
ロボット制御方法、ロボット制御プログラムおよびロボット制御方法に用いられるティーチングペンダント
【課題】作業者がティーチングペンダントなどを操作して実際のロボットハンドの位置や向きの変更を繰り返すティーチング作業を行うことなく、自動的にティーチングを行うことが可能なロボット制御システムの教示方法およびその教示方法によって教示を行うロボット制御システムを提供する。
【解決手段】
教示方法の一実施形態は、トレイ20のマーカー23が含まれるように可搬型カメラ8で撮像する第1撮像工程と、その画像からマーカー23を検出して、トレイ20毎に予め登録されているデータとの照合などの判断を行う第1画像処理工程と、該当するマーカー23に応じた初期位置へロボットハンド31を移動させる初期移動工程と、ロボットハンド31の小型カメラ34によってマーカー23の少なくとも1つが含まれるように撮像する第2撮像工程と、その画像からマーカー23の位置誤差を検出する第2画像処理工程とを含む。
【解決手段】
教示方法の一実施形態は、トレイ20のマーカー23が含まれるように可搬型カメラ8で撮像する第1撮像工程と、その画像からマーカー23を検出して、トレイ20毎に予め登録されているデータとの照合などの判断を行う第1画像処理工程と、該当するマーカー23に応じた初期位置へロボットハンド31を移動させる初期移動工程と、ロボットハンド31の小型カメラ34によってマーカー23の少なくとも1つが含まれるように撮像する第2撮像工程と、その画像からマーカー23の位置誤差を検出する第2画像処理工程とを含む。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ロボット制御方法、ロボット制御プログラムおよびロボット制御方法に用いられるティーチングペンダントに関し、特に、作業者がティーチングペンダントなどを操作して実際のロボットハンドの位置の変更を繰り返すようなティーチング作業を行う必要がないロボット制御方法、ロボット制御プログラムおよびロボット制御方法に用いられるティーチングペンダントに関する。
【背景技術】
【0002】
産業用ロボットは、一般に、旋回可能かつ上下動可能なロボットアームと、ロボットアームの先端に設けられ、ワーク(部品)を把持するためのチャック部を有するロボットハンドと、ロボットアームおよびロボットハンドを所定の制御プログラムにしたがって駆動制御する制御部とを備えている。また、自動組立装置は、ワークテーブル面上のそれぞれ所定位置に配置された、多数の部品を収容する複数の部品供給トレイと、部品の組立てを行うための組立用治具とを有している。
【0003】
自動組立装置の運転時には、ロボットアームを駆動して、ロボットハンドを所定の部品供給トレイの位置まで移動させ、先端のチャック部で部品を把持する。この状態から、ロボットアームを駆動して、ロボットハンドを組立用治具の位置まで移動させ、チャック部に把持されていた部品を組立用治具に組み付ける。以下、同様の動作を繰り返すことにより、所望の機器が自動的に組み立てられることになる。
【0004】
このような産業用ロボットを含む自動組立装置においては、自動運転を開始する前に、ロボットに対して動作基準座標や動作手順等を教示するティーチングという作業が必要になる。従来のティーチング作業では、パソコン上のコンピュータシミュレーションなどにより、概略の座標位置を求めた後、作業者が、ティーチングペンダントやティーチングボックスを用いて実際にロボットハンドをマニュアル操作することにより、正確な座標位置の設定を行うようにしている(例えば、特許文献1および特許文献2参照)。
【0005】
上述したティーチング作業では、細かな座標位置の設定が非常に煩雑であって所要時間も長くなるという問題点があったため、ティーチング作業の簡略化およびティーチング時間の短縮を可能とする技術も提案されている(例えば、特許文献3参照)。
【0006】
この特許文献3で提案されているロボット制御システムは、ロボットアームと、ロボットアームの先端に設けられ、ワーク把持用チャック部を有するロボットハンドとを含むロボットと、前記ロボットに対してティーチング入力を行うための操作部と、少なくともワークを撮影できるカメラ部と、前記操作部にティーチング入力された所定の座標位置を前記カメラ部で撮影された画像に基づいて補正して、補正された座標位置に移動するように前記ロボットを駆動制御する制御部と、を備えることを特徴とするものである。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2000−354919号公報
【特許文献2】特開2006−043844号公報
【特許文献3】特開2009−000782号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかしながら、上述のような従来技術においてティーチングペンダントなどによるティーチング作業を行う際、少なくとも初回はロボットハンドの位置を複雑に変更させることを繰り返す必要がある。そのため、ティーチング作業はやはり非常に煩雑であって所要時間も長かった。
【0009】
最近では、ロボット導入台数の増加および製品の多種多様化に伴い、必要とされるティーチング工数が急増している。一方で、製造現場では慢性的に人員が不足しており、特にティーチング作業の熟練者が極めて不足している。また、製造現場で実際に使用されているロボットにティーチングを行うときには、そのロボットが設置されている製造ラインなどが停止することになるので、その製造ラインの稼働率が低下してしまう。
【0010】
従来技術のこのような課題に鑑み、本発明の第1の目的は、作業者がティーチングペンダントなどを操作して実際のロボットハンドの位置の変更を繰り返すティーチング作業を行うことなく、自動的にティーチングを行うことが可能なロボット制御方法およびロボット制御プログラムを提供することである。
【0011】
また、本発明の第2の目的は、作業者がティーチングペンダントなどを操作して実際のロボットハンドの位置の変更を繰り返すティーチング作業を行うことなく、ティーチングペンダントなどに表示される画像上をタッチペンで操作するなどの極めて簡単な操作のみでロボットハンドの移動経路を容易にティーチングできるロボット制御方法、ロボット制御プログラムおよびロボット制御方法に用いられるティーチングペンダントを提供することである。
【課題を解決するための手段】
【0012】
上記の第1の目的を達成するため、本発明のロボット制御方法は、作業対象物が搭載される領域を撮像する撮像工程と、前記撮像工程で撮像された画像データから目印に対応する初期位置を得る第1画像処理工程と、前記撮像工程で撮像された画像データから前記目印の位置を得る第2画像処理工程と、前記初期位置へロボットハンドを移動させる第1移動工程と、前記初期位置から前記目印の位置に基づいて前記作業対象物へ前記ロボットハンドを接近させる第2移動工程と、を備えたことを特徴とする。
【0013】
このような構成のロボット制御システムの教示方法によれば、作業者がティーチングペンダントなどを操作して実際のロボットハンドの位置の変更を繰り返すティーチング作業を行うことなく、ティーチングの負荷が軽減する。
【0014】
また、本発明のロボット制御方法において、前記撮像工程は、前記第1画像処理工程用の画像データを撮像する第1撮像工程と、前記第2画像処理工程用の画像データを撮像する第2撮像工程と、を含み、前記第2撮像工程は、前記初期位置から前記領域を撮像することが好ましい。
【0015】
このような構成のロボット制御方法によれば、初期位置から前記領域を撮像するので、ロボットハンドから眺めた目印の正確な位置を把握することができ、また、目印が隠されることがなく、作業対象物へのアクセスの正確性が増す。
【0016】
また、本発明のロボット制御方法において、前記第2撮像工程における撮像は、前記ロボットハンドに設けられたカメラによって行われることが好ましい。
【0017】
このような構成のロボット制御方法によれば、ロボットハンドがカメラを初期位置に位置させるので、カメラを作業者が初期位置に予め設置する必要がない。
【0018】
あるいは、上記の第2の目的を達成するため、本発明のロボット制御方法は、ロボットハンドが動作する領域を撮像する撮像工程と、前記撮像工程で撮像された画像上で作業者によって指示された第1の位置を付加する第1画像処理工程と、前記第1画像処理工程の後、前記撮像工程で撮像された前記画像上で前記作業者によって指示された第2の位置を付加する第2画像処理工程と、前記第1の位置へロボットハンドを移動させる第1移動工程と、前記第1の位置から前記第2の位置へ前記ロボットハンドを移動させる第2移動工程と、を備えたことを特徴とする。
【0019】
このような構成のロボット制御方法によれば、作業者がティーチングペンダントなどを操作して実際のロボットハンドの位置の変更を繰り返すティーチング作業を行うことなく、作業者が画像上に第1の位置及び第2の位置を順に指示する極めて簡単な操作のみでロボットハンドの第1の位置から第2の位置までの移動経路を容易にティーチングすることが可能となり、ティーチングの負荷が軽減する。
【0020】
また、このようなロボット制御方法をコンピュータに実行させるためのロボット制御プログラムも本発明の範疇である。
【0021】
また、本発明のロボット制御方法は、前記第1及び第2画像処理工程は前記画像データをティーチングペンダントの表示部に表示する工程と、前記表示部に表示された前記画像上で作業者によって触れられた箇所を前記第1及び第2の位置として指示する工程と、を含むことを特徴とする。
【0022】
このような構成のロボット制御方法によれば、作業者がティーチングペンダントの表示部の画像上を触れる極めて簡単な操作のみでロボットハンドの第1の位置から第2の位置までの移動経路を容易にティーチングすることが可能となる。
【0023】
また、本発明のロボット制御方法は、前記第1及び第2画像処理工程は、前記前記表示部上の指示された箇所に所定の表示を行う工程を含む。
【0024】
このような構成のロボット制御方法によれば、作業者がロボットの移動経路を画像上で確認できる。
【発明の効果】
【0025】
本発明のロボット制御方法によれば、作業者がティーチングペンダントなどを操作して実際のロボットハンドの位置の変更を繰り返すティーチング作業を行うことなく、ティーチングの負荷が軽減する。
【図面の簡単な説明】
【0026】
【図1】本発明の第1実施形態に係るロボット制御システム1の平面概略図である。
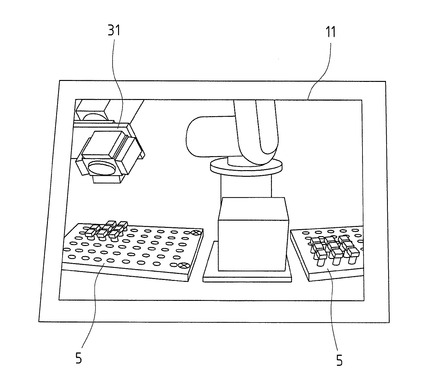
【図2】ロボット制御システム1で制御されるロボット3の側面斜視図である。
【図3】ロボット3が有するロボットアーム30の先端に設けられるロボットハンド31の拡大斜視図である。
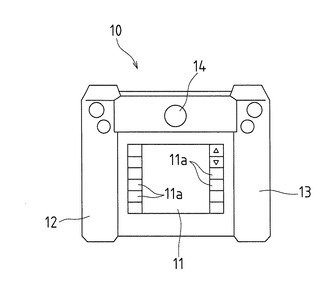
【図4】ロボット制御システム1のティーチングに使用されるティーチングペンダント10の正面拡大図である。
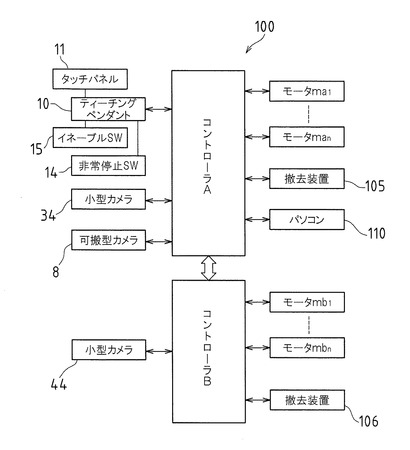
【図5】ロボット制御システム1の制御部100のブロック構成図である。
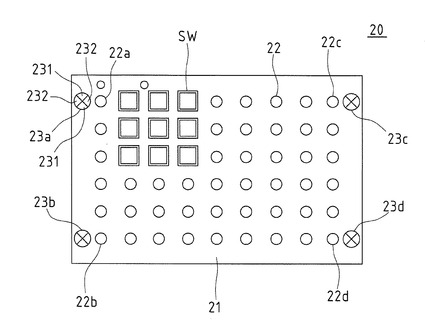
【図6】第1実施形態で使用されるトレイ20の一例の概略を示す平面図である。
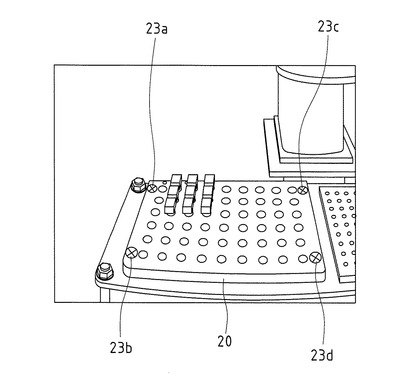
【図7】可搬型カメラ8によって撮像され、トレイ20のマーカー23がすべて写っている画像がパソコン110の画面に表示された一例を示す図である。
【図8】ロボットハンド31の小型カメラ34によって撮像され、トレイ20のマーカー23の1つが写っている画像がパソコン110の画面に表示された一例を示す図である。
【図9】本発明の第2実施形態において、可搬型カメラ8によって撮像された画像がティーチングペンダント10のディスプレイ11に表示された一例を示す図である。
【発明を実施するための形態】
【0027】
以下、本発明の実施形態を、図面を参照して説明する。
【0028】
<<<第1実施形態>>>
<ロボット制御システム1の構成>
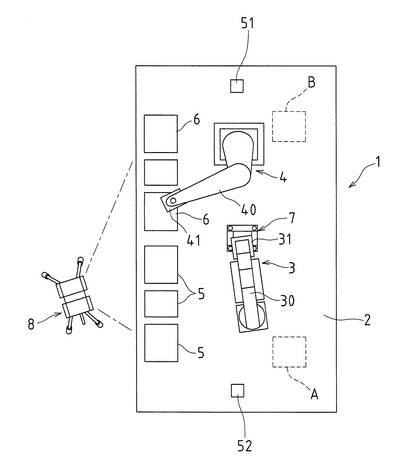
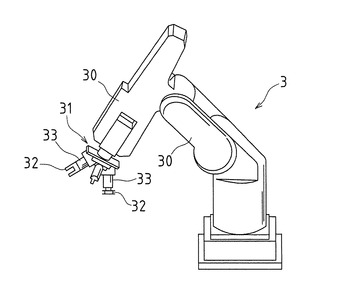
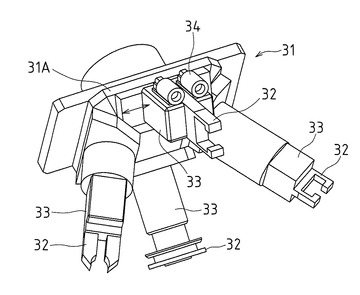
図1は本発明の第1実施形態に係るロボット制御システム1の平面概略図である。図2はこのロボット制御システム1で制御されるロボット3の側面斜視図である。図3はこのロボット3が有するロボットアーム30の先端に設けられるロボットハンド31の拡大斜視図である。図4はロボット制御システム1のティーチングに使用されるティーチングペンダント10の正面拡大図である。
【0029】
図1に示すように、ロボット制御システム1は、ワークテーブル2上に離隔配置された2つの組立用ロボット3、4を備えている。ロボット3、4はいずれも多関節ロボットであって、複数のロボットアーム30、40をそれぞれ有している。先端側のロボットアーム30、40の先端には、ロボットハンド31、41がそれぞれ設けられている。
【0030】
ワークテーブル2上の一側部には、それぞれ多数の部品(ワーク)(図示せず)を収容する複数の部品供給トレイ5、6が整列して配置されている。これらの部品供給トレイ5、6は、図示しない搬入装置によって、ワークテーブル2上に搬入されるようになっている。ワークテーブル2上において、略中央位置には、各ロボット3、4により部品の組立作業が行われる組立用治具7が取り付けられている。ワークテーブル2の下方には、それぞれロボット3、4を駆動制御するためのコントローラA、Bが設けられている。また、ワークテーブル2の一側方には、ロボットアーム30、40の可動範囲全体を撮影するための可搬型カメラ8が配置されている。可搬型カメラ8は、部品供給トレイ5、6周辺や組立用治具7周辺を撮像するためにレンズを振るパン機能及びレンズが向けられた方向を拡大して撮像するためのズーム機能を有するものが好ましい。
【0031】
ロボット3は、図2に示すように、先端側のロボットアーム30の先端に着脱自在なロボットハンド31を有している。ロボットハンド31には、複数のワーク把持用チャック部32が設けられている。
【0032】
チャック部32は、図3に示すように、支持台33に支持されている。支持台33には、チャック部32を駆動する駆動機構が内蔵されている。ロボットハンド31は、ベース板31Aを有している。図示された4つの支持台33のうちの一つが、ベース板31A上において図示矢印方向に移動可能に設けられており、この移動可能な支持台33の側面には、チャック部32の先端を撮影するための例えばビジョンカメラまたはCCD等の小型カメラ34が取り付けられている。
【0033】
なお、ロボット4のロボットハンド41についても同様の構成を有しているため、ここでは、説明を省略する。
【0034】
また、このロボット制御システム1は、図4に示すようなティーチングペンダント(操作部、可搬型の教示装置)10を有している。ティーチングペンダント10は、カメラ8又はロボットハンド31のカメラ34で撮影された画像を表示するためのLCD(液晶)ディスプレイ11と、操作者が握るための左右のグリップ12、13と、非常停止スイッチ14とを備えている。
【0035】
ディスプレイ11は、タッチパネル式のディスプレイである。また、ディスプレイ11の左右両側には、起動、停止、ティーチングなどのロボット操作用の押しボタンスイッチ11aが複数個設けられている。グリップ12の裏面には、ティーチング時や試運転時などの非定常作業時に操作者が危険を回避するための3ポジション方式のイネーブルスイッチ15(図5参照)が設けられている。
【0036】
次に、ロボット制御システム1の制御部について図5を用いて説明する。図5はロボット制御システム1の制御部100のブロック構成図である。
【0037】
制御部100は記憶部とコンピュータを含んでいる。記憶部は以下に説明するロボット制御方法を実行するためのコンピュータプログラムが記憶され、コンピュータは当該プログラムを実行する。 詳細には制御部100は例えば図5に示すようにロボット3のコントローラAと、ロボット4のコントローラBとパソコン110を含んで構成されている。コントローラA、Bは互いに通信可能に構成されている。
【0038】
コントローラAの入力側には、ティーチングペンダント10がワイヤレスで接続されている。ティーチングペンダント10には、上述したように、タッチパネル式のディスプレイ11、非常停止スイッチ14およびイネーブルスイッチ15が接続されている。また、コントローラAの入力側には、小型カメラ34および可搬型カメラ8が接続されている。
【0039】
コントローラAの出力側には、ロボットアーム30およびロボットハンド31を駆動するためのモータma1〜manが接続されている。また、コントローラAの出力側には、自動運転中の「チョコ停」の発生時に仕掛品をワークテーブル2上から撤去するための撤去装置105が接続されている。この撤去装置105は、ロボットハンド31に設けられており、好ましくは、ロボットハンド31におけるいずれかのチャック部32が撤去装置105として機能している。なお、ワークテーブル2上に向けて圧搾空気を噴出させるためのエアーノズルを撤去装置105に設けるようにしてもよいし、このエアーノズルをロボットハンド31に設けるようにしてもよい。
【0040】
コントローラAの出力側には、さらにパソコン110が接続されている。パソコン110は、ティーチング時のシミュレーションを行うだけでなく、可搬型カメラ8で撮影した自動運転中の映像をモニターするのに用いられている。パソコン110は、コントローラAに無線LANで接続されている。なお、自動運転中の映像は、ティーチングペンダント10に表示するようにしてもよい。
【0041】
一方、コントローラBの入力側には、同様にロボット4において、ロボットハンド41のチャック部の支持台に設けられた小型カメラ44が接続されている。また、コントローラBの出力側には、ロボットアーム40およびロボットハンド41を駆動するためのモータmb1〜mbnと、撤去装置105と同様の撤去装置106とが接続されている。
【0042】
<部品搭載用のトレイ20およびその種類などを識別するためのマーカー23>
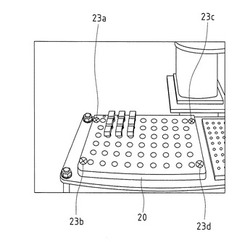
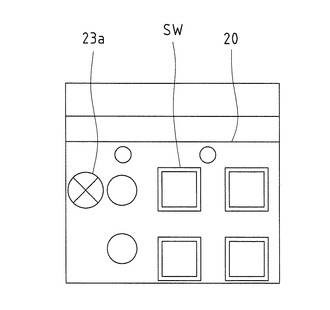
図6は第1実施形態で使用される部品供給トレイ5、6であるトレイ20の一例の概略を示す平面図である。このトレイ20は、複数の部品を同時に整列配置可能な構造を有しており、その部品搭載面21の周辺部などにトレイの種類および位置を識別可能にするために複数の目印であるマーカー23(23a〜23d)が印されている。これらのマーカー23は、部品搭載面21において、部品を搭載しても隠されることがないような位置、例えば、部品搭載面21の周辺部などに印すことが好ましい。
【0043】
なお、以下の説明では、マーカー23a〜23dのそれぞれの特定が必要でない場合は、マーカー23として総称する。また、ロボット3についてのティーチングの例を説明するが、ロボット4でも同様のティーチングが可能である。
【0044】
これらのマーカー23はそれぞれ、円形であり、中心角が45度の白で塗られた扇形232及び黒で塗られた扇形231に塗り分けられていることが望ましい。このように黒及び白でマーカの模様を構成することで、画像処理によってマーカ23a〜23dの中心の位置を正確かつ容易に検出することができる。
【0045】
図6に示すように、このトレイ20は具体的には押しボタンスイッチの自動組立作業などに使用される横長矩形平板状のトレイであって、部品搭載面21の6行×9列の格子位置に、各押しボタンスイッチSWの下側の軸を挿入することによって複数の押しボタンスイッチSWを整列配置可能な丸孔22がそれぞれ設けられている。
【0046】
これらの丸孔22のうちで左上の丸孔22aのすぐ左側にはマーカー23aが、左下の丸孔22bのすぐ左側にはマーカー23bが、右上の丸孔22cのすぐ右側にはマーカー23cが、右下の丸孔22dのすぐ右側にはマーカー23dがそれぞれ印されている。
【0047】
なお、図6に図示した例では、4箇所のマーカー23a〜23dはいずれも同じ形状のものを使用しているが、そのような使用には限らない。異なる形状、配色、配置やそれらを組み合わせて使用してもよい。
【0048】
トレイ20の種類毎に、搭載可能な部品や数量、およびそれに応じた作業内容などは異なるから、トレイ20に印すマーカー23のパターン(例えば、それぞれの形状や配置の組み合わせなど)は、トレイ20の種類毎に応じてそれぞれ異なるように定めて制御部100内(例えばパソコン110)に事前に登録しておく。また、実際に使用される可能性があるトレイ20の種類毎のマーカー23のパターンデータを、制御部100内(例えばパソコン110)に事前に登録しておく。さらに、トレイ20の種類毎に、マーカー23が印されている正確な位置やそのトレイ20を使用する場合のロボット3の作業内容なども併せて事前登録しておく。これにより、トレイ20の部品搭載面21上に印されているマーカー23を画像認識によって識別できれば、トレイ20の種類を判別するとともにその部品搭載面21に搭載されている部品情報や配置を求めることができ、さらに、そのトレイ20を使用する場合のロボット3の作業内容も判断できる。
【0049】
<トレイに印されたマーカーを用いる自動ティーチング(自動運転)>
トレイ20に印されたマーカー23を用いるロボット3などの自動ティーチングは、以下の各ステップによって行う。なお、これらに先立って、上述した可搬型カメラ8を、ロボットハンド31に対向するほぼ正面からトレイ20を見下ろすような位置に配置しておく。
【0050】
(1)可搬型カメラ8による、トレイ20に印されたマーカー23を含む撮像
まず、部品搭載用のトレイ20が、ロボットハンド31によって作業が行われるべき所定位置(図1の部品供給トレイ5、6が配置されている位置)に置かれた状態で、可搬型カメラ8によって、トレイ20の部品搭載面21に印された各マーカー23のすべてが含まれていて、できるだけ明瞭に写るように撮像を行う。このようにして撮像された画像が、パソコン110の画面に表示され、この画像の一例を図7に示す。
【0051】
(2)撮像された画像からのマーカー23検出および事前登録データとの照合
可搬型カメラ8によって撮像された画像を、パソコン110によって画像処理することによって、トレイ20の部品搭載面21に印されている各マーカー23を検出する。なお、マーカー23が正しく検出できたかどうかが作業者にも容易に視認できるように、例えば、検出したマーカー23を画面上で強調表示するようにしてもよい。強調表示は、具体的には、赤色で表示したり、所定のマークを表示したりすることなどが考えられるが、そのような表示態様に限るわけではない。
【0052】
さらに、検出されたマーカー23のデータを、事前に登録されているトレイ20の種類毎のマーカー23のパターンデータと照合し、いずれのパターンデータに該当するかを判断する。そして、該当すると判断されたパターンデータのマーカー23が印されているトレイ20を使用する場合のロボット3の作業内容も併せて取得する。
【0053】
このように、トレイ20が写った画像からマーカー23を検出するだけで、ロボット3の作業内容の概略ティーチングを作業者に代わって自動的に行うことができる。
【0054】
(3)マーカー23に応じた初期位置へロボットハンド31を移動
該当すると判断されたパターンデータのマーカー23に応じたロボット3の作業内容に従って、ロボットハンド31を初期位置へ移動させる。なお、この初期位置では、ロボットハンド31の小型カメラ34が、マーカー23の少なくとも1つを撮像できるようにしておく。
【0055】
(4)小型カメラ34による、トレイ20に印されたマーカー23を含む撮像
ロボットハンド31を初期位置へ移動させた後、ロボットハンド31の小型カメラ34によって、トレイ20の部品搭載面21に印されたマーカー23の少なくとも1つが含まれるように撮像を行う。このようにして撮像された画像が、パソコン110の画面に表示された一例を図8に示す。
【0056】
(5)撮像された画像からマーカー23の位置誤差を算出
小型カメラ34によって撮像された画像をパソコン110によって画像処理することによって、その画像に含まれているマーカー23およびその詳細な位置を検出する。そして、ロボットハンド31の初期位置におけるマーカー23の本来の位置データとの比較によってマーカー23の位置誤差を算出する。
【0057】
誤差が生じていればそれを補正して、以降のロボットハンド31の作業内容の制御データに反映させる。これにより、詳細ティーチングも自動的に行うことができることになる。
【0058】
その後は、位置誤差が補正された制御データに基づいてロボットハンド31を制御し、まず、最初の作業対象物をハンドリングできる位置へロボットハンド31を移動させる。そして、その位置での作業を実行して異常がなければ、登録されているそれ以降の作業内容を順次実行する。
【0059】
以上で説明した第1実施形態の構成によれば、作業者がティーチングペンダント10の操作によってロボットハンド3の位置を複雑に変更させることを繰り返したりすることなく、専ら、使用するトレイ20の種類毎に適切なマーカー23を印しておくことで自動的に運転することができ、正確な位置のティーチングを行う負荷が軽減する。これにより、ティーチング作業が極めて容易になるとともにティーチング所要時間も大幅に短縮可能となる。
【0060】
なお、以上の説明では作業対象物が搭載される領域は、マーカー23が印されたトレイ20の場合を説明したが、マーカー23を印した組立用治具7であってもよい。
【0061】
また、作業対象物によっては少しずれてもハンドリングできる場合や可搬型カメラ8の画像データからマーカー23の詳細な位置を検出できる場合などは、小型カメラ34による撮像を省略して、可搬型カメラ8で得られた画像データからマーカー23の位置を検出してもよい。
【0062】
また、あるマーカー23が検出された場合には、小型カメラ34による撮像を省略して、可搬型カメラ8の画像データからマーカー23の詳細な位置を検出し、あるマーカーが検出された場合には、小型カメラ34による撮像も行って、小型カメラ8の画像データからマーカー23の詳細な位置を検出するようにしてもよい。このように、マーカー23のより精度の高い詳細な位置を検出する場合にのみ、小型カメラ34による撮像を行うようにしてもよい。
【0063】
また、以上の説明では1回目の撮像は可搬型カメラ8で撮像を行い、2回目の撮像は小型カメラ34で行ったが、1回目及び2回目とも可搬型カメラ8で行ってもよいし、小型カメラ34で行ってもよい。
【0064】
<<<第2実施形態>>>
第2実施形態は、ロボットハンド31に行わせるべき作業全体あるいはその一部について、移動経路の始点および終点が予め定まっている場合などに、その途中の移動のためのティーチング作業を容易にするためのものである。例えば、始点と終点との間に障害物が存在するときなどに好適である。なお、以下の説明では、第1実施形態と相違する点を中心に説明する。
【0065】
この第2実施形態では、可搬型カメラ8は、図1に示されているように配置すればよいが、ズーム機能やパン機能を使用して対象とするロボットハンド31の動作する領域が専ら撮影できるように変更してもよい。また、この可搬型カメラ8で撮像される画像がティーチングペンダント10のタッチパネル式のディスプレイ(表示部)11に表示されるようにしておく。そのようにしたときのディスプレイ11の表示例を図9に示す。
【0066】
このとき、ロボットハンド31は、ディスプレイ11の左下に表示されている部品供給トレイ5のすぐ上に位置しているが、ここを作業の始点とする。また、ディスプレイ11の右下に表示されている別の部品供給トレイ5のすぐ上を作業の終点とする。なお、これらの始点および終点のロボット座標系における3次元座標は既知としておく。
【0067】
ロボットハンド31が、始点と終点との間をどのような経路で移動すべきかをティーチングするためには、以下の各ステップを実行する。
【0068】
(1)ティーチングペンダント10のディスプレイ11上で中継点を指示
ロボットハンド31が現在の始点から次にどの位置へ移動すべきか、つまり、移動経路上の中継点をタッチペンでディスプレイ11上に直接タッチすることによって指示する。ティーチングペンダント10は、ディスプレイ11でタッチされた位置の2次元座標を認識することができるので、その2次元座標を記憶しておく。
【0069】
このような操作を必要回数だけ繰り返すことによって、始点から終点までの間の中継点を順次指示する。中継点の指示が正しく行えたかどうかが容易に視認できるように、例えば、指示された位置にマーク(例えば文字「P」)を表示したり、始点と中継点との間、中継点間、および中継点と終点との間を線で結ぶなどの表示を行ってもよい。
【0070】
(2)ディスプレイ11上の2次元座標をロボット座標系の3次元座標に変換
ディスプレイ11上の2次元座標だけでは、ロボットハンド31のロボット座標系の3次元座標を一意に定めることはできない。そこで、ロボット座標系における3次元座標が既知である始点および終点を含む鉛直平面上に各中継点があることにすれば、各中継点のディスプレイ11上の2次元座標をロボット座標系の3次元座標へ変換できる。
【0071】
このようにして変換された各中継点のロボット座標系の3次元座標に基づいてロボットハンド31を制御することにより、ディスプレイ11上においてタッチペンで指示した通りの経路でロボットハンド31を移動させることができる。
【0072】
以上で説明した第2実施形態の構成によれば、作業者がティーチングペンダント10の操作によってロボットハンド31の位置を複雑に変更させることを繰り返したりすることなく、ティーチングペンダント10のディスプレイ11に表示された画像上で移動経路を指示するだけで、ロボットハンド31に所望の動作をさせることができる。これにより、ティーチング作業が極めて容易になるとともにティーチング所要時間も大幅に短縮可能となる。
【0073】
なお、ティーチングペンダント10の表示部に画像を表示させて作業者が指示する場合を説明したが、ティーチングペンダント10以外の場所において、表示部に画像を表示させて作業者が指示してもよい。
【0074】
<<<第3実施形態>>>
第3実施形態では、第1及び第2実施形態を組み合わせる。つまり、第1実施形態で説明したようにトレイ20及び組立用治具7のいずれについてもマーカーを付して自動ティーチング(自動運転)を行うとともに、トレイ20と組立用治具7との間にある障害物を避けるティーチングについては、第2実施形態で説明したように作業者が指示することによってティーチングを行う。これにより、大幅にティーチングの負荷を軽減することができる。
【0075】
本発明は、その主旨または主要な特徴から逸脱することなく、他のいろいろな形で実施することができる。そのため、上述の実施形態や実施例はあらゆる点で単なる例示にすぎず、限定的に解釈してはならない。本発明の範囲は特許請求の範囲によって示すものであって、明細書本文にはなんら拘束されない。さらに、特許請求の範囲の均等範囲に属する変形や変更は、全て本発明の範囲内のものである。
【符号の説明】
【0076】
1 ロボット制御システム
2 ワークテーブル
3 ロボット
5 部品供給トレイ
6 部品供給トレイ
7 組立用治具
30 ロボットアーム
31 ロボットハンド
32 チャック部
33 支持台
34 小型カメラ
4 ロボット
40 ロボットアーム
41 ロボットハンド
44 小型カメラ
8 可搬型カメラ
10 ティーチングペンダント
11 タッチパネル式ディスプレイ
12 グリップ
13 グリップ
14 非常停止ボタン
15 イネーブルスイッチ
20 トレイ
21 部品搭載面
22 丸孔
23 マーカー(目印)
100 制御部
105 撤去装置
106 撤去装置
110 パソコン
A、B コントローラ
W ワーク
【技術分野】
【0001】
本発明は、ロボット制御方法、ロボット制御プログラムおよびロボット制御方法に用いられるティーチングペンダントに関し、特に、作業者がティーチングペンダントなどを操作して実際のロボットハンドの位置の変更を繰り返すようなティーチング作業を行う必要がないロボット制御方法、ロボット制御プログラムおよびロボット制御方法に用いられるティーチングペンダントに関する。
【背景技術】
【0002】
産業用ロボットは、一般に、旋回可能かつ上下動可能なロボットアームと、ロボットアームの先端に設けられ、ワーク(部品)を把持するためのチャック部を有するロボットハンドと、ロボットアームおよびロボットハンドを所定の制御プログラムにしたがって駆動制御する制御部とを備えている。また、自動組立装置は、ワークテーブル面上のそれぞれ所定位置に配置された、多数の部品を収容する複数の部品供給トレイと、部品の組立てを行うための組立用治具とを有している。
【0003】
自動組立装置の運転時には、ロボットアームを駆動して、ロボットハンドを所定の部品供給トレイの位置まで移動させ、先端のチャック部で部品を把持する。この状態から、ロボットアームを駆動して、ロボットハンドを組立用治具の位置まで移動させ、チャック部に把持されていた部品を組立用治具に組み付ける。以下、同様の動作を繰り返すことにより、所望の機器が自動的に組み立てられることになる。
【0004】
このような産業用ロボットを含む自動組立装置においては、自動運転を開始する前に、ロボットに対して動作基準座標や動作手順等を教示するティーチングという作業が必要になる。従来のティーチング作業では、パソコン上のコンピュータシミュレーションなどにより、概略の座標位置を求めた後、作業者が、ティーチングペンダントやティーチングボックスを用いて実際にロボットハンドをマニュアル操作することにより、正確な座標位置の設定を行うようにしている(例えば、特許文献1および特許文献2参照)。
【0005】
上述したティーチング作業では、細かな座標位置の設定が非常に煩雑であって所要時間も長くなるという問題点があったため、ティーチング作業の簡略化およびティーチング時間の短縮を可能とする技術も提案されている(例えば、特許文献3参照)。
【0006】
この特許文献3で提案されているロボット制御システムは、ロボットアームと、ロボットアームの先端に設けられ、ワーク把持用チャック部を有するロボットハンドとを含むロボットと、前記ロボットに対してティーチング入力を行うための操作部と、少なくともワークを撮影できるカメラ部と、前記操作部にティーチング入力された所定の座標位置を前記カメラ部で撮影された画像に基づいて補正して、補正された座標位置に移動するように前記ロボットを駆動制御する制御部と、を備えることを特徴とするものである。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2000−354919号公報
【特許文献2】特開2006−043844号公報
【特許文献3】特開2009−000782号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかしながら、上述のような従来技術においてティーチングペンダントなどによるティーチング作業を行う際、少なくとも初回はロボットハンドの位置を複雑に変更させることを繰り返す必要がある。そのため、ティーチング作業はやはり非常に煩雑であって所要時間も長かった。
【0009】
最近では、ロボット導入台数の増加および製品の多種多様化に伴い、必要とされるティーチング工数が急増している。一方で、製造現場では慢性的に人員が不足しており、特にティーチング作業の熟練者が極めて不足している。また、製造現場で実際に使用されているロボットにティーチングを行うときには、そのロボットが設置されている製造ラインなどが停止することになるので、その製造ラインの稼働率が低下してしまう。
【0010】
従来技術のこのような課題に鑑み、本発明の第1の目的は、作業者がティーチングペンダントなどを操作して実際のロボットハンドの位置の変更を繰り返すティーチング作業を行うことなく、自動的にティーチングを行うことが可能なロボット制御方法およびロボット制御プログラムを提供することである。
【0011】
また、本発明の第2の目的は、作業者がティーチングペンダントなどを操作して実際のロボットハンドの位置の変更を繰り返すティーチング作業を行うことなく、ティーチングペンダントなどに表示される画像上をタッチペンで操作するなどの極めて簡単な操作のみでロボットハンドの移動経路を容易にティーチングできるロボット制御方法、ロボット制御プログラムおよびロボット制御方法に用いられるティーチングペンダントを提供することである。
【課題を解決するための手段】
【0012】
上記の第1の目的を達成するため、本発明のロボット制御方法は、作業対象物が搭載される領域を撮像する撮像工程と、前記撮像工程で撮像された画像データから目印に対応する初期位置を得る第1画像処理工程と、前記撮像工程で撮像された画像データから前記目印の位置を得る第2画像処理工程と、前記初期位置へロボットハンドを移動させる第1移動工程と、前記初期位置から前記目印の位置に基づいて前記作業対象物へ前記ロボットハンドを接近させる第2移動工程と、を備えたことを特徴とする。
【0013】
このような構成のロボット制御システムの教示方法によれば、作業者がティーチングペンダントなどを操作して実際のロボットハンドの位置の変更を繰り返すティーチング作業を行うことなく、ティーチングの負荷が軽減する。
【0014】
また、本発明のロボット制御方法において、前記撮像工程は、前記第1画像処理工程用の画像データを撮像する第1撮像工程と、前記第2画像処理工程用の画像データを撮像する第2撮像工程と、を含み、前記第2撮像工程は、前記初期位置から前記領域を撮像することが好ましい。
【0015】
このような構成のロボット制御方法によれば、初期位置から前記領域を撮像するので、ロボットハンドから眺めた目印の正確な位置を把握することができ、また、目印が隠されることがなく、作業対象物へのアクセスの正確性が増す。
【0016】
また、本発明のロボット制御方法において、前記第2撮像工程における撮像は、前記ロボットハンドに設けられたカメラによって行われることが好ましい。
【0017】
このような構成のロボット制御方法によれば、ロボットハンドがカメラを初期位置に位置させるので、カメラを作業者が初期位置に予め設置する必要がない。
【0018】
あるいは、上記の第2の目的を達成するため、本発明のロボット制御方法は、ロボットハンドが動作する領域を撮像する撮像工程と、前記撮像工程で撮像された画像上で作業者によって指示された第1の位置を付加する第1画像処理工程と、前記第1画像処理工程の後、前記撮像工程で撮像された前記画像上で前記作業者によって指示された第2の位置を付加する第2画像処理工程と、前記第1の位置へロボットハンドを移動させる第1移動工程と、前記第1の位置から前記第2の位置へ前記ロボットハンドを移動させる第2移動工程と、を備えたことを特徴とする。
【0019】
このような構成のロボット制御方法によれば、作業者がティーチングペンダントなどを操作して実際のロボットハンドの位置の変更を繰り返すティーチング作業を行うことなく、作業者が画像上に第1の位置及び第2の位置を順に指示する極めて簡単な操作のみでロボットハンドの第1の位置から第2の位置までの移動経路を容易にティーチングすることが可能となり、ティーチングの負荷が軽減する。
【0020】
また、このようなロボット制御方法をコンピュータに実行させるためのロボット制御プログラムも本発明の範疇である。
【0021】
また、本発明のロボット制御方法は、前記第1及び第2画像処理工程は前記画像データをティーチングペンダントの表示部に表示する工程と、前記表示部に表示された前記画像上で作業者によって触れられた箇所を前記第1及び第2の位置として指示する工程と、を含むことを特徴とする。
【0022】
このような構成のロボット制御方法によれば、作業者がティーチングペンダントの表示部の画像上を触れる極めて簡単な操作のみでロボットハンドの第1の位置から第2の位置までの移動経路を容易にティーチングすることが可能となる。
【0023】
また、本発明のロボット制御方法は、前記第1及び第2画像処理工程は、前記前記表示部上の指示された箇所に所定の表示を行う工程を含む。
【0024】
このような構成のロボット制御方法によれば、作業者がロボットの移動経路を画像上で確認できる。
【発明の効果】
【0025】
本発明のロボット制御方法によれば、作業者がティーチングペンダントなどを操作して実際のロボットハンドの位置の変更を繰り返すティーチング作業を行うことなく、ティーチングの負荷が軽減する。
【図面の簡単な説明】
【0026】
【図1】本発明の第1実施形態に係るロボット制御システム1の平面概略図である。
【図2】ロボット制御システム1で制御されるロボット3の側面斜視図である。
【図3】ロボット3が有するロボットアーム30の先端に設けられるロボットハンド31の拡大斜視図である。
【図4】ロボット制御システム1のティーチングに使用されるティーチングペンダント10の正面拡大図である。
【図5】ロボット制御システム1の制御部100のブロック構成図である。
【図6】第1実施形態で使用されるトレイ20の一例の概略を示す平面図である。
【図7】可搬型カメラ8によって撮像され、トレイ20のマーカー23がすべて写っている画像がパソコン110の画面に表示された一例を示す図である。
【図8】ロボットハンド31の小型カメラ34によって撮像され、トレイ20のマーカー23の1つが写っている画像がパソコン110の画面に表示された一例を示す図である。
【図9】本発明の第2実施形態において、可搬型カメラ8によって撮像された画像がティーチングペンダント10のディスプレイ11に表示された一例を示す図である。
【発明を実施するための形態】
【0027】
以下、本発明の実施形態を、図面を参照して説明する。
【0028】
<<<第1実施形態>>>
<ロボット制御システム1の構成>
図1は本発明の第1実施形態に係るロボット制御システム1の平面概略図である。図2はこのロボット制御システム1で制御されるロボット3の側面斜視図である。図3はこのロボット3が有するロボットアーム30の先端に設けられるロボットハンド31の拡大斜視図である。図4はロボット制御システム1のティーチングに使用されるティーチングペンダント10の正面拡大図である。
【0029】
図1に示すように、ロボット制御システム1は、ワークテーブル2上に離隔配置された2つの組立用ロボット3、4を備えている。ロボット3、4はいずれも多関節ロボットであって、複数のロボットアーム30、40をそれぞれ有している。先端側のロボットアーム30、40の先端には、ロボットハンド31、41がそれぞれ設けられている。
【0030】
ワークテーブル2上の一側部には、それぞれ多数の部品(ワーク)(図示せず)を収容する複数の部品供給トレイ5、6が整列して配置されている。これらの部品供給トレイ5、6は、図示しない搬入装置によって、ワークテーブル2上に搬入されるようになっている。ワークテーブル2上において、略中央位置には、各ロボット3、4により部品の組立作業が行われる組立用治具7が取り付けられている。ワークテーブル2の下方には、それぞれロボット3、4を駆動制御するためのコントローラA、Bが設けられている。また、ワークテーブル2の一側方には、ロボットアーム30、40の可動範囲全体を撮影するための可搬型カメラ8が配置されている。可搬型カメラ8は、部品供給トレイ5、6周辺や組立用治具7周辺を撮像するためにレンズを振るパン機能及びレンズが向けられた方向を拡大して撮像するためのズーム機能を有するものが好ましい。
【0031】
ロボット3は、図2に示すように、先端側のロボットアーム30の先端に着脱自在なロボットハンド31を有している。ロボットハンド31には、複数のワーク把持用チャック部32が設けられている。
【0032】
チャック部32は、図3に示すように、支持台33に支持されている。支持台33には、チャック部32を駆動する駆動機構が内蔵されている。ロボットハンド31は、ベース板31Aを有している。図示された4つの支持台33のうちの一つが、ベース板31A上において図示矢印方向に移動可能に設けられており、この移動可能な支持台33の側面には、チャック部32の先端を撮影するための例えばビジョンカメラまたはCCD等の小型カメラ34が取り付けられている。
【0033】
なお、ロボット4のロボットハンド41についても同様の構成を有しているため、ここでは、説明を省略する。
【0034】
また、このロボット制御システム1は、図4に示すようなティーチングペンダント(操作部、可搬型の教示装置)10を有している。ティーチングペンダント10は、カメラ8又はロボットハンド31のカメラ34で撮影された画像を表示するためのLCD(液晶)ディスプレイ11と、操作者が握るための左右のグリップ12、13と、非常停止スイッチ14とを備えている。
【0035】
ディスプレイ11は、タッチパネル式のディスプレイである。また、ディスプレイ11の左右両側には、起動、停止、ティーチングなどのロボット操作用の押しボタンスイッチ11aが複数個設けられている。グリップ12の裏面には、ティーチング時や試運転時などの非定常作業時に操作者が危険を回避するための3ポジション方式のイネーブルスイッチ15(図5参照)が設けられている。
【0036】
次に、ロボット制御システム1の制御部について図5を用いて説明する。図5はロボット制御システム1の制御部100のブロック構成図である。
【0037】
制御部100は記憶部とコンピュータを含んでいる。記憶部は以下に説明するロボット制御方法を実行するためのコンピュータプログラムが記憶され、コンピュータは当該プログラムを実行する。 詳細には制御部100は例えば図5に示すようにロボット3のコントローラAと、ロボット4のコントローラBとパソコン110を含んで構成されている。コントローラA、Bは互いに通信可能に構成されている。
【0038】
コントローラAの入力側には、ティーチングペンダント10がワイヤレスで接続されている。ティーチングペンダント10には、上述したように、タッチパネル式のディスプレイ11、非常停止スイッチ14およびイネーブルスイッチ15が接続されている。また、コントローラAの入力側には、小型カメラ34および可搬型カメラ8が接続されている。
【0039】
コントローラAの出力側には、ロボットアーム30およびロボットハンド31を駆動するためのモータma1〜manが接続されている。また、コントローラAの出力側には、自動運転中の「チョコ停」の発生時に仕掛品をワークテーブル2上から撤去するための撤去装置105が接続されている。この撤去装置105は、ロボットハンド31に設けられており、好ましくは、ロボットハンド31におけるいずれかのチャック部32が撤去装置105として機能している。なお、ワークテーブル2上に向けて圧搾空気を噴出させるためのエアーノズルを撤去装置105に設けるようにしてもよいし、このエアーノズルをロボットハンド31に設けるようにしてもよい。
【0040】
コントローラAの出力側には、さらにパソコン110が接続されている。パソコン110は、ティーチング時のシミュレーションを行うだけでなく、可搬型カメラ8で撮影した自動運転中の映像をモニターするのに用いられている。パソコン110は、コントローラAに無線LANで接続されている。なお、自動運転中の映像は、ティーチングペンダント10に表示するようにしてもよい。
【0041】
一方、コントローラBの入力側には、同様にロボット4において、ロボットハンド41のチャック部の支持台に設けられた小型カメラ44が接続されている。また、コントローラBの出力側には、ロボットアーム40およびロボットハンド41を駆動するためのモータmb1〜mbnと、撤去装置105と同様の撤去装置106とが接続されている。
【0042】
<部品搭載用のトレイ20およびその種類などを識別するためのマーカー23>
図6は第1実施形態で使用される部品供給トレイ5、6であるトレイ20の一例の概略を示す平面図である。このトレイ20は、複数の部品を同時に整列配置可能な構造を有しており、その部品搭載面21の周辺部などにトレイの種類および位置を識別可能にするために複数の目印であるマーカー23(23a〜23d)が印されている。これらのマーカー23は、部品搭載面21において、部品を搭載しても隠されることがないような位置、例えば、部品搭載面21の周辺部などに印すことが好ましい。
【0043】
なお、以下の説明では、マーカー23a〜23dのそれぞれの特定が必要でない場合は、マーカー23として総称する。また、ロボット3についてのティーチングの例を説明するが、ロボット4でも同様のティーチングが可能である。
【0044】
これらのマーカー23はそれぞれ、円形であり、中心角が45度の白で塗られた扇形232及び黒で塗られた扇形231に塗り分けられていることが望ましい。このように黒及び白でマーカの模様を構成することで、画像処理によってマーカ23a〜23dの中心の位置を正確かつ容易に検出することができる。
【0045】
図6に示すように、このトレイ20は具体的には押しボタンスイッチの自動組立作業などに使用される横長矩形平板状のトレイであって、部品搭載面21の6行×9列の格子位置に、各押しボタンスイッチSWの下側の軸を挿入することによって複数の押しボタンスイッチSWを整列配置可能な丸孔22がそれぞれ設けられている。
【0046】
これらの丸孔22のうちで左上の丸孔22aのすぐ左側にはマーカー23aが、左下の丸孔22bのすぐ左側にはマーカー23bが、右上の丸孔22cのすぐ右側にはマーカー23cが、右下の丸孔22dのすぐ右側にはマーカー23dがそれぞれ印されている。
【0047】
なお、図6に図示した例では、4箇所のマーカー23a〜23dはいずれも同じ形状のものを使用しているが、そのような使用には限らない。異なる形状、配色、配置やそれらを組み合わせて使用してもよい。
【0048】
トレイ20の種類毎に、搭載可能な部品や数量、およびそれに応じた作業内容などは異なるから、トレイ20に印すマーカー23のパターン(例えば、それぞれの形状や配置の組み合わせなど)は、トレイ20の種類毎に応じてそれぞれ異なるように定めて制御部100内(例えばパソコン110)に事前に登録しておく。また、実際に使用される可能性があるトレイ20の種類毎のマーカー23のパターンデータを、制御部100内(例えばパソコン110)に事前に登録しておく。さらに、トレイ20の種類毎に、マーカー23が印されている正確な位置やそのトレイ20を使用する場合のロボット3の作業内容なども併せて事前登録しておく。これにより、トレイ20の部品搭載面21上に印されているマーカー23を画像認識によって識別できれば、トレイ20の種類を判別するとともにその部品搭載面21に搭載されている部品情報や配置を求めることができ、さらに、そのトレイ20を使用する場合のロボット3の作業内容も判断できる。
【0049】
<トレイに印されたマーカーを用いる自動ティーチング(自動運転)>
トレイ20に印されたマーカー23を用いるロボット3などの自動ティーチングは、以下の各ステップによって行う。なお、これらに先立って、上述した可搬型カメラ8を、ロボットハンド31に対向するほぼ正面からトレイ20を見下ろすような位置に配置しておく。
【0050】
(1)可搬型カメラ8による、トレイ20に印されたマーカー23を含む撮像
まず、部品搭載用のトレイ20が、ロボットハンド31によって作業が行われるべき所定位置(図1の部品供給トレイ5、6が配置されている位置)に置かれた状態で、可搬型カメラ8によって、トレイ20の部品搭載面21に印された各マーカー23のすべてが含まれていて、できるだけ明瞭に写るように撮像を行う。このようにして撮像された画像が、パソコン110の画面に表示され、この画像の一例を図7に示す。
【0051】
(2)撮像された画像からのマーカー23検出および事前登録データとの照合
可搬型カメラ8によって撮像された画像を、パソコン110によって画像処理することによって、トレイ20の部品搭載面21に印されている各マーカー23を検出する。なお、マーカー23が正しく検出できたかどうかが作業者にも容易に視認できるように、例えば、検出したマーカー23を画面上で強調表示するようにしてもよい。強調表示は、具体的には、赤色で表示したり、所定のマークを表示したりすることなどが考えられるが、そのような表示態様に限るわけではない。
【0052】
さらに、検出されたマーカー23のデータを、事前に登録されているトレイ20の種類毎のマーカー23のパターンデータと照合し、いずれのパターンデータに該当するかを判断する。そして、該当すると判断されたパターンデータのマーカー23が印されているトレイ20を使用する場合のロボット3の作業内容も併せて取得する。
【0053】
このように、トレイ20が写った画像からマーカー23を検出するだけで、ロボット3の作業内容の概略ティーチングを作業者に代わって自動的に行うことができる。
【0054】
(3)マーカー23に応じた初期位置へロボットハンド31を移動
該当すると判断されたパターンデータのマーカー23に応じたロボット3の作業内容に従って、ロボットハンド31を初期位置へ移動させる。なお、この初期位置では、ロボットハンド31の小型カメラ34が、マーカー23の少なくとも1つを撮像できるようにしておく。
【0055】
(4)小型カメラ34による、トレイ20に印されたマーカー23を含む撮像
ロボットハンド31を初期位置へ移動させた後、ロボットハンド31の小型カメラ34によって、トレイ20の部品搭載面21に印されたマーカー23の少なくとも1つが含まれるように撮像を行う。このようにして撮像された画像が、パソコン110の画面に表示された一例を図8に示す。
【0056】
(5)撮像された画像からマーカー23の位置誤差を算出
小型カメラ34によって撮像された画像をパソコン110によって画像処理することによって、その画像に含まれているマーカー23およびその詳細な位置を検出する。そして、ロボットハンド31の初期位置におけるマーカー23の本来の位置データとの比較によってマーカー23の位置誤差を算出する。
【0057】
誤差が生じていればそれを補正して、以降のロボットハンド31の作業内容の制御データに反映させる。これにより、詳細ティーチングも自動的に行うことができることになる。
【0058】
その後は、位置誤差が補正された制御データに基づいてロボットハンド31を制御し、まず、最初の作業対象物をハンドリングできる位置へロボットハンド31を移動させる。そして、その位置での作業を実行して異常がなければ、登録されているそれ以降の作業内容を順次実行する。
【0059】
以上で説明した第1実施形態の構成によれば、作業者がティーチングペンダント10の操作によってロボットハンド3の位置を複雑に変更させることを繰り返したりすることなく、専ら、使用するトレイ20の種類毎に適切なマーカー23を印しておくことで自動的に運転することができ、正確な位置のティーチングを行う負荷が軽減する。これにより、ティーチング作業が極めて容易になるとともにティーチング所要時間も大幅に短縮可能となる。
【0060】
なお、以上の説明では作業対象物が搭載される領域は、マーカー23が印されたトレイ20の場合を説明したが、マーカー23を印した組立用治具7であってもよい。
【0061】
また、作業対象物によっては少しずれてもハンドリングできる場合や可搬型カメラ8の画像データからマーカー23の詳細な位置を検出できる場合などは、小型カメラ34による撮像を省略して、可搬型カメラ8で得られた画像データからマーカー23の位置を検出してもよい。
【0062】
また、あるマーカー23が検出された場合には、小型カメラ34による撮像を省略して、可搬型カメラ8の画像データからマーカー23の詳細な位置を検出し、あるマーカーが検出された場合には、小型カメラ34による撮像も行って、小型カメラ8の画像データからマーカー23の詳細な位置を検出するようにしてもよい。このように、マーカー23のより精度の高い詳細な位置を検出する場合にのみ、小型カメラ34による撮像を行うようにしてもよい。
【0063】
また、以上の説明では1回目の撮像は可搬型カメラ8で撮像を行い、2回目の撮像は小型カメラ34で行ったが、1回目及び2回目とも可搬型カメラ8で行ってもよいし、小型カメラ34で行ってもよい。
【0064】
<<<第2実施形態>>>
第2実施形態は、ロボットハンド31に行わせるべき作業全体あるいはその一部について、移動経路の始点および終点が予め定まっている場合などに、その途中の移動のためのティーチング作業を容易にするためのものである。例えば、始点と終点との間に障害物が存在するときなどに好適である。なお、以下の説明では、第1実施形態と相違する点を中心に説明する。
【0065】
この第2実施形態では、可搬型カメラ8は、図1に示されているように配置すればよいが、ズーム機能やパン機能を使用して対象とするロボットハンド31の動作する領域が専ら撮影できるように変更してもよい。また、この可搬型カメラ8で撮像される画像がティーチングペンダント10のタッチパネル式のディスプレイ(表示部)11に表示されるようにしておく。そのようにしたときのディスプレイ11の表示例を図9に示す。
【0066】
このとき、ロボットハンド31は、ディスプレイ11の左下に表示されている部品供給トレイ5のすぐ上に位置しているが、ここを作業の始点とする。また、ディスプレイ11の右下に表示されている別の部品供給トレイ5のすぐ上を作業の終点とする。なお、これらの始点および終点のロボット座標系における3次元座標は既知としておく。
【0067】
ロボットハンド31が、始点と終点との間をどのような経路で移動すべきかをティーチングするためには、以下の各ステップを実行する。
【0068】
(1)ティーチングペンダント10のディスプレイ11上で中継点を指示
ロボットハンド31が現在の始点から次にどの位置へ移動すべきか、つまり、移動経路上の中継点をタッチペンでディスプレイ11上に直接タッチすることによって指示する。ティーチングペンダント10は、ディスプレイ11でタッチされた位置の2次元座標を認識することができるので、その2次元座標を記憶しておく。
【0069】
このような操作を必要回数だけ繰り返すことによって、始点から終点までの間の中継点を順次指示する。中継点の指示が正しく行えたかどうかが容易に視認できるように、例えば、指示された位置にマーク(例えば文字「P」)を表示したり、始点と中継点との間、中継点間、および中継点と終点との間を線で結ぶなどの表示を行ってもよい。
【0070】
(2)ディスプレイ11上の2次元座標をロボット座標系の3次元座標に変換
ディスプレイ11上の2次元座標だけでは、ロボットハンド31のロボット座標系の3次元座標を一意に定めることはできない。そこで、ロボット座標系における3次元座標が既知である始点および終点を含む鉛直平面上に各中継点があることにすれば、各中継点のディスプレイ11上の2次元座標をロボット座標系の3次元座標へ変換できる。
【0071】
このようにして変換された各中継点のロボット座標系の3次元座標に基づいてロボットハンド31を制御することにより、ディスプレイ11上においてタッチペンで指示した通りの経路でロボットハンド31を移動させることができる。
【0072】
以上で説明した第2実施形態の構成によれば、作業者がティーチングペンダント10の操作によってロボットハンド31の位置を複雑に変更させることを繰り返したりすることなく、ティーチングペンダント10のディスプレイ11に表示された画像上で移動経路を指示するだけで、ロボットハンド31に所望の動作をさせることができる。これにより、ティーチング作業が極めて容易になるとともにティーチング所要時間も大幅に短縮可能となる。
【0073】
なお、ティーチングペンダント10の表示部に画像を表示させて作業者が指示する場合を説明したが、ティーチングペンダント10以外の場所において、表示部に画像を表示させて作業者が指示してもよい。
【0074】
<<<第3実施形態>>>
第3実施形態では、第1及び第2実施形態を組み合わせる。つまり、第1実施形態で説明したようにトレイ20及び組立用治具7のいずれについてもマーカーを付して自動ティーチング(自動運転)を行うとともに、トレイ20と組立用治具7との間にある障害物を避けるティーチングについては、第2実施形態で説明したように作業者が指示することによってティーチングを行う。これにより、大幅にティーチングの負荷を軽減することができる。
【0075】
本発明は、その主旨または主要な特徴から逸脱することなく、他のいろいろな形で実施することができる。そのため、上述の実施形態や実施例はあらゆる点で単なる例示にすぎず、限定的に解釈してはならない。本発明の範囲は特許請求の範囲によって示すものであって、明細書本文にはなんら拘束されない。さらに、特許請求の範囲の均等範囲に属する変形や変更は、全て本発明の範囲内のものである。
【符号の説明】
【0076】
1 ロボット制御システム
2 ワークテーブル
3 ロボット
5 部品供給トレイ
6 部品供給トレイ
7 組立用治具
30 ロボットアーム
31 ロボットハンド
32 チャック部
33 支持台
34 小型カメラ
4 ロボット
40 ロボットアーム
41 ロボットハンド
44 小型カメラ
8 可搬型カメラ
10 ティーチングペンダント
11 タッチパネル式ディスプレイ
12 グリップ
13 グリップ
14 非常停止ボタン
15 イネーブルスイッチ
20 トレイ
21 部品搭載面
22 丸孔
23 マーカー(目印)
100 制御部
105 撤去装置
106 撤去装置
110 パソコン
A、B コントローラ
W ワーク
【特許請求の範囲】
【請求項1】
作業対象物が搭載される領域を撮像する撮像工程と、
前記撮像工程で撮像された画像データから目印に対応する初期位置を得る第1画像処理工程と、
前記撮像工程で撮像された画像データから前記目印の位置を得る第2画像処理工程と、
前記初期位置へロボットハンドを移動させる第1移動工程と、
前記初期位置から前記目印の位置に基づいて前記作業対象物へ前記ロボットハンドを接近させる第2移動工程と、
を備えたことを特徴とするロボット制御方法。
【請求項2】
前記撮像工程は、
前記第1画像処理工程用の画像データを撮像する第1撮像工程と、
前記第2画像処理工程用の画像データを撮像する第2撮像工程と、
を含み、
前記第2撮像工程は、前記初期位置から前記領域を撮像する請求項1に記載のロボット制御方法。
【請求項3】
前記第2撮像工程における撮像は、前記ロボットハンドに設けられたカメラによって行われる請求項2に記載のロボット制御方法。
【請求項4】
ロボットハンドが動作する領域を撮像する撮像工程と、
前記撮像工程で撮像された画像上で作業者によって指示された第1の位置を付加する第1画像処理工程と、
前記第1画像処理工程の後、前記撮像工程で撮像された前記画像上で前記作業者によって指示された第2の位置を付加する第2画像処理工程と、
前記第1の位置へロボットハンドを移動させる第1移動工程と、
前記第1の位置から前記第2の位置へ前記ロボットハンドを移動させる第2移動工程と、
を備えたことを特徴とするロボット制御方法。
【請求項5】
前記第1及び第2画像処理工程は
前記画像データをティーチングペンダントの表示部に表示する工程と、
前記表示部に表示された画像上で前記作業者によって触れられた箇所を前記第1及び第2の位置として指示する工程と、
を含む請求項4に記載のロボット制御方法。
【請求項6】
前記第1及び第2画像処理工程は、
前記前記表示部上の指示された箇所に所定の表示を行う工程を含む請求項5に記載のロボット制御方法。
【請求項7】
請求項1から6までのいずれかに記載のロボット制御方法をコンピュータに実行させるためのロボット制御プログラム。
【請求項8】
請求項5に記載のロボット制御方法に用いられるティーチングペンダント。
【請求項1】
作業対象物が搭載される領域を撮像する撮像工程と、
前記撮像工程で撮像された画像データから目印に対応する初期位置を得る第1画像処理工程と、
前記撮像工程で撮像された画像データから前記目印の位置を得る第2画像処理工程と、
前記初期位置へロボットハンドを移動させる第1移動工程と、
前記初期位置から前記目印の位置に基づいて前記作業対象物へ前記ロボットハンドを接近させる第2移動工程と、
を備えたことを特徴とするロボット制御方法。
【請求項2】
前記撮像工程は、
前記第1画像処理工程用の画像データを撮像する第1撮像工程と、
前記第2画像処理工程用の画像データを撮像する第2撮像工程と、
を含み、
前記第2撮像工程は、前記初期位置から前記領域を撮像する請求項1に記載のロボット制御方法。
【請求項3】
前記第2撮像工程における撮像は、前記ロボットハンドに設けられたカメラによって行われる請求項2に記載のロボット制御方法。
【請求項4】
ロボットハンドが動作する領域を撮像する撮像工程と、
前記撮像工程で撮像された画像上で作業者によって指示された第1の位置を付加する第1画像処理工程と、
前記第1画像処理工程の後、前記撮像工程で撮像された前記画像上で前記作業者によって指示された第2の位置を付加する第2画像処理工程と、
前記第1の位置へロボットハンドを移動させる第1移動工程と、
前記第1の位置から前記第2の位置へ前記ロボットハンドを移動させる第2移動工程と、
を備えたことを特徴とするロボット制御方法。
【請求項5】
前記第1及び第2画像処理工程は
前記画像データをティーチングペンダントの表示部に表示する工程と、
前記表示部に表示された画像上で前記作業者によって触れられた箇所を前記第1及び第2の位置として指示する工程と、
を含む請求項4に記載のロボット制御方法。
【請求項6】
前記第1及び第2画像処理工程は、
前記前記表示部上の指示された箇所に所定の表示を行う工程を含む請求項5に記載のロボット制御方法。
【請求項7】
請求項1から6までのいずれかに記載のロボット制御方法をコンピュータに実行させるためのロボット制御プログラム。
【請求項8】
請求項5に記載のロボット制御方法に用いられるティーチングペンダント。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2011−110627(P2011−110627A)
【公開日】平成23年6月9日(2011.6.9)
【国際特許分類】
【出願番号】特願2009−266808(P2009−266808)
【出願日】平成21年11月24日(2009.11.24)
【国等の委託研究の成果に係る記載事項】(出願人による申告)国等の委託研究の成果に係る特許出願(平成21年度独立行政法人新エネルギー・産業技術総合開発機構「次世代ロボット知能化技術開発プロジェクト・作業知能(生産分野)の開発・世界標準を目指したロボットセル生産用知能ハンドモジュール群とマニュアル作業激減知能モジュール群の開発と検証」委託研究、産業技術力強化法第19条の適用を受ける特許出願)
【出願人】(000000309)IDEC株式会社 (188)
【Fターム(参考)】
【公開日】平成23年6月9日(2011.6.9)
【国際特許分類】
【出願日】平成21年11月24日(2009.11.24)
【国等の委託研究の成果に係る記載事項】(出願人による申告)国等の委託研究の成果に係る特許出願(平成21年度独立行政法人新エネルギー・産業技術総合開発機構「次世代ロボット知能化技術開発プロジェクト・作業知能(生産分野)の開発・世界標準を目指したロボットセル生産用知能ハンドモジュール群とマニュアル作業激減知能モジュール群の開発と検証」委託研究、産業技術力強化法第19条の適用を受ける特許出願)
【出願人】(000000309)IDEC株式会社 (188)
【Fターム(参考)】
[ Back to top ]