
伸縮式穀粒排出オーガ
【課題】伸縮式穀粒排出オーガによる穀粒排出作業を中断してこのオーガを短縮させる際に、オーガ内に残留した穀粒の圧縮を防止して該オーガの螺旋の破損を防止する。
【解決手段】伸縮搬送螺旋(1)の基部を、固定搬送螺旋(3)の先端から穀粒の受継ぎを可能に接続するが、伝動上は分離、独立した伸縮式穀粒排出オーガ(5)を構成し、固定搬送螺旋(3)は、排出クラッチ(8)経由の動力で、伸縮搬送螺旋(1)は、搬送筒(2)に装備した制御モータ(9)で、それぞれ伝動される構成とし、制御モータ(9)は、排出クラッチ(8)の切り操作後、伸縮用搬送筒(2)内の残留穀粒が無くなるまで伸縮搬送螺旋(1)を伝動する構成とする。
【解決手段】伸縮搬送螺旋(1)の基部を、固定搬送螺旋(3)の先端から穀粒の受継ぎを可能に接続するが、伝動上は分離、独立した伸縮式穀粒排出オーガ(5)を構成し、固定搬送螺旋(3)は、排出クラッチ(8)経由の動力で、伸縮搬送螺旋(1)は、搬送筒(2)に装備した制御モータ(9)で、それぞれ伝動される構成とし、制御モータ(9)は、排出クラッチ(8)の切り操作後、伸縮用搬送筒(2)内の残留穀粒が無くなるまで伸縮搬送螺旋(1)を伝動する構成とする。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、伸縮式穀粒排出オーガに関する。
【背景技術】
【0002】
従来からコンバインのグレンタンクには、貯留した穀粒を、運搬車両の穀粒タンクに搬出するために、穀粒排出オーガが装備されている。そして、穀粒排出オーガは、運搬車両に搭載されている穀粒タンクに、先端の穀粒排出口を遠近方向に移動調節しながら近づけて排出位置を選択する範囲を拡大するために、伸縮螺旋を内装・軸架した伸縮式の移送筒が開発され、実用化されている。
【0003】
そして、この種の伸縮式穀粒排出オーガは、伸縮用搬送筒を伸長した位置から短縮するときに、筒内に穀粒が残留すると問題が生じるが、これを技術的に解決したのが本件出願である。
【0004】
以下、開示する公知技術は、一般的な排出オーガであって、伸縮式の穀粒排出オーガではないが、オーガの先端部分の穀粒を「副排出螺旋」を設けて排出する技術が公開されている。
【0005】
下記特許文献1の明細書と図面の記載を要約すると、つぎの通りである。
「穀粒排出作業において、作業の途中でベルトテンションクラッチ59を切り操作すると、コントローラ64は、スイッチ65がクラッチ59の切り操作を検出して入力し、制御信号を出して電動モータ62を一定時間駆動して、副排出螺旋61を一定時間駆動し、排出筒内先端部付近に残留する穀粒を全て穀粒排出口から排出する。」
そのため、穀粒排出口63から穀粒がこぼれる不具合がなくなる、と記載されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2000−333527号公開特許公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
従来、コンバインに搭載されているグレンタンクから穀粒を機外、例えば、農道に待機している穀粒運搬車両の穀粒タンク(コンテナ)に搬出する場合、伸縮式穀粒排出オーガは、伸縮用搬送筒を最長の位置まで伸長して穀粒の排出作業を行っている途中で、この穀粒運搬車両の穀粒タンクが満杯になったために全ての搬送螺旋を停止して排出作業を中断すると、伸縮用搬送筒内には搬送途中の穀粒が残留する。このような状態で、制御モータを駆動しながら伸縮用搬送筒を短縮方向へ移動操作すると、この伸縮用搬送筒内に残留している穀粒が伸縮螺旋のピッチ間に挟まれて損傷したり、この残留穀粒の圧縮後、再度、伸縮用搬送筒を伸張させる際に伸縮螺旋側の伸縮部分が破損する等の障害が発生すると共に、伸縮機構を構成する制御モータが過負荷の状態になって無理をし、故障する等、多くの課題があった。
【課題を解決するための手段】
【0008】
この発明は、上記課題を解決するために、つぎの如き技術手段を講じている。
請求項1記載の発明は、伸縮搬送螺旋(1)を内装した伸縮用搬送筒(2)を、固定搬送螺旋(3)を内装した固定搬送筒(4)の先端側から摺動自由に重ね合わせて伸縮式穀粒排出オーガ(5)を構成し、該伸縮式穀粒排出オーガ(5)の基部をグレンタンク(6)に接続した揚穀筒(7)の上端部に横方向と上下方向とに回動自由に連結し、前記伸縮搬送螺旋(1)と固定搬送螺旋(3)の伝動を分離して互いに独立して駆動可能な構成とし、前記固定搬送螺旋(3)は排出クラッチ(8)経由の回転動力で駆動し、前記伸縮搬送螺旋(1)は伸縮用搬送筒(2)に装備した制御モータ(9)で駆動する構成とし、排出クラッチ(8)の切り操作後、制御モータ(9)によって、伸縮用搬送筒(2)内の残留穀粒がほとんど無くなるまで伸縮搬送螺旋(1)の駆動が継続される構成としたことを特徴とする伸縮式穀粒排出オーガとしたものである。
【0009】
先端側にある伸縮用搬送筒(2)を伸長させた状態で穀粒の排出作業をしているとき、排出クラッチ(8)を切り操作して排出作業を中断しても、伸縮搬送螺旋(1)は、伸縮用搬送筒(2)に装備している制御モータ(9)によって駆動状態が継続される。したがって、伸縮搬送螺旋(1)は、伸縮用搬送筒(2)内の残留穀粒がほとんど無くなるまで駆動される。その後、伸縮制御モータを駆動しながら伸長した伸縮用搬送筒(2)を短縮作動しても、螺旋の破損等が起こらず、従来の課題を解消して、伸縮式穀粒排出オーガ(5)を安全に収納することができる。
【0010】
請求項2記載の発明は、前記排出クラッチ(8)の切り操作後に制御モータ(9)の駆動が継続される延長駆動状態は、前記伸縮用搬送筒(2)に装備した穀粒センサ(10)による残留穀粒の非検出情報に基づいて終了する構成としたことを特徴とする請求項1記載の伸縮式穀粒排出オーガとしたものである。
【0011】
制御モータ(9)は、伸縮用搬送筒(2)に装備した穀粒センサ(10)が伸縮用搬送筒(2)内に残留穀粒が無くなったことを検出すると、停止する。このように、排出作業が途中で中断しても、伸縮用搬送筒(2)内部のほとんどの穀粒が排出されるまで排出作業が続けられるから、従来の課題を解消でき、伸縮式穀粒排出オーガ(5)を安全に短縮して収納することができる。
【0012】
請求項3記載の発明は、前記排出クラッチ(8)の切り操作後に制御モータ(9)の駆動が継続される延長駆動時間を、前記排出クラッチ(8)の切り操作時における伸縮用搬送筒(2)の摺動位置に基づいて設定する構成としたことを特徴とする請求項1記載の伸縮式穀粒排出オーガとしたものである。
【0013】
伸縮搬送螺旋(1)の延長駆動時間を、排出作業時に伸長していた長さ(寸法)に基づいて設定するから、伸縮式穀粒排出ーガ(5)が長く延びておれば延長駆動時間をそれに応じて長くし、伸縮用搬送筒(5)内の穀粒を残らず排出するものである。伸縮用搬送筒(2)内に残留する穀粒量は、伸長した伸縮用搬送筒(2)の長さに比例するものと推定している。
【0014】
請求項4記載の発明は、前記排出クラッチ(8)の切り操作後に制御モータ(9)の駆動が継続される延長駆動時間を、穀粒排出時における伸縮用搬送筒(2)の傾斜姿勢に基づいて設定する構成としたことを特徴とする請求項1記載の伸縮式穀粒排出オーガとしたものである。
【0015】
穀粒の排出作業は、伸縮用搬送筒(2)の排出作業時の傾斜姿勢によって、穀粒の排出に要する力に差があり、急勾配になると排出時間が長く必要になる。
したがって、伸縮搬送筒(2)の排出作業時の傾斜姿勢が急勾配になれば時間を長くし、緩くなれば短く設定する構成にして排出作業の実態に合わせている。
【発明の効果】
【0016】
請求項1記載の発明によると、従来の課題を解消して、排出作業中断後に伸縮式穀粒排出オーガ(5)を短縮させる際に、伸縮搬送螺旋(1)での圧縮による残留穀粒の破砕もなく、伸縮搬送螺旋(1)の破損等も起こらず、伸縮用搬送筒(2)を安全に短縮して収納することができる。更には、排出作業中断後に、伸縮用搬送筒(2)内に残留する穀粒がほとんど排出されるから、制御モータ(9)を駆動しながら伸縮用搬送筒(2)を短縮させても、伸縮搬送螺旋(1)の破損はなく、制御モータ(9)が過負荷状態になって無理をする場面の発生もなくなって、故障等を未然に防止できる。
【0017】
請求項2記載の発明によると、上記請求項1記載の発明の効果を奏するうえに、制御モータ(9)を、伸縮用搬送筒(2)に装備した穀粒センサ(10)の検出情報に基づいて制御できるから、穀粒を伸縮用搬送筒(2)内に残すことなく排出でき、従来の課題を解消して、伸縮式穀粒排出オーガ(5)を安全に短縮して正規の収納位置に収納することができる。
【0018】
請求項3記載の発明によると、排出作業中断時に、伸縮用搬送筒(2)内に残留する穀粒量を、伸長した伸縮用搬送筒(2)の長さ(伸長した寸法)に比例するものと推定し、伸縮用搬送筒(2)の伸長寸法に応じて制御モータ(9)の延長駆動時間を設定するから、伸縮用搬送筒(2)内の穀粒を残らず排出できる。
【0019】
請求項4記載の発明によると、排出作業中断後の制御モータ(10)による伸縮搬送螺旋(1)の延長駆動時間を、伸縮用搬送筒(2)の排出作業時の傾斜姿勢によって、穀粒排出に要する力に差が生じることを考慮して設定するものであり、排出作業時に伸縮用搬送筒(2)がどのような傾斜姿勢にあっても、残留穀粒のほとんどを排出できる。
【図面の簡単な説明】
【0020】
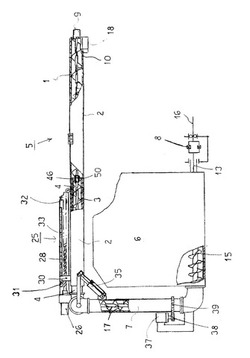
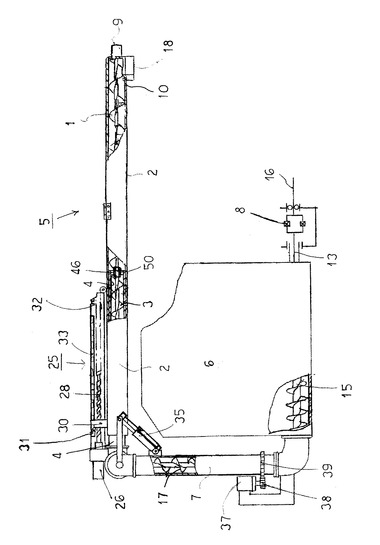
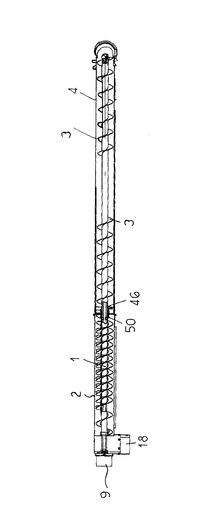
【図1】グレンタンクに装備した伸縮式穀粒排出オーガの一部破断側面図
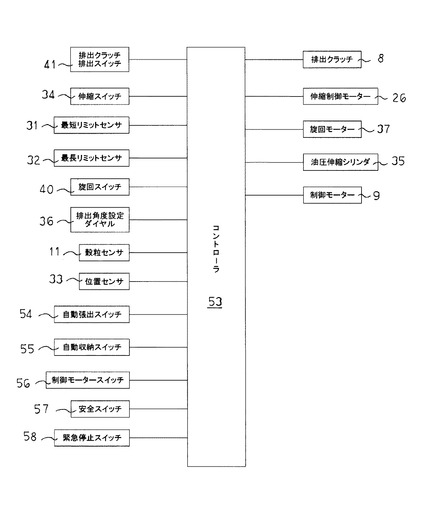
【図2】制御機構のブロック図
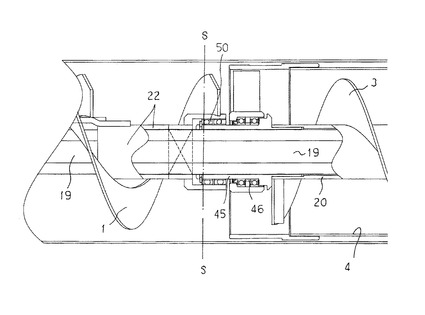
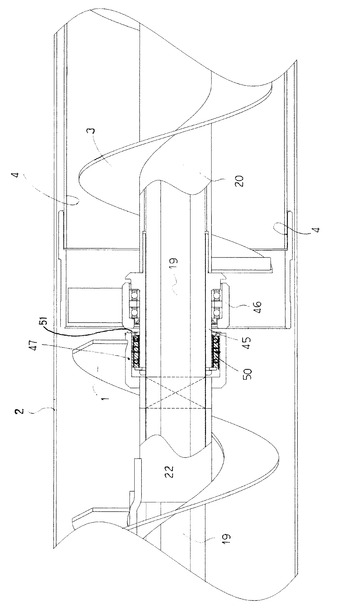
【図3】伸縮搬送螺旋と固定搬送螺旋との接続部の軸受構成の破断側面図
【図4】前図3のS−S線における断面図
【図5】伸縮式穀粒排出オーガの先端部分の側断面図
【図6】伸縮式穀粒排出オーガの正面図
【図7】伸長状態にある伸縮式穀粒排出オーガの側断面図
【図8】短縮状態にある伸縮式穀粒排出オーガの側断面図
【図9】別実施形態における伸縮搬送螺旋と固定搬送螺旋との接続部軸受構成の破断側面図
【発明を実施するための最良の形態】
【0021】
以下、図面に基づいて、この発明の実施例を具体的に説明する。
まず、コンバインの走行フレーム上に搭載したグレンタンク6は、図1に示すように、排出螺旋軸15を、タンク6の底面に前後方向へ向けて軸装し、前側から伝動する構成としている。16は入力軸、8は排出クラッチを示している。そして、揚穀筒7は、揚穀螺旋軸17を内装し、前記グレンタンク6の後部に装備し、下部を前記グレンタンク6の後部側の下部に接続し、前記排出螺旋軸15の後部に、前記揚穀螺旋軸17の下端部を連結して伝動可能にすると共に、排出穀粒の受継ぎができるように接続した構成としている。
【0022】
そして、伸縮式穀粒排出オーガ5は、図1に示すように、前記揚穀筒7の上部に、基部を連結し、先端部を前方へ長く延長して先端側の伸縮用移送筒2の先端部には穀粒排出口18を開口して設け、前記グレンタンク6内の穀粒を搬送し、排出できる構成としている。
【0023】
つぎに、伸縮式穀粒排出オーガ5について具体的に説明する。
まず、固定搬送筒4は、基部を前記揚穀筒7の上部に連結し、先端部を外方に延長して設け、その筒内には伸縮しない固定搬送螺旋3を内装して構成している。そして、伸縮用搬送筒2は、基部を前記固定搬送筒4の先端から外側に嵌合して摺動自在に重ね合わせて連結している。また、伸縮搬送螺旋1は、図5に示すように、伸縮用搬送筒2内において、六角軸19に軸装し、その六角軸19の先端部を前記穀粒排出口18の上方位置に軸受けして後部を固定搬送筒4側に延長して前記固定搬送螺旋3のパイプ軸20内に摺動自在に挿入して構成している。
【0024】
そして、実施例の伸縮搬送螺旋1は、図3、乃至図8に示すように、前記六角軸19に多数の螺旋単体1a,1b,1cを軸方向に摺動自在に嵌合し、相互間では間隔が調節できるように、前後に係止具を備えた構成としている。その具体構成を述べると、各螺旋単体1a,1b,1cは、前部に前側係合部が、後部に後側係合部がそれぞれ設けられ、相互に、前側の螺旋単体1aの後側係合部に、つぎの螺旋単体1bの前側係合部が係合し、該螺旋単体1bの後側係合部に、つぎの螺旋単体1cの前側係合部が係合して連結し、伸びきった状態でも離脱せず、常時、鎖状の連結状態を保つ構成となっている。
【0025】
そして、前記六角軸19は、実施例の場合、各螺旋単体1a,1b,1cを取り付けている挿通ボス筒22も内側孔を六角筒にして摺動自在に挿通し、軸の回転方向へは固定状態で伝動可能とし、軸方向には摺動自在で伸縮可能に構成している。
【0026】
つぎに、伸縮駆動装置25は、図1に示すように、前記揚穀筒7の上部に装備した伸縮制御モータ26に減速装置を介して移動螺旋軸28の基部を連結して強制駆動する構成としている。そして、移動装置30は、前記移動螺旋軸28の螺旋溝に係合している伝動ピンを介して強制的に軸方向に移動するように設け、前記伸縮用搬送筒2の基部側に一体に連結して構成している。
【0027】
そして、前記伸縮駆動装置25は、図1に示すように、伸縮式穀粒排出オーガ5の最短縮位置と最伸長位置とにそれぞれリミットセンサ31,32を設け、前記移動装置30が、リミットセンサ31、又は32に達すると、前記伸縮制御モータ26が自動停止する構成としている。
【0028】
そして、位置センサ33は、移動装置30の全移動工程の位置が検出できるように伸縮駆動装置25の内部に配置し、伸縮用搬送筒2の伸長位置が検出できる構成としている。
そして、伸縮制御モータ26は、図示は省略したが、運転席の操作パネルに設けた伸縮スイッチ34のON操作によって正転、又は逆転方向に駆動されて、移動螺旋軸28を正転、又は逆転方向に駆動する構成としている。そして、伸縮用搬送筒2は、移動螺旋軸28が正転すれば、移動装置30を介して伸長し、逆転すれば短縮方向に強制的に移動する構成としている。
【0029】
このように、伸縮用搬送筒2は、固定搬送筒4に嵌合した状態で固定搬送筒4に沿って伸び縮みして、先端部の穀粒排出口18の位置を基部側の揚穀筒11に対して遠ざけたり、近づけたり調節して穀粒の落下位置を任意に選択できる構成としている。
【0030】
そして、伸縮式穀粒排出オーガ5は、図1に示すように、油圧伸縮シリンダー35を伸縮すると基部の横軸を支点にして先端部(穀粒排出口18側)が上下方向に昇降して穀粒の排出傾斜角度の調節が可能となっている。なお、この穀粒排出傾斜角度は、排出角度設定ダイヤル36で設定できる構成としている。
【0031】
そして、穀粒排出オーガ5は、図1に示すように、下部の旋回モータ37を操作すれば、駆動ギヤ38から旋回ギヤ39を介して揚穀筒7と共に旋回させる事ができる構成となっている。そして、旋回スイッチ40は、運転席の操作パネルに設けている。
【0032】
このように、伸縮式穀粒排出オーガ5は、コンバインの上方で旋回させたり、排出傾斜角度を調節したり、伸縮調節して穀粒の排出位置を選択することができるものとなっている。
【0033】
つぎに、伸縮搬送螺旋1の伝動構成と、固定搬送螺旋3との接続、及び支持の構成について、図3、乃至図5に基づき説明する。
まず、伸縮搬送螺旋1は、挿入ボス筒22を介して六角軸19に摺動可能に支持され、その六角軸19が、固定搬送螺旋3のパイプ軸20内に挿入されて支持されている。そして、伝動パイプ軸45は、固定搬送筒4の先端部に軸受装置46によって軸受け支持されており、内部には六角軸19を貫通させ、パイプ軸20と一体に連結して伝動可能に構成している。
【0034】
なお、実施例の場合、六角軸19は、パイプ軸20に遊嵌状態に挿入され、支持されている。
そして、第二軸受装置50は、図3、図4、図9に示すように、前記伝動パイプ軸45の外側と、伸縮搬送螺旋1を固着した挿入ボス筒22に固着している伝動輪47の内側との間に構成し、固定搬送螺旋3と伸縮搬送螺旋1とを分離し、動力が伝わらないようして、伝動上、両者は、各々が独立した構成となっている。そして、伸縮搬送螺旋1は、図3、及び図5に示すように、伸縮用搬送筒2の先端、外側に設けた制御モータ9によって伝動され、固定搬送螺旋3の終端部分から搬送穀粒を受け継いで搬送できる構成としている。
【0035】
この場合、固定搬送螺旋3の終端部分と伸縮搬送螺旋1の始端部との構成は、図3に示すように、穀粒の搬送方向上手側(固定搬送螺旋3側)から下手側に穀粒が円滑に流れるように、又、藁屑等がひっかからないように上手側より下手側の外径を小径にして構成するのが望ましい。図9の構成例は、第二軸受装置50の前に巻付き防止具51を介装して藁屑等の浸入を防いだ構成としている。
【0036】
そして、前記制御モータ9は、具体的な図示は省略しているが、コンバインの車体に搭載しているバッテリーを電源として駆動する構成としている。なお、制御モータ10は、専用のバッテリーを一体に装備する構成にしても良い。
【0037】
なお、バッテリーを使用する場合、そのバッテリーの電力容量(残電力量)をモニタ等に表示して警告しながら運転できる構成にしたり、電力量が、一定以下に減少すると、制御モータ9が始動できないように牽制機構を装備すると、安全な運転ができる。
【0038】
つぎに、実施例の制御機構について、図2に基づき説明する。
まず、コントローラ53は、入力側に、排出クラッチ・スイッテ41、伸縮スイッチ34、最短リミットセンサ31、最長リミットセンサ32、旋回スイッチ40、排出角度設定ダイヤル36、穀粒センサ10、位置センサ33、自動張出スイッチ54、自動収納スイッチ55、制御モータ・スイッチ56、安全スイッチ57、緊急停止スイッチ58をそれぞれ接続し、操作情報、検出情報を入力できる構成としている。
【0039】
そして、コントローラ53は、出力側に、排出クラッチ8、伸縮制御モータ26、旋回モータ37、油圧伸縮シリンダー35、制御モータ9をそれぞれ接続して設け、出力する制御信号に基づいて制御できる構成としている。
【0040】
以上のように構成した実施例の作用について述べる。
コンバインは、グレンタンク6が満タンになると、農道に待機している穀粒運搬車両のタンクに、グレンタンク6に貯留した穀粒の搬出作業を行う。その場合、伸縮式穀粒排出オーガ5は、自動張出スイッチ54をON操作して収納した状態から排出位置に張出し作業を行う。そして、伸縮式穀粒排出オーガ5は、伸縮スイッチ34を操作して伸縮用搬送筒2を伸長しながら、穀粒運搬車両のタンクまで届かせて排出位置に穀粒排出口18を臨ませ排出作業の準備をする。
【0041】
続いて、伸縮式穀粒排出オーガ5は、排出クラッチ8を入り操作(排出クラッチ・スイッチ41をON)して、グレンタンク6内の排出螺旋軸15を伝動し、揚穀螺旋軸17、固定搬送螺旋3の順に伝動する。そして、後続する伸縮搬送螺旋1は、前記固定搬送螺旋3とは、伝動上独立しており、制御モータ・スイッチのON操作によって制御モータ9が始動され、これによって伝動される。このようにして、グレンタンク6内に貯留されている穀粒は、一連の搬送螺旋が伝動されて、運搬車両のタンクに排出される。
【0042】
そして、他の実施例における伸縮搬送螺旋1は、排出クラッチ・スイッチ41のON操作すると、関連してコントローラ53から制御モータ9に制御信号が出力されて始動され、タイミング的に固定搬送螺旋3より先に伝動される構成にして、穀粒の受継部における搬送の円滑化を図るものとしている。更に、この場合、伸縮搬送螺旋1は、前側の固定搬送螺旋3と少なくとも同一回転速度か、又は、高速で回転できるように構成している。そして、伸縮搬送螺旋1は、変速時においても、固定搬送螺旋3より低速にはならないように配慮した構成としている。
【0043】
以上のように構成することによって、実施例の伸縮搬送螺旋1は、その搬送始端部分において固定搬送螺旋3の搬送終端部からの穀粒の受継ぎ作用を、停滞することなく、円滑に受け継ぎながら搬送することができる。
【0044】
このような排出作業の途中において、例えば、穀粒運搬車両のタンクが満杯近くになって作業を中断する場合、排出クラッチ・スイッチ41をOFFにして排出クラッチ9を切り操作すると、排出螺旋軸15から固定搬送螺旋3までは停止する。しかし、制御モータ9は、駆動状態のままであるから、先端側の伸縮用搬送筒2内に軸架している伸縮搬送螺旋1は継続して駆動されている。そのとき、伸縮式穀粒排出オーガ5は、伸長した状態で筒内に搬送途中の穀粒が溜まったまま停止が、上記のように、制御モータ9によって伸縮搬送螺旋1が伝動されているから、伸縮用搬送筒2内に残留している穀粒の排出作業は継続されている。
【0045】
そして、コントローラ50は、伸縮用搬送筒2内の残留穀粒がなくなると、穀粒センサ10の検出情報に基づいて制御モータ9に制御信号を出力し、停止させ、伸縮搬送螺旋1の搬送を終了する。
【0046】
以上のように、この発明の実施例は、排出クラッチ8の切り操作による排出作業の中断後でも、継続して制御モータ9が駆動されて伸縮搬送螺旋1が駆動され、伸縮用搬送筒2内の残留穀粒をほとんど排出することができる。したがって、実施例に係る伸縮式穀粒排出オーガ5は、その後、短縮作動させても、残留穀粒の破砕もなく、伸縮搬送螺旋1の破損等も起こらず、伸縮用搬送筒2を安全に短縮して収納することができる。更に、実施例は、作業中断直後において、伸縮用搬送筒2内に残留する穀粒がほとんど排出されるから、伸縮制御モータ26を駆動しながら筒2を短縮しても、従来の如く、過負荷状態になって無理をする場面の発生もなく、故障等を未然に防止できる利点がある。
【0047】
なお、制御モータ9は、伸縮用搬送筒2内に負荷検出用センサを装備して、過負荷状態を検出できる構成とし、設定値以上の負荷を検出すれば、排出クラッチ8まで切りにできる構成にすると、装置の保護を含めて安全に搬出作業ができる。
【0048】
そして、この発明の一つの実施例として、穀粒センサ10に代えて、位置センサ33を設けた構成例も説明している。これは、伸縮用搬送筒2内に残留する穀粒量は、伸長した筒2の長さ(伸長した寸法)に比例するものと推定し、伸縮用搬送排出クラッチ8が切られた後も制御モータ9が延長駆動される時間を、伸縮用搬送筒2の伸長した寸法に応じて決めている。したがって、制御モータ9の延長駆動時間は、前記位置センサ33の検出情報に基づいて制御されるから、ほぼ実態に合っており、筒内の穀粒を残らず排出できるものとなった。
【0049】
そして、更に、他の実施例では、作業中断後、制御モータ9による延長駆動時間を、排出角度設定ダイヤル36によって設定している伸縮用搬送筒2の排出傾斜角度に基づいて、排出穀粒を持上げ搬送する場合に働く重力を考慮して設定している。この実施例の場合も、作業の実態にあっており、残留穀粒のほとんどを排出できるものとなった。
【0050】
そして、実施例では、延長駆動時間中の制御モータ9は、フル回転時の半分程度の回転速度に保ち、穀粒運搬車両のタンク(コンテナ)からの籾あふれを防止するものとしている。なお、制御モータ9は、その回転速度を伸縮用搬送筒2の伸長寸法に対応して自動変速させ、伸び量が長い場合、高速にして搬出時間を短縮すると、延長駆動時間を常に同程度にすることができる。
【0051】
なお、他の実施例として、制御モータ10は、上述の通り、伸縮搬送螺旋1を伝動するときには、低回転として安全を図る構成としているが、変速スイッチを設けて回転数を変速できる構成にすれば、排出速度が選択できて便利である。その場合、変速スイッチは、ダイヤル式、押しボタン式(押す回数によって変速する)等が考えられる。
【0052】
つぎに、伸縮式穀粒排出オーガ5について、伸縮搬送螺旋1等の破損防止や穀粒排出口18からの籾こぼれの防止、更には、装置を安全に保つために必要な実施例を説明する。
まず、伸縮式穀粒排出オーガ5は、排出クラッチ9を切り操作して、伸縮用搬送筒2内に残留穀粒がある場合には、短縮、及び伸長作動、旋回等を含めて自動収納作動ができないように牽制する機構を設けている。そして、運転席に装備しているモニタは、これを利用して伸縮用搬送筒2内に穀粒が残留している旨の表示をして、オペレーターに警告をし、安全を図る構成としている。なお、モニタには、制御モータ9による穀粒の排出中であること、更に、伸縮用搬送筒2内の残留穀粒の排出が完了すれば、その旨、表示してオペレーターに告知する構成にすると、安全で便利である。
【0053】
なお、制御モータ9は、上記実施例の中ではコントローラー53による制御信号によって始動する構成を説明したが、図2に示すように、制御モータ・スイッチ56、安全スイッチ57、緊急停止スイッチ58等と併設する構成にする事も勿論可能(実施例も装備している)である。
【0054】
そして、これらのスイッチ56、57、58は、当然、運転席にも設けてオペレータが操作できる構成にするが、コンバインの場合、補助作業者が伸縮式穀粒排出オーガ5の先端部分に近い位置に居ても容易に操作ができるように、穀粒排出口18の上部左右にも配置して取り付けた構成としている。このように、制御モータ・スイッチ56、安全スイッチ57、緊急停止スイッチ58等は、運転席のオペレーターと圃場の補助作業者の両方から自由に操作ができるようにしてとおくと、安全で便利であると共に作業能率を高めることができ、緊急時にもきわめて有効である。
【0055】
そして、制御モータ・スイッチ56と安全スイッチ57とは、図6に示すように、伸縮用搬送筒2の先端部分の両側に配置して構成すると、2つのスイッチを操作しながら袋取作業(排出される穀粒を支持杆に受けた穀粒袋に詰める作業)が容易にできる利点がある。なお、これらのスイッチ56,57,58は、押しボタン式スイッチにしたり、スイッチカバーを装備すると、誤操作が少なくすることができる。
【符号の説明】
【0056】
1 伸縮搬送螺旋
2 伸縮用搬送筒
3 固定搬送螺旋
4 固定搬送筒
5 伸縮式穀粒排出オーガ
6 グレンタンク
7 揚穀筒
8 排出クラッチ
9 制御モータ
10 穀粒センサ
【技術分野】
【0001】
この発明は、伸縮式穀粒排出オーガに関する。
【背景技術】
【0002】
従来からコンバインのグレンタンクには、貯留した穀粒を、運搬車両の穀粒タンクに搬出するために、穀粒排出オーガが装備されている。そして、穀粒排出オーガは、運搬車両に搭載されている穀粒タンクに、先端の穀粒排出口を遠近方向に移動調節しながら近づけて排出位置を選択する範囲を拡大するために、伸縮螺旋を内装・軸架した伸縮式の移送筒が開発され、実用化されている。
【0003】
そして、この種の伸縮式穀粒排出オーガは、伸縮用搬送筒を伸長した位置から短縮するときに、筒内に穀粒が残留すると問題が生じるが、これを技術的に解決したのが本件出願である。
【0004】
以下、開示する公知技術は、一般的な排出オーガであって、伸縮式の穀粒排出オーガではないが、オーガの先端部分の穀粒を「副排出螺旋」を設けて排出する技術が公開されている。
【0005】
下記特許文献1の明細書と図面の記載を要約すると、つぎの通りである。
「穀粒排出作業において、作業の途中でベルトテンションクラッチ59を切り操作すると、コントローラ64は、スイッチ65がクラッチ59の切り操作を検出して入力し、制御信号を出して電動モータ62を一定時間駆動して、副排出螺旋61を一定時間駆動し、排出筒内先端部付近に残留する穀粒を全て穀粒排出口から排出する。」
そのため、穀粒排出口63から穀粒がこぼれる不具合がなくなる、と記載されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2000−333527号公開特許公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
従来、コンバインに搭載されているグレンタンクから穀粒を機外、例えば、農道に待機している穀粒運搬車両の穀粒タンク(コンテナ)に搬出する場合、伸縮式穀粒排出オーガは、伸縮用搬送筒を最長の位置まで伸長して穀粒の排出作業を行っている途中で、この穀粒運搬車両の穀粒タンクが満杯になったために全ての搬送螺旋を停止して排出作業を中断すると、伸縮用搬送筒内には搬送途中の穀粒が残留する。このような状態で、制御モータを駆動しながら伸縮用搬送筒を短縮方向へ移動操作すると、この伸縮用搬送筒内に残留している穀粒が伸縮螺旋のピッチ間に挟まれて損傷したり、この残留穀粒の圧縮後、再度、伸縮用搬送筒を伸張させる際に伸縮螺旋側の伸縮部分が破損する等の障害が発生すると共に、伸縮機構を構成する制御モータが過負荷の状態になって無理をし、故障する等、多くの課題があった。
【課題を解決するための手段】
【0008】
この発明は、上記課題を解決するために、つぎの如き技術手段を講じている。
請求項1記載の発明は、伸縮搬送螺旋(1)を内装した伸縮用搬送筒(2)を、固定搬送螺旋(3)を内装した固定搬送筒(4)の先端側から摺動自由に重ね合わせて伸縮式穀粒排出オーガ(5)を構成し、該伸縮式穀粒排出オーガ(5)の基部をグレンタンク(6)に接続した揚穀筒(7)の上端部に横方向と上下方向とに回動自由に連結し、前記伸縮搬送螺旋(1)と固定搬送螺旋(3)の伝動を分離して互いに独立して駆動可能な構成とし、前記固定搬送螺旋(3)は排出クラッチ(8)経由の回転動力で駆動し、前記伸縮搬送螺旋(1)は伸縮用搬送筒(2)に装備した制御モータ(9)で駆動する構成とし、排出クラッチ(8)の切り操作後、制御モータ(9)によって、伸縮用搬送筒(2)内の残留穀粒がほとんど無くなるまで伸縮搬送螺旋(1)の駆動が継続される構成としたことを特徴とする伸縮式穀粒排出オーガとしたものである。
【0009】
先端側にある伸縮用搬送筒(2)を伸長させた状態で穀粒の排出作業をしているとき、排出クラッチ(8)を切り操作して排出作業を中断しても、伸縮搬送螺旋(1)は、伸縮用搬送筒(2)に装備している制御モータ(9)によって駆動状態が継続される。したがって、伸縮搬送螺旋(1)は、伸縮用搬送筒(2)内の残留穀粒がほとんど無くなるまで駆動される。その後、伸縮制御モータを駆動しながら伸長した伸縮用搬送筒(2)を短縮作動しても、螺旋の破損等が起こらず、従来の課題を解消して、伸縮式穀粒排出オーガ(5)を安全に収納することができる。
【0010】
請求項2記載の発明は、前記排出クラッチ(8)の切り操作後に制御モータ(9)の駆動が継続される延長駆動状態は、前記伸縮用搬送筒(2)に装備した穀粒センサ(10)による残留穀粒の非検出情報に基づいて終了する構成としたことを特徴とする請求項1記載の伸縮式穀粒排出オーガとしたものである。
【0011】
制御モータ(9)は、伸縮用搬送筒(2)に装備した穀粒センサ(10)が伸縮用搬送筒(2)内に残留穀粒が無くなったことを検出すると、停止する。このように、排出作業が途中で中断しても、伸縮用搬送筒(2)内部のほとんどの穀粒が排出されるまで排出作業が続けられるから、従来の課題を解消でき、伸縮式穀粒排出オーガ(5)を安全に短縮して収納することができる。
【0012】
請求項3記載の発明は、前記排出クラッチ(8)の切り操作後に制御モータ(9)の駆動が継続される延長駆動時間を、前記排出クラッチ(8)の切り操作時における伸縮用搬送筒(2)の摺動位置に基づいて設定する構成としたことを特徴とする請求項1記載の伸縮式穀粒排出オーガとしたものである。
【0013】
伸縮搬送螺旋(1)の延長駆動時間を、排出作業時に伸長していた長さ(寸法)に基づいて設定するから、伸縮式穀粒排出ーガ(5)が長く延びておれば延長駆動時間をそれに応じて長くし、伸縮用搬送筒(5)内の穀粒を残らず排出するものである。伸縮用搬送筒(2)内に残留する穀粒量は、伸長した伸縮用搬送筒(2)の長さに比例するものと推定している。
【0014】
請求項4記載の発明は、前記排出クラッチ(8)の切り操作後に制御モータ(9)の駆動が継続される延長駆動時間を、穀粒排出時における伸縮用搬送筒(2)の傾斜姿勢に基づいて設定する構成としたことを特徴とする請求項1記載の伸縮式穀粒排出オーガとしたものである。
【0015】
穀粒の排出作業は、伸縮用搬送筒(2)の排出作業時の傾斜姿勢によって、穀粒の排出に要する力に差があり、急勾配になると排出時間が長く必要になる。
したがって、伸縮搬送筒(2)の排出作業時の傾斜姿勢が急勾配になれば時間を長くし、緩くなれば短く設定する構成にして排出作業の実態に合わせている。
【発明の効果】
【0016】
請求項1記載の発明によると、従来の課題を解消して、排出作業中断後に伸縮式穀粒排出オーガ(5)を短縮させる際に、伸縮搬送螺旋(1)での圧縮による残留穀粒の破砕もなく、伸縮搬送螺旋(1)の破損等も起こらず、伸縮用搬送筒(2)を安全に短縮して収納することができる。更には、排出作業中断後に、伸縮用搬送筒(2)内に残留する穀粒がほとんど排出されるから、制御モータ(9)を駆動しながら伸縮用搬送筒(2)を短縮させても、伸縮搬送螺旋(1)の破損はなく、制御モータ(9)が過負荷状態になって無理をする場面の発生もなくなって、故障等を未然に防止できる。
【0017】
請求項2記載の発明によると、上記請求項1記載の発明の効果を奏するうえに、制御モータ(9)を、伸縮用搬送筒(2)に装備した穀粒センサ(10)の検出情報に基づいて制御できるから、穀粒を伸縮用搬送筒(2)内に残すことなく排出でき、従来の課題を解消して、伸縮式穀粒排出オーガ(5)を安全に短縮して正規の収納位置に収納することができる。
【0018】
請求項3記載の発明によると、排出作業中断時に、伸縮用搬送筒(2)内に残留する穀粒量を、伸長した伸縮用搬送筒(2)の長さ(伸長した寸法)に比例するものと推定し、伸縮用搬送筒(2)の伸長寸法に応じて制御モータ(9)の延長駆動時間を設定するから、伸縮用搬送筒(2)内の穀粒を残らず排出できる。
【0019】
請求項4記載の発明によると、排出作業中断後の制御モータ(10)による伸縮搬送螺旋(1)の延長駆動時間を、伸縮用搬送筒(2)の排出作業時の傾斜姿勢によって、穀粒排出に要する力に差が生じることを考慮して設定するものであり、排出作業時に伸縮用搬送筒(2)がどのような傾斜姿勢にあっても、残留穀粒のほとんどを排出できる。
【図面の簡単な説明】
【0020】
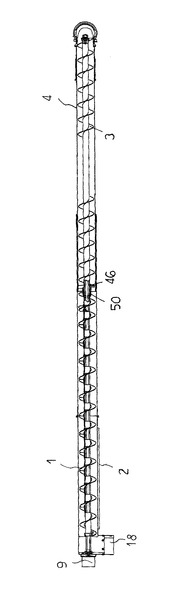
【図1】グレンタンクに装備した伸縮式穀粒排出オーガの一部破断側面図
【図2】制御機構のブロック図
【図3】伸縮搬送螺旋と固定搬送螺旋との接続部の軸受構成の破断側面図
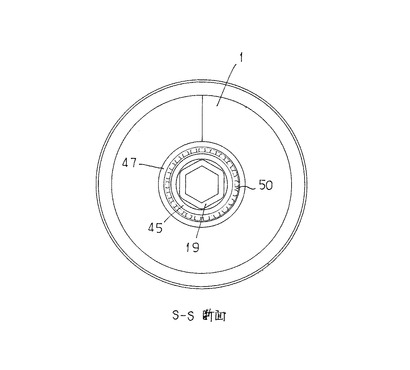
【図4】前図3のS−S線における断面図
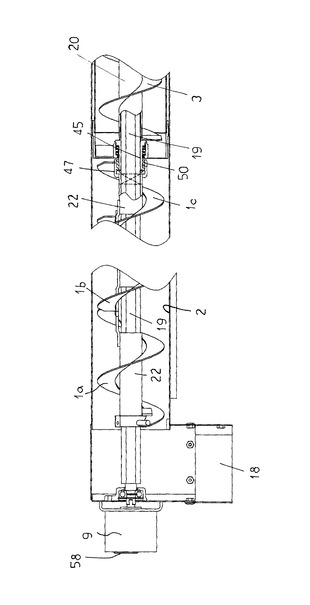
【図5】伸縮式穀粒排出オーガの先端部分の側断面図
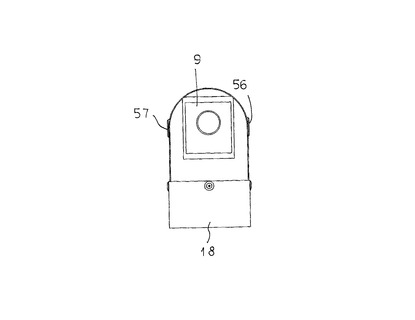
【図6】伸縮式穀粒排出オーガの正面図
【図7】伸長状態にある伸縮式穀粒排出オーガの側断面図
【図8】短縮状態にある伸縮式穀粒排出オーガの側断面図
【図9】別実施形態における伸縮搬送螺旋と固定搬送螺旋との接続部軸受構成の破断側面図
【発明を実施するための最良の形態】
【0021】
以下、図面に基づいて、この発明の実施例を具体的に説明する。
まず、コンバインの走行フレーム上に搭載したグレンタンク6は、図1に示すように、排出螺旋軸15を、タンク6の底面に前後方向へ向けて軸装し、前側から伝動する構成としている。16は入力軸、8は排出クラッチを示している。そして、揚穀筒7は、揚穀螺旋軸17を内装し、前記グレンタンク6の後部に装備し、下部を前記グレンタンク6の後部側の下部に接続し、前記排出螺旋軸15の後部に、前記揚穀螺旋軸17の下端部を連結して伝動可能にすると共に、排出穀粒の受継ぎができるように接続した構成としている。
【0022】
そして、伸縮式穀粒排出オーガ5は、図1に示すように、前記揚穀筒7の上部に、基部を連結し、先端部を前方へ長く延長して先端側の伸縮用移送筒2の先端部には穀粒排出口18を開口して設け、前記グレンタンク6内の穀粒を搬送し、排出できる構成としている。
【0023】
つぎに、伸縮式穀粒排出オーガ5について具体的に説明する。
まず、固定搬送筒4は、基部を前記揚穀筒7の上部に連結し、先端部を外方に延長して設け、その筒内には伸縮しない固定搬送螺旋3を内装して構成している。そして、伸縮用搬送筒2は、基部を前記固定搬送筒4の先端から外側に嵌合して摺動自在に重ね合わせて連結している。また、伸縮搬送螺旋1は、図5に示すように、伸縮用搬送筒2内において、六角軸19に軸装し、その六角軸19の先端部を前記穀粒排出口18の上方位置に軸受けして後部を固定搬送筒4側に延長して前記固定搬送螺旋3のパイプ軸20内に摺動自在に挿入して構成している。
【0024】
そして、実施例の伸縮搬送螺旋1は、図3、乃至図8に示すように、前記六角軸19に多数の螺旋単体1a,1b,1cを軸方向に摺動自在に嵌合し、相互間では間隔が調節できるように、前後に係止具を備えた構成としている。その具体構成を述べると、各螺旋単体1a,1b,1cは、前部に前側係合部が、後部に後側係合部がそれぞれ設けられ、相互に、前側の螺旋単体1aの後側係合部に、つぎの螺旋単体1bの前側係合部が係合し、該螺旋単体1bの後側係合部に、つぎの螺旋単体1cの前側係合部が係合して連結し、伸びきった状態でも離脱せず、常時、鎖状の連結状態を保つ構成となっている。
【0025】
そして、前記六角軸19は、実施例の場合、各螺旋単体1a,1b,1cを取り付けている挿通ボス筒22も内側孔を六角筒にして摺動自在に挿通し、軸の回転方向へは固定状態で伝動可能とし、軸方向には摺動自在で伸縮可能に構成している。
【0026】
つぎに、伸縮駆動装置25は、図1に示すように、前記揚穀筒7の上部に装備した伸縮制御モータ26に減速装置を介して移動螺旋軸28の基部を連結して強制駆動する構成としている。そして、移動装置30は、前記移動螺旋軸28の螺旋溝に係合している伝動ピンを介して強制的に軸方向に移動するように設け、前記伸縮用搬送筒2の基部側に一体に連結して構成している。
【0027】
そして、前記伸縮駆動装置25は、図1に示すように、伸縮式穀粒排出オーガ5の最短縮位置と最伸長位置とにそれぞれリミットセンサ31,32を設け、前記移動装置30が、リミットセンサ31、又は32に達すると、前記伸縮制御モータ26が自動停止する構成としている。
【0028】
そして、位置センサ33は、移動装置30の全移動工程の位置が検出できるように伸縮駆動装置25の内部に配置し、伸縮用搬送筒2の伸長位置が検出できる構成としている。
そして、伸縮制御モータ26は、図示は省略したが、運転席の操作パネルに設けた伸縮スイッチ34のON操作によって正転、又は逆転方向に駆動されて、移動螺旋軸28を正転、又は逆転方向に駆動する構成としている。そして、伸縮用搬送筒2は、移動螺旋軸28が正転すれば、移動装置30を介して伸長し、逆転すれば短縮方向に強制的に移動する構成としている。
【0029】
このように、伸縮用搬送筒2は、固定搬送筒4に嵌合した状態で固定搬送筒4に沿って伸び縮みして、先端部の穀粒排出口18の位置を基部側の揚穀筒11に対して遠ざけたり、近づけたり調節して穀粒の落下位置を任意に選択できる構成としている。
【0030】
そして、伸縮式穀粒排出オーガ5は、図1に示すように、油圧伸縮シリンダー35を伸縮すると基部の横軸を支点にして先端部(穀粒排出口18側)が上下方向に昇降して穀粒の排出傾斜角度の調節が可能となっている。なお、この穀粒排出傾斜角度は、排出角度設定ダイヤル36で設定できる構成としている。
【0031】
そして、穀粒排出オーガ5は、図1に示すように、下部の旋回モータ37を操作すれば、駆動ギヤ38から旋回ギヤ39を介して揚穀筒7と共に旋回させる事ができる構成となっている。そして、旋回スイッチ40は、運転席の操作パネルに設けている。
【0032】
このように、伸縮式穀粒排出オーガ5は、コンバインの上方で旋回させたり、排出傾斜角度を調節したり、伸縮調節して穀粒の排出位置を選択することができるものとなっている。
【0033】
つぎに、伸縮搬送螺旋1の伝動構成と、固定搬送螺旋3との接続、及び支持の構成について、図3、乃至図5に基づき説明する。
まず、伸縮搬送螺旋1は、挿入ボス筒22を介して六角軸19に摺動可能に支持され、その六角軸19が、固定搬送螺旋3のパイプ軸20内に挿入されて支持されている。そして、伝動パイプ軸45は、固定搬送筒4の先端部に軸受装置46によって軸受け支持されており、内部には六角軸19を貫通させ、パイプ軸20と一体に連結して伝動可能に構成している。
【0034】
なお、実施例の場合、六角軸19は、パイプ軸20に遊嵌状態に挿入され、支持されている。
そして、第二軸受装置50は、図3、図4、図9に示すように、前記伝動パイプ軸45の外側と、伸縮搬送螺旋1を固着した挿入ボス筒22に固着している伝動輪47の内側との間に構成し、固定搬送螺旋3と伸縮搬送螺旋1とを分離し、動力が伝わらないようして、伝動上、両者は、各々が独立した構成となっている。そして、伸縮搬送螺旋1は、図3、及び図5に示すように、伸縮用搬送筒2の先端、外側に設けた制御モータ9によって伝動され、固定搬送螺旋3の終端部分から搬送穀粒を受け継いで搬送できる構成としている。
【0035】
この場合、固定搬送螺旋3の終端部分と伸縮搬送螺旋1の始端部との構成は、図3に示すように、穀粒の搬送方向上手側(固定搬送螺旋3側)から下手側に穀粒が円滑に流れるように、又、藁屑等がひっかからないように上手側より下手側の外径を小径にして構成するのが望ましい。図9の構成例は、第二軸受装置50の前に巻付き防止具51を介装して藁屑等の浸入を防いだ構成としている。
【0036】
そして、前記制御モータ9は、具体的な図示は省略しているが、コンバインの車体に搭載しているバッテリーを電源として駆動する構成としている。なお、制御モータ10は、専用のバッテリーを一体に装備する構成にしても良い。
【0037】
なお、バッテリーを使用する場合、そのバッテリーの電力容量(残電力量)をモニタ等に表示して警告しながら運転できる構成にしたり、電力量が、一定以下に減少すると、制御モータ9が始動できないように牽制機構を装備すると、安全な運転ができる。
【0038】
つぎに、実施例の制御機構について、図2に基づき説明する。
まず、コントローラ53は、入力側に、排出クラッチ・スイッテ41、伸縮スイッチ34、最短リミットセンサ31、最長リミットセンサ32、旋回スイッチ40、排出角度設定ダイヤル36、穀粒センサ10、位置センサ33、自動張出スイッチ54、自動収納スイッチ55、制御モータ・スイッチ56、安全スイッチ57、緊急停止スイッチ58をそれぞれ接続し、操作情報、検出情報を入力できる構成としている。
【0039】
そして、コントローラ53は、出力側に、排出クラッチ8、伸縮制御モータ26、旋回モータ37、油圧伸縮シリンダー35、制御モータ9をそれぞれ接続して設け、出力する制御信号に基づいて制御できる構成としている。
【0040】
以上のように構成した実施例の作用について述べる。
コンバインは、グレンタンク6が満タンになると、農道に待機している穀粒運搬車両のタンクに、グレンタンク6に貯留した穀粒の搬出作業を行う。その場合、伸縮式穀粒排出オーガ5は、自動張出スイッチ54をON操作して収納した状態から排出位置に張出し作業を行う。そして、伸縮式穀粒排出オーガ5は、伸縮スイッチ34を操作して伸縮用搬送筒2を伸長しながら、穀粒運搬車両のタンクまで届かせて排出位置に穀粒排出口18を臨ませ排出作業の準備をする。
【0041】
続いて、伸縮式穀粒排出オーガ5は、排出クラッチ8を入り操作(排出クラッチ・スイッチ41をON)して、グレンタンク6内の排出螺旋軸15を伝動し、揚穀螺旋軸17、固定搬送螺旋3の順に伝動する。そして、後続する伸縮搬送螺旋1は、前記固定搬送螺旋3とは、伝動上独立しており、制御モータ・スイッチのON操作によって制御モータ9が始動され、これによって伝動される。このようにして、グレンタンク6内に貯留されている穀粒は、一連の搬送螺旋が伝動されて、運搬車両のタンクに排出される。
【0042】
そして、他の実施例における伸縮搬送螺旋1は、排出クラッチ・スイッチ41のON操作すると、関連してコントローラ53から制御モータ9に制御信号が出力されて始動され、タイミング的に固定搬送螺旋3より先に伝動される構成にして、穀粒の受継部における搬送の円滑化を図るものとしている。更に、この場合、伸縮搬送螺旋1は、前側の固定搬送螺旋3と少なくとも同一回転速度か、又は、高速で回転できるように構成している。そして、伸縮搬送螺旋1は、変速時においても、固定搬送螺旋3より低速にはならないように配慮した構成としている。
【0043】
以上のように構成することによって、実施例の伸縮搬送螺旋1は、その搬送始端部分において固定搬送螺旋3の搬送終端部からの穀粒の受継ぎ作用を、停滞することなく、円滑に受け継ぎながら搬送することができる。
【0044】
このような排出作業の途中において、例えば、穀粒運搬車両のタンクが満杯近くになって作業を中断する場合、排出クラッチ・スイッチ41をOFFにして排出クラッチ9を切り操作すると、排出螺旋軸15から固定搬送螺旋3までは停止する。しかし、制御モータ9は、駆動状態のままであるから、先端側の伸縮用搬送筒2内に軸架している伸縮搬送螺旋1は継続して駆動されている。そのとき、伸縮式穀粒排出オーガ5は、伸長した状態で筒内に搬送途中の穀粒が溜まったまま停止が、上記のように、制御モータ9によって伸縮搬送螺旋1が伝動されているから、伸縮用搬送筒2内に残留している穀粒の排出作業は継続されている。
【0045】
そして、コントローラ50は、伸縮用搬送筒2内の残留穀粒がなくなると、穀粒センサ10の検出情報に基づいて制御モータ9に制御信号を出力し、停止させ、伸縮搬送螺旋1の搬送を終了する。
【0046】
以上のように、この発明の実施例は、排出クラッチ8の切り操作による排出作業の中断後でも、継続して制御モータ9が駆動されて伸縮搬送螺旋1が駆動され、伸縮用搬送筒2内の残留穀粒をほとんど排出することができる。したがって、実施例に係る伸縮式穀粒排出オーガ5は、その後、短縮作動させても、残留穀粒の破砕もなく、伸縮搬送螺旋1の破損等も起こらず、伸縮用搬送筒2を安全に短縮して収納することができる。更に、実施例は、作業中断直後において、伸縮用搬送筒2内に残留する穀粒がほとんど排出されるから、伸縮制御モータ26を駆動しながら筒2を短縮しても、従来の如く、過負荷状態になって無理をする場面の発生もなく、故障等を未然に防止できる利点がある。
【0047】
なお、制御モータ9は、伸縮用搬送筒2内に負荷検出用センサを装備して、過負荷状態を検出できる構成とし、設定値以上の負荷を検出すれば、排出クラッチ8まで切りにできる構成にすると、装置の保護を含めて安全に搬出作業ができる。
【0048】
そして、この発明の一つの実施例として、穀粒センサ10に代えて、位置センサ33を設けた構成例も説明している。これは、伸縮用搬送筒2内に残留する穀粒量は、伸長した筒2の長さ(伸長した寸法)に比例するものと推定し、伸縮用搬送排出クラッチ8が切られた後も制御モータ9が延長駆動される時間を、伸縮用搬送筒2の伸長した寸法に応じて決めている。したがって、制御モータ9の延長駆動時間は、前記位置センサ33の検出情報に基づいて制御されるから、ほぼ実態に合っており、筒内の穀粒を残らず排出できるものとなった。
【0049】
そして、更に、他の実施例では、作業中断後、制御モータ9による延長駆動時間を、排出角度設定ダイヤル36によって設定している伸縮用搬送筒2の排出傾斜角度に基づいて、排出穀粒を持上げ搬送する場合に働く重力を考慮して設定している。この実施例の場合も、作業の実態にあっており、残留穀粒のほとんどを排出できるものとなった。
【0050】
そして、実施例では、延長駆動時間中の制御モータ9は、フル回転時の半分程度の回転速度に保ち、穀粒運搬車両のタンク(コンテナ)からの籾あふれを防止するものとしている。なお、制御モータ9は、その回転速度を伸縮用搬送筒2の伸長寸法に対応して自動変速させ、伸び量が長い場合、高速にして搬出時間を短縮すると、延長駆動時間を常に同程度にすることができる。
【0051】
なお、他の実施例として、制御モータ10は、上述の通り、伸縮搬送螺旋1を伝動するときには、低回転として安全を図る構成としているが、変速スイッチを設けて回転数を変速できる構成にすれば、排出速度が選択できて便利である。その場合、変速スイッチは、ダイヤル式、押しボタン式(押す回数によって変速する)等が考えられる。
【0052】
つぎに、伸縮式穀粒排出オーガ5について、伸縮搬送螺旋1等の破損防止や穀粒排出口18からの籾こぼれの防止、更には、装置を安全に保つために必要な実施例を説明する。
まず、伸縮式穀粒排出オーガ5は、排出クラッチ9を切り操作して、伸縮用搬送筒2内に残留穀粒がある場合には、短縮、及び伸長作動、旋回等を含めて自動収納作動ができないように牽制する機構を設けている。そして、運転席に装備しているモニタは、これを利用して伸縮用搬送筒2内に穀粒が残留している旨の表示をして、オペレーターに警告をし、安全を図る構成としている。なお、モニタには、制御モータ9による穀粒の排出中であること、更に、伸縮用搬送筒2内の残留穀粒の排出が完了すれば、その旨、表示してオペレーターに告知する構成にすると、安全で便利である。
【0053】
なお、制御モータ9は、上記実施例の中ではコントローラー53による制御信号によって始動する構成を説明したが、図2に示すように、制御モータ・スイッチ56、安全スイッチ57、緊急停止スイッチ58等と併設する構成にする事も勿論可能(実施例も装備している)である。
【0054】
そして、これらのスイッチ56、57、58は、当然、運転席にも設けてオペレータが操作できる構成にするが、コンバインの場合、補助作業者が伸縮式穀粒排出オーガ5の先端部分に近い位置に居ても容易に操作ができるように、穀粒排出口18の上部左右にも配置して取り付けた構成としている。このように、制御モータ・スイッチ56、安全スイッチ57、緊急停止スイッチ58等は、運転席のオペレーターと圃場の補助作業者の両方から自由に操作ができるようにしてとおくと、安全で便利であると共に作業能率を高めることができ、緊急時にもきわめて有効である。
【0055】
そして、制御モータ・スイッチ56と安全スイッチ57とは、図6に示すように、伸縮用搬送筒2の先端部分の両側に配置して構成すると、2つのスイッチを操作しながら袋取作業(排出される穀粒を支持杆に受けた穀粒袋に詰める作業)が容易にできる利点がある。なお、これらのスイッチ56,57,58は、押しボタン式スイッチにしたり、スイッチカバーを装備すると、誤操作が少なくすることができる。
【符号の説明】
【0056】
1 伸縮搬送螺旋
2 伸縮用搬送筒
3 固定搬送螺旋
4 固定搬送筒
5 伸縮式穀粒排出オーガ
6 グレンタンク
7 揚穀筒
8 排出クラッチ
9 制御モータ
10 穀粒センサ
【特許請求の範囲】
【請求項1】
伸縮搬送螺旋(1)を内装した伸縮用搬送筒(2)を、固定搬送螺旋(3)を内装した固定搬送筒(4)の先端側から摺動自由に重ね合わせて伸縮式穀粒排出オーガ(5)を構成し、該伸縮式穀粒排出オーガ(5)の基部をグレンタンク(6)に接続した揚穀筒(7)の上端部に横方向と上下方向とに回動自由に連結し、前記伸縮搬送螺旋(1)と固定搬送螺旋(3)の伝動を分離して互いに独立して駆動可能な構成とし、前記固定搬送螺旋(3)は排出クラッチ(8)経由の回転動力で駆動し、前記伸縮搬送螺旋(1)は伸縮用搬送筒(2)に装備した制御モータ(9)で駆動する構成とし、排出クラッチ(8)の切り操作後、制御モータ(9)によって、伸縮用搬送筒(2)内の残留穀粒がほとんど無くなるまで伸縮搬送螺旋(1)の駆動が継続される構成としたことを特徴とする伸縮式穀粒排出オーガ。
【請求項2】
前記排出クラッチ(8)の切り操作後に制御モータ(9)の駆動が継続される延長駆動状態は、前記伸縮用搬送筒(2)に装備した穀粒センサ(10)による残留穀粒の非検出情報に基づいて終了する構成としたことを特徴とする請求項1記載の伸縮式穀粒排出オーガ。
【請求項3】
前記排出クラッチ(8)の切り操作後に制御モータ(9)の駆動が継続される延長駆動時間を、前記排出クラッチ(8)の切り操作時における伸縮用搬送筒(2)の摺動位置に基づいて設定する構成としたことを特徴とする請求項1記載の伸縮式穀粒排出オーガ。
【請求項4】
前記排出クラッチ(8)の切り操作後に制御モータ(9)の駆動が継続される延長駆動時間を、穀粒排出時における伸縮用搬送筒(2)の傾斜姿勢に基づいて設定する構成としたことを特徴とする請求項1記載の伸縮式穀粒排出オーガ。
【請求項1】
伸縮搬送螺旋(1)を内装した伸縮用搬送筒(2)を、固定搬送螺旋(3)を内装した固定搬送筒(4)の先端側から摺動自由に重ね合わせて伸縮式穀粒排出オーガ(5)を構成し、該伸縮式穀粒排出オーガ(5)の基部をグレンタンク(6)に接続した揚穀筒(7)の上端部に横方向と上下方向とに回動自由に連結し、前記伸縮搬送螺旋(1)と固定搬送螺旋(3)の伝動を分離して互いに独立して駆動可能な構成とし、前記固定搬送螺旋(3)は排出クラッチ(8)経由の回転動力で駆動し、前記伸縮搬送螺旋(1)は伸縮用搬送筒(2)に装備した制御モータ(9)で駆動する構成とし、排出クラッチ(8)の切り操作後、制御モータ(9)によって、伸縮用搬送筒(2)内の残留穀粒がほとんど無くなるまで伸縮搬送螺旋(1)の駆動が継続される構成としたことを特徴とする伸縮式穀粒排出オーガ。
【請求項2】
前記排出クラッチ(8)の切り操作後に制御モータ(9)の駆動が継続される延長駆動状態は、前記伸縮用搬送筒(2)に装備した穀粒センサ(10)による残留穀粒の非検出情報に基づいて終了する構成としたことを特徴とする請求項1記載の伸縮式穀粒排出オーガ。
【請求項3】
前記排出クラッチ(8)の切り操作後に制御モータ(9)の駆動が継続される延長駆動時間を、前記排出クラッチ(8)の切り操作時における伸縮用搬送筒(2)の摺動位置に基づいて設定する構成としたことを特徴とする請求項1記載の伸縮式穀粒排出オーガ。
【請求項4】
前記排出クラッチ(8)の切り操作後に制御モータ(9)の駆動が継続される延長駆動時間を、穀粒排出時における伸縮用搬送筒(2)の傾斜姿勢に基づいて設定する構成としたことを特徴とする請求項1記載の伸縮式穀粒排出オーガ。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2011−109990(P2011−109990A)
【公開日】平成23年6月9日(2011.6.9)
【国際特許分類】
【出願番号】特願2009−270870(P2009−270870)
【出願日】平成21年11月28日(2009.11.28)
【出願人】(000000125)井関農機株式会社 (3,813)
【Fターム(参考)】
【公開日】平成23年6月9日(2011.6.9)
【国際特許分類】
【出願日】平成21年11月28日(2009.11.28)
【出願人】(000000125)井関農機株式会社 (3,813)
【Fターム(参考)】
[ Back to top ]