
分散電源の単独運転検出装置
【課題】次数間電流注入方式の単独運転検出装置において、系統擾乱発生時の不要動作防止と、単独運転の高速検出とを両立させる。
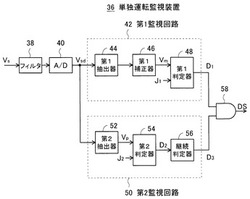
【解決手段】単独運転監視装置36は、連系点電圧Vsから、注入次数の高調波成分、その上側、下側次数成分を抽出する第1抽出器44と、注入次数の電圧Vmを抽出する第1補正器46と、当該電圧Vmを判定値J1と比較して分散電源の単独運転を検出して信号D1を出力する第1判定器48とを有する第1監視回路42を備えている。更に、連系点電圧Vsから、補助次数の電圧Vpを抽出する第2抽出器52と、当該電圧Vpを判定値J2と比較して分散電源の単独運転を検出して信号D2を出力する第2判定器54と、この信号D2の継続を判定して信号D3を出力する継続判定器56とを有する第2監視回路50と、信号D1及びD3のANDを取って単独運転検出信号DSを出力する論理積回路58とを備えている。
【解決手段】単独運転監視装置36は、連系点電圧Vsから、注入次数の高調波成分、その上側、下側次数成分を抽出する第1抽出器44と、注入次数の電圧Vmを抽出する第1補正器46と、当該電圧Vmを判定値J1と比較して分散電源の単独運転を検出して信号D1を出力する第1判定器48とを有する第1監視回路42を備えている。更に、連系点電圧Vsから、補助次数の電圧Vpを抽出する第2抽出器52と、当該電圧Vpを判定値J2と比較して分散電源の単独運転を検出して信号D2を出力する第2判定器54と、この信号D2の継続を判定して信号D3を出力する継続判定器56とを有する第2監視回路50と、信号D1及びD3のANDを取って単独運転検出信号DSを出力する論理積回路58とを備えている。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、分散電源を有する分散電源保有設備が配電系統に接続された構成のシステムに適用されるものであって、当該分散電源保有設備内の分散電源が単独運転になったことを検出する単独運転検出装置に関する。
【背景技術】
【0002】
分散電源が単独運転になったことを検出する方式には、大別して、受動的方式および能動的方式がある(例えば非特許文献1参照)。
【0003】
能動的方式に属するものとして、分散電源保有設備から配電系統に当該配電系統の基本波の1倍よりも大きい非整数倍の注入周波数(換言すれば、注入次数。以下同様)の注入電流(換言すれば、次数間電流)を注入する電流注入装置と、分散電源保有設備と配電系統との連系点における電圧を測定して当該注入周波数の電圧を用いて、分散電源が単独運転になったことを検出する単独運転監視装置とを備えている単独運転検出装置が、従来から種々提案されている。この方式を、次数間電流注入方式と呼ぶことにする。
【0004】
例えば、特許文献1には、各分散電源保有設備から、上記のような注入周波数であってうなりを生じさせる二つの注入周波数(例えば2.6次および2.8次等)の注入電流を配電系統に注入し、かつうなりを同期させ、そして自設備の連系点における電圧に含まれている注入周波数電圧の増大から、自設備内の分散電源の単独運転を検出する単独運転検出装置が記載されている。
【0005】
この特許文献1に記載の単独運転検出装置を構成する単独運転監視装置の一例を図1に示す。
【0006】
この単独運転監視装置200は、連系点の電圧Vs から、離散フーリエ変換器202、204によって上記二つの注入周波数の電圧V21(例えば2.6次)、V22(例えば2.8次)をそれぞれ抽出し、それらの絶対値を絶対値演算器206、208によってそれぞれ演算し、判定器210、212によって各絶対値|V21|、|V22|を所定の判定値J21、J22とそれぞれ比較して前者が後者以上のときに検出信号S21、S22をそれぞれ出力するよう構成されている。更に、両検出信号S21、S22が共に出力されているときにAND回路214から検出信号S23を出力し、この検出信号S23が所定の継続確認時間継続すると継続判定器216から単独運転検出信号DSを出力するよう構成されている。
【0007】
特許文献2、非特許文献2については後述する。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開2009−11142号公報(段落0234−0243、図1−図2、図21)
【特許文献2】特開2002−40067号公報(段落0002−0011)
【非特許文献】
【0009】
【非特許文献1】「系統連系規程」、JEAC 9701−2006、社団法人日本電気協会 系統連系専門部会、平成18年8月30日第4版第2刷発行、頁44−50
【非特許文献2】「単独運転検出およびFRTへの取り組みについて」、(独)新エネルギー・産業技術総合開発機構(NEDO)、(経済産業省、次世代送配電システム制度検討会第1回第1ワーキンググループ、平成22年6月8日、経済産業省本館17階国際会議室における配付資料8)
【発明の概要】
【発明が解決しようとする課題】
【0010】
上記特許文献1に記載の単独運転検出装置を含めて、上記のような注入周波数の電流を注入し、かつ当該注入周波数の電圧を測定して単独運転検出を行うという次数間電流注入方式の単独運転検出装置は、配電系統の基本波とは異なる周波数を利用するので、他の能動方式(例えば、上記非特許文献1に記載の無効電力変動方式、周波数シフト方式等)の単独運転検出装置に比べて、定常的に基本波の影響を受けない、単独運転の高速検出性能に優れている等の特長を有しているけれども、瞬時電圧低下(以下「瞬低」と略称する)や系統周波数変動のような系統擾乱発生時に、不要動作(即ち、単独運転発生ではなく本来は検出すべきでないのに誤検出すること)を起こしやすい、という点になお改善の余地がある。
【0011】
その理由を簡単に説明すると、連系点電圧Vs を離散フーリエ変換した出力(即ち離散フーリエ変換器202、204の出力)には、瞬低発生によって、見かけ上のバックグラウンドノイズが含まれることになり、このバックグラウンドノイズは上記注入周波数付近でも大きな値を有していて、上記注入電流による注入周波数の電圧が当該バックグラウンドノイズに埋もれてしまうことが起こり、それによって上記不要動作を起こす。
【0012】
また、連系点電圧の測定を、サンプリング周波数が一定である固定周波数サンプリング方式で行っていると、離散フーリエ変換器202、204の出力には系統周波数変動によるリーケージエラーが含まれることになり、それによって上記注入周波数成分の抽出が乱されるので、上記不要動作を起こす原因となる。このようなリーケージエラーによる抽出誤差については、例えば、前記特許文献2(例えば段落0002−0006参照)にも記載されている。
【0013】
即ち、瞬低や系統周波数変動のような系統擾乱発生時に不要動作を起こさないことは、例えば前記非特許文献2においてFRT(Fault Ride Through)要件と呼ばれているように、単独運転検出において必要な要件であるが、上記のような従来の次数間電流注入方式の単独運転検出装置では、FRT要件と単独運転の高速検出とを両立させることが難しい、という点になお改善の余地がある。
【0014】
そこでこの発明は、上記のような次数間電流注入方式の単独運転検出装置において、系統擾乱(瞬低および周波数変動)発生時の不要動作防止と、単独運転の高速検出とを両立させることを主たる目的としている。
【課題を解決するための手段】
【0015】
この発明に係る単独運転検出装置の一つは、
分散電源を有する分散電源保有設備が配電系統に接続された構成のシステムに適用されるものであって、
前記分散電源保有設備側から前記配電系統に、当該配電系統の基本波の1倍よりも大きい非整数倍の注入次数の注入電流を注入する電流注入装置と、
前記分散電源保有設備と前記配電系統との連系点における前記注入次数の電圧を測定して当該注入次数の電圧を用いて、前記分散電源が単独運転になったことを検出して単独運転検出信号を出力する単独運転監視装置とを備えている単独運転検出装置において、
前記単独運転監視装置は、
(1)(a)前記連系点における電圧から、離散フーリエ変換によって、前記注入次数の高調波成分、前記注入次数の上側の非整数次数の上側次数成分および前記注入次数の下側の非整数次数の下側次数成分をそれぞれ抽出する第1抽出器と、
(b)前記第1抽出器で抽出した前記上側次数成分および下側次数成分の重みつき平均から、前記抽出した注入次数の高調波成分に含まれる前記配電系統の基本波成分に基づく誤差を補間演算し、かつ前記抽出した注入次数の高調波成分から当該誤差を減算して除去して、前記注入次数の電圧を抽出する第1補正器と、
(c)前記第1補正器から与えられる前記注入次数の電圧を所定の判定値と比較して、前記分散電源が単独運転になったことを検出して第1検出信号を出力する第1判定器とを有している第1監視回路と、
(2)(a)前記連系点における電圧から、離散フーリエ変換によって、前記注入次数±1次の範囲内にありかつ奇数次を除く次数である補助次数の電圧を、前記第1抽出器における計測期間よりも短い計測期間で抽出する第2抽出器と、
(b)前記第2抽出器から与えられる前記補助次数の電圧を所定の判定値と比較して、前記分散電源が単独運転になったことを検出して第2検出信号を出力する第2判定器と、
(c)前記第2判定器から与えられる前記第2検出信号が所定の継続確認時間継続したときに第3検出信号を出力する継続判定器とを有している第2監視回路と、
(3)前記第1監視回路から与えられる前記第1検出信号と前記第2監視回路から与えられる前記第3検出信号の論理積を取って前記単独運転検出信号を出力する論理積回路とを備えている、ことを特徴としている。
【0016】
この単独運転検出装置においては、第1監視回路を構成する第1抽出器および第1補正器によって、抽出した注入次数の高調波成分から配電系統の基本波成分に基づく誤差を除去することができるので、即ちリーケージエラーを小さくすることができるので、第1監視回路による単独運転検出において、系統周波数変動時の不要動作を防止することができる。
【0017】
第2監視回路で扱う上記補助次数は注入次数に近いので、単独運転発生時に補助次数の電圧は、注入次数の電圧と同じ方向に変化する。しかもこの補助次数には、短い計測期間で配電系統の基本波と分離することのできる次数を選択することができるので、これを用いることによって、第2抽出器によって第1抽出器よりも短い計測期間で補助次数の電圧を抽出することができる。従って、第2抽出器の応答速度を速くして、配電系統における過渡変動の発生・終了に対して高速に応答することができる。更に、継続判定器における継続確認時間によって、瞬低状態と単独運転状態とを区別することができる。これらによって、第2監視回路によって、瞬低発生時に不要動作を起こすことなく、単独運転を高速検出することができる。
【0018】
しかし、第2抽出器における計測期間を短くすると、それによって周波数分解能が低下して、系統周波数変動時のリーケージエラーが大きくなるので、第2監視回路は、系統周波数変動時に不要動作を起こす可能性がある。
【0019】
そこで、論理積回路によって、上記第1監視回路からの第1検出信号と第2監視回路からの第3検出信号との論理積を取ることにしており、これによって、系統擾乱(瞬低および周波数変動)発生時の不要動作防止と、単独運転の高速検出とを両立させることができる。
【0020】
前記注入次数を2次より大かつ3次より小にし、その場合の前記補助次数を2次または2.5次にしても良い。
【0021】
前記第2判定器は、(a)前記第2抽出器から与えられる前記補助次数の電圧について、現時点よりも前記配電系統の基本波の整数倍サイクル前の値と現時点の値との差分を算出する差分算出器と、(b)前記差分算出器から与えられる前記差分を所定の判定値と比較して、前者が後者以上のときに前記第2検出信号を出力する比較器とを有しているものでも良い。
【0022】
前記第2判定器において、前記第2抽出器から与えられる補助次数の電圧について、互いに異なる時間差の差分を直列に2回算出する2階差分を複数用いても良い。
【0023】
前記第1監視回路において、注入次数の電圧による判定の代わりに、連系点から見た配電系統の注入次数のアドミタンスまたはインピーダンスを求めて、それで分散電源が単独運転になったことを判定するようにしても良い。
【発明の効果】
【0024】
請求項1に記載の発明によれば、系統周波数変動時の不要動作を防止することができる第1監視回路と、瞬低発生時に不要動作を起こすことなく単独運転を高速検出することができる第2監視回路と、第1監視回路からの第1検出信号と第2監視回路からの第3検出信号との論理積を取る論理積回路とを備えているので、系統擾乱(瞬低および周波数変動)発生時の不要動作防止と、単独運転の高速検出とを両立させることができる。
【0025】
請求項2に記載の発明によれば次の更なる効果を奏する。即ち、補助次数を2次にすることによって、第2抽出器における計測期間を配電系統の基本波の1サイクル分の期間にすることができるので、第2抽出器の応答速度をより速くすることができる。その結果、配電系統における過渡変動の発生・終了に対してより高速に応答することができるので、その分、継続判定器における継続確認時間を短くすることができ、これらによって、第2監視回路において、瞬低状態と単独運転状態とをより短時間で区別することができる。ひいては、第2監視回路によって、瞬低発生時に不要動作を起こすことなく、単独運転をより高速で検出することができる。
【0026】
請求項3に記載の発明によれば次の更なる効果を奏する。即ち、半波加算コムフィルタによって配電系統の偶数次高調波成分のみを抽出することができるので、半波離散フーリエ変換器によって2次である補助次数の電圧を正しく分離して抽出することができる。その結果、半波加算コムフィルタおよび半波離散フーリエ変換器における合計の計測期間を配電系統の基本波の0.75サイクル分の期間にすることができるので、請求項2の場合に比べて、第2抽出器の応答速度をより速くすることができる。その結果、配電系統における過渡変動の発生・終了に対してより高速に応答することができるので、その分、継続判定器における継続確認時間を短くすることができ、これらによって、第2監視回路において、瞬低状態と単独運転状態とをより短時間で区別することができる。ひいては、第2監視回路によって、瞬低発生時に不要動作を起こすことなく、単独運転をより高速で検出することができる。
【0027】
請求項4に記載の発明によれば次の更なる効果を奏する。即ち、補助次数の2.5次は次数間高調波(即ち非整数倍次数の高調波)であるので、系統健全時の配電系統における電圧含有率が小さい。従って、第2判定器における判定が容易になる。しかも、補助次数を2.5次にすることによって、第2抽出器における計測期間を配電系統の基本波の2サイクル分の期間にすることができるので、第2抽出器の応答速度を速くすることができる。その結果、配電系統における過渡変動の発生・終了に対して高速に応答することができるので、その分、継続判定器における継続確認時間を短くすることができ、これらによって、第2監視回路において、瞬低状態と単独運転状態とを短時間で区別することができる。ひいては、第2監視回路によって、瞬低発生時に不要動作を起こすことなく、単独運転を高速で検出することができる。
【0028】
請求項5に記載の発明によれば次の更なる効果を奏する。即ち、補助次数の電圧レベルそのものよりも、当該電圧の所定時間前との差分(換言すれば変化分)の方が、単独運転発生時の変化がより速くかつより大きくなるので、単独運転発生をより速く判定して単独運転検出をより高速化することができる。
【0029】
請求項6に記載の発明によれば次の更なる効果を奏する。即ち、連系点電圧の測定を固定周波数サンプリング方式で行っている場合でも、定常状態において系統周波数および/または注入周波数(注入次数)が定格からブレた場合に、第2判定器から第2検出信号が出力されるのを防止することができるので、当該ブレによって不要動作が起こることを防止することができる。
【図面の簡単な説明】
【0030】
【図1】従来の単独運転検出装置を構成する単独運転監視装置の一例を示すブロック図である。
【図2】この発明に係る単独運転検出装置を有する分散電源保有設備が配電系統に接続された構成のシステムの一例を示す単線接続図である。
【図3】図2中の分散電源保有設備の構成の一例を示すブロック図である。
【図4】図3中の単独運転監視装置の構成の一例を示すブロック図である。
【図5】図4中の第1抽出器および第1補正器の構成の一例を示すブロック図である。
【図6】配電系統の基本波のリーケージエラーを除去する動作の一例を説明するための図である。
【図7】図4中の第1判定器の構成の一例を示すブロック図である。
【図8】第1監視回路の他の例を示すブロック図である。
【図9】図4中の第2抽出器を構成する回帰型離散フーリエ変換器の構成の一例を示すブロック図である。
【図10】図4中の第2判定器および継続判定器の構成の一例を示すブロック図である。
【図11】単独運転発生時をシミュレーションしたときの図4、図8、図10中の各部の信号の一例を示す図であり、図12へ続く。
【図12】単独運転発生時をシミュレーションしたときの図4、図8、図10中の各部の信号の一例を示す図であり、図11から続く。
【図13】瞬低発生時をシミュレーションしたときの図4、図8、図10中の各部の信号の一例を示す図であり、図14へ続く。
【図14】瞬低発生時をシミュレーションしたときの図4、図8、図10中の各部の信号の一例を示す図であり、図13から続く。
【図15】単独運転と瞬低の同時発生時をシミュレーションしたときの図4、図8、図10中の各部の信号の一例を示す図であり、図16へ続く。
【図16】単独運転と瞬低の同時発生時をシミュレーションしたときの図4、図8、図10中の各部の信号の一例を示す図であり、図15から続く。
【図17】ランプ状の周波数変動発生時をシミュレーションしたときの図4、図8、図10中の各部の信号の一例を示す図であり、図18へ続く。
【図18】ランプ状の周波数変動発生時をシミュレーションしたときの図4、図8、図10中の各部の信号の一例を示す図であり、図17から続く。
【図19】ステップ状の周波数変動発生時をシミュレーションしたときの図4、図8、図10中の各部の信号の一例を示す図であり、図20へ続く。
【図20】ステップ状の周波数変動発生時をシミュレーションしたときの図4、図8、図10中の各部の信号の一例を示す図であり、図19から続く。
【図21】図4中の第2抽出器の構成の他の例を示すブロック図である。
【図22】図4中の第2判定器の構成の他の例を示すブロック図である。
【図23】第1監視回路の更に他の例を示すブロック図である。
【発明を実施するための形態】
【0031】
(1)第1の実施形態
図2に、この発明に係る単独運転検出装置30を有する複数の分散電源保有設備20が配電系統1に接続されている構成のシステムの一例を示し、図3に、図2中の分散電源保有設備20の構成の一例を示す。
【0032】
各分散電源保有設備20内の単独運転検出装置30は、前述した次数間電流注入方式に属するものである。より具体的には、この実施形態ではうなりを利用するものであり、簡単に言えば、当該単独運転検出装置30の基本的な構成および図2に示すシステムの構成は、前記特許文献1に記載されているのと同様のものである。但し、単独運転検出装置30内の単独運転監視装置36の構成は異なる。
【0033】
図2に示すシステム(これは、分散電源連系システムと呼ぶこともできる)の構成は次のとおりである。なお、以下においては、自分の分散電源保有設備20を自設備20、当該自設備20が属する方の群を自群、属さない方の群を他群と呼んでいる。
【0034】
分散電源(図3中の分散電源28参照)をそれぞれ有する複数の分散電源保有設備20が第1群と第2群との2群に分類されて配電系統1に接続されている。
【0035】
配電系統1は、この例では、上位系統2に変電所4の変圧器6および遮断器8を介して高圧配電線10が接続され、この高圧配電線10に配電用変圧器14を介して低圧配電線16が接続された構成をしていて、この低圧配電線16に各分散電源保有設備20が接続されている。高圧配電線10には、負荷11および力率改善用コンデンサ12が接続されている。高圧配電線10の電圧は例えば6.6kV、低圧配電線16の電圧は例えば200Vである。
【0036】
各分散電源保有設備20は、図3に示すように、分散電源28、スイッチ22および単独運転検出装置30を有している。符号18は、当該分散電源保有設備20と配電系統1(具体的にはその低圧配電線16)との連系点である。
【0037】
単独運転検出装置30は、配電系統1(具体的にはその低圧配電線16)に後述する注入周波数の注入電流Iinj を注入する電流注入装置32と、うなりの同期制御を行う同期制御装置34と、自設備20内の分散電源28の単独運転を検出して単独運転検出信号DSを出力する単独運転監視装置36とを有している。
【0038】
このシステムでは、数1、表1にも示すように、うなりを生じさせる二つの注入周波数からそれぞれ成る2組の注入周波数であって、各組を成す二つの注入周波数間の周波数差Δfは両組で互いに同じであり、かつ両組を構成する四つの注入周波数f11、f12、f21、f22はそれぞれ異なると共に配電系統1の基本波周波数とも異なる第1組および第2組の注入周波数を用いる。各注入周波数は、配電系統1の基本波周波数の1倍よりも大きい非整数倍(即ち帯小数倍)の周波数にしている。
【0039】
[数1]
|f11−f12|=|f21−f22|=Δf
f11≠f12≠f21≠f22
【0040】
【表1】

【0041】
なお、この出願では、符号に添字11を有する物理量(周波数、電圧、電流等)と添字12を有する物理量とが第1組を示し、添字21を有する物理量と添字22を有する物理量とが第2組を示している。例えば、上記四つの周波数f11、f12、f21、f22は、それぞれ、110Hz(2.2次)、120Hz(2.4次)、130Hz(2.6次)、140Hz(2.8次)である。括弧内は、配電系統1の基本波(例えば50Hz=1次)に対する次数で表したものである。以下における例では、全て、ここに例示した周波数(次数)を用いている。但しこれに限られるものではない。
【0042】
この明細書においては、注入周波数の代わりに注入次数を用いて表現している場合もあるが、両者は等価である。
【0043】
第1群に属する分散電源保有設備20内の単独運転検出装置30を構成する電流注入装置32は、第1組の注入周波数の電流組I11、I12を含む注入電流Iinj を配電系統1に注入し、単独運転監視装置36は、他群の(即ち上記第2組の)注入周波数の電圧V21、V22、自群の(即ち上記第1組の)注入周波数の電圧V11、V12の内の少なくとも一つの電圧を測定して上記単独運転を検出する。
【0044】
第2群に属する分散電源保有設備20内の単独運転検出装置30を構成する電流注入装置32は、第2組の注入周波数の電流組I21、I22を含む注入電流Iinj を配電系統1に注入し、単独運転監視装置36は、他群の(即ち上記第1組の)注入周波数の電圧V11、V12、自群の(即ち上記第2組の)注入周波数の電圧V21、V22の内の少なくとも一つの電圧を測定して上記単独運転を検出する。
【0045】
同期制御装置34は、自設備20から注入する注入電流Iinj を構成する電流組の各電流の位相を、当該注入電流Iinj が生じさせるうなりである自設備うなりの位相に対して同一群内で共通した一定の位相関係に保つと共に、当該自設備うなりを、他群に属する分散電源保有設備20から注入する注入電流Iinj の総体が生じさせる電圧のうなりである他群うなりに同期させる。
【0046】
上記電流注入装置32および同期制御装置34の具体的な構成としては、例えば上記特許文献1、特開2010−166759号公報、特開2011−36066号公報等に記載されているような公知の技術を利用することができる。
【0047】
単独運転監視装置36の具体的な構成の例を、第1群の分散電源保有設備20用のものを例にして以下に詳述する。第2群の分散電源保有設備20用の単独運転監視装置36も、周波数の組が反対になる以外は、以下に説明するものと同様である。
【0048】
以下においては、前記注入周波数に相当する注入次数mを用いて説明する。即ち、注入次数mは、配電系統1の基本波の1倍よりも大きい非整数倍次数であり、例えば、前述したように、2.2次、2.4次、2.6次、2.8次の一つまたは複数である。
【0049】
図4に示すように、単独運転監視装置36は、アナログフィルタ38、A/D変換器40、第1監視回路42、第2監視回路50および論理積回路58を備えている。この単独運転監視装置36は、連系点18の電圧Vs の測定を、サンプリング周波数が一定である固定周波数サンプリング方式で行うものである。
【0050】
アナログフィルタ38は、ディジタル処理用にサンプリングを行う際の折り返し雑音(エイリアシング)防止用等のバンドパスフィルタであり、第1監視回路42において用いる注入次数mおよび第2監視回路50において用いる補助次数pの信号を通過させる。このアナログフィルタ38は必須のものではないけれども、それを設ける方が好ましい。
【0051】
A/D変換器40は、アナログ信号をディジタル信号に変換して、連系点電圧Vs に相当するディジタルの電圧Vsdを出力する。
【0052】
第1監視回路42は、第1抽出器44、第1補正器46および第1判定器48を備えている。
【0053】
第1抽出器44は、連系点電圧Vs から、より具体的にはそれをディジタルに変換した電圧Vsdから、離散フーリエ変換によって、注入次数mの高調波成分、注入次数mの上側の非整数次数の上側次数成分および注入次数mの下側の非整数次数の下側次数成分をそれぞれ抽出するものである。
【0054】
第1補正器46は、第1抽出器44で抽出した上側次数成分および下側次数成分の重みつき平均から、前記抽出した注入次数mの高調波成分に含まれる配電系統1の基本波成分に基づく誤差を補間演算し、かつ前記抽出した注入次数mの高調波成分から当該誤差を減算して除去して、前記注入次数mの電圧Vm を抽出するものである。
【0055】
第1判定器48は、第1補正器46から与えられる注入次数の電圧Vm を所定の判定値J1 と比較して、前記分散電源28が単独運転になったことを検出して第1検出信号D1 を出力するものである。
【0056】
なお、第1監視回路42は、図4では一つの注入次数mを扱う場合の例を示しているが、上記第1抽出器44、第1補正器46および第1判定器48をそれぞれ2以上ずつ設けて、2以上の互いに異なる注入次数mを扱うようにしても良い。例えば、後述する図8は、四つの注入次数mを扱う場合の例である。
【0057】
第1抽出器44および第1補正器46の構成の一例を図5に示す。
【0058】
第1抽出器44は、図5に示す例では、上記注入次数mの高調波成分Vm を抽出する離散フーリエ変換器60と、注入次数mの上側の(即ち注入次数mよりも少し大きい)非整数倍次数n1(例えばn1=m+0.1)の上側次数成分Vn1を抽出する離散フーリエ変換器62と、注入次数mの下側の(即ち注入次数mよりも少し小さい)非整数倍次数n2(例えばn2=m−0.1)の下側次数成分Vn2を抽出する離散フーリエ変換器64とを有している。
【0059】
各離散フーリエ変換器60、62、64には、例えば、図9に示す第2抽出器と同様の構成の回帰型離散フーリエ変換器を用いても良い。
【0060】
第1補正器46は、図5に示す例では、離散フーリエ変換器62、64からの信号をそれぞれ1/2倍して出力する演算器66、68と、離散フーリエ変換器60からの信号から両演算器66、68からの信号を減算することによって、次式の演算を行って、電圧Vc を出力する演算器70とを有している。この数2の右辺第2項は、上側次数成分Vn1および下側次数成分Vn2に共に1の重みをつけて平均を求める場合の例である。即ちこの場合は、通常の平均(相加平均)を求めることであり、この出願においては、重みつき平均には、その一態様として、通常の相加平均も含んでいる。
【0061】
[数2]
Vc =Vm −(Vn1+Vn2)/2
【0062】
上記構成によって、上記抽出した注入次数mの高調波成分Vm から、配電系統1の基本波成分に基づく誤差を除去することができる。
【0063】
これを図6を参照して説明する。上記注入次数m付近まで、配電系統1の基本波のリーケージエラーEが及んでいるものとする。上記上側次数n1、下側次数n2は注入次数mを挟んでおりかつ注入次数mに近いので、リーケージエラーEは、当然、上側次数n1および下側次数n2にも及んでおり、また上側次数n1と下側次数n2との間ではぼ線形変化すると考えても良い。各次数m、n1、n2におけるリーケージエラーEの大きさをそれぞれEm 、En1、En2とする。
【0064】
注入次数mのリーケージエラーEの大きさEm は、例えば次式の補間演算によって求めることができる。この式は、上記数2と同様に、リーケージエラーEn1およびEn2に共に1の重みをつけて平均を求める場合の例である。このEm が、注入次数mの高調波成分Vm に含まれる、配電系統1の基本波成分に基づく誤差である。
【0065】
[数3]
Em ≒(En1+En2)/2
【0066】
従って、上記のようなリーケージエラーEを含めて考えると、上記数2は次式で表すことができる。
【0067】
[数4]
Vc =(Vm +Em )−(En1+En2)/2
≒Vm
【0068】
この数4の第1行右辺第2項がリーケージエラーEn1、En2のみになっているのは、上側次数n1および下側次数n2は前述したように非整数次数であるのに対して、配電系統1の高調波成分は基本的に整数次(より具体的には奇数次)のみであって、上側次数n1および下側次数n2には存在しないので、上側次数n1および下側次数n2ではリーケージエラーEのみになり、これが上側次数成分Vn1および下側次数成分Vn2として抽出されるからである。この数4の第1行に数3を適用すると第2行となる。
【0069】
この数4から分かるように、離散フーリエ変換器64によって注入次数mの高調波成分Vm と共に抽出されるリーケージエラーEm を第1補正器46によって除去して、注入次数mの電圧Vm を正しく抽出してそれを電圧Vc として出力することができる。従って、固定周波数サンプリング方式を採用していても、リーケージエラーを小さくすることができる。
【0070】
なお、重みつき平均を求める場合の重みは、上側次数成分Vn1側と下側次数成分Vn2側とで互いに異ならせても良い。上記注入次数mと上側次数n1および下側次数n2との関係等に応じて決めれば良い。
【0071】
(a)第1抽出器44(具体的にはそれを構成する離散フーリエ変換器60、62、64)における計測期間は、後述する第2抽出器(具体的にはそれを構成する離散フーリエ変換器)における計測期間に比べて長くすることができる。高速応答性は第2監視回路50に任せているからである。例えば、この実施例では、第1抽出器44における計測期間は、系統基本波の10サイクル分の期間にしている。離散フーリエ変換器における計測期間は、所望周波数(所望次数)の電圧を他の次数電圧と正しく分離して抽出するためには、基本波周波数の整数倍である必要があるが、計測期間を10サイクルのように長くすると周波数分解能が高くなるため、第1抽出器44の特性上、系統の周波数変動によるリーケージエラーが小さくなる。但しこれと交換に、応答が遅くなるために、系統が正常に戻っても過渡変動の影響が長時間残ることになる。
【0072】
(b)更に、上述した第1抽出器44および第1補正器46による補正によって、計測期間が同じでも、リーケージエラーを小さくすることができる。
【0073】
上記(a)および(b)の理由によって、第1監視回路42による単独運転検出において、系統周波数変動時の不要動作(誤検出)を防止することができる。
【0074】
第1判定器48の構成の一例を図7に示す。この第1判定器48は、第1補正器46から与えられる注入次数mの電圧Vm の変化分ΔVm を判定する場合の例であり、絶対値演算器72、移動平均回路74、演算器76および比較器78を備えている。
【0075】
絶対値演算器72は、第1補正器46から与えられる注入次数mの電圧Vm の絶対値|Vm |を演算して出力する。
【0076】
移動平均回路74は、絶対値演算器72から与えられる絶対値|Vm |について、現在より過去における所定時間の移動平均Vmaを算出する。例えば、現在より1秒過去における1秒間の移動平均Vmaを算出する。
【0077】
演算器76は、上記絶対値|Vm |の変化分ΔVm を、次式に従って演算して出力する。即ち、変化分ΔVm は、この例では、Vmaに対する|Vm |の比率である。
【0078】
[数5]
ΔVm =|Vm |/Vma
【0079】
比較器78は、演算器76から与えられる変化分ΔVm を所定の判定値J1 と比較して、前者ΔVm が後者J1 以上のときに、前記第1検出信号D1 を出力する。判定値J1 は、系統健全時の上記変化分ΔVm と単独運転時の上記変化分ΔVm との間の値にしておけば良い。後述する判定値J1a、J1bについても同様である。
【0080】
図8は、前述したように、四つの注入次数mを扱う場合の第1監視回路42の例であり、図4〜図7に示した構成の第1抽出器44、第1補正器46、第1判定器48を四つずつと、論理積回路49とを備えている。各第1判定器48は、上記第1検出信号D1 の代わりに、検出信号S11〜S14をそれぞれ出力する。
【0081】
図8中の上2段の回路は、前述した自群の注入次数の電圧V11(2.2次)、V12(2.4次)をそれぞれ抽出し、それの変化分ΔV11、ΔV12を所定の判定値J1aとそれぞれ比較して、検出信号S11、S12をそれぞれ出力するものである。
【0082】
図8中の下2段の回路は、前述した他群の注入次数の電圧V21(2.6次)、V22(2.8次)をそれぞれ抽出し、それの変化分ΔV21、ΔV22を所定の判定値J1bとそれぞれ比較して、検出信号S13、S14をそれぞれ出力するものである。
【0083】
四つの第1判定器48における判定値J1a、J1bは、互いに同じ値でも良いし、異なる値でも良い。判定する差分ΔV11、ΔV12、ΔV21、ΔV22に応じて決めれば良い。例えば、図8の例では、二つの判定値J1aは共に1.5、二つの判定値J1bは共に8に設定している。
【0084】
論理積回路49は、四つの検出信号S11〜S14の論理積(AND)を取って上記第1検出信号D1 を出力するものである。
【0085】
再び図4を参照して、第2監視回路50は、第2抽出器52、第2判定器54および継続判定器56を備えている。
【0086】
第2抽出器52は、連系点電圧Vs から、より具体的にはそれをディジタルに変換した電圧Vsdから、離散フーリエ変換によって、前記注入次数m±1次の範囲内にありかつ奇数次を除く次数である補助次数pの電圧Vp を、前記第1抽出器44における計測期間よりも短い計測期間で抽出するものである。
【0087】
補助次数pを注入次数m±1次の範囲内にすることによって、補助次数pは注入次数mに近くなるので、単独運転発生時に、補助次数pの電圧Vp は、注入次数mの電圧Vm (または後述する注入次数mのアドミタンスもしくはインピーダンス)と同じ方向に変化する(具体的には、電圧またはインピーダンスは大きくなる方向に変化し、アドミタンスは小さくなる方向に変化する)。
【0088】
しかも、補助次数pが注入次数m±1次の範囲内であれば、その次数の電圧Vp 等において、系統健全時と単独運転発生時とを区別する判定値を設けることができる含有率の差が発生するので、補助次数pの電圧Vp 等を用いることによっても、単独運転検出を行うことができる。例えば、注入次数mが前述した2.2次、2.4次、2.6次および2.8次の分散注入の場合、補助次数pを2次とすると、その次数の電圧Vp の差分ΔVp は、系統健全時は約0%、単独運転発生時は約0.3%よりも大きくなるので、判定値J2 を0.3%にすることによって、単独運転検出を行うことができる。
【0089】
補助次数pから奇数次を除外しているのは、配電系統1には元々奇数次高調波の含有率が高く、しかも少しの系統条件の変動で奇数次高調波成分も変化するので、奇数次を補助次数pに用いるのは好ましくないからである。
【0090】
補助次数pとして注入次数mと同じ次数を用いても良い場合もあるが、第2監視回路50(具体的には第2抽出器52)において注入次数mを用いずに補助次数pを用いるのは次の理由による。
【0091】
即ち、第2抽出器52において、所望の次数を系統基本波から正しく分離して抽出するためには、当該第2抽出器における計測期間を、系統基本波の整数倍にする必要がある(これは第1抽出器44においても同様である)。注入次数mが例えば2.5次の場合は、計測期間を系統基本波の2サイクルにすることができるので(それによって上記整数倍になるから)、この場合は補助次数pとして注入次数mと同じ2.5次を用いても良い。しかし、注入次数mが例えば2.2次の場合は、計測期間は5サイクル必要になるから(それによって上記整数倍になるから)、この場合は、補助次数pとして注入次数mとは別の次数を用いる方が、計測期間を短くすることができる。
【0092】
つまり上記のような範囲の補助次数pを用いることによって、第2抽出器52において、短い計測期間で系統基本波と分離することができる次数をある程度自由に選択することができるので、これを用いることによって、第2抽出器52の応答速度を速くして、配電系統1における過渡変動の発生・終了に対して高速に応答することができるようになる。
【0093】
前記第1抽出器44における計測期間は、例えば、系統基本波の5サイクル分または10サイクル分等の期間である。第2抽出器52における計測期間は、例えば、補助次数pが2次の場合、系統基本波の1サイクル分または半サイクル分の期間であり、補助次数pが2.5次の場合は2サイクル分の期間である。
【0094】
第2判定器54は、第2抽出器52から与えられる補助次数の電圧Vp を所定の判定値J2 と比較して、前記分散電源28が単独運転になったことを検出して第2検出信号D2 を出力するものである。
【0095】
継続判定器56は、第2判定器54から与えられる第2検出信号D2 が所定の継続確認時間継続したときに第3検出信号D3 を出力するものである。
【0096】
第2抽出器52の構成の一例を図9に示す。第2抽出器52は、通常の離散フーリエ変換器で構成しても良いけれども、この例では、離散フーリエ変換の演算を繰り返して行う際に一つ前の演算結果をその次の演算に用いる回帰型離散フーリエ変換器によって構成している。このような回帰型離散フーリエ変換器は、例えば特許第3921235号公報等にも記載されており、公知のものである。
【0097】
この回帰型離散フーリエ変換器(即ち第2抽出器52)は、信号を加算および減算する加減算器82、信号を遅延させる遅延回路84、86、信号に係数を掛ける演算器88、90を備えている。図中のZは単位遅延演算子、Nは計測期間におけるサンプル数、aは次式で表される回転因子、jは虚数単位、kは計測期間での次数、2/Nは係数である。例えば、上記補助次数pを2次、計測期間を系統基本波の1サイクル分の期間とする場合、N=128、k=2である。補助次数pを2.5次、計測期間を系統基本波の2サイクル分の期間としても良い。
【0098】
[数6]
a=exp(−j2πk/N)
【0099】
この第2抽出器52は、計測期間を第1抽出器44のものよりも短くしているので、上記第1抽出器44の利点および欠点とは反対の利点および欠点を有している。即ち、計測期間が短くて応答が速いために、系統が正常に戻ると過渡変動の影響から速やかに脱却することができる。但しこれと交換に、計測期間が短いために周波数分解能が低く、系統の周波数変動によってリーケージエラーの影響を受ける度合が高くなる。
【0100】
第2判定器54および継続判定器56の構成の一例を図10に示す。
【0101】
この第2判定器54は、第2抽出器52から与えられる補助次数pの電圧Vp の差分ΔVp を判定する場合の例であり、差分算出器92、絶対値演算器98および第1の比較器100を備えている。
【0102】
差分算出器92は、上記補助次数pの電圧Vp について、現時点よりも系統基本波の整数倍サイクル前(例えば5サイクル前、10サイクル前等)の値と現時点との差分ΔVp を算出するものであり、遅延回路94および減算器96を有している。遅延回路94は、上記電圧Vp を上記整数倍サイクル分遅延して出力する。減算器96は、第2抽出器52から与えられる電圧Vp から、遅延回路94から与えられる電圧を減算して、上記差分ΔVp を出力する。通常状態で系統電圧の変動がなければ、上記電圧Vp の変動もないので、上記差分ΔVp は0となる。
【0103】
絶対値演算器98は、減算器96から与えられる差分ΔVp の絶対値を演算して出力する。但しこの絶対値演算器98は、必ず設けなくてはならないものではない。
【0104】
比較器100は、絶対値演算器98から与えられる差分ΔVp の絶対値|ΔVp |を判定値J2 と比較して、前者|ΔVp |が後者がJ2 以上のときに上記第2検出信号D2 を出力する。判定値J2 は、系統健全時の上記差分ΔVp と単独運転時の上記差分ΔVp との間の値にしておけば良い。例えば、2次の電圧Vp の差分ΔVp を判定する場合、判定値J2 は前述したように0.3%(0.003pu)程度にすれば良く、この実施例では0.3%にしている。
【0105】
なお、第2判定器54は上記例のように電圧Vp の差分ΔVp (より具体的にはその絶対値|ΔVp |)を比較器100によって判定する代わりに、電圧Vp の電圧レベル(即ち電圧Vp の絶対値)そのものを比較器100によって判定するものでも良い。但し、差分ΔVp を判定する方が、単独運転発生時の変化がより速くかつより大きくなるので、単独運転をより速く判定して単独運転検出をより高速化することができる。
【0106】
継続判定器56は、この例では、オフディレイタイマ102および継続判定器104を備えている。
【0107】
オフディレイタイマ102は、上記第2検出信号D2 を受けるタイマであって、オフするタイミングを所定時間遅らせるものである。これによって、上記第2検出信号D2 にチャタリング(極短時間の断続)が含まれていても、それをオン優先で修正してチャタリングを含まない矩形波状の第4検出信号D4 を出力することができる。オフディレイ時間は、第2検出信号D2 に含まれる可能性のあるチャタリングの時間幅よりもある程度長くしておけば良く、例えば系統基本波の半サイクル分(50Hzで10m秒)である。このようなオフディレイタイマ102を設けておく方が、チャタリングを含まない検出信号を出力することができるので好ましい。
【0108】
継続判定器104は、上記第4検出信号D4 が所定の継続確認時間T1 のあいだ継続していることを判定して上記第3検出信号D3 を出力する。この継続確認時間T1 は、例えば、次のようにして定めれば良い。
【0109】
(a)上記差分算出器92において差分ΔVp を求める時間差を系統基本波の10サイクル分とすると、単独運転発生時(瞬低の同時発生の有無を問わない)、単独運転の継続に伴って、第2判定器54は上記10サイクル分の間、第2検出信号D2 を出力する。10サイクル前と現在との差分ΔVp を判定に用いるからである。
【0110】
(b)一方、瞬低発生時(単独運転を伴わない場合)、単独運転の継続はなく瞬低のみであるので、第2判定器54は第2抽出器52における計測期間+α(αは、アナログフィルタ38による影響等を考慮した期間)しか第2検出信号D2 を出力しない。例えば、第2抽出器52における計測期間を系統基本波の1サイクル分とし、αを0.5サイクル分とすると、第2判定器54は系統基本波の1.5サイクル分程度の間しか第2検出信号D2 を出力しない。
【0111】
従って、上記継続確認時間T1 は、瞬低による不要動作を防止するために上記(b)の1.5サイクル分の時間より長く、かつ単独運転を検出するために上記(a)の10サイクル分の時間よりも短い範囲内で、短めに(これは高速検出のためである)定めれば良い。それによって、第2監視回路50は、瞬低発生時に不要動作を起こすことなく、単独運転を高速で検出することができる。この実施例では、一例として、上記継続確認時間T1 を、系統基本波の2.5サイクル分の時間(50Hzで50m秒)に定めている。
【0112】
再び図4を参照して、論理積回路58は、上記第1監視回路42から与えられる第1検出信号D1 と第2監視回路50から与えられる第3検出信号D3 の論理積(AND)を取って、両検出信号D1 、D3 が共に出力されているときに上記単独運転検出信号DSを出力する。この単独運転検出信号DSの出力によって、単独運転監視装置36は、最終的に、それが設けられている自設備20内の分散電源28が単独運転になったことを検出したことになる。
【0113】
単独運転監視装置36による単独運転検出後に分散電源28の解列を行うには、例えば、上記単独運転検出信号DSによって図3に示すスイッチ22を開放すれば良い。
【0114】
以上説明したように、この単独運転検出装置30においては、第1監視回路42を構成する第1抽出器44および第1補正器46によって、抽出した注入次数mの高調波成分から配電系統1の基本波成分に基づく誤差を除去することができるので、即ちリーケージエラーを小さくすることができるので、第1監視回路42による分散電源28の単独運転検出において、系統周波数変動時の不要動作を防止することができる。
【0115】
第2監視回路50で扱う上記補助次数pは注入次数mに近いので、単独運転発生時に補助次数pの電圧Vp は、注入次数mの電圧Vm と同じ方向に変化する。しかもこの補助次数pには、短い計測期間で配電系統1の基本波と分離することのできる次数を選択することができるので、これを用いることによって、第2抽出器52によって第1抽出器44よりも短い計測期間で補助次数pの電圧Vp を抽出することができる。従って、第2抽出器52の応答速度を速くして、配電系統1における過渡変動の発生・終了に対して高速に応答することができる。更に、継続判定器56における継続確認時間T1 によって、瞬低状態と単独運転状態とを区別することができる。これらによって、第2監視回路50によって、瞬低発生時に不要動作を起こすことなく、分散電源28の単独運転を高速検出することができる。
【0116】
しかし、第2抽出器52における計測期間を短くすると、それによって周波数分解能が低下して、系統周波数変動時のリーケージエラーが大きくなるので、第2監視回路50は、系統周波数変動時に不要動作を起こす可能性がある。
【0117】
そこで、論理積回路58によって、上記第1監視回路42からの第1検出信号D1 と第2監視回路50からの第3検出信号D3 との論理積を取ることにしており、これによって、前述したFRT要件である系統擾乱(瞬低および周波数変動)発生時の不要動作防止と、分散電源28の単独運転の高速検出とを両立させることができる。
【0118】
また、注入次数mが2次より大かつ3次より小の場合、補助次数pとして2次を使用することができる。補助次数pを2次にすることによって、第2抽出器52における計測期間を配電系統1の基本波の1サイクル分の期間にすることができるので、第2抽出器52の応答速度をより速くすることができる。その結果、配電系統1における過渡変動の発生・終了に対してより高速に応答することができるので、その分、継続判定器56における継続確認時間T1 を短くすることができ、これらによって、第2監視回路50において、瞬低状態と単独運転状態とをより短時間で区別することができる。ひいては、第2監視回路50によって、瞬低発生時に不要動作を起こすことなく、分散電源28の単独運転をより高速で検出することができる。
【0119】
注入次数mが2次より大かつ3次より小の場合、補助次数pとして2.5次を使用することもできる。補助次数pの2.5次は次数間高調波(即ち非整数倍次数の高調波)であるので、系統健全時の配電系統1における電圧含有率が小さい。例えば、系統健全時の含有率は、2次が0.1%程度あるのに対して、2.5次は0.01%程度しかなく0に近いので、単独運転発生を区別しやすい。従って2.5次の方が、第2判定器54における判定が容易になる。その結果例えば、第2判定器54において、補助次数pの電圧Vp の差分ΔVp ではなく、電圧Vp の絶対値で判定することも可能になり、それによって第2判定器54の構成の簡素化を図ることができる。
【0120】
しかも、補助次数pを2.5次にすることによって、第2抽出器52における計測期間を配電系統1の基本波の2サイクル分の期間にすることができるので、補助次数pが2次の場合ほどではないとしても、第2抽出器52の応答速度を速くすることができる。その結果、配電系統1における過渡変動の発生・終了に対して高速に応答することができるので、その分、継続判定器56における継続確認時間T1 を短くすることができ、これらによって、第2監視回路50において、瞬低状態と単独運転状態とを短時間で区別することができる。ひいては、第2監視回路50によって、瞬低発生時に不要動作を起こすことなく、分散電源28の単独運転を高速で検出することができる。
【0121】
(2)シミュレーション結果
図2に示したシステムを模擬したシミュレーションモデルを用いてシミュレーションを行った結果を図11〜図20に示す。
【0122】
当該シミュレーションモデルでは、上位系統2および高圧配電線10のインピーダンスを30+j48%(10MVAベース)とし、配電用変圧器14のインピーダンスをj5%(10kVAベース)とし、負荷11を800kWとし、出力10kWの分散電源28を有する80台(第1群用が40台、第2群用が40台)の分散電源保有設備20が同じ配電用変圧器14に接続されているものとし、各分散電源保有設備20内の各電流注入装置32から0.58Aの注入電流Iinj をそれぞれ注入するものとした。
【0123】
そして、自設備20を第1群に属するものとし、その単独運転検出装置30内の単独運転監視装置36は、上記図4〜図10に示す構成のものとした。但し、第1監視回路42は図8に示すものとした。従って以下においては、これらの図中(特に図4、図8、図10中)の符号をも参照するものとする。
【0124】
このシミュレーションにおいて採用した各種の設定値等を再度記載すると、系統基本波は50Hz、各第1抽出器44(具体的にはその離散フーリエ変換器)における計測期間を系統基本波の10サイクル分、判定値J1aを1.5、判定値J1bを8、補助次数pを2次、第2抽出器52(具体的にはその離散フーリエ変換器)における計測期間を系統基本波の1サイクル分、第2判定器54内の差分算出器92において系統基本波の10サイクル前からの変化分検出、判定値J2 を0.3%(0.003pu)、継続判定器56内のオフディレイタイマ102におけるオフディレイ時間を系統基本波の半サイクル分(10m秒)、継続判定器104における継続確認時間T1 を系統基本波の2.5サイクル分(50m秒)とした。
【0125】
なお、図11〜図20中の信号D2 〜D4 の縦軸の目盛は、作図ソフトの都合で−1〜2まで表示しているが、論理値であるので「0」と「1」が正しい。
【0126】
このシミュレーションの結果だけを先にまとめて表2に示す。その中身は以下において説明する。
【0127】
【表2】
【0128】
(2−1)単独運転発生時
変電所4の遮断器8が開放されて単独運転が発生した(即ち、分散電源保有設備20内の分散電源28が単独運転になった)場合を図11、図12に示す。連系点電圧Vs には、系統基本波以外に、補助次数p(2次)の高調波および注入次数m(2.1次等)の高調波を含有させている。
【0129】
図11(A)に示すように、2.0秒の時点で単独運転を発生させた。分散電源保有設備20内の分散電源28が発電をしているので連系点電圧Vs に大きな変化はないが、図11(B)に示すように、第2抽出器52において測定している補助次数の電圧Vp は、単独運転発生に伴って増大している。これは、遮断器8が開放されたことによって、低インピーダンスの上位系統2が切り離されて遮断器8よりも下流側の配電系統1のインピーダンスが増大し、それによって補助次数に近い注入次数成分(主に2.2次、2.4次)の電圧の含有率が急増したことによる。即ち、第2抽出器52では、計測期間を系統基本波の1サイクル分としているため、整数次の高調波しか分離することはできず、補助次数(2次)に近い2.2次、2.4次等の注入次数成分も上記電圧Vp に含まれて第2抽出器52から出力されるが、単独運転発生に伴う上記インピーダンス増大によって、その含有率が急増するからである。
【0130】
上記に伴って、図11(C)に示すように、補助次数の電圧の差分ΔVp も増大するが、2.2秒付近では小さくなる。これは、前述したように第2判定器54において系統基本波の10サイクル前との変化分検出を行っているためである。
【0131】
上記に伴って、図11(D)に示すように、差分ΔVp が判定値J2 以上の間、第2判定器54から第2検出信号D2 が出力される。良く見ると、この第2検出信号D2 の立上り時にチャタリングが生じている。このチャタリングは、前述したオフディレイタイマ102によって除去されて、図11(E)に示す矩形波状の第4検出信号D4 が出力される。この第4検出信号D4 は、オフディレイタイマ102におけるオフディレイ時間だけ第2検出信号D2 よりも長くなる。
【0132】
この第4検出信号D4 が上記継続確認時間T1 だけ継続した時点で、継続判定器56から図12(A)に示すように第3検出信号D3 が出力される。これによって、第2監視回路50が単独運転を検出したことになる(表2中のBも参照)。
【0133】
一方、上述したように単独運転発生(即ち遮断器8の開放)に伴って、低インピーダンスの上位系統2が切り離されて遮断器8よりも下流側の配電系統1のインピーダンスが増大するので、第1監視回路42(図8参照)において判定している各注入次数電圧の変化分ΔV11、ΔV12、ΔV21、ΔV22は、図12(B)〜(E)に示すように急増して、各判定値J1a、J1b以上になる(図中黒丸印参照)。即ち、図8中の検出信号S11〜S14が全て出力され、その内で最も遅い時刻t1 において四つの検出信号S11〜S14のANDが成立して第1検出信号D1 が出力される。これによって、第1監視回路42が単独運転を検出したことになる(表2中のAも参照)。
【0134】
そして、時刻t1 の時点では第3検出信号D3 は既に出力されているので(図12(A)参照)、時刻t1 の時点で第1検出信号D1 と第3検出信号D3 のANDが成立して、論理積回路58から、即ち単独運転監視装置36から単独運転検出信号DSが出力される。これによって、単独運転監視装置36は正式に分散電源28の単独運転を検出したことになる。図12に示すように、単独運転発生から時刻t1 までは0.1秒以内であり、0.1秒以内の高速検出を実現することができている。
【0135】
ちなみに、電気設備技術基準の解釈第19条によれば、地絡事故発生後に分散電源の解列が完了するまでの時間として1秒以内が求められており、変電所4の遮断器8は、通常、地絡事故検出後、約0.9秒で解列するので、残された0.1秒以内という高速で分散電源の単独運転を検出することが要請されているが、上記単独運転監視装置36でこれを満たすことができることが確かめられた。
【0136】
(2−2)瞬低発生時
系統擾乱の例として瞬低が発生した場合を図13、図14に示す。
【0137】
図13(A)は、電圧位相が90度である2.0秒の時点で瞬低が発生し、残電圧が20%となり、0.1秒後に回復したときの連系点電圧Vs を示す。
【0138】
瞬低発生によって連系点電圧Vs が急変してその基本波成分の周期性が崩れるので、その過渡変動で第2抽出器52において大きな抽出誤差が発生し、それが図13(B)に示すように注入次数の電圧Vp に含まれる。
【0139】
上記に伴って、図13(C)に示すように、注入次数の電圧の差分ΔVp も増大する。2.2秒後付近と2.3秒後付近でも増大しているのは、前述したように第2判定器54において系統基本波10サイクル前との変化分検出を行っているためである。
【0140】
上記に伴って、図13(D)に示すように、差分ΔVp が判定値J2 以上の間、第2判定器54から第2検出信号D2 が出力され、それに伴って、図13(E)に示すように、オフディレイタイマ102から第4検出信号D4 が出力される。
【0141】
この第4検出信号D4 は、上記継続確認時間T1 以上には継続しないので、継続判定器56からは図14(A)に示すように第3検出信号D3 は出力されない。即ち、第2監視回路50は瞬低発生時には不要動作しない(表2中のDも参照)。
【0142】
一方、連系点電圧Vs を離散フーリエ変換した出力(即ち第1監視回路42の第1抽出器44の出力)には、瞬低発生によって、見かけ上のバックグラウンドノイズが含まれることになり、このバックグラウンドノイズは注入次数m付近でも大きな値を有しているので、第1監視回路42において測定している各注入次数電圧の変化分ΔV11、ΔV12、ΔV21、ΔV22は、図14(B)〜(E)に示すように急増して、全て各判定値J1a、J1b以上になる(図中黒丸印参照)。従って、第1監視回路42から第1検出信号D1 が出力されるが、この場合は単独運転ではないので不要動作したことになる(表2中のCも参照)。
【0143】
しかしこの単独運転監視装置36では、前述したように、論理積回路58において第1検出信号D1 と第3検出信号D3 のANDを取ることにしており、上記のように第3検出信号D3 は出力されないので、単独運転監視装置36から単独運転検出信号DSは出力されない。即ち、第1監視回路42における不要動作を第2監視回路50によってブロックして、瞬低発生時の不要動作(誤検出)を防止することができている。
【0144】
(2−3)単独運転と瞬低の同時発生時
変電所4の遮断器8が開放されて単独運転が発生するのと同時に瞬低が発生した場合を図15、図16に示す。これらは、上記図11、図12に示す単独運転発生と図13、図14に示す瞬低発生とを合せたものに相当するのでそれらとの相違点を主体に説明する。なお、遮断器8が開放されて単独運転が発生すると、上位系統2からの電流供給が絶たれるので、分散電源保有設備20内の分散電源28の合計出力よりも、各分散電源保有設備20内の負荷や負荷11等の合計負荷の方が大きい場合に瞬低が同時に起こり得るので、それを模擬したものである。
【0145】
単独運転の発生状況および瞬低の発生状況は先のシミュレーションの場合と同じである。この場合の連系点電圧Vs 、注入次数の電圧Vp 、その差分ΔVp を図15(A)〜(C)に示す。これらは、図11(A)〜(C)と図13(A)〜(C)とを合わせたものに相当する。図15(B)に示すように、注入次数の電圧Vp は、瞬低発生直後と終了直後の間でもレベルが高いが、これは単独運転によるものである。
【0146】
その結果、図15(D)、(E)に示すように、検出信号D2 、D4 は長く出力され、第4検出信号D4 が上記継続確認時間T1 だけ継続した時刻t2 の時点で、図16(A)に示すように第2監視回路50から第3検出信号D3 が出力される。これによって、第2監視回路50が単独運転を検出したことになる(表2中のFも参照)。
【0147】
一方、単独運転発生および瞬低発生に伴って、上述したのと同様の理由によって、各注入次数電圧の変化分ΔV11、ΔV12、ΔV21、ΔV22は、図16(B)〜(E)に示すように急増して、時刻t2 より前の時点で各判定値J1a、J1b以上になる(図中黒丸印参照)。従って、上述したのと同様の動作によって、時刻t2 より前の時点で第1監視回路42から第1検出信号D1 が出力される。これによって、第1監視回路42が単独運転を検出したことになる(表2中のEも参照)。
【0148】
従って、時刻t2 の時点で第1検出信号D1 と第3検出信号D3 のANDが成立して、論理積回路58から、即ち単独運転監視装置36から単独運転検出信号DSが出力される。これによって、単独運転監視装置36は正式に分散電源28の単独運転を検出したことになる。図16に示すように、単独運転発生から時刻t1 までは0.1秒以内であり、0.1秒以内の高速検出を実現することができている。
【0149】
(2−4)ランプ状の周波数変動発生時
系統擾乱の例として、ランプ状(傾斜状)の系統周波数変動が発生した場合を図17、図18に示す。
【0150】
図17(A)に示すように、2.0秒の時点から−2Hz/秒の傾きで周波数低下を開始した。従って例えば、時刻t3 (2.2秒)の時点では−0.4Hzの周波数低下状態にある。
【0151】
この系統周波数変動により、図17(B)、(C)に示すように、補助次数の電圧Vp およびその差分ΔVp は少しずつ大きくなっている。差分ΔVp は時刻t3 より少し前から判定値J2 以上になっているけれども、判定値J2 の取り方によっては、この例のように差分ΔVp が細かい周期で判定値J2 以上になり、図17(D)に示すように第2検出信号D2 は出力されるけれどもそれが細かい周期で断続する場合がある。これも一種のチャタリングと言える。
【0152】
しかし、オフディレイタイマ102におけるオフディレイ時間はこの第2検出信号D2 の断続周期よりも長いので、図17(E)に示すように、チャタリングが除去されて、矩形波状の第4検出信号D4 が出力される。
【0153】
この第4検出信号D4 が上記継続確認時間T1 だけ継続した時点で、継続判定器56から図18(A)に示すように第3検出信号D3 が出力されるけれども、この場合は単独運転ではないので第2監視回路50は不要動作したことになる(表2中のHも参照)。
【0154】
しかし、前述したように第1監視回路42は計測期間が長く、かつ第1補正器46も有していて、系統周波数変動に対してリーケージエラーが小さいので、図18(B)〜(E)に示すように、各注入周波数電圧の変化分ΔV11、ΔV12、ΔV21、ΔV22は、系統周波数変動の影響を殆ど受けず、判定値J1a、J1bよりも小さい状態を保っている。従って、第1監視回路42からは第1検出信号D1 は出力されない。即ち、第1監視回路42は不要動作しない(図2中のGも参照)。
【0155】
そしてこの単独運転監視装置36では、前述したように、論理積回路58において第1検出信号D1 と第3検出信号D3 のANDを取ることにしており、上記のように第1検出信号D1 は出力されないので、単独運転監視装置36から単独運転検出信号DSは出力されない。即ち、第2監視回路50における不要動作を第1監視回路42によってブロックして、ランプ状の周波数変動発生時の不要動作(誤検出)を防止することができている。
【0156】
(2−5)ステップ状の周波数変動発生時
系統擾乱の例として、ステップ状の系統周波数変動が発生した場合を図19、図20に示す。
【0157】
図19(A)に示すように、2.0秒の時点から+0.8Hzの周波数ステップ上昇を開始してそれを3サイクルの間続けた後、同じ割合で周波数をステップ下降させて元へ戻した。
【0158】
この系統周波数変動により、図19(B)、(C)に示すように、補助次数の電圧Vp およびその差分ΔVp は大きくなり、差分ΔVp が判定値J2 以上になり、図19(D)に示すように第2検出信号D2 が出力され、更に図19(E)に示すように第4検出信号D4 が出力される。
【0159】
この第4検出信号D4 が上記継続確認時間T1 だけ継続した時点で、継続判定器56から図20(A)に示すように第3検出信号D3 が出力されるけれども、この場合は単独運転ではないので第2監視回路50は不要動作したことになる(表2中のJも参照)。
【0160】
しかし、前述したように第1監視回路42は計測期間が長く、かつ第1補正器46も有していて、系統周波数変動に対してリーケージエラーが小さいので、図20(B)〜(E)に示すように、各注入周波数電圧の変化分ΔV11、ΔV12、ΔV21、ΔV22は、系統周波数変動の影響を殆ど受けず、判定値J1a、J1bよりも小さい状態を保っている。従って、第1監視回路42からは第1検出信号D1 は出力されない。即ち、第1監視回路42は不要動作しない(図2中のIも参照)。
【0161】
そしてこの単独運転監視装置36では、前述したように、論理積回路58において第1検出信号D1 と第3検出信号D3 のANDを取ることにしており、上記のように第1検出信号D1 は出力されないので、単独運転監視装置36から単独運転検出信号DSは出力されない。即ち、第2監視回路50における不要動作を第1監視回路42によってブロックして、ステップ状の周波数変動発生時の不要動作(誤検出)を防止することができている。
【0162】
以上のように、シミュレーションによっても、上記単独運転監視装置36によれば、FRT要件である系統擾乱(瞬低および周波数変動)発生時の不要動作防止と、単独運転の高速検出とを両立させることができることが確かめられた。
【0163】
なお、表2中のK〜Nについて、単独運転発生前に系統周波数変動があっても、単独運転発生後は系統から切り離されるから、その系統周波数変動は単独運転検出に影響しない。従ってこの場合は、シミュレーションを行うまでもなく、表2中のA、Bの場合と同様に、正しく単独運転検出を行うことができることが分る。
【0164】
(3)他の実施形態
(3−1)第2抽出器52の他の例
注入次数mを2次より大かつ3次より小にし、かつ補助次数pを2次にする場合、第2監視回路50を構成する第2抽出器52は、図9に示したものの代わりに、図21に示すものとしても良い。この第2抽出器52は、半波加算コムフィルタ106と半波離散フーリエ変換器114とを備えている。
【0165】
半波加算コムフィルタ106は、系統基本波の半サイクルの遅延時間を用いて、連系点電圧Vs (具体的には前記ディジタルの電圧Vsd)から、配電系統1の基本波成分および奇数次高調波成分を除去するものである。
【0166】
この半波加算コムフィルタ106は、連系点電圧Vs (上記電圧Vsd)を遅延する遅延回路108と、遅延前後のデータを加算する加算器110と、入力に対する出力のゲインを1に調整するための演算器112とを有している。遅延回路108における遅延時間は、配電系統1の基本波の半周期ぶん(50Hz系で10m秒)である。
【0167】
この半波加算コムフィルタ106によって、配電系統1の基本波成分および奇数次高調波成分を除去して、系統で大きな含有率の成分を除去することができる。
【0168】
半波離散フーリエ変換器114は、半波加算コムフィルタ106から与えられる電圧から、離散フーリエ変換によって前記補助次数pの電圧Vp を抽出するものであって、系統基本波の半サイクルの期間をベースとしてその半波を計測期間とするものである。
【0169】
この半波離散フーリエ変換器114も、回帰型離散フーリエ変換器であり、図9に示した回帰型離散フーリエ変換器と似た構成をしている。即ちこの半波離散フーリエ変換器114は、信号を加算する加算器116、信号を遅延させる遅延回路118、120、信号に係数を掛ける演算器122、124を備えている。図中のZは単位遅延演算子、Nは計測期間におけるサンプル数、aは前記数6で表される回転因子、jは虚数単位、kは計測期間での次数、4/Nは係数である。
【0170】
図9のものとの主な相違点は、この半波離散フーリエ変換器114は系統基本波の半サイクルの期間をベースとしてその半波を計測期間としているため、系統基本波1サイクルを図9の場合と同様に128サンプルとすると、その1/2のため、N=128/2=64、k=1となる。また、加算器116において、遅延回路118からの半波前(N/2サンプリング前)のデータを加算している。更に、半波離散フーリエ変換器では、計測期間が全波離散フーリエ変換器の半分となり出力値が半分になるので、図9の場合と同じ出力値を得るために係数を2倍の4/Nとしている。
【0171】
この第2抽出器52によれば、半波加算コムフィルタ106によって配電系統1の偶数次高調波成分のみを抽出することができるので、半波離散フーリエ変換器114によって2次である補助次数の電圧Vp を正しく分離して抽出することができる。その結果、半波加算コムフィルタ106および半波離散フーリエ変換器114における合計の計測期間を配電系統1の基本波の0.75サイクル分の期間にすることができるので、図9の場合に比べて、第2抽出器の応答速度をより速くすることができる。合計の計測期間が0.75サイクルとなるのは、系統基本波を基準にして、(a)半波加算コムフィルタ106における計測期間が0.5サイクル、(b)半波離散フーリエ変換器114における計測期間は、半波だから0.5サイクル×2次だから1/2=0.25サイクルとなり、(a)+(b)=0.75サイクルとなる。
【0172】
このように合計の計測期間を短くすることができる結果、配電系統1における過渡変動の発生・終了に対してより高速に応答することができるので、その分、継続判定器56における継続確認時間T1 を短くすることができ、これらによって、第2監視回路50において、瞬低状態と単独運転状態とをより短時間で区別することができる。ひいては、第2監視回路50によって、瞬低発生時に不要動作を起こすことなく、単独運転をより高速で検出することができる。
【0173】
(3−2)第2判定器54の他の例
第2監視回路50を構成する第2判定器54は、図10に示したものの代わりに、図22に示すものとしても良い。それによって、連系点電圧Vs の測定を固定周波数サンプリング方式で行っている場合でも、定常状態(これは瞬低や単独運転のような過渡変動がない状態のこと。以下同様)において系統周波数および/または注入周波数(注入次数)が定格からブレた場合に、第2判定器54から第2検出信号D2 が出力されるのを防止することができるので、当該ブレによって不要動作が起こることを防止することができる。
【0174】
この第2判定器54は、差分算出器92、第1〜第3の2階差分算出器131〜133、第1〜第4の比較器100、154〜156および論理積回路158を備えている。94、141〜144は遅延回路、96、145〜149は減算器である。更にこの例では、絶対値演算器98、151〜153も備えているが、これらは、先に絶対値演算器98について説明したように必要に応じて設ければ良い。
【0175】
差分算出器92、絶対値演算器98および比較器100は、図10に示したものと同じなので、重複説明を省略する。但し比較器100は第2検出信号D2 の代わりに第1判定信号S1 を出力する。
【0176】
2階差分算出器131は、差分算出器92と同様の構成の差分算出器134および135を互いに直列接続した構成をしており、第2抽出器52から与えられる前記補助次数pの電圧Vp について、現時点よりも配電系統1の基本波の整数倍サイクル前の値と現時点の値との差分を算出する(これは差分算出器135による)ことと直列に、前記基本波の整数倍サイクルよりも少し短い期間前の値と現時点の値との差分を算出する(これは差分算出器134による)ことによって、第1の2階差分Δ2Vp1を算出する。差分算出器134と135を前後逆に設けても良い。2階差分を取ることに変りはないからである。
【0177】
2階差分算出器132は、差分算出器92と同様の構成の差分算出器136および137を互いに直列接続した構成をしており、前記補助次数の電圧Vp について、現時点よりも配電系統1の基本波の整数倍サイクル前の値と現時点の値との差分を算出する(これは差分算出器137による)ことと直列に、前記基本波の整数倍サイクルよりも少し長い期間前の値と現時点の値との差分を算出する(これは差分算出器136による)ことによって、第2の2階差分Δ2Vp2を算出する。差分算出器136と137を前後逆に設けても良い。2階差分を取ることに変りはないからである。
【0178】
2階差分算出器133は、差分算出器92と同様の構成の差分算出器138および上記差分算出器134を互いに直列接続した構成をしており、前記補助次数の電圧Vp について、現時点よりも配電系統1の基本波の整数倍サイクルよりも少し短い期間前の値と現時点の値との差分を算出する(これは差分算出器134による)ことと直列に、前記基本波の整数倍サイクルよりも少し長い期間前の値と現時点の値との差分を算出する(これは差分算出器138による)ことによって、第3の2階差分Δ2Vp3を算出する。差分算出器134と138を前後逆に設けても良い。2階差分を取ることに変りはないからである。またこの例では、差分算出器134を2階差分算出器131と2階差分算出器133とに兼用しているが、そのようにせずに別に設けても良い。
【0179】
遅延回路94、140〜144を示すブロック中に記載しているZは前述した単位遅延演算子であり、−N1〜−N3は遅延時間に相当するサンプル数である。これが異なれば遅延時間が異なる。具体的には、この例では、系統基本波1サイクルのサンプル数を120点として10サイクル前を標準としているため、N1=1280としている。これは周波数のブレがない場合用である。そして、周波数が0.4%程度高い場合用にN2=1280×0.996=1275とし、周波数が0.4%程度低い場合用にN3=1280×1.004=1285としている。
【0180】
比較器154〜156は、2階差分算出器131〜133から与えられる前記2階差分Δ2Vp1〜Δ2Vp3を判定値J3 〜J5 とそれぞれ比較して(より具体的にはこの例では、絶対値演算器151〜153を通した各2階差分の絶対値とそれぞれ比較して)、各2階差分が各判定値以上のときに判定信号S2 〜S4 をそれぞれ出力する。上記各判定値J2 〜J5 は、互いに異ならせても良いし、全て同じにしても良い。この例では、前述した0.3%(0.003pu)で全て同じにしている。
【0181】
論理積回路158は、比較器100、154〜156から与えられる判定信号S1 〜S4 の論理積(AND)を取って前記第2検出信号D2 を出力する。
【0182】
詳しくは後の(4)項で数式を用いて説明するけれども、定常状態において、配電系統1の系統周波数f1 および注入周波数fm (以下においては、前記注入次数mの代わりに、それと等価の注入周波数fm を用いて説明する)にブレがない場合(即ち定格周波数の場合)は、差分算出器92の出力である上記差分ΔVp は0またはほぼ0(以下、簡略化して0と言う)になるので、上記判定信号S1 は出力されない。定常状態で系統周波数f1 および/または注入周波数fm が定格から少しブレた場合は、そのブレに対応して、2階差分算出器131〜133の出力である上記2階差分Δ2Vp1〜Δ2Vp3の内の一つが0になるので、上記判定信号S2 〜S4 の内の一つは出力されない。
【0183】
このように、定常状態では、系統周波数f1 、注入周波数fm のブレの有無に拘わらず、判定信号S1 〜S4 の内の一つは0になる。従って論理積回路158でANDを取ることによって、定常状態で系統周波数f1 および/または注入周波数fm が定格から少しブレても、上記第2検出信号D2 は出力されないので、不要動作を防止することができる。
【0184】
以上のことを、表3を参照してもう少し詳しく説明する。
【0185】
【表3】
【0186】
定常状態で系統周波数f1 および/または注入周波数fm が定格または少しブレた場合、それに該当する表3中の各枡目A〜Iの内の差分算出器92、2階差分算出器131〜133の出力は0になるが、その他の枡目内の算出器の出力は0にはならない。
【0187】
例えば、定常状態で系統周波数f1 が少し低くかつ注入周波数fm も少し低くブレた場合は、枡目A内の2階差分算出器132の出力Δ2Vp2が0になるが、その他の算出器92、131、133の出力は0にはならない。従ってこの場合は、比較器155からは判定信号S3 は出力されないので、他の判定信号S1 、S2 、S4 が出力されても、論理積回路158から第2検出信号D2 は出力されない。従って、第2判定器54が上記ブレによって不要動作することを防止することができる。
【0188】
他の場合も同様であり、定常状態で系統周波数f1 および/または注入周波数fm が少しブレても、それに該当する表3中の枡目内の算出器の出力は0であるので、論理積回路158から第2検出信号D2 は出力されない。従って、第2判定器54が上記ブレによって不要動作することを防止することができる。
【0189】
一方、系統電圧に過渡変動(瞬低や単独運転)が発生した場合は、詳しくは後の(4)項で説明するけれども、その過渡変動は各算出器92、131〜133の出力にそのまま反映されるので、即応することができる。従って、この第2判定器54と継続判定器56とを組み合わせている第2監視回路50は、単独運転を検出することができると共に、瞬低と単独運転とを区別することができる。即ち、前記表2中のB他のように単独運転を検出することができると共に、前記表2中のDとFとを区別することができる。
【0190】
なお、系統周波数f1 や注入周波数fm のブレが想定値の0.4%程度でない場合は、各枡目内の算出器の出力は0にはならないが、その出力レベルが問題とならないように、例えば、判定値J2 〜J5 と値を適宜選定するとか、想定値を0.4%以外にすること等で対処することができる。
【0191】
(3−3)単独運転検出装置30の他の実施形態
上記のような第1監視回路42、第2監視回路50および論理積回路58を設ける技術は、前述した、うなりを利用するもの以外の次数間電流注入方式の単独運転検出装置にも広く適用することができる。その場合は、図3に示す各分散電源保有設備20内の単独運転検出装置30を構成する電流注入装置32および同期制御装置34の代わりに、低圧配電線16に配電系統1の基本波の1倍よりも大きい非整数倍の注入次数mの注入電流を注入する電流注入装置を設ければ良い。
【0192】
また、単独運転監視装置36は、連系点18における前記注入次数mの電圧Vm の測定に加えて、連系点18を流れる前記注入次数mの電流Im を測定して、当該注入次数の電圧Vm および電流Im を用いて、分散電源28が単独運転になったことを検出して単独運転検出信号DSを出力するものにしても良く、その場合の第1監視回路42の例を図23に示す。第2監視回路50および論理積回路58は前述したものにすれば良い。
【0193】
図23に示す第1監視回路42を、図4に示した第1監視回路42との相違点を主体に説明する。この第1監視回路42は、第1抽出器44、第1補正器46、第3抽出器160、第2補正器162、演算器164および第3判定器166を備えている。第1抽出器44および第1補正器46は前述したとおりである。
【0194】
第3抽出器160は、連系点18を流れる電流Is から、具体的には当該電流Is を前記アナログフィルタ38、A/D変換器40と同様のアナログフィルタおよびA/D変換器を通して得られるディジタルの電流Isdから、離散フーリエ変換によって、注入次数mの高調波成分、注入次数mの上側の非整数次数の上側次数成分および注入次数mの下側の非整数次数の下側次数成分をそれぞれ抽出する。
【0195】
第2補正器162は、第3抽出器160で抽出した上側次数成分および下側次数成分の重みつき平均から、前記抽出した注入次数mの高調波成分に含まれる配電系統1の基本波成分に基づく誤差を補間演算し、かつ前記抽出した注入次数mの高調波成分から当該誤差を減算して除去して、前記注入次数mの電流Im を抽出する。
【0196】
この第3抽出器160および第2補正器162は、図5に示した第1抽出器44および第1補正器46と同様の構成をしているので、重複説明は省略する。扱うものが電圧から電流に変るだけである。
【0197】
演算器164は、上記注入次数の電圧Vm および上記注入次数の電流Im を用いて、次式に従って、連系点18から見た配電系統1の注入次数mのアドミタンスYm またはインピーダンスZm を算出する。アドミタンスとインピーダンスとは互いに逆数の関係にあるだけなので、どちらを用いても良い。
【0198】
[数7]
Ym =Im /Vm
【0199】
[数8]
Zm =Vm /Im
【0200】
第3判定器166は、演算器164から与えられるアドミタンスYm またはインピーダンスZm を所定の判定値J6 と比較して、前記分散電源28が単独運転になったことを検出して前記第1検出信号D1 を出力する。変電所4の遮断器8が開放されて単独運転が発生すると、上位系統2の大きなアドミタンスが切り離されて遮断器8よりも下流側の配電系統1のアドミタンスは小さくなり、上記アドミタンスYm も小さくなるので(インピーダンスZm の場合はこれと逆に大きくなる)、このアドミタンスYm (またはインピーダンスZm )を第3判定器166によって判定することによって、単独運転を検出することができる。
【0201】
第3判定器166は、アドミタンスYm (またはインピーダンスZm )の大きさそのものを判定するものでも良いけれども、上記第1判定器48の場合と同様に、アドミタンスYm (またはインピーダンスZm )の時間的な変化分を判定するようにしても良く、その方が、より速く判定して、単独運転検出を高速化することができる。
【0202】
(4)系統周波数f1 や注入周波数fm が定常状態で少しブレた場合の電圧偏差発生(これは系統擾乱と判定される)の防止の詳しい説明
上記(3−2)項において後で詳述すると記載していた事項を以下に説明する。
【0203】
(4−1)系統周波数f1 が少し変化した場合の系統電圧変化分検出における「基準値の現在時刻に対する時間差」の補正
系統電圧v1(t)(これは式を単純にするため基本波だけで高調波はないとする。あっても同じことである)のnサイクル前(nは正の整数)との変化分をΔv1(t)とする。
【0204】
系統周波数のブレをΔf1 とすると、Δv1(t)は次式となる。
【0205】
[数9]
Δv1(t)=sin(2・π・(f1 +Δf1 )・t+θ1 )
−sin(2・π・(f1 +Δf1 )・(t−T)+θ1 )
【0206】
時間差Tは、系統周波数(標準周波数)f1 のn倍なので次式となる。
【0207】
[数10]
T=n/f1
【0208】
その結果、Δv1(t)は次式で算出される。
【0209】
[数11]
Δv1(t)=sin(2・π・(f1 +Δf1 )・t+θ1 )
−sin(2・π・(f1 +Δf1 )・(t−n/f1 )+θ1 )
=sin(2・π・(f1 +Δf1 )・t+θ1 )
−sin(2・π・(f1 +Δf1 )・t+θ1 −{2・π・(f1 +Δf1 )・(n/f1 ))})
=sin(2・π・(f1 +Δf1 )・t+θ1 )
−sin(2・π・(f1 +Δf1 )・t+θ1 −{2・π・n・(f1 +Δf1 )/f1 )})
【0210】
Δf1 が0であれば(ブレがなければ)、数11で第1項目と第2項目のそれぞれのsinの位相差は、2πnとなるので両者は同じ値となり、Δv1(t)=0となる。
【0211】
前記図22、表3中の差分算出器92は、この数11を利用するものである。
【0212】
しかし、Δf1 が≠0の場合は、第2項の{ }の中が2πn・(f1 +Δf1 )/f1 となり、2πの整数倍とならないため、Δv1(t)≠0となる。すなわち、系統電圧v1(t)が定常状態であるのに、変化(系統擾乱)があるように算出されてしまう。そこで、時間差Tを次式に変更する。
【0213】
[数12]
T′=n/(f1 +Δf1 )
【0214】
この結果、数11と同様の計算で、次式に示すようにΔv1(t)= 0とできる。
【0215】
[数13]
Δv1(t)=sin(2・π・(f1 +Δf1 )・t+θ1 )
−sin(2・π・(f1 +Δf1 )・(t−n/(f1 +Δf1 ))+θ1 )
=sin(2・π・(f1 +Δf1 )・t+θ1 )
−sin(2・π・(f1 +Δf1 )・t+θ1 −{2・π・n})
=sin(2・π・(f1 +Δf1 )・t+θ1 )
−sin(2・π・(f1 +Δf1 )・t+θ1 )
=0
【0216】
(4−2)系統周波数f1 および/まはた注入周波数fm がそれぞれ少しブレた状態での偏差発生の防止方法
系統周波数のブレをΔf1 とし、注入次数のブレをΔfm とする。(1次数で代表する)
【0217】
時間差Tは、数12のとおり、T′=n/(f1 +Δf1 ) とする。
【0218】
なお、この(4−2)では上記(4−1)と違いfm があるので、整数nについて、以下の制約をつける。
【0219】
[数14]
n・(fm /f1 )も正の整数
【0220】
例えばf1 =50Hz(基本波)、fm =110Hz(2. 2次高調波)とすると、fm /f1 =2. 2なので、(nは全ての整数ではなく)n=5、10、15、・・・(nは5の倍数)に限定される。その結果Δv(t)は次式となる。
【0221】
[数15]
Δv(t) =V1 ・{sin(2・π・(f1 +Δf1 )・t+θ1 )
−sin(2・π・(f1 +Δf1 )・(t−n/(f1 +Δf1 ))+θ1 )}
+Vm ・{sin(2・π・(fm +Δfm )・t+θm )
−sin(2・π・(fm +Δfm )・(t−n/(f1 +Δf1 ))+θm )}
=V1 ・{sin(2・π・(f1 +Δf1 )・t+θ1 )−sin(2・π・(f1 +Δf1 )・t+θ1 −2・π・n)}
+Vm ・{sin(2・π・(fm +Δfm )・t+θm )−sin(2・π・(fm +Δfm )・t+θm −2・π・n・(fm +Δfm )/(f1 +Δf1 ))}
=第1項(V1 の項)−第2項(Vm の項)
【0222】
数15の第1項と第2項については以下となる。
【0223】
[数16]
第1項(V1 の項)=V1 ・{sin(2・π・(f1 +Δf1 )・t+θ1 )−sin(2・π・(f1 +Δf1 )・t+θ1 −2・π・n)}
=0
【0224】
[数17]
第2項(Vm の項)=Vm ・{sin(2・π・(fm +Δfm )・t+θm )−sin(2・π・(fm +Δfm )・t+θm −2・π・n・(fm +Δfm )/(f1 +Δf1 ))}
【0225】
V1 の項は、(4−1)で述べた(数13参照)と同様に0である。しかし、Vm の項については、以下(A)、(B)のように特別な場合には0となるが、一般的には0とならない。
【0226】
即ち、数15の中でn・(fm +Δfm )/(f1 +Δf1 )=dとすると、以下の場合はΔVm =0となる。
【0227】
(A)各々にブレがない場合、すなわちΔfm =Δf1 =0の場合
これは、dは整数となるためである。数14参照。
【0228】
(B)Δfm /fm =Δf1 /f1 の場合、すなわち両者のブレ方が同じ割合の場合 これは、以下の計算でdは整数となるからである。
【0229】
[数18]
d=n・(fm +Δfm )/(f1 +Δf1 )
=n・(fm /f1 )・{((fm +Δfm )/fm )/((f1 +Δf1 )/f1 )}
=n・(fm /f1 )・{(1+Δfm /fm )/(1+Δf1 /f1 )}
=n・(fm /f1 )・{1}
=n・(fm /f1 )
【0230】
しかし、両者のブレ方(の割合)に差があると、すなわちΔfm /fm ≠Δf1 /f1 の場合、Δv(t)は0とならない。
【0231】
そこで、さらに次式に示すように、Δv(t)のT″=n/(fm +Δfm )前との差分(数15で差分をとっているので、それを合わせると2階差分(即ち、差分の差分)となる)をとる。Δ2v(t)の上付き2は、2階差分を表している。
【0232】
[数19]
Δ2v(t)=Δv(t)−Δv(t−n/(fm +Δfm )
=[V1 ・{sin(2・π・(f1 +Δf1 )・t+θ1 )
−sin(2・π・(f1 +Δf1 )・(t−n/(f1 +Δf1 ))+θ1 )}
+Vm ・{sin(2・π・(fm +Δfm )・t+θm )
−sin(2・π・(fm +Δfm )・(t−n/(f1 +Δf1 ))+θm )}]
−[V1 ・{sin(2・π・(f1 +Δf1 )・((t−n/(fm +Δfm )+θ1 )
−sin(2・π・(f1 +Δf1 )・((t−n/(f1 +Δf1 )−n/(fm +Δfm )+θ1 )}
+Vm ・{sin(2・π・(fm +Δfm )・(t−n/(fm +Δfm )+θm )
−sin(2・π・(fm +Δfm )・((t−n/(f1 +Δf1 )−n/(fm +Δfm )+θm )}]
=[V1 {第1項−第2項}+Vm {第3項−第4項}]
−[V1 {第5項−第6項}+Vm {第7項−第8項}]
【0233】
数19において、V1 、Vm に関する計算は以下である。
【0234】
(A)V1 に関する計算[{第1項−第2項}]−[{第5項−第6項}]
これは数15の第1項に示すとおり、{第1項−第2項}=0、{第5項−第6項}=0なので、それらの差も、[{第1項−第2項}]−[{第5項−第6項}]=0である。
【0235】
(B)Vm に関する項の計算([{第3項−第4項}]−[{第7項−第8項}])
これは次式で示す通り、こちらも0となる。
【0236】
[数20]
Δ2v(t)のVm に関する項の計算=[{第3項−第4項}]−[{第7項−第8項}]
=[sin(2・π・(fm +Δfm )・t+θm )−sin(2・π・(fm +Δfm )・(t−n/(f1 +Δf1 ))+θm )] ←第1括弧
−[sin(2・π・(fm +Δfm )・(t−n/(f1 +Δfm ))+θm )−sin(2・π・(fm +Δfm )・(t−n/(f1 +Δf1 )−n/(fm +Δfm ))+θm )] ←第2括弧
=[第1括弧1項−第1括弧2項]−[第2括弧1項−第2括弧2項]
=[第1括弧1項−第2括弧1項]−[第1括弧2項−第2括弧2項]
=[sin(2・π・(fm +Δfm )・t+θm )
−sin(2・π・(fm +Δfm )・(t−n/(f1 +Δfm ))+θm )]
−[sin(2・π・(fm +Δfm )・(t−n/(f1 +Δf1 ))+θm )
−sin(2・π・(fm +Δfm )・(t−n/(f1 +Δf1 )−n/(fm +Δfm ))+θm )]
=[sin(2・π・(fm +Δfm )・t+θm )−sin(2・π・(fm +Δfm )・t−2・π・n+θm )]
−[sin(2・π・(fm +Δfm )・t−2・π・n・(fm +Δfm )/(f1 +Δf1 )+θm )
−sin(2・π・(fm +Δfm )・t−2・π・n・(fm +Δfm )/(f1 +Δf1 )−2・π・n+θm )]
=[sin(2・π・(fm +Δfm )・t+θm )−sin(2・π・(fm +Δfm )・t+θm )]
−[sin(2・π・(fm +Δfm )・t−2・π・n・(fm +Δfm )/(f1 +Δf1 ))+θm )
−sin(2・π・(fm +Δfm )・t−2・π・n・(fm +Δfm )/(f1 +Δf1 )+θm )]
=[0]−[0]=0
【0237】
上記数19は、以下の性質を持つ。
【0238】
(A)系統周波数f1 や注入周波数fm が定常状態で少しブレた場合、その割合がそれぞれ違っても、偏差発生(即ち2階差分値が0でなくなること)は防止できる。
【0239】
(B)系統電圧に過渡変動(瞬低や単独運転)が発生した場合には、数19において現在値の変化がそのまま式の値に反映されるので即応できる。(数19の第1項と第3項の部分が現在値の変化に対応)
【0240】
前記図22、表3中の2階差分算出器131〜133は、数19を利用するものである。
【符号の説明】
【0241】
1 配電系統
18 連系点
20 分散電源保有設備
28 分散電源
30 単独運転検出装置
32 電流注入装置
34 同期制御装置
36 単独運転監視装置
42 第1監視回路
44 第1抽出器
46 第1補正器
48 第1判定器
50 第2監視回路
52 第2抽出器
54 第2判定器
56 継続判定器
58 論理積回路
Vs 連系点の電圧
Iinj 注入電流
Vm 、V11、V12、V21、V22、V20 注入次数の電圧
Vp 補助次数の電圧
D1 第1検出信号
D2 第2検出信号
D3 第3検出信号
D4 第4検出信号
DS 単独運転検出信号
【技術分野】
【0001】
この発明は、分散電源を有する分散電源保有設備が配電系統に接続された構成のシステムに適用されるものであって、当該分散電源保有設備内の分散電源が単独運転になったことを検出する単独運転検出装置に関する。
【背景技術】
【0002】
分散電源が単独運転になったことを検出する方式には、大別して、受動的方式および能動的方式がある(例えば非特許文献1参照)。
【0003】
能動的方式に属するものとして、分散電源保有設備から配電系統に当該配電系統の基本波の1倍よりも大きい非整数倍の注入周波数(換言すれば、注入次数。以下同様)の注入電流(換言すれば、次数間電流)を注入する電流注入装置と、分散電源保有設備と配電系統との連系点における電圧を測定して当該注入周波数の電圧を用いて、分散電源が単独運転になったことを検出する単独運転監視装置とを備えている単独運転検出装置が、従来から種々提案されている。この方式を、次数間電流注入方式と呼ぶことにする。
【0004】
例えば、特許文献1には、各分散電源保有設備から、上記のような注入周波数であってうなりを生じさせる二つの注入周波数(例えば2.6次および2.8次等)の注入電流を配電系統に注入し、かつうなりを同期させ、そして自設備の連系点における電圧に含まれている注入周波数電圧の増大から、自設備内の分散電源の単独運転を検出する単独運転検出装置が記載されている。
【0005】
この特許文献1に記載の単独運転検出装置を構成する単独運転監視装置の一例を図1に示す。
【0006】
この単独運転監視装置200は、連系点の電圧Vs から、離散フーリエ変換器202、204によって上記二つの注入周波数の電圧V21(例えば2.6次)、V22(例えば2.8次)をそれぞれ抽出し、それらの絶対値を絶対値演算器206、208によってそれぞれ演算し、判定器210、212によって各絶対値|V21|、|V22|を所定の判定値J21、J22とそれぞれ比較して前者が後者以上のときに検出信号S21、S22をそれぞれ出力するよう構成されている。更に、両検出信号S21、S22が共に出力されているときにAND回路214から検出信号S23を出力し、この検出信号S23が所定の継続確認時間継続すると継続判定器216から単独運転検出信号DSを出力するよう構成されている。
【0007】
特許文献2、非特許文献2については後述する。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開2009−11142号公報(段落0234−0243、図1−図2、図21)
【特許文献2】特開2002−40067号公報(段落0002−0011)
【非特許文献】
【0009】
【非特許文献1】「系統連系規程」、JEAC 9701−2006、社団法人日本電気協会 系統連系専門部会、平成18年8月30日第4版第2刷発行、頁44−50
【非特許文献2】「単独運転検出およびFRTへの取り組みについて」、(独)新エネルギー・産業技術総合開発機構(NEDO)、(経済産業省、次世代送配電システム制度検討会第1回第1ワーキンググループ、平成22年6月8日、経済産業省本館17階国際会議室における配付資料8)
【発明の概要】
【発明が解決しようとする課題】
【0010】
上記特許文献1に記載の単独運転検出装置を含めて、上記のような注入周波数の電流を注入し、かつ当該注入周波数の電圧を測定して単独運転検出を行うという次数間電流注入方式の単独運転検出装置は、配電系統の基本波とは異なる周波数を利用するので、他の能動方式(例えば、上記非特許文献1に記載の無効電力変動方式、周波数シフト方式等)の単独運転検出装置に比べて、定常的に基本波の影響を受けない、単独運転の高速検出性能に優れている等の特長を有しているけれども、瞬時電圧低下(以下「瞬低」と略称する)や系統周波数変動のような系統擾乱発生時に、不要動作(即ち、単独運転発生ではなく本来は検出すべきでないのに誤検出すること)を起こしやすい、という点になお改善の余地がある。
【0011】
その理由を簡単に説明すると、連系点電圧Vs を離散フーリエ変換した出力(即ち離散フーリエ変換器202、204の出力)には、瞬低発生によって、見かけ上のバックグラウンドノイズが含まれることになり、このバックグラウンドノイズは上記注入周波数付近でも大きな値を有していて、上記注入電流による注入周波数の電圧が当該バックグラウンドノイズに埋もれてしまうことが起こり、それによって上記不要動作を起こす。
【0012】
また、連系点電圧の測定を、サンプリング周波数が一定である固定周波数サンプリング方式で行っていると、離散フーリエ変換器202、204の出力には系統周波数変動によるリーケージエラーが含まれることになり、それによって上記注入周波数成分の抽出が乱されるので、上記不要動作を起こす原因となる。このようなリーケージエラーによる抽出誤差については、例えば、前記特許文献2(例えば段落0002−0006参照)にも記載されている。
【0013】
即ち、瞬低や系統周波数変動のような系統擾乱発生時に不要動作を起こさないことは、例えば前記非特許文献2においてFRT(Fault Ride Through)要件と呼ばれているように、単独運転検出において必要な要件であるが、上記のような従来の次数間電流注入方式の単独運転検出装置では、FRT要件と単独運転の高速検出とを両立させることが難しい、という点になお改善の余地がある。
【0014】
そこでこの発明は、上記のような次数間電流注入方式の単独運転検出装置において、系統擾乱(瞬低および周波数変動)発生時の不要動作防止と、単独運転の高速検出とを両立させることを主たる目的としている。
【課題を解決するための手段】
【0015】
この発明に係る単独運転検出装置の一つは、
分散電源を有する分散電源保有設備が配電系統に接続された構成のシステムに適用されるものであって、
前記分散電源保有設備側から前記配電系統に、当該配電系統の基本波の1倍よりも大きい非整数倍の注入次数の注入電流を注入する電流注入装置と、
前記分散電源保有設備と前記配電系統との連系点における前記注入次数の電圧を測定して当該注入次数の電圧を用いて、前記分散電源が単独運転になったことを検出して単独運転検出信号を出力する単独運転監視装置とを備えている単独運転検出装置において、
前記単独運転監視装置は、
(1)(a)前記連系点における電圧から、離散フーリエ変換によって、前記注入次数の高調波成分、前記注入次数の上側の非整数次数の上側次数成分および前記注入次数の下側の非整数次数の下側次数成分をそれぞれ抽出する第1抽出器と、
(b)前記第1抽出器で抽出した前記上側次数成分および下側次数成分の重みつき平均から、前記抽出した注入次数の高調波成分に含まれる前記配電系統の基本波成分に基づく誤差を補間演算し、かつ前記抽出した注入次数の高調波成分から当該誤差を減算して除去して、前記注入次数の電圧を抽出する第1補正器と、
(c)前記第1補正器から与えられる前記注入次数の電圧を所定の判定値と比較して、前記分散電源が単独運転になったことを検出して第1検出信号を出力する第1判定器とを有している第1監視回路と、
(2)(a)前記連系点における電圧から、離散フーリエ変換によって、前記注入次数±1次の範囲内にありかつ奇数次を除く次数である補助次数の電圧を、前記第1抽出器における計測期間よりも短い計測期間で抽出する第2抽出器と、
(b)前記第2抽出器から与えられる前記補助次数の電圧を所定の判定値と比較して、前記分散電源が単独運転になったことを検出して第2検出信号を出力する第2判定器と、
(c)前記第2判定器から与えられる前記第2検出信号が所定の継続確認時間継続したときに第3検出信号を出力する継続判定器とを有している第2監視回路と、
(3)前記第1監視回路から与えられる前記第1検出信号と前記第2監視回路から与えられる前記第3検出信号の論理積を取って前記単独運転検出信号を出力する論理積回路とを備えている、ことを特徴としている。
【0016】
この単独運転検出装置においては、第1監視回路を構成する第1抽出器および第1補正器によって、抽出した注入次数の高調波成分から配電系統の基本波成分に基づく誤差を除去することができるので、即ちリーケージエラーを小さくすることができるので、第1監視回路による単独運転検出において、系統周波数変動時の不要動作を防止することができる。
【0017】
第2監視回路で扱う上記補助次数は注入次数に近いので、単独運転発生時に補助次数の電圧は、注入次数の電圧と同じ方向に変化する。しかもこの補助次数には、短い計測期間で配電系統の基本波と分離することのできる次数を選択することができるので、これを用いることによって、第2抽出器によって第1抽出器よりも短い計測期間で補助次数の電圧を抽出することができる。従って、第2抽出器の応答速度を速くして、配電系統における過渡変動の発生・終了に対して高速に応答することができる。更に、継続判定器における継続確認時間によって、瞬低状態と単独運転状態とを区別することができる。これらによって、第2監視回路によって、瞬低発生時に不要動作を起こすことなく、単独運転を高速検出することができる。
【0018】
しかし、第2抽出器における計測期間を短くすると、それによって周波数分解能が低下して、系統周波数変動時のリーケージエラーが大きくなるので、第2監視回路は、系統周波数変動時に不要動作を起こす可能性がある。
【0019】
そこで、論理積回路によって、上記第1監視回路からの第1検出信号と第2監視回路からの第3検出信号との論理積を取ることにしており、これによって、系統擾乱(瞬低および周波数変動)発生時の不要動作防止と、単独運転の高速検出とを両立させることができる。
【0020】
前記注入次数を2次より大かつ3次より小にし、その場合の前記補助次数を2次または2.5次にしても良い。
【0021】
前記第2判定器は、(a)前記第2抽出器から与えられる前記補助次数の電圧について、現時点よりも前記配電系統の基本波の整数倍サイクル前の値と現時点の値との差分を算出する差分算出器と、(b)前記差分算出器から与えられる前記差分を所定の判定値と比較して、前者が後者以上のときに前記第2検出信号を出力する比較器とを有しているものでも良い。
【0022】
前記第2判定器において、前記第2抽出器から与えられる補助次数の電圧について、互いに異なる時間差の差分を直列に2回算出する2階差分を複数用いても良い。
【0023】
前記第1監視回路において、注入次数の電圧による判定の代わりに、連系点から見た配電系統の注入次数のアドミタンスまたはインピーダンスを求めて、それで分散電源が単独運転になったことを判定するようにしても良い。
【発明の効果】
【0024】
請求項1に記載の発明によれば、系統周波数変動時の不要動作を防止することができる第1監視回路と、瞬低発生時に不要動作を起こすことなく単独運転を高速検出することができる第2監視回路と、第1監視回路からの第1検出信号と第2監視回路からの第3検出信号との論理積を取る論理積回路とを備えているので、系統擾乱(瞬低および周波数変動)発生時の不要動作防止と、単独運転の高速検出とを両立させることができる。
【0025】
請求項2に記載の発明によれば次の更なる効果を奏する。即ち、補助次数を2次にすることによって、第2抽出器における計測期間を配電系統の基本波の1サイクル分の期間にすることができるので、第2抽出器の応答速度をより速くすることができる。その結果、配電系統における過渡変動の発生・終了に対してより高速に応答することができるので、その分、継続判定器における継続確認時間を短くすることができ、これらによって、第2監視回路において、瞬低状態と単独運転状態とをより短時間で区別することができる。ひいては、第2監視回路によって、瞬低発生時に不要動作を起こすことなく、単独運転をより高速で検出することができる。
【0026】
請求項3に記載の発明によれば次の更なる効果を奏する。即ち、半波加算コムフィルタによって配電系統の偶数次高調波成分のみを抽出することができるので、半波離散フーリエ変換器によって2次である補助次数の電圧を正しく分離して抽出することができる。その結果、半波加算コムフィルタおよび半波離散フーリエ変換器における合計の計測期間を配電系統の基本波の0.75サイクル分の期間にすることができるので、請求項2の場合に比べて、第2抽出器の応答速度をより速くすることができる。その結果、配電系統における過渡変動の発生・終了に対してより高速に応答することができるので、その分、継続判定器における継続確認時間を短くすることができ、これらによって、第2監視回路において、瞬低状態と単独運転状態とをより短時間で区別することができる。ひいては、第2監視回路によって、瞬低発生時に不要動作を起こすことなく、単独運転をより高速で検出することができる。
【0027】
請求項4に記載の発明によれば次の更なる効果を奏する。即ち、補助次数の2.5次は次数間高調波(即ち非整数倍次数の高調波)であるので、系統健全時の配電系統における電圧含有率が小さい。従って、第2判定器における判定が容易になる。しかも、補助次数を2.5次にすることによって、第2抽出器における計測期間を配電系統の基本波の2サイクル分の期間にすることができるので、第2抽出器の応答速度を速くすることができる。その結果、配電系統における過渡変動の発生・終了に対して高速に応答することができるので、その分、継続判定器における継続確認時間を短くすることができ、これらによって、第2監視回路において、瞬低状態と単独運転状態とを短時間で区別することができる。ひいては、第2監視回路によって、瞬低発生時に不要動作を起こすことなく、単独運転を高速で検出することができる。
【0028】
請求項5に記載の発明によれば次の更なる効果を奏する。即ち、補助次数の電圧レベルそのものよりも、当該電圧の所定時間前との差分(換言すれば変化分)の方が、単独運転発生時の変化がより速くかつより大きくなるので、単独運転発生をより速く判定して単独運転検出をより高速化することができる。
【0029】
請求項6に記載の発明によれば次の更なる効果を奏する。即ち、連系点電圧の測定を固定周波数サンプリング方式で行っている場合でも、定常状態において系統周波数および/または注入周波数(注入次数)が定格からブレた場合に、第2判定器から第2検出信号が出力されるのを防止することができるので、当該ブレによって不要動作が起こることを防止することができる。
【図面の簡単な説明】
【0030】
【図1】従来の単独運転検出装置を構成する単独運転監視装置の一例を示すブロック図である。
【図2】この発明に係る単独運転検出装置を有する分散電源保有設備が配電系統に接続された構成のシステムの一例を示す単線接続図である。
【図3】図2中の分散電源保有設備の構成の一例を示すブロック図である。
【図4】図3中の単独運転監視装置の構成の一例を示すブロック図である。
【図5】図4中の第1抽出器および第1補正器の構成の一例を示すブロック図である。
【図6】配電系統の基本波のリーケージエラーを除去する動作の一例を説明するための図である。
【図7】図4中の第1判定器の構成の一例を示すブロック図である。
【図8】第1監視回路の他の例を示すブロック図である。
【図9】図4中の第2抽出器を構成する回帰型離散フーリエ変換器の構成の一例を示すブロック図である。
【図10】図4中の第2判定器および継続判定器の構成の一例を示すブロック図である。
【図11】単独運転発生時をシミュレーションしたときの図4、図8、図10中の各部の信号の一例を示す図であり、図12へ続く。
【図12】単独運転発生時をシミュレーションしたときの図4、図8、図10中の各部の信号の一例を示す図であり、図11から続く。
【図13】瞬低発生時をシミュレーションしたときの図4、図8、図10中の各部の信号の一例を示す図であり、図14へ続く。
【図14】瞬低発生時をシミュレーションしたときの図4、図8、図10中の各部の信号の一例を示す図であり、図13から続く。
【図15】単独運転と瞬低の同時発生時をシミュレーションしたときの図4、図8、図10中の各部の信号の一例を示す図であり、図16へ続く。
【図16】単独運転と瞬低の同時発生時をシミュレーションしたときの図4、図8、図10中の各部の信号の一例を示す図であり、図15から続く。
【図17】ランプ状の周波数変動発生時をシミュレーションしたときの図4、図8、図10中の各部の信号の一例を示す図であり、図18へ続く。
【図18】ランプ状の周波数変動発生時をシミュレーションしたときの図4、図8、図10中の各部の信号の一例を示す図であり、図17から続く。
【図19】ステップ状の周波数変動発生時をシミュレーションしたときの図4、図8、図10中の各部の信号の一例を示す図であり、図20へ続く。
【図20】ステップ状の周波数変動発生時をシミュレーションしたときの図4、図8、図10中の各部の信号の一例を示す図であり、図19から続く。
【図21】図4中の第2抽出器の構成の他の例を示すブロック図である。
【図22】図4中の第2判定器の構成の他の例を示すブロック図である。
【図23】第1監視回路の更に他の例を示すブロック図である。
【発明を実施するための形態】
【0031】
(1)第1の実施形態
図2に、この発明に係る単独運転検出装置30を有する複数の分散電源保有設備20が配電系統1に接続されている構成のシステムの一例を示し、図3に、図2中の分散電源保有設備20の構成の一例を示す。
【0032】
各分散電源保有設備20内の単独運転検出装置30は、前述した次数間電流注入方式に属するものである。より具体的には、この実施形態ではうなりを利用するものであり、簡単に言えば、当該単独運転検出装置30の基本的な構成および図2に示すシステムの構成は、前記特許文献1に記載されているのと同様のものである。但し、単独運転検出装置30内の単独運転監視装置36の構成は異なる。
【0033】
図2に示すシステム(これは、分散電源連系システムと呼ぶこともできる)の構成は次のとおりである。なお、以下においては、自分の分散電源保有設備20を自設備20、当該自設備20が属する方の群を自群、属さない方の群を他群と呼んでいる。
【0034】
分散電源(図3中の分散電源28参照)をそれぞれ有する複数の分散電源保有設備20が第1群と第2群との2群に分類されて配電系統1に接続されている。
【0035】
配電系統1は、この例では、上位系統2に変電所4の変圧器6および遮断器8を介して高圧配電線10が接続され、この高圧配電線10に配電用変圧器14を介して低圧配電線16が接続された構成をしていて、この低圧配電線16に各分散電源保有設備20が接続されている。高圧配電線10には、負荷11および力率改善用コンデンサ12が接続されている。高圧配電線10の電圧は例えば6.6kV、低圧配電線16の電圧は例えば200Vである。
【0036】
各分散電源保有設備20は、図3に示すように、分散電源28、スイッチ22および単独運転検出装置30を有している。符号18は、当該分散電源保有設備20と配電系統1(具体的にはその低圧配電線16)との連系点である。
【0037】
単独運転検出装置30は、配電系統1(具体的にはその低圧配電線16)に後述する注入周波数の注入電流Iinj を注入する電流注入装置32と、うなりの同期制御を行う同期制御装置34と、自設備20内の分散電源28の単独運転を検出して単独運転検出信号DSを出力する単独運転監視装置36とを有している。
【0038】
このシステムでは、数1、表1にも示すように、うなりを生じさせる二つの注入周波数からそれぞれ成る2組の注入周波数であって、各組を成す二つの注入周波数間の周波数差Δfは両組で互いに同じであり、かつ両組を構成する四つの注入周波数f11、f12、f21、f22はそれぞれ異なると共に配電系統1の基本波周波数とも異なる第1組および第2組の注入周波数を用いる。各注入周波数は、配電系統1の基本波周波数の1倍よりも大きい非整数倍(即ち帯小数倍)の周波数にしている。
【0039】
[数1]
|f11−f12|=|f21−f22|=Δf
f11≠f12≠f21≠f22
【0040】
【表1】
【0041】
なお、この出願では、符号に添字11を有する物理量(周波数、電圧、電流等)と添字12を有する物理量とが第1組を示し、添字21を有する物理量と添字22を有する物理量とが第2組を示している。例えば、上記四つの周波数f11、f12、f21、f22は、それぞれ、110Hz(2.2次)、120Hz(2.4次)、130Hz(2.6次)、140Hz(2.8次)である。括弧内は、配電系統1の基本波(例えば50Hz=1次)に対する次数で表したものである。以下における例では、全て、ここに例示した周波数(次数)を用いている。但しこれに限られるものではない。
【0042】
この明細書においては、注入周波数の代わりに注入次数を用いて表現している場合もあるが、両者は等価である。
【0043】
第1群に属する分散電源保有設備20内の単独運転検出装置30を構成する電流注入装置32は、第1組の注入周波数の電流組I11、I12を含む注入電流Iinj を配電系統1に注入し、単独運転監視装置36は、他群の(即ち上記第2組の)注入周波数の電圧V21、V22、自群の(即ち上記第1組の)注入周波数の電圧V11、V12の内の少なくとも一つの電圧を測定して上記単独運転を検出する。
【0044】
第2群に属する分散電源保有設備20内の単独運転検出装置30を構成する電流注入装置32は、第2組の注入周波数の電流組I21、I22を含む注入電流Iinj を配電系統1に注入し、単独運転監視装置36は、他群の(即ち上記第1組の)注入周波数の電圧V11、V12、自群の(即ち上記第2組の)注入周波数の電圧V21、V22の内の少なくとも一つの電圧を測定して上記単独運転を検出する。
【0045】
同期制御装置34は、自設備20から注入する注入電流Iinj を構成する電流組の各電流の位相を、当該注入電流Iinj が生じさせるうなりである自設備うなりの位相に対して同一群内で共通した一定の位相関係に保つと共に、当該自設備うなりを、他群に属する分散電源保有設備20から注入する注入電流Iinj の総体が生じさせる電圧のうなりである他群うなりに同期させる。
【0046】
上記電流注入装置32および同期制御装置34の具体的な構成としては、例えば上記特許文献1、特開2010−166759号公報、特開2011−36066号公報等に記載されているような公知の技術を利用することができる。
【0047】
単独運転監視装置36の具体的な構成の例を、第1群の分散電源保有設備20用のものを例にして以下に詳述する。第2群の分散電源保有設備20用の単独運転監視装置36も、周波数の組が反対になる以外は、以下に説明するものと同様である。
【0048】
以下においては、前記注入周波数に相当する注入次数mを用いて説明する。即ち、注入次数mは、配電系統1の基本波の1倍よりも大きい非整数倍次数であり、例えば、前述したように、2.2次、2.4次、2.6次、2.8次の一つまたは複数である。
【0049】
図4に示すように、単独運転監視装置36は、アナログフィルタ38、A/D変換器40、第1監視回路42、第2監視回路50および論理積回路58を備えている。この単独運転監視装置36は、連系点18の電圧Vs の測定を、サンプリング周波数が一定である固定周波数サンプリング方式で行うものである。
【0050】
アナログフィルタ38は、ディジタル処理用にサンプリングを行う際の折り返し雑音(エイリアシング)防止用等のバンドパスフィルタであり、第1監視回路42において用いる注入次数mおよび第2監視回路50において用いる補助次数pの信号を通過させる。このアナログフィルタ38は必須のものではないけれども、それを設ける方が好ましい。
【0051】
A/D変換器40は、アナログ信号をディジタル信号に変換して、連系点電圧Vs に相当するディジタルの電圧Vsdを出力する。
【0052】
第1監視回路42は、第1抽出器44、第1補正器46および第1判定器48を備えている。
【0053】
第1抽出器44は、連系点電圧Vs から、より具体的にはそれをディジタルに変換した電圧Vsdから、離散フーリエ変換によって、注入次数mの高調波成分、注入次数mの上側の非整数次数の上側次数成分および注入次数mの下側の非整数次数の下側次数成分をそれぞれ抽出するものである。
【0054】
第1補正器46は、第1抽出器44で抽出した上側次数成分および下側次数成分の重みつき平均から、前記抽出した注入次数mの高調波成分に含まれる配電系統1の基本波成分に基づく誤差を補間演算し、かつ前記抽出した注入次数mの高調波成分から当該誤差を減算して除去して、前記注入次数mの電圧Vm を抽出するものである。
【0055】
第1判定器48は、第1補正器46から与えられる注入次数の電圧Vm を所定の判定値J1 と比較して、前記分散電源28が単独運転になったことを検出して第1検出信号D1 を出力するものである。
【0056】
なお、第1監視回路42は、図4では一つの注入次数mを扱う場合の例を示しているが、上記第1抽出器44、第1補正器46および第1判定器48をそれぞれ2以上ずつ設けて、2以上の互いに異なる注入次数mを扱うようにしても良い。例えば、後述する図8は、四つの注入次数mを扱う場合の例である。
【0057】
第1抽出器44および第1補正器46の構成の一例を図5に示す。
【0058】
第1抽出器44は、図5に示す例では、上記注入次数mの高調波成分Vm を抽出する離散フーリエ変換器60と、注入次数mの上側の(即ち注入次数mよりも少し大きい)非整数倍次数n1(例えばn1=m+0.1)の上側次数成分Vn1を抽出する離散フーリエ変換器62と、注入次数mの下側の(即ち注入次数mよりも少し小さい)非整数倍次数n2(例えばn2=m−0.1)の下側次数成分Vn2を抽出する離散フーリエ変換器64とを有している。
【0059】
各離散フーリエ変換器60、62、64には、例えば、図9に示す第2抽出器と同様の構成の回帰型離散フーリエ変換器を用いても良い。
【0060】
第1補正器46は、図5に示す例では、離散フーリエ変換器62、64からの信号をそれぞれ1/2倍して出力する演算器66、68と、離散フーリエ変換器60からの信号から両演算器66、68からの信号を減算することによって、次式の演算を行って、電圧Vc を出力する演算器70とを有している。この数2の右辺第2項は、上側次数成分Vn1および下側次数成分Vn2に共に1の重みをつけて平均を求める場合の例である。即ちこの場合は、通常の平均(相加平均)を求めることであり、この出願においては、重みつき平均には、その一態様として、通常の相加平均も含んでいる。
【0061】
[数2]
Vc =Vm −(Vn1+Vn2)/2
【0062】
上記構成によって、上記抽出した注入次数mの高調波成分Vm から、配電系統1の基本波成分に基づく誤差を除去することができる。
【0063】
これを図6を参照して説明する。上記注入次数m付近まで、配電系統1の基本波のリーケージエラーEが及んでいるものとする。上記上側次数n1、下側次数n2は注入次数mを挟んでおりかつ注入次数mに近いので、リーケージエラーEは、当然、上側次数n1および下側次数n2にも及んでおり、また上側次数n1と下側次数n2との間ではぼ線形変化すると考えても良い。各次数m、n1、n2におけるリーケージエラーEの大きさをそれぞれEm 、En1、En2とする。
【0064】
注入次数mのリーケージエラーEの大きさEm は、例えば次式の補間演算によって求めることができる。この式は、上記数2と同様に、リーケージエラーEn1およびEn2に共に1の重みをつけて平均を求める場合の例である。このEm が、注入次数mの高調波成分Vm に含まれる、配電系統1の基本波成分に基づく誤差である。
【0065】
[数3]
Em ≒(En1+En2)/2
【0066】
従って、上記のようなリーケージエラーEを含めて考えると、上記数2は次式で表すことができる。
【0067】
[数4]
Vc =(Vm +Em )−(En1+En2)/2
≒Vm
【0068】
この数4の第1行右辺第2項がリーケージエラーEn1、En2のみになっているのは、上側次数n1および下側次数n2は前述したように非整数次数であるのに対して、配電系統1の高調波成分は基本的に整数次(より具体的には奇数次)のみであって、上側次数n1および下側次数n2には存在しないので、上側次数n1および下側次数n2ではリーケージエラーEのみになり、これが上側次数成分Vn1および下側次数成分Vn2として抽出されるからである。この数4の第1行に数3を適用すると第2行となる。
【0069】
この数4から分かるように、離散フーリエ変換器64によって注入次数mの高調波成分Vm と共に抽出されるリーケージエラーEm を第1補正器46によって除去して、注入次数mの電圧Vm を正しく抽出してそれを電圧Vc として出力することができる。従って、固定周波数サンプリング方式を採用していても、リーケージエラーを小さくすることができる。
【0070】
なお、重みつき平均を求める場合の重みは、上側次数成分Vn1側と下側次数成分Vn2側とで互いに異ならせても良い。上記注入次数mと上側次数n1および下側次数n2との関係等に応じて決めれば良い。
【0071】
(a)第1抽出器44(具体的にはそれを構成する離散フーリエ変換器60、62、64)における計測期間は、後述する第2抽出器(具体的にはそれを構成する離散フーリエ変換器)における計測期間に比べて長くすることができる。高速応答性は第2監視回路50に任せているからである。例えば、この実施例では、第1抽出器44における計測期間は、系統基本波の10サイクル分の期間にしている。離散フーリエ変換器における計測期間は、所望周波数(所望次数)の電圧を他の次数電圧と正しく分離して抽出するためには、基本波周波数の整数倍である必要があるが、計測期間を10サイクルのように長くすると周波数分解能が高くなるため、第1抽出器44の特性上、系統の周波数変動によるリーケージエラーが小さくなる。但しこれと交換に、応答が遅くなるために、系統が正常に戻っても過渡変動の影響が長時間残ることになる。
【0072】
(b)更に、上述した第1抽出器44および第1補正器46による補正によって、計測期間が同じでも、リーケージエラーを小さくすることができる。
【0073】
上記(a)および(b)の理由によって、第1監視回路42による単独運転検出において、系統周波数変動時の不要動作(誤検出)を防止することができる。
【0074】
第1判定器48の構成の一例を図7に示す。この第1判定器48は、第1補正器46から与えられる注入次数mの電圧Vm の変化分ΔVm を判定する場合の例であり、絶対値演算器72、移動平均回路74、演算器76および比較器78を備えている。
【0075】
絶対値演算器72は、第1補正器46から与えられる注入次数mの電圧Vm の絶対値|Vm |を演算して出力する。
【0076】
移動平均回路74は、絶対値演算器72から与えられる絶対値|Vm |について、現在より過去における所定時間の移動平均Vmaを算出する。例えば、現在より1秒過去における1秒間の移動平均Vmaを算出する。
【0077】
演算器76は、上記絶対値|Vm |の変化分ΔVm を、次式に従って演算して出力する。即ち、変化分ΔVm は、この例では、Vmaに対する|Vm |の比率である。
【0078】
[数5]
ΔVm =|Vm |/Vma
【0079】
比較器78は、演算器76から与えられる変化分ΔVm を所定の判定値J1 と比較して、前者ΔVm が後者J1 以上のときに、前記第1検出信号D1 を出力する。判定値J1 は、系統健全時の上記変化分ΔVm と単独運転時の上記変化分ΔVm との間の値にしておけば良い。後述する判定値J1a、J1bについても同様である。
【0080】
図8は、前述したように、四つの注入次数mを扱う場合の第1監視回路42の例であり、図4〜図7に示した構成の第1抽出器44、第1補正器46、第1判定器48を四つずつと、論理積回路49とを備えている。各第1判定器48は、上記第1検出信号D1 の代わりに、検出信号S11〜S14をそれぞれ出力する。
【0081】
図8中の上2段の回路は、前述した自群の注入次数の電圧V11(2.2次)、V12(2.4次)をそれぞれ抽出し、それの変化分ΔV11、ΔV12を所定の判定値J1aとそれぞれ比較して、検出信号S11、S12をそれぞれ出力するものである。
【0082】
図8中の下2段の回路は、前述した他群の注入次数の電圧V21(2.6次)、V22(2.8次)をそれぞれ抽出し、それの変化分ΔV21、ΔV22を所定の判定値J1bとそれぞれ比較して、検出信号S13、S14をそれぞれ出力するものである。
【0083】
四つの第1判定器48における判定値J1a、J1bは、互いに同じ値でも良いし、異なる値でも良い。判定する差分ΔV11、ΔV12、ΔV21、ΔV22に応じて決めれば良い。例えば、図8の例では、二つの判定値J1aは共に1.5、二つの判定値J1bは共に8に設定している。
【0084】
論理積回路49は、四つの検出信号S11〜S14の論理積(AND)を取って上記第1検出信号D1 を出力するものである。
【0085】
再び図4を参照して、第2監視回路50は、第2抽出器52、第2判定器54および継続判定器56を備えている。
【0086】
第2抽出器52は、連系点電圧Vs から、より具体的にはそれをディジタルに変換した電圧Vsdから、離散フーリエ変換によって、前記注入次数m±1次の範囲内にありかつ奇数次を除く次数である補助次数pの電圧Vp を、前記第1抽出器44における計測期間よりも短い計測期間で抽出するものである。
【0087】
補助次数pを注入次数m±1次の範囲内にすることによって、補助次数pは注入次数mに近くなるので、単独運転発生時に、補助次数pの電圧Vp は、注入次数mの電圧Vm (または後述する注入次数mのアドミタンスもしくはインピーダンス)と同じ方向に変化する(具体的には、電圧またはインピーダンスは大きくなる方向に変化し、アドミタンスは小さくなる方向に変化する)。
【0088】
しかも、補助次数pが注入次数m±1次の範囲内であれば、その次数の電圧Vp 等において、系統健全時と単独運転発生時とを区別する判定値を設けることができる含有率の差が発生するので、補助次数pの電圧Vp 等を用いることによっても、単独運転検出を行うことができる。例えば、注入次数mが前述した2.2次、2.4次、2.6次および2.8次の分散注入の場合、補助次数pを2次とすると、その次数の電圧Vp の差分ΔVp は、系統健全時は約0%、単独運転発生時は約0.3%よりも大きくなるので、判定値J2 を0.3%にすることによって、単独運転検出を行うことができる。
【0089】
補助次数pから奇数次を除外しているのは、配電系統1には元々奇数次高調波の含有率が高く、しかも少しの系統条件の変動で奇数次高調波成分も変化するので、奇数次を補助次数pに用いるのは好ましくないからである。
【0090】
補助次数pとして注入次数mと同じ次数を用いても良い場合もあるが、第2監視回路50(具体的には第2抽出器52)において注入次数mを用いずに補助次数pを用いるのは次の理由による。
【0091】
即ち、第2抽出器52において、所望の次数を系統基本波から正しく分離して抽出するためには、当該第2抽出器における計測期間を、系統基本波の整数倍にする必要がある(これは第1抽出器44においても同様である)。注入次数mが例えば2.5次の場合は、計測期間を系統基本波の2サイクルにすることができるので(それによって上記整数倍になるから)、この場合は補助次数pとして注入次数mと同じ2.5次を用いても良い。しかし、注入次数mが例えば2.2次の場合は、計測期間は5サイクル必要になるから(それによって上記整数倍になるから)、この場合は、補助次数pとして注入次数mとは別の次数を用いる方が、計測期間を短くすることができる。
【0092】
つまり上記のような範囲の補助次数pを用いることによって、第2抽出器52において、短い計測期間で系統基本波と分離することができる次数をある程度自由に選択することができるので、これを用いることによって、第2抽出器52の応答速度を速くして、配電系統1における過渡変動の発生・終了に対して高速に応答することができるようになる。
【0093】
前記第1抽出器44における計測期間は、例えば、系統基本波の5サイクル分または10サイクル分等の期間である。第2抽出器52における計測期間は、例えば、補助次数pが2次の場合、系統基本波の1サイクル分または半サイクル分の期間であり、補助次数pが2.5次の場合は2サイクル分の期間である。
【0094】
第2判定器54は、第2抽出器52から与えられる補助次数の電圧Vp を所定の判定値J2 と比較して、前記分散電源28が単独運転になったことを検出して第2検出信号D2 を出力するものである。
【0095】
継続判定器56は、第2判定器54から与えられる第2検出信号D2 が所定の継続確認時間継続したときに第3検出信号D3 を出力するものである。
【0096】
第2抽出器52の構成の一例を図9に示す。第2抽出器52は、通常の離散フーリエ変換器で構成しても良いけれども、この例では、離散フーリエ変換の演算を繰り返して行う際に一つ前の演算結果をその次の演算に用いる回帰型離散フーリエ変換器によって構成している。このような回帰型離散フーリエ変換器は、例えば特許第3921235号公報等にも記載されており、公知のものである。
【0097】
この回帰型離散フーリエ変換器(即ち第2抽出器52)は、信号を加算および減算する加減算器82、信号を遅延させる遅延回路84、86、信号に係数を掛ける演算器88、90を備えている。図中のZは単位遅延演算子、Nは計測期間におけるサンプル数、aは次式で表される回転因子、jは虚数単位、kは計測期間での次数、2/Nは係数である。例えば、上記補助次数pを2次、計測期間を系統基本波の1サイクル分の期間とする場合、N=128、k=2である。補助次数pを2.5次、計測期間を系統基本波の2サイクル分の期間としても良い。
【0098】
[数6]
a=exp(−j2πk/N)
【0099】
この第2抽出器52は、計測期間を第1抽出器44のものよりも短くしているので、上記第1抽出器44の利点および欠点とは反対の利点および欠点を有している。即ち、計測期間が短くて応答が速いために、系統が正常に戻ると過渡変動の影響から速やかに脱却することができる。但しこれと交換に、計測期間が短いために周波数分解能が低く、系統の周波数変動によってリーケージエラーの影響を受ける度合が高くなる。
【0100】
第2判定器54および継続判定器56の構成の一例を図10に示す。
【0101】
この第2判定器54は、第2抽出器52から与えられる補助次数pの電圧Vp の差分ΔVp を判定する場合の例であり、差分算出器92、絶対値演算器98および第1の比較器100を備えている。
【0102】
差分算出器92は、上記補助次数pの電圧Vp について、現時点よりも系統基本波の整数倍サイクル前(例えば5サイクル前、10サイクル前等)の値と現時点との差分ΔVp を算出するものであり、遅延回路94および減算器96を有している。遅延回路94は、上記電圧Vp を上記整数倍サイクル分遅延して出力する。減算器96は、第2抽出器52から与えられる電圧Vp から、遅延回路94から与えられる電圧を減算して、上記差分ΔVp を出力する。通常状態で系統電圧の変動がなければ、上記電圧Vp の変動もないので、上記差分ΔVp は0となる。
【0103】
絶対値演算器98は、減算器96から与えられる差分ΔVp の絶対値を演算して出力する。但しこの絶対値演算器98は、必ず設けなくてはならないものではない。
【0104】
比較器100は、絶対値演算器98から与えられる差分ΔVp の絶対値|ΔVp |を判定値J2 と比較して、前者|ΔVp |が後者がJ2 以上のときに上記第2検出信号D2 を出力する。判定値J2 は、系統健全時の上記差分ΔVp と単独運転時の上記差分ΔVp との間の値にしておけば良い。例えば、2次の電圧Vp の差分ΔVp を判定する場合、判定値J2 は前述したように0.3%(0.003pu)程度にすれば良く、この実施例では0.3%にしている。
【0105】
なお、第2判定器54は上記例のように電圧Vp の差分ΔVp (より具体的にはその絶対値|ΔVp |)を比較器100によって判定する代わりに、電圧Vp の電圧レベル(即ち電圧Vp の絶対値)そのものを比較器100によって判定するものでも良い。但し、差分ΔVp を判定する方が、単独運転発生時の変化がより速くかつより大きくなるので、単独運転をより速く判定して単独運転検出をより高速化することができる。
【0106】
継続判定器56は、この例では、オフディレイタイマ102および継続判定器104を備えている。
【0107】
オフディレイタイマ102は、上記第2検出信号D2 を受けるタイマであって、オフするタイミングを所定時間遅らせるものである。これによって、上記第2検出信号D2 にチャタリング(極短時間の断続)が含まれていても、それをオン優先で修正してチャタリングを含まない矩形波状の第4検出信号D4 を出力することができる。オフディレイ時間は、第2検出信号D2 に含まれる可能性のあるチャタリングの時間幅よりもある程度長くしておけば良く、例えば系統基本波の半サイクル分(50Hzで10m秒)である。このようなオフディレイタイマ102を設けておく方が、チャタリングを含まない検出信号を出力することができるので好ましい。
【0108】
継続判定器104は、上記第4検出信号D4 が所定の継続確認時間T1 のあいだ継続していることを判定して上記第3検出信号D3 を出力する。この継続確認時間T1 は、例えば、次のようにして定めれば良い。
【0109】
(a)上記差分算出器92において差分ΔVp を求める時間差を系統基本波の10サイクル分とすると、単独運転発生時(瞬低の同時発生の有無を問わない)、単独運転の継続に伴って、第2判定器54は上記10サイクル分の間、第2検出信号D2 を出力する。10サイクル前と現在との差分ΔVp を判定に用いるからである。
【0110】
(b)一方、瞬低発生時(単独運転を伴わない場合)、単独運転の継続はなく瞬低のみであるので、第2判定器54は第2抽出器52における計測期間+α(αは、アナログフィルタ38による影響等を考慮した期間)しか第2検出信号D2 を出力しない。例えば、第2抽出器52における計測期間を系統基本波の1サイクル分とし、αを0.5サイクル分とすると、第2判定器54は系統基本波の1.5サイクル分程度の間しか第2検出信号D2 を出力しない。
【0111】
従って、上記継続確認時間T1 は、瞬低による不要動作を防止するために上記(b)の1.5サイクル分の時間より長く、かつ単独運転を検出するために上記(a)の10サイクル分の時間よりも短い範囲内で、短めに(これは高速検出のためである)定めれば良い。それによって、第2監視回路50は、瞬低発生時に不要動作を起こすことなく、単独運転を高速で検出することができる。この実施例では、一例として、上記継続確認時間T1 を、系統基本波の2.5サイクル分の時間(50Hzで50m秒)に定めている。
【0112】
再び図4を参照して、論理積回路58は、上記第1監視回路42から与えられる第1検出信号D1 と第2監視回路50から与えられる第3検出信号D3 の論理積(AND)を取って、両検出信号D1 、D3 が共に出力されているときに上記単独運転検出信号DSを出力する。この単独運転検出信号DSの出力によって、単独運転監視装置36は、最終的に、それが設けられている自設備20内の分散電源28が単独運転になったことを検出したことになる。
【0113】
単独運転監視装置36による単独運転検出後に分散電源28の解列を行うには、例えば、上記単独運転検出信号DSによって図3に示すスイッチ22を開放すれば良い。
【0114】
以上説明したように、この単独運転検出装置30においては、第1監視回路42を構成する第1抽出器44および第1補正器46によって、抽出した注入次数mの高調波成分から配電系統1の基本波成分に基づく誤差を除去することができるので、即ちリーケージエラーを小さくすることができるので、第1監視回路42による分散電源28の単独運転検出において、系統周波数変動時の不要動作を防止することができる。
【0115】
第2監視回路50で扱う上記補助次数pは注入次数mに近いので、単独運転発生時に補助次数pの電圧Vp は、注入次数mの電圧Vm と同じ方向に変化する。しかもこの補助次数pには、短い計測期間で配電系統1の基本波と分離することのできる次数を選択することができるので、これを用いることによって、第2抽出器52によって第1抽出器44よりも短い計測期間で補助次数pの電圧Vp を抽出することができる。従って、第2抽出器52の応答速度を速くして、配電系統1における過渡変動の発生・終了に対して高速に応答することができる。更に、継続判定器56における継続確認時間T1 によって、瞬低状態と単独運転状態とを区別することができる。これらによって、第2監視回路50によって、瞬低発生時に不要動作を起こすことなく、分散電源28の単独運転を高速検出することができる。
【0116】
しかし、第2抽出器52における計測期間を短くすると、それによって周波数分解能が低下して、系統周波数変動時のリーケージエラーが大きくなるので、第2監視回路50は、系統周波数変動時に不要動作を起こす可能性がある。
【0117】
そこで、論理積回路58によって、上記第1監視回路42からの第1検出信号D1 と第2監視回路50からの第3検出信号D3 との論理積を取ることにしており、これによって、前述したFRT要件である系統擾乱(瞬低および周波数変動)発生時の不要動作防止と、分散電源28の単独運転の高速検出とを両立させることができる。
【0118】
また、注入次数mが2次より大かつ3次より小の場合、補助次数pとして2次を使用することができる。補助次数pを2次にすることによって、第2抽出器52における計測期間を配電系統1の基本波の1サイクル分の期間にすることができるので、第2抽出器52の応答速度をより速くすることができる。その結果、配電系統1における過渡変動の発生・終了に対してより高速に応答することができるので、その分、継続判定器56における継続確認時間T1 を短くすることができ、これらによって、第2監視回路50において、瞬低状態と単独運転状態とをより短時間で区別することができる。ひいては、第2監視回路50によって、瞬低発生時に不要動作を起こすことなく、分散電源28の単独運転をより高速で検出することができる。
【0119】
注入次数mが2次より大かつ3次より小の場合、補助次数pとして2.5次を使用することもできる。補助次数pの2.5次は次数間高調波(即ち非整数倍次数の高調波)であるので、系統健全時の配電系統1における電圧含有率が小さい。例えば、系統健全時の含有率は、2次が0.1%程度あるのに対して、2.5次は0.01%程度しかなく0に近いので、単独運転発生を区別しやすい。従って2.5次の方が、第2判定器54における判定が容易になる。その結果例えば、第2判定器54において、補助次数pの電圧Vp の差分ΔVp ではなく、電圧Vp の絶対値で判定することも可能になり、それによって第2判定器54の構成の簡素化を図ることができる。
【0120】
しかも、補助次数pを2.5次にすることによって、第2抽出器52における計測期間を配電系統1の基本波の2サイクル分の期間にすることができるので、補助次数pが2次の場合ほどではないとしても、第2抽出器52の応答速度を速くすることができる。その結果、配電系統1における過渡変動の発生・終了に対して高速に応答することができるので、その分、継続判定器56における継続確認時間T1 を短くすることができ、これらによって、第2監視回路50において、瞬低状態と単独運転状態とを短時間で区別することができる。ひいては、第2監視回路50によって、瞬低発生時に不要動作を起こすことなく、分散電源28の単独運転を高速で検出することができる。
【0121】
(2)シミュレーション結果
図2に示したシステムを模擬したシミュレーションモデルを用いてシミュレーションを行った結果を図11〜図20に示す。
【0122】
当該シミュレーションモデルでは、上位系統2および高圧配電線10のインピーダンスを30+j48%(10MVAベース)とし、配電用変圧器14のインピーダンスをj5%(10kVAベース)とし、負荷11を800kWとし、出力10kWの分散電源28を有する80台(第1群用が40台、第2群用が40台)の分散電源保有設備20が同じ配電用変圧器14に接続されているものとし、各分散電源保有設備20内の各電流注入装置32から0.58Aの注入電流Iinj をそれぞれ注入するものとした。
【0123】
そして、自設備20を第1群に属するものとし、その単独運転検出装置30内の単独運転監視装置36は、上記図4〜図10に示す構成のものとした。但し、第1監視回路42は図8に示すものとした。従って以下においては、これらの図中(特に図4、図8、図10中)の符号をも参照するものとする。
【0124】
このシミュレーションにおいて採用した各種の設定値等を再度記載すると、系統基本波は50Hz、各第1抽出器44(具体的にはその離散フーリエ変換器)における計測期間を系統基本波の10サイクル分、判定値J1aを1.5、判定値J1bを8、補助次数pを2次、第2抽出器52(具体的にはその離散フーリエ変換器)における計測期間を系統基本波の1サイクル分、第2判定器54内の差分算出器92において系統基本波の10サイクル前からの変化分検出、判定値J2 を0.3%(0.003pu)、継続判定器56内のオフディレイタイマ102におけるオフディレイ時間を系統基本波の半サイクル分(10m秒)、継続判定器104における継続確認時間T1 を系統基本波の2.5サイクル分(50m秒)とした。
【0125】
なお、図11〜図20中の信号D2 〜D4 の縦軸の目盛は、作図ソフトの都合で−1〜2まで表示しているが、論理値であるので「0」と「1」が正しい。
【0126】
このシミュレーションの結果だけを先にまとめて表2に示す。その中身は以下において説明する。
【0127】
【表2】
【0128】
(2−1)単独運転発生時
変電所4の遮断器8が開放されて単独運転が発生した(即ち、分散電源保有設備20内の分散電源28が単独運転になった)場合を図11、図12に示す。連系点電圧Vs には、系統基本波以外に、補助次数p(2次)の高調波および注入次数m(2.1次等)の高調波を含有させている。
【0129】
図11(A)に示すように、2.0秒の時点で単独運転を発生させた。分散電源保有設備20内の分散電源28が発電をしているので連系点電圧Vs に大きな変化はないが、図11(B)に示すように、第2抽出器52において測定している補助次数の電圧Vp は、単独運転発生に伴って増大している。これは、遮断器8が開放されたことによって、低インピーダンスの上位系統2が切り離されて遮断器8よりも下流側の配電系統1のインピーダンスが増大し、それによって補助次数に近い注入次数成分(主に2.2次、2.4次)の電圧の含有率が急増したことによる。即ち、第2抽出器52では、計測期間を系統基本波の1サイクル分としているため、整数次の高調波しか分離することはできず、補助次数(2次)に近い2.2次、2.4次等の注入次数成分も上記電圧Vp に含まれて第2抽出器52から出力されるが、単独運転発生に伴う上記インピーダンス増大によって、その含有率が急増するからである。
【0130】
上記に伴って、図11(C)に示すように、補助次数の電圧の差分ΔVp も増大するが、2.2秒付近では小さくなる。これは、前述したように第2判定器54において系統基本波の10サイクル前との変化分検出を行っているためである。
【0131】
上記に伴って、図11(D)に示すように、差分ΔVp が判定値J2 以上の間、第2判定器54から第2検出信号D2 が出力される。良く見ると、この第2検出信号D2 の立上り時にチャタリングが生じている。このチャタリングは、前述したオフディレイタイマ102によって除去されて、図11(E)に示す矩形波状の第4検出信号D4 が出力される。この第4検出信号D4 は、オフディレイタイマ102におけるオフディレイ時間だけ第2検出信号D2 よりも長くなる。
【0132】
この第4検出信号D4 が上記継続確認時間T1 だけ継続した時点で、継続判定器56から図12(A)に示すように第3検出信号D3 が出力される。これによって、第2監視回路50が単独運転を検出したことになる(表2中のBも参照)。
【0133】
一方、上述したように単独運転発生(即ち遮断器8の開放)に伴って、低インピーダンスの上位系統2が切り離されて遮断器8よりも下流側の配電系統1のインピーダンスが増大するので、第1監視回路42(図8参照)において判定している各注入次数電圧の変化分ΔV11、ΔV12、ΔV21、ΔV22は、図12(B)〜(E)に示すように急増して、各判定値J1a、J1b以上になる(図中黒丸印参照)。即ち、図8中の検出信号S11〜S14が全て出力され、その内で最も遅い時刻t1 において四つの検出信号S11〜S14のANDが成立して第1検出信号D1 が出力される。これによって、第1監視回路42が単独運転を検出したことになる(表2中のAも参照)。
【0134】
そして、時刻t1 の時点では第3検出信号D3 は既に出力されているので(図12(A)参照)、時刻t1 の時点で第1検出信号D1 と第3検出信号D3 のANDが成立して、論理積回路58から、即ち単独運転監視装置36から単独運転検出信号DSが出力される。これによって、単独運転監視装置36は正式に分散電源28の単独運転を検出したことになる。図12に示すように、単独運転発生から時刻t1 までは0.1秒以内であり、0.1秒以内の高速検出を実現することができている。
【0135】
ちなみに、電気設備技術基準の解釈第19条によれば、地絡事故発生後に分散電源の解列が完了するまでの時間として1秒以内が求められており、変電所4の遮断器8は、通常、地絡事故検出後、約0.9秒で解列するので、残された0.1秒以内という高速で分散電源の単独運転を検出することが要請されているが、上記単独運転監視装置36でこれを満たすことができることが確かめられた。
【0136】
(2−2)瞬低発生時
系統擾乱の例として瞬低が発生した場合を図13、図14に示す。
【0137】
図13(A)は、電圧位相が90度である2.0秒の時点で瞬低が発生し、残電圧が20%となり、0.1秒後に回復したときの連系点電圧Vs を示す。
【0138】
瞬低発生によって連系点電圧Vs が急変してその基本波成分の周期性が崩れるので、その過渡変動で第2抽出器52において大きな抽出誤差が発生し、それが図13(B)に示すように注入次数の電圧Vp に含まれる。
【0139】
上記に伴って、図13(C)に示すように、注入次数の電圧の差分ΔVp も増大する。2.2秒後付近と2.3秒後付近でも増大しているのは、前述したように第2判定器54において系統基本波10サイクル前との変化分検出を行っているためである。
【0140】
上記に伴って、図13(D)に示すように、差分ΔVp が判定値J2 以上の間、第2判定器54から第2検出信号D2 が出力され、それに伴って、図13(E)に示すように、オフディレイタイマ102から第4検出信号D4 が出力される。
【0141】
この第4検出信号D4 は、上記継続確認時間T1 以上には継続しないので、継続判定器56からは図14(A)に示すように第3検出信号D3 は出力されない。即ち、第2監視回路50は瞬低発生時には不要動作しない(表2中のDも参照)。
【0142】
一方、連系点電圧Vs を離散フーリエ変換した出力(即ち第1監視回路42の第1抽出器44の出力)には、瞬低発生によって、見かけ上のバックグラウンドノイズが含まれることになり、このバックグラウンドノイズは注入次数m付近でも大きな値を有しているので、第1監視回路42において測定している各注入次数電圧の変化分ΔV11、ΔV12、ΔV21、ΔV22は、図14(B)〜(E)に示すように急増して、全て各判定値J1a、J1b以上になる(図中黒丸印参照)。従って、第1監視回路42から第1検出信号D1 が出力されるが、この場合は単独運転ではないので不要動作したことになる(表2中のCも参照)。
【0143】
しかしこの単独運転監視装置36では、前述したように、論理積回路58において第1検出信号D1 と第3検出信号D3 のANDを取ることにしており、上記のように第3検出信号D3 は出力されないので、単独運転監視装置36から単独運転検出信号DSは出力されない。即ち、第1監視回路42における不要動作を第2監視回路50によってブロックして、瞬低発生時の不要動作(誤検出)を防止することができている。
【0144】
(2−3)単独運転と瞬低の同時発生時
変電所4の遮断器8が開放されて単独運転が発生するのと同時に瞬低が発生した場合を図15、図16に示す。これらは、上記図11、図12に示す単独運転発生と図13、図14に示す瞬低発生とを合せたものに相当するのでそれらとの相違点を主体に説明する。なお、遮断器8が開放されて単独運転が発生すると、上位系統2からの電流供給が絶たれるので、分散電源保有設備20内の分散電源28の合計出力よりも、各分散電源保有設備20内の負荷や負荷11等の合計負荷の方が大きい場合に瞬低が同時に起こり得るので、それを模擬したものである。
【0145】
単独運転の発生状況および瞬低の発生状況は先のシミュレーションの場合と同じである。この場合の連系点電圧Vs 、注入次数の電圧Vp 、その差分ΔVp を図15(A)〜(C)に示す。これらは、図11(A)〜(C)と図13(A)〜(C)とを合わせたものに相当する。図15(B)に示すように、注入次数の電圧Vp は、瞬低発生直後と終了直後の間でもレベルが高いが、これは単独運転によるものである。
【0146】
その結果、図15(D)、(E)に示すように、検出信号D2 、D4 は長く出力され、第4検出信号D4 が上記継続確認時間T1 だけ継続した時刻t2 の時点で、図16(A)に示すように第2監視回路50から第3検出信号D3 が出力される。これによって、第2監視回路50が単独運転を検出したことになる(表2中のFも参照)。
【0147】
一方、単独運転発生および瞬低発生に伴って、上述したのと同様の理由によって、各注入次数電圧の変化分ΔV11、ΔV12、ΔV21、ΔV22は、図16(B)〜(E)に示すように急増して、時刻t2 より前の時点で各判定値J1a、J1b以上になる(図中黒丸印参照)。従って、上述したのと同様の動作によって、時刻t2 より前の時点で第1監視回路42から第1検出信号D1 が出力される。これによって、第1監視回路42が単独運転を検出したことになる(表2中のEも参照)。
【0148】
従って、時刻t2 の時点で第1検出信号D1 と第3検出信号D3 のANDが成立して、論理積回路58から、即ち単独運転監視装置36から単独運転検出信号DSが出力される。これによって、単独運転監視装置36は正式に分散電源28の単独運転を検出したことになる。図16に示すように、単独運転発生から時刻t1 までは0.1秒以内であり、0.1秒以内の高速検出を実現することができている。
【0149】
(2−4)ランプ状の周波数変動発生時
系統擾乱の例として、ランプ状(傾斜状)の系統周波数変動が発生した場合を図17、図18に示す。
【0150】
図17(A)に示すように、2.0秒の時点から−2Hz/秒の傾きで周波数低下を開始した。従って例えば、時刻t3 (2.2秒)の時点では−0.4Hzの周波数低下状態にある。
【0151】
この系統周波数変動により、図17(B)、(C)に示すように、補助次数の電圧Vp およびその差分ΔVp は少しずつ大きくなっている。差分ΔVp は時刻t3 より少し前から判定値J2 以上になっているけれども、判定値J2 の取り方によっては、この例のように差分ΔVp が細かい周期で判定値J2 以上になり、図17(D)に示すように第2検出信号D2 は出力されるけれどもそれが細かい周期で断続する場合がある。これも一種のチャタリングと言える。
【0152】
しかし、オフディレイタイマ102におけるオフディレイ時間はこの第2検出信号D2 の断続周期よりも長いので、図17(E)に示すように、チャタリングが除去されて、矩形波状の第4検出信号D4 が出力される。
【0153】
この第4検出信号D4 が上記継続確認時間T1 だけ継続した時点で、継続判定器56から図18(A)に示すように第3検出信号D3 が出力されるけれども、この場合は単独運転ではないので第2監視回路50は不要動作したことになる(表2中のHも参照)。
【0154】
しかし、前述したように第1監視回路42は計測期間が長く、かつ第1補正器46も有していて、系統周波数変動に対してリーケージエラーが小さいので、図18(B)〜(E)に示すように、各注入周波数電圧の変化分ΔV11、ΔV12、ΔV21、ΔV22は、系統周波数変動の影響を殆ど受けず、判定値J1a、J1bよりも小さい状態を保っている。従って、第1監視回路42からは第1検出信号D1 は出力されない。即ち、第1監視回路42は不要動作しない(図2中のGも参照)。
【0155】
そしてこの単独運転監視装置36では、前述したように、論理積回路58において第1検出信号D1 と第3検出信号D3 のANDを取ることにしており、上記のように第1検出信号D1 は出力されないので、単独運転監視装置36から単独運転検出信号DSは出力されない。即ち、第2監視回路50における不要動作を第1監視回路42によってブロックして、ランプ状の周波数変動発生時の不要動作(誤検出)を防止することができている。
【0156】
(2−5)ステップ状の周波数変動発生時
系統擾乱の例として、ステップ状の系統周波数変動が発生した場合を図19、図20に示す。
【0157】
図19(A)に示すように、2.0秒の時点から+0.8Hzの周波数ステップ上昇を開始してそれを3サイクルの間続けた後、同じ割合で周波数をステップ下降させて元へ戻した。
【0158】
この系統周波数変動により、図19(B)、(C)に示すように、補助次数の電圧Vp およびその差分ΔVp は大きくなり、差分ΔVp が判定値J2 以上になり、図19(D)に示すように第2検出信号D2 が出力され、更に図19(E)に示すように第4検出信号D4 が出力される。
【0159】
この第4検出信号D4 が上記継続確認時間T1 だけ継続した時点で、継続判定器56から図20(A)に示すように第3検出信号D3 が出力されるけれども、この場合は単独運転ではないので第2監視回路50は不要動作したことになる(表2中のJも参照)。
【0160】
しかし、前述したように第1監視回路42は計測期間が長く、かつ第1補正器46も有していて、系統周波数変動に対してリーケージエラーが小さいので、図20(B)〜(E)に示すように、各注入周波数電圧の変化分ΔV11、ΔV12、ΔV21、ΔV22は、系統周波数変動の影響を殆ど受けず、判定値J1a、J1bよりも小さい状態を保っている。従って、第1監視回路42からは第1検出信号D1 は出力されない。即ち、第1監視回路42は不要動作しない(図2中のIも参照)。
【0161】
そしてこの単独運転監視装置36では、前述したように、論理積回路58において第1検出信号D1 と第3検出信号D3 のANDを取ることにしており、上記のように第1検出信号D1 は出力されないので、単独運転監視装置36から単独運転検出信号DSは出力されない。即ち、第2監視回路50における不要動作を第1監視回路42によってブロックして、ステップ状の周波数変動発生時の不要動作(誤検出)を防止することができている。
【0162】
以上のように、シミュレーションによっても、上記単独運転監視装置36によれば、FRT要件である系統擾乱(瞬低および周波数変動)発生時の不要動作防止と、単独運転の高速検出とを両立させることができることが確かめられた。
【0163】
なお、表2中のK〜Nについて、単独運転発生前に系統周波数変動があっても、単独運転発生後は系統から切り離されるから、その系統周波数変動は単独運転検出に影響しない。従ってこの場合は、シミュレーションを行うまでもなく、表2中のA、Bの場合と同様に、正しく単独運転検出を行うことができることが分る。
【0164】
(3)他の実施形態
(3−1)第2抽出器52の他の例
注入次数mを2次より大かつ3次より小にし、かつ補助次数pを2次にする場合、第2監視回路50を構成する第2抽出器52は、図9に示したものの代わりに、図21に示すものとしても良い。この第2抽出器52は、半波加算コムフィルタ106と半波離散フーリエ変換器114とを備えている。
【0165】
半波加算コムフィルタ106は、系統基本波の半サイクルの遅延時間を用いて、連系点電圧Vs (具体的には前記ディジタルの電圧Vsd)から、配電系統1の基本波成分および奇数次高調波成分を除去するものである。
【0166】
この半波加算コムフィルタ106は、連系点電圧Vs (上記電圧Vsd)を遅延する遅延回路108と、遅延前後のデータを加算する加算器110と、入力に対する出力のゲインを1に調整するための演算器112とを有している。遅延回路108における遅延時間は、配電系統1の基本波の半周期ぶん(50Hz系で10m秒)である。
【0167】
この半波加算コムフィルタ106によって、配電系統1の基本波成分および奇数次高調波成分を除去して、系統で大きな含有率の成分を除去することができる。
【0168】
半波離散フーリエ変換器114は、半波加算コムフィルタ106から与えられる電圧から、離散フーリエ変換によって前記補助次数pの電圧Vp を抽出するものであって、系統基本波の半サイクルの期間をベースとしてその半波を計測期間とするものである。
【0169】
この半波離散フーリエ変換器114も、回帰型離散フーリエ変換器であり、図9に示した回帰型離散フーリエ変換器と似た構成をしている。即ちこの半波離散フーリエ変換器114は、信号を加算する加算器116、信号を遅延させる遅延回路118、120、信号に係数を掛ける演算器122、124を備えている。図中のZは単位遅延演算子、Nは計測期間におけるサンプル数、aは前記数6で表される回転因子、jは虚数単位、kは計測期間での次数、4/Nは係数である。
【0170】
図9のものとの主な相違点は、この半波離散フーリエ変換器114は系統基本波の半サイクルの期間をベースとしてその半波を計測期間としているため、系統基本波1サイクルを図9の場合と同様に128サンプルとすると、その1/2のため、N=128/2=64、k=1となる。また、加算器116において、遅延回路118からの半波前(N/2サンプリング前)のデータを加算している。更に、半波離散フーリエ変換器では、計測期間が全波離散フーリエ変換器の半分となり出力値が半分になるので、図9の場合と同じ出力値を得るために係数を2倍の4/Nとしている。
【0171】
この第2抽出器52によれば、半波加算コムフィルタ106によって配電系統1の偶数次高調波成分のみを抽出することができるので、半波離散フーリエ変換器114によって2次である補助次数の電圧Vp を正しく分離して抽出することができる。その結果、半波加算コムフィルタ106および半波離散フーリエ変換器114における合計の計測期間を配電系統1の基本波の0.75サイクル分の期間にすることができるので、図9の場合に比べて、第2抽出器の応答速度をより速くすることができる。合計の計測期間が0.75サイクルとなるのは、系統基本波を基準にして、(a)半波加算コムフィルタ106における計測期間が0.5サイクル、(b)半波離散フーリエ変換器114における計測期間は、半波だから0.5サイクル×2次だから1/2=0.25サイクルとなり、(a)+(b)=0.75サイクルとなる。
【0172】
このように合計の計測期間を短くすることができる結果、配電系統1における過渡変動の発生・終了に対してより高速に応答することができるので、その分、継続判定器56における継続確認時間T1 を短くすることができ、これらによって、第2監視回路50において、瞬低状態と単独運転状態とをより短時間で区別することができる。ひいては、第2監視回路50によって、瞬低発生時に不要動作を起こすことなく、単独運転をより高速で検出することができる。
【0173】
(3−2)第2判定器54の他の例
第2監視回路50を構成する第2判定器54は、図10に示したものの代わりに、図22に示すものとしても良い。それによって、連系点電圧Vs の測定を固定周波数サンプリング方式で行っている場合でも、定常状態(これは瞬低や単独運転のような過渡変動がない状態のこと。以下同様)において系統周波数および/または注入周波数(注入次数)が定格からブレた場合に、第2判定器54から第2検出信号D2 が出力されるのを防止することができるので、当該ブレによって不要動作が起こることを防止することができる。
【0174】
この第2判定器54は、差分算出器92、第1〜第3の2階差分算出器131〜133、第1〜第4の比較器100、154〜156および論理積回路158を備えている。94、141〜144は遅延回路、96、145〜149は減算器である。更にこの例では、絶対値演算器98、151〜153も備えているが、これらは、先に絶対値演算器98について説明したように必要に応じて設ければ良い。
【0175】
差分算出器92、絶対値演算器98および比較器100は、図10に示したものと同じなので、重複説明を省略する。但し比較器100は第2検出信号D2 の代わりに第1判定信号S1 を出力する。
【0176】
2階差分算出器131は、差分算出器92と同様の構成の差分算出器134および135を互いに直列接続した構成をしており、第2抽出器52から与えられる前記補助次数pの電圧Vp について、現時点よりも配電系統1の基本波の整数倍サイクル前の値と現時点の値との差分を算出する(これは差分算出器135による)ことと直列に、前記基本波の整数倍サイクルよりも少し短い期間前の値と現時点の値との差分を算出する(これは差分算出器134による)ことによって、第1の2階差分Δ2Vp1を算出する。差分算出器134と135を前後逆に設けても良い。2階差分を取ることに変りはないからである。
【0177】
2階差分算出器132は、差分算出器92と同様の構成の差分算出器136および137を互いに直列接続した構成をしており、前記補助次数の電圧Vp について、現時点よりも配電系統1の基本波の整数倍サイクル前の値と現時点の値との差分を算出する(これは差分算出器137による)ことと直列に、前記基本波の整数倍サイクルよりも少し長い期間前の値と現時点の値との差分を算出する(これは差分算出器136による)ことによって、第2の2階差分Δ2Vp2を算出する。差分算出器136と137を前後逆に設けても良い。2階差分を取ることに変りはないからである。
【0178】
2階差分算出器133は、差分算出器92と同様の構成の差分算出器138および上記差分算出器134を互いに直列接続した構成をしており、前記補助次数の電圧Vp について、現時点よりも配電系統1の基本波の整数倍サイクルよりも少し短い期間前の値と現時点の値との差分を算出する(これは差分算出器134による)ことと直列に、前記基本波の整数倍サイクルよりも少し長い期間前の値と現時点の値との差分を算出する(これは差分算出器138による)ことによって、第3の2階差分Δ2Vp3を算出する。差分算出器134と138を前後逆に設けても良い。2階差分を取ることに変りはないからである。またこの例では、差分算出器134を2階差分算出器131と2階差分算出器133とに兼用しているが、そのようにせずに別に設けても良い。
【0179】
遅延回路94、140〜144を示すブロック中に記載しているZは前述した単位遅延演算子であり、−N1〜−N3は遅延時間に相当するサンプル数である。これが異なれば遅延時間が異なる。具体的には、この例では、系統基本波1サイクルのサンプル数を120点として10サイクル前を標準としているため、N1=1280としている。これは周波数のブレがない場合用である。そして、周波数が0.4%程度高い場合用にN2=1280×0.996=1275とし、周波数が0.4%程度低い場合用にN3=1280×1.004=1285としている。
【0180】
比較器154〜156は、2階差分算出器131〜133から与えられる前記2階差分Δ2Vp1〜Δ2Vp3を判定値J3 〜J5 とそれぞれ比較して(より具体的にはこの例では、絶対値演算器151〜153を通した各2階差分の絶対値とそれぞれ比較して)、各2階差分が各判定値以上のときに判定信号S2 〜S4 をそれぞれ出力する。上記各判定値J2 〜J5 は、互いに異ならせても良いし、全て同じにしても良い。この例では、前述した0.3%(0.003pu)で全て同じにしている。
【0181】
論理積回路158は、比較器100、154〜156から与えられる判定信号S1 〜S4 の論理積(AND)を取って前記第2検出信号D2 を出力する。
【0182】
詳しくは後の(4)項で数式を用いて説明するけれども、定常状態において、配電系統1の系統周波数f1 および注入周波数fm (以下においては、前記注入次数mの代わりに、それと等価の注入周波数fm を用いて説明する)にブレがない場合(即ち定格周波数の場合)は、差分算出器92の出力である上記差分ΔVp は0またはほぼ0(以下、簡略化して0と言う)になるので、上記判定信号S1 は出力されない。定常状態で系統周波数f1 および/または注入周波数fm が定格から少しブレた場合は、そのブレに対応して、2階差分算出器131〜133の出力である上記2階差分Δ2Vp1〜Δ2Vp3の内の一つが0になるので、上記判定信号S2 〜S4 の内の一つは出力されない。
【0183】
このように、定常状態では、系統周波数f1 、注入周波数fm のブレの有無に拘わらず、判定信号S1 〜S4 の内の一つは0になる。従って論理積回路158でANDを取ることによって、定常状態で系統周波数f1 および/または注入周波数fm が定格から少しブレても、上記第2検出信号D2 は出力されないので、不要動作を防止することができる。
【0184】
以上のことを、表3を参照してもう少し詳しく説明する。
【0185】
【表3】
【0186】
定常状態で系統周波数f1 および/または注入周波数fm が定格または少しブレた場合、それに該当する表3中の各枡目A〜Iの内の差分算出器92、2階差分算出器131〜133の出力は0になるが、その他の枡目内の算出器の出力は0にはならない。
【0187】
例えば、定常状態で系統周波数f1 が少し低くかつ注入周波数fm も少し低くブレた場合は、枡目A内の2階差分算出器132の出力Δ2Vp2が0になるが、その他の算出器92、131、133の出力は0にはならない。従ってこの場合は、比較器155からは判定信号S3 は出力されないので、他の判定信号S1 、S2 、S4 が出力されても、論理積回路158から第2検出信号D2 は出力されない。従って、第2判定器54が上記ブレによって不要動作することを防止することができる。
【0188】
他の場合も同様であり、定常状態で系統周波数f1 および/または注入周波数fm が少しブレても、それに該当する表3中の枡目内の算出器の出力は0であるので、論理積回路158から第2検出信号D2 は出力されない。従って、第2判定器54が上記ブレによって不要動作することを防止することができる。
【0189】
一方、系統電圧に過渡変動(瞬低や単独運転)が発生した場合は、詳しくは後の(4)項で説明するけれども、その過渡変動は各算出器92、131〜133の出力にそのまま反映されるので、即応することができる。従って、この第2判定器54と継続判定器56とを組み合わせている第2監視回路50は、単独運転を検出することができると共に、瞬低と単独運転とを区別することができる。即ち、前記表2中のB他のように単独運転を検出することができると共に、前記表2中のDとFとを区別することができる。
【0190】
なお、系統周波数f1 や注入周波数fm のブレが想定値の0.4%程度でない場合は、各枡目内の算出器の出力は0にはならないが、その出力レベルが問題とならないように、例えば、判定値J2 〜J5 と値を適宜選定するとか、想定値を0.4%以外にすること等で対処することができる。
【0191】
(3−3)単独運転検出装置30の他の実施形態
上記のような第1監視回路42、第2監視回路50および論理積回路58を設ける技術は、前述した、うなりを利用するもの以外の次数間電流注入方式の単独運転検出装置にも広く適用することができる。その場合は、図3に示す各分散電源保有設備20内の単独運転検出装置30を構成する電流注入装置32および同期制御装置34の代わりに、低圧配電線16に配電系統1の基本波の1倍よりも大きい非整数倍の注入次数mの注入電流を注入する電流注入装置を設ければ良い。
【0192】
また、単独運転監視装置36は、連系点18における前記注入次数mの電圧Vm の測定に加えて、連系点18を流れる前記注入次数mの電流Im を測定して、当該注入次数の電圧Vm および電流Im を用いて、分散電源28が単独運転になったことを検出して単独運転検出信号DSを出力するものにしても良く、その場合の第1監視回路42の例を図23に示す。第2監視回路50および論理積回路58は前述したものにすれば良い。
【0193】
図23に示す第1監視回路42を、図4に示した第1監視回路42との相違点を主体に説明する。この第1監視回路42は、第1抽出器44、第1補正器46、第3抽出器160、第2補正器162、演算器164および第3判定器166を備えている。第1抽出器44および第1補正器46は前述したとおりである。
【0194】
第3抽出器160は、連系点18を流れる電流Is から、具体的には当該電流Is を前記アナログフィルタ38、A/D変換器40と同様のアナログフィルタおよびA/D変換器を通して得られるディジタルの電流Isdから、離散フーリエ変換によって、注入次数mの高調波成分、注入次数mの上側の非整数次数の上側次数成分および注入次数mの下側の非整数次数の下側次数成分をそれぞれ抽出する。
【0195】
第2補正器162は、第3抽出器160で抽出した上側次数成分および下側次数成分の重みつき平均から、前記抽出した注入次数mの高調波成分に含まれる配電系統1の基本波成分に基づく誤差を補間演算し、かつ前記抽出した注入次数mの高調波成分から当該誤差を減算して除去して、前記注入次数mの電流Im を抽出する。
【0196】
この第3抽出器160および第2補正器162は、図5に示した第1抽出器44および第1補正器46と同様の構成をしているので、重複説明は省略する。扱うものが電圧から電流に変るだけである。
【0197】
演算器164は、上記注入次数の電圧Vm および上記注入次数の電流Im を用いて、次式に従って、連系点18から見た配電系統1の注入次数mのアドミタンスYm またはインピーダンスZm を算出する。アドミタンスとインピーダンスとは互いに逆数の関係にあるだけなので、どちらを用いても良い。
【0198】
[数7]
Ym =Im /Vm
【0199】
[数8]
Zm =Vm /Im
【0200】
第3判定器166は、演算器164から与えられるアドミタンスYm またはインピーダンスZm を所定の判定値J6 と比較して、前記分散電源28が単独運転になったことを検出して前記第1検出信号D1 を出力する。変電所4の遮断器8が開放されて単独運転が発生すると、上位系統2の大きなアドミタンスが切り離されて遮断器8よりも下流側の配電系統1のアドミタンスは小さくなり、上記アドミタンスYm も小さくなるので(インピーダンスZm の場合はこれと逆に大きくなる)、このアドミタンスYm (またはインピーダンスZm )を第3判定器166によって判定することによって、単独運転を検出することができる。
【0201】
第3判定器166は、アドミタンスYm (またはインピーダンスZm )の大きさそのものを判定するものでも良いけれども、上記第1判定器48の場合と同様に、アドミタンスYm (またはインピーダンスZm )の時間的な変化分を判定するようにしても良く、その方が、より速く判定して、単独運転検出を高速化することができる。
【0202】
(4)系統周波数f1 や注入周波数fm が定常状態で少しブレた場合の電圧偏差発生(これは系統擾乱と判定される)の防止の詳しい説明
上記(3−2)項において後で詳述すると記載していた事項を以下に説明する。
【0203】
(4−1)系統周波数f1 が少し変化した場合の系統電圧変化分検出における「基準値の現在時刻に対する時間差」の補正
系統電圧v1(t)(これは式を単純にするため基本波だけで高調波はないとする。あっても同じことである)のnサイクル前(nは正の整数)との変化分をΔv1(t)とする。
【0204】
系統周波数のブレをΔf1 とすると、Δv1(t)は次式となる。
【0205】
[数9]
Δv1(t)=sin(2・π・(f1 +Δf1 )・t+θ1 )
−sin(2・π・(f1 +Δf1 )・(t−T)+θ1 )
【0206】
時間差Tは、系統周波数(標準周波数)f1 のn倍なので次式となる。
【0207】
[数10]
T=n/f1
【0208】
その結果、Δv1(t)は次式で算出される。
【0209】
[数11]
Δv1(t)=sin(2・π・(f1 +Δf1 )・t+θ1 )
−sin(2・π・(f1 +Δf1 )・(t−n/f1 )+θ1 )
=sin(2・π・(f1 +Δf1 )・t+θ1 )
−sin(2・π・(f1 +Δf1 )・t+θ1 −{2・π・(f1 +Δf1 )・(n/f1 ))})
=sin(2・π・(f1 +Δf1 )・t+θ1 )
−sin(2・π・(f1 +Δf1 )・t+θ1 −{2・π・n・(f1 +Δf1 )/f1 )})
【0210】
Δf1 が0であれば(ブレがなければ)、数11で第1項目と第2項目のそれぞれのsinの位相差は、2πnとなるので両者は同じ値となり、Δv1(t)=0となる。
【0211】
前記図22、表3中の差分算出器92は、この数11を利用するものである。
【0212】
しかし、Δf1 が≠0の場合は、第2項の{ }の中が2πn・(f1 +Δf1 )/f1 となり、2πの整数倍とならないため、Δv1(t)≠0となる。すなわち、系統電圧v1(t)が定常状態であるのに、変化(系統擾乱)があるように算出されてしまう。そこで、時間差Tを次式に変更する。
【0213】
[数12]
T′=n/(f1 +Δf1 )
【0214】
この結果、数11と同様の計算で、次式に示すようにΔv1(t)= 0とできる。
【0215】
[数13]
Δv1(t)=sin(2・π・(f1 +Δf1 )・t+θ1 )
−sin(2・π・(f1 +Δf1 )・(t−n/(f1 +Δf1 ))+θ1 )
=sin(2・π・(f1 +Δf1 )・t+θ1 )
−sin(2・π・(f1 +Δf1 )・t+θ1 −{2・π・n})
=sin(2・π・(f1 +Δf1 )・t+θ1 )
−sin(2・π・(f1 +Δf1 )・t+θ1 )
=0
【0216】
(4−2)系統周波数f1 および/まはた注入周波数fm がそれぞれ少しブレた状態での偏差発生の防止方法
系統周波数のブレをΔf1 とし、注入次数のブレをΔfm とする。(1次数で代表する)
【0217】
時間差Tは、数12のとおり、T′=n/(f1 +Δf1 ) とする。
【0218】
なお、この(4−2)では上記(4−1)と違いfm があるので、整数nについて、以下の制約をつける。
【0219】
[数14]
n・(fm /f1 )も正の整数
【0220】
例えばf1 =50Hz(基本波)、fm =110Hz(2. 2次高調波)とすると、fm /f1 =2. 2なので、(nは全ての整数ではなく)n=5、10、15、・・・(nは5の倍数)に限定される。その結果Δv(t)は次式となる。
【0221】
[数15]
Δv(t) =V1 ・{sin(2・π・(f1 +Δf1 )・t+θ1 )
−sin(2・π・(f1 +Δf1 )・(t−n/(f1 +Δf1 ))+θ1 )}
+Vm ・{sin(2・π・(fm +Δfm )・t+θm )
−sin(2・π・(fm +Δfm )・(t−n/(f1 +Δf1 ))+θm )}
=V1 ・{sin(2・π・(f1 +Δf1 )・t+θ1 )−sin(2・π・(f1 +Δf1 )・t+θ1 −2・π・n)}
+Vm ・{sin(2・π・(fm +Δfm )・t+θm )−sin(2・π・(fm +Δfm )・t+θm −2・π・n・(fm +Δfm )/(f1 +Δf1 ))}
=第1項(V1 の項)−第2項(Vm の項)
【0222】
数15の第1項と第2項については以下となる。
【0223】
[数16]
第1項(V1 の項)=V1 ・{sin(2・π・(f1 +Δf1 )・t+θ1 )−sin(2・π・(f1 +Δf1 )・t+θ1 −2・π・n)}
=0
【0224】
[数17]
第2項(Vm の項)=Vm ・{sin(2・π・(fm +Δfm )・t+θm )−sin(2・π・(fm +Δfm )・t+θm −2・π・n・(fm +Δfm )/(f1 +Δf1 ))}
【0225】
V1 の項は、(4−1)で述べた(数13参照)と同様に0である。しかし、Vm の項については、以下(A)、(B)のように特別な場合には0となるが、一般的には0とならない。
【0226】
即ち、数15の中でn・(fm +Δfm )/(f1 +Δf1 )=dとすると、以下の場合はΔVm =0となる。
【0227】
(A)各々にブレがない場合、すなわちΔfm =Δf1 =0の場合
これは、dは整数となるためである。数14参照。
【0228】
(B)Δfm /fm =Δf1 /f1 の場合、すなわち両者のブレ方が同じ割合の場合 これは、以下の計算でdは整数となるからである。
【0229】
[数18]
d=n・(fm +Δfm )/(f1 +Δf1 )
=n・(fm /f1 )・{((fm +Δfm )/fm )/((f1 +Δf1 )/f1 )}
=n・(fm /f1 )・{(1+Δfm /fm )/(1+Δf1 /f1 )}
=n・(fm /f1 )・{1}
=n・(fm /f1 )
【0230】
しかし、両者のブレ方(の割合)に差があると、すなわちΔfm /fm ≠Δf1 /f1 の場合、Δv(t)は0とならない。
【0231】
そこで、さらに次式に示すように、Δv(t)のT″=n/(fm +Δfm )前との差分(数15で差分をとっているので、それを合わせると2階差分(即ち、差分の差分)となる)をとる。Δ2v(t)の上付き2は、2階差分を表している。
【0232】
[数19]
Δ2v(t)=Δv(t)−Δv(t−n/(fm +Δfm )
=[V1 ・{sin(2・π・(f1 +Δf1 )・t+θ1 )
−sin(2・π・(f1 +Δf1 )・(t−n/(f1 +Δf1 ))+θ1 )}
+Vm ・{sin(2・π・(fm +Δfm )・t+θm )
−sin(2・π・(fm +Δfm )・(t−n/(f1 +Δf1 ))+θm )}]
−[V1 ・{sin(2・π・(f1 +Δf1 )・((t−n/(fm +Δfm )+θ1 )
−sin(2・π・(f1 +Δf1 )・((t−n/(f1 +Δf1 )−n/(fm +Δfm )+θ1 )}
+Vm ・{sin(2・π・(fm +Δfm )・(t−n/(fm +Δfm )+θm )
−sin(2・π・(fm +Δfm )・((t−n/(f1 +Δf1 )−n/(fm +Δfm )+θm )}]
=[V1 {第1項−第2項}+Vm {第3項−第4項}]
−[V1 {第5項−第6項}+Vm {第7項−第8項}]
【0233】
数19において、V1 、Vm に関する計算は以下である。
【0234】
(A)V1 に関する計算[{第1項−第2項}]−[{第5項−第6項}]
これは数15の第1項に示すとおり、{第1項−第2項}=0、{第5項−第6項}=0なので、それらの差も、[{第1項−第2項}]−[{第5項−第6項}]=0である。
【0235】
(B)Vm に関する項の計算([{第3項−第4項}]−[{第7項−第8項}])
これは次式で示す通り、こちらも0となる。
【0236】
[数20]
Δ2v(t)のVm に関する項の計算=[{第3項−第4項}]−[{第7項−第8項}]
=[sin(2・π・(fm +Δfm )・t+θm )−sin(2・π・(fm +Δfm )・(t−n/(f1 +Δf1 ))+θm )] ←第1括弧
−[sin(2・π・(fm +Δfm )・(t−n/(f1 +Δfm ))+θm )−sin(2・π・(fm +Δfm )・(t−n/(f1 +Δf1 )−n/(fm +Δfm ))+θm )] ←第2括弧
=[第1括弧1項−第1括弧2項]−[第2括弧1項−第2括弧2項]
=[第1括弧1項−第2括弧1項]−[第1括弧2項−第2括弧2項]
=[sin(2・π・(fm +Δfm )・t+θm )
−sin(2・π・(fm +Δfm )・(t−n/(f1 +Δfm ))+θm )]
−[sin(2・π・(fm +Δfm )・(t−n/(f1 +Δf1 ))+θm )
−sin(2・π・(fm +Δfm )・(t−n/(f1 +Δf1 )−n/(fm +Δfm ))+θm )]
=[sin(2・π・(fm +Δfm )・t+θm )−sin(2・π・(fm +Δfm )・t−2・π・n+θm )]
−[sin(2・π・(fm +Δfm )・t−2・π・n・(fm +Δfm )/(f1 +Δf1 )+θm )
−sin(2・π・(fm +Δfm )・t−2・π・n・(fm +Δfm )/(f1 +Δf1 )−2・π・n+θm )]
=[sin(2・π・(fm +Δfm )・t+θm )−sin(2・π・(fm +Δfm )・t+θm )]
−[sin(2・π・(fm +Δfm )・t−2・π・n・(fm +Δfm )/(f1 +Δf1 ))+θm )
−sin(2・π・(fm +Δfm )・t−2・π・n・(fm +Δfm )/(f1 +Δf1 )+θm )]
=[0]−[0]=0
【0237】
上記数19は、以下の性質を持つ。
【0238】
(A)系統周波数f1 や注入周波数fm が定常状態で少しブレた場合、その割合がそれぞれ違っても、偏差発生(即ち2階差分値が0でなくなること)は防止できる。
【0239】
(B)系統電圧に過渡変動(瞬低や単独運転)が発生した場合には、数19において現在値の変化がそのまま式の値に反映されるので即応できる。(数19の第1項と第3項の部分が現在値の変化に対応)
【0240】
前記図22、表3中の2階差分算出器131〜133は、数19を利用するものである。
【符号の説明】
【0241】
1 配電系統
18 連系点
20 分散電源保有設備
28 分散電源
30 単独運転検出装置
32 電流注入装置
34 同期制御装置
36 単独運転監視装置
42 第1監視回路
44 第1抽出器
46 第1補正器
48 第1判定器
50 第2監視回路
52 第2抽出器
54 第2判定器
56 継続判定器
58 論理積回路
Vs 連系点の電圧
Iinj 注入電流
Vm 、V11、V12、V21、V22、V20 注入次数の電圧
Vp 補助次数の電圧
D1 第1検出信号
D2 第2検出信号
D3 第3検出信号
D4 第4検出信号
DS 単独運転検出信号
【特許請求の範囲】
【請求項1】
分散電源を有する分散電源保有設備が配電系統に接続された構成のシステムに適用されるものであって、
前記分散電源保有設備側から前記配電系統に、当該配電系統の基本波の1倍よりも大きい非整数倍の注入次数の注入電流を注入する電流注入装置と、
前記分散電源保有設備と前記配電系統との連系点における前記注入次数の電圧を測定して当該注入次数の電圧を用いて、前記分散電源が単独運転になったことを検出して単独運転検出信号を出力する単独運転監視装置とを備えている単独運転検出装置において、
前記単独運転監視装置は、
(1)(a)前記連系点における電圧から、離散フーリエ変換によって、前記注入次数の高調波成分、前記注入次数の上側の非整数次数の上側次数成分および前記注入次数の下側の非整数次数の下側次数成分をそれぞれ抽出する第1抽出器と、
(b)前記第1抽出器で抽出した前記上側次数成分および下側次数成分の重みつき平均から、前記抽出した注入次数の高調波成分に含まれる前記配電系統の基本波成分に基づく誤差を補間演算し、かつ前記抽出した注入次数の高調波成分から当該誤差を減算して除去して、前記注入次数の電圧を抽出する第1補正器と、
(c)前記第1補正器から与えられる前記注入次数の電圧を所定の判定値と比較して、前記分散電源が単独運転になったことを検出して第1検出信号を出力する第1判定器とを有している第1監視回路と、
(2)(a)前記連系点における電圧から、離散フーリエ変換によって、前記注入次数±1次の範囲内にありかつ奇数次を除く次数である補助次数の電圧を、前記第1抽出器における計測期間よりも短い計測期間で抽出する第2抽出器と、
(b)前記第2抽出器から与えられる前記補助次数の電圧を所定の判定値と比較して、前記分散電源が単独運転になったことを検出して第2検出信号を出力する第2判定器と、
(c)前記第2判定器から与えられる前記第2検出信号が所定の継続確認時間継続したときに第3検出信号を出力する継続判定器とを有している第2監視回路と、
(3)前記第1監視回路から与えられる前記第1検出信号と前記第2監視回路から与えられる前記第3検出信号の論理積を取って前記単独運転検出信号を出力する論理積回路とを備えている、ことを特徴とする分散電源の単独運転検出装置。
【請求項2】
前記注入次数は2次より大かつ3次より小であり、前記補助次数は2次であり、
前記第2抽出器は、計測期間が前記配電系統の基本波の1サイクル分の期間である離散フーリエ変換器で構成されている請求項1記載の分散電源の単独運転検出装置。
【請求項3】
前記注入次数は2次より大かつ3次より小であり、前記補助次数は2次であり、
前記第2抽出器は、
(a)前記配電系統の基本波の半サイクルの遅延時間を用いて、前記連系点における電圧から、前記配電系統の基本波成分および奇数次高調波成分を除去する半波加算コムフィルタと、
(b)前記半波加算コムフィルタから与えられる電圧から、離散フーリエ変換によって前記補助次数の電圧を抽出するものであって、前記配電系統の基本波の半サイクルの期間をベースとしてその半波を計測期間とする半波離散フーリエ変換器とを有している請求項1記載の分散電源の単独運転検出装置。
【請求項4】
前記注入次数は2次より大かつ3次より小であり、前記補助次数は2.5次であり、
前記第2抽出器は、計測期間が前記配電系統の基本波の2サイクル分の期間である離散フーリエ変換器で構成されている請求項1記載の分散電源の単独運転検出装置。
【請求項5】
前記第2判定器は、
(a)前記第2抽出器から与えられる前記補助次数の電圧について、現時点よりも前記配電系統の基本波の整数倍サイクル前の値と現時点の値との差分を算出する差分算出器と、
(b)前記差分算出器から与えられる前記差分を所定の判定値と比較して、前者が後者以上のときに前記第2検出信号を出力する比較器とを有している請求項1から4のいずれか一項に記載の分散電源の単独運転検出装置。
【請求項6】
前記第2判定器は、
(a)前記第2抽出器から与えられる前記補助次数の電圧について、現時点よりも前記配電系統の基本波の整数倍サイクル前の値と現時点の値との差分を算出する差分算出器と、
(b)前記第2抽出器から与えられる前記補助次数の電圧について、現時点よりも前記配電系統の基本波の整数倍サイクル前の値と現時点の値との差分を算出することと直列に、前記基本波の整数倍サイクルよりも短い期間前の値と現時点の値との差分を算出することによって、第1の2階差分を算出する第1の2階差分算出器と、
(c)前記第2抽出器から与えられる前記補助次数の電圧について、現時点よりも前記配電系統の基本波の整数倍サイクル前の値と現時点の値との差分を算出することと直列に、前記基本波の整数倍サイクルよりも長い期間前の値と現時点の値との差分を算出することによって、第2の2階差分を算出する第2の2階差分算出器と、
(d)前記第2抽出器から与えられる前記補助次数の電圧について、現時点よりも前記配電系統の基本波の整数倍サイクルよりも短い期間前の値と現時点の値との差分を算出することと直列に、前記基本波の整数倍サイクルよりも長い期間前の値と現時点の値との差分を算出することによって、第3の2階差分を算出する第3の2階差分算出器と、
(e)前記差分算出器から与えられる前記差分を所定の判定値と比較して、前者が後者以上のときに第1判定信号を出力する第1の比較器と、
(f)前記第1の2階差分算出器から与えられる前記第1の2階差分を所定の判定値と比較して、前者が後者以上のときに第2判定信号を出力する第2の比較器と、
(g)前記第2の2階差分算出器から与えられる前記第2の2階差分を所定の判定値と比較して、前者が後者以上のときに第3判定信号を出力する第3の比較器と、
(h)前記第3の2階差分算出器から与えられる前記第3の2階差分を所定の判定値と比較して、前者が後者以上のときに第4判定信号を出力する第4の比較器と、
(i)前記第1〜第4の比較器から与えられる前記第1〜第4の判定信号の論理積を取って前記第2検出信号を出力する第2の論理積回路とを有している請求項1から4のいずれか一項に記載の分散電源の単独運転検出装置。
【請求項7】
前記単独運転監視装置は、前記連系点における前記注入次数の電圧の測定に加えて、前記連系点を流れる前記注入次数の電流を測定して、当該注入次数の電圧および電流を用いて、前記分散電源が単独運転になったことを検出して単独運転検出信号を出力するものであり、
前記第1監視回路は、
(a)前記第1抽出器および前記第1補正器と、
(b)前記連系点を流れる電流から、離散フーリエ変換によって、前記注入次数の高調波成分、前記注入次数の上側の非整数次数の上側次数成分および前記注入次数の下側の非整数次数の下側次数成分をそれぞれ抽出する第3抽出器と、
(c)前記第3抽出器で抽出した前記上側次数成分および下側次数成分の重みつき平均から、前記抽出した注入次数の高調波成分に含まれる前記配電系統の基本波成分に基づく誤差を補間演算し、かつ前記抽出した注入次数の高調波成分から当該誤差を減算して除去して、前記注入次数の電流を抽出する第2補正器と、
(d)前記第1補正器から与えられる前記注入次数の電圧および前記第2補正器から与えられる前記注入次数の電流を用いて、前記連系点から見た前記配電系統の前記注入次数のアドミタンスまたはインピーダンスを算出する演算器と、
(e)前記第1判定器に代わるものであって、前記演算器から与えられる前記アドミタンスまたはインピーダンスを所定の判定値と比較して、前記分散電源が単独運転になったことを検出して前記第1検出信号を出力する第3判定器とを有している請求項1から6のいずれか一項に記載の分散電源の単独運転検出装置。
【請求項1】
分散電源を有する分散電源保有設備が配電系統に接続された構成のシステムに適用されるものであって、
前記分散電源保有設備側から前記配電系統に、当該配電系統の基本波の1倍よりも大きい非整数倍の注入次数の注入電流を注入する電流注入装置と、
前記分散電源保有設備と前記配電系統との連系点における前記注入次数の電圧を測定して当該注入次数の電圧を用いて、前記分散電源が単独運転になったことを検出して単独運転検出信号を出力する単独運転監視装置とを備えている単独運転検出装置において、
前記単独運転監視装置は、
(1)(a)前記連系点における電圧から、離散フーリエ変換によって、前記注入次数の高調波成分、前記注入次数の上側の非整数次数の上側次数成分および前記注入次数の下側の非整数次数の下側次数成分をそれぞれ抽出する第1抽出器と、
(b)前記第1抽出器で抽出した前記上側次数成分および下側次数成分の重みつき平均から、前記抽出した注入次数の高調波成分に含まれる前記配電系統の基本波成分に基づく誤差を補間演算し、かつ前記抽出した注入次数の高調波成分から当該誤差を減算して除去して、前記注入次数の電圧を抽出する第1補正器と、
(c)前記第1補正器から与えられる前記注入次数の電圧を所定の判定値と比較して、前記分散電源が単独運転になったことを検出して第1検出信号を出力する第1判定器とを有している第1監視回路と、
(2)(a)前記連系点における電圧から、離散フーリエ変換によって、前記注入次数±1次の範囲内にありかつ奇数次を除く次数である補助次数の電圧を、前記第1抽出器における計測期間よりも短い計測期間で抽出する第2抽出器と、
(b)前記第2抽出器から与えられる前記補助次数の電圧を所定の判定値と比較して、前記分散電源が単独運転になったことを検出して第2検出信号を出力する第2判定器と、
(c)前記第2判定器から与えられる前記第2検出信号が所定の継続確認時間継続したときに第3検出信号を出力する継続判定器とを有している第2監視回路と、
(3)前記第1監視回路から与えられる前記第1検出信号と前記第2監視回路から与えられる前記第3検出信号の論理積を取って前記単独運転検出信号を出力する論理積回路とを備えている、ことを特徴とする分散電源の単独運転検出装置。
【請求項2】
前記注入次数は2次より大かつ3次より小であり、前記補助次数は2次であり、
前記第2抽出器は、計測期間が前記配電系統の基本波の1サイクル分の期間である離散フーリエ変換器で構成されている請求項1記載の分散電源の単独運転検出装置。
【請求項3】
前記注入次数は2次より大かつ3次より小であり、前記補助次数は2次であり、
前記第2抽出器は、
(a)前記配電系統の基本波の半サイクルの遅延時間を用いて、前記連系点における電圧から、前記配電系統の基本波成分および奇数次高調波成分を除去する半波加算コムフィルタと、
(b)前記半波加算コムフィルタから与えられる電圧から、離散フーリエ変換によって前記補助次数の電圧を抽出するものであって、前記配電系統の基本波の半サイクルの期間をベースとしてその半波を計測期間とする半波離散フーリエ変換器とを有している請求項1記載の分散電源の単独運転検出装置。
【請求項4】
前記注入次数は2次より大かつ3次より小であり、前記補助次数は2.5次であり、
前記第2抽出器は、計測期間が前記配電系統の基本波の2サイクル分の期間である離散フーリエ変換器で構成されている請求項1記載の分散電源の単独運転検出装置。
【請求項5】
前記第2判定器は、
(a)前記第2抽出器から与えられる前記補助次数の電圧について、現時点よりも前記配電系統の基本波の整数倍サイクル前の値と現時点の値との差分を算出する差分算出器と、
(b)前記差分算出器から与えられる前記差分を所定の判定値と比較して、前者が後者以上のときに前記第2検出信号を出力する比較器とを有している請求項1から4のいずれか一項に記載の分散電源の単独運転検出装置。
【請求項6】
前記第2判定器は、
(a)前記第2抽出器から与えられる前記補助次数の電圧について、現時点よりも前記配電系統の基本波の整数倍サイクル前の値と現時点の値との差分を算出する差分算出器と、
(b)前記第2抽出器から与えられる前記補助次数の電圧について、現時点よりも前記配電系統の基本波の整数倍サイクル前の値と現時点の値との差分を算出することと直列に、前記基本波の整数倍サイクルよりも短い期間前の値と現時点の値との差分を算出することによって、第1の2階差分を算出する第1の2階差分算出器と、
(c)前記第2抽出器から与えられる前記補助次数の電圧について、現時点よりも前記配電系統の基本波の整数倍サイクル前の値と現時点の値との差分を算出することと直列に、前記基本波の整数倍サイクルよりも長い期間前の値と現時点の値との差分を算出することによって、第2の2階差分を算出する第2の2階差分算出器と、
(d)前記第2抽出器から与えられる前記補助次数の電圧について、現時点よりも前記配電系統の基本波の整数倍サイクルよりも短い期間前の値と現時点の値との差分を算出することと直列に、前記基本波の整数倍サイクルよりも長い期間前の値と現時点の値との差分を算出することによって、第3の2階差分を算出する第3の2階差分算出器と、
(e)前記差分算出器から与えられる前記差分を所定の判定値と比較して、前者が後者以上のときに第1判定信号を出力する第1の比較器と、
(f)前記第1の2階差分算出器から与えられる前記第1の2階差分を所定の判定値と比較して、前者が後者以上のときに第2判定信号を出力する第2の比較器と、
(g)前記第2の2階差分算出器から与えられる前記第2の2階差分を所定の判定値と比較して、前者が後者以上のときに第3判定信号を出力する第3の比較器と、
(h)前記第3の2階差分算出器から与えられる前記第3の2階差分を所定の判定値と比較して、前者が後者以上のときに第4判定信号を出力する第4の比較器と、
(i)前記第1〜第4の比較器から与えられる前記第1〜第4の判定信号の論理積を取って前記第2検出信号を出力する第2の論理積回路とを有している請求項1から4のいずれか一項に記載の分散電源の単独運転検出装置。
【請求項7】
前記単独運転監視装置は、前記連系点における前記注入次数の電圧の測定に加えて、前記連系点を流れる前記注入次数の電流を測定して、当該注入次数の電圧および電流を用いて、前記分散電源が単独運転になったことを検出して単独運転検出信号を出力するものであり、
前記第1監視回路は、
(a)前記第1抽出器および前記第1補正器と、
(b)前記連系点を流れる電流から、離散フーリエ変換によって、前記注入次数の高調波成分、前記注入次数の上側の非整数次数の上側次数成分および前記注入次数の下側の非整数次数の下側次数成分をそれぞれ抽出する第3抽出器と、
(c)前記第3抽出器で抽出した前記上側次数成分および下側次数成分の重みつき平均から、前記抽出した注入次数の高調波成分に含まれる前記配電系統の基本波成分に基づく誤差を補間演算し、かつ前記抽出した注入次数の高調波成分から当該誤差を減算して除去して、前記注入次数の電流を抽出する第2補正器と、
(d)前記第1補正器から与えられる前記注入次数の電圧および前記第2補正器から与えられる前記注入次数の電流を用いて、前記連系点から見た前記配電系統の前記注入次数のアドミタンスまたはインピーダンスを算出する演算器と、
(e)前記第1判定器に代わるものであって、前記演算器から与えられる前記アドミタンスまたはインピーダンスを所定の判定値と比較して、前記分散電源が単独運転になったことを検出して前記第1検出信号を出力する第3判定器とを有している請求項1から6のいずれか一項に記載の分散電源の単独運転検出装置。
【図1】

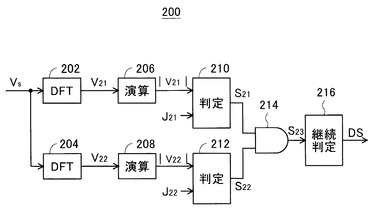
【図2】
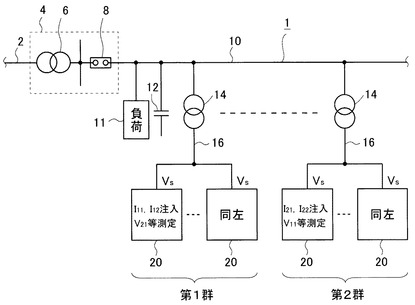
【図3】
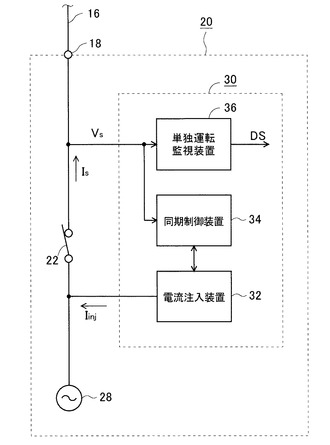
【図4】
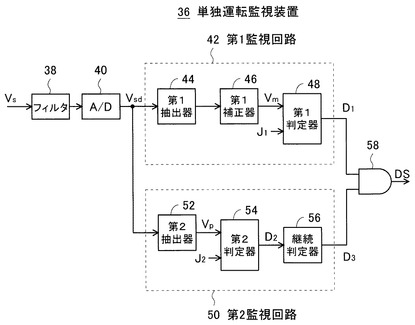
【図5】
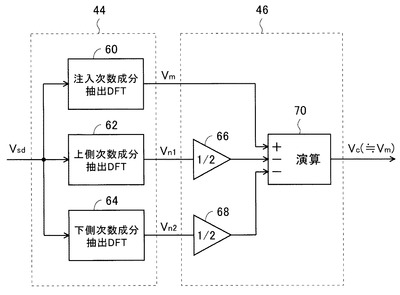
【図6】
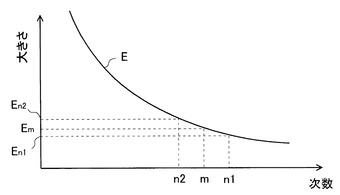
【図7】
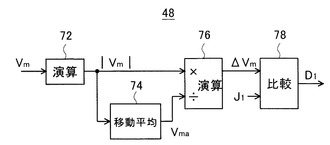
【図8】
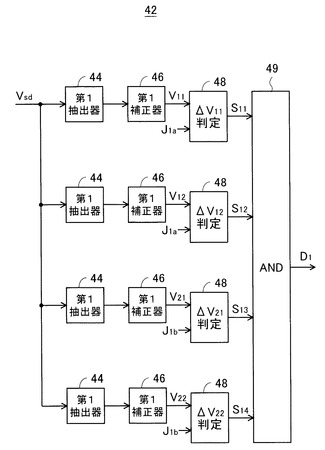
【図9】
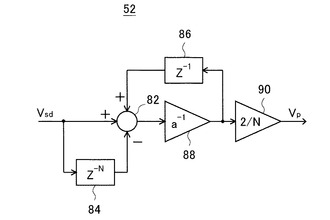
【図10】
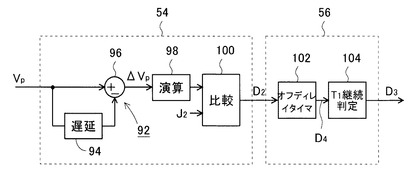
【図11】
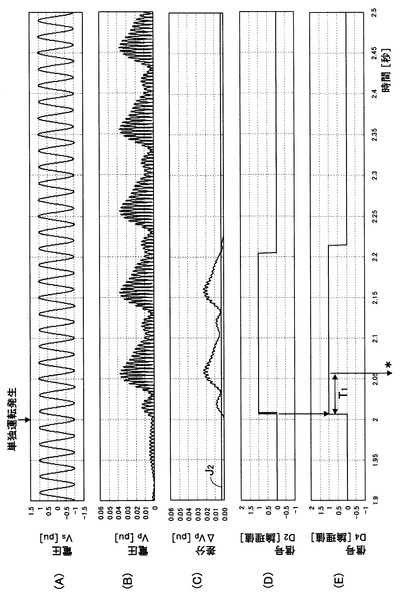
【図12】
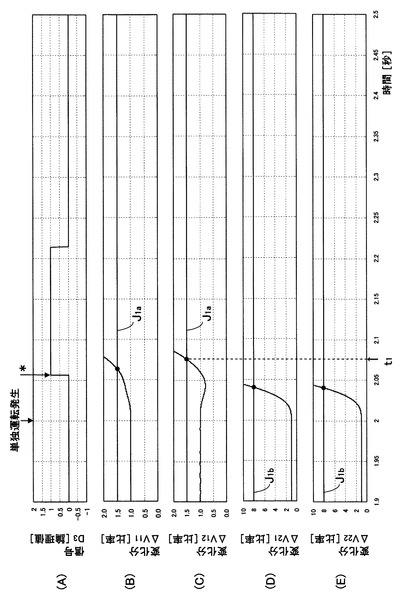
【図13】
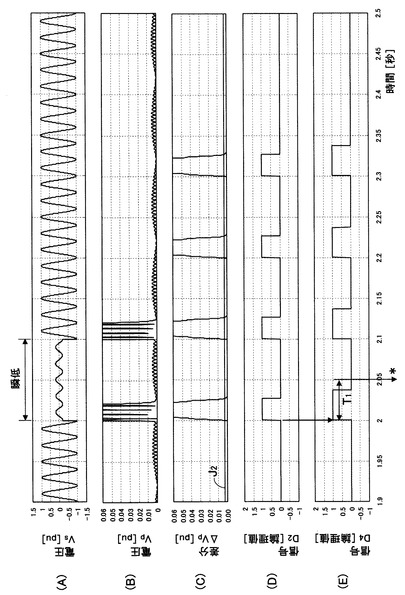
【図14】
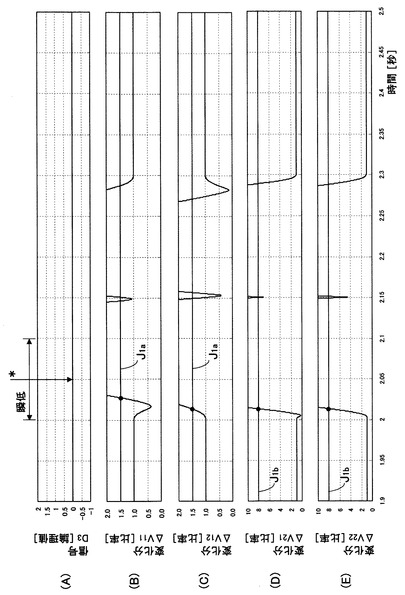
【図15】
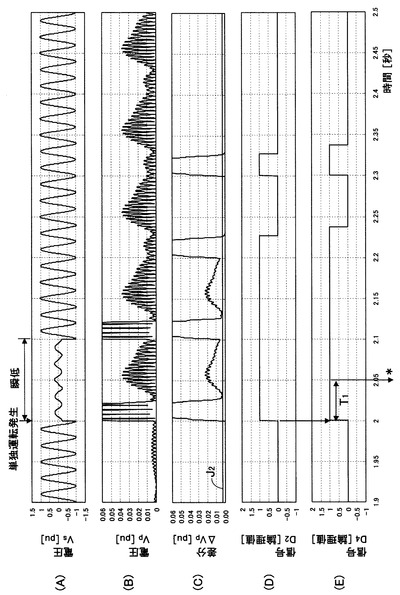
【図16】
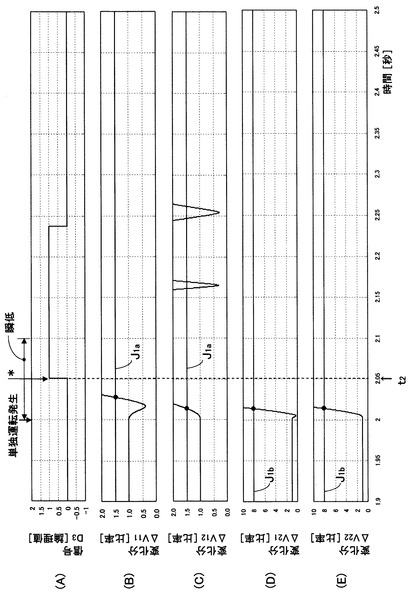
【図17】
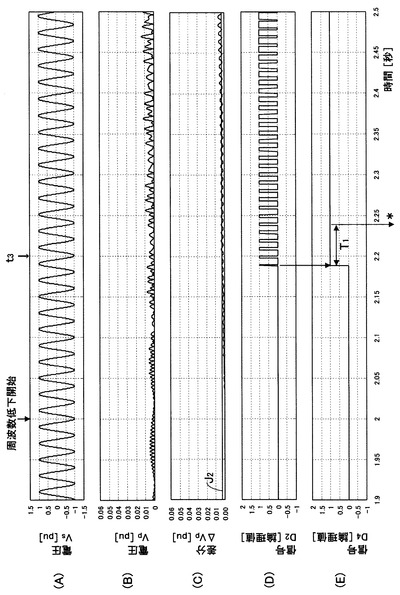
【図18】
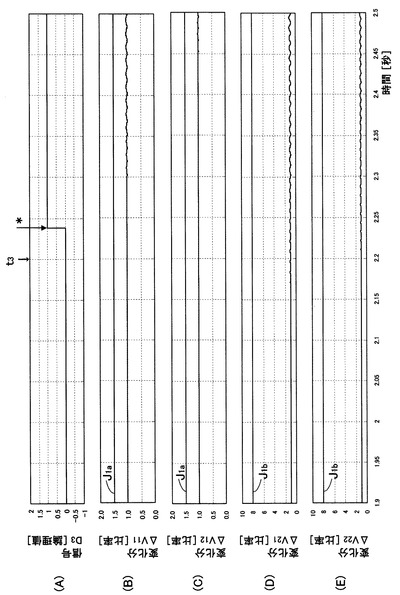
【図19】
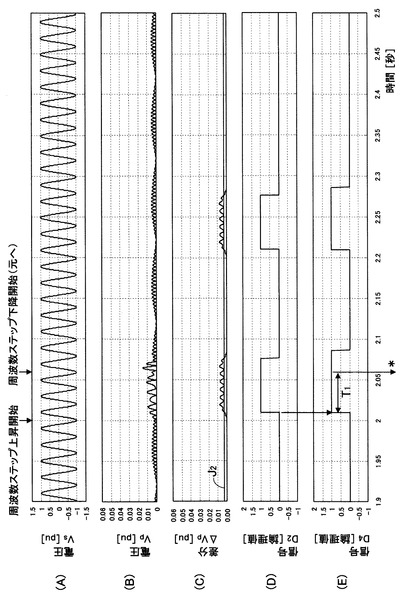
【図20】
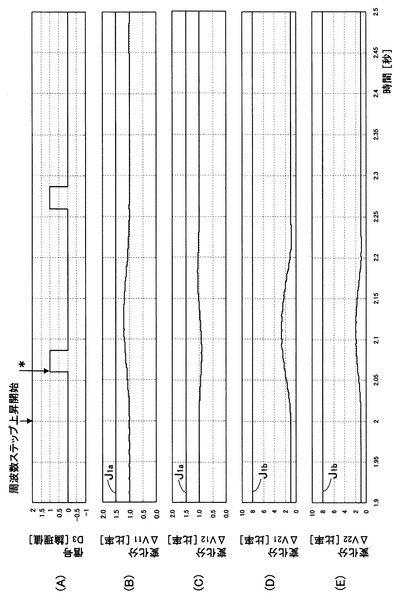
【図21】
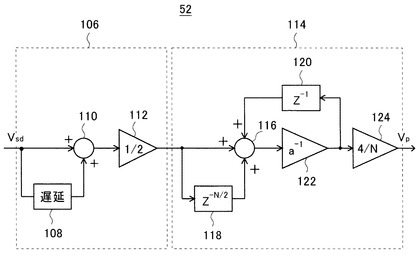
【図22】
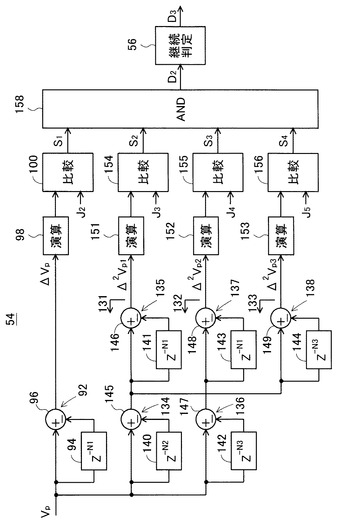
【図23】
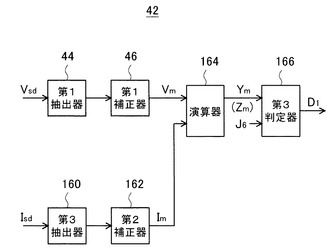
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【公開番号】特開2013−106405(P2013−106405A)
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願番号】特願2011−247669(P2011−247669)
【出願日】平成23年11月11日(2011.11.11)
【出願人】(000156938)関西電力株式会社 (1,442)
【出願人】(000003942)日新電機株式会社 (328)
【Fターム(参考)】
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願日】平成23年11月11日(2011.11.11)
【出願人】(000156938)関西電力株式会社 (1,442)
【出願人】(000003942)日新電機株式会社 (328)
【Fターム(参考)】
[ Back to top ]