
可変速給水装置
【課題】 吸込側に圧力センサや水位センサを設置することなく、低コストで水位の変化に対応して推定末端圧力制御の演算式を補正することができる給水装置を提供する。
【解決手段】 この可変速給水装置は、可変速モータ12を使用したポンプ11を用い、ポンプ吐出側の圧力を推定末端圧力一定制御する可変速給水装置である。推定末端圧力一定制御における締切目標圧力PBを得るための締切目標回転数HzBとして、ポンプ始動時の特定の圧力状態における回転速度値を取り込んで用いる。なお、特定の圧力状態とは、回転速度値を取り込むためのトリガーとして制御上予め定められたポンプ始動時の圧力の条件を言い、ポンプ始動時における小水量状態であって、ポンプが締切目標圧力の近傍で運転していると推定される状態であることが望ましい。
【解決手段】 この可変速給水装置は、可変速モータ12を使用したポンプ11を用い、ポンプ吐出側の圧力を推定末端圧力一定制御する可変速給水装置である。推定末端圧力一定制御における締切目標圧力PBを得るための締切目標回転数HzBとして、ポンプ始動時の特定の圧力状態における回転速度値を取り込んで用いる。なお、特定の圧力状態とは、回転速度値を取り込むためのトリガーとして制御上予め定められたポンプ始動時の圧力の条件を言い、ポンプ始動時における小水量状態であって、ポンプが締切目標圧力の近傍で運転していると推定される状態であることが望ましい。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、例えば、井戸から水を汲み上げるために用いられる、インバータなどの周波数変換器によって可変速運転されるモータポンプを備えた可変速給水装置に関する。
【背景技術】
【0002】
例えば、ポンプの駆動源として、周波数変換器(インバータ)によって回転を制御することができるモータを用い、ポンプを可変速運転することが広く行われている。インバータを用いることによって、電源を問わず運転が可能であり、また、可変速運転することによって、ポンプ吐出側を圧力一定制御するような制御が可能になる。
【0003】
図7は、可変速運転を行うポンプを用いた従来の給水システムを示すもので、給水ポンプ1と、該ポンプ1を駆動するインバータ2とモータ3を有する可変速電動機4と、インバータ2の出力する電力の周波数を制御する制御装置5を有している。制御装置5は、所定のロジックに沿って制御目標の圧力を算出する目標圧力演算手段6と、給水ポンプ1の吐出管7に設けられ該吐出管7の吐出水圧Poを検出して該吐出水圧Poの信号を出力する圧力検出手段8と、可変速電動機4の回転数を検出して、該回転数Hzxの信号を出力する回転数検出部9と、圧力検出手段8が検出した吐出水圧Poを算出された制御目標圧力と一致させるようにインバータ2の出力を制御する回転数制御手段10を有している。この例では、回転数検出部は、回転制御部の出力を直接に検出する。
【0004】
ポンプ運転中は、配管内圧力を圧力検出手段8で検出し、運転状態に応じた目標圧力を演算しながら、モータ3をインバータ2により可変速運転し、目標圧力より高い場合は回転数を下げ、目標圧力より低い場合は回転数を上げて、ポンプ吐出側を目標圧力値一定となるように制御する。さらに、運転状況に応じて温水シャワー等の末端機器における圧力が一定になるように目標圧力を変化させると、推定末端圧力一定制御となる。このようにポンプを可変速制御すると、ポンプ吐出側の圧力変動を低く抑えられるばかりでなく、従来オンオフ制御をしていた時に比べて圧力タンクが小さくてすむので、地上ユニットを小型にできる。
【0005】
上記構成の可変速給水装置において、目標圧力演算手段6は回転数Hzxに対応する目標圧力PVを、回転数Hzxの関数{PV=f(Hzx)}により算出し、該目標圧力を表す目標圧力PVの信号を出力する。また、回転数制御手段10は目標圧力PVと吐出水圧Poとに応答して、該吐出水圧Poが目標圧力PVに一致するように、可変速電動機4を速度制御する。
【0006】
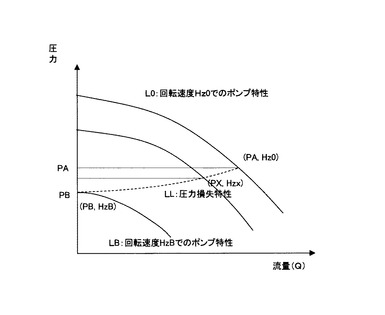
図8は、このような従来の可変速給水装置におけるポンプ流量と圧力の関係を説明する図である。この図において用いられている符号は、以下のとおりである。
PA:最大水量目標圧力(=最高位位置までの揚程+最高位位置の必要圧力+最大水量時の配管抵抗)
PB:締切目標圧力(=最高位位置までの揚程+最高位位置の必要圧力)
Hzx:回転数検出部において検出されるポンプ回転速度値
Hz0:ポンプの最高回転数(通常50Hz又は60Hz)
HzB:締切目標圧力PBを締切(流量0)で出すためのポンプの回転数
PA,PBは、給水系の仕様としてシステムの立ち上げ時に入力手段より設定する。HzBは、締切目標圧力PBとポンプによって決まる値で、ポンプ特性上、一般に、HzB=(PB/P0)1/2×Hz0で表される。図中、線L0,LBは、それぞれ回転数Hz0、HzBにおけるポンプの性能曲線であり、線LLは、ポンプから端末機器までの配管における圧力損失を表す曲線である。
【0007】
このように設定された状態で、目標圧力演算手段6においては、ポンプ回転数Hzxの入力により、
a)Hzx<HzBのとき
PV=PB (1)
b)HzB≦Hzx≦Hz0では
PV=((Hzx-HzB)/(Hz0-HzB))1/2×(PA-PB)+PB (2)
c)Hz0<Hzxのとき
PV=PA (3)
にて、逐次目標圧力PVを演算するようにプログラムされている。これによれば、ポンプ回転数が低い場合には目標圧力を締切目標圧力PBに導くように、ポンプ回転数が高い場合には目標圧力を最大水量目標圧力PAに導くように、その中間の回転数では、最大運転点と最小運転点を結ぶ直線上の点の圧力に導くように、ポンプが制御される。この曲線は、圧力損失特性曲線LLを近似するものである。このような方法により、流量計を用いることなく、流量に係わらず末端圧力を一定に制御し、円滑な機器動作と、エネルギーの節約という効果を得ることができる。
【0008】
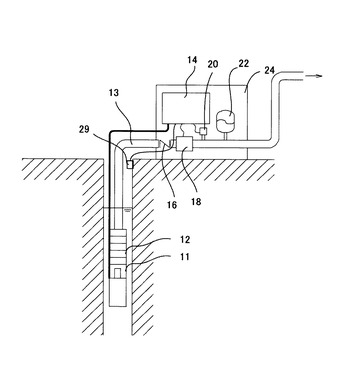
ところで、このようなポンプが井戸等の水源に設置される場合がある。図9は、深井戸から揚水して需要者に供給する給水装置であり、井戸内に設置した水中ポンプ11と、この水中ポンプ11から導出された吐出し配管13と、水中ポンプ11に給電しかつこれを制御するための機器および制御装置を収容する制御盤14とを有している。吐出し配管13には、逆止弁16、フロースイッチ18、圧力センサ20、および圧力タンク22が設けられ、これらと制御盤14は地上ユニット24内に収容されている。この給水装置においても、図7に示す構成の制御装置5により、図8に示すような推定末端圧力一定制御が行われる。
【0009】
このような井戸のような水源では、季節の変化や使用状況等によって水位が変動する場合が有る。上記のような推定末端圧力一定制御は、吸込側の圧力が一定であるという前提で行われているので、水位変動等により吸込側の圧力が変化すると、正確な末端圧力一定制御ができなくなり、圧力変動が大きくなってしまう。このような圧力上昇は余分な動力の使用であり、一方、圧力低下は需要家の不便に直結するため、PAやPBを余裕を持って高めに設定することになり、やはり、余分な動力の使用につながる。
【0010】
【特許文献1】特許1892600号公報
【特許文献2】特許第3291007号公報
【発明の開示】
【発明が解決しようとする課題】
【0011】
従って、井戸のような水源において、推定末端圧力一定制御を効率よく実施するには、吸込側の圧力変化に基づいて推定末端圧力制御の演算式を補正する必要が有る。吸込側の圧力変化を知る方法として、井戸に水位計を設置して、水位から吸込側の圧力を算出する方法や、吸込側に圧力センサを設けて吸込側の圧力を測定する方法が考えられる。
【0012】
例えば、図9に示すように、井戸に水位センサ29を設置して水位から吸込側の圧力を算出する方法が考えられる。この水位センサ29は、井戸地上面から井戸水面に超音波を当て反射により水位を測定するものである。この水位センサ29により水位の変動値を検出し、この値を吸込圧力変動値として目標圧力演算手段の演算式を逐次補正する。補正方法については、特許文献2等に提案されている。このように、水位センサにより水位の変動値PPを検出すれば、井戸水位が変動してもポンプ吐出側を推定末端圧力制御することができる。この水位センサ29による補正制御を用いれば、精度の良い推定末端圧力制御が可能となる。
【0013】
しかしながら、水位センサ29や圧力センサの設置には、コストが掛かる。また、設置場所が井戸内というメンテナンスのしにくい環境であることを考慮すると、これらを安定に動作させるためには、かなりのメンテナンスコストも必要になる。また吸込側に圧力センサを設ける方法については、圧力センサを取り付ける吸込配管が必要だが、水中ポンプの場合、構造的に吸込配管を持たないため、吸込側圧力センサを取り付けることができない。
【0014】
一方、ポンプ低負荷状態で特定のポンプ回転数における実際に検出される吐出圧力を締切状態でのそのポンプ回転数における吐出圧力の近似値として用いて、試運転時に押込み側圧力値を補正する方法が考えられる。しかしながら、低負荷を検出するために極小水量を検出するフロースイッチのような流量検出器を用いた場合、フロースイッチでは極小水量と締め切り状態の区別がつかないので、実用的ではない。もちろん、流量計を用いればよいが、流量計は高価であって吸込側に圧力センサ等を用いない利点が相殺されてしまう。また、いずれを用いる場合でも、需要水量が急激に0になったときなどは、ポンプの運転速度の減速が間に合わずに、吐出側の検出圧力が、その時の水量に対する本来あるべき圧力よりもかなり高くなってしまうため、吸込側圧力の補正値が大きくずれてしまうことがある。
【0015】
本発明は、前記事情に鑑みて為されたもので、吸込側に圧力センサや水位センサを設置することなく、低コストで水位の変化に対応して推定末端圧力制御の演算式を補正することができる給水装置を提供することを目的とする。
【課題を解決するための手段】
【0016】
前記目的を達成するために、請求項1に記載の可変速給水装置は、可変速モータを使用したポンプを用い、ポンプ吐出側の圧力を推定末端圧力一定制御する可変速給水装置において、前記推定末端圧力一定制御における締切目標圧力を得るための締切目標回転数として、前記推定末端圧力一定制御における締切目標圧力を得るための締切目標回転数として、ポンプ始動時の特定の圧力状態における回転速度値を取り込んで用いることを特徴とする。
【0017】
ここで、ポンプ始動時の特定の圧力状態とは、回転速度値を取り込むためのトリガーとして制御上予め定められたポンプ始動時の圧力の条件を言い、ポンプ始動時における小水量状態であって、ポンプが締切目標圧力の近傍で運転していると推定される状態であることが望ましい。このような構成により、吸込側の圧力を直接または間接に検出する手段を設けることなく、推定末端圧力一定制御の基準となる締切目標回転数を取得することができる。
【0018】
請求項2に記載の可変速給水装置は、請求項1に記載の発明において、前記締切目標回転数として、ポンプ吐出側の圧力が下降傾向から上昇傾向に転じた後のポンプの回転速度値を用いることを特徴とする。ポンプ始動時において、ポンプ吐出側の圧力が下降傾向から上昇傾向に転じた後は、ポンプはその特性曲線に沿って安定的に運転していると考えられる。従って、ポンプが締切目標圧力の近傍で運転していると推定され、かつ小水量状態であれば、その吐出し側圧力から締切目標回転数を取得することができる。
【0019】
請求項3に記載の可変速給水装置は、請求項1または請求項2に記載の発明において、前記締切目標回転数として、ポンプ吐出側の圧力が締切目標圧力またはこれに近い値になった時のポンプの回転速度値を用いることを特徴とする。
請求項4に記載の可変速給水装置は、請求項1ないし請求項3のいずれかに記載の発明において、前記取り込まれた締切目標回転数に基づいてポンプ吸込み側の基準圧力値の変化を算出し、これを基にポンプ吐出側の圧力を推定末端圧力一定制御することを特徴とする。
【発明の効果】
【0020】
請求項1ないし請求項4に記載の可変速給水装置によれば、吸込側に圧力センサや水位センサを設置することなく、低コストで水位の変化に対応して推定末端圧力制御の演算式を補正することができる給水装置を提供することができる。
【発明を実施するための最良の形態】
【0021】
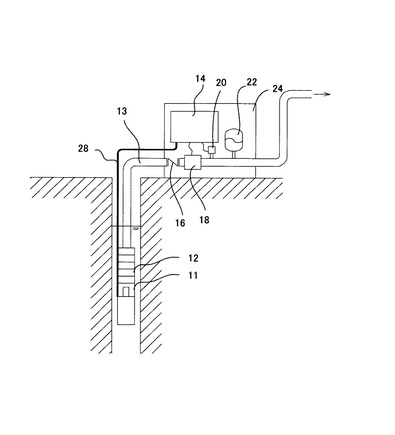
以下、図面を参照してこの発明の実施の形態を説明する。図1は、深井戸から揚水して需要者に供給する給水装置であり、井戸内に設置した水中ポンプ11と、この水中ポンプ11から導出された吐出し配管13と、水中ポンプ11に給電しかつこれを制御するための機器および制御装置を収容する制御盤14とを有している。吐出し配管13には、逆止弁16、フロースイッチ18、圧力センサ20、および圧力タンク22が設けられ、これらと制御盤14は地上ユニット24内に収容されている。
【0022】
水中ポンプ11は駆動モータ12を備えており、駆動モータ12には、制御盤14内に設置されたインバータ26から制御された周波数の交流がケーブル28を介して供給される。圧力タンク22内には所定のガスが封入されており、需要者側が不使用である場合に給水装置が稼動を続ければこの圧力が上昇する。圧力センサ20はこの圧力を検出し、その出力信号を制御盤14に設置された制御装置30に送る。圧力タンク22と逆止弁16の作用で、ポンプが停止した後でも、吐出配管内の圧力は、水が使用されないかぎり一定圧力に保持される。ポンプ吐出側に設けたフロースイッチ18は、吐出し配管13内の流量が一定以下の小水量になったことを検出するもので、例えば、ポンプが所定速度で回転しているのに小水量であるときに、弁の詰まり等の異常を検出できるようになっている。
【0023】
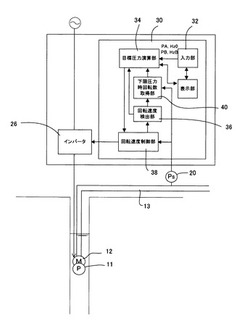
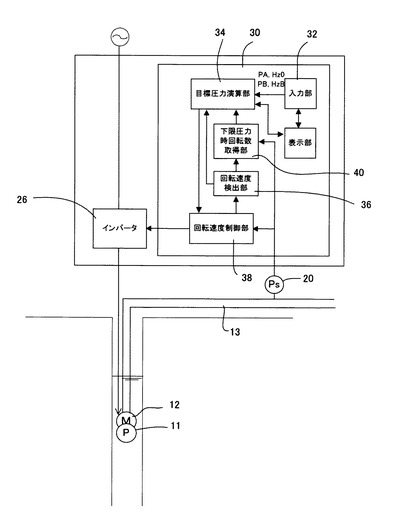
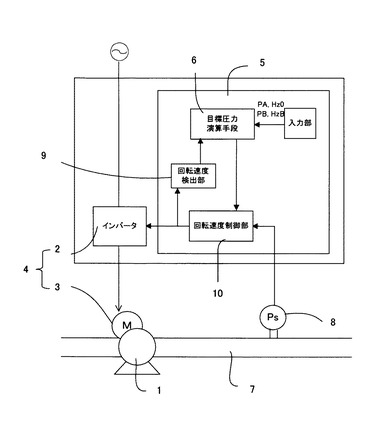
図2に示すように、制御装置30には、種々の運転操作や条件を入力するための入力部32と、入力された設定値に基づいて目標圧力を演算する目標圧力演算部34と、ポンプの回転数を検出する回転数検出部36と、目標圧力演算部34からの目標圧力出力値と圧力センサ20からの測定出力値に基づいてインバータ26の出力周波数を指示する回転数制御部38とを有している。この制御装置30の基本的な構成は、図7に示す従来の場合と同様である。また、回転数検出部36は、回転制御部の出力を直接に検出している。
【0024】
制御盤14には、圧力設定機能があり、「始動圧力Pstart」や「停止圧力Pstop」を設定することができる。制御盤14には表示パネル(図示略)が設けられ、ポンプを「手動運転」したり「自動運転」したりと様々に操作できるようになっている。「手動運転」では、運転周波数をマニュアル操作し任意の周波数でポンプを運転させる。「自動運転」では、後述するように、吐出圧力が設定値(始動圧力)以下になるとポンプを起動させて推定末端圧力一定制御を行い、水量が減ってフロースイッチ18が作動すると圧力タンク22に(例えば、停止圧力まで)蓄圧してポンプを停止させる。なお、小水量検知手段としてはフロースイッチ18のほか、ポンプ回転数や電動機電力の低下をその判断条件とする方法もある。また、始動圧力としては流量がゼロの点での目標圧力PBやその近傍の値が用いられる。
【0025】
上記構成の可変速給水装置において、目標圧力演算部34は回転数Hzxに対応する目標圧力PVを、回転数Hzxの関数{PV=f(Hzx)}により算出し、該目標圧力を表す目標圧力PVの信号を出力する。また、回転数制御部38は目標圧力PVと吐出水圧Poとに応答して、該吐出水圧Poが目標圧力PVに一致するように、駆動モータ12を速度制御する。
【0026】
この装置における推定末端圧力一定制御の方法は、図8を用いて説明した従来の可変速給水装置における場合と同様である。すなわち、以下のような数値を設定しておく。
PA:この給水系における最大水量目標圧力
PB:この給水系における締切目標圧力
Hz0:ポンプの最高回転数(通常50Hz又は60Hz)
HzB:締切目標圧力PBを締めきり(流量0)で出すためのポンプの回転数
【0027】
そして、目標圧力演算部34は、ポンプ回転数Hzxの入力に基づいて、
a)Hzx<HzBのとき
PV=PB (1)
b)HzB≦Hzx≦Hz0では
PV=((Hzx-HzB)/(Hz0-HzB))1/2×(PA-PB)+PB (2)
c)Hz0<Hzxのとき
PV=PA (3)
のようにして、逐次目標圧力PVを演算する。
【0028】
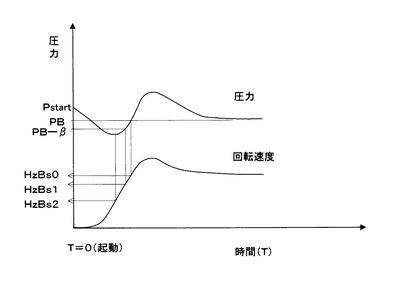
制御装置30において、従来の場合と異なる点は、ポンプの始動時に、圧力センサ20の出力値に基づいて所定のタイミングで、締切目標圧力PBを締めきり(流量0)で出すためのポンプの回転数HzBs(締切目標回転数)を取り込む締切目標回転数取得部40が設けられている点である。この締切目標回転数取得部40は、図4に示すように、ポンプの始動時に、圧力センサ20の出力値がPBまたはその近傍の値となった時の回転数HzBsを取り込む。この過程について以下説明する。
【0029】
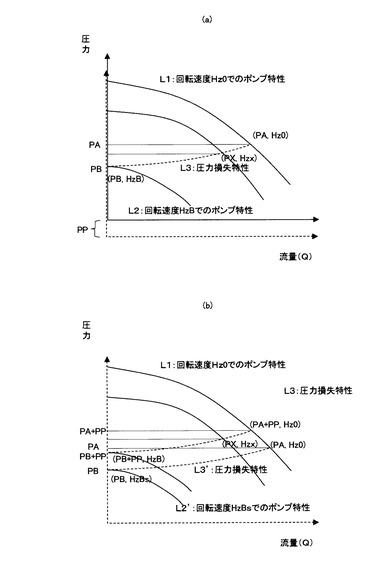
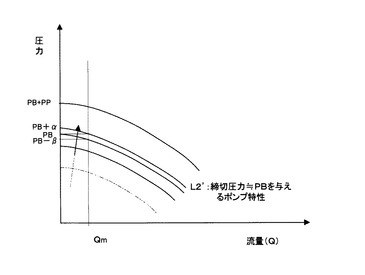
図3(a)は、図8において説明した通常のポンプの動作特性の図であり、実線の座標は、井戸の水位が基準位置にある場合を示す。ここで、水位が基準位置より上昇し、正の吸込圧力(押し込み圧力)Ppが生じた場合を考えると、図3(b)に示すように、ポンプの性能曲線は上にシフトする。そこで、この状態での締切目標圧力PBを締めきり(流量0)で出すためのポンプの回転数HzBsを新たに求める、すなわちポンプ特性L2’を求めることが課題となる。
【0030】
ポンプは、図4に示すように、圧力センサ20の出力値が始動圧力Pstart以下になった時に起動する。この始動圧力Pstartは、一般に締切目標圧力PBより大きく設定されている。ポンプが起動しても、回転数が充分に上昇しない間は圧力の低下が続き、圧力はPB以下になり、ある時点において圧力は上昇に転じる。圧力が下降している間は、ポンプは安定状態ではなく、つまり特性曲線上で運転していないが、上昇に転じてからは、特性曲線上で運転していると考えられる。この間のポンプの運転点の変化は、図5に模式的に示される。ここで、Qmは、起動時の小流量範囲であり、2点鎖線は非安定運転状態を、実線は安定運転状態を示す。
【0031】
これらの図を見れば分かるように、ある回転数におけるポンプ特性は、流量が少ない間はフラットな曲線である。従って、小水量である場合には、その時の吐出圧力はその回転数での締切圧力にほぼ等しい。そこで、小水量であることが分かっているポンプ起動時に、特性曲線に沿って動作している時には、吐出圧力がPBを示した時の回転数HzBs1が、新たな締切目標回転数HzBsに近似した値となると考えられる。
【0032】
ここで、図5に示すように、このときの水量Qmは厳密には0でないので、回転数HzBsのポンプ特性曲線の締切圧力はPB+αとなり、PBよりやや高くなる。その差αは実際上問題になるものではないが、この差を見込んで締切圧力がPBとなるように、圧力が(PB−β)となる時の回転数HzBs2を締切目標回転数とするのが、第2の方法である。この方法は原理的には正確であるが、流量が分かっていない以上、βの値を推定することが困難であるという問題が有る。例えば、βを大きくとりすぎると、圧力がそこまで低下しない場合には、HzBs2を取り込むことができない事態が生じる。そこで、圧力が下降から上昇に転じた時の回転数HzBs3を用いることが考えられる。ポンプ吐出圧力が上昇に転じてからは、特性曲線上で運転していると考えられその特性曲線はL2’に近いものと考えられるからである。
【0033】
以上3つの値の特徴としては、圧力がPBを示した時の回転数HzBs1は本来の値よりやや高めとなり、圧力が(PB−β)となる時の回転数HzBs2は近似程度は良いがβの設定が難しく、圧力が下降から上昇に転じた時の回転数HzBs3はやや低めの値となる。そこで、これらの値の幾つかを組み合わせて用いることにより、欠点を補うことが考えられる。例えば、圧力がPBを示した時の回転数HzBs1と、圧力が下降から上昇に転じた時の回転数HzBs3との間の適当な値を用いることが考えられる。この場合、単純平均値でも、重み付けをした平均値でも、他の算出方法でもよい。または、圧力が(PB−β)となる時の回転数HzBs2を優先して用い、それが得られない時には、圧力が下降から上昇に転じた時の回転数HzBs3を用いるようにしていもよい。
【0034】
この結果得られた締切目標回転数HzBsを当初の締切目標回転数HzBと置き換えることにより、この吸込圧力における推定末端圧力一定制御が行われる。具体的には、目標圧力演算部34は、ポンプ回転数Hzxの入力に基づいて、
a)Hzx<HzBsのとき
PV=PB (1’)
b)HzBs≦Hzx≦Hz0では
PV={(PA−PB)/(Hz0−HzBs)}×(Hzx−HzBs)+PB (2’)
c)Hz0<Hzxのとき
PV=PA (3’)
のようにして、逐次目標圧力PVを演算する。この(2’)の式では、図3(b)における圧力損失特性L3’に沿って制御が行われる。
【0035】
なお、この実施形態では、式(2)のHzBの置換を行って補正しており、Hz0の補正は行っていない。実際にはHz0も吸込圧力の変動に伴って変動するが、簡便のため、HzBの置換のみでも効果は得られる。
【0036】
このように得られたHzBは、流量0の時にPBを出す回転数ではないものの、その近傍の値となり実用上問題ない。また、このように得られたHzBでも、井戸の水位が低下すれば(吸込圧力が低下すれば)HzBは大きくなり、井戸の水位が低下すれば(吸込圧力が上昇すれば)HzBは小さくなるという傾向に変わりはないため、吸込圧力の補正を行わない場合に比べ、需要先の圧力変動が小さくなり、無駄な消費エネルギーも抑制することが可能になる。
また、流量が流れている状態での検出となるため、ポンプは締め切り状態であることはないので、締め切り状態を見分けるための余計なプロセスがいらない。
【0037】
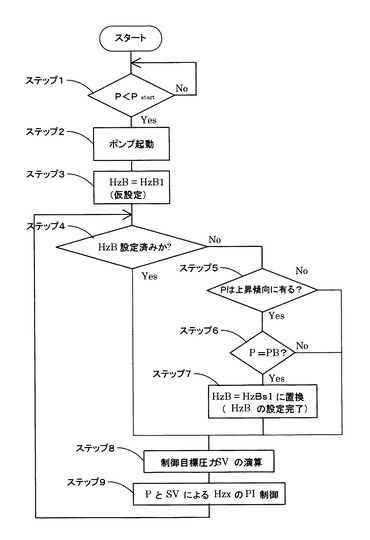
図7を参照しつつ、この実施の形態の可変速給水装置の動作を説明する。ここでは、上述した方法のうち、圧力PがPBを示した時の回転数HzBs1を採用する。まず、制御装置30は、ステップ1において、圧力センサ20の出力値Pが始動圧力Pstart以下になったかどうかを判断し、以下であれば、ステップ2においてポンプを起動する。次に、ステップ3において、ポンプの運転制御を行うための仮のHzBの値としてHzB0を設定する。このHzB0の使用は、新たなHzBsが取得されるまでの極く短い時間であり、通常は、ポンプの前回運転時に設定されたHzBを用いる。
【0038】
次に、ステップ4において、既に新たなHzBが設定済みか判定される。最初はもちろん設定されていないため、HzBを設定するためのルーチンに入り、ステップ5において、Pが上昇傾向に転じたかどうかを判断する。Pが下降傾向に有る間は、ポンプがその特性曲線に沿って安定運転していないので、新たなHzBsを取り込むことができないからである。Pが上昇傾向に転じたと判断した場合には、ステップ6において、PがPBに達したかどうかを判断し、達している場合には、ステップ7においてその時の回転数HzxをHzBs1として取り込み、HzBに置換する。
【0039】
以降は、新たな締切目標回転数HzBsを用いて、ステップ8において式(2)により制御目標圧力(SV)を算出し、ステップ9において、例えば、圧力センサ20の出力値Pと算出したSVとにより、回転数HzxのPI制御を行う。そして、ステップ4に戻り、新たなHzBが設定済みか判定されるが、既に設定済みであるので、以降は、ステップ8,9を順次繰り返す。
【0040】
一方、ステップ5,ステップ6の条件が充足されていない場合には、ステップ8,9を経てステップ4に戻り、再度ステップ5,6を実行し、これらの条件が充足されるまで、このルーチンを繰り返す。ステップ6においては、PBの前後数%の中に入っていればPBであると判定するようにしてもよい。この場合、PstartがPBよりも大きい時には、ポンプ始動時に圧力がPB以下にならなかったり、ポンプ始動後の圧力低下中にPBを通過する可能性があるが、その時には圧力が上昇に転じた時のHzx、または、上昇に転じた後にPBとなったときのHzxを用いてHzBを設定すればよい。
【0041】
図6の工程では、圧力Pが下降から上昇に転じた時の回転数を採用したが、圧力がHzBs3PBを示した時の回転数HzBs1や、圧力が(PB−β)となる時の回転数HzBs2、あるいはこれらを組み合わせて用いる場合も同様である。
【0042】
以上の実施の形態では、得られた回転数HzBを、目標圧力演算式(3)を書き換える値として用いたが、この回転数HzBから得られる対応する基準圧力P0と、あらかじめ定めた圧力値PBとの差から吸込圧力値Ppを演算により求め、吸込圧力値Ppによって制御してもよい。このようにPpを求めて制御すれば、従来圧力センサ20によりPpを入力して補正していた制御プロセスをそのまま利用することが出来る。
【0043】
この実施の形態のように、井戸ポンプの場合、水道本管に直結された直結型給水装置と比べて、ポンプ運転中の吸込圧力の変動(水位の変動)は頻繁ではなく、季節による地下水位変動の方の影響が大きい。したがって、本発明のようにポンプ起動時に吸込圧力の補正値を決定するのは、井戸ポンプに特に好適である。
【0044】
もちろん、この発明は井戸ポンプに限られるものではなく、押し込み圧力が変動するような水源からの給水装置に適用することができる。例えば、水位の変動が頻繁であるような場合でも、起動時に必ず補正を行うようにしておけば、定常的に自動的な補正がなされて、常に適切な推定末端圧力一定制御を行なうことができる。
【図面の簡単な説明】
【0045】
【図1】この発明の可変速給水装置の全体の構成を示す図である。
【図2】この発明の可変速給水装置の制御部の構成を示す図である。
【図3】この発明の可変速給水装置の動作を説明する図である。
【図4】この発明の可変速給水装置の制御工程を説明する図である。
【図5】同じく、この発明の可変速給水装置の制御工程を説明する図である。
【図6】この発明の可変速給水装置の制御工程を説明するフロー図である。
【図7】従来の可変速給水装置を示す図である。
【図8】従来の可変速給水装置の動作を説明する図である。
【図9】従来の井戸用の可変速給水装置を示す図である。
【符号の説明】
【0046】
11 水中ポンプ
12 駆動モータ
13 吐出し配管
14 制御盤
15 表示パネル
16 逆止弁
18 フロースイッチ
20 圧力センサ
22 圧力タンク
24 地上ユニット
26 インバータ
28 ケーブル
30 制御装置
32 入力部
34 目標圧力演算部
36 回転数検出部
38 回転数制御部
40 締切目標回転数取得部
【技術分野】
【0001】
本発明は、例えば、井戸から水を汲み上げるために用いられる、インバータなどの周波数変換器によって可変速運転されるモータポンプを備えた可変速給水装置に関する。
【背景技術】
【0002】
例えば、ポンプの駆動源として、周波数変換器(インバータ)によって回転を制御することができるモータを用い、ポンプを可変速運転することが広く行われている。インバータを用いることによって、電源を問わず運転が可能であり、また、可変速運転することによって、ポンプ吐出側を圧力一定制御するような制御が可能になる。
【0003】
図7は、可変速運転を行うポンプを用いた従来の給水システムを示すもので、給水ポンプ1と、該ポンプ1を駆動するインバータ2とモータ3を有する可変速電動機4と、インバータ2の出力する電力の周波数を制御する制御装置5を有している。制御装置5は、所定のロジックに沿って制御目標の圧力を算出する目標圧力演算手段6と、給水ポンプ1の吐出管7に設けられ該吐出管7の吐出水圧Poを検出して該吐出水圧Poの信号を出力する圧力検出手段8と、可変速電動機4の回転数を検出して、該回転数Hzxの信号を出力する回転数検出部9と、圧力検出手段8が検出した吐出水圧Poを算出された制御目標圧力と一致させるようにインバータ2の出力を制御する回転数制御手段10を有している。この例では、回転数検出部は、回転制御部の出力を直接に検出する。
【0004】
ポンプ運転中は、配管内圧力を圧力検出手段8で検出し、運転状態に応じた目標圧力を演算しながら、モータ3をインバータ2により可変速運転し、目標圧力より高い場合は回転数を下げ、目標圧力より低い場合は回転数を上げて、ポンプ吐出側を目標圧力値一定となるように制御する。さらに、運転状況に応じて温水シャワー等の末端機器における圧力が一定になるように目標圧力を変化させると、推定末端圧力一定制御となる。このようにポンプを可変速制御すると、ポンプ吐出側の圧力変動を低く抑えられるばかりでなく、従来オンオフ制御をしていた時に比べて圧力タンクが小さくてすむので、地上ユニットを小型にできる。
【0005】
上記構成の可変速給水装置において、目標圧力演算手段6は回転数Hzxに対応する目標圧力PVを、回転数Hzxの関数{PV=f(Hzx)}により算出し、該目標圧力を表す目標圧力PVの信号を出力する。また、回転数制御手段10は目標圧力PVと吐出水圧Poとに応答して、該吐出水圧Poが目標圧力PVに一致するように、可変速電動機4を速度制御する。
【0006】
図8は、このような従来の可変速給水装置におけるポンプ流量と圧力の関係を説明する図である。この図において用いられている符号は、以下のとおりである。
PA:最大水量目標圧力(=最高位位置までの揚程+最高位位置の必要圧力+最大水量時の配管抵抗)
PB:締切目標圧力(=最高位位置までの揚程+最高位位置の必要圧力)
Hzx:回転数検出部において検出されるポンプ回転速度値
Hz0:ポンプの最高回転数(通常50Hz又は60Hz)
HzB:締切目標圧力PBを締切(流量0)で出すためのポンプの回転数
PA,PBは、給水系の仕様としてシステムの立ち上げ時に入力手段より設定する。HzBは、締切目標圧力PBとポンプによって決まる値で、ポンプ特性上、一般に、HzB=(PB/P0)1/2×Hz0で表される。図中、線L0,LBは、それぞれ回転数Hz0、HzBにおけるポンプの性能曲線であり、線LLは、ポンプから端末機器までの配管における圧力損失を表す曲線である。
【0007】
このように設定された状態で、目標圧力演算手段6においては、ポンプ回転数Hzxの入力により、
a)Hzx<HzBのとき
PV=PB (1)
b)HzB≦Hzx≦Hz0では
PV=((Hzx-HzB)/(Hz0-HzB))1/2×(PA-PB)+PB (2)
c)Hz0<Hzxのとき
PV=PA (3)
にて、逐次目標圧力PVを演算するようにプログラムされている。これによれば、ポンプ回転数が低い場合には目標圧力を締切目標圧力PBに導くように、ポンプ回転数が高い場合には目標圧力を最大水量目標圧力PAに導くように、その中間の回転数では、最大運転点と最小運転点を結ぶ直線上の点の圧力に導くように、ポンプが制御される。この曲線は、圧力損失特性曲線LLを近似するものである。このような方法により、流量計を用いることなく、流量に係わらず末端圧力を一定に制御し、円滑な機器動作と、エネルギーの節約という効果を得ることができる。
【0008】
ところで、このようなポンプが井戸等の水源に設置される場合がある。図9は、深井戸から揚水して需要者に供給する給水装置であり、井戸内に設置した水中ポンプ11と、この水中ポンプ11から導出された吐出し配管13と、水中ポンプ11に給電しかつこれを制御するための機器および制御装置を収容する制御盤14とを有している。吐出し配管13には、逆止弁16、フロースイッチ18、圧力センサ20、および圧力タンク22が設けられ、これらと制御盤14は地上ユニット24内に収容されている。この給水装置においても、図7に示す構成の制御装置5により、図8に示すような推定末端圧力一定制御が行われる。
【0009】
このような井戸のような水源では、季節の変化や使用状況等によって水位が変動する場合が有る。上記のような推定末端圧力一定制御は、吸込側の圧力が一定であるという前提で行われているので、水位変動等により吸込側の圧力が変化すると、正確な末端圧力一定制御ができなくなり、圧力変動が大きくなってしまう。このような圧力上昇は余分な動力の使用であり、一方、圧力低下は需要家の不便に直結するため、PAやPBを余裕を持って高めに設定することになり、やはり、余分な動力の使用につながる。
【0010】
【特許文献1】特許1892600号公報
【特許文献2】特許第3291007号公報
【発明の開示】
【発明が解決しようとする課題】
【0011】
従って、井戸のような水源において、推定末端圧力一定制御を効率よく実施するには、吸込側の圧力変化に基づいて推定末端圧力制御の演算式を補正する必要が有る。吸込側の圧力変化を知る方法として、井戸に水位計を設置して、水位から吸込側の圧力を算出する方法や、吸込側に圧力センサを設けて吸込側の圧力を測定する方法が考えられる。
【0012】
例えば、図9に示すように、井戸に水位センサ29を設置して水位から吸込側の圧力を算出する方法が考えられる。この水位センサ29は、井戸地上面から井戸水面に超音波を当て反射により水位を測定するものである。この水位センサ29により水位の変動値を検出し、この値を吸込圧力変動値として目標圧力演算手段の演算式を逐次補正する。補正方法については、特許文献2等に提案されている。このように、水位センサにより水位の変動値PPを検出すれば、井戸水位が変動してもポンプ吐出側を推定末端圧力制御することができる。この水位センサ29による補正制御を用いれば、精度の良い推定末端圧力制御が可能となる。
【0013】
しかしながら、水位センサ29や圧力センサの設置には、コストが掛かる。また、設置場所が井戸内というメンテナンスのしにくい環境であることを考慮すると、これらを安定に動作させるためには、かなりのメンテナンスコストも必要になる。また吸込側に圧力センサを設ける方法については、圧力センサを取り付ける吸込配管が必要だが、水中ポンプの場合、構造的に吸込配管を持たないため、吸込側圧力センサを取り付けることができない。
【0014】
一方、ポンプ低負荷状態で特定のポンプ回転数における実際に検出される吐出圧力を締切状態でのそのポンプ回転数における吐出圧力の近似値として用いて、試運転時に押込み側圧力値を補正する方法が考えられる。しかしながら、低負荷を検出するために極小水量を検出するフロースイッチのような流量検出器を用いた場合、フロースイッチでは極小水量と締め切り状態の区別がつかないので、実用的ではない。もちろん、流量計を用いればよいが、流量計は高価であって吸込側に圧力センサ等を用いない利点が相殺されてしまう。また、いずれを用いる場合でも、需要水量が急激に0になったときなどは、ポンプの運転速度の減速が間に合わずに、吐出側の検出圧力が、その時の水量に対する本来あるべき圧力よりもかなり高くなってしまうため、吸込側圧力の補正値が大きくずれてしまうことがある。
【0015】
本発明は、前記事情に鑑みて為されたもので、吸込側に圧力センサや水位センサを設置することなく、低コストで水位の変化に対応して推定末端圧力制御の演算式を補正することができる給水装置を提供することを目的とする。
【課題を解決するための手段】
【0016】
前記目的を達成するために、請求項1に記載の可変速給水装置は、可変速モータを使用したポンプを用い、ポンプ吐出側の圧力を推定末端圧力一定制御する可変速給水装置において、前記推定末端圧力一定制御における締切目標圧力を得るための締切目標回転数として、前記推定末端圧力一定制御における締切目標圧力を得るための締切目標回転数として、ポンプ始動時の特定の圧力状態における回転速度値を取り込んで用いることを特徴とする。
【0017】
ここで、ポンプ始動時の特定の圧力状態とは、回転速度値を取り込むためのトリガーとして制御上予め定められたポンプ始動時の圧力の条件を言い、ポンプ始動時における小水量状態であって、ポンプが締切目標圧力の近傍で運転していると推定される状態であることが望ましい。このような構成により、吸込側の圧力を直接または間接に検出する手段を設けることなく、推定末端圧力一定制御の基準となる締切目標回転数を取得することができる。
【0018】
請求項2に記載の可変速給水装置は、請求項1に記載の発明において、前記締切目標回転数として、ポンプ吐出側の圧力が下降傾向から上昇傾向に転じた後のポンプの回転速度値を用いることを特徴とする。ポンプ始動時において、ポンプ吐出側の圧力が下降傾向から上昇傾向に転じた後は、ポンプはその特性曲線に沿って安定的に運転していると考えられる。従って、ポンプが締切目標圧力の近傍で運転していると推定され、かつ小水量状態であれば、その吐出し側圧力から締切目標回転数を取得することができる。
【0019】
請求項3に記載の可変速給水装置は、請求項1または請求項2に記載の発明において、前記締切目標回転数として、ポンプ吐出側の圧力が締切目標圧力またはこれに近い値になった時のポンプの回転速度値を用いることを特徴とする。
請求項4に記載の可変速給水装置は、請求項1ないし請求項3のいずれかに記載の発明において、前記取り込まれた締切目標回転数に基づいてポンプ吸込み側の基準圧力値の変化を算出し、これを基にポンプ吐出側の圧力を推定末端圧力一定制御することを特徴とする。
【発明の効果】
【0020】
請求項1ないし請求項4に記載の可変速給水装置によれば、吸込側に圧力センサや水位センサを設置することなく、低コストで水位の変化に対応して推定末端圧力制御の演算式を補正することができる給水装置を提供することができる。
【発明を実施するための最良の形態】
【0021】
以下、図面を参照してこの発明の実施の形態を説明する。図1は、深井戸から揚水して需要者に供給する給水装置であり、井戸内に設置した水中ポンプ11と、この水中ポンプ11から導出された吐出し配管13と、水中ポンプ11に給電しかつこれを制御するための機器および制御装置を収容する制御盤14とを有している。吐出し配管13には、逆止弁16、フロースイッチ18、圧力センサ20、および圧力タンク22が設けられ、これらと制御盤14は地上ユニット24内に収容されている。
【0022】
水中ポンプ11は駆動モータ12を備えており、駆動モータ12には、制御盤14内に設置されたインバータ26から制御された周波数の交流がケーブル28を介して供給される。圧力タンク22内には所定のガスが封入されており、需要者側が不使用である場合に給水装置が稼動を続ければこの圧力が上昇する。圧力センサ20はこの圧力を検出し、その出力信号を制御盤14に設置された制御装置30に送る。圧力タンク22と逆止弁16の作用で、ポンプが停止した後でも、吐出配管内の圧力は、水が使用されないかぎり一定圧力に保持される。ポンプ吐出側に設けたフロースイッチ18は、吐出し配管13内の流量が一定以下の小水量になったことを検出するもので、例えば、ポンプが所定速度で回転しているのに小水量であるときに、弁の詰まり等の異常を検出できるようになっている。
【0023】
図2に示すように、制御装置30には、種々の運転操作や条件を入力するための入力部32と、入力された設定値に基づいて目標圧力を演算する目標圧力演算部34と、ポンプの回転数を検出する回転数検出部36と、目標圧力演算部34からの目標圧力出力値と圧力センサ20からの測定出力値に基づいてインバータ26の出力周波数を指示する回転数制御部38とを有している。この制御装置30の基本的な構成は、図7に示す従来の場合と同様である。また、回転数検出部36は、回転制御部の出力を直接に検出している。
【0024】
制御盤14には、圧力設定機能があり、「始動圧力Pstart」や「停止圧力Pstop」を設定することができる。制御盤14には表示パネル(図示略)が設けられ、ポンプを「手動運転」したり「自動運転」したりと様々に操作できるようになっている。「手動運転」では、運転周波数をマニュアル操作し任意の周波数でポンプを運転させる。「自動運転」では、後述するように、吐出圧力が設定値(始動圧力)以下になるとポンプを起動させて推定末端圧力一定制御を行い、水量が減ってフロースイッチ18が作動すると圧力タンク22に(例えば、停止圧力まで)蓄圧してポンプを停止させる。なお、小水量検知手段としてはフロースイッチ18のほか、ポンプ回転数や電動機電力の低下をその判断条件とする方法もある。また、始動圧力としては流量がゼロの点での目標圧力PBやその近傍の値が用いられる。
【0025】
上記構成の可変速給水装置において、目標圧力演算部34は回転数Hzxに対応する目標圧力PVを、回転数Hzxの関数{PV=f(Hzx)}により算出し、該目標圧力を表す目標圧力PVの信号を出力する。また、回転数制御部38は目標圧力PVと吐出水圧Poとに応答して、該吐出水圧Poが目標圧力PVに一致するように、駆動モータ12を速度制御する。
【0026】
この装置における推定末端圧力一定制御の方法は、図8を用いて説明した従来の可変速給水装置における場合と同様である。すなわち、以下のような数値を設定しておく。
PA:この給水系における最大水量目標圧力
PB:この給水系における締切目標圧力
Hz0:ポンプの最高回転数(通常50Hz又は60Hz)
HzB:締切目標圧力PBを締めきり(流量0)で出すためのポンプの回転数
【0027】
そして、目標圧力演算部34は、ポンプ回転数Hzxの入力に基づいて、
a)Hzx<HzBのとき
PV=PB (1)
b)HzB≦Hzx≦Hz0では
PV=((Hzx-HzB)/(Hz0-HzB))1/2×(PA-PB)+PB (2)
c)Hz0<Hzxのとき
PV=PA (3)
のようにして、逐次目標圧力PVを演算する。
【0028】
制御装置30において、従来の場合と異なる点は、ポンプの始動時に、圧力センサ20の出力値に基づいて所定のタイミングで、締切目標圧力PBを締めきり(流量0)で出すためのポンプの回転数HzBs(締切目標回転数)を取り込む締切目標回転数取得部40が設けられている点である。この締切目標回転数取得部40は、図4に示すように、ポンプの始動時に、圧力センサ20の出力値がPBまたはその近傍の値となった時の回転数HzBsを取り込む。この過程について以下説明する。
【0029】
図3(a)は、図8において説明した通常のポンプの動作特性の図であり、実線の座標は、井戸の水位が基準位置にある場合を示す。ここで、水位が基準位置より上昇し、正の吸込圧力(押し込み圧力)Ppが生じた場合を考えると、図3(b)に示すように、ポンプの性能曲線は上にシフトする。そこで、この状態での締切目標圧力PBを締めきり(流量0)で出すためのポンプの回転数HzBsを新たに求める、すなわちポンプ特性L2’を求めることが課題となる。
【0030】
ポンプは、図4に示すように、圧力センサ20の出力値が始動圧力Pstart以下になった時に起動する。この始動圧力Pstartは、一般に締切目標圧力PBより大きく設定されている。ポンプが起動しても、回転数が充分に上昇しない間は圧力の低下が続き、圧力はPB以下になり、ある時点において圧力は上昇に転じる。圧力が下降している間は、ポンプは安定状態ではなく、つまり特性曲線上で運転していないが、上昇に転じてからは、特性曲線上で運転していると考えられる。この間のポンプの運転点の変化は、図5に模式的に示される。ここで、Qmは、起動時の小流量範囲であり、2点鎖線は非安定運転状態を、実線は安定運転状態を示す。
【0031】
これらの図を見れば分かるように、ある回転数におけるポンプ特性は、流量が少ない間はフラットな曲線である。従って、小水量である場合には、その時の吐出圧力はその回転数での締切圧力にほぼ等しい。そこで、小水量であることが分かっているポンプ起動時に、特性曲線に沿って動作している時には、吐出圧力がPBを示した時の回転数HzBs1が、新たな締切目標回転数HzBsに近似した値となると考えられる。
【0032】
ここで、図5に示すように、このときの水量Qmは厳密には0でないので、回転数HzBsのポンプ特性曲線の締切圧力はPB+αとなり、PBよりやや高くなる。その差αは実際上問題になるものではないが、この差を見込んで締切圧力がPBとなるように、圧力が(PB−β)となる時の回転数HzBs2を締切目標回転数とするのが、第2の方法である。この方法は原理的には正確であるが、流量が分かっていない以上、βの値を推定することが困難であるという問題が有る。例えば、βを大きくとりすぎると、圧力がそこまで低下しない場合には、HzBs2を取り込むことができない事態が生じる。そこで、圧力が下降から上昇に転じた時の回転数HzBs3を用いることが考えられる。ポンプ吐出圧力が上昇に転じてからは、特性曲線上で運転していると考えられその特性曲線はL2’に近いものと考えられるからである。
【0033】
以上3つの値の特徴としては、圧力がPBを示した時の回転数HzBs1は本来の値よりやや高めとなり、圧力が(PB−β)となる時の回転数HzBs2は近似程度は良いがβの設定が難しく、圧力が下降から上昇に転じた時の回転数HzBs3はやや低めの値となる。そこで、これらの値の幾つかを組み合わせて用いることにより、欠点を補うことが考えられる。例えば、圧力がPBを示した時の回転数HzBs1と、圧力が下降から上昇に転じた時の回転数HzBs3との間の適当な値を用いることが考えられる。この場合、単純平均値でも、重み付けをした平均値でも、他の算出方法でもよい。または、圧力が(PB−β)となる時の回転数HzBs2を優先して用い、それが得られない時には、圧力が下降から上昇に転じた時の回転数HzBs3を用いるようにしていもよい。
【0034】
この結果得られた締切目標回転数HzBsを当初の締切目標回転数HzBと置き換えることにより、この吸込圧力における推定末端圧力一定制御が行われる。具体的には、目標圧力演算部34は、ポンプ回転数Hzxの入力に基づいて、
a)Hzx<HzBsのとき
PV=PB (1’)
b)HzBs≦Hzx≦Hz0では
PV={(PA−PB)/(Hz0−HzBs)}×(Hzx−HzBs)+PB (2’)
c)Hz0<Hzxのとき
PV=PA (3’)
のようにして、逐次目標圧力PVを演算する。この(2’)の式では、図3(b)における圧力損失特性L3’に沿って制御が行われる。
【0035】
なお、この実施形態では、式(2)のHzBの置換を行って補正しており、Hz0の補正は行っていない。実際にはHz0も吸込圧力の変動に伴って変動するが、簡便のため、HzBの置換のみでも効果は得られる。
【0036】
このように得られたHzBは、流量0の時にPBを出す回転数ではないものの、その近傍の値となり実用上問題ない。また、このように得られたHzBでも、井戸の水位が低下すれば(吸込圧力が低下すれば)HzBは大きくなり、井戸の水位が低下すれば(吸込圧力が上昇すれば)HzBは小さくなるという傾向に変わりはないため、吸込圧力の補正を行わない場合に比べ、需要先の圧力変動が小さくなり、無駄な消費エネルギーも抑制することが可能になる。
また、流量が流れている状態での検出となるため、ポンプは締め切り状態であることはないので、締め切り状態を見分けるための余計なプロセスがいらない。
【0037】
図7を参照しつつ、この実施の形態の可変速給水装置の動作を説明する。ここでは、上述した方法のうち、圧力PがPBを示した時の回転数HzBs1を採用する。まず、制御装置30は、ステップ1において、圧力センサ20の出力値Pが始動圧力Pstart以下になったかどうかを判断し、以下であれば、ステップ2においてポンプを起動する。次に、ステップ3において、ポンプの運転制御を行うための仮のHzBの値としてHzB0を設定する。このHzB0の使用は、新たなHzBsが取得されるまでの極く短い時間であり、通常は、ポンプの前回運転時に設定されたHzBを用いる。
【0038】
次に、ステップ4において、既に新たなHzBが設定済みか判定される。最初はもちろん設定されていないため、HzBを設定するためのルーチンに入り、ステップ5において、Pが上昇傾向に転じたかどうかを判断する。Pが下降傾向に有る間は、ポンプがその特性曲線に沿って安定運転していないので、新たなHzBsを取り込むことができないからである。Pが上昇傾向に転じたと判断した場合には、ステップ6において、PがPBに達したかどうかを判断し、達している場合には、ステップ7においてその時の回転数HzxをHzBs1として取り込み、HzBに置換する。
【0039】
以降は、新たな締切目標回転数HzBsを用いて、ステップ8において式(2)により制御目標圧力(SV)を算出し、ステップ9において、例えば、圧力センサ20の出力値Pと算出したSVとにより、回転数HzxのPI制御を行う。そして、ステップ4に戻り、新たなHzBが設定済みか判定されるが、既に設定済みであるので、以降は、ステップ8,9を順次繰り返す。
【0040】
一方、ステップ5,ステップ6の条件が充足されていない場合には、ステップ8,9を経てステップ4に戻り、再度ステップ5,6を実行し、これらの条件が充足されるまで、このルーチンを繰り返す。ステップ6においては、PBの前後数%の中に入っていればPBであると判定するようにしてもよい。この場合、PstartがPBよりも大きい時には、ポンプ始動時に圧力がPB以下にならなかったり、ポンプ始動後の圧力低下中にPBを通過する可能性があるが、その時には圧力が上昇に転じた時のHzx、または、上昇に転じた後にPBとなったときのHzxを用いてHzBを設定すればよい。
【0041】
図6の工程では、圧力Pが下降から上昇に転じた時の回転数を採用したが、圧力がHzBs3PBを示した時の回転数HzBs1や、圧力が(PB−β)となる時の回転数HzBs2、あるいはこれらを組み合わせて用いる場合も同様である。
【0042】
以上の実施の形態では、得られた回転数HzBを、目標圧力演算式(3)を書き換える値として用いたが、この回転数HzBから得られる対応する基準圧力P0と、あらかじめ定めた圧力値PBとの差から吸込圧力値Ppを演算により求め、吸込圧力値Ppによって制御してもよい。このようにPpを求めて制御すれば、従来圧力センサ20によりPpを入力して補正していた制御プロセスをそのまま利用することが出来る。
【0043】
この実施の形態のように、井戸ポンプの場合、水道本管に直結された直結型給水装置と比べて、ポンプ運転中の吸込圧力の変動(水位の変動)は頻繁ではなく、季節による地下水位変動の方の影響が大きい。したがって、本発明のようにポンプ起動時に吸込圧力の補正値を決定するのは、井戸ポンプに特に好適である。
【0044】
もちろん、この発明は井戸ポンプに限られるものではなく、押し込み圧力が変動するような水源からの給水装置に適用することができる。例えば、水位の変動が頻繁であるような場合でも、起動時に必ず補正を行うようにしておけば、定常的に自動的な補正がなされて、常に適切な推定末端圧力一定制御を行なうことができる。
【図面の簡単な説明】
【0045】
【図1】この発明の可変速給水装置の全体の構成を示す図である。
【図2】この発明の可変速給水装置の制御部の構成を示す図である。
【図3】この発明の可変速給水装置の動作を説明する図である。
【図4】この発明の可変速給水装置の制御工程を説明する図である。
【図5】同じく、この発明の可変速給水装置の制御工程を説明する図である。
【図6】この発明の可変速給水装置の制御工程を説明するフロー図である。
【図7】従来の可変速給水装置を示す図である。
【図8】従来の可変速給水装置の動作を説明する図である。
【図9】従来の井戸用の可変速給水装置を示す図である。
【符号の説明】
【0046】
11 水中ポンプ
12 駆動モータ
13 吐出し配管
14 制御盤
15 表示パネル
16 逆止弁
18 フロースイッチ
20 圧力センサ
22 圧力タンク
24 地上ユニット
26 インバータ
28 ケーブル
30 制御装置
32 入力部
34 目標圧力演算部
36 回転数検出部
38 回転数制御部
40 締切目標回転数取得部
【特許請求の範囲】
【請求項1】
可変速モータを使用したポンプを用い、ポンプ吐出側の圧力を推定末端圧力一定制御する可変速給水装置において、
前記推定末端圧力一定制御における締切目標圧力を得るための締切目標回転数として、ポンプ始動時の特定の圧力状態における回転速度値を取り込んで用いることを特徴とする可変速給水装置。
【請求項2】
前記締切目標回転数として、ポンプ吐出側の圧力が下降傾向から上昇傾向に転じた後のポンプの回転速度値を用いることを特徴とする請求項1に記載の可変速給水装置。
【請求項3】
前記締切目標回転数として、ポンプ吐出側の圧力が締切目標圧力またはこれに近い値になった時のポンプの回転速度値を用いることを特徴とする請求項1または請求項2に記載の可変速給水装置。
【請求項4】
前記取り込まれた締切目標回転数に基づいてポンプ吸込み側の基準圧力値の変化を算出し、これを用いて補正した基準圧力値に基づいてポンプ吐出側の圧力を推定末端圧力一定制御することを特徴とする請求項1ないし請求項3のいずれかに記載の可変速給水装置。
【請求項1】
可変速モータを使用したポンプを用い、ポンプ吐出側の圧力を推定末端圧力一定制御する可変速給水装置において、
前記推定末端圧力一定制御における締切目標圧力を得るための締切目標回転数として、ポンプ始動時の特定の圧力状態における回転速度値を取り込んで用いることを特徴とする可変速給水装置。
【請求項2】
前記締切目標回転数として、ポンプ吐出側の圧力が下降傾向から上昇傾向に転じた後のポンプの回転速度値を用いることを特徴とする請求項1に記載の可変速給水装置。
【請求項3】
前記締切目標回転数として、ポンプ吐出側の圧力が締切目標圧力またはこれに近い値になった時のポンプの回転速度値を用いることを特徴とする請求項1または請求項2に記載の可変速給水装置。
【請求項4】
前記取り込まれた締切目標回転数に基づいてポンプ吸込み側の基準圧力値の変化を算出し、これを用いて補正した基準圧力値に基づいてポンプ吐出側の圧力を推定末端圧力一定制御することを特徴とする請求項1ないし請求項3のいずれかに記載の可変速給水装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2007−40135(P2007−40135A)
【公開日】平成19年2月15日(2007.2.15)
【国際特許分類】
【出願番号】特願2005−223591(P2005−223591)
【出願日】平成17年8月2日(2005.8.2)
【出願人】(000000239)株式会社荏原製作所 (1,477)
【Fターム(参考)】
【公開日】平成19年2月15日(2007.2.15)
【国際特許分類】
【出願日】平成17年8月2日(2005.8.2)
【出願人】(000000239)株式会社荏原製作所 (1,477)
【Fターム(参考)】
[ Back to top ]