
光位相差検出式の物体検知センサ
【課題】受光素子に受光される光が過小もしくは過大である場合でも、正確に物体の有無を検知することができる光位相差検出式の物体検知センサを提供する。
【解決手段】第1の周期ごとに受光信号71c〜77cの振幅を測定すると共に、第2の周期ごとに上記振幅に関する平均値AA1〜AA7を算出する振幅平均値算出手段18aと、第1の周期ごとに投光信号50b〜57bと受光信号70b〜77bとの位相差を測定すると共に、第3の周期ごとに上記位相差に関する平均値PA1〜PA7を算出する位相差平均値算出手段18bと、振幅平均値AA1〜AA7と振幅参照値AR1〜AR7との差が第1の範囲外にある場合と、そうでない場合であって位相差平均値PA1〜PA7と位相差参照値PR1〜PR7との差が第2の範囲外にある場合とにおいて、検知領域内に物体が有ると判定する判定手段18eと、を含むようにした。
【解決手段】第1の周期ごとに受光信号71c〜77cの振幅を測定すると共に、第2の周期ごとに上記振幅に関する平均値AA1〜AA7を算出する振幅平均値算出手段18aと、第1の周期ごとに投光信号50b〜57bと受光信号70b〜77bとの位相差を測定すると共に、第3の周期ごとに上記位相差に関する平均値PA1〜PA7を算出する位相差平均値算出手段18bと、振幅平均値AA1〜AA7と振幅参照値AR1〜AR7との差が第1の範囲外にある場合と、そうでない場合であって位相差平均値PA1〜PA7と位相差参照値PR1〜PR7との差が第2の範囲外にある場合とにおいて、検知領域内に物体が有ると判定する判定手段18eと、を含むようにした。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、検知領域の一端に設置され、その検知領域における物体の有無を検知する光位相差検出式の物体検知センサに関する。
【背景技術】
【0002】
ある領域内における人体や車両などの物体の有無を検知するセンサとしては、超音波を利用して反射波の時間を測定する超音波式センサ、光を利用した三角測量式センサ、光の反射光量を測定する光量検出式センサおよび光位相差検出式センサなどが挙げられる。
【0003】
超音波式センサでは、被検知物体の角度変化による影響が大きいといった問題や、周囲の温度変化や風の影響に弱いといった問題がある。
【0004】
光量検出式センサでは、反射光量を検出するため、被検知物体の色の変化に弱いという問題がある。
【0005】
三角測量式センサでは、正確に測定するには、光の焦点を小さく絞る必要があるために、精密な光学系が必要となる。また、検知エリアが小さくなる為に、被検知物体の角度や凸凹の影響を受け易い。また、広いエリアを検出する場合に数多くの光学系素子が必要となり、規模、コストの観点から現実的ではないという問題がある。
【0006】
光位相差検出式センサ(例えば、特許文献1参照)は、投光波と受光波の位相差を検出して、被検知物体までの距離を測定している。これは、上記位相差が被検知物体との距離に比例することを利用したものである。それゆえ、光位相差検出式センサは、原理的に温度等の影響に強く、被検知物体の色の変化にも強い。また、検知エリアが広いため、光学系素子数が少なくても良く、被検知物体の角度や凸凹の影響を受けにくい。
【特許文献1】特開2005−325537号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
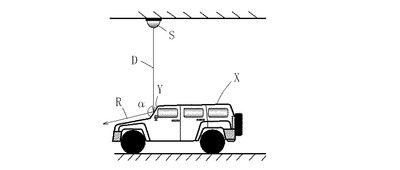
しかしながら、光位相差検出式センサであっても、図8に示す如く、検出光Dと被検知物体Xにおける反射面Yとの角度αが90°を大きく超えるときは、検知センサSに受光される反射光Rの光量がゼロもしくは極めて小さくなり、正確な物体検知ができなかった。また、鏡などによる過大な反射光が受光されるときも、正確な物体検知ができなかった。
【0008】
本発明は上記事情に鑑みてなされたものであり、その目的とするところは、受光素子に受光される反射光の光量が過小もしくは過大である場合でも、正確に物体の有無を検知することができる光位相差検出式の物体検知センサを提供することにある。
【課題を解決するための手段】
【0009】
上記課題を解決するために本発明は、(1)検知領域の一端に設置され、その検知領域における物体の有無を検知するセンサであって、第1の周期ごとに生成される所定数の投光パルスを含む第1の投光信号に基づき、前記検知領域に向けて検出光を投光する第1の投光素子と、前記検出光の前記検知領域からの反射光を受光して第1の受光信号を生成する受光素子と、前記第1の周期ごとに前記第1の受光信号の振幅を測定すると共に、前記第1の周期の自然数倍からなる第2の周期ごとに前記振幅に関する平均値を算出する振幅平均値算出手段と、前記検出光の前記検知領域の他端からの反射光を前記受光素子が受光したときに算出されるべき前記振幅に関する平均値を、振幅参照値として予め記憶した第1の記憶手段と前記第1の周期ごとに前記第1の投光信号と前記第1の受光信号との第1の位相差を測定すると共に、前記第1の周期の自然数倍からなる第3の周期ごとに前記第1の位相差に関する平均値を算出する位相差平均値算出手段と、前記検出光の前記検知領域の他端からの反射光を前記受光素子が受光したときに算出されるべき前記第1の位相差に関する平均値を、位相差参照値として予め記憶した第2の記憶手段と、前記振幅に関する平均値と前記振幅参照値との差が第1の範囲外にある場合と、そうでない場合であって前記第1の位相差に関する平均値と前記位相差参照値との差が第2の範囲外にある場合とにおいて、前記検知領域内に物体が有ると判定する判定手段と、を含んでなることを特徴とする光位相差検出式の物体検知センサを提供するものである。
【0010】
また本発明は、上記構成において、(2)前記振幅参照値および前記位相差参照値を自動的に前記第1および第2の記憶手段に予め記憶させる初期設定手段をさらに含んでいて、前記初期設定手段は、外部からの初期設定信号に応じて、前記振幅平均値算出手段が算出した前記振幅に関する平均値を前記振幅参照値として前記第1の記憶手段に記憶させると共に、前記位相差平均値算出手段が算出した前記第1の位相差に関する平均値を前記位相差参照値として前記第2の記憶手段に記憶させるようになっていることを特徴とする光位相差検出式の物体検知センサを提供するものである。
【0011】
また本発明は、上記構成(2)において、(3)前記初期設定手段は、前記第1の周期ごとに測定した前記振幅の値に応じて、前記第2の周期、前記第3の周期、前記第1の範囲および/または前記第2の範囲を自動的に決定するようになっていることを特徴とする光位相差検出式の物体検知センサを提供するものである。
【0012】
また本発明は、上記構成(2)において、(4)前記初期設定手段は、前記第1の周期ごとに測定した前記第1の位相差のばらつきの程度に応じて、前記第2の周期、前記第3の周期、前記第1の範囲および/または前記第2の範囲を自動的に決定するようになっていることを特徴とする光位相差検出式の物体検知センサを提供するものである。
【0013】
また本発明は、上記構成(2)において、(5)前記初期設定手段は、前記第1の周期ごとに測定した前記振幅の値が所定範囲内である場合、前記第1の周期ごとに測定した前記第1の位相差のばらつきの程度に応じて、前記第2の周期、前記第3の周期、前記第1の範囲および/または前記第2の範囲を自動的に決定し、そうでない場合、エラー信号を生成するようになっていることを特徴とする光位相差検出式の物体検知センサを提供するものである。
【0014】
また本発明は、上記構成(1)〜(5)のいずれかにおいて、(6)前記第1の投光素子および前記受光素子をそれぞれ複数個備え、前記第1の投光信号は、前記各第1の投光素子に対してそれぞれ生成せしめられ、前記各第1の投光素子は、前記各第1の投光信号に基づき、前記検出光を順次投光し、前記受光素子は、前記各検出光について前記第1の受光信号をそれぞれ生成し、前記振幅平均値算出手段は、前記第1の周期ごとに前記各第1の受光信号の振幅をそれぞれ測定すると共に、前記第2の周期ごとに前記各振幅に関する平均値をそれぞれ算出し、前記第1の記憶手段は、前記各振幅に関する平均値についての前記振幅参照値をそれぞれ予め記憶し、前記位相差平均値算出手段は、前記第1の周期ごとに前記各第1の投光信号と前記各第1の受光信号との前記第1の位相差をそれぞれ測定すると共に、前記第3の周期ごとに前記各第1の位相差に関する平均値をそれぞれ算出し、前記第2の記憶手段は、前記各第1の位相差に関する平均値についての前記位相差参照値をそれぞれ予め記憶し、前記判定手段は、前記各振幅に関する平均値と前記各振幅参照値との差のいずれかが前記第1の範囲外にある場合と、そうでない場合であって前記各第1の位相差に関する平均値と前記各位相差参照値との差のいずれかが前記第2の範囲外にある場合とにおいて、前記検知領域内に物体が有ると判定する、ようになっていることを特徴とする光位相差検出式の物体検知センサを提供するものである。
【0015】
また本発明は、上記構成(1)〜(6)のいずれかにおいて、(7)前記受光素子の直近に固定配置された第2の投光素子であって、前記第1の周期ごとに所定数生成される投光パルスを含むと共に前記第1の投光信号と投光タイミングが重ならない第2の投光信号に基づき、前記受光素子に向けて基準光を投光するものをさらに備えていて、前記受光素子はさらに、前記基準光を受光して第2の受光信号を生成し、前記位相差平均値算出手段はさらに、前記第1の周期ごとに前記第2の投光信号と前記第2の受光信号との第2の位相差を測定すると共に、前記第1の位相差と前記第2の位相差との減算値に関する平均値を前記第3の周期ごとに算出し、前記判定手段は、前記振幅平均値算出手段によって算出された前記振幅に関する平均値と前記振幅参照値との差が前記第1の範囲外にある場合と、そうでない場合であって前記位相差平均値算出手段によって算出された前記減算値に関する平均値と前記位相差参照値との差が前記第2の範囲外にある場合とにおいて、前記検知領域内に物体が有ると判定する、ことを特徴とする光位相差検出式の物体検知センサを提供するものである。
【発明の効果】
【0016】
上記のように構成された本発明の物体検知センサによれば、振幅平均値算出手段によって算出された受光信号の振幅に関する平均値と振幅参照値との差が、所定範囲内にあるかどうかが常に判定される。ここで、振幅参照値は、検知領域内に物体が無い場合に、振幅平均値算出手段によって算出されるべき平均値とされている。それゆえ、振幅に関する平均値と振幅参照値との差が所定範囲外であれば、検知領域内に何らかの物体が有ることによって受光素子が過大もしくは過小な反射光を受光しているものと認定し、「物体有り」と判定することができる。つまり、本発明の物体検知センサによれば、受光素子が過大もしくは過小な反射光を受光している状態であっても、誤った検知をすることなく、正確に物体の有無を検知することができる。
【発明を実施するための最良の形態】
【0017】
以下、図面を参照して本発明の好ましい一実施形態につき説明する。
図1は本発明にかかる光位相差検出式の物体検知センサの一例を示す側面図、図2は図1の物体検知センサの本体部を示す側断面図、図3は図1の物体検知センサにおける光学素子の配置を示す底面図である。図4は図1の物体検知センサの回路構成を示すためのブロック図であり、図5は図1の物体検知センサにおいて生成される投光信号のタイムチャートである。図6は図1の物体検知センサにおいて生成される位相差信号を示すための図である。
【0018】
[全体構成]
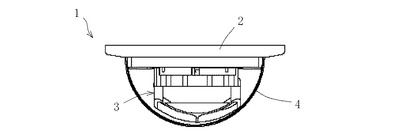
図1に示すように、本実施形態にかかる光位相差検出式の物体検知センサ1は、物体の有無を検知すべき領域の一端に取り付けられるベース部2と、ベース部2に取り付けられた本体部3と、本体部3を覆う透光性のカバー4と、から構成されている。
【0019】
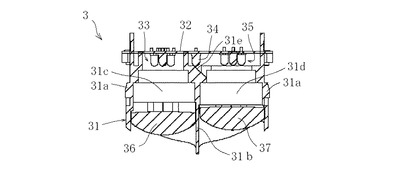
本体部3は主に、図2に示す如く、フレーム31と、フレーム31の一方側に取り付けられた基板32と、基板32の回路上に接続された投光素子33(第1の投光素子)、投光素子34(第2の投光素子)および受光素子35と、フレーム31の他方側に保持された投光用レンズ36および受光用レンズ37と、からなっている。
【0020】
フレーム31は、周壁31aと中央壁31bとを有している。周壁31aおよび中央壁31bは、投光素子33が配置される投光室31cと、受光素子35等が配置される受光室31dとを区画する。
【0021】
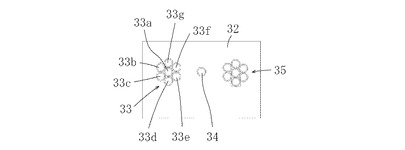
基板32は、投光室31cおよび受光室31dの一方側(図2では上側)を閉じるように配置される。基板32の回路上には、7個の投光素子33が、投光室31c内に収容されるように接続される。投光素子33は、図3に示す如く、投光素子33aを中心にしてその周囲に他の6つの投光素子33b〜33gが配置される。投光素子33は、後述する投光信号51〜57に基づき、検知領域(図2では下側)に向かう光(検出光)を投光する。
【0022】
また、基板32の回路上には、図2に示す如く、1個の投光素子34が、受光室31d内に収容されるように接続される。投光素子34は、後述する投光信号50に基づき、光(基準光)を投光する。投光素子34の直前には傾斜壁31eが設けられているため、投光素子34から投光された基準光は、傾斜壁31eで反射して、受光素子35側に向かうようになっている。
【0023】
また、基板32の回路上には、7個の受光素子35が、受光室31d内に収容されるように接続される。受光素子35は、図3に示す如く、投光素子33と同様に、1つを中心にしてその周囲に他の6つが配置される。受光素子35は、投光素子33a〜33gから投光された各検出光の検知領域からの反射光と、投光素子34から投光された基準光とを受光し、それらに応じてそれぞれ受光信号を生成する。
【0024】
投光用レンズ36は、投光室31cの他方側(図2では下側)を閉じるように配置される。投光用レンズ36は、投光素子33から投光されて検知領域に向かう検出光を集光させる。
【0025】
受光用レンズ37は、受光室31dの他方側(図2では下側)を閉じるように配置される。受光用レンズ37は、検知領域から受光素子35に向かう、検出光の反射光を集光する。
【0026】
[回路構成]
次に、各投光信号を生成すると共に受光信号を処理して、検知領域における物体の有無を検知するための検知回路の構成について説明する。なお、図1〜図3には図示されていないが、検知回路は基板32上に構成されている。
【0027】
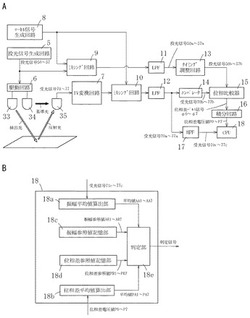
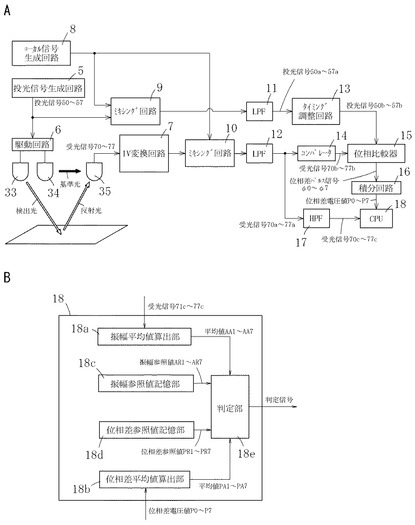
検知回路は、図4に示す如く、投光素子33に検出光を投光させるための投光信号51〜57(第1の投光信号)と投光素子34に基準光を投光させるための投光信号50(第2の投光信号)とを生成する投光信号生成回路5と、投光信号生成回路5によって生成された投光信号50,51〜57に基づいて、投光素子34,投光素子33に基準光,検出光を投光させる駆動回路6と、を有している。
【0028】
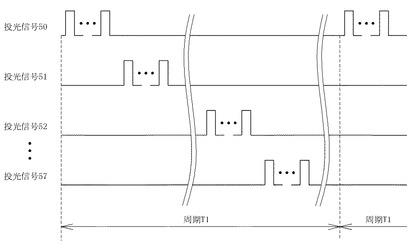
投光信号生成回路5は、図5に示す如く、周期T1(第1の周期)ごとに、投光素子34に対する所定数の投光パルスを含む投光信号50を生成する。駆動回路6は、投光信号50に基づいて、投光素子34に基準光を所定数回投光させる。
【0029】
また、投光信号生成回路5は、周期T1ごとに、投光素子33a〜33gに対する所定数の投光パルスを含む投光信号51〜57をそれぞれ生成する。投光信号51〜57は、投光信号50とタイミングか重ならないように生成される。また、投光信号51〜57は、タイミングがそれぞれ重ならないように順次生成される。駆動回路6は、投光信号51〜57に基づいて、各投光素子33a〜33gに検出光を所定数回投光させる。
【0030】
また、検知回路は、図4に示す如く、受光素子35が検出光の反射光および基準光を受けて生成した受光信号71〜77,70を電圧による信号に変換し、増幅するIV変換回路7を有している。
【0031】
また、検知回路は、ビートダウンを行うべく、ローカル信号を生成するローカル信号生成回路8と、各投光信号50〜57をローカル信号とミキシングするミキシング回路9と、IV変換後の受光信号70〜77をローカル信号とミキシングするミキシング回路10と、を有している。また、検知回路は、ミキシング回路9によって得られた信号の低周波数成分を通過させるローパスフィルタ(LPF)11と、ミキシング回路10によって得られた信号の低周波数成分を通過させるローパスフィルタ(LPF)12と、を有している。
【0032】
また、検知回路は、LPF11を通過した信号のタイミングを調整するタイミング調整回路13と、LPF12を通過した信号を矩形波にするコンパレータ14とを有している。
【0033】
ローカル信号生成回路8は、投光信号50〜57よりも少し短い周期(換言すれば投光信号50〜57の周波数よりも少し高い周波数)のローカル信号(不図示)を生成する。各投光信号50〜57は、ミキシング回路9によってローカル信号とミキシングされたのち、LPF11を通過することで、投光信号50a〜57aとされる。投光信号50a〜57aはさらに、タイミング調整回路13を通過することで、図6に示す投光信号50b〜57bとされる。同様に、IV変換後の受光信号70〜77は、ミキシング回路10によってローカル信号とミキシングされたのち、LPF12を通過することで、受光信号70a〜77aとされる。受光信号70a〜77aはさらに、コンパレータ14を通過することで、図6に示す受光信号70b〜77bとされる。
【0034】
また、検知回路は、投光信号50b〜57bと受光信号70b〜77bとをそれぞれ比較し、それらの位相差に関する位相差パルス信号φ0〜φ7を得る位相比較器15と、位相比較器15からの位相差パルス信号φ0〜φ7を積分して位相差信号pp0〜pp7および位相差電圧値P0〜P7を得る積分回路16とを有している。
【0035】
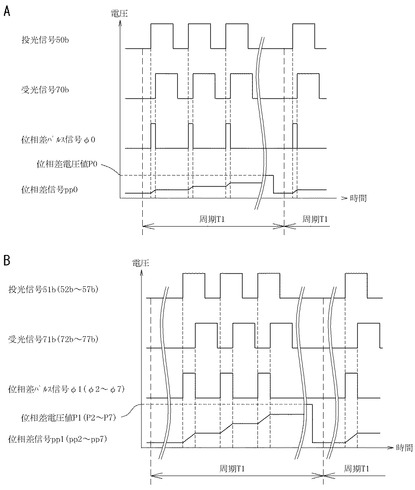
位相比較器15は、図6Aに示す如く、投光信号50bと受光信号70bとを比較し、それらの位相差(第2の位相差)に関する位相差パルス信号φ0を周期T1ごとに生成する。同様に、位相比較器15は、図6Bに示す如く、投光信号51b〜57bと受光信号71b〜77bとを順次比較し、それらの位相差(第1の位相差)に関する位相差パルス信号φ1〜φ7を周期T1ごとに生成する。
【0036】
積分回路16は、図6に示す如く、周期T1ごとに、位相差パルス信号φ0〜φ7を積分して位相差信号pp0〜pp7を生成し、位相差電圧値P0〜P7を得る。
【0037】
検知回路はさらに、LPF12からの受光信号70a〜77aの直流成分をカットして受光信号70c〜77cとするハイパスフィルタ(HPF)17と、HPF17からの受光信号70c〜77cと積分回路16からの位相差電圧値P0〜P7とが入力されるCPU18と、を有している。
【0038】
CPU18は、図4Bに示す如く、HPF17からの受光信号71c〜77cに基づいて、受光信号71c〜77cの振幅に関する平均値をそれぞれ算出する振幅平均値算出部18aと、各位相差電圧値P0〜P7に基づいて、投光信号50b〜57bと受光信号70b〜77bとの位相差に関する平均値をそれぞれ算出する位相差平均値算出部18bと、を有している。
【0039】
振幅平均値算出部18aは、周期T1ごとに、受光信号71c〜77cの振幅値、つまり各受光信号71c〜77cの最大電圧値をそれぞれ得る。ここで、受光信号71c〜77cは正弦波であるため、この最大電圧値を得るには、振幅がピークとなるタイミングで電圧値をサンプリングする必要がある。しかし、それには、検波回路やピークホールドが必要となり、回路規模が大きくなる。それゆえ、本実施形態では、受光信号71c〜77c周期T1ごとに所定タイミングで複数回サンプリングし、それぞれ得られた電圧値の絶対値の最大値が最大電圧値とされる。
【0040】
そして、振幅平均値算出部18aは、周期T1の自然数倍からなる周期T2(第2の周期)ごとに、各最大電圧値の平均値AA1〜AA7をそれぞれ算出する。
【0041】
位相差平均値算出部18bは、位相差電圧値P1〜P7から位相差電圧値P0を減算した値DP1〜DP7(DP1=P1−P0,DP2=P2−P0,・・・,DP7=P7−P0)を算出すると共に、周期T1の自然数倍からなる周期T3(第3の周期)ごとに、減算値DP1〜DP7の平均値PA1〜PA7をそれぞれ算出する。
【0042】
CPU18はさらに、検知領域内に物体が無い場合に振幅平均値算出部18aによって算出されるべき上記平均値AA1〜AA7を、振幅参照値AR1〜AR7として予め記憶した振幅参照値記憶部(第1の記憶手段)18cと、検知領域内に物体が無い場合に位相差平均値算出部18bによって算出されるべき上記平均値PA1〜PA7を、位相差参照値PR1〜PR7として予め記憶した位相差参照値記憶部(第3の記憶手段)18dと、を有している。
【0043】
また、CPU18は、振幅参照値AR1〜AR7、位相差参照値PR1〜PR7、振幅平均値算出部18aによって算出された平均値AA1〜AA7および位相差平均値算出部18bによって算出された平均値PA1〜PA7に基づいて、検知領域内における物体の有無を判定し、判定信号を出力する判定部18eを有している。
【0044】
判定部18eは、表1に示す如く、振幅平均値算出部18aによって算出された振幅に関する平均値AA1〜AA7と振幅参照値AR1〜AR7との差AA1−AR1,AA2−AR2,・・・,AA7−AR7のいずれかが所定範囲(第1の範囲)外にある場合、検知領域内に何らかの物体が有ると判定する。
一方、振幅に関する平均値AA1〜AA7と振幅参照値AR1〜AR7との差が所定範囲内にある場合であって、位相差平均値算出部18bによって算出された位相差に関する平均値PA1〜PA7と位相差参照値PR1〜PR7との差PA1−PR1,PA2−PR2,・・・,PA7−PR7のいずれかが所定範囲(第2の範囲)外にある場合、判定部18eは、検知領域内に物体が有ると判定する。
そして、判定部18eは、上記以外の場合、検知領域内に物体は無いと判定する。
【0045】
【表1】

【0046】
つまり、判定部18eは、受光信号71c〜77cの振幅に関する平均値AA1〜AA7と振幅参照値AR1〜AR7との差のいずれかが第1の範囲外である場合、検知領域内に何らかの物体が有ることによって、受光素子35が過大もしくは過小な反射光を受光しているものと認定し、「物体有り」と判定する。
一方、振幅に関する平均値AA1〜AA7と振幅参照値AR1〜AR7との差がいずれも第1の範囲内である場合、判定部18eは、従来の光位相差検出式の物体検知センサと同様に物体の有無を検知する。すなわち、判定部18eは、位相差に関する平均値PA1〜PA7と位相差参照値PR1〜PR7との差のいずれかが第2の範囲外にある場合、「物体有り」と判定し、そうでない場合「物体無し」と判定する。
【0047】
[作用・効果]
以上のように構成された光位相差検出式の物体検知センサ1によれば、振幅平均値算出部18aによって算出された受光信号71c〜77cの振幅に関する平均値AA1〜AA7と振幅参照値AR1〜AR7との差が、所定範囲(第1の範囲)内にあるかどうかが常に判定される。ここで、振幅参照値AR1〜AR7は、検知領域内に物体が無い場合に、振幅平均値算出部18aによって算出されるべき平均値AA1〜AA7とされている。それゆえ、振幅に関する平均値AA1〜AA7と振幅参照値AR1〜AR7との差が所定範囲外であれば、検知領域内に何らかの物体が有ることによって受光素子35が過大もしくは過小な反射光を受光しているものと認定し、「物体有り」と判定することができる。つまり、物体検知センサ1によれば、受光素子35が過大もしくは過小な反射光を受光している状態でも、誤った検知をすることなく、正確に物体の有無を検知することができる。
【0048】
また、物体検知センサ1は、受光素子35の直近に固定配置された投光素子34を備えていて、当該投光素子34が、受光素子35に直接受光される基準光を投光するようになっている。
ここで、基準光は直接受光素子35によって受光されるから、基準光についての位相差電圧値P0は、原理的には常に一定になるはずである。しかし、実際は、検知回路上の電子部品が温度特性を有しているため、周囲温度の影響によって位相差電圧値P0は変化する。同様に、各投光素子33の検出光の反射光についての位相差電圧値P1〜P7も周囲温度によって変化する。
そこで、物体検知センサ1は、当該投光素子34からの基準光についての位相差電圧値P0を、各投光素子33の検出光の反射光についての位相差電圧値P1〜P7から減算した値DP1〜DP7を算出し、この減算値DP1〜DP7の平均値PA1〜PA7と位相差参照値PR1〜PR7との差が所定範囲内にあるかどうかに基づいて、物体検知を行なうようになっている。周囲温度によって位相差電圧値が変化していても、この減算によってその変化分がキャンセルされるので、物体検知センサ1は、周囲温度によらず、常に正確に物体の有無を検知することができる。
【0049】
また、物体検知センサ1は、複数の投光素子33および受光素子35を有しているため、比較的広い検知領域において、物体の有無を検知することができる。
【0050】
[変形例]
以上、本発明の実施形態について具体的に説明したが、本発明は次のように変形して実施することができる。
【0051】
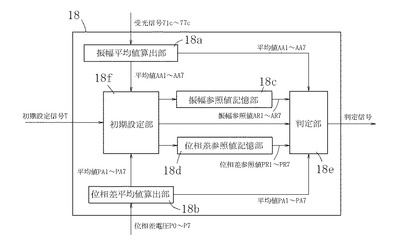
例えば、図7に示す如く、振幅参照値AR1〜AR7および位相差参照値PR1〜PR7を、自動的に振幅参照値記憶手段18cおよび位相差参照値記憶手段18dに予め記憶させる初期設定部18fをCPU18に設けてもよい。
【0052】
初期設定部18fは、物体検知センサ1が検知領域の一端に設置された際等であって、検知領域内に物体が無いときに作動せしめられ、種々の初期設定をする。初期設定部18fは、外部から初期設定信号Tを受けた際、振幅平均値算出部18aが算出した振幅に関する平均値AA1〜AA7を、振幅参照値AR1〜AR7として振幅参照値記憶部18cに記憶させる。同様に、初期設定部18fは、外部から初期設定信号Tを受けた際、位相差平均値算出部18bが算出した位相差に関する平均値PA1〜PA7を、位相差参照値PR1〜PR7として位相差参照値記憶部18dに記憶させる。
【0053】
初期設定部18fはさらに、位相差参照値記憶部18dに記憶させた平均値PA1〜PA7の元データである位相差に関する減算値DP1〜DP7のばらつきをそれぞれ測定する。
【0054】
初期設定部18fは、表2に示す如く、振幅参照値記憶部18cに記憶させた平均値AA1〜AA7の元データである振幅に関する最大電圧値(振幅値)が所定範囲内にあるかどうかと、上記減算値DP1〜DP7のばらつきが所定範囲内にあるかどうかとに基づいて、各平均値AA1〜AA7,PA1〜PA7の各算出周期T2および/またはT3と、判定部18eが物体有無の判定に用いる第1の範囲および/または第2の範囲とを、自動的に設定する。
【0055】
【表2】
【0056】
つまり、初期設定部18fは、上記振幅値のいずれかが所定範囲外である場合、受光素子35が過大もしくは過小な反射光を受光しており、各初期設定を行なう環境にないとして初期設定を行なわず、エラー信号を生成する。なお、当該エラー信号が生成された場合は、異常な反射光を引き起こした要因が作業者によって取り除かれた後、再度初期設定信号Tが入力され、初期設定が実行される。
【0057】
一方、上記振幅値のいずれもが所定範囲内である場合であって、位相差に関する減算値DP1〜DP7の各ばらつきのいずれかが所定範囲外にある場合、初期設定部18fは、検知領域内が何らかの影響で位相差検出にばらつきを生じ易い環境になっていると認定する。そして、初期設定部18fは、この環境に対応すべく、平均値算出周期T2,T3を初期値よりも長くすると共に、第1の範囲,第2の範囲を初期値よりも広くする。
【0058】
上記のような初期設定部18fを備えた物体検知センサ1によれば、自動的に各参照値AR1〜AR7,PR1〜PR7を、各参照値記憶部18c,18dに記憶させることができる。
【0059】
また、初期設定部18fを備えた物体検知センサ1によれば、実際に設置された検知領域における他端の反射状況に応じて、平均値算出周期T2,T3ならびに物体有無判定のための第1の範囲,第2の範囲を最適かつ自動的に設定することができる。
【0060】
なお、上記変形例では、振幅値と、位相差に関する減算値のばらつきとに応じて、平均値算出周期および第1,第2の範囲を調整したが、振幅に関する最大電圧値の大きさのみに応じて調整してもよいし、位相差に関する減算値のばらつきのみに応じて調整してもよい。また、振幅に関する最大電圧値の大きさまたは位相差に関する減算値のばらつきに応じて、各平均値算出周期、第1の範囲および第2の範囲のいずれかを適宜選択して調整するようにしてもよい。
【0061】
また、投光素子33および受光素子35は、少なくとも1つあれば足り、検知領域の広さに応じて個数を適宜変更することができる。
【0062】
また、基準光を投光する投光素子34は、周囲温度による影響が無視できるような場合、省略することができる。
【図面の簡単な説明】
【0063】
【図1】本発明にかかる光位相差検出式の物体検知センサの一例を示す側面図である。
【図2】図1の物体検知センサの本体部を示す側断面図である。
【図3】図1の物体検知センサにおける光学素子の配置を示す底面図である。
【図4】図1の物体検知センサの回路構成を示すためのブロック図である。
【図5】図1の物体検知センサにおいて生成される投光信号のタイムチャートである。
【図6】図1の物体検知センサにおいて生成される位相差信号を示すための図である。
【図7】変形例にかかる光位相差検出式の物体検知センサのCPUを示すブロック図である。
【図8】従来の光位相差検出式の物体検知センサの欠点を説明するための図である。
【符号の説明】
【0064】
AA1〜AA7 振幅に関する平均値
AR1〜AR7 振幅参照値
PA1〜PA7 位相差に関する平均値
PR1〜PR7 位相差参照値
18a 振幅平均値算出手段(振幅平均値算出部)
18b 位相差平均値算出手段(位相差平均値算出部)
18e 判定手段(判定部)
50b〜57b 投光信号
70b〜77b、71c〜77c 受光信号
【技術分野】
【0001】
本発明は、検知領域の一端に設置され、その検知領域における物体の有無を検知する光位相差検出式の物体検知センサに関する。
【背景技術】
【0002】
ある領域内における人体や車両などの物体の有無を検知するセンサとしては、超音波を利用して反射波の時間を測定する超音波式センサ、光を利用した三角測量式センサ、光の反射光量を測定する光量検出式センサおよび光位相差検出式センサなどが挙げられる。
【0003】
超音波式センサでは、被検知物体の角度変化による影響が大きいといった問題や、周囲の温度変化や風の影響に弱いといった問題がある。
【0004】
光量検出式センサでは、反射光量を検出するため、被検知物体の色の変化に弱いという問題がある。
【0005】
三角測量式センサでは、正確に測定するには、光の焦点を小さく絞る必要があるために、精密な光学系が必要となる。また、検知エリアが小さくなる為に、被検知物体の角度や凸凹の影響を受け易い。また、広いエリアを検出する場合に数多くの光学系素子が必要となり、規模、コストの観点から現実的ではないという問題がある。
【0006】
光位相差検出式センサ(例えば、特許文献1参照)は、投光波と受光波の位相差を検出して、被検知物体までの距離を測定している。これは、上記位相差が被検知物体との距離に比例することを利用したものである。それゆえ、光位相差検出式センサは、原理的に温度等の影響に強く、被検知物体の色の変化にも強い。また、検知エリアが広いため、光学系素子数が少なくても良く、被検知物体の角度や凸凹の影響を受けにくい。
【特許文献1】特開2005−325537号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
しかしながら、光位相差検出式センサであっても、図8に示す如く、検出光Dと被検知物体Xにおける反射面Yとの角度αが90°を大きく超えるときは、検知センサSに受光される反射光Rの光量がゼロもしくは極めて小さくなり、正確な物体検知ができなかった。また、鏡などによる過大な反射光が受光されるときも、正確な物体検知ができなかった。
【0008】
本発明は上記事情に鑑みてなされたものであり、その目的とするところは、受光素子に受光される反射光の光量が過小もしくは過大である場合でも、正確に物体の有無を検知することができる光位相差検出式の物体検知センサを提供することにある。
【課題を解決するための手段】
【0009】
上記課題を解決するために本発明は、(1)検知領域の一端に設置され、その検知領域における物体の有無を検知するセンサであって、第1の周期ごとに生成される所定数の投光パルスを含む第1の投光信号に基づき、前記検知領域に向けて検出光を投光する第1の投光素子と、前記検出光の前記検知領域からの反射光を受光して第1の受光信号を生成する受光素子と、前記第1の周期ごとに前記第1の受光信号の振幅を測定すると共に、前記第1の周期の自然数倍からなる第2の周期ごとに前記振幅に関する平均値を算出する振幅平均値算出手段と、前記検出光の前記検知領域の他端からの反射光を前記受光素子が受光したときに算出されるべき前記振幅に関する平均値を、振幅参照値として予め記憶した第1の記憶手段と前記第1の周期ごとに前記第1の投光信号と前記第1の受光信号との第1の位相差を測定すると共に、前記第1の周期の自然数倍からなる第3の周期ごとに前記第1の位相差に関する平均値を算出する位相差平均値算出手段と、前記検出光の前記検知領域の他端からの反射光を前記受光素子が受光したときに算出されるべき前記第1の位相差に関する平均値を、位相差参照値として予め記憶した第2の記憶手段と、前記振幅に関する平均値と前記振幅参照値との差が第1の範囲外にある場合と、そうでない場合であって前記第1の位相差に関する平均値と前記位相差参照値との差が第2の範囲外にある場合とにおいて、前記検知領域内に物体が有ると判定する判定手段と、を含んでなることを特徴とする光位相差検出式の物体検知センサを提供するものである。
【0010】
また本発明は、上記構成において、(2)前記振幅参照値および前記位相差参照値を自動的に前記第1および第2の記憶手段に予め記憶させる初期設定手段をさらに含んでいて、前記初期設定手段は、外部からの初期設定信号に応じて、前記振幅平均値算出手段が算出した前記振幅に関する平均値を前記振幅参照値として前記第1の記憶手段に記憶させると共に、前記位相差平均値算出手段が算出した前記第1の位相差に関する平均値を前記位相差参照値として前記第2の記憶手段に記憶させるようになっていることを特徴とする光位相差検出式の物体検知センサを提供するものである。
【0011】
また本発明は、上記構成(2)において、(3)前記初期設定手段は、前記第1の周期ごとに測定した前記振幅の値に応じて、前記第2の周期、前記第3の周期、前記第1の範囲および/または前記第2の範囲を自動的に決定するようになっていることを特徴とする光位相差検出式の物体検知センサを提供するものである。
【0012】
また本発明は、上記構成(2)において、(4)前記初期設定手段は、前記第1の周期ごとに測定した前記第1の位相差のばらつきの程度に応じて、前記第2の周期、前記第3の周期、前記第1の範囲および/または前記第2の範囲を自動的に決定するようになっていることを特徴とする光位相差検出式の物体検知センサを提供するものである。
【0013】
また本発明は、上記構成(2)において、(5)前記初期設定手段は、前記第1の周期ごとに測定した前記振幅の値が所定範囲内である場合、前記第1の周期ごとに測定した前記第1の位相差のばらつきの程度に応じて、前記第2の周期、前記第3の周期、前記第1の範囲および/または前記第2の範囲を自動的に決定し、そうでない場合、エラー信号を生成するようになっていることを特徴とする光位相差検出式の物体検知センサを提供するものである。
【0014】
また本発明は、上記構成(1)〜(5)のいずれかにおいて、(6)前記第1の投光素子および前記受光素子をそれぞれ複数個備え、前記第1の投光信号は、前記各第1の投光素子に対してそれぞれ生成せしめられ、前記各第1の投光素子は、前記各第1の投光信号に基づき、前記検出光を順次投光し、前記受光素子は、前記各検出光について前記第1の受光信号をそれぞれ生成し、前記振幅平均値算出手段は、前記第1の周期ごとに前記各第1の受光信号の振幅をそれぞれ測定すると共に、前記第2の周期ごとに前記各振幅に関する平均値をそれぞれ算出し、前記第1の記憶手段は、前記各振幅に関する平均値についての前記振幅参照値をそれぞれ予め記憶し、前記位相差平均値算出手段は、前記第1の周期ごとに前記各第1の投光信号と前記各第1の受光信号との前記第1の位相差をそれぞれ測定すると共に、前記第3の周期ごとに前記各第1の位相差に関する平均値をそれぞれ算出し、前記第2の記憶手段は、前記各第1の位相差に関する平均値についての前記位相差参照値をそれぞれ予め記憶し、前記判定手段は、前記各振幅に関する平均値と前記各振幅参照値との差のいずれかが前記第1の範囲外にある場合と、そうでない場合であって前記各第1の位相差に関する平均値と前記各位相差参照値との差のいずれかが前記第2の範囲外にある場合とにおいて、前記検知領域内に物体が有ると判定する、ようになっていることを特徴とする光位相差検出式の物体検知センサを提供するものである。
【0015】
また本発明は、上記構成(1)〜(6)のいずれかにおいて、(7)前記受光素子の直近に固定配置された第2の投光素子であって、前記第1の周期ごとに所定数生成される投光パルスを含むと共に前記第1の投光信号と投光タイミングが重ならない第2の投光信号に基づき、前記受光素子に向けて基準光を投光するものをさらに備えていて、前記受光素子はさらに、前記基準光を受光して第2の受光信号を生成し、前記位相差平均値算出手段はさらに、前記第1の周期ごとに前記第2の投光信号と前記第2の受光信号との第2の位相差を測定すると共に、前記第1の位相差と前記第2の位相差との減算値に関する平均値を前記第3の周期ごとに算出し、前記判定手段は、前記振幅平均値算出手段によって算出された前記振幅に関する平均値と前記振幅参照値との差が前記第1の範囲外にある場合と、そうでない場合であって前記位相差平均値算出手段によって算出された前記減算値に関する平均値と前記位相差参照値との差が前記第2の範囲外にある場合とにおいて、前記検知領域内に物体が有ると判定する、ことを特徴とする光位相差検出式の物体検知センサを提供するものである。
【発明の効果】
【0016】
上記のように構成された本発明の物体検知センサによれば、振幅平均値算出手段によって算出された受光信号の振幅に関する平均値と振幅参照値との差が、所定範囲内にあるかどうかが常に判定される。ここで、振幅参照値は、検知領域内に物体が無い場合に、振幅平均値算出手段によって算出されるべき平均値とされている。それゆえ、振幅に関する平均値と振幅参照値との差が所定範囲外であれば、検知領域内に何らかの物体が有ることによって受光素子が過大もしくは過小な反射光を受光しているものと認定し、「物体有り」と判定することができる。つまり、本発明の物体検知センサによれば、受光素子が過大もしくは過小な反射光を受光している状態であっても、誤った検知をすることなく、正確に物体の有無を検知することができる。
【発明を実施するための最良の形態】
【0017】
以下、図面を参照して本発明の好ましい一実施形態につき説明する。
図1は本発明にかかる光位相差検出式の物体検知センサの一例を示す側面図、図2は図1の物体検知センサの本体部を示す側断面図、図3は図1の物体検知センサにおける光学素子の配置を示す底面図である。図4は図1の物体検知センサの回路構成を示すためのブロック図であり、図5は図1の物体検知センサにおいて生成される投光信号のタイムチャートである。図6は図1の物体検知センサにおいて生成される位相差信号を示すための図である。
【0018】
[全体構成]
図1に示すように、本実施形態にかかる光位相差検出式の物体検知センサ1は、物体の有無を検知すべき領域の一端に取り付けられるベース部2と、ベース部2に取り付けられた本体部3と、本体部3を覆う透光性のカバー4と、から構成されている。
【0019】
本体部3は主に、図2に示す如く、フレーム31と、フレーム31の一方側に取り付けられた基板32と、基板32の回路上に接続された投光素子33(第1の投光素子)、投光素子34(第2の投光素子)および受光素子35と、フレーム31の他方側に保持された投光用レンズ36および受光用レンズ37と、からなっている。
【0020】
フレーム31は、周壁31aと中央壁31bとを有している。周壁31aおよび中央壁31bは、投光素子33が配置される投光室31cと、受光素子35等が配置される受光室31dとを区画する。
【0021】
基板32は、投光室31cおよび受光室31dの一方側(図2では上側)を閉じるように配置される。基板32の回路上には、7個の投光素子33が、投光室31c内に収容されるように接続される。投光素子33は、図3に示す如く、投光素子33aを中心にしてその周囲に他の6つの投光素子33b〜33gが配置される。投光素子33は、後述する投光信号51〜57に基づき、検知領域(図2では下側)に向かう光(検出光)を投光する。
【0022】
また、基板32の回路上には、図2に示す如く、1個の投光素子34が、受光室31d内に収容されるように接続される。投光素子34は、後述する投光信号50に基づき、光(基準光)を投光する。投光素子34の直前には傾斜壁31eが設けられているため、投光素子34から投光された基準光は、傾斜壁31eで反射して、受光素子35側に向かうようになっている。
【0023】
また、基板32の回路上には、7個の受光素子35が、受光室31d内に収容されるように接続される。受光素子35は、図3に示す如く、投光素子33と同様に、1つを中心にしてその周囲に他の6つが配置される。受光素子35は、投光素子33a〜33gから投光された各検出光の検知領域からの反射光と、投光素子34から投光された基準光とを受光し、それらに応じてそれぞれ受光信号を生成する。
【0024】
投光用レンズ36は、投光室31cの他方側(図2では下側)を閉じるように配置される。投光用レンズ36は、投光素子33から投光されて検知領域に向かう検出光を集光させる。
【0025】
受光用レンズ37は、受光室31dの他方側(図2では下側)を閉じるように配置される。受光用レンズ37は、検知領域から受光素子35に向かう、検出光の反射光を集光する。
【0026】
[回路構成]
次に、各投光信号を生成すると共に受光信号を処理して、検知領域における物体の有無を検知するための検知回路の構成について説明する。なお、図1〜図3には図示されていないが、検知回路は基板32上に構成されている。
【0027】
検知回路は、図4に示す如く、投光素子33に検出光を投光させるための投光信号51〜57(第1の投光信号)と投光素子34に基準光を投光させるための投光信号50(第2の投光信号)とを生成する投光信号生成回路5と、投光信号生成回路5によって生成された投光信号50,51〜57に基づいて、投光素子34,投光素子33に基準光,検出光を投光させる駆動回路6と、を有している。
【0028】
投光信号生成回路5は、図5に示す如く、周期T1(第1の周期)ごとに、投光素子34に対する所定数の投光パルスを含む投光信号50を生成する。駆動回路6は、投光信号50に基づいて、投光素子34に基準光を所定数回投光させる。
【0029】
また、投光信号生成回路5は、周期T1ごとに、投光素子33a〜33gに対する所定数の投光パルスを含む投光信号51〜57をそれぞれ生成する。投光信号51〜57は、投光信号50とタイミングか重ならないように生成される。また、投光信号51〜57は、タイミングがそれぞれ重ならないように順次生成される。駆動回路6は、投光信号51〜57に基づいて、各投光素子33a〜33gに検出光を所定数回投光させる。
【0030】
また、検知回路は、図4に示す如く、受光素子35が検出光の反射光および基準光を受けて生成した受光信号71〜77,70を電圧による信号に変換し、増幅するIV変換回路7を有している。
【0031】
また、検知回路は、ビートダウンを行うべく、ローカル信号を生成するローカル信号生成回路8と、各投光信号50〜57をローカル信号とミキシングするミキシング回路9と、IV変換後の受光信号70〜77をローカル信号とミキシングするミキシング回路10と、を有している。また、検知回路は、ミキシング回路9によって得られた信号の低周波数成分を通過させるローパスフィルタ(LPF)11と、ミキシング回路10によって得られた信号の低周波数成分を通過させるローパスフィルタ(LPF)12と、を有している。
【0032】
また、検知回路は、LPF11を通過した信号のタイミングを調整するタイミング調整回路13と、LPF12を通過した信号を矩形波にするコンパレータ14とを有している。
【0033】
ローカル信号生成回路8は、投光信号50〜57よりも少し短い周期(換言すれば投光信号50〜57の周波数よりも少し高い周波数)のローカル信号(不図示)を生成する。各投光信号50〜57は、ミキシング回路9によってローカル信号とミキシングされたのち、LPF11を通過することで、投光信号50a〜57aとされる。投光信号50a〜57aはさらに、タイミング調整回路13を通過することで、図6に示す投光信号50b〜57bとされる。同様に、IV変換後の受光信号70〜77は、ミキシング回路10によってローカル信号とミキシングされたのち、LPF12を通過することで、受光信号70a〜77aとされる。受光信号70a〜77aはさらに、コンパレータ14を通過することで、図6に示す受光信号70b〜77bとされる。
【0034】
また、検知回路は、投光信号50b〜57bと受光信号70b〜77bとをそれぞれ比較し、それらの位相差に関する位相差パルス信号φ0〜φ7を得る位相比較器15と、位相比較器15からの位相差パルス信号φ0〜φ7を積分して位相差信号pp0〜pp7および位相差電圧値P0〜P7を得る積分回路16とを有している。
【0035】
位相比較器15は、図6Aに示す如く、投光信号50bと受光信号70bとを比較し、それらの位相差(第2の位相差)に関する位相差パルス信号φ0を周期T1ごとに生成する。同様に、位相比較器15は、図6Bに示す如く、投光信号51b〜57bと受光信号71b〜77bとを順次比較し、それらの位相差(第1の位相差)に関する位相差パルス信号φ1〜φ7を周期T1ごとに生成する。
【0036】
積分回路16は、図6に示す如く、周期T1ごとに、位相差パルス信号φ0〜φ7を積分して位相差信号pp0〜pp7を生成し、位相差電圧値P0〜P7を得る。
【0037】
検知回路はさらに、LPF12からの受光信号70a〜77aの直流成分をカットして受光信号70c〜77cとするハイパスフィルタ(HPF)17と、HPF17からの受光信号70c〜77cと積分回路16からの位相差電圧値P0〜P7とが入力されるCPU18と、を有している。
【0038】
CPU18は、図4Bに示す如く、HPF17からの受光信号71c〜77cに基づいて、受光信号71c〜77cの振幅に関する平均値をそれぞれ算出する振幅平均値算出部18aと、各位相差電圧値P0〜P7に基づいて、投光信号50b〜57bと受光信号70b〜77bとの位相差に関する平均値をそれぞれ算出する位相差平均値算出部18bと、を有している。
【0039】
振幅平均値算出部18aは、周期T1ごとに、受光信号71c〜77cの振幅値、つまり各受光信号71c〜77cの最大電圧値をそれぞれ得る。ここで、受光信号71c〜77cは正弦波であるため、この最大電圧値を得るには、振幅がピークとなるタイミングで電圧値をサンプリングする必要がある。しかし、それには、検波回路やピークホールドが必要となり、回路規模が大きくなる。それゆえ、本実施形態では、受光信号71c〜77c周期T1ごとに所定タイミングで複数回サンプリングし、それぞれ得られた電圧値の絶対値の最大値が最大電圧値とされる。
【0040】
そして、振幅平均値算出部18aは、周期T1の自然数倍からなる周期T2(第2の周期)ごとに、各最大電圧値の平均値AA1〜AA7をそれぞれ算出する。
【0041】
位相差平均値算出部18bは、位相差電圧値P1〜P7から位相差電圧値P0を減算した値DP1〜DP7(DP1=P1−P0,DP2=P2−P0,・・・,DP7=P7−P0)を算出すると共に、周期T1の自然数倍からなる周期T3(第3の周期)ごとに、減算値DP1〜DP7の平均値PA1〜PA7をそれぞれ算出する。
【0042】
CPU18はさらに、検知領域内に物体が無い場合に振幅平均値算出部18aによって算出されるべき上記平均値AA1〜AA7を、振幅参照値AR1〜AR7として予め記憶した振幅参照値記憶部(第1の記憶手段)18cと、検知領域内に物体が無い場合に位相差平均値算出部18bによって算出されるべき上記平均値PA1〜PA7を、位相差参照値PR1〜PR7として予め記憶した位相差参照値記憶部(第3の記憶手段)18dと、を有している。
【0043】
また、CPU18は、振幅参照値AR1〜AR7、位相差参照値PR1〜PR7、振幅平均値算出部18aによって算出された平均値AA1〜AA7および位相差平均値算出部18bによって算出された平均値PA1〜PA7に基づいて、検知領域内における物体の有無を判定し、判定信号を出力する判定部18eを有している。
【0044】
判定部18eは、表1に示す如く、振幅平均値算出部18aによって算出された振幅に関する平均値AA1〜AA7と振幅参照値AR1〜AR7との差AA1−AR1,AA2−AR2,・・・,AA7−AR7のいずれかが所定範囲(第1の範囲)外にある場合、検知領域内に何らかの物体が有ると判定する。
一方、振幅に関する平均値AA1〜AA7と振幅参照値AR1〜AR7との差が所定範囲内にある場合であって、位相差平均値算出部18bによって算出された位相差に関する平均値PA1〜PA7と位相差参照値PR1〜PR7との差PA1−PR1,PA2−PR2,・・・,PA7−PR7のいずれかが所定範囲(第2の範囲)外にある場合、判定部18eは、検知領域内に物体が有ると判定する。
そして、判定部18eは、上記以外の場合、検知領域内に物体は無いと判定する。
【0045】
【表1】
【0046】
つまり、判定部18eは、受光信号71c〜77cの振幅に関する平均値AA1〜AA7と振幅参照値AR1〜AR7との差のいずれかが第1の範囲外である場合、検知領域内に何らかの物体が有ることによって、受光素子35が過大もしくは過小な反射光を受光しているものと認定し、「物体有り」と判定する。
一方、振幅に関する平均値AA1〜AA7と振幅参照値AR1〜AR7との差がいずれも第1の範囲内である場合、判定部18eは、従来の光位相差検出式の物体検知センサと同様に物体の有無を検知する。すなわち、判定部18eは、位相差に関する平均値PA1〜PA7と位相差参照値PR1〜PR7との差のいずれかが第2の範囲外にある場合、「物体有り」と判定し、そうでない場合「物体無し」と判定する。
【0047】
[作用・効果]
以上のように構成された光位相差検出式の物体検知センサ1によれば、振幅平均値算出部18aによって算出された受光信号71c〜77cの振幅に関する平均値AA1〜AA7と振幅参照値AR1〜AR7との差が、所定範囲(第1の範囲)内にあるかどうかが常に判定される。ここで、振幅参照値AR1〜AR7は、検知領域内に物体が無い場合に、振幅平均値算出部18aによって算出されるべき平均値AA1〜AA7とされている。それゆえ、振幅に関する平均値AA1〜AA7と振幅参照値AR1〜AR7との差が所定範囲外であれば、検知領域内に何らかの物体が有ることによって受光素子35が過大もしくは過小な反射光を受光しているものと認定し、「物体有り」と判定することができる。つまり、物体検知センサ1によれば、受光素子35が過大もしくは過小な反射光を受光している状態でも、誤った検知をすることなく、正確に物体の有無を検知することができる。
【0048】
また、物体検知センサ1は、受光素子35の直近に固定配置された投光素子34を備えていて、当該投光素子34が、受光素子35に直接受光される基準光を投光するようになっている。
ここで、基準光は直接受光素子35によって受光されるから、基準光についての位相差電圧値P0は、原理的には常に一定になるはずである。しかし、実際は、検知回路上の電子部品が温度特性を有しているため、周囲温度の影響によって位相差電圧値P0は変化する。同様に、各投光素子33の検出光の反射光についての位相差電圧値P1〜P7も周囲温度によって変化する。
そこで、物体検知センサ1は、当該投光素子34からの基準光についての位相差電圧値P0を、各投光素子33の検出光の反射光についての位相差電圧値P1〜P7から減算した値DP1〜DP7を算出し、この減算値DP1〜DP7の平均値PA1〜PA7と位相差参照値PR1〜PR7との差が所定範囲内にあるかどうかに基づいて、物体検知を行なうようになっている。周囲温度によって位相差電圧値が変化していても、この減算によってその変化分がキャンセルされるので、物体検知センサ1は、周囲温度によらず、常に正確に物体の有無を検知することができる。
【0049】
また、物体検知センサ1は、複数の投光素子33および受光素子35を有しているため、比較的広い検知領域において、物体の有無を検知することができる。
【0050】
[変形例]
以上、本発明の実施形態について具体的に説明したが、本発明は次のように変形して実施することができる。
【0051】
例えば、図7に示す如く、振幅参照値AR1〜AR7および位相差参照値PR1〜PR7を、自動的に振幅参照値記憶手段18cおよび位相差参照値記憶手段18dに予め記憶させる初期設定部18fをCPU18に設けてもよい。
【0052】
初期設定部18fは、物体検知センサ1が検知領域の一端に設置された際等であって、検知領域内に物体が無いときに作動せしめられ、種々の初期設定をする。初期設定部18fは、外部から初期設定信号Tを受けた際、振幅平均値算出部18aが算出した振幅に関する平均値AA1〜AA7を、振幅参照値AR1〜AR7として振幅参照値記憶部18cに記憶させる。同様に、初期設定部18fは、外部から初期設定信号Tを受けた際、位相差平均値算出部18bが算出した位相差に関する平均値PA1〜PA7を、位相差参照値PR1〜PR7として位相差参照値記憶部18dに記憶させる。
【0053】
初期設定部18fはさらに、位相差参照値記憶部18dに記憶させた平均値PA1〜PA7の元データである位相差に関する減算値DP1〜DP7のばらつきをそれぞれ測定する。
【0054】
初期設定部18fは、表2に示す如く、振幅参照値記憶部18cに記憶させた平均値AA1〜AA7の元データである振幅に関する最大電圧値(振幅値)が所定範囲内にあるかどうかと、上記減算値DP1〜DP7のばらつきが所定範囲内にあるかどうかとに基づいて、各平均値AA1〜AA7,PA1〜PA7の各算出周期T2および/またはT3と、判定部18eが物体有無の判定に用いる第1の範囲および/または第2の範囲とを、自動的に設定する。
【0055】
【表2】
【0056】
つまり、初期設定部18fは、上記振幅値のいずれかが所定範囲外である場合、受光素子35が過大もしくは過小な反射光を受光しており、各初期設定を行なう環境にないとして初期設定を行なわず、エラー信号を生成する。なお、当該エラー信号が生成された場合は、異常な反射光を引き起こした要因が作業者によって取り除かれた後、再度初期設定信号Tが入力され、初期設定が実行される。
【0057】
一方、上記振幅値のいずれもが所定範囲内である場合であって、位相差に関する減算値DP1〜DP7の各ばらつきのいずれかが所定範囲外にある場合、初期設定部18fは、検知領域内が何らかの影響で位相差検出にばらつきを生じ易い環境になっていると認定する。そして、初期設定部18fは、この環境に対応すべく、平均値算出周期T2,T3を初期値よりも長くすると共に、第1の範囲,第2の範囲を初期値よりも広くする。
【0058】
上記のような初期設定部18fを備えた物体検知センサ1によれば、自動的に各参照値AR1〜AR7,PR1〜PR7を、各参照値記憶部18c,18dに記憶させることができる。
【0059】
また、初期設定部18fを備えた物体検知センサ1によれば、実際に設置された検知領域における他端の反射状況に応じて、平均値算出周期T2,T3ならびに物体有無判定のための第1の範囲,第2の範囲を最適かつ自動的に設定することができる。
【0060】
なお、上記変形例では、振幅値と、位相差に関する減算値のばらつきとに応じて、平均値算出周期および第1,第2の範囲を調整したが、振幅に関する最大電圧値の大きさのみに応じて調整してもよいし、位相差に関する減算値のばらつきのみに応じて調整してもよい。また、振幅に関する最大電圧値の大きさまたは位相差に関する減算値のばらつきに応じて、各平均値算出周期、第1の範囲および第2の範囲のいずれかを適宜選択して調整するようにしてもよい。
【0061】
また、投光素子33および受光素子35は、少なくとも1つあれば足り、検知領域の広さに応じて個数を適宜変更することができる。
【0062】
また、基準光を投光する投光素子34は、周囲温度による影響が無視できるような場合、省略することができる。
【図面の簡単な説明】
【0063】
【図1】本発明にかかる光位相差検出式の物体検知センサの一例を示す側面図である。
【図2】図1の物体検知センサの本体部を示す側断面図である。
【図3】図1の物体検知センサにおける光学素子の配置を示す底面図である。
【図4】図1の物体検知センサの回路構成を示すためのブロック図である。
【図5】図1の物体検知センサにおいて生成される投光信号のタイムチャートである。
【図6】図1の物体検知センサにおいて生成される位相差信号を示すための図である。
【図7】変形例にかかる光位相差検出式の物体検知センサのCPUを示すブロック図である。
【図8】従来の光位相差検出式の物体検知センサの欠点を説明するための図である。
【符号の説明】
【0064】
AA1〜AA7 振幅に関する平均値
AR1〜AR7 振幅参照値
PA1〜PA7 位相差に関する平均値
PR1〜PR7 位相差参照値
18a 振幅平均値算出手段(振幅平均値算出部)
18b 位相差平均値算出手段(位相差平均値算出部)
18e 判定手段(判定部)
50b〜57b 投光信号
70b〜77b、71c〜77c 受光信号
【特許請求の範囲】
【請求項1】
検知領域の一端に設置され、その検知領域における物体の有無を検知するセンサであって、
第1の周期ごとに生成される所定数の投光パルスを含む第1の投光信号に基づき、前記検知領域に向けて検出光を投光する第1の投光素子と、
前記検出光の前記検知領域からの反射光を受光して第1の受光信号を生成する受光素子と、
前記第1の周期ごとに前記第1の受光信号の振幅を測定すると共に、前記第1の周期の自然数倍からなる第2の周期ごとに前記振幅に関する平均値を算出する振幅平均値算出手段と、
前記検出光の前記検知領域の他端からの反射光を前記受光素子が受光したときに算出されるべき前記振幅に関する平均値を、振幅参照値として予め記憶した第1の記憶手段と
前記第1の周期ごとに前記第1の投光信号と前記第1の受光信号との第1の位相差を測定すると共に、前記第1の周期の自然数倍からなる第3の周期ごとに前記第1の位相差に関する平均値を算出する位相差平均値算出手段と、
前記検出光の前記検知領域の他端からの反射光を前記受光素子が受光したときに算出されるべき前記第1の位相差に関する平均値を、位相差参照値として予め記憶した第2の記憶手段と、
前記振幅に関する平均値と前記振幅参照値との差が第1の範囲外にある場合と、そうでない場合であって前記第1の位相差に関する平均値と前記位相差参照値との差が第2の範囲外にある場合とにおいて、前記検知領域内に物体が有ると判定する判定手段と、
を含んでなることを特徴とする光位相差検出式の物体検知センサ。
【請求項2】
前記振幅参照値および前記位相差参照値を自動的に前記第1および第2の記憶手段に予め記憶させる初期設定手段をさらに含んでいて、
前記初期設定手段は、外部からの初期設定信号に応じて、前記振幅平均値算出手段が算出した前記振幅に関する平均値を前記振幅参照値として前記第1の記憶手段に記憶させると共に、前記位相差平均値算出手段が算出した前記第1の位相差に関する平均値を前記位相差参照値として前記第2の記憶手段に記憶させるようになっていることを特徴とする請求項1に記載の光位相差検出式の物体検知センサ。
【請求項3】
前記初期設定手段は、前記第1の周期ごとに測定した前記振幅の値に応じて、前記第2の周期、前記第3の周期、前記第1の範囲および/または前記第2の範囲を自動的に決定するようになっていることを特徴とする請求項2に記載の光位相差検出式の物体検知センサ。
【請求項4】
前記初期設定手段は、前記第1の周期ごとに測定した前記第1の位相差のばらつきの程度に応じて、前記第2の周期、前記第3の周期、前記第1の範囲および/または前記第2の範囲を自動的に決定するようになっていることを特徴とする請求項2に記載の光位相差検出式の物体検知センサ。
【請求項5】
前記初期設定手段は、前記第1の周期ごとに測定した前記振幅の値が所定範囲内である場合、前記第1の周期ごとに測定した前記第1の位相差のばらつきの程度に応じて、前記第2の周期、前記第3の周期、前記第1の範囲および/または前記第2の範囲を自動的に決定し、そうでない場合、エラー信号を生成するようになっていることを特徴とする請求項2に記載の光位相差検出式の物体検知センサ。
【請求項6】
前記第1の投光素子および前記受光素子をそれぞれ複数個備え、
前記第1の投光信号は、前記各第1の投光素子に対してそれぞれ生成せしめられ、
前記各第1の投光素子は、前記各第1の投光信号に基づき、前記検出光を順次投光し、
前記受光素子は、前記各検出光について前記第1の受光信号をそれぞれ生成し、
前記振幅平均値算出手段は、前記第1の周期ごとに前記各第1の受光信号の振幅をそれぞれ測定すると共に、前記第2の周期ごとに前記各振幅に関する平均値をそれぞれ算出し、
前記第1の記憶手段は、前記各振幅に関する平均値についての前記振幅参照値をそれぞれ予め記憶し、
前記位相差平均値算出手段は、前記第1の周期ごとに前記各第1の投光信号と前記各第1の受光信号との前記第1の位相差をそれぞれ測定すると共に、前記第3の周期ごとに前記各第1の位相差に関する平均値をそれぞれ算出し、
前記第2の記憶手段は、前記各第1の位相差に関する平均値についての前記位相差参照値をそれぞれ予め記憶し、
前記判定手段は、前記各振幅に関する平均値と前記各振幅参照値との差のいずれかが前記第1の範囲外にある場合と、そうでない場合であって前記各第1の位相差に関する平均値と前記各位相差参照値との差のいずれかが前記第2の範囲外にある場合とにおいて、前記検知領域内に物体が有ると判定する、
ようになっていることを特徴とする請求項1〜5のいずれか1項に記載の光位相差検出式の物体検知センサ。
【請求項7】
前記受光素子の直近に固定配置された第2の投光素子であって、前記第1の周期ごとに所定数生成される投光パルスを含むと共に前記第1の投光信号と投光タイミングが重ならない第2の投光信号に基づき、前記受光素子に向けて基準光を投光するものをさらに備えていて、
前記受光素子はさらに、前記基準光を受光して第2の受光信号を生成し、
前記位相差平均値算出手段はさらに、前記第1の周期ごとに前記第2の投光信号と前記第2の受光信号との第2の位相差を測定すると共に、前記第1の位相差と前記第2の位相差との減算値に関する平均値を前記第3の周期ごとに算出し、
前記判定手段は、前記振幅平均値算出手段によって算出された前記振幅に関する平均値と前記振幅参照値との差が前記第1の範囲外にある場合と、そうでない場合であって前記位相差平均値算出手段によって算出された前記減算値に関する平均値と前記位相差参照値との差が前記第2の範囲外にある場合とにおいて、前記検知領域内に物体が有ると判定する、
ことを特徴とする請求項1〜6のいずれか1項に記載の光位相差検出式の物体検知センサ。
【請求項1】
検知領域の一端に設置され、その検知領域における物体の有無を検知するセンサであって、
第1の周期ごとに生成される所定数の投光パルスを含む第1の投光信号に基づき、前記検知領域に向けて検出光を投光する第1の投光素子と、
前記検出光の前記検知領域からの反射光を受光して第1の受光信号を生成する受光素子と、
前記第1の周期ごとに前記第1の受光信号の振幅を測定すると共に、前記第1の周期の自然数倍からなる第2の周期ごとに前記振幅に関する平均値を算出する振幅平均値算出手段と、
前記検出光の前記検知領域の他端からの反射光を前記受光素子が受光したときに算出されるべき前記振幅に関する平均値を、振幅参照値として予め記憶した第1の記憶手段と
前記第1の周期ごとに前記第1の投光信号と前記第1の受光信号との第1の位相差を測定すると共に、前記第1の周期の自然数倍からなる第3の周期ごとに前記第1の位相差に関する平均値を算出する位相差平均値算出手段と、
前記検出光の前記検知領域の他端からの反射光を前記受光素子が受光したときに算出されるべき前記第1の位相差に関する平均値を、位相差参照値として予め記憶した第2の記憶手段と、
前記振幅に関する平均値と前記振幅参照値との差が第1の範囲外にある場合と、そうでない場合であって前記第1の位相差に関する平均値と前記位相差参照値との差が第2の範囲外にある場合とにおいて、前記検知領域内に物体が有ると判定する判定手段と、
を含んでなることを特徴とする光位相差検出式の物体検知センサ。
【請求項2】
前記振幅参照値および前記位相差参照値を自動的に前記第1および第2の記憶手段に予め記憶させる初期設定手段をさらに含んでいて、
前記初期設定手段は、外部からの初期設定信号に応じて、前記振幅平均値算出手段が算出した前記振幅に関する平均値を前記振幅参照値として前記第1の記憶手段に記憶させると共に、前記位相差平均値算出手段が算出した前記第1の位相差に関する平均値を前記位相差参照値として前記第2の記憶手段に記憶させるようになっていることを特徴とする請求項1に記載の光位相差検出式の物体検知センサ。
【請求項3】
前記初期設定手段は、前記第1の周期ごとに測定した前記振幅の値に応じて、前記第2の周期、前記第3の周期、前記第1の範囲および/または前記第2の範囲を自動的に決定するようになっていることを特徴とする請求項2に記載の光位相差検出式の物体検知センサ。
【請求項4】
前記初期設定手段は、前記第1の周期ごとに測定した前記第1の位相差のばらつきの程度に応じて、前記第2の周期、前記第3の周期、前記第1の範囲および/または前記第2の範囲を自動的に決定するようになっていることを特徴とする請求項2に記載の光位相差検出式の物体検知センサ。
【請求項5】
前記初期設定手段は、前記第1の周期ごとに測定した前記振幅の値が所定範囲内である場合、前記第1の周期ごとに測定した前記第1の位相差のばらつきの程度に応じて、前記第2の周期、前記第3の周期、前記第1の範囲および/または前記第2の範囲を自動的に決定し、そうでない場合、エラー信号を生成するようになっていることを特徴とする請求項2に記載の光位相差検出式の物体検知センサ。
【請求項6】
前記第1の投光素子および前記受光素子をそれぞれ複数個備え、
前記第1の投光信号は、前記各第1の投光素子に対してそれぞれ生成せしめられ、
前記各第1の投光素子は、前記各第1の投光信号に基づき、前記検出光を順次投光し、
前記受光素子は、前記各検出光について前記第1の受光信号をそれぞれ生成し、
前記振幅平均値算出手段は、前記第1の周期ごとに前記各第1の受光信号の振幅をそれぞれ測定すると共に、前記第2の周期ごとに前記各振幅に関する平均値をそれぞれ算出し、
前記第1の記憶手段は、前記各振幅に関する平均値についての前記振幅参照値をそれぞれ予め記憶し、
前記位相差平均値算出手段は、前記第1の周期ごとに前記各第1の投光信号と前記各第1の受光信号との前記第1の位相差をそれぞれ測定すると共に、前記第3の周期ごとに前記各第1の位相差に関する平均値をそれぞれ算出し、
前記第2の記憶手段は、前記各第1の位相差に関する平均値についての前記位相差参照値をそれぞれ予め記憶し、
前記判定手段は、前記各振幅に関する平均値と前記各振幅参照値との差のいずれかが前記第1の範囲外にある場合と、そうでない場合であって前記各第1の位相差に関する平均値と前記各位相差参照値との差のいずれかが前記第2の範囲外にある場合とにおいて、前記検知領域内に物体が有ると判定する、
ようになっていることを特徴とする請求項1〜5のいずれか1項に記載の光位相差検出式の物体検知センサ。
【請求項7】
前記受光素子の直近に固定配置された第2の投光素子であって、前記第1の周期ごとに所定数生成される投光パルスを含むと共に前記第1の投光信号と投光タイミングが重ならない第2の投光信号に基づき、前記受光素子に向けて基準光を投光するものをさらに備えていて、
前記受光素子はさらに、前記基準光を受光して第2の受光信号を生成し、
前記位相差平均値算出手段はさらに、前記第1の周期ごとに前記第2の投光信号と前記第2の受光信号との第2の位相差を測定すると共に、前記第1の位相差と前記第2の位相差との減算値に関する平均値を前記第3の周期ごとに算出し、
前記判定手段は、前記振幅平均値算出手段によって算出された前記振幅に関する平均値と前記振幅参照値との差が前記第1の範囲外にある場合と、そうでない場合であって前記位相差平均値算出手段によって算出された前記減算値に関する平均値と前記位相差参照値との差が前記第2の範囲外にある場合とにおいて、前記検知領域内に物体が有ると判定する、
ことを特徴とする請求項1〜6のいずれか1項に記載の光位相差検出式の物体検知センサ。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2009−168605(P2009−168605A)
【公開日】平成21年7月30日(2009.7.30)
【国際特許分類】
【出願番号】特願2008−6729(P2008−6729)
【出願日】平成20年1月16日(2008.1.16)
【出願人】(000210425)竹中電子工業株式会社 (11)
【出願人】(000101318)株式会社タケックス研究所 (9)
【Fターム(参考)】
【公開日】平成21年7月30日(2009.7.30)
【国際特許分類】
【出願日】平成20年1月16日(2008.1.16)
【出願人】(000210425)竹中電子工業株式会社 (11)
【出願人】(000101318)株式会社タケックス研究所 (9)
【Fターム(参考)】
[ Back to top ]