
また、表示制御部182は、位置特定部181から、端末マーカーVUEの位置情報を受ける。表示制御部182は、この位置情報をマーカー表示制御部1821に出力し、操作画面上の端末マーカーVUEの位置を更新させる。
【0060】
マーカー表示制御部1821は、UI19から操作画面の表示指示を受けると、まず、図5Aに示した、リレーノードマーカーVRNの位置を指定するための操作画面を生成する。具体的には、マーカー表示制御部1821は、座標系上の所定の位置に基地局マーカーVeNBを固定し、基地局マーカーVeNBを基準として、リレーノードマーカーVRNを一次元的に移動可能に構成された操作画面を生成する。表示制御部182は、マーカー表示制御部1821が生成したこの操作画面をUI19に出力する。これにより、操作者は、図5Aに示すような操作画面を操作しながら、リレーノードマーカーVRNの位置を指定することが可能となる。
【0061】
次に、マーカー表示制御部1821は、表示制御部182からリレーノードマーカーVRNの位置情報を受ける。マーカー表示制御部1821は、この位置情報に基づき、操作画面上におけるリレーノードマーカーVRNの表示位置を更新する。また、マーカー表示制御部1821は、操作者の指示に基づき、リレーノードマーカーVRNの位置が特定されると、図5Bに示した、端末マーカーVUEの位置を指定するための操作画面を生成する。具体的には、マーカー表示制御部1821は、基地局マーカーVeNB及びリレーノードマーカーVRNに対して、端末マーカーVUEが二次元的に移動可能に構成された操作画面を生成する。表示制御部182は、マーカー表示制御部1821が生成したこの操作画面をUI19に出力する。これにより、操作者は、図5Bに示すような操作画面を操作しながら、端末マーカーVUEの位置を指定することが可能となる。
【0062】
また、マーカー表示制御部1821は、端末マーカーVUEの位置情報を受ける。マーカー表示制御部1821は、この位置情報に基づき、操作画面上における端末マーカーVUEの表示位置を更新する。
【0063】
パターン表示制御部1822は、基地局マーカーVeNB及びリレーノードマーカーVRNの位置の特定後に、遅延量算出部183から、遅延量D1を示す情報が関連付けられた各サンプリングポイントの位置情報を受ける。パターン表示制御部1822は、受けた各サンプリングポイントの位置情報を、座標系上の位置と対応付ける。これにより、座標系上の位置に対応するサンプリングポイントの位置情報に関連付けられた遅延量D1が、その座標系上の位置に関連付けられる。パターン表示制御部1822は、座標系上の各位置に関連付けられた遅延量D1を識別可能に表示させたパターンG11を生成する。図6Aは、このパターンG11の一例を示している。具体的には、パターン表示制御部1822は、遅延量D1の値が略同一のサンプリングポイントを特定し、それらを結んだ曲線を生成する。パターン表示制御部1822は、この曲線の生成に係る処理を、遅延量D1の値を所定の範囲で変化させながら、その値ごとに実行する。これにより、図6Aに示すようなパターンG11(即ち、等値線)が生成される。
【0064】
表示制御部182は、パターン表示制御部1822が生成したパターンG11を、マーカー表示制御部1821が生成した図5Bに示す操作画面に重畳表示させる。これにより、操作者は、端末マーカーVUEの位置を変化させた場合に、各位置における遅延量D1の変化を容易に識別することが可能となる。したがって、操作者は、端末マーカーVUEを所望する遅延量D1を示す位置に設定することで、試験を実行するための遅延量D1を選択的に容易に設定することが可能となる。
【0065】
また、パターン表示制御部1822は、基地局マーカーVeNB及びリレーノードマーカーVRNの位置の特定後に、ゲイン算出部184から、減衰量Genb’及び減衰量Grn’が関連付けられた各サンプリングポイントの位置情報を受ける。パターン表示制御部1822は、受けた各サンプリングポイントの位置情報を、座標系上の位置と対応付ける。これにより、座標系上の位置に対応するサンプリングポイントの位置情報に関連付けられた減衰量Genb’及び減衰量Grn’が、その座標系上の位置に関連付けられる。パターン表示制御部1822は、座標系上の各位置に関連付けられた減衰量Genb’及び減衰量Grn’を識別可能に表示させたパターンG21及びG22を生成する。図6Bは、このパターンG21及びG22の一例を示している。例えば、パターンG21を生成する場合には、パターン表示制御部1822は、減衰量Genb’の値が略同一のサンプリングポイントを特定し、それらを結んだ曲線を生成する。パターン表示制御部1822は、この曲線の生成に係る処理を、減衰量Genb’の値を所定の範囲で変化させながら、その値ごとに実行する。これにより、図6Bに示すようなパターンG21(等値線)が生成される。同様に、パターンG22の場合には、パターン表示制御部1822は、減衰量Grn’の値を基にパターンG22を形成する各曲線を生成する。なお、減衰量Genb’及び減衰量Grn’は、対応する機器(基地局eNB及びリレーノードマーカーRN)から遠くなるにつれてその値は増加する。そのため、図6Bに示すように、パターンG21及びG22それぞれを形成する各曲線は、対応するマーカーを中心とした同心円となる。
【0066】
表示制御部182は、パターン表示制御部1822が生成したパターンG21及びG22を、マーカー表示制御部1821が生成した図5Bに示す操作画面に重畳表示させる。これにより、操作者は、基地局マーカーVeNB及びリレーノードマーカーVRNの相対的な位置関係に応じて、各位置におけるRF信号E0’及びRF信号E1’ の減衰量の変化を容易に識別することが可能となる。したがって、操作者は、端末マーカーVUEを所望する減衰量Genb’及び減衰量Grn’を示す位置に設定することで、試験を実行するための減衰量Genb’及び減衰量Grn’を選択的に容易に設定することが可能となる。
【0067】
また、パターン表示制御部1822は、端末マーカーVUEの位置の特定後に、ゲイン算出部184から、減衰量Gue’が関連付けられた各サンプリングポイントの位置情報を受ける。パターン表示制御部1822は、受けた各サンプリングポイントの位置情報を、座標系上の位置と対応付ける。これにより、座標系上の位置に対応するサンプリングポイントの位置情報に関連付けられた減衰量Gue’が、その座標系上の位置に関連付けられる。パターン表示制御部1822は、座標系上の各位置に関連付けられた減衰量Gue’を識別可能に表示させたパターンG31を生成する。図6Cは、このパターンG31の一例を示している。具体的には、パターン表示制御部1822は、減衰量Gue’の値が略同一のサンプリングポイントを特定し、それらを結んだ曲線を生成する。パターン表示制御部1822は、この曲線の生成に係る処理を、減衰量Gue’の値を所定の範囲で変化させながら、その値ごとに実行する。これにより、図6Cに示すようなパターンG31(即ち、等値線)が生成される。なお、減衰量Gue’は、移動体通信端末UEから遠くなるにつれてその値は増加する。そのため、図6Cに示すように、パターンG31を形成する各曲線は、端末マーカーVUEを中心とした同心円となる。
【0068】
表示制御部182は、パターン表示制御部1822が生成したパターンG31を、マーカー表示制御部1821が生成した図5Bに示す操作画面に重畳表示させる。これにより、操作者は、端末マーカーVUEの位置に応じた、各位置における移動体通信端末UEから信号の減衰量の変化を容易に識別することが可能となる。
【0069】
なお、パターンG11、G21、G22、及びG31は、等値線に限らず、例えば、算出された値(遅延量または減衰量)を所定の色と関連付けて、その値に応じて座標系上の各領域を色分けして表示(例えば、グラデーション表示)させてもよい。
【0070】
また、パターンG11、G21、G22、及びG31は、それぞれを切り替えながら表示可能に構成してもよいし、これらのうちの一部または全部を重畳表示させてもよい。
【0071】
また、パターンG11、G21、G22、及びG31は、座標系上の位置と、算出された値(即ち、遅延量または減衰量の値)とが、必ずしも厳密に1対1で対応している必要は無い。例えば、座標系上を大まかに複数の領域に分割し、各領域に対して、その領域に含まれる位置のいずれかに対応する値を割当ててもよい。また、図6A〜図6Cにおいて曲線で提示された各パターンを、例えば、各曲線の一部もしくは全部を近似した直線により描画してもよい。これらのような場合には、指定された位置に基づく値(遅延量または減衰量の値)を試験に用いるように動作させてもよいし、その位置が含まれる領域に関連付けられた値を用いるように動作させてもよい。
【0072】
また、上記では、サンプリングポイントごとに遅延量または減衰量を算出していたが、これに替えて、各マーカーの位置を変数として各パターン(例えば、パターンG11、G21、G22、及びG31)を生成してもよい。例えば、遅延量の場合には、差Ddiffを変化させながら式1をx1及びy1の式に展開することで、パターンG11(等値線)を形成する遅延量ごとの各曲線を表す関数として導出することが可能である。また、減衰量の場合には、各マーカーからの距離と減衰量との関係に基づき、そのマーカーを中心とした円を表す関数を、減衰量ごとに導出することが可能である。このとき、減衰量ごとの各円は、前述したとおり、対応するマーカーを中心とした同心円となる。
【0073】
設定情報表示制御部1823は、リレーノードRNの設定情報を指定するための操作画面を生成するための構成である。この設定情報には、例えば、リレーノードRNの識別情報や、C−Planeを生成するために必要な情報等が含まれる。この設定情報を指定するためのテンプレートや選択肢等の情報は、あらかじめ生成されて設定情報記憶部185に記憶されている。設定情報表示制御部1823は、設定情報記憶部185に記憶された情報に基づき、設定情報を指定するための操作画面を生成する。表示制御部182は、設定情報表示制御部1823が生成したこの操作画面をUI19に出力する。これにより、操作者は、この操作画面に基づきリレーノードRNの設定情報を指定することが可能となる。この操作画面に基づき、操作者により設定されたリレーノードRNの設定情報を、UI19は、設定情報出力部186に出力する。
【0074】
設定情報出力部186は、UI19を介して操作者が指定したリレーノードRNの設定情報を受ける。設定情報出力部186は、この設定情報を制御部17に出力する。これにより、例えば、C−Planeを生成するために必要な情報が、制御部17からC−Plane伝送処理部124に送出される。
【0075】
UI19は、操作者がリレーノードシミュレーター1を操作するためのUser Interfaceである。UI19は表示部を備えており、表示制御部182から、測定条件やリレーノードRNの設定情報を指定するための操作画面を受けて、これを表示部に表示させる。また、UI19は、操作部を備えている。UI19は、この操作部を介して、操作者により指定されたリレーノードマーカーVRN及び端末マーカーVUEの位置を示す情報を受け、これを位置特定部181に出力する。また、UI19は、操作部を介して、操作者から入力されたリレーノードRNの設定情報を受け、これを設定情報出力部186に出力する。
【0076】
次に、図7を参照しながら、UI制御部18の一連の動作について、操作画面の表示と、その操作画面に基づき遅延量D1、ゲインGenb、及びレベルGrnが制御部17に出力されるまでの動作に着目して説明する。図7は、UI制御部18の一連の動作を示したフローチャートである。
【0077】
(ステップS11)
マーカー表示制御部1821は、UI19から操作画面の表示指示を受けると、まず、図5Aに示した、リレーノードマーカーVRNの位置を指定するための操作画面を生成する。具体的には、マーカー表示制御部1821は、座標系上の所定の位置に基地局マーカーVeNBを固定し、基地局マーカーVeNBを基準として、リレーノードマーカーVRNを一次元的に移動可能に構成された操作画面を生成する。表示制御部182は、マーカー表示制御部1821が生成したこの操作画面をUI19に出力する。これにより、操作者は、図5Aに示すような操作画面を操作しながら、リレーノードマーカーVRNの位置を指定することが可能となる。
【0078】
位置特定部181は、UI19から、操作者により指定されたリレーノードマーカーVRNの位置情報を受ける。位置特定部181は、リレーノードマーカーVRNの位置情報を表示制御部182に出力する。これを受けて、表示制御部182は、操作画面上のリレーノードマーカーVRNの表示位置を更新し、この操作画面をUI19上に表示させる。また、位置特定部181は、基地局マーカーVeNB及びリレーノードマーカーVRNそれぞれの位置情報を遅延量算出部183及びゲイン算出部184に出力する。
【0079】
(ステップS12)
遅延量算出部183は、位置特定部181から、基地局マーカーVeNB及びリレーノードマーカーVRNそれぞれの位置情報を受ける。遅延量算出部183は、これらの位置情報を基に、基地局マーカーVeNBとリレーノードマーカーVRNとの間の距離L1’を算出する。遅延量算出部183は、座標系上の各サンプリングポイントに対して、その位置と、基地局マーカーVeNB及びリレーノードマーカーVRNのそれぞれとの間の距離L0’及びL2’を算出する。遅延量算出部183は、算出された距離L1’、L0’、及びL2’を式1に適用して、距離L0’と距離L1’+L2’との差Ddiffを算出する
【0080】
遅延量算出部183は、サンプリングポイントごとに算出されたDdiffを、あらかじめ決められた、操作画面上の距離と実環境上の距離との間の縮尺を示す情報を基に実環境上の距離に換算する。遅延量算出部183は、算出された距離を信号の伝搬速度cで除算することにより、各サンプリングポイントにおける遅延量D1を算出し、これをそのサンプリングポイントの位置情報と関連付ける。遅延量算出部183は、遅延量D1を示す情報が関連付けられた各サンプリングポイントの位置情報をパターン表示制御部1822に出力する。
【0081】
また、ゲイン算出部184は、位置特定部181から、基地局マーカーVeNB及びリレーノードマーカーVRNそれぞれの位置情報を受ける。ゲイン算出部184は、これらの位置情報を基に、各サンプリングポイントに対して、その位置と、基地局マーカーVeNB及びリレーノードマーカーVRNのそれぞれとの間の距離L0’及びL2’を算出する。
【0082】
ゲイン算出部184は、サンプリングポイントごとに算出された距離L0’及びL2’を、あらかじめ決められた、操作画面上の距離と実環境上の距離との間の縮尺を示す情報を基に実環境上の距離L0及びL2に換算する。ゲイン算出部184は、算出された距離L0を基に、各サンプリングポイントにおけるRF信号E0’の減衰量Genb’を算出する。また、ゲイン算出部184は、算出された距離L2を基に、各サンプリングポイントにおけるRF信号E1’の減衰量Grn’を算出する。ゲイン算出部184は、サンプリングポイントごとに算出された減衰量Genb’及び減衰量Grn’を、そのサンプリングポイントの位置情報に関連付ける。ゲイン算出部184は、減衰量Genb’及び減衰量Grn’が関連付けられた各サンプリングポイントの位置情報をパターン表示制御部1822に出力する。
【0083】
(ステップS13)
マーカー表示制御部1821は、操作者の指示に基づき、リレーノードマーカーVRNの位置が特定されると、図5Bに示した、端末マーカーVUEの位置を指定するための操作画面を生成する。具体的には、マーカー表示制御部1821は、基地局マーカーVeNB及びリレーノードマーカーVRNに対して、端末マーカーVUEが二次元的に移動可能に構成された操作画面を生成する。表示制御部182は、マーカー表示制御部1821が生成したこの操作画面をUI19に出力する。
【0084】
パターン表示制御部1822は、基地局マーカーVeNB及びリレーノードマーカーVRNの位置の特定後に、遅延量算出部183から、遅延量D1を示す情報が関連付けられた各サンプリングポイントの位置情報を受ける。パターン表示制御部1822は、受けた各サンプリングポイントの位置情報を、座標系上の位置と対応付ける。これにより、座標系上の位置に対応するサンプリングポイントの位置情報に関連付けられた遅延量D1が、その座標系上の位置に関連付けられる。パターン表示制御部1822は、座標系上の各位置に関連付けられた遅延量D1を識別可能に表示させたパターンG11を生成する。図6Aは、このパターンG11の一例を示している。具体的には、パターン表示制御部1822は、遅延量D1の値が略同一のサンプリングポイントを特定し、それらを結んだ曲線を生成する。パターン表示制御部1822は、この曲線の生成に係る処理を、遅延量D1の値を所定の範囲で変化させながら、その値ごとに実行する。これにより、図6Aに示すようなパターンG11(即ち、等値線)が生成される。
【0085】
表示制御部182は、パターン表示制御部1822が生成したパターンG11を、マーカー表示制御部1821が生成した図5Bに示す操作画面に重畳表示させる。
【0086】
また、パターン表示制御部1822は、基地局マーカーVeNB及びリレーノードマーカーVRNの位置の特定後に、ゲイン算出部184から、減衰量Genb’及び減衰量Grn’が関連付けられた各サンプリングポイントの位置情報を受ける。パターン表示制御部1822は、受けた各サンプリングポイントの位置情報を、座標系上の位置と対応付ける。これにより、座標系上の位置に対応するサンプリングポイントの位置情報に関連付けられた減衰量Genb’及び減衰量Grn’が、その座標系上の位置に関連付けられる。パターン表示制御部1822は、座標系上の各位置に関連付けられた減衰量Genb’及び減衰量Grn’を識別可能に表示させたパターンG21及びG22を生成する。図6Bは、このパターンG21及びG22の一例を示している。例えば、パターンG21を生成する場合には、パターン表示制御部1822は、減衰量Genb’の値が略同一のサンプリングポイントを特定し、それらを結んだ曲線を生成する。パターン表示制御部1822は、この曲線の生成に係る処理を、減衰量Genb’の値を所定の範囲で変化させながら、その値ごとに実行する。これにより、図6Bに示すようなパターンG21(等値線)が生成される。同様に、パターンG22の場合には、パターン表示制御部1822は、減衰量Grn’の値を基にパターンG22を形成する各曲線を生成する。なお、減衰量Genb’及び減衰量Grn’は、対応する機器(基地局eNB及びリレーノードマーカーRN)から遠くなるにつれてその値は増加する。そのため、図6Bに示すように、パターンG21及びG22それぞれを形成する各曲線は、対応するマーカーを中心とした同心円となる。
【0087】
表示制御部182は、パターン表示制御部1822が生成したパターンG21及びG22を、マーカー表示制御部1821が生成した図5Bに示す操作画面に重畳表示させる。
【0088】
(ステップS14)
リレーノードマーカーVRNの位置の特定後に、位置特定部181は、UI19から、操作者により指定された端末マーカーVUEの位置を示す情報を受ける。例えば、図5Bの場合には、位置特定部181は、UI19から端末マーカーVUEの位置を示す座標P2(x1,y1)を位置情報として受ける。位置特定部181は、端末マーカーVUEの位置情報を表示制御部182に出力する。これを受けて、表示制御部182は、操作画面上の端末マーカーVUEの表示位置を更新し、この操作画面をUI19上に表示させる。また、位置特定部181は、端末マーカーVUEの位置情報を遅延量算出部183及びゲイン算出部184に出力する。
【0089】
(ステップS15)
遅延量算出部183は、位置特定部181から、端末マーカーVUEの位置情報を受ける。遅延量算出部183は、受けた位置情報に対応するサンプリングポイントを特定し、そのサンプリングポイントに関連付けられた遅延量D1を抽出する。
【0090】
また、基地局マーカーVeNB及びリレーノードマーカーVRNの位置の特定後に、ゲイン算出部184は、位置特定部181から、端末マーカーVUEの位置情報を受ける。ゲイン算出部184は、各サンプリングポイントに対して、その位置と端末マーカーVUEとの間の距離L3’を算出する。ゲイン算出部184は、サンプリングポイントごとに算出された距離L3’を、あらかじめ決められた、操作画面上の距離と実環境上の距離との間の縮尺を示す情報を基に実環境上の距離L3に換算する。ゲイン算出部184は、算出された距離L3を基に、各サンプリングポイントにおける移動体通信端末UEからの信号の減衰量Gue’を算出する。ゲイン算出部184は、サンプリングポイントごとに算出された減衰量Gue’を、そのサンプリングポイントの位置情報に関連付ける。ゲイン算出部184は、減衰量Gue’が関連付けられた各サンプリングポイントの位置情報をパターン表示制御部1822に出力する。
【0091】
パターン表示制御部1822は、端末マーカーVUEの位置の特定後に、ゲイン算出部184から、減衰量Gue’が関連付けられた各サンプリングポイントの位置情報を受ける。パターン表示制御部1822は、受けた各サンプリングポイントの位置情報を、座標系上の位置と対応付ける。これにより、座標系上の位置に対応するサンプリングポイントの位置情報に関連付けられた減衰量Gue’が、その座標系上の位置に関連付けられる。パターン表示制御部1822は、座標系上の各位置に関連付けられた減衰量Gue’を識別可能に表示させたパターンG31を生成する。図6Cは、このパターンG31の一例を示している。具体的には、パターン表示制御部1822は、減衰量Gue’の値が略同一のサンプリングポイントを特定し、それらを結んだ曲線を生成する。パターン表示制御部1822は、この曲線の生成に係る処理を、減衰量Gue’の値を所定の範囲で変化させながら、その値ごとに実行する。これにより、図6Cに示すようなパターンG31(即ち、等値線)が生成される。なお、減衰量Gue’は、移動体通信端末UEから遠くなるにつれてその値は増加する。そのため、図6Cに示すように、パターンG31を形成する各曲線は、端末マーカーVUEを中心とした同心円となる。
【0092】
表示制御部182は、パターン表示制御部1822が生成したパターンG31を、マーカー表示制御部1821が生成した図5Bに示す操作画面に重畳表示させる。
【0093】
また、ゲイン算出部184は、受けた端末マーカーVUEの位置情報に対応するサンプリングポイントを特定し、そのサンプリングポイントに関連付けられた減衰量Genb’及び減衰量Grn’を抽出する。
【0094】
(ステップS16)
なお、UI19を介して、操作者により、リレーノードマーカーVRNの位置の位置が変更された場合には(ステップS16、Y)、ステップS11以降の一連の処理が再度実行される。
【0095】
(ステップS17)
また、UI19を介して、操作者により、端末マーカーVUEの位置が変更された場合には(ステップS17、Y)、ステップS14以降の一連の処理が再度実行される。
【0096】
(ステップS18)
リレーノードマーカーVRN及び端末マーカーVUEの位置の位置が特定された場合には(ステップS16、N、かつ、ステップS17、N)、遅延量算出部183は、抽出された遅延量D1を制御部17に出力する。これにより、この遅延量D1が、制御部17を介して遅延処理部132に設定される。なお、遅延量算出部183は、端末マーカーVUEの位置情報を受けたときに、式1に基づき、その位置に対応する遅延量D1を算出し、これを制御部17に出力するように動作させてもよい。また、ゲイン算出部184は、抽出された減衰量Genb’及び減衰量Grn’を、ゲインGenb及びレベルGrnとして制御部17に出力する。これにより、このゲインGenb及びレベルGrnが、制御部17を介してゲイン調整部131及び14に設定される。以降は、これらの設定値に基づき試験が実行される。
【0097】
以上、本実施形態に係るリレーノードシミュレーター1は、基地局マーカーVeNB及びリレーノードマーカーVRNの位置に基づき、端末マーカーVUEの位置を変化させた場合における遅延量D1、ゲインGenb、及びレベルGrnを算出する。このリレーノードシミュレーター1は、これらの値が識別可能に提示されたパターンG11、G21、及びG22(またはG31)を操作画面上に表示させる。これにより、操作者は、端末マーカーVUEの位置を変化させた場合に、各位置における遅延量D1、ゲインGenb、及びレベルGrnの変化を容易に確認することが可能となる。
【0098】
また、このリレーノードシミュレーター1は、パターンG11、G21、及びG22(またはG31)に基づき指定された端末マーカーVUEの位置情報を受けて、試験に用いる遅延量D1、ゲインGenb、及びレベルGrnを決定する。これにより、操作者は、基地局マーカーVeNB、リレーノードマーカーVRN、及び端末マーカーVUEの位置関係を決めるだけで、この位置関係に応じた試験信号をこのリレーノードシミュレーター1で生成させることが可能となる。
【0099】
なお、本実施形態では、リレーノードRNからの信号と、基地局eNBからの信号とが時分割多重される構成を例として説明したが、前述のように、時分割多重を行わずに、基地局から継続して信号を出力し、基地局からの信号とリレーノードからの信号とに対してリソースエレメントの割当てを制御することで、これらの信号の干渉を防止する構成に対しても、本発明は適用できる。
【0100】
また、本実施形態では、eNB500からのRF信号E0’を受信部11で受けて、ベースバンド信号に変換する構成としていたが、受信部11を省略して、RF信号E0’に変換される前のベースバンド信号E0を直接受ける構成としてもよい。この場合には、例えばeNB500の代わりに、ベースバンド信号E0を出力可能な疑似基地局装置を本発明のリレーノードシミュレーターに接続することで、被試験端末に対して同様の試験を行うことが可能である。ここで、RF信号E0’に変換される前のベースバンド信号E0は、RF信号E0’に対応するベースバンド信号である。
【符号の説明】
【0101】
1 リレーノードシミュレーター
10 ダウンリンク処理部
11 受信部
12 リレーノード処理部
121 復調部
122 U−Plane再生処理部
123 U−Plane伝送処理部
124 C−Plane伝送処理部
125 変調部
131 ゲイン調整部
132 遅延処理部
14 ゲイン調整部
15 加算器
16 送信部
17 制御部
18 UI制御部
181 位置特定部
182 表示制御部
1821 マーカー表示制御部
1822 パターン表示制御部
1823 設定情報表示制御部
183 遅延量算出部
184 ゲイン算出部
185 設定情報記憶部
186 設定情報出力部
19 UI
20 アップリンク処理部
31 方向性結合器
32 方向性結合器
500 eNB
600 被試験端末
【特許請求の範囲】
【請求項1】
基地局からの第1のRF信号を中継して第2のRF信号として移動体通信端末へ送信するリレーノードを模擬し、前記第1のRF信号と前記第2のRF信号とが多重された信号を模擬した試験信号を試験対象の移動体通信端末に送信するリレーノードシミュレーターであって、
前記基地局に相当する基地局マーカー(VeNB)と、前記リレーノードに相当するリレーノードマーカー(VRN)と、前記移動体通信端末に相当する端末マーカー(VUE)とを所定の座標系に対応付けて、操作画面上に相対的に移動可能に表示させるマーカー表示制御部(1821)と、
前記座標系における、前記基地局マーカー、前記リレーノードマーカー、及び前記端末マーカーのそれぞれの位置を特定する位置特定部(181)と、
特定された前記基地局マーカーの位置と前記リレーノードマーカーの位置とに対して、前記端末マーカーの位置を変数として、前記移動体通信端末に到達するまでの前記第2のRF信号の遅延量を算出する遅延量算出部(183)と、
算出された前記遅延量に基づき、前記端末マーカーの位置に応じた前記遅延量の大きさを識別可能なパターン(G11)として前記操作画面上に表示させるパターン表示制御部(1822)と、
を備え、
前記パターン上で前記端末マーカーの位置が指定されたときに、前記第1のRF信号と当該指定位置に対応する前記遅延量が与えられた前記第2のRF信号とが多重された信号を模擬した前記試験信号を送信することを特徴とするリレーノードシミュレーター(1)。
【請求項2】
前記遅延量算出部は、前記座標系における、前記基地局マーカーと前記リレーノードマーカーとの間の距離に基づき前記遅延量を算出することを特徴とする請求項1に記載のリレーノードシミュレーター。
【請求項3】
前記パターン表示制御部は、前記パターンとして、算出された前記遅延量が略同一の前記位置を結んだ曲線を、前記遅延量ごとに前記操作画面上に表示させることを特徴とする請求項1または請求項2に記載のリレーノードシミュレーター。
【請求項4】
基地局からの第1のRF信号を中継して第2のRF信号として移動体通信端末へ送信するリレーノードを模擬し、前記第1のRF信号と前記第2のRF信号とが多重された信号を模擬した試験信号を試験対象の移動体通信端末に送信するリレーノードシミュレーターであって、
前記基地局に相当する基地局マーカー(VeNB)と、前記リレーノードに相当するリレーノードマーカー(VRN)と、前記移動体通信端末に相当する端末マーカー(VUE)とを所定の座標系に対応付けて、操作画面上に相対的に移動可能に表示させるマーカー表示制御部(1821)と、
前記座標系における、前記基地局マーカー、前記リレーノードマーカー、及び前記端末マーカーのそれぞれの位置を特定する位置特定部(181)と、
前記基地局と前記リレーノードとのそれぞれの機器からの信号について、対応するマーカーからの前記座標系における距離に応じた減衰量を算出するゲイン算出部(184)と、
算出された前記減衰量を基に、前記座標系の各位置における前記それぞれの機器からの信号の前記減衰量の大きさを識別可能なパターン(G21、G22)として前記操作画面上に表示させるパターン表示制御部(1822)と、
を備え、
前記パターン上で前記基地局マーカー、前記リレーノードマーカー、及び前記端末マーカーのそれぞれの位置が特定されたときに、当該特定位置に対応する前記基地局からの前記減衰量が与えられた前記第1のRF信号と当該特定位置に対応する前記リレーノードからの前記減衰量が与えられた前記第2のRF信号とが多重された信号を模擬した前記試験信号を送信することを特徴とするリレーノードシミュレーター(1)。
【請求項5】
基地局からの第1のRF信号を中継して第2のRF信号として移動体通信端末へ送信するリレーノードを模擬し、前記第1のRF信号と前記第2のRF信号とが多重された信号を模擬した試験信号を試験対象の移動体通信端末に送信するリレーノードシミュレーターであって、
前記基地局に相当する基地局マーカー(VeNB)と、前記リレーノードに相当するリレーノードマーカー(VRN)と、前記移動体通信端末に相当する端末マーカー(VUE)とを所定の座標系に対応付けて、操作画面上に相対的に移動可能に表示させるマーカー表示制御部(1821)と、
前記座標系における、前記基地局マーカー、前記リレーノードマーカー、及び前記端末マーカーのそれぞれの位置を特定する位置特定部(181)と、
前記移動体通信端末が受信する信号について、前記端末マーカーからの前記座標系における距離に応じた減衰量を算出するゲイン算出部(184)と、
算出された前記減衰量を基に、前記座標系の各位置における前記減衰量の大きさを識別可能なパターン(G31)として前記操作画面上に表示させるパターン表示制御部(182)と、
を備え、
前記パターン上で前記基地局マーカー、前記リレーノードマーカー、及び前記端末マーカーのそれぞれの位置が特定されたときに、前記特定位置に対応する前記基地局からの前記減衰量が与えられた前記第1のRF信号と当該特定位置に対応する前記リレーノードからの前記減衰量が与えられた前記第2のRF信号とが多重された信号を模擬した前記試験信号を送信することを特徴とするリレーノードシミュレーター(1)。
【請求項6】
基地局からの第1のRF信号を中継して第2のRF信号として移動体通信端末へ送信するリレーノードを模擬し、前記第1のRF信号と前記第2のRF信号とが多重された信号を模擬した試験信号を試験対象の移動体通信端末に送信する試験方法であって、
前記基地局に相当する基地局マーカー(VeNB)と、前記リレーノードに相当するリレーノードマーカー(VRN)と、前記移動体通信端末に相当する端末マーカー(VUE)とを所定の座標系に対応付けて、操作画面上に相対的に移動可能に表示させる画面表示ステップと、
前記座標系における、前記基地局マーカー、前記リレーノードマーカー、及び前記端末マーカーのそれぞれの位置を特定する位置特定ステップと、
特定された前記基地局マーカーの位置と前記リレーノードマーカーの位置とに対して、前記端末マーカーの位置を変数として、前記移動体通信端末に到達するまでの前記第2のRF信号の遅延量を算出する遅延量算出ステップと、
算出された前記遅延量に基づき、前記端末マーカーの位置に応じた前記遅延量の大きさを識別可能なパターン(G11)として前記操作画面上に表示させるパターン生成ステップと、
前記パターン上で前記端末マーカーの位置が指定されたときに、前記第1のRF信号と当該指定位置に対応する前記遅延量が与えられた前記第2のRF信号とが多重された信号を模擬した前記試験信号を送信する送信ステップと、
を備えたことを特徴とする試験方法。
【請求項7】
基地局からの第1のRF信号を中継して第2のRF信号として移動体通信端末へ送信するリレーノードを模擬し、前記第1のRF信号と前記第2のRF信号とが多重された信号を模擬した試験信号を試験対象の移動体通信端末に送信する試験方法であって、
前記基地局に相当する基地局マーカー(VeNB)と、前記リレーノードに相当するリレーノードマーカー(VRN)と、前記移動体通信端末に相当する端末マーカー(VUE)とを所定の座標系に対応付けて、操作画面上に相対的に移動可能に表示させる画面表示ステップと、
前記座標系における、前記基地局マーカー、前記リレーノードマーカー、及び前記端末マーカーのそれぞれの位置を特定する位置特定ステップと、
前記基地局と前記リレーノードとのそれぞれの機器からの信号について、対応するマーカーからの前記座標系における距離に応じた減衰量を算出するゲイン算出ステップと、
算出された前記減衰量を基に、前記座標系の各位置における前記それぞれの機器からの信号の前記減衰量の大きさを識別可能なパターン(G21、G22)として前記操作画面上に表示させるパターン生成ステップと、
前記パターン上で前記基地局マーカー、前記リレーノードマーカー、及び前記端末マーカーのそれぞれの位置が特定されたときに、当該特定位置に対応する前記基地局からの前記減衰量が与えられた前記第1のRF信号と当該特定位置に対応する前記リレーノードからの前記減衰量が与えられた前記第2のRF信号とが多重された信号を模擬した前記試験信号を送信する送信ステップと、
を備えたことを特徴とする試験方法。
【請求項8】
基地局からの第1のRF信号を中継して第2のRF信号として移動体通信端末へ送信するリレーノードを模擬し、前記第1のRF信号と前記第2のRF信号とが多重された信号を模擬した試験信号を試験対象の移動体通信端末に送信する試験方法であって、
前記基地局に相当する基地局マーカー(VeNB)と、前記リレーノードに相当するリレーノードマーカー(VRN)と、前記移動体通信端末に相当する端末マーカー(VUE)とを所定の座標系に対応付けて、操作画面上に相対的に移動可能に表示させる画面表示ステップと、
前記座標系における、前記基地局マーカー、前記リレーノードマーカー、及び前記端末マーカーのそれぞれの位置を特定する位置特定ステップと、
前記移動体通信端末が受信する信号について、前記端末マーカーからの前記座標系における距離に応じた減衰量を算出するゲイン算出ステップと、
算出された前記減衰量を基に、前記座標系の各位置における前記減衰量の大きさを識別可能なパターン(G31)として前記操作画面上に表示させるパターン生成ステップと、
前記パターン上で前記基地局マーカー、前記リレーノードマーカー、及び前記端末マーカーのそれぞれの位置が特定されたときに、前記特定位置に対応する前記基地局からの前記減衰量が与えられた前記第1のRF信号と当該特定位置に対応する前記リレーノードからの前記減衰量が与えられた前記第2のRF信号とが多重された信号を模擬した前記試験信号を送信する送信ステップと、
を備えたことを特徴とする試験方法。
【請求項1】
基地局からの第1のRF信号を中継して第2のRF信号として移動体通信端末へ送信するリレーノードを模擬し、前記第1のRF信号と前記第2のRF信号とが多重された信号を模擬した試験信号を試験対象の移動体通信端末に送信するリレーノードシミュレーターであって、
前記基地局に相当する基地局マーカー(VeNB)と、前記リレーノードに相当するリレーノードマーカー(VRN)と、前記移動体通信端末に相当する端末マーカー(VUE)とを所定の座標系に対応付けて、操作画面上に相対的に移動可能に表示させるマーカー表示制御部(1821)と、
前記座標系における、前記基地局マーカー、前記リレーノードマーカー、及び前記端末マーカーのそれぞれの位置を特定する位置特定部(181)と、
特定された前記基地局マーカーの位置と前記リレーノードマーカーの位置とに対して、前記端末マーカーの位置を変数として、前記移動体通信端末に到達するまでの前記第2のRF信号の遅延量を算出する遅延量算出部(183)と、
算出された前記遅延量に基づき、前記端末マーカーの位置に応じた前記遅延量の大きさを識別可能なパターン(G11)として前記操作画面上に表示させるパターン表示制御部(1822)と、
を備え、
前記パターン上で前記端末マーカーの位置が指定されたときに、前記第1のRF信号と当該指定位置に対応する前記遅延量が与えられた前記第2のRF信号とが多重された信号を模擬した前記試験信号を送信することを特徴とするリレーノードシミュレーター(1)。
【請求項2】
前記遅延量算出部は、前記座標系における、前記基地局マーカーと前記リレーノードマーカーとの間の距離に基づき前記遅延量を算出することを特徴とする請求項1に記載のリレーノードシミュレーター。
【請求項3】
前記パターン表示制御部は、前記パターンとして、算出された前記遅延量が略同一の前記位置を結んだ曲線を、前記遅延量ごとに前記操作画面上に表示させることを特徴とする請求項1または請求項2に記載のリレーノードシミュレーター。
【請求項4】
基地局からの第1のRF信号を中継して第2のRF信号として移動体通信端末へ送信するリレーノードを模擬し、前記第1のRF信号と前記第2のRF信号とが多重された信号を模擬した試験信号を試験対象の移動体通信端末に送信するリレーノードシミュレーターであって、
前記基地局に相当する基地局マーカー(VeNB)と、前記リレーノードに相当するリレーノードマーカー(VRN)と、前記移動体通信端末に相当する端末マーカー(VUE)とを所定の座標系に対応付けて、操作画面上に相対的に移動可能に表示させるマーカー表示制御部(1821)と、
前記座標系における、前記基地局マーカー、前記リレーノードマーカー、及び前記端末マーカーのそれぞれの位置を特定する位置特定部(181)と、
前記基地局と前記リレーノードとのそれぞれの機器からの信号について、対応するマーカーからの前記座標系における距離に応じた減衰量を算出するゲイン算出部(184)と、
算出された前記減衰量を基に、前記座標系の各位置における前記それぞれの機器からの信号の前記減衰量の大きさを識別可能なパターン(G21、G22)として前記操作画面上に表示させるパターン表示制御部(1822)と、
を備え、
前記パターン上で前記基地局マーカー、前記リレーノードマーカー、及び前記端末マーカーのそれぞれの位置が特定されたときに、当該特定位置に対応する前記基地局からの前記減衰量が与えられた前記第1のRF信号と当該特定位置に対応する前記リレーノードからの前記減衰量が与えられた前記第2のRF信号とが多重された信号を模擬した前記試験信号を送信することを特徴とするリレーノードシミュレーター(1)。
【請求項5】
基地局からの第1のRF信号を中継して第2のRF信号として移動体通信端末へ送信するリレーノードを模擬し、前記第1のRF信号と前記第2のRF信号とが多重された信号を模擬した試験信号を試験対象の移動体通信端末に送信するリレーノードシミュレーターであって、
前記基地局に相当する基地局マーカー(VeNB)と、前記リレーノードに相当するリレーノードマーカー(VRN)と、前記移動体通信端末に相当する端末マーカー(VUE)とを所定の座標系に対応付けて、操作画面上に相対的に移動可能に表示させるマーカー表示制御部(1821)と、
前記座標系における、前記基地局マーカー、前記リレーノードマーカー、及び前記端末マーカーのそれぞれの位置を特定する位置特定部(181)と、
前記移動体通信端末が受信する信号について、前記端末マーカーからの前記座標系における距離に応じた減衰量を算出するゲイン算出部(184)と、
算出された前記減衰量を基に、前記座標系の各位置における前記減衰量の大きさを識別可能なパターン(G31)として前記操作画面上に表示させるパターン表示制御部(182)と、
を備え、
前記パターン上で前記基地局マーカー、前記リレーノードマーカー、及び前記端末マーカーのそれぞれの位置が特定されたときに、前記特定位置に対応する前記基地局からの前記減衰量が与えられた前記第1のRF信号と当該特定位置に対応する前記リレーノードからの前記減衰量が与えられた前記第2のRF信号とが多重された信号を模擬した前記試験信号を送信することを特徴とするリレーノードシミュレーター(1)。
【請求項6】
基地局からの第1のRF信号を中継して第2のRF信号として移動体通信端末へ送信するリレーノードを模擬し、前記第1のRF信号と前記第2のRF信号とが多重された信号を模擬した試験信号を試験対象の移動体通信端末に送信する試験方法であって、
前記基地局に相当する基地局マーカー(VeNB)と、前記リレーノードに相当するリレーノードマーカー(VRN)と、前記移動体通信端末に相当する端末マーカー(VUE)とを所定の座標系に対応付けて、操作画面上に相対的に移動可能に表示させる画面表示ステップと、
前記座標系における、前記基地局マーカー、前記リレーノードマーカー、及び前記端末マーカーのそれぞれの位置を特定する位置特定ステップと、
特定された前記基地局マーカーの位置と前記リレーノードマーカーの位置とに対して、前記端末マーカーの位置を変数として、前記移動体通信端末に到達するまでの前記第2のRF信号の遅延量を算出する遅延量算出ステップと、
算出された前記遅延量に基づき、前記端末マーカーの位置に応じた前記遅延量の大きさを識別可能なパターン(G11)として前記操作画面上に表示させるパターン生成ステップと、
前記パターン上で前記端末マーカーの位置が指定されたときに、前記第1のRF信号と当該指定位置に対応する前記遅延量が与えられた前記第2のRF信号とが多重された信号を模擬した前記試験信号を送信する送信ステップと、
を備えたことを特徴とする試験方法。
【請求項7】
基地局からの第1のRF信号を中継して第2のRF信号として移動体通信端末へ送信するリレーノードを模擬し、前記第1のRF信号と前記第2のRF信号とが多重された信号を模擬した試験信号を試験対象の移動体通信端末に送信する試験方法であって、
前記基地局に相当する基地局マーカー(VeNB)と、前記リレーノードに相当するリレーノードマーカー(VRN)と、前記移動体通信端末に相当する端末マーカー(VUE)とを所定の座標系に対応付けて、操作画面上に相対的に移動可能に表示させる画面表示ステップと、
前記座標系における、前記基地局マーカー、前記リレーノードマーカー、及び前記端末マーカーのそれぞれの位置を特定する位置特定ステップと、
前記基地局と前記リレーノードとのそれぞれの機器からの信号について、対応するマーカーからの前記座標系における距離に応じた減衰量を算出するゲイン算出ステップと、
算出された前記減衰量を基に、前記座標系の各位置における前記それぞれの機器からの信号の前記減衰量の大きさを識別可能なパターン(G21、G22)として前記操作画面上に表示させるパターン生成ステップと、
前記パターン上で前記基地局マーカー、前記リレーノードマーカー、及び前記端末マーカーのそれぞれの位置が特定されたときに、当該特定位置に対応する前記基地局からの前記減衰量が与えられた前記第1のRF信号と当該特定位置に対応する前記リレーノードからの前記減衰量が与えられた前記第2のRF信号とが多重された信号を模擬した前記試験信号を送信する送信ステップと、
を備えたことを特徴とする試験方法。
【請求項8】
基地局からの第1のRF信号を中継して第2のRF信号として移動体通信端末へ送信するリレーノードを模擬し、前記第1のRF信号と前記第2のRF信号とが多重された信号を模擬した試験信号を試験対象の移動体通信端末に送信する試験方法であって、
前記基地局に相当する基地局マーカー(VeNB)と、前記リレーノードに相当するリレーノードマーカー(VRN)と、前記移動体通信端末に相当する端末マーカー(VUE)とを所定の座標系に対応付けて、操作画面上に相対的に移動可能に表示させる画面表示ステップと、
前記座標系における、前記基地局マーカー、前記リレーノードマーカー、及び前記端末マーカーのそれぞれの位置を特定する位置特定ステップと、
前記移動体通信端末が受信する信号について、前記端末マーカーからの前記座標系における距離に応じた減衰量を算出するゲイン算出ステップと、
算出された前記減衰量を基に、前記座標系の各位置における前記減衰量の大きさを識別可能なパターン(G31)として前記操作画面上に表示させるパターン生成ステップと、
前記パターン上で前記基地局マーカー、前記リレーノードマーカー、及び前記端末マーカーのそれぞれの位置が特定されたときに、前記特定位置に対応する前記基地局からの前記減衰量が与えられた前記第1のRF信号と当該特定位置に対応する前記リレーノードからの前記減衰量が与えられた前記第2のRF信号とが多重された信号を模擬した前記試験信号を送信する送信ステップと、
を備えたことを特徴とする試験方法。
【図1】

【図2A】
【図2B】
【図3】
【図4A】
【図4B】
【図4C】
【図5A】
【図5B】
【図6A】
【図6B】
【図6C】
【図7】
【図2A】
【図2B】
【図3】
【図4A】
【図4B】
【図4C】
【図5A】
【図5B】
【図6A】
【図6B】
【図6C】
【図7】
【公開番号】特開2013−81052(P2013−81052A)
【公開日】平成25年5月2日(2013.5.2)
【国際特許分類】
【出願番号】特願2011−219712(P2011−219712)
【出願日】平成23年10月4日(2011.10.4)
【出願人】(000000572)アンリツ株式会社 (838)
【Fターム(参考)】
【公開日】平成25年5月2日(2013.5.2)
【国際特許分類】
【出願日】平成23年10月4日(2011.10.4)
【出願人】(000000572)アンリツ株式会社 (838)
【Fターム(参考)】
[ Back to top ]