
ロボットハンドおよびロボットハンドシステム
【課題】簡単な構造でハンド先端部の取り外しを行う。
【解決手段】ハンド先端部4をハンド本体部3から取り外す際には、治具8の治具ピン83が、ハンド先端部4の貫通孔42の下部開口から挿入されて着脱機構35のピストン352に当接する。その後、ハンド本体部3のエア溜まり311が大気開放され、圧縮エアによるピストン352への圧力が解放される。そして、治具8のバネ84の復元力により、治具ピン83がピストン352を押圧しつつ治具本体81から突出する方向へと移動する。これにより、複数のボール353が着脱凸部351の孔内部へと戻って貫通孔42との係合が解除される。その結果、ハンド本体部3とハンド先端部4との固定が解除される。このように、ロボットハンド2では、簡単な構造でハンド先端部4の取り外しを行うことができるため、組立ロボットの製造コストを低減することができる。
【解決手段】ハンド先端部4をハンド本体部3から取り外す際には、治具8の治具ピン83が、ハンド先端部4の貫通孔42の下部開口から挿入されて着脱機構35のピストン352に当接する。その後、ハンド本体部3のエア溜まり311が大気開放され、圧縮エアによるピストン352への圧力が解放される。そして、治具8のバネ84の復元力により、治具ピン83がピストン352を押圧しつつ治具本体81から突出する方向へと移動する。これにより、複数のボール353が着脱凸部351の孔内部へと戻って貫通孔42との係合が解除される。その結果、ハンド本体部3とハンド先端部4との固定が解除される。このように、ロボットハンド2では、簡単な構造でハンド先端部4の取り外しを行うことができるため、組立ロボットの製造コストを低減することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、組立ロボットのロボットアームの先端に設けられるロボットハンド、および、当該ロボットハンドを備えるロボットハンドシステムに関する。
【背景技術】
【0002】
従来より、自動組立ライン等において組立ロボットが用いられており、組立ロボットでは、ワークに対して様々な操作を行うロボットハンドがロボットアームに接続されることにより3次元的に移動可能とされる。また、ワークを把持するロボットハンドでは、圧縮エアを用いた把持部の駆動により、ワークの把持および解放が行われる。
【0003】
このような組立ロボットでは、様々なワークに対応するために、ロボットハンドまたはロボットハンドの一部を交換することが行われている。例えば、特許文献1では、エア駆動によりアームに対するロボットハンドの着脱を行うハンド着脱手段を備え、ロボットハンドの自動交換を行うロボットが開示されている。
【0004】
また、特許文献2のロボットハンドでは、エアを用いた第1駆動機構によりチャックが駆動されて被把持部が把持されるとともに、当該エアを用いた第2駆動機構により着脱手段が駆動されてハンド本体部に対するハンド先端部の着脱が行われる。具体的には、ハンド本体部において、着脱手段のピストンをエアにより下向きに移動させて可動球を外側に突出させることにより、ハンド本体部とハンド先端部とが結合され、ピストンに対するエアの圧力を抜くことにより、ハンド先端部がハンド本体部から分離する。
【0005】
特許文献3の自動工具交換装置では、ロボットハンドのアーム等に連結される固定プレートと、工具を備えた工具プレートとが着脱可能に結合される。当該自動工具交換装置では、固定プレートが、軸線方向に進退可能なアクチュエータ、および、アクチュエータに外接して半径方向に移動可能なロックピンを備える。また、工具プレートは、固定プレートの接合端側が挿入可能な環状体であり、内周壁には、固定プレートのロックピンが半径方向に突出した際にその先端が嵌り込むロック孔が設けられる。自動工具交換装置では、アクチュエータが収容されるシリンダボアの上部に設けられた1つのポートから作動流体が供給され、アクチュエータが下降してロックピンが半径方向に突出することにより、工具プレートが固定プレートに装着される。また、シリンダボアの下部に設けられた他のポートから作動流体が供給され、アクチュエータが上昇することにより、ロックピンが半径方向の内側に移動し、工具プレートが固定プレートから取り外される。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2000−354919号公報
【特許文献2】特開2010−149223号公報
【特許文献3】実開平6−61486号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
ところで、特許文献3のような自動工具交換装置では、工具プレートの装着および取り外しのための作動流体の配管、および、作動流体の流れを制御する制御部がそれぞれ必要となり、装置構造が複雑となってしまう。
【0008】
本発明は、上記課題に鑑みなされたものであり、簡単な構造でハンド先端部の取り外しを行うことを目的としている。
【課題を解決するための手段】
【0009】
請求項1に記載の発明は、ロボットアームの先端に設けられるロボットハンドであって、前記ロボットアームに取り付けられるハンド本体部と、前記ハンド本体部に着脱自在に装着されるハンド先端部とを備え、前記ハンド本体部が、圧縮エアによる圧力により、前記ハンド先端部の固定が解除された解除状態から前記ハンド先端部を固定する固定状態へと移行し、前記圧縮エアによる圧力が解放されても前記固定状態を維持する着脱機構と、前記着脱機構に圧縮エアを供給する流路を形成する着脱用流路部とを備え、前記ハンド先端部が、一方の開口から前記着脱機構が挿入される貫通孔を備え、前記着脱機構において前記圧縮エアによる圧力が解放された状態で、前記貫通孔の他方の開口から挿入される治具により前記着脱機構を押圧することにより、前記着脱機構が前記固定状態から前記解除状態へと移行する。
【0010】
請求項2に記載の発明は、請求項1に記載のロボットハンドであって、前記着脱機構が、前記貫通孔に挿入される着脱凸部と、解除位置と固定位置との間にて進退するピストンと、前記圧縮エアによる前記ピストンの前記解除位置から前記固定位置への移動に伴って前記着脱凸部から側方へと突出し、前記貫通孔と係合することにより前記着脱機構を前記固定状態とし、前記ピストンの前記固定位置から前記解除位置への移動に伴って元の位置へと戻ることにより、前記着脱機構を前記解除状態とする着脱係止部とを備える。
【0011】
請求項3に記載の発明は、請求項1または2に記載のロボットハンドであって、前記ハンド本体部および前記ハンド先端部が、前記固定状態にて一繋がりの流路を形成して前記ハンド先端部に取り付けられるツールと前記着脱用流路部とを接続するツール用流路部を備え、前記ハンド本体部または前記ハンド先端部が、前記ツール用流路部上に設けられた切換弁を備え、前記ツールが、前記着脱用流路部内の圧縮エアにより駆動される。
【0012】
請求項4に記載の発明は、ロボットハンドシステムであって、請求項1ないし3のいずれかに記載のロボットハンドと、前記ロボットハンドが取り付けられるロボットアームと、前記ロボットハンドの前記ハンド本体部からの前記ハンド先端部の取り外しに利用されるとともに取り外された後の前記ハンド先端部を保持する前記治具と、前記ハンド先端部と同様に、前記ハンド本体部に着脱自在に装着される他のハンド先端部と、前記治具と同様の構造を有し、前記ハンド本体部からの前記他のハンド先端部の取り外しに利用されるとともに取り外された後の前記他のハンド先端部を保持する他の治具とを備える。
【0013】
請求項5に記載の発明は、請求項4に記載のロボットハンドシステムであって、前記治具が、治具本体と、前記治具本体から突出する治具ピンと、前記治具ピンを前記治具本体から突出する方向へと押圧する付勢手段とを備え、前記ハンド先端部の取り外しの際に、前記治具ピンが前記ハンド先端部の前記貫通孔に挿入され、前記付勢手段により押圧される前記治具ピンにより前記着脱機構が押圧されて移動することにより、前記着脱機構が前記固定状態から前記解除状態へと移行し、前記ハンド先端部が前記ハンド本体部から取り外される。
【0014】
請求項6に記載の発明は、請求項5に記載のロボットハンドシステムであって、前記治具が、前記治具本体上にて前記ハンド先端部を係止するハンド先端部係止機構をさらに備え、前記ハンド先端部の取り外しの際に、前記ハンド先端部の前記貫通孔に挿入された前記治具ピンが、前記圧縮エアによる圧力が加えられた前記固定状態の前記着脱機構により押圧されて前記治具本体内に向かって移動することにより、前記ハンド先端部係止機構が非係止状態とされた後、前記着脱機構において前記圧縮エアによる圧力が解放されることにより、前記着脱機構の前記固定状態から前記解除状態への前記移行が行われるとともに、前記移行と並行して前記ハンド先端部係止機構が前記非係止状態から係止状態へと移行し、前記ハンド先端部を前記治具本体上に係止する。
【0015】
請求項7に記載の発明は、請求項6に記載のロボットハンドシステムであって、前記治具が、前記ハンド先端部係止機構が前記係止状態であること、または、前記非係止状態であることを検出する状態検出部をさらに備える。
【発明の効果】
【0016】
本発明では、簡単な構造でハンド先端部の取り外しを行うことができる。
【図面の簡単な説明】
【0017】
【図1】一の実施の形態に係るロボットハンドシステムの側面図である。
【図2】ロボットハンドの断面図である。
【図3】治具の断面図である。
【図4】治具の断面図である。
【図5.A】ロボットハンドおよび治具の断面図である。
【図5.B】ロボットハンドおよび治具の断面図である。
【図6.A】ロボットハンドおよび治具の断面図である。
【図6.B】ロボットハンドおよび治具の断面図である。
【発明を実施するための形態】
【0018】
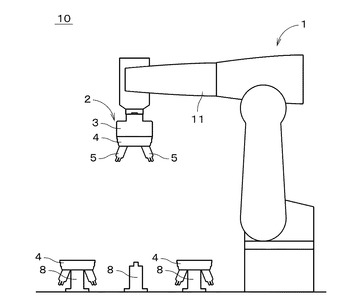
図1は、本発明の一の実施の形態に係るロボットハンドシステム10の側面図である。ロボットハンドシステム10は、組立ロボット1、複数の治具8、および、複数のハンド先端部4を備える。組立ロボット1は、多数の部品から構成される組立体を自動的に組み立てる自動組立ライン等において用いられる産業用ロボットである。図1の組立ロボット1は、多自由度(例えば、6自由度)のロボットアーム11、および、ロボットアーム11の先端に設けられるロボットハンド2を備え、ロボットアーム11によりロボットハンド2が3次元的に移動可能とされる。
【0019】
ロボットハンド2は、ロボットアーム11に取り付けられるハンド本体部3、および、ハンド本体部3に着脱自在に装着されるハンド先端部4を備える。ハンド先端部4は、ワークを把持する複数(本実施の形態では、4つ)の把持部5をツールとして備える。なお、ハンド先端部4では、把持部5に代えて、対象物に対して様々な動作を行う様々な種類のツールが設けられてよい。
【0020】
複数の治具8はそれぞれ、ハンド本体部3からのハンド先端部4の取り外しに利用されるとともに取り外された後のハンド先端部4を保持する。複数の治具8は互いに同様の構造を有し、各治具8には、交換用のハンド先端部4が1つ保持されている。交換用のハンド先端部4も、現在装着されているハンド先端部4と同様に、ハンド本体部3に着脱自在に装着される。
【0021】
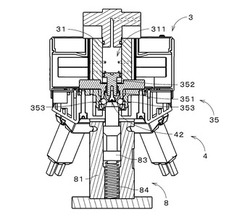
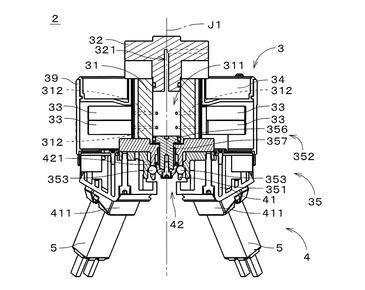
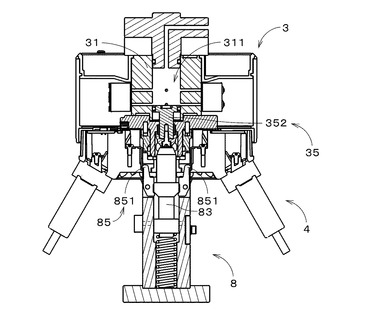
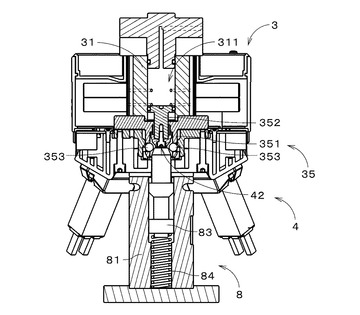
図2は、ロボットハンド2の断面図である。図2では、断面の一部に平行斜線を付し、また、断面よりも奥に位置する構造の一部も描いている(図3ないし図6.Bにおいても同様)。ハンド本体部3は、ロボットハンド2の上下方向(図2中の上下方向に対応する方向であり、重力方向に一致するとは限らない。他の図においても同様。)に延びる中心軸J1を中心とする略筒状の基体31、基体31の上部に取り付けられるアタッチメント32、アタッチメント32の下側にて基体31の外側面に取り付けられる通信制御部34、通信制御部34の下側にて基体31の外側面に取り付けられる複数(本実施の形態では、8つ)の電磁弁33、および、基体31から下側に突出する略円柱状の着脱機構35を備える。ハンド本体部3では、基体31、通信制御部34および複数の電磁弁33が、略円筒状のケーシング39の内部に収容される。
【0022】
略筒状である基体31の内部空間311(以下、「エア溜まり311」という。)は略円筒状であり、基体31の上部開口はアタッチメント32により閉塞され、基体31の下部開口は着脱機構35の後述するピストン352により閉塞される。アタッチメント32には、ロボットハンド2の外部の圧縮エア供給源とエア溜まり311とを接続する流路321が形成される。アタッチメント32と圧縮エア供給源との間には、図示しない電磁弁が設けられており、当該電磁弁が制御されることにより、エア溜まり311に圧縮エアが供給され、また、エア溜まり311が大気開放される。基体31には、エア溜まり311と複数の電磁弁33とをそれぞれ接続する複数の流路312が設けられる。
【0023】
ハンド先端部4は、中心軸J1を中心とする略柱状の先端部本体41、および、先端部本体41の下面外周部に取り付けられる複数の把持部5を備える。先端部本体41の下面には、複数の把持部5が交換可能に取り付けられる複数のツール取付部411が設けられる。ハンド本体部3の内部、および、ハンド先端部4の先端部本体41の内部には、複数の把持部5と複数の電磁弁33とを接続する図示省略の複数の流路が設けられており、当該複数の流路および基体31の複数の流路312が、複数の把持部5とエア溜まり311とを接続するツール用流路である。
【0024】
換言すれば、ハンド本体部3およびハンド先端部4は、ハンド先端部4がハンド本体部3に固定された状態において、一繋がりのツール用流路を形成して複数の把持部5と基体31のエア溜まり311とを接続するツール用流路部を備える。複数の把持部5は、エア溜まり311内の圧縮エアによりそれぞれ駆動され、各把持部5に対応する電磁弁33は、ツール用流路上に設けられて把持部5によるワークの把持と把持の解除とを切り換える切換弁である。なお、複数の電磁弁33は、ツール用流路上に配置されるのであれば、ハンド先端部4に設けられてもよい。また、電磁弁33に代えて、他の構造の切換弁が設けられてもよい。
【0025】
先端部本体41の中央部には、中心軸J1を中心とする貫通孔42が設けられる。貫通孔42の中心軸J1に垂直な断面は略円形である。ハンド本体部3の着脱機構35は、貫通孔42の一方の開口である上部開口から貫通孔42内に挿入されている。着脱機構35は、エア溜まり311の下側から中心軸J1に平行な方向(以下、「軸方向」ともいう。)に延びる略円筒状の着脱凸部351、着脱凸部351の内部に挿入される略円柱状のピストン352、および、着脱凸部351の側壁部を貫通する複数の孔内にそれぞれ配置されるボール353を備える。
【0026】
ピストン352は、略円板状のピストン上部356、および、ピストン上部356の中心部から下方に突出する略円柱状のピストン下部357を備える。ピストン下部357の径は、ピストン上部356の径よりも小さい。ピストン上部356は、エア溜まり311内の下端部に位置し、ピストン下部357は、基体31の下部開口から下方へと(すなわち、ハンド先端部4側へと)突出する。ピストン上部356の径は、エア溜まり311の径にほぼ等しく、ピストン下部357の径は、基体31の下部開口の径にほぼ等しい。ピストン下部357の先端部は、先端に近づくに従って径が小さくなるテーパ形状を有する。
【0027】
図2に示す状態では、着脱凸部351がハンド先端部4の貫通孔42に挿入されており、着脱機構35のピストン352は、エア溜まり311に供給された圧縮エアにより下方へと押圧されて基体31の下端部に付勢されている。また、複数のボール353が、ピストン352の先端部により内側から押圧され、着脱凸部351の孔から側方へと突出する。複数のボール353の着脱凸部351から突出した部位は、ハンド先端部4の貫通孔42の内側面に設けられた環状の凸部421の下側に当接し、これにより、複数のボール353が貫通孔42に係合される。その結果、ハンド本体部3にハンド先端部4が固定される。複数のボール353は、ハンド先端部4をハンド本体部3に係止する着脱係止部である。
【0028】
以下の説明では、図2に示すピストン352の位置を「固定位置」といい、ピストン352が固定位置に位置する着脱機構35の状態を「固定状態」という。ロボットハンド2では、エア溜まり311は、着脱機構35に圧縮エアを供給する着脱用流路の一部であり、ハンド本体部3の基体31は、着脱用流路を形成する着脱用流路部である。着脱機構35では、エア溜まり311内の圧縮エアによる圧力が解放された状態でも固定状態が維持され、ハンド先端部4がハンド本体部3に固定された状態が維持される。
【0029】
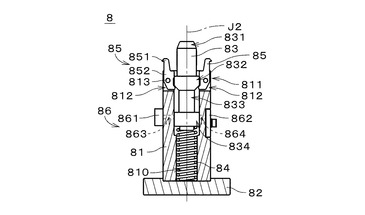
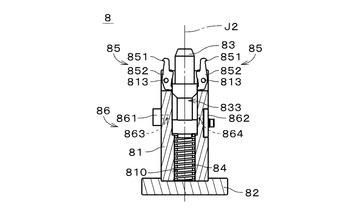
図3は、治具8の断面図である。治具8は、略四角筒状の治具本体81、および、治具本体81の下部開口を閉塞する治具底部82を備える。治具8の上下方向(図3中の上下方向に対応する方向であり、重力方向に一致するとは限らない。)に延びる中心軸J2に垂直に治具本体81を切断すると、治具本体81の内部空間810の断面は略円形である。
【0030】
治具8は、中心軸J2を中心とする略円柱状であって下部が治具本体81内に収容される治具ピン83、治具本体81内において治具ピン83の下端および治具底部82に当接する付勢手段であるバネ84、および、治具本体81の上部811において側壁部に形成された複数の溝812内に配置される複数のフック部材85を備える。
【0031】
治具本体81の上部811は、後述するように、ハンド先端部4に対向する対向部であり、治具ピン83の上部は、治具本体81の上部811から上側に突出している。治具ピン83の上端部831は、上端に近づくに従って径が小さくなるテーパ形状を有する。また、治具ピン83の長手方向の中央部には、全周に亘って側方に突出するとともにフック部材85に当接する中央突出部832が設けられる。治具ピン83の下部834も中央突出部832とほぼ同様の直径を有し、当該下部834と中央突出部832との間の部位は、中央突出部832よりも直径が小さい小径部833となっている。
【0032】
フック部材85の上部も、治具ピン83の上部と同様に、治具本体81の上部811から上側に突出している。以下の説明では、フック部材85のうち、治具本体81の上部811から突出する部位を「フック部851」といい、治具本体81の溝812内に配置されて治具ピン83の中央突出部832の外側面に当接する部位を「ピン当接部852」という。フック部材85は、溝812内に設けられた回転軸813を中心として回動可能に設置される。
【0033】
治具8では、治具ピン83が下向きに(すなわち、治具底部82に向けて)押圧され、図4に示すように、下側へと移動するとバネ84が圧縮され、治具ピン83を押圧する荷重が除去されると、バネ84の復元力により治具ピン83が図3に示す位置へと上向きに移動する。すなわち、バネ84は、治具ピン83を治具本体81から突出する方向へと付勢する付勢手段である。なお、治具8では、当該付勢手段として、例えば、バネ84以外の様々な弾性部材が用いられてもよい。
【0034】
治具ピン83が図3に示す位置に位置する状態では、複数のフック部材85のフック部851は、治具本体81の外側面よりも少しだけ側方(すなわち、中心軸J2から離れる側)へと突出している。また、治具ピン83が、図3に示す位置から図4に示す位置へと移動すると、フック部材85のピン当接部852の下部が治具ピン83により外側へと押圧される。これにより、フック部材85が回転軸813を中心として僅かな角度だけ回動し、フック部851が中心軸J2に向かって内側へと移動する。治具ピン83が図4に示す位置に位置する状態では、複数のフック部851は、治具本体81の外側面よりも内側に位置する。換言すれば、治具ピン83が治具本体81内に押し込まれることにより、複数のフック部851が内側へと移動し、治具ピン83が治具本体81から突出する方向に移動することにより、複数のフック部851が外側へと開くように移動する。
【0035】
後述するように、治具8では、図3に示すように、フック部851が治具本体81の外側面よりも少しだけ側方に突出した状態で、フック部材85がハンド先端部4の貫通孔42に係合し、ハンド先端部4が治具8に係止される。すなわち、フック部材85および回転軸813は、ハンド先端部4を治具本体81上にて係止するハンド先端部係止機構である。また、フック部851が内側に移動して図4に示す位置に位置することにより、フック部材85とハンド先端部4との係合が解除される。以下の説明では、図3に示すフック部材85の状態を「係止状態」といい、図4に示すフック部材85の状態を「非係止状態」という。
【0036】
図3および図4に示すように、治具8は、さらに、フック部材85の状態を検出する状態検出部86を備える。状態検出部86では、フック部材85が係止状態であること、または、非係止状態であることが検出される。状態検出部86は、反射型の光電センサ861、および、リフレクタ862を備え、光電センサ861とリフレクタ862とは、治具本体81を挟んで対向して配置される。治具本体81には、光電センサ861から治具本体81の内部空間810へと延びる貫通孔863、および、内部空間810からリフレクタ862へと延びる貫通孔864が設けられる。
【0037】
図4に示すように、フック部材85が非係止状態の場合、治具ピン83の小径部833が貫通孔863と貫通孔864との間に位置する。このため、光電センサ861から出射された可視光は、治具本体81の貫通孔863、治具ピン83の小径部833と治具本体81の内部空間810の内側面との間隙、および、貫通孔864を通過してリフレクタ862に入射する。そして、リフレクタ862により反射された可視光が、同様の経路を反対向きに通過して光電センサ861にて受光される。状態検出部86では、リフレクタ862からの反射光が光電センサ861により検出されることにより、フック部材85が非係止状態であることが検出される。
【0038】
一方、図3に示すように、フック部材85が係止状態の場合、治具ピン83の下部834が貫通孔863と貫通孔864との間に位置しており、光電センサ861から出射された可視光は、治具ピン83の下部834により遮られてリフレクタ862まで届かない。したがって、光電センサ861では、リフレクタ862からの反射光が検出されず、これにより、フック部材85が係止状態であること(より正確には、フック部材85が非係止状態ではないこと)が検出される。
【0039】
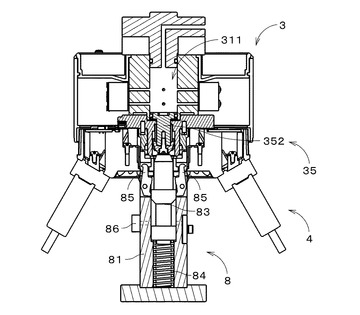
ハンド先端部4をハンド本体部3から取り外す際には、まず、図1に示すロボットアーム11によりロボットハンド2が治具8の上方へと移動され、治具8に向かって下降することにより、図3に示す治具8の治具ピン83が、図2に示すハンド先端部4の貫通孔42の下部開口から貫通孔42内に挿入されて着脱機構35のピストン352に当接する。ハンド本体部3のエア溜まり311では、圧縮エアによりピストン352に圧力が加えられた状態が維持されており、着脱機構35は固定状態となっている。このため、治具ピン83はピストン352により下向きに押圧され、治具本体81内に向かって移動する。これにより、治具8のフック部材85が係止状態から、図5.Aに示す非係止状態へと移行する。
【0040】
図5.A、および、後述する図5.Bは、着脱機構35が固定状態のロボットハンド2および治具8の断面図である。図5.Aと図5.Bとは断面位置が異なっており、図5.Aはフック部材85を含む位置の断面を示し、図5.Bはボール353を含む位置の断面を示す。また、後述する図6.Aおよび図6.Bは、着脱機構35が後述する解除状態のロボットハンド2および治具8の断面図である。図6.Aと図6.Bとは断面位置が異なっており、図6.Aはフック部材85を含む位置の断面を示し、図6.Bはボール353を含む位置の断面を示す。
【0041】
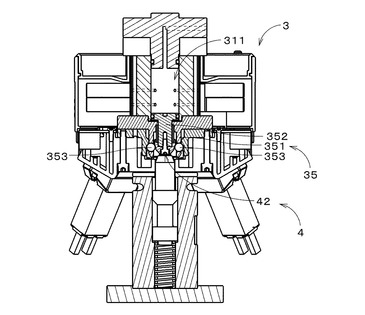
ハンド本体部3のエア溜まり311が大気開放されると、着脱機構35において圧縮エアによるピストン352への圧力が解放される。そして、治具8のバネ84の復元力により、治具ピン83が着脱機構35のピストン352を押圧しつつ治具本体81から突出する方向へと移動する。これにより、図6.Aに示すように、ピストン352が固定位置よりも上側へと移動し、当該移動に伴って、図6.Bに示すように、複数のボール353が着脱凸部351の孔内部へと戻って(すなわち、元の位置へと戻って)貫通孔42との係合が解除される。その結果、ハンド本体部3とハンド先端部4との固定が解除される。
【0042】
以下の説明では、図6.Aおよび図6.Bに示すように、エア溜まり311の底部から上方に離間しているピストン352の位置を「解除位置」といい、ピストン352が解除位置に位置する着脱機構35の状態を「解除状態」という。ピストン352は、解除位置と図2に示す固定位置との間にて進退し、基体31の下部は、ピストン352の一部が収容されるシリンダの役割を果たす。
【0043】
ロボットハンドシステム10では、治具8において治具ピン83が上方へと移動することにより、上述のように、着脱機構35が、ハンド先端部4を固定する固定状態から、ハンド先端部4の固定が解除された解除状態へと移行し、ハンド先端部4がハンド本体部3から取り外される。また、治具ピン83が上方へと移動することにより、着脱機構35の当該移行と並行して、図6.Aに示すように、フック部材85が非係止状態から係止状態へと移行し、ハンド先端部4がフック部材85のフック部851により治具8に係止される。その後、ロボットアーム11(図1参照)が上方へと移動することにより、ハンド本体部3がハンド先端部4から離間する。
【0044】
次に、ハンド本体部3にハンド先端部4を取り付ける際の動作について説明する。まず、図6.Bに示すように、治具8に係止されたハンド先端部4の貫通孔42に、ハンド本体部3の着脱機構35が挿入され、着脱機構35のピストン352が治具8の治具ピン83に当接する。ハンド本体部3では、エア溜まり311が大気開放されており、治具8では、治具ピン83がバネ84により治具本体81から突出する方向に押圧されている。このため、ピストン352は、治具ピン83によりエア溜まり311側へと押し込まれ、固定位置から解除位置へと移動する。また、フック部材85は、図6.Aに示すように、係止状態のまま維持される。
【0045】
続いて、エア溜まり311に圧縮エアが供給されることにより、ピストン352が解除位置から図5.Bに示す固定位置へと移動し、当該移動に伴い、着脱機構35の複数のボール353が着脱凸部351から側方へと突出してハンド先端部4の貫通孔42と係合する。換言すれば、圧縮エアによる圧力により着脱機構35が解除状態から固定状態へと移行し、ハンド先端部4がハンド本体部3に取り付けられる。
【0046】
また、ピストン352の上記移動により、図5.Aに示すように、治具8の治具ピン83が治具本体81側へと押し込まれ、フック部材85が係止状態から非係止状態へと移行する。これにより、フック部材85によるハンド先端部4の係止が解除される。そして、状態検出部86により、フック部材85が非係止状態へと移行したことが検出されると、ロボットアーム11が上昇し、ハンド先端部4がハンド本体部3に固定された状態で治具8から離間する。
【0047】
以上に説明したように、ロボットハンド2では、ハンド本体部3に設けられた着脱機構35において圧縮エアによる圧力が解放された状態で、ハンド先端部4の貫通孔42の下部開口から挿入される治具8により着脱機構35が押圧されることにより、着脱機構35が固定状態から解除状態へと移行する。このように、ロボットハンド2では、着脱機構35を固定状態から解除状態へと移行させるための機構をハンド本体部3やハンド先端部4に設ける必要がなく、簡単な構造でハンド先端部4の取り外しを行うことができる。その結果、組立ロボット1およびロボットハンドシステム10の製造コストを低減することができる。
【0048】
また、上述のように、着脱凸部351、ピストン352および複数のボール353により、着脱機構35を容易に実現することができる。なお、ピストン352の解除位置と固定位置との間の進退に伴って着脱機構35を解除状態と固定状態との間で移行する着脱係止部として、複数のボール353に代えて、他の様々な構造(例えば、着脱凸部351から側方へ突出することにより着脱機構35を固定状態とするフック部材)が利用されてよい。
【0049】
ロボットハンド2では、ツール用流路を形成するツール用流路部がハンド本体部3およびハンド先端部4に設けられ、着脱機構35にも供給されるエア溜まり311内の圧縮エアにより、当該ツール用流路を介して複数の把持部5が駆動される。このような構造を採用することにより、ロボットハンド2に圧縮エアを供給するための配管を減らすことができ、ロボットハンド2の構造を簡素化することができる。
【0050】
ロボットハンドシステム10では、ロボットハンド2のハンド本体部3からのハンド先端部4の取り外しに利用されるとともに、取り外された後のハンド先端部4を保持する複数の治具8が設けられ、ハンド本体部3に着脱自在に装着される複数のハンド先端部4が、複数の治具8に保持され、または、ハンド本体部3に固定される。これにより、様々な種類のツールを備える複数種類のハンド先端部4を交換しつつ順次使用して作業を迅速に行うことができる。
【0051】
ロボットハンドシステム10では、治具8にハンド先端部4を係止するフック部材85が設けられ、ロボットハンド2の着脱機構35の固定状態から解除状態への移行に伴ってフック部材85が非係止状態から係止状態へと移行することにより、ハンド先端部4をハンド本体部3から取り外して確実に治具8へと受け渡すことができる。また、着脱機構35の状態移行とフック部材85の状態移行とが、治具8のバネ84の復元力により並行して行われることにより、治具8の構成および動作の制御を簡素化することができ、着脱機構35およびフック部材85の状態移行の連動ミスによる誤動作を防止することができる。さらに、治具8の向きに拘わらず、治具8によりハンド先端部4を安定して保持することができるため、治具8の配置の自由度が向上し、ロボットハンドシステム10を小型化することができる。治具8は、例えば、治具ピン83が治具本体81から重力方向の下側に向かって突出するように配置されてもよく、あるいは、重力方向に垂直な方向に向かって突出するように配置されてもよい。
【0052】
上述のように、ロボットハンドシステム10では、着脱機構35の解除状態から固定状態への移行に伴ってフック部材85が係止状態から非係止状態へと移行し、フック部材85の非係止状態が状態検出部86により検出される。そして、当該検出が行われた後、ロボットアーム11が移動してロボットハンド2が治具8から離間する。これにより、ハンド先端部4が治具8に係止された状態で誤ってハンド先端部4を治具8から離間させてしまうことが防止されるため、ハンド先端部4や治具8の破損を防止することができる。
【0053】
以上、本発明の実施の形態について説明してきたが、本発明は上記実施の形態に限定されるものではなく、様々な変更が可能である。
【0054】
例えば、ハンド先端部4には、必ずしもツール取付部411が設けられる必要はなく、先端部本体41に様々なツールが直接設けられてもよい。また、ハンド先端部4に設けられるツールの個数も様々に変更されてよい。上述のロボットハンド2や治具8の構造は、組み立て以外の様々な動作を行うロボットハンドシステムに適用されてよい。
【0055】
治具8では、状態検出部86は必ずしも光電センサ861およびリフレクタ862を備える必要はなく、様々な構成の状態検出部86が設けられてよい。例えば、状態検出部86では、バネ84の圧縮状態を測定することにより係止状態または非係止状態が検出されてもよい。
【0056】
上記実施の形態および各変形例における構成は、相互に矛盾しない限り適宜組み合わされてよい。
【符号の説明】
【0057】
2 ロボットハンド
3 ハンド本体部
4 ハンド先端部
5 把持部
8 治具
10 ロボットハンドシステム
11 ロボットアーム
31 基体
33 電磁弁
35 着脱機構
41 先端部本体
42 貫通孔
81 治具本体
83 治具ピン
84 バネ
85 フック部材
86 状態検出部
311 エア溜まり
312 流路
351 着脱凸部
352 ピストン
353 ボール
411 ツール取付部
【技術分野】
【0001】
本発明は、組立ロボットのロボットアームの先端に設けられるロボットハンド、および、当該ロボットハンドを備えるロボットハンドシステムに関する。
【背景技術】
【0002】
従来より、自動組立ライン等において組立ロボットが用いられており、組立ロボットでは、ワークに対して様々な操作を行うロボットハンドがロボットアームに接続されることにより3次元的に移動可能とされる。また、ワークを把持するロボットハンドでは、圧縮エアを用いた把持部の駆動により、ワークの把持および解放が行われる。
【0003】
このような組立ロボットでは、様々なワークに対応するために、ロボットハンドまたはロボットハンドの一部を交換することが行われている。例えば、特許文献1では、エア駆動によりアームに対するロボットハンドの着脱を行うハンド着脱手段を備え、ロボットハンドの自動交換を行うロボットが開示されている。
【0004】
また、特許文献2のロボットハンドでは、エアを用いた第1駆動機構によりチャックが駆動されて被把持部が把持されるとともに、当該エアを用いた第2駆動機構により着脱手段が駆動されてハンド本体部に対するハンド先端部の着脱が行われる。具体的には、ハンド本体部において、着脱手段のピストンをエアにより下向きに移動させて可動球を外側に突出させることにより、ハンド本体部とハンド先端部とが結合され、ピストンに対するエアの圧力を抜くことにより、ハンド先端部がハンド本体部から分離する。
【0005】
特許文献3の自動工具交換装置では、ロボットハンドのアーム等に連結される固定プレートと、工具を備えた工具プレートとが着脱可能に結合される。当該自動工具交換装置では、固定プレートが、軸線方向に進退可能なアクチュエータ、および、アクチュエータに外接して半径方向に移動可能なロックピンを備える。また、工具プレートは、固定プレートの接合端側が挿入可能な環状体であり、内周壁には、固定プレートのロックピンが半径方向に突出した際にその先端が嵌り込むロック孔が設けられる。自動工具交換装置では、アクチュエータが収容されるシリンダボアの上部に設けられた1つのポートから作動流体が供給され、アクチュエータが下降してロックピンが半径方向に突出することにより、工具プレートが固定プレートに装着される。また、シリンダボアの下部に設けられた他のポートから作動流体が供給され、アクチュエータが上昇することにより、ロックピンが半径方向の内側に移動し、工具プレートが固定プレートから取り外される。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2000−354919号公報
【特許文献2】特開2010−149223号公報
【特許文献3】実開平6−61486号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
ところで、特許文献3のような自動工具交換装置では、工具プレートの装着および取り外しのための作動流体の配管、および、作動流体の流れを制御する制御部がそれぞれ必要となり、装置構造が複雑となってしまう。
【0008】
本発明は、上記課題に鑑みなされたものであり、簡単な構造でハンド先端部の取り外しを行うことを目的としている。
【課題を解決するための手段】
【0009】
請求項1に記載の発明は、ロボットアームの先端に設けられるロボットハンドであって、前記ロボットアームに取り付けられるハンド本体部と、前記ハンド本体部に着脱自在に装着されるハンド先端部とを備え、前記ハンド本体部が、圧縮エアによる圧力により、前記ハンド先端部の固定が解除された解除状態から前記ハンド先端部を固定する固定状態へと移行し、前記圧縮エアによる圧力が解放されても前記固定状態を維持する着脱機構と、前記着脱機構に圧縮エアを供給する流路を形成する着脱用流路部とを備え、前記ハンド先端部が、一方の開口から前記着脱機構が挿入される貫通孔を備え、前記着脱機構において前記圧縮エアによる圧力が解放された状態で、前記貫通孔の他方の開口から挿入される治具により前記着脱機構を押圧することにより、前記着脱機構が前記固定状態から前記解除状態へと移行する。
【0010】
請求項2に記載の発明は、請求項1に記載のロボットハンドであって、前記着脱機構が、前記貫通孔に挿入される着脱凸部と、解除位置と固定位置との間にて進退するピストンと、前記圧縮エアによる前記ピストンの前記解除位置から前記固定位置への移動に伴って前記着脱凸部から側方へと突出し、前記貫通孔と係合することにより前記着脱機構を前記固定状態とし、前記ピストンの前記固定位置から前記解除位置への移動に伴って元の位置へと戻ることにより、前記着脱機構を前記解除状態とする着脱係止部とを備える。
【0011】
請求項3に記載の発明は、請求項1または2に記載のロボットハンドであって、前記ハンド本体部および前記ハンド先端部が、前記固定状態にて一繋がりの流路を形成して前記ハンド先端部に取り付けられるツールと前記着脱用流路部とを接続するツール用流路部を備え、前記ハンド本体部または前記ハンド先端部が、前記ツール用流路部上に設けられた切換弁を備え、前記ツールが、前記着脱用流路部内の圧縮エアにより駆動される。
【0012】
請求項4に記載の発明は、ロボットハンドシステムであって、請求項1ないし3のいずれかに記載のロボットハンドと、前記ロボットハンドが取り付けられるロボットアームと、前記ロボットハンドの前記ハンド本体部からの前記ハンド先端部の取り外しに利用されるとともに取り外された後の前記ハンド先端部を保持する前記治具と、前記ハンド先端部と同様に、前記ハンド本体部に着脱自在に装着される他のハンド先端部と、前記治具と同様の構造を有し、前記ハンド本体部からの前記他のハンド先端部の取り外しに利用されるとともに取り外された後の前記他のハンド先端部を保持する他の治具とを備える。
【0013】
請求項5に記載の発明は、請求項4に記載のロボットハンドシステムであって、前記治具が、治具本体と、前記治具本体から突出する治具ピンと、前記治具ピンを前記治具本体から突出する方向へと押圧する付勢手段とを備え、前記ハンド先端部の取り外しの際に、前記治具ピンが前記ハンド先端部の前記貫通孔に挿入され、前記付勢手段により押圧される前記治具ピンにより前記着脱機構が押圧されて移動することにより、前記着脱機構が前記固定状態から前記解除状態へと移行し、前記ハンド先端部が前記ハンド本体部から取り外される。
【0014】
請求項6に記載の発明は、請求項5に記載のロボットハンドシステムであって、前記治具が、前記治具本体上にて前記ハンド先端部を係止するハンド先端部係止機構をさらに備え、前記ハンド先端部の取り外しの際に、前記ハンド先端部の前記貫通孔に挿入された前記治具ピンが、前記圧縮エアによる圧力が加えられた前記固定状態の前記着脱機構により押圧されて前記治具本体内に向かって移動することにより、前記ハンド先端部係止機構が非係止状態とされた後、前記着脱機構において前記圧縮エアによる圧力が解放されることにより、前記着脱機構の前記固定状態から前記解除状態への前記移行が行われるとともに、前記移行と並行して前記ハンド先端部係止機構が前記非係止状態から係止状態へと移行し、前記ハンド先端部を前記治具本体上に係止する。
【0015】
請求項7に記載の発明は、請求項6に記載のロボットハンドシステムであって、前記治具が、前記ハンド先端部係止機構が前記係止状態であること、または、前記非係止状態であることを検出する状態検出部をさらに備える。
【発明の効果】
【0016】
本発明では、簡単な構造でハンド先端部の取り外しを行うことができる。
【図面の簡単な説明】
【0017】
【図1】一の実施の形態に係るロボットハンドシステムの側面図である。
【図2】ロボットハンドの断面図である。
【図3】治具の断面図である。
【図4】治具の断面図である。
【図5.A】ロボットハンドおよび治具の断面図である。
【図5.B】ロボットハンドおよび治具の断面図である。
【図6.A】ロボットハンドおよび治具の断面図である。
【図6.B】ロボットハンドおよび治具の断面図である。
【発明を実施するための形態】
【0018】
図1は、本発明の一の実施の形態に係るロボットハンドシステム10の側面図である。ロボットハンドシステム10は、組立ロボット1、複数の治具8、および、複数のハンド先端部4を備える。組立ロボット1は、多数の部品から構成される組立体を自動的に組み立てる自動組立ライン等において用いられる産業用ロボットである。図1の組立ロボット1は、多自由度(例えば、6自由度)のロボットアーム11、および、ロボットアーム11の先端に設けられるロボットハンド2を備え、ロボットアーム11によりロボットハンド2が3次元的に移動可能とされる。
【0019】
ロボットハンド2は、ロボットアーム11に取り付けられるハンド本体部3、および、ハンド本体部3に着脱自在に装着されるハンド先端部4を備える。ハンド先端部4は、ワークを把持する複数(本実施の形態では、4つ)の把持部5をツールとして備える。なお、ハンド先端部4では、把持部5に代えて、対象物に対して様々な動作を行う様々な種類のツールが設けられてよい。
【0020】
複数の治具8はそれぞれ、ハンド本体部3からのハンド先端部4の取り外しに利用されるとともに取り外された後のハンド先端部4を保持する。複数の治具8は互いに同様の構造を有し、各治具8には、交換用のハンド先端部4が1つ保持されている。交換用のハンド先端部4も、現在装着されているハンド先端部4と同様に、ハンド本体部3に着脱自在に装着される。
【0021】
図2は、ロボットハンド2の断面図である。図2では、断面の一部に平行斜線を付し、また、断面よりも奥に位置する構造の一部も描いている(図3ないし図6.Bにおいても同様)。ハンド本体部3は、ロボットハンド2の上下方向(図2中の上下方向に対応する方向であり、重力方向に一致するとは限らない。他の図においても同様。)に延びる中心軸J1を中心とする略筒状の基体31、基体31の上部に取り付けられるアタッチメント32、アタッチメント32の下側にて基体31の外側面に取り付けられる通信制御部34、通信制御部34の下側にて基体31の外側面に取り付けられる複数(本実施の形態では、8つ)の電磁弁33、および、基体31から下側に突出する略円柱状の着脱機構35を備える。ハンド本体部3では、基体31、通信制御部34および複数の電磁弁33が、略円筒状のケーシング39の内部に収容される。
【0022】
略筒状である基体31の内部空間311(以下、「エア溜まり311」という。)は略円筒状であり、基体31の上部開口はアタッチメント32により閉塞され、基体31の下部開口は着脱機構35の後述するピストン352により閉塞される。アタッチメント32には、ロボットハンド2の外部の圧縮エア供給源とエア溜まり311とを接続する流路321が形成される。アタッチメント32と圧縮エア供給源との間には、図示しない電磁弁が設けられており、当該電磁弁が制御されることにより、エア溜まり311に圧縮エアが供給され、また、エア溜まり311が大気開放される。基体31には、エア溜まり311と複数の電磁弁33とをそれぞれ接続する複数の流路312が設けられる。
【0023】
ハンド先端部4は、中心軸J1を中心とする略柱状の先端部本体41、および、先端部本体41の下面外周部に取り付けられる複数の把持部5を備える。先端部本体41の下面には、複数の把持部5が交換可能に取り付けられる複数のツール取付部411が設けられる。ハンド本体部3の内部、および、ハンド先端部4の先端部本体41の内部には、複数の把持部5と複数の電磁弁33とを接続する図示省略の複数の流路が設けられており、当該複数の流路および基体31の複数の流路312が、複数の把持部5とエア溜まり311とを接続するツール用流路である。
【0024】
換言すれば、ハンド本体部3およびハンド先端部4は、ハンド先端部4がハンド本体部3に固定された状態において、一繋がりのツール用流路を形成して複数の把持部5と基体31のエア溜まり311とを接続するツール用流路部を備える。複数の把持部5は、エア溜まり311内の圧縮エアによりそれぞれ駆動され、各把持部5に対応する電磁弁33は、ツール用流路上に設けられて把持部5によるワークの把持と把持の解除とを切り換える切換弁である。なお、複数の電磁弁33は、ツール用流路上に配置されるのであれば、ハンド先端部4に設けられてもよい。また、電磁弁33に代えて、他の構造の切換弁が設けられてもよい。
【0025】
先端部本体41の中央部には、中心軸J1を中心とする貫通孔42が設けられる。貫通孔42の中心軸J1に垂直な断面は略円形である。ハンド本体部3の着脱機構35は、貫通孔42の一方の開口である上部開口から貫通孔42内に挿入されている。着脱機構35は、エア溜まり311の下側から中心軸J1に平行な方向(以下、「軸方向」ともいう。)に延びる略円筒状の着脱凸部351、着脱凸部351の内部に挿入される略円柱状のピストン352、および、着脱凸部351の側壁部を貫通する複数の孔内にそれぞれ配置されるボール353を備える。
【0026】
ピストン352は、略円板状のピストン上部356、および、ピストン上部356の中心部から下方に突出する略円柱状のピストン下部357を備える。ピストン下部357の径は、ピストン上部356の径よりも小さい。ピストン上部356は、エア溜まり311内の下端部に位置し、ピストン下部357は、基体31の下部開口から下方へと(すなわち、ハンド先端部4側へと)突出する。ピストン上部356の径は、エア溜まり311の径にほぼ等しく、ピストン下部357の径は、基体31の下部開口の径にほぼ等しい。ピストン下部357の先端部は、先端に近づくに従って径が小さくなるテーパ形状を有する。
【0027】
図2に示す状態では、着脱凸部351がハンド先端部4の貫通孔42に挿入されており、着脱機構35のピストン352は、エア溜まり311に供給された圧縮エアにより下方へと押圧されて基体31の下端部に付勢されている。また、複数のボール353が、ピストン352の先端部により内側から押圧され、着脱凸部351の孔から側方へと突出する。複数のボール353の着脱凸部351から突出した部位は、ハンド先端部4の貫通孔42の内側面に設けられた環状の凸部421の下側に当接し、これにより、複数のボール353が貫通孔42に係合される。その結果、ハンド本体部3にハンド先端部4が固定される。複数のボール353は、ハンド先端部4をハンド本体部3に係止する着脱係止部である。
【0028】
以下の説明では、図2に示すピストン352の位置を「固定位置」といい、ピストン352が固定位置に位置する着脱機構35の状態を「固定状態」という。ロボットハンド2では、エア溜まり311は、着脱機構35に圧縮エアを供給する着脱用流路の一部であり、ハンド本体部3の基体31は、着脱用流路を形成する着脱用流路部である。着脱機構35では、エア溜まり311内の圧縮エアによる圧力が解放された状態でも固定状態が維持され、ハンド先端部4がハンド本体部3に固定された状態が維持される。
【0029】
図3は、治具8の断面図である。治具8は、略四角筒状の治具本体81、および、治具本体81の下部開口を閉塞する治具底部82を備える。治具8の上下方向(図3中の上下方向に対応する方向であり、重力方向に一致するとは限らない。)に延びる中心軸J2に垂直に治具本体81を切断すると、治具本体81の内部空間810の断面は略円形である。
【0030】
治具8は、中心軸J2を中心とする略円柱状であって下部が治具本体81内に収容される治具ピン83、治具本体81内において治具ピン83の下端および治具底部82に当接する付勢手段であるバネ84、および、治具本体81の上部811において側壁部に形成された複数の溝812内に配置される複数のフック部材85を備える。
【0031】
治具本体81の上部811は、後述するように、ハンド先端部4に対向する対向部であり、治具ピン83の上部は、治具本体81の上部811から上側に突出している。治具ピン83の上端部831は、上端に近づくに従って径が小さくなるテーパ形状を有する。また、治具ピン83の長手方向の中央部には、全周に亘って側方に突出するとともにフック部材85に当接する中央突出部832が設けられる。治具ピン83の下部834も中央突出部832とほぼ同様の直径を有し、当該下部834と中央突出部832との間の部位は、中央突出部832よりも直径が小さい小径部833となっている。
【0032】
フック部材85の上部も、治具ピン83の上部と同様に、治具本体81の上部811から上側に突出している。以下の説明では、フック部材85のうち、治具本体81の上部811から突出する部位を「フック部851」といい、治具本体81の溝812内に配置されて治具ピン83の中央突出部832の外側面に当接する部位を「ピン当接部852」という。フック部材85は、溝812内に設けられた回転軸813を中心として回動可能に設置される。
【0033】
治具8では、治具ピン83が下向きに(すなわち、治具底部82に向けて)押圧され、図4に示すように、下側へと移動するとバネ84が圧縮され、治具ピン83を押圧する荷重が除去されると、バネ84の復元力により治具ピン83が図3に示す位置へと上向きに移動する。すなわち、バネ84は、治具ピン83を治具本体81から突出する方向へと付勢する付勢手段である。なお、治具8では、当該付勢手段として、例えば、バネ84以外の様々な弾性部材が用いられてもよい。
【0034】
治具ピン83が図3に示す位置に位置する状態では、複数のフック部材85のフック部851は、治具本体81の外側面よりも少しだけ側方(すなわち、中心軸J2から離れる側)へと突出している。また、治具ピン83が、図3に示す位置から図4に示す位置へと移動すると、フック部材85のピン当接部852の下部が治具ピン83により外側へと押圧される。これにより、フック部材85が回転軸813を中心として僅かな角度だけ回動し、フック部851が中心軸J2に向かって内側へと移動する。治具ピン83が図4に示す位置に位置する状態では、複数のフック部851は、治具本体81の外側面よりも内側に位置する。換言すれば、治具ピン83が治具本体81内に押し込まれることにより、複数のフック部851が内側へと移動し、治具ピン83が治具本体81から突出する方向に移動することにより、複数のフック部851が外側へと開くように移動する。
【0035】
後述するように、治具8では、図3に示すように、フック部851が治具本体81の外側面よりも少しだけ側方に突出した状態で、フック部材85がハンド先端部4の貫通孔42に係合し、ハンド先端部4が治具8に係止される。すなわち、フック部材85および回転軸813は、ハンド先端部4を治具本体81上にて係止するハンド先端部係止機構である。また、フック部851が内側に移動して図4に示す位置に位置することにより、フック部材85とハンド先端部4との係合が解除される。以下の説明では、図3に示すフック部材85の状態を「係止状態」といい、図4に示すフック部材85の状態を「非係止状態」という。
【0036】
図3および図4に示すように、治具8は、さらに、フック部材85の状態を検出する状態検出部86を備える。状態検出部86では、フック部材85が係止状態であること、または、非係止状態であることが検出される。状態検出部86は、反射型の光電センサ861、および、リフレクタ862を備え、光電センサ861とリフレクタ862とは、治具本体81を挟んで対向して配置される。治具本体81には、光電センサ861から治具本体81の内部空間810へと延びる貫通孔863、および、内部空間810からリフレクタ862へと延びる貫通孔864が設けられる。
【0037】
図4に示すように、フック部材85が非係止状態の場合、治具ピン83の小径部833が貫通孔863と貫通孔864との間に位置する。このため、光電センサ861から出射された可視光は、治具本体81の貫通孔863、治具ピン83の小径部833と治具本体81の内部空間810の内側面との間隙、および、貫通孔864を通過してリフレクタ862に入射する。そして、リフレクタ862により反射された可視光が、同様の経路を反対向きに通過して光電センサ861にて受光される。状態検出部86では、リフレクタ862からの反射光が光電センサ861により検出されることにより、フック部材85が非係止状態であることが検出される。
【0038】
一方、図3に示すように、フック部材85が係止状態の場合、治具ピン83の下部834が貫通孔863と貫通孔864との間に位置しており、光電センサ861から出射された可視光は、治具ピン83の下部834により遮られてリフレクタ862まで届かない。したがって、光電センサ861では、リフレクタ862からの反射光が検出されず、これにより、フック部材85が係止状態であること(より正確には、フック部材85が非係止状態ではないこと)が検出される。
【0039】
ハンド先端部4をハンド本体部3から取り外す際には、まず、図1に示すロボットアーム11によりロボットハンド2が治具8の上方へと移動され、治具8に向かって下降することにより、図3に示す治具8の治具ピン83が、図2に示すハンド先端部4の貫通孔42の下部開口から貫通孔42内に挿入されて着脱機構35のピストン352に当接する。ハンド本体部3のエア溜まり311では、圧縮エアによりピストン352に圧力が加えられた状態が維持されており、着脱機構35は固定状態となっている。このため、治具ピン83はピストン352により下向きに押圧され、治具本体81内に向かって移動する。これにより、治具8のフック部材85が係止状態から、図5.Aに示す非係止状態へと移行する。
【0040】
図5.A、および、後述する図5.Bは、着脱機構35が固定状態のロボットハンド2および治具8の断面図である。図5.Aと図5.Bとは断面位置が異なっており、図5.Aはフック部材85を含む位置の断面を示し、図5.Bはボール353を含む位置の断面を示す。また、後述する図6.Aおよび図6.Bは、着脱機構35が後述する解除状態のロボットハンド2および治具8の断面図である。図6.Aと図6.Bとは断面位置が異なっており、図6.Aはフック部材85を含む位置の断面を示し、図6.Bはボール353を含む位置の断面を示す。
【0041】
ハンド本体部3のエア溜まり311が大気開放されると、着脱機構35において圧縮エアによるピストン352への圧力が解放される。そして、治具8のバネ84の復元力により、治具ピン83が着脱機構35のピストン352を押圧しつつ治具本体81から突出する方向へと移動する。これにより、図6.Aに示すように、ピストン352が固定位置よりも上側へと移動し、当該移動に伴って、図6.Bに示すように、複数のボール353が着脱凸部351の孔内部へと戻って(すなわち、元の位置へと戻って)貫通孔42との係合が解除される。その結果、ハンド本体部3とハンド先端部4との固定が解除される。
【0042】
以下の説明では、図6.Aおよび図6.Bに示すように、エア溜まり311の底部から上方に離間しているピストン352の位置を「解除位置」といい、ピストン352が解除位置に位置する着脱機構35の状態を「解除状態」という。ピストン352は、解除位置と図2に示す固定位置との間にて進退し、基体31の下部は、ピストン352の一部が収容されるシリンダの役割を果たす。
【0043】
ロボットハンドシステム10では、治具8において治具ピン83が上方へと移動することにより、上述のように、着脱機構35が、ハンド先端部4を固定する固定状態から、ハンド先端部4の固定が解除された解除状態へと移行し、ハンド先端部4がハンド本体部3から取り外される。また、治具ピン83が上方へと移動することにより、着脱機構35の当該移行と並行して、図6.Aに示すように、フック部材85が非係止状態から係止状態へと移行し、ハンド先端部4がフック部材85のフック部851により治具8に係止される。その後、ロボットアーム11(図1参照)が上方へと移動することにより、ハンド本体部3がハンド先端部4から離間する。
【0044】
次に、ハンド本体部3にハンド先端部4を取り付ける際の動作について説明する。まず、図6.Bに示すように、治具8に係止されたハンド先端部4の貫通孔42に、ハンド本体部3の着脱機構35が挿入され、着脱機構35のピストン352が治具8の治具ピン83に当接する。ハンド本体部3では、エア溜まり311が大気開放されており、治具8では、治具ピン83がバネ84により治具本体81から突出する方向に押圧されている。このため、ピストン352は、治具ピン83によりエア溜まり311側へと押し込まれ、固定位置から解除位置へと移動する。また、フック部材85は、図6.Aに示すように、係止状態のまま維持される。
【0045】
続いて、エア溜まり311に圧縮エアが供給されることにより、ピストン352が解除位置から図5.Bに示す固定位置へと移動し、当該移動に伴い、着脱機構35の複数のボール353が着脱凸部351から側方へと突出してハンド先端部4の貫通孔42と係合する。換言すれば、圧縮エアによる圧力により着脱機構35が解除状態から固定状態へと移行し、ハンド先端部4がハンド本体部3に取り付けられる。
【0046】
また、ピストン352の上記移動により、図5.Aに示すように、治具8の治具ピン83が治具本体81側へと押し込まれ、フック部材85が係止状態から非係止状態へと移行する。これにより、フック部材85によるハンド先端部4の係止が解除される。そして、状態検出部86により、フック部材85が非係止状態へと移行したことが検出されると、ロボットアーム11が上昇し、ハンド先端部4がハンド本体部3に固定された状態で治具8から離間する。
【0047】
以上に説明したように、ロボットハンド2では、ハンド本体部3に設けられた着脱機構35において圧縮エアによる圧力が解放された状態で、ハンド先端部4の貫通孔42の下部開口から挿入される治具8により着脱機構35が押圧されることにより、着脱機構35が固定状態から解除状態へと移行する。このように、ロボットハンド2では、着脱機構35を固定状態から解除状態へと移行させるための機構をハンド本体部3やハンド先端部4に設ける必要がなく、簡単な構造でハンド先端部4の取り外しを行うことができる。その結果、組立ロボット1およびロボットハンドシステム10の製造コストを低減することができる。
【0048】
また、上述のように、着脱凸部351、ピストン352および複数のボール353により、着脱機構35を容易に実現することができる。なお、ピストン352の解除位置と固定位置との間の進退に伴って着脱機構35を解除状態と固定状態との間で移行する着脱係止部として、複数のボール353に代えて、他の様々な構造(例えば、着脱凸部351から側方へ突出することにより着脱機構35を固定状態とするフック部材)が利用されてよい。
【0049】
ロボットハンド2では、ツール用流路を形成するツール用流路部がハンド本体部3およびハンド先端部4に設けられ、着脱機構35にも供給されるエア溜まり311内の圧縮エアにより、当該ツール用流路を介して複数の把持部5が駆動される。このような構造を採用することにより、ロボットハンド2に圧縮エアを供給するための配管を減らすことができ、ロボットハンド2の構造を簡素化することができる。
【0050】
ロボットハンドシステム10では、ロボットハンド2のハンド本体部3からのハンド先端部4の取り外しに利用されるとともに、取り外された後のハンド先端部4を保持する複数の治具8が設けられ、ハンド本体部3に着脱自在に装着される複数のハンド先端部4が、複数の治具8に保持され、または、ハンド本体部3に固定される。これにより、様々な種類のツールを備える複数種類のハンド先端部4を交換しつつ順次使用して作業を迅速に行うことができる。
【0051】
ロボットハンドシステム10では、治具8にハンド先端部4を係止するフック部材85が設けられ、ロボットハンド2の着脱機構35の固定状態から解除状態への移行に伴ってフック部材85が非係止状態から係止状態へと移行することにより、ハンド先端部4をハンド本体部3から取り外して確実に治具8へと受け渡すことができる。また、着脱機構35の状態移行とフック部材85の状態移行とが、治具8のバネ84の復元力により並行して行われることにより、治具8の構成および動作の制御を簡素化することができ、着脱機構35およびフック部材85の状態移行の連動ミスによる誤動作を防止することができる。さらに、治具8の向きに拘わらず、治具8によりハンド先端部4を安定して保持することができるため、治具8の配置の自由度が向上し、ロボットハンドシステム10を小型化することができる。治具8は、例えば、治具ピン83が治具本体81から重力方向の下側に向かって突出するように配置されてもよく、あるいは、重力方向に垂直な方向に向かって突出するように配置されてもよい。
【0052】
上述のように、ロボットハンドシステム10では、着脱機構35の解除状態から固定状態への移行に伴ってフック部材85が係止状態から非係止状態へと移行し、フック部材85の非係止状態が状態検出部86により検出される。そして、当該検出が行われた後、ロボットアーム11が移動してロボットハンド2が治具8から離間する。これにより、ハンド先端部4が治具8に係止された状態で誤ってハンド先端部4を治具8から離間させてしまうことが防止されるため、ハンド先端部4や治具8の破損を防止することができる。
【0053】
以上、本発明の実施の形態について説明してきたが、本発明は上記実施の形態に限定されるものではなく、様々な変更が可能である。
【0054】
例えば、ハンド先端部4には、必ずしもツール取付部411が設けられる必要はなく、先端部本体41に様々なツールが直接設けられてもよい。また、ハンド先端部4に設けられるツールの個数も様々に変更されてよい。上述のロボットハンド2や治具8の構造は、組み立て以外の様々な動作を行うロボットハンドシステムに適用されてよい。
【0055】
治具8では、状態検出部86は必ずしも光電センサ861およびリフレクタ862を備える必要はなく、様々な構成の状態検出部86が設けられてよい。例えば、状態検出部86では、バネ84の圧縮状態を測定することにより係止状態または非係止状態が検出されてもよい。
【0056】
上記実施の形態および各変形例における構成は、相互に矛盾しない限り適宜組み合わされてよい。
【符号の説明】
【0057】
2 ロボットハンド
3 ハンド本体部
4 ハンド先端部
5 把持部
8 治具
10 ロボットハンドシステム
11 ロボットアーム
31 基体
33 電磁弁
35 着脱機構
41 先端部本体
42 貫通孔
81 治具本体
83 治具ピン
84 バネ
85 フック部材
86 状態検出部
311 エア溜まり
312 流路
351 着脱凸部
352 ピストン
353 ボール
411 ツール取付部
【特許請求の範囲】
【請求項1】
ロボットアームの先端に設けられるロボットハンドであって、
前記ロボットアームに取り付けられるハンド本体部と、
前記ハンド本体部に着脱自在に装着されるハンド先端部と、
を備え、
前記ハンド本体部が、
圧縮エアによる圧力により、前記ハンド先端部の固定が解除された解除状態から前記ハンド先端部を固定する固定状態へと移行し、前記圧縮エアによる圧力が解放されても前記固定状態を維持する着脱機構と、
前記着脱機構に圧縮エアを供給する流路を形成する着脱用流路部と、
を備え、
前記ハンド先端部が、一方の開口から前記着脱機構が挿入される貫通孔を備え、
前記着脱機構において前記圧縮エアによる圧力が解放された状態で、前記貫通孔の他方の開口から挿入される治具により前記着脱機構を押圧することにより、前記着脱機構が前記固定状態から前記解除状態へと移行することを特徴とするロボットハンド。
【請求項2】
請求項1に記載のロボットハンドであって、
前記着脱機構が、
前記貫通孔に挿入される着脱凸部と、
解除位置と固定位置との間にて進退するピストンと、
前記圧縮エアによる前記ピストンの前記解除位置から前記固定位置への移動に伴って前記着脱凸部から側方へと突出し、前記貫通孔と係合することにより前記着脱機構を前記固定状態とし、前記ピストンの前記固定位置から前記解除位置への移動に伴って元の位置へと戻ることにより、前記着脱機構を前記解除状態とする着脱係止部と、
を備えることを特徴とするロボットハンド。
【請求項3】
請求項1または2に記載のロボットハンドであって、
前記ハンド本体部および前記ハンド先端部が、前記固定状態にて一繋がりの流路を形成して前記ハンド先端部に取り付けられるツールと前記着脱用流路部とを接続するツール用流路部を備え、
前記ハンド本体部または前記ハンド先端部が、前記ツール用流路部上に設けられた切換弁を備え、
前記ツールが、前記着脱用流路部内の圧縮エアにより駆動されることを特徴とするロボットハンド。
【請求項4】
ロボットハンドシステムであって、
請求項1ないし3のいずれかに記載のロボットハンドと、
前記ロボットハンドが取り付けられるロボットアームと、
前記ロボットハンドの前記ハンド本体部からの前記ハンド先端部の取り外しに利用されるとともに取り外された後の前記ハンド先端部を保持する前記治具と、
前記ハンド先端部と同様に、前記ハンド本体部に着脱自在に装着される他のハンド先端部と、
前記治具と同様の構造を有し、前記ハンド本体部からの前記他のハンド先端部の取り外しに利用されるとともに取り外された後の前記他のハンド先端部を保持する他の治具と、
を備えることを特徴とするロボットハンドシステム。
【請求項5】
請求項4に記載のロボットハンドシステムであって、
前記治具が、
治具本体と、
前記治具本体から突出する治具ピンと、
前記治具ピンを前記治具本体から突出する方向へと押圧する付勢手段と、
を備え、
前記ハンド先端部の取り外しの際に、前記治具ピンが前記ハンド先端部の前記貫通孔に挿入され、前記付勢手段により押圧される前記治具ピンにより前記着脱機構が押圧されて移動することにより、前記着脱機構が前記固定状態から前記解除状態へと移行し、前記ハンド先端部が前記ハンド本体部から取り外されることを特徴とするロボットハンドシステム。
【請求項6】
請求項5に記載のロボットハンドシステムであって、
前記治具が、前記治具本体上にて前記ハンド先端部を係止するハンド先端部係止機構をさらに備え、
前記ハンド先端部の取り外しの際に、前記ハンド先端部の前記貫通孔に挿入された前記治具ピンが、前記圧縮エアによる圧力が加えられた前記固定状態の前記着脱機構により押圧されて前記治具本体内に向かって移動することにより、前記ハンド先端部係止機構が非係止状態とされた後、前記着脱機構において前記圧縮エアによる圧力が解放されることにより、前記着脱機構の前記固定状態から前記解除状態への前記移行が行われるとともに、前記移行と並行して前記ハンド先端部係止機構が前記非係止状態から係止状態へと移行し、前記ハンド先端部を前記治具本体上に係止することを特徴とするロボットハンドシステム。
【請求項7】
請求項6に記載のロボットハンドシステムであって、
前記治具が、前記ハンド先端部係止機構が前記係止状態であること、または、前記非係止状態であることを検出する状態検出部をさらに備えることを特徴とするロボットハンドシステム。
【請求項1】
ロボットアームの先端に設けられるロボットハンドであって、
前記ロボットアームに取り付けられるハンド本体部と、
前記ハンド本体部に着脱自在に装着されるハンド先端部と、
を備え、
前記ハンド本体部が、
圧縮エアによる圧力により、前記ハンド先端部の固定が解除された解除状態から前記ハンド先端部を固定する固定状態へと移行し、前記圧縮エアによる圧力が解放されても前記固定状態を維持する着脱機構と、
前記着脱機構に圧縮エアを供給する流路を形成する着脱用流路部と、
を備え、
前記ハンド先端部が、一方の開口から前記着脱機構が挿入される貫通孔を備え、
前記着脱機構において前記圧縮エアによる圧力が解放された状態で、前記貫通孔の他方の開口から挿入される治具により前記着脱機構を押圧することにより、前記着脱機構が前記固定状態から前記解除状態へと移行することを特徴とするロボットハンド。
【請求項2】
請求項1に記載のロボットハンドであって、
前記着脱機構が、
前記貫通孔に挿入される着脱凸部と、
解除位置と固定位置との間にて進退するピストンと、
前記圧縮エアによる前記ピストンの前記解除位置から前記固定位置への移動に伴って前記着脱凸部から側方へと突出し、前記貫通孔と係合することにより前記着脱機構を前記固定状態とし、前記ピストンの前記固定位置から前記解除位置への移動に伴って元の位置へと戻ることにより、前記着脱機構を前記解除状態とする着脱係止部と、
を備えることを特徴とするロボットハンド。
【請求項3】
請求項1または2に記載のロボットハンドであって、
前記ハンド本体部および前記ハンド先端部が、前記固定状態にて一繋がりの流路を形成して前記ハンド先端部に取り付けられるツールと前記着脱用流路部とを接続するツール用流路部を備え、
前記ハンド本体部または前記ハンド先端部が、前記ツール用流路部上に設けられた切換弁を備え、
前記ツールが、前記着脱用流路部内の圧縮エアにより駆動されることを特徴とするロボットハンド。
【請求項4】
ロボットハンドシステムであって、
請求項1ないし3のいずれかに記載のロボットハンドと、
前記ロボットハンドが取り付けられるロボットアームと、
前記ロボットハンドの前記ハンド本体部からの前記ハンド先端部の取り外しに利用されるとともに取り外された後の前記ハンド先端部を保持する前記治具と、
前記ハンド先端部と同様に、前記ハンド本体部に着脱自在に装着される他のハンド先端部と、
前記治具と同様の構造を有し、前記ハンド本体部からの前記他のハンド先端部の取り外しに利用されるとともに取り外された後の前記他のハンド先端部を保持する他の治具と、
を備えることを特徴とするロボットハンドシステム。
【請求項5】
請求項4に記載のロボットハンドシステムであって、
前記治具が、
治具本体と、
前記治具本体から突出する治具ピンと、
前記治具ピンを前記治具本体から突出する方向へと押圧する付勢手段と、
を備え、
前記ハンド先端部の取り外しの際に、前記治具ピンが前記ハンド先端部の前記貫通孔に挿入され、前記付勢手段により押圧される前記治具ピンにより前記着脱機構が押圧されて移動することにより、前記着脱機構が前記固定状態から前記解除状態へと移行し、前記ハンド先端部が前記ハンド本体部から取り外されることを特徴とするロボットハンドシステム。
【請求項6】
請求項5に記載のロボットハンドシステムであって、
前記治具が、前記治具本体上にて前記ハンド先端部を係止するハンド先端部係止機構をさらに備え、
前記ハンド先端部の取り外しの際に、前記ハンド先端部の前記貫通孔に挿入された前記治具ピンが、前記圧縮エアによる圧力が加えられた前記固定状態の前記着脱機構により押圧されて前記治具本体内に向かって移動することにより、前記ハンド先端部係止機構が非係止状態とされた後、前記着脱機構において前記圧縮エアによる圧力が解放されることにより、前記着脱機構の前記固定状態から前記解除状態への前記移行が行われるとともに、前記移行と並行して前記ハンド先端部係止機構が前記非係止状態から係止状態へと移行し、前記ハンド先端部を前記治具本体上に係止することを特徴とするロボットハンドシステム。
【請求項7】
請求項6に記載のロボットハンドシステムであって、
前記治具が、前記ハンド先端部係止機構が前記係止状態であること、または、前記非係止状態であることを検出する状態検出部をさらに備えることを特徴とするロボットハンドシステム。
【図1】


【図2】
【図3】
【図4】
【図5.A】
【図5.B】
【図6.A】
【図6.B】
【図2】
【図3】
【図4】
【図5.A】
【図5.B】
【図6.A】
【図6.B】
【公開番号】特開2013−94892(P2013−94892A)
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願番号】特願2011−239201(P2011−239201)
【出願日】平成23年10月31日(2011.10.31)
【出願人】(000000309)IDEC株式会社 (188)
【Fターム(参考)】
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願日】平成23年10月31日(2011.10.31)
【出願人】(000000309)IDEC株式会社 (188)
【Fターム(参考)】
[ Back to top ]