
圃場情報生成システム
【課題】地中で生育する作物の収穫に基づいて圃場の各部の土壌の状態を正確に取得するシステムを構成する。
【解決手段】収穫機で収穫した人参Xをカメラ21で撮影し、この撮影により取得した撮影画像情報から人参Xの品質を品質判定ユニットJで判定して品質情報を生成し、この収穫時に位置情報取得ユニットKで位置情報を取得し、品質情報と位置情報とを関連付処理手段35により関連付けた圃場情報を生成する。
【解決手段】収穫機で収穫した人参Xをカメラ21で撮影し、この撮影により取得した撮影画像情報から人参Xの品質を品質判定ユニットJで判定して品質情報を生成し、この収穫時に位置情報取得ユニットKで位置情報を取得し、品質情報と位置情報とを関連付処理手段35により関連付けた圃場情報を生成する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、作物を収穫する収穫機に対して、この収穫機で収穫された前記作物の品質を判定する品質判定ユニットと、前記収穫機の位置情報を取得する位置情報取得ユニットとを備えている圃場情報生成システムに関する。
【背景技術】
【0002】
上記のように構成された圃場情報生成システムとして特許文献1には、収穫機としてのコンバインに対して、収穫された穀物(作物)の水分、食味、外観等の品質を計測する作物品質計測手段と、機体の現在位置を座標データとして検出するためにGPSシステムで成る位置検出装置とを備えており、作物品質計測手段による計測情報と位置検出装置と識別情報とを無線通信で送り出し、管理施設で受信し、品質マップが生成される点が記載されている。
【0003】
この特許文献1では、作物品質計測手段が、収穫した穀物を適宜サンプリングして、水分計で水分を計測し、近赤外光の吸収スペクトルを利用した分析により食味を計測し、外観品位計により外観を計測することで品質を計測するように構成されている。そして、品質と、座標データとに基づいて、1つの圃場内の座標毎の品質のバラツキを5段階に分けて評価できるように構成されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平11‐53674号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
人参や大根あるいは芋類のように圃場の地中で生育する作物を考えると、生育状態は圃場の土壌状態に影響されることが多い。具体的には、1つの圃場で人参を収穫した場合に、圃場の特定の領域で生育不良に陥ることや、耕起不足や肥料が不均一となる領域で二股の人参が収穫される現象に繋がっていた。また、圃場の特定の領域で人参に病気が発生することもあった。このような不都合に対しては、肥料や薬剤の散布、あるいは、耕起等の土壌改良により改善することが可能であり、正確な圃場情報を取得できる技術が望まれている。
【0006】
これに対して特許文献1に記載されるように品質マップに示される品位に基づいて土壌の状態を把握することも考えられるが、自脱型コンバインと普通型コンバインとの何れのコンバインであっても複数条の穀稈から穀粒を纏めて収穫し、選別処理の後に穀粒として収穫するため、品位を計測した穀粒の収穫位置を正確に特定できないものである。特に、特許文献1ではグレンタンク内部の穀粒を適宜サンプリングして品位を計測する処理が行われるため、品質マップで示される収穫場所と穀粒の品位の関係は大雑把にならざるを得ず品質マップに基づいて土壌状態を把握することは不正確になることが想像できた。
【0007】
また、これら不都合の原因を究明するために、1つの圃場の複数箇所の土壌のサンプルを採取し、分析を行うことも考えられるが、サンプルの採取に手間が掛かり、分析に時間を要する点において改善の余地がある。
【0008】
本発明の目的は、地中で生育する作物の収穫に基づいて1つの圃場の土壌の状態を正確に取得できるシステムを合理的に構成する点にある。
【課題を解決するための手段】
【0009】
本発明の特徴は、作物を収穫する収穫機に対して、この収穫機で収穫された前記作物の品質を判定する品質判定ユニットと、前記収穫機の位置情報を取得する位置情報取得ユニットとを備えている圃場情報生成システムであって、
前記収穫機が、前記作物として圃場の地中に生育する地中塊部の収穫を行う収穫部を備えて構成されると共に、前記品質判定ユニットが、収穫した前記地中塊部を撮影する撮影手段の撮影画像情報に基づいて前記地中塊部の品質を判定する処理を行い、前記収穫機により1つの圃場で収穫が行われる際に、前記品質判定ユニットで取得される前記地中塊部の品質情報と、その地中塊部が収穫されたタイミングにおいて前記位置情報取得ユニットで取得される位置情報とを取得し、この品質情報と前記位置情報とを関連付けて圃場情報を生成する関連付処理手段を備えている点にある。
【0010】
この構成によると、1つの圃場において収穫機で地中塊部を収穫した際には、収穫した地中塊部が撮影手段で撮影され、撮影画像情報に基づいて品質判定ユニットが品質を判定して品質情報を生成し、その地中塊部が収穫された圃場の位置を位置情報取得ユニットが取得し、関連付処理手段が品質情報と位置情報とを関連付けて圃場情報を生成する。これにより生成された圃場情報は、1つの圃場における収穫位置毎に品質情報が関連付けられることになり、品質情報から圃場の各部の土壌の状態を把握できる。
従って、1つの圃場の各部の土壌のサンプルを採取して分析を行う等の手間を掛けることなく、地中で生育する作物の収穫に基づいて1つの圃場の各部の土壌の状態を反映した圃場情報が生成され、この圃場情報から土壌の状態を正確に取得することが可能なシステムが構成された。
【0011】
本発明は、前記品質判定ユニットは、前記品質情報として前記地中塊部の形状情報と色濃度情報との少なくとも一方に基づく数値を生成し、前記関連付処理手段は、前記圃場において収穫された前記地中塊部の位置情報が示される位置に前記数値の表示が可能な情報構造の圃場情報を生成しても良い。
【0012】
これによると、地中塊部の形状又は色濃度に基づいて品質情報としての数値が生成されるため、この数値には地中塊部の生育状況を反映するものになり、圃場情報の数値化した品質情報から1つの圃場の各部の土壌の状態をきめ細やかに判定できる。
【0013】
本発明は、前記関連付処理手段で生成された前記圃場情報を保存するストレージを前記収穫機に備えても良い。
【0014】
これによると、関連付処理手段によって生成された圃場情報を収穫機のストレージに保存できるので、収穫機の外部において特別の処理を行うことや、保存処理を行わずに済む。そして、圃場情報の評価を行う場合には、ストレージに保存されている圃場情報を外部のコンピュータ等の装置にコピーすることや伝送するだけで済む。
【0015】
本発明は、前記地中塊部の前記品質情報と、この品質情報の前記地中塊部が収穫されたタイミングの前記位置情報とを送り出す送信ユニットが前記収穫機に備えられ、前記送信ユニットから送られた前記品質情報と前記位置情報とを関連付けて前記圃場情報を生成する前記関連付処理手段が前記収穫機から分離して配置されても良い。
【0016】
これによると、品質情報と位置情報とを送信ユニットにより収穫機の外部の関連付処理手段に送ることで、収穫機から分離して配置された関連付処理手段において圃場情報を生成することが可能となる。つまり、収穫機において関連付処理を行わないため収穫機に複雑な処理を行う装置類を備えずに済む。
【0017】
本発明は、前記収穫機が、機体の走行に伴って前記作物の茎葉部に機体後方上方に向かう搬送力を作用させて前記地中塊部を圃場から引き抜く搬送機構を備えており、この搬送機構で搬送される前記地中塊部を撮影する位置に前記撮影手段が備えられても良い。
【0018】
これによると、収穫機で収穫を行いながら撮影手段で撮影を行い品質情報を取得することが可能となり、従来からの人参ハーベスタ等に対して、撮影手段としてのカメラと、品質判定手段としての処理装置等と、GPSユニット等の位置情報取得ユニットとを備えることでシステムの主要部分を構成できる。
【図面の簡単な説明】
【0019】
【図1】人参収穫機の全体側面図である。
【図2】人参収穫機の全体平面図である。
【図3】人参収穫機の後面図である。
【図4】収穫物収容部からの人参の排出状態を示す側面図である。
【図5】搬送機構での人参の搬送形態を示す側面図である。
【図6】遮光機構とカメラと排出カッターとの配置を示す平面図である。
【図7】排出カッターと排出ガイドとの配置を示す後面図である。
【図8】システム構成を模式的に示す図である。
【図9】処理装置の制御形態を示すフローチャートである。
【図10】モニタの表示形態を示す図である。
【図11】別実施形態(a)のシステム構成を模式的に示す図である。
【発明を実施するための形態】
【0020】
以下、本発明の実施形態を図面に基づいて説明する。
〔システム構成〕
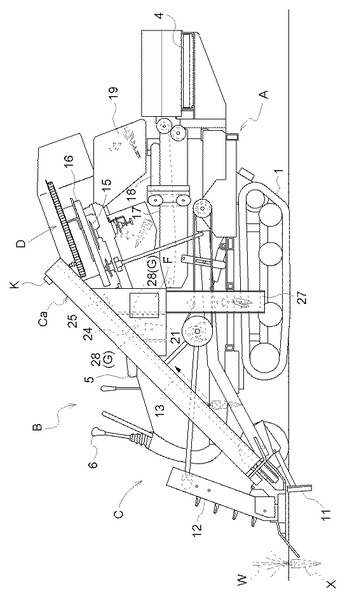
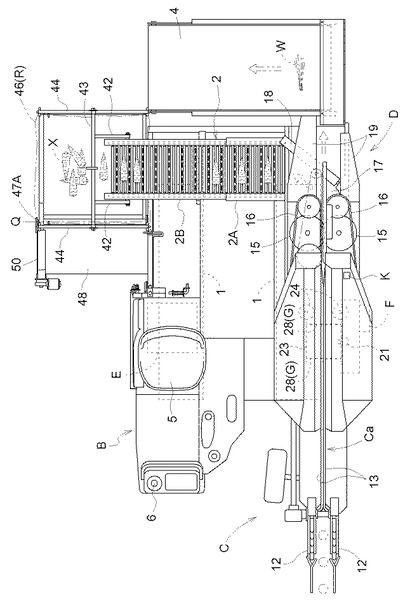
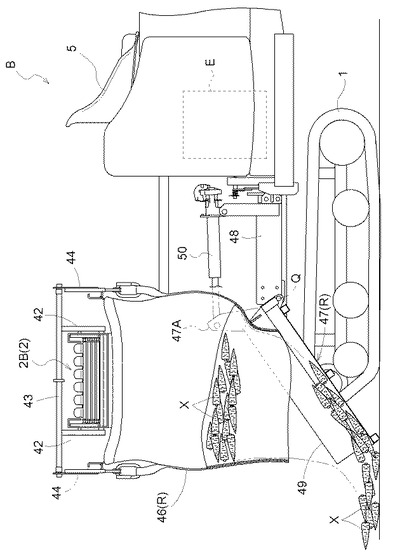
図1〜図5に示すように、左右一対のクローラ走行装置1で走行する走行機体Aの前部右側に搭乗運転部Bを配置し、走行機体Aの左側に収穫搬送部C(収穫部の一例)を配置し、この後部位置に分離部Dを配置し、この分離部Dで分離された収穫物としての人参Xを機体右方向に搬送する横搬送コンベア2を備え、この横搬送コンベア2で搬送された人参Xを貯留する収穫物収容部Rを機体右側に備え、走行機体Aの後部位置に分離部Dで分離された茎葉部Wを機体右側に落下させる形態で排出する排出コンベア4を備えて作物収穫機の一例として1条収穫用の人参収穫機が構成されている。
【0021】
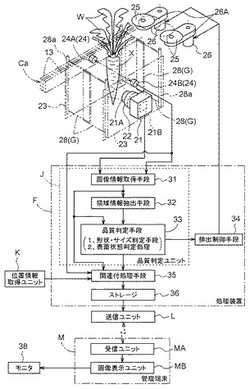
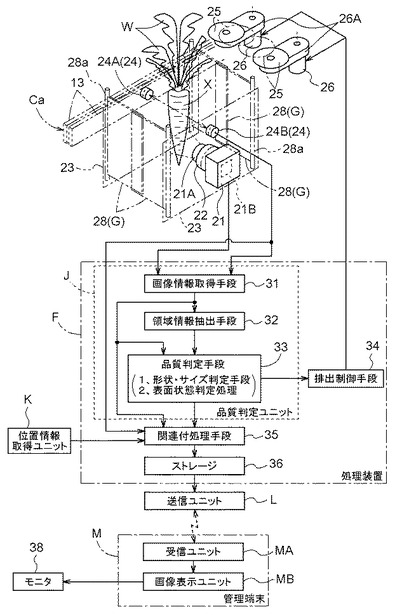
この人参収穫機には、図8に示す如く、収穫した作物としての人参Xの品質を判定する品質判定ユニットJと、前記収穫機の位置情報を取得する位置情報取得ユニットKとを備えると共に、1つの圃場で収穫が行われる際に、品質判定ユニットJで取得される人参Xの品質情報と、その人参Xが収穫されたタイミングにおいて位置情報取得ユニットKで取得される位置情報とを取得し、この品質情報と前記位置情報とを関連付けて圃場情報を生成する関連付処理手段35と、この関連付処理手段35で生成された圃場情報を保存するハードディスクやメモリ等のストレージ36とを備えている。尚、品質判定ユニットJと排出制御手段34と関連付処理手段35とストレージ36は処理装置Fの構成に含まれ、位置情報取得ユニットKは、複数の衛星からの電波を受信により走行機体Aの位置情報(経度・緯度情報)を出力するGPS型に構成されている。
【0022】
人参収穫機には圃場情報を、機体外部の管理端末Mに対して送信ユニットLから無線信号により送信することで、この無線信号を管理端末Mで受信し、この管理端末Mのモニタ38に対して圃場情報を表示して圃場の状況を把握することが可能となる。この管理端末Mは、受信ユニットMAと、汎用コンピュータで成る画像表示ユニットMBとで構成されている。
【0023】
このように人参収穫機と、この人参収穫機に備えた品質判定ユニットJと、位置情報取得ユニットKと、関連付処理手段35と、ストレージ36と、送信ユニットLとを備えると共に、管理端末Mを備えて圃場情報生成システムが構成されている。前述した処理装置F及び管理端末M等の詳細は後述する。
【0024】
このように関連付処理手段35で生成された圃場情報は、1つの圃場の各部における人参Xの品質情報をマップ状に表示可能な情報構造を有するものであり、この圃場情報から1つの圃場の各部の土壌の状態を把握が可能となる。
【0025】
本発明のシステムでは、作物のうち茎や葉を含む地上部分を茎葉部Wと称し、地中の根菜、球茎、根茎、あるいは、芋類等を含む地中部分を地中塊部と称し、この地中塊部の具体例を単に人参Xと称している。
【0026】
〔人参収穫機〕
人参収穫機では、搭乗運転部Bに運転座席5、操縦ハンドル6等を配置し、運転座席5の下側にエンジンEが配置されている。図面には示していないがエンジンEの駆動力を左右のクローラ走行装置1に伝える走行伝動系と、収穫搬送部C、分離部D等に供給する収穫伝動系とが備えられている。
【0027】
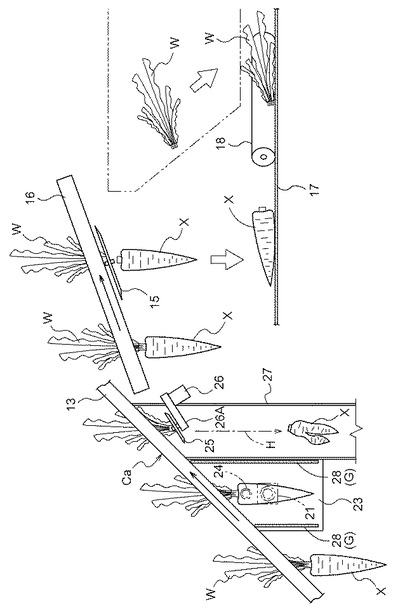
収穫搬送部Cは、作物の一例としての人参Xの引き抜き先立ち、振動により圃場を切り崩して土面を柔らかくするためのソイラ機構11を前端下側に備え、この上側に左右一対の引起装置12を備え、走行機体Aの走行に伴って茎葉部Wを左右から圧着して機体後方上方に向かう搬送力を作用させて前記作物の地中塊部としての人参Xを圃場から引き抜く左右一対の搬送ベルト13を有した搬送機構Caを備えている。
【0028】
分離部Dは、搬送機構Caの終端位置に収穫用切断機構として駆動回転型の円盤状に形成される左右の収穫カッター15と、人参Xが切り離された後の茎葉部Wを後方に搬送するための左右一対の茎葉除去ベルト16とを備えている。
【0029】
この分離部Dの下方位置には、人参Xを前部で受け止め、茎葉部Wを後部で受け止める後方搬送コンベア17を備えており、この後方搬送コンベア17の前部で搬送される人参Xを横搬送コンベア2の搬送始端位置に送り出す横送ローラ18を、この後方搬送コンベア17の搬送方向での中間位置の上面で、平面視で斜め姿勢で備えている。また、茎葉除去ベルト16から後方搬送コンベア17の後部(横送ローラ18より後方位置)に送られた茎葉部Wを排出コンベア4に送り出す案内シュート19を、この後方搬送コンベア17の後方位置に備えている。
【0030】
このような構成から、走行を行いながら、圃場において人参Xが植付られている条に収穫搬送部Cの先端位置をセットした状態で、この条に沿って走行機体Aを沿って移動させることで、このソイラ機構11の振動により土面を柔らかくし、かつ、引起装置12で茎葉部Wを引き起こし、この茎葉部Wを搬送機構Caの搬送ベルト13で挟持して機体後方上方に搬送する作動が行われる結果、人参Xを圃場から引き抜き、分離部Dにおいて収穫カッター15で茎葉部Wと人参Xとが切り離される。この後に、分離部Dから下方に落下した人参Xは後方搬送コンベア17の前端位置に落下し、横送ローラ18から横搬送コンベア2に送り出され、この横搬送コンベア2から収穫物収容部Rに収容される。また、茎葉部Wは茎葉除去ベルト16から案内シュート19を介して後方搬送コンベア17の後端側に送り出され、この後方搬送コンベア17から排出コンベア4に送り出され、この排出コンベア4により圃場面に放出される。
【0031】
〔人参収穫機−収穫物収容部〕
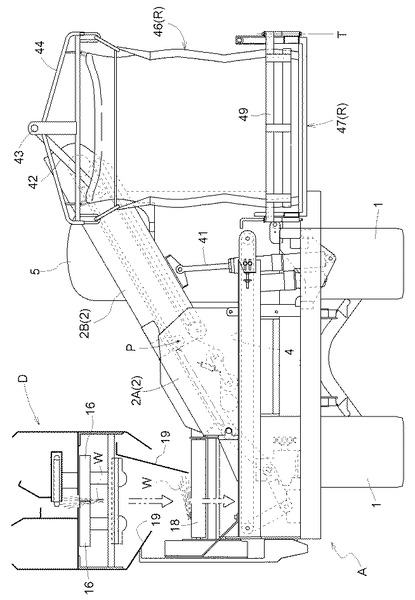
特に、この人参収穫機では、横搬送コンベア2が無端チェーンに対して多数のコンベアバーを平行姿勢で備えた構造を有し、搬送に伴いコンベアバーに載置した人参Xを斜め上方に搬送するように全体的に斜め姿勢に設定されている。また、横搬送コンベア2の搬送方向で上流側の基端部2Aに対して搬送方向で下流側の搬送終端部2Bが前後向き姿勢の屈折軸芯Pを中心にして、屈折自在に連結した構成を有しており、搬送終端部2Bの姿勢を設定する昇降シリンダ41が備えられている。更に、搬送終端部2Bの先端位置には一対の連結アーム42を介して支持軸43を備え、この支持軸43に枠状のハンガー44を備えている。
【0032】
収穫物収容部Rは、上下方向に開放する布状の柔軟な素材で角筒状に形成される側壁体46と、この側壁体46の底部の開口を閉塞する位置に配置される矩形の底壁体47とを備えており、側壁体46は、その上端の開口部分がハンガー44に対して吊り下げられる状態で支持される。
【0033】
底壁体47は、支持台48の後部位置において横向き姿勢のダンプ軸芯Qを中心にして揺動自在に支持され、この底壁体47の周囲には側壁体46の下端の開口縁からの収穫物(人参X)の漏れ出しを阻止するように側壁体46の下端部分を取り囲む下部壁体49が形成されている。この下部壁体49のうち機体後部側のものは開閉軸芯Tを中心にして開閉自在に支持されている。また、底壁体47をダンプ軸芯Qを中心にして揺動作動させる電動シリンダ50を支持台48に備え、この電動シリンダ50のピストンロッドを底壁体47のアーム部47Aに連結している。
【0034】
このような構成から、人参Xを収穫物収容部Rに収容する場合には、底壁体47を上方に揺動させて水平姿勢に維持し、収容の初期には昇降シリンダ41により横搬送コンベア2の搬送終端部2Bを下降させることで側壁体46が蛇腹状に折り畳まれる形態となり底壁体47までの落差を小さくして人参Xの傷みを抑制する状態での収容を実現する。また、収穫物収容部Rに収容される人参Xの量の増大に連係して昇降シリンダ41により搬送終端部2Bを上昇させることで側壁体46の上端が引き上げられるため収容可能な容積を増大させることが可能となる。
【0035】
次に、収穫物収容部Rから人参X(収穫物)を排出する場合には、図4に示す如く下部壁体49を開放姿勢(図示せず)に設定し、電動シリンダ50の作動により底壁体47をダンプ軸芯Qを中心にした揺動させることにより、この底壁体47の後端側を下方に向かわせる傾斜姿勢に設定して自重により人参Xが排出される。
【0036】
〔人参収穫機−選別ユニット〕
図5〜図8に示すように、本発明の人参収穫装置では、搬送機構Caで搬送される人参Xを撮像手段としてのデジタルスチル型のカメラ21で撮影し、カメラ21で撮影された撮影画像情報に基づいて処理装置Fが画像処理を行い、この画像処理の結果、人参Xが低品質であることを判定した場合には、この人参Xを茎葉部Wから切り離して下方に排出する選別ユニットを備えている。
【0037】
選別ユニットは、搬送機構Caにおける人参Xの搬送方向と直交する横方向から(搬送経路の側部位置から)撮影するカメラ21を配置している。このカメラ21は、撮像レンズ21Aを備えると共に、人参Xのカラーの撮影画像情報を取得するCCDやCMOS型等の撮像素子21Bとを備え、撮像レンズ21Aの外周を取り囲む位置には撮影用の光線を照射するためLEDを有する撮影光源22を備えている。尚、カメラ21による人参Xの撮影方向は、搬送方向と直交する方向に限るものではなく、搬送下流側の斜め下方側から見上げるように撮影方向を設定しても良い。
【0038】
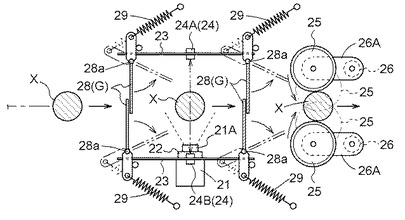
搬送機構Caの両側部のうち、カメラ21が配置される左側部位置と、撮影領域の背景となる右側部位置とに黒色の遮光壁体23が配置され、このカメラ21の撮影領域を基準にして搬送機構Caの搬送方向の上流側と下流側とに遮光機構Gが配置されている。また、撮影領域の中央の撮影位置に人参Xが達したことを検出する非接触型の位置センサ24として、一対の遮光壁体23の一方に光源24Aを備え、他方に受光センサ24Bを備えている。
【0039】
この位置センサ24は、搬送方向での上流側の遮光機構Gを人参Xが通過した後に、遮光機構Gの一対の遮光板28が閉じ姿勢に達する位置で人参Xを検出する位置に配置され、遮光板28が閉じ姿勢にあるタイミングでのカメラ21による撮影を実現する。尚、位置センサ24として搬送機構Caで搬送される人参Xに接触するセンサロッドの揺動量から人参Xを検出する接触型のものを用いても良く、撮影光源22としてストロボライトを備えても良い。
【0040】
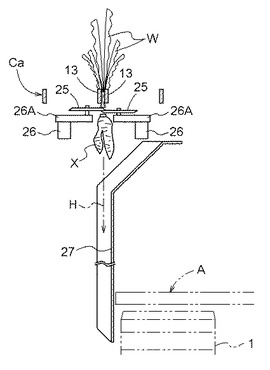
また、人参Xの撮影領域を基準にして搬送方向の下流側で、収穫カッター15より搬送方向の上流側に排出用切断機構として駆動回転型の円盤状に形成される左右の排出カッター25と、この一対の排出カッター25を切断位置まで作動させる作動装置26とを備えている。作動装置26は、左右の排出カッター25を支持する揺動型の左右の作動アーム26Aと、この作動アーム26Aを揺動させる左右の電動アクチュエータとで構成され、切断時に左右の排出カッター25を同時に搬送機構Caの搬送経路側に作動させ、非切断時には左右の排出カッター25が茎葉部Wに接触しない位置まで作動させるように電動アクチュエータで作動アーム26Aを揺動させるように構成されている。特に、排出カッター25は、搬送方向で下流側の遮光機構Gを通過した直後の人参Xの切り離しが可能な位置に配置され、カメラ21で撮影された人参Xが低品質であることが判定された場合には、遮光機構Gから送り出された直後に茎葉部Wから切り離して排出できるように構成されている。
【0041】
このように選別ユニットは、カメラ21と、遮光壁体23と、遮光機構Gと、位置センサ24と、排出カッター25と、作動装置26と処理装置Fとを備えて構成されている。
【0042】
搬送機構Caの搬送経路は、平面視において左側のクローラ走行装置1の外側に配置され、排出カッター25で茎葉部Wから切り離された人参Xが、自重によってクローラ走行装置1の外側の圃場面に落下させる位置関係となる。また、排出カッター25で茎葉部Wから切り離された人参Xを搬送経路外に案内する排出経路Hに沿って送り出す排出ガイド体27が排出カッター25の下側に配置され、これによりクローラ走行装置1で踏みつけられない圃場面に人参Xを確実に排出するように構成されている。
【0043】
遮光機構Gは、撮影領域に対して1つの人参Xが導入される間隔で配置され、この遮光機構Gは、搬送機構Caによる人参Xの搬送経路を挟む位置にゴム製で黒色の左右一対の遮光板28を縦向き姿勢の揺動支軸28aを中心にして揺動自在に支持すると共に、遮光板28を閉じ姿勢に付勢するコイル型のバネ29を備えて構成されている。この遮光機構Gでは左右の遮光板28が閉じ姿勢に達した場合に、左右の遮光板28の揺動端側同士が密着状態で重なり合うように相対的な位置関係が設定され、この重なり合う部分により外部からの光線の侵入を良好に遮断するように構成されている。このように一対の遮光板28がバネ29によって閉じ姿勢に付勢されているので、人参Xが通過した後には一対の遮光板28がバネ29の付勢力によって極めて短時間のうちに閉じ姿勢に復元して遮光を実現する。尚、バネ29として板バネやトーションバネを用いても良い。
【0044】
〔人参収穫機−処理装置〕
処理装置Fは、マイクロプロセッサやDSPのようにソフトウエア(プログラム)によって処理が実行され、ソフトウエアで成る画像情報取得手段31と、領域情報抽出手段32と、品質判定手段33と、排出制御手段34と、関連付処理手段35とを備えると共に、ハードディスクやメモリ等で構成されるストレージ36を備えている。これらのうち画像情報取得手段31と領域情報抽出手段32と品質判定手段33とで前述した品質判定ユニットJが構成されている。尚、画像情報取得手段31と領域情報抽出手段32と品質判定手段33と排出制御手段34と関連付処理手段35とはハードウエアで構成しても良く、ハードウエアとソフトウエアとの組み合わせによって構成しても良い。
【0045】
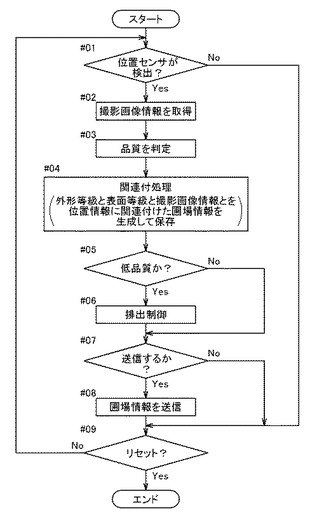
処理装置Fの制御形態の概要を図9のフローチャートに示しており、この制御形態と処理装置Fの構成の詳細と併せて以下に説明する。
【0046】
画像情報取得手段31は、位置センサ24で人参Xを検出したタイミングでカメラ21で撮影を行わせ撮影画像情報を取得する処理を行う(#01、#02ステップ)。
【0047】
この撮影画像情報の取得に続き、領域情報抽出手段32が、画像情報取得手段31で取得した画像情報の2値化処理や、輪郭抽出処理により撮影画像情報に含まれる人参Xの形状に対応する領域情報を背景から切り取る形態で抽出する処理を行い、品質判定手段33が品質の判定を行う(#03ステップ)。
【0048】
品質判定手段33は、領域情報抽出手段32で抽出された領域情報の形状とサイズとに基づく形状・サイズ判定処理により人参Xの品質の判定を行うと共に、人参Xの表面の色濃度に基づく表面状態判定処理により人参Xの品質の判定を行う。具体的には、形状・サイズ判定処理では領域情報の輪郭から人参Xの形状を抽出し、この形状が二叉である場合、欠けがある場合、閾値を越える変形があるものには、品質情報として最も小さい数値となる5段階の外形等級(s1〜s5)を与え、形状が適正な値に含まれるものについては、長さの値と太さの値とが大きいものほど品質情報として小さい数値を与える処理を行う。また、表面状態判定処理では領域情報抽出手段32で抽出された領域情報において人参特有の表面色を有するものには、品質情報として大きい数値となる表面等級(d1〜d5)を与え、人参特有の表面色と異なる色濃度で、割れや腐れ等を示す典型的な色濃度の分布が存在する場合には、品質情報として最も小さい数値を与える処理を行う。この品質判定手段33による処理は、極めて短時間にうちに行われ、カメラ21で人参Xを撮影したタイミングと品質情報(外形等級と表面等級)が生成されるタイミングとの誤差は略同時とし捉えても良い。
【0049】
また、形状・サイズ判定処理では人参Xの容積を求めることが可能であるため、人参Xの重量を推定することも可能であり、このように推定した人参Xの重量に基づいて人参Xの品質の判定を行っても良い。また、等級は5段階に限らず5段階未満でも、6段階以上であっても良い。
【0050】
GPS型に構成される位置情報取得ユニットKは、位置情報を比較的短いインターバルで関連付処理手段35に出力するように処理形態が設定され、関連付処理手段35は、品質判定手段33から品質情報(外形等級と表面等級)を取得したタイミングで、この品質情報(外形等級と表面等級)と、品質が判定された人参Xの撮影画像情報と、位置情報取得ユニットKで取得した位置情報とを関連付ける処理を行い、このように生成された圃場情報がストレージ36に保存される(#04ステップ)。
【0051】
圃場情報が生成される場合には、圃場情報を識別可能にする名称情報と収穫日時情報とが与えられる。従って、ストレージ36には複数の圃場情報が識別可能に保存されると共に、同じ圃場情報でも収穫日時が異なるものを識別可能に保存される。特に、決まった圃場において圃場情報を生成する場合に、名称情報が等しく、異なる収穫日時情報となる圃場情報がストレージ36に保存されることになり、結果として、同じ圃場の圃場情報が蓄積する状態で保存される。尚、圃場を識別する名称情報は、位置情報取得ユニットKが自動的に生成するものであっても良く、また、作業者が任意に設定するものでも良い。このように、名称情報を任意に設定した場合に、この後に同じ圃場で収穫作業を行う場合に、位置情報取得ユニットKからの位置情報に基づき、既に設定されている名称情報を検索し、検索された名称情報を自動的に設定するように処理形態を設定しても良い。
【0052】
人参収穫機では、搬送機構Caで人参Xを引き抜いてカメラ21による撮影位置まで搬送するに所定の時間を要するため、品質情報(外形等級と表面等級)が生成されたタイミング(カメラ21で撮影されたタイミングと近似)において位置情報取得ユニットKで取得される位置情報と、引き抜かれる以前の人参Xの圃場での位置とに誤差を生ずる。この誤差を補正するため、関連付処理手段35では、品質情報が生成されたタイミングを基準にして、その人参Xがカメラ21で撮影される位置まで搬送機構Caで搬送される時間だけ遡った時刻における位置情報を品質情報(外形等級と表面等級)に関連付ける処理が行われる。また、位置情報取得ユニットKが設置された位置と、人参Xが引き抜かれる位置(収穫搬送部Cの先端位置)とは、平面視的にオフセットしており、位置情報取得ユニットKで取得された位置情報は、関連付処理手段35においてオフセット量に相当する距離だけ補正される。
【0053】
前述したように外形から判断した等級も、表面の色濃度から判断した等級も小さい値のものほど良い品質を表し、大きい値のものほど品質が低いものであることを表している。従って、排出制御手段34は、品質判定手段33で与えられた外形等級と表面等級との一方でも予め設定された等級より大きい数値の等級が与えられた人参Xであると判断した場合には排出カッター25により茎葉部Wから人参Xを切り離す処理を行い、設定された等級より小さい値の等級が与えられた人参Xであると判断した場合には排出を行わない(#05、#06ステップ)。
【0054】
これにより収穫物収容部Rに収容された人参Xは、設定された等級を越える良好な品質のものだけであり、この人参Xを改めて選別する必要がない。
【0055】
次に、作業者が圃場情報を送信する必要があると判断した場合や、予め設定されたタイミングで送信を行う必要がある場合には、送信ユニットLが圃場情報を管理端末Mに送信する(#07、#08ステップ)。この処理を行うことにより、管理端末Mにおいて圃場情報をモニタ38に表示する処理が可能となる。
【0056】
そして、この処理は、作業が終了した場合のように作業者により制御を停止する操作が行われるまで継続する(#09ステップ)。
【0057】
圃場情報は、経度と緯度とで特定される位置情報(座標情報)に対して、品質情報としての外形等級(s1〜s5)と、品質情報としての表面等級(d1〜d5)と、撮影画像情報とを関連付けて保存した構造を有している。管理端末Mには、処理装置Fのストレージ36と同様に圃場情報を保存するハードディスクやメモリ等の記憶手段(図示せず)を備えており、この記憶手段には、複数の圃場情報と、同じ圃場でも異なる収穫日時となる圃場情報とが識別可能に保存される。
【0058】
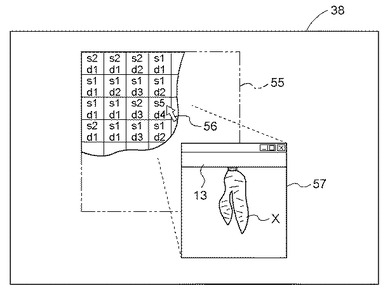
この圃場情報をモニタ38に表示するためのビューワが画像表示ユニットMBにインストールされ、このビューワで圃場情報をモニタ38に表示する場合には、圃場情報の名称情報と収穫日時を指定することで、図10に示すように、指定された圃場情報に基づいてビューワが圃場イメージ55を表示すると共に、圃場イメージ55に経度と緯度とで座標が特定される複数の位置に外形等級(s1〜s5)と表面等級(d1〜d5)とを数値で表示する。また、ビューワは、画面上で特定の位置をカーソル56で選択してクリック等の操作が行われた場合には、モニタ38に新たにウインドウ57を開き、このウインドウ57に対して選択された位置で収穫された人参Xの撮影画像情報を表示する。
【0059】
画像表示ユニットMBでモニタ38に圃場情報を表示する場合に、図10に示すように座標位置毎に品質情報を数値だけで表示するものに加えて、5段階の数値に対応した色相や色濃度を設定しておき、座標位置に部位に数値に対応した色表示を行うようにビューワによる表示形態を設定しても良い。また、圃場を3D表示すると共に、例えば、5段階の数値に対応して数値が小さいほど(高品質であるほど)バーグラフを高く表示する形態で圃場情報を表示するようにビューワによる表示形態を設定しても良い。
【0060】
また、管理端末Mでは複数の圃場情報のいずれか1つの名称情報を指定し、複数の収穫日時を指定してモニタ38に表示することも可能であり、このように収穫日時が異なる圃場情報を表示することにより、特定の圃場における品質の変化の傾向や、収量の変化の傾向をグラフ化して表示させるようにビューワの表示形態を設定しても良い。
【0061】
〔実施形態の作用・効果〕
このような構成から、搬送機構Caの搬送により圃場から引き抜かれた人参Xは、左右の遮光壁体23と前後の遮光機構Gとで取り囲まれる空間となる撮影領域に導入され、位置センサ24で検出されたタイミングでカメラ21により撮影される。撮影領域には1つの人参Xだけが導入され、撮影時には外部からの不要な光線が遮断されるので撮影光源22からの光線の照射のみによって1つの人参Xの撮影画像が取得される。処理装置Fでは、撮影画像情報に外部の構成が含まれず、1つの人参Xだけを撮影しているため等級を判定する処理(品質を判定する処理)を行う場合に不正確な判定に繋がる不都合を回避して、品質の判定を正確に行える。
【0062】
特に、遮光機構Gは、搬送機構Caの搬送方向で撮影領域の上流側と下流側と配置される2枚の遮光板28で構成され、人参Xが当接することにより揺動支軸28aを中心にして揺動することで開放して人参Xの通過を許し、通過の後にはバネ29の付勢力により即座に遮光板28の揺動端部が重なり合う閉じ姿勢に達し、この閉じ姿勢では光線の侵入を阻止するため良好な遮光を行う。更に、遮光板28が人参Xに当接する際に、この遮光板28が人参Xに付着している土を取り去ると共に、遮光板28との当接により人参Xの揺れを抑制する。これにより、表面の土が取り去られ、揺れが抑制された人参Xをカメラ21で撮影して品質の判定の精度の向上が実現する。
【0063】
カメラ21で撮影された撮影画像情報に基づいて処理装置Fの品質判定ユニットJでは品質情報として人参Xの外形等級と表面等級とを判定し、その人参Xを収穫した位置情報が位置情報取得ユニットKから取得され、この品質情報と位置情報とが関連付処理手段35により関連付けられ圃場情報が生成される。また、品質情報から低い品質と判定された人参Xは排出カッター25により茎葉部Wから切り離され、排出経路Hに沿って落下する形態で圃場面に排出される。これにより、例えば、商品価値のない人参Xが収穫物収容部Rに収容される構成と比較すると、収穫物収容部Rが満杯になるまでの時間を長くすることが可能となるだけではなく、不要な人参Xを運搬することがなく、走行機体Aを走行させるエネルギーを無駄に消費することがない。また、低品質であることが判定された人参Xは、搬送方向で下流側の遮光機構Gを通過した直後に排出カッター25により茎葉部Wから切り離され排出されるので、この切り離しの対象となる人参Xの特定に誤りがなく、搬送機構Caの搬送経路で無駄に搬送することなく早期の排出が実現する。
【0064】
圃場情報は走行機体Aのストレージ36に保存され、送信ユニットLにより管理端末Mに送信され、この管理端末Mのモニタ38に表示することが可能となり、この表示に基づいて圃場の土壌の状態を数値で認識できることになる。特に、モニタ38に表示された圃場イメージ55において、生育不良となる位置の状態を確認する場合には、その位置をカーソル56で選択してクリック等の操作により、その位置で収穫された人参Xの撮影画像情報が、新たに開かれたウインドウ57に表示されるため、生育不良の状況を視覚により確認して、生育不良の原因の判断を容易にする。
【0065】
また、圃場情報をモニタ38に表示する形態として、品質情報を色濃度として表示した場合や、バーブラフ的に表示した場合には、この表示から圃場情報から肥料が不足している範囲や、病気や害虫が発生している範囲を判定し、また、低品質の人参Xの発生率を把握して正確な対応を容易に行える。
【0066】
この圃場情報は、品質に基づいて圃場各部の土壌の状態の判定を実現し得るものであり、施肥や薬剤を散布位置の特定や、水捌けの向上を図る位置の特定や、新たな土壌の入れ換えを行う位置の特定を行う際の目安となり、土壌の改良により収穫される人参Xの品質向上を可能にする。従って、この圃場情報に基づいて、施肥装置による肥料の散布や、薬剤散布装置による薬剤の散布や、土壌の入れ換え等の作業を効率的に行い、その結果として高品質の人参の収穫や、収量の増大に結び付けることを可能にする。
【0067】
更に、圃場情報は、人参収穫機のストレージ36と管理端末Mの記憶手段との何れにも蓄積して保存できるため、圃場情報の名称情報と、複数の収穫時期の情報とを指定し、異なる収穫時期の圃場情報に基づいて圃場の領域毎における人参Xの品質の変動や、収穫量の変動をグラフ化してモニタ38に表示する等の処理により、圃場の状態を把握することも可能となる。同じ圃場について異なる収穫時期の圃場情報に基づいて領域毎における人参Xの品質の変動や、収穫量の変動を表示させた場合には、翌年等の将来の圃場の状況を推定することも高精度で行え、この推定により施肥の時期や、耕起の時期、あるいは、薬剤による殺菌・消毒の時期を設定して良好な品質の人参Xを収量の増大に繋げることを可能にする。また、1つの圃場において薬剤や肥料の散布の履歴として利用することも可能となる。
【0068】
圃場情報に天候や、出荷時期や、市況(人参Xの価格)を併せて保存も良く、この圃場情報を蓄積しておくことにより、蓄積した圃場情報から天候と人参Xの価格を推定することも可能となり、適切な収穫時期を設定して高価格で人参Xを出荷することも可能となる。
【0069】
〔別実施形態〕
本発明は、上記した実施形態以外に以下のように構成しても良い。
【0070】
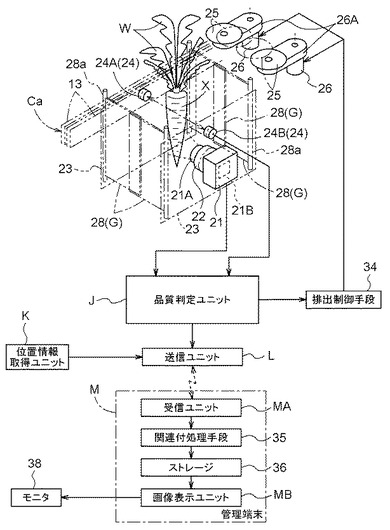
(a)図11に示すように、走行機体Aに関連付処理手段35を備えずに、品質判定ユニットJと位置情報取得ユニットKを備え、品質判定ユニットJで生成される品質情報と、位置情報取得ユニットKで取得される位置情報とを送信ユニットLにより逐次送信し、この情報を受信ユニットMAで受信する管理端末Mに関連付処理手段35を備えて圃場情報生成システムを構成する。このように構成したものであっても、圃場情報を生成して圃場の土壌の状況を的確に把握できる。
【0071】
(b)走行機体Aに品質判定ユニットJと位置情報取得ユニットKと関連付処理手段35とストレージ36とを備えると共に、無線式に圃場情報を送信する送信ユニットLに構成に代えて、例えば、USBメモリ等の記憶媒体に圃場情報を保存するための媒体ドライブ等を走行機体Aに備え、媒体ドライブに記憶媒体をセットして圃場情報を記憶媒体にコピーする形態で記憶し、記憶した圃場情報を管理端末Mにロードしてモニタ38に表示するように圃場情報生成システムを構成する。このように記憶媒体に圃場情報を保存できるように構成したものでは、記憶媒体に記憶した圃場情報をパーソナルコンピュータにロードすることも可能となり、管理端末Mにおいて圃場の管理を容易に行える。
【0072】
(c)前述した別実施形態(b)の変形例として、ストレージ36に保存されている圃場情報を管理端末Mに対してUSBケーブル等により伝送可能な伝送ユニットを備える。このように伝送ユニットを備えてものでは、別実施形態(b)と同様にUSBケーブル等で圃場情報をパーソナルコンピュータに伝送することも可能となり、管理端末Mにおいて圃場の管理を容易に行える。
【0073】
(d)実施形態に記載した圃場情報は、経度と緯度とに品質情報を関連付けた絶対座標系(測地座標系)となる位置情報を有するものであるが、この圃場情報として、圃場の特定位置を基準とした座標に品質情報を関連付けた相対座標系となる位置情報を用いても良い。このような圃場情報を用いるものでも、圃場情報に基づいて圃場の管理が可能となる。
【0074】
(e)撮影手段として動画を撮影するデジタルムービーカメラを備えることで複数コマとなる撮影画像情報を取得するように構成する。このように複数コマの撮影画像情報を取得する構成では、複数のコマの撮影画像情報から最も良好に撮影された撮影画像情報に基づいて品質の判定を行うことや、複数のコマの撮影画像情報を合成したものに基づいて品質の判定が可能となり、判定精度を高めることが可能となる。
【0075】
(f)撮影手段として、地中塊部(人参X)を異なる方向から撮影する複数のカメラ21を備える。このカメラ21は、別実施形態(c)のようにデジタルムービーカメラであっても良い。このように複数のカメラ21で地中塊部(人参X)を撮影することで、例えば、地中塊部(人参X)の立体形状を把握して、品質の判定の精度を高めることが可能となる。
【0076】
(g)作物として、人参Xのほか、大根、牛蒡、玉葱、芋類等の地中で成長するものを収穫対象としても良い。
【産業上の利用可能性】
【0077】
本発明は、作物の茎葉部Wに搬送力を作用させて地中塊部を引き抜く形態で収穫を行う作物収穫機に利用することができる。
【符号の説明】
【0078】
21 撮影手段(カメラ)
35 関連付処理手段
36 ストレージ
A 機体(走行機体)
C 収穫部(収穫搬送部)
Ca 搬送機構
J 品質判定ユニット
K 位置情報取得ユニット
L 送信ユニット
W 茎葉部
X 地中塊部(人参)
【技術分野】
【0001】
本発明は、作物を収穫する収穫機に対して、この収穫機で収穫された前記作物の品質を判定する品質判定ユニットと、前記収穫機の位置情報を取得する位置情報取得ユニットとを備えている圃場情報生成システムに関する。
【背景技術】
【0002】
上記のように構成された圃場情報生成システムとして特許文献1には、収穫機としてのコンバインに対して、収穫された穀物(作物)の水分、食味、外観等の品質を計測する作物品質計測手段と、機体の現在位置を座標データとして検出するためにGPSシステムで成る位置検出装置とを備えており、作物品質計測手段による計測情報と位置検出装置と識別情報とを無線通信で送り出し、管理施設で受信し、品質マップが生成される点が記載されている。
【0003】
この特許文献1では、作物品質計測手段が、収穫した穀物を適宜サンプリングして、水分計で水分を計測し、近赤外光の吸収スペクトルを利用した分析により食味を計測し、外観品位計により外観を計測することで品質を計測するように構成されている。そして、品質と、座標データとに基づいて、1つの圃場内の座標毎の品質のバラツキを5段階に分けて評価できるように構成されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平11‐53674号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
人参や大根あるいは芋類のように圃場の地中で生育する作物を考えると、生育状態は圃場の土壌状態に影響されることが多い。具体的には、1つの圃場で人参を収穫した場合に、圃場の特定の領域で生育不良に陥ることや、耕起不足や肥料が不均一となる領域で二股の人参が収穫される現象に繋がっていた。また、圃場の特定の領域で人参に病気が発生することもあった。このような不都合に対しては、肥料や薬剤の散布、あるいは、耕起等の土壌改良により改善することが可能であり、正確な圃場情報を取得できる技術が望まれている。
【0006】
これに対して特許文献1に記載されるように品質マップに示される品位に基づいて土壌の状態を把握することも考えられるが、自脱型コンバインと普通型コンバインとの何れのコンバインであっても複数条の穀稈から穀粒を纏めて収穫し、選別処理の後に穀粒として収穫するため、品位を計測した穀粒の収穫位置を正確に特定できないものである。特に、特許文献1ではグレンタンク内部の穀粒を適宜サンプリングして品位を計測する処理が行われるため、品質マップで示される収穫場所と穀粒の品位の関係は大雑把にならざるを得ず品質マップに基づいて土壌状態を把握することは不正確になることが想像できた。
【0007】
また、これら不都合の原因を究明するために、1つの圃場の複数箇所の土壌のサンプルを採取し、分析を行うことも考えられるが、サンプルの採取に手間が掛かり、分析に時間を要する点において改善の余地がある。
【0008】
本発明の目的は、地中で生育する作物の収穫に基づいて1つの圃場の土壌の状態を正確に取得できるシステムを合理的に構成する点にある。
【課題を解決するための手段】
【0009】
本発明の特徴は、作物を収穫する収穫機に対して、この収穫機で収穫された前記作物の品質を判定する品質判定ユニットと、前記収穫機の位置情報を取得する位置情報取得ユニットとを備えている圃場情報生成システムであって、
前記収穫機が、前記作物として圃場の地中に生育する地中塊部の収穫を行う収穫部を備えて構成されると共に、前記品質判定ユニットが、収穫した前記地中塊部を撮影する撮影手段の撮影画像情報に基づいて前記地中塊部の品質を判定する処理を行い、前記収穫機により1つの圃場で収穫が行われる際に、前記品質判定ユニットで取得される前記地中塊部の品質情報と、その地中塊部が収穫されたタイミングにおいて前記位置情報取得ユニットで取得される位置情報とを取得し、この品質情報と前記位置情報とを関連付けて圃場情報を生成する関連付処理手段を備えている点にある。
【0010】
この構成によると、1つの圃場において収穫機で地中塊部を収穫した際には、収穫した地中塊部が撮影手段で撮影され、撮影画像情報に基づいて品質判定ユニットが品質を判定して品質情報を生成し、その地中塊部が収穫された圃場の位置を位置情報取得ユニットが取得し、関連付処理手段が品質情報と位置情報とを関連付けて圃場情報を生成する。これにより生成された圃場情報は、1つの圃場における収穫位置毎に品質情報が関連付けられることになり、品質情報から圃場の各部の土壌の状態を把握できる。
従って、1つの圃場の各部の土壌のサンプルを採取して分析を行う等の手間を掛けることなく、地中で生育する作物の収穫に基づいて1つの圃場の各部の土壌の状態を反映した圃場情報が生成され、この圃場情報から土壌の状態を正確に取得することが可能なシステムが構成された。
【0011】
本発明は、前記品質判定ユニットは、前記品質情報として前記地中塊部の形状情報と色濃度情報との少なくとも一方に基づく数値を生成し、前記関連付処理手段は、前記圃場において収穫された前記地中塊部の位置情報が示される位置に前記数値の表示が可能な情報構造の圃場情報を生成しても良い。
【0012】
これによると、地中塊部の形状又は色濃度に基づいて品質情報としての数値が生成されるため、この数値には地中塊部の生育状況を反映するものになり、圃場情報の数値化した品質情報から1つの圃場の各部の土壌の状態をきめ細やかに判定できる。
【0013】
本発明は、前記関連付処理手段で生成された前記圃場情報を保存するストレージを前記収穫機に備えても良い。
【0014】
これによると、関連付処理手段によって生成された圃場情報を収穫機のストレージに保存できるので、収穫機の外部において特別の処理を行うことや、保存処理を行わずに済む。そして、圃場情報の評価を行う場合には、ストレージに保存されている圃場情報を外部のコンピュータ等の装置にコピーすることや伝送するだけで済む。
【0015】
本発明は、前記地中塊部の前記品質情報と、この品質情報の前記地中塊部が収穫されたタイミングの前記位置情報とを送り出す送信ユニットが前記収穫機に備えられ、前記送信ユニットから送られた前記品質情報と前記位置情報とを関連付けて前記圃場情報を生成する前記関連付処理手段が前記収穫機から分離して配置されても良い。
【0016】
これによると、品質情報と位置情報とを送信ユニットにより収穫機の外部の関連付処理手段に送ることで、収穫機から分離して配置された関連付処理手段において圃場情報を生成することが可能となる。つまり、収穫機において関連付処理を行わないため収穫機に複雑な処理を行う装置類を備えずに済む。
【0017】
本発明は、前記収穫機が、機体の走行に伴って前記作物の茎葉部に機体後方上方に向かう搬送力を作用させて前記地中塊部を圃場から引き抜く搬送機構を備えており、この搬送機構で搬送される前記地中塊部を撮影する位置に前記撮影手段が備えられても良い。
【0018】
これによると、収穫機で収穫を行いながら撮影手段で撮影を行い品質情報を取得することが可能となり、従来からの人参ハーベスタ等に対して、撮影手段としてのカメラと、品質判定手段としての処理装置等と、GPSユニット等の位置情報取得ユニットとを備えることでシステムの主要部分を構成できる。
【図面の簡単な説明】
【0019】
【図1】人参収穫機の全体側面図である。
【図2】人参収穫機の全体平面図である。
【図3】人参収穫機の後面図である。
【図4】収穫物収容部からの人参の排出状態を示す側面図である。
【図5】搬送機構での人参の搬送形態を示す側面図である。
【図6】遮光機構とカメラと排出カッターとの配置を示す平面図である。
【図7】排出カッターと排出ガイドとの配置を示す後面図である。
【図8】システム構成を模式的に示す図である。
【図9】処理装置の制御形態を示すフローチャートである。
【図10】モニタの表示形態を示す図である。
【図11】別実施形態(a)のシステム構成を模式的に示す図である。
【発明を実施するための形態】
【0020】
以下、本発明の実施形態を図面に基づいて説明する。
〔システム構成〕
図1〜図5に示すように、左右一対のクローラ走行装置1で走行する走行機体Aの前部右側に搭乗運転部Bを配置し、走行機体Aの左側に収穫搬送部C(収穫部の一例)を配置し、この後部位置に分離部Dを配置し、この分離部Dで分離された収穫物としての人参Xを機体右方向に搬送する横搬送コンベア2を備え、この横搬送コンベア2で搬送された人参Xを貯留する収穫物収容部Rを機体右側に備え、走行機体Aの後部位置に分離部Dで分離された茎葉部Wを機体右側に落下させる形態で排出する排出コンベア4を備えて作物収穫機の一例として1条収穫用の人参収穫機が構成されている。
【0021】
この人参収穫機には、図8に示す如く、収穫した作物としての人参Xの品質を判定する品質判定ユニットJと、前記収穫機の位置情報を取得する位置情報取得ユニットKとを備えると共に、1つの圃場で収穫が行われる際に、品質判定ユニットJで取得される人参Xの品質情報と、その人参Xが収穫されたタイミングにおいて位置情報取得ユニットKで取得される位置情報とを取得し、この品質情報と前記位置情報とを関連付けて圃場情報を生成する関連付処理手段35と、この関連付処理手段35で生成された圃場情報を保存するハードディスクやメモリ等のストレージ36とを備えている。尚、品質判定ユニットJと排出制御手段34と関連付処理手段35とストレージ36は処理装置Fの構成に含まれ、位置情報取得ユニットKは、複数の衛星からの電波を受信により走行機体Aの位置情報(経度・緯度情報)を出力するGPS型に構成されている。
【0022】
人参収穫機には圃場情報を、機体外部の管理端末Mに対して送信ユニットLから無線信号により送信することで、この無線信号を管理端末Mで受信し、この管理端末Mのモニタ38に対して圃場情報を表示して圃場の状況を把握することが可能となる。この管理端末Mは、受信ユニットMAと、汎用コンピュータで成る画像表示ユニットMBとで構成されている。
【0023】
このように人参収穫機と、この人参収穫機に備えた品質判定ユニットJと、位置情報取得ユニットKと、関連付処理手段35と、ストレージ36と、送信ユニットLとを備えると共に、管理端末Mを備えて圃場情報生成システムが構成されている。前述した処理装置F及び管理端末M等の詳細は後述する。
【0024】
このように関連付処理手段35で生成された圃場情報は、1つの圃場の各部における人参Xの品質情報をマップ状に表示可能な情報構造を有するものであり、この圃場情報から1つの圃場の各部の土壌の状態を把握が可能となる。
【0025】
本発明のシステムでは、作物のうち茎や葉を含む地上部分を茎葉部Wと称し、地中の根菜、球茎、根茎、あるいは、芋類等を含む地中部分を地中塊部と称し、この地中塊部の具体例を単に人参Xと称している。
【0026】
〔人参収穫機〕
人参収穫機では、搭乗運転部Bに運転座席5、操縦ハンドル6等を配置し、運転座席5の下側にエンジンEが配置されている。図面には示していないがエンジンEの駆動力を左右のクローラ走行装置1に伝える走行伝動系と、収穫搬送部C、分離部D等に供給する収穫伝動系とが備えられている。
【0027】
収穫搬送部Cは、作物の一例としての人参Xの引き抜き先立ち、振動により圃場を切り崩して土面を柔らかくするためのソイラ機構11を前端下側に備え、この上側に左右一対の引起装置12を備え、走行機体Aの走行に伴って茎葉部Wを左右から圧着して機体後方上方に向かう搬送力を作用させて前記作物の地中塊部としての人参Xを圃場から引き抜く左右一対の搬送ベルト13を有した搬送機構Caを備えている。
【0028】
分離部Dは、搬送機構Caの終端位置に収穫用切断機構として駆動回転型の円盤状に形成される左右の収穫カッター15と、人参Xが切り離された後の茎葉部Wを後方に搬送するための左右一対の茎葉除去ベルト16とを備えている。
【0029】
この分離部Dの下方位置には、人参Xを前部で受け止め、茎葉部Wを後部で受け止める後方搬送コンベア17を備えており、この後方搬送コンベア17の前部で搬送される人参Xを横搬送コンベア2の搬送始端位置に送り出す横送ローラ18を、この後方搬送コンベア17の搬送方向での中間位置の上面で、平面視で斜め姿勢で備えている。また、茎葉除去ベルト16から後方搬送コンベア17の後部(横送ローラ18より後方位置)に送られた茎葉部Wを排出コンベア4に送り出す案内シュート19を、この後方搬送コンベア17の後方位置に備えている。
【0030】
このような構成から、走行を行いながら、圃場において人参Xが植付られている条に収穫搬送部Cの先端位置をセットした状態で、この条に沿って走行機体Aを沿って移動させることで、このソイラ機構11の振動により土面を柔らかくし、かつ、引起装置12で茎葉部Wを引き起こし、この茎葉部Wを搬送機構Caの搬送ベルト13で挟持して機体後方上方に搬送する作動が行われる結果、人参Xを圃場から引き抜き、分離部Dにおいて収穫カッター15で茎葉部Wと人参Xとが切り離される。この後に、分離部Dから下方に落下した人参Xは後方搬送コンベア17の前端位置に落下し、横送ローラ18から横搬送コンベア2に送り出され、この横搬送コンベア2から収穫物収容部Rに収容される。また、茎葉部Wは茎葉除去ベルト16から案内シュート19を介して後方搬送コンベア17の後端側に送り出され、この後方搬送コンベア17から排出コンベア4に送り出され、この排出コンベア4により圃場面に放出される。
【0031】
〔人参収穫機−収穫物収容部〕
特に、この人参収穫機では、横搬送コンベア2が無端チェーンに対して多数のコンベアバーを平行姿勢で備えた構造を有し、搬送に伴いコンベアバーに載置した人参Xを斜め上方に搬送するように全体的に斜め姿勢に設定されている。また、横搬送コンベア2の搬送方向で上流側の基端部2Aに対して搬送方向で下流側の搬送終端部2Bが前後向き姿勢の屈折軸芯Pを中心にして、屈折自在に連結した構成を有しており、搬送終端部2Bの姿勢を設定する昇降シリンダ41が備えられている。更に、搬送終端部2Bの先端位置には一対の連結アーム42を介して支持軸43を備え、この支持軸43に枠状のハンガー44を備えている。
【0032】
収穫物収容部Rは、上下方向に開放する布状の柔軟な素材で角筒状に形成される側壁体46と、この側壁体46の底部の開口を閉塞する位置に配置される矩形の底壁体47とを備えており、側壁体46は、その上端の開口部分がハンガー44に対して吊り下げられる状態で支持される。
【0033】
底壁体47は、支持台48の後部位置において横向き姿勢のダンプ軸芯Qを中心にして揺動自在に支持され、この底壁体47の周囲には側壁体46の下端の開口縁からの収穫物(人参X)の漏れ出しを阻止するように側壁体46の下端部分を取り囲む下部壁体49が形成されている。この下部壁体49のうち機体後部側のものは開閉軸芯Tを中心にして開閉自在に支持されている。また、底壁体47をダンプ軸芯Qを中心にして揺動作動させる電動シリンダ50を支持台48に備え、この電動シリンダ50のピストンロッドを底壁体47のアーム部47Aに連結している。
【0034】
このような構成から、人参Xを収穫物収容部Rに収容する場合には、底壁体47を上方に揺動させて水平姿勢に維持し、収容の初期には昇降シリンダ41により横搬送コンベア2の搬送終端部2Bを下降させることで側壁体46が蛇腹状に折り畳まれる形態となり底壁体47までの落差を小さくして人参Xの傷みを抑制する状態での収容を実現する。また、収穫物収容部Rに収容される人参Xの量の増大に連係して昇降シリンダ41により搬送終端部2Bを上昇させることで側壁体46の上端が引き上げられるため収容可能な容積を増大させることが可能となる。
【0035】
次に、収穫物収容部Rから人参X(収穫物)を排出する場合には、図4に示す如く下部壁体49を開放姿勢(図示せず)に設定し、電動シリンダ50の作動により底壁体47をダンプ軸芯Qを中心にした揺動させることにより、この底壁体47の後端側を下方に向かわせる傾斜姿勢に設定して自重により人参Xが排出される。
【0036】
〔人参収穫機−選別ユニット〕
図5〜図8に示すように、本発明の人参収穫装置では、搬送機構Caで搬送される人参Xを撮像手段としてのデジタルスチル型のカメラ21で撮影し、カメラ21で撮影された撮影画像情報に基づいて処理装置Fが画像処理を行い、この画像処理の結果、人参Xが低品質であることを判定した場合には、この人参Xを茎葉部Wから切り離して下方に排出する選別ユニットを備えている。
【0037】
選別ユニットは、搬送機構Caにおける人参Xの搬送方向と直交する横方向から(搬送経路の側部位置から)撮影するカメラ21を配置している。このカメラ21は、撮像レンズ21Aを備えると共に、人参Xのカラーの撮影画像情報を取得するCCDやCMOS型等の撮像素子21Bとを備え、撮像レンズ21Aの外周を取り囲む位置には撮影用の光線を照射するためLEDを有する撮影光源22を備えている。尚、カメラ21による人参Xの撮影方向は、搬送方向と直交する方向に限るものではなく、搬送下流側の斜め下方側から見上げるように撮影方向を設定しても良い。
【0038】
搬送機構Caの両側部のうち、カメラ21が配置される左側部位置と、撮影領域の背景となる右側部位置とに黒色の遮光壁体23が配置され、このカメラ21の撮影領域を基準にして搬送機構Caの搬送方向の上流側と下流側とに遮光機構Gが配置されている。また、撮影領域の中央の撮影位置に人参Xが達したことを検出する非接触型の位置センサ24として、一対の遮光壁体23の一方に光源24Aを備え、他方に受光センサ24Bを備えている。
【0039】
この位置センサ24は、搬送方向での上流側の遮光機構Gを人参Xが通過した後に、遮光機構Gの一対の遮光板28が閉じ姿勢に達する位置で人参Xを検出する位置に配置され、遮光板28が閉じ姿勢にあるタイミングでのカメラ21による撮影を実現する。尚、位置センサ24として搬送機構Caで搬送される人参Xに接触するセンサロッドの揺動量から人参Xを検出する接触型のものを用いても良く、撮影光源22としてストロボライトを備えても良い。
【0040】
また、人参Xの撮影領域を基準にして搬送方向の下流側で、収穫カッター15より搬送方向の上流側に排出用切断機構として駆動回転型の円盤状に形成される左右の排出カッター25と、この一対の排出カッター25を切断位置まで作動させる作動装置26とを備えている。作動装置26は、左右の排出カッター25を支持する揺動型の左右の作動アーム26Aと、この作動アーム26Aを揺動させる左右の電動アクチュエータとで構成され、切断時に左右の排出カッター25を同時に搬送機構Caの搬送経路側に作動させ、非切断時には左右の排出カッター25が茎葉部Wに接触しない位置まで作動させるように電動アクチュエータで作動アーム26Aを揺動させるように構成されている。特に、排出カッター25は、搬送方向で下流側の遮光機構Gを通過した直後の人参Xの切り離しが可能な位置に配置され、カメラ21で撮影された人参Xが低品質であることが判定された場合には、遮光機構Gから送り出された直後に茎葉部Wから切り離して排出できるように構成されている。
【0041】
このように選別ユニットは、カメラ21と、遮光壁体23と、遮光機構Gと、位置センサ24と、排出カッター25と、作動装置26と処理装置Fとを備えて構成されている。
【0042】
搬送機構Caの搬送経路は、平面視において左側のクローラ走行装置1の外側に配置され、排出カッター25で茎葉部Wから切り離された人参Xが、自重によってクローラ走行装置1の外側の圃場面に落下させる位置関係となる。また、排出カッター25で茎葉部Wから切り離された人参Xを搬送経路外に案内する排出経路Hに沿って送り出す排出ガイド体27が排出カッター25の下側に配置され、これによりクローラ走行装置1で踏みつけられない圃場面に人参Xを確実に排出するように構成されている。
【0043】
遮光機構Gは、撮影領域に対して1つの人参Xが導入される間隔で配置され、この遮光機構Gは、搬送機構Caによる人参Xの搬送経路を挟む位置にゴム製で黒色の左右一対の遮光板28を縦向き姿勢の揺動支軸28aを中心にして揺動自在に支持すると共に、遮光板28を閉じ姿勢に付勢するコイル型のバネ29を備えて構成されている。この遮光機構Gでは左右の遮光板28が閉じ姿勢に達した場合に、左右の遮光板28の揺動端側同士が密着状態で重なり合うように相対的な位置関係が設定され、この重なり合う部分により外部からの光線の侵入を良好に遮断するように構成されている。このように一対の遮光板28がバネ29によって閉じ姿勢に付勢されているので、人参Xが通過した後には一対の遮光板28がバネ29の付勢力によって極めて短時間のうちに閉じ姿勢に復元して遮光を実現する。尚、バネ29として板バネやトーションバネを用いても良い。
【0044】
〔人参収穫機−処理装置〕
処理装置Fは、マイクロプロセッサやDSPのようにソフトウエア(プログラム)によって処理が実行され、ソフトウエアで成る画像情報取得手段31と、領域情報抽出手段32と、品質判定手段33と、排出制御手段34と、関連付処理手段35とを備えると共に、ハードディスクやメモリ等で構成されるストレージ36を備えている。これらのうち画像情報取得手段31と領域情報抽出手段32と品質判定手段33とで前述した品質判定ユニットJが構成されている。尚、画像情報取得手段31と領域情報抽出手段32と品質判定手段33と排出制御手段34と関連付処理手段35とはハードウエアで構成しても良く、ハードウエアとソフトウエアとの組み合わせによって構成しても良い。
【0045】
処理装置Fの制御形態の概要を図9のフローチャートに示しており、この制御形態と処理装置Fの構成の詳細と併せて以下に説明する。
【0046】
画像情報取得手段31は、位置センサ24で人参Xを検出したタイミングでカメラ21で撮影を行わせ撮影画像情報を取得する処理を行う(#01、#02ステップ)。
【0047】
この撮影画像情報の取得に続き、領域情報抽出手段32が、画像情報取得手段31で取得した画像情報の2値化処理や、輪郭抽出処理により撮影画像情報に含まれる人参Xの形状に対応する領域情報を背景から切り取る形態で抽出する処理を行い、品質判定手段33が品質の判定を行う(#03ステップ)。
【0048】
品質判定手段33は、領域情報抽出手段32で抽出された領域情報の形状とサイズとに基づく形状・サイズ判定処理により人参Xの品質の判定を行うと共に、人参Xの表面の色濃度に基づく表面状態判定処理により人参Xの品質の判定を行う。具体的には、形状・サイズ判定処理では領域情報の輪郭から人参Xの形状を抽出し、この形状が二叉である場合、欠けがある場合、閾値を越える変形があるものには、品質情報として最も小さい数値となる5段階の外形等級(s1〜s5)を与え、形状が適正な値に含まれるものについては、長さの値と太さの値とが大きいものほど品質情報として小さい数値を与える処理を行う。また、表面状態判定処理では領域情報抽出手段32で抽出された領域情報において人参特有の表面色を有するものには、品質情報として大きい数値となる表面等級(d1〜d5)を与え、人参特有の表面色と異なる色濃度で、割れや腐れ等を示す典型的な色濃度の分布が存在する場合には、品質情報として最も小さい数値を与える処理を行う。この品質判定手段33による処理は、極めて短時間にうちに行われ、カメラ21で人参Xを撮影したタイミングと品質情報(外形等級と表面等級)が生成されるタイミングとの誤差は略同時とし捉えても良い。
【0049】
また、形状・サイズ判定処理では人参Xの容積を求めることが可能であるため、人参Xの重量を推定することも可能であり、このように推定した人参Xの重量に基づいて人参Xの品質の判定を行っても良い。また、等級は5段階に限らず5段階未満でも、6段階以上であっても良い。
【0050】
GPS型に構成される位置情報取得ユニットKは、位置情報を比較的短いインターバルで関連付処理手段35に出力するように処理形態が設定され、関連付処理手段35は、品質判定手段33から品質情報(外形等級と表面等級)を取得したタイミングで、この品質情報(外形等級と表面等級)と、品質が判定された人参Xの撮影画像情報と、位置情報取得ユニットKで取得した位置情報とを関連付ける処理を行い、このように生成された圃場情報がストレージ36に保存される(#04ステップ)。
【0051】
圃場情報が生成される場合には、圃場情報を識別可能にする名称情報と収穫日時情報とが与えられる。従って、ストレージ36には複数の圃場情報が識別可能に保存されると共に、同じ圃場情報でも収穫日時が異なるものを識別可能に保存される。特に、決まった圃場において圃場情報を生成する場合に、名称情報が等しく、異なる収穫日時情報となる圃場情報がストレージ36に保存されることになり、結果として、同じ圃場の圃場情報が蓄積する状態で保存される。尚、圃場を識別する名称情報は、位置情報取得ユニットKが自動的に生成するものであっても良く、また、作業者が任意に設定するものでも良い。このように、名称情報を任意に設定した場合に、この後に同じ圃場で収穫作業を行う場合に、位置情報取得ユニットKからの位置情報に基づき、既に設定されている名称情報を検索し、検索された名称情報を自動的に設定するように処理形態を設定しても良い。
【0052】
人参収穫機では、搬送機構Caで人参Xを引き抜いてカメラ21による撮影位置まで搬送するに所定の時間を要するため、品質情報(外形等級と表面等級)が生成されたタイミング(カメラ21で撮影されたタイミングと近似)において位置情報取得ユニットKで取得される位置情報と、引き抜かれる以前の人参Xの圃場での位置とに誤差を生ずる。この誤差を補正するため、関連付処理手段35では、品質情報が生成されたタイミングを基準にして、その人参Xがカメラ21で撮影される位置まで搬送機構Caで搬送される時間だけ遡った時刻における位置情報を品質情報(外形等級と表面等級)に関連付ける処理が行われる。また、位置情報取得ユニットKが設置された位置と、人参Xが引き抜かれる位置(収穫搬送部Cの先端位置)とは、平面視的にオフセットしており、位置情報取得ユニットKで取得された位置情報は、関連付処理手段35においてオフセット量に相当する距離だけ補正される。
【0053】
前述したように外形から判断した等級も、表面の色濃度から判断した等級も小さい値のものほど良い品質を表し、大きい値のものほど品質が低いものであることを表している。従って、排出制御手段34は、品質判定手段33で与えられた外形等級と表面等級との一方でも予め設定された等級より大きい数値の等級が与えられた人参Xであると判断した場合には排出カッター25により茎葉部Wから人参Xを切り離す処理を行い、設定された等級より小さい値の等級が与えられた人参Xであると判断した場合には排出を行わない(#05、#06ステップ)。
【0054】
これにより収穫物収容部Rに収容された人参Xは、設定された等級を越える良好な品質のものだけであり、この人参Xを改めて選別する必要がない。
【0055】
次に、作業者が圃場情報を送信する必要があると判断した場合や、予め設定されたタイミングで送信を行う必要がある場合には、送信ユニットLが圃場情報を管理端末Mに送信する(#07、#08ステップ)。この処理を行うことにより、管理端末Mにおいて圃場情報をモニタ38に表示する処理が可能となる。
【0056】
そして、この処理は、作業が終了した場合のように作業者により制御を停止する操作が行われるまで継続する(#09ステップ)。
【0057】
圃場情報は、経度と緯度とで特定される位置情報(座標情報)に対して、品質情報としての外形等級(s1〜s5)と、品質情報としての表面等級(d1〜d5)と、撮影画像情報とを関連付けて保存した構造を有している。管理端末Mには、処理装置Fのストレージ36と同様に圃場情報を保存するハードディスクやメモリ等の記憶手段(図示せず)を備えており、この記憶手段には、複数の圃場情報と、同じ圃場でも異なる収穫日時となる圃場情報とが識別可能に保存される。
【0058】
この圃場情報をモニタ38に表示するためのビューワが画像表示ユニットMBにインストールされ、このビューワで圃場情報をモニタ38に表示する場合には、圃場情報の名称情報と収穫日時を指定することで、図10に示すように、指定された圃場情報に基づいてビューワが圃場イメージ55を表示すると共に、圃場イメージ55に経度と緯度とで座標が特定される複数の位置に外形等級(s1〜s5)と表面等級(d1〜d5)とを数値で表示する。また、ビューワは、画面上で特定の位置をカーソル56で選択してクリック等の操作が行われた場合には、モニタ38に新たにウインドウ57を開き、このウインドウ57に対して選択された位置で収穫された人参Xの撮影画像情報を表示する。
【0059】
画像表示ユニットMBでモニタ38に圃場情報を表示する場合に、図10に示すように座標位置毎に品質情報を数値だけで表示するものに加えて、5段階の数値に対応した色相や色濃度を設定しておき、座標位置に部位に数値に対応した色表示を行うようにビューワによる表示形態を設定しても良い。また、圃場を3D表示すると共に、例えば、5段階の数値に対応して数値が小さいほど(高品質であるほど)バーグラフを高く表示する形態で圃場情報を表示するようにビューワによる表示形態を設定しても良い。
【0060】
また、管理端末Mでは複数の圃場情報のいずれか1つの名称情報を指定し、複数の収穫日時を指定してモニタ38に表示することも可能であり、このように収穫日時が異なる圃場情報を表示することにより、特定の圃場における品質の変化の傾向や、収量の変化の傾向をグラフ化して表示させるようにビューワの表示形態を設定しても良い。
【0061】
〔実施形態の作用・効果〕
このような構成から、搬送機構Caの搬送により圃場から引き抜かれた人参Xは、左右の遮光壁体23と前後の遮光機構Gとで取り囲まれる空間となる撮影領域に導入され、位置センサ24で検出されたタイミングでカメラ21により撮影される。撮影領域には1つの人参Xだけが導入され、撮影時には外部からの不要な光線が遮断されるので撮影光源22からの光線の照射のみによって1つの人参Xの撮影画像が取得される。処理装置Fでは、撮影画像情報に外部の構成が含まれず、1つの人参Xだけを撮影しているため等級を判定する処理(品質を判定する処理)を行う場合に不正確な判定に繋がる不都合を回避して、品質の判定を正確に行える。
【0062】
特に、遮光機構Gは、搬送機構Caの搬送方向で撮影領域の上流側と下流側と配置される2枚の遮光板28で構成され、人参Xが当接することにより揺動支軸28aを中心にして揺動することで開放して人参Xの通過を許し、通過の後にはバネ29の付勢力により即座に遮光板28の揺動端部が重なり合う閉じ姿勢に達し、この閉じ姿勢では光線の侵入を阻止するため良好な遮光を行う。更に、遮光板28が人参Xに当接する際に、この遮光板28が人参Xに付着している土を取り去ると共に、遮光板28との当接により人参Xの揺れを抑制する。これにより、表面の土が取り去られ、揺れが抑制された人参Xをカメラ21で撮影して品質の判定の精度の向上が実現する。
【0063】
カメラ21で撮影された撮影画像情報に基づいて処理装置Fの品質判定ユニットJでは品質情報として人参Xの外形等級と表面等級とを判定し、その人参Xを収穫した位置情報が位置情報取得ユニットKから取得され、この品質情報と位置情報とが関連付処理手段35により関連付けられ圃場情報が生成される。また、品質情報から低い品質と判定された人参Xは排出カッター25により茎葉部Wから切り離され、排出経路Hに沿って落下する形態で圃場面に排出される。これにより、例えば、商品価値のない人参Xが収穫物収容部Rに収容される構成と比較すると、収穫物収容部Rが満杯になるまでの時間を長くすることが可能となるだけではなく、不要な人参Xを運搬することがなく、走行機体Aを走行させるエネルギーを無駄に消費することがない。また、低品質であることが判定された人参Xは、搬送方向で下流側の遮光機構Gを通過した直後に排出カッター25により茎葉部Wから切り離され排出されるので、この切り離しの対象となる人参Xの特定に誤りがなく、搬送機構Caの搬送経路で無駄に搬送することなく早期の排出が実現する。
【0064】
圃場情報は走行機体Aのストレージ36に保存され、送信ユニットLにより管理端末Mに送信され、この管理端末Mのモニタ38に表示することが可能となり、この表示に基づいて圃場の土壌の状態を数値で認識できることになる。特に、モニタ38に表示された圃場イメージ55において、生育不良となる位置の状態を確認する場合には、その位置をカーソル56で選択してクリック等の操作により、その位置で収穫された人参Xの撮影画像情報が、新たに開かれたウインドウ57に表示されるため、生育不良の状況を視覚により確認して、生育不良の原因の判断を容易にする。
【0065】
また、圃場情報をモニタ38に表示する形態として、品質情報を色濃度として表示した場合や、バーブラフ的に表示した場合には、この表示から圃場情報から肥料が不足している範囲や、病気や害虫が発生している範囲を判定し、また、低品質の人参Xの発生率を把握して正確な対応を容易に行える。
【0066】
この圃場情報は、品質に基づいて圃場各部の土壌の状態の判定を実現し得るものであり、施肥や薬剤を散布位置の特定や、水捌けの向上を図る位置の特定や、新たな土壌の入れ換えを行う位置の特定を行う際の目安となり、土壌の改良により収穫される人参Xの品質向上を可能にする。従って、この圃場情報に基づいて、施肥装置による肥料の散布や、薬剤散布装置による薬剤の散布や、土壌の入れ換え等の作業を効率的に行い、その結果として高品質の人参の収穫や、収量の増大に結び付けることを可能にする。
【0067】
更に、圃場情報は、人参収穫機のストレージ36と管理端末Mの記憶手段との何れにも蓄積して保存できるため、圃場情報の名称情報と、複数の収穫時期の情報とを指定し、異なる収穫時期の圃場情報に基づいて圃場の領域毎における人参Xの品質の変動や、収穫量の変動をグラフ化してモニタ38に表示する等の処理により、圃場の状態を把握することも可能となる。同じ圃場について異なる収穫時期の圃場情報に基づいて領域毎における人参Xの品質の変動や、収穫量の変動を表示させた場合には、翌年等の将来の圃場の状況を推定することも高精度で行え、この推定により施肥の時期や、耕起の時期、あるいは、薬剤による殺菌・消毒の時期を設定して良好な品質の人参Xを収量の増大に繋げることを可能にする。また、1つの圃場において薬剤や肥料の散布の履歴として利用することも可能となる。
【0068】
圃場情報に天候や、出荷時期や、市況(人参Xの価格)を併せて保存も良く、この圃場情報を蓄積しておくことにより、蓄積した圃場情報から天候と人参Xの価格を推定することも可能となり、適切な収穫時期を設定して高価格で人参Xを出荷することも可能となる。
【0069】
〔別実施形態〕
本発明は、上記した実施形態以外に以下のように構成しても良い。
【0070】
(a)図11に示すように、走行機体Aに関連付処理手段35を備えずに、品質判定ユニットJと位置情報取得ユニットKを備え、品質判定ユニットJで生成される品質情報と、位置情報取得ユニットKで取得される位置情報とを送信ユニットLにより逐次送信し、この情報を受信ユニットMAで受信する管理端末Mに関連付処理手段35を備えて圃場情報生成システムを構成する。このように構成したものであっても、圃場情報を生成して圃場の土壌の状況を的確に把握できる。
【0071】
(b)走行機体Aに品質判定ユニットJと位置情報取得ユニットKと関連付処理手段35とストレージ36とを備えると共に、無線式に圃場情報を送信する送信ユニットLに構成に代えて、例えば、USBメモリ等の記憶媒体に圃場情報を保存するための媒体ドライブ等を走行機体Aに備え、媒体ドライブに記憶媒体をセットして圃場情報を記憶媒体にコピーする形態で記憶し、記憶した圃場情報を管理端末Mにロードしてモニタ38に表示するように圃場情報生成システムを構成する。このように記憶媒体に圃場情報を保存できるように構成したものでは、記憶媒体に記憶した圃場情報をパーソナルコンピュータにロードすることも可能となり、管理端末Mにおいて圃場の管理を容易に行える。
【0072】
(c)前述した別実施形態(b)の変形例として、ストレージ36に保存されている圃場情報を管理端末Mに対してUSBケーブル等により伝送可能な伝送ユニットを備える。このように伝送ユニットを備えてものでは、別実施形態(b)と同様にUSBケーブル等で圃場情報をパーソナルコンピュータに伝送することも可能となり、管理端末Mにおいて圃場の管理を容易に行える。
【0073】
(d)実施形態に記載した圃場情報は、経度と緯度とに品質情報を関連付けた絶対座標系(測地座標系)となる位置情報を有するものであるが、この圃場情報として、圃場の特定位置を基準とした座標に品質情報を関連付けた相対座標系となる位置情報を用いても良い。このような圃場情報を用いるものでも、圃場情報に基づいて圃場の管理が可能となる。
【0074】
(e)撮影手段として動画を撮影するデジタルムービーカメラを備えることで複数コマとなる撮影画像情報を取得するように構成する。このように複数コマの撮影画像情報を取得する構成では、複数のコマの撮影画像情報から最も良好に撮影された撮影画像情報に基づいて品質の判定を行うことや、複数のコマの撮影画像情報を合成したものに基づいて品質の判定が可能となり、判定精度を高めることが可能となる。
【0075】
(f)撮影手段として、地中塊部(人参X)を異なる方向から撮影する複数のカメラ21を備える。このカメラ21は、別実施形態(c)のようにデジタルムービーカメラであっても良い。このように複数のカメラ21で地中塊部(人参X)を撮影することで、例えば、地中塊部(人参X)の立体形状を把握して、品質の判定の精度を高めることが可能となる。
【0076】
(g)作物として、人参Xのほか、大根、牛蒡、玉葱、芋類等の地中で成長するものを収穫対象としても良い。
【産業上の利用可能性】
【0077】
本発明は、作物の茎葉部Wに搬送力を作用させて地中塊部を引き抜く形態で収穫を行う作物収穫機に利用することができる。
【符号の説明】
【0078】
21 撮影手段(カメラ)
35 関連付処理手段
36 ストレージ
A 機体(走行機体)
C 収穫部(収穫搬送部)
Ca 搬送機構
J 品質判定ユニット
K 位置情報取得ユニット
L 送信ユニット
W 茎葉部
X 地中塊部(人参)
【特許請求の範囲】
【請求項1】
作物を収穫する収穫機に対して、この収穫機で収穫された前記作物の品質を判定する品質判定ユニットと、前記収穫機の位置情報を取得する位置情報取得ユニットとを備えている圃場情報生成システムであって、
前記収穫機が、前記作物として圃場の地中に生育する地中塊部の収穫を行う収穫部を備えて構成されると共に、前記品質判定ユニットが、収穫した前記地中塊部を撮影する撮影手段の撮影画像情報に基づいて前記地中塊部の品質を判定する処理を行い、
前記収穫機により1つの圃場で収穫が行われる際に、前記品質判定ユニットで取得される前記地中塊部の品質情報と、その地中塊部が収穫されたタイミングにおいて前記位置情報取得ユニットで取得される位置情報とを取得し、この品質情報と前記位置情報とを関連付けて圃場情報を生成する関連付処理手段を備えている圃場情報生成システム。
【請求項2】
前記品質判定ユニットは、前記品質情報として前記地中塊部の形状情報と色濃度情報との少なくとも一方に基づく数値を生成し、前記関連付処理手段は、前記圃場において収穫された前記地中塊部の位置情報が示される位置に前記数値の表示が可能な情報構造の圃場情報を生成する請求項1記載の圃場情報生成システム。
【請求項3】
前記関連付処理手段で生成された前記圃場情報を保存するストレージを前記収穫機に備えている請求項1又は2記載の圃場情報生成システム。
【請求項4】
前記地中塊部の前記品質情報と、この品質情報の前記地中塊部が収穫されたタイミングの前記位置情報とを送り出す送信ユニットが前記収穫機に備えられ、
前記送信ユニットから送られた前記品質情報と前記位置情報とを関連付けて前記圃場情報を生成する前記関連付処理手段が前記収穫機から分離して配置されている請求項1又は2記載の圃場情報生成システム。
【請求項5】
前記収穫機が、機体の走行に伴って前記作物の茎葉部に機体後方上方に向かう搬送力を作用させて前記地中塊部を圃場から引き抜く搬送機構を備えており、この搬送機構で搬送される前記地中塊部を撮影する位置に前記撮影手段が備えられている請求項1〜4のいずれか一項に記載の圃場情報生成システム。
【請求項1】
作物を収穫する収穫機に対して、この収穫機で収穫された前記作物の品質を判定する品質判定ユニットと、前記収穫機の位置情報を取得する位置情報取得ユニットとを備えている圃場情報生成システムであって、
前記収穫機が、前記作物として圃場の地中に生育する地中塊部の収穫を行う収穫部を備えて構成されると共に、前記品質判定ユニットが、収穫した前記地中塊部を撮影する撮影手段の撮影画像情報に基づいて前記地中塊部の品質を判定する処理を行い、
前記収穫機により1つの圃場で収穫が行われる際に、前記品質判定ユニットで取得される前記地中塊部の品質情報と、その地中塊部が収穫されたタイミングにおいて前記位置情報取得ユニットで取得される位置情報とを取得し、この品質情報と前記位置情報とを関連付けて圃場情報を生成する関連付処理手段を備えている圃場情報生成システム。
【請求項2】
前記品質判定ユニットは、前記品質情報として前記地中塊部の形状情報と色濃度情報との少なくとも一方に基づく数値を生成し、前記関連付処理手段は、前記圃場において収穫された前記地中塊部の位置情報が示される位置に前記数値の表示が可能な情報構造の圃場情報を生成する請求項1記載の圃場情報生成システム。
【請求項3】
前記関連付処理手段で生成された前記圃場情報を保存するストレージを前記収穫機に備えている請求項1又は2記載の圃場情報生成システム。
【請求項4】
前記地中塊部の前記品質情報と、この品質情報の前記地中塊部が収穫されたタイミングの前記位置情報とを送り出す送信ユニットが前記収穫機に備えられ、
前記送信ユニットから送られた前記品質情報と前記位置情報とを関連付けて前記圃場情報を生成する前記関連付処理手段が前記収穫機から分離して配置されている請求項1又は2記載の圃場情報生成システム。
【請求項5】
前記収穫機が、機体の走行に伴って前記作物の茎葉部に機体後方上方に向かう搬送力を作用させて前記地中塊部を圃場から引き抜く搬送機構を備えており、この搬送機構で搬送される前記地中塊部を撮影する位置に前記撮影手段が備えられている請求項1〜4のいずれか一項に記載の圃場情報生成システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2013−74807(P2013−74807A)
【公開日】平成25年4月25日(2013.4.25)
【国際特許分類】
【出願番号】特願2011−215361(P2011−215361)
【出願日】平成23年9月29日(2011.9.29)
【出願人】(000001052)株式会社クボタ (4,415)
【Fターム(参考)】
【公開日】平成25年4月25日(2013.4.25)
【国際特許分類】
【出願日】平成23年9月29日(2011.9.29)
【出願人】(000001052)株式会社クボタ (4,415)
【Fターム(参考)】
[ Back to top ]