
ロボットハンド
【課題】配線によりロボットハンドやロボットアームの可動範囲が制限されることを抑制するとともに把持部の種類を容易に変更する。
【解決手段】組立ロボットでは、制御部から固定部31へと出力された把持部制御信号および結合部制御信号が、スリップリング35を介して回転部32へと伝達され、また、把持状態取得部から出力された把持状態信号が、回転部32からスリップリング35を介して固定部31へと伝達されて制御部へと送られる。このため、固定部31と回転部32との間における信号伝達用の配線が外部に露出することを抑制することができ、配線によりロボットハンドやロボットアームの可動範囲が制限されてしまうことを抑制することができる。また、ロボットハンドでは、把持部および把持状態取得部を備えるハンド先端部が、結合部323により回転部32に対して着脱自在に固定されるため、把持部の種類を容易に変更することができる。
【解決手段】組立ロボットでは、制御部から固定部31へと出力された把持部制御信号および結合部制御信号が、スリップリング35を介して回転部32へと伝達され、また、把持状態取得部から出力された把持状態信号が、回転部32からスリップリング35を介して固定部31へと伝達されて制御部へと送られる。このため、固定部31と回転部32との間における信号伝達用の配線が外部に露出することを抑制することができ、配線によりロボットハンドやロボットアームの可動範囲が制限されてしまうことを抑制することができる。また、ロボットハンドでは、把持部および把持状態取得部を備えるハンド先端部が、結合部323により回転部32に対して着脱自在に固定されるため、把持部の種類を容易に変更することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、組立ロボットのロボットアームの先端に設けられるロボットハンドに関する。
【背景技術】
【0002】
従来より、自動組立ライン等において組立ロボットが用いられており、組立ロボットでは、ワークを把持するロボットハンドがロボットアームに接続されることにより3次元的に移動可能とされる。ロボットハンドでは、圧縮エアを用いた把持部の駆動により、ワークの把持および解放が行われる。
【0003】
特許文献1のロボットでは、ロボットアームの先端にマニホールドが回動不能に取り付けられ、当該マニホールドには、ハンドホルダを介してハンドが取り付けられる。ハンドを駆動するための圧縮エア用ホースは、ハンドおよびハンドホルダの外側面に接続されており、ハンドホルダおよびマニホールドの内部には、当該ホースから連続する内部流路が形成される。マニホールドには、圧縮エアの供給および排出を制御する複数の電磁弁が環状に配置される。複数の電磁弁は、マニホールドに設けられたインターフェイス部にケーブルを介して接続され、インターフェイス部はロボットの制御部にケーブルを介して接続される。
【0004】
特許文献2のロボットでは、ロボットアームの先端に筒状の固定フランジが回動不能に固定され、固定フランジの軸穴に挿入された回転軸が、ロボットアームの回転リストの先端にボルト締めにより固定される。回転軸の先端側に設けられたターレット板には複数の把持部が接続される。固定フランジの外側面には、把持部を駆動するための圧縮エア用のホースが接続されており、圧縮エアは固定フランジ内に形成された流路により回転軸の外側面に向けて導かれる。回転軸の外側面には環状の凹部が形成されており、圧縮エアは、当該凹部と固定フランジの内側面とにより形成される環状の流路、および、当該流路から軸方向に伸びる流路を介してターレット板へと導かれ、複数の電磁弁を介して複数の把持部のそれぞれに供給される。
【0005】
また、回転軸の外側面には集電リングが設けられ、固定フランジに当該集電リングに接触する集電ブラシを設けることにより、固定フランジと回転軸とを電気的に接続するスリップリングが形成される。特許文献2のロボットでは、回転軸の軸方向に複数のスリップリングが配列されており、給電部からケーブルを介して固定フランジへと供給される電力および制御信号が、これらのスリップリングを介して複数の電磁弁へと送られる。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特許第3172028号公報
【特許文献2】特開2009−269125号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
ところで、特許文献1のロボットでは、制御部からロボットハンドの複数の電磁弁へと電力や制御信号を送るために、制御部とロボットハンドとがケーブルにより接続されており、これらのケーブルは、ロボットハンドやロボットアームの外部に露出して配置される。仮に、特許文献1のロボットにおいてロボットハンドが回転可能であるとすると、ロボットハンドとロボットアームとを接続するケーブルがロボットハンドの回転により切断されることがないように、ロボットハンドの回転可能範囲に大きな制限が設けられる。
【0008】
特許文献2のロボットでは、把持部が設けられるターレット板がロボットアームにボルト締めにより固定されるため、把持部の種類を容易に変更することができない。また、回転軸の軸方向に複数のスリップリングが配列されるため、ターレット板と固定フランジとの間で授受する電力や信号量が増大してスリップリングが大型化すると、回転軸も長くなってロボットが大型化してしまう。
【0009】
本発明は、上記課題に鑑みなされたものであり、配線によりロボットハンドやロボットアームの可動範囲が制限されることを抑制するとともに把持部の種類を容易に変更することを主な目的としている。
【課題を解決するための手段】
【0010】
請求項1に記載の発明は、組立ロボットのロボットアームの先端に設けられるロボットハンドであって、回転軸が挿入される固定部と、前記固定部に隣接し、前記回転軸を中心として回転する回転部と、前記回転部に着脱自在に取り付けられる先端部と、前記固定部と前記回転部との間に配置されて電気信号を伝達するスリップリングとを備え、前記先端部が、ワークを把持する把持部と、前記把持部によるワークの把持状態を取得する把持状態取得部とを備え、前記回転部が、前記先端部を着脱自在に固定する着脱機構を備え、制御部から前記固定部へと出力された前記把持部を制御する信号、および、前記着脱機構による前記先端部の固定および分離を切り替える信号がそれぞれ、前記固定部から前記スリップリングを介して前記把持部および前記着脱機構へと伝達され、前記把持状態取得部から出力された信号が、前記回転部から前記スリップリングを介して前記固定部へと伝達されて前記制御部へと送られる。
【0011】
請求項2に記載の発明は、請求項1に記載のロボットハンドであって、前記スリップリングにおける電気的接点が、前記回転軸に垂直な面内に位置する。
【0012】
請求項3に記載の発明は、請求項1または2に記載のロボットハンドであって、前記把持部が、前記回転部および前記先端部の内部に形成された把持用流路内の流体を介して駆動される。
【0013】
請求項4に記載の発明は、請求項1ないし3のいずれかに記載のロボットハンドであって、前記着脱機構が、前記回転部の内部に形成された着脱用流路内の流体を介して駆動される。
【0014】
請求項5に記載の発明は、請求項1ないし4のいずれかに記載のロボットハンドであって、前記把持状態取得部から出力された信号を前記スリップリングへと導く配線が、前記先端部および前記回転部の内部に配置される。
【発明の効果】
【0015】
本発明では、配線によりロボットハンドやロボットアームの可動範囲が制限されてしまうことを抑制するとともに把持部の種類を容易に変更することができる。
【図面の簡単な説明】
【0016】
【図1】一の実施の形態に係る組立ロボットの側面図である。
【図2】ハンド本体部近傍の部分断面図である。
【図3】ハンド本体部の底面図である。
【図4】ハンド先端部の側面図である。
【図5】ハンド先端部の底面図である。
【図6】把持部近傍を拡大して示す正面図である。
【図7】把持部近傍を拡大して示す側面図である。
【図8.A】把持部および把持状態取得部を示す図である。
【図8.B】把持部および把持状態取得部を示す図である。
【図8.C】把持部および把持状態取得部を示す図である。
【発明を実施するための形態】
【0017】
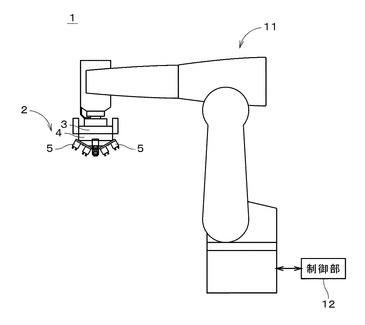
図1は、本発明の一の実施の形態に係る組立ロボット1の側面図である。組立ロボット1は、多数の部品から構成される組立体を自動的に組み立てる自動組立ライン等において用いられる産業用ロボットである。図1の組立ロボット1は、多自由度(例えば、6自由度)のロボットアーム11、ロボットアーム11の先端に設けられるロボットハンド2、および、組立ロボット1の全体制御を担う制御部12を備え、ロボットアーム11によりロボットハンド2が3次元的に移動可能とされる。ロボットハンド2は、ロボットアーム11に取り付けられるハンド本体部3、および、ハンド本体部3に着脱自在に装着されるハンド先端部4を備え、ハンド先端部4にはワークを把持する複数の把持部5が設けられる。
【0018】
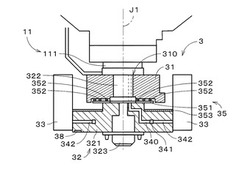
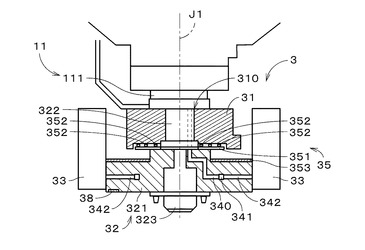
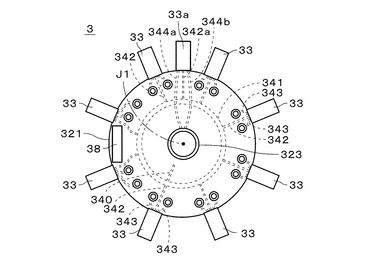
図2は、ハンド先端部4を取り外した状態のハンド本体部3近傍の部分断面図であり、図3は、ハンド本体部3の底面図である。図2は、電磁弁33の位置での断面を示している。図2に示すように、ハンド本体部3は、ロボットハンド2の上下方向(図2中の上下方向に対応する方向であり、重力方向に一致するとは限らない。図4においても同様。)に伸びる中心軸J1を中心とする固定部31および回転部32を備える。固定部31は、上下方向に貫通する貫通穴310を中央部に有する略円筒状であり、ロボットアーム11の先端部のフレームに回動不能に固定される。回転部32は、略円板状の回転部本体321、回転部本体321の上面の中央部から図2中の上側に突出する回転軸322(以下、「ハンド回転軸322」という。)、および、回転部本体321の下面の中央部から下側に突出する結合部323を備える。ハンド回転軸322および結合部323は、中心軸J1を中心とする略円柱状である。
【0019】
ハンド回転軸322は、固定部31の貫通穴310に挿入され、ロボットアーム11の先端部に設けられた回転軸111(ロボットアーム11が有する回転軸であり、以下、「アーム回転軸111」という。)に接続される。ハンド回転軸322がアーム回転軸111に接続された状態では、アーム回転軸111の中心軸は、ハンド回転軸322の中心軸J1に一致するため、以下、アーム回転軸111の中心軸にも符号J1を付す。組立ロボット1では、回転部32の回転部本体321が固定部31の下側に隣接しており、アーム回転軸111が回転することにより、回転部32が、アーム回転軸111およびハンド回転軸322の中心軸(すなわち、中心軸J1)を中心としてアーム回転軸111と共に回転する。
【0020】
結合部323は、ハンド先端部4(図4参照)が回転部32に対して取り付けられる際に、ハンド先端部4の結合穴42(図4参照)に挿入されて結合穴42に結合する。また、結合部323と結合穴42との結合が解除されることにより、ハンド先端部4が回転部32から取り外される。ロボットハンド2では、結合部323は、ハンド先端部4を着脱自在に固定する着脱機構である。
【0021】
ロボットハンド2は、固定部31と回転部32との間に配置されて電気信号を伝達するスリップリング35をさらに備える。スリップリング35は、いわゆるディスク式スリップリングであり、ハンド回転軸322に固定される円環板状のディスク基板351、および、固定部31に固定される複数の接触子352を備える。接触子352は、固定部31およびロボットアーム11の内部に配置された配線を介して制御部12(図1参照)に接続される。
【0022】
ディスク基板351はハンド回転軸322の中心軸J1に垂直に配置され、ディスク基板351の上面には、ハンド回転軸322を中心とする同心円状に配置された複数のリングが設けられる。当該複数のリングは電気的に互いに絶縁されており、複数のリングのそれぞれに接触子352が接触することにより、固定部31から回転部32への電力の供給、および、固定部31と回転部32との間における信号の授受が行われる。ロボットハンド2では、スリップリング35における複数の電気的接点が、ハンド回転軸322の中心軸J1に垂直な面内に位置する。
【0023】
回転部本体321の上面には、略円環板状の通信用基板353が設けられ、回転部本体321の内部に配置された配線を介してスリップリング35のディスク基板351に接続される。通信用基板353は、また、回転部本体321の下面に設けられた第1接続用基板38に、回転部本体321の内部に配置された配線を介して接続される。
【0024】
図3に示すように、回転部本体321の外側面には、中心軸J1を中心として環状に配置される複数の電磁弁33,33aが設けられる。本実施の形態では、8つの電磁弁33が中心軸J1を中心としておよそ等間隔にて配置され、1つの電磁弁33aが電磁弁33の間に設けられる。電磁弁33,33aは、回転部本体321の内部に配置された配線(図示省略)を介して、図2に示す通信用基板353に接続される。図2では、2つの電磁弁33のみが描かれている。
【0025】
図2および図3に示すように、回転部本体321の内部には、中心軸J1を中心とする略円環状の内部流路341が形成されており、複数の電磁弁33,33aはそれぞれ、回転部本体321の内部にて中心軸J1へと向かう内部流路342,342aを介して内部流路341に接続される。内部流路341は、回転部本体321およびハンド回転軸322の内部に形成された内部流路340に接続され、内部流路340はロボットアーム11のアーム回転軸111の内部へと連続してエア供給源に接続される。なお、内部流路340は、ハンド回転軸322の外側面に形成された円周状の流路を介して、固定部31の内部に形成された内部流路へと連続してもよい。固定部31の内部流路は、ロボットアーム11の内部に形成された内部流路を介してエア供給源に接続されてもよく、固定部31の外側面へとチューブにて連結されるエア供給源に接続されてもよい。
【0026】
図3に示すように、上述の結合部323は、内部流路344a,344bを介して電磁弁33aに接続される。電磁弁33aを駆動するための信号は、制御部12(図1参照)からロボットアーム11および固定部31のそれぞれの内部に配置された内部配線を介してスリップリング35へと送られ、スリップリング35を介して固定部31から回転部32の電磁弁33aへと送られる。そして、当該信号に基づいて電磁弁33aの制御が行われる。組立ロボット1では、電磁弁33aから内部流路344aを介して結合部323に圧縮エアが供給されることにより、複数の結合用ボールが結合部323の外周面から突出し、結合穴42(図4参照)の内側面に形成された溝部に嵌合する。これにより、ハンド先端部4と回転部32とが結合される。また、電磁弁33aから内部流路344bを介して結合部323に圧縮エアが供給されることにより、複数の結合用ボールが結合部323の内部に収容される。これにより、ハンド先端部4と回転部32との結合が解除される。
【0027】
このように、組立ロボット1では、制御部12から固定部31へと出力された結合部323によるハンド先端部4の固定および分離を切り換える信号(以下、「結合部制御信号」という。)が、固定部31からスリップリング35を介して結合部323へと伝達される。結合部323は、回転部32の内部に形成された内部流路340,341,342a,344a,344b(以下、「着脱用流路」という。)内の流体を介して駆動される。
【0028】
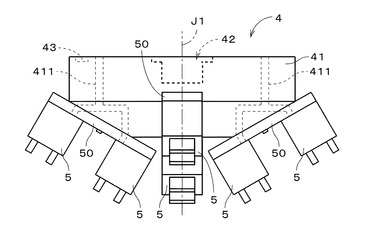
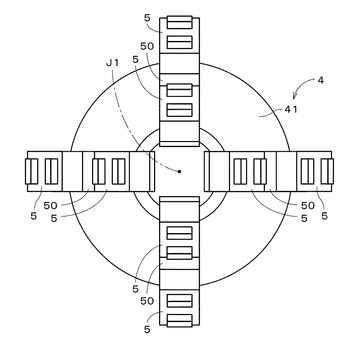
図4および図5はそれぞれ、ハンド先端部4の側面図および底面図である。ハンド先端部4がハンド本体部3に装着された状態では、ハンド先端部4の中心軸と、ハンド本体部3の中心軸J1とが一致するため、以下の説明では、ハンド先端部4の中心軸にも符号J1を付す。ハンド先端部4は、中心軸J1を中心とする略円柱状の先端部本体41を有し、先端部本体41の下部には複数の把持部5が接続される。また、図4に示すように、先端部本体41の上面(図中の上側の面)の中央部には、中心軸J1を中心とする上述の結合穴42が形成されており、上面の外縁近傍には、回転部本体321の第1接続用基板38(図3参照)に接続される第2接続用基板43が設けられる。
【0029】
本実施の形態では、図5に示すように、4つのベースブロック50が先端部本体41に接続され、各ベースブロック50に2つの把持部5が設けられる。各ベースブロック50の2つの把持部5は、図4に示す先端部本体41の内部に形成された内部流路411、および、回転部本体321の内部に形成された内部流路343(図3参照)を介して、対応する1つの電磁弁33に接続される。すなわち、4つの電磁弁33が4つのベースブロック50に接続され、他の4つの電磁弁33は使用されない。
【0030】
組立ロボット1では、電磁弁33を駆動するための信号が、制御部12(図1参照)からロボットアーム11および固定部31のそれぞれの内部に配置された内部配線を介してスリップリング35へと送られ、スリップリング35を介して固定部31から回転部32の複数の電磁弁33へと送られる。そして、当該信号に基づいて電磁弁33の制御が行われ、回転部32の内部に形成された内部流路340,341,342,343、および、ハンド先端部4の内部に形成された内部流路411を介して圧縮エアが供給されることにより、ベースブロック50上の2つの把持部5が同時に駆動される。換言すれば、制御部12から固定部31へと出力された把持部5を制御する信号(以下、「把持部制御信号」という。)が、固定部31からスリップリング35を介して把持部5へと伝達される。把持部5は、内部流路340,341,342,343,411(以下、「把持用流路」という。)内の流体を介して駆動される。なお、1つのベースブロック50上の2つの把持部5を個別に駆動する場合には、一方の把持部5が、他の電磁弁33に接続される他の内部流路にチューブ等により接続される。
【0031】
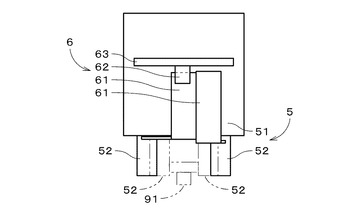
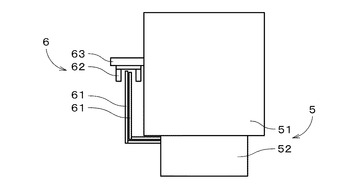
図6および図7はそれぞれ、1つの把持部5近傍を拡大して示す正面図および側面図である。図6および図7では、図の理解を容易にするために、先端を下側に向けて把持部5を描いている。把持部5は、把持部本体51、および、把持部本体51の下側に配置される2つの爪部52を備える。把持部5によりワークが把持される際には、電磁弁33(図2および図3参照)による制御により、2つの爪部52が図6中の左右方向において互いに近づくように移動し、2つの爪部52の間にワーク91が挟持される。図6中では、ワーク91、および、ワーク91を把持した状態の爪部52を二点鎖線にて示す。ワークの把持が解除される際には、電磁弁33による制御により、2つの爪部52が図6中の左右方向において互いに離間するように移動し、2つの爪部52がワークから離間する。
【0032】
図6および図7に示すように、各把持部5の把持部本体51には、把持部5によるワークの把持状態を取得する把持状態取得部6が取り付けられる。把持状態取得部6は、2つの爪部52にそれぞれ接続されて爪部52と共に移動する2つの遮光部61、2つの遮光部61を挟むように配置されるフォトカプラ62、および、フォトカプラ62に電力を供給するとともにフォトカプラ62からの信号を受信する状態取得用基板63を備える。
【0033】
各把持部5に対応する状態取得用基板63は、先端部本体41の内部に配置された配線を介して第2接続用基板43(図4参照)に接続されており、制御部12(図1参照)からの電力は、スリップリング35、通信用基板353、第1接続用基板38(図2参照)および第2接続用基板43を介して複数の状態取得用基板63に供給される。また、状態取得用基板63から出力された信号(ワークの把持状態を示す信号であり、以下、「把持状態信号」という。)は、ハンド先端部4の内部に配置される配線を介して第2接続用基板43へと送られ、第2接続用基板43および第1接続用基板38を介してハンド本体部3の回転部32へと送られる。そして、回転部32の内部に配置される配線、および、通信用基板353を介してスリップリング35へと導かれ、スリップリング35を介して回転部32から固定部31へと伝達される。さらに、固定部31およびロボットアーム11内の配線を介して制御部12へと送られる。
【0034】
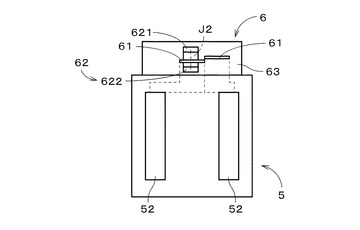
図8.Aないし図8.Cは、把持状態取得部6による把持状態信号の取得を説明するための図であり、把持部5近傍を爪部52の先端側から見た図である。図8.Aないし図8.Cでは、図の理解を容易にするために、遮光部61はその上端のみを実線にて示し、他の部位を破線にて示す。図8.Aに示すように、2つの爪部52が左右方向に最も離れている状態では、フォトカプラ62のLED621から受光素子622へと至る光路上に一方の遮光部61が位置するため、フォトカプラ62はOFFとなる。そして、ワークを把持していない状態を示す把持状態信号(以下、「非把持信号」という。)が、状態取得用基板63から制御部12(図1参照)へと送られる。図8.Aでは、フォトカプラ62のLED621から受光素子622へと至る光軸を一点鎖線にて示し、符号J2を付す(図8.Bおよび図8.Cにおいても同様)。
【0035】
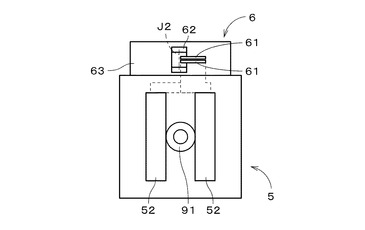
把持部5において2つの爪部52が互いに近づくように移動し、図8.Bに示すように、2つの爪部52によりワーク91が狭持される状態となると、2つの遮光部61が光軸J2から僅かにずれた位置にて重なるため、フォトカプラ62はONとなり、ワーク91を把持している状態を示す把持状態信号(以下、「把持信号」という。)が、状態取得用基板63から制御部12へと送られる。把持状態取得部6では、2つの爪部52が図8.Aに示す位置から図8.Bに示す位置へと移動する間、把持状態取得部6から制御部12へと非把持信号が連続的に送られ、2つの爪部52によりワーク91が狭持されている状態では、把持信号が連続的に送られる。そして、2つの爪部52が互いに離れるように移動してワーク91の把持が解除されると、再び非把持信号が連続的に送られる。制御部12では、把持部5がワーク91の非把持状態から把持状態へと移行し、所定の時間だけ把持状態であった後に、再度、非把持状態へと移行したと理解され、ワーク91の把持および解放が正常に行われたと判断される。
【0036】
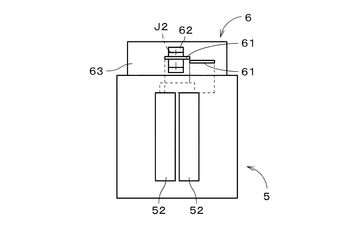
一方、把持部5によりワークを把持し損ねた場合、2つの爪部52は図8.Aに示す位置から図8.Bに示す位置を経由して図8.Cに示す位置へと移動する。図8.Cに示すように、2つの爪部52の間の左右方向の距離がワーク91(図8.B参照)の幅よりも小さい状態では、光軸J2上に他方の遮光部61(すなわち、図8.Aにおいて光軸J2上に位置するものとは異なる遮光部61)が位置するため、フォトカプラ62はOFFとなる。爪部52が図8.Aに示す位置から図8.Cに示す位置へと移動する間、状態取得用基板63から制御部12へは非把持信号が連続的に送られる。正確には、爪部52が図8.Bに示す位置を通過する極短い時間のみは、状態取得用基板63から制御部12へと把持信号が送られるが、当該把持信号は持続時間が所定の閾値よりも短いため無視される。制御部12では、ワーク91の把持は正常に行われなかったと判断される。
【0037】
以上に説明したように、組立ロボット1では、制御部12から固定部31へと出力された把持部制御信号および結合部制御信号が、スリップリング35を介して固定部31から回転部32へと伝達され、また、把持状態取得部6から出力された把持状態信号が、回転部32からスリップリング35を介して固定部31へと伝達されて制御部12へと送られる。このため、ロボットハンド2のハンド本体部3において、固定部31と回転部32との間における信号伝達用の配線が外部に露出することを抑制(または防止)することができ、配線によりロボットハンド2やロボットアーム11の可動範囲が制限されてしまうことを抑制(または防止)することができる。また、固定部31および回転部32間における配線の断線を防止して組立ロボット1の生産性低下を防止することができる。
【0038】
さらに、ロボットハンド2では、把持部5および把持状態取得部6を備えるハンド先端部4が、回転部32に対して着脱自在に固定されるため、把持部5の種類を変更する際等に、ハンド先端部4を他のハンド先端部4に交換することにより把持部5を容易に交換することができる。また、スリップリング35や電磁弁33等が設けられたハンド本体部3を交換する必要が無いため、ロボットハンド2の製造コストを低減することもできる。
【0039】
ロボットハンド2では、スリップリング35における複数の電気的接点が、ハンド回転軸322の中心軸J1に垂直な面内に位置することにより、スリップリング35の中心軸J1方向の長さを短くしてロボットハンド2を小型化することができる。
【0040】
把持部5は、回転部32およびハンド先端部4の内部に形成された把持用流路内の流体である圧縮エアを介して駆動される。このように、把持部5を駆動するための流体の配管がロボットハンド2の外部に露出することを防止することにより、配管によるロボットハンド2やロボットアーム11の可動範囲の制限を緩和することができる。また、ロボットハンド2および組立ロボット1の大型化を抑制することもできる。さらに、結合部323は、回転部32の内部に形成された着脱用流路内の流体である圧縮エアを介して駆動される。このように、結合部323を駆動するための流体の配管がロボットハンド2の外部に露出することを防止することにより、配管によるロボットハンド2やロボットアーム11の可動範囲の制限をより一層緩和することができる。また、ロボットハンド2および組立ロボット1の大型化をさらに抑制することもできる。
【0041】
ロボットハンド2では、把持状態取得部6から出力された把持状態信号をスリップリング35へと導く配線が、ハンド先端部4および回転部32の内部に配置される。このため、配線によりロボットハンド2やロボットアーム11の可動範囲が制限されてしまうことを抑制(または防止)することができるとともに、配線の断線を防止して組立ロボット1の生産性低下を防止することができる。また、配線等がロボットハンド2の外部に露出することを抑制し、ロボットハンド2および組立ロボット1の大型化を抑制することもできる。
【0042】
以上、本発明の実施の形態について説明してきたが、本発明は上記実施の形態に限定されるものではなく、様々な変更が可能である。
【0043】
例えば、ロボットハンド2の中心軸J1方向における長さが許容範囲内となるのであれば、スリップリング35は、中心軸J1を中心とする円筒面状のドラム基板、および、ドラム基板に接触する接触子を備えるドラム式スリップリングであってもよい。また、把持部5や結合部323を駆動するための流体として、圧縮エア以外のガスや駆動油等の流体が利用されてもよい。
【0044】
把持部5は、2つの爪部52によりワークを把持する構造には限定されず、4つの爪部によりワークを把持するものや、ワークを吸着するものであってもよい。ハンド先端部4には、把持部5が1つのみ設けられてもよい。把持状態取得部6では、遮光部61およびフォトカプラ62に代えて、マグネット式センサや真空スイッチ等が、把持部5によるワークの把持状態の検出に利用されてもよい。組立ロボット1では、ハンド本体部3の固定部31にアーム回転軸111が挿入されてもよい。また、ロボットハンド2がロボットアーム11と一体物として製造されてもよく、この場合、固定部31はロボットアーム11の一部と捉えられてもよい。
【0045】
上記実施の形態および各変形例における構成は、相互に矛盾しない限り適宜組み合わせられてよい。
【符号の説明】
【0046】
2 ロボットハンド
4 ハンド先端部
5 把持部
6 把持状態取得部
12 制御部
31 固定部
32 回転部
35 スリップリング
91 ワーク
322 ハンド回転軸
323 結合部
340〜343,342a,344a,344b,411 内部流路
【技術分野】
【0001】
本発明は、組立ロボットのロボットアームの先端に設けられるロボットハンドに関する。
【背景技術】
【0002】
従来より、自動組立ライン等において組立ロボットが用いられており、組立ロボットでは、ワークを把持するロボットハンドがロボットアームに接続されることにより3次元的に移動可能とされる。ロボットハンドでは、圧縮エアを用いた把持部の駆動により、ワークの把持および解放が行われる。
【0003】
特許文献1のロボットでは、ロボットアームの先端にマニホールドが回動不能に取り付けられ、当該マニホールドには、ハンドホルダを介してハンドが取り付けられる。ハンドを駆動するための圧縮エア用ホースは、ハンドおよびハンドホルダの外側面に接続されており、ハンドホルダおよびマニホールドの内部には、当該ホースから連続する内部流路が形成される。マニホールドには、圧縮エアの供給および排出を制御する複数の電磁弁が環状に配置される。複数の電磁弁は、マニホールドに設けられたインターフェイス部にケーブルを介して接続され、インターフェイス部はロボットの制御部にケーブルを介して接続される。
【0004】
特許文献2のロボットでは、ロボットアームの先端に筒状の固定フランジが回動不能に固定され、固定フランジの軸穴に挿入された回転軸が、ロボットアームの回転リストの先端にボルト締めにより固定される。回転軸の先端側に設けられたターレット板には複数の把持部が接続される。固定フランジの外側面には、把持部を駆動するための圧縮エア用のホースが接続されており、圧縮エアは固定フランジ内に形成された流路により回転軸の外側面に向けて導かれる。回転軸の外側面には環状の凹部が形成されており、圧縮エアは、当該凹部と固定フランジの内側面とにより形成される環状の流路、および、当該流路から軸方向に伸びる流路を介してターレット板へと導かれ、複数の電磁弁を介して複数の把持部のそれぞれに供給される。
【0005】
また、回転軸の外側面には集電リングが設けられ、固定フランジに当該集電リングに接触する集電ブラシを設けることにより、固定フランジと回転軸とを電気的に接続するスリップリングが形成される。特許文献2のロボットでは、回転軸の軸方向に複数のスリップリングが配列されており、給電部からケーブルを介して固定フランジへと供給される電力および制御信号が、これらのスリップリングを介して複数の電磁弁へと送られる。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特許第3172028号公報
【特許文献2】特開2009−269125号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
ところで、特許文献1のロボットでは、制御部からロボットハンドの複数の電磁弁へと電力や制御信号を送るために、制御部とロボットハンドとがケーブルにより接続されており、これらのケーブルは、ロボットハンドやロボットアームの外部に露出して配置される。仮に、特許文献1のロボットにおいてロボットハンドが回転可能であるとすると、ロボットハンドとロボットアームとを接続するケーブルがロボットハンドの回転により切断されることがないように、ロボットハンドの回転可能範囲に大きな制限が設けられる。
【0008】
特許文献2のロボットでは、把持部が設けられるターレット板がロボットアームにボルト締めにより固定されるため、把持部の種類を容易に変更することができない。また、回転軸の軸方向に複数のスリップリングが配列されるため、ターレット板と固定フランジとの間で授受する電力や信号量が増大してスリップリングが大型化すると、回転軸も長くなってロボットが大型化してしまう。
【0009】
本発明は、上記課題に鑑みなされたものであり、配線によりロボットハンドやロボットアームの可動範囲が制限されることを抑制するとともに把持部の種類を容易に変更することを主な目的としている。
【課題を解決するための手段】
【0010】
請求項1に記載の発明は、組立ロボットのロボットアームの先端に設けられるロボットハンドであって、回転軸が挿入される固定部と、前記固定部に隣接し、前記回転軸を中心として回転する回転部と、前記回転部に着脱自在に取り付けられる先端部と、前記固定部と前記回転部との間に配置されて電気信号を伝達するスリップリングとを備え、前記先端部が、ワークを把持する把持部と、前記把持部によるワークの把持状態を取得する把持状態取得部とを備え、前記回転部が、前記先端部を着脱自在に固定する着脱機構を備え、制御部から前記固定部へと出力された前記把持部を制御する信号、および、前記着脱機構による前記先端部の固定および分離を切り替える信号がそれぞれ、前記固定部から前記スリップリングを介して前記把持部および前記着脱機構へと伝達され、前記把持状態取得部から出力された信号が、前記回転部から前記スリップリングを介して前記固定部へと伝達されて前記制御部へと送られる。
【0011】
請求項2に記載の発明は、請求項1に記載のロボットハンドであって、前記スリップリングにおける電気的接点が、前記回転軸に垂直な面内に位置する。
【0012】
請求項3に記載の発明は、請求項1または2に記載のロボットハンドであって、前記把持部が、前記回転部および前記先端部の内部に形成された把持用流路内の流体を介して駆動される。
【0013】
請求項4に記載の発明は、請求項1ないし3のいずれかに記載のロボットハンドであって、前記着脱機構が、前記回転部の内部に形成された着脱用流路内の流体を介して駆動される。
【0014】
請求項5に記載の発明は、請求項1ないし4のいずれかに記載のロボットハンドであって、前記把持状態取得部から出力された信号を前記スリップリングへと導く配線が、前記先端部および前記回転部の内部に配置される。
【発明の効果】
【0015】
本発明では、配線によりロボットハンドやロボットアームの可動範囲が制限されてしまうことを抑制するとともに把持部の種類を容易に変更することができる。
【図面の簡単な説明】
【0016】
【図1】一の実施の形態に係る組立ロボットの側面図である。
【図2】ハンド本体部近傍の部分断面図である。
【図3】ハンド本体部の底面図である。
【図4】ハンド先端部の側面図である。
【図5】ハンド先端部の底面図である。
【図6】把持部近傍を拡大して示す正面図である。
【図7】把持部近傍を拡大して示す側面図である。
【図8.A】把持部および把持状態取得部を示す図である。
【図8.B】把持部および把持状態取得部を示す図である。
【図8.C】把持部および把持状態取得部を示す図である。
【発明を実施するための形態】
【0017】
図1は、本発明の一の実施の形態に係る組立ロボット1の側面図である。組立ロボット1は、多数の部品から構成される組立体を自動的に組み立てる自動組立ライン等において用いられる産業用ロボットである。図1の組立ロボット1は、多自由度(例えば、6自由度)のロボットアーム11、ロボットアーム11の先端に設けられるロボットハンド2、および、組立ロボット1の全体制御を担う制御部12を備え、ロボットアーム11によりロボットハンド2が3次元的に移動可能とされる。ロボットハンド2は、ロボットアーム11に取り付けられるハンド本体部3、および、ハンド本体部3に着脱自在に装着されるハンド先端部4を備え、ハンド先端部4にはワークを把持する複数の把持部5が設けられる。
【0018】
図2は、ハンド先端部4を取り外した状態のハンド本体部3近傍の部分断面図であり、図3は、ハンド本体部3の底面図である。図2は、電磁弁33の位置での断面を示している。図2に示すように、ハンド本体部3は、ロボットハンド2の上下方向(図2中の上下方向に対応する方向であり、重力方向に一致するとは限らない。図4においても同様。)に伸びる中心軸J1を中心とする固定部31および回転部32を備える。固定部31は、上下方向に貫通する貫通穴310を中央部に有する略円筒状であり、ロボットアーム11の先端部のフレームに回動不能に固定される。回転部32は、略円板状の回転部本体321、回転部本体321の上面の中央部から図2中の上側に突出する回転軸322(以下、「ハンド回転軸322」という。)、および、回転部本体321の下面の中央部から下側に突出する結合部323を備える。ハンド回転軸322および結合部323は、中心軸J1を中心とする略円柱状である。
【0019】
ハンド回転軸322は、固定部31の貫通穴310に挿入され、ロボットアーム11の先端部に設けられた回転軸111(ロボットアーム11が有する回転軸であり、以下、「アーム回転軸111」という。)に接続される。ハンド回転軸322がアーム回転軸111に接続された状態では、アーム回転軸111の中心軸は、ハンド回転軸322の中心軸J1に一致するため、以下、アーム回転軸111の中心軸にも符号J1を付す。組立ロボット1では、回転部32の回転部本体321が固定部31の下側に隣接しており、アーム回転軸111が回転することにより、回転部32が、アーム回転軸111およびハンド回転軸322の中心軸(すなわち、中心軸J1)を中心としてアーム回転軸111と共に回転する。
【0020】
結合部323は、ハンド先端部4(図4参照)が回転部32に対して取り付けられる際に、ハンド先端部4の結合穴42(図4参照)に挿入されて結合穴42に結合する。また、結合部323と結合穴42との結合が解除されることにより、ハンド先端部4が回転部32から取り外される。ロボットハンド2では、結合部323は、ハンド先端部4を着脱自在に固定する着脱機構である。
【0021】
ロボットハンド2は、固定部31と回転部32との間に配置されて電気信号を伝達するスリップリング35をさらに備える。スリップリング35は、いわゆるディスク式スリップリングであり、ハンド回転軸322に固定される円環板状のディスク基板351、および、固定部31に固定される複数の接触子352を備える。接触子352は、固定部31およびロボットアーム11の内部に配置された配線を介して制御部12(図1参照)に接続される。
【0022】
ディスク基板351はハンド回転軸322の中心軸J1に垂直に配置され、ディスク基板351の上面には、ハンド回転軸322を中心とする同心円状に配置された複数のリングが設けられる。当該複数のリングは電気的に互いに絶縁されており、複数のリングのそれぞれに接触子352が接触することにより、固定部31から回転部32への電力の供給、および、固定部31と回転部32との間における信号の授受が行われる。ロボットハンド2では、スリップリング35における複数の電気的接点が、ハンド回転軸322の中心軸J1に垂直な面内に位置する。
【0023】
回転部本体321の上面には、略円環板状の通信用基板353が設けられ、回転部本体321の内部に配置された配線を介してスリップリング35のディスク基板351に接続される。通信用基板353は、また、回転部本体321の下面に設けられた第1接続用基板38に、回転部本体321の内部に配置された配線を介して接続される。
【0024】
図3に示すように、回転部本体321の外側面には、中心軸J1を中心として環状に配置される複数の電磁弁33,33aが設けられる。本実施の形態では、8つの電磁弁33が中心軸J1を中心としておよそ等間隔にて配置され、1つの電磁弁33aが電磁弁33の間に設けられる。電磁弁33,33aは、回転部本体321の内部に配置された配線(図示省略)を介して、図2に示す通信用基板353に接続される。図2では、2つの電磁弁33のみが描かれている。
【0025】
図2および図3に示すように、回転部本体321の内部には、中心軸J1を中心とする略円環状の内部流路341が形成されており、複数の電磁弁33,33aはそれぞれ、回転部本体321の内部にて中心軸J1へと向かう内部流路342,342aを介して内部流路341に接続される。内部流路341は、回転部本体321およびハンド回転軸322の内部に形成された内部流路340に接続され、内部流路340はロボットアーム11のアーム回転軸111の内部へと連続してエア供給源に接続される。なお、内部流路340は、ハンド回転軸322の外側面に形成された円周状の流路を介して、固定部31の内部に形成された内部流路へと連続してもよい。固定部31の内部流路は、ロボットアーム11の内部に形成された内部流路を介してエア供給源に接続されてもよく、固定部31の外側面へとチューブにて連結されるエア供給源に接続されてもよい。
【0026】
図3に示すように、上述の結合部323は、内部流路344a,344bを介して電磁弁33aに接続される。電磁弁33aを駆動するための信号は、制御部12(図1参照)からロボットアーム11および固定部31のそれぞれの内部に配置された内部配線を介してスリップリング35へと送られ、スリップリング35を介して固定部31から回転部32の電磁弁33aへと送られる。そして、当該信号に基づいて電磁弁33aの制御が行われる。組立ロボット1では、電磁弁33aから内部流路344aを介して結合部323に圧縮エアが供給されることにより、複数の結合用ボールが結合部323の外周面から突出し、結合穴42(図4参照)の内側面に形成された溝部に嵌合する。これにより、ハンド先端部4と回転部32とが結合される。また、電磁弁33aから内部流路344bを介して結合部323に圧縮エアが供給されることにより、複数の結合用ボールが結合部323の内部に収容される。これにより、ハンド先端部4と回転部32との結合が解除される。
【0027】
このように、組立ロボット1では、制御部12から固定部31へと出力された結合部323によるハンド先端部4の固定および分離を切り換える信号(以下、「結合部制御信号」という。)が、固定部31からスリップリング35を介して結合部323へと伝達される。結合部323は、回転部32の内部に形成された内部流路340,341,342a,344a,344b(以下、「着脱用流路」という。)内の流体を介して駆動される。
【0028】
図4および図5はそれぞれ、ハンド先端部4の側面図および底面図である。ハンド先端部4がハンド本体部3に装着された状態では、ハンド先端部4の中心軸と、ハンド本体部3の中心軸J1とが一致するため、以下の説明では、ハンド先端部4の中心軸にも符号J1を付す。ハンド先端部4は、中心軸J1を中心とする略円柱状の先端部本体41を有し、先端部本体41の下部には複数の把持部5が接続される。また、図4に示すように、先端部本体41の上面(図中の上側の面)の中央部には、中心軸J1を中心とする上述の結合穴42が形成されており、上面の外縁近傍には、回転部本体321の第1接続用基板38(図3参照)に接続される第2接続用基板43が設けられる。
【0029】
本実施の形態では、図5に示すように、4つのベースブロック50が先端部本体41に接続され、各ベースブロック50に2つの把持部5が設けられる。各ベースブロック50の2つの把持部5は、図4に示す先端部本体41の内部に形成された内部流路411、および、回転部本体321の内部に形成された内部流路343(図3参照)を介して、対応する1つの電磁弁33に接続される。すなわち、4つの電磁弁33が4つのベースブロック50に接続され、他の4つの電磁弁33は使用されない。
【0030】
組立ロボット1では、電磁弁33を駆動するための信号が、制御部12(図1参照)からロボットアーム11および固定部31のそれぞれの内部に配置された内部配線を介してスリップリング35へと送られ、スリップリング35を介して固定部31から回転部32の複数の電磁弁33へと送られる。そして、当該信号に基づいて電磁弁33の制御が行われ、回転部32の内部に形成された内部流路340,341,342,343、および、ハンド先端部4の内部に形成された内部流路411を介して圧縮エアが供給されることにより、ベースブロック50上の2つの把持部5が同時に駆動される。換言すれば、制御部12から固定部31へと出力された把持部5を制御する信号(以下、「把持部制御信号」という。)が、固定部31からスリップリング35を介して把持部5へと伝達される。把持部5は、内部流路340,341,342,343,411(以下、「把持用流路」という。)内の流体を介して駆動される。なお、1つのベースブロック50上の2つの把持部5を個別に駆動する場合には、一方の把持部5が、他の電磁弁33に接続される他の内部流路にチューブ等により接続される。
【0031】
図6および図7はそれぞれ、1つの把持部5近傍を拡大して示す正面図および側面図である。図6および図7では、図の理解を容易にするために、先端を下側に向けて把持部5を描いている。把持部5は、把持部本体51、および、把持部本体51の下側に配置される2つの爪部52を備える。把持部5によりワークが把持される際には、電磁弁33(図2および図3参照)による制御により、2つの爪部52が図6中の左右方向において互いに近づくように移動し、2つの爪部52の間にワーク91が挟持される。図6中では、ワーク91、および、ワーク91を把持した状態の爪部52を二点鎖線にて示す。ワークの把持が解除される際には、電磁弁33による制御により、2つの爪部52が図6中の左右方向において互いに離間するように移動し、2つの爪部52がワークから離間する。
【0032】
図6および図7に示すように、各把持部5の把持部本体51には、把持部5によるワークの把持状態を取得する把持状態取得部6が取り付けられる。把持状態取得部6は、2つの爪部52にそれぞれ接続されて爪部52と共に移動する2つの遮光部61、2つの遮光部61を挟むように配置されるフォトカプラ62、および、フォトカプラ62に電力を供給するとともにフォトカプラ62からの信号を受信する状態取得用基板63を備える。
【0033】
各把持部5に対応する状態取得用基板63は、先端部本体41の内部に配置された配線を介して第2接続用基板43(図4参照)に接続されており、制御部12(図1参照)からの電力は、スリップリング35、通信用基板353、第1接続用基板38(図2参照)および第2接続用基板43を介して複数の状態取得用基板63に供給される。また、状態取得用基板63から出力された信号(ワークの把持状態を示す信号であり、以下、「把持状態信号」という。)は、ハンド先端部4の内部に配置される配線を介して第2接続用基板43へと送られ、第2接続用基板43および第1接続用基板38を介してハンド本体部3の回転部32へと送られる。そして、回転部32の内部に配置される配線、および、通信用基板353を介してスリップリング35へと導かれ、スリップリング35を介して回転部32から固定部31へと伝達される。さらに、固定部31およびロボットアーム11内の配線を介して制御部12へと送られる。
【0034】
図8.Aないし図8.Cは、把持状態取得部6による把持状態信号の取得を説明するための図であり、把持部5近傍を爪部52の先端側から見た図である。図8.Aないし図8.Cでは、図の理解を容易にするために、遮光部61はその上端のみを実線にて示し、他の部位を破線にて示す。図8.Aに示すように、2つの爪部52が左右方向に最も離れている状態では、フォトカプラ62のLED621から受光素子622へと至る光路上に一方の遮光部61が位置するため、フォトカプラ62はOFFとなる。そして、ワークを把持していない状態を示す把持状態信号(以下、「非把持信号」という。)が、状態取得用基板63から制御部12(図1参照)へと送られる。図8.Aでは、フォトカプラ62のLED621から受光素子622へと至る光軸を一点鎖線にて示し、符号J2を付す(図8.Bおよび図8.Cにおいても同様)。
【0035】
把持部5において2つの爪部52が互いに近づくように移動し、図8.Bに示すように、2つの爪部52によりワーク91が狭持される状態となると、2つの遮光部61が光軸J2から僅かにずれた位置にて重なるため、フォトカプラ62はONとなり、ワーク91を把持している状態を示す把持状態信号(以下、「把持信号」という。)が、状態取得用基板63から制御部12へと送られる。把持状態取得部6では、2つの爪部52が図8.Aに示す位置から図8.Bに示す位置へと移動する間、把持状態取得部6から制御部12へと非把持信号が連続的に送られ、2つの爪部52によりワーク91が狭持されている状態では、把持信号が連続的に送られる。そして、2つの爪部52が互いに離れるように移動してワーク91の把持が解除されると、再び非把持信号が連続的に送られる。制御部12では、把持部5がワーク91の非把持状態から把持状態へと移行し、所定の時間だけ把持状態であった後に、再度、非把持状態へと移行したと理解され、ワーク91の把持および解放が正常に行われたと判断される。
【0036】
一方、把持部5によりワークを把持し損ねた場合、2つの爪部52は図8.Aに示す位置から図8.Bに示す位置を経由して図8.Cに示す位置へと移動する。図8.Cに示すように、2つの爪部52の間の左右方向の距離がワーク91(図8.B参照)の幅よりも小さい状態では、光軸J2上に他方の遮光部61(すなわち、図8.Aにおいて光軸J2上に位置するものとは異なる遮光部61)が位置するため、フォトカプラ62はOFFとなる。爪部52が図8.Aに示す位置から図8.Cに示す位置へと移動する間、状態取得用基板63から制御部12へは非把持信号が連続的に送られる。正確には、爪部52が図8.Bに示す位置を通過する極短い時間のみは、状態取得用基板63から制御部12へと把持信号が送られるが、当該把持信号は持続時間が所定の閾値よりも短いため無視される。制御部12では、ワーク91の把持は正常に行われなかったと判断される。
【0037】
以上に説明したように、組立ロボット1では、制御部12から固定部31へと出力された把持部制御信号および結合部制御信号が、スリップリング35を介して固定部31から回転部32へと伝達され、また、把持状態取得部6から出力された把持状態信号が、回転部32からスリップリング35を介して固定部31へと伝達されて制御部12へと送られる。このため、ロボットハンド2のハンド本体部3において、固定部31と回転部32との間における信号伝達用の配線が外部に露出することを抑制(または防止)することができ、配線によりロボットハンド2やロボットアーム11の可動範囲が制限されてしまうことを抑制(または防止)することができる。また、固定部31および回転部32間における配線の断線を防止して組立ロボット1の生産性低下を防止することができる。
【0038】
さらに、ロボットハンド2では、把持部5および把持状態取得部6を備えるハンド先端部4が、回転部32に対して着脱自在に固定されるため、把持部5の種類を変更する際等に、ハンド先端部4を他のハンド先端部4に交換することにより把持部5を容易に交換することができる。また、スリップリング35や電磁弁33等が設けられたハンド本体部3を交換する必要が無いため、ロボットハンド2の製造コストを低減することもできる。
【0039】
ロボットハンド2では、スリップリング35における複数の電気的接点が、ハンド回転軸322の中心軸J1に垂直な面内に位置することにより、スリップリング35の中心軸J1方向の長さを短くしてロボットハンド2を小型化することができる。
【0040】
把持部5は、回転部32およびハンド先端部4の内部に形成された把持用流路内の流体である圧縮エアを介して駆動される。このように、把持部5を駆動するための流体の配管がロボットハンド2の外部に露出することを防止することにより、配管によるロボットハンド2やロボットアーム11の可動範囲の制限を緩和することができる。また、ロボットハンド2および組立ロボット1の大型化を抑制することもできる。さらに、結合部323は、回転部32の内部に形成された着脱用流路内の流体である圧縮エアを介して駆動される。このように、結合部323を駆動するための流体の配管がロボットハンド2の外部に露出することを防止することにより、配管によるロボットハンド2やロボットアーム11の可動範囲の制限をより一層緩和することができる。また、ロボットハンド2および組立ロボット1の大型化をさらに抑制することもできる。
【0041】
ロボットハンド2では、把持状態取得部6から出力された把持状態信号をスリップリング35へと導く配線が、ハンド先端部4および回転部32の内部に配置される。このため、配線によりロボットハンド2やロボットアーム11の可動範囲が制限されてしまうことを抑制(または防止)することができるとともに、配線の断線を防止して組立ロボット1の生産性低下を防止することができる。また、配線等がロボットハンド2の外部に露出することを抑制し、ロボットハンド2および組立ロボット1の大型化を抑制することもできる。
【0042】
以上、本発明の実施の形態について説明してきたが、本発明は上記実施の形態に限定されるものではなく、様々な変更が可能である。
【0043】
例えば、ロボットハンド2の中心軸J1方向における長さが許容範囲内となるのであれば、スリップリング35は、中心軸J1を中心とする円筒面状のドラム基板、および、ドラム基板に接触する接触子を備えるドラム式スリップリングであってもよい。また、把持部5や結合部323を駆動するための流体として、圧縮エア以外のガスや駆動油等の流体が利用されてもよい。
【0044】
把持部5は、2つの爪部52によりワークを把持する構造には限定されず、4つの爪部によりワークを把持するものや、ワークを吸着するものであってもよい。ハンド先端部4には、把持部5が1つのみ設けられてもよい。把持状態取得部6では、遮光部61およびフォトカプラ62に代えて、マグネット式センサや真空スイッチ等が、把持部5によるワークの把持状態の検出に利用されてもよい。組立ロボット1では、ハンド本体部3の固定部31にアーム回転軸111が挿入されてもよい。また、ロボットハンド2がロボットアーム11と一体物として製造されてもよく、この場合、固定部31はロボットアーム11の一部と捉えられてもよい。
【0045】
上記実施の形態および各変形例における構成は、相互に矛盾しない限り適宜組み合わせられてよい。
【符号の説明】
【0046】
2 ロボットハンド
4 ハンド先端部
5 把持部
6 把持状態取得部
12 制御部
31 固定部
32 回転部
35 スリップリング
91 ワーク
322 ハンド回転軸
323 結合部
340〜343,342a,344a,344b,411 内部流路
【特許請求の範囲】
【請求項1】
組立ロボットのロボットアームの先端に設けられるロボットハンドであって、
回転軸が挿入される固定部と、
前記固定部に隣接し、前記回転軸を中心として回転する回転部と、
前記回転部に着脱自在に取り付けられる先端部と、
前記固定部と前記回転部との間に配置されて電気信号を伝達するスリップリングと、
を備え、
前記先端部が、
ワークを把持する把持部と、
前記把持部によるワークの把持状態を取得する把持状態取得部と、
を備え、
前記回転部が、前記先端部を着脱自在に固定する着脱機構を備え、
制御部から前記固定部へと出力された前記把持部を制御する信号、および、前記着脱機構による前記先端部の固定および分離を切り替える信号がそれぞれ、前記固定部から前記スリップリングを介して前記把持部および前記着脱機構へと伝達され、
前記把持状態取得部から出力された信号が、前記回転部から前記スリップリングを介して前記固定部へと伝達されて前記制御部へと送られることを特徴とするロボットハンド。
【請求項2】
請求項1に記載のロボットハンドであって、
前記スリップリングにおける電気的接点が、前記回転軸に垂直な面内に位置することを特徴とするロボットハンド。
【請求項3】
請求項1または2に記載のロボットハンドであって、
前記把持部が、前記回転部および前記先端部の内部に形成された把持用流路内の流体を介して駆動されることを特徴とするロボットハンド。
【請求項4】
請求項1ないし3のいずれかに記載のロボットハンドであって、
前記着脱機構が、前記回転部の内部に形成された着脱用流路内の流体を介して駆動されることを特徴とするロボットハンド。
【請求項5】
請求項1ないし4のいずれかに記載のロボットハンドであって、
前記把持状態取得部から出力された信号を前記スリップリングへと導く配線が、前記先端部および前記回転部の内部に配置されることを特徴とするロボットハンド。
【請求項1】
組立ロボットのロボットアームの先端に設けられるロボットハンドであって、
回転軸が挿入される固定部と、
前記固定部に隣接し、前記回転軸を中心として回転する回転部と、
前記回転部に着脱自在に取り付けられる先端部と、
前記固定部と前記回転部との間に配置されて電気信号を伝達するスリップリングと、
を備え、
前記先端部が、
ワークを把持する把持部と、
前記把持部によるワークの把持状態を取得する把持状態取得部と、
を備え、
前記回転部が、前記先端部を着脱自在に固定する着脱機構を備え、
制御部から前記固定部へと出力された前記把持部を制御する信号、および、前記着脱機構による前記先端部の固定および分離を切り替える信号がそれぞれ、前記固定部から前記スリップリングを介して前記把持部および前記着脱機構へと伝達され、
前記把持状態取得部から出力された信号が、前記回転部から前記スリップリングを介して前記固定部へと伝達されて前記制御部へと送られることを特徴とするロボットハンド。
【請求項2】
請求項1に記載のロボットハンドであって、
前記スリップリングにおける電気的接点が、前記回転軸に垂直な面内に位置することを特徴とするロボットハンド。
【請求項3】
請求項1または2に記載のロボットハンドであって、
前記把持部が、前記回転部および前記先端部の内部に形成された把持用流路内の流体を介して駆動されることを特徴とするロボットハンド。
【請求項4】
請求項1ないし3のいずれかに記載のロボットハンドであって、
前記着脱機構が、前記回転部の内部に形成された着脱用流路内の流体を介して駆動されることを特徴とするロボットハンド。
【請求項5】
請求項1ないし4のいずれかに記載のロボットハンドであって、
前記把持状態取得部から出力された信号を前記スリップリングへと導く配線が、前記先端部および前記回転部の内部に配置されることを特徴とするロボットハンド。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8.A】
【図8.B】
【図8.C】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8.A】
【図8.B】
【図8.C】
【公開番号】特開2012−101316(P2012−101316A)
【公開日】平成24年5月31日(2012.5.31)
【国際特許分類】
【出願番号】特願2010−251746(P2010−251746)
【出願日】平成22年11月10日(2010.11.10)
【出願人】(000000309)IDEC株式会社 (188)
【Fターム(参考)】
【公開日】平成24年5月31日(2012.5.31)
【国際特許分類】
【出願日】平成22年11月10日(2010.11.10)
【出願人】(000000309)IDEC株式会社 (188)
【Fターム(参考)】
[ Back to top ]