
倍力操舵装置
【課題】一般の故障原因については一般のフェールセーフ制御を達成しながら、故障原因が重大なものでなく、操舵補助を解除すると、むしろ、車両の操舵復帰力がハンドルを通して運転者に違和感、あるいは、操舵性の変化を感じさせてしまうのを回避可能な倍力操舵装置を提供する。
【解決手段】フェールセーフ機構11を備えた倍力操舵装置20であって、フェールセーフ機構11は、倍力操舵装置20の制御機構を複数の故障原因について併行して監視しながら、危険度テーブルを個々の故障原因に対応して用い、前記複数の故障原因の内、故障原因が直接操舵補助の解除とならず、操舵補助を解除すると車両の操舵復帰力が運転者の操舵性に影響を与える特定故障原因の場合には、その特定故障原因の危険度テーブルの危険度をより緩和するようにした。
【解決手段】フェールセーフ機構11を備えた倍力操舵装置20であって、フェールセーフ機構11は、倍力操舵装置20の制御機構を複数の故障原因について併行して監視しながら、危険度テーブルを個々の故障原因に対応して用い、前記複数の故障原因の内、故障原因が直接操舵補助の解除とならず、操舵補助を解除すると車両の操舵復帰力が運転者の操舵性に影響を与える特定故障原因の場合には、その特定故障原因の危険度テーブルの危険度をより緩和するようにした。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両を運転する運転者の操舵力を補助する倍力操舵装置(「パワーステアリング装置」とも言う。)であって、フェールセーフ機構を備えたものに関する。
【背景技術】
【0002】
倍力操舵装置は、運転者の操舵力を補助するものであるが、その制御機構が故障した場合には、運転者の望まない操舵補助を行うこととなるので、これを防止するために、制御機構の故障原因を監視して、操舵補助を解除するようにするフェールセーフ機構を備えたものが多い。
【0003】
特許文献1は、そのようなフェールセーフ機構(特許文献1では、「フェールセーフ制御機構」と称している。)の一例を提案している。この特許文献1のものを、フェールセーフ機構Aと称する。
【0004】
このフェールセーフ機構Aは、操舵トルクセンサと車速センサとからの信号に基づいて危険度を特定する危険度テーブルを備え、この危険度テーブルの危険度に応じて異常を判断するための閾値を設定し、操舵補助力を与える駆動手段に出力されるアシスト信号と、このアシスト信号によって駆動された駆動手段からのフィードバック信号との差の絶対値が前記閾値を越えたときに異常と判断し、操舵補助の解除を行うものである。
【0005】
このような構成で、このフェールセーフ機構Aによれば、条件に応じて閾値を可変にしたので、実際の状況に応じた適切なフェールセーフ制御をすることができる(特許文献1の段落[0032])。
【0006】
しかしながら、このフェールセーフ機構Aについては、故障原因が重大なものでなく、操舵補助を解除すると、むしろ、車両の操舵復帰力が操舵輪(ハンドル)を通して運転者に違和感、あるいは、操舵性の変化を感じさせてしまうような場合への対応についての記載はなかった。
【0007】
特許文献2は、フェールセーフ機構を構成するセンサの異常検出装置を提案している。この異常検出装置は、明示的な記載はないが、車両用の倍力操舵装置にも適用可能なもので、操舵トルクセンサとして同一的に作動するメインセンサとサブセンサとの2つのセンサを用い、双方に逆極性の電圧を印加し、両センサの出力の絶対値の差が所定値以上になったときにセンサの異常を判断するものである。
【0008】
この異常検出装置は、このような構成とすることで、単にいずれか一方のセンサの故障時だけでなく、回路の各部の抵抗変化時などにもこれを正確に判断でき、また、センサ間に短絡を生じたときにも、正しくこれを識別することができる(特許文献2の頁3右欄30行目から36行目)。
【0009】
しかし、この異常検出装置についても、故障原因が重大なものでなく、操舵補助を解除すると、むしろ、車両の操舵復帰力がハンドルを通して運転者に違和感、あるいは、操舵性の変化を感じさせてしまうような場合への対応についての記載はなかった。
【特許文献1】特開2004−299616号公報(図1、図2、図3)
【特許文献2】特許第2572878号公報(第1図)
【発明の開示】
【発明が解決しようとする課題】
【0010】
本発明は、上記問題を改善しようとするもので、一般の故障原因については一般のフェールセーフ制御を達成しながら、故障原因が重大なものでなく、操舵補助を解除すると、むしろ、車両の操舵復帰力が操舵輪を通して運転者に違和感、あるいは、操舵性の変化を感じさせてしまうのを回避可能な倍力操舵装置を提供することを目的としている。
【課題を解決するための手段】
【0011】
本発明の倍力操舵装置は、フェールセーフ機構を備えた倍力操舵装置であって、
前記フェールセーフ機構は、前記倍力操舵装置の制御機構を複数の故障原因について併行して監視しながら、運転者の操舵力が小さいほど操舵補助の解除をより早く行うように危険度を大きく設定し、かつ、車速が大きくなるほどより小さい操舵力に対して操舵補助の解除を行うように危険度を大きく設定する危険度テーブルを個々の故障原因に対応して用い、
前記複数の故障原因の内、故障原因が直接操舵補助の解除とならず、操舵補助を解除すると車両の操舵復帰力が運転者の操舵性に影響を与える特定故障原因の場合には、その特定故障原因の危険度テーブルの危険度をより緩和するようにしたことを特徴とする。
【発明の効果】
【0012】
本発明の倍力操舵装置によれば、フェールセーフ機構を備えた倍力操舵装置であって、
前記フェールセーフ機構は、前記倍力操舵装置の制御機構を複数の故障原因について併行して監視しながら、運転者の操舵力が小さいほど操舵補助の解除をより早く行うように危険度を大きく設定し、かつ、車速が大きくなるほどより小さい操舵力に対して操舵補助の解除を行うように危険度を大きく設定する危険度テーブルを個々の故障原因に対応して用い、
前記複数の故障原因の内、故障原因が直接操舵補助の解除とならず、操舵補助を解除すると車両の操舵復帰力が運転者の操舵性に影響を与える特定故障原因の場合には、その特定故障原因の危険度テーブルの危険度をより緩和するようにしたので、一般のフェールセーフ機能は確保されると共に、特定故障原因の場合は、操舵補助を維持して、車両の操舵復帰力による運転者の操舵性への違和感をなくし、安全性を向上させることができる。
【0013】
つまり、この倍力操舵装置によれば、一般の故障原因については一般のフェールセーフ制御を達成しながら、故障原因が重大なものでなく、操舵補助を解除すると、むしろ、車両の操舵復帰力がハンドルを通して運転者に違和感、あるいは、操舵性の変化を感じさせてしまうのを回避可能とすることができる。
【発明を実施するための最良の形態】
【0014】
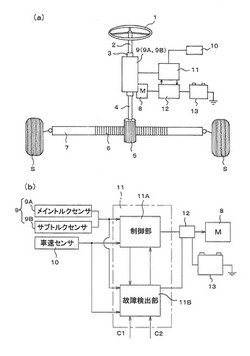
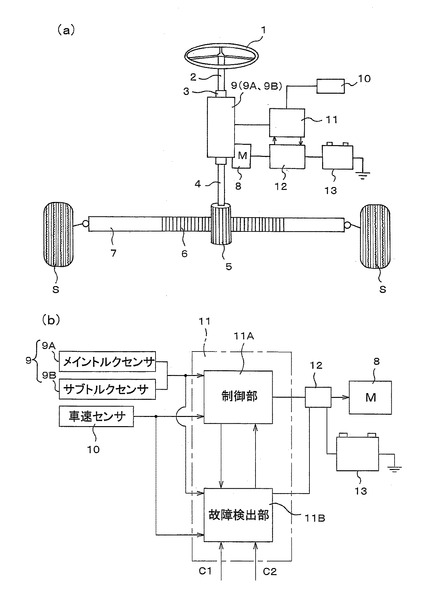
以下に、本発明の実施の形態について、図面を用いて説明する。図1(a)は、本発明の、フェールセーフ機構を備えた倍力操舵装置の一例を示す図、(b)は(a)の制御機構を示すブロック図である。
【0015】
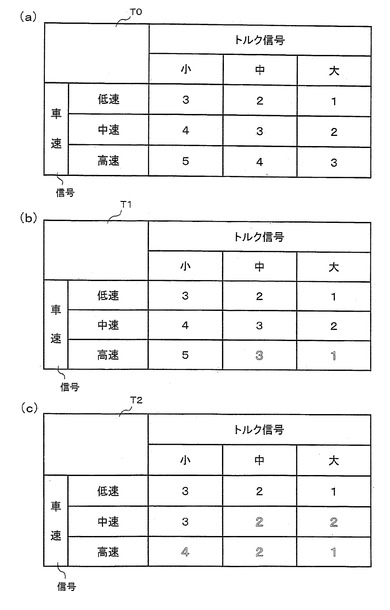
図2は、図1のフェールセーフ機構が用いる故障原因毎の危険度テーブルを例示するもので、(a)は一般の故障原因に用いる危険度テーブルを示す図、(b)は特定故障原因の一例の場合に用いる危険度テーブルを示す図、(c)は特定故障原因の他例の場合に用いる危険度テーブルを示す図である。
【0016】
この倍力操舵装置20は、運転者の操舵のための操舵輪(ハンドル)1と、この操舵輪1の操舵力を伝える操舵軸2と、この操舵軸2からの操舵力を受ける入力軸3と、この入力軸3からの操舵力を受ける出力軸4と、この出力軸4の先端に設けられたピニオン5と、このピニオン5に噛み合うラック6を備え、回転操舵力を直線状の操舵力に変換して車輪Sを操舵(向きを変える。)する操舵ラック軸7とを備えている。
【0017】
この倍力操舵装置20は、また、入力軸3と出力軸4との間のトルクを検出するトルクセンサ9と、この倍力操舵装置20を備えた車両の速度を検出する車速センサ10と、これら両センサ9、10の出力に基づき、出力軸4を補助回動させて、操舵補助力を発生させる操舵補助駆動手段8とを備えている。
【0018】
トルクセンサ9は、運転者の操舵力を検出するメイントルクセンサ9Aと、このメイントルクセンサ9Aと併行代替可能に設けられ、同様に運転者の操舵力を検出するサブトルクセンサ9Bとを備えている。このようなメインとサブとの二つのトルクセンサ9A、9Bとを備えている点は、特許文献2と同様であり、センサ回路を二重化してトルク検出の安全性を高めるものである。
【0019】
また、倍力操舵装置20は、トルクセンサ9、車速センサ10などからの検出信号を受けて、操舵補助駆動手段8を駆動制御する制御部11Aと、両センサ9、10及び種々のセンサ類からの検出信号C1、C2などを受けて故障原因を検出する故障検出部11Bとからなるフェールセーフ機構11を備えている。
【0020】
加えて、倍力操舵装置20は、制御部11Aからの制御信号に基づいて、電源(バッテリー)13を操舵補助駆動手段8に断接するリレー12を備えている。この電源13は、操舵補助に用いられるものであるが、フェールセーフ機構11を含めて、この倍力操舵装置20を備えた車両の各部への電源ともなるものである。
【0021】
このような構成において、この倍力操舵装置20は、既述の内容を含め、図2(a)、(b)、(c)に示すように、そのフェールセーフ機構11が、倍力操舵装置20の制御機構を複数の故障原因について併行して監視しながら、運転者の操舵力が小さいほど操舵補助の解除をより早く行うように危険度を大きく設定し、かつ、車速が大きくなるほどより小さい操舵力に対して操舵補助の解除を行うように危険度を大きく設定する危険度テーブルT0、T1、T2を個々の故障原因に対応して用いることを一つの特徴とする。
【0022】
つまり、後述するような緩和した危険度テーブルT1、T2を用いる場合と、一般の危険度テーブルT0を用いる場合とを、併行して監視しているので、緩和状態の危険度テーブルT1、T2を用いている場合でも、重大故障の場合は、直ちに、操舵補助を解除して一般のフェールセーフ機能を発揮することができる。
【0023】
図2(a)の危険度テーブルT0は、一般の故障原因の場合に用いられるもので、横軸にトルクセンサ9からのトルク信号に対応し、縦軸に車速センサ10からの車速信号に対応して、運転者の操舵力が小さいほど操舵補助の解除をより早く行うように危険度を大きく、かつ、車速が大きくなるほどより小さい操舵力に対して操舵補助の解除を行うように危険度を大きく、1から5の5段階で設定した危険度を持つテーブルである。
【0024】
この危険度テーブルT0は、基本的に、特許文献1の図3に示されたものと同様のものとなっており、危険度5の場合は、閾値を小さくし、故障の発生時に出来る限り速やかに操舵補助の解除、つまり、操舵補助駆動手段8への電源13を切断する。
【0025】
一方、危険度1の場合は、閾値を大きくし、故障が発生しても、出来る限り操舵補助を維持し、操舵補助の解除をすぐには行わないようにする。
【0026】
この一般的な危険度テーブルT0は、例えば、トルクセンサ9の回路不良、コネクター不良、あるいは、ハーネス不良、また、操舵補助駆動手段8が電動モータである場合のレゾルバ(モータ回転数検出手段)の検出不良、回路不良、電動モータの発火などが故障原因の場合に用いる。
【0027】
一方、フェールセーフ機構11は、リアルアイムにタイムシェアリングしながら複数の故障原因を併行して監視しており、例えば、その故障原因が直接操舵補助の解除とならず、操舵補助を解除すると車両の操舵復帰力が運転者の操舵性に影響を与える特定故障原因の場合には、その特定故障原因の危険度テーブルT1、T2の危険度を、図2(b)、(c)に示すように、より緩和するようにしたことを特徴とする。
【0028】
図2(b)の危険度テーブルT1は、特定故障原因が、トルクセンサ9に併行して設けられたメイントルクセンサ9Aとサブトルクセンサ9Bとがそれぞれ検出する操舵力の差(「メインサブ差」という。)である場合に用いられるもので、テーブルT1の高速でトルク信号が中、大の場合の危険度(白抜き数字)が、テーブルT0に比べて、小さくなり、危険度が(特にトルク大の場合により大きく)緩和されている。
【0029】
つまり、高速走行中は、少しの操舵でも車両が大きく曲がる。しかし、メインサブ差を原因として操舵補助解除に入る場合の操舵補助力はそれほど大きくなく、逆に、すぐに操舵補助解除がなされると、車両の操舵復帰力(セルフアライニングトルク)で操舵輪1が戻される方が、危険な状態となるからである。
【0030】
というのも、今まで小さい力で操舵出来ていたものが、操舵補助解除がなされたため、車両の操舵復帰力に対抗する大きな力で操舵する必要が生じ、運転者としては、操舵輪1が逆に取られるように感じ、操舵性に影響を与えるからである。このように操舵補助を維持することは、運転者には、より違和感のない操舵性を与え、安全性もより高いものとなる。
【0031】
図2(c)の危険度テーブルT2は、特定故障原因が、操舵補助の駆動力を与える電源13を操舵補助の駆動手段8に断接するリレー12のリレー接点電圧である場合に用いるもので、テーブルT2の中速、中トルクの場合と、高速でトルク信号が小、中、大の場合の危険度(白抜き数字)が、テーブルT0に比べて、小さくなり、危険度が(特に高速で、トルク中、大の場合により大きく)緩和されている。
【0032】
リレー12のリレー接点電圧が異常(正常でない一定の電圧範囲内)となった場合は、従前は電動モータ8の電流を一定の比率で漸減させていたが、この場合も、中速とくに高速の場合は、この漸減により操舵補助の漸次解除がなされると、車両の操舵復帰力の方が大きく操舵輪1に作用して、運転者に違和感を与える。
【0033】
つまり、車速信号が高速で、トルク信号が大の時ほど、車両の操舵復帰力が大きく働いている。その時に、電動モータ8の電流が漸減したりOFFとなると、より操舵輪1が戻されるように感じられ、かつ、操舵が戻され車両は直線走行しようとするため、運転者の狙いの操舵位置から外れる。よって、危険度を緩和して、そのような事態とならないようにしているのである。
【0034】
以上を纏めると、本発明のフェールセーフ機構11の考え方は、補助解除に入った時は、最終的には手動操舵(マニュアルハンドリング)にして運転者の意思に反しない操舵に移行するが、高速で操舵復帰力が大きい場合には、重大な故障原因(セルフステア大、発火)以外、つまり、特定故障原因の場合には、出来る限り現状維持、つまり、操舵補助の維持をした方がよりフェールセーフに、安全になるというものである。
【0035】
結局、本発明の倍力操舵装置20によれば、上記のようなフェールセーフ機構11を備えているので、一般の故障原因については一般のフェールセーフ制御を達成しながら、故障原因が重大なものでなく、操舵補助を解除すると、むしろ、車両の操舵復帰力がハンドルを通して運転者に違和感、あるいは、操舵性の変化を感じさせてしまうのを回避可能とすることができる。
【0036】
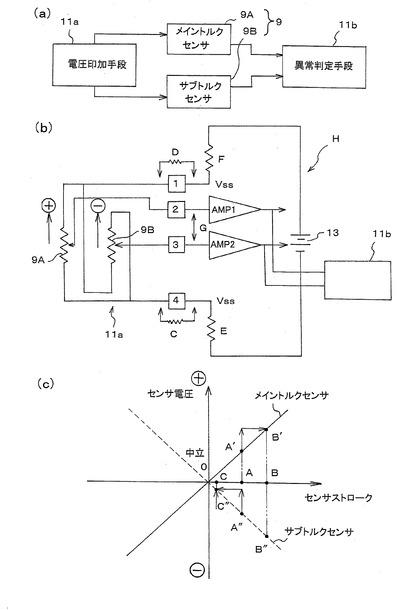
ここで、上述のメインサブ差という特定故障原因を判定する具体例について詳しく説明する。図3は、特定故障原因のメインサブ差を判定する具体的な構成の一例を示すもので、(a)はそのブロック図、(b)はその回路図、(c)は(b)の両センサの出力特性図である。
【0037】
この構成は、特許文献2に記載の可変抵抗型センサの二重化構造を、本発明に適用したものであって、図3(a)、(b)に示すように、その基本的構成は、両トルクセンサ9A、9Bを可変抵抗型で同一的に動作するものとし、これらメイントルクセンサ9A、サブトルクセンサ9Bに一系統の共通の電源13から互い違いに配線して逆極性の電圧を印加する電圧印加手段11aを備えた点を一つの特徴とする。
【0038】
また、この構成は、この印加電圧が変動するか電源13とメイントルクセンサ9A、サブトルクセンサ9B間の抵抗変動により両センサ9A、9Bの出力が変化してこれら両センサの出力の絶対値の差が所定値以上となったときにセンサの異常を判定する異常判定手段11bとを備えた点を他の特徴とする。
【0039】
上記の電圧印加手段11aと、異常判定手段11bとは、図1(b)のフェールセーフ機構11に含まれるものである。また、図3(b)の回路図の他の部分は、特許文献2に記載された従来技術と同一であるので、詳しい説明は省略する。
【0040】
特許文献2によれば、このような二重化構造のメインサブ差故障検出回路Hによると、図3(c)に示すように、正常時にはセンサ出力はセンサストローク(操舵者の操舵トルクに対応)に応じて、中立点を基準にして一方は増加、他方は減少するように変化し、また、両センサの出力の絶対値は等しい。
【0041】
これに対して、センサストロークが変化しなくても回路抵抗の変動等の異常(図3(b)の符号C、D、E、Fの異常)があると、その電圧変化分だけセンサ出力は変化する。この電圧変化分は同一方向の出力変化として現れるため、両センサの出力の絶対値は相違してくる。
【0042】
これにより、センサストロークの変動以外の理由でセンサ出力が変化する場合にも、両センサの出力の絶対値の差に変化があらわれ、異常が発生していると判断することができる。
【0043】
また、両センサ間(図3(b)の符号G)が短絡したときに瞬時に出力が中立位置(ゼロ点)に変化するが、この変化は通常のセンサストロークが中立位置に復帰するときの速度よりもはるかに速く、したがって単位時間当たりの変化幅も大きい。
【0044】
しかも、通常ならば中立位置に向けて素早くセンサストロークが変化したときは、慣性等により中立位置に静止せずにセンサ出力が中立位置から変動するが、このような故障時にはセンサ出力は中立位置から一切変化しないため、これらから両センサの短絡による異常の発生をも的確に判断することができる。
【0045】
以下、このメインサブ差故障検出回路Hについて、図3(b)、(c)を用いて、特許文献2に基づき、より詳しく説明する。
【0046】
図3(b)において、メイントルクセンサ9Aとサブトルクセンサ9Bとは、共通の電源13に対して、並列ではあるが、互いに逆極性となるように、接続されている。つまり、両センサ9A、9Bの作動方向は同一であるが、その出力特性は図3(c)にも示すように、例えばメイントルクセンサ9Aの出力が中立位置(ゼロ点)からセンサストロークに応じてリニヤに増加(正の出力電圧)していくのに対し(A′→B′)、サブトルクセンサ9Bの出力はゼロ点からリニヤに減少(負の出力電圧)していく(A″→B″)ように、互いに逆極性に接続される。
【0047】
そして、センサ部分及びアンプAMP1,AMP2の部分が二重化され、その他の部分は共通の回路で構成されている。
【0048】
したがって、この二重化回路においては、メイントルクセンサ9Aとサブトルクセンサ9Bの各出力は、図3(c)に示す通り、センサストロークに応じて互いに増減の方向が逆で、かつストロークに応じて出力の差が比例的に変化(増減)する。なお、実際にセンサ出力を利用するときには、サブトルクセンサ9Bの出力をインバータ等により反転すること(絶対値を取ることになる。)で、メイントルクセンサ9Aの出力と一致させることができる。
【0049】
このセンサ出力から二重化回路の異常を判定するための異常判断手段11bは、マイコン等で構成されたフェールセーフ機構11の機能の一部として構成され、具体的には一定の手順に基づいた演算作動により、正常か異常かの判断を行う。なお、この演算動作は所定の単位時間毎に繰り返し実行される。
【0050】
つまり、正常時にはセンサ出力はセンサストロークに応じて一方は増加、他方は減少するように変化し、かつ両センサの出力の絶対値は常に等しいが、例えば、回路抵抗の変動等の異常があると、その電圧変化分だけセンサ出力は変化し、しかもこの電圧変化分は同一方向の出力変化として現れるため、両センサの出力の絶対値の差が変化する。
【0051】
したがって、センサ出力が変化し、両センサの出力の絶対値に差があるときは、異常が発生していると判断される。
【0052】
より詳しく、ステップで示すと、まず、ステップS1とS2で、メインセンサ出力値Vm(n)と、サブセンサ出力値Vs(n)とを読込み、また前回の各出力値Vm(n−1)とVs(n−1)とを読出す。
【0053】
そして、ステップS3で前回と今回とで各センサ出力値に変化があるか無いかを判断して、出力値に変化を生じたときは、ステップS4で今回のVmとVsとの各絶対値に所定値α以上の差を生じたかどうか(換言すると差がゼロかどうか)を判断する。
【0054】
各センサ9A、9Bが正常に作動しているときは、センサストロークに応じて出力が変化し、かつ両センサの出力差もストロークに応じてリニヤに変化するが、例えば図3(b)のC部分の抵抗が故障により増加したときなど、図3(c)にも示すように、センサストロークが変化しなくても、メインセンサ出力は、抵抗増加に相当する電圧値だけ、A′→B′へと変化し、サブセンサ出力も同一電圧値だけ増加して、A″→C″へと変化する。
【0055】
これらはいずれも同一方向への電圧の増加として現れるので、通常のストローク時のように、両センサの出力の絶対値は一致せず、両者の差が生じる。したがって、ステップS5でこの出力の絶対値の差が所定値以上のまま、これがN回連続したときは、異常判定手段11bは、センサ二重化回路に異常が発生したと判断して、故障信号を故障検出部11Bへ出力する。
【0056】
このような回路の異常は、C部分以外の、D,E,F部分についても同様に検出することができ、また、当然のことながらメイントルクセンサ9Aとサブトルクセンサ9Bのいずれか一方に故障が生じて異常出力値を生じたときにも、両センサ出力の絶対値の差を判定することにより、その異常を的確に検出することができる。
【0057】
本発明の倍力操舵装置は、上記の実施形態に限定されず、特許請求の範囲に記載された範囲、実施形態の範囲で、種々の変形例、組み合わせが可能であり、これらの変形例、組み合わせもその権利範囲に含むものである。
【産業上の利用可能性】
【0058】
本発明の倍力操舵装置は、一般の故障原因については一般のフェールセーフ制御を達成しながら、故障原因が重大なものでなく、操舵補助を解除すると、むしろ、車両の操舵復帰力がハンドルを通して運転者に違和感、あるいは、操舵性の変化を感じさせてしまうのを回避可能とすることが要請される産業分野に用いることができる。
【図面の簡単な説明】
【0059】
【図1】(a)は、本発明の、フェールセーフ機構を備えた倍力操舵装置の一例を示す図、(b)は(a)の制御機構を示すブロック図
【図2】図1のフェールセーフ機構が用いる故障原因毎の危険度テーブルを例示するもので、(a)は一般の故障原因に用いる危険度テーブルを示す図、(b)は特定故障原因の一例の場合に用いる危険度テーブルを示す図、(c)は特定故障原因の他例の場合に用いる危険度テーブルを示す図
【図3】特定故障原因のメインサブ差を判定する具体的な構成の一例を示すもので、(a)はそのブロック図、(b)はその回路図、(c)は(b)の両センサの出力特性図
【符号の説明】
【0060】
1 操舵輪(ハンドル)
2 操舵軸
3 出力軸
4 入力軸
5 ピニオン
6 ラック
7 操舵ラック軸
8 操舵補助駆動手段(電動モータ、流体圧駆動手段)
9 トルクセンサ
9A メイントルクセンサ
9B サブトルクセンサ
10 車速センサ
11 フェールセーフ機構
11A 制御部
11B 故障検出部
11a 電圧印加手段
11b 異常判定手段
12 リレー
13 電源(バッテリー)
20 倍力操舵装置
H メインサブ差故障検出回路
【技術分野】
【0001】
本発明は、車両を運転する運転者の操舵力を補助する倍力操舵装置(「パワーステアリング装置」とも言う。)であって、フェールセーフ機構を備えたものに関する。
【背景技術】
【0002】
倍力操舵装置は、運転者の操舵力を補助するものであるが、その制御機構が故障した場合には、運転者の望まない操舵補助を行うこととなるので、これを防止するために、制御機構の故障原因を監視して、操舵補助を解除するようにするフェールセーフ機構を備えたものが多い。
【0003】
特許文献1は、そのようなフェールセーフ機構(特許文献1では、「フェールセーフ制御機構」と称している。)の一例を提案している。この特許文献1のものを、フェールセーフ機構Aと称する。
【0004】
このフェールセーフ機構Aは、操舵トルクセンサと車速センサとからの信号に基づいて危険度を特定する危険度テーブルを備え、この危険度テーブルの危険度に応じて異常を判断するための閾値を設定し、操舵補助力を与える駆動手段に出力されるアシスト信号と、このアシスト信号によって駆動された駆動手段からのフィードバック信号との差の絶対値が前記閾値を越えたときに異常と判断し、操舵補助の解除を行うものである。
【0005】
このような構成で、このフェールセーフ機構Aによれば、条件に応じて閾値を可変にしたので、実際の状況に応じた適切なフェールセーフ制御をすることができる(特許文献1の段落[0032])。
【0006】
しかしながら、このフェールセーフ機構Aについては、故障原因が重大なものでなく、操舵補助を解除すると、むしろ、車両の操舵復帰力が操舵輪(ハンドル)を通して運転者に違和感、あるいは、操舵性の変化を感じさせてしまうような場合への対応についての記載はなかった。
【0007】
特許文献2は、フェールセーフ機構を構成するセンサの異常検出装置を提案している。この異常検出装置は、明示的な記載はないが、車両用の倍力操舵装置にも適用可能なもので、操舵トルクセンサとして同一的に作動するメインセンサとサブセンサとの2つのセンサを用い、双方に逆極性の電圧を印加し、両センサの出力の絶対値の差が所定値以上になったときにセンサの異常を判断するものである。
【0008】
この異常検出装置は、このような構成とすることで、単にいずれか一方のセンサの故障時だけでなく、回路の各部の抵抗変化時などにもこれを正確に判断でき、また、センサ間に短絡を生じたときにも、正しくこれを識別することができる(特許文献2の頁3右欄30行目から36行目)。
【0009】
しかし、この異常検出装置についても、故障原因が重大なものでなく、操舵補助を解除すると、むしろ、車両の操舵復帰力がハンドルを通して運転者に違和感、あるいは、操舵性の変化を感じさせてしまうような場合への対応についての記載はなかった。
【特許文献1】特開2004−299616号公報(図1、図2、図3)
【特許文献2】特許第2572878号公報(第1図)
【発明の開示】
【発明が解決しようとする課題】
【0010】
本発明は、上記問題を改善しようとするもので、一般の故障原因については一般のフェールセーフ制御を達成しながら、故障原因が重大なものでなく、操舵補助を解除すると、むしろ、車両の操舵復帰力が操舵輪を通して運転者に違和感、あるいは、操舵性の変化を感じさせてしまうのを回避可能な倍力操舵装置を提供することを目的としている。
【課題を解決するための手段】
【0011】
本発明の倍力操舵装置は、フェールセーフ機構を備えた倍力操舵装置であって、
前記フェールセーフ機構は、前記倍力操舵装置の制御機構を複数の故障原因について併行して監視しながら、運転者の操舵力が小さいほど操舵補助の解除をより早く行うように危険度を大きく設定し、かつ、車速が大きくなるほどより小さい操舵力に対して操舵補助の解除を行うように危険度を大きく設定する危険度テーブルを個々の故障原因に対応して用い、
前記複数の故障原因の内、故障原因が直接操舵補助の解除とならず、操舵補助を解除すると車両の操舵復帰力が運転者の操舵性に影響を与える特定故障原因の場合には、その特定故障原因の危険度テーブルの危険度をより緩和するようにしたことを特徴とする。
【発明の効果】
【0012】
本発明の倍力操舵装置によれば、フェールセーフ機構を備えた倍力操舵装置であって、
前記フェールセーフ機構は、前記倍力操舵装置の制御機構を複数の故障原因について併行して監視しながら、運転者の操舵力が小さいほど操舵補助の解除をより早く行うように危険度を大きく設定し、かつ、車速が大きくなるほどより小さい操舵力に対して操舵補助の解除を行うように危険度を大きく設定する危険度テーブルを個々の故障原因に対応して用い、
前記複数の故障原因の内、故障原因が直接操舵補助の解除とならず、操舵補助を解除すると車両の操舵復帰力が運転者の操舵性に影響を与える特定故障原因の場合には、その特定故障原因の危険度テーブルの危険度をより緩和するようにしたので、一般のフェールセーフ機能は確保されると共に、特定故障原因の場合は、操舵補助を維持して、車両の操舵復帰力による運転者の操舵性への違和感をなくし、安全性を向上させることができる。
【0013】
つまり、この倍力操舵装置によれば、一般の故障原因については一般のフェールセーフ制御を達成しながら、故障原因が重大なものでなく、操舵補助を解除すると、むしろ、車両の操舵復帰力がハンドルを通して運転者に違和感、あるいは、操舵性の変化を感じさせてしまうのを回避可能とすることができる。
【発明を実施するための最良の形態】
【0014】
以下に、本発明の実施の形態について、図面を用いて説明する。図1(a)は、本発明の、フェールセーフ機構を備えた倍力操舵装置の一例を示す図、(b)は(a)の制御機構を示すブロック図である。
【0015】
図2は、図1のフェールセーフ機構が用いる故障原因毎の危険度テーブルを例示するもので、(a)は一般の故障原因に用いる危険度テーブルを示す図、(b)は特定故障原因の一例の場合に用いる危険度テーブルを示す図、(c)は特定故障原因の他例の場合に用いる危険度テーブルを示す図である。
【0016】
この倍力操舵装置20は、運転者の操舵のための操舵輪(ハンドル)1と、この操舵輪1の操舵力を伝える操舵軸2と、この操舵軸2からの操舵力を受ける入力軸3と、この入力軸3からの操舵力を受ける出力軸4と、この出力軸4の先端に設けられたピニオン5と、このピニオン5に噛み合うラック6を備え、回転操舵力を直線状の操舵力に変換して車輪Sを操舵(向きを変える。)する操舵ラック軸7とを備えている。
【0017】
この倍力操舵装置20は、また、入力軸3と出力軸4との間のトルクを検出するトルクセンサ9と、この倍力操舵装置20を備えた車両の速度を検出する車速センサ10と、これら両センサ9、10の出力に基づき、出力軸4を補助回動させて、操舵補助力を発生させる操舵補助駆動手段8とを備えている。
【0018】
トルクセンサ9は、運転者の操舵力を検出するメイントルクセンサ9Aと、このメイントルクセンサ9Aと併行代替可能に設けられ、同様に運転者の操舵力を検出するサブトルクセンサ9Bとを備えている。このようなメインとサブとの二つのトルクセンサ9A、9Bとを備えている点は、特許文献2と同様であり、センサ回路を二重化してトルク検出の安全性を高めるものである。
【0019】
また、倍力操舵装置20は、トルクセンサ9、車速センサ10などからの検出信号を受けて、操舵補助駆動手段8を駆動制御する制御部11Aと、両センサ9、10及び種々のセンサ類からの検出信号C1、C2などを受けて故障原因を検出する故障検出部11Bとからなるフェールセーフ機構11を備えている。
【0020】
加えて、倍力操舵装置20は、制御部11Aからの制御信号に基づいて、電源(バッテリー)13を操舵補助駆動手段8に断接するリレー12を備えている。この電源13は、操舵補助に用いられるものであるが、フェールセーフ機構11を含めて、この倍力操舵装置20を備えた車両の各部への電源ともなるものである。
【0021】
このような構成において、この倍力操舵装置20は、既述の内容を含め、図2(a)、(b)、(c)に示すように、そのフェールセーフ機構11が、倍力操舵装置20の制御機構を複数の故障原因について併行して監視しながら、運転者の操舵力が小さいほど操舵補助の解除をより早く行うように危険度を大きく設定し、かつ、車速が大きくなるほどより小さい操舵力に対して操舵補助の解除を行うように危険度を大きく設定する危険度テーブルT0、T1、T2を個々の故障原因に対応して用いることを一つの特徴とする。
【0022】
つまり、後述するような緩和した危険度テーブルT1、T2を用いる場合と、一般の危険度テーブルT0を用いる場合とを、併行して監視しているので、緩和状態の危険度テーブルT1、T2を用いている場合でも、重大故障の場合は、直ちに、操舵補助を解除して一般のフェールセーフ機能を発揮することができる。
【0023】
図2(a)の危険度テーブルT0は、一般の故障原因の場合に用いられるもので、横軸にトルクセンサ9からのトルク信号に対応し、縦軸に車速センサ10からの車速信号に対応して、運転者の操舵力が小さいほど操舵補助の解除をより早く行うように危険度を大きく、かつ、車速が大きくなるほどより小さい操舵力に対して操舵補助の解除を行うように危険度を大きく、1から5の5段階で設定した危険度を持つテーブルである。
【0024】
この危険度テーブルT0は、基本的に、特許文献1の図3に示されたものと同様のものとなっており、危険度5の場合は、閾値を小さくし、故障の発生時に出来る限り速やかに操舵補助の解除、つまり、操舵補助駆動手段8への電源13を切断する。
【0025】
一方、危険度1の場合は、閾値を大きくし、故障が発生しても、出来る限り操舵補助を維持し、操舵補助の解除をすぐには行わないようにする。
【0026】
この一般的な危険度テーブルT0は、例えば、トルクセンサ9の回路不良、コネクター不良、あるいは、ハーネス不良、また、操舵補助駆動手段8が電動モータである場合のレゾルバ(モータ回転数検出手段)の検出不良、回路不良、電動モータの発火などが故障原因の場合に用いる。
【0027】
一方、フェールセーフ機構11は、リアルアイムにタイムシェアリングしながら複数の故障原因を併行して監視しており、例えば、その故障原因が直接操舵補助の解除とならず、操舵補助を解除すると車両の操舵復帰力が運転者の操舵性に影響を与える特定故障原因の場合には、その特定故障原因の危険度テーブルT1、T2の危険度を、図2(b)、(c)に示すように、より緩和するようにしたことを特徴とする。
【0028】
図2(b)の危険度テーブルT1は、特定故障原因が、トルクセンサ9に併行して設けられたメイントルクセンサ9Aとサブトルクセンサ9Bとがそれぞれ検出する操舵力の差(「メインサブ差」という。)である場合に用いられるもので、テーブルT1の高速でトルク信号が中、大の場合の危険度(白抜き数字)が、テーブルT0に比べて、小さくなり、危険度が(特にトルク大の場合により大きく)緩和されている。
【0029】
つまり、高速走行中は、少しの操舵でも車両が大きく曲がる。しかし、メインサブ差を原因として操舵補助解除に入る場合の操舵補助力はそれほど大きくなく、逆に、すぐに操舵補助解除がなされると、車両の操舵復帰力(セルフアライニングトルク)で操舵輪1が戻される方が、危険な状態となるからである。
【0030】
というのも、今まで小さい力で操舵出来ていたものが、操舵補助解除がなされたため、車両の操舵復帰力に対抗する大きな力で操舵する必要が生じ、運転者としては、操舵輪1が逆に取られるように感じ、操舵性に影響を与えるからである。このように操舵補助を維持することは、運転者には、より違和感のない操舵性を与え、安全性もより高いものとなる。
【0031】
図2(c)の危険度テーブルT2は、特定故障原因が、操舵補助の駆動力を与える電源13を操舵補助の駆動手段8に断接するリレー12のリレー接点電圧である場合に用いるもので、テーブルT2の中速、中トルクの場合と、高速でトルク信号が小、中、大の場合の危険度(白抜き数字)が、テーブルT0に比べて、小さくなり、危険度が(特に高速で、トルク中、大の場合により大きく)緩和されている。
【0032】
リレー12のリレー接点電圧が異常(正常でない一定の電圧範囲内)となった場合は、従前は電動モータ8の電流を一定の比率で漸減させていたが、この場合も、中速とくに高速の場合は、この漸減により操舵補助の漸次解除がなされると、車両の操舵復帰力の方が大きく操舵輪1に作用して、運転者に違和感を与える。
【0033】
つまり、車速信号が高速で、トルク信号が大の時ほど、車両の操舵復帰力が大きく働いている。その時に、電動モータ8の電流が漸減したりOFFとなると、より操舵輪1が戻されるように感じられ、かつ、操舵が戻され車両は直線走行しようとするため、運転者の狙いの操舵位置から外れる。よって、危険度を緩和して、そのような事態とならないようにしているのである。
【0034】
以上を纏めると、本発明のフェールセーフ機構11の考え方は、補助解除に入った時は、最終的には手動操舵(マニュアルハンドリング)にして運転者の意思に反しない操舵に移行するが、高速で操舵復帰力が大きい場合には、重大な故障原因(セルフステア大、発火)以外、つまり、特定故障原因の場合には、出来る限り現状維持、つまり、操舵補助の維持をした方がよりフェールセーフに、安全になるというものである。
【0035】
結局、本発明の倍力操舵装置20によれば、上記のようなフェールセーフ機構11を備えているので、一般の故障原因については一般のフェールセーフ制御を達成しながら、故障原因が重大なものでなく、操舵補助を解除すると、むしろ、車両の操舵復帰力がハンドルを通して運転者に違和感、あるいは、操舵性の変化を感じさせてしまうのを回避可能とすることができる。
【0036】
ここで、上述のメインサブ差という特定故障原因を判定する具体例について詳しく説明する。図3は、特定故障原因のメインサブ差を判定する具体的な構成の一例を示すもので、(a)はそのブロック図、(b)はその回路図、(c)は(b)の両センサの出力特性図である。
【0037】
この構成は、特許文献2に記載の可変抵抗型センサの二重化構造を、本発明に適用したものであって、図3(a)、(b)に示すように、その基本的構成は、両トルクセンサ9A、9Bを可変抵抗型で同一的に動作するものとし、これらメイントルクセンサ9A、サブトルクセンサ9Bに一系統の共通の電源13から互い違いに配線して逆極性の電圧を印加する電圧印加手段11aを備えた点を一つの特徴とする。
【0038】
また、この構成は、この印加電圧が変動するか電源13とメイントルクセンサ9A、サブトルクセンサ9B間の抵抗変動により両センサ9A、9Bの出力が変化してこれら両センサの出力の絶対値の差が所定値以上となったときにセンサの異常を判定する異常判定手段11bとを備えた点を他の特徴とする。
【0039】
上記の電圧印加手段11aと、異常判定手段11bとは、図1(b)のフェールセーフ機構11に含まれるものである。また、図3(b)の回路図の他の部分は、特許文献2に記載された従来技術と同一であるので、詳しい説明は省略する。
【0040】
特許文献2によれば、このような二重化構造のメインサブ差故障検出回路Hによると、図3(c)に示すように、正常時にはセンサ出力はセンサストローク(操舵者の操舵トルクに対応)に応じて、中立点を基準にして一方は増加、他方は減少するように変化し、また、両センサの出力の絶対値は等しい。
【0041】
これに対して、センサストロークが変化しなくても回路抵抗の変動等の異常(図3(b)の符号C、D、E、Fの異常)があると、その電圧変化分だけセンサ出力は変化する。この電圧変化分は同一方向の出力変化として現れるため、両センサの出力の絶対値は相違してくる。
【0042】
これにより、センサストロークの変動以外の理由でセンサ出力が変化する場合にも、両センサの出力の絶対値の差に変化があらわれ、異常が発生していると判断することができる。
【0043】
また、両センサ間(図3(b)の符号G)が短絡したときに瞬時に出力が中立位置(ゼロ点)に変化するが、この変化は通常のセンサストロークが中立位置に復帰するときの速度よりもはるかに速く、したがって単位時間当たりの変化幅も大きい。
【0044】
しかも、通常ならば中立位置に向けて素早くセンサストロークが変化したときは、慣性等により中立位置に静止せずにセンサ出力が中立位置から変動するが、このような故障時にはセンサ出力は中立位置から一切変化しないため、これらから両センサの短絡による異常の発生をも的確に判断することができる。
【0045】
以下、このメインサブ差故障検出回路Hについて、図3(b)、(c)を用いて、特許文献2に基づき、より詳しく説明する。
【0046】
図3(b)において、メイントルクセンサ9Aとサブトルクセンサ9Bとは、共通の電源13に対して、並列ではあるが、互いに逆極性となるように、接続されている。つまり、両センサ9A、9Bの作動方向は同一であるが、その出力特性は図3(c)にも示すように、例えばメイントルクセンサ9Aの出力が中立位置(ゼロ点)からセンサストロークに応じてリニヤに増加(正の出力電圧)していくのに対し(A′→B′)、サブトルクセンサ9Bの出力はゼロ点からリニヤに減少(負の出力電圧)していく(A″→B″)ように、互いに逆極性に接続される。
【0047】
そして、センサ部分及びアンプAMP1,AMP2の部分が二重化され、その他の部分は共通の回路で構成されている。
【0048】
したがって、この二重化回路においては、メイントルクセンサ9Aとサブトルクセンサ9Bの各出力は、図3(c)に示す通り、センサストロークに応じて互いに増減の方向が逆で、かつストロークに応じて出力の差が比例的に変化(増減)する。なお、実際にセンサ出力を利用するときには、サブトルクセンサ9Bの出力をインバータ等により反転すること(絶対値を取ることになる。)で、メイントルクセンサ9Aの出力と一致させることができる。
【0049】
このセンサ出力から二重化回路の異常を判定するための異常判断手段11bは、マイコン等で構成されたフェールセーフ機構11の機能の一部として構成され、具体的には一定の手順に基づいた演算作動により、正常か異常かの判断を行う。なお、この演算動作は所定の単位時間毎に繰り返し実行される。
【0050】
つまり、正常時にはセンサ出力はセンサストロークに応じて一方は増加、他方は減少するように変化し、かつ両センサの出力の絶対値は常に等しいが、例えば、回路抵抗の変動等の異常があると、その電圧変化分だけセンサ出力は変化し、しかもこの電圧変化分は同一方向の出力変化として現れるため、両センサの出力の絶対値の差が変化する。
【0051】
したがって、センサ出力が変化し、両センサの出力の絶対値に差があるときは、異常が発生していると判断される。
【0052】
より詳しく、ステップで示すと、まず、ステップS1とS2で、メインセンサ出力値Vm(n)と、サブセンサ出力値Vs(n)とを読込み、また前回の各出力値Vm(n−1)とVs(n−1)とを読出す。
【0053】
そして、ステップS3で前回と今回とで各センサ出力値に変化があるか無いかを判断して、出力値に変化を生じたときは、ステップS4で今回のVmとVsとの各絶対値に所定値α以上の差を生じたかどうか(換言すると差がゼロかどうか)を判断する。
【0054】
各センサ9A、9Bが正常に作動しているときは、センサストロークに応じて出力が変化し、かつ両センサの出力差もストロークに応じてリニヤに変化するが、例えば図3(b)のC部分の抵抗が故障により増加したときなど、図3(c)にも示すように、センサストロークが変化しなくても、メインセンサ出力は、抵抗増加に相当する電圧値だけ、A′→B′へと変化し、サブセンサ出力も同一電圧値だけ増加して、A″→C″へと変化する。
【0055】
これらはいずれも同一方向への電圧の増加として現れるので、通常のストローク時のように、両センサの出力の絶対値は一致せず、両者の差が生じる。したがって、ステップS5でこの出力の絶対値の差が所定値以上のまま、これがN回連続したときは、異常判定手段11bは、センサ二重化回路に異常が発生したと判断して、故障信号を故障検出部11Bへ出力する。
【0056】
このような回路の異常は、C部分以外の、D,E,F部分についても同様に検出することができ、また、当然のことながらメイントルクセンサ9Aとサブトルクセンサ9Bのいずれか一方に故障が生じて異常出力値を生じたときにも、両センサ出力の絶対値の差を判定することにより、その異常を的確に検出することができる。
【0057】
本発明の倍力操舵装置は、上記の実施形態に限定されず、特許請求の範囲に記載された範囲、実施形態の範囲で、種々の変形例、組み合わせが可能であり、これらの変形例、組み合わせもその権利範囲に含むものである。
【産業上の利用可能性】
【0058】
本発明の倍力操舵装置は、一般の故障原因については一般のフェールセーフ制御を達成しながら、故障原因が重大なものでなく、操舵補助を解除すると、むしろ、車両の操舵復帰力がハンドルを通して運転者に違和感、あるいは、操舵性の変化を感じさせてしまうのを回避可能とすることが要請される産業分野に用いることができる。
【図面の簡単な説明】
【0059】
【図1】(a)は、本発明の、フェールセーフ機構を備えた倍力操舵装置の一例を示す図、(b)は(a)の制御機構を示すブロック図
【図2】図1のフェールセーフ機構が用いる故障原因毎の危険度テーブルを例示するもので、(a)は一般の故障原因に用いる危険度テーブルを示す図、(b)は特定故障原因の一例の場合に用いる危険度テーブルを示す図、(c)は特定故障原因の他例の場合に用いる危険度テーブルを示す図
【図3】特定故障原因のメインサブ差を判定する具体的な構成の一例を示すもので、(a)はそのブロック図、(b)はその回路図、(c)は(b)の両センサの出力特性図
【符号の説明】
【0060】
1 操舵輪(ハンドル)
2 操舵軸
3 出力軸
4 入力軸
5 ピニオン
6 ラック
7 操舵ラック軸
8 操舵補助駆動手段(電動モータ、流体圧駆動手段)
9 トルクセンサ
9A メイントルクセンサ
9B サブトルクセンサ
10 車速センサ
11 フェールセーフ機構
11A 制御部
11B 故障検出部
11a 電圧印加手段
11b 異常判定手段
12 リレー
13 電源(バッテリー)
20 倍力操舵装置
H メインサブ差故障検出回路
【特許請求の範囲】
【請求項1】
フェールセーフ機構を備えた倍力操舵装置であって、
前記フェールセーフ機構は、前記倍力操舵装置の制御機構を複数の故障原因について併行して監視しながら、運転者の操舵力が小さいほど操舵補助の解除をより早く行うように危険度を大きく設定し、かつ、車速が大きくなるほどより小さい操舵力に対して操舵補助の解除を行うように危険度を大きく設定する危険度テーブルを個々の故障原因に対応して用い、
前記複数の故障原因の内、故障原因が直接操舵補助の解除とならず、操舵補助を解除すると車両の操舵復帰力が運転者の操舵性に影響を与える特定故障原因の場合には、その特定故障原因の危険度テーブルの危険度をより緩和するようにしたことを特徴とする倍力操舵装置。
【請求項2】
フェールセーフ機構は、運転者の操舵力を検出するメイントルクセンサと、前記メイントルクセンサと併行代替可能に設けられ、同様に運転者の操舵力を検出するサブトルクセンサとを備え、特定故障原因が、前記メイントルクセンサとサブトルクセンサとがそれぞれ検出する操舵力の差であることを特徴とする請求項1記載の倍力操舵装置。
【請求項3】
特定故障原因が、操舵補助の駆動力を与える電源を操舵補助駆動手段に断接するリレー接点電圧であることを特徴とする請求項1または2記載の倍力操舵装置。
【請求項1】
フェールセーフ機構を備えた倍力操舵装置であって、
前記フェールセーフ機構は、前記倍力操舵装置の制御機構を複数の故障原因について併行して監視しながら、運転者の操舵力が小さいほど操舵補助の解除をより早く行うように危険度を大きく設定し、かつ、車速が大きくなるほどより小さい操舵力に対して操舵補助の解除を行うように危険度を大きく設定する危険度テーブルを個々の故障原因に対応して用い、
前記複数の故障原因の内、故障原因が直接操舵補助の解除とならず、操舵補助を解除すると車両の操舵復帰力が運転者の操舵性に影響を与える特定故障原因の場合には、その特定故障原因の危険度テーブルの危険度をより緩和するようにしたことを特徴とする倍力操舵装置。
【請求項2】
フェールセーフ機構は、運転者の操舵力を検出するメイントルクセンサと、前記メイントルクセンサと併行代替可能に設けられ、同様に運転者の操舵力を検出するサブトルクセンサとを備え、特定故障原因が、前記メイントルクセンサとサブトルクセンサとがそれぞれ検出する操舵力の差であることを特徴とする請求項1記載の倍力操舵装置。
【請求項3】
特定故障原因が、操舵補助の駆動力を与える電源を操舵補助駆動手段に断接するリレー接点電圧であることを特徴とする請求項1または2記載の倍力操舵装置。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2009−184489(P2009−184489A)
【公開日】平成21年8月20日(2009.8.20)
【国際特許分類】
【出願番号】特願2008−26105(P2008−26105)
【出願日】平成20年2月6日(2008.2.6)
【出願人】(000000929)カヤバ工業株式会社 (2,151)
【Fターム(参考)】
【公開日】平成21年8月20日(2009.8.20)
【国際特許分類】
【出願日】平成20年2月6日(2008.2.6)
【出願人】(000000929)カヤバ工業株式会社 (2,151)
【Fターム(参考)】
[ Back to top ]