
作業車輌のDPF再生制御装置及びこの作業車輌のDPF再生制御装置を備えるコンバイン
【課題】本発明は、作業車輌において、作業対象領域における作業を終了するまでに自動再生処理が始まるかを作業者に報知することで、作業者が作業計画を立て易くすることを課題とする。
【解決手段】作業部(6)を駆動しながら走行している状態において、作業が終了するまでに要する所要移動距離を算出し、又は、作業が終了するまでに要する所要時間を算出し、PM堆積量推定手段により推定される粒子状物質の堆積量の移動平均から、DPF(10)における粒子状物質の堆積量が予め設定された設定堆積量に到達するまでの再生猶予時間又は再生猶予距離を算出し、再生猶予時間が前記所要時間よりも大きいか、又は、前記再生猶予距離が所要移動距離よりも大きい場合に、当該作業中にDPF(10)の自動再生処理が行われることを報知する。
【解決手段】作業部(6)を駆動しながら走行している状態において、作業が終了するまでに要する所要移動距離を算出し、又は、作業が終了するまでに要する所要時間を算出し、PM堆積量推定手段により推定される粒子状物質の堆積量の移動平均から、DPF(10)における粒子状物質の堆積量が予め設定された設定堆積量に到達するまでの再生猶予時間又は再生猶予距離を算出し、再生猶予時間が前記所要時間よりも大きいか、又は、前記再生猶予距離が所要移動距離よりも大きい場合に、当該作業中にDPF(10)の自動再生処理が行われることを報知する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、作業車輌のDPF再生制御装置及びこの作業車輌のDPF再生制御装置を備えるコンバインに関する。
【背景技術】
【0002】
コンバイン等の作業車輌は、ディーゼルエンジンが用いられ、その排気ガス浄化装置として、窒素酸化物を昇温させて吸着除去するDOC(Diesel Oxidation Catalyst)と、窒素酸化物に尿素を触媒として加水分解されたアンモニアを窒素酸化物に反応させて窒素酸化物を無害な窒素に変えるSCR(Selective Catalytic Reduction)とにより構成した技術が特許文献1に記載されている。
【0003】
また、排気ガス通路に配置した酸化触媒コンバータ(以下、「DOC」という)の酸化触媒の作用により排気ガス中のNOからNO2を生成し、このNO2を酸化材としてディーゼルパティキュレートフィルタ(以下、「DPF」という)で捕集した排気ガス中の黒煙などの粒子状物質(Particulate Matter、以下、「PM」という)を焼却除去する技術が特許文献2に記載されている。
【0004】
さらに、特許文献3には、DPFで捕集したPMを焼却除去する再生処理は高温になるために、安全な再生処理場所まで移動する余裕を持って、移動タイミングの到来を報知する報知装置を設けた作業機械が記載されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2011−24510号公報
【特許文献2】特許2006−97652号公報
【特許文献3】特許2011−7105号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
DPFにPMが蓄積され続けると排圧上昇等のトラブルが生じるため、蓄積されたPMを適宜焼却除去してDPFを再生する必要があり、PMの堆積量が許容量を超えた状態でPMを燃焼すると、DPFが溶損したり焼損したりする可能性があるために、許容量を超える前にDPFの焼却除去を行うことが必要である。そして、DPFの再生処理には、走行しながらDPFを高温にしてPMの焼却を行う自動PDF再生処理と走行を完全に停止してエンジンの燃料噴射を調整してPMの焼却を行う手動PDF再生処理がある。
【0007】
上記特許文献3に記載の技術では、GPS(Global Positioninng System)を利用した位置測定装置の移動データで作業位置から再生処理場所までの実測所要時間又は実測距離を利用して安全な再生処理場所でのDPFの再生処理に間に合うように戻り時期を予測して知らせるものであるが、この技術では、作業が完了するまでにDPFの再生処理が実行されるかどうかを判定することはできない。
【0008】
本発明は、作業車輌の作業対象領域の面積を自動的に認識して、その作業対象領域における作業を終了するまでに自動再生処理が始まるかを作業者に報知することで、作業者が作業計画を立て易くするし、収穫作業を能率的に行うことができる作業車輌を提供することを課題とする。
【課題を解決するための手段】
【0009】
上記本発明の課題は、次の技術手段により解決される。
請求項1に記載の発明は、エンジン(7)からの排気ガス中に含まれる粒子状物質を捕集するDPF(10)と、該DPF(10)内の温度を上昇させて粒子状物質を除去する自動再生処理を行う昇温手段と、DPF(10)における粒子状物質の堆積量を推定するPM堆積量推定手段と、機体の移動距離を算出する移動距離算出手段と、事前に設定された作業対象領域の面積と移動距離算出手段により算出される機体の移動距離と作業部(6)の作業幅とから前記作業対象領域中に残された未作業面積を自動的に算出する未作業面積算出手段とを備え、作業部(6)を駆動しながら走行している状態において、前記未作業面積算出手段により算出された未作業面積(Am)と作業部(6)の作業幅から作業が終了するまでに要する所要移動距離を算出し、又は、前記未作業面積算出手段により算出された未作業面積(Am)と機体の走行速度と作業部(6)の作業幅から作業が終了するまでに要する所要時間を算出し、前記PM堆積量推定手段により推定される粒子状物質の堆積量の移動平均から、DPF(10)における粒子状物質の堆積量が予め設定された設定堆積量に到達するまでの再生猶予時間又は再生猶予距離を算出し、該再生猶予時間が前記所要時間よりも大きいか、又は、前記再生猶予距離が所要移動距離よりも大きい場合に、当該作業中にDPF(10)の自動再生処理が行われることを報知するDPF再生報知手段を設けた作業車輌のDPF再生制御装置とする。
【0010】
請求項2に記載の発明は、前記未作業面積算出手段は、前記作業部(6)を駆動した状態での移動経路によって閉領域が形成された場合に、作業部(6)の作業幅と作業車輌の移動経路とから閉領域内の未作業面積(Am)を算出する構成とした請求項1に記載の作業車輌のDPF再生制御装置とする。
【0011】
請求項3に記載の発明は、前記DPF再生報知手段によって再生猶予時間又は再生猶予距離を通知する請求項1又は請求項2に記載の作業車輌のDPF再生制御装置とする。
請求項4に記載の発明は、前記昇温手段によってDPF(10)の自動再生処理が実行された状態においてPM堆積量推定手段により検出される粒子状物質の堆積量が増加する場合に、前記設定堆積量よりも大きい手動再生堆積量に到達するまでの手動再生猶予時間又は手動再生猶予距離をDPF再生報知手段で報知する請求項1又は請求項2又は請求項3に記載の作業車輌のDPF再生制御装置とする。
【0012】
請求項5に記載の発明は、前記作業部(6)としての刈取装置と、請求項1から請求項4のいずれか一項に記載の作業車輌のDPF再生制御装置を備えるコンバインとする。
【発明の効果】
【0013】
請求項1記載の発明によれば、コンバイン等の作業車輌を操縦して作業を行う作業者は、作業終了よりも早い段階でDPF10の自動再生処理が行われて作業能率が低下することを知ることができ、自動再生処理が行われる場合は、それに応じて作業計画を変更することができるので、収穫作業を能率的に行うことができる。
【0014】
請求項2記載の発明によれば、請求項1記載の発明による効果に加えて、機体の移動軌跡から自動的に未作業面積(Am)を算出して自動的にDPF再生報知手段で作業終了までにDPF(10)の再生処理が行われて出力低下が生じるかを作業者に報知することができる。
【0015】
請求項3記載の発明によれば、請求項1又は請求項2記載の発明による効果に加えて、再生処理が始まって作業能率が低下するまでの余裕を知って、詳細な作業計画を立てることができ、収穫作業を更に能率的に行うことができる。
【0016】
請求項4記載の発明によれば、請求項1又は請求項2又は請求項3に記載の発明による効果に加えて、再生条件が良好でなく、DPF(10)の自動再生処理ではPMの焼却が充分でない場合に、走行を停止して行う手動再生処理までの手動再生猶予時間または手動再生猶予距離を作業者が把握し、手動再生を行う場所まで安全に移動できる。
【0017】
請求項5記載の発明によれば、コンバインの収穫作業を能率的に行うことができる。
【図面の簡単な説明】
【0018】
【図1】コンバインの側面図である。
【図2】排気管の拡大平面図である。
【図3】コンバインのエンジン搭載状態を示す側面図である。
【図4】コンバインのエンジン搭載状態を示す平面図である。
【図5】自動制御のブロック図である。
【図6】自動PDF再生の報知制御フローチャート図である。
【図7】自動PDF再生の報知制御フローチャート図である。
【図8】コンバインの一部拡大正断面図である。
【図9】本機モニタの正面図である。
【図10】フロントパネルの正面図である。
【図11】コンバインの作業形態を示す説明図である。
【発明を実施するための形態】
【0019】
以下、本発明の実施形態を図面に示す実施例を参照しながら説明する。なお、左右とはコンバイン側から前方に向かって左と右をいうものとする。
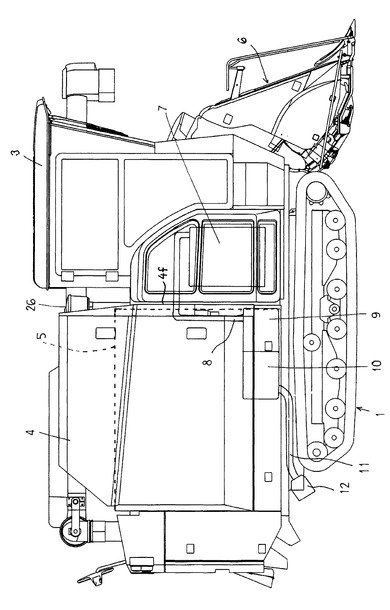
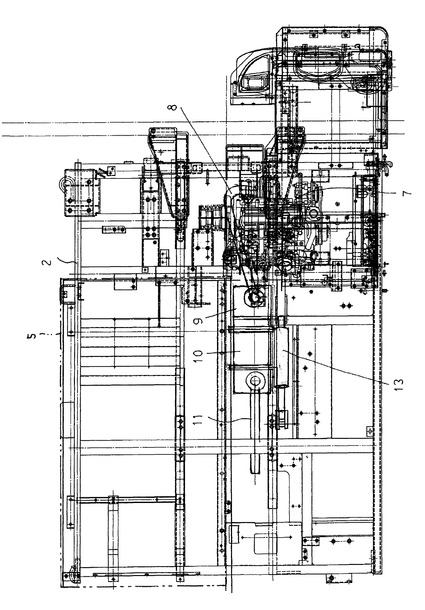
図1はコンバインの側面図を示し、クローラ走行装置1を装備した走行車台2の前部右側にキャビン3を搭載し、このキャビン3の後部にグレンタンク4を搭載し、該グレンタンク4の左側に脱穀装置5を搭載している。走行車台2の前側には刈取装置(作業部)6を昇降可能に装着し、この刈取装置6で刈り取った穀稈をキャビン3の左側に設ける穀稈搬送装置で脱穀装置5に搬送する。
【0020】
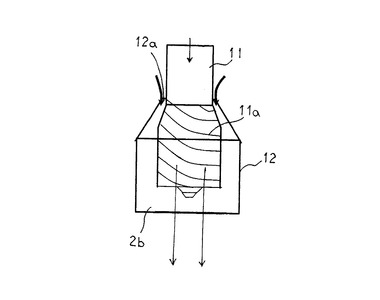
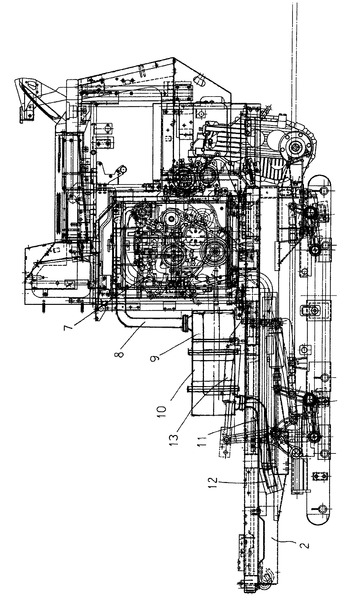
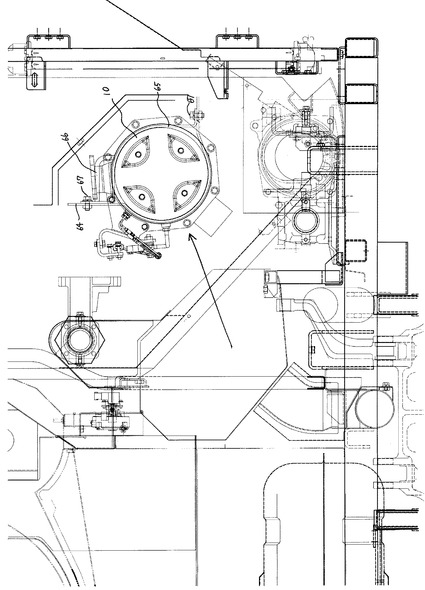
エンジン7は、キャビン3の下部で走行車台2に搭載し、その前部排気管8をDOC9の上部に繋ぎ、DOC9からDPF10を通してDPF10の後下部から後方の地面に向けて後部排気管11から排気ガスを排出する。後部排気管11の後部には排気管冷却装置12を装着している。この排気管冷却装置12は、後部排気管11の外周に設ける吸気口12aから後部排気管11を囲んで排気口12b側に空気を誘導し、後部排気管11の外周に螺旋状に形成した誘導フィン11aで空気を後部排気管11の周囲で旋回させながら後方へ送って後部排気管11から地面に吹き出す排気ガスを冷却する。
【0021】
DOC9とDPF10の配置位置は、左側の脱穀装置5と右側のグレンタンク4の間で、かつピッチング油圧シリンダ13の左側で、走行車台2の左右及び前後の中央に位置して、キャビン3内の操縦席から離れている。このようなDPF10の位置は、脱穀装置5のトウミが吸い込む空気を暖めて収穫する穀粒を乾燥する効果がある。
【0022】
図8は、DPF10の取付構造を示し、受バンド64にDPF10を載せて前後二か所の締め付けバンド65を受バンド64にボルト67に締め付けて取り付けている。締め付けバンド65には取手66を設けて、締め付けバンド65及びDPF10の取り外しが容易に出来るようにしている。なお、締め付けバンド65をDPF10に固着すると、さらに取り外しが容易になる。
【0023】
なお、ピッチング油圧シリンダ13は、クローラ走行装置1の左右高さを調整する油圧シリンダである。
DPF10は、フィルターで捕集した排気ガス中の黒煙などの粒子状物質(PM)が所定量以上になるとポスト噴射によって燃焼させる再生処理を自動的に行うが、走行速度が一定速度以下であると、一定箇所に高温の排気ガスが排出されて排藁に着火する危険性がある。
【0024】
そして、DPF10の再生処理には、作業走行しながらDPF10を高温にしてPMの焼却を行う自動PDF再生処理と、安全な場所で走行を完全に停止してエンジンの燃料噴射を調整してPMの焼却を行う手動PDF再生処理がある。
【0025】
上記の自動PDF再生処理は、エンジン7の出力低下を招き、収穫作業の効率が低下して作業時間が長引くので、収穫作業中に再生処理が行われるかどうかを作業者に報知するために、次の制御を行っている。
【0026】
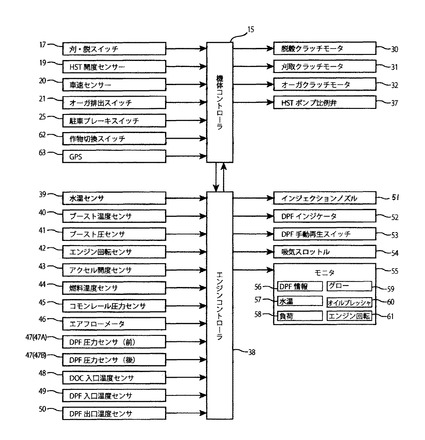
図5に自動制御のブロック図を示している。
本機コントローラ15に入力するデータ信号は、スピン旋回スイッチ16のオン・オフ信号と、刈取・脱穀スイッチ17のオン・オフ信号と、HST開度センサ19の開口信号と、移動速度検出手段としての車速センサ20による機体の走行速度と、オーガ排出スイッチ21のオン・オフ信号と、駐車ブレーキスイッチ25のオン・オフ信号と、麦・米切換スイッチ62のオン・オフ信号と、GPSデータ63としてGPSからの信号で検出する機体の現在位置データである。
【0027】
本機コントローラ15から出力する制御信号は、脱穀クラッチモータ30へのオン・オフ出力信号と、刈取クラッチモータ31へのオン・オフ出力信号と、オーガクラッチモータ32へのオン・オフ出力信号と、HSTポンプ比例弁37である。
【0028】
エンジンコントローラ38に入力するデータ信号は、水温センサ39のラジエータ水温と、ブースト温度センサ40の排気温度と、ブースト圧センサ41の排気圧と、エンジン回転センサ42のエンジン出力軸の回転数と、アクセル開度センサ43のアクセル開度と、燃料温度センサ44の燃料温度と、コモンレール圧力センサ45のコモンレール圧と、エアフローメータ46の吸気量とDPF差圧センサ47のDPFの吸排気圧力差(DPF前側圧力センサ47AとDPF後側圧力センサ47Bの圧力差)と、DOC入口温度センサ48のDOC入口温度と、DPF入口温度センサ49のDPF入口温度と、DPF出口温度センサ50のDPF出口温度である。
【0029】
エンジンコントローラ38から出力するする制御信号は、インジェクションノズル51への噴射信号と、DPFインジケータ52へのDPFの詰まり情報と、DPF手動再生スイッチ53へのオン信号と、吸気スロットル54の吸気絞り信号で、本機モニタ55にDPF情報56と、水温57と、負荷58と、グロー温度59と、オイルプレシャー60と、エンジン回転数61が送られて表示する。
【0030】
PM堆積量推測手段は、エンジンコントローラ38が取得するDPF差圧センサ47のDPFの吸排気圧力差からPMの堆積量を推測し、走行開始のPM堆積量と走行距離から読み取るPM堆積推移グラフのデータで、現在のPMの堆積量を推測する。
【0031】
移動距離算出手段は、前記車速センサ20から入力されるパルス信号と駆動輪の単位回転量あたりの移動距離を元に移動距離を算出する。この移動距離は、GPSによる位置情報から算出するようにしてもよい。
【0032】
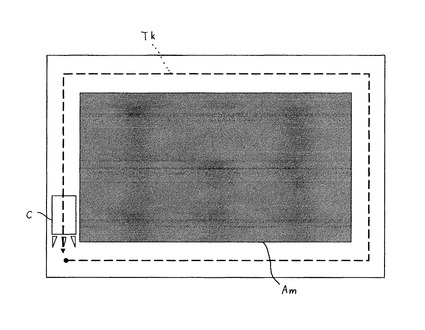
また、未刈面積検出手段(未作業面積算出手段)は、図11に示すとおり、本機コントローラ15が取得するGPSからの地図データで、コンバインCの移動軌跡Tkがが圃場の周囲を回刈りして閉ループを描くとその閉ループを作業圃場として認識し、閉ループ内の領域から刈取装置6の作業幅におけるGPSの通信装置の位置よりも未刈側に張出した分の面積を減じて未刈面積(未作業面積)Amを積分により算出する。すなわち、事前に作業圃場の形状や面積が入力されていなくても回刈り作業により移動軌跡Tkが閉ループを描くと未刈領域を算出できる。
【0033】
また、未刈面積算出手段は、予め入力された作業圃場の面積と走行距離算出手段により算出される機体の移動距離と、作業部6の作業幅とから未刈面積Amを算出するようにしてもよい。
【0034】
さらに、コンバインの作業開始は刈取・脱穀スイッチ17を入れることで検出する。
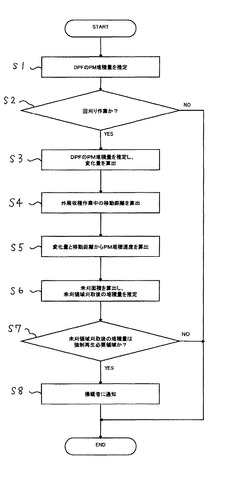
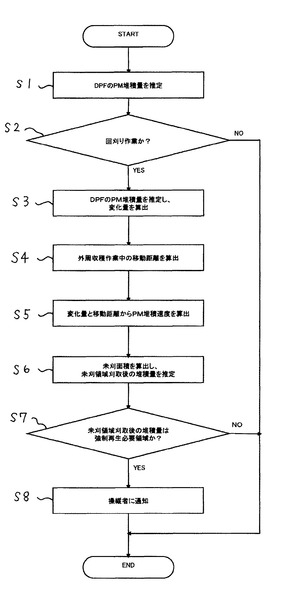
図6は、一つの圃場を収穫作業するに、収穫作業中に自動PDF再生(DPF10の温度を上昇させてPMを焼却する制御で、エンジン出力が低下して作業能率が低下する。)があるかどうかを作業者に知らせる自動DPF再生通知制御である。この自動DPF再生通知制御は作業見通しを立てるのに利用することができる。
【0035】
前記のPM堆積量推測手段でDPF10のPM堆積状況を推定し、回刈り等、コンバインの移動軌跡によって閉領域が形成された場合に未刈面積Am検出手段によって未刈地の面積を算出する。そして、この閉領域が形成された段階でのDPF10のPM堆積量を推定し、外周移動中の移動距離算出手段によって移動距離を算出し、前記作業面積算出手段により算出された未刈面積Amと移動距離算出手段により算出された移動距離と刈取装置6の作業幅とから、作業圃場の収穫が終了するまでに要する作業所要時間(所要移動時間)又は作業所要距離(所要移動距離)を算出し、前記未刈面積Amと前記移動距離と外周移動中のPM堆積量の変化量から粒子状物質の堆積量が予め設定された設定堆積量に到達するまでの再生猶予時間又は再生猶予距離を算出し、再生猶予時間が前記作業所要時間より大きい場合か、又は、再生猶予距離が作業所要距離より大きい場合は、DPF再生報知手段としての本機モニタ55のDPF情報56に何分後の作業中に自動PDF再生が始まることを表示して作業者に通知する。なお、未刈面積Amは、作業者が手動で入力するようにしても良い。
【0036】
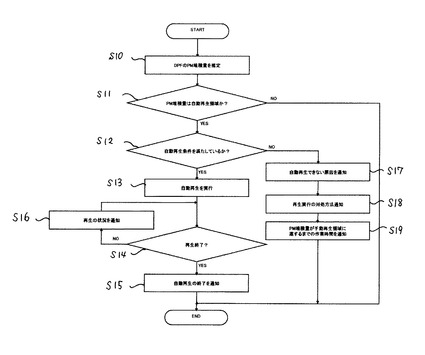
図7は、作業中の自動DPF再生が出来ない場合の制御で、前記のPM堆積量推測手段で自動DPF再生が行われるかを判断し、現在の作業状態で自動DPF再生を行える条件(外気温が低すぎなくてDPF10の温度上昇が可能)であるかを判断し、条件を満たせば自動DPF再生を実行して、再生途中では再生状況を本機モニタ55のDPF情報56に表示しながら再生が終了すると自動再生の終了をDPF情報56に表示する。
【0037】
また、外気温が低すぎて自動DPF再生が出来なければ、自動再生の出来ない原因(外気温が低い等)及びその原因に対する対処方法(安全な場所への移動等)をDPF情報56に表示して通知し、さらに現状のままであると走行を停止して手動DPF再生処理を行わなければならなくなるまでの手動再生猶予時間をDPF情報56に表示して通知する。
【0038】
なお、作業中に自動DPF再生が始まると、エンジン7のトルク設定を低くし、変速レバーによる車速低下を速くし車速増加を緩やかにし、自動での車速低下を大きくすることで、急激なエンジン回転の低下を防止して安定した自動DPF再生が行われる。
【0039】
また、収穫物選択手段としての麦・米切換スイッチ62を麦に切り換えると、自動DPF再生が始まるブースト温度センサ40の温度を高く切り換えることで、軽負荷による自動DPF再生の繰り返しを少なくする。
【0040】
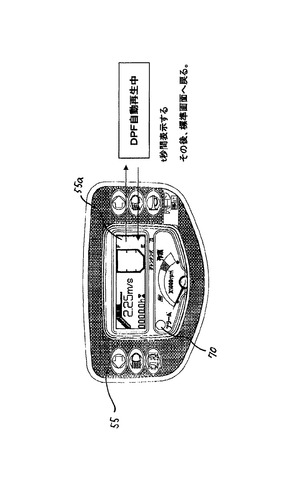
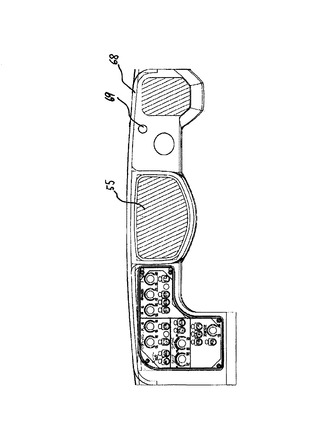
図9は、本機モニタ55を示し、その表示部55aにDPF情報56を表示するのであるが、DPFの再生中は「DPF自動再生中」の表示を繰り返し表示し、さらに、フロントパネル68に設けるDPFランプ69を点灯し、さらにアラームランプ70を点滅してDPF10が高温になっていることも注意を促す。なお、表示部55aへの表示は、「マフラー排気温度が高温になります。」や「停止時には十分注意してください。」と交互に表示しても良い。また、再生処理の進行状態をバー表示のランプを順次点灯することで表示すれば進行状態が分かり易い。
【0041】
DPF手動再生スイッチ53はフロントパネルの側部で作業者の膝近くや座席後方の電装品ボックス内に設け、受動再生時にも前記の表示部55aへの警告表示を行う。
【符号の説明】
【0042】
6 作業部(刈取装置)
7 エンジン
10 DPF
56 収穫物選択手段(麦・米切換スイッチ)
Am 未刈面積
【技術分野】
【0001】
本発明は、作業車輌のDPF再生制御装置及びこの作業車輌のDPF再生制御装置を備えるコンバインに関する。
【背景技術】
【0002】
コンバイン等の作業車輌は、ディーゼルエンジンが用いられ、その排気ガス浄化装置として、窒素酸化物を昇温させて吸着除去するDOC(Diesel Oxidation Catalyst)と、窒素酸化物に尿素を触媒として加水分解されたアンモニアを窒素酸化物に反応させて窒素酸化物を無害な窒素に変えるSCR(Selective Catalytic Reduction)とにより構成した技術が特許文献1に記載されている。
【0003】
また、排気ガス通路に配置した酸化触媒コンバータ(以下、「DOC」という)の酸化触媒の作用により排気ガス中のNOからNO2を生成し、このNO2を酸化材としてディーゼルパティキュレートフィルタ(以下、「DPF」という)で捕集した排気ガス中の黒煙などの粒子状物質(Particulate Matter、以下、「PM」という)を焼却除去する技術が特許文献2に記載されている。
【0004】
さらに、特許文献3には、DPFで捕集したPMを焼却除去する再生処理は高温になるために、安全な再生処理場所まで移動する余裕を持って、移動タイミングの到来を報知する報知装置を設けた作業機械が記載されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2011−24510号公報
【特許文献2】特許2006−97652号公報
【特許文献3】特許2011−7105号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
DPFにPMが蓄積され続けると排圧上昇等のトラブルが生じるため、蓄積されたPMを適宜焼却除去してDPFを再生する必要があり、PMの堆積量が許容量を超えた状態でPMを燃焼すると、DPFが溶損したり焼損したりする可能性があるために、許容量を超える前にDPFの焼却除去を行うことが必要である。そして、DPFの再生処理には、走行しながらDPFを高温にしてPMの焼却を行う自動PDF再生処理と走行を完全に停止してエンジンの燃料噴射を調整してPMの焼却を行う手動PDF再生処理がある。
【0007】
上記特許文献3に記載の技術では、GPS(Global Positioninng System)を利用した位置測定装置の移動データで作業位置から再生処理場所までの実測所要時間又は実測距離を利用して安全な再生処理場所でのDPFの再生処理に間に合うように戻り時期を予測して知らせるものであるが、この技術では、作業が完了するまでにDPFの再生処理が実行されるかどうかを判定することはできない。
【0008】
本発明は、作業車輌の作業対象領域の面積を自動的に認識して、その作業対象領域における作業を終了するまでに自動再生処理が始まるかを作業者に報知することで、作業者が作業計画を立て易くするし、収穫作業を能率的に行うことができる作業車輌を提供することを課題とする。
【課題を解決するための手段】
【0009】
上記本発明の課題は、次の技術手段により解決される。
請求項1に記載の発明は、エンジン(7)からの排気ガス中に含まれる粒子状物質を捕集するDPF(10)と、該DPF(10)内の温度を上昇させて粒子状物質を除去する自動再生処理を行う昇温手段と、DPF(10)における粒子状物質の堆積量を推定するPM堆積量推定手段と、機体の移動距離を算出する移動距離算出手段と、事前に設定された作業対象領域の面積と移動距離算出手段により算出される機体の移動距離と作業部(6)の作業幅とから前記作業対象領域中に残された未作業面積を自動的に算出する未作業面積算出手段とを備え、作業部(6)を駆動しながら走行している状態において、前記未作業面積算出手段により算出された未作業面積(Am)と作業部(6)の作業幅から作業が終了するまでに要する所要移動距離を算出し、又は、前記未作業面積算出手段により算出された未作業面積(Am)と機体の走行速度と作業部(6)の作業幅から作業が終了するまでに要する所要時間を算出し、前記PM堆積量推定手段により推定される粒子状物質の堆積量の移動平均から、DPF(10)における粒子状物質の堆積量が予め設定された設定堆積量に到達するまでの再生猶予時間又は再生猶予距離を算出し、該再生猶予時間が前記所要時間よりも大きいか、又は、前記再生猶予距離が所要移動距離よりも大きい場合に、当該作業中にDPF(10)の自動再生処理が行われることを報知するDPF再生報知手段を設けた作業車輌のDPF再生制御装置とする。
【0010】
請求項2に記載の発明は、前記未作業面積算出手段は、前記作業部(6)を駆動した状態での移動経路によって閉領域が形成された場合に、作業部(6)の作業幅と作業車輌の移動経路とから閉領域内の未作業面積(Am)を算出する構成とした請求項1に記載の作業車輌のDPF再生制御装置とする。
【0011】
請求項3に記載の発明は、前記DPF再生報知手段によって再生猶予時間又は再生猶予距離を通知する請求項1又は請求項2に記載の作業車輌のDPF再生制御装置とする。
請求項4に記載の発明は、前記昇温手段によってDPF(10)の自動再生処理が実行された状態においてPM堆積量推定手段により検出される粒子状物質の堆積量が増加する場合に、前記設定堆積量よりも大きい手動再生堆積量に到達するまでの手動再生猶予時間又は手動再生猶予距離をDPF再生報知手段で報知する請求項1又は請求項2又は請求項3に記載の作業車輌のDPF再生制御装置とする。
【0012】
請求項5に記載の発明は、前記作業部(6)としての刈取装置と、請求項1から請求項4のいずれか一項に記載の作業車輌のDPF再生制御装置を備えるコンバインとする。
【発明の効果】
【0013】
請求項1記載の発明によれば、コンバイン等の作業車輌を操縦して作業を行う作業者は、作業終了よりも早い段階でDPF10の自動再生処理が行われて作業能率が低下することを知ることができ、自動再生処理が行われる場合は、それに応じて作業計画を変更することができるので、収穫作業を能率的に行うことができる。
【0014】
請求項2記載の発明によれば、請求項1記載の発明による効果に加えて、機体の移動軌跡から自動的に未作業面積(Am)を算出して自動的にDPF再生報知手段で作業終了までにDPF(10)の再生処理が行われて出力低下が生じるかを作業者に報知することができる。
【0015】
請求項3記載の発明によれば、請求項1又は請求項2記載の発明による効果に加えて、再生処理が始まって作業能率が低下するまでの余裕を知って、詳細な作業計画を立てることができ、収穫作業を更に能率的に行うことができる。
【0016】
請求項4記載の発明によれば、請求項1又は請求項2又は請求項3に記載の発明による効果に加えて、再生条件が良好でなく、DPF(10)の自動再生処理ではPMの焼却が充分でない場合に、走行を停止して行う手動再生処理までの手動再生猶予時間または手動再生猶予距離を作業者が把握し、手動再生を行う場所まで安全に移動できる。
【0017】
請求項5記載の発明によれば、コンバインの収穫作業を能率的に行うことができる。
【図面の簡単な説明】
【0018】
【図1】コンバインの側面図である。
【図2】排気管の拡大平面図である。
【図3】コンバインのエンジン搭載状態を示す側面図である。
【図4】コンバインのエンジン搭載状態を示す平面図である。
【図5】自動制御のブロック図である。
【図6】自動PDF再生の報知制御フローチャート図である。
【図7】自動PDF再生の報知制御フローチャート図である。
【図8】コンバインの一部拡大正断面図である。
【図9】本機モニタの正面図である。
【図10】フロントパネルの正面図である。
【図11】コンバインの作業形態を示す説明図である。
【発明を実施するための形態】
【0019】
以下、本発明の実施形態を図面に示す実施例を参照しながら説明する。なお、左右とはコンバイン側から前方に向かって左と右をいうものとする。
図1はコンバインの側面図を示し、クローラ走行装置1を装備した走行車台2の前部右側にキャビン3を搭載し、このキャビン3の後部にグレンタンク4を搭載し、該グレンタンク4の左側に脱穀装置5を搭載している。走行車台2の前側には刈取装置(作業部)6を昇降可能に装着し、この刈取装置6で刈り取った穀稈をキャビン3の左側に設ける穀稈搬送装置で脱穀装置5に搬送する。
【0020】
エンジン7は、キャビン3の下部で走行車台2に搭載し、その前部排気管8をDOC9の上部に繋ぎ、DOC9からDPF10を通してDPF10の後下部から後方の地面に向けて後部排気管11から排気ガスを排出する。後部排気管11の後部には排気管冷却装置12を装着している。この排気管冷却装置12は、後部排気管11の外周に設ける吸気口12aから後部排気管11を囲んで排気口12b側に空気を誘導し、後部排気管11の外周に螺旋状に形成した誘導フィン11aで空気を後部排気管11の周囲で旋回させながら後方へ送って後部排気管11から地面に吹き出す排気ガスを冷却する。
【0021】
DOC9とDPF10の配置位置は、左側の脱穀装置5と右側のグレンタンク4の間で、かつピッチング油圧シリンダ13の左側で、走行車台2の左右及び前後の中央に位置して、キャビン3内の操縦席から離れている。このようなDPF10の位置は、脱穀装置5のトウミが吸い込む空気を暖めて収穫する穀粒を乾燥する効果がある。
【0022】
図8は、DPF10の取付構造を示し、受バンド64にDPF10を載せて前後二か所の締め付けバンド65を受バンド64にボルト67に締め付けて取り付けている。締め付けバンド65には取手66を設けて、締め付けバンド65及びDPF10の取り外しが容易に出来るようにしている。なお、締め付けバンド65をDPF10に固着すると、さらに取り外しが容易になる。
【0023】
なお、ピッチング油圧シリンダ13は、クローラ走行装置1の左右高さを調整する油圧シリンダである。
DPF10は、フィルターで捕集した排気ガス中の黒煙などの粒子状物質(PM)が所定量以上になるとポスト噴射によって燃焼させる再生処理を自動的に行うが、走行速度が一定速度以下であると、一定箇所に高温の排気ガスが排出されて排藁に着火する危険性がある。
【0024】
そして、DPF10の再生処理には、作業走行しながらDPF10を高温にしてPMの焼却を行う自動PDF再生処理と、安全な場所で走行を完全に停止してエンジンの燃料噴射を調整してPMの焼却を行う手動PDF再生処理がある。
【0025】
上記の自動PDF再生処理は、エンジン7の出力低下を招き、収穫作業の効率が低下して作業時間が長引くので、収穫作業中に再生処理が行われるかどうかを作業者に報知するために、次の制御を行っている。
【0026】
図5に自動制御のブロック図を示している。
本機コントローラ15に入力するデータ信号は、スピン旋回スイッチ16のオン・オフ信号と、刈取・脱穀スイッチ17のオン・オフ信号と、HST開度センサ19の開口信号と、移動速度検出手段としての車速センサ20による機体の走行速度と、オーガ排出スイッチ21のオン・オフ信号と、駐車ブレーキスイッチ25のオン・オフ信号と、麦・米切換スイッチ62のオン・オフ信号と、GPSデータ63としてGPSからの信号で検出する機体の現在位置データである。
【0027】
本機コントローラ15から出力する制御信号は、脱穀クラッチモータ30へのオン・オフ出力信号と、刈取クラッチモータ31へのオン・オフ出力信号と、オーガクラッチモータ32へのオン・オフ出力信号と、HSTポンプ比例弁37である。
【0028】
エンジンコントローラ38に入力するデータ信号は、水温センサ39のラジエータ水温と、ブースト温度センサ40の排気温度と、ブースト圧センサ41の排気圧と、エンジン回転センサ42のエンジン出力軸の回転数と、アクセル開度センサ43のアクセル開度と、燃料温度センサ44の燃料温度と、コモンレール圧力センサ45のコモンレール圧と、エアフローメータ46の吸気量とDPF差圧センサ47のDPFの吸排気圧力差(DPF前側圧力センサ47AとDPF後側圧力センサ47Bの圧力差)と、DOC入口温度センサ48のDOC入口温度と、DPF入口温度センサ49のDPF入口温度と、DPF出口温度センサ50のDPF出口温度である。
【0029】
エンジンコントローラ38から出力するする制御信号は、インジェクションノズル51への噴射信号と、DPFインジケータ52へのDPFの詰まり情報と、DPF手動再生スイッチ53へのオン信号と、吸気スロットル54の吸気絞り信号で、本機モニタ55にDPF情報56と、水温57と、負荷58と、グロー温度59と、オイルプレシャー60と、エンジン回転数61が送られて表示する。
【0030】
PM堆積量推測手段は、エンジンコントローラ38が取得するDPF差圧センサ47のDPFの吸排気圧力差からPMの堆積量を推測し、走行開始のPM堆積量と走行距離から読み取るPM堆積推移グラフのデータで、現在のPMの堆積量を推測する。
【0031】
移動距離算出手段は、前記車速センサ20から入力されるパルス信号と駆動輪の単位回転量あたりの移動距離を元に移動距離を算出する。この移動距離は、GPSによる位置情報から算出するようにしてもよい。
【0032】
また、未刈面積検出手段(未作業面積算出手段)は、図11に示すとおり、本機コントローラ15が取得するGPSからの地図データで、コンバインCの移動軌跡Tkがが圃場の周囲を回刈りして閉ループを描くとその閉ループを作業圃場として認識し、閉ループ内の領域から刈取装置6の作業幅におけるGPSの通信装置の位置よりも未刈側に張出した分の面積を減じて未刈面積(未作業面積)Amを積分により算出する。すなわち、事前に作業圃場の形状や面積が入力されていなくても回刈り作業により移動軌跡Tkが閉ループを描くと未刈領域を算出できる。
【0033】
また、未刈面積算出手段は、予め入力された作業圃場の面積と走行距離算出手段により算出される機体の移動距離と、作業部6の作業幅とから未刈面積Amを算出するようにしてもよい。
【0034】
さらに、コンバインの作業開始は刈取・脱穀スイッチ17を入れることで検出する。
図6は、一つの圃場を収穫作業するに、収穫作業中に自動PDF再生(DPF10の温度を上昇させてPMを焼却する制御で、エンジン出力が低下して作業能率が低下する。)があるかどうかを作業者に知らせる自動DPF再生通知制御である。この自動DPF再生通知制御は作業見通しを立てるのに利用することができる。
【0035】
前記のPM堆積量推測手段でDPF10のPM堆積状況を推定し、回刈り等、コンバインの移動軌跡によって閉領域が形成された場合に未刈面積Am検出手段によって未刈地の面積を算出する。そして、この閉領域が形成された段階でのDPF10のPM堆積量を推定し、外周移動中の移動距離算出手段によって移動距離を算出し、前記作業面積算出手段により算出された未刈面積Amと移動距離算出手段により算出された移動距離と刈取装置6の作業幅とから、作業圃場の収穫が終了するまでに要する作業所要時間(所要移動時間)又は作業所要距離(所要移動距離)を算出し、前記未刈面積Amと前記移動距離と外周移動中のPM堆積量の変化量から粒子状物質の堆積量が予め設定された設定堆積量に到達するまでの再生猶予時間又は再生猶予距離を算出し、再生猶予時間が前記作業所要時間より大きい場合か、又は、再生猶予距離が作業所要距離より大きい場合は、DPF再生報知手段としての本機モニタ55のDPF情報56に何分後の作業中に自動PDF再生が始まることを表示して作業者に通知する。なお、未刈面積Amは、作業者が手動で入力するようにしても良い。
【0036】
図7は、作業中の自動DPF再生が出来ない場合の制御で、前記のPM堆積量推測手段で自動DPF再生が行われるかを判断し、現在の作業状態で自動DPF再生を行える条件(外気温が低すぎなくてDPF10の温度上昇が可能)であるかを判断し、条件を満たせば自動DPF再生を実行して、再生途中では再生状況を本機モニタ55のDPF情報56に表示しながら再生が終了すると自動再生の終了をDPF情報56に表示する。
【0037】
また、外気温が低すぎて自動DPF再生が出来なければ、自動再生の出来ない原因(外気温が低い等)及びその原因に対する対処方法(安全な場所への移動等)をDPF情報56に表示して通知し、さらに現状のままであると走行を停止して手動DPF再生処理を行わなければならなくなるまでの手動再生猶予時間をDPF情報56に表示して通知する。
【0038】
なお、作業中に自動DPF再生が始まると、エンジン7のトルク設定を低くし、変速レバーによる車速低下を速くし車速増加を緩やかにし、自動での車速低下を大きくすることで、急激なエンジン回転の低下を防止して安定した自動DPF再生が行われる。
【0039】
また、収穫物選択手段としての麦・米切換スイッチ62を麦に切り換えると、自動DPF再生が始まるブースト温度センサ40の温度を高く切り換えることで、軽負荷による自動DPF再生の繰り返しを少なくする。
【0040】
図9は、本機モニタ55を示し、その表示部55aにDPF情報56を表示するのであるが、DPFの再生中は「DPF自動再生中」の表示を繰り返し表示し、さらに、フロントパネル68に設けるDPFランプ69を点灯し、さらにアラームランプ70を点滅してDPF10が高温になっていることも注意を促す。なお、表示部55aへの表示は、「マフラー排気温度が高温になります。」や「停止時には十分注意してください。」と交互に表示しても良い。また、再生処理の進行状態をバー表示のランプを順次点灯することで表示すれば進行状態が分かり易い。
【0041】
DPF手動再生スイッチ53はフロントパネルの側部で作業者の膝近くや座席後方の電装品ボックス内に設け、受動再生時にも前記の表示部55aへの警告表示を行う。
【符号の説明】
【0042】
6 作業部(刈取装置)
7 エンジン
10 DPF
56 収穫物選択手段(麦・米切換スイッチ)
Am 未刈面積
【特許請求の範囲】
【請求項1】
エンジン(7)からの排気ガス中に含まれる粒子状物質を捕集するDPF(10)と、該DPF(10)内の温度を上昇させて粒子状物質を除去する自動再生処理を行う昇温手段と、DPF(10)における粒子状物質の堆積量を推定するPM堆積量推定手段と、機体の移動距離を算出する移動距離算出手段と、事前に設定された作業対象領域の面積と移動距離算出手段により算出される機体の移動距離と作業部(6)の作業幅とから前記作業対象領域中に残された未作業面積を自動的に算出する未作業面積算出手段とを備え、
作業部(6)を駆動しながら走行している状態において、前記未作業面積算出手段により算出された未作業面積(Am)と作業部(6)の作業幅から作業が終了するまでに要する所要移動距離を算出し、又は、前記未作業面積算出手段により算出された未作業面積(Am)と機体の走行速度と作業部(6)の作業幅から作業が終了するまでに要する所要時間を算出し、
前記PM堆積量推定手段により推定される粒子状物質の堆積量の移動平均から、DPF(10)における粒子状物質の堆積量が予め設定された設定堆積量に到達するまでの再生猶予時間又は再生猶予距離を算出し、該再生猶予時間が前記所要時間よりも大きいか、又は、前記再生猶予距離が所要移動距離よりも大きい場合に、当該作業中にDPF(10)の自動再生処理が行われることを報知するDPF再生報知手段を設けた作業車輌のDPF再生制御装置。
【請求項2】
前記未作業面積算出手段は、前記作業部(6)を駆動した状態での移動経路によって閉領域が形成された場合に、作業部(6)の作業幅と作業車輌の移動経路とから閉領域内の未作業面積(Am)を算出する構成とした請求項1に記載の作業車輌のDPF再生制御装置。
【請求項3】
前記DPF再生報知手段によって再生猶予時間又は再生猶予距離を通知する請求項1又は請求項2に記載の作業車輌のDPF再生制御装置。
【請求項4】
前記昇温手段によってDPF(10)の自動再生処理が実行された状態においてPM堆積量推定手段により検出される粒子状物質の堆積量が増加する場合に、前記設定堆積量よりも大きい手動再生堆積量に到達するまでの手動再生猶予時間又は手動再生猶予距離をDPF再生報知手段で報知する請求項1又は請求項2又は請求項3に記載の作業車輌のDPF再生制御装置。
【請求項5】
前記作業部(6)としての刈取装置と、請求項1から請求項4のいずれか一項に記載の作業車輌のDPF再生制御装置を備えるコンバイン。
【請求項1】
エンジン(7)からの排気ガス中に含まれる粒子状物質を捕集するDPF(10)と、該DPF(10)内の温度を上昇させて粒子状物質を除去する自動再生処理を行う昇温手段と、DPF(10)における粒子状物質の堆積量を推定するPM堆積量推定手段と、機体の移動距離を算出する移動距離算出手段と、事前に設定された作業対象領域の面積と移動距離算出手段により算出される機体の移動距離と作業部(6)の作業幅とから前記作業対象領域中に残された未作業面積を自動的に算出する未作業面積算出手段とを備え、
作業部(6)を駆動しながら走行している状態において、前記未作業面積算出手段により算出された未作業面積(Am)と作業部(6)の作業幅から作業が終了するまでに要する所要移動距離を算出し、又は、前記未作業面積算出手段により算出された未作業面積(Am)と機体の走行速度と作業部(6)の作業幅から作業が終了するまでに要する所要時間を算出し、
前記PM堆積量推定手段により推定される粒子状物質の堆積量の移動平均から、DPF(10)における粒子状物質の堆積量が予め設定された設定堆積量に到達するまでの再生猶予時間又は再生猶予距離を算出し、該再生猶予時間が前記所要時間よりも大きいか、又は、前記再生猶予距離が所要移動距離よりも大きい場合に、当該作業中にDPF(10)の自動再生処理が行われることを報知するDPF再生報知手段を設けた作業車輌のDPF再生制御装置。
【請求項2】
前記未作業面積算出手段は、前記作業部(6)を駆動した状態での移動経路によって閉領域が形成された場合に、作業部(6)の作業幅と作業車輌の移動経路とから閉領域内の未作業面積(Am)を算出する構成とした請求項1に記載の作業車輌のDPF再生制御装置。
【請求項3】
前記DPF再生報知手段によって再生猶予時間又は再生猶予距離を通知する請求項1又は請求項2に記載の作業車輌のDPF再生制御装置。
【請求項4】
前記昇温手段によってDPF(10)の自動再生処理が実行された状態においてPM堆積量推定手段により検出される粒子状物質の堆積量が増加する場合に、前記設定堆積量よりも大きい手動再生堆積量に到達するまでの手動再生猶予時間又は手動再生猶予距離をDPF再生報知手段で報知する請求項1又は請求項2又は請求項3に記載の作業車輌のDPF再生制御装置。
【請求項5】
前記作業部(6)としての刈取装置と、請求項1から請求項4のいずれか一項に記載の作業車輌のDPF再生制御装置を備えるコンバイン。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2013−96291(P2013−96291A)
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願番号】特願2011−239150(P2011−239150)
【出願日】平成23年10月31日(2011.10.31)
【出願人】(000000125)井関農機株式会社 (3,813)
【Fターム(参考)】
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願日】平成23年10月31日(2011.10.31)
【出願人】(000000125)井関農機株式会社 (3,813)
【Fターム(参考)】
[ Back to top ]