
作業車両

【課題】報知手段に頼らなくてもできるだけ簡易な手段で、複雑な走行制御機構の中から適切な走行制御機構を選択できるようにした走行車両を提供することである。
【解決手段】油圧式無段変速装置(HST)34のトラニオン軸30の回動角度を調整して最高速、車速緩慢度応答速度をそれぞれ設定する2つのダイヤル14a,14bとクルーズ走行速度を設定するクルーズ走行スイッチ14cを操縦席9の隣接位置であって車体1の前後方向に一列に配置し、ダイヤル、スイッチ14a,14b,14cの外側には作業機上げ下げ用のポジション用レバー18を配置したので、これらのダイヤル、スイッチ14a,14b,14cを設けない場合に比較して操縦性が良くなる。しかもダイヤル、スイッチ14a,14b,14cは操縦席9の隣接位置であって、車体1の前後方向に一列に並べて配置されるので、選択に迷うことがなく、目的のダイヤル、スイッチ14a,14b,14cを素早く入れることができる。
【解決手段】油圧式無段変速装置(HST)34のトラニオン軸30の回動角度を調整して最高速、車速緩慢度応答速度をそれぞれ設定する2つのダイヤル14a,14bとクルーズ走行速度を設定するクルーズ走行スイッチ14cを操縦席9の隣接位置であって車体1の前後方向に一列に配置し、ダイヤル、スイッチ14a,14b,14cの外側には作業機上げ下げ用のポジション用レバー18を配置したので、これらのダイヤル、スイッチ14a,14b,14cを設けない場合に比較して操縦性が良くなる。しかもダイヤル、スイッチ14a,14b,14cは操縦席9の隣接位置であって、車体1の前後方向に一列に並べて配置されるので、選択に迷うことがなく、目的のダイヤル、スイッチ14a,14b,14cを素早く入れることができる。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、農業用、建築用、運搬用等のトラクタなどの作業車両に関する。
【背景技術】
【0002】
電動モータや油圧サーボシリンダなどのアクチュエータを用いる静油圧式無段変速装置(HST)と噛合式変速装置からなる変速装置を備えたトラクタなどの作業車両が、例えば特開2008−279945号公報に記載されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−279945号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
引用文献1の作業車両では、最高速度を規定する最高速設定ダイヤルが作業機昇降レバーから離れた位置にあるので、最高速設定ダイヤルの操作性が悪いものとなっていた。すなわち、作業車両においては、作業機を昇降するレバーを頻繁に使用するので、この近くに最高速設定ダイヤルが備えられていないので、操作性が悪かった。
そこで、本発明の課題は、作業機昇降レバーの操作性の良い走行車両を提供することである。
【課題を解決するための手段】
【0005】
本発明の上記課題は、次の解決手段で解決される。
請求項1記載の発明は、車輪(2,3)とエンジン(5)を備えた車体(1)と、エンジン(5)の出力を調整するスロットルレバー(11)と、エンジン(5)からの出力に応じて油圧出力を変える油圧式無段変速装置(34)と、該油圧式無段変速装置(34)のトラニオン軸(30)の回動方向と角度を前進方向と後進方向に切り替える前後進レバー(10)と、前記油圧式無段変速装置(34)のトラニオン軸(30)の前進方向又は後進方向回動角度を調整して前進方向又は後進方向の油圧出力を踏み込み量に応じて調整するアクセルペダル(HSTペダル)(15)と、車体(1)の前方又は後方に昇降自在に装着した作業機(80)と、操縦者が着席する操縦席(9)を備えた走行車両において、トラニオン軸(30)の回動角度を調整して最高速の設定をする最高速設定ダイヤル(14a)と車速緩慢度応答速度を規制する車速緩慢度応答ダイヤル(14b)とクルーズ走行速度を設定するクルーズ走行スイッチ(14c)を操縦席(9)の隣接位置であって車体(1)の前後方向に一列に配置し、該最高速設定ダイヤル(14a)と車速緩慢度応答ダイヤル(14b)とクルーズ走行スイッチ(14c)の外側には作業機上げ下げ用のポジション用レバー(18)を配置したことを特徴とする走行車両である。
【0006】
請求項2記載の発明は、最高速設定ダイヤル(14a)、車速緩慢度応答ダイヤル(14b)及びクルーズ走行スイッチ(14c)を車体(1)の前側から後側に順に一列に配置したことを特徴とする請求項1記載の作業車両である。
【0007】
請求項3記載の発明は、エンジンストールガード用のスイッチ(75)を前記3つの最高速設定ダイヤル(14a)、車速緩慢度応答ダイヤル(14b)及びクルーズ走行スイッチ(14c)を配置した操縦席(9)の側部とは反対側の側部に配置したことを特徴とする請求項1記載の作業車両である。
【0008】
請求項4記載の発明は、前記2つのダイヤル(14a,14b)と1つのスイッチ(14c)を操縦席(9)に着席する操縦者の体格に合わせられるように操縦席(9)を前後方向に移動可能に配置したことを特徴とする請求項1記載の作業車両である。
【発明の効果】
【0009】
請求項1記載の発明によれば、最高速設定ダイヤル(14a)、車速緩慢度応答ダイヤル(14b)及びクルーズ走行スイッチ(14c)のいずれかを入りとするだけで、静油圧式無段変速装置(34)のトラニオン軸(30)の回転角度を前記ダイヤル(14a,14b)またはスイッチ(14c)により予め設定された3種類のいずれかに設定できるので、これらのダイヤルとスイッチ(14a,14b,14c)を設けない場合に比較して操縦性が良くなる。しかもダイヤルとスイッチ(14a,14b,14c)は操縦席(9)の隣接位置であって、車体(1)の前後方向に一列に並べて配置されるので、これらのダイヤルとスイッチ(14a,14b,14c)の選択に迷うことがなく、目的のダイヤル又はスイッチ(14a,14b,14c)を素早く入れることができる。
【0010】
また、これらのダイヤルとスイッチ(14a,14b,14c)の外側には作業機昇降用のポジション用レバー(18)が配置することで、頻繁に操作する作業機昇降用のポジション用レバー(18)と前記ダイヤルとスイッチ(14a,14b,14c)が近くにあるので、これらの操作手段の操作性が従来技術より向上する効果がある。
【0011】
請求項2記載の発明によれば、請求項1記載の発明の効果に加えて、操縦席(9)に隣接する位置であって、車体(1)の前後方向に一列に並べる順序としては前側から後側に最高速設定ダイヤル(14a)、車速緩慢度応答ダイヤル(14b)、クルーズ走行スイッチ(14c)の順に配置すると、クルーズ走行スイッチ(14c)が一番後端になることで、クルーズ走行スイッチ(14c)の入り操作を誤りなく行うことができる。
【0012】
請求項3記載の発明によれば、請求項1記載の発明の効果に加えて、エンジン(5)に負荷が掛かるトラニオン軸(30)の回転角度を小さくして車速を落とすことができる制御を実行するエンスト防止用のエンジンストールガードスイッチ(75)を最高速設定ダイヤル(14a)、車速緩慢度応答ダイヤル(14b)及びクルーズ走行スイッチ(14c)を配置した操縦席(9)に隣接した側部の反対側の側部に配置することで、最高速設定ダイヤル(14a)、車速緩慢度応答ダイヤル(14b)、クルーズ走行スイッチ(14c)と区別できて、エンジンストールガードスイッチ(75)の誤操作を防止できる。
【0013】
請求項4記載の発明によれば、請求項1記載の発明の効果に加えて、最高速設定ダイヤル(14a)、車速緩慢度応答ダイヤル(14b)及びクルーズ走行スイッチ(14c)は操縦者の体格に合わせて、操縦者が操作し易いように操縦席(9)の前後方向に移動可能にすることで、設置位置を調整できる。
【図面の簡単な説明】
【0014】
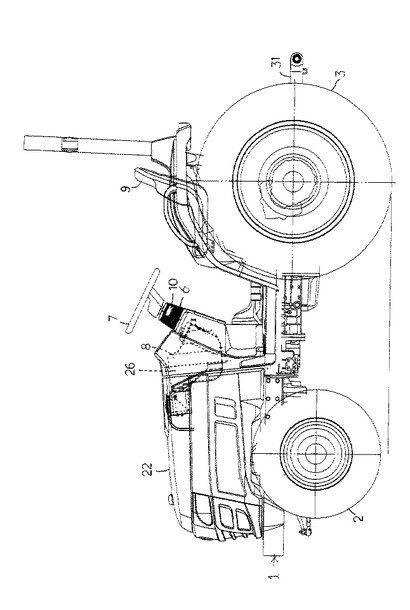
【図1】本発明の実施例のトラクタの側面図である。
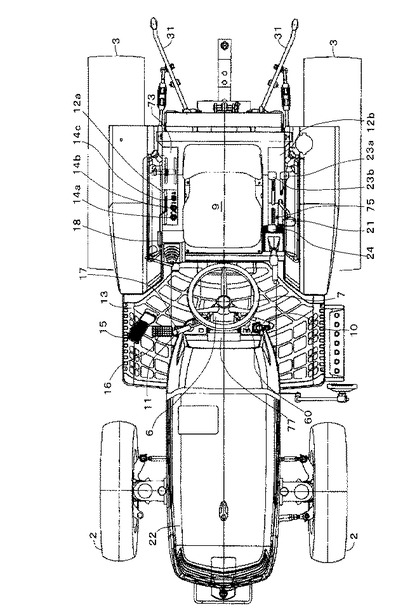
【図2】図1のトラクタの平面図である。
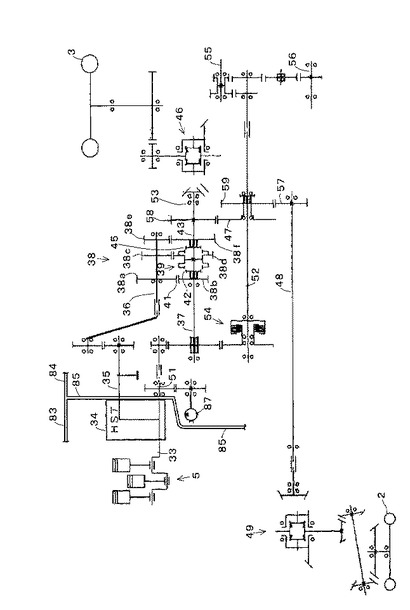
【図3】図1のトラクタの変速装置の動力伝動機構線図である。
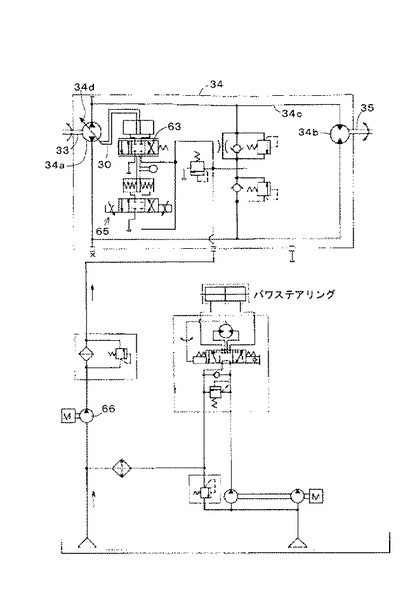
【図4】図1のトラクタの静油圧式無段変速装置の油圧回路図である。
【図5】図1のトラクタの制御ブロック図である。
【図6】図1のトラクタのレバーガイド部分の平面図である。
【図7】図1のトラクタのレバーガイド部分の側面図である。
【図8】図1のトラクタの操縦席付近の平面図である。
【図9】図1のトラクタのレバーガイド部分の斜視図である。
【図10】図1のトラクタの操縦席付近の平面図である。
【図11】図1のトラクタの操縦席付近の平面図である。
【図12】図1のトラクタの操縦席付近の平面図である。
【図13】図1のトラクタの操縦席付近の平面図である。
【図14】図1のトラクタの操縦席付近の平面図である。
【図15】本発明の別実施例のトラクタの側面図である。
【図16】図15のトラクタの変速装置の分解図である。
【発明を実施するための形態】
【0015】
以下、図面に基づき、本発明の好ましい実施の形態について説明する。
作業車両の一例としてトラクタを例に以下説明する。図1に全体側面図、図2に図1のトラクタの平面図(キャビンを除く)を示している。図3は図1のトラクタの変速装置の動力伝動機構線図、図4は本実施例のトラクタの静油圧式無段変速装置の油圧回路図であり、図5は本実施例のトラクタの制御ブロック図である。
なお、本明細書において作業車両の前進方向に向かって左右方向をそれぞれ左、右といい、前進方向を前、後進方向を後ろという。
【0016】
図1、図2に示すトラクタは走行車体1の前後部に前輪2,2と後輪3,3を備え、車体1の前部に搭載したエンジン5の回転動力を伝動ケース内の変速装置によって適宜減速して、これらの前輪2,2と後輪3,3に伝えるように構成している。
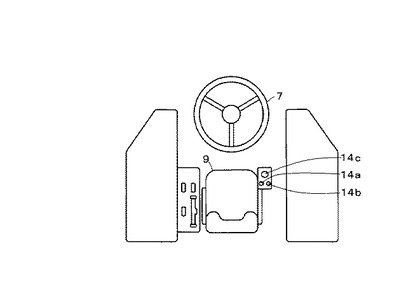
車体1の中央のハンドルポスト6にはステアリングハンドル7が支持され、その後方には座席9が設けられている。
【0017】
図1に示すように、燃料タンク8をボンネット22内に収め、燃料タンク8本体の後側はハンドルポスト6内に収納状態となっている。
また、ステアリングハンドル7の下方には車体1の進行方向を前後方向に切り替える前後進レバー10が設けられている。この前後進レバー10を前側に移動させると車体1は前進し、後方へ移動させると後進する。またハンドルポスト6を挟んで前後進レバー10の反対側にはエンジン回転数を変更するスロットルレバー11が設けられ、またステップフロア13の右コーナー部にはアクセルペダル15と左右のブレーキペダル16,17が配置されている。前後進レバー10の前側には緊急停止スイッチ60を設ける。前記アクセルペダル15は、基本的には路上走行時に使用し、その踏み込み量に応じてエンジン回転数が上昇すると共に、アクセルペダル15の踏み込み量をアクセルペダルポテンショ76(図5)が検出し、このアクセルペダルポテンショ76の検出値に応じて静圧式無段変速装置(HST)34のトラニオン軸30(図5の制御ブロック図にのみ図示)の回動角度を変更させることができる。該トラニオン軸30の回動角度により斜板34d(図4)の傾斜角度を変化させてHSTの出力を無段状に変更させることができる。
【0018】
前記スロットルレバー11はエンジン回転数を変更するもので、作業走行時に使用する。スロットルレバー11は操作した位置で手を離してもその位置が保持される構成である。
また、操縦席9の左側に低速、中速、高速及び中立のいずれかの位置を選択できる副変速レバー21が配置され、その後方に前輪2と後輪3の間に装着しているミッド作業機(モーア等)のPTO軸の入り切りと変速を行うミッドPTO変速レバー23aと、機体後部に装着した作業機(モーア、ロータリ、除雪機等)のPTO軸の入り切りと変速を行うリヤPTO変速レバー23bが設けられている。また、車体1の後方には作業機(図示せず)を連結する前記リンク31が設けられている。
【0019】
エンジン5の回転動力はHST入力軸33からHST34に伝達される。また、HST入力軸33から導入された動力により図4に示す油圧ポンプ34aを作動させて、油圧ポンプ34aに設けられた斜板34dの傾斜角度に応じた圧油を油圧閉回路34cから油圧モータ34bに供給し、該油圧モータ34bにより走行出力軸35を駆動させて噛合式の変速装置38へ動力を伝達させる。
【0020】
図3に示すように、噛合式の変速装置38の副変速クラッチ39は、変速軸43の回転がデフ装置46を介して後輪3が副変速高速段の走行速度で駆動される。
前記HST34から出力された動力は、走行出力軸35から回転軸36に伝達される。変速装置38による変速段は次のように設定される。すなわち副変速高速(3速)は、ギヤ38aからギヤ38bで変速された動力が変速軸43へ伝達される。また、副変速中速(2速)は、ギヤ38cからギヤ38dで変速された動力が変速軸43へ伝達され、副変速低速(1速)は、ギヤ38eからギヤ38fで変速された動力が変速軸43へ伝達される。これら副変速の3段変速は、副変速レバー21を操作してシフタ39が左右にスライドすることで切り替わる。変速軸43の回転がデフ装置46を介して後輪3が副変速中速段の走行速度で駆動される。
【0021】
一方、HST入力軸33から容量可変式の油圧ポンプ34a(図4)に入力された動力はポンプ出力軸51(図3にのみ図示)からPTO油圧クラッチ54などを経由してPTO軸52に設けられたPTO用の駆動系に伝達される。PTO軸52にはリヤPTO軸55とミッドPTO軸56に動力伝達される。
また、変速軸43の副変速下手側のギヤ58からPTO軸52のギヤ47、このギヤ47と一体のギヤ59を経由して、前輪出力軸48のギヤ57に伝達され、前輪2が駆動される。
【0022】
さらに、車体1の前方又は後方にローダ80(図15参照)を取り付けたときはローダアーム81でローダ80を昇降させる。
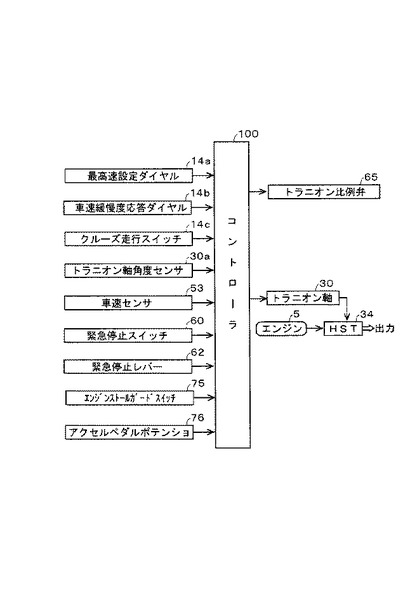
また静油圧式無段変速装置(HST)34はトラニオン軸30(図4,図5)の回動角度、すなわち斜板34dの回動角度によりその回転数が決まり、詳細な説明は省略するが、アクセルペダル15の踏み込み量がアクセルペダルポテンンショ76で検出されると、アクセルペダルポテンンショ76の検出値に応じてトラニオン軸30の作動量がコントローラ100により自動的に設定され、静油圧式無段変速装置(HST)34の油圧出力回転数がコントローラ100により自動的に適切な値に設定される。
【0023】
なお、前後進切替レバー10の前進側又は後進側への切り替えで前後進切替レバー10の回動基部に設けている図示しない切替スイッチを作動させる等の方法で、制御装置100が静油圧式無段変速装置(HST)34のトラニオン軸30の回動方向を前進側又は後進側に設定する。このトラニオン軸30の回動方向は、切替弁63(図4)で決定する。そして、トラニオン軸30の回動角度が、アクセルペダル15の踏み込み量に応じて変化する。トラニオン軸30の回動角度は、比例弁65への電流量で決定する。
【0024】
さらに、バルブスティック時などの緊急時には、操縦部にあるブレーキペダル16,17を目一杯踏み込むと強制的にHSTトラニオン軸30をニュートラルに戻すことができる。ブレーキ16,17を踏むということは、アクセルペダル15から足を離しているので、トラニオン軸30は中立に戻る。このときトラニオン軸30が自然に戻るまたは強制的に高速で戻すかは、機種により異なる。
【0025】
図4に示す電子サーボHST34の油圧回路34cにおいて、不純物でバルブなどが詰まる(バルブスティック)際には、操縦部にある緊急停止レバー62(図5のみに図示)を引いて、HST34のトラニオン軸30をニュートラルに戻す。
【0026】
従来は、緊急時にHSTトラニオン軸30をニュートラルに戻す構成は知られているが、バルブスティック時にはスプール位置が固定されて走行速度が固定されてしまう。そこで緊急時には手動で緊急停止レバー62を引いてトラクタを停止させる。
【0027】
上記した2種類の手動操作部材(緊急停止レバー62とブレーキペダル16,17)で緊急時にトラクタを停止することができる。
また、緊急停止スイッチ60(図5にのみ図示)を押すと、エンジンが停止して、衝突等の事故を避ける場合に利用される。
【0028】
図2に示すトラクタの全体平面図に示すように、ハンドル7の回りのハンドルポスト6にはスロットルレバー11と前後進レバー10が左右に配置されている。スロットルレバー11の右側のステップフロア13上にはアクセルペダル15が配置されている。アクセルペダル15はHST34のトラニオン軸30の回転角度とエンジン回転数の調整を行うことができる。
【0029】
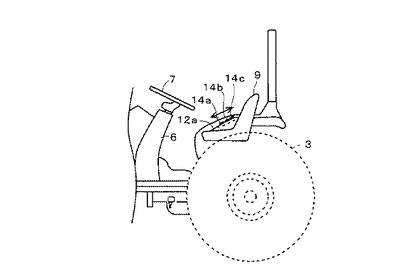
さらに操縦席9の右側のレバーガイド12aには最高速設定ダイヤル14a、車速緩慢度応答ダイヤル14b及びクルーズ走行スイッチ14cが前側から後側に順に一列に配置され、該ダイヤル14a,14bとスイッチ14cの外側には作業機上げ下げ用のポジション用レバー18が配置されている。なお、前記ダイヤル14a,14bとスイッチ14cは前後方向に一列に順に配置されていれば良く、ダイヤル14a,14bとスイッチ14cの配列順序にはこだわらない。また、ダイヤル、スイッチ14a,14b,14cの外側には作業機上げ下げ用のポジション用レバー18を配置したので、これらのダイヤル、スイッチ14a,14b,14cを設けない場合に比較して操縦性が良くなる。
【0030】
最高速設定ダイヤル14aはダイヤル式であり、トラニオン軸30の回動角度を調整して車体の最高速度を規制するものである。したがって、アクセルペダル15を最大まで踏み込んでも、最高速設定ダイヤル14aで規制している速度までしか出せない構成としている。
【0031】
車速緩慢度応答ダイヤル14bもトラニオン軸30の回動速度を変更設定するものである。アクセルペダル15を踏むと、アクセルペダルポテンショ76で目標となる速度、すなわち目標となるトラニオン軸30の回動角度が決まるが、この目標となるトラニオン軸30の回動角度の位置までに、トラニオン軸30が到達する時間を変更するものである。例えば、車速緩慢度応答ダイヤル14bを鈍感(スロー)にしておくと、アクセルペダル15を素早く踏んでも、トラニオン軸30の目標となる回動角度への到達時間がゆっくりとなるので、ゆっくりと加速していく構成である。この目標位置への到達時間の変更は、比例弁65(図4)への電流のデューティー比を変更することで行う。
【0032】
クルーズ走行スイッチ14cは入り切り式のスイッチであり、ある特定の速度で走行しているときにこのクルーズ走行スイッチ14cを入りにすると、アクセルペダル15から足を離してもそのときの速度を維持する構成である。
【0033】
また操縦席9の左側には副変速レバー21、ミッドPTOレバー23a、リヤPTOレバー23b及び4WDレバー24が配置されている。4WDレバー24の外側には副変速レバー21が配置され、リヤPTOレバー23bの外側にはミッドPTOレバー23aが配置されている。
【0034】
図6に拡大平面図で示すように、最高速設定ダイヤル14aは、トラニオン軸30の回転角度を、HST34の出力を最高速相当に変更するものであり、所定の最高速を操縦者が決めることができるように、例えば約15〜30km/hの範囲にダイヤル式に変更できる構成としている。車速緩慢度応答ダイヤル14bは、アクセルペダル15の踏みに応じたトラニオン軸30の目標回動角度の位置までに、トラニオン軸30が到達する時間を変更するものである。この車速緩慢度応答ダイヤル14bによる所定の車速に達するまでの時間は、例えば約3秒間から約6秒間までとダイヤル式に変更できる構成としている。
【0035】
また、クルーズ走行スイッチ14cは該クルーズ走行スイッチ14cを入れたときの車速に合致するように、トラニオン軸30の回転角度を一定とし、従ってHST34の出力が一定に保持されて車速が一定に保持される。クルーズ走行スイッチ14cを入れた後でアクセルペダル15から足を離してもそのときの速度を維持する。
【0036】
このように最高速設定ダイヤル14a、車速緩慢度応答ダイヤル14b及びクルーズ走行スイッチ14cのいずれかを入りとするだけで、HST34のトラニオン軸30の回転角度を予め設定された3種類のいずれかに設定できるので、これらのダイヤル14a,14bとスイッチ14cを設けない場合に比較して操縦性が良くなる。しかもダイヤル14a,14bとスイッチ14cは操縦席9の隣接位置に前後方向に一列に並べて配置されるので、これらのダイヤル14a,14bとスイッチ14cの選択に迷うことがなく、目的のダイヤル、スイッチを素早く入れることができる。
【0037】
また、これらのダイヤル14a,14bとスイッチ14cの外側には作業機昇降用のポジション用レバー18が配置することで、これらのダイヤル、スイッチ14a,14b,14cを作業機昇降用のポジション用レバー18の直近に設けない場合に比較して操縦性が良くなる。
【0038】
これら3つのダイヤル、スイッチ14a,14b,14cはまとめてサーボスイッチとも呼ばれているが、操縦席9に隣接する右のレバーガイド12aに前後方向に一列に並べる順序としては前側から後側に最高速設定ダイヤル14a、クルーズ走行スイッチ14c及び車速緩慢度応答ダイヤル14bの順に配置してもよい。
【0039】
図7に操縦席付近の概略側面図を示すように、これらダイヤル14a,14bとスイッチ14cは操縦者の体格に合わせて右のレバーガイド12aに設けた長穴に挿入し、操縦席9の前後方向に移動可能にすることで、操縦者が操作し易い設置位置を調整できる。
【0040】
エンジン5に負荷が掛かるトラニオン軸30の回転角度を小さくして車速を落とすことができる制御を実行するエンスト防止用のエンジンストールガードスイッチ75(図2)を操縦席9の左のレバーガイド12bに設けているので、そのスイッチ75の操作性がよい。なお、四輪駆動レバー24は、入りか切り用のレバーであり、レバーストロークの中間位置にレバー24は停止しないので、エンスト防止用のエンジンストールガードスイッチ75の操作の邪魔にはならない。また、前記3つのダイヤル14a,14bとスイッチ14cとは性質の異なるエンスト防止用のエンジンストールガードスイッチ75をダイヤル14a,14bとスイッチ14cから離して設けることで、互いに誤操作を防止できる。
【0041】
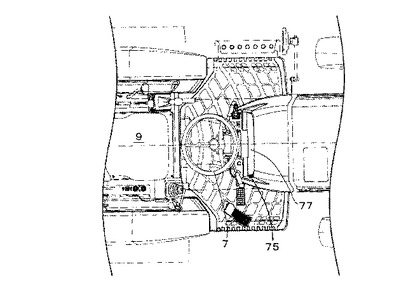
図8の作業車両の一部平面図に示すように、エンスト防止用のエンジンストールガードスイッチ75を操縦席9のハンドル7に前方の壁面にある操作パネル77のエンジンメータ表示部の近くに配置しても良い。この場合は運転者の視界に入りやすいので、計器類とともに常時スイッチ75の位置を把握できて操作性がよい。
【0042】
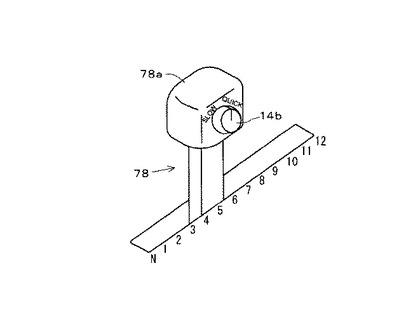
図9の操縦部の部分斜視図に最高速設定ダイヤル14aの代わりに最高速レバー78を設け、該最高速レバー78のグリップ78aにダイヤル式の車速緩慢度応答ダイヤル14bを設けても良い。この場合は最高速を変更しながら目標速度への到達時間を容易に変更可能となる。
【0043】
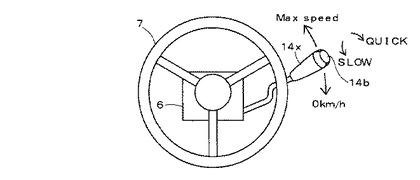
図10のハンドル部分の平面図に示すように、最高速設定ダイヤル14aの代わりに最高速レバー14xをハンドルポスト7aに基部を操作可能に設け、最高速レバー14xのグリップ部の頂部にダイヤル式の車速緩慢度応答ダイヤル14bを設けても良い。この場合は操縦性が良くなる効果がある。
【0044】
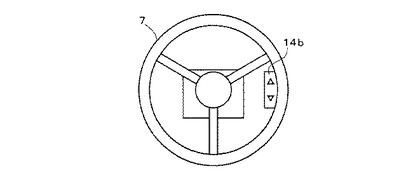
図11のハンドル部分の平面図に示すように、ハンドル7のサークルの内側に切替スイッチ式の車速緩慢度応答手段14bを設けても良い。この場合も操縦性が良くなる効果がある。
【0045】
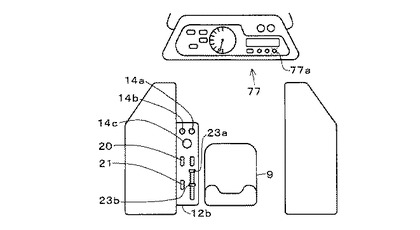
図12に操舵室の一部平面図を示すように、作業車両の操縦席9を中心として、その左側のレバーガイド12bの最前部に最高速設定ダイヤル14aと車速緩慢度応答ダイヤル14bを配置し、それらダイヤル14a,14bの後ろにクルーズ走行スイッチ14cを配置する構成を採用しても良い。
さらにこれらのダイヤル14a,14bとスイッチ14cの後ろに副変速レバー21、ミッドPTOレバー23aとリヤPTOレバー23b等を配置する構成としても良い。
【0046】
このようなレイアウトにするとダイヤル14a,14bとスイッチ14cに手が届くのでトラクタの緊急停止時に対応できる。また、クルーズ走行スイッチ14cが入りになると操縦席9の前方にある操作パネル77に設けられたクルーズモニタランプ77aが点灯するようにしておけば、操縦者はクルーズコントロール中であることが目視できる。
またクルーズモニタランプ77aとクルーズ走行スイッチ14cの握り部分を点灯可能な構成にしておき、クルーズ走行スイッチ14cが入りになると、該クルーズ走行スイッチ14cそのものが点灯する構成にしてもよい。
【0047】
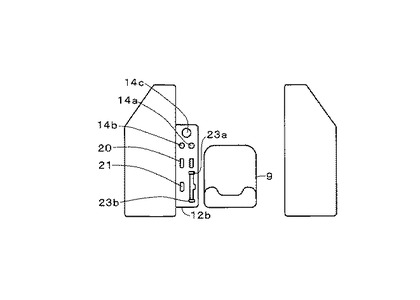
図13に操舵室の一部平面図を示すように、作業車両の操縦席9を中心として、その左側のレバーガイド12bの最前部にクルーズ走行スイッチ14cを配置し、その後ろに最高速設定ダイヤル14aと車速緩慢度応答ダイヤル14bを配置してもよい。
なお、これらのダイヤル14a,14bとスイッチ14cの後ろに主変速レバー20や副変速レバー21、ミッドPTOレバー23aとリヤPTOレバー23b等を配置する構成としても良い。このようなレイアウトにすると、速度の変更と前記ダイヤル14a,14bとスイッチ14cの相互の操作性が従来より向上する。
【0048】
図14に操舵室の一部平面図を示すように、作業車両の操縦席9の右側の肘掛けアームにクルーズ走行スイッチ14cを先頭として、その後ろに最高速設定ダイヤル14aと車速緩慢度応答ダイヤル14bを並列配置しても良い。
このような構成により、右利きの操縦者が右腕をあまり動かすことなく、これらのダイヤル14a,14bとスイッチ14cを容易に操作できる。
【0049】
図15の全体側面図に示すように、トラクタの前方にローダ80を、ローダアーム81を介して昇降自在に装着している場合に、ローダ80に大きな荷物が載っていてローダ80に大きな負荷が掛かっていることを検出しようとすると、高価な負荷検出センサ82を取り付ける必要がある。そのような場合に対処するために、次のような方法を用いることでローダ80の作業が容易に行える。
【0050】
すなわち、トラニオン軸30の回動角度を検知できるトラニオン軸(回動)角度センサ30aと変速装置の出力軸43の回転速度センサ(車速センサ)53を設けていると、出力軸43の回転速度センサ53で検出される車両走行速度が低下する場合に、トラニオン軸(回動)角度センサ30aの検出値も設定値より低下することがある。このような事態は、ローダ80に大きな荷物や土砂が載り、ローダ80に負荷が掛かり過ぎていると判断できるので、ローダアーム81を上げるようにトランスミッションの油圧回路の油圧ポンプ66(図4)のパワーアップをすることができる。
また前記したようにローダアーム81を上昇させた後でトラクタを後退させる場合には後進時の最高設定速度まで加速を緩やかに行うように変速装置の走行制御を行うことで、燃費の改善が図れる。
また、大きな荷物や土砂をローダ80から放出する時には、バックをするので、このバックの判定があると、エンジン回転数を最大限上げてトラクタの走行速度を速くすることで、作業が速やかに進行する。
【0051】
図3にHSTチャージ用トロコイドポンプ87を示す。HST34の取付プレート85をフロントケース83とミッドケース84の間に挟み込み固定している。そして、HST34から出ているPTO軸52を駆動するポンプ出力軸51(図3)の直後から前記HSTチャージ用トロコイドポンプ87を駆動する構成としている。これにより、高効率でHSTチャージ用トロコイドポンプ87が駆動されてHST34内に油圧がチャージされるようになる。
また、前記取付プレート85により、ミッドケース84内のオイルがフロントケース83内に入ってくるのを防止でき、HST34が油漬けになるのを防いでいる。
【符号の説明】
【0052】
1 走行車体 2 前輪
3 後輪 5 エンジン
6 ハンドルポスト 7 ステアリングハンドル
8 燃料タンク 9 操縦席(座席)
10 前後進レバー 11 スロットルレバー
12a,12b レバーガイド 13 ステップフロア
14a 最高速設定ダイヤル 14b 車速緩慢度応答ダイヤル
14c クルーズ走行スイッチ 14x 最高速レバー
15 アクセルペダル 16,17 ブレーキペダル
18 作業機上げ下げ用のポジション用レバー
20 主変速レバー 21 副変速レバー
22 ボンネット 23a ミッドPTO変速レバー
23b リヤPTO変速レバー
24 四輪駆動レバー(4WDレバー)
30 トラニオン軸 30a トラニオン軸角度センサ
31 リンク 33 HST入力軸
34 静油圧式無段変速装置(HST)
34a 油圧ポンプ 34b 油圧モータ
34c 油圧閉回路 34d 斜板
35 走行出力軸 36 回転軸
37 伝動軸 38 噛合式変速装置
38a〜38f 副変速ギヤ 39 副変速クラッチ
41 ギヤ 42 高速段ギヤ
43 変速軸 45 ギヤ
46 デフ装置 47 ギヤ
48 前輪出力軸(4WD軸) 49 デフ装置
51 ポンプ出力軸 52 PTO軸
53 回転速度センサ(車速センサ) 54 PTO油圧クラッチ
55 リヤPTO軸 56 ミッドPTO軸
57〜59 ギヤ 60 緊急停止スイッチ
62 緊急停止レバー 63 切替弁
65 比例弁 66 油圧ポンプ
75 エンジンストールガードスイッチ
76 アクセルペダルポテンショ 77 操作パネル
77a クルーズモニタランプ 78 最高速レバー
78a グリップ 80 ローダ
81 ローダアーム 82 負荷検出センサ
83 フロントケース 84 ミッドケース
85 取付プレート
87 HSTチャージ用トロコイドポンプ
100 コントローラ
【技術分野】
【0001】
この発明は、農業用、建築用、運搬用等のトラクタなどの作業車両に関する。
【背景技術】
【0002】
電動モータや油圧サーボシリンダなどのアクチュエータを用いる静油圧式無段変速装置(HST)と噛合式変速装置からなる変速装置を備えたトラクタなどの作業車両が、例えば特開2008−279945号公報に記載されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−279945号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
引用文献1の作業車両では、最高速度を規定する最高速設定ダイヤルが作業機昇降レバーから離れた位置にあるので、最高速設定ダイヤルの操作性が悪いものとなっていた。すなわち、作業車両においては、作業機を昇降するレバーを頻繁に使用するので、この近くに最高速設定ダイヤルが備えられていないので、操作性が悪かった。
そこで、本発明の課題は、作業機昇降レバーの操作性の良い走行車両を提供することである。
【課題を解決するための手段】
【0005】
本発明の上記課題は、次の解決手段で解決される。
請求項1記載の発明は、車輪(2,3)とエンジン(5)を備えた車体(1)と、エンジン(5)の出力を調整するスロットルレバー(11)と、エンジン(5)からの出力に応じて油圧出力を変える油圧式無段変速装置(34)と、該油圧式無段変速装置(34)のトラニオン軸(30)の回動方向と角度を前進方向と後進方向に切り替える前後進レバー(10)と、前記油圧式無段変速装置(34)のトラニオン軸(30)の前進方向又は後進方向回動角度を調整して前進方向又は後進方向の油圧出力を踏み込み量に応じて調整するアクセルペダル(HSTペダル)(15)と、車体(1)の前方又は後方に昇降自在に装着した作業機(80)と、操縦者が着席する操縦席(9)を備えた走行車両において、トラニオン軸(30)の回動角度を調整して最高速の設定をする最高速設定ダイヤル(14a)と車速緩慢度応答速度を規制する車速緩慢度応答ダイヤル(14b)とクルーズ走行速度を設定するクルーズ走行スイッチ(14c)を操縦席(9)の隣接位置であって車体(1)の前後方向に一列に配置し、該最高速設定ダイヤル(14a)と車速緩慢度応答ダイヤル(14b)とクルーズ走行スイッチ(14c)の外側には作業機上げ下げ用のポジション用レバー(18)を配置したことを特徴とする走行車両である。
【0006】
請求項2記載の発明は、最高速設定ダイヤル(14a)、車速緩慢度応答ダイヤル(14b)及びクルーズ走行スイッチ(14c)を車体(1)の前側から後側に順に一列に配置したことを特徴とする請求項1記載の作業車両である。
【0007】
請求項3記載の発明は、エンジンストールガード用のスイッチ(75)を前記3つの最高速設定ダイヤル(14a)、車速緩慢度応答ダイヤル(14b)及びクルーズ走行スイッチ(14c)を配置した操縦席(9)の側部とは反対側の側部に配置したことを特徴とする請求項1記載の作業車両である。
【0008】
請求項4記載の発明は、前記2つのダイヤル(14a,14b)と1つのスイッチ(14c)を操縦席(9)に着席する操縦者の体格に合わせられるように操縦席(9)を前後方向に移動可能に配置したことを特徴とする請求項1記載の作業車両である。
【発明の効果】
【0009】
請求項1記載の発明によれば、最高速設定ダイヤル(14a)、車速緩慢度応答ダイヤル(14b)及びクルーズ走行スイッチ(14c)のいずれかを入りとするだけで、静油圧式無段変速装置(34)のトラニオン軸(30)の回転角度を前記ダイヤル(14a,14b)またはスイッチ(14c)により予め設定された3種類のいずれかに設定できるので、これらのダイヤルとスイッチ(14a,14b,14c)を設けない場合に比較して操縦性が良くなる。しかもダイヤルとスイッチ(14a,14b,14c)は操縦席(9)の隣接位置であって、車体(1)の前後方向に一列に並べて配置されるので、これらのダイヤルとスイッチ(14a,14b,14c)の選択に迷うことがなく、目的のダイヤル又はスイッチ(14a,14b,14c)を素早く入れることができる。
【0010】
また、これらのダイヤルとスイッチ(14a,14b,14c)の外側には作業機昇降用のポジション用レバー(18)が配置することで、頻繁に操作する作業機昇降用のポジション用レバー(18)と前記ダイヤルとスイッチ(14a,14b,14c)が近くにあるので、これらの操作手段の操作性が従来技術より向上する効果がある。
【0011】
請求項2記載の発明によれば、請求項1記載の発明の効果に加えて、操縦席(9)に隣接する位置であって、車体(1)の前後方向に一列に並べる順序としては前側から後側に最高速設定ダイヤル(14a)、車速緩慢度応答ダイヤル(14b)、クルーズ走行スイッチ(14c)の順に配置すると、クルーズ走行スイッチ(14c)が一番後端になることで、クルーズ走行スイッチ(14c)の入り操作を誤りなく行うことができる。
【0012】
請求項3記載の発明によれば、請求項1記載の発明の効果に加えて、エンジン(5)に負荷が掛かるトラニオン軸(30)の回転角度を小さくして車速を落とすことができる制御を実行するエンスト防止用のエンジンストールガードスイッチ(75)を最高速設定ダイヤル(14a)、車速緩慢度応答ダイヤル(14b)及びクルーズ走行スイッチ(14c)を配置した操縦席(9)に隣接した側部の反対側の側部に配置することで、最高速設定ダイヤル(14a)、車速緩慢度応答ダイヤル(14b)、クルーズ走行スイッチ(14c)と区別できて、エンジンストールガードスイッチ(75)の誤操作を防止できる。
【0013】
請求項4記載の発明によれば、請求項1記載の発明の効果に加えて、最高速設定ダイヤル(14a)、車速緩慢度応答ダイヤル(14b)及びクルーズ走行スイッチ(14c)は操縦者の体格に合わせて、操縦者が操作し易いように操縦席(9)の前後方向に移動可能にすることで、設置位置を調整できる。
【図面の簡単な説明】
【0014】
【図1】本発明の実施例のトラクタの側面図である。
【図2】図1のトラクタの平面図である。
【図3】図1のトラクタの変速装置の動力伝動機構線図である。
【図4】図1のトラクタの静油圧式無段変速装置の油圧回路図である。
【図5】図1のトラクタの制御ブロック図である。
【図6】図1のトラクタのレバーガイド部分の平面図である。
【図7】図1のトラクタのレバーガイド部分の側面図である。
【図8】図1のトラクタの操縦席付近の平面図である。
【図9】図1のトラクタのレバーガイド部分の斜視図である。
【図10】図1のトラクタの操縦席付近の平面図である。
【図11】図1のトラクタの操縦席付近の平面図である。
【図12】図1のトラクタの操縦席付近の平面図である。
【図13】図1のトラクタの操縦席付近の平面図である。
【図14】図1のトラクタの操縦席付近の平面図である。
【図15】本発明の別実施例のトラクタの側面図である。
【図16】図15のトラクタの変速装置の分解図である。
【発明を実施するための形態】
【0015】
以下、図面に基づき、本発明の好ましい実施の形態について説明する。
作業車両の一例としてトラクタを例に以下説明する。図1に全体側面図、図2に図1のトラクタの平面図(キャビンを除く)を示している。図3は図1のトラクタの変速装置の動力伝動機構線図、図4は本実施例のトラクタの静油圧式無段変速装置の油圧回路図であり、図5は本実施例のトラクタの制御ブロック図である。
なお、本明細書において作業車両の前進方向に向かって左右方向をそれぞれ左、右といい、前進方向を前、後進方向を後ろという。
【0016】
図1、図2に示すトラクタは走行車体1の前後部に前輪2,2と後輪3,3を備え、車体1の前部に搭載したエンジン5の回転動力を伝動ケース内の変速装置によって適宜減速して、これらの前輪2,2と後輪3,3に伝えるように構成している。
車体1の中央のハンドルポスト6にはステアリングハンドル7が支持され、その後方には座席9が設けられている。
【0017】
図1に示すように、燃料タンク8をボンネット22内に収め、燃料タンク8本体の後側はハンドルポスト6内に収納状態となっている。
また、ステアリングハンドル7の下方には車体1の進行方向を前後方向に切り替える前後進レバー10が設けられている。この前後進レバー10を前側に移動させると車体1は前進し、後方へ移動させると後進する。またハンドルポスト6を挟んで前後進レバー10の反対側にはエンジン回転数を変更するスロットルレバー11が設けられ、またステップフロア13の右コーナー部にはアクセルペダル15と左右のブレーキペダル16,17が配置されている。前後進レバー10の前側には緊急停止スイッチ60を設ける。前記アクセルペダル15は、基本的には路上走行時に使用し、その踏み込み量に応じてエンジン回転数が上昇すると共に、アクセルペダル15の踏み込み量をアクセルペダルポテンショ76(図5)が検出し、このアクセルペダルポテンショ76の検出値に応じて静圧式無段変速装置(HST)34のトラニオン軸30(図5の制御ブロック図にのみ図示)の回動角度を変更させることができる。該トラニオン軸30の回動角度により斜板34d(図4)の傾斜角度を変化させてHSTの出力を無段状に変更させることができる。
【0018】
前記スロットルレバー11はエンジン回転数を変更するもので、作業走行時に使用する。スロットルレバー11は操作した位置で手を離してもその位置が保持される構成である。
また、操縦席9の左側に低速、中速、高速及び中立のいずれかの位置を選択できる副変速レバー21が配置され、その後方に前輪2と後輪3の間に装着しているミッド作業機(モーア等)のPTO軸の入り切りと変速を行うミッドPTO変速レバー23aと、機体後部に装着した作業機(モーア、ロータリ、除雪機等)のPTO軸の入り切りと変速を行うリヤPTO変速レバー23bが設けられている。また、車体1の後方には作業機(図示せず)を連結する前記リンク31が設けられている。
【0019】
エンジン5の回転動力はHST入力軸33からHST34に伝達される。また、HST入力軸33から導入された動力により図4に示す油圧ポンプ34aを作動させて、油圧ポンプ34aに設けられた斜板34dの傾斜角度に応じた圧油を油圧閉回路34cから油圧モータ34bに供給し、該油圧モータ34bにより走行出力軸35を駆動させて噛合式の変速装置38へ動力を伝達させる。
【0020】
図3に示すように、噛合式の変速装置38の副変速クラッチ39は、変速軸43の回転がデフ装置46を介して後輪3が副変速高速段の走行速度で駆動される。
前記HST34から出力された動力は、走行出力軸35から回転軸36に伝達される。変速装置38による変速段は次のように設定される。すなわち副変速高速(3速)は、ギヤ38aからギヤ38bで変速された動力が変速軸43へ伝達される。また、副変速中速(2速)は、ギヤ38cからギヤ38dで変速された動力が変速軸43へ伝達され、副変速低速(1速)は、ギヤ38eからギヤ38fで変速された動力が変速軸43へ伝達される。これら副変速の3段変速は、副変速レバー21を操作してシフタ39が左右にスライドすることで切り替わる。変速軸43の回転がデフ装置46を介して後輪3が副変速中速段の走行速度で駆動される。
【0021】
一方、HST入力軸33から容量可変式の油圧ポンプ34a(図4)に入力された動力はポンプ出力軸51(図3にのみ図示)からPTO油圧クラッチ54などを経由してPTO軸52に設けられたPTO用の駆動系に伝達される。PTO軸52にはリヤPTO軸55とミッドPTO軸56に動力伝達される。
また、変速軸43の副変速下手側のギヤ58からPTO軸52のギヤ47、このギヤ47と一体のギヤ59を経由して、前輪出力軸48のギヤ57に伝達され、前輪2が駆動される。
【0022】
さらに、車体1の前方又は後方にローダ80(図15参照)を取り付けたときはローダアーム81でローダ80を昇降させる。
また静油圧式無段変速装置(HST)34はトラニオン軸30(図4,図5)の回動角度、すなわち斜板34dの回動角度によりその回転数が決まり、詳細な説明は省略するが、アクセルペダル15の踏み込み量がアクセルペダルポテンンショ76で検出されると、アクセルペダルポテンンショ76の検出値に応じてトラニオン軸30の作動量がコントローラ100により自動的に設定され、静油圧式無段変速装置(HST)34の油圧出力回転数がコントローラ100により自動的に適切な値に設定される。
【0023】
なお、前後進切替レバー10の前進側又は後進側への切り替えで前後進切替レバー10の回動基部に設けている図示しない切替スイッチを作動させる等の方法で、制御装置100が静油圧式無段変速装置(HST)34のトラニオン軸30の回動方向を前進側又は後進側に設定する。このトラニオン軸30の回動方向は、切替弁63(図4)で決定する。そして、トラニオン軸30の回動角度が、アクセルペダル15の踏み込み量に応じて変化する。トラニオン軸30の回動角度は、比例弁65への電流量で決定する。
【0024】
さらに、バルブスティック時などの緊急時には、操縦部にあるブレーキペダル16,17を目一杯踏み込むと強制的にHSTトラニオン軸30をニュートラルに戻すことができる。ブレーキ16,17を踏むということは、アクセルペダル15から足を離しているので、トラニオン軸30は中立に戻る。このときトラニオン軸30が自然に戻るまたは強制的に高速で戻すかは、機種により異なる。
【0025】
図4に示す電子サーボHST34の油圧回路34cにおいて、不純物でバルブなどが詰まる(バルブスティック)際には、操縦部にある緊急停止レバー62(図5のみに図示)を引いて、HST34のトラニオン軸30をニュートラルに戻す。
【0026】
従来は、緊急時にHSTトラニオン軸30をニュートラルに戻す構成は知られているが、バルブスティック時にはスプール位置が固定されて走行速度が固定されてしまう。そこで緊急時には手動で緊急停止レバー62を引いてトラクタを停止させる。
【0027】
上記した2種類の手動操作部材(緊急停止レバー62とブレーキペダル16,17)で緊急時にトラクタを停止することができる。
また、緊急停止スイッチ60(図5にのみ図示)を押すと、エンジンが停止して、衝突等の事故を避ける場合に利用される。
【0028】
図2に示すトラクタの全体平面図に示すように、ハンドル7の回りのハンドルポスト6にはスロットルレバー11と前後進レバー10が左右に配置されている。スロットルレバー11の右側のステップフロア13上にはアクセルペダル15が配置されている。アクセルペダル15はHST34のトラニオン軸30の回転角度とエンジン回転数の調整を行うことができる。
【0029】
さらに操縦席9の右側のレバーガイド12aには最高速設定ダイヤル14a、車速緩慢度応答ダイヤル14b及びクルーズ走行スイッチ14cが前側から後側に順に一列に配置され、該ダイヤル14a,14bとスイッチ14cの外側には作業機上げ下げ用のポジション用レバー18が配置されている。なお、前記ダイヤル14a,14bとスイッチ14cは前後方向に一列に順に配置されていれば良く、ダイヤル14a,14bとスイッチ14cの配列順序にはこだわらない。また、ダイヤル、スイッチ14a,14b,14cの外側には作業機上げ下げ用のポジション用レバー18を配置したので、これらのダイヤル、スイッチ14a,14b,14cを設けない場合に比較して操縦性が良くなる。
【0030】
最高速設定ダイヤル14aはダイヤル式であり、トラニオン軸30の回動角度を調整して車体の最高速度を規制するものである。したがって、アクセルペダル15を最大まで踏み込んでも、最高速設定ダイヤル14aで規制している速度までしか出せない構成としている。
【0031】
車速緩慢度応答ダイヤル14bもトラニオン軸30の回動速度を変更設定するものである。アクセルペダル15を踏むと、アクセルペダルポテンショ76で目標となる速度、すなわち目標となるトラニオン軸30の回動角度が決まるが、この目標となるトラニオン軸30の回動角度の位置までに、トラニオン軸30が到達する時間を変更するものである。例えば、車速緩慢度応答ダイヤル14bを鈍感(スロー)にしておくと、アクセルペダル15を素早く踏んでも、トラニオン軸30の目標となる回動角度への到達時間がゆっくりとなるので、ゆっくりと加速していく構成である。この目標位置への到達時間の変更は、比例弁65(図4)への電流のデューティー比を変更することで行う。
【0032】
クルーズ走行スイッチ14cは入り切り式のスイッチであり、ある特定の速度で走行しているときにこのクルーズ走行スイッチ14cを入りにすると、アクセルペダル15から足を離してもそのときの速度を維持する構成である。
【0033】
また操縦席9の左側には副変速レバー21、ミッドPTOレバー23a、リヤPTOレバー23b及び4WDレバー24が配置されている。4WDレバー24の外側には副変速レバー21が配置され、リヤPTOレバー23bの外側にはミッドPTOレバー23aが配置されている。
【0034】
図6に拡大平面図で示すように、最高速設定ダイヤル14aは、トラニオン軸30の回転角度を、HST34の出力を最高速相当に変更するものであり、所定の最高速を操縦者が決めることができるように、例えば約15〜30km/hの範囲にダイヤル式に変更できる構成としている。車速緩慢度応答ダイヤル14bは、アクセルペダル15の踏みに応じたトラニオン軸30の目標回動角度の位置までに、トラニオン軸30が到達する時間を変更するものである。この車速緩慢度応答ダイヤル14bによる所定の車速に達するまでの時間は、例えば約3秒間から約6秒間までとダイヤル式に変更できる構成としている。
【0035】
また、クルーズ走行スイッチ14cは該クルーズ走行スイッチ14cを入れたときの車速に合致するように、トラニオン軸30の回転角度を一定とし、従ってHST34の出力が一定に保持されて車速が一定に保持される。クルーズ走行スイッチ14cを入れた後でアクセルペダル15から足を離してもそのときの速度を維持する。
【0036】
このように最高速設定ダイヤル14a、車速緩慢度応答ダイヤル14b及びクルーズ走行スイッチ14cのいずれかを入りとするだけで、HST34のトラニオン軸30の回転角度を予め設定された3種類のいずれかに設定できるので、これらのダイヤル14a,14bとスイッチ14cを設けない場合に比較して操縦性が良くなる。しかもダイヤル14a,14bとスイッチ14cは操縦席9の隣接位置に前後方向に一列に並べて配置されるので、これらのダイヤル14a,14bとスイッチ14cの選択に迷うことがなく、目的のダイヤル、スイッチを素早く入れることができる。
【0037】
また、これらのダイヤル14a,14bとスイッチ14cの外側には作業機昇降用のポジション用レバー18が配置することで、これらのダイヤル、スイッチ14a,14b,14cを作業機昇降用のポジション用レバー18の直近に設けない場合に比較して操縦性が良くなる。
【0038】
これら3つのダイヤル、スイッチ14a,14b,14cはまとめてサーボスイッチとも呼ばれているが、操縦席9に隣接する右のレバーガイド12aに前後方向に一列に並べる順序としては前側から後側に最高速設定ダイヤル14a、クルーズ走行スイッチ14c及び車速緩慢度応答ダイヤル14bの順に配置してもよい。
【0039】
図7に操縦席付近の概略側面図を示すように、これらダイヤル14a,14bとスイッチ14cは操縦者の体格に合わせて右のレバーガイド12aに設けた長穴に挿入し、操縦席9の前後方向に移動可能にすることで、操縦者が操作し易い設置位置を調整できる。
【0040】
エンジン5に負荷が掛かるトラニオン軸30の回転角度を小さくして車速を落とすことができる制御を実行するエンスト防止用のエンジンストールガードスイッチ75(図2)を操縦席9の左のレバーガイド12bに設けているので、そのスイッチ75の操作性がよい。なお、四輪駆動レバー24は、入りか切り用のレバーであり、レバーストロークの中間位置にレバー24は停止しないので、エンスト防止用のエンジンストールガードスイッチ75の操作の邪魔にはならない。また、前記3つのダイヤル14a,14bとスイッチ14cとは性質の異なるエンスト防止用のエンジンストールガードスイッチ75をダイヤル14a,14bとスイッチ14cから離して設けることで、互いに誤操作を防止できる。
【0041】
図8の作業車両の一部平面図に示すように、エンスト防止用のエンジンストールガードスイッチ75を操縦席9のハンドル7に前方の壁面にある操作パネル77のエンジンメータ表示部の近くに配置しても良い。この場合は運転者の視界に入りやすいので、計器類とともに常時スイッチ75の位置を把握できて操作性がよい。
【0042】
図9の操縦部の部分斜視図に最高速設定ダイヤル14aの代わりに最高速レバー78を設け、該最高速レバー78のグリップ78aにダイヤル式の車速緩慢度応答ダイヤル14bを設けても良い。この場合は最高速を変更しながら目標速度への到達時間を容易に変更可能となる。
【0043】
図10のハンドル部分の平面図に示すように、最高速設定ダイヤル14aの代わりに最高速レバー14xをハンドルポスト7aに基部を操作可能に設け、最高速レバー14xのグリップ部の頂部にダイヤル式の車速緩慢度応答ダイヤル14bを設けても良い。この場合は操縦性が良くなる効果がある。
【0044】
図11のハンドル部分の平面図に示すように、ハンドル7のサークルの内側に切替スイッチ式の車速緩慢度応答手段14bを設けても良い。この場合も操縦性が良くなる効果がある。
【0045】
図12に操舵室の一部平面図を示すように、作業車両の操縦席9を中心として、その左側のレバーガイド12bの最前部に最高速設定ダイヤル14aと車速緩慢度応答ダイヤル14bを配置し、それらダイヤル14a,14bの後ろにクルーズ走行スイッチ14cを配置する構成を採用しても良い。
さらにこれらのダイヤル14a,14bとスイッチ14cの後ろに副変速レバー21、ミッドPTOレバー23aとリヤPTOレバー23b等を配置する構成としても良い。
【0046】
このようなレイアウトにするとダイヤル14a,14bとスイッチ14cに手が届くのでトラクタの緊急停止時に対応できる。また、クルーズ走行スイッチ14cが入りになると操縦席9の前方にある操作パネル77に設けられたクルーズモニタランプ77aが点灯するようにしておけば、操縦者はクルーズコントロール中であることが目視できる。
またクルーズモニタランプ77aとクルーズ走行スイッチ14cの握り部分を点灯可能な構成にしておき、クルーズ走行スイッチ14cが入りになると、該クルーズ走行スイッチ14cそのものが点灯する構成にしてもよい。
【0047】
図13に操舵室の一部平面図を示すように、作業車両の操縦席9を中心として、その左側のレバーガイド12bの最前部にクルーズ走行スイッチ14cを配置し、その後ろに最高速設定ダイヤル14aと車速緩慢度応答ダイヤル14bを配置してもよい。
なお、これらのダイヤル14a,14bとスイッチ14cの後ろに主変速レバー20や副変速レバー21、ミッドPTOレバー23aとリヤPTOレバー23b等を配置する構成としても良い。このようなレイアウトにすると、速度の変更と前記ダイヤル14a,14bとスイッチ14cの相互の操作性が従来より向上する。
【0048】
図14に操舵室の一部平面図を示すように、作業車両の操縦席9の右側の肘掛けアームにクルーズ走行スイッチ14cを先頭として、その後ろに最高速設定ダイヤル14aと車速緩慢度応答ダイヤル14bを並列配置しても良い。
このような構成により、右利きの操縦者が右腕をあまり動かすことなく、これらのダイヤル14a,14bとスイッチ14cを容易に操作できる。
【0049】
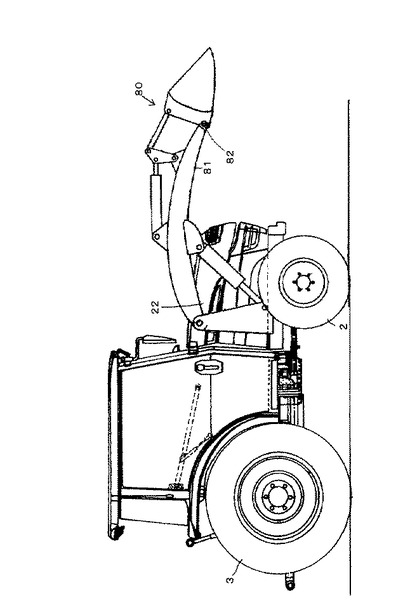
図15の全体側面図に示すように、トラクタの前方にローダ80を、ローダアーム81を介して昇降自在に装着している場合に、ローダ80に大きな荷物が載っていてローダ80に大きな負荷が掛かっていることを検出しようとすると、高価な負荷検出センサ82を取り付ける必要がある。そのような場合に対処するために、次のような方法を用いることでローダ80の作業が容易に行える。
【0050】
すなわち、トラニオン軸30の回動角度を検知できるトラニオン軸(回動)角度センサ30aと変速装置の出力軸43の回転速度センサ(車速センサ)53を設けていると、出力軸43の回転速度センサ53で検出される車両走行速度が低下する場合に、トラニオン軸(回動)角度センサ30aの検出値も設定値より低下することがある。このような事態は、ローダ80に大きな荷物や土砂が載り、ローダ80に負荷が掛かり過ぎていると判断できるので、ローダアーム81を上げるようにトランスミッションの油圧回路の油圧ポンプ66(図4)のパワーアップをすることができる。
また前記したようにローダアーム81を上昇させた後でトラクタを後退させる場合には後進時の最高設定速度まで加速を緩やかに行うように変速装置の走行制御を行うことで、燃費の改善が図れる。
また、大きな荷物や土砂をローダ80から放出する時には、バックをするので、このバックの判定があると、エンジン回転数を最大限上げてトラクタの走行速度を速くすることで、作業が速やかに進行する。
【0051】
図3にHSTチャージ用トロコイドポンプ87を示す。HST34の取付プレート85をフロントケース83とミッドケース84の間に挟み込み固定している。そして、HST34から出ているPTO軸52を駆動するポンプ出力軸51(図3)の直後から前記HSTチャージ用トロコイドポンプ87を駆動する構成としている。これにより、高効率でHSTチャージ用トロコイドポンプ87が駆動されてHST34内に油圧がチャージされるようになる。
また、前記取付プレート85により、ミッドケース84内のオイルがフロントケース83内に入ってくるのを防止でき、HST34が油漬けになるのを防いでいる。
【符号の説明】
【0052】
1 走行車体 2 前輪
3 後輪 5 エンジン
6 ハンドルポスト 7 ステアリングハンドル
8 燃料タンク 9 操縦席(座席)
10 前後進レバー 11 スロットルレバー
12a,12b レバーガイド 13 ステップフロア
14a 最高速設定ダイヤル 14b 車速緩慢度応答ダイヤル
14c クルーズ走行スイッチ 14x 最高速レバー
15 アクセルペダル 16,17 ブレーキペダル
18 作業機上げ下げ用のポジション用レバー
20 主変速レバー 21 副変速レバー
22 ボンネット 23a ミッドPTO変速レバー
23b リヤPTO変速レバー
24 四輪駆動レバー(4WDレバー)
30 トラニオン軸 30a トラニオン軸角度センサ
31 リンク 33 HST入力軸
34 静油圧式無段変速装置(HST)
34a 油圧ポンプ 34b 油圧モータ
34c 油圧閉回路 34d 斜板
35 走行出力軸 36 回転軸
37 伝動軸 38 噛合式変速装置
38a〜38f 副変速ギヤ 39 副変速クラッチ
41 ギヤ 42 高速段ギヤ
43 変速軸 45 ギヤ
46 デフ装置 47 ギヤ
48 前輪出力軸(4WD軸) 49 デフ装置
51 ポンプ出力軸 52 PTO軸
53 回転速度センサ(車速センサ) 54 PTO油圧クラッチ
55 リヤPTO軸 56 ミッドPTO軸
57〜59 ギヤ 60 緊急停止スイッチ
62 緊急停止レバー 63 切替弁
65 比例弁 66 油圧ポンプ
75 エンジンストールガードスイッチ
76 アクセルペダルポテンショ 77 操作パネル
77a クルーズモニタランプ 78 最高速レバー
78a グリップ 80 ローダ
81 ローダアーム 82 負荷検出センサ
83 フロントケース 84 ミッドケース
85 取付プレート
87 HSTチャージ用トロコイドポンプ
100 コントローラ
【特許請求の範囲】
【請求項1】
車輪(2,3)とエンジン(5)を備えた車体(1)と、エンジン(5)の出力を調整するスロットルレバー(11)と、エンジン(5)からの出力に応じて油圧出力を変える油圧式無段変速装置(34)と、該油圧式無段変速装置(34)のトラニオン軸(30)の回動方向と角度を前進方向と後進方向に切り替える前後進レバー(10)と、前記油圧式無段変速装置(34)のトラニオン軸(30)の前進方向又は後進方向回動角度を調整して前進方向又は後進方向の油圧出力を踏み込み量に応じて調整するアクセルペダル(15)と、車体(1)の前方又は後方に昇降自在に装着した作業機(80)と、
操縦者が着席する操縦席(9)を備えた走行車両において、
トラニオン軸(30)の回動角度を調整して最高速を設定する最高速設定ダイヤル(14a)と車速緩慢度応答速度を規制する車速緩慢度応答ダイヤル(14b)とクルーズ走行速度を設定するクルーズ走行スイッチ(14c)を操縦席(9)の隣接位置であって車体(1)の前後方向に一列に配置し、該最高速設定ダイヤル(14a)と車速緩慢度応答ダイヤル(14b)とクルーズ走行スイッチ(14c)の外側には作業機上げ下げ用のポジション用レバー(18)を配置したことを特徴とする走行車両。
【請求項2】
最高速設定ダイヤル(14a)、車速緩慢度応答ダイヤル(14b)及びクルーズ走行スイッチ(14c)を車体(1)の前側から後側に順に一列に配置したことを特徴とする請求項1記載の作業車両。
【請求項3】
エンジンストールガード用のスイッチ(75)を前記3つの最高速設定ダイヤル(14a)、車速緩慢度応答ダイヤル(14b)及びクルーズ走行スイッチ(14c)を配置した操縦席(9)の側部とは反対側の側部に配置したことを特徴とする請求項1記載の作業車両。
【請求項4】
前記2つのダイヤル(14a,14b)と1つのスイッチ(14c)を操縦席(9)に着席する操縦者の体格に合わせられるように操縦席(9)を前後方向に移動可能に配置したことを特徴とする請求項1記載の作業車両。
【請求項1】
車輪(2,3)とエンジン(5)を備えた車体(1)と、エンジン(5)の出力を調整するスロットルレバー(11)と、エンジン(5)からの出力に応じて油圧出力を変える油圧式無段変速装置(34)と、該油圧式無段変速装置(34)のトラニオン軸(30)の回動方向と角度を前進方向と後進方向に切り替える前後進レバー(10)と、前記油圧式無段変速装置(34)のトラニオン軸(30)の前進方向又は後進方向回動角度を調整して前進方向又は後進方向の油圧出力を踏み込み量に応じて調整するアクセルペダル(15)と、車体(1)の前方又は後方に昇降自在に装着した作業機(80)と、
操縦者が着席する操縦席(9)を備えた走行車両において、
トラニオン軸(30)の回動角度を調整して最高速を設定する最高速設定ダイヤル(14a)と車速緩慢度応答速度を規制する車速緩慢度応答ダイヤル(14b)とクルーズ走行速度を設定するクルーズ走行スイッチ(14c)を操縦席(9)の隣接位置であって車体(1)の前後方向に一列に配置し、該最高速設定ダイヤル(14a)と車速緩慢度応答ダイヤル(14b)とクルーズ走行スイッチ(14c)の外側には作業機上げ下げ用のポジション用レバー(18)を配置したことを特徴とする走行車両。
【請求項2】
最高速設定ダイヤル(14a)、車速緩慢度応答ダイヤル(14b)及びクルーズ走行スイッチ(14c)を車体(1)の前側から後側に順に一列に配置したことを特徴とする請求項1記載の作業車両。
【請求項3】
エンジンストールガード用のスイッチ(75)を前記3つの最高速設定ダイヤル(14a)、車速緩慢度応答ダイヤル(14b)及びクルーズ走行スイッチ(14c)を配置した操縦席(9)の側部とは反対側の側部に配置したことを特徴とする請求項1記載の作業車両。
【請求項4】
前記2つのダイヤル(14a,14b)と1つのスイッチ(14c)を操縦席(9)に着席する操縦者の体格に合わせられるように操縦席(9)を前後方向に移動可能に配置したことを特徴とする請求項1記載の作業車両。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】

【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【公開番号】特開2013−112233(P2013−112233A)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2011−261196(P2011−261196)
【出願日】平成23年11月30日(2011.11.30)
【出願人】(000000125)井関農機株式会社 (3,813)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成23年11月30日(2011.11.30)
【出願人】(000000125)井関農機株式会社 (3,813)
[ Back to top ]