
作業車両
【課題】本発明では、前後進の変速ペダルの動きを正確に検出し、走行速度を精度よく制御する装置を提供することを課題とする。
【解決手段】機体を前後進させる前進変速ペダル3と後進変速ペダル4の動きをセンサアーム68の回動に変換し、該センサアーム68の回動を変速センサ5で検出し、該変速センサ5の検出信号で油圧無段変速装置6のトラニオン軸7をアクチュエータ8で回動させて走行速度を変速する作業車両において、前記センサアーム68の枢支軸66に設けたトーションバネ9の付勢力でセンサアーム68の位置を中立位置に戻すように構成したことを特徴とする作業車両の構成とする。
【解決手段】機体を前後進させる前進変速ペダル3と後進変速ペダル4の動きをセンサアーム68の回動に変換し、該センサアーム68の回動を変速センサ5で検出し、該変速センサ5の検出信号で油圧無段変速装置6のトラニオン軸7をアクチュエータ8で回動させて走行速度を変速する作業車両において、前記センサアーム68の枢支軸66に設けたトーションバネ9の付勢力でセンサアーム68の位置を中立位置に戻すように構成したことを特徴とする作業車両の構成とする。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、作業車両に関する。特に、トラクタ等の油圧駆動車両に用いられる油圧無段変速装置付トランスミッションの変速操作装置に関する。
【背景技術】
【0002】
農業用トラクタ等の油圧駆動車両では、車両の走行方向を前進にする前進ペダルと後進にする後進ペダルを操縦席のフロアパネルに並べて設けて、操縦者が前進ペダルか後進ペダルを適宜に踏込んで車両を前後進させる構成や一つの変速ペダルを前後に踏み込むことで前進或いは後進させる構成がある。例えば、特開2005−233260号公報には、ステップ上に設けた変速ペダルを前側に踏み込むと前進速度が速くなり後側に踏み込むと後進速度が速くなるように変速ペダルと油圧無段変速装置の変速操作軸の連動構成が記載されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2005−233260号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
前記の油圧駆動車両の変速操作装置で、前後進変速ペダルで直接油圧無段変速装置の変速操作軸を回動するのではなく、変速ペダルの動きを検出してその動きに応じて変速操作軸を油圧シリンダで回動するようにして変速ペダルを軽快に踏み込めるようにした構成が有るが、この構成では、変速ペダルの動きを正確に検出して油圧シリンダを制御する必要がある。
【0005】
本発明では、変速ペダルの動きを正確に検出して走行速度を精度よく制御する油圧駆動車両の変速操作装置を提供することを課題とする。
【課題を解決するための手段】
【0006】
上記本発明の課題は、次の技術手段により解決される。
請求項1に記載の発明は、機体を前後進させる前進変速ペダル3と後進変速ペダル4の動きをセンサアーム68の回動に変換し、該センサアーム68の回動を変速センサ5で検出し、該変速センサ5の検出信号で油圧無段変速装置6のトラニオン軸7をアクチュエータ8で回動させて走行速度を変速する作業車両において、前記センサアーム68の枢支軸66に設けたトーションバネ9の付勢力でセンサアーム68の位置を中立位置に戻すように構成したことを特徴とする作業車両としたものである。
【発明の効果】
【0007】
前進変速ペダル3,後進変速ペダル4から足を離すと、センサアーム68がトーションバネ9の弾発力で中立位置に戻り、これを変速センサ5が検出してアクチュエータ8を作動させて油圧無段変速装置6のトラニオン軸7を中立位置に戻して走行が停止される。このとき、トーションバネ9がセンサアーム68を直接中立位置に戻すので、変速ペダル3,4とセンサアーム68の連動途中に戻しバネを設けた構成と比較してセンサアーム68を確実に中立位置に戻す作用が有り、変速ペダル3,4による走行速度の制御を精度よく行える。
【図面の簡単な説明】
【0008】
【図1】油圧駆動車両(トラクタ)の平面図である。
【図2】油圧駆動車両(トラクタ)の側面図である。
【図3】ミッションケースの側断面図である。
【図4】油圧駆動車両(トラクタ)の一部拡大側面図である。
【図5】油圧駆動車両(トラクタ)の一部拡大平面図である。
【図6】変速ペダルの拡大側面図である。
【図7】変速ペダルの拡大平面図である。
【図8】変速ペダルの作用状態を示す一部の側面図である。
【図9】変速ペダルの作用状態を示す一部の側面図である。
【図10】変速機構の拡大側面図である。
【図11】変速機構の拡大斜視図である。
【図12】オートクルーズ(定速走行)の一部の油圧回路図
【図13】手動切替バルブを用いる場合の一部の油圧回路図
【発明を実施するための形態】
【0009】
以下、本発明の実施形態を図面に示す実施例を参照しながら説明する。
以下、本発明の実施の形態について、図面を参照しながら説明する。
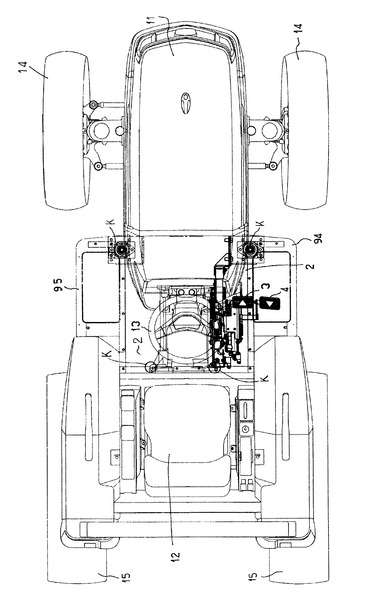
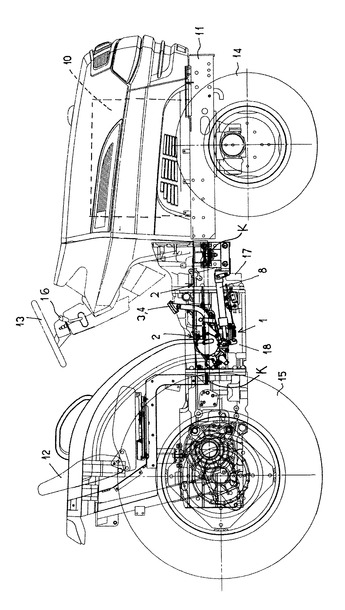
図1と図2は、油圧駆動車両の実施例であるトラクタの全体を示す図面で、機体前側のエンジン10を搭載した原動部11とこの原動部11から後方へ延びるミッションケース1で車体を構成し、ミッションケース1上に緩衝材kを介してフロアパネル2を装架し、フロアパネル2の後側に作業者が搭乗して座る操縦席12を設け、機体の前後中間位置にステアリングハンドル13を立設し、底部のミッションケース1から左右に突設する駆動軸に前輪14と後輪15を装着している。
【0010】
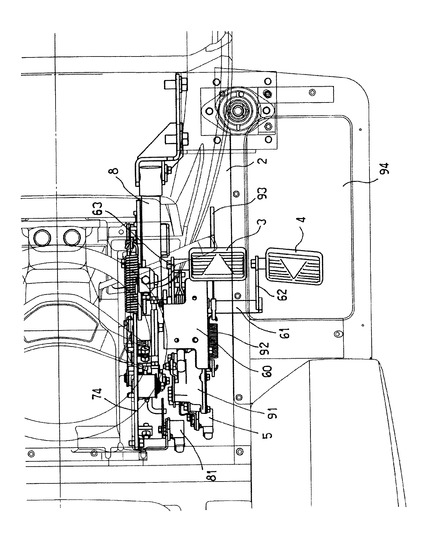
ステアリングハンドル13の右側には前後進レバー16を設け、フロアパネル2上の右側に前進ペダル3と後進ペダル4を設け、フロアパネル2上の左側にクラッチペダル(図示省略)とブレーキペダル(図示省略)を設けている。フロアパネル2はミッションケース1の上側にマウントゴム等の緩衝材kで浮かせて取付けていて、左右中央部はミッションケース1の形状に沿って前上がりに形成している。このフロアパネル2の左右側部には、水平なサブフロアパネル94,95を張り出して一体的に取付けている。
【0011】
図示を省略するが、操縦席12の左側には、走行変速段を変更する主変速レバーや機体の後部に装着するロータリ等の作業機を駆動するPTO出力軸の駆動断続を行うPTOクラッチレバー等を設けている。
【0012】
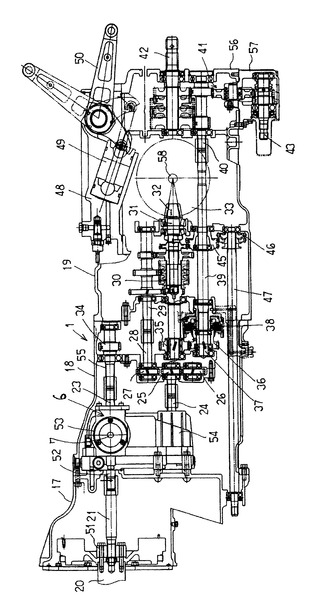
次に、ミッションケース1内の動力伝動機構を図3で説明する。
エンジン10の出力を前輪14と後輪15と後PTO出力軸42と中間PTO出力軸43に増減速して伝動するミッションケース1は、前ケース17、中間ケース18、後ケース19の3つの中空ケースを一体に連結した中空のケースである。
【0013】
前ケース17内でエンジン10の出力軸20に連結したカップリング51へスプライン嵌合した入力軸21が油圧無段変速装置(以下、「HST」という)22の入力軸52に連結して動力が伝動される。
【0014】
HST6は可変容量型の油圧ポンプ53と固定容量型の油圧モータ54で構成され、油圧ポンプ53の可動斜板の傾きを変えることで油圧モータ54の回転を変更する。この可動斜板に連結するトラニオン軸7の回動角度は前記前後進レバー16と前進ペダル3と後進ペダル4の動きを検出してマイコンで作動する油圧シリンダ8によって変更されて、油圧モータ54のモータ出力軸24の回転が変速される。油圧ポンプ53に繋がるポンプ出力軸23の回転は入力軸52の回転数と同じである。
【0015】
ポンプ出力軸23の回転は、PTO第一中間軸55から第一ギヤ34と第二ギヤ35と第三ギヤ36を介してPTO第二中間軸39へ伝動され、このPTO第二中間軸39に直結したPTO入力軸40からPTO第一ギヤケース56とPTO第二ギヤケース57内のギヤ伝動41で変速及び動力分岐されて最終的に後PTO出力軸42と中間PTO出力軸43で回転が外部へ取り出されて、ロータリやモア等の作業機を駆動する。
【0016】
モータ出力軸24の回転出力は、第四ギヤ25と第五ギヤ26と第六ギヤ27を介して中継軸28へ伝動され、この中継軸28に直結のギヤ軸29を回転する。そして、ギヤ軸29の各ギヤにクラッチギヤ30を噛み合わせて走行軸31へ変速伝動し、走行軸31のベベルギヤ32を後輪駆動軸58のベベルギヤ33に噛み合わせて後輪駆動軸58を駆動する。また、走行軸31の回転は、第七ギヤ45とクラッチギヤ46を介して前輪駆動軸47を適宜に駆動する。
【0017】
後ケース19の後上部にリフトアーム50と油圧シリンダ49を備えた作業機作動ケース48を装着している。
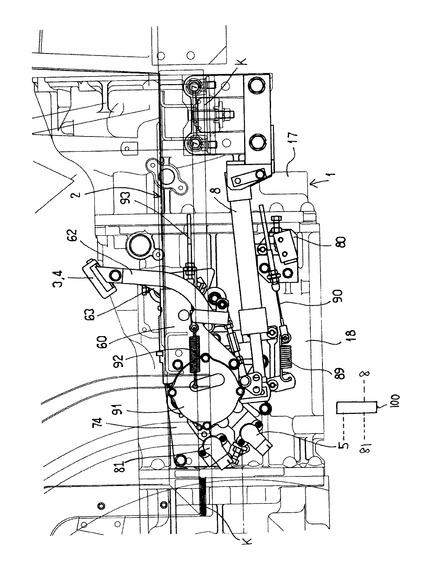
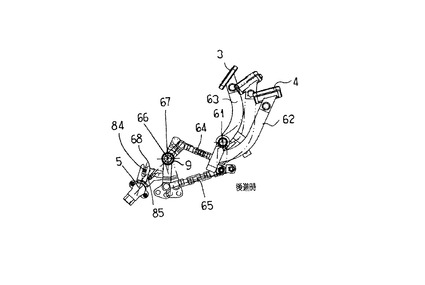
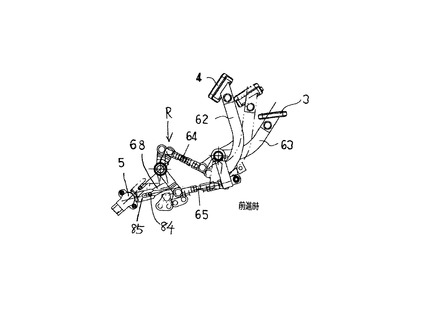
図4と図5に示す如く、前進ペダル3と後進ペダル4を装着するブラケット60はフロアパネル2の底面側に取り付け、HST6のトラニオン軸7を回動する部材をミッションケース1の中間ケース18に取付け、油圧シリンダ8をミッションケース1の前ケース17に取付けている。
【0018】
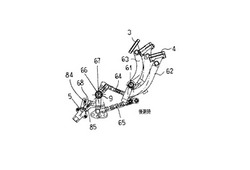
次に、前進ペダル3と後進ペダル4の構成を図6から図9で説明する。
前進ペダル3と後進ペダル4は、フロアパネル2の底面側に取り付けたブラケット60の枢支軸61に枢支したアーム62,63をフロアパネル2の上面に突出させ、そのアーム62,63の上端に取付けている。アーム62,63は枢支軸61にそれぞれ回動可能にすると共に、枢支軸61の後側でブラケット60に設ける別の枢支軸66に回動可能に枢支したセンサ筒67へリンク64,65で上下から連結している。従って、前進ペダル3と後進ペダル4は、一方を踏込むと他方が浮き上がる関係に連動することになり、同時に前進ペダル3と後進ペダル4を踏むことがあれば踏込めず、誤操作の防止になる。
【0019】
センサ筒67には先端にピン84を設けたセンサアーム68を固着し、前進ペダル3と後進ペダル4の踏込みによってピン84が枢支軸66を中心にして回動する。そして、このピン84の動きを検出するポテンショメータからなる変速センサ5のアーム85が係合している。この変速センサ5は、前進ペダル3と後進ペダル4の動きを一個で検出しているので、コストダウンになる。
【0020】
また、センサ筒67には回動を止めるブレーキ91を設けて、このブレーキ91のブレーキアーム91aにばね92とワイヤ93で連結するオートクルーズレバーを入りにすると、センサ筒67を固定してその固定位置での走行速度を保持するようにしている。
【0021】
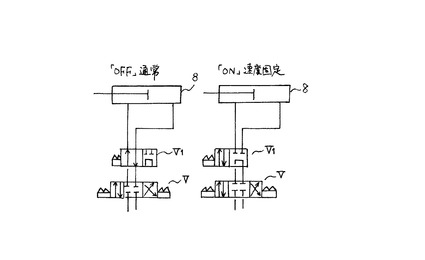
なお、オートクルーズは、図12に示すように、油圧シリンダ8と作動バルブVの間にオートクルーズ用バルブV1を設けて、このオートクルーズ用バルブV1で油圧シリンダ8のオイルの流れを止めて一定速度で走行するようにしても良い。
【0022】
センサ筒67には前進ペダル3と後進ペダル4を中立位置に戻すトーションバネ9を設けて、踏込みを止めると中立位置に戻り、踏込み時の踏込み抵抗としている。このトーションバネ9は変速センサ5のアーム85を回動するピン84を設けセンサアーム68を固着するセンサ筒67に設けているために、前進ペダル3と後進ペダル4の動きを正確に変速センサ5に伝える。
【0023】
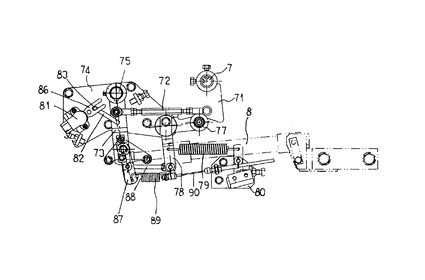
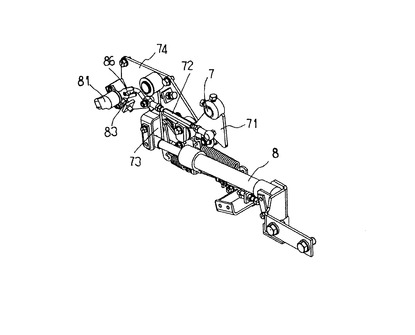
変速センサ5が検出する変速角すなわち前進ペダル3と後進ペダル4の踏込み程度でマイコンによって制御バルブを作動させて油圧シリンダ8でHST6のトラニオン軸7を回動して前後進での走行速度を制御しているのであるが、そのトラニオン軸7の作動構成を図10と図11で説明する。
【0024】
ミッションケース1の中間ケース18から突出するトラニオン軸7にカムプレート71を固着し、中間ケース18に取付けたシフトプレート74に立設した支軸75に枢支した作動アーム73と前記カムプレート71を長さ調整可能なロッド72で連結する。ミッションケース1の前ケース17に取付けた油圧シリンダ8のロッドを作動アーム73の先端に連結している。従って、油圧シリンダ8を伸縮させると、作動アーム73が回動し、それに伴って、ロッド72で連結したカムプレート71が回動し、トラニオン軸7を回動することになる。作動アーム73の先端側に油圧シリンダ8を連結し基部側にロッド72を連結することで油圧シリンダ8のロッドの動きを細かくしてカムプレート71に伝え、トラニオン軸7の回動角度を細かく調整できる。
【0025】
作動アーム73には、センサアーム82を後方へ向けて取り付け、このセンサアーム73のピン83にシフト角センサ81のアーム86を係合させて作動アーム73の回動即ちトラニオン軸7の回動角度を検出するようにしている。
【0026】
トラニオン軸7の中立保持機構は、シフトプレート74に枢支したL字状アーム78の片側アームを中間ケース18に取り付けたブラケット80との間に引掛けるばね79で他側アームに設けるローラ77をカムプレート71の端面に押し付けて、このローラ77がカムプレート71の端面凹部に入り込むとトラニオン軸7が中立位置に戻るようにしている。L字状アーム78のばね79を取付けた側のアーム先端にアーム87に連結したロッド88を連結し、アーム87にばね89とワイヤ90でブレーレバーに連結して、ブレーキレバーを引くと、アーム87とロッド88を介してL字状アーム78を回動し、ローラ77をカムプレート71の凹部に落とし込んでトラニオン軸7を中立位置に戻すようになる。
【0027】
なお、油圧シリンダ8の伸縮を制御する作動バルブは図示を省略するが、中間ケース18に取付けている。また、油圧シリンダ8を後ケース19側に取付けた構成にすると、飛び跳ねる泥土がシリンダケース内に侵入し難くなる。
【0028】
この実施例では、トラニオン軸7を回動するアクチュエータとして油圧シリンダ8を用いた構成を示しているが、油圧モータでトラニオン軸7を直接回動するような構成でも本発明を実施可能である。
【0029】
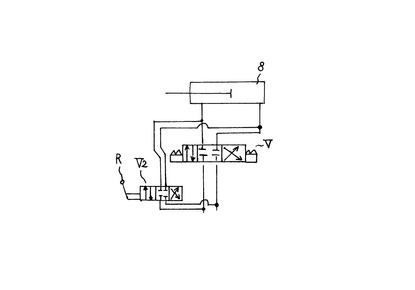
また、図13に示すように、油圧シリンダ8を作動させる作動バルブVの他に手動バルブV2を並列に設けて、電装品のトラブルで作動バルブVが動かない場合に手動バルブV2をレバーRで操作して走行を可能にすることも出来る。
【0030】
また、図示はしないが、油圧シリンダ8をバネで中立位置に戻るように構成すると共に、油圧シリンダ8と作動バルブVの間に圧抜きバルブを設けて、トラニオン軸7を中立に戻す際に圧抜きバルブで油圧シリンダ8のオイル圧を抜くようにすることも出来る。
【0031】
なお、トラニオン軸7が中立位置であるかは、前述の如く、シフト角センサ81で検出するが、ミッションケース1内の例えば第一ギヤ34の回転を検出するギヤ回転センサを設けて、このギヤ回転センサが検出する回転零とシフト角センサ81が検出するトラニオン軸7の中立位置で走行停止を判断するようにすれば、どちらかが故障しても確実に走行停止を判断できて安全である。
【0032】
リフトアーム50に土を耕すロータリを装着して後PTO出力軸42の駆動で該ロータリを回転する。このとき、ロータリを最上昇非作業位置から耕耘作業を開始する際や旋回でロータリを上昇させた後に耕耘作業を開始する際には、ロータリを回転させずに接地直前位置まで一旦降下させて安全を確認し、再度僅かに上昇させてロータリを回転開始してから降下して耕耘を行うように制御する。その際に、自動正逆回転制御にしておけば、逆回転でロータリが接地してすき込み始め、一定時間後に逆回転から正回転にゆっくりと切り換えて耕耘を続行する。
【0033】
また、正回転で耕耘を開始する場合には、ロータリが接地してダッシングが起こりそうであれば、ロータリを僅かに上昇させて降下する動作を行うか、又はロータリの回転を低下或いは停止させ再度回転させる動作をするか、又はロータリの駆動を断って空回りさせたりするか、又はロータリの回転を一時的に逆回転にするか、又は走行駆動のクラッチを切り前輪14と後輪15にブレーキをかけるか、又はロータリ駆動のクラッチを半クラッチにしたりロータリの回転を低下させた後に徐々に回転を上昇するようにする。
【0034】
ロータリを上昇させた状態で耕耘を開始する場合には、前記の制御の他に、直進走行を検出すると車速からロータリが接地するまでの時間を算出しリフトアーム50を降下させ、リフトアーム50のロワーリンクが水平になるとロータリの回転を始め、ロータリの接地までに後輪15にブレーキをかけて、ロータリをゆっくりと降下させて耕耘を開始することでダッシングを防ぐようにする。
【0035】
耕耘作業中に旋回する際には、旋回開始時にロータリを停止すると共に僅かに地上から浮かせ、旋回終了後にロータリの回転を開始し、降下させて耕耘を続行するように制御する。また、耕耘作業中にロータリの回転を正逆に切り換える際には、トラニオン軸7を低速側に回転して走行速度を低下させエンジン回転を低下することで、整地状態や仕上がり状態が良くなる。
【0036】
ロータリの降下速度を制御するにあたって、その降下速度を検出する手段としては加速度センサとドップラセンサが有り、加速度センサはロータリ上部かロータリカバーかリフトアーム50かロワーリンクに取り付け、ドップラセンサはロータリ側面、又はロータリカバー、又はリフトアーム50に装着する作業機にマイクロ波照射部を圃場面に向けて取り付ける構成とする。
【符号の説明】
【0037】
3,4 変速ペダル(3:前進ペダル 4:後進ペダル)
5 変速センサ
6 油圧無段変速装置
7 トラニオン軸
8 アクチュエータ(油圧シリンダ)
9 トーションバネ
66 枢支軸
68 センサアーム
【技術分野】
【0001】
この発明は、作業車両に関する。特に、トラクタ等の油圧駆動車両に用いられる油圧無段変速装置付トランスミッションの変速操作装置に関する。
【背景技術】
【0002】
農業用トラクタ等の油圧駆動車両では、車両の走行方向を前進にする前進ペダルと後進にする後進ペダルを操縦席のフロアパネルに並べて設けて、操縦者が前進ペダルか後進ペダルを適宜に踏込んで車両を前後進させる構成や一つの変速ペダルを前後に踏み込むことで前進或いは後進させる構成がある。例えば、特開2005−233260号公報には、ステップ上に設けた変速ペダルを前側に踏み込むと前進速度が速くなり後側に踏み込むと後進速度が速くなるように変速ペダルと油圧無段変速装置の変速操作軸の連動構成が記載されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2005−233260号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
前記の油圧駆動車両の変速操作装置で、前後進変速ペダルで直接油圧無段変速装置の変速操作軸を回動するのではなく、変速ペダルの動きを検出してその動きに応じて変速操作軸を油圧シリンダで回動するようにして変速ペダルを軽快に踏み込めるようにした構成が有るが、この構成では、変速ペダルの動きを正確に検出して油圧シリンダを制御する必要がある。
【0005】
本発明では、変速ペダルの動きを正確に検出して走行速度を精度よく制御する油圧駆動車両の変速操作装置を提供することを課題とする。
【課題を解決するための手段】
【0006】
上記本発明の課題は、次の技術手段により解決される。
請求項1に記載の発明は、機体を前後進させる前進変速ペダル3と後進変速ペダル4の動きをセンサアーム68の回動に変換し、該センサアーム68の回動を変速センサ5で検出し、該変速センサ5の検出信号で油圧無段変速装置6のトラニオン軸7をアクチュエータ8で回動させて走行速度を変速する作業車両において、前記センサアーム68の枢支軸66に設けたトーションバネ9の付勢力でセンサアーム68の位置を中立位置に戻すように構成したことを特徴とする作業車両としたものである。
【発明の効果】
【0007】
前進変速ペダル3,後進変速ペダル4から足を離すと、センサアーム68がトーションバネ9の弾発力で中立位置に戻り、これを変速センサ5が検出してアクチュエータ8を作動させて油圧無段変速装置6のトラニオン軸7を中立位置に戻して走行が停止される。このとき、トーションバネ9がセンサアーム68を直接中立位置に戻すので、変速ペダル3,4とセンサアーム68の連動途中に戻しバネを設けた構成と比較してセンサアーム68を確実に中立位置に戻す作用が有り、変速ペダル3,4による走行速度の制御を精度よく行える。
【図面の簡単な説明】
【0008】
【図1】油圧駆動車両(トラクタ)の平面図である。
【図2】油圧駆動車両(トラクタ)の側面図である。
【図3】ミッションケースの側断面図である。
【図4】油圧駆動車両(トラクタ)の一部拡大側面図である。
【図5】油圧駆動車両(トラクタ)の一部拡大平面図である。
【図6】変速ペダルの拡大側面図である。
【図7】変速ペダルの拡大平面図である。
【図8】変速ペダルの作用状態を示す一部の側面図である。
【図9】変速ペダルの作用状態を示す一部の側面図である。
【図10】変速機構の拡大側面図である。
【図11】変速機構の拡大斜視図である。
【図12】オートクルーズ(定速走行)の一部の油圧回路図
【図13】手動切替バルブを用いる場合の一部の油圧回路図
【発明を実施するための形態】
【0009】
以下、本発明の実施形態を図面に示す実施例を参照しながら説明する。
以下、本発明の実施の形態について、図面を参照しながら説明する。
図1と図2は、油圧駆動車両の実施例であるトラクタの全体を示す図面で、機体前側のエンジン10を搭載した原動部11とこの原動部11から後方へ延びるミッションケース1で車体を構成し、ミッションケース1上に緩衝材kを介してフロアパネル2を装架し、フロアパネル2の後側に作業者が搭乗して座る操縦席12を設け、機体の前後中間位置にステアリングハンドル13を立設し、底部のミッションケース1から左右に突設する駆動軸に前輪14と後輪15を装着している。
【0010】
ステアリングハンドル13の右側には前後進レバー16を設け、フロアパネル2上の右側に前進ペダル3と後進ペダル4を設け、フロアパネル2上の左側にクラッチペダル(図示省略)とブレーキペダル(図示省略)を設けている。フロアパネル2はミッションケース1の上側にマウントゴム等の緩衝材kで浮かせて取付けていて、左右中央部はミッションケース1の形状に沿って前上がりに形成している。このフロアパネル2の左右側部には、水平なサブフロアパネル94,95を張り出して一体的に取付けている。
【0011】
図示を省略するが、操縦席12の左側には、走行変速段を変更する主変速レバーや機体の後部に装着するロータリ等の作業機を駆動するPTO出力軸の駆動断続を行うPTOクラッチレバー等を設けている。
【0012】
次に、ミッションケース1内の動力伝動機構を図3で説明する。
エンジン10の出力を前輪14と後輪15と後PTO出力軸42と中間PTO出力軸43に増減速して伝動するミッションケース1は、前ケース17、中間ケース18、後ケース19の3つの中空ケースを一体に連結した中空のケースである。
【0013】
前ケース17内でエンジン10の出力軸20に連結したカップリング51へスプライン嵌合した入力軸21が油圧無段変速装置(以下、「HST」という)22の入力軸52に連結して動力が伝動される。
【0014】
HST6は可変容量型の油圧ポンプ53と固定容量型の油圧モータ54で構成され、油圧ポンプ53の可動斜板の傾きを変えることで油圧モータ54の回転を変更する。この可動斜板に連結するトラニオン軸7の回動角度は前記前後進レバー16と前進ペダル3と後進ペダル4の動きを検出してマイコンで作動する油圧シリンダ8によって変更されて、油圧モータ54のモータ出力軸24の回転が変速される。油圧ポンプ53に繋がるポンプ出力軸23の回転は入力軸52の回転数と同じである。
【0015】
ポンプ出力軸23の回転は、PTO第一中間軸55から第一ギヤ34と第二ギヤ35と第三ギヤ36を介してPTO第二中間軸39へ伝動され、このPTO第二中間軸39に直結したPTO入力軸40からPTO第一ギヤケース56とPTO第二ギヤケース57内のギヤ伝動41で変速及び動力分岐されて最終的に後PTO出力軸42と中間PTO出力軸43で回転が外部へ取り出されて、ロータリやモア等の作業機を駆動する。
【0016】
モータ出力軸24の回転出力は、第四ギヤ25と第五ギヤ26と第六ギヤ27を介して中継軸28へ伝動され、この中継軸28に直結のギヤ軸29を回転する。そして、ギヤ軸29の各ギヤにクラッチギヤ30を噛み合わせて走行軸31へ変速伝動し、走行軸31のベベルギヤ32を後輪駆動軸58のベベルギヤ33に噛み合わせて後輪駆動軸58を駆動する。また、走行軸31の回転は、第七ギヤ45とクラッチギヤ46を介して前輪駆動軸47を適宜に駆動する。
【0017】
後ケース19の後上部にリフトアーム50と油圧シリンダ49を備えた作業機作動ケース48を装着している。
図4と図5に示す如く、前進ペダル3と後進ペダル4を装着するブラケット60はフロアパネル2の底面側に取り付け、HST6のトラニオン軸7を回動する部材をミッションケース1の中間ケース18に取付け、油圧シリンダ8をミッションケース1の前ケース17に取付けている。
【0018】
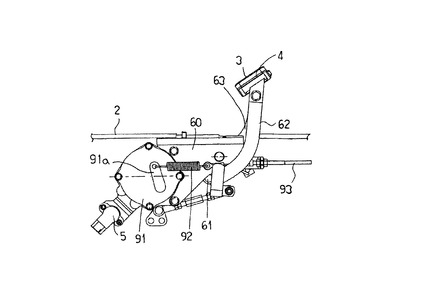
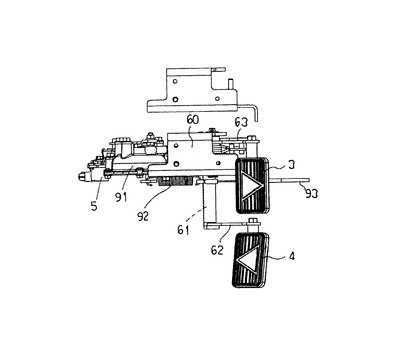
次に、前進ペダル3と後進ペダル4の構成を図6から図9で説明する。
前進ペダル3と後進ペダル4は、フロアパネル2の底面側に取り付けたブラケット60の枢支軸61に枢支したアーム62,63をフロアパネル2の上面に突出させ、そのアーム62,63の上端に取付けている。アーム62,63は枢支軸61にそれぞれ回動可能にすると共に、枢支軸61の後側でブラケット60に設ける別の枢支軸66に回動可能に枢支したセンサ筒67へリンク64,65で上下から連結している。従って、前進ペダル3と後進ペダル4は、一方を踏込むと他方が浮き上がる関係に連動することになり、同時に前進ペダル3と後進ペダル4を踏むことがあれば踏込めず、誤操作の防止になる。
【0019】
センサ筒67には先端にピン84を設けたセンサアーム68を固着し、前進ペダル3と後進ペダル4の踏込みによってピン84が枢支軸66を中心にして回動する。そして、このピン84の動きを検出するポテンショメータからなる変速センサ5のアーム85が係合している。この変速センサ5は、前進ペダル3と後進ペダル4の動きを一個で検出しているので、コストダウンになる。
【0020】
また、センサ筒67には回動を止めるブレーキ91を設けて、このブレーキ91のブレーキアーム91aにばね92とワイヤ93で連結するオートクルーズレバーを入りにすると、センサ筒67を固定してその固定位置での走行速度を保持するようにしている。
【0021】
なお、オートクルーズは、図12に示すように、油圧シリンダ8と作動バルブVの間にオートクルーズ用バルブV1を設けて、このオートクルーズ用バルブV1で油圧シリンダ8のオイルの流れを止めて一定速度で走行するようにしても良い。
【0022】
センサ筒67には前進ペダル3と後進ペダル4を中立位置に戻すトーションバネ9を設けて、踏込みを止めると中立位置に戻り、踏込み時の踏込み抵抗としている。このトーションバネ9は変速センサ5のアーム85を回動するピン84を設けセンサアーム68を固着するセンサ筒67に設けているために、前進ペダル3と後進ペダル4の動きを正確に変速センサ5に伝える。
【0023】
変速センサ5が検出する変速角すなわち前進ペダル3と後進ペダル4の踏込み程度でマイコンによって制御バルブを作動させて油圧シリンダ8でHST6のトラニオン軸7を回動して前後進での走行速度を制御しているのであるが、そのトラニオン軸7の作動構成を図10と図11で説明する。
【0024】
ミッションケース1の中間ケース18から突出するトラニオン軸7にカムプレート71を固着し、中間ケース18に取付けたシフトプレート74に立設した支軸75に枢支した作動アーム73と前記カムプレート71を長さ調整可能なロッド72で連結する。ミッションケース1の前ケース17に取付けた油圧シリンダ8のロッドを作動アーム73の先端に連結している。従って、油圧シリンダ8を伸縮させると、作動アーム73が回動し、それに伴って、ロッド72で連結したカムプレート71が回動し、トラニオン軸7を回動することになる。作動アーム73の先端側に油圧シリンダ8を連結し基部側にロッド72を連結することで油圧シリンダ8のロッドの動きを細かくしてカムプレート71に伝え、トラニオン軸7の回動角度を細かく調整できる。
【0025】
作動アーム73には、センサアーム82を後方へ向けて取り付け、このセンサアーム73のピン83にシフト角センサ81のアーム86を係合させて作動アーム73の回動即ちトラニオン軸7の回動角度を検出するようにしている。
【0026】
トラニオン軸7の中立保持機構は、シフトプレート74に枢支したL字状アーム78の片側アームを中間ケース18に取り付けたブラケット80との間に引掛けるばね79で他側アームに設けるローラ77をカムプレート71の端面に押し付けて、このローラ77がカムプレート71の端面凹部に入り込むとトラニオン軸7が中立位置に戻るようにしている。L字状アーム78のばね79を取付けた側のアーム先端にアーム87に連結したロッド88を連結し、アーム87にばね89とワイヤ90でブレーレバーに連結して、ブレーキレバーを引くと、アーム87とロッド88を介してL字状アーム78を回動し、ローラ77をカムプレート71の凹部に落とし込んでトラニオン軸7を中立位置に戻すようになる。
【0027】
なお、油圧シリンダ8の伸縮を制御する作動バルブは図示を省略するが、中間ケース18に取付けている。また、油圧シリンダ8を後ケース19側に取付けた構成にすると、飛び跳ねる泥土がシリンダケース内に侵入し難くなる。
【0028】
この実施例では、トラニオン軸7を回動するアクチュエータとして油圧シリンダ8を用いた構成を示しているが、油圧モータでトラニオン軸7を直接回動するような構成でも本発明を実施可能である。
【0029】
また、図13に示すように、油圧シリンダ8を作動させる作動バルブVの他に手動バルブV2を並列に設けて、電装品のトラブルで作動バルブVが動かない場合に手動バルブV2をレバーRで操作して走行を可能にすることも出来る。
【0030】
また、図示はしないが、油圧シリンダ8をバネで中立位置に戻るように構成すると共に、油圧シリンダ8と作動バルブVの間に圧抜きバルブを設けて、トラニオン軸7を中立に戻す際に圧抜きバルブで油圧シリンダ8のオイル圧を抜くようにすることも出来る。
【0031】
なお、トラニオン軸7が中立位置であるかは、前述の如く、シフト角センサ81で検出するが、ミッションケース1内の例えば第一ギヤ34の回転を検出するギヤ回転センサを設けて、このギヤ回転センサが検出する回転零とシフト角センサ81が検出するトラニオン軸7の中立位置で走行停止を判断するようにすれば、どちらかが故障しても確実に走行停止を判断できて安全である。
【0032】
リフトアーム50に土を耕すロータリを装着して後PTO出力軸42の駆動で該ロータリを回転する。このとき、ロータリを最上昇非作業位置から耕耘作業を開始する際や旋回でロータリを上昇させた後に耕耘作業を開始する際には、ロータリを回転させずに接地直前位置まで一旦降下させて安全を確認し、再度僅かに上昇させてロータリを回転開始してから降下して耕耘を行うように制御する。その際に、自動正逆回転制御にしておけば、逆回転でロータリが接地してすき込み始め、一定時間後に逆回転から正回転にゆっくりと切り換えて耕耘を続行する。
【0033】
また、正回転で耕耘を開始する場合には、ロータリが接地してダッシングが起こりそうであれば、ロータリを僅かに上昇させて降下する動作を行うか、又はロータリの回転を低下或いは停止させ再度回転させる動作をするか、又はロータリの駆動を断って空回りさせたりするか、又はロータリの回転を一時的に逆回転にするか、又は走行駆動のクラッチを切り前輪14と後輪15にブレーキをかけるか、又はロータリ駆動のクラッチを半クラッチにしたりロータリの回転を低下させた後に徐々に回転を上昇するようにする。
【0034】
ロータリを上昇させた状態で耕耘を開始する場合には、前記の制御の他に、直進走行を検出すると車速からロータリが接地するまでの時間を算出しリフトアーム50を降下させ、リフトアーム50のロワーリンクが水平になるとロータリの回転を始め、ロータリの接地までに後輪15にブレーキをかけて、ロータリをゆっくりと降下させて耕耘を開始することでダッシングを防ぐようにする。
【0035】
耕耘作業中に旋回する際には、旋回開始時にロータリを停止すると共に僅かに地上から浮かせ、旋回終了後にロータリの回転を開始し、降下させて耕耘を続行するように制御する。また、耕耘作業中にロータリの回転を正逆に切り換える際には、トラニオン軸7を低速側に回転して走行速度を低下させエンジン回転を低下することで、整地状態や仕上がり状態が良くなる。
【0036】
ロータリの降下速度を制御するにあたって、その降下速度を検出する手段としては加速度センサとドップラセンサが有り、加速度センサはロータリ上部かロータリカバーかリフトアーム50かロワーリンクに取り付け、ドップラセンサはロータリ側面、又はロータリカバー、又はリフトアーム50に装着する作業機にマイクロ波照射部を圃場面に向けて取り付ける構成とする。
【符号の説明】
【0037】
3,4 変速ペダル(3:前進ペダル 4:後進ペダル)
5 変速センサ
6 油圧無段変速装置
7 トラニオン軸
8 アクチュエータ(油圧シリンダ)
9 トーションバネ
66 枢支軸
68 センサアーム
【特許請求の範囲】
【請求項1】
機体を前後進させる前進変速ペダル(3)と後進変速ペダル(4)の動きをセンサアーム(68)の回動に変換し、該センサアーム(68)の回動を変速センサ(5)で検出し、該変速センサ(5)の検出信号で油圧無段変速装置(6)のトラニオン軸(7)をアクチュエータ(8)で回動させて走行速度を変速する作業車両において、前記センサアーム(68)の枢支軸(66)に設けたトーションバネ(9)の付勢力でセンサアーム(68)の位置を中立位置に戻すように構成したことを特徴とする作業車両。
【請求項1】
機体を前後進させる前進変速ペダル(3)と後進変速ペダル(4)の動きをセンサアーム(68)の回動に変換し、該センサアーム(68)の回動を変速センサ(5)で検出し、該変速センサ(5)の検出信号で油圧無段変速装置(6)のトラニオン軸(7)をアクチュエータ(8)で回動させて走行速度を変速する作業車両において、前記センサアーム(68)の枢支軸(66)に設けたトーションバネ(9)の付勢力でセンサアーム(68)の位置を中立位置に戻すように構成したことを特徴とする作業車両。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2011−110984(P2011−110984A)
【公開日】平成23年6月9日(2011.6.9)
【国際特許分類】
【出願番号】特願2009−267330(P2009−267330)
【出願日】平成21年11月25日(2009.11.25)
【出願人】(000000125)井関農機株式会社 (3,813)
【Fターム(参考)】
【公開日】平成23年6月9日(2011.6.9)
【国際特許分類】
【出願日】平成21年11月25日(2009.11.25)
【出願人】(000000125)井関農機株式会社 (3,813)
【Fターム(参考)】
[ Back to top ]