
光位相差検出式の侵入物検知センサ
【課題】検知領域内に様々な距離が存在するような場合でも、正確に侵入物の有無を検知することができる光位相差検出式の侵入物検知センサを提供する。
【解決手段】第1〜第nの検知小領域DA1〜に夫々向かう第1〜第nの検出光DL1〜を、第1周期毎の第1〜第nの投光信号51〜に基づいて夫々投光する投光部33a〜,36と、検出光DL1〜の検知小領域DA1〜からの第1〜第nの反射光R1〜を夫々受光し、第1〜第nの受光信号71〜を夫々生成する受光部35a〜,37と、第1周期の自然数倍からなる第2周期毎に、投光信号51〜と受光信号71〜との第1〜第nの位相差PA1〜を夫々測定する位相差測定手段15,16,18bと、第1〜第nの位相差参照値PR1〜を夫々予め記憶した位相差参照値記憶手段18dと、位相差PA1〜と位相差参照値PR1〜との各差の何れかが所定範囲外にある場合、検知領域DA内に侵入物が有ると判定する判定手段18eと、を含む侵入物検知センサ1とした。
【解決手段】第1〜第nの検知小領域DA1〜に夫々向かう第1〜第nの検出光DL1〜を、第1周期毎の第1〜第nの投光信号51〜に基づいて夫々投光する投光部33a〜,36と、検出光DL1〜の検知小領域DA1〜からの第1〜第nの反射光R1〜を夫々受光し、第1〜第nの受光信号71〜を夫々生成する受光部35a〜,37と、第1周期の自然数倍からなる第2周期毎に、投光信号51〜と受光信号71〜との第1〜第nの位相差PA1〜を夫々測定する位相差測定手段15,16,18bと、第1〜第nの位相差参照値PR1〜を夫々予め記憶した位相差参照値記憶手段18dと、位相差PA1〜と位相差参照値PR1〜との各差の何れかが所定範囲外にある場合、検知領域DA内に侵入物が有ると判定する判定手段18eと、を含む侵入物検知センサ1とした。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、検知領域への侵入物の有無を検知する光位相差検出式の侵入物検知センサに関する。
【背景技術】
【0002】
領域内への人体や車両などの侵入物の有無を検知するセンサとしては、超音波を利用して反射波の時間を測定する超音波式センサ、光を利用した三角測量式センサ、光の反射光量を測定する光量検出式センサおよび光位相差検出式センサなどが挙げられる。
【0003】
超音波式センサでは、被検知体の角度変化による影響が大きいといった問題や、周囲の温度変化や風の影響に弱いといった問題がある。
【0004】
光量検出式センサでは、反射光量を検出するため、被検知体の色の変化に弱いという問題がある。
【0005】
三角測量式センサでは、正確に測定するために光のビーム径を小さく絞る必要があり、精密な光学系が必要となる。また、検知領域が小さいため、被検知体の角度や凸凹の影響を受け易い。
【0006】
光位相差検出式センサ(例えば、特許文献1参照)は、投光波と受光波の位相差を検出して被検知体までの距離を測定し、測定距離の変化をとらえることによって侵入物の有無を検知している。これは、上記位相差が被検知体との距離に比例することを利用したものである。それゆえ、光位相差検出式センサは、原理的に温度等の影響に強く、被検知体の色の変化にも強い。
【特許文献1】特開2005−325537号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
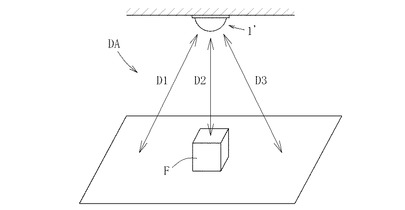
ところで、光位相差検出式センサを用いて比較的広範な検知領域内への侵入物の有無を検知しようとする場合、例えば図11に示す如く、検知領域DA内に様々な距離D1〜D3が存在し得る(図11中のFは固定物)。この場合、侵入物検知センサ1’は距離D1〜D3の合成距離を検出することになるため、測定精度が悪化していた。
【0008】
本発明は上記事情に鑑みてなされたものであり、その目的とするところは、検知領域内に様々な距離が存在するような場合でも、正確に侵入物の有無を検知することができる光位相差検出式の侵入物検知センサを提供することにある。
【課題を解決するための手段】
【0009】
上記課題を解決するために本発明は、(1)検知領域への侵入物の有無を検知するセンサであって、前記検知領域をn個に分割してなる第1〜第nの検知小領域にそれぞれ向かう第1〜第nの検出光を、当該各検出光のためにそれぞれ生成される第1周期ごとの第1〜第nの投光信号に基づいてそれぞれ投光する投光部と、前記第1〜第nの検出光の前記第1〜第nの検知小領域からの第1〜第nの反射光をそれぞれ受光し、第1〜第nの受光信号をそれぞれ生成する受光部と、前記第1周期の自然数倍からなる第2周期ごとに、前記第1〜第nの投光信号と前記第1〜第nの受光信号との第1〜第nの位相差をそれぞれ測定する位相差測定手段と、前記検知領域内に侵入物が無い場合に前記位相差測定手段によって測定されるべき前記第1〜第nの位相差を、第1〜第nの位相差参照値としてそれぞれ予め記憶した位相差参照値記憶手段と、前記位相差測定手段によって測定された前記第1〜第nの位相差と、前記位相差参照値記憶手段に記憶された前記第1〜第nの位相差参照値との各差のいずれかが所定範囲外にある場合、前記検知領域内に侵入物が有ると判定する判定手段と、を含んでなることを特徴とする光位相差検出式の侵入物検知センサを提供するものである。
【0010】
また本発明は、上記構成において、(2)前記投光部は、第1〜第nの投光素子と、当該第1〜第nの投光素子の投光側に配置された投光レンズとを含み、前記第1〜第nの投光素子は、前記第1〜第nの検出光を前記投光レンズに向けてそれぞれ投光し、前記投光レンズは、前記第1〜第nの投光素子による前記第1〜第nの検出光を受けて、当該第1〜第nの検出光を前記第1〜第nの検知小領域にそれぞれ向かわせるようになっていることを特徴とする光位相差検出式の侵入物検知センサを提供するものである。
【0011】
また本発明は、上記構成のいずれかにおいて、(3)前記受光部は、第1〜第nの受光素子と、当該第1〜第nの受光素子の受光側に配置された受光レンズとを含み、前記受光レンズは、前記第1〜第nの反射光を受けて、当該第1〜第nの反射光を前記第1〜第nの受光素子にそれぞれ向かわせるようになっており、前記第1〜第nの受光素子は、前記受光レンズからの前記第1〜第nの検出光をそれぞれ受光し、前記第1〜第nの受光信号をそれぞれ生成することを特徴とする光位相差検出式の侵入物検知センサを提供するものである。
【0012】
また本発明は、(4)検知領域への侵入物の有無を検知するセンサであって、前記検知領域に向かう検出光を、当該検出光のために生成される第1周期ごとの投光信号に基づいて投光する投光部と、前記検出光の前記検知領域をn個に分割してなる第1〜第nの検知小領域からの第1〜第nの反射光をそれぞれ受光し、第1〜第nの受光信号をそれぞれ生成する受光部と、前記第1周期の自然数倍からなる第2周期ごとに、前記投光信号と前記第1〜第nの受光信号との第1〜第nの位相差をそれぞれ測定する位相差測定手段と、前記検知領域内に侵入物が無い場合に前記位相差測定手段によって測定されるべき前記第1〜第nの位相差を、第1〜第nの位相差参照値としてそれぞれ予め記憶した位相差参照値記憶手段と、前記位相差測定手段によって測定された前記第1〜第nの位相差と、前記位相差参照値記憶手段に記憶された前記第1〜第nの位相差参照値との各差のいずれかが所定範囲外にある場合、前記検知領域内に侵入物が有ると判定する判定手段と、を含んでなることを特徴とする光位相差検出式の侵入物検知センサを提供するものである。
【0013】
また本発明は、上記構成(4)において、(5)前記投光部は、第1〜第nの投光素子と、当該第1〜第nの投光素子の投光側に配置された投光レンズとを含み、前記第1〜第nの投光素子は、前記検出光を前記投光レンズに向けて投光し、前記投光レンズは、前記第1〜第nの投光素子による前記検出光を受けて、当該検出光を前記検知領域に向かわせるようになっていることを特徴とする光位相差検出式の侵入物検知センサを提供するものである。
【0014】
また本発明は、上記構成(4)または(5)において、(6)前記受光部は、第1〜第nの受光素子と、当該第1〜第nの受光素子の受光側に配置された受光レンズとを含み、前記受光レンズは、前記第1〜第nの反射光を受けて、当該第1〜第nの反射光を前記第1〜第nの受光素子にそれぞれ向かわせるようになっており、前記第1〜第nの受光素子は、前記受光レンズからの前記第1〜第nの反射光をそれぞれ受光し、前記第1〜第nの受光信号をそれぞれ生成することを特徴とする光位相差検出式の侵入物検知センサを提供するものである。
【発明の効果】
【0015】
上記のように構成された本発明の侵入物検知センサによれば、検知領域を分割してなるn個の検知小領域ごとに、位相差が測定される。つまり、例えば図11に示す如く検知領域DA内に様々な距離D1〜D3が存在する場合であっても、それらの合成距離が検出されるのではなく、各距離D1〜D3がそれぞれ検出され得る。それゆえ、本発明の侵入物検知センサによれば、検知領域内に様々な距離が存在する場合であっても、侵入物の有無を精度良く検知することができる。
【発明を実施するための最良の形態】
【0016】
以下、図面を参照して本発明の好ましい一実施形態につき説明する。
図1は本発明にかかる光位相差検出式の侵入物検知センサの一例を示す側面図、図2は図1の侵入物検知センサの本体部を示す側断面図である。図3は図1の侵入物検知センサにおける光学素子および光学レンズの配置を示す底面図であり、図4は図1の侵入物検知センサからの検出光およびその反射光を示す概略斜視図である。図5は図1の侵入物検知センサの回路構成を説明するためのブロック図であり、図6は図1の侵入物検知センサにおいて生成される投光信号のタイムチャートである。図7は図1の侵入物検知センサにおいて生成される位相差信号を示すための図である。
【0017】
[全体構成]
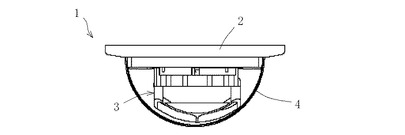
図1に示すように、本実施形態にかかる光位相差検出式の侵入物検知センサ1は、侵入物の有無を検知すべき領域の一端に取り付けられるベース部2と、ベース部2に取り付けられた本体部3と、本体部3を覆う透光性のカバー4と、から構成されている。
【0018】
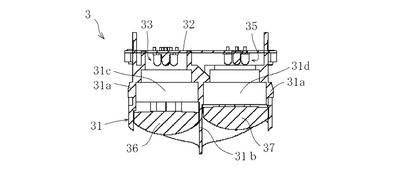
本体部3は主に、図2に示す如く、フレーム31と、フレーム31の一方側に取り付けられた基板32と、基板32の回路上に接続された投光素子群33および受光素子群35と、フレーム31の他方側に保持された投光レンズ36および受光レンズ37と、からなっている。
【0019】
フレーム31は、周壁31aと中央壁31bとを有している。周壁31aおよび中央壁31bは、投光素子群33が配置される投光室31cと、受光素子群35が配置される受光室31dとを形成する。
【0020】
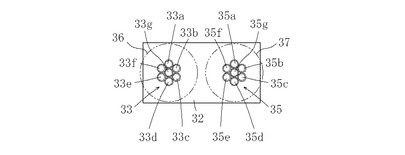
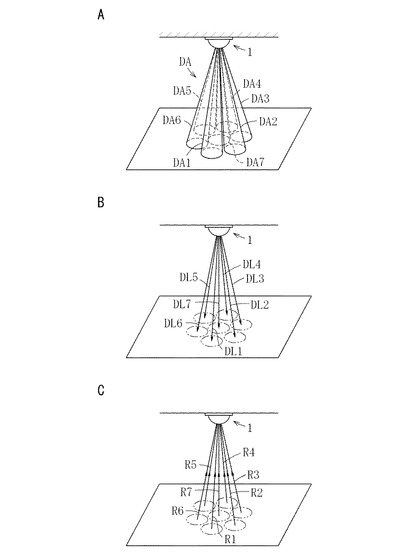
基板32は、投光室31cおよび受光室31dの一方側(図2では上側)を閉じるように配置される。基板32の回路上には、投光素子群33が、投光室31c内に収容されるように接続される。投光素子群33は、図3に示す如く、投光素子33g(第7の投光素子)を中心にしてその周囲に配置された6つの投光素子33a〜33f(第1〜第6の投光素子)によって構成されている。投光素子33a〜33gは、図4に示す如く、投光レンズ36を介して、検知領域DAを7個に分割してなる検知小領域DA1〜DA7(第1〜第7の検知小領域)に向かう検出光DL1〜DL7(第1〜第7の検出光)をそれぞれ投光する。
【0021】
また、基板32の回路上には、受光素子群35が、受光室31d内に収容されるように接続される。受光素子群35は、図3に示す如く、投光素子33a〜33gにそれぞれ対応するように、受光素子35g(第7の受光素子)を中心にしてその周囲に配置された6つの受光素子35a〜35f(第1〜第6の受光素子)によって構成されている。受光素子35a〜35gは、図4に示す如く、投光素子33a〜33gから投光された各検出光DL1〜DL7の、各検知小領域DA1〜DA7からの各反射光R1〜R7(第1〜第7の反射光)をそれぞれ受光し、それらに応じて後述する受光信号71〜77(第1〜第7の受光信号)をそれぞれ生成する。
【0022】
投光レンズ36は、投光室31cの他方側(図2では下側)を閉じるように配置される。投光レンズ36は、投光素子33a〜33gから投光された光を受けて、各検知小領域DA1〜DA7に向かう検出光DL1〜DL7を生成するように構成されている。
【0023】
受光レンズ37は、受光室31dの他方側(図2では下側)を閉じるように配置される。受光レンズ37は、検出光DL1〜DL7の各検知小領域DA1〜DA7からの各反射光R1〜R7を、受光素子35a〜35gにそれぞれ向かわせるように構成されている。
【0024】
[回路構成]
次に、各投光信号を生成すると共に受光信号を処理して、検知領域への侵入物の有無を検知するための検知回路の構成について説明する。なお、図1〜図3には図示されていないが、検知回路は基板32上に構成されている。
【0025】
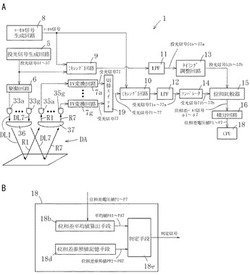
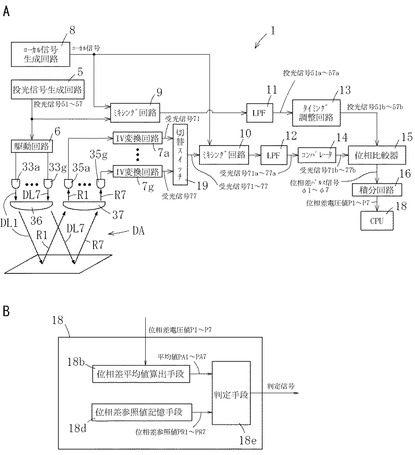
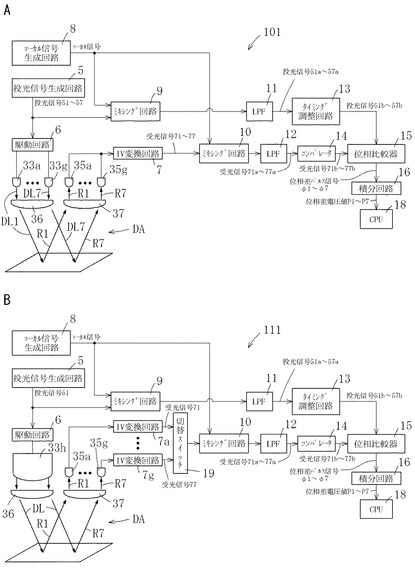
検知回路は、図5に示す如く、投光素子33a〜33gに検出光DL1〜DL7を投光させるための投光信号51〜57(第1〜第7の投光信号)を生成する投光信号生成回路5と、投光信号生成回路5によって生成された投光信号51〜57に基づいて、投光素子33a〜33gに検出光DL1〜DL7を投光させる駆動回路6と、を有している。
【0026】
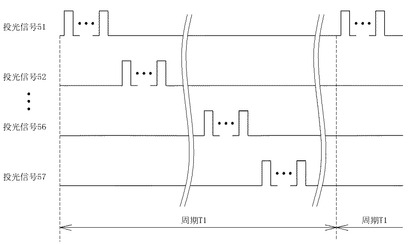
投光信号生成回路5は、図6に示す如く、周期T1(第1周期)ごとに、投光素子33a〜33gに対する所定数の投光パルスを含む投光信号51〜57をそれぞれ生成する。投光信号51〜57は、タイミングがそれぞれ重ならないように順次生成される。駆動回路6は、投光信号51〜57に基づいて周期T1ごとに、各投光素子33a〜33gに検出光DL1〜DL7をそれぞれ所定数回投光させる。
【0027】
また、検知回路は、図5に示す如く、受光素子35a〜35gが検出光DL1〜DL7の反射光R1〜R7を受けて生成した受光信号71〜77を電圧による信号に変換し、増幅するIV変換回路7a〜7gを有している。
【0028】
また、検知回路は、IV変換回路7a〜7gによって変換された後の受光信号71〜77を受けるとともに、ミキシング回路10へ送る受光信号を順次切り替える切替スイッチ19を有している。切替スイッチ19は、そのときの反射光に対応する受光信号(例えば、投光素子33aによる検出光DL1の反射光R1が発生している場合であれば受光素子35aによる受光信号71)のみを、ミキシング回路10に送るようになっている。切替スイッチ19における上記切替えのタイミングは、投光信号51〜57の生成タイミングに基づいて予め設定されている。
【0029】
また、検知回路は、ビートダウンを行うべく、ローカル信号を生成するローカル信号生成回路8と、各投光信号51〜57をローカル信号とミキシングするミキシング回路9と、IV変換後の受光信号71〜77をローカル信号とミキシングするミキシング回路10と、を有している。また、検知回路は、ミキシング回路9によって得られた信号の低周波数成分を通過させるローパスフィルタ(LPF)11と、ミキシング回路10によって得られた信号の低周波数成分を通過させるローパスフィルタ(LPF)12と、を有している。
【0030】
また、検知回路は、LPF11を通過した投光信号51a〜57aのタイミングを調整するタイミング調整回路13と、LPF12を通過した受光信号71a〜77aを矩形波にするコンパレータ14とを有している。
【0031】
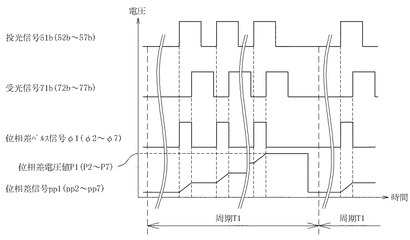
ローカル信号生成回路8は、投光信号51〜57よりも少し短い周期(換言すれば投光信号51〜57の周波数よりも少し高い周波数)のローカル信号(不図示)を生成する。各投光信号51〜57は、ミキシング回路9によってローカル信号とミキシングされたのち、LPF11を通過することで、投光信号51a〜57aとされる。投光信号51a〜57aはさらに、タイミング調整回路13を通過することで、図7に示す投光信号51b〜57bとされる。同様に、IV変換後の受光信号71〜77は、ミキシング回路10によってローカル信号とミキシングされたのち、LPF12を通過することで、受光信号71a〜77aとされる。受光信号71a〜77aはさらに、コンパレータ14を通過することで、図7に示す受光信号71b〜77bとされる。
【0032】
また、検知回路は、投光信号51b〜57bと受光信号71b〜77bとをそれぞれ比較し、それらの位相差に関する位相差パルス信号φ1〜φ7を得る位相比較器15と、位相比較器15からの位相差パルス信号φ1〜φ7を積分して位相差信号pp1〜pp7および位相差電圧値P1〜P7を得る積分回路16とを有している。
【0033】
位相比較器15は、図7に示す如く、投光信号51b〜57bと受光信号71b〜77bとをそれぞれ比較し、各位相差に関する位相差パルス信号φ1〜φ7を周期T1ごとに生成する。
【0034】
積分回路16は、図7に示す如く、周期T1ごとに、位相差パルス信号φ1〜φ7を積分して位相差信号pp1〜pp7をそれぞれ生成し、各位相差信号pp1〜pp7の最大電圧値である位相差電圧値P1〜P7をそれぞれ得る。
【0035】
検知回路はさらに、積分回路16からの位相差電圧値P1〜P7が入力されるCPU18を有している。CPU18は、図5Bに示す如く、各位相差電圧値P1〜P7に基づいて、投光信号51b〜57bと受光信号71b〜77bとの位相差に関する平均値PA1〜PA7(第1〜第7の位相差)をそれぞれ算出する位相差平均値算出手段18bを有している(なお、この位相差平均値算出手段18bと、位相比較器15と、積分回路16とが、特許請求の範囲における「位相差測定手段」に該当する)。
【0036】
位相差平均値算出手段18bは、周期T1の自然数倍からなる周期T2(第2周期)ごとに、位相差電圧値P1〜P7の平均値PA1〜PA7をそれぞれ算出する。
【0037】
CPU18はさらに、検知領域(全検知小領域)内に侵入物が無い場合に位相差平均値算出手段18bによって算出されるはずの上記平均値PA1〜PA7を、位相差参照値PR1〜PR7(第1〜第7の位相差参照値)として予め記憶した位相差参照値記憶手段18dを有している。
【0038】
また、CPU18は、位相差参照値記憶手段18dに記憶された位相差参照値PR1〜PR7と、位相差平均値算出手段18bによって算出された平均値PA1〜PA7とに基づいて、検知領域内における侵入物の有無を判定し、判定信号を出力する判定手段18eを有している。
【0039】
判定手段18eは、位相差平均値算出手段18bによって算出された位相差に関する平均値PA1〜PA7と位相差参照値PR1〜PR7との差PA1−PR1,PA2−PR2,・・・,PA7−PR7のいずれかが所定範囲外にある場合、検知領域内に侵入物が有ると判定する。反対に、位相差に関する平均値PA1〜PA7と位相差参照値PR1〜PR7との差PA1−PR1,PA2−PR2,・・・,PA7−PR7のいずれもが所定範囲内である場合、判定手段18eは検知領域内に侵入物は無いと判定する。
【0040】
[動作]
以上のように構成された侵入物検知センサ1は、次のように動作する。
まず、投光信号生成回路5によって投光信号51が生成される。この投光信号51に基づいて、駆動回路6が投光素子33aに検出光DL1を投光させる。投光素子33aからの検出光DL1は、投光レンズ36を通過することによって、検知小領域DA1に向かう。
【0041】
検知小領域DA1からの反射光R1は、受光レンズ37に入射する。反射光R1は、受光レンズ37を通過することによって、受光素子35aに向かう。受光素子35aは、反射光R1を受光し、受光信号71を生成する。
【0042】
受光信号71は、IV変換回路7aによって、電圧による信号に変換される。変換された後の受光信号71は、切替スイッチ19に入力される。切替スイッチ19は、そのときの反射光に対応する受光信号のみを、ミキシング回路10に送る。つまり、この段階では、投光素子33aによる検出光DL1の反射光R1が発生しているので、切替スイッチ19は、受光素子35aによる受光信号71のみをミキシング回路10に送る。
【0043】
ミキシング回路10は、切替スイッチ19からの受光信号71を、ローカル信号生成回路8によって生成されたローカル信号とミキシングする。ローカル信号とミキシングされた受光信号71は、LPF12およびコンパレータ14を通過することで、受光信号71bとされる。受光信号71bは、位相比較器15に入力される。
【0044】
一方、投光信号51は、ミキシング回路9において、ローカル信号生成回路8によって生成された上記ローカル信号とミキシングされる。ローカル信号とミキシングされた投光信号51は、LPF11およびタイミング調整回路13を通過することで、投光信号51bとされる。投光信号51bは位相比較器15に入力される。
【0045】
位相比較器15は、投光信号51bと受光信号71bとを比較し、位相差に関する位相差パルス信号φ1を生成する。位相差パルス信号φ1は、積分回路16に入力される。
【0046】
積分回路16は、位相差パルス信号φ1を積分して位相差信号pp1を生成し、位相差電圧値P1を得る。位相差電圧値P1は、CPU18内の位相差平均値算出手段18bに入力される。
【0047】
周期T1内において、以上の動作が投光信号52〜57に対してそれぞれ行なわれ、位相差電圧値P2〜P7がCPU18内の位相差平均値算出手段18bにそれぞれ入力される。入力された位相差電圧値P1〜P7は、位相差平均値算出手段18bによってそれぞれ独立して保持される。
【0048】
そして、位相差平均値算出手段18bは、周期T1ごとに入力された位相差電圧値P1〜P7につき、周期T1の自然数倍からなる周期T2における平均値PA1〜PA7をそれぞれ算出する。各平均値PA1〜PA7は、判定手段18eに入力される。
【0049】
判定手段18eは、入力された位相差に関する平均値PA1〜PA7と、位相差参照値記憶手段18dに記憶された位相差参照値PR1〜PR7との差PA1−PR1,PA2−PR2,・・・,PA7−PR7を算出する。算出された差PA1−PR1,PA2−PR2,・・・,PA7−PR7のいずれかが所定範囲外にある場合、判定手段18eは検知領域内に侵入物が有ると判定し、その旨の判定信号を出力する。反対に、算出された差PA1−PR1,PA2−PR2,・・・,PA7−PR7のいずれもが所定範囲内である場合、判定手段18eは検知領域内に侵入物は無いと判定する。
【0050】
以上の動作が繰り返され、周期T2ごとに検知領域内の侵入物の有無が判定される。
【0051】
[作用・効果]
以上のように構成された侵入物検知センサ1によれば、検知領域DAを7個に分割してなる検知小領域DA1〜DA7ごとに、位相差が測定される。つまり、例えば図11に示す如く検知領域DA内に様々な距離D1〜D3が存在する場合であっても、それらの合成距離が検出されるのではなく、各距離D1〜D3がそれぞれ検出され得る。それゆえ、侵入物検知センサ1によれば、検知領域DA内に様々な距離D1〜D3が存在する場合であっても、侵入物の有無を精度良く検知することができる。
【0052】
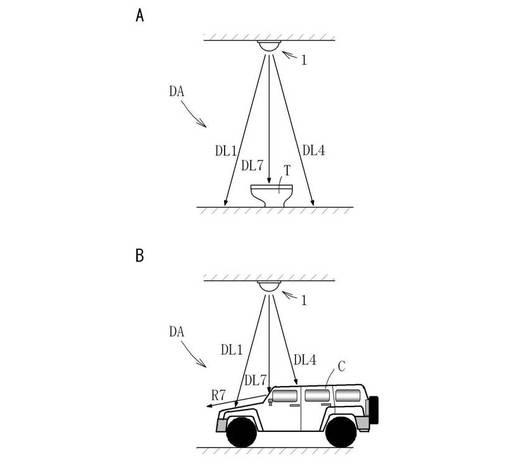
したがって、侵入物検知センサ1によれば、例えば図8Aに示す如く検知領域DA内にトイレ(固定物)Tが存在する場合であっても、精度良く侵入物検知をすることができ、例えばトイレTよりも低い位置に人が倒れているような場合であっても、検出光DL1,DL4によってそれを正確に検知することができる。
【0053】
また、侵入物検知センサ1によれば、例えば図8Bに示す如く検知領域DA内に車両Cが侵入し、フロントガラスGの傾斜によって検出光DL7の反射光R7を受光できない場合であっても、検出光DL1,DL4によって車両Cの侵入を検知することができる。
【0054】
また、侵入物検知センサ1によれば、各検知小領域DA1〜DA7に向かう検出光DL1〜DL7は、複数の投光素子33a〜33gに対して投光レンズ36を配置することによって生成されている。それゆえ、侵入物検知センサ1は、可動機構等の複雑な機構を要することなく、シンプルかつ低コストに構成され得る。
【0055】
[変形例]
以上、本発明の実施形態について具体的に説明したが、本発明は次のように変形して実施することができる。
【0056】
例えば、図9Aに示す如く、切替スイッチ19を省略することができる。この場合、複数の受光素子35a〜35gが1つの大きな受光素子として機能するかたちになる。この場合であっても、検出光DL1〜DL7を順次投光すれば対応する受光信号71〜77も順次生成されることになり、各受光信号71〜77はそれぞれ区別され得る。よって、切替スイッチ19を省略した侵入物検知センサ101でも、侵入物検知センサ1と同様に侵入物有無を正確に検知することができる。
【0057】
また、侵入物検知センサ1では受光素子を複数使用したが、単数であってもよい。受光素子が単数であっても、上述したように、検出光DL1〜DL7を順次投光すれば、受光信号71〜77も順次生成されることになり、各受光信号71〜77はそれぞれ区別され得るからである。
【0058】
また、侵入物検知センサ1では投光素子を複数使用したが、図9Bに示す如く1つの投光素子33hを使用して、検知領域DA全体に向かう1つの検出光DLを投光するようにしてもよい。ただしこの場合、各検知小領域DA1〜DA7に対して受光素子35a〜35gがそれぞれ設けられ、各受光素子35a〜35gは対応する検知小領域からの反射光のみを受光する。各受光素子35a〜35gによって生成された各受光信号71〜77はそれぞれ区別されて、投光信号との位相差がそれぞれ求められる。
【0059】
また、侵入物検知センサ1では複数の投光素子のうちの1個に対して1個の受光素子を対応させていたが、これに限定されるものではない。例えば、複数の投光素子のうちの1個に対して受光素子を複数個対応させてもよく、複数の受光素子のうちの1個に対して投光素子を複数個対応させてもよい。
【0060】
また、侵入物検知センサ1では、複数の検知小領域DA1〜DA7に向かう検出光DL1〜DL7を投光レンズ36によって生成したが、これに限定されない。例えば、投光レンズ36を用いずに複数の投光素子を使用し、各投光素子を各検知小領域に向くようにそれぞれ配置することによって、複数の検知小領域に向かう検出光をそれぞれ生成してもよい。
【0061】
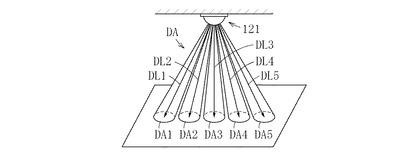
また、侵入物検知センサ1では検知小領域の数は7個であったが、これに限定されるものではなく、その数は適宜選択され得る。さらに、侵入物検知センサ1では、検知小領域DA7のまわりに検知小領域DA2〜DA7を配置していたが、これらの配置は用途に応じて任意に選択することができ、例えば図10に示す如く、検知小領域DA1〜DA5をライン状に配置することもできる。
【0062】
また、侵入物検知センサ1によれば、周期T1の自然数倍からなる周期T2ごとに位相差電圧値P1〜P7の平均値PA1〜PA7をそれぞれ算出し、この平均値を用いて侵入物有無を判定したが、平均値をとらずに電圧値P1〜P7を直接用いて侵入物有無を判定してもよい。
【図面の簡単な説明】
【0063】
【図1】本発明にかかる光位相差検出式の侵入物検知センサの一例を示す側面図である。
【図2】図1の侵入物検知センサの本体部を示す側断面図である。
【図3】図1の侵入物検知センサにおける光学素子および光学レンズの配置を示す底面図である。
【図4】図1の侵入物検知センサからの検出光およびその反射光を示す概略斜視図である。
【図5】図1の侵入物検知センサの回路構成を説明するためのブロック図である。
【図6】図1の侵入物検知センサにおいて生成される投光信号のタイムチャートである。
【図7】図1の侵入物検知センサにおいて生成される位相差信号を示すための図である。
【図8】図1の侵入物検知センサの効果を説明するための図である。
【図9】変形例にかかる光位相差検出式の侵入物検知センサの構成を説明するためのブロック図である。
【図10】変形例にかかる検知小領域を示す概略斜視図である。
【図11】従来の光位相差検出式の侵入物検知センサの欠点を説明するための図である。
【符号の説明】
【0064】
DA 検知領域
DL1〜DL7 検出光
PA1〜PA7 位相差
PR1〜PR7 位相差参照値
R1〜R7 反射光
1 侵入物検知センサ
18b 位相差平均値算出部
18d 位相差参照値記憶手段
18e 判定手段
33a〜33g 投光素子
35a〜35g 受光素子
36 投光レンズ
37 受光レンズ
51〜57 投光信号
71〜77 受光信号
【技術分野】
【0001】
本発明は、検知領域への侵入物の有無を検知する光位相差検出式の侵入物検知センサに関する。
【背景技術】
【0002】
領域内への人体や車両などの侵入物の有無を検知するセンサとしては、超音波を利用して反射波の時間を測定する超音波式センサ、光を利用した三角測量式センサ、光の反射光量を測定する光量検出式センサおよび光位相差検出式センサなどが挙げられる。
【0003】
超音波式センサでは、被検知体の角度変化による影響が大きいといった問題や、周囲の温度変化や風の影響に弱いといった問題がある。
【0004】
光量検出式センサでは、反射光量を検出するため、被検知体の色の変化に弱いという問題がある。
【0005】
三角測量式センサでは、正確に測定するために光のビーム径を小さく絞る必要があり、精密な光学系が必要となる。また、検知領域が小さいため、被検知体の角度や凸凹の影響を受け易い。
【0006】
光位相差検出式センサ(例えば、特許文献1参照)は、投光波と受光波の位相差を検出して被検知体までの距離を測定し、測定距離の変化をとらえることによって侵入物の有無を検知している。これは、上記位相差が被検知体との距離に比例することを利用したものである。それゆえ、光位相差検出式センサは、原理的に温度等の影響に強く、被検知体の色の変化にも強い。
【特許文献1】特開2005−325537号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
ところで、光位相差検出式センサを用いて比較的広範な検知領域内への侵入物の有無を検知しようとする場合、例えば図11に示す如く、検知領域DA内に様々な距離D1〜D3が存在し得る(図11中のFは固定物)。この場合、侵入物検知センサ1’は距離D1〜D3の合成距離を検出することになるため、測定精度が悪化していた。
【0008】
本発明は上記事情に鑑みてなされたものであり、その目的とするところは、検知領域内に様々な距離が存在するような場合でも、正確に侵入物の有無を検知することができる光位相差検出式の侵入物検知センサを提供することにある。
【課題を解決するための手段】
【0009】
上記課題を解決するために本発明は、(1)検知領域への侵入物の有無を検知するセンサであって、前記検知領域をn個に分割してなる第1〜第nの検知小領域にそれぞれ向かう第1〜第nの検出光を、当該各検出光のためにそれぞれ生成される第1周期ごとの第1〜第nの投光信号に基づいてそれぞれ投光する投光部と、前記第1〜第nの検出光の前記第1〜第nの検知小領域からの第1〜第nの反射光をそれぞれ受光し、第1〜第nの受光信号をそれぞれ生成する受光部と、前記第1周期の自然数倍からなる第2周期ごとに、前記第1〜第nの投光信号と前記第1〜第nの受光信号との第1〜第nの位相差をそれぞれ測定する位相差測定手段と、前記検知領域内に侵入物が無い場合に前記位相差測定手段によって測定されるべき前記第1〜第nの位相差を、第1〜第nの位相差参照値としてそれぞれ予め記憶した位相差参照値記憶手段と、前記位相差測定手段によって測定された前記第1〜第nの位相差と、前記位相差参照値記憶手段に記憶された前記第1〜第nの位相差参照値との各差のいずれかが所定範囲外にある場合、前記検知領域内に侵入物が有ると判定する判定手段と、を含んでなることを特徴とする光位相差検出式の侵入物検知センサを提供するものである。
【0010】
また本発明は、上記構成において、(2)前記投光部は、第1〜第nの投光素子と、当該第1〜第nの投光素子の投光側に配置された投光レンズとを含み、前記第1〜第nの投光素子は、前記第1〜第nの検出光を前記投光レンズに向けてそれぞれ投光し、前記投光レンズは、前記第1〜第nの投光素子による前記第1〜第nの検出光を受けて、当該第1〜第nの検出光を前記第1〜第nの検知小領域にそれぞれ向かわせるようになっていることを特徴とする光位相差検出式の侵入物検知センサを提供するものである。
【0011】
また本発明は、上記構成のいずれかにおいて、(3)前記受光部は、第1〜第nの受光素子と、当該第1〜第nの受光素子の受光側に配置された受光レンズとを含み、前記受光レンズは、前記第1〜第nの反射光を受けて、当該第1〜第nの反射光を前記第1〜第nの受光素子にそれぞれ向かわせるようになっており、前記第1〜第nの受光素子は、前記受光レンズからの前記第1〜第nの検出光をそれぞれ受光し、前記第1〜第nの受光信号をそれぞれ生成することを特徴とする光位相差検出式の侵入物検知センサを提供するものである。
【0012】
また本発明は、(4)検知領域への侵入物の有無を検知するセンサであって、前記検知領域に向かう検出光を、当該検出光のために生成される第1周期ごとの投光信号に基づいて投光する投光部と、前記検出光の前記検知領域をn個に分割してなる第1〜第nの検知小領域からの第1〜第nの反射光をそれぞれ受光し、第1〜第nの受光信号をそれぞれ生成する受光部と、前記第1周期の自然数倍からなる第2周期ごとに、前記投光信号と前記第1〜第nの受光信号との第1〜第nの位相差をそれぞれ測定する位相差測定手段と、前記検知領域内に侵入物が無い場合に前記位相差測定手段によって測定されるべき前記第1〜第nの位相差を、第1〜第nの位相差参照値としてそれぞれ予め記憶した位相差参照値記憶手段と、前記位相差測定手段によって測定された前記第1〜第nの位相差と、前記位相差参照値記憶手段に記憶された前記第1〜第nの位相差参照値との各差のいずれかが所定範囲外にある場合、前記検知領域内に侵入物が有ると判定する判定手段と、を含んでなることを特徴とする光位相差検出式の侵入物検知センサを提供するものである。
【0013】
また本発明は、上記構成(4)において、(5)前記投光部は、第1〜第nの投光素子と、当該第1〜第nの投光素子の投光側に配置された投光レンズとを含み、前記第1〜第nの投光素子は、前記検出光を前記投光レンズに向けて投光し、前記投光レンズは、前記第1〜第nの投光素子による前記検出光を受けて、当該検出光を前記検知領域に向かわせるようになっていることを特徴とする光位相差検出式の侵入物検知センサを提供するものである。
【0014】
また本発明は、上記構成(4)または(5)において、(6)前記受光部は、第1〜第nの受光素子と、当該第1〜第nの受光素子の受光側に配置された受光レンズとを含み、前記受光レンズは、前記第1〜第nの反射光を受けて、当該第1〜第nの反射光を前記第1〜第nの受光素子にそれぞれ向かわせるようになっており、前記第1〜第nの受光素子は、前記受光レンズからの前記第1〜第nの反射光をそれぞれ受光し、前記第1〜第nの受光信号をそれぞれ生成することを特徴とする光位相差検出式の侵入物検知センサを提供するものである。
【発明の効果】
【0015】
上記のように構成された本発明の侵入物検知センサによれば、検知領域を分割してなるn個の検知小領域ごとに、位相差が測定される。つまり、例えば図11に示す如く検知領域DA内に様々な距離D1〜D3が存在する場合であっても、それらの合成距離が検出されるのではなく、各距離D1〜D3がそれぞれ検出され得る。それゆえ、本発明の侵入物検知センサによれば、検知領域内に様々な距離が存在する場合であっても、侵入物の有無を精度良く検知することができる。
【発明を実施するための最良の形態】
【0016】
以下、図面を参照して本発明の好ましい一実施形態につき説明する。
図1は本発明にかかる光位相差検出式の侵入物検知センサの一例を示す側面図、図2は図1の侵入物検知センサの本体部を示す側断面図である。図3は図1の侵入物検知センサにおける光学素子および光学レンズの配置を示す底面図であり、図4は図1の侵入物検知センサからの検出光およびその反射光を示す概略斜視図である。図5は図1の侵入物検知センサの回路構成を説明するためのブロック図であり、図6は図1の侵入物検知センサにおいて生成される投光信号のタイムチャートである。図7は図1の侵入物検知センサにおいて生成される位相差信号を示すための図である。
【0017】
[全体構成]
図1に示すように、本実施形態にかかる光位相差検出式の侵入物検知センサ1は、侵入物の有無を検知すべき領域の一端に取り付けられるベース部2と、ベース部2に取り付けられた本体部3と、本体部3を覆う透光性のカバー4と、から構成されている。
【0018】
本体部3は主に、図2に示す如く、フレーム31と、フレーム31の一方側に取り付けられた基板32と、基板32の回路上に接続された投光素子群33および受光素子群35と、フレーム31の他方側に保持された投光レンズ36および受光レンズ37と、からなっている。
【0019】
フレーム31は、周壁31aと中央壁31bとを有している。周壁31aおよび中央壁31bは、投光素子群33が配置される投光室31cと、受光素子群35が配置される受光室31dとを形成する。
【0020】
基板32は、投光室31cおよび受光室31dの一方側(図2では上側)を閉じるように配置される。基板32の回路上には、投光素子群33が、投光室31c内に収容されるように接続される。投光素子群33は、図3に示す如く、投光素子33g(第7の投光素子)を中心にしてその周囲に配置された6つの投光素子33a〜33f(第1〜第6の投光素子)によって構成されている。投光素子33a〜33gは、図4に示す如く、投光レンズ36を介して、検知領域DAを7個に分割してなる検知小領域DA1〜DA7(第1〜第7の検知小領域)に向かう検出光DL1〜DL7(第1〜第7の検出光)をそれぞれ投光する。
【0021】
また、基板32の回路上には、受光素子群35が、受光室31d内に収容されるように接続される。受光素子群35は、図3に示す如く、投光素子33a〜33gにそれぞれ対応するように、受光素子35g(第7の受光素子)を中心にしてその周囲に配置された6つの受光素子35a〜35f(第1〜第6の受光素子)によって構成されている。受光素子35a〜35gは、図4に示す如く、投光素子33a〜33gから投光された各検出光DL1〜DL7の、各検知小領域DA1〜DA7からの各反射光R1〜R7(第1〜第7の反射光)をそれぞれ受光し、それらに応じて後述する受光信号71〜77(第1〜第7の受光信号)をそれぞれ生成する。
【0022】
投光レンズ36は、投光室31cの他方側(図2では下側)を閉じるように配置される。投光レンズ36は、投光素子33a〜33gから投光された光を受けて、各検知小領域DA1〜DA7に向かう検出光DL1〜DL7を生成するように構成されている。
【0023】
受光レンズ37は、受光室31dの他方側(図2では下側)を閉じるように配置される。受光レンズ37は、検出光DL1〜DL7の各検知小領域DA1〜DA7からの各反射光R1〜R7を、受光素子35a〜35gにそれぞれ向かわせるように構成されている。
【0024】
[回路構成]
次に、各投光信号を生成すると共に受光信号を処理して、検知領域への侵入物の有無を検知するための検知回路の構成について説明する。なお、図1〜図3には図示されていないが、検知回路は基板32上に構成されている。
【0025】
検知回路は、図5に示す如く、投光素子33a〜33gに検出光DL1〜DL7を投光させるための投光信号51〜57(第1〜第7の投光信号)を生成する投光信号生成回路5と、投光信号生成回路5によって生成された投光信号51〜57に基づいて、投光素子33a〜33gに検出光DL1〜DL7を投光させる駆動回路6と、を有している。
【0026】
投光信号生成回路5は、図6に示す如く、周期T1(第1周期)ごとに、投光素子33a〜33gに対する所定数の投光パルスを含む投光信号51〜57をそれぞれ生成する。投光信号51〜57は、タイミングがそれぞれ重ならないように順次生成される。駆動回路6は、投光信号51〜57に基づいて周期T1ごとに、各投光素子33a〜33gに検出光DL1〜DL7をそれぞれ所定数回投光させる。
【0027】
また、検知回路は、図5に示す如く、受光素子35a〜35gが検出光DL1〜DL7の反射光R1〜R7を受けて生成した受光信号71〜77を電圧による信号に変換し、増幅するIV変換回路7a〜7gを有している。
【0028】
また、検知回路は、IV変換回路7a〜7gによって変換された後の受光信号71〜77を受けるとともに、ミキシング回路10へ送る受光信号を順次切り替える切替スイッチ19を有している。切替スイッチ19は、そのときの反射光に対応する受光信号(例えば、投光素子33aによる検出光DL1の反射光R1が発生している場合であれば受光素子35aによる受光信号71)のみを、ミキシング回路10に送るようになっている。切替スイッチ19における上記切替えのタイミングは、投光信号51〜57の生成タイミングに基づいて予め設定されている。
【0029】
また、検知回路は、ビートダウンを行うべく、ローカル信号を生成するローカル信号生成回路8と、各投光信号51〜57をローカル信号とミキシングするミキシング回路9と、IV変換後の受光信号71〜77をローカル信号とミキシングするミキシング回路10と、を有している。また、検知回路は、ミキシング回路9によって得られた信号の低周波数成分を通過させるローパスフィルタ(LPF)11と、ミキシング回路10によって得られた信号の低周波数成分を通過させるローパスフィルタ(LPF)12と、を有している。
【0030】
また、検知回路は、LPF11を通過した投光信号51a〜57aのタイミングを調整するタイミング調整回路13と、LPF12を通過した受光信号71a〜77aを矩形波にするコンパレータ14とを有している。
【0031】
ローカル信号生成回路8は、投光信号51〜57よりも少し短い周期(換言すれば投光信号51〜57の周波数よりも少し高い周波数)のローカル信号(不図示)を生成する。各投光信号51〜57は、ミキシング回路9によってローカル信号とミキシングされたのち、LPF11を通過することで、投光信号51a〜57aとされる。投光信号51a〜57aはさらに、タイミング調整回路13を通過することで、図7に示す投光信号51b〜57bとされる。同様に、IV変換後の受光信号71〜77は、ミキシング回路10によってローカル信号とミキシングされたのち、LPF12を通過することで、受光信号71a〜77aとされる。受光信号71a〜77aはさらに、コンパレータ14を通過することで、図7に示す受光信号71b〜77bとされる。
【0032】
また、検知回路は、投光信号51b〜57bと受光信号71b〜77bとをそれぞれ比較し、それらの位相差に関する位相差パルス信号φ1〜φ7を得る位相比較器15と、位相比較器15からの位相差パルス信号φ1〜φ7を積分して位相差信号pp1〜pp7および位相差電圧値P1〜P7を得る積分回路16とを有している。
【0033】
位相比較器15は、図7に示す如く、投光信号51b〜57bと受光信号71b〜77bとをそれぞれ比較し、各位相差に関する位相差パルス信号φ1〜φ7を周期T1ごとに生成する。
【0034】
積分回路16は、図7に示す如く、周期T1ごとに、位相差パルス信号φ1〜φ7を積分して位相差信号pp1〜pp7をそれぞれ生成し、各位相差信号pp1〜pp7の最大電圧値である位相差電圧値P1〜P7をそれぞれ得る。
【0035】
検知回路はさらに、積分回路16からの位相差電圧値P1〜P7が入力されるCPU18を有している。CPU18は、図5Bに示す如く、各位相差電圧値P1〜P7に基づいて、投光信号51b〜57bと受光信号71b〜77bとの位相差に関する平均値PA1〜PA7(第1〜第7の位相差)をそれぞれ算出する位相差平均値算出手段18bを有している(なお、この位相差平均値算出手段18bと、位相比較器15と、積分回路16とが、特許請求の範囲における「位相差測定手段」に該当する)。
【0036】
位相差平均値算出手段18bは、周期T1の自然数倍からなる周期T2(第2周期)ごとに、位相差電圧値P1〜P7の平均値PA1〜PA7をそれぞれ算出する。
【0037】
CPU18はさらに、検知領域(全検知小領域)内に侵入物が無い場合に位相差平均値算出手段18bによって算出されるはずの上記平均値PA1〜PA7を、位相差参照値PR1〜PR7(第1〜第7の位相差参照値)として予め記憶した位相差参照値記憶手段18dを有している。
【0038】
また、CPU18は、位相差参照値記憶手段18dに記憶された位相差参照値PR1〜PR7と、位相差平均値算出手段18bによって算出された平均値PA1〜PA7とに基づいて、検知領域内における侵入物の有無を判定し、判定信号を出力する判定手段18eを有している。
【0039】
判定手段18eは、位相差平均値算出手段18bによって算出された位相差に関する平均値PA1〜PA7と位相差参照値PR1〜PR7との差PA1−PR1,PA2−PR2,・・・,PA7−PR7のいずれかが所定範囲外にある場合、検知領域内に侵入物が有ると判定する。反対に、位相差に関する平均値PA1〜PA7と位相差参照値PR1〜PR7との差PA1−PR1,PA2−PR2,・・・,PA7−PR7のいずれもが所定範囲内である場合、判定手段18eは検知領域内に侵入物は無いと判定する。
【0040】
[動作]
以上のように構成された侵入物検知センサ1は、次のように動作する。
まず、投光信号生成回路5によって投光信号51が生成される。この投光信号51に基づいて、駆動回路6が投光素子33aに検出光DL1を投光させる。投光素子33aからの検出光DL1は、投光レンズ36を通過することによって、検知小領域DA1に向かう。
【0041】
検知小領域DA1からの反射光R1は、受光レンズ37に入射する。反射光R1は、受光レンズ37を通過することによって、受光素子35aに向かう。受光素子35aは、反射光R1を受光し、受光信号71を生成する。
【0042】
受光信号71は、IV変換回路7aによって、電圧による信号に変換される。変換された後の受光信号71は、切替スイッチ19に入力される。切替スイッチ19は、そのときの反射光に対応する受光信号のみを、ミキシング回路10に送る。つまり、この段階では、投光素子33aによる検出光DL1の反射光R1が発生しているので、切替スイッチ19は、受光素子35aによる受光信号71のみをミキシング回路10に送る。
【0043】
ミキシング回路10は、切替スイッチ19からの受光信号71を、ローカル信号生成回路8によって生成されたローカル信号とミキシングする。ローカル信号とミキシングされた受光信号71は、LPF12およびコンパレータ14を通過することで、受光信号71bとされる。受光信号71bは、位相比較器15に入力される。
【0044】
一方、投光信号51は、ミキシング回路9において、ローカル信号生成回路8によって生成された上記ローカル信号とミキシングされる。ローカル信号とミキシングされた投光信号51は、LPF11およびタイミング調整回路13を通過することで、投光信号51bとされる。投光信号51bは位相比較器15に入力される。
【0045】
位相比較器15は、投光信号51bと受光信号71bとを比較し、位相差に関する位相差パルス信号φ1を生成する。位相差パルス信号φ1は、積分回路16に入力される。
【0046】
積分回路16は、位相差パルス信号φ1を積分して位相差信号pp1を生成し、位相差電圧値P1を得る。位相差電圧値P1は、CPU18内の位相差平均値算出手段18bに入力される。
【0047】
周期T1内において、以上の動作が投光信号52〜57に対してそれぞれ行なわれ、位相差電圧値P2〜P7がCPU18内の位相差平均値算出手段18bにそれぞれ入力される。入力された位相差電圧値P1〜P7は、位相差平均値算出手段18bによってそれぞれ独立して保持される。
【0048】
そして、位相差平均値算出手段18bは、周期T1ごとに入力された位相差電圧値P1〜P7につき、周期T1の自然数倍からなる周期T2における平均値PA1〜PA7をそれぞれ算出する。各平均値PA1〜PA7は、判定手段18eに入力される。
【0049】
判定手段18eは、入力された位相差に関する平均値PA1〜PA7と、位相差参照値記憶手段18dに記憶された位相差参照値PR1〜PR7との差PA1−PR1,PA2−PR2,・・・,PA7−PR7を算出する。算出された差PA1−PR1,PA2−PR2,・・・,PA7−PR7のいずれかが所定範囲外にある場合、判定手段18eは検知領域内に侵入物が有ると判定し、その旨の判定信号を出力する。反対に、算出された差PA1−PR1,PA2−PR2,・・・,PA7−PR7のいずれもが所定範囲内である場合、判定手段18eは検知領域内に侵入物は無いと判定する。
【0050】
以上の動作が繰り返され、周期T2ごとに検知領域内の侵入物の有無が判定される。
【0051】
[作用・効果]
以上のように構成された侵入物検知センサ1によれば、検知領域DAを7個に分割してなる検知小領域DA1〜DA7ごとに、位相差が測定される。つまり、例えば図11に示す如く検知領域DA内に様々な距離D1〜D3が存在する場合であっても、それらの合成距離が検出されるのではなく、各距離D1〜D3がそれぞれ検出され得る。それゆえ、侵入物検知センサ1によれば、検知領域DA内に様々な距離D1〜D3が存在する場合であっても、侵入物の有無を精度良く検知することができる。
【0052】
したがって、侵入物検知センサ1によれば、例えば図8Aに示す如く検知領域DA内にトイレ(固定物)Tが存在する場合であっても、精度良く侵入物検知をすることができ、例えばトイレTよりも低い位置に人が倒れているような場合であっても、検出光DL1,DL4によってそれを正確に検知することができる。
【0053】
また、侵入物検知センサ1によれば、例えば図8Bに示す如く検知領域DA内に車両Cが侵入し、フロントガラスGの傾斜によって検出光DL7の反射光R7を受光できない場合であっても、検出光DL1,DL4によって車両Cの侵入を検知することができる。
【0054】
また、侵入物検知センサ1によれば、各検知小領域DA1〜DA7に向かう検出光DL1〜DL7は、複数の投光素子33a〜33gに対して投光レンズ36を配置することによって生成されている。それゆえ、侵入物検知センサ1は、可動機構等の複雑な機構を要することなく、シンプルかつ低コストに構成され得る。
【0055】
[変形例]
以上、本発明の実施形態について具体的に説明したが、本発明は次のように変形して実施することができる。
【0056】
例えば、図9Aに示す如く、切替スイッチ19を省略することができる。この場合、複数の受光素子35a〜35gが1つの大きな受光素子として機能するかたちになる。この場合であっても、検出光DL1〜DL7を順次投光すれば対応する受光信号71〜77も順次生成されることになり、各受光信号71〜77はそれぞれ区別され得る。よって、切替スイッチ19を省略した侵入物検知センサ101でも、侵入物検知センサ1と同様に侵入物有無を正確に検知することができる。
【0057】
また、侵入物検知センサ1では受光素子を複数使用したが、単数であってもよい。受光素子が単数であっても、上述したように、検出光DL1〜DL7を順次投光すれば、受光信号71〜77も順次生成されることになり、各受光信号71〜77はそれぞれ区別され得るからである。
【0058】
また、侵入物検知センサ1では投光素子を複数使用したが、図9Bに示す如く1つの投光素子33hを使用して、検知領域DA全体に向かう1つの検出光DLを投光するようにしてもよい。ただしこの場合、各検知小領域DA1〜DA7に対して受光素子35a〜35gがそれぞれ設けられ、各受光素子35a〜35gは対応する検知小領域からの反射光のみを受光する。各受光素子35a〜35gによって生成された各受光信号71〜77はそれぞれ区別されて、投光信号との位相差がそれぞれ求められる。
【0059】
また、侵入物検知センサ1では複数の投光素子のうちの1個に対して1個の受光素子を対応させていたが、これに限定されるものではない。例えば、複数の投光素子のうちの1個に対して受光素子を複数個対応させてもよく、複数の受光素子のうちの1個に対して投光素子を複数個対応させてもよい。
【0060】
また、侵入物検知センサ1では、複数の検知小領域DA1〜DA7に向かう検出光DL1〜DL7を投光レンズ36によって生成したが、これに限定されない。例えば、投光レンズ36を用いずに複数の投光素子を使用し、各投光素子を各検知小領域に向くようにそれぞれ配置することによって、複数の検知小領域に向かう検出光をそれぞれ生成してもよい。
【0061】
また、侵入物検知センサ1では検知小領域の数は7個であったが、これに限定されるものではなく、その数は適宜選択され得る。さらに、侵入物検知センサ1では、検知小領域DA7のまわりに検知小領域DA2〜DA7を配置していたが、これらの配置は用途に応じて任意に選択することができ、例えば図10に示す如く、検知小領域DA1〜DA5をライン状に配置することもできる。
【0062】
また、侵入物検知センサ1によれば、周期T1の自然数倍からなる周期T2ごとに位相差電圧値P1〜P7の平均値PA1〜PA7をそれぞれ算出し、この平均値を用いて侵入物有無を判定したが、平均値をとらずに電圧値P1〜P7を直接用いて侵入物有無を判定してもよい。
【図面の簡単な説明】
【0063】
【図1】本発明にかかる光位相差検出式の侵入物検知センサの一例を示す側面図である。
【図2】図1の侵入物検知センサの本体部を示す側断面図である。
【図3】図1の侵入物検知センサにおける光学素子および光学レンズの配置を示す底面図である。
【図4】図1の侵入物検知センサからの検出光およびその反射光を示す概略斜視図である。
【図5】図1の侵入物検知センサの回路構成を説明するためのブロック図である。
【図6】図1の侵入物検知センサにおいて生成される投光信号のタイムチャートである。
【図7】図1の侵入物検知センサにおいて生成される位相差信号を示すための図である。
【図8】図1の侵入物検知センサの効果を説明するための図である。
【図9】変形例にかかる光位相差検出式の侵入物検知センサの構成を説明するためのブロック図である。
【図10】変形例にかかる検知小領域を示す概略斜視図である。
【図11】従来の光位相差検出式の侵入物検知センサの欠点を説明するための図である。
【符号の説明】
【0064】
DA 検知領域
DL1〜DL7 検出光
PA1〜PA7 位相差
PR1〜PR7 位相差参照値
R1〜R7 反射光
1 侵入物検知センサ
18b 位相差平均値算出部
18d 位相差参照値記憶手段
18e 判定手段
33a〜33g 投光素子
35a〜35g 受光素子
36 投光レンズ
37 受光レンズ
51〜57 投光信号
71〜77 受光信号
【特許請求の範囲】
【請求項1】
検知領域への侵入物の有無を検知するセンサであって、
前記検知領域をn個に分割してなる第1〜第nの検知小領域にそれぞれ向かう第1〜第nの検出光を、当該各検出光のためにそれぞれ生成される第1周期ごとの第1〜第nの投光信号に基づいてそれぞれ投光する投光部と、
前記第1〜第nの検出光の前記第1〜第nの検知小領域からの第1〜第nの反射光をそれぞれ受光し、第1〜第nの受光信号をそれぞれ生成する受光部と、
前記第1周期の自然数倍からなる第2周期ごとに、前記第1〜第nの投光信号と前記第1〜第nの受光信号との第1〜第nの位相差をそれぞれ測定する位相差測定手段と、
前記検知領域内に侵入物が無い場合に前記位相差測定手段によって測定されるべき前記第1〜第nの位相差を、第1〜第nの位相差参照値としてそれぞれ予め記憶した位相差参照値記憶手段と、
前記位相差測定手段によって測定された前記第1〜第nの位相差と、前記位相差参照値記憶手段に記憶された前記第1〜第nの位相差参照値との各差のいずれかが所定範囲外にある場合、前記検知領域内に侵入物が有ると判定する判定手段と、
を含んでなることを特徴とする光位相差検出式の侵入物検知センサ。
【請求項2】
前記投光部は、第1〜第nの投光素子と、当該第1〜第nの投光素子の投光側に配置された投光レンズとを含み、
前記第1〜第nの投光素子は、前記第1〜第nの検出光を前記投光レンズに向けてそれぞれ投光し、
前記投光レンズは、前記第1〜第nの投光素子による前記第1〜第nの検出光を受けて、当該第1〜第nの検出光を前記第1〜第nの検知小領域にそれぞれ向かわせるようになっていることを特徴とする請求項1に記載の光位相差検出式の侵入物検知センサ。
【請求項3】
前記受光部は、第1〜第nの受光素子と、当該第1〜第nの受光素子の受光側に配置された受光レンズとを含み、
前記受光レンズは、前記第1〜第nの反射光を受けて、当該第1〜第nの反射光を前記第1〜第nの受光素子にそれぞれ向かわせるようになっており、
前記第1〜第nの受光素子は、前記受光レンズからの前記第1〜第nの検出光をそれぞれ受光し、前記第1〜第nの受光信号をそれぞれ生成することを特徴とする請求項1または2に記載の光位相差検出式の侵入物検知センサ。
【請求項4】
検知領域への侵入物の有無を検知するセンサであって、
前記検知領域に向かう検出光を、当該検出光のために生成される第1周期ごとの投光信号に基づいて投光する投光部と、
前記検出光の前記検知領域をn個に分割してなる第1〜第nの検知小領域からの第1〜第nの反射光をそれぞれ受光し、第1〜第nの受光信号をそれぞれ生成する受光部と、
前記第1周期の自然数倍からなる第2周期ごとに、前記投光信号と前記第1〜第nの受光信号との第1〜第nの位相差をそれぞれ測定する位相差測定手段と、
前記検知領域内に侵入物が無い場合に前記位相差測定手段によって測定されるべき前記第1〜第nの位相差を、第1〜第nの位相差参照値としてそれぞれ予め記憶した位相差参照値記憶手段と、
前記位相差測定手段によって測定された前記第1〜第nの位相差と、前記位相差参照値記憶手段に記憶された前記第1〜第nの位相差参照値との各差のいずれかが所定範囲外にある場合、前記検知領域内に侵入物が有ると判定する判定手段と、
を含んでなることを特徴とする光位相差検出式の侵入物検知センサ。
【請求項5】
前記投光部は、第1〜第nの投光素子と、当該第1〜第nの投光素子の投光側に配置された投光レンズとを含み、
前記第1〜第nの投光素子は、前記検出光を前記投光レンズに向けて投光し、
前記投光レンズは、前記第1〜第nの投光素子による前記検出光を受けて、当該検出光を前記検知領域に向かわせるようになっていることを特徴とする請求項4に記載の光位相差検出式の侵入物検知センサ。
【請求項6】
前記受光部は、第1〜第nの受光素子と、当該第1〜第nの受光素子の受光側に配置された受光レンズとを含み、
前記受光レンズは、前記第1〜第nの反射光を受けて、当該第1〜第nの反射光を前記第1〜第nの受光素子にそれぞれ向かわせるようになっており、
前記第1〜第nの受光素子は、前記受光レンズからの前記第1〜第nの反射光をそれぞれ受光し、前記第1〜第nの受光信号をそれぞれ生成することを特徴とする請求項4または5に記載の光位相差検出式の侵入物検知センサ。
【請求項1】
検知領域への侵入物の有無を検知するセンサであって、
前記検知領域をn個に分割してなる第1〜第nの検知小領域にそれぞれ向かう第1〜第nの検出光を、当該各検出光のためにそれぞれ生成される第1周期ごとの第1〜第nの投光信号に基づいてそれぞれ投光する投光部と、
前記第1〜第nの検出光の前記第1〜第nの検知小領域からの第1〜第nの反射光をそれぞれ受光し、第1〜第nの受光信号をそれぞれ生成する受光部と、
前記第1周期の自然数倍からなる第2周期ごとに、前記第1〜第nの投光信号と前記第1〜第nの受光信号との第1〜第nの位相差をそれぞれ測定する位相差測定手段と、
前記検知領域内に侵入物が無い場合に前記位相差測定手段によって測定されるべき前記第1〜第nの位相差を、第1〜第nの位相差参照値としてそれぞれ予め記憶した位相差参照値記憶手段と、
前記位相差測定手段によって測定された前記第1〜第nの位相差と、前記位相差参照値記憶手段に記憶された前記第1〜第nの位相差参照値との各差のいずれかが所定範囲外にある場合、前記検知領域内に侵入物が有ると判定する判定手段と、
を含んでなることを特徴とする光位相差検出式の侵入物検知センサ。
【請求項2】
前記投光部は、第1〜第nの投光素子と、当該第1〜第nの投光素子の投光側に配置された投光レンズとを含み、
前記第1〜第nの投光素子は、前記第1〜第nの検出光を前記投光レンズに向けてそれぞれ投光し、
前記投光レンズは、前記第1〜第nの投光素子による前記第1〜第nの検出光を受けて、当該第1〜第nの検出光を前記第1〜第nの検知小領域にそれぞれ向かわせるようになっていることを特徴とする請求項1に記載の光位相差検出式の侵入物検知センサ。
【請求項3】
前記受光部は、第1〜第nの受光素子と、当該第1〜第nの受光素子の受光側に配置された受光レンズとを含み、
前記受光レンズは、前記第1〜第nの反射光を受けて、当該第1〜第nの反射光を前記第1〜第nの受光素子にそれぞれ向かわせるようになっており、
前記第1〜第nの受光素子は、前記受光レンズからの前記第1〜第nの検出光をそれぞれ受光し、前記第1〜第nの受光信号をそれぞれ生成することを特徴とする請求項1または2に記載の光位相差検出式の侵入物検知センサ。
【請求項4】
検知領域への侵入物の有無を検知するセンサであって、
前記検知領域に向かう検出光を、当該検出光のために生成される第1周期ごとの投光信号に基づいて投光する投光部と、
前記検出光の前記検知領域をn個に分割してなる第1〜第nの検知小領域からの第1〜第nの反射光をそれぞれ受光し、第1〜第nの受光信号をそれぞれ生成する受光部と、
前記第1周期の自然数倍からなる第2周期ごとに、前記投光信号と前記第1〜第nの受光信号との第1〜第nの位相差をそれぞれ測定する位相差測定手段と、
前記検知領域内に侵入物が無い場合に前記位相差測定手段によって測定されるべき前記第1〜第nの位相差を、第1〜第nの位相差参照値としてそれぞれ予め記憶した位相差参照値記憶手段と、
前記位相差測定手段によって測定された前記第1〜第nの位相差と、前記位相差参照値記憶手段に記憶された前記第1〜第nの位相差参照値との各差のいずれかが所定範囲外にある場合、前記検知領域内に侵入物が有ると判定する判定手段と、
を含んでなることを特徴とする光位相差検出式の侵入物検知センサ。
【請求項5】
前記投光部は、第1〜第nの投光素子と、当該第1〜第nの投光素子の投光側に配置された投光レンズとを含み、
前記第1〜第nの投光素子は、前記検出光を前記投光レンズに向けて投光し、
前記投光レンズは、前記第1〜第nの投光素子による前記検出光を受けて、当該検出光を前記検知領域に向かわせるようになっていることを特徴とする請求項4に記載の光位相差検出式の侵入物検知センサ。
【請求項6】
前記受光部は、第1〜第nの受光素子と、当該第1〜第nの受光素子の受光側に配置された受光レンズとを含み、
前記受光レンズは、前記第1〜第nの反射光を受けて、当該第1〜第nの反射光を前記第1〜第nの受光素子にそれぞれ向かわせるようになっており、
前記第1〜第nの受光素子は、前記受光レンズからの前記第1〜第nの反射光をそれぞれ受光し、前記第1〜第nの受光信号をそれぞれ生成することを特徴とする請求項4または5に記載の光位相差検出式の侵入物検知センサ。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図9】
【図10】
【図11】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図9】
【図10】
【図11】
【図8】
【公開番号】特開2009−276283(P2009−276283A)
【公開日】平成21年11月26日(2009.11.26)
【国際特許分類】
【出願番号】特願2008−129688(P2008−129688)
【出願日】平成20年5月16日(2008.5.16)
【出願人】(000210425)竹中電子工業株式会社 (11)
【出願人】(000101318)株式会社タケックス研究所 (9)
【Fターム(参考)】
【公開日】平成21年11月26日(2009.11.26)
【国際特許分類】
【出願日】平成20年5月16日(2008.5.16)
【出願人】(000210425)竹中電子工業株式会社 (11)
【出願人】(000101318)株式会社タケックス研究所 (9)
【Fターム(参考)】
[ Back to top ]