
不平衡率検出装置、および不平衡率検出方法
【課題】簡単な演算処理で不平衡率を検出することができる不平衡率検出装置を提供する。
【解決手段】三相交流の不平衡率を検出する不平衡率検出装置1において、検出された3つの相電圧信号をα軸電圧信号およびβ軸電圧信号に変換する三相/二相変換部21と、下記行列を用いてα軸電圧信号およびβ軸電圧信号から正相分の信号を抽出する正相分抽出部22と、下記行列の(1,2)要素と(2,1)要素を入れ換えた行列を用いて逆相分の信号を抽出する逆相分抽出部23と、抽出された正相分の信号と逆相分の信号とから不平衡率を算出する不平衡率算出部24とを備えた。
【数1】

【解決手段】三相交流の不平衡率を検出する不平衡率検出装置1において、検出された3つの相電圧信号をα軸電圧信号およびβ軸電圧信号に変換する三相/二相変換部21と、下記行列を用いてα軸電圧信号およびβ軸電圧信号から正相分の信号を抽出する正相分抽出部22と、下記行列の(1,2)要素と(2,1)要素を入れ換えた行列を用いて逆相分の信号を抽出する逆相分抽出部23と、抽出された正相分の信号と逆相分の信号とから不平衡率を算出する不平衡率算出部24とを備えた。
【数1】
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、三相交流の不平衡率を検出する不平衡率検出装置、および不平衡率検出方法に関する。
【背景技術】
【0002】
従来、三相交流の不平衡率を検出する不平衡率検出装置が開発されている。
【0003】
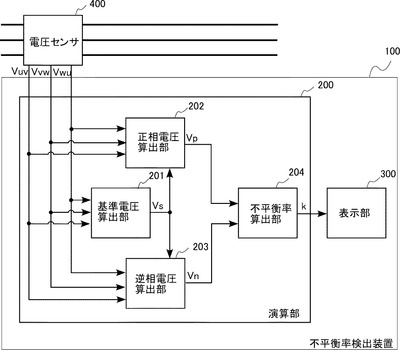
図10は、従来の一般的な不平衡率検出装置を説明するためのブロック図である。
【0004】
不平衡率検出装置100は、三相電力系統の三相交流電圧の不平衡率を検出するものである。なお、以下では三相電力系統の3つの相をそれぞれU相、V相およびW相とする。電圧センサ400は、三相電力系統の各線間電圧を検出するものであり、V相に対するU相の線間電圧を検出した線間電圧信号Vuv、W相に対するV相の線間電圧を検出した線間電圧信号Vvw、U相に対するW相の線間電圧を検出した線間電圧信号Vwuを不平衡率検出装置100に出力する。不平衡率検出装置100は、電圧センサ400より入力される線間電圧信号Vuv,Vvw,Vwuに基づいて不平衡率を検出する。
【0005】
不平衡率検出装置100は、演算部200および表示部300を備えている。演算部200は、不平衡率を演算するものであり、例えばマイクロコンピュータなどによって実現されている。演算部200は、演算結果である不平衡率kを表示部300に出力する。表示部300は、演算結果を表示するものであり、モニタなどの表示手段によって実現されている。表示部300は、演算部200より入力された不平衡率kを表示する。演算部200は、基準電圧算出部201、正相電圧算出部202、逆相電圧算出部203、および不平衡率算出部204を備えている。
【0006】
基準電圧算出部201は、電圧センサ400より入力される線間電圧信号Vuv,Vvw,Vwuから、下記(1)式により、基準電圧Vsを算出するものである。基準電圧算出部201は、算出した基準電圧Vsを正相電圧算出部202および逆相電圧算出部203に出力する。
Vs = (Vuv+Vvw+Vwu)/2 ・・・・・(1)
【0007】
正相電圧算出部202は、線間電圧信号Vuv,Vvw,Vwuと、基準電圧算出部201より入力される基準電圧Vsとから、下記(2)式により、正相電圧Vpを算出するものである。正相電圧算出部202は、算出した正相電圧Vpを不平衡率算出部204に出力する。
【数1】
【0008】
逆相電圧算出部203は、線間電圧信号Vuv,Vvw,Vwuと、基準電圧算出部201より入力される基準電圧Vsとから、下記(3)式により、逆相電圧Vnを算出するものである。逆相電圧算出部203は、算出した逆相電圧Vnを不平衡率算出部204に出力する。
【数2】
【0009】
不平衡率算出部204は、正相電圧算出部202より入力される正相電圧Vpと逆相電圧算出部203より入力される逆相電圧Vnとから、下記(4)式により、不平衡率kを算出するものである。不平衡率算出部204は、算出した不平衡率kを表示部300に出力する。
k = (Vn/Vp)×100 [%] ・・・・・(4)
【先行技術文献】
【特許文献】
【0010】
【特許文献1】特開平10−232254号公報
【発明の概要】
【発明が解決しようとする課題】
【0011】
しかしながら、不平衡率検出装置100の場合、演算部200で行われる演算処理が複雑になるという問題があった。
【0012】
本発明は上記した事情のもとで考え出されたものであって、より簡単な演算処理で不平衡率を検出することができる不平衡率検出装置を提供することをその目的としている。
【課題を解決するための手段】
【0013】
上記課題を解決するため、本発明では、次の技術的手段を講じている。
【0014】
本発明の第1の側面によって提供される不平衡率検出装置は、三相交流に基づく3つの信号を第1の信号および第2の信号に変換する三相二相変換手段と、前記第1の信号に含まれる正相分の信号である第1の正相分信号と、前記第2の信号に含まれる正相分の信号である第2の正相分信号とを、それぞれ抽出する正相分抽出手段と、前記第1の信号に含まれる逆相分の信号である第1の逆相分信号と、前記第2の信号に含まれる逆相分の信号である第2の逆相分信号とを、それぞれ抽出する逆相分抽出手段と、前記正相分抽出手段によって抽出された前記第1の正相分信号および前記第2の正相分信号と、前記逆相分抽出手段によって抽出された前記第1の逆相分信号および前記第2の逆相分信号とから、不平衡率を算出する不平衡率算出手段とを備えており、前記正相分抽出手段は、前記第1の信号を第1の伝達関数によって信号処理し、前記第2の信号を第2の伝達関数によって信号処理し、これらを加算することで前記第1の正相分信号を抽出し、前記第1の信号を第3の伝達関数によって信号処理し、前記第2の信号を前記第1の伝達関数によって信号処理し、これらを加算することで前記第2の正相分信号を抽出し、前記逆相分抽出手段は、前記第1の信号を前記第1の伝達関数によって信号処理し、前記第2の信号を前記第3の伝達関数によって信号処理し、これらを加算することで前記第1の逆相分信号を抽出し、前記第1の信号を前記第2の伝達関数によって信号処理し、前記第2の信号を前記第1の伝達関数によって信号処理し、これらを加算することで前記第2の逆相分信号を抽出し、前記三相交流の基本波の角周波数をω0、時定数をTとした場合、前記第1の伝達関数は、
G1(s)=(T・s+1)/{(T・s+1)2+(T・ω0)2}
であり、前記第2の伝達関数は、
G2(s)=−T・ω0/{(T・s+1)2+(T・ω0)2}
であり、前記第3の伝達関数は、
G3(s)=T・ω0/{(T・s+1)2+(T・ω0)2}
であることを特徴とする。なお、「正相分の信号」とは、三相交流の基本波と周波数が同じで相順が同じ信号であり、「逆相分の信号」とは、三相交流の基本波と周波数が同じで相順が逆の信号である。
【0015】
本発明の第1の側面によって提供される不平衡率検出装置は、三相交流に基づく3つの信号を第1の信号および第2の信号に変換する三相二相変換手段と、前記第1の信号に含まれる正相分の信号である第1の正相分信号と、前記第2の信号に含まれる正相分の信号である第2の正相分信号とを、それぞれ抽出する正相分抽出手段と、前記第1の信号に含まれる逆相分の信号である第1の逆相分信号と、前記第2の信号に含まれる逆相分の信号である第2の逆相分信号とを、それぞれ抽出する逆相分抽出手段と、前記正相分抽出手段によって抽出された前記第1の正相分信号および前記第2の正相分信号と、前記逆相分抽出手段によって抽出された前記第1の逆相分信号および前記第2の逆相分信号とから、不平衡率を算出する不平衡率算出手段とを備えており、前記正相分抽出手段は、前記第1の信号を第1の伝達関数によって信号処理し、前記第2の信号を第2の伝達関数によって信号処理し、これらを加算することで前記第1の正相分信号を抽出し、前記第1の信号を第3の伝達関数によって信号処理し、前記第2の信号を前記第1の伝達関数によって信号処理し、これらを加算することで前記第2の正相分信号を抽出し、前記逆相分抽出手段は、前記第1の信号を前記第1の伝達関数によって信号処理し、前記第2の信号を前記第3の伝達関数によって信号処理し、これらを加算することで前記第1の逆相分信号を抽出し、前記第1の信号を前記第2の伝達関数によって信号処理し、前記第2の信号を前記第1の伝達関数によって信号処理し、これらを加算することで前記第2の逆相分信号を抽出し、前記三相交流の基本波の角周波数をω0、時定数をTとした場合、前記第1の伝達関数は、
G1(s)=(T2・s2+T・s+T2・ω02)/{(T・s+1)2+(T・ω0)2}
であり、前記第2の伝達関数は、
G2(s)=−T・ω0/{(T・s+1)2+(T・ω0)2}
であり、前記第3の伝達関数は、
G3(s)=T・ω0/{(T・s+1)2+(T・ω0)2}
であることを特徴とする。
【0016】
本発明の好ましい実施の形態においては、前記不平衡率算出手段は、前記第1の正相分信号をXα、前記第2の正相分信号をXβ、前記第1の逆相分信号をYα、前記第2の逆相分信号をYβとすると、下記式を用いて不平衡率kを算出する。
【数3】
【0017】
本発明の好ましい実施の形態においては、前記不平衡率算出手段によって算出された不平衡率を表示するための表示手段をさらに備えている。
【0018】
本発明の好ましい実施の形態においては、前記3つの信号は、三相交流の各相電圧を検出した相電圧信号である。
【0019】
本発明の好ましい実施の形態においては、前記3つの信号は、三相交流の各線間電圧を検出した線間電圧信号である。
【0020】
本発明の第3の側面によって提供される不平衡率検出方法は、三相交流に基づく3つの信号を第1の信号および第2の信号に変換する第1の工程と、前記第1の信号を第1の伝達関数によって信号処理し、前記第2の信号を第2の伝達関数によって信号処理し、これらを加算することで第1の正相分信号を抽出する第2の工程と、前記第1の信号を第3の伝達関数によって信号処理し、前記第2の信号を前記第1の伝達関数によって信号処理し、これらを加算することで第2の正相分信号を抽出する第3の工程と、前記第1の信号を前記第1の伝達関数によって信号処理し、前記第2の信号を前記第3の伝達関数によって信号処理し、これらを加算することで第1の逆相分信号を抽出する第4の工程と、前記第1の信号を前記第2の伝達関数によって信号処理し、前記第2の信号を前記第1の伝達関数によって信号処理し、これらを加算することで第2の逆相分信号を抽出する第5の工程と、前記第2の工程によって抽出された前記第1の正相分信号と、前記第3の工程によって抽出された前記第2の正相分信号と、前記第4の工程によって抽出された前記第1の逆相分信号と、前記第5の工程によって抽出された前記第2の逆相分信号とから、不平衡率を算出する第6の工程とを備えており、前記三相交流の基本波の角周波数をω0、時定数をTとした場合、前記第1の伝達関数は、
G1(s)=(T・s+1)/{(T・s+1)2+(T・ω0)2}
であり、前記第2の伝達関数は、
G2(s)=−T・ω0/{(T・s+1)2+(T・ω0)2}
であり、前記第3の伝達関数は、
G3(s)=T・ω0/{(T・s+1)2+(T・ω0)2}
であることを特徴とする。
【発明の効果】
【0021】
本発明によれば、正相分の信号と逆相分の信号とがそれぞれ容易に抽出され、これらの正相分の信号と逆相分の信号とから不平衡率が容易に算出される。したがって、簡単な演算処理で不平衡率を検出することができる。
【0022】
本発明のその他の特徴および利点は、添付図面を参照して以下に行う詳細な説明によって、より明らかとなろう。
【図面の簡単な説明】
【0023】
【図1】第1実施形態に係る不平衡率検出装置を説明するためのブロック図である。
【図2】回転座標変換および静止座標変換を伴う処理を線形時不変の処理に変換する方法について説明するためのブロック線図である。
【図3】回転座標変換および静止座標変換を伴う処理を線形時不変の処理に変換する方法について説明するためのブロック線図であり、行列で表したものである。
【図4】行列の計算を説明するためのブロック線図である。
【図5】回転座標変換を行ってからローパスフィルタ処理を行った後に静止座標変換を行う処理を示すブロック線図である。
【図6】行列GLPFの各要素である伝達関数を解析するためのボード線図である。
【図7】正相分の信号と逆相分の信号を説明するための図である。
【図8】回転座標変換を行ってからハイパスフィルタ処理を行った後に静止座標変換を行う処理を示すブロック線図である。
【図9】行列GHPFの各要素である伝達関数を解析するためのボード線図である。
【図10】従来の一般的な不平衡率検出装置を説明するためのブロック図である。
【発明を実施するための形態】
【0024】
以下、本発明の実施の形態を、図面を参照して具体的に説明する。
【0025】
図1は、第1実施形態に係る不平衡率検出装置を説明するためのブロック図である。
【0026】
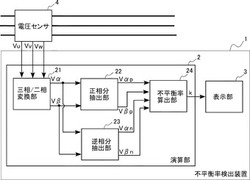
不平衡率検出装置1は、三相電力系統の三相交流電圧の不平衡率を検出するものである。電圧センサ4は、三相電力系統の各相電圧を検出するものであり、U相の相電圧を検出した相電圧信号Vu、V相の相電圧を検出した相電圧信号Vv、W相の相電圧を検出した相電圧信号Vwを不平衡率検出装置1に出力する。不平衡率検出装置1は、電圧センサ4より入力される相電圧信号Vu,Vv,Vwに基づいて不平衡率を検出する。
【0027】
不平衡率検出装置1は、演算部2および表示部3を備えている。演算部2は、不平衡率を演算するものであり、例えばマイクロコンピュータなどによって実現されている。演算部2は、演算結果である不平衡率kを表示部3に出力する。表示部3は、演算結果を表示するものであり、モニタなどの表示手段によって実現されている。表示部3は、演算部2より入力された不平衡率kを表示する。演算部2は、三相/二相変換部21、正相分抽出部22、逆相分抽出部23、および不平衡率算出部24を備えている。
【0028】
三相/二相変換部21は、電圧センサ4より入力される3つの相電圧信号Vu,Vv,Vwを、α軸電圧信号Vαおよびβ軸電圧信号Vβに変換するものである。三相/二相変換部21は、いわゆる三相/二相変換処理(αβ変換処理)を行うものであり、相電圧信号Vu,Vv,Vwを互いに直交するα軸成分とβ軸成分とにそれぞれ分解して、各軸成分をまとめることでα軸電圧信号Vαおよびβ軸電圧信号Vβを生成する。
【0029】
三相/二相変換部21で行われる変換処理は、下記(5)式に示す行列式で表される。
【数4】
【0030】
正相分抽出部22および逆相分抽出部23は、三相/二相変換部21より入力されるα軸電圧信号Vαおよびβ軸電圧信号Vβから、基本波の正相分信号および逆相分信号を抽出するものである。正相分抽出部22および逆相分抽出部23は、本出願の発明者らが開発した、回転座標変換処理(dq変換処理)を改良した線形時不変の処理(以下では、「DQ−LTI変換処理」とする。)を利用したローパスフィルタを用いている。
【0031】
DQ−LTI変換処理は、回転座標変換(dq変換)を行ってから所定の処理を行った後に静止座標変換(逆dq変換)を行うのと等価の処理を行うことができ、かつ、線形性および時不変性を有する信号処理である。回転座標変換および静止座標変換は非線形時変の処理なので、これらを用いた制御系の設計に線形制御理論を用いることができないし、システム解析もできない。DQ−LTI変換処理は、この問題を解消するために開発されたものであり、回転座標変換を行ってから所定の処理を行った後に静止座標変換を行うのと等価の処理を、伝達関数の行列を用いた演算処理としたものである。
【0032】
まず、回転座標変換および静止座標変換を伴う処理を線形時不変の処理に変換する方法について説明する。
【0033】
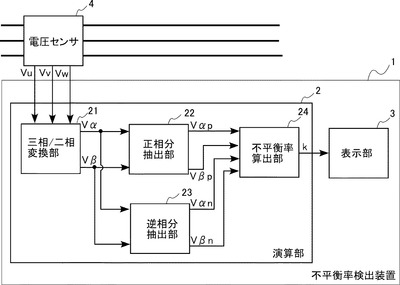
図2(a)は、回転座標変換および静止座標変換を伴う処理を説明するための図である。当該処理では、まず、信号αおよびβが、回転座標変換によって、信号dおよびqに変換される。信号dおよびqに対して、それぞれ所定の伝達関数F(s)で表される処理が行われ、信号d’およびq’が出力される。次に、信号d’およびq’が静止座標変換によって、信号α’およびβ’に変換される。図2(a)に示す非線形時変の処理を、図2(b)に示す線形時不変の伝達関数の行列Gを用いた処理に変換する。
【0034】
図2(a)に示す回転座標変換は下記(6)式の行列式で表され、静止座標変換は下記(7)式の行列式で表される。
【数5】
【0035】
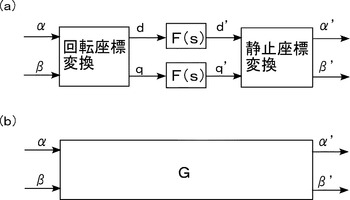
したがって、図2(a)に示す処理を、行列を用いて、図3(a)のように表すことができる。図3(a)に示す3つの行列の積を計算し、算出された行列を線形時不変の行列にすることで、図2(b)に示す行列Gを算出することができる。このとき、静止座標変換および回転座標変換の行列を行列の積に変換したうえで、算出を行う。
【0036】
回転座標変換の行列は、下記(8)式に示す右辺の行列の積に変換することができる。
【数6】
但し、jは虚数単位であり、exp()は自然対数の底eの指数関数であり、
【数7】
である。なお、T-1は、Tの逆行列である。
【0037】
【数8】
となり、オイラーの公式より、exp(jθ)=cosθ+jsinθ、exp(−jθ)=cosθ−jsinθを代入して計算すると、
【数9】
であることが、確認できる。
【0038】
また、静止座標変換の行列は、下記(9)式に示す右辺の行列の積に変換することができる。当該行列の積の中央の行列は線形時不変の行列である。
【数10】
但し、jは虚数単位であり、exp()は自然対数の底eの指数関数であり、
【数11】
である。なお、T-1は、Tの逆行列である。
【0039】
【数12】
となり、オイラーの公式より、exp(jθ)=cosθ+jsinθ、exp(−jθ)=cosθ−jsinθを代入して計算すると、
【数13】
であることが、確認できる。
【0040】
上記(8)式および(9)式を用いて、図3(a)に示す3つの行列の積を計算して、行列Gを算出すると、下記(10)式のように計算される。
【数14】
【0041】
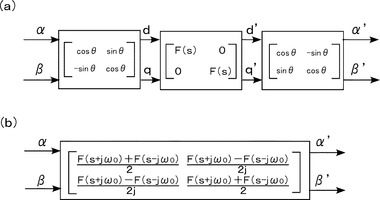
上記(10)式の中央の3つの行列の1行1列目の要素に注目し、これをブロック線図で表すと、図4に示すブロック線図になる。図4に示すブロック線図の入出力特性を計算すると、
【数15】
となる。ただし、F(s)はインパルス応答f(t)をもつ一入力一出力伝達関数である。
【0042】
ここで、θ(t)=ω0tとすると、θ(t)−θ(τ)=ω0t−ω0τ=ω0(t−τ)=θ(t−τ)となるので、図4に示すブロック線図の入出力特性は、インパルス応答f(t)exp(−jω0t)を持つ線形時不変系のものに等しい。インパルス応答f(t)exp(−jω0t)をラプラス変換すると、伝達関数F(s+jω0)が得られる。また、図4に示すブロック線図のexp(jθ(t))とexp(−jθ(t))とを入れ換えた場合の入出力特性は、伝達関数F(s−jω0)の入出力特性になる。
【0043】
したがって、上記(10)式からさらに計算を進めると、
【数16】
と計算される。
【0044】
これにより、図3(a)に示す処理を、図3(b)に示す処理に変換することができる。図3(b)に示す処理は、回転座標変換を行ってから所定の伝達関数F(s)で表される処理を行った後に静止座標変換を行う処理と等価の処理であって、当該処理のシステムは線形時不変のシステムである。
【0045】
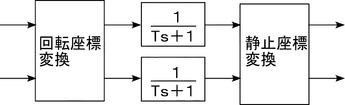
ローパスフィルタの伝達関数は、時定数をTとすると、F(s)=1/(Ts+1)で表される。したがって、図5に示す処理、すなわち、回転座標変換を行ってからローパスフィルタ処理を行った後に静止座標変換を行う処理と等価の処理を示す伝達関数の行列GLPFは、上記(11)式を用いて、下記(12)式のように算出される。
【数17】
【0046】
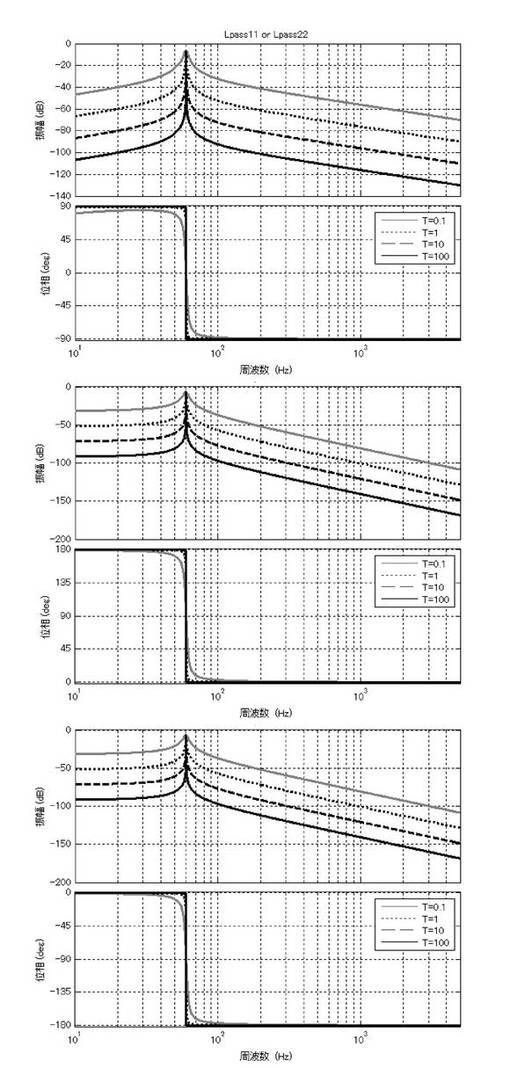
図6は、行列GLPFの各要素である伝達関数を解析するためのボード線図である。同図(a)は行列GLPFの1行1列要素(以下では、「(1,1)要素」と記載する。他の要素についても同様に記載する。)および(2,2)要素の伝達関数を示しており、同図(b)は行列GLPFの(1,2)要素の伝達関数を示しており、同図(c)は行列GLPFの(2,1)要素の伝達関数を示している。同図は、系統電圧の基本波の周波数(以下では、「中心周波数」とする。また、中心周波数に対応する角周波数を「中心角周波数」とする。)が60Hzの場合(すなわち、角周波数ω0=120πの場合)のものであり、時定数Tを「0.1」,「1」,「10」,「100」とした場合を示している。
【0047】
同図(a),(b)および(c)が示す振幅特性は、いずれも、中心周波数にピークがあり、振幅特性のピークは−6dB(=1/2)である。また、時定数Tが大きくなると、通過帯域が小さくなっている。同図(a)が示す位相特性は、中心周波数で0度になる。つまり、行列GLPFの(1,1)要素および(2,2)要素の伝達関数は、中心周波数(中心角周波数)の信号を位相を変化させることなく通過させる。同図(b)が示す位相特性は、中心周波数で90度になる。つまり、行列GLPFの(1,2)要素の伝達関数は、中心周波数(中心角周波数)の信号の位相を90度進めて通過させる。一方、同図(c)が示す位相特性は、中心周波数で−90度になる。つまり、行列GLPFの(2,1)要素の伝達関数は、中心周波数(中心角周波数)の信号の位相を90度遅らせて通過させる。以下に、三相/二相変換後の2つの信号に対する伝達関数の行列GLPFに示す処理を、図7を参照して検討する。
【0048】
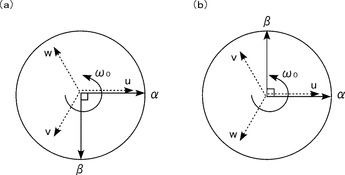
図7は、正相分の信号と逆相分の信号を説明するための図である。同図(a)は正相分の信号を示しており、同図(b)は逆相分の信号を示している。
【0049】
同図(a)において、相電圧信号Vu,Vv,Vwの基本波の正相分信号を破線矢印のベクトルu,v,wで示している。ベクトルu,v,wは互いに120度ずつ向きが異なっており、時計回りの順番で並んで角周波数ω0で反時計回りの方向に回転している。前記正相分信号を三相/二相変換したα軸信号およびβ軸信号は、実線矢印のベクトルα,βで示される。ベクトルα,βは、時計回りの順番で90度向きが異なっており、角周波数ω0で反時計回りの方向に回転している。
【0050】
つまり、α軸信号はβ軸信号より90度位相が進んでいる。α軸信号に行列GLPFの(1,1)要素の伝達関数に示す処理を行った場合、振幅が半分になって、位相は変化しない(図6(a)参照)。また、β軸信号に行列GLPFの(1,2)要素の伝達関数に示す処理を行った場合、振幅が半分になって、位相が90度進む(図6(b)参照)。したがって、両者の位相がα軸信号と同じ位相になるので、両者を加算することでα軸信号が再現される。一方、α軸信号に行列GLPFの(2,1)要素の伝達関数に示す処理を行った場合、振幅が半分になって、位相が90度遅れる(図6(c)参照)。また、β軸信号に行列GLPFの(2,2)要素の伝達関数に示す処理を行った場合、振幅が半分になって、位相は変化しない。したがって、両者の位相がβ軸信号と同じ位相になるので、両者を加算することでβ軸信号が再現される。
【0051】
逆相分は相順が正相分とは逆方向になっている成分である。図7(b)において、相電圧信号Vu,Vv,Vwの基本波の逆相分信号を破線矢印のベクトルu,v,wで示している。ベクトルu,v,wは互いに120度ずつ向きが異なっており、反時計回りの順番で並んで角周波数ω0で反時計回りの方向に回転している。前記逆相分信号を三相/二相変換したα軸信号およびβ軸信号は、実線矢印のベクトルα,βで示される。ベクトルα,βは、反時計回りの順番で90度向きが異なっており、角周波数ω0で反時計回りの方向に回転している。
【0052】
つまり、α軸信号はβ軸信号より90度位相が遅れている。α軸信号に行列GLPFの(1,1)要素の伝達関数に示す処理を行った場合、振幅が半分になって、位相は変化しない。また、β軸信号に行列GLPFの(1,2)要素の伝達関数に示す処理を行った場合、振幅が半分になって、位相が90度進む。したがって、両者の位相が逆位相になるので、両者を加算することで打ち消し合うことになる。一方、α軸信号にGLPFの(2,1)要素の伝達関数に示す処理を行った場合、振幅が半分になって、位相が90度遅れる。また、β軸信号に行列GLPFの(2,2)要素の伝達関数に示す処理を行った場合、振幅が半分になって、位相は変化しない。したがって、両者の位相が逆位相になるので、両者を加算することで打ち消し合うことになる。つまり、伝達関数の行列GLPFは、基本波の正相分信号を通過させ、逆相分信号を遮断する。また、基本波以外の周波数の信号(高調波など)は基本波より減衰されるので、伝達関数の行列GLPFに示す処理は、中心周波数の正相分信号を抽出するフィルタ処理であることが確認できる。
【0053】
伝達関数の行列GLPFの(1,2)要素と(2,1)要素とを入れ換えた場合、上記とは逆に、正相分信号を遮断し、逆相分信号を通過させる。したがって、中心周波数の逆相分信号を抽出する場合には、伝達関数の行列GLPFの(1,2)要素と(2,1)要素とを入れ換えた行列を用いればよい。
【0054】
正相分抽出部22は、三相/二相変換部21より入力されるα軸電圧信号Vαおよびβ軸電圧信号Vβから、基本波の正相分信号を抽出するものである。抽出された正相分信号Yαp,Yβpは、不平衡率算出部24に出力される。正相分抽出部22は、上記(12)式に示す、基本波の正相分信号を抽出するための伝達関数の行列GLPFに表される処理を行う。つまり、下記(13)式に示す処理を行っている。角周波数ω0は系統電圧の基本波の角周波数(例えば、ω0=120π[rad/sec](60[Hz]))があらかじめ設定されており、時定数Tはあらかじめ設計されている。
【数18】
【0055】
図1に戻って、正相分抽出部22は、回転座標変換および静止座標変換を行うことなく、静止座標系でフィルタリング処理を行っている。正相分抽出部22で行われる処理は、伝達関数の行列GLPFで示されるので、線形時不変の処理である。非線形時変処理である回転座標変換処理および静止座標変換処理が含まれていない線形時不変システムになっているので、線形制御理論を用いた制御系設計やシステム解析が可能となる。また、正相分信号Vαp,Vβpは、上記(13)式によって容易に算出される。
【0056】
逆相分抽出部23は、三相/二相変換部21より入力されるα軸電圧信号Vαおよびβ軸電圧信号Vβから、基本波の逆相分信号を抽出するものである。抽出された逆相分信号Yαn,Yβnは、不平衡率算出部24に出力される。逆相分抽出部23は、上記(12)式に示す伝達関数の行列GLPFの(1,2)要素と(2,1)要素とを入れ換えた行列に表される処理を行う。つまり、基本波の逆相分信号を抽出するための処理を行っており、下記(14)式に示す処理を行っている。角周波数ω0は系統電圧の基本波の角周波数(例えば、ω0=120π[rad/sec](60[Hz]))があらかじめ設定されており、時定数Tはあらかじめ設計されている。
【数19】
【0057】
逆相分抽出部23は、回転座標変換および静止座標変換を行うことなく、静止座標系でフィルタリング処理を行っている。逆相分抽出部23で行われる処理は、伝達関数の行列GLPFの(1,2)要素と(2,1)要素とを入れ換えた行列で示されるので、線形時不変の処理である。非線形時変処理である回転座標変換処理および静止座標変換処理が含まれていない線形時不変システムになっているので、線形制御理論を用いた制御系設計やシステム解析が可能となる。また、逆相分信号Vαn,Vβnは、上記(14)式によって容易に算出される。
【0058】
不平衡率算出部24は、正相分抽出部22より入力される正相分信号Vαp,Vβpと、逆相分抽出部23より入力される逆相分信号Vαn,Vβnとから、下記(15)式を用いて、不平衡率kを算出するものである。不平衡率算出部24は、算出した不平衡率kを表示部3に出力する。
【数20】
【0059】
本実施形態において、3つの相電圧信号Vu,Vv,Vwが互いに直交するα軸電圧信号Vαおよびβ軸電圧信号Vβに変換される。α軸電圧信号Vαおよびβ軸電圧信号Vβから、正相分信号Vαp,Vβpと逆相分信号Vαn,Vβnとが、それぞれDQ−LTI変換処理を利用したローパスフィルタによって容易に抽出される。そして、抽出された正相分信号Vαp,Vβpと逆相分信号Vαn,Vβnとから、不平衡率kが容易に算出される。したがって、簡単な演算処理で不平衡率を検出することができる。
【0060】
なお、本実施形態においては、正相分信号Vαp,Vβpと逆相分信号Vαn,Vβnとから上記(15)式を用いて不平衡率kを算出する場合について説明したが、これに限られない。例えば、正相分信号Vαp,Vβpおよび逆相分信号Vαn,Vβnを、二相/三相変換処理(逆αβ変換処理)によって、それぞれ三相の正相分信号および逆相分信号に変換し、これらを用いて不平衡率kを算出するようにしてもよい。なお、この場合、上記(5)式に示す三相/二相変換処理の行列、上記(13)式に示す行列、および、二相/三相変換処理の行列の積を算出して、当該積の行列を用いて相電圧信号Vu,Vv,Vwから三相の正相分信号を直接算出するようにしてもよい。逆相分については、上記(13)式の代わりに上記(14)式を用いた積の行列を用いればよい。また、上記第1実施形態において、上記(5)式に示す演算、上記(13)または(14)式に示す演算に代えて、各行列の積を算出して、当該積の行列を用いた演算を行うようにしてもよい。
【0061】
本実施形態においては、伝達関数の行列の各要素の時定数が同一である場合について説明したが、要素毎に異なる値を用いるようにしてもよい。例えば、α軸成分の速応性を向上させたり、安定性を高めたりするなどの付加特性を与えるように設計することもできる。
【0062】
本実施形態においては、正相分抽出部22および逆相分抽出部23をそれぞれ個別に設計する場合について説明したが、これに限られない。時定数Tを共通にするようにして、正相分抽出部22および逆相分抽出部23を一度に設計するようにしてもよい。
【0063】
本実施形態においては、正相分抽出部22および逆相分抽出部23で用いられる角周波数ω0をあらかじめ設定しておく場合について説明したが、これに限られない。信号処理のサンプリング周期が固定サンプリング周期の場合、系統電圧の基本波の角周波数を周波数検出装置などで検出して、検出された角周波数を角周波数ω0として用いるようにしてもよい。
【0064】
上記第1実施形態においては、ローパスフィルタに代わる処理を行う場合について説明したが、ハイパスフィルタに代わる処理を行う構成としてもよい。以下に、ハイパスフィルタに代わる処理を行う場合を第2実施形態として説明する。
【0065】
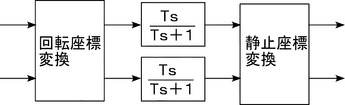
ハイパスフィルタの伝達関数は、時定数をTとすると、F(s)=Ts/(Ts+1)で表される。したがって、図8に示す処理、すなわち、回転座標変換を行ってからハイパスフィルタ処理を行った後に静止座標変換を行う処理と等価の処理を示す伝達関数の行列GHPFは、上記(11)式を用いて、下記(16)式のように算出される。
【数21】
【0066】
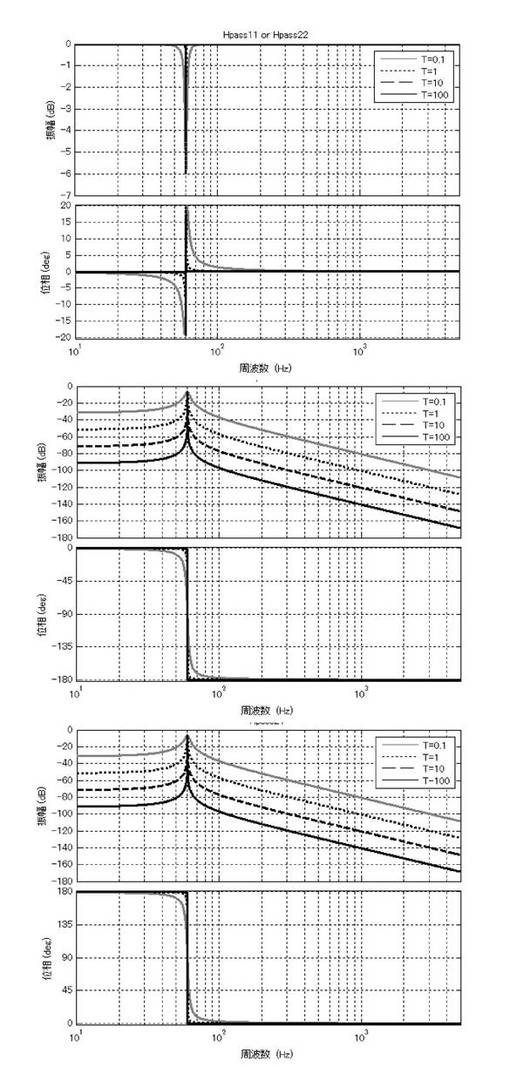
図9は、行列GHPFの各要素である伝達関数を解析するためのボード線図である。同図(a)は行列GHPFの(1,1)要素および(2,2)要素の伝達関数を示しており、同図(b)は行列GHPFの(1,2)要素の伝達関数を示しており、同図(c)は行列GHPFの(2,1)要素の伝達関数を示している。同図は、中心周波数が60Hzの場合のものであり、時定数Tを「0.1」,「1」,「10」,「100」とした場合を示している。
【0067】
同図(a)が示す振幅特性は中心周波数近辺で減衰しており、中心周波数での振幅特性は−6dB(=1/2)である。また、時定数Tが大きくなると、遮断帯域が小さくなっている。同図(b)および(c)が示す振幅特性は、いずれも、中心周波数にピークがあり、振幅特性のピークは−6dB(=1/2)である。また、時定数Tが大きくなると、通過帯域が小さくなっている。また、同図(a)が示す位相特性は、中心周波数で0度になる。つまり、行列GHPFの(1,1)要素および(2,2)要素の伝達関数は、中心周波数の信号を位相を変化させることなく通過させる。同図(b)が示す位相特性は、中心周波数で−90度になる。つまり、行列GHPFの(1,2)要素の伝達関数は、中心周波数の信号の位相を90度遅らせて通過させる。一方、同図(c)が示す位相特性は、中心周波数で90度になる。つまり、行列GHPFの(2,1)要素の伝達関数は、中心周波数の信号の位相を90度進めて通過させる。以下に、三相/二相変換後の2つの信号に対する伝達関数の行列GHPFに示す処理を、図7を参照して検討する。
【0068】
図7(a)において、基本波の正相分信号を三相/二相変換したα軸信号(ベクトルα)に行列GHPFの(1,1)要素の伝達関数に示す処理を行った場合、振幅が半分になって、位相は変化しない(図9(a)参照)。また、β軸信号(ベクトルβ)に行列GHPFの(1,2)要素の伝達関数に示す処理を行った場合、振幅が半分になって、位相が90度遅れる(図9(b)参照)。したがって、両者の位相が逆位相になるので、両者を加算することで打ち消し合うことになる。一方、α軸信号に行列GHPFの(2,1)要素の伝達関数に示す処理を行った場合、振幅が半分になって、位相が90度進む(図9(c)参照)。また、β軸信号に行列GHPFの(2,2)要素の伝達関数に示す処理を行った場合、振幅が半分になって、位相は変化しない。したがって、両者の位相が逆位相になるので、両者を加算することで打ち消し合うことになる。
【0069】
同図(b)において、基本波の逆相分信号を三相/二相変換したα軸信号(ベクトルα)に行列GHPFの(1,1)要素の伝達関数に示す処理を行った場合、振幅が半分になって、位相は変化しない。また、β軸信号(ベクトルβ)に行列GHPFの(1,2)要素の伝達関数に示す処理を行った場合、振幅が半分になって、位相が90度遅れる。したがって、両者の位相がα軸信号と同じ位相になるので、両者を加算することでα軸信号が再現される。一方、α軸信号に行列GHPFの(2,1)要素の伝達関数に示す処理を行った場合、振幅が半分になって、位相が90度進む(図9(c)参照)。また、β軸信号に行列GHPFの(2,2)要素の伝達関数に示す処理を行った場合、振幅が半分になって、位相は変化しない。したがって、両者の位相がβ軸信号と同じ位相になるので、両者を加算することでβ軸信号が再現される。
【0070】
つまり、伝達関数の行列GHPFは、基本波の逆相分信号を通過させ、正相分信号を遮断する。また、基本波以外の周波数の信号(高調波など)は、行列GHPFの(1,1)要素および(2,2)要素の伝達関数に示す処理を行った場合はそのまま通過し(図9(a)参照)、(1,2)要素および(2,1)要素の伝達関数に示す処理を行った場合は減衰するので(図9(b)、(c)参照)、ほぼそのまま通過する。したがって、伝達関数の行列GHPFに示す処理は、中心周波数の正相分信号だけを除去するノッチフィルタ処理であることが確認できる。
【0071】
伝達関数の行列GHPFの(1,2)要素と(2,1)要素とを入れ換えた場合、上記とは逆に、逆相分信号を遮断し、正相分信号を通過させる。したがって、中心周波数の逆相分信号だけを除去する場合には、伝達関数の行列GHPFの(1,2)要素と(2,1)要素とを入れ換えた行列を用いればよい。
【0072】
第2実施形態に係る不平衡率検出装置の内部構成を説明するためのブロック図は、図1に示す第1実施形態の不平衡率検出装置1のものと共通する。第2実施形態においては、図1に示す正相分抽出部22に代えて、ハイパスフィルタに代わる処理を行って逆相分を除去する正相分抽出部22’(図示しない)を備え、逆相分抽出部23に代えて、ハイパスフィルタに代わる処理を行って正相分を除去する逆相分抽出部23’(図示しない)を備えている。逆相分抽出部23’は、上記(16)式に示す行列GHPFを用いた下記(17)式に示す処理を行い、正相分抽出部22’は、上記(16)式に示す行列GHPFの(1,2)要素と(2,1)要素とを入れ換えた行列を用いた下記(18)式に示す処理を行う。なお、角周波数ω0は系統電圧の基本波の角周波数(例えば、ω0=120π[rad/sec](60[Hz]))があらかじめ設定されており、時定数Tはあらかじめ設計されている。この場合でも、正相分抽出部22’が基本波の正相分信号を抽出し、逆相分抽出部23’が基本波の逆相分信号を抽出することができる。
【数22】
【0073】
本実施形態においても、正相分信号Vαp,Vβpと逆相分信号Vαn,Vβnとをそれぞれ容易に抽出することができる。そして、抽出された正相分信号Vαp,Vβpと逆相分信号Vαn,Vβnとから、不平衡率kが容易に算出される。したがって、第1実施形態と同様の効果を奏することができる。
【0074】
なお、第2実施形態においても、第1実施形態の場合と同様に、伝達関数の行列の各要素の時定数に異なる値を用いるようにしてもよいし、時定数Tを共通にするようにして、正相分抽出部22’および逆相分抽出部23’を一度に設計するようにしてもよい。また、周波数検出装置などで検出した系統電圧の基本波の角周波数を角周波数ω0として用いるようにしてもよい。
【0075】
第2実施形態においては、正相分抽出部22’が基本波の逆相分の通過を抑制することで正相分を抽出し、逆相分抽出部23’が基本波(正相分)の通過を抑制することで逆相分を抽出する。したがって、α軸電圧信号Vαおよびβ軸電圧信号Vβに高調波成分が含まれていた場合、正相分抽出部22’および逆相分抽出部23’は、高調波成分も通過させてしまう。不平衡率を検出する電力系統に高調波成分が含まれている場合、基本波の正相分または逆相分をより精度よく抽出するためには、当該高調波成分の通過を抑制する構成を追加する必要がある。
【0076】
この場合、正相分抽出部22’および逆相分抽出部23’において、抑制すべき高調波成分を除去するためのハイパスフィルタに代わる処理をさらに備えるようにすればよい。例えば、5次高調波を抑制すべき場合は、上記(16)式に示す行列GHPFにおいて、ω0を「−5ω0」とした行列を用いた処理を行えばよい。正相分抽出部22’および逆相分抽出部23’は抑制する必要がある高調波成分の次数に応じて設計すればよく、7次高調波、11次高調波を抑制すべき場合は、上記(16)式に示す行列GHPFにおいて、ω0をそれぞれ「7ω0」、「−11ω0」とした行列を用いた処理を行うようにすればよい。
【0077】
上記第1または第2実施形態においては、正相分抽出部22(22’)および逆相分抽出部23(23’)がどちらもローパスフィルタに代わる処理またはハイパスフィルタに代わる処理を用いる場合について説明したが、これに限られない。例えば、正相分抽出部22がローパスフィルタに代わる処理を用いて正相分信号を通過させることで抽出し、逆相分抽出部23’がハイパスフィルタに代わる処理を用いて正相分信号の通過を抑制することで逆相分信号を抽出するようにしてもよい。また、正相分抽出部22’がハイパスフィルタに代わる処理を用いて逆相分信号の通過を抑制することで正相分信号を抽出し、逆相分抽出部23がローパスフィルタに代わる処理を用いて逆相分信号を通過させることで抽出するようにしてもよい。
【0078】
上記第1または第2実施形態においては、電圧センサ4が相電圧を検出する場合について説明したが、これに限られない。例えば、電圧センサ4が線間電圧を検出する場合でも、本発明を適用することができる。この場合、三相/二相変換部21で行われる変換処理に、上記(5)式に示す行列式に代えて、下記(19)式に示す行列式を用いるようにすればよい。また、三相/二相変換部21に、線間電圧信号を相電圧信号に変換する構成を追加して、線間電圧信号Vuv,Vvw,Vwuを相電圧信号Vu,Vv,Vwに変換してから、上記(5)式でα軸電圧信号Vαおよびβ軸電圧信号Vβに変換するようにしてもよい。
【数23】
【0079】
また、電流センサから入力される電流信号Iu,Iv,Iwに基づいて不平衡率を検出するようにしてもよい。この場合は、上記第1または第2実施形態の構成をそのまま用いることができる。
【0080】
上記第1または第2実施形態においては、算出された不平衡率kを表示部3に表示する場合について説明したが、これに限られない。例えば、不平衡率kが所定の閾値を超えた場合にブザーなどの音声で警告するようにしてもよい。
【0081】
上記第1または第2実施形態においては、本発明に係る不平衡率検出装置を単体で用いる場合について説明したが、これに限られない。例えば、不平衡率検出装置を系統連系インバータシステムに組み込んで、不平衡率kが所定の閾値を超えた場合に、インバータを停止させ、三相電力系統との接続を切り離すようにしてもよい。この場合、不平衡率kを表示する必要はないので表示部3を設けなくてもよいし、系統連系インバータシステムの表示部に表示するようにしてもよい。また、系統連系インバータシステムの電圧センサが検出した電圧信号を、三相/二相変換部21に入力するようにすればよい。
【0082】
本発明に係る不平衡率検出装置、および不平衡率検出方法は、上述した実施形態に限定されるものではない。本発明に係る不平衡率検出装置、および不平衡率検出方法の各部の具体的な構成は、種々に設計変更自在である。
【符号の説明】
【0083】
1 不平衡率検出装置
2 演算部
21 三相/二相変換部
22 正相分抽出部
23 逆相分抽出部
24 不平衡率算出部
3 表示部
4 電圧センサ
【技術分野】
【0001】
本発明は、三相交流の不平衡率を検出する不平衡率検出装置、および不平衡率検出方法に関する。
【背景技術】
【0002】
従来、三相交流の不平衡率を検出する不平衡率検出装置が開発されている。
【0003】
図10は、従来の一般的な不平衡率検出装置を説明するためのブロック図である。
【0004】
不平衡率検出装置100は、三相電力系統の三相交流電圧の不平衡率を検出するものである。なお、以下では三相電力系統の3つの相をそれぞれU相、V相およびW相とする。電圧センサ400は、三相電力系統の各線間電圧を検出するものであり、V相に対するU相の線間電圧を検出した線間電圧信号Vuv、W相に対するV相の線間電圧を検出した線間電圧信号Vvw、U相に対するW相の線間電圧を検出した線間電圧信号Vwuを不平衡率検出装置100に出力する。不平衡率検出装置100は、電圧センサ400より入力される線間電圧信号Vuv,Vvw,Vwuに基づいて不平衡率を検出する。
【0005】
不平衡率検出装置100は、演算部200および表示部300を備えている。演算部200は、不平衡率を演算するものであり、例えばマイクロコンピュータなどによって実現されている。演算部200は、演算結果である不平衡率kを表示部300に出力する。表示部300は、演算結果を表示するものであり、モニタなどの表示手段によって実現されている。表示部300は、演算部200より入力された不平衡率kを表示する。演算部200は、基準電圧算出部201、正相電圧算出部202、逆相電圧算出部203、および不平衡率算出部204を備えている。
【0006】
基準電圧算出部201は、電圧センサ400より入力される線間電圧信号Vuv,Vvw,Vwuから、下記(1)式により、基準電圧Vsを算出するものである。基準電圧算出部201は、算出した基準電圧Vsを正相電圧算出部202および逆相電圧算出部203に出力する。
Vs = (Vuv+Vvw+Vwu)/2 ・・・・・(1)
【0007】
正相電圧算出部202は、線間電圧信号Vuv,Vvw,Vwuと、基準電圧算出部201より入力される基準電圧Vsとから、下記(2)式により、正相電圧Vpを算出するものである。正相電圧算出部202は、算出した正相電圧Vpを不平衡率算出部204に出力する。
【数1】
【0008】
逆相電圧算出部203は、線間電圧信号Vuv,Vvw,Vwuと、基準電圧算出部201より入力される基準電圧Vsとから、下記(3)式により、逆相電圧Vnを算出するものである。逆相電圧算出部203は、算出した逆相電圧Vnを不平衡率算出部204に出力する。
【数2】
【0009】
不平衡率算出部204は、正相電圧算出部202より入力される正相電圧Vpと逆相電圧算出部203より入力される逆相電圧Vnとから、下記(4)式により、不平衡率kを算出するものである。不平衡率算出部204は、算出した不平衡率kを表示部300に出力する。
k = (Vn/Vp)×100 [%] ・・・・・(4)
【先行技術文献】
【特許文献】
【0010】
【特許文献1】特開平10−232254号公報
【発明の概要】
【発明が解決しようとする課題】
【0011】
しかしながら、不平衡率検出装置100の場合、演算部200で行われる演算処理が複雑になるという問題があった。
【0012】
本発明は上記した事情のもとで考え出されたものであって、より簡単な演算処理で不平衡率を検出することができる不平衡率検出装置を提供することをその目的としている。
【課題を解決するための手段】
【0013】
上記課題を解決するため、本発明では、次の技術的手段を講じている。
【0014】
本発明の第1の側面によって提供される不平衡率検出装置は、三相交流に基づく3つの信号を第1の信号および第2の信号に変換する三相二相変換手段と、前記第1の信号に含まれる正相分の信号である第1の正相分信号と、前記第2の信号に含まれる正相分の信号である第2の正相分信号とを、それぞれ抽出する正相分抽出手段と、前記第1の信号に含まれる逆相分の信号である第1の逆相分信号と、前記第2の信号に含まれる逆相分の信号である第2の逆相分信号とを、それぞれ抽出する逆相分抽出手段と、前記正相分抽出手段によって抽出された前記第1の正相分信号および前記第2の正相分信号と、前記逆相分抽出手段によって抽出された前記第1の逆相分信号および前記第2の逆相分信号とから、不平衡率を算出する不平衡率算出手段とを備えており、前記正相分抽出手段は、前記第1の信号を第1の伝達関数によって信号処理し、前記第2の信号を第2の伝達関数によって信号処理し、これらを加算することで前記第1の正相分信号を抽出し、前記第1の信号を第3の伝達関数によって信号処理し、前記第2の信号を前記第1の伝達関数によって信号処理し、これらを加算することで前記第2の正相分信号を抽出し、前記逆相分抽出手段は、前記第1の信号を前記第1の伝達関数によって信号処理し、前記第2の信号を前記第3の伝達関数によって信号処理し、これらを加算することで前記第1の逆相分信号を抽出し、前記第1の信号を前記第2の伝達関数によって信号処理し、前記第2の信号を前記第1の伝達関数によって信号処理し、これらを加算することで前記第2の逆相分信号を抽出し、前記三相交流の基本波の角周波数をω0、時定数をTとした場合、前記第1の伝達関数は、
G1(s)=(T・s+1)/{(T・s+1)2+(T・ω0)2}
であり、前記第2の伝達関数は、
G2(s)=−T・ω0/{(T・s+1)2+(T・ω0)2}
であり、前記第3の伝達関数は、
G3(s)=T・ω0/{(T・s+1)2+(T・ω0)2}
であることを特徴とする。なお、「正相分の信号」とは、三相交流の基本波と周波数が同じで相順が同じ信号であり、「逆相分の信号」とは、三相交流の基本波と周波数が同じで相順が逆の信号である。
【0015】
本発明の第1の側面によって提供される不平衡率検出装置は、三相交流に基づく3つの信号を第1の信号および第2の信号に変換する三相二相変換手段と、前記第1の信号に含まれる正相分の信号である第1の正相分信号と、前記第2の信号に含まれる正相分の信号である第2の正相分信号とを、それぞれ抽出する正相分抽出手段と、前記第1の信号に含まれる逆相分の信号である第1の逆相分信号と、前記第2の信号に含まれる逆相分の信号である第2の逆相分信号とを、それぞれ抽出する逆相分抽出手段と、前記正相分抽出手段によって抽出された前記第1の正相分信号および前記第2の正相分信号と、前記逆相分抽出手段によって抽出された前記第1の逆相分信号および前記第2の逆相分信号とから、不平衡率を算出する不平衡率算出手段とを備えており、前記正相分抽出手段は、前記第1の信号を第1の伝達関数によって信号処理し、前記第2の信号を第2の伝達関数によって信号処理し、これらを加算することで前記第1の正相分信号を抽出し、前記第1の信号を第3の伝達関数によって信号処理し、前記第2の信号を前記第1の伝達関数によって信号処理し、これらを加算することで前記第2の正相分信号を抽出し、前記逆相分抽出手段は、前記第1の信号を前記第1の伝達関数によって信号処理し、前記第2の信号を前記第3の伝達関数によって信号処理し、これらを加算することで前記第1の逆相分信号を抽出し、前記第1の信号を前記第2の伝達関数によって信号処理し、前記第2の信号を前記第1の伝達関数によって信号処理し、これらを加算することで前記第2の逆相分信号を抽出し、前記三相交流の基本波の角周波数をω0、時定数をTとした場合、前記第1の伝達関数は、
G1(s)=(T2・s2+T・s+T2・ω02)/{(T・s+1)2+(T・ω0)2}
であり、前記第2の伝達関数は、
G2(s)=−T・ω0/{(T・s+1)2+(T・ω0)2}
であり、前記第3の伝達関数は、
G3(s)=T・ω0/{(T・s+1)2+(T・ω0)2}
であることを特徴とする。
【0016】
本発明の好ましい実施の形態においては、前記不平衡率算出手段は、前記第1の正相分信号をXα、前記第2の正相分信号をXβ、前記第1の逆相分信号をYα、前記第2の逆相分信号をYβとすると、下記式を用いて不平衡率kを算出する。
【数3】
【0017】
本発明の好ましい実施の形態においては、前記不平衡率算出手段によって算出された不平衡率を表示するための表示手段をさらに備えている。
【0018】
本発明の好ましい実施の形態においては、前記3つの信号は、三相交流の各相電圧を検出した相電圧信号である。
【0019】
本発明の好ましい実施の形態においては、前記3つの信号は、三相交流の各線間電圧を検出した線間電圧信号である。
【0020】
本発明の第3の側面によって提供される不平衡率検出方法は、三相交流に基づく3つの信号を第1の信号および第2の信号に変換する第1の工程と、前記第1の信号を第1の伝達関数によって信号処理し、前記第2の信号を第2の伝達関数によって信号処理し、これらを加算することで第1の正相分信号を抽出する第2の工程と、前記第1の信号を第3の伝達関数によって信号処理し、前記第2の信号を前記第1の伝達関数によって信号処理し、これらを加算することで第2の正相分信号を抽出する第3の工程と、前記第1の信号を前記第1の伝達関数によって信号処理し、前記第2の信号を前記第3の伝達関数によって信号処理し、これらを加算することで第1の逆相分信号を抽出する第4の工程と、前記第1の信号を前記第2の伝達関数によって信号処理し、前記第2の信号を前記第1の伝達関数によって信号処理し、これらを加算することで第2の逆相分信号を抽出する第5の工程と、前記第2の工程によって抽出された前記第1の正相分信号と、前記第3の工程によって抽出された前記第2の正相分信号と、前記第4の工程によって抽出された前記第1の逆相分信号と、前記第5の工程によって抽出された前記第2の逆相分信号とから、不平衡率を算出する第6の工程とを備えており、前記三相交流の基本波の角周波数をω0、時定数をTとした場合、前記第1の伝達関数は、
G1(s)=(T・s+1)/{(T・s+1)2+(T・ω0)2}
であり、前記第2の伝達関数は、
G2(s)=−T・ω0/{(T・s+1)2+(T・ω0)2}
であり、前記第3の伝達関数は、
G3(s)=T・ω0/{(T・s+1)2+(T・ω0)2}
であることを特徴とする。
【発明の効果】
【0021】
本発明によれば、正相分の信号と逆相分の信号とがそれぞれ容易に抽出され、これらの正相分の信号と逆相分の信号とから不平衡率が容易に算出される。したがって、簡単な演算処理で不平衡率を検出することができる。
【0022】
本発明のその他の特徴および利点は、添付図面を参照して以下に行う詳細な説明によって、より明らかとなろう。
【図面の簡単な説明】
【0023】
【図1】第1実施形態に係る不平衡率検出装置を説明するためのブロック図である。
【図2】回転座標変換および静止座標変換を伴う処理を線形時不変の処理に変換する方法について説明するためのブロック線図である。
【図3】回転座標変換および静止座標変換を伴う処理を線形時不変の処理に変換する方法について説明するためのブロック線図であり、行列で表したものである。
【図4】行列の計算を説明するためのブロック線図である。
【図5】回転座標変換を行ってからローパスフィルタ処理を行った後に静止座標変換を行う処理を示すブロック線図である。
【図6】行列GLPFの各要素である伝達関数を解析するためのボード線図である。
【図7】正相分の信号と逆相分の信号を説明するための図である。
【図8】回転座標変換を行ってからハイパスフィルタ処理を行った後に静止座標変換を行う処理を示すブロック線図である。
【図9】行列GHPFの各要素である伝達関数を解析するためのボード線図である。
【図10】従来の一般的な不平衡率検出装置を説明するためのブロック図である。
【発明を実施するための形態】
【0024】
以下、本発明の実施の形態を、図面を参照して具体的に説明する。
【0025】
図1は、第1実施形態に係る不平衡率検出装置を説明するためのブロック図である。
【0026】
不平衡率検出装置1は、三相電力系統の三相交流電圧の不平衡率を検出するものである。電圧センサ4は、三相電力系統の各相電圧を検出するものであり、U相の相電圧を検出した相電圧信号Vu、V相の相電圧を検出した相電圧信号Vv、W相の相電圧を検出した相電圧信号Vwを不平衡率検出装置1に出力する。不平衡率検出装置1は、電圧センサ4より入力される相電圧信号Vu,Vv,Vwに基づいて不平衡率を検出する。
【0027】
不平衡率検出装置1は、演算部2および表示部3を備えている。演算部2は、不平衡率を演算するものであり、例えばマイクロコンピュータなどによって実現されている。演算部2は、演算結果である不平衡率kを表示部3に出力する。表示部3は、演算結果を表示するものであり、モニタなどの表示手段によって実現されている。表示部3は、演算部2より入力された不平衡率kを表示する。演算部2は、三相/二相変換部21、正相分抽出部22、逆相分抽出部23、および不平衡率算出部24を備えている。
【0028】
三相/二相変換部21は、電圧センサ4より入力される3つの相電圧信号Vu,Vv,Vwを、α軸電圧信号Vαおよびβ軸電圧信号Vβに変換するものである。三相/二相変換部21は、いわゆる三相/二相変換処理(αβ変換処理)を行うものであり、相電圧信号Vu,Vv,Vwを互いに直交するα軸成分とβ軸成分とにそれぞれ分解して、各軸成分をまとめることでα軸電圧信号Vαおよびβ軸電圧信号Vβを生成する。
【0029】
三相/二相変換部21で行われる変換処理は、下記(5)式に示す行列式で表される。
【数4】
【0030】
正相分抽出部22および逆相分抽出部23は、三相/二相変換部21より入力されるα軸電圧信号Vαおよびβ軸電圧信号Vβから、基本波の正相分信号および逆相分信号を抽出するものである。正相分抽出部22および逆相分抽出部23は、本出願の発明者らが開発した、回転座標変換処理(dq変換処理)を改良した線形時不変の処理(以下では、「DQ−LTI変換処理」とする。)を利用したローパスフィルタを用いている。
【0031】
DQ−LTI変換処理は、回転座標変換(dq変換)を行ってから所定の処理を行った後に静止座標変換(逆dq変換)を行うのと等価の処理を行うことができ、かつ、線形性および時不変性を有する信号処理である。回転座標変換および静止座標変換は非線形時変の処理なので、これらを用いた制御系の設計に線形制御理論を用いることができないし、システム解析もできない。DQ−LTI変換処理は、この問題を解消するために開発されたものであり、回転座標変換を行ってから所定の処理を行った後に静止座標変換を行うのと等価の処理を、伝達関数の行列を用いた演算処理としたものである。
【0032】
まず、回転座標変換および静止座標変換を伴う処理を線形時不変の処理に変換する方法について説明する。
【0033】
図2(a)は、回転座標変換および静止座標変換を伴う処理を説明するための図である。当該処理では、まず、信号αおよびβが、回転座標変換によって、信号dおよびqに変換される。信号dおよびqに対して、それぞれ所定の伝達関数F(s)で表される処理が行われ、信号d’およびq’が出力される。次に、信号d’およびq’が静止座標変換によって、信号α’およびβ’に変換される。図2(a)に示す非線形時変の処理を、図2(b)に示す線形時不変の伝達関数の行列Gを用いた処理に変換する。
【0034】
図2(a)に示す回転座標変換は下記(6)式の行列式で表され、静止座標変換は下記(7)式の行列式で表される。
【数5】
【0035】
したがって、図2(a)に示す処理を、行列を用いて、図3(a)のように表すことができる。図3(a)に示す3つの行列の積を計算し、算出された行列を線形時不変の行列にすることで、図2(b)に示す行列Gを算出することができる。このとき、静止座標変換および回転座標変換の行列を行列の積に変換したうえで、算出を行う。
【0036】
回転座標変換の行列は、下記(8)式に示す右辺の行列の積に変換することができる。
【数6】
但し、jは虚数単位であり、exp()は自然対数の底eの指数関数であり、
【数7】
である。なお、T-1は、Tの逆行列である。
【0037】
【数8】
となり、オイラーの公式より、exp(jθ)=cosθ+jsinθ、exp(−jθ)=cosθ−jsinθを代入して計算すると、
【数9】
であることが、確認できる。
【0038】
また、静止座標変換の行列は、下記(9)式に示す右辺の行列の積に変換することができる。当該行列の積の中央の行列は線形時不変の行列である。
【数10】
但し、jは虚数単位であり、exp()は自然対数の底eの指数関数であり、
【数11】
である。なお、T-1は、Tの逆行列である。
【0039】
【数12】
となり、オイラーの公式より、exp(jθ)=cosθ+jsinθ、exp(−jθ)=cosθ−jsinθを代入して計算すると、
【数13】
であることが、確認できる。
【0040】
上記(8)式および(9)式を用いて、図3(a)に示す3つの行列の積を計算して、行列Gを算出すると、下記(10)式のように計算される。
【数14】
【0041】
上記(10)式の中央の3つの行列の1行1列目の要素に注目し、これをブロック線図で表すと、図4に示すブロック線図になる。図4に示すブロック線図の入出力特性を計算すると、
【数15】
となる。ただし、F(s)はインパルス応答f(t)をもつ一入力一出力伝達関数である。
【0042】
ここで、θ(t)=ω0tとすると、θ(t)−θ(τ)=ω0t−ω0τ=ω0(t−τ)=θ(t−τ)となるので、図4に示すブロック線図の入出力特性は、インパルス応答f(t)exp(−jω0t)を持つ線形時不変系のものに等しい。インパルス応答f(t)exp(−jω0t)をラプラス変換すると、伝達関数F(s+jω0)が得られる。また、図4に示すブロック線図のexp(jθ(t))とexp(−jθ(t))とを入れ換えた場合の入出力特性は、伝達関数F(s−jω0)の入出力特性になる。
【0043】
したがって、上記(10)式からさらに計算を進めると、
【数16】
と計算される。
【0044】
これにより、図3(a)に示す処理を、図3(b)に示す処理に変換することができる。図3(b)に示す処理は、回転座標変換を行ってから所定の伝達関数F(s)で表される処理を行った後に静止座標変換を行う処理と等価の処理であって、当該処理のシステムは線形時不変のシステムである。
【0045】
ローパスフィルタの伝達関数は、時定数をTとすると、F(s)=1/(Ts+1)で表される。したがって、図5に示す処理、すなわち、回転座標変換を行ってからローパスフィルタ処理を行った後に静止座標変換を行う処理と等価の処理を示す伝達関数の行列GLPFは、上記(11)式を用いて、下記(12)式のように算出される。
【数17】
【0046】
図6は、行列GLPFの各要素である伝達関数を解析するためのボード線図である。同図(a)は行列GLPFの1行1列要素(以下では、「(1,1)要素」と記載する。他の要素についても同様に記載する。)および(2,2)要素の伝達関数を示しており、同図(b)は行列GLPFの(1,2)要素の伝達関数を示しており、同図(c)は行列GLPFの(2,1)要素の伝達関数を示している。同図は、系統電圧の基本波の周波数(以下では、「中心周波数」とする。また、中心周波数に対応する角周波数を「中心角周波数」とする。)が60Hzの場合(すなわち、角周波数ω0=120πの場合)のものであり、時定数Tを「0.1」,「1」,「10」,「100」とした場合を示している。
【0047】
同図(a),(b)および(c)が示す振幅特性は、いずれも、中心周波数にピークがあり、振幅特性のピークは−6dB(=1/2)である。また、時定数Tが大きくなると、通過帯域が小さくなっている。同図(a)が示す位相特性は、中心周波数で0度になる。つまり、行列GLPFの(1,1)要素および(2,2)要素の伝達関数は、中心周波数(中心角周波数)の信号を位相を変化させることなく通過させる。同図(b)が示す位相特性は、中心周波数で90度になる。つまり、行列GLPFの(1,2)要素の伝達関数は、中心周波数(中心角周波数)の信号の位相を90度進めて通過させる。一方、同図(c)が示す位相特性は、中心周波数で−90度になる。つまり、行列GLPFの(2,1)要素の伝達関数は、中心周波数(中心角周波数)の信号の位相を90度遅らせて通過させる。以下に、三相/二相変換後の2つの信号に対する伝達関数の行列GLPFに示す処理を、図7を参照して検討する。
【0048】
図7は、正相分の信号と逆相分の信号を説明するための図である。同図(a)は正相分の信号を示しており、同図(b)は逆相分の信号を示している。
【0049】
同図(a)において、相電圧信号Vu,Vv,Vwの基本波の正相分信号を破線矢印のベクトルu,v,wで示している。ベクトルu,v,wは互いに120度ずつ向きが異なっており、時計回りの順番で並んで角周波数ω0で反時計回りの方向に回転している。前記正相分信号を三相/二相変換したα軸信号およびβ軸信号は、実線矢印のベクトルα,βで示される。ベクトルα,βは、時計回りの順番で90度向きが異なっており、角周波数ω0で反時計回りの方向に回転している。
【0050】
つまり、α軸信号はβ軸信号より90度位相が進んでいる。α軸信号に行列GLPFの(1,1)要素の伝達関数に示す処理を行った場合、振幅が半分になって、位相は変化しない(図6(a)参照)。また、β軸信号に行列GLPFの(1,2)要素の伝達関数に示す処理を行った場合、振幅が半分になって、位相が90度進む(図6(b)参照)。したがって、両者の位相がα軸信号と同じ位相になるので、両者を加算することでα軸信号が再現される。一方、α軸信号に行列GLPFの(2,1)要素の伝達関数に示す処理を行った場合、振幅が半分になって、位相が90度遅れる(図6(c)参照)。また、β軸信号に行列GLPFの(2,2)要素の伝達関数に示す処理を行った場合、振幅が半分になって、位相は変化しない。したがって、両者の位相がβ軸信号と同じ位相になるので、両者を加算することでβ軸信号が再現される。
【0051】
逆相分は相順が正相分とは逆方向になっている成分である。図7(b)において、相電圧信号Vu,Vv,Vwの基本波の逆相分信号を破線矢印のベクトルu,v,wで示している。ベクトルu,v,wは互いに120度ずつ向きが異なっており、反時計回りの順番で並んで角周波数ω0で反時計回りの方向に回転している。前記逆相分信号を三相/二相変換したα軸信号およびβ軸信号は、実線矢印のベクトルα,βで示される。ベクトルα,βは、反時計回りの順番で90度向きが異なっており、角周波数ω0で反時計回りの方向に回転している。
【0052】
つまり、α軸信号はβ軸信号より90度位相が遅れている。α軸信号に行列GLPFの(1,1)要素の伝達関数に示す処理を行った場合、振幅が半分になって、位相は変化しない。また、β軸信号に行列GLPFの(1,2)要素の伝達関数に示す処理を行った場合、振幅が半分になって、位相が90度進む。したがって、両者の位相が逆位相になるので、両者を加算することで打ち消し合うことになる。一方、α軸信号にGLPFの(2,1)要素の伝達関数に示す処理を行った場合、振幅が半分になって、位相が90度遅れる。また、β軸信号に行列GLPFの(2,2)要素の伝達関数に示す処理を行った場合、振幅が半分になって、位相は変化しない。したがって、両者の位相が逆位相になるので、両者を加算することで打ち消し合うことになる。つまり、伝達関数の行列GLPFは、基本波の正相分信号を通過させ、逆相分信号を遮断する。また、基本波以外の周波数の信号(高調波など)は基本波より減衰されるので、伝達関数の行列GLPFに示す処理は、中心周波数の正相分信号を抽出するフィルタ処理であることが確認できる。
【0053】
伝達関数の行列GLPFの(1,2)要素と(2,1)要素とを入れ換えた場合、上記とは逆に、正相分信号を遮断し、逆相分信号を通過させる。したがって、中心周波数の逆相分信号を抽出する場合には、伝達関数の行列GLPFの(1,2)要素と(2,1)要素とを入れ換えた行列を用いればよい。
【0054】
正相分抽出部22は、三相/二相変換部21より入力されるα軸電圧信号Vαおよびβ軸電圧信号Vβから、基本波の正相分信号を抽出するものである。抽出された正相分信号Yαp,Yβpは、不平衡率算出部24に出力される。正相分抽出部22は、上記(12)式に示す、基本波の正相分信号を抽出するための伝達関数の行列GLPFに表される処理を行う。つまり、下記(13)式に示す処理を行っている。角周波数ω0は系統電圧の基本波の角周波数(例えば、ω0=120π[rad/sec](60[Hz]))があらかじめ設定されており、時定数Tはあらかじめ設計されている。
【数18】
【0055】
図1に戻って、正相分抽出部22は、回転座標変換および静止座標変換を行うことなく、静止座標系でフィルタリング処理を行っている。正相分抽出部22で行われる処理は、伝達関数の行列GLPFで示されるので、線形時不変の処理である。非線形時変処理である回転座標変換処理および静止座標変換処理が含まれていない線形時不変システムになっているので、線形制御理論を用いた制御系設計やシステム解析が可能となる。また、正相分信号Vαp,Vβpは、上記(13)式によって容易に算出される。
【0056】
逆相分抽出部23は、三相/二相変換部21より入力されるα軸電圧信号Vαおよびβ軸電圧信号Vβから、基本波の逆相分信号を抽出するものである。抽出された逆相分信号Yαn,Yβnは、不平衡率算出部24に出力される。逆相分抽出部23は、上記(12)式に示す伝達関数の行列GLPFの(1,2)要素と(2,1)要素とを入れ換えた行列に表される処理を行う。つまり、基本波の逆相分信号を抽出するための処理を行っており、下記(14)式に示す処理を行っている。角周波数ω0は系統電圧の基本波の角周波数(例えば、ω0=120π[rad/sec](60[Hz]))があらかじめ設定されており、時定数Tはあらかじめ設計されている。
【数19】
【0057】
逆相分抽出部23は、回転座標変換および静止座標変換を行うことなく、静止座標系でフィルタリング処理を行っている。逆相分抽出部23で行われる処理は、伝達関数の行列GLPFの(1,2)要素と(2,1)要素とを入れ換えた行列で示されるので、線形時不変の処理である。非線形時変処理である回転座標変換処理および静止座標変換処理が含まれていない線形時不変システムになっているので、線形制御理論を用いた制御系設計やシステム解析が可能となる。また、逆相分信号Vαn,Vβnは、上記(14)式によって容易に算出される。
【0058】
不平衡率算出部24は、正相分抽出部22より入力される正相分信号Vαp,Vβpと、逆相分抽出部23より入力される逆相分信号Vαn,Vβnとから、下記(15)式を用いて、不平衡率kを算出するものである。不平衡率算出部24は、算出した不平衡率kを表示部3に出力する。
【数20】
【0059】
本実施形態において、3つの相電圧信号Vu,Vv,Vwが互いに直交するα軸電圧信号Vαおよびβ軸電圧信号Vβに変換される。α軸電圧信号Vαおよびβ軸電圧信号Vβから、正相分信号Vαp,Vβpと逆相分信号Vαn,Vβnとが、それぞれDQ−LTI変換処理を利用したローパスフィルタによって容易に抽出される。そして、抽出された正相分信号Vαp,Vβpと逆相分信号Vαn,Vβnとから、不平衡率kが容易に算出される。したがって、簡単な演算処理で不平衡率を検出することができる。
【0060】
なお、本実施形態においては、正相分信号Vαp,Vβpと逆相分信号Vαn,Vβnとから上記(15)式を用いて不平衡率kを算出する場合について説明したが、これに限られない。例えば、正相分信号Vαp,Vβpおよび逆相分信号Vαn,Vβnを、二相/三相変換処理(逆αβ変換処理)によって、それぞれ三相の正相分信号および逆相分信号に変換し、これらを用いて不平衡率kを算出するようにしてもよい。なお、この場合、上記(5)式に示す三相/二相変換処理の行列、上記(13)式に示す行列、および、二相/三相変換処理の行列の積を算出して、当該積の行列を用いて相電圧信号Vu,Vv,Vwから三相の正相分信号を直接算出するようにしてもよい。逆相分については、上記(13)式の代わりに上記(14)式を用いた積の行列を用いればよい。また、上記第1実施形態において、上記(5)式に示す演算、上記(13)または(14)式に示す演算に代えて、各行列の積を算出して、当該積の行列を用いた演算を行うようにしてもよい。
【0061】
本実施形態においては、伝達関数の行列の各要素の時定数が同一である場合について説明したが、要素毎に異なる値を用いるようにしてもよい。例えば、α軸成分の速応性を向上させたり、安定性を高めたりするなどの付加特性を与えるように設計することもできる。
【0062】
本実施形態においては、正相分抽出部22および逆相分抽出部23をそれぞれ個別に設計する場合について説明したが、これに限られない。時定数Tを共通にするようにして、正相分抽出部22および逆相分抽出部23を一度に設計するようにしてもよい。
【0063】
本実施形態においては、正相分抽出部22および逆相分抽出部23で用いられる角周波数ω0をあらかじめ設定しておく場合について説明したが、これに限られない。信号処理のサンプリング周期が固定サンプリング周期の場合、系統電圧の基本波の角周波数を周波数検出装置などで検出して、検出された角周波数を角周波数ω0として用いるようにしてもよい。
【0064】
上記第1実施形態においては、ローパスフィルタに代わる処理を行う場合について説明したが、ハイパスフィルタに代わる処理を行う構成としてもよい。以下に、ハイパスフィルタに代わる処理を行う場合を第2実施形態として説明する。
【0065】
ハイパスフィルタの伝達関数は、時定数をTとすると、F(s)=Ts/(Ts+1)で表される。したがって、図8に示す処理、すなわち、回転座標変換を行ってからハイパスフィルタ処理を行った後に静止座標変換を行う処理と等価の処理を示す伝達関数の行列GHPFは、上記(11)式を用いて、下記(16)式のように算出される。
【数21】
【0066】
図9は、行列GHPFの各要素である伝達関数を解析するためのボード線図である。同図(a)は行列GHPFの(1,1)要素および(2,2)要素の伝達関数を示しており、同図(b)は行列GHPFの(1,2)要素の伝達関数を示しており、同図(c)は行列GHPFの(2,1)要素の伝達関数を示している。同図は、中心周波数が60Hzの場合のものであり、時定数Tを「0.1」,「1」,「10」,「100」とした場合を示している。
【0067】
同図(a)が示す振幅特性は中心周波数近辺で減衰しており、中心周波数での振幅特性は−6dB(=1/2)である。また、時定数Tが大きくなると、遮断帯域が小さくなっている。同図(b)および(c)が示す振幅特性は、いずれも、中心周波数にピークがあり、振幅特性のピークは−6dB(=1/2)である。また、時定数Tが大きくなると、通過帯域が小さくなっている。また、同図(a)が示す位相特性は、中心周波数で0度になる。つまり、行列GHPFの(1,1)要素および(2,2)要素の伝達関数は、中心周波数の信号を位相を変化させることなく通過させる。同図(b)が示す位相特性は、中心周波数で−90度になる。つまり、行列GHPFの(1,2)要素の伝達関数は、中心周波数の信号の位相を90度遅らせて通過させる。一方、同図(c)が示す位相特性は、中心周波数で90度になる。つまり、行列GHPFの(2,1)要素の伝達関数は、中心周波数の信号の位相を90度進めて通過させる。以下に、三相/二相変換後の2つの信号に対する伝達関数の行列GHPFに示す処理を、図7を参照して検討する。
【0068】
図7(a)において、基本波の正相分信号を三相/二相変換したα軸信号(ベクトルα)に行列GHPFの(1,1)要素の伝達関数に示す処理を行った場合、振幅が半分になって、位相は変化しない(図9(a)参照)。また、β軸信号(ベクトルβ)に行列GHPFの(1,2)要素の伝達関数に示す処理を行った場合、振幅が半分になって、位相が90度遅れる(図9(b)参照)。したがって、両者の位相が逆位相になるので、両者を加算することで打ち消し合うことになる。一方、α軸信号に行列GHPFの(2,1)要素の伝達関数に示す処理を行った場合、振幅が半分になって、位相が90度進む(図9(c)参照)。また、β軸信号に行列GHPFの(2,2)要素の伝達関数に示す処理を行った場合、振幅が半分になって、位相は変化しない。したがって、両者の位相が逆位相になるので、両者を加算することで打ち消し合うことになる。
【0069】
同図(b)において、基本波の逆相分信号を三相/二相変換したα軸信号(ベクトルα)に行列GHPFの(1,1)要素の伝達関数に示す処理を行った場合、振幅が半分になって、位相は変化しない。また、β軸信号(ベクトルβ)に行列GHPFの(1,2)要素の伝達関数に示す処理を行った場合、振幅が半分になって、位相が90度遅れる。したがって、両者の位相がα軸信号と同じ位相になるので、両者を加算することでα軸信号が再現される。一方、α軸信号に行列GHPFの(2,1)要素の伝達関数に示す処理を行った場合、振幅が半分になって、位相が90度進む(図9(c)参照)。また、β軸信号に行列GHPFの(2,2)要素の伝達関数に示す処理を行った場合、振幅が半分になって、位相は変化しない。したがって、両者の位相がβ軸信号と同じ位相になるので、両者を加算することでβ軸信号が再現される。
【0070】
つまり、伝達関数の行列GHPFは、基本波の逆相分信号を通過させ、正相分信号を遮断する。また、基本波以外の周波数の信号(高調波など)は、行列GHPFの(1,1)要素および(2,2)要素の伝達関数に示す処理を行った場合はそのまま通過し(図9(a)参照)、(1,2)要素および(2,1)要素の伝達関数に示す処理を行った場合は減衰するので(図9(b)、(c)参照)、ほぼそのまま通過する。したがって、伝達関数の行列GHPFに示す処理は、中心周波数の正相分信号だけを除去するノッチフィルタ処理であることが確認できる。
【0071】
伝達関数の行列GHPFの(1,2)要素と(2,1)要素とを入れ換えた場合、上記とは逆に、逆相分信号を遮断し、正相分信号を通過させる。したがって、中心周波数の逆相分信号だけを除去する場合には、伝達関数の行列GHPFの(1,2)要素と(2,1)要素とを入れ換えた行列を用いればよい。
【0072】
第2実施形態に係る不平衡率検出装置の内部構成を説明するためのブロック図は、図1に示す第1実施形態の不平衡率検出装置1のものと共通する。第2実施形態においては、図1に示す正相分抽出部22に代えて、ハイパスフィルタに代わる処理を行って逆相分を除去する正相分抽出部22’(図示しない)を備え、逆相分抽出部23に代えて、ハイパスフィルタに代わる処理を行って正相分を除去する逆相分抽出部23’(図示しない)を備えている。逆相分抽出部23’は、上記(16)式に示す行列GHPFを用いた下記(17)式に示す処理を行い、正相分抽出部22’は、上記(16)式に示す行列GHPFの(1,2)要素と(2,1)要素とを入れ換えた行列を用いた下記(18)式に示す処理を行う。なお、角周波数ω0は系統電圧の基本波の角周波数(例えば、ω0=120π[rad/sec](60[Hz]))があらかじめ設定されており、時定数Tはあらかじめ設計されている。この場合でも、正相分抽出部22’が基本波の正相分信号を抽出し、逆相分抽出部23’が基本波の逆相分信号を抽出することができる。
【数22】
【0073】
本実施形態においても、正相分信号Vαp,Vβpと逆相分信号Vαn,Vβnとをそれぞれ容易に抽出することができる。そして、抽出された正相分信号Vαp,Vβpと逆相分信号Vαn,Vβnとから、不平衡率kが容易に算出される。したがって、第1実施形態と同様の効果を奏することができる。
【0074】
なお、第2実施形態においても、第1実施形態の場合と同様に、伝達関数の行列の各要素の時定数に異なる値を用いるようにしてもよいし、時定数Tを共通にするようにして、正相分抽出部22’および逆相分抽出部23’を一度に設計するようにしてもよい。また、周波数検出装置などで検出した系統電圧の基本波の角周波数を角周波数ω0として用いるようにしてもよい。
【0075】
第2実施形態においては、正相分抽出部22’が基本波の逆相分の通過を抑制することで正相分を抽出し、逆相分抽出部23’が基本波(正相分)の通過を抑制することで逆相分を抽出する。したがって、α軸電圧信号Vαおよびβ軸電圧信号Vβに高調波成分が含まれていた場合、正相分抽出部22’および逆相分抽出部23’は、高調波成分も通過させてしまう。不平衡率を検出する電力系統に高調波成分が含まれている場合、基本波の正相分または逆相分をより精度よく抽出するためには、当該高調波成分の通過を抑制する構成を追加する必要がある。
【0076】
この場合、正相分抽出部22’および逆相分抽出部23’において、抑制すべき高調波成分を除去するためのハイパスフィルタに代わる処理をさらに備えるようにすればよい。例えば、5次高調波を抑制すべき場合は、上記(16)式に示す行列GHPFにおいて、ω0を「−5ω0」とした行列を用いた処理を行えばよい。正相分抽出部22’および逆相分抽出部23’は抑制する必要がある高調波成分の次数に応じて設計すればよく、7次高調波、11次高調波を抑制すべき場合は、上記(16)式に示す行列GHPFにおいて、ω0をそれぞれ「7ω0」、「−11ω0」とした行列を用いた処理を行うようにすればよい。
【0077】
上記第1または第2実施形態においては、正相分抽出部22(22’)および逆相分抽出部23(23’)がどちらもローパスフィルタに代わる処理またはハイパスフィルタに代わる処理を用いる場合について説明したが、これに限られない。例えば、正相分抽出部22がローパスフィルタに代わる処理を用いて正相分信号を通過させることで抽出し、逆相分抽出部23’がハイパスフィルタに代わる処理を用いて正相分信号の通過を抑制することで逆相分信号を抽出するようにしてもよい。また、正相分抽出部22’がハイパスフィルタに代わる処理を用いて逆相分信号の通過を抑制することで正相分信号を抽出し、逆相分抽出部23がローパスフィルタに代わる処理を用いて逆相分信号を通過させることで抽出するようにしてもよい。
【0078】
上記第1または第2実施形態においては、電圧センサ4が相電圧を検出する場合について説明したが、これに限られない。例えば、電圧センサ4が線間電圧を検出する場合でも、本発明を適用することができる。この場合、三相/二相変換部21で行われる変換処理に、上記(5)式に示す行列式に代えて、下記(19)式に示す行列式を用いるようにすればよい。また、三相/二相変換部21に、線間電圧信号を相電圧信号に変換する構成を追加して、線間電圧信号Vuv,Vvw,Vwuを相電圧信号Vu,Vv,Vwに変換してから、上記(5)式でα軸電圧信号Vαおよびβ軸電圧信号Vβに変換するようにしてもよい。
【数23】
【0079】
また、電流センサから入力される電流信号Iu,Iv,Iwに基づいて不平衡率を検出するようにしてもよい。この場合は、上記第1または第2実施形態の構成をそのまま用いることができる。
【0080】
上記第1または第2実施形態においては、算出された不平衡率kを表示部3に表示する場合について説明したが、これに限られない。例えば、不平衡率kが所定の閾値を超えた場合にブザーなどの音声で警告するようにしてもよい。
【0081】
上記第1または第2実施形態においては、本発明に係る不平衡率検出装置を単体で用いる場合について説明したが、これに限られない。例えば、不平衡率検出装置を系統連系インバータシステムに組み込んで、不平衡率kが所定の閾値を超えた場合に、インバータを停止させ、三相電力系統との接続を切り離すようにしてもよい。この場合、不平衡率kを表示する必要はないので表示部3を設けなくてもよいし、系統連系インバータシステムの表示部に表示するようにしてもよい。また、系統連系インバータシステムの電圧センサが検出した電圧信号を、三相/二相変換部21に入力するようにすればよい。
【0082】
本発明に係る不平衡率検出装置、および不平衡率検出方法は、上述した実施形態に限定されるものではない。本発明に係る不平衡率検出装置、および不平衡率検出方法の各部の具体的な構成は、種々に設計変更自在である。
【符号の説明】
【0083】
1 不平衡率検出装置
2 演算部
21 三相/二相変換部
22 正相分抽出部
23 逆相分抽出部
24 不平衡率算出部
3 表示部
4 電圧センサ
【特許請求の範囲】
【請求項1】
三相交流に基づく3つの信号を第1の信号および第2の信号に変換する三相二相変換手段と、
前記第1の信号に含まれる正相分の信号である第1の正相分信号と、前記第2の信号に含まれる正相分の信号である第2の正相分信号とを、それぞれ抽出する正相分抽出手段と、
前記第1の信号に含まれる逆相分の信号である第1の逆相分信号と、前記第2の信号に含まれる逆相分の信号である第2の逆相分信号とを、それぞれ抽出する逆相分抽出手段と、
前記正相分抽出手段によって抽出された前記第1の正相分信号および前記第2の正相分信号と、前記逆相分抽出手段によって抽出された前記第1の逆相分信号および前記第2の逆相分信号とから、不平衡率を算出する不平衡率算出手段と、
を備えており、
前記正相分抽出手段は、
前記第1の信号を第1の伝達関数によって信号処理し、前記第2の信号を第2の伝達関数によって信号処理し、これらを加算することで前記第1の正相分信号を抽出し、
前記第1の信号を第3の伝達関数によって信号処理し、前記第2の信号を前記第1の伝達関数によって信号処理し、これらを加算することで前記第2の正相分信号を抽出し、
前記逆相分抽出手段は、
前記第1の信号を前記第1の伝達関数によって信号処理し、前記第2の信号を前記第3の伝達関数によって信号処理し、これらを加算することで前記第1の逆相分信号を抽出し、
前記第1の信号を前記第2の伝達関数によって信号処理し、前記第2の信号を前記第1の伝達関数によって信号処理し、これらを加算することで前記第2の逆相分信号を抽出し、
前記三相交流の基本波の角周波数をω0、時定数をTとした場合、
前記第1の伝達関数は、
G1(s)=(T・s+1)/{(T・s+1)2+(T・ω0)2}
であり、
前記第2の伝達関数は、
G2(s)=−T・ω0/{(T・s+1)2+(T・ω0)2}
であり、
前記第3の伝達関数は、
G3(s)=T・ω0/{(T・s+1)2+(T・ω0)2}
である、
ことを特徴とする不平衡率検出装置。
【請求項2】
三相交流に基づく3つの信号を第1の信号および第2の信号に変換する三相二相変換手段と、
前記第1の信号に含まれる正相分の信号である第1の正相分信号と、前記第2の信号に含まれる正相分の信号である第2の正相分信号とを、それぞれ抽出する正相分抽出手段と、
前記第1の信号に含まれる逆相分の信号である第1の逆相分信号と、前記第2の信号に含まれる逆相分の信号である第2の逆相分信号とを、それぞれ抽出する逆相分抽出手段と、
前記正相分抽出手段によって抽出された前記第1の正相分信号および前記第2の正相分信号と、前記逆相分抽出手段によって抽出された前記第1の逆相分信号および前記第2の逆相分信号とから、不平衡率を算出する不平衡率算出手段と、
を備えており、
前記正相分抽出手段は、
前記第1の信号を第1の伝達関数によって信号処理し、前記第2の信号を第2の伝達関数によって信号処理し、これらを加算することで前記第1の正相分信号を抽出し、
前記第1の信号を第3の伝達関数によって信号処理し、前記第2の信号を前記第1の伝達関数によって信号処理し、これらを加算することで前記第2の正相分信号を抽出し、
前記逆相分抽出手段は、
前記第1の信号を前記第1の伝達関数によって信号処理し、前記第2の信号を前記第3の伝達関数によって信号処理し、これらを加算することで前記第1の逆相分信号を抽出し、
前記第1の信号を前記第2の伝達関数によって信号処理し、前記第2の信号を前記第1の伝達関数によって信号処理し、これらを加算することで前記第2の逆相分信号を抽出し、
前記三相交流の基本波の角周波数をω0、時定数をTとした場合、
前記第1の伝達関数は、
G1(s)=(T2・s2+T・s+T2・ω02)/{(T・s+1)2+(T・ω0)2}
であり、
前記第2の伝達関数は、
G2(s)=−T・ω0/{(T・s+1)2+(T・ω0)2}
であり、
前記第3の伝達関数は、
G3(s)=T・ω0/{(T・s+1)2+(T・ω0)2}
である、
ことを特徴とする不平衡率検出装置。
【請求項3】
前記不平衡率算出手段は、前記第1の正相分信号をXα、前記第2の正相分信号をXβ、前記第1の逆相分信号をYα、前記第2の逆相分信号をYβとすると、下記式を用いて不平衡率kを算出する、
請求項1または2に記載の不平衡率検出装置。
【数1】
【請求項4】
前記不平衡率算出手段によって算出された不平衡率を表示するための表示手段をさらに備えている、請求項1ないし3のいずれかに記載の不平衡率検出装置。
【請求項5】
前記3つの信号は、三相交流の各相電圧を検出した相電圧信号である、請求項1ないし4のいずれかに記載の不平衡率検出装置。
【請求項6】
前記3つの信号は、三相交流の各線間電圧を検出した線間電圧信号である、請求項1ないし4のいずれかに記載の不平衡率検出装置。
【請求項7】
三相交流に基づく3つの信号を第1の信号および第2の信号に変換する第1の工程と、
前記第1の信号を第1の伝達関数によって信号処理し、前記第2の信号を第2の伝達関数によって信号処理し、これらを加算することで第1の正相分信号を抽出する第2の工程と、
前記第1の信号を第3の伝達関数によって信号処理し、前記第2の信号を前記第1の伝達関数によって信号処理し、これらを加算することで第2の正相分信号を抽出する第3の工程と、
前記第1の信号を前記第1の伝達関数によって信号処理し、前記第2の信号を前記第3の伝達関数によって信号処理し、これらを加算することで第1の逆相分信号を抽出する第4の工程と、
前記第1の信号を前記第2の伝達関数によって信号処理し、前記第2の信号を前記第1の伝達関数によって信号処理し、これらを加算することで第2の逆相分信号を抽出する第5の工程と、
前記第2の工程によって抽出された前記第1の正相分信号と、前記第3の工程によって抽出された前記第2の正相分信号と、前記第4の工程によって抽出された前記第1の逆相分信号と、前記第5の工程によって抽出された前記第2の逆相分信号とから、不平衡率を算出する第6の工程と、
を備えており、
前記三相交流の基本波の角周波数をω0、時定数をTとした場合、
前記第1の伝達関数は、
G1(s)=(T・s+1)/{(T・s+1)2+(T・ω0)2}
であり、
前記第2の伝達関数は、
G2(s)=−T・ω0/{(T・s+1)2+(T・ω0)2}
であり、
前記第3の伝達関数は、
G3(s)=T・ω0/{(T・s+1)2+(T・ω0)2}
である、
ことを特徴とする不平衡率検出方法。
【請求項1】
三相交流に基づく3つの信号を第1の信号および第2の信号に変換する三相二相変換手段と、
前記第1の信号に含まれる正相分の信号である第1の正相分信号と、前記第2の信号に含まれる正相分の信号である第2の正相分信号とを、それぞれ抽出する正相分抽出手段と、
前記第1の信号に含まれる逆相分の信号である第1の逆相分信号と、前記第2の信号に含まれる逆相分の信号である第2の逆相分信号とを、それぞれ抽出する逆相分抽出手段と、
前記正相分抽出手段によって抽出された前記第1の正相分信号および前記第2の正相分信号と、前記逆相分抽出手段によって抽出された前記第1の逆相分信号および前記第2の逆相分信号とから、不平衡率を算出する不平衡率算出手段と、
を備えており、
前記正相分抽出手段は、
前記第1の信号を第1の伝達関数によって信号処理し、前記第2の信号を第2の伝達関数によって信号処理し、これらを加算することで前記第1の正相分信号を抽出し、
前記第1の信号を第3の伝達関数によって信号処理し、前記第2の信号を前記第1の伝達関数によって信号処理し、これらを加算することで前記第2の正相分信号を抽出し、
前記逆相分抽出手段は、
前記第1の信号を前記第1の伝達関数によって信号処理し、前記第2の信号を前記第3の伝達関数によって信号処理し、これらを加算することで前記第1の逆相分信号を抽出し、
前記第1の信号を前記第2の伝達関数によって信号処理し、前記第2の信号を前記第1の伝達関数によって信号処理し、これらを加算することで前記第2の逆相分信号を抽出し、
前記三相交流の基本波の角周波数をω0、時定数をTとした場合、
前記第1の伝達関数は、
G1(s)=(T・s+1)/{(T・s+1)2+(T・ω0)2}
であり、
前記第2の伝達関数は、
G2(s)=−T・ω0/{(T・s+1)2+(T・ω0)2}
であり、
前記第3の伝達関数は、
G3(s)=T・ω0/{(T・s+1)2+(T・ω0)2}
である、
ことを特徴とする不平衡率検出装置。
【請求項2】
三相交流に基づく3つの信号を第1の信号および第2の信号に変換する三相二相変換手段と、
前記第1の信号に含まれる正相分の信号である第1の正相分信号と、前記第2の信号に含まれる正相分の信号である第2の正相分信号とを、それぞれ抽出する正相分抽出手段と、
前記第1の信号に含まれる逆相分の信号である第1の逆相分信号と、前記第2の信号に含まれる逆相分の信号である第2の逆相分信号とを、それぞれ抽出する逆相分抽出手段と、
前記正相分抽出手段によって抽出された前記第1の正相分信号および前記第2の正相分信号と、前記逆相分抽出手段によって抽出された前記第1の逆相分信号および前記第2の逆相分信号とから、不平衡率を算出する不平衡率算出手段と、
を備えており、
前記正相分抽出手段は、
前記第1の信号を第1の伝達関数によって信号処理し、前記第2の信号を第2の伝達関数によって信号処理し、これらを加算することで前記第1の正相分信号を抽出し、
前記第1の信号を第3の伝達関数によって信号処理し、前記第2の信号を前記第1の伝達関数によって信号処理し、これらを加算することで前記第2の正相分信号を抽出し、
前記逆相分抽出手段は、
前記第1の信号を前記第1の伝達関数によって信号処理し、前記第2の信号を前記第3の伝達関数によって信号処理し、これらを加算することで前記第1の逆相分信号を抽出し、
前記第1の信号を前記第2の伝達関数によって信号処理し、前記第2の信号を前記第1の伝達関数によって信号処理し、これらを加算することで前記第2の逆相分信号を抽出し、
前記三相交流の基本波の角周波数をω0、時定数をTとした場合、
前記第1の伝達関数は、
G1(s)=(T2・s2+T・s+T2・ω02)/{(T・s+1)2+(T・ω0)2}
であり、
前記第2の伝達関数は、
G2(s)=−T・ω0/{(T・s+1)2+(T・ω0)2}
であり、
前記第3の伝達関数は、
G3(s)=T・ω0/{(T・s+1)2+(T・ω0)2}
である、
ことを特徴とする不平衡率検出装置。
【請求項3】
前記不平衡率算出手段は、前記第1の正相分信号をXα、前記第2の正相分信号をXβ、前記第1の逆相分信号をYα、前記第2の逆相分信号をYβとすると、下記式を用いて不平衡率kを算出する、
請求項1または2に記載の不平衡率検出装置。
【数1】
【請求項4】
前記不平衡率算出手段によって算出された不平衡率を表示するための表示手段をさらに備えている、請求項1ないし3のいずれかに記載の不平衡率検出装置。
【請求項5】
前記3つの信号は、三相交流の各相電圧を検出した相電圧信号である、請求項1ないし4のいずれかに記載の不平衡率検出装置。
【請求項6】
前記3つの信号は、三相交流の各線間電圧を検出した線間電圧信号である、請求項1ないし4のいずれかに記載の不平衡率検出装置。
【請求項7】
三相交流に基づく3つの信号を第1の信号および第2の信号に変換する第1の工程と、
前記第1の信号を第1の伝達関数によって信号処理し、前記第2の信号を第2の伝達関数によって信号処理し、これらを加算することで第1の正相分信号を抽出する第2の工程と、
前記第1の信号を第3の伝達関数によって信号処理し、前記第2の信号を前記第1の伝達関数によって信号処理し、これらを加算することで第2の正相分信号を抽出する第3の工程と、
前記第1の信号を前記第1の伝達関数によって信号処理し、前記第2の信号を前記第3の伝達関数によって信号処理し、これらを加算することで第1の逆相分信号を抽出する第4の工程と、
前記第1の信号を前記第2の伝達関数によって信号処理し、前記第2の信号を前記第1の伝達関数によって信号処理し、これらを加算することで第2の逆相分信号を抽出する第5の工程と、
前記第2の工程によって抽出された前記第1の正相分信号と、前記第3の工程によって抽出された前記第2の正相分信号と、前記第4の工程によって抽出された前記第1の逆相分信号と、前記第5の工程によって抽出された前記第2の逆相分信号とから、不平衡率を算出する第6の工程と、
を備えており、
前記三相交流の基本波の角周波数をω0、時定数をTとした場合、
前記第1の伝達関数は、
G1(s)=(T・s+1)/{(T・s+1)2+(T・ω0)2}
であり、
前記第2の伝達関数は、
G2(s)=−T・ω0/{(T・s+1)2+(T・ω0)2}
であり、
前記第3の伝達関数は、
G3(s)=T・ω0/{(T・s+1)2+(T・ω0)2}
である、
ことを特徴とする不平衡率検出方法。
【図1】

【図2】
【図3】
【図4】

【図5】
【図7】
【図8】
【図10】
【図6】
【図9】
【図2】
【図3】
【図4】
【図5】
【図7】
【図8】
【図10】
【図6】
【図9】
【公開番号】特開2013−101016(P2013−101016A)
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【出願番号】特願2011−244191(P2011−244191)
【出願日】平成23年11月8日(2011.11.8)
【出願人】(000000262)株式会社ダイヘン (990)
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【出願日】平成23年11月8日(2011.11.8)
【出願人】(000000262)株式会社ダイヘン (990)
[ Back to top ]