
余剰スラッジ自動抜出システム
【課題】処理水とスラッジとを分離させる排水処理系沈殿池におけるスラッジレベルの常時計測及び余剰スラッジの自動抜出を実現する。
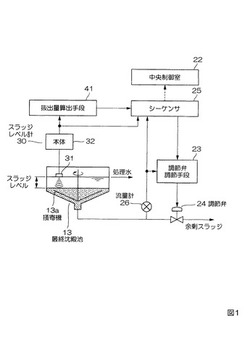
【解決手段】超音波を最終沈殿池13の底方向に所定の周期で発射し、その反射波を受信する超音波送受波器31を備え、受信した反射波から最終沈殿池13のスラッジレベルを求めるスラッジレベル計30と、スラッジレベル計30から出力されるスラッジレベルから余剰スラッジの抜出量を算出する抜出量算出手段41と、前記抜出量に基づき、最終沈殿池13に設けられている余剰スラッジ抜出用の調節弁24を調節する調整弁調節手段23とを具備する。
【解決手段】超音波を最終沈殿池13の底方向に所定の周期で発射し、その反射波を受信する超音波送受波器31を備え、受信した反射波から最終沈殿池13のスラッジレベルを求めるスラッジレベル計30と、スラッジレベル計30から出力されるスラッジレベルから余剰スラッジの抜出量を算出する抜出量算出手段41と、前記抜出量に基づき、最終沈殿池13に設けられている余剰スラッジ抜出用の調節弁24を調節する調整弁調節手段23とを具備する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は各プラントでの多種多様な製品の製造に伴って発生する様々な種類の排水を処理するシステムに関し、特に排水処理系の沈殿池における余剰スラッジの自動抜出システムに関する。
【背景技術】
【0002】
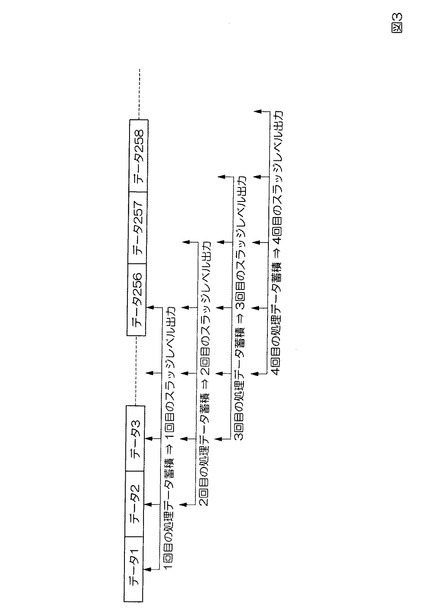
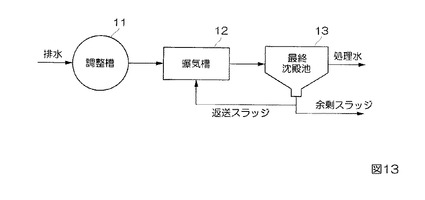
図13は一般的な排水処理系のフローを示したものである。排水処理系は調整槽11と曝気槽12と最終沈殿池13とを備えている。調整槽11では排水のpHや酸素濃度等の調整が行われる。曝気槽12では排水中に含まれる有機物を微生物と酸素の力によりスラッジ(汚泥)に変化させる活性汚泥法により排水の処理が行われる。最終沈殿池13では自然沈降により処理水(清澄水)とスラッジの分離が行われ、余剰スラッジは最終沈殿池13より系外へ排出される。また、処理水は例えば海に放流される。なお、スラッジは曝気槽12のスラッジ保有量を一定に保つために、その一部が返送スラッジとして最終沈殿池13より曝気槽12に返送される。
【0003】
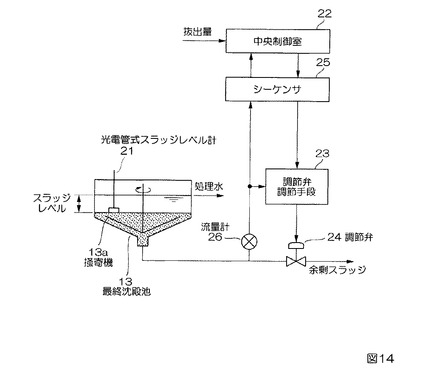
図14は上記のような排水処理系における最終沈殿池13の従来の運転管理方法(余剰スラッジの抜出方法)を示したものであり、スラッジレベルの測定は従来においては光電管式スラッジレベル計21を用いて行われていた。
【0004】
光電管式スラッジレベル計21は光電管がスラッジ界面で反応し、反応した時点でブザーが鳴る構成とされているもので、光電管を手動で最終沈殿池13内に降ろしていき、ブザーが鳴った時点で降ろした距離を計測することで、スラッジレベル(処理水の水面から処理水とスラッジの界面までの距離)を計測するものとなっている。
【0005】
運転員は光電管式スラッジレベル計21を用いて例えば1日3回スラッジレベルを測定し、測定したスラッジレベルを基に余剰スラッジの抜出量を決定する。運転員は決定した抜出量に基づき、中央制御室22より現場に設置された調節弁調節手段23をリモートコントロールする。調節弁調節手段23は入力された抜出量に対して、余剰スラッジの排出路に設けられている調節弁24の開度を調整するもので、これにより入力された抜出量に基づき、余剰スラッジが排出される。なお、この例では抜出量はシーケンサ25を通して調節弁調節手段23に入力されるものとなっており、また余剰スラッジの流量を測定する流量計26が排出路に設けられている。流量計26で測定された流量は調節弁調節手段23に入力されると共に、シーケンサ25を通して中央制御室22に送信される。
【0006】
上記においてはスラッジレベルの測定に光電管式スラッジレベル計を用いるものとなっているが、特許文献1や特許文献2にはこのようなスラッジレベルの測定と同様、液中堆積物の堆積状態の検出に超音波を用いることが記載されている。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2007−271376号公報
【特許文献2】特開平9−192411号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
ところで、図14に示したような従来の余剰スラッジ抜出方法では、スラッジレベルの測定に光電管式スラッジレベル計21を用い、運転員が例えば1日3回測定を行うものとなっているため、スラッジレベルを常時監視することはできず、よって抜出量の調整もスラッジレベルの変化に対応して即座に行われないため、余剰スラッジの適正な抜出が損なわれるといった問題があった。また、スラッジレベルを測定し、余剰スラッジの抜出量を決定して中央制御室22より調節弁調節手段24をリモートコントロールする作業は運転員の負担となっていた。
【0009】
一方、特許文献1や特許文献2に記載されているような超音波を用いる方法をスラッジレベルの測定に採用し、超音波送受波器を沈殿池に設置しておけば、スラッジレベルを常時計測することが可能となる。しかしながら、特許文献1や特許文献2は液中堆積物の検出を行うものであって、検出した堆積物の堆積状態に基づき、例えば堆積物の自動的な排出処理を可能とするシステムにはなっていない。
【0010】
この発明の目的はこのような状況に鑑み、沈殿池におけるスラッジレベルの常時計測を可能とし、かつスラッジレベルに基づいて余剰スラッジが自動的に抜出されるようにした余剰スラッジ自動抜出システムを提供することにある。
【課題を解決するための手段】
【0011】
請求項1の発明によれば、処理水とスラッジとを分離させる排水処理系沈殿池における余剰スラッジを自動で抜出するシステムは、超音波を沈殿池の底方向に所定の周期で発射し、その反射波を受信する超音波送受波器を備え、受信した反射波から沈殿池のスラッジレベルを求めるスラッジレベル計と、スラッジレベル計から出力されるスラッジレベルから余剰スラッジの抜出量を算出する抜出量算出手段と、前記抜出量に基づき、沈殿池に設けられている余剰スラッジ抜出用の調節弁を調節する調節弁調節手段とを具備する。
【0012】
請求項2の発明では請求項1の発明において、スラッジレベル計は、前記反射波から算出したスラッジレベルのデータを逐次、平均化して出力する平均化処理部と、平均化処理部から入力されるスラッジレベルのデータを処理して抜出量算出手段に出力するデータ処理部とを備え、平均化処理部から入力される入力データをX(t)(但し、tは時刻)とし、抜出量算出手段に出力する出力データをA(t)とした時、データ処理部は直前の出力データA(t−1)と入力データX(t)との差が所定値以上の時、直前の出力データA(t−1)をA(t)として出力する。
【0013】
請求項3の発明では請求項2の発明において、データ処理部は直前の出力データA(t−1)と入力データX(t)との差が所定値未満の時、
A(t)={X(t)−A(t−1)}/N+A(t−1) (但し、Nは定数)
によりA(t)を算出して出力する。
【0014】
請求項4の発明では請求項2の発明において、スラッジレベル計は平均化処理部で平均化されたスラッジレベルのデータを表示する表示部を備える。
【発明の効果】
【0015】
この発明によれば、沈殿池におけるスラッジレベルの常時計測が可能となり、そのスラッジレベルに基づいて余剰スラッジが自動的に抜出されるものとなっており、よって運転員の負担を軽減することができ、沈殿池の安全かつ安定な運転を実現することができる。
【図面の簡単な説明】
【0016】
【図1】この発明による余剰スラッジ自動抜出システムの一実施例の構成を説明するための図。
【図2】図1におけるスラッジレベル計の機能構成を示すブロック図。
【図3】スラッジレベル計の平均化処理部の処理を説明するための図。
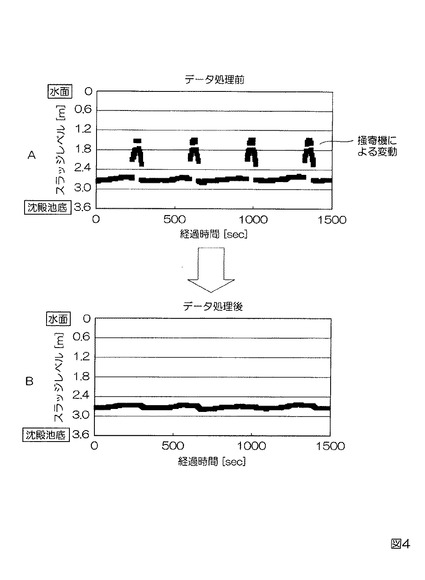
【図4】Aはスラッジレベル計のデータ処理部のデータ処理前のスラッジレベルのデータを示すグラフ、Bはそのデータ処理後のスラッジレベルのデータを示すグラフ。
【図5】データ処理部の処理フローを示すフローチャート。
【図6】図5におけるステップS1の詳細処理フローを示すフローチャート。
【図7】図5に示した処理フローによるデータ処理詳細を示す図。
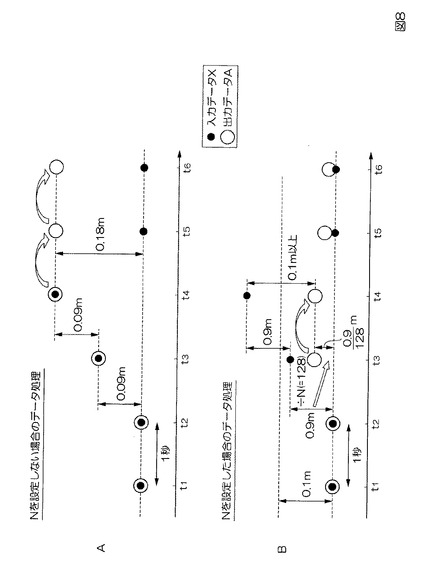
【図8】図5におけるステップS4のデータ処理詳細を比較例と共に例示した図、Aは比較例を示し、Bは実施例を示す。
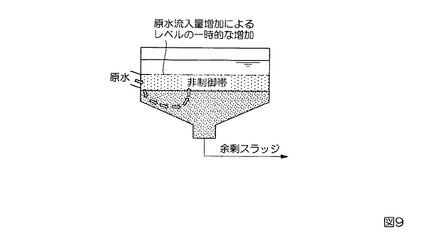
【図9】原水流入量増加によるスラッジレベルの一時的な増加を示す図。
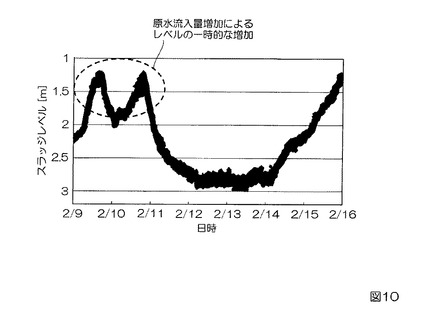
【図10】原水流入量増加によるスラッジレベルの一時的な増加を示すグラフ。
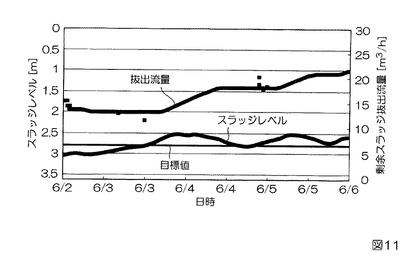
【図11】この発明による余剰スラッジ自動抜出制御の一例を示すグラフ。
【図12】スラッジレベル計の表示画面の一例を示す図。
【図13】排水処理系の全体フローを示す図。
【図14】最終沈殿池における従来の余剰スラッジ抜出方法を説明するための図。
【発明を実施するための形態】
【0017】
この発明の実施形態を図面を参照して実施例により説明する。
【0018】
図1はこの発明による余剰スラッジ自動抜出システムの構成を示したものであり、図14と対応する部分には同一符号を付してある。
【0019】
この例では最終沈殿池13のスラッジレベルの測定に超音波式のスラッジレベル計30を用いるものとなっており、スラッジレベル計30から出力されるスラッジレベルから余剰スラッジの抜出量を算出する抜出量算出手段41を備えている。
【0020】
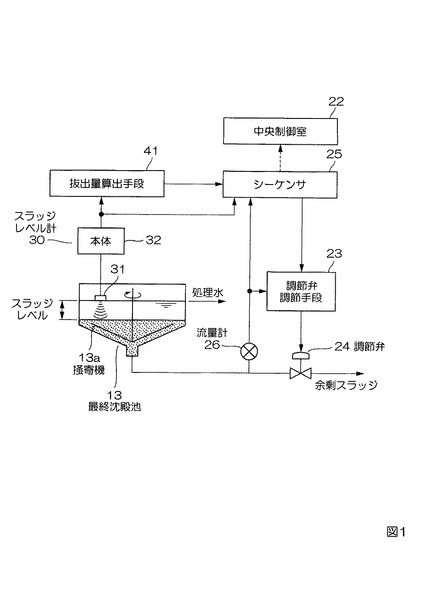
スラッジレベル計30は超音波を送受する超音波送受波器31と本体32とよりなり、本体32は図2に示したように送信部33と受信部34と制御部35と演算部36と表示部37とを具備している。演算部36はスラッジレベル算出部36aと平均化処理部36bとデータ処理部36cとよりなる。表示部37は液晶表示画面を備えている。
【0021】
超音波送受波器31は詳細図示を省略しているが、最終沈殿池13に取り付けられ、超音波を最終沈殿池13の底方向に垂直に発射し、その反射波を受信するものとなっている。超音波の発射は制御部35が送信部33にトリガパルスを供給し、トリガパルスにより動作を開始した送信部33から送信パルスが超音波送受波器31に供給されることにより行われる。
【0022】
反射波は受信部34に受信され、受信信号が受信部34から演算部36のスラッジレベル算出部36aに入力される。
【0023】
この例では超音波を所定の周期で発射し、スラッジレベルを常時計測するものとなっており、スラッジレベルを精度良く、良好に計測可能とするために、超音波の発射仕様は下記の通りとした。
【0024】
・周波数 :200kHz
・パルス幅:0.00001秒
・パルス発射回数:14.7回/秒
また、超音波送受波器31の指向角を8度とした。
【0025】
次に、スラッジレベル算出部36a、平均化処理部36b及びデータ処理部36cの各処理について説明する。
【0026】
受信部34からスラッジレベル算出部36aに入力される受信信号には最終沈殿池底、処理水とスラッジの界面、浮遊スラッジなどからの反射信号が含まれており、スラッジレベル算出部36aは超音波発射から受信までの時間、反射信号強度による識別などのデータ処理を行う。そして、データ処理により、2番目に反射信号強度が大きい反射信号の受信までの時間からスラッジレベル(処理水の水面から処理水とスラッジの界面までの距離)を求める。なお、反射信号強度が1番大きい反射信号は最終沈殿池底からの反射信号である。スラッジレベル算出部36aにおけるデータ処理(スラッジレベルの算出)はこの例では0.075秒毎に更新される。
【0027】
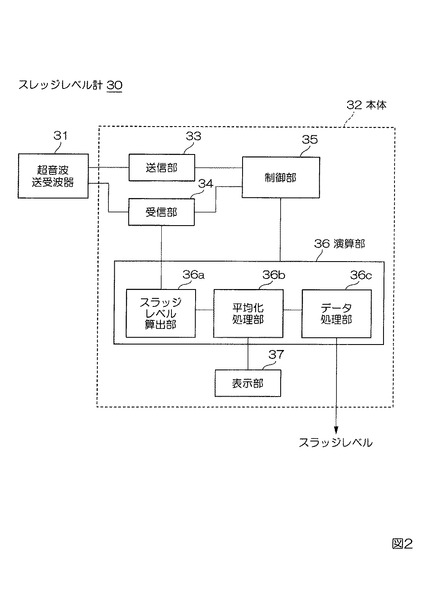
0.075秒毎に更新されるデータは誤差を多く含んでいるため、そのままスラッジレベルとして出力すると非常に不安定な値となる。従って、平均化処理部36bでは安定したデータをスラッジレベルとすべく、平均化処理を行う。図3は平均化処理のフローを例示したものであり、この例では平均化に用いるデータ数(データ処理回数)を256点としている。
【0028】
図3に示したように、データ1からデータ256までのデータを平均化して1回目のスラッジレベルを出力する。この出力には19.2秒を要する。続いて2回目のスラッジレベル出力はデータ2からデータ257までのデータを平均化する。以降、データ更新毎に256点のスラッジレベルが平均化され、出力される。平均化されたスラッジレベルのデータは表示部37に出力され、その表示画面に表示される。また、1秒毎にデータ処理部36cに平均化されたスラッジレベルのデータが出力される。なお、データ処理部36cへのスラッジレベルのデータの出力周期は、この例では1秒としているが、1秒に限定されるものではなく、スラッジレベルの大きさ、掻寄機13aの回転速度等に応じて適宜、設定される。また、平均化に用いるデータ数は上述した例では256点としているが、これに限定されるものではない。
【0029】
図4Aは平均化処理部36bからデータ処理部36cに出力されるスラッジレベルのデータの一例を示したものである。最終沈殿池13にはスラッジの平坦化を目的として図1に示したように一定速度で回転する掻寄機13aが設置されており、この掻寄機13aのアーム部が超音波送受波器31の下を所定の周期で通過するため、図4Aのデータにはアーム部を計測したことによるレベル変動が生じていることがわかる。
【0030】
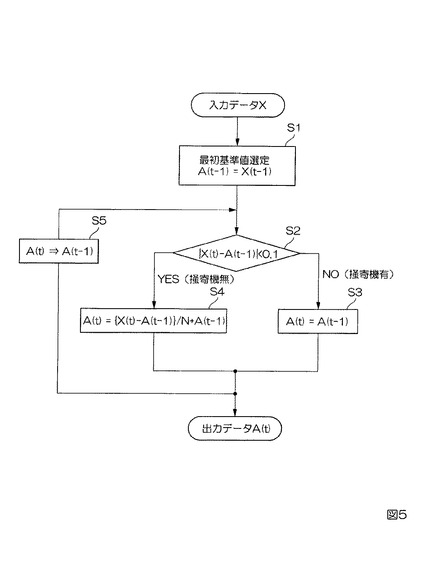
データ処理部36cではこの掻寄機13aに起因するレベル変動を取り除く処理を行う。図5はデータ処理部36cにおける処理フローを示したものであり、以下、処理フローを説明する。
【0031】
掻寄機13aの有無の判定は平均化処理部36bからデータ処理部36cに入力される最新のスラッジレベルの入力データをX(t)(但し、tは時刻)とし、データ処理部36cにおける処理により直前に、即ちこの例では1秒前に算出されたスラッジレベルの直前のデータ(出力データ)をA(t−1)とした時、これらX(t)とA(t−1)を用いて行われる。
【0032】
しかしながら、データ処理部36cが最初に処理を行う際にはA(t−1)は存在しないため、代わりのものをA(t−1)とする必要があり、そこでデータ処理部36cがデータ処理を開始する直前に、平均化処理部36bで1秒前に算出された直前のスラッジレベルの入力データX(t−1)を代わりに最初基準値A(t−1)とする(ステップS1)。
【0033】
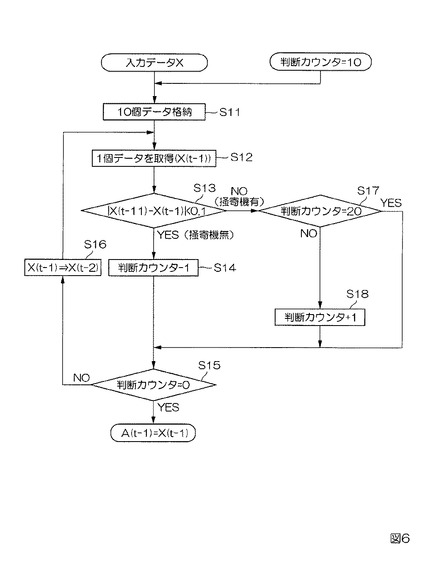
ここで、仮に掻寄機13aが通過中の入力データX(t−1)が最初基準値A(t−1)となってしまうと、以降の処理において正常にデータ処理が行われなくなってしまうため、掻寄機13aが通過していない時点でのX(t−1)をA(t−1)とする必要があり、このステップS1の最初基準値選定では図6に示したような処理を行う。以下、図6に示した処理フローを説明する。
【0034】
1秒周期で平均化処理部36bから入力されるスラッジレベルの入力データXを10個時系列で格納する(ステップS11)。続いて、平均化処理部36bから1個入力データを取得する。この入力データをX(t−1)とする(ステップS12)。入力データX(t−1)を10秒前の入力データX(t−11)と比較し、その差の絶対値が0.1mより小さいか否かを判断し(ステップS13)、0.1mより小さい時は予め10に設定されている判断カウンタを−1する(ステップS14)。そして、判断カウンタが0になったか否かを判断し(ステップS15)、0になっていない場合はX(t−1)をX(t−2)とし(ステップS16)、ステップS12に戻る。
【0035】
一方、ステップS13でX(t−1)とX(t−11)の差の絶対値が0.1m以上と判断した時は判断カウンタが20になっているか否かを判断し(ステップS17)、20になっていない場合は判断カウンタを+1し(ステップS18)、ステップS15に進む。判断カウンタが20になっている場合は判断カウンタを+1することなく、そのままステップS15に進む。
【0036】
そして、判断カウンタの値が0になるまで上記のような処理を順次繰り返し、判断カウンタの値が0になったらその時の入力データX(t−1)を最初基準値A(t−1)として選定する。判断カウンタは0になった時点を掻寄機13aが通過していないと判定するためのもので、判断カウンタは20を上限値としており、この図6に示したような処理フローを実行することにより、掻寄機13aが通過していない時点でのX(t−1)を最初基準値A(t−1)とすることができる。
【0037】
最初基準値A(t−1)の選定が完了したら、図5のステップS2へと進み、掻寄機13aの有無を判定し、データ処理を行う。
【0038】
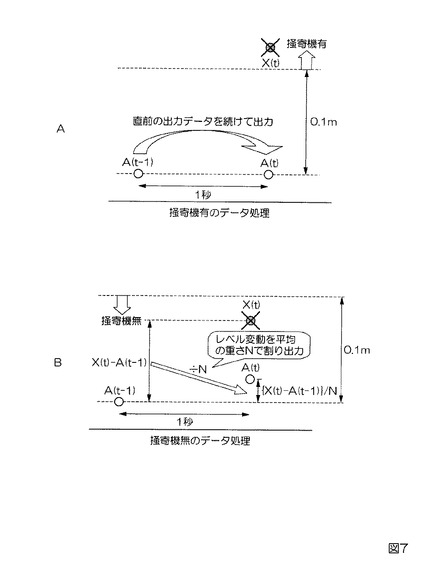
ステップS2での判定は最新の入力データX(t)と直前の出力データA(t−1)とを比較することにより行われ、差の絶対値が0.1mより小さければ掻寄機無と判断し、0.1m以上であれば掻寄機有と判断する。掻寄機有の場合は最新の入力データX(t)を無効とし、直前の出力データA(t−1)をA(t)とし(ステップS3)、再度出力する。図7Aにこの掻寄機有の場合のデータ処理を示す。
【0039】
一方、掻寄機無の場合は出力データA(t)を、
A(t)={X(t)−A(t−1)}/N+A(t−1) …(1)
により計算し(ステップS4)、出力する。ここで、Nは定数(平均の重さ)であり、例えば128とする。掻寄機無の場合のデータ処理を図7Bに示す。掻寄機無の場合はレベル変動X(t)−A(t−1)を平均の重さNで割り、その値を直前の出力データA(t−1)に加算して最新の出力データA(t)とする。
【0040】
ここで、Nを設定し、(1)式によりA(t)を求める理由について図8A,Bを参照して説明する。図8AはNを設定しない場合のデータ処理を示し、図8BはNを設定した場合のデータ処理を示す。
【0041】
入力データXに偶発的に0.09mのレベル変動が時刻t3,t4で2回続けて起ったとする。Nを設定しない場合では図8Aに示したように、入力データXと直前の出力データAとの差は0.1mより小さいため、掻寄機無と判定し、出力データAは偶発的なレベル変動が起っている入力データXを追う。
【0042】
次に、時刻t5で偶発的なレベル変動のない入力データXが入力されると、直前の出力データAとの差が0.18mとなるため、掻寄機有と判定してしまい、図7Aに示したデータ処理を行うため、出力データAは偶発的なレベル変動を追ったデータを続けて出力し、これにより正しい出力データAが得られないことになる。
【0043】
これに対し、Nを設定した場合では図7Bに示したデータ処理を行うため、時刻t3での出力データAは図8Bに示したようになり、偶発的なレベル変動の影響を抑えることができる。また、時刻t4では入力データXと直前(時刻t3)の出力データAとの差が0.1m以上になるため、仮想的に掻寄機有と判定し、図7Aに示したデータ処理により、直前の出力データAを続けて出力する。そして、時刻t5,t6では図7Bに示したデータ処理により、徐々に出力データAが入力データXへと収束する。
【0044】
このように実際のスラッジレベルの変動とは考えにくい偶発的なレベル変動が起った際、Nを設定しない場合では正しい出力データA(t)が得られなくなるのに対し、Nを設定し、(1)式により出力データA(t)を求めるようにすれば、偶発的なレベル変動が起った場合のリスクを低減させることができる。なお、Nの値は上述した例では128としているが、これに限定されるものではない。
【0045】
出力データA(t)は以上のようにして求められ、図5に示したようにA(t)をA(t−1)として(ステップS5)、出力データA(t)を求めるステップS2からステップS5の処理が繰り返し実行される。データ処理部36cではこのような処理が行われることにより、データ処理後のスラッジレベルのデータは図4Bに示したようになり、掻寄機13aに起因するレベル変動は取り除かれる。
【0046】
スラッジレベル計30で求められたスラッジレベル(出力データA(t))は抜出量算出手段41に常時、出力される。この出力は例えば1分毎に行われ、抜出量算出手段41は入力されたスラッジレベルから余剰スラッジの抜出量を算出する。算出された抜出量はシーケンサ25を通して調節弁調節手段23に入力され、調節弁調節手段23は入力された抜出量に基づき、調節弁24を調節し、これにより余剰スラッジが排出される。
【0047】
余剰スラッジの排出路には図14に示した従来例と同様、流量計26が設けられており、流量計26で測定された流量は調節弁調節手段23及びシーケンサ25に入力される。なお、スラッジレベル計30で求められたスラッジレベル、抜出量算出手段41で算出された抜出量及び流量計26で測定された流量はこの例ではシーケンサ25より中央制御室22に送信されるものとなっている。
【0048】
調節弁調節手段23による抜出量の調整はスラッジの特性上、急激なスラッジレベルの変動は起らないと考えられるため、PID制御のうち、D動作を省略したPI制御により行うものとする。ここで、図9及び図10に示したように原水流入量の増加によりスラッジレベルが一時的に増加するという最終沈殿池の現象により、PI制御をスラッジレベルに対して敏感にしすぎると、スラッジの過剰な抜出を招き、下流設備の不安定化につながる恐れがある。この現象に対応するために、PI制御を以下の通りとした。
【0049】
・スラッジの抜出過多を防止するために、P値・I値を大きくし、制御感度を鈍くした。
・スラッジレベルの一時的な増加を見越して、スラッジレベルの目標値付近に非制御帯(図9参照)を設けた。
【0050】
以上説明したような処理、制御を行うことにより、この発明による余剰スラッジ自動抜出システムではスラッジレベルを目標値付近で安定させる余剰スラッジの自動抜出システムを実現することができた。図11はこの状況を例示したものである。
【0051】
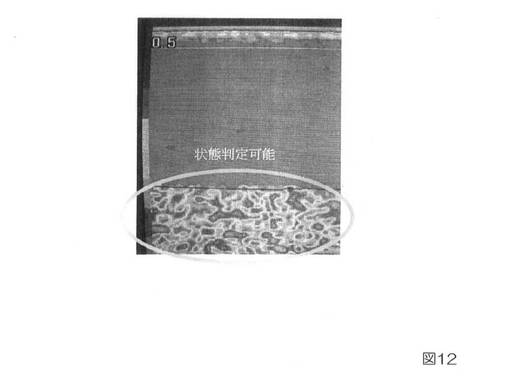
なお、超音波は密度差の大きい界面ではより強い反射をする特徴を有しているため、スラッジレベルの測定に超音波を用いるこの発明ではスラッジと処理水の界面位置のみならず、その界面の状態や沈殿スラッジの密度、沈殿池底などの最終沈殿池内の状態を知ることができる。図12はスラッジレベル計30の表示部37の表示画面の一例を示したものであり、この表示画面よりスラッジの状態判定も可能であることがわかる。
【0052】
以上、最終沈殿池を例に説明したが、この発明が適用される沈殿池は最終沈殿池に限定されない。例えば、複数の沈殿池が並列や直列に設置されているような場合には個々の沈殿池毎に独立して適用することができ、あるいは複数の沈殿池を連係させて適用することもできる。
【0053】
また、上述した例では掻寄機有無を判断する際の判断基準を0.1mとし、例えば入力データX(t)と直前の出力データA(t−1)との差が0.1m以上の時、掻寄機有と判断しているが、判断基準は0.1mに限定されず、個々の沈殿池の条件に応じて適切な値に設定される。
【技術分野】
【0001】
この発明は各プラントでの多種多様な製品の製造に伴って発生する様々な種類の排水を処理するシステムに関し、特に排水処理系の沈殿池における余剰スラッジの自動抜出システムに関する。
【背景技術】
【0002】
図13は一般的な排水処理系のフローを示したものである。排水処理系は調整槽11と曝気槽12と最終沈殿池13とを備えている。調整槽11では排水のpHや酸素濃度等の調整が行われる。曝気槽12では排水中に含まれる有機物を微生物と酸素の力によりスラッジ(汚泥)に変化させる活性汚泥法により排水の処理が行われる。最終沈殿池13では自然沈降により処理水(清澄水)とスラッジの分離が行われ、余剰スラッジは最終沈殿池13より系外へ排出される。また、処理水は例えば海に放流される。なお、スラッジは曝気槽12のスラッジ保有量を一定に保つために、その一部が返送スラッジとして最終沈殿池13より曝気槽12に返送される。
【0003】
図14は上記のような排水処理系における最終沈殿池13の従来の運転管理方法(余剰スラッジの抜出方法)を示したものであり、スラッジレベルの測定は従来においては光電管式スラッジレベル計21を用いて行われていた。
【0004】
光電管式スラッジレベル計21は光電管がスラッジ界面で反応し、反応した時点でブザーが鳴る構成とされているもので、光電管を手動で最終沈殿池13内に降ろしていき、ブザーが鳴った時点で降ろした距離を計測することで、スラッジレベル(処理水の水面から処理水とスラッジの界面までの距離)を計測するものとなっている。
【0005】
運転員は光電管式スラッジレベル計21を用いて例えば1日3回スラッジレベルを測定し、測定したスラッジレベルを基に余剰スラッジの抜出量を決定する。運転員は決定した抜出量に基づき、中央制御室22より現場に設置された調節弁調節手段23をリモートコントロールする。調節弁調節手段23は入力された抜出量に対して、余剰スラッジの排出路に設けられている調節弁24の開度を調整するもので、これにより入力された抜出量に基づき、余剰スラッジが排出される。なお、この例では抜出量はシーケンサ25を通して調節弁調節手段23に入力されるものとなっており、また余剰スラッジの流量を測定する流量計26が排出路に設けられている。流量計26で測定された流量は調節弁調節手段23に入力されると共に、シーケンサ25を通して中央制御室22に送信される。
【0006】
上記においてはスラッジレベルの測定に光電管式スラッジレベル計を用いるものとなっているが、特許文献1や特許文献2にはこのようなスラッジレベルの測定と同様、液中堆積物の堆積状態の検出に超音波を用いることが記載されている。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2007−271376号公報
【特許文献2】特開平9−192411号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
ところで、図14に示したような従来の余剰スラッジ抜出方法では、スラッジレベルの測定に光電管式スラッジレベル計21を用い、運転員が例えば1日3回測定を行うものとなっているため、スラッジレベルを常時監視することはできず、よって抜出量の調整もスラッジレベルの変化に対応して即座に行われないため、余剰スラッジの適正な抜出が損なわれるといった問題があった。また、スラッジレベルを測定し、余剰スラッジの抜出量を決定して中央制御室22より調節弁調節手段24をリモートコントロールする作業は運転員の負担となっていた。
【0009】
一方、特許文献1や特許文献2に記載されているような超音波を用いる方法をスラッジレベルの測定に採用し、超音波送受波器を沈殿池に設置しておけば、スラッジレベルを常時計測することが可能となる。しかしながら、特許文献1や特許文献2は液中堆積物の検出を行うものであって、検出した堆積物の堆積状態に基づき、例えば堆積物の自動的な排出処理を可能とするシステムにはなっていない。
【0010】
この発明の目的はこのような状況に鑑み、沈殿池におけるスラッジレベルの常時計測を可能とし、かつスラッジレベルに基づいて余剰スラッジが自動的に抜出されるようにした余剰スラッジ自動抜出システムを提供することにある。
【課題を解決するための手段】
【0011】
請求項1の発明によれば、処理水とスラッジとを分離させる排水処理系沈殿池における余剰スラッジを自動で抜出するシステムは、超音波を沈殿池の底方向に所定の周期で発射し、その反射波を受信する超音波送受波器を備え、受信した反射波から沈殿池のスラッジレベルを求めるスラッジレベル計と、スラッジレベル計から出力されるスラッジレベルから余剰スラッジの抜出量を算出する抜出量算出手段と、前記抜出量に基づき、沈殿池に設けられている余剰スラッジ抜出用の調節弁を調節する調節弁調節手段とを具備する。
【0012】
請求項2の発明では請求項1の発明において、スラッジレベル計は、前記反射波から算出したスラッジレベルのデータを逐次、平均化して出力する平均化処理部と、平均化処理部から入力されるスラッジレベルのデータを処理して抜出量算出手段に出力するデータ処理部とを備え、平均化処理部から入力される入力データをX(t)(但し、tは時刻)とし、抜出量算出手段に出力する出力データをA(t)とした時、データ処理部は直前の出力データA(t−1)と入力データX(t)との差が所定値以上の時、直前の出力データA(t−1)をA(t)として出力する。
【0013】
請求項3の発明では請求項2の発明において、データ処理部は直前の出力データA(t−1)と入力データX(t)との差が所定値未満の時、
A(t)={X(t)−A(t−1)}/N+A(t−1) (但し、Nは定数)
によりA(t)を算出して出力する。
【0014】
請求項4の発明では請求項2の発明において、スラッジレベル計は平均化処理部で平均化されたスラッジレベルのデータを表示する表示部を備える。
【発明の効果】
【0015】
この発明によれば、沈殿池におけるスラッジレベルの常時計測が可能となり、そのスラッジレベルに基づいて余剰スラッジが自動的に抜出されるものとなっており、よって運転員の負担を軽減することができ、沈殿池の安全かつ安定な運転を実現することができる。
【図面の簡単な説明】
【0016】
【図1】この発明による余剰スラッジ自動抜出システムの一実施例の構成を説明するための図。
【図2】図1におけるスラッジレベル計の機能構成を示すブロック図。
【図3】スラッジレベル計の平均化処理部の処理を説明するための図。
【図4】Aはスラッジレベル計のデータ処理部のデータ処理前のスラッジレベルのデータを示すグラフ、Bはそのデータ処理後のスラッジレベルのデータを示すグラフ。
【図5】データ処理部の処理フローを示すフローチャート。
【図6】図5におけるステップS1の詳細処理フローを示すフローチャート。
【図7】図5に示した処理フローによるデータ処理詳細を示す図。
【図8】図5におけるステップS4のデータ処理詳細を比較例と共に例示した図、Aは比較例を示し、Bは実施例を示す。
【図9】原水流入量増加によるスラッジレベルの一時的な増加を示す図。
【図10】原水流入量増加によるスラッジレベルの一時的な増加を示すグラフ。
【図11】この発明による余剰スラッジ自動抜出制御の一例を示すグラフ。
【図12】スラッジレベル計の表示画面の一例を示す図。
【図13】排水処理系の全体フローを示す図。
【図14】最終沈殿池における従来の余剰スラッジ抜出方法を説明するための図。
【発明を実施するための形態】
【0017】
この発明の実施形態を図面を参照して実施例により説明する。
【0018】
図1はこの発明による余剰スラッジ自動抜出システムの構成を示したものであり、図14と対応する部分には同一符号を付してある。
【0019】
この例では最終沈殿池13のスラッジレベルの測定に超音波式のスラッジレベル計30を用いるものとなっており、スラッジレベル計30から出力されるスラッジレベルから余剰スラッジの抜出量を算出する抜出量算出手段41を備えている。
【0020】
スラッジレベル計30は超音波を送受する超音波送受波器31と本体32とよりなり、本体32は図2に示したように送信部33と受信部34と制御部35と演算部36と表示部37とを具備している。演算部36はスラッジレベル算出部36aと平均化処理部36bとデータ処理部36cとよりなる。表示部37は液晶表示画面を備えている。
【0021】
超音波送受波器31は詳細図示を省略しているが、最終沈殿池13に取り付けられ、超音波を最終沈殿池13の底方向に垂直に発射し、その反射波を受信するものとなっている。超音波の発射は制御部35が送信部33にトリガパルスを供給し、トリガパルスにより動作を開始した送信部33から送信パルスが超音波送受波器31に供給されることにより行われる。
【0022】
反射波は受信部34に受信され、受信信号が受信部34から演算部36のスラッジレベル算出部36aに入力される。
【0023】
この例では超音波を所定の周期で発射し、スラッジレベルを常時計測するものとなっており、スラッジレベルを精度良く、良好に計測可能とするために、超音波の発射仕様は下記の通りとした。
【0024】
・周波数 :200kHz
・パルス幅:0.00001秒
・パルス発射回数:14.7回/秒
また、超音波送受波器31の指向角を8度とした。
【0025】
次に、スラッジレベル算出部36a、平均化処理部36b及びデータ処理部36cの各処理について説明する。
【0026】
受信部34からスラッジレベル算出部36aに入力される受信信号には最終沈殿池底、処理水とスラッジの界面、浮遊スラッジなどからの反射信号が含まれており、スラッジレベル算出部36aは超音波発射から受信までの時間、反射信号強度による識別などのデータ処理を行う。そして、データ処理により、2番目に反射信号強度が大きい反射信号の受信までの時間からスラッジレベル(処理水の水面から処理水とスラッジの界面までの距離)を求める。なお、反射信号強度が1番大きい反射信号は最終沈殿池底からの反射信号である。スラッジレベル算出部36aにおけるデータ処理(スラッジレベルの算出)はこの例では0.075秒毎に更新される。
【0027】
0.075秒毎に更新されるデータは誤差を多く含んでいるため、そのままスラッジレベルとして出力すると非常に不安定な値となる。従って、平均化処理部36bでは安定したデータをスラッジレベルとすべく、平均化処理を行う。図3は平均化処理のフローを例示したものであり、この例では平均化に用いるデータ数(データ処理回数)を256点としている。
【0028】
図3に示したように、データ1からデータ256までのデータを平均化して1回目のスラッジレベルを出力する。この出力には19.2秒を要する。続いて2回目のスラッジレベル出力はデータ2からデータ257までのデータを平均化する。以降、データ更新毎に256点のスラッジレベルが平均化され、出力される。平均化されたスラッジレベルのデータは表示部37に出力され、その表示画面に表示される。また、1秒毎にデータ処理部36cに平均化されたスラッジレベルのデータが出力される。なお、データ処理部36cへのスラッジレベルのデータの出力周期は、この例では1秒としているが、1秒に限定されるものではなく、スラッジレベルの大きさ、掻寄機13aの回転速度等に応じて適宜、設定される。また、平均化に用いるデータ数は上述した例では256点としているが、これに限定されるものではない。
【0029】
図4Aは平均化処理部36bからデータ処理部36cに出力されるスラッジレベルのデータの一例を示したものである。最終沈殿池13にはスラッジの平坦化を目的として図1に示したように一定速度で回転する掻寄機13aが設置されており、この掻寄機13aのアーム部が超音波送受波器31の下を所定の周期で通過するため、図4Aのデータにはアーム部を計測したことによるレベル変動が生じていることがわかる。
【0030】
データ処理部36cではこの掻寄機13aに起因するレベル変動を取り除く処理を行う。図5はデータ処理部36cにおける処理フローを示したものであり、以下、処理フローを説明する。
【0031】
掻寄機13aの有無の判定は平均化処理部36bからデータ処理部36cに入力される最新のスラッジレベルの入力データをX(t)(但し、tは時刻)とし、データ処理部36cにおける処理により直前に、即ちこの例では1秒前に算出されたスラッジレベルの直前のデータ(出力データ)をA(t−1)とした時、これらX(t)とA(t−1)を用いて行われる。
【0032】
しかしながら、データ処理部36cが最初に処理を行う際にはA(t−1)は存在しないため、代わりのものをA(t−1)とする必要があり、そこでデータ処理部36cがデータ処理を開始する直前に、平均化処理部36bで1秒前に算出された直前のスラッジレベルの入力データX(t−1)を代わりに最初基準値A(t−1)とする(ステップS1)。
【0033】
ここで、仮に掻寄機13aが通過中の入力データX(t−1)が最初基準値A(t−1)となってしまうと、以降の処理において正常にデータ処理が行われなくなってしまうため、掻寄機13aが通過していない時点でのX(t−1)をA(t−1)とする必要があり、このステップS1の最初基準値選定では図6に示したような処理を行う。以下、図6に示した処理フローを説明する。
【0034】
1秒周期で平均化処理部36bから入力されるスラッジレベルの入力データXを10個時系列で格納する(ステップS11)。続いて、平均化処理部36bから1個入力データを取得する。この入力データをX(t−1)とする(ステップS12)。入力データX(t−1)を10秒前の入力データX(t−11)と比較し、その差の絶対値が0.1mより小さいか否かを判断し(ステップS13)、0.1mより小さい時は予め10に設定されている判断カウンタを−1する(ステップS14)。そして、判断カウンタが0になったか否かを判断し(ステップS15)、0になっていない場合はX(t−1)をX(t−2)とし(ステップS16)、ステップS12に戻る。
【0035】
一方、ステップS13でX(t−1)とX(t−11)の差の絶対値が0.1m以上と判断した時は判断カウンタが20になっているか否かを判断し(ステップS17)、20になっていない場合は判断カウンタを+1し(ステップS18)、ステップS15に進む。判断カウンタが20になっている場合は判断カウンタを+1することなく、そのままステップS15に進む。
【0036】
そして、判断カウンタの値が0になるまで上記のような処理を順次繰り返し、判断カウンタの値が0になったらその時の入力データX(t−1)を最初基準値A(t−1)として選定する。判断カウンタは0になった時点を掻寄機13aが通過していないと判定するためのもので、判断カウンタは20を上限値としており、この図6に示したような処理フローを実行することにより、掻寄機13aが通過していない時点でのX(t−1)を最初基準値A(t−1)とすることができる。
【0037】
最初基準値A(t−1)の選定が完了したら、図5のステップS2へと進み、掻寄機13aの有無を判定し、データ処理を行う。
【0038】
ステップS2での判定は最新の入力データX(t)と直前の出力データA(t−1)とを比較することにより行われ、差の絶対値が0.1mより小さければ掻寄機無と判断し、0.1m以上であれば掻寄機有と判断する。掻寄機有の場合は最新の入力データX(t)を無効とし、直前の出力データA(t−1)をA(t)とし(ステップS3)、再度出力する。図7Aにこの掻寄機有の場合のデータ処理を示す。
【0039】
一方、掻寄機無の場合は出力データA(t)を、
A(t)={X(t)−A(t−1)}/N+A(t−1) …(1)
により計算し(ステップS4)、出力する。ここで、Nは定数(平均の重さ)であり、例えば128とする。掻寄機無の場合のデータ処理を図7Bに示す。掻寄機無の場合はレベル変動X(t)−A(t−1)を平均の重さNで割り、その値を直前の出力データA(t−1)に加算して最新の出力データA(t)とする。
【0040】
ここで、Nを設定し、(1)式によりA(t)を求める理由について図8A,Bを参照して説明する。図8AはNを設定しない場合のデータ処理を示し、図8BはNを設定した場合のデータ処理を示す。
【0041】
入力データXに偶発的に0.09mのレベル変動が時刻t3,t4で2回続けて起ったとする。Nを設定しない場合では図8Aに示したように、入力データXと直前の出力データAとの差は0.1mより小さいため、掻寄機無と判定し、出力データAは偶発的なレベル変動が起っている入力データXを追う。
【0042】
次に、時刻t5で偶発的なレベル変動のない入力データXが入力されると、直前の出力データAとの差が0.18mとなるため、掻寄機有と判定してしまい、図7Aに示したデータ処理を行うため、出力データAは偶発的なレベル変動を追ったデータを続けて出力し、これにより正しい出力データAが得られないことになる。
【0043】
これに対し、Nを設定した場合では図7Bに示したデータ処理を行うため、時刻t3での出力データAは図8Bに示したようになり、偶発的なレベル変動の影響を抑えることができる。また、時刻t4では入力データXと直前(時刻t3)の出力データAとの差が0.1m以上になるため、仮想的に掻寄機有と判定し、図7Aに示したデータ処理により、直前の出力データAを続けて出力する。そして、時刻t5,t6では図7Bに示したデータ処理により、徐々に出力データAが入力データXへと収束する。
【0044】
このように実際のスラッジレベルの変動とは考えにくい偶発的なレベル変動が起った際、Nを設定しない場合では正しい出力データA(t)が得られなくなるのに対し、Nを設定し、(1)式により出力データA(t)を求めるようにすれば、偶発的なレベル変動が起った場合のリスクを低減させることができる。なお、Nの値は上述した例では128としているが、これに限定されるものではない。
【0045】
出力データA(t)は以上のようにして求められ、図5に示したようにA(t)をA(t−1)として(ステップS5)、出力データA(t)を求めるステップS2からステップS5の処理が繰り返し実行される。データ処理部36cではこのような処理が行われることにより、データ処理後のスラッジレベルのデータは図4Bに示したようになり、掻寄機13aに起因するレベル変動は取り除かれる。
【0046】
スラッジレベル計30で求められたスラッジレベル(出力データA(t))は抜出量算出手段41に常時、出力される。この出力は例えば1分毎に行われ、抜出量算出手段41は入力されたスラッジレベルから余剰スラッジの抜出量を算出する。算出された抜出量はシーケンサ25を通して調節弁調節手段23に入力され、調節弁調節手段23は入力された抜出量に基づき、調節弁24を調節し、これにより余剰スラッジが排出される。
【0047】
余剰スラッジの排出路には図14に示した従来例と同様、流量計26が設けられており、流量計26で測定された流量は調節弁調節手段23及びシーケンサ25に入力される。なお、スラッジレベル計30で求められたスラッジレベル、抜出量算出手段41で算出された抜出量及び流量計26で測定された流量はこの例ではシーケンサ25より中央制御室22に送信されるものとなっている。
【0048】
調節弁調節手段23による抜出量の調整はスラッジの特性上、急激なスラッジレベルの変動は起らないと考えられるため、PID制御のうち、D動作を省略したPI制御により行うものとする。ここで、図9及び図10に示したように原水流入量の増加によりスラッジレベルが一時的に増加するという最終沈殿池の現象により、PI制御をスラッジレベルに対して敏感にしすぎると、スラッジの過剰な抜出を招き、下流設備の不安定化につながる恐れがある。この現象に対応するために、PI制御を以下の通りとした。
【0049】
・スラッジの抜出過多を防止するために、P値・I値を大きくし、制御感度を鈍くした。
・スラッジレベルの一時的な増加を見越して、スラッジレベルの目標値付近に非制御帯(図9参照)を設けた。
【0050】
以上説明したような処理、制御を行うことにより、この発明による余剰スラッジ自動抜出システムではスラッジレベルを目標値付近で安定させる余剰スラッジの自動抜出システムを実現することができた。図11はこの状況を例示したものである。
【0051】
なお、超音波は密度差の大きい界面ではより強い反射をする特徴を有しているため、スラッジレベルの測定に超音波を用いるこの発明ではスラッジと処理水の界面位置のみならず、その界面の状態や沈殿スラッジの密度、沈殿池底などの最終沈殿池内の状態を知ることができる。図12はスラッジレベル計30の表示部37の表示画面の一例を示したものであり、この表示画面よりスラッジの状態判定も可能であることがわかる。
【0052】
以上、最終沈殿池を例に説明したが、この発明が適用される沈殿池は最終沈殿池に限定されない。例えば、複数の沈殿池が並列や直列に設置されているような場合には個々の沈殿池毎に独立して適用することができ、あるいは複数の沈殿池を連係させて適用することもできる。
【0053】
また、上述した例では掻寄機有無を判断する際の判断基準を0.1mとし、例えば入力データX(t)と直前の出力データA(t−1)との差が0.1m以上の時、掻寄機有と判断しているが、判断基準は0.1mに限定されず、個々の沈殿池の条件に応じて適切な値に設定される。
【特許請求の範囲】
【請求項1】
処理水とスラッジとを分離させる排水処理系沈殿池における余剰スラッジを自動で抜出するシステムであって、
超音波を前記沈殿池の底方向に所定の周期で発射し、その反射波を受信する超音波送受波器を備え、受信した反射波から前記沈殿池のスラッジレベルを求めるスラッジレベル計と、
前記スラッジレベル計から出力されるスラッジレベルから余剰スラッジの抜出量を算出する抜出量算出手段と、
前記抜出量に基づき、前記沈殿池に設けられている余剰スラッジ抜出用の調節弁を調節する調節弁調節手段とを具備することを特徴とする余剰スラッジ自動抜出システム。
【請求項2】
請求項1記載の余剰スラッジ自動抜出システムにおいて、
前記スラッジレベル計は、
前記反射波から算出したスラッジレベルのデータを逐次、平均化して出力する平均化処理部と、
前記平均化処理部から入力されるスラッジレベルのデータを処理して前記抜出量算出手段に出力するデータ処理部とを備え、
前記平均化処理部から入力される入力データをX(t)(但し、tは時刻)とし、前記抜出量算出手段に出力する出力データをA(t)とした時、前記データ処理部は直前の出力データA(t−1)と入力データX(t)との差が所定値以上の時、直前の出力データA(t−1)をA(t)として出力することを特徴とする余剰スラッジ自動抜出システム。
【請求項3】
請求項2記載の余剰スラッジ自動抜出システムにおいて、
前記データ処理部は直前の出力データA(t−1)と入力データX(t)との差が所定値未満の時、
A(t)={X(t)−A(t−1)}/N+A(t−1) (但し、Nは定数)
によりA(t)を算出して出力することを特徴とする余剰スラッジ自動抜出システム。
【請求項4】
請求項2記載の余剰スラッジ自動抜出システムにおいて、
前記スラッジレベル計は前記平均化処理部で平均化されたスラッジレベルのデータを表示する表示部を備えることを特徴とする余剰スラッジ自動抜出システム。
【請求項1】
処理水とスラッジとを分離させる排水処理系沈殿池における余剰スラッジを自動で抜出するシステムであって、
超音波を前記沈殿池の底方向に所定の周期で発射し、その反射波を受信する超音波送受波器を備え、受信した反射波から前記沈殿池のスラッジレベルを求めるスラッジレベル計と、
前記スラッジレベル計から出力されるスラッジレベルから余剰スラッジの抜出量を算出する抜出量算出手段と、
前記抜出量に基づき、前記沈殿池に設けられている余剰スラッジ抜出用の調節弁を調節する調節弁調節手段とを具備することを特徴とする余剰スラッジ自動抜出システム。
【請求項2】
請求項1記載の余剰スラッジ自動抜出システムにおいて、
前記スラッジレベル計は、
前記反射波から算出したスラッジレベルのデータを逐次、平均化して出力する平均化処理部と、
前記平均化処理部から入力されるスラッジレベルのデータを処理して前記抜出量算出手段に出力するデータ処理部とを備え、
前記平均化処理部から入力される入力データをX(t)(但し、tは時刻)とし、前記抜出量算出手段に出力する出力データをA(t)とした時、前記データ処理部は直前の出力データA(t−1)と入力データX(t)との差が所定値以上の時、直前の出力データA(t−1)をA(t)として出力することを特徴とする余剰スラッジ自動抜出システム。
【請求項3】
請求項2記載の余剰スラッジ自動抜出システムにおいて、
前記データ処理部は直前の出力データA(t−1)と入力データX(t)との差が所定値未満の時、
A(t)={X(t)−A(t−1)}/N+A(t−1) (但し、Nは定数)
によりA(t)を算出して出力することを特徴とする余剰スラッジ自動抜出システム。
【請求項4】
請求項2記載の余剰スラッジ自動抜出システムにおいて、
前記スラッジレベル計は前記平均化処理部で平均化されたスラッジレベルのデータを表示する表示部を備えることを特徴とする余剰スラッジ自動抜出システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図13】
【図14】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図13】
【図14】
【図12】
【公開番号】特開2011−104510(P2011−104510A)
【公開日】平成23年6月2日(2011.6.2)
【国際特許分類】
【出願番号】特願2009−261870(P2009−261870)
【出願日】平成21年11月17日(2009.11.17)
【出願人】(000002004)昭和電工株式会社 (3,251)
【出願人】(000001177)株式会社光電製作所 (32)
【公開日】平成23年6月2日(2011.6.2)
【国際特許分類】
【出願日】平成21年11月17日(2009.11.17)
【出願人】(000002004)昭和電工株式会社 (3,251)
【出願人】(000001177)株式会社光電製作所 (32)
[ Back to top ]