
レーザースキャンセンサ
【課題】通常姿勢の人間に対する検知性能を維持しつつ、さらに、小動物などの誤検知防止と匍匐侵入などをする人間の確実な検知との両立をも実現可能なレーザースキャンセンサを提供する。
【解決手段】レーザー距離計110と、スキャン機構120と、距離データ取得部130と、メモリ160と、取得された距離情報の中から人体に対応する可能性がある物体を検知するとともに、その物体の高さおよび幅をメモリ160に記憶されている設置状態情報にも基づいて算出し、算出された物体高さが所定高さ以上の場合はその物体の検知が第1所定時間以上継続したときに人体であると判定するとともに、算出された前記物体高さが前記所定高さ未満の場合はその物体の検知が前記第1所定時間よりも長い第2所定時間以上継続したときに人体であると判定する人体判定部140と、警告出力制御部150とを備える。
【解決手段】レーザー距離計110と、スキャン機構120と、距離データ取得部130と、メモリ160と、取得された距離情報の中から人体に対応する可能性がある物体を検知するとともに、その物体の高さおよび幅をメモリ160に記憶されている設置状態情報にも基づいて算出し、算出された物体高さが所定高さ以上の場合はその物体の検知が第1所定時間以上継続したときに人体であると判定するとともに、算出された前記物体高さが前記所定高さ未満の場合はその物体の検知が前記第1所定時間よりも長い第2所定時間以上継続したときに人体であると判定する人体判定部140と、警告出力制御部150とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、例えば、建物の敷地内への侵入者などを検知するレーザースキャンセンサに関し、特に、垂直または斜め下向きに設置された場合に小動物や匍匐姿勢での侵入者などを的確に区別して検知可能なレーザースキャンセンサに関する。
【背景技術】
【0002】
従来、レーザー光を光源としたレーザー距離計を使用して侵入者を検知するようにした「警備システム」が提案されている(例えば、特許文献1参照)。
【0003】
この「警備システム」は、光距離計の光を2次元スキャンさせるスキャン角度によって監視エリアを設定し、エリア内の侵入者を検知したとき、侵入者までの距離データおよび角度データを出力するセンサ部と、電動旋回台上に設置され、前記センサ部と連動して旋回する旋回カメラ部と、前記センサ部が前記距離データまたは前記角度データの変化を複数回連続して検出することにより侵入者の有無を検知するとともに、変化した前記センサ部からの前記距離データおよび前記角度データにより侵入者の位置を算出し、その位置データにより前記電動旋回台の前記旋回カメラ部を旋回させ、前記侵入者の画像データをモニタに表示させる機能を有する制御部と、を具備することを特徴とするものである。
【0004】
また、防犯装置や警備システムとはやや異なるものの、レーザー光を使用して歩行者などを正確に識別可能な「エリアセンサによる物体識別方法」も提案されている(例えば、特許文献2参照)。
【0005】
この「エリアセンサによる物体識別方法」は、歩行者を誘導する歩行エリアと該歩行エリアの周辺エリアとをカバーする検出範囲に、レーザー感知器によるエリアセンサによりパルスレーザー光を投射しながら走査して光の反射時間を計測し、物体が存在しない時の反射時間と物体が存在する時の反射時間との差を走査各点ごとに求めることにより物体の形状と、大きさと、走査ごとの物体の位置の変化によるベクトルとを演算し、その演算信号から、歩行エリアを誘導方向に移動する物体と、歩行エリアを横切る方向に移動する物体とを識別することを特徴とするものである。
【0006】
さらに、これらの従来技術の課題に鑑みて、実際の設置場所や警戒目的などに合わせて誤検知を極力防止できる適切な警戒領域を簡単に設定できるだけでなく、任意の警戒領域を容易に設定可能なレーザーエリアセンサを、本願の発明者は既に提案している(特許文献3参照)。
【0007】
この「レーザーエリアセンサ」は、レーザー光を出射してその方向に存在する物体からの反射光が戻ってくるまでの時間からその物体までの距離を測定するレーザー距離計と、このレーザー距離計による測定方向を変える走査機構部と、この走査機構部によって測定方向を変えながら前記レーザー距離計による測定を周期的に行うことにより、検知エリアを形成するとともにその検知エリア内における方向毎の距離情報を時系列で取得する距離情報取得部と、この距離情報取得部によって取得された距離情報の中から人体に対応すると推測される部分を抽出するとともに、そうして抽出された部分の時系列での移動状況に基づいて人体であるか否かを判定する人体判定部と、この人体判定部によって人体が存在していると判定された場合に人体検知信号を出力する人体検知信号出力部とを備えていることを特徴とするものである。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特許第3011121号公報
【特許文献2】特開2004−185363号公報
【特許文献3】特開2009−093428号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
例えば、特許文献3に記載されているような従来技術では、取得された距離情報における検知物体の高さや幅などから人体に対応すると推測される部分を抽出するとともに、そうして抽出された部分の検知持続時間や時系列での移動状況などに基づいて実際に人体であるか否かを確定する判定を行っていた。
【0010】
このような判定における検知高さや幅などの各種パラメータは、例えば、DIPスイッチや外部のパソコンなどによって予め設定されるので、判定処理で使用される人体の検知パラメータは固定値となる。
【0011】
この場合、地面から比較的近い(低い)ところで検知される小動物などと、地面から比較的高い(遠い)ところで検知される通常姿勢で歩行中などの人間とで、検知物体の認識時間に差がなければ、両方とも人体として検知することになっていた。
【0012】
小動物などを誤って検知しないようにするためには、例えば、地面から一定高さまでの物体を検知させないようにパラメータ設定することなどで解決していた。
【0013】
しかし、こうした一定高さ以下の不検知設定をすると、例えば、悪意のある人間による匍匐侵入などでも不検知状態となってしまう。つまり、一定高さ以下の不検知設定では、小動物などの誤検知防止と匍匐侵入などをする人間の確実な検知とを両立する設定を行うことが困難であった。
【0014】
従来技術のこのような課題に鑑み、本発明の目的は、通常姿勢の人間に対する検知性能を維持しつつ、さらに、小動物などの誤検知防止と匍匐侵入などをする人間の確実な検知との両立をも実現可能なレーザースキャンセンサを提供することである。
【課題を解決するための手段】
【0015】
上記目的を達成するため、本発明のレーザースキャンセンサは、レーザー光を出射してその方向に存在する物体からの反射光が戻ってくるまでの時間からその物体までの距離を測定するレーザー距離計と、このレーザー距離計による測定方向を変える走査機構部と、この走査機構部によって測定方向を変えながら前記レーザー距離計による測定を周期的に行うことにより、検知エリアを形成するとともにその検知エリア内における方向毎の距離情報を時系列で取得する距離情報取得部と、前記レーザー距離計の設置状態情報を記憶する記憶部と、この距離情報取得部によって取得された距離情報の中から人体に対応する可能性がある物体を検知するとともに、その物体の高さおよび幅を前記記憶部に記憶されている前記設置状態情報にも基づいて算出し、算出された前記物体高さが所定高さ以上の場合はその物体の検知が第1所定時間以上継続したときに人体であると判定するとともに、算出された前記物体高さが前記所定高さ未満の場合はその物体の検知が前記第1所定時間よりも長い第2所定時間以上継続したときに人体であると判定する判定部と、この判定部によって人体が存在していると判定された場合に警告信号を出力する警告信号出力部とを備えていることを特徴とする。
【0016】
ここで、前記記憶部に記憶されている前記設置状態情報とは、例えば、前記レーザー距離計の設置高さと測定向きが挙げられるが、これらに限らず、さらに他の情報を含んでもよい。また、外部操作によって少なくとも前記第1所定時間の設定を変更可能な設定変更部をさらに備えていてもよい。
【0017】
このような構成のレーザースキャンセンサによれば、通常姿勢の人間に対する検知性能を従来技術同等に維持しつつ、検知物体の高さが低くて通常歩行中や立ち止まっている人体ではない可能性が高い場合には、さらに検知物体の幅も考慮し、人体であるとの判定を確定するまでの時間をそれぞれ適切に設定できる。これにより、小動物などの誤検知防止と匍匐侵入などをする人間の確実な検知とが両立できるので、誤報や失報を極力発生させない最適な運用が可能となる。
【0018】
また、本発明のレーザースキャンセンサにおいて、前記判定部は、算出された前記物体高さが前記所定高さ未満の場合において、前記物体幅が所定幅以上のときには、その物体の検知が前記第1所定時間と同じまたは短い第3所定時間以上継続したときでも人体であると判定してもよい。
【0019】
このような構成のレーザースキャンセンサによれば、匍匐前進などによる侵入者と横になって転がりながら侵入する者とを区別して、それぞれ的確に検知することが可能となる。
【発明の効果】
【0020】
本発明のレーザースキャンセンサによれば、通常姿勢の人間に対する検知性能を従来技術同等に維持しつつ、小動物などの誤検知防止と匍匐侵入などをする人間の確実な検知とが両立できるので、誤報や失報を極力発生させない最適な運用が可能となる。
【図面の簡単な説明】
【0021】
【図1】本発明の一実施形態に係るレーザースキャンセンサ100の概略構成を示すブロック図である。
【図2】レーザースキャンセンサ100によって形成される検知エリアを示す概略平面図である。
【図3】通常歩行中の人間10が侵入する例を示す概略斜視図である。
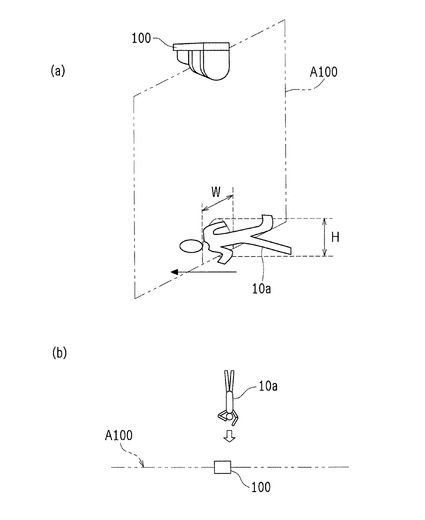
【図4】悪意のある人間10aが匍匐前進で侵入する例であり、図4(a)は概略斜視図、図4(b)は概略平面図である。
【図5】悪意のある人間10bが横になって転がりながら侵入する例であり、図5(a)は概略斜視図、図5(b)は概略平面図である。
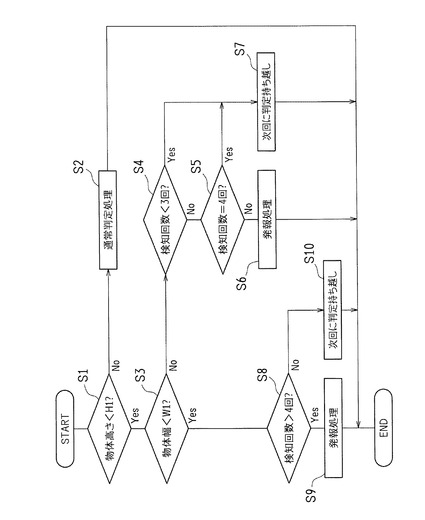
【図6】レーザースキャンセンサ100の人体判定部140において人体の存在を判定するための処理概略を示すフローチャートである。
【発明を実施するための形態】
【0022】
以下、図面を参照しながら本発明の実施形態を説明する。
【0023】
<実施形態の概略構成>
図1は、本発明の一実施形態に係るレーザースキャンセンサ100の概略構成を示すブロック図である。図2は、このレーザースキャンセンサ100によって形成される検知エリアを示す概略平面図である。なお、図2では隣接する距離測定方向の間隔を実際の間隔よりも遙かに広く描画してあるが、あくまでも説明の便宜のためである。図3は、通常歩行中の人間10が侵入する例を示す概略斜視図である。図4(a)および図4(b)は悪意のある人間10aが匍匐前進侵入する例であり、図4(a)は概略斜視図、図4(b)は概略平面図である。図5(a)および図5(b)は悪意のある人間10bが横になって転がりながら侵入する例であり、図5(a)は概略斜視図、図5(b)は概略平面図である。
【0024】
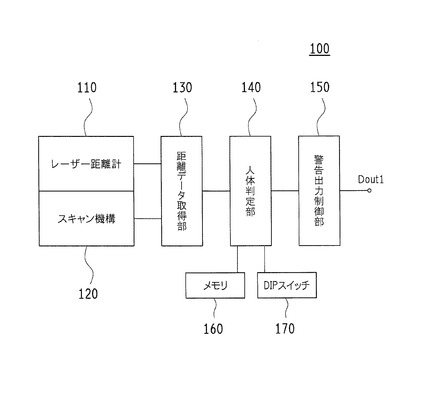
図1に示すように、レーザースキャンセンサ100は、レーザー距離計110と、スキャン機構120と、距離データ取得部130と、人体判定部140と、警告出力制御部150と、メモリ160と、DIPスイッチ170とを備えている。
【0025】
レーザー距離計110は、パルスレーザー光を出射し、その方向に存在する物体からの反射光が戻ってくるまでの微小な時間を精密に測定することによって、その物体までの距離を正確に測定する。レーザー距離計110におけるレーザー光の発光素子としては、例えば半導体レーザーダイオード(LD)などが挙げられる。受光素子としては、例えばアバランシェフォトダイオード(APD)などが挙げられる。発光素子の駆動制御や反射光が戻ってくるまでの時間測定などには専用のハードウェア回路などを設けることが望ましい。レーザー距離計の一般的な特徴としては、かなりの長距離まで精密な距離測定が可能であり、例えば、最大で数十m、場合によってはそれより遙かに長距離であっても測定可能であるが、このレーザー距離計110では最大検知距離を30mとしておく。
【0026】
スキャン機構120は、不図示のモータなどを内蔵することで回転可能としてあり、レーザー距離計110による距離の測定方向(角度)を変えられるようにレーザー距離計110の少なくとも一部と機械的に連結されている。例えば、レーザー距離計110のうちで光学系の部分のみを回転させるような構成が考えられるが、レーザー距離計110全体を回転させるような構成でもよいし、それ以外の構成でもかまわない。そして、スキャン機構120が一定速度で所定方向に回転することにより、それに連動してレーザー距離計110による距離の測定方向が変化する。
【0027】
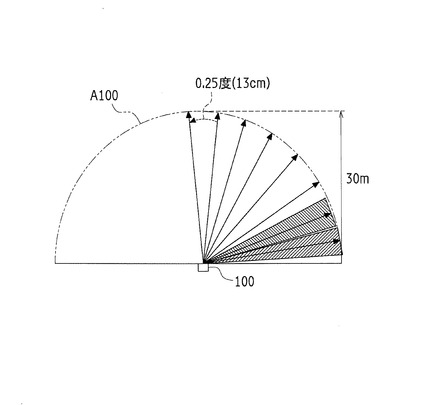
距離データ取得部130は、スキャン機構120によって測定方向を変えながらレーザー距離計110による測定を周期的に繰り返すことによって、図2に示すような検知エリアA100を形成するとともにその検知エリアA100内における所定角度間隔の方向毎の距離データを所定時間毎に時系列で取得する。
【0028】
例えば、スキャン機構120によるスキャン周期Tを50ms(1秒間に20回のスキャンを行う)、1回転の半分の180度の範囲でパルスレーザー光を発光して距離を測定するものとして、パルスレーザー光のパルス幅を34ns、その発光周期を34.7μsとすれば、180度の範囲で720回の距離測定ができる。この場合の距離測定の角度間隔は0.25度で、これは30m先でも図2に示すように約13cmに過ぎないから、検知エリアA100内の空間分解能としてはかなり高い。そのため、距離データ取得部130によって取得される距離データに基づいて検知物体の位置、大きさ(幅)、形状などをかなり正確に識別して人体か否かなどの判定をすることが可能であり、検知エリアA100内に複数の人体が存在する場合であってもそれらを個別に識別することも可能である。そして、そのような距離データがスキャン周期Tである50ms毎に得られることになる。なお、ここに示した数値はあくまでも例示に過ぎない。
【0029】
図2では、レーザー距離計110を水平方向に設置するとともに、スキャン機構120によって地面と平行に測定方向を変えながらレーザー距離計110による測定を周期的に繰り返す場合を示しているが、このような設置状態に限らない。例えば、地面から一定高さの位置に真下または斜め下に向けてレーザー距離計110を設置してもよい。この場合、そのような設置状態の情報、具体的には設置高さや測距向きなどをメモリ160に記憶させておけば、それらも併せて参照することで対象物の高さも算出することができる。
【0030】
人体判定部140は、まず、距離データ取得部130によって取得された距離データを解析して、その中から人体形状に対応すると推測される部分を抽出する。
【0031】
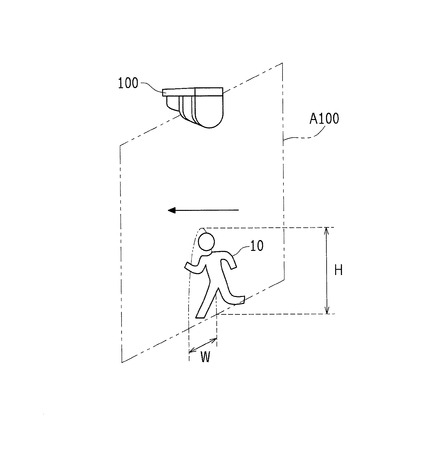
例えば、図3に示すように、人体10がレーザースキャンセンサ100側の方向を向いている場合、胴体部分の幅Wは数十cm程度であるから仮に40cmとすれば、30mの距離では約3個の隣接データに相当する。距離が短くなると隣接データ間の幅もそれに応じて狭くなり、例えば20mの距離では約8.8cmとなり、10mの距離では約4.4cmとなる。このとき、実際の同じ幅に対する隣接データの個数は逆に増えるので、例えば、10mの距離では40cmの幅が約9個の隣接データに相当する。人体がレーザースキャンセンサ100側の方向を向いておらず斜めや横向きであるときは、もちろん距離データに現れる幅は狭くなる。
【0032】
また、小さな子供でない限り、人体10の高さHは通常1m以上であろうと考えられる。検知物体の高さがこれより低ければ、たまたま迷い込んだ小動物などを検知した可能性が高い。
【0033】
もっとも、これらはあくまでも通常歩行中や立ち止まっている人体10のことであって、悪意のある人間10による匍匐侵入などでは状況は異なる。例えば、図4(a)および図4(b)に示すように、匍匐前進しているような侵入者10aがいた場合、検知物体の幅Wは概ね人体の幅に相当するが、検知物体の高さHは小動物並みに低いはずである。ただし、侵入には長時間を要すると考えられる。一方、図5(a)および図5(b)に示すように、横になって転がりながら(ローリング)侵入する者10bがいた場合には、検知物体の高さHが小動物並みに低いのは同様であるが、検知物体の幅Wは普通の人体の幅よりは遙かに大きくなるはずである。匍匐前進とは異なり、侵入にはそれほど時間を要さないこともあり得る。
【0034】
距離データは距離データ取得部130によって時系列で取得されているので、次に、距離データ中に人体である可能性があると判断された部分が、それ以降の距離データではどのように変化しているか、移動状況を把握する。また、移動の軌跡が著しく不連続であるときなども同様に人体ではない可能性が高いと判断できる。さらに、移動方向なども考慮することにより、警戒すべき侵入者であるのか、単に検知エリアA100の境界付近を歩行している通行人なのかなどの判別を行うこともできる。そして、以上の判断などを総合して、警戒すべき人体が存在しているか否かを判断する。
【0035】
なお、仮に30m以上の距離にある物体を検知したとしても、検知エリアA100外に相当するため、以上で述べた人体か否かの判断の対象としては扱わないものとしておくが、これに限るものではない。
【0036】
また、人体判定部140は、必要に応じて各種情報などをメモリ160に記憶するとともにメモリ160に記憶された各種情報などを参照する。また、人体判定部140によって通常姿勢の人体の判定を確定するまでの時間を、設置作業時などに必要に応じて外部からの手動操作で切り替えられるようにするためのDIPスイッチ170が設けられている。
【0037】
警告出力制御部150は、人体判定部140によって人体が存在していると判断された場合に警告信号Dout1を出力する。
【0038】
なお、距離データ取得部130、人体判定部140、警告出力制御部150、およびメモリ160などは、例えば、機器組み込み用のワンチップマイコンとそのソフトウェア処理によって構成することが好ましい。上述した各判別処理などは、パターンマッチングなどの手法によって実現できるので、比較的コストの安いワンチップマイコンを採用することもでき、レーザースキャンセンサ100全体としてのコストダウンに貢献することができる。ただし、必ずしもワンチップマイコンを使用しなくてもよい。
【0039】
<人体判定部140における人体判定処理概略>
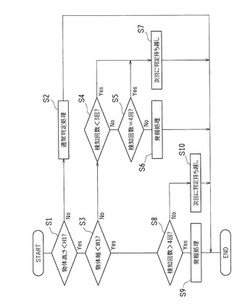
図6は、レーザースキャンセンサ100の人体判定部140において人体の存在を判定するための処理概略を示すフローチャートである。なお、以下で示す連続検知回数に関する閾値は、スキャン機構120によるスキャン周期Tが50msである場合を想定したものであり、本発明がこれらの数値に限定されないのはもちろんである。
【0040】
まず、検知物体が通常歩行中や立ち止まっている人体なのか否かによって具体的な判定処理内容を異ならせるため、検知物体の高さHと予め設定したパラメータである所定高さH1(例えば、1m)とを大小比較し(ステップS1)、物体高さHが所定高さH1未満であればステップS3に進み、そうでなければステップS2に進む。
【0041】
ステップS1からステップS2へ進んできた場合は、物体高さHが所定高さH1以上であるから、その検知物体が通常歩行中や立ち止まっている人体である可能性が高いので、通常の判定処理(ステップS2)を行った上で人体判定処理を終了する。なお、この通常判定処理では、その物体を連続して検知している時間(連続検知回数とスキャン周期Tとの積から算出可能)が比較的短くても(例えば、2〜3回。DIPスイッチ170によって設定変更可)人体と判定できる。
【0042】
一方、ステップS1からステップS3へ進んできた場合は、物体高さHが所定高さH1未満であるから、検知物体が小動物などかもしれないが、悪意のある人間10a、10bによる匍匐侵入などの可能性もある。そこで、その区別をするため、検知物体の幅Wと予め設定したパラメータである所定幅W1(胴体の横幅に相当。例えば、50cm)とを大小比較し(ステップS3)、物体幅Wが所定幅W1未満であればステップS8に進み、そうでなければステップS4に進む。
【0043】
ステップS3からステップS4へ進んできた場合は、物体高さHが所定高さH1未満であるものの物体幅Wが所定幅W1以上であるから、小動物などとは考えにくいが、例えば、図5(a)および図5(b)に示したようなローリングによる侵入者10bである可能性が考えられる。そこで、その物体を連続して検知した回数が3回未満かどうかを確認し(ステップS4)、3回未満であれば人体であると判定することを確定するのは次回以降に持ち越して(ステップS7)人体判定処理を終了し、そうでなければステップS5に進む。ステップS5では、さらに4回に等しいかどうかを確認し、4回に等しいのであればやはり人体であると判定することを確定するのは次回以降に持ち越して(ステップS7)人体判定処理を終了し、そうでなければ人体であると判定して発報処理(ステップS6)を行った後に人体判定処理を終了する。
【0044】
なお、このステップS5は必ずしも不可欠な条件分岐ではない。本来であれば、検知回数が1回目または2回目の場合は次回に判定が持ち越され(ステップS7)、3回目以上なら必ず発報処理(ステップS6)を行うことになるからである。しかしながら、3回目途中に何らかの異常などがあって処理が確定せずに4回目の判定になったときには、改めて次回に判定を持ち越すが(ステップS7)、もう一度戻ってきたとき(すなわち5回目以上になったとき)には、やはりローリングなどによる侵入者10bがいる可能性が高いと判断して発報処理を行う(ステップS6)ようにしている。
【0045】
一方、ステップS3からステップS8へ進んできた場合は、物体高さHが所定高さH1未満であって物体幅Wも所定幅W1未満であるから、例えば、図4(a)および図4(b)に示したような匍匐前進による侵入者10aである可能性が考えられる。そこで、その物体を連続して検知した回数が4回より大きいかどうかを確認し(ステップS8)、4回以下であれば人体であると判定することを確定するのは次回以降に持ち越して(ステップS10)人体判定処理を終了し、そうでなければ人体であると判定して発報処理(ステップS9)を行った後に人体判定処理を終了する。
【0046】
以上で説明した本実施形態の構成によれば、通常姿勢の人間10に対する検知性能を従来技術同等に維持しつつ、検知物体の高さHが低くて通常歩行中や立ち止まっている人体ではない可能性が高い場合には、さらに検知物体の幅Wも考慮し、人体であるとの判定を確定するまでの時間をそれぞれ適切に設定できる。
【0047】
これにより、小動物などの誤検知防止と、図4(a)〜図5(b)に示したような匍匐侵入などを行う悪意のある人間10a、10bの確実な検知とが両立できるので、誤報や失報を極力発生させない最適な運用が可能となる。また、小動物などとしての検知ロジックによって人体であるとの判定を確定させるまでの時間が長くなったことで、雨や地面の反射などにおける誤報防止性能を従来よりも向上させることができる。
【0048】
なお、本発明は、その主旨または主要な特徴から逸脱することなく、他のいろいろな形で実施することができる。そのため、上述の実施形態はあらゆる点で単なる例示にすぎず、限定的に解釈してはならない。本発明の範囲は特許請求の範囲によって示すものであって、明細書本文にはなんら拘束されない。さらに、特許請求の範囲の均等範囲に属する変形や変更は、全て本発明の範囲内のものである。
【符号の説明】
【0049】
10 人体(人間)
10a 侵入者
10b 侵入者
100 レーザースキャンセンサ
A100 検知エリア
110 レーザー距離計
120 スキャン機構
130 距離データ取得部
140 人体判定部
150 警告出力制御部
160 メモリ
170 DIPスイッチ
H 物体高さ
H1 所定高さ
W 物体幅
W1 所定幅
【技術分野】
【0001】
本発明は、例えば、建物の敷地内への侵入者などを検知するレーザースキャンセンサに関し、特に、垂直または斜め下向きに設置された場合に小動物や匍匐姿勢での侵入者などを的確に区別して検知可能なレーザースキャンセンサに関する。
【背景技術】
【0002】
従来、レーザー光を光源としたレーザー距離計を使用して侵入者を検知するようにした「警備システム」が提案されている(例えば、特許文献1参照)。
【0003】
この「警備システム」は、光距離計の光を2次元スキャンさせるスキャン角度によって監視エリアを設定し、エリア内の侵入者を検知したとき、侵入者までの距離データおよび角度データを出力するセンサ部と、電動旋回台上に設置され、前記センサ部と連動して旋回する旋回カメラ部と、前記センサ部が前記距離データまたは前記角度データの変化を複数回連続して検出することにより侵入者の有無を検知するとともに、変化した前記センサ部からの前記距離データおよび前記角度データにより侵入者の位置を算出し、その位置データにより前記電動旋回台の前記旋回カメラ部を旋回させ、前記侵入者の画像データをモニタに表示させる機能を有する制御部と、を具備することを特徴とするものである。
【0004】
また、防犯装置や警備システムとはやや異なるものの、レーザー光を使用して歩行者などを正確に識別可能な「エリアセンサによる物体識別方法」も提案されている(例えば、特許文献2参照)。
【0005】
この「エリアセンサによる物体識別方法」は、歩行者を誘導する歩行エリアと該歩行エリアの周辺エリアとをカバーする検出範囲に、レーザー感知器によるエリアセンサによりパルスレーザー光を投射しながら走査して光の反射時間を計測し、物体が存在しない時の反射時間と物体が存在する時の反射時間との差を走査各点ごとに求めることにより物体の形状と、大きさと、走査ごとの物体の位置の変化によるベクトルとを演算し、その演算信号から、歩行エリアを誘導方向に移動する物体と、歩行エリアを横切る方向に移動する物体とを識別することを特徴とするものである。
【0006】
さらに、これらの従来技術の課題に鑑みて、実際の設置場所や警戒目的などに合わせて誤検知を極力防止できる適切な警戒領域を簡単に設定できるだけでなく、任意の警戒領域を容易に設定可能なレーザーエリアセンサを、本願の発明者は既に提案している(特許文献3参照)。
【0007】
この「レーザーエリアセンサ」は、レーザー光を出射してその方向に存在する物体からの反射光が戻ってくるまでの時間からその物体までの距離を測定するレーザー距離計と、このレーザー距離計による測定方向を変える走査機構部と、この走査機構部によって測定方向を変えながら前記レーザー距離計による測定を周期的に行うことにより、検知エリアを形成するとともにその検知エリア内における方向毎の距離情報を時系列で取得する距離情報取得部と、この距離情報取得部によって取得された距離情報の中から人体に対応すると推測される部分を抽出するとともに、そうして抽出された部分の時系列での移動状況に基づいて人体であるか否かを判定する人体判定部と、この人体判定部によって人体が存在していると判定された場合に人体検知信号を出力する人体検知信号出力部とを備えていることを特徴とするものである。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特許第3011121号公報
【特許文献2】特開2004−185363号公報
【特許文献3】特開2009−093428号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
例えば、特許文献3に記載されているような従来技術では、取得された距離情報における検知物体の高さや幅などから人体に対応すると推測される部分を抽出するとともに、そうして抽出された部分の検知持続時間や時系列での移動状況などに基づいて実際に人体であるか否かを確定する判定を行っていた。
【0010】
このような判定における検知高さや幅などの各種パラメータは、例えば、DIPスイッチや外部のパソコンなどによって予め設定されるので、判定処理で使用される人体の検知パラメータは固定値となる。
【0011】
この場合、地面から比較的近い(低い)ところで検知される小動物などと、地面から比較的高い(遠い)ところで検知される通常姿勢で歩行中などの人間とで、検知物体の認識時間に差がなければ、両方とも人体として検知することになっていた。
【0012】
小動物などを誤って検知しないようにするためには、例えば、地面から一定高さまでの物体を検知させないようにパラメータ設定することなどで解決していた。
【0013】
しかし、こうした一定高さ以下の不検知設定をすると、例えば、悪意のある人間による匍匐侵入などでも不検知状態となってしまう。つまり、一定高さ以下の不検知設定では、小動物などの誤検知防止と匍匐侵入などをする人間の確実な検知とを両立する設定を行うことが困難であった。
【0014】
従来技術のこのような課題に鑑み、本発明の目的は、通常姿勢の人間に対する検知性能を維持しつつ、さらに、小動物などの誤検知防止と匍匐侵入などをする人間の確実な検知との両立をも実現可能なレーザースキャンセンサを提供することである。
【課題を解決するための手段】
【0015】
上記目的を達成するため、本発明のレーザースキャンセンサは、レーザー光を出射してその方向に存在する物体からの反射光が戻ってくるまでの時間からその物体までの距離を測定するレーザー距離計と、このレーザー距離計による測定方向を変える走査機構部と、この走査機構部によって測定方向を変えながら前記レーザー距離計による測定を周期的に行うことにより、検知エリアを形成するとともにその検知エリア内における方向毎の距離情報を時系列で取得する距離情報取得部と、前記レーザー距離計の設置状態情報を記憶する記憶部と、この距離情報取得部によって取得された距離情報の中から人体に対応する可能性がある物体を検知するとともに、その物体の高さおよび幅を前記記憶部に記憶されている前記設置状態情報にも基づいて算出し、算出された前記物体高さが所定高さ以上の場合はその物体の検知が第1所定時間以上継続したときに人体であると判定するとともに、算出された前記物体高さが前記所定高さ未満の場合はその物体の検知が前記第1所定時間よりも長い第2所定時間以上継続したときに人体であると判定する判定部と、この判定部によって人体が存在していると判定された場合に警告信号を出力する警告信号出力部とを備えていることを特徴とする。
【0016】
ここで、前記記憶部に記憶されている前記設置状態情報とは、例えば、前記レーザー距離計の設置高さと測定向きが挙げられるが、これらに限らず、さらに他の情報を含んでもよい。また、外部操作によって少なくとも前記第1所定時間の設定を変更可能な設定変更部をさらに備えていてもよい。
【0017】
このような構成のレーザースキャンセンサによれば、通常姿勢の人間に対する検知性能を従来技術同等に維持しつつ、検知物体の高さが低くて通常歩行中や立ち止まっている人体ではない可能性が高い場合には、さらに検知物体の幅も考慮し、人体であるとの判定を確定するまでの時間をそれぞれ適切に設定できる。これにより、小動物などの誤検知防止と匍匐侵入などをする人間の確実な検知とが両立できるので、誤報や失報を極力発生させない最適な運用が可能となる。
【0018】
また、本発明のレーザースキャンセンサにおいて、前記判定部は、算出された前記物体高さが前記所定高さ未満の場合において、前記物体幅が所定幅以上のときには、その物体の検知が前記第1所定時間と同じまたは短い第3所定時間以上継続したときでも人体であると判定してもよい。
【0019】
このような構成のレーザースキャンセンサによれば、匍匐前進などによる侵入者と横になって転がりながら侵入する者とを区別して、それぞれ的確に検知することが可能となる。
【発明の効果】
【0020】
本発明のレーザースキャンセンサによれば、通常姿勢の人間に対する検知性能を従来技術同等に維持しつつ、小動物などの誤検知防止と匍匐侵入などをする人間の確実な検知とが両立できるので、誤報や失報を極力発生させない最適な運用が可能となる。
【図面の簡単な説明】
【0021】
【図1】本発明の一実施形態に係るレーザースキャンセンサ100の概略構成を示すブロック図である。
【図2】レーザースキャンセンサ100によって形成される検知エリアを示す概略平面図である。
【図3】通常歩行中の人間10が侵入する例を示す概略斜視図である。
【図4】悪意のある人間10aが匍匐前進で侵入する例であり、図4(a)は概略斜視図、図4(b)は概略平面図である。
【図5】悪意のある人間10bが横になって転がりながら侵入する例であり、図5(a)は概略斜視図、図5(b)は概略平面図である。
【図6】レーザースキャンセンサ100の人体判定部140において人体の存在を判定するための処理概略を示すフローチャートである。
【発明を実施するための形態】
【0022】
以下、図面を参照しながら本発明の実施形態を説明する。
【0023】
<実施形態の概略構成>
図1は、本発明の一実施形態に係るレーザースキャンセンサ100の概略構成を示すブロック図である。図2は、このレーザースキャンセンサ100によって形成される検知エリアを示す概略平面図である。なお、図2では隣接する距離測定方向の間隔を実際の間隔よりも遙かに広く描画してあるが、あくまでも説明の便宜のためである。図3は、通常歩行中の人間10が侵入する例を示す概略斜視図である。図4(a)および図4(b)は悪意のある人間10aが匍匐前進侵入する例であり、図4(a)は概略斜視図、図4(b)は概略平面図である。図5(a)および図5(b)は悪意のある人間10bが横になって転がりながら侵入する例であり、図5(a)は概略斜視図、図5(b)は概略平面図である。
【0024】
図1に示すように、レーザースキャンセンサ100は、レーザー距離計110と、スキャン機構120と、距離データ取得部130と、人体判定部140と、警告出力制御部150と、メモリ160と、DIPスイッチ170とを備えている。
【0025】
レーザー距離計110は、パルスレーザー光を出射し、その方向に存在する物体からの反射光が戻ってくるまでの微小な時間を精密に測定することによって、その物体までの距離を正確に測定する。レーザー距離計110におけるレーザー光の発光素子としては、例えば半導体レーザーダイオード(LD)などが挙げられる。受光素子としては、例えばアバランシェフォトダイオード(APD)などが挙げられる。発光素子の駆動制御や反射光が戻ってくるまでの時間測定などには専用のハードウェア回路などを設けることが望ましい。レーザー距離計の一般的な特徴としては、かなりの長距離まで精密な距離測定が可能であり、例えば、最大で数十m、場合によってはそれより遙かに長距離であっても測定可能であるが、このレーザー距離計110では最大検知距離を30mとしておく。
【0026】
スキャン機構120は、不図示のモータなどを内蔵することで回転可能としてあり、レーザー距離計110による距離の測定方向(角度)を変えられるようにレーザー距離計110の少なくとも一部と機械的に連結されている。例えば、レーザー距離計110のうちで光学系の部分のみを回転させるような構成が考えられるが、レーザー距離計110全体を回転させるような構成でもよいし、それ以外の構成でもかまわない。そして、スキャン機構120が一定速度で所定方向に回転することにより、それに連動してレーザー距離計110による距離の測定方向が変化する。
【0027】
距離データ取得部130は、スキャン機構120によって測定方向を変えながらレーザー距離計110による測定を周期的に繰り返すことによって、図2に示すような検知エリアA100を形成するとともにその検知エリアA100内における所定角度間隔の方向毎の距離データを所定時間毎に時系列で取得する。
【0028】
例えば、スキャン機構120によるスキャン周期Tを50ms(1秒間に20回のスキャンを行う)、1回転の半分の180度の範囲でパルスレーザー光を発光して距離を測定するものとして、パルスレーザー光のパルス幅を34ns、その発光周期を34.7μsとすれば、180度の範囲で720回の距離測定ができる。この場合の距離測定の角度間隔は0.25度で、これは30m先でも図2に示すように約13cmに過ぎないから、検知エリアA100内の空間分解能としてはかなり高い。そのため、距離データ取得部130によって取得される距離データに基づいて検知物体の位置、大きさ(幅)、形状などをかなり正確に識別して人体か否かなどの判定をすることが可能であり、検知エリアA100内に複数の人体が存在する場合であってもそれらを個別に識別することも可能である。そして、そのような距離データがスキャン周期Tである50ms毎に得られることになる。なお、ここに示した数値はあくまでも例示に過ぎない。
【0029】
図2では、レーザー距離計110を水平方向に設置するとともに、スキャン機構120によって地面と平行に測定方向を変えながらレーザー距離計110による測定を周期的に繰り返す場合を示しているが、このような設置状態に限らない。例えば、地面から一定高さの位置に真下または斜め下に向けてレーザー距離計110を設置してもよい。この場合、そのような設置状態の情報、具体的には設置高さや測距向きなどをメモリ160に記憶させておけば、それらも併せて参照することで対象物の高さも算出することができる。
【0030】
人体判定部140は、まず、距離データ取得部130によって取得された距離データを解析して、その中から人体形状に対応すると推測される部分を抽出する。
【0031】
例えば、図3に示すように、人体10がレーザースキャンセンサ100側の方向を向いている場合、胴体部分の幅Wは数十cm程度であるから仮に40cmとすれば、30mの距離では約3個の隣接データに相当する。距離が短くなると隣接データ間の幅もそれに応じて狭くなり、例えば20mの距離では約8.8cmとなり、10mの距離では約4.4cmとなる。このとき、実際の同じ幅に対する隣接データの個数は逆に増えるので、例えば、10mの距離では40cmの幅が約9個の隣接データに相当する。人体がレーザースキャンセンサ100側の方向を向いておらず斜めや横向きであるときは、もちろん距離データに現れる幅は狭くなる。
【0032】
また、小さな子供でない限り、人体10の高さHは通常1m以上であろうと考えられる。検知物体の高さがこれより低ければ、たまたま迷い込んだ小動物などを検知した可能性が高い。
【0033】
もっとも、これらはあくまでも通常歩行中や立ち止まっている人体10のことであって、悪意のある人間10による匍匐侵入などでは状況は異なる。例えば、図4(a)および図4(b)に示すように、匍匐前進しているような侵入者10aがいた場合、検知物体の幅Wは概ね人体の幅に相当するが、検知物体の高さHは小動物並みに低いはずである。ただし、侵入には長時間を要すると考えられる。一方、図5(a)および図5(b)に示すように、横になって転がりながら(ローリング)侵入する者10bがいた場合には、検知物体の高さHが小動物並みに低いのは同様であるが、検知物体の幅Wは普通の人体の幅よりは遙かに大きくなるはずである。匍匐前進とは異なり、侵入にはそれほど時間を要さないこともあり得る。
【0034】
距離データは距離データ取得部130によって時系列で取得されているので、次に、距離データ中に人体である可能性があると判断された部分が、それ以降の距離データではどのように変化しているか、移動状況を把握する。また、移動の軌跡が著しく不連続であるときなども同様に人体ではない可能性が高いと判断できる。さらに、移動方向なども考慮することにより、警戒すべき侵入者であるのか、単に検知エリアA100の境界付近を歩行している通行人なのかなどの判別を行うこともできる。そして、以上の判断などを総合して、警戒すべき人体が存在しているか否かを判断する。
【0035】
なお、仮に30m以上の距離にある物体を検知したとしても、検知エリアA100外に相当するため、以上で述べた人体か否かの判断の対象としては扱わないものとしておくが、これに限るものではない。
【0036】
また、人体判定部140は、必要に応じて各種情報などをメモリ160に記憶するとともにメモリ160に記憶された各種情報などを参照する。また、人体判定部140によって通常姿勢の人体の判定を確定するまでの時間を、設置作業時などに必要に応じて外部からの手動操作で切り替えられるようにするためのDIPスイッチ170が設けられている。
【0037】
警告出力制御部150は、人体判定部140によって人体が存在していると判断された場合に警告信号Dout1を出力する。
【0038】
なお、距離データ取得部130、人体判定部140、警告出力制御部150、およびメモリ160などは、例えば、機器組み込み用のワンチップマイコンとそのソフトウェア処理によって構成することが好ましい。上述した各判別処理などは、パターンマッチングなどの手法によって実現できるので、比較的コストの安いワンチップマイコンを採用することもでき、レーザースキャンセンサ100全体としてのコストダウンに貢献することができる。ただし、必ずしもワンチップマイコンを使用しなくてもよい。
【0039】
<人体判定部140における人体判定処理概略>
図6は、レーザースキャンセンサ100の人体判定部140において人体の存在を判定するための処理概略を示すフローチャートである。なお、以下で示す連続検知回数に関する閾値は、スキャン機構120によるスキャン周期Tが50msである場合を想定したものであり、本発明がこれらの数値に限定されないのはもちろんである。
【0040】
まず、検知物体が通常歩行中や立ち止まっている人体なのか否かによって具体的な判定処理内容を異ならせるため、検知物体の高さHと予め設定したパラメータである所定高さH1(例えば、1m)とを大小比較し(ステップS1)、物体高さHが所定高さH1未満であればステップS3に進み、そうでなければステップS2に進む。
【0041】
ステップS1からステップS2へ進んできた場合は、物体高さHが所定高さH1以上であるから、その検知物体が通常歩行中や立ち止まっている人体である可能性が高いので、通常の判定処理(ステップS2)を行った上で人体判定処理を終了する。なお、この通常判定処理では、その物体を連続して検知している時間(連続検知回数とスキャン周期Tとの積から算出可能)が比較的短くても(例えば、2〜3回。DIPスイッチ170によって設定変更可)人体と判定できる。
【0042】
一方、ステップS1からステップS3へ進んできた場合は、物体高さHが所定高さH1未満であるから、検知物体が小動物などかもしれないが、悪意のある人間10a、10bによる匍匐侵入などの可能性もある。そこで、その区別をするため、検知物体の幅Wと予め設定したパラメータである所定幅W1(胴体の横幅に相当。例えば、50cm)とを大小比較し(ステップS3)、物体幅Wが所定幅W1未満であればステップS8に進み、そうでなければステップS4に進む。
【0043】
ステップS3からステップS4へ進んできた場合は、物体高さHが所定高さH1未満であるものの物体幅Wが所定幅W1以上であるから、小動物などとは考えにくいが、例えば、図5(a)および図5(b)に示したようなローリングによる侵入者10bである可能性が考えられる。そこで、その物体を連続して検知した回数が3回未満かどうかを確認し(ステップS4)、3回未満であれば人体であると判定することを確定するのは次回以降に持ち越して(ステップS7)人体判定処理を終了し、そうでなければステップS5に進む。ステップS5では、さらに4回に等しいかどうかを確認し、4回に等しいのであればやはり人体であると判定することを確定するのは次回以降に持ち越して(ステップS7)人体判定処理を終了し、そうでなければ人体であると判定して発報処理(ステップS6)を行った後に人体判定処理を終了する。
【0044】
なお、このステップS5は必ずしも不可欠な条件分岐ではない。本来であれば、検知回数が1回目または2回目の場合は次回に判定が持ち越され(ステップS7)、3回目以上なら必ず発報処理(ステップS6)を行うことになるからである。しかしながら、3回目途中に何らかの異常などがあって処理が確定せずに4回目の判定になったときには、改めて次回に判定を持ち越すが(ステップS7)、もう一度戻ってきたとき(すなわち5回目以上になったとき)には、やはりローリングなどによる侵入者10bがいる可能性が高いと判断して発報処理を行う(ステップS6)ようにしている。
【0045】
一方、ステップS3からステップS8へ進んできた場合は、物体高さHが所定高さH1未満であって物体幅Wも所定幅W1未満であるから、例えば、図4(a)および図4(b)に示したような匍匐前進による侵入者10aである可能性が考えられる。そこで、その物体を連続して検知した回数が4回より大きいかどうかを確認し(ステップS8)、4回以下であれば人体であると判定することを確定するのは次回以降に持ち越して(ステップS10)人体判定処理を終了し、そうでなければ人体であると判定して発報処理(ステップS9)を行った後に人体判定処理を終了する。
【0046】
以上で説明した本実施形態の構成によれば、通常姿勢の人間10に対する検知性能を従来技術同等に維持しつつ、検知物体の高さHが低くて通常歩行中や立ち止まっている人体ではない可能性が高い場合には、さらに検知物体の幅Wも考慮し、人体であるとの判定を確定するまでの時間をそれぞれ適切に設定できる。
【0047】
これにより、小動物などの誤検知防止と、図4(a)〜図5(b)に示したような匍匐侵入などを行う悪意のある人間10a、10bの確実な検知とが両立できるので、誤報や失報を極力発生させない最適な運用が可能となる。また、小動物などとしての検知ロジックによって人体であるとの判定を確定させるまでの時間が長くなったことで、雨や地面の反射などにおける誤報防止性能を従来よりも向上させることができる。
【0048】
なお、本発明は、その主旨または主要な特徴から逸脱することなく、他のいろいろな形で実施することができる。そのため、上述の実施形態はあらゆる点で単なる例示にすぎず、限定的に解釈してはならない。本発明の範囲は特許請求の範囲によって示すものであって、明細書本文にはなんら拘束されない。さらに、特許請求の範囲の均等範囲に属する変形や変更は、全て本発明の範囲内のものである。
【符号の説明】
【0049】
10 人体(人間)
10a 侵入者
10b 侵入者
100 レーザースキャンセンサ
A100 検知エリア
110 レーザー距離計
120 スキャン機構
130 距離データ取得部
140 人体判定部
150 警告出力制御部
160 メモリ
170 DIPスイッチ
H 物体高さ
H1 所定高さ
W 物体幅
W1 所定幅
【特許請求の範囲】
【請求項1】
レーザー光を出射してその方向に存在する物体からの反射光が戻ってくるまでの時間からその物体までの距離を測定するレーザー距離計と、
このレーザー距離計による測定方向を変える走査機構部と、
この走査機構部によって測定方向を変えながら前記レーザー距離計による測定を周期的に行うことにより、検知エリアを形成するとともにその検知エリア内における方向毎の距離情報を時系列で取得する距離情報取得部と、
前記レーザー距離計の設置状態情報を記憶する記憶部と、
この距離情報取得部によって取得された距離情報の中から人体に対応する可能性がある物体を検知するとともに、その物体の高さおよび幅を前記記憶部に記憶されている前記設置状態情報にも基づいて算出し、算出された前記物体高さが所定高さ以上の場合はその物体の検知が第1所定時間以上継続したときに人体であると判定するとともに、算出された前記物体高さが前記所定高さ未満の場合はその物体の検知が前記第1所定時間よりも長い第2所定時間以上継続したときに人体であると判定する判定部と、
この判定部によって人体が存在していると判定された場合に警告信号を出力する警告信号出力部と
を備えていることを特徴とするレーザースキャンセンサ。
【請求項2】
請求項1に記載のレーザースキャンセンサにおいて、
前記判定部は、算出された前記物体高さが前記所定高さ未満の場合において、前記物体幅が所定幅以上のときには、その物体の検知が前記第1所定時間と同じまたは短い第3所定時間以上継続したときでも人体であると判定することを特徴とするレーザースキャンセンサ。
【請求項3】
請求項1または2に記載のレーザースキャンセンサにおいて、
前記記憶部に記憶されている前記設置状態情報とは、少なくとも前記レーザー距離計の設置高さと測定向きとを含むことを特徴とするレーザースキャンセンサ。
【請求項4】
請求項1〜3のいずれか1項に記載のレーザースキャンセンサにおいて、
外部操作によって少なくとも前記第1所定時間の設定を変更可能な設定変更部をさらに備えることを特徴とするレーザースキャンセンサ。
【請求項1】
レーザー光を出射してその方向に存在する物体からの反射光が戻ってくるまでの時間からその物体までの距離を測定するレーザー距離計と、
このレーザー距離計による測定方向を変える走査機構部と、
この走査機構部によって測定方向を変えながら前記レーザー距離計による測定を周期的に行うことにより、検知エリアを形成するとともにその検知エリア内における方向毎の距離情報を時系列で取得する距離情報取得部と、
前記レーザー距離計の設置状態情報を記憶する記憶部と、
この距離情報取得部によって取得された距離情報の中から人体に対応する可能性がある物体を検知するとともに、その物体の高さおよび幅を前記記憶部に記憶されている前記設置状態情報にも基づいて算出し、算出された前記物体高さが所定高さ以上の場合はその物体の検知が第1所定時間以上継続したときに人体であると判定するとともに、算出された前記物体高さが前記所定高さ未満の場合はその物体の検知が前記第1所定時間よりも長い第2所定時間以上継続したときに人体であると判定する判定部と、
この判定部によって人体が存在していると判定された場合に警告信号を出力する警告信号出力部と
を備えていることを特徴とするレーザースキャンセンサ。
【請求項2】
請求項1に記載のレーザースキャンセンサにおいて、
前記判定部は、算出された前記物体高さが前記所定高さ未満の場合において、前記物体幅が所定幅以上のときには、その物体の検知が前記第1所定時間と同じまたは短い第3所定時間以上継続したときでも人体であると判定することを特徴とするレーザースキャンセンサ。
【請求項3】
請求項1または2に記載のレーザースキャンセンサにおいて、
前記記憶部に記憶されている前記設置状態情報とは、少なくとも前記レーザー距離計の設置高さと測定向きとを含むことを特徴とするレーザースキャンセンサ。
【請求項4】
請求項1〜3のいずれか1項に記載のレーザースキャンセンサにおいて、
外部操作によって少なくとも前記第1所定時間の設定を変更可能な設定変更部をさらに備えることを特徴とするレーザースキャンセンサ。
【図1】


【図2】
【図3】
【図4】
【図5】

【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−61187(P2013−61187A)
【公開日】平成25年4月4日(2013.4.4)
【国際特許分類】
【出願番号】特願2011−198707(P2011−198707)
【出願日】平成23年9月12日(2011.9.12)
【特許番号】特許第5163971号(P5163971)
【特許公報発行日】平成25年3月13日(2013.3.13)
【出願人】(000103736)オプテックス株式会社 (116)
【Fターム(参考)】
【公開日】平成25年4月4日(2013.4.4)
【国際特許分類】
【出願日】平成23年9月12日(2011.9.12)
【特許番号】特許第5163971号(P5163971)
【特許公報発行日】平成25年3月13日(2013.3.13)
【出願人】(000103736)オプテックス株式会社 (116)
【Fターム(参考)】
[ Back to top ]