
作業車両の四輪駆動制御装置
【課題】本発明は、2WDから4WDに自動的に変更することで、安定して走行をすることを課題とする。
【解決手段】走行装置94が後輪32のみで駆動する2WDで走行中にアクセルペダル18を踏み込み操作から解除してエンジン回転をアイドリング状態にしたにも拘らず、走行速度センサ187が速度低下を示さない場合に、走行装置94の駆動を4WDに変更することを特徴とする作業車両の四輪駆動制御装置とする。また、走行速度が所定速度以上で走行装置94の駆動を4WDに変更することを特徴とする作業車両の四輪駆動制御装置とする。また、主変速レバー14或いは副変速レバー15を所定の増速段以上に変速している場合に、走行装置94の駆動を2WDから4WDに変更することを特徴とする作業車両の四輪駆動制御装置とする。
【解決手段】走行装置94が後輪32のみで駆動する2WDで走行中にアクセルペダル18を踏み込み操作から解除してエンジン回転をアイドリング状態にしたにも拘らず、走行速度センサ187が速度低下を示さない場合に、走行装置94の駆動を4WDに変更することを特徴とする作業車両の四輪駆動制御装置とする。また、走行速度が所定速度以上で走行装置94の駆動を4WDに変更することを特徴とする作業車両の四輪駆動制御装置とする。また、主変速レバー14或いは副変速レバー15を所定の増速段以上に変速している場合に、走行装置94の駆動を2WDから4WDに変更することを特徴とする作業車両の四輪駆動制御装置とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、トラクター等の作業車両において、二輪駆動と四輪駆動を自動的に切り換える四輪駆動制御装置に関する。
【背景技術】
【0002】
四輪走行作業車両は、走行負荷を軽減するために平地を2WDで走行するが、車輪のスリップを検出してスリップが生じると二輪駆動(2WD)で走行していても四輪駆動(4WD)に自動的に切り換える制御が行われる。
【0003】
例えば、特開平6−107012号公報には、2WD走行中の急な下り坂で、変速機構を低速の変速状態にして走行していても、地面が滑りやすくて駆動輪である後車輪の走行速度以上に機体が走行した場合、前車輪のオーバーランを前後軸回転センサで判定し、制御手段であるコントローラにより前後輪駆動(4WD)に変更制御して暴走を防ぐ。そして、この変更制御動作が、例えば30秒間に6回以上行われる走行状態の場合には、常時4WDに固定して走行するように制御する。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平6−107012号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
前記の如く、従来技術は、前車輪のオーバーランを前後軸回転センサで判定して4WDに変更制御しているが、このような前車輪のオーバーランが生じない状態で下り坂を走行している場合でも2WDでは停止距離が4WDの場合よりも長くなって、4WD走行に慣れたオペレータがブレーキを踏み込むタイミングが遅れて停止距離が伸びて危険な状態になる場合が有る。
【0006】
本発明は、前車輪のオーバーランが生じなくても下り坂走行を検出して自動的に4WDとすることで、停止距離が長くなる下り坂走行でも4WD走行の感覚で操縦可能な四輪走行作業車両の四輪駆動制御装置とすることを課題とする。
【課題を解決するための手段】
【0007】
上記本発明の課題は、次の技術手段により解決される。
請求項1に記載の発明は、走行装置(94)が後輪(32)のみで駆動する2WDで走行中にアクセルペダル(18)を踏み込み操作から解除してエンジン回転をアイドリング状態にしたにも拘らず、走行速度センサ(187)が速度低下を示さない場合に、走行装置(94)の駆動を4WDに変更することを特徴とする作業車両の四輪駆動制御装置とする。
【0008】
この構成では、2WDで走行中にアクセルペダル18を踏み込み操作から解除してエンジン回転をアイドリング状態にすれば駆動力が無くなって走行速度を低下する筈であるが、走行速度が低下しないので下り坂の走行中であると判断して4WDに変更して、制動した際の停止距離を長くすることなく4WD走行の感覚で機体を停止出来る。
【0009】
請求項2に記載の発明は、走行速度が所定速度以上で走行装置(94)の駆動を4WDに変更することを特徴とする請求項1に記載の作業車両の四輪駆動制御装置とする。
この構成で、所定速度以上で走行している場合に走行停止距離が大きく伸びるので、走行装置94を2WDから4WDに変更して、思った以上に停止距離を長くすることなく4WD走行の感覚で機体を停止出来る。
【0010】
請求項3に記載の発明は、主変速レバー(14)或いは副変速レバー(15)を所定の増速段以上に変速している場合に、走行装置(94)の駆動を2WDから4WDに変更することを特徴とする請求項1に記載の作業車両の四輪駆動制御装置とする。
【0011】
この構成で、主変速レバー14或いは副変速レバー15が所定の増速段以上に変速してエンジンブレーキが働き難く走行停止距離が長くなる場合のみ、4WDで停止距離を長くすることなく4WD走行の感覚で停止距離を短く出来る。
【0012】
請求項4に記載の発明は、ステアリングハンドル(7)の旋回角が所定旋回角以下の場合に、走行装置(94)の駆動を4WDに変更することを特徴とする請求項1から請求項3のどれか1項に記載の作業車両の四輪駆動制御装置する。
【0013】
この構成で、ステアリングハンドル7の旋回角が所定旋回角以下の場合には走行速度が速いままで旋回することが多く、その場合にも停止距離を長くすることなく4WD走行の感覚で機体を停止出来る。
【発明の効果】
【0014】
請求項1に記載の発明で、2WDで走行中にアクセルペダル18を踏み込み操作から解除してエンジン回転をアイドリング状態にすれば駆動力が無くなって走行速度を低下する筈であるが、走行速度が低下しないと下り坂の走行中であると判断して4WDに変更して、制動した際の停止距離を長くすることなく4WD走行の感覚で機体を停止出来る。
【0015】
請求項2に記載の発明で、所定速度以上で走行している場合に走行停止距離が伸びるので、走行装置94を2WDから4WDに変更して、思った以上に停止距離を長くすることなく4WD走行の感覚で機体を停止出来る。
【0016】
請求項3に記載の発明で、主変速レバー14或いは副変速レバー15が所定の増速段以上に変速してエンジンブレーキが働き難い場合のみ、停止距離を長くすることなく4WD走行の感覚で機体を停止出来る。
【0017】
請求項4に記載の発明で、ステアリングハンドル7の旋回角が所定旋回角以下の場合には走行速度が速くなることが多く、その場合に停止距離を長くすることなく4WD走行の感覚で機体を停止出来る。
【図面の簡単な説明】
【0018】
【図1】本発明の作業車両として示すトラクターの全体側面図である。
【図2】エンジンから前後輪及びPTO軸への動力伝動線図である。
【図3】ミッションケースの一部拡大断面展開図である。
【図4】自動制御ブロック図である。
【図5】メータパネルの正面図である。
【発明を実施するための形態】
【0019】
作業車両の一例としてトラクターにおける実施例を以下に説明する。
なお、本明細書において作業車両の前進方向に向かって左右方向をそれぞれ左、右といい、前進方向を前、後進方向を後という。
【0020】
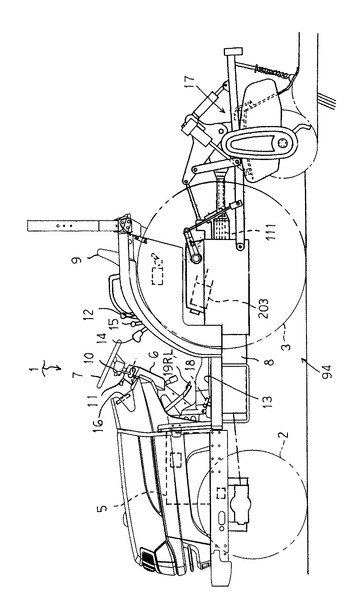
トラクター1は、図1に示す如く、機体の前後部に前輪2,2と後輪3,3を備え、機体の前部に搭載したエンジン5のエンジン出力軸20の回転をミッションケース8内の変速装置によって適宜減速して、これら前輪2,2と後輪3,3に伝えるように構成している。
【0021】
機体中央でのハンドルポスト6にはステアリングハンドル7が設けられ、その後方にはシート9が設けられている。ステアリングハンドル7の下方には、機体の進行方向を前後方向に切り換える前後進レバー10が設けられている。この前後進レバー10を前側にシフトすると機体は前進し、後側へシフトすると後進する構成である。
【0022】
また、ハンドルポスト6を挟んで前後進レバー10の反対側にはエンジン回転数を調節するアクセルレバー11が設けられ、またステップフロア13の右コーナー部には、同様にエンジン回転数を調節するアクセルペダル18と、左右の後輪3,3にブレーキを作動させる左右のブレーキペダル19R,19Lが設けられている。
【0023】
ハンドルポスト6上部のステアリングハンドル7の前側にメータパネル16が設けられて、走行速度等の機体状況が表示される。
また、一速から八速まで変速する主変速レバー14はシート9の左前側部にあり、超低速、低速、中速、高速の四段及び中立のいずれかの位置を選択できる副変速レバー15はその後方にあり、さらにその右側に四段に変速するPTO変速レバー12を設けている。
【0024】
トラクター1の機体後部には、ロータリ作業機17を装着して、ミッションケース8から後方へ突出するPTO出力軸111で駆動するようにしている。
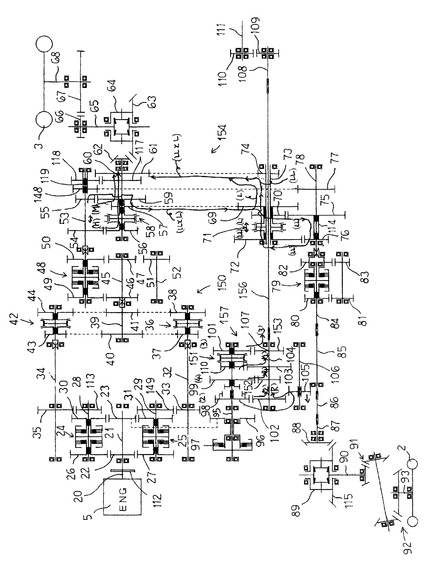
図2は、ミッションケース8内の変速装置の動力伝動機構を示す伝動線図で、エンジン5から前輪2と後輪3及びロータリ作業機17へのPTO出力軸111への変速伝動機構を説明する。
【0025】
エンジン5のエンジン出力軸20の回転がメインクラッチ112を介して入力軸21に伝動され、この入力軸21に固着の第一入力ギヤ22と第二入力ギヤ23がそれぞれ第一高・低クラッチ24の第一低速ギヤ26と第二高・低クラッチ25の第二低速ギヤ27及び第一高・低クラッチ24の第一高速ギヤ30と第二高・低クラッチ25の第二高速ギヤ31に噛み合って回転を伝動している。
【0026】
そして、第一高・低クラッチ24を第一低速ギヤ26側に繋ぐと第一低速ギヤ26から第一クラッチ軸28に伝動され、第一高速ギヤ30側に繋ぐと第一高速ギヤ30から第一クラッチ軸28に伝動され、第二高・低クラッチ25を第二低速ギヤ27側に繋ぐと第二低速ギヤ27から第二クラッチ軸29に伝動され、第二高速ギヤ31側に繋ぐと第二高速ギヤ31から第二クラッチ軸29に伝動される。
【0027】
第一高・低クラッチ24と第二高・低クラッチ25は同一の油圧多板クラッチで、それぞれ入力軸21の回転を同一減速比で高・低の二段に減速して第一クラッチ軸28と第二クラッチ軸29に伝動することになる。
【0028】
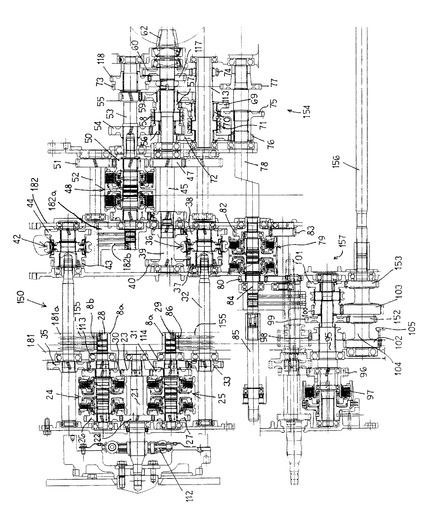
また、図3に示す如く、第一クラッチ軸28と第二クラッチ軸29をミッションケース8に支持する前仕切壁181に形成した肉盛部181aにケースの左右開口部側からドリルで加工した給油孔8bを設けて、この給油孔8bから第一高・低クラッチ24と第二高・低クラッチ25の軸に給油している。
【0029】
図2に戻って、第一クラッチ軸28に固着の第一ギヤ113が低速伝動軸34に固着の第二ギヤ35と噛み合って減速して伝動され、第二クラッチ軸29に固着の第三ギヤ149が高速伝動軸32に固着の第四ギヤ33と噛み合って増速して伝動される。
【0030】
ここまでの変速伝動で、低速伝動軸34が低速で二段に、高速伝動軸32が高速で二段にそれぞれ変速されることで、計四段に変速されることになる。
低速伝動軸34と高速伝動軸32の回転がそれぞれ第一シンクロチェンジ42と第二シンクロチェンジ36に伝動され、第一シンクロチェンジ42の第一シンクロ小ギヤ43と第二シンクロチェンジ36の第二シンクロ小ギヤ37が第一伝動軸39の第五ギヤ40と噛み合い、第一シンクロチェンジ42の第一シンクロ大ギヤ44と第二シンクロチェンジ36の第二シンクロ大ギヤ38が第一伝動軸39の第六ギヤ41と噛み合って伝動する。
【0031】
第一シンクロチェンジ42の第一シンクロ小ギヤ43と第一シンクロギヤ大44及び第二シンクロチェンジ36の第二シンクロ小ギヤ37と第二シンクロ大ギヤ38は、全く同一のギヤで、低速伝動軸34が低速回転し高速伝動軸32が高速回転しているので、第一シンクロチェンジ42を切換えると低速でさらに二段に変速され、第二シンクロチェンジ36を切換えると高速でさらに二段に変速される。すなわち、第一入力軸21の回転が第一伝動軸39で低速四段と高速四段に変速されることになる。
【0032】
ここまでの主変速部150で、操縦者が操作する主変速レバー14の変速位置を読み取って、走行系ECU120で自動的に第一・第二高・低油圧多板クラッチ24,25と第一・第二シンクロチェンジ36,42を制御して低速四段と高速四段まで変速される。
【0033】
さらに、第一伝動軸39は第二伝動軸45に軸連結で連結されている。この第二伝動軸45には、第七ギヤ46と第八ギヤ47が固着され、油圧多板の正逆クラッチ48の正転クラッチギヤ49と逆転軸52の逆転ギヤ51に噛み合わされ、逆転ギヤ51が正逆クラッチ48の逆転クラッチギヤ50と噛み合っている。
【0034】
従って、正逆クラッチ48を正転クラッチギヤ49に繋ぐと、正転状態で正逆クラッチ48に連結の副変速軸53に伝動され、正逆クラッチ48を逆転クラッチギヤ50に繋ぐと、逆転状態で副変速軸53に伝動される。正転と逆転では減速比が異なり、逆転の方が低速になる。
【0035】
次に、副変速部154を説明する。
副変速軸53には第九ギヤ54と第十ギヤ55が固着され、それぞれ第三シンクロチェンジ58の第三シンクロ大ギヤ56と第三シンクロ小ギヤ59に噛み合っている。従って、第三シンクロチェンジ58を第三シンクロ大ギヤ56側に繋ぐと第九ギヤ54から第三シンクロ大ギヤ56に伝動した回転で第5伝動軸60が増速して高速で駆動され、第三シンクロチェンジ58を第三シンクロ小ギヤ59側に繋ぐと第十ギヤ55から第三シンクロ小ギヤ59に伝動した回転で第五伝動軸60が減速して中速で駆動される。
【0036】
さらに、第三シンクロチェンジ58の第三シンクロ小ギヤ59側には第十一ギヤ57を固着して、第四シンクロチェンジ71の第四シンクロ小ギヤ69と噛み合っている。そして、第四シンクロ小ギヤ69側には第十五ギヤ70を固着し、この第十五ギヤ70が第二筒軸114の第十七ギヤ75と噛み合って第二筒軸114に固着の第十八ギヤ76から第四シンクロ大ギヤ72に伝動している。第四シンクロチェンジ71を装着した第一筒軸73には、第十六ギヤ74を固着している。
【0037】
従って、第三シンクロチェンジ58を中立にすると、第十ギヤ55の回転が第三シンクロ小ギヤ59に伝動され、第三シンクロ小ギヤ59側に固着の第十一ギヤ57から第四シンクロ小ギヤ69に伝動される。
【0038】
この状態で、第四シンクロチェンジ71を第四シンクロ小ギヤ69側に繋ぐと、第四シンクロ小ギヤ69の回転が第十六ギヤ74の回転となって低速となり、第四シンクロチェンジ71を第四シンクロ大ギヤ72側に繋ぐと第四シンクロ小ギヤ69の回転が第十五ギヤ70から第十七ギヤ75と第十八ギヤ76と第四シンクロ大ギヤ72に伝動されて第十六ギヤ74が極低速となる。
【0039】
なお、第三シンクロチェンジ58を第三シンクロ大ギヤ56側或いは第三シンクロ小ギヤ59側に繋ぐ場合には、第四シンクロチェンジ71を中立にしておく。
従って、主変速部150変速された副変速軸53の低速四段と高速四段が、副変速部154で四段に変速されることで、低速十六段と高速十六段に変速されることになる。
【0040】
さらに、第十六ギヤ74は前記第5伝動軸60に固着の第十二ギヤ61と噛み合って第5伝動軸60を駆動する。この第5伝動軸60の軸端に固着の第一ベベルギヤ62がリアベベルケース64の第二ベベルギヤ63と噛み合っていて、リアベベルケース64のベベル出力軸65から第十三ギヤ66と第十四ギヤ67を介して後輪出力軸68を回転して後輪3を駆動する。
【0041】
また、第5伝動軸60には第二十一ギヤ117が固着され、副変速軸53に軸支された第三筒軸119に固着の第二十二ギヤ118と第二十二ギヤ148を介して第一前輪駆動軸78の第十九ギヤ77に伝動して、前記第十六ギヤ74の低速十六段と高速十六段の回転が第一前輪駆動軸78に伝動されている。
【0042】
この第一前輪駆動軸78から前輪増速クラッチ79を介して第二前輪駆動軸84に伝動し、第三前輪駆動軸85と第四前輪駆動軸86と前輪駆動ベベル軸87に引き継いで伝動し、前輪駆動ベベル軸87の軸端に固着の第一前ベベルギヤ88が前ベベルケース89の第二前ベベルギヤ115と噛み合っていて、前ベベルケース89の前ベベル出力軸90から第一前ベベルギヤ組91と前縦軸116と第二前ベベルギヤ組92を介して前輪出力軸93を回転して前輪2を駆動する。
【0043】
前輪増速クラッチ79を切った状態で後輪3の二輪を駆動する2WDになり、前輪増速クラッチ79を第一増速クラッチギヤ82側に繋いだり第二増速クラッチギヤ80に繋いだりするとそれぞれ第一増速ギヤ83と第二増速ギヤ81に噛み合って増速率を変更して前輪2も駆動する4WDとなる。
【0044】
ここまでの副変速部154が副変速レバー15の変速位置を読み取って、走行系ECU120で自動的に第三シンクロチェンジ58と第四シンクロチェンジ71を制御して変速される。
【0045】
また、第四シンクロチェンジ71を装着した第一筒軸73は、第三シンクロチェンジ58を装着した第5伝動軸60の下側に配置され、ミッションケース8の長さを短くしている。
【0046】
次に、PTO出力軸111の伝動経路を説明する。
前記第二入力ギヤ23にPTOメインクラッチ97のメインクラッチギヤ96を噛み合わせて、PTOメインクラッチ97で動力の断続を行うようにしている。
【0047】
PTOメインクラッチ97を装着した第一PTO軸95には、次の如く、PTO変速部157が設けられている。
第一PTOギヤ98と第二PTOギヤ99と第五シンクロチェンジ151の第五シンクロ小ギヤ100と第五シンクロ大ギヤ101を装着し、第二PTO軸104に第二十ギヤ102と第二十三ギヤ152と第二十一ギヤ103と第二十四ギヤ153を固着し、カウンタ軸106にPTO逆転ギヤ105を軸支している。
【0048】
第一PTOギヤ98をスライドして第二十ギヤ102に噛み合わせると第三PTO軸107が二速になり、第一PTOギヤ98をスライドして第二PTOギヤ99に係合すると第一PTO軸95の回転が第二PTOギヤ99と第二十三ギヤ152を介して第三PTO軸107に伝わって四速となり、第五シンクロチェンジ151を第五シンクロ小ギヤ100に繋ぐと第五シンクロ小ギヤ100から第二十一ギヤ103に伝動して一速となり、第五シンクロチェンジ151を第五シンクロ大ギヤ101に繋ぐと第五シンクロ大ギヤ101から第二十四ギヤ153に伝動して三速となり、PTO逆転ギヤ105を第一PTOギヤ98と第二十ギヤ102に噛み合わせると第一PTO軸95の回転が第一PTOギヤ98からPTO逆転ギヤ105を経て第二十ギヤ102に伝動されて第三PTO軸107に伝わって逆回転となる。
【0049】
第三PTO軸107の回転は、第四PTO軸156を介して第五PTO軸108に伝動し、第一PTO出力ギヤ109と第二PTO出力ギヤ110でさらに減速してPTO出力軸111を駆動する。
【0050】
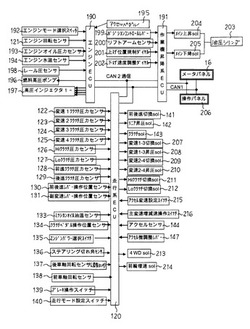
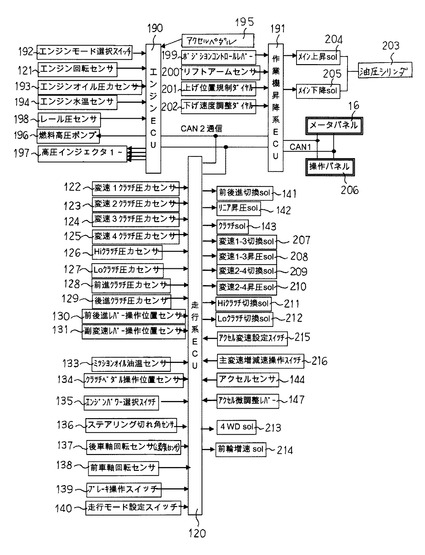
図4は、トラクター各部の作動を制御する自動制御の制御ブロック図で、エンジンEの出力を制御するエンジンECU190とロータリ作業機17の昇降を制御する作業機昇降系ECU191と前輪2と後輪3の回転を制御して走行速度を制御する走行系ECU120とで構成し、CAN通信で制御信号の交信を行っている。
【0051】
エンジンECU190への制御データの入力は、エンジンモード選択スイッチ192からの選択モードと、エンジン回転センサ121からのエンジン出力軸20の回転数と、エンジンオイル圧力センサ193からのオイル圧力と、エンジン水温センサ194からのラジエータ水温と、レール圧センサ198からのコモンレールの燃料圧力が入力と、アクセルセンサ195のアクセルペダル18の踏込み信号度等で、エンジンECU190からの制御出力は、燃料高圧ポンプ196へのレール圧と、高圧インジェクタ197への噴射信号である。
【0052】
作業機昇降系ECU191への制御データの入力は、作業機17の昇降を行うポジションコントロールレバー199の操作位置信号と、リフトアームセンサ200からのリフト位置信号と、上げ位置規制ダイヤル201と下げ速度調整ダイヤル202の調整信号等で、作業機昇降系ECU191からの制御出力は、油圧シリンダー203のメイン上昇sol204とメイン下降sol205への上昇或いは下降信号である。
【0053】
走行系ECU120への制御データの入力は、変速1クラッチ圧力センサ122と変速2クラッチ圧力センサ123と変速3クラッチ圧力センサ124と変速4クラッチ圧力センサ125とHi1クラッチ圧力センサ126とLoクラッチ圧力センサ127と前進クラッチ圧力センサ128と後進クラッチ圧力センサ129の各入・切信号と前後進レバー10の前後進レバー操作位置センサ130の操作位置と、副変速レバー15の副変速レバー操作位置センサ131の操作位置と、ミッションオイル油温センサ133のトランスミッションケース8内オイル温度と、クラッチペダル操作位置センサ134のクラッチペダル位置と、エンジンパワー選択スイッチ135の選択信号と、ステアリング切れ角センサ136の操舵角と、後車軸回転センサ137の後輪出力軸68の回転数と、前車軸回転センサ138の前輪出力軸93の回転数と、ブレーキ操作スイッチ139のブレーキ信号と、走行モード設定スイッチ140の走行モードと、アクセル変速設定スイッチ215の設定信号と、主変速増減速操作スイッチ216の設定信号と、アクセルペダル18の踏込み位置を検出するアクセルセンサ144の踏込み信号と、アクセル微調整レバー147の調整信号である。
【0054】
走行系ECU120からの制御出力は、前後進切換sol141とリニア昇圧sol142とクラッチsol143と変速1-3切換sol207や変速1-3昇圧sol208や変速2-4切換sol209や変速2-4昇圧sol210とHiクラッチ切換sol211やLoクラッチ切換sol212や4WDsol213や前輪増速sol214 等である。
【0055】
そして、走行速度や変速位置やエンジン水温その他のデータがステアリングハンドル7の前に設けるメータパネル16と操作パネル206に表示される。
次に、トラクター1の走行駆動制御を説明する。
【0056】
まず、機体の走行速度を検出する走行速度センサとして後車軸回転センサ137で走行速度を検出し、2WDで走行中にアクセルペダル18を戻してエンジン5の回転をアイドリング回転にした場合に、走行速度が低下しない場合には、走行系ECU120の制御によって前輪増速クラッチ79を繋いで4WDとして走行する。
【0057】
なお、前記の4WD切換は、主変速レバー14を四速或いは副変速レバー15を中速以上にしている場合に切り換える。
或いは、前記の4WD切換は、走行速度センサ187が3km/h以上の速度で走行している場合に切り換える。
【0058】
或いは、前記の4WD切換は、ステアリングハンドル7の旋回角をステアリング切れ角センサ136が検出し、20°以内の旋回角の場合に切り換える。
なお、前記の4WD切換は、前記の条件、すなわち、2WDで走行中にアクセルペダル18を戻しても走行速度が低下しない場合で、走行速度が3km/h以上で、主変速レバー14を四速或いは副変速レバー15を中速以上にしていて、ステアリングハンドル7の旋回角が20°以内の全ての条件を満たしている場合に切り換えるようにしても良い。
【0059】
また、機体の前後方向傾斜角を検出する機体傾斜センサを設けて、この機体傾斜センサが5°以上の前向き傾斜角度を検出した場合に、4WDに切り換えるようにしても良い。
また、アクセルセンサ144で指示するエンジン5の規定回転数よりもエンジン回転センサ121が検出するエンジン回転数が高い場合に4WDに切り換えるようにしても良い。
【0060】
また、前記の4WD切換条件にロータリ作業機17が上昇位置であることを加えても良い。
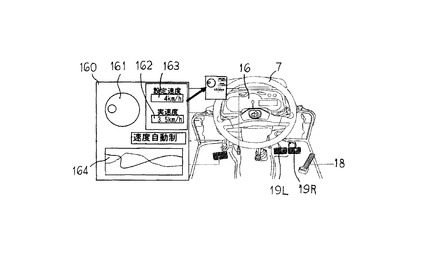
図5は、全自動トラクターとしてメータパネル16側を示し、モニタパネル160に設ける設置ダイヤル161を回して時速何キロで作業をしたいかを入力すると、変速機構とエンジン5を最適条件に制御して、設定速度163と実速度162と履歴表示164を行う。
【0061】
なお、エンジン回転の上昇は一定(例えば、500rpm程度)として、変速によって速度の調整を行い、負荷の増加によって設定速度に達しない場合は低速として負荷が減少すると設定速度に戻す。
【0062】
この全自動には、低燃費モードと高効率作業モードを設けて、オペレータが選択したり、作業モードを表示しながら自動で作業モードを選択するようにしても良い。
さらに、自動制御の履歴を記憶し、同じような作業では履歴をたどって自動制御するようにしても良い。
【符号の説明】
【0063】
7 ステアリングハンドル
14 主変速レバー
15 副変速レバー
18 アクセルペダル
94 走行装置
137 走行速度センサ(後車軸回転センサ)
【技術分野】
【0001】
本発明は、トラクター等の作業車両において、二輪駆動と四輪駆動を自動的に切り換える四輪駆動制御装置に関する。
【背景技術】
【0002】
四輪走行作業車両は、走行負荷を軽減するために平地を2WDで走行するが、車輪のスリップを検出してスリップが生じると二輪駆動(2WD)で走行していても四輪駆動(4WD)に自動的に切り換える制御が行われる。
【0003】
例えば、特開平6−107012号公報には、2WD走行中の急な下り坂で、変速機構を低速の変速状態にして走行していても、地面が滑りやすくて駆動輪である後車輪の走行速度以上に機体が走行した場合、前車輪のオーバーランを前後軸回転センサで判定し、制御手段であるコントローラにより前後輪駆動(4WD)に変更制御して暴走を防ぐ。そして、この変更制御動作が、例えば30秒間に6回以上行われる走行状態の場合には、常時4WDに固定して走行するように制御する。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平6−107012号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
前記の如く、従来技術は、前車輪のオーバーランを前後軸回転センサで判定して4WDに変更制御しているが、このような前車輪のオーバーランが生じない状態で下り坂を走行している場合でも2WDでは停止距離が4WDの場合よりも長くなって、4WD走行に慣れたオペレータがブレーキを踏み込むタイミングが遅れて停止距離が伸びて危険な状態になる場合が有る。
【0006】
本発明は、前車輪のオーバーランが生じなくても下り坂走行を検出して自動的に4WDとすることで、停止距離が長くなる下り坂走行でも4WD走行の感覚で操縦可能な四輪走行作業車両の四輪駆動制御装置とすることを課題とする。
【課題を解決するための手段】
【0007】
上記本発明の課題は、次の技術手段により解決される。
請求項1に記載の発明は、走行装置(94)が後輪(32)のみで駆動する2WDで走行中にアクセルペダル(18)を踏み込み操作から解除してエンジン回転をアイドリング状態にしたにも拘らず、走行速度センサ(187)が速度低下を示さない場合に、走行装置(94)の駆動を4WDに変更することを特徴とする作業車両の四輪駆動制御装置とする。
【0008】
この構成では、2WDで走行中にアクセルペダル18を踏み込み操作から解除してエンジン回転をアイドリング状態にすれば駆動力が無くなって走行速度を低下する筈であるが、走行速度が低下しないので下り坂の走行中であると判断して4WDに変更して、制動した際の停止距離を長くすることなく4WD走行の感覚で機体を停止出来る。
【0009】
請求項2に記載の発明は、走行速度が所定速度以上で走行装置(94)の駆動を4WDに変更することを特徴とする請求項1に記載の作業車両の四輪駆動制御装置とする。
この構成で、所定速度以上で走行している場合に走行停止距離が大きく伸びるので、走行装置94を2WDから4WDに変更して、思った以上に停止距離を長くすることなく4WD走行の感覚で機体を停止出来る。
【0010】
請求項3に記載の発明は、主変速レバー(14)或いは副変速レバー(15)を所定の増速段以上に変速している場合に、走行装置(94)の駆動を2WDから4WDに変更することを特徴とする請求項1に記載の作業車両の四輪駆動制御装置とする。
【0011】
この構成で、主変速レバー14或いは副変速レバー15が所定の増速段以上に変速してエンジンブレーキが働き難く走行停止距離が長くなる場合のみ、4WDで停止距離を長くすることなく4WD走行の感覚で停止距離を短く出来る。
【0012】
請求項4に記載の発明は、ステアリングハンドル(7)の旋回角が所定旋回角以下の場合に、走行装置(94)の駆動を4WDに変更することを特徴とする請求項1から請求項3のどれか1項に記載の作業車両の四輪駆動制御装置する。
【0013】
この構成で、ステアリングハンドル7の旋回角が所定旋回角以下の場合には走行速度が速いままで旋回することが多く、その場合にも停止距離を長くすることなく4WD走行の感覚で機体を停止出来る。
【発明の効果】
【0014】
請求項1に記載の発明で、2WDで走行中にアクセルペダル18を踏み込み操作から解除してエンジン回転をアイドリング状態にすれば駆動力が無くなって走行速度を低下する筈であるが、走行速度が低下しないと下り坂の走行中であると判断して4WDに変更して、制動した際の停止距離を長くすることなく4WD走行の感覚で機体を停止出来る。
【0015】
請求項2に記載の発明で、所定速度以上で走行している場合に走行停止距離が伸びるので、走行装置94を2WDから4WDに変更して、思った以上に停止距離を長くすることなく4WD走行の感覚で機体を停止出来る。
【0016】
請求項3に記載の発明で、主変速レバー14或いは副変速レバー15が所定の増速段以上に変速してエンジンブレーキが働き難い場合のみ、停止距離を長くすることなく4WD走行の感覚で機体を停止出来る。
【0017】
請求項4に記載の発明で、ステアリングハンドル7の旋回角が所定旋回角以下の場合には走行速度が速くなることが多く、その場合に停止距離を長くすることなく4WD走行の感覚で機体を停止出来る。
【図面の簡単な説明】
【0018】
【図1】本発明の作業車両として示すトラクターの全体側面図である。
【図2】エンジンから前後輪及びPTO軸への動力伝動線図である。
【図3】ミッションケースの一部拡大断面展開図である。
【図4】自動制御ブロック図である。
【図5】メータパネルの正面図である。
【発明を実施するための形態】
【0019】
作業車両の一例としてトラクターにおける実施例を以下に説明する。
なお、本明細書において作業車両の前進方向に向かって左右方向をそれぞれ左、右といい、前進方向を前、後進方向を後という。
【0020】
トラクター1は、図1に示す如く、機体の前後部に前輪2,2と後輪3,3を備え、機体の前部に搭載したエンジン5のエンジン出力軸20の回転をミッションケース8内の変速装置によって適宜減速して、これら前輪2,2と後輪3,3に伝えるように構成している。
【0021】
機体中央でのハンドルポスト6にはステアリングハンドル7が設けられ、その後方にはシート9が設けられている。ステアリングハンドル7の下方には、機体の進行方向を前後方向に切り換える前後進レバー10が設けられている。この前後進レバー10を前側にシフトすると機体は前進し、後側へシフトすると後進する構成である。
【0022】
また、ハンドルポスト6を挟んで前後進レバー10の反対側にはエンジン回転数を調節するアクセルレバー11が設けられ、またステップフロア13の右コーナー部には、同様にエンジン回転数を調節するアクセルペダル18と、左右の後輪3,3にブレーキを作動させる左右のブレーキペダル19R,19Lが設けられている。
【0023】
ハンドルポスト6上部のステアリングハンドル7の前側にメータパネル16が設けられて、走行速度等の機体状況が表示される。
また、一速から八速まで変速する主変速レバー14はシート9の左前側部にあり、超低速、低速、中速、高速の四段及び中立のいずれかの位置を選択できる副変速レバー15はその後方にあり、さらにその右側に四段に変速するPTO変速レバー12を設けている。
【0024】
トラクター1の機体後部には、ロータリ作業機17を装着して、ミッションケース8から後方へ突出するPTO出力軸111で駆動するようにしている。
図2は、ミッションケース8内の変速装置の動力伝動機構を示す伝動線図で、エンジン5から前輪2と後輪3及びロータリ作業機17へのPTO出力軸111への変速伝動機構を説明する。
【0025】
エンジン5のエンジン出力軸20の回転がメインクラッチ112を介して入力軸21に伝動され、この入力軸21に固着の第一入力ギヤ22と第二入力ギヤ23がそれぞれ第一高・低クラッチ24の第一低速ギヤ26と第二高・低クラッチ25の第二低速ギヤ27及び第一高・低クラッチ24の第一高速ギヤ30と第二高・低クラッチ25の第二高速ギヤ31に噛み合って回転を伝動している。
【0026】
そして、第一高・低クラッチ24を第一低速ギヤ26側に繋ぐと第一低速ギヤ26から第一クラッチ軸28に伝動され、第一高速ギヤ30側に繋ぐと第一高速ギヤ30から第一クラッチ軸28に伝動され、第二高・低クラッチ25を第二低速ギヤ27側に繋ぐと第二低速ギヤ27から第二クラッチ軸29に伝動され、第二高速ギヤ31側に繋ぐと第二高速ギヤ31から第二クラッチ軸29に伝動される。
【0027】
第一高・低クラッチ24と第二高・低クラッチ25は同一の油圧多板クラッチで、それぞれ入力軸21の回転を同一減速比で高・低の二段に減速して第一クラッチ軸28と第二クラッチ軸29に伝動することになる。
【0028】
また、図3に示す如く、第一クラッチ軸28と第二クラッチ軸29をミッションケース8に支持する前仕切壁181に形成した肉盛部181aにケースの左右開口部側からドリルで加工した給油孔8bを設けて、この給油孔8bから第一高・低クラッチ24と第二高・低クラッチ25の軸に給油している。
【0029】
図2に戻って、第一クラッチ軸28に固着の第一ギヤ113が低速伝動軸34に固着の第二ギヤ35と噛み合って減速して伝動され、第二クラッチ軸29に固着の第三ギヤ149が高速伝動軸32に固着の第四ギヤ33と噛み合って増速して伝動される。
【0030】
ここまでの変速伝動で、低速伝動軸34が低速で二段に、高速伝動軸32が高速で二段にそれぞれ変速されることで、計四段に変速されることになる。
低速伝動軸34と高速伝動軸32の回転がそれぞれ第一シンクロチェンジ42と第二シンクロチェンジ36に伝動され、第一シンクロチェンジ42の第一シンクロ小ギヤ43と第二シンクロチェンジ36の第二シンクロ小ギヤ37が第一伝動軸39の第五ギヤ40と噛み合い、第一シンクロチェンジ42の第一シンクロ大ギヤ44と第二シンクロチェンジ36の第二シンクロ大ギヤ38が第一伝動軸39の第六ギヤ41と噛み合って伝動する。
【0031】
第一シンクロチェンジ42の第一シンクロ小ギヤ43と第一シンクロギヤ大44及び第二シンクロチェンジ36の第二シンクロ小ギヤ37と第二シンクロ大ギヤ38は、全く同一のギヤで、低速伝動軸34が低速回転し高速伝動軸32が高速回転しているので、第一シンクロチェンジ42を切換えると低速でさらに二段に変速され、第二シンクロチェンジ36を切換えると高速でさらに二段に変速される。すなわち、第一入力軸21の回転が第一伝動軸39で低速四段と高速四段に変速されることになる。
【0032】
ここまでの主変速部150で、操縦者が操作する主変速レバー14の変速位置を読み取って、走行系ECU120で自動的に第一・第二高・低油圧多板クラッチ24,25と第一・第二シンクロチェンジ36,42を制御して低速四段と高速四段まで変速される。
【0033】
さらに、第一伝動軸39は第二伝動軸45に軸連結で連結されている。この第二伝動軸45には、第七ギヤ46と第八ギヤ47が固着され、油圧多板の正逆クラッチ48の正転クラッチギヤ49と逆転軸52の逆転ギヤ51に噛み合わされ、逆転ギヤ51が正逆クラッチ48の逆転クラッチギヤ50と噛み合っている。
【0034】
従って、正逆クラッチ48を正転クラッチギヤ49に繋ぐと、正転状態で正逆クラッチ48に連結の副変速軸53に伝動され、正逆クラッチ48を逆転クラッチギヤ50に繋ぐと、逆転状態で副変速軸53に伝動される。正転と逆転では減速比が異なり、逆転の方が低速になる。
【0035】
次に、副変速部154を説明する。
副変速軸53には第九ギヤ54と第十ギヤ55が固着され、それぞれ第三シンクロチェンジ58の第三シンクロ大ギヤ56と第三シンクロ小ギヤ59に噛み合っている。従って、第三シンクロチェンジ58を第三シンクロ大ギヤ56側に繋ぐと第九ギヤ54から第三シンクロ大ギヤ56に伝動した回転で第5伝動軸60が増速して高速で駆動され、第三シンクロチェンジ58を第三シンクロ小ギヤ59側に繋ぐと第十ギヤ55から第三シンクロ小ギヤ59に伝動した回転で第五伝動軸60が減速して中速で駆動される。
【0036】
さらに、第三シンクロチェンジ58の第三シンクロ小ギヤ59側には第十一ギヤ57を固着して、第四シンクロチェンジ71の第四シンクロ小ギヤ69と噛み合っている。そして、第四シンクロ小ギヤ69側には第十五ギヤ70を固着し、この第十五ギヤ70が第二筒軸114の第十七ギヤ75と噛み合って第二筒軸114に固着の第十八ギヤ76から第四シンクロ大ギヤ72に伝動している。第四シンクロチェンジ71を装着した第一筒軸73には、第十六ギヤ74を固着している。
【0037】
従って、第三シンクロチェンジ58を中立にすると、第十ギヤ55の回転が第三シンクロ小ギヤ59に伝動され、第三シンクロ小ギヤ59側に固着の第十一ギヤ57から第四シンクロ小ギヤ69に伝動される。
【0038】
この状態で、第四シンクロチェンジ71を第四シンクロ小ギヤ69側に繋ぐと、第四シンクロ小ギヤ69の回転が第十六ギヤ74の回転となって低速となり、第四シンクロチェンジ71を第四シンクロ大ギヤ72側に繋ぐと第四シンクロ小ギヤ69の回転が第十五ギヤ70から第十七ギヤ75と第十八ギヤ76と第四シンクロ大ギヤ72に伝動されて第十六ギヤ74が極低速となる。
【0039】
なお、第三シンクロチェンジ58を第三シンクロ大ギヤ56側或いは第三シンクロ小ギヤ59側に繋ぐ場合には、第四シンクロチェンジ71を中立にしておく。
従って、主変速部150変速された副変速軸53の低速四段と高速四段が、副変速部154で四段に変速されることで、低速十六段と高速十六段に変速されることになる。
【0040】
さらに、第十六ギヤ74は前記第5伝動軸60に固着の第十二ギヤ61と噛み合って第5伝動軸60を駆動する。この第5伝動軸60の軸端に固着の第一ベベルギヤ62がリアベベルケース64の第二ベベルギヤ63と噛み合っていて、リアベベルケース64のベベル出力軸65から第十三ギヤ66と第十四ギヤ67を介して後輪出力軸68を回転して後輪3を駆動する。
【0041】
また、第5伝動軸60には第二十一ギヤ117が固着され、副変速軸53に軸支された第三筒軸119に固着の第二十二ギヤ118と第二十二ギヤ148を介して第一前輪駆動軸78の第十九ギヤ77に伝動して、前記第十六ギヤ74の低速十六段と高速十六段の回転が第一前輪駆動軸78に伝動されている。
【0042】
この第一前輪駆動軸78から前輪増速クラッチ79を介して第二前輪駆動軸84に伝動し、第三前輪駆動軸85と第四前輪駆動軸86と前輪駆動ベベル軸87に引き継いで伝動し、前輪駆動ベベル軸87の軸端に固着の第一前ベベルギヤ88が前ベベルケース89の第二前ベベルギヤ115と噛み合っていて、前ベベルケース89の前ベベル出力軸90から第一前ベベルギヤ組91と前縦軸116と第二前ベベルギヤ組92を介して前輪出力軸93を回転して前輪2を駆動する。
【0043】
前輪増速クラッチ79を切った状態で後輪3の二輪を駆動する2WDになり、前輪増速クラッチ79を第一増速クラッチギヤ82側に繋いだり第二増速クラッチギヤ80に繋いだりするとそれぞれ第一増速ギヤ83と第二増速ギヤ81に噛み合って増速率を変更して前輪2も駆動する4WDとなる。
【0044】
ここまでの副変速部154が副変速レバー15の変速位置を読み取って、走行系ECU120で自動的に第三シンクロチェンジ58と第四シンクロチェンジ71を制御して変速される。
【0045】
また、第四シンクロチェンジ71を装着した第一筒軸73は、第三シンクロチェンジ58を装着した第5伝動軸60の下側に配置され、ミッションケース8の長さを短くしている。
【0046】
次に、PTO出力軸111の伝動経路を説明する。
前記第二入力ギヤ23にPTOメインクラッチ97のメインクラッチギヤ96を噛み合わせて、PTOメインクラッチ97で動力の断続を行うようにしている。
【0047】
PTOメインクラッチ97を装着した第一PTO軸95には、次の如く、PTO変速部157が設けられている。
第一PTOギヤ98と第二PTOギヤ99と第五シンクロチェンジ151の第五シンクロ小ギヤ100と第五シンクロ大ギヤ101を装着し、第二PTO軸104に第二十ギヤ102と第二十三ギヤ152と第二十一ギヤ103と第二十四ギヤ153を固着し、カウンタ軸106にPTO逆転ギヤ105を軸支している。
【0048】
第一PTOギヤ98をスライドして第二十ギヤ102に噛み合わせると第三PTO軸107が二速になり、第一PTOギヤ98をスライドして第二PTOギヤ99に係合すると第一PTO軸95の回転が第二PTOギヤ99と第二十三ギヤ152を介して第三PTO軸107に伝わって四速となり、第五シンクロチェンジ151を第五シンクロ小ギヤ100に繋ぐと第五シンクロ小ギヤ100から第二十一ギヤ103に伝動して一速となり、第五シンクロチェンジ151を第五シンクロ大ギヤ101に繋ぐと第五シンクロ大ギヤ101から第二十四ギヤ153に伝動して三速となり、PTO逆転ギヤ105を第一PTOギヤ98と第二十ギヤ102に噛み合わせると第一PTO軸95の回転が第一PTOギヤ98からPTO逆転ギヤ105を経て第二十ギヤ102に伝動されて第三PTO軸107に伝わって逆回転となる。
【0049】
第三PTO軸107の回転は、第四PTO軸156を介して第五PTO軸108に伝動し、第一PTO出力ギヤ109と第二PTO出力ギヤ110でさらに減速してPTO出力軸111を駆動する。
【0050】
図4は、トラクター各部の作動を制御する自動制御の制御ブロック図で、エンジンEの出力を制御するエンジンECU190とロータリ作業機17の昇降を制御する作業機昇降系ECU191と前輪2と後輪3の回転を制御して走行速度を制御する走行系ECU120とで構成し、CAN通信で制御信号の交信を行っている。
【0051】
エンジンECU190への制御データの入力は、エンジンモード選択スイッチ192からの選択モードと、エンジン回転センサ121からのエンジン出力軸20の回転数と、エンジンオイル圧力センサ193からのオイル圧力と、エンジン水温センサ194からのラジエータ水温と、レール圧センサ198からのコモンレールの燃料圧力が入力と、アクセルセンサ195のアクセルペダル18の踏込み信号度等で、エンジンECU190からの制御出力は、燃料高圧ポンプ196へのレール圧と、高圧インジェクタ197への噴射信号である。
【0052】
作業機昇降系ECU191への制御データの入力は、作業機17の昇降を行うポジションコントロールレバー199の操作位置信号と、リフトアームセンサ200からのリフト位置信号と、上げ位置規制ダイヤル201と下げ速度調整ダイヤル202の調整信号等で、作業機昇降系ECU191からの制御出力は、油圧シリンダー203のメイン上昇sol204とメイン下降sol205への上昇或いは下降信号である。
【0053】
走行系ECU120への制御データの入力は、変速1クラッチ圧力センサ122と変速2クラッチ圧力センサ123と変速3クラッチ圧力センサ124と変速4クラッチ圧力センサ125とHi1クラッチ圧力センサ126とLoクラッチ圧力センサ127と前進クラッチ圧力センサ128と後進クラッチ圧力センサ129の各入・切信号と前後進レバー10の前後進レバー操作位置センサ130の操作位置と、副変速レバー15の副変速レバー操作位置センサ131の操作位置と、ミッションオイル油温センサ133のトランスミッションケース8内オイル温度と、クラッチペダル操作位置センサ134のクラッチペダル位置と、エンジンパワー選択スイッチ135の選択信号と、ステアリング切れ角センサ136の操舵角と、後車軸回転センサ137の後輪出力軸68の回転数と、前車軸回転センサ138の前輪出力軸93の回転数と、ブレーキ操作スイッチ139のブレーキ信号と、走行モード設定スイッチ140の走行モードと、アクセル変速設定スイッチ215の設定信号と、主変速増減速操作スイッチ216の設定信号と、アクセルペダル18の踏込み位置を検出するアクセルセンサ144の踏込み信号と、アクセル微調整レバー147の調整信号である。
【0054】
走行系ECU120からの制御出力は、前後進切換sol141とリニア昇圧sol142とクラッチsol143と変速1-3切換sol207や変速1-3昇圧sol208や変速2-4切換sol209や変速2-4昇圧sol210とHiクラッチ切換sol211やLoクラッチ切換sol212や4WDsol213や前輪増速sol214 等である。
【0055】
そして、走行速度や変速位置やエンジン水温その他のデータがステアリングハンドル7の前に設けるメータパネル16と操作パネル206に表示される。
次に、トラクター1の走行駆動制御を説明する。
【0056】
まず、機体の走行速度を検出する走行速度センサとして後車軸回転センサ137で走行速度を検出し、2WDで走行中にアクセルペダル18を戻してエンジン5の回転をアイドリング回転にした場合に、走行速度が低下しない場合には、走行系ECU120の制御によって前輪増速クラッチ79を繋いで4WDとして走行する。
【0057】
なお、前記の4WD切換は、主変速レバー14を四速或いは副変速レバー15を中速以上にしている場合に切り換える。
或いは、前記の4WD切換は、走行速度センサ187が3km/h以上の速度で走行している場合に切り換える。
【0058】
或いは、前記の4WD切換は、ステアリングハンドル7の旋回角をステアリング切れ角センサ136が検出し、20°以内の旋回角の場合に切り換える。
なお、前記の4WD切換は、前記の条件、すなわち、2WDで走行中にアクセルペダル18を戻しても走行速度が低下しない場合で、走行速度が3km/h以上で、主変速レバー14を四速或いは副変速レバー15を中速以上にしていて、ステアリングハンドル7の旋回角が20°以内の全ての条件を満たしている場合に切り換えるようにしても良い。
【0059】
また、機体の前後方向傾斜角を検出する機体傾斜センサを設けて、この機体傾斜センサが5°以上の前向き傾斜角度を検出した場合に、4WDに切り換えるようにしても良い。
また、アクセルセンサ144で指示するエンジン5の規定回転数よりもエンジン回転センサ121が検出するエンジン回転数が高い場合に4WDに切り換えるようにしても良い。
【0060】
また、前記の4WD切換条件にロータリ作業機17が上昇位置であることを加えても良い。
図5は、全自動トラクターとしてメータパネル16側を示し、モニタパネル160に設ける設置ダイヤル161を回して時速何キロで作業をしたいかを入力すると、変速機構とエンジン5を最適条件に制御して、設定速度163と実速度162と履歴表示164を行う。
【0061】
なお、エンジン回転の上昇は一定(例えば、500rpm程度)として、変速によって速度の調整を行い、負荷の増加によって設定速度に達しない場合は低速として負荷が減少すると設定速度に戻す。
【0062】
この全自動には、低燃費モードと高効率作業モードを設けて、オペレータが選択したり、作業モードを表示しながら自動で作業モードを選択するようにしても良い。
さらに、自動制御の履歴を記憶し、同じような作業では履歴をたどって自動制御するようにしても良い。
【符号の説明】
【0063】
7 ステアリングハンドル
14 主変速レバー
15 副変速レバー
18 アクセルペダル
94 走行装置
137 走行速度センサ(後車軸回転センサ)
【特許請求の範囲】
【請求項1】
走行装置(94)が後輪(32)のみで駆動する2WDで走行中にアクセルペダル(18)を踏み込み操作から解除してエンジン回転をアイドリング状態にしたにも拘らず、走行速度センサ(187)が速度低下を示さない場合に、走行装置(94)の駆動を4WDに変更することを特徴とする作業車両の四輪駆動制御装置。
【請求項2】
走行速度が所定速度以上で走行装置(94)の駆動を4WDに変更することを特徴とする請求項1に記載の作業車両の四輪駆動制御装置。
【請求項3】
主変速レバー(14)或いは副変速レバー(15)を所定の増速段以上に変速している場合に、走行装置(94)の駆動を2WDから4WDに変更することを特徴とする請求項1に記載の作業車両の四輪駆動制御装置。
【請求項4】
ステアリングハンドル(7)の旋回角が所定旋回角以下の場合に、走行装置(94)の駆動を4WDに変更することを特徴とする請求項1から請求項3のどれか1項に記載の作業車両の四輪駆動制御装置。
【請求項1】
走行装置(94)が後輪(32)のみで駆動する2WDで走行中にアクセルペダル(18)を踏み込み操作から解除してエンジン回転をアイドリング状態にしたにも拘らず、走行速度センサ(187)が速度低下を示さない場合に、走行装置(94)の駆動を4WDに変更することを特徴とする作業車両の四輪駆動制御装置。
【請求項2】
走行速度が所定速度以上で走行装置(94)の駆動を4WDに変更することを特徴とする請求項1に記載の作業車両の四輪駆動制御装置。
【請求項3】
主変速レバー(14)或いは副変速レバー(15)を所定の増速段以上に変速している場合に、走行装置(94)の駆動を2WDから4WDに変更することを特徴とする請求項1に記載の作業車両の四輪駆動制御装置。
【請求項4】
ステアリングハンドル(7)の旋回角が所定旋回角以下の場合に、走行装置(94)の駆動を4WDに変更することを特徴とする請求項1から請求項3のどれか1項に記載の作業車両の四輪駆動制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2013−112185(P2013−112185A)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2011−260610(P2011−260610)
【出願日】平成23年11月29日(2011.11.29)
【出願人】(000000125)井関農機株式会社 (3,813)
【Fターム(参考)】
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成23年11月29日(2011.11.29)
【出願人】(000000125)井関農機株式会社 (3,813)
【Fターム(参考)】
[ Back to top ]