
地図生成装置、車載情報端末
【課題】ラウンドアバウトのような特殊な形状を有する道路の周辺の道路地図を分かりやすく表示する。
【解決手段】ラウンドアバウトのように予め定められた特殊な形状を有する道路を所定の要約対象範囲内において抽出し(ステップS20)、その道路に近似する近似図形を表す関数を導き出して(ステップS30)、その道路を導き出された関数によって表される近似図形に置き換える(ステップS40)。こうして置き換えられた近似図形を含む地図をデフォルメ処理により簡略化し(ステップS50)、表示モニタ16に表示する(ステップS60)。
【解決手段】ラウンドアバウトのように予め定められた特殊な形状を有する道路を所定の要約対象範囲内において抽出し(ステップS20)、その道路に近似する近似図形を表す関数を導き出して(ステップS30)、その道路を導き出された関数によって表される近似図形に置き換える(ステップS40)。こうして置き換えられた近似図形を含む地図をデフォルメ処理により簡略化し(ステップS50)、表示モニタ16に表示する(ステップS60)。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、地図データに基づいて地図を生成し表示する地図生成装置および車載情報端末に関する。
【背景技術】
【0002】
道路地図の要約表示に関して、例えば道路の直交・直進化を基本として整形することで視認性を向上する技術がある(例えば、特許文献1参照)。また、地図上にはラウンドアバウトと呼ばれる複数の地点で本線道路と接続し方向転換のために進入する環状の道路があり、欧州に多く見られる。このラウンドアバウトについては、ラウンドアバウトのパターンを描画しその周辺に進入道路だけを描画するというものが知られている。例えば、ラウンドアバウトに入る道路、出る道路の角度、取り付け位置、道路名称、ラウンドアバウトを構成する各リンクの変化角、入る道路と出る道路の前後の道路情報を用いてUターン方向の判定、左右の判定等を行い、方向案内を行う技術がある(例えば、特許文献2参照)。さらに、実際のラウンドアバウトの形状に近いデフォルメ図を作成し、その表示パターンを別画面表示する方法が提案されている(例えば、特許文献3)。
【0003】
【特許文献1】特開2004−139485号公報
【特許文献2】特開平11−51684号公報
【特許文献3】特開2004−108969号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
ラウンドアバウトの様に特定の運転操作が要求される地点については、実際の道路形状そのままより、ラウンドアバウト等であることを明示した方が運転者にとって地図が理解しやすい。しかし、特許文献1に開示されているように周辺地図と同じようにデフォルメすると、ラウンドアバウト等の地点の視認性向上が図れない。また、特許文献2や特許文献3の装置は、ラウンドアバウトのパターンの他には、そのラウンドアバウトのパターンに進入する道路のみ、できるだけ現実に近い形で描画しようとするものであり、それ以上広域の周辺地図を同時に表示することはできない。したがって、ラウンドアバウトの周辺については、特許文献1〜3に開示される従来の技術を用いても、分かりやすい道路地図を表示できない。
【課題を解決するための手段】
【0005】
請求項1の発明による地図生成装置は、予め定められた特殊な形状を有する特殊形状道路を所定の地図範囲内から抽出する抽出手段と、抽出手段により抽出された特殊形状道路に近似する近似図形を表す関数を導き出す導出手段と、抽出手段により抽出された特殊形状道路を、導出手段により導き出された関数によって表される近似図形に置き換える置換手段と、置換手段により置き換えられた近似図形を含む地図を表示モニタに表示する表示制御手段とを備える。
請求項2の発明は、請求項1の地図生成装置において、特殊形状道路にはラウンドアバウトが含まれ、導出手段は、ラウンドアバウトに近似する近似図形を表す関数として、円形または楕円形を表す関数を導き出すものである。
請求項3の発明は、請求項1または2の地図生成装置において、記導出手段は、近似図形を表す関数を導き出すときに、最小二乗法を用いて関数の各定数の値を求めるものである。
請求項4の発明は、請求項1〜3いずれか一項の地図生成装置において、地図範囲内の道路形状を簡略化するデフォルメ手段をさらに備え、表示制御手段は、置換手段により置き換えられた近似図形と、デフォルメ手段により形状を簡略化された道路とを含む要約地図を表示モニタに表示するものである。
請求項5の発明による車載情報端末は、請求項1〜4いずれか一項の地図生成装置と、自車位置を検出する自車位置検出手段と、自車位置検出手段により検出された自車位置に基づいて地図範囲を設定する地図範囲設定手段とを備える。
【発明の効果】
【0006】
本発明によれば、ラウンドアバウトのような特殊な形状を有する道路の周辺の道路地図を分かりやすく表示することができる。
【発明を実施するための最良の形態】
【0007】
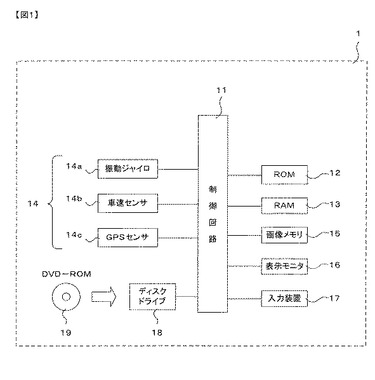
本発明の一実施形態によるナビゲーション装置の構成を図1に示す。このナビゲーション装置は、車両に搭載されており、通常の地図を基に道路形状などを簡略化することにより、通常の地図を要約した地図(以下、要約地図という)を作成し表示するものである。図1のナビゲーション装置1は、制御回路11、ROM12、RAM13、現在地検出装置14、画像メモリ15、表示モニタ16、入力装置17、およびディスクドライブ18を有している。ディスクドライブ18には、地図データが記録されたDVD−ROM19が装填される。
【0008】
制御回路11は、マイクロプロセッサおよびその周辺回路からなり、RAM13を作業エリアとしてROM12に格納された制御プログラムを実行することにより、各種の処理や制御を行う。この制御回路11が後で説明するような要約地図作成処理を行うことによって、DVD−ROM19に記録された地図データに基づいて要約地図が作成され、表示モニタ16に表示される。
【0009】
現在地検出装置14は、自車両の現在地を検出する装置であり、たとえば、自車両の進行方向を検出する振動ジャイロ14a、車速を検出する車速センサ14b、GPS衛星からのGPS信号を検出するGPSセンサ14c等からなる。ナビゲーション装置1は、この現在地検出装置14により検出された自車両の現在地に基づいて、要約地図を作成する範囲や経路探索開始点などを決定するとともに、要約地図上にその現在地を表示する。
【0010】
画像メモリ15は、表示モニタ16に表示する画像データを格納する。この画像データは、要約地図を表示するための道路地図描画用データや各種の図形データ等からなり、それらは制御回路11の要約地図作成処理によって作成される。表示モニタ16は、制御回路11からの制御により、画像メモリ15に格納された画像データを用いて要約地図を画面表示しユーザに提供する。
【0011】
入力装置17は、ユーザが目的地や経由地(以下、これらを合わせて単に目的地という)を設定したりするための各種入力スイッチを有し、これは操作パネルやリモコンなどによって実現される。ユーザは、表示モニタ16に表示される画面指示に従って入力装置17を操作することにより、地名や地図上の位置を指定して目的地を設定することができる。
【0012】
ディスクドライブ18は、要約地図を作成するための地図データを、装填されたDVD−ROM19より読み出す。この地図データには、目的地までの推奨経路を演算するために用いられる経路計算データや、交差点名称、道路名称など、推奨経路に従って自車両を目的地まで誘導するために用いられる経路誘導データ、道路を表す道路データ、さらには河川や鉄道、地図上の各種施設(ランドマーク)など、道路以外の地図形状を表す背景データなどが含まれている。
【0013】
道路データにおいて、道路区間を表す最小単位はリンクと呼ばれており、各道路は複数のリンクによって構成されている。リンク同士を接続している点、すなわち各リンクの端点はノードと呼ばれ、このノードはそれぞれに位置情報(座標情報)を有している。このノードの位置情報によって、リンク形状、すなわち道路の形状が決定される。なお、複雑な道路形状を表現するために、必要に応じてリンクの途中に屈曲点または形状補間点と呼ばれる点が設定されることもある。以下の説明では、これらの点を全て合わせてノードと呼ぶこととする。
【0014】
上記のような道路データに対して、後で説明するような要約地図作成処理を実行することにより、要約地図が作成される。リンクのそれぞれには、道路の種別に関する情報(リンク種別)が設定されている。なお、ここではDVD−ROMを用いた例について説明しているが、DVD−ROM以外の他の記録メディア、たとえばCD−ROMやハードディスクなどより、地図データを読み出すこととしてもよい。
【0015】
ユーザにより前述のようにして目的地が設定されると、ナビゲーション装置1は、現在地検出装置14により検出された現在地を経路探索開始点として、目的地までの経路演算を前述の経路計算データに基づいて所定のアルゴリズムにより行う。こうして求められた推奨経路は、その表示形態、たとえば表示色などを変えることによって、他の道路とは区別して要約地図上に表される。これにより、ユーザは要約地図上の推奨経路を画面上で認識することができる。また、この推奨経路に従って自車両が走行できるよう、ナビゲーション装置1は、ユーザに対して画像や音声などによる進行方向指示を行うことにより、自車両を誘導する。このようにして、自車両を目的地まで案内する。
【0016】
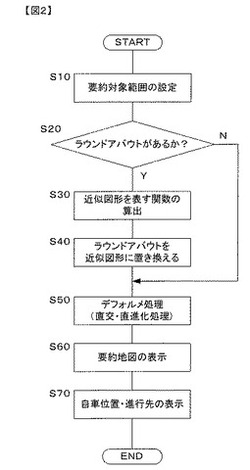
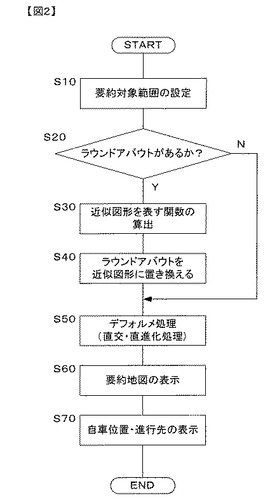
制御回路11において実行される要約地図作成処理のフローチャートを図2に示す。ステップS10では、要約地図を作成する対象とする地図の範囲(要約対象範囲)を設定する。ここでは、たとえば自車位置から所定範囲内を要約対象範囲に設定する。
【0017】
ステップS20では、ステップS10で設定した要約対象範囲内にラウンドアバウトがあるか否かを判定することにより、要約対象範囲内においてラウンドアバウトの道路を抽出する。ラウンドアバウトは、環状交差点やロータリーなどとも呼ばれ、進入した車両は予め決められた一方向にのみ周回することを許される円形状の特殊な道路である。ラウンドアバウトであるか否かの判断は、予め地図データに設定されたリンク種別に基づいて行ってもよいし、あるいは道路形状から判断してもよい。要約対象範囲内にラウンドアバウトがある場合は、ステップS30へ進む。しかし、要約対象範囲内にラウンドアバウトがない場合は、以下に説明するようなステップS30とステップS40の処理を実行せずに、ステップS50へ進む。
【0018】
ステップS30では、ステップS20で要約対象範囲内にあると判定されたラウンドアバウトの道路形状に近似しており、そのラウンドアバウトを要約地図において置き換えるための図形(以下、近似図形と呼ぶ)を算出する。このとき、地図座標値を変数とする関数によって近似図形を表し、元のラウンドアバウトに最も近い形状となるような関数を導き出すことにより、近似図形の算出を行う。なお、近似図形を表す関数は、元の道路形状に基づいて最小二乗法などの最適化計算を用いることにより求められる。具体的には、以下に説明するようにして近似図形を表す関数を導き出す。
【0019】
ラウンドアバウトは、一般に円形や楕円形に近い形状をしていることが多いため、ラウンドアバウトの近似図形には円形または楕円形が用いられる。この近似図形を表す関数を下記の式(1)に示す。式(1)によって表される円形や楕円形の近似図形によりラウンドアバウトの部分を置き換えて要約地図を作成することで、ユーザは容易にラウンドアバウトの存在を要約地図上に認識できる。
(x−x0)2/a2+(y−y0)2/b2=1 ・・・(1)
【0020】
式(1)において、xとyは近似図形の地図座標値を表している。すなわち、式(1)の条件を満たす点(x,y)の軌跡を地図上に描画することにより、円形や楕円形の近似図形が表される。x0,y0,aおよびbはいずれも定数を表しており、これらの各定数の値は、式(1)によって描画される円形や楕円形が元の地図におけるラウンドアバウトの形状に最も近似するように決定される。なお、式(1)においてaとbが同一でなければ楕円形の近似図形となり、a=bのときには円形の近似図形となる。
【0021】
上記の各定数値の決定には、非線形最小二乗法と呼ばれる非線形関数の最適化計算の方法を用いることができる。すなわち、式(1)の軌跡と元のラウンドアバウトを構成する各ノード間との距離の二乗和を計算し、その値が最小となるような定数x0,y0,aおよびbを求めることにより、元の地図におけるラウンドアバウトに最も近似する円形または楕円形の近似図形が求められる。なお、座標(x0,y0)は近似図形の中心点を表すため、元のラウンドアバウトの中心点が分かれば、その座標値により定数x0とy0を決定してもよい。
【0022】
ステップS30では、以上説明したようにして式(1)の関数の各定数値を求めることにより、近似図形が算出される。
【0023】
なお、上記の説明では式(1)により表される円形や楕円形の近似図形としたが、それ以外の形状を近似図形とすることもできる。たとえば、長方形や正方形、トラックコース型、半円、角が丸い四角形、ひょうたん型、水滴型など、様々な図形を近似図形とすることができる。その場合、式(1)の代わりに、その近似図形に応じた関数が用いられる。さらに、複数種類の図形を選択可能とし、その中から元のラウンドアバウトに最も近いものを近似図形としてもよい。また、近似図形を表す関数の各定数値を求める際には、最小二乗法以外にも様々な最適化計算の方法を用いることができる。
【0024】
ステップS40では、ステップS20で見つけ出された要約対象範囲内のラウンドアバウトを、ステップS30で算出された近似図形に置き換える。このとき、必要に応じてラウンドアバウトに接続された道路を延長または短縮し、置き換えた後の近似図形と接続するようにする。
【0025】
ステップS50では、要約対象範囲内の道路形状を簡略化するデフォルメ処理を行う。このデフォルメ処理は、道路の交差角度をなるべく直交化するとともに、道なりに進む道路をなるべく直進化することによって行われる。その具体的な方法については後で説明する。なお、ステップS40でラウンドアバウトに置き換えられた近似図形については、式(1)を満たす範囲でデフォルメ処理を行うことにより、デフォルメ処理にもその形状が維持されるようにする。
【0026】
ステップS60では、ステップS50のデフォルメ処理によって作成された要約地図を表示モニタ16に表示する。その結果、ステップS40でラウンドアバウトに置き換えられた式(1)の近似図形と、ステップS50のデフォルメ処理によって形状を簡略化されたラウンドアバウト以外の道路とを含む要約地図が表示される。ステップS70では、ステップS60で表示した要約地図上に、自車位置および進行先方向の表示を行う。ステップS70を実行した後は、図2の処理フローを終了する。以上説明したようにして要約地図の作成処理が行われ、要約地図が表示される。
【0027】
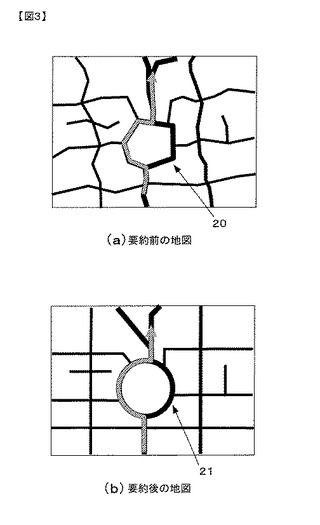
図3は、上記のようにして作成された要約地図の例を示している。図3(a)は要約前の地図を表しており、符号20に示すラウンドアバウトの道路形状がそのまま地図上に表されている。図3(b)は要約後の地図を表しており、ラウンドアバウトが符号21に示す円形の近似図形によって置き換えられるとともに、他の道路形状についても形状が簡略化されている。
【0028】
次に、図2のステップS50で実行されるデフォルメ処理について説明する。デフォルメ処理では、前述のように道路の交差角度をなるべく直交化するとともに、道なりに進む道路をなるべく直進化することにより、道路形状を簡略化する。このような処理は直交・直線化処理と呼ばれる公知の処理手法によって実現される。直交・直線化処理の内容を以下に説明する。
【0029】
直交・直線化処理は、道路地図における各リンクの端点及び屈曲点を含む各ノードの位置を初期配置として設定し、所定の評価関数に基づいて各ノードを再配置する最適化処理ループをその評価関数の収束条件が満足されるまで繰り返すことにより行われる。上記の評価関数は、道路長の保存を示す第一の項と、道路の直交化を示す第二の項と、道路の直進化を示す第三の項とからなる。すなわち、(A)道路長をなるべく初期値のまま保存すること(道路長の保存)、(B)道路間の交差角度をなるべく直交化すること(道路の直交化)、(C)道なりに進む道路をなるべく直進化すること(道路の直進化)を最終目標に設定して、直交・直線化処理が行われる。
【0030】
具体的には、上記(A)で述べた道路長の保存を示す第一の項E1と、上記(B)で述べた道路の直交化を示す第二の項E2と、上記(C)で述べた道路の直進化を示す第三の項E3とからなる評価関数Eを、下記の式(2)のように設定する。この評価関数Eに基づいて、評価関数Eの値を最小とするようなE1、E2およびE3を求める最適化処理を行い、その結果にしたがって各リンクのノードや形状補間点を再配置する。これにより、直交・直線化処理が行われる。
E =E1+E2+E3 ・・・(2)
【0031】
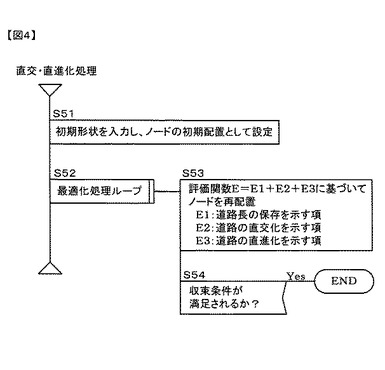
直交・直進化処理のフローチャートを図4に示す。直交・直進化処理では、各リンクを構成する点(ノードおよび形状補間点)の初期配置を設定するための初期配置ステップS51と、式(2)の評価関数Eに基づいて各点を再配置するための再配置ステップS53と、再配置結果の収束判定を行うための収束判定ステップS54と、最適化処理ループステップS52とを実行する。
【0032】
初期配置ステップS51では、地図データに基づいて道路地図の初期形状を入力し、端点及び屈曲点を含むリンク上の各点の初期配置として設定する。再配置ステップS53では、式(2)において道路長の保存を示す第一の項E1と、道路の直交化を示す第二の項E2と、道路の直進化を示す第三の項E3とからなる上記の評価関数Eに基づいて、各ノードを再配置する。収束判定ステップS54では、所定の収束条件が満足されているかどうかの判定を行う。最適化処理ループステップS52では、収束判定ステップS54において収束条件が満足されると判定されるまで、上記の再配置ステップS53と収束判定ステップS54を繰り返す。
【0033】
上記の各ステップを実行することにより、道路長をなるべく初期値のまま保存しながら、道路間の交差角度をなるべく直交化し、道なりに進む道路をなるべく直進化することができる。ここで、道なりに進む道路とは交差点での直進性の高い道路を表すものとし、交差点での仰角差が最小となる組合せについて、その仰角差が小さい場合に直進性が高いと判断する。すなわち、直交・直進化処理は、評価関数Eに基づいてノードを再配置させながら、最適なノード配置を求める。これにより、複数の道路が複雑に交差するような形状であっても有効な変形を可能にしている。
【0034】
式(2)の評価関数Eを設定する際に、E1〜E3の各項は次のようにして設定される。道路長の保存を示す第一の項E1は、道路長をなるべく初期値のまま保存するように、例えば、道路長が初期値のときに最小となり、初期値との差が大きくなるほど増大する関数を設定する。
【0035】
道路の直交化を示す第二の項E2は、道路の交差角度をなるべく直交化するように、例えば、道路の交差角度が理想的な角度のときに最小となる関数を設定する。ここで、理想的な角度は初期角度を90度単位で正規化した値をとり、ノードのまわりでの交差角度の和が360度になる等のトポロジー保存条件が満足されない場合には、例えば、1/2の角度で正規化しなおす等の措置をとって、なるべくトポロジー保存条件が満足されるように設定する。
【0036】
道路の直進化を示す第三の項E3は、道なりに進む道路をなるべく直進化するように、交差点において直進性の高い道路の組合せについて、例えば、交差角度が180度のときに最小となる関数を設定する。交差点における直進性の判定では、例えば、仰角の差が最小となる組合せで、仰角の差が閾値以下となる場合に直進性が高いと判断する。この第三の項E3が示すように、直交・直進化処理では道路方向を正規化することでなく、道路をなるべく直交化することを目指している。そのため、最初の地図の向きによって結果が異なってしまうという問題を解決し、座標回転に依存しない変形を可能にしている。
【0037】
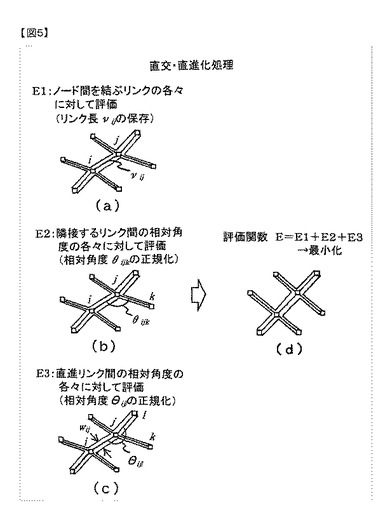
評価関数Eの各項E1、E2およびE3の具体的な設定方法を図5に示す。図5(a)は、道路長の保存を示す第一の項E1の設定方法を示している。第一の項E1は、ノード間を結ぶリンクの各々に対応する項の和として計算される。図5(b)は、道路の直交化を示す第二の項E2の設定方法を示している。第二の項E2は、隣接するリンク間の相対角度の各々に対応する項の和として計算される。図5(c)は、道路の直進化を示す第三の項E3の設定方法を示している。第三の項E3は、三本以上のリンクが接続するノードで直進すると判断されたリンク間の相対角度の各々に対応する項の和として計算される。
【0038】
なお、前述したように、第一の項E1は、例えば、リンク長が初期値のときに最小となる関数として設定される。第二の項E2は、例えば、相対角度が理想的な角度のときに最小となる関数として設定される。第三の項E3は、例えば、相対角度が180度のときに最小となる関数として設定される。
【0039】
上記のようにすることで、道路長の保存を示す第一の項E1と、道路の直交化を示す第二の項E2と、道路の直進化を示す第三の項E3とを総合的に評価できるようになる。その結果、道路地図全体をバランスよく、且つ、矛盾のないように変形させることが可能となる。
【0040】
また、道路の直進化を示す第三の項E3における各項の重み付け係数を道路幅に依存させて設定することにより、各項の重み付け係数を道路幅の広い場合には大きく、道路幅の狭い場合には小さく設定できる。このようにすることで、道路幅の広い道路の直進化を優先させたいといった要求の実現が可能になる。なお、各項の重み付け係数を設定する際には、道路幅の代わりに道路の種別等を用いて設定してもよいものとする。
【0041】
式(2)の評価関数Eを設定する際、更に、道路長の保存を示す第一の項と、道路の直交化を示す第二の項の重み付け係数と、道路の直進化を示す第三の項の重み付け係数をそれぞれ、最適化処理ループの反復回数に応じて変化させることにより、各項の優先度を反復ステップに応じて変化させてもよい。これにより、各項の優先度は反復ステップに応じて制御できるようになるため、道路長の保存と、道路の直交化と、道路の直進化とが矛盾する場合であっても、反復処理によって矛盾を解消することができ、有効なデフォルメ結果を得ることが可能となる。
【0042】
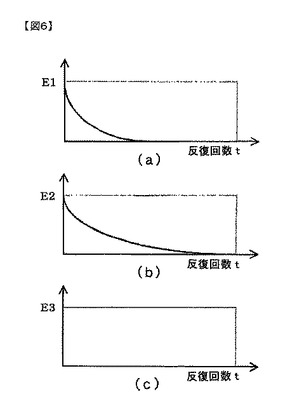
図6は、評価関数Eの各項E1、E2およびE3の係数を反復回数に応じて変化させた場合における反復回数と各項の大きさの変化の様子の一例を示している。図6において、(a)は道路長の保存を示す第一の項E1、(b)は道路の直交化を示す第二の項E2、(c)は道路の直進化を示す第三の項E3の反復回数に対する依存性をそれぞれ表す。この図は、第三の項E3の重み付け係数を一定に保ちながら、第一の項E1と第二の項E2の重み付け係数を反復係数に伴って減衰させ、さらに、第一の項E1を第二の項E2より急速に減衰させることを表している。すなわち、道路の直進化を最も優先させ、その次に道路の直交化と道路長の保存をこの順に優先させることを表している。このように、各項の重み付け係数を適切に変化させることにより、道路の直進化を最優先させ、道路の直交化を道路長の保存より優先させたいといった要求の実現も可能となる。
【0043】
以上説明したような直交・直線化処理を行うことにより、図2のステップS50においてデフォルメ処理が実行される。その結果、道路の形状が簡略化され、要約地図が作成される。
【0044】
以上説明した実施の形態によれば、次の作用効果が得られる。
(1)ラウンドアバウトのように予め定められた特殊な形状を有する道路を所定の要約対象範囲内において抽出し(ステップS20)、その道路に近似する近似図形を表す関数を導き出して(ステップS30)、その道路を導き出された関数によって表される近似図形に置き換える(ステップS40)。こうして置き換えられた近似図形を含む地図を表示モニタ16に表示する(ステップS60)。このようにしたので、ラウンドアバウトのような特殊な形状を有する道路の周辺の道路地図を分かりやすく表示することができる。
【0045】
(2)ステップS30において、ラウンドアバウトに近似する近似図形を表す関数として円形または楕円形を表す関数を導き出すこととした。このようにしたので、一般に円形や楕円形に近い形状をしているラウンドアバウトについて、適切な近似図形を求めることができる。
【0046】
(3)ステップS30において近似図形を表す関数を導き出すときに、最小二乗法を用いて関数の各定数の値を求めることとしたので、簡単かつ確実に各定数の値を求めることができる。
【0047】
(4)デフォルメ処理により要約対象範囲内の道路形状を簡略化し(ステップS50)、ラウンドアバウトに置き換えられた近似図形と、形状を簡略化された道路とを含む要約地図を表示する(ステップS60)こととしたので、より一層分かりやすい地図を表示することができる。
【0048】
上記の実施の形態では、特殊な形状を有する道路としてラウンドアバウトを例に説明したが、それ以外の道路について適用してもよい。たとえば、立体交差の側道などに適用することもできる。また、道路以外にも鉄道などに適用することとしてもよい。これらについても、上記に説明したのと同様の方法によって近似図形を表す関数を導き出して置き換えることができる。
【0049】
上記実施の形態では、ナビゲーション装置において、DVD−ROMなどの記憶メディアより地図データを読み出して要約地図を作成する例について説明しているが、本発明はこの内容には限定されない。たとえばパソコンやPDA(Personal Digital Assistance)、携帯電話など、ナビゲーション装置以外であっても、地図データに基づいて地図を生成し表示する各種の装置について適用可能である。また、携帯電話などによる無線通信を用いて、地図データを情報配信センターからダウンロードする通信ナビゲーション装置などにおいても、本発明を適用できる。この場合、上記に説明したような要約地図の作成処理を情報配信センターにおいて行い、その結果を情報配信センターから信号出力してナビゲーション装置へ配信するようにしてもよい。すなわち、情報配信センターは、要約地図を作成する装置と、その要約地図を外部へ信号出力する装置によって構成される。
【0050】
以上説明した各実施の形態や各種の変形例はあくまで一例であり、発明の特徴が損なわれない限り、本発明はこれらの内容に限定されない。
【0051】
上記の実施の形態では、自車位置検出手段を現在地検出装置14により設定し、その他の各手段を制御回路11の処理によって実現することとした。具体的には、地図範囲設定手段をステップS10、抽出手段をステップS20、導出手段をステップS30、置換手段をステップS40、デフォルメ手段をステップS50、表示制御手段をステップS60の各処理によって実現している。しかし、これはあくまで一例であり、発明を解釈する際、上記の各実施形態の記載事項と特許請求の範囲の記載事項の対応関係には何ら限定も拘束もされない。
【図面の簡単な説明】
【0052】
【図1】本発明の一実施形態によるナビゲーション装置の構成を示すブロック図である。
【図2】要約地図作成処理のフローチャートである。
【図3】作成された要約地図の例であり、(a)は要約前の地図、(b)は要約後の地図をそれぞれ表している。
【図4】直交・直進化処理のフローチャートである。
【図5】評価関数Eの各項E1、E2およびE3の具体的な設定方法である。
【図6】評価関数Eの各項E1、E2およびE3の係数を反復回数に応じて変化させた場合における反復回数と各項の大きさの変化の様子の一例を示した図である。
【符号の説明】
【0053】
1 ナビゲーション装置
11 制御回路
12 ROM
13 RAM
14 現在地検出装置
15 画像メモリ
16 表示モニタ
17 入力装置
18 ディスクドライブ
19 DVD−ROM
【技術分野】
【0001】
本発明は、地図データに基づいて地図を生成し表示する地図生成装置および車載情報端末に関する。
【背景技術】
【0002】
道路地図の要約表示に関して、例えば道路の直交・直進化を基本として整形することで視認性を向上する技術がある(例えば、特許文献1参照)。また、地図上にはラウンドアバウトと呼ばれる複数の地点で本線道路と接続し方向転換のために進入する環状の道路があり、欧州に多く見られる。このラウンドアバウトについては、ラウンドアバウトのパターンを描画しその周辺に進入道路だけを描画するというものが知られている。例えば、ラウンドアバウトに入る道路、出る道路の角度、取り付け位置、道路名称、ラウンドアバウトを構成する各リンクの変化角、入る道路と出る道路の前後の道路情報を用いてUターン方向の判定、左右の判定等を行い、方向案内を行う技術がある(例えば、特許文献2参照)。さらに、実際のラウンドアバウトの形状に近いデフォルメ図を作成し、その表示パターンを別画面表示する方法が提案されている(例えば、特許文献3)。
【0003】
【特許文献1】特開2004−139485号公報
【特許文献2】特開平11−51684号公報
【特許文献3】特開2004−108969号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
ラウンドアバウトの様に特定の運転操作が要求される地点については、実際の道路形状そのままより、ラウンドアバウト等であることを明示した方が運転者にとって地図が理解しやすい。しかし、特許文献1に開示されているように周辺地図と同じようにデフォルメすると、ラウンドアバウト等の地点の視認性向上が図れない。また、特許文献2や特許文献3の装置は、ラウンドアバウトのパターンの他には、そのラウンドアバウトのパターンに進入する道路のみ、できるだけ現実に近い形で描画しようとするものであり、それ以上広域の周辺地図を同時に表示することはできない。したがって、ラウンドアバウトの周辺については、特許文献1〜3に開示される従来の技術を用いても、分かりやすい道路地図を表示できない。
【課題を解決するための手段】
【0005】
請求項1の発明による地図生成装置は、予め定められた特殊な形状を有する特殊形状道路を所定の地図範囲内から抽出する抽出手段と、抽出手段により抽出された特殊形状道路に近似する近似図形を表す関数を導き出す導出手段と、抽出手段により抽出された特殊形状道路を、導出手段により導き出された関数によって表される近似図形に置き換える置換手段と、置換手段により置き換えられた近似図形を含む地図を表示モニタに表示する表示制御手段とを備える。
請求項2の発明は、請求項1の地図生成装置において、特殊形状道路にはラウンドアバウトが含まれ、導出手段は、ラウンドアバウトに近似する近似図形を表す関数として、円形または楕円形を表す関数を導き出すものである。
請求項3の発明は、請求項1または2の地図生成装置において、記導出手段は、近似図形を表す関数を導き出すときに、最小二乗法を用いて関数の各定数の値を求めるものである。
請求項4の発明は、請求項1〜3いずれか一項の地図生成装置において、地図範囲内の道路形状を簡略化するデフォルメ手段をさらに備え、表示制御手段は、置換手段により置き換えられた近似図形と、デフォルメ手段により形状を簡略化された道路とを含む要約地図を表示モニタに表示するものである。
請求項5の発明による車載情報端末は、請求項1〜4いずれか一項の地図生成装置と、自車位置を検出する自車位置検出手段と、自車位置検出手段により検出された自車位置に基づいて地図範囲を設定する地図範囲設定手段とを備える。
【発明の効果】
【0006】
本発明によれば、ラウンドアバウトのような特殊な形状を有する道路の周辺の道路地図を分かりやすく表示することができる。
【発明を実施するための最良の形態】
【0007】
本発明の一実施形態によるナビゲーション装置の構成を図1に示す。このナビゲーション装置は、車両に搭載されており、通常の地図を基に道路形状などを簡略化することにより、通常の地図を要約した地図(以下、要約地図という)を作成し表示するものである。図1のナビゲーション装置1は、制御回路11、ROM12、RAM13、現在地検出装置14、画像メモリ15、表示モニタ16、入力装置17、およびディスクドライブ18を有している。ディスクドライブ18には、地図データが記録されたDVD−ROM19が装填される。
【0008】
制御回路11は、マイクロプロセッサおよびその周辺回路からなり、RAM13を作業エリアとしてROM12に格納された制御プログラムを実行することにより、各種の処理や制御を行う。この制御回路11が後で説明するような要約地図作成処理を行うことによって、DVD−ROM19に記録された地図データに基づいて要約地図が作成され、表示モニタ16に表示される。
【0009】
現在地検出装置14は、自車両の現在地を検出する装置であり、たとえば、自車両の進行方向を検出する振動ジャイロ14a、車速を検出する車速センサ14b、GPS衛星からのGPS信号を検出するGPSセンサ14c等からなる。ナビゲーション装置1は、この現在地検出装置14により検出された自車両の現在地に基づいて、要約地図を作成する範囲や経路探索開始点などを決定するとともに、要約地図上にその現在地を表示する。
【0010】
画像メモリ15は、表示モニタ16に表示する画像データを格納する。この画像データは、要約地図を表示するための道路地図描画用データや各種の図形データ等からなり、それらは制御回路11の要約地図作成処理によって作成される。表示モニタ16は、制御回路11からの制御により、画像メモリ15に格納された画像データを用いて要約地図を画面表示しユーザに提供する。
【0011】
入力装置17は、ユーザが目的地や経由地(以下、これらを合わせて単に目的地という)を設定したりするための各種入力スイッチを有し、これは操作パネルやリモコンなどによって実現される。ユーザは、表示モニタ16に表示される画面指示に従って入力装置17を操作することにより、地名や地図上の位置を指定して目的地を設定することができる。
【0012】
ディスクドライブ18は、要約地図を作成するための地図データを、装填されたDVD−ROM19より読み出す。この地図データには、目的地までの推奨経路を演算するために用いられる経路計算データや、交差点名称、道路名称など、推奨経路に従って自車両を目的地まで誘導するために用いられる経路誘導データ、道路を表す道路データ、さらには河川や鉄道、地図上の各種施設(ランドマーク)など、道路以外の地図形状を表す背景データなどが含まれている。
【0013】
道路データにおいて、道路区間を表す最小単位はリンクと呼ばれており、各道路は複数のリンクによって構成されている。リンク同士を接続している点、すなわち各リンクの端点はノードと呼ばれ、このノードはそれぞれに位置情報(座標情報)を有している。このノードの位置情報によって、リンク形状、すなわち道路の形状が決定される。なお、複雑な道路形状を表現するために、必要に応じてリンクの途中に屈曲点または形状補間点と呼ばれる点が設定されることもある。以下の説明では、これらの点を全て合わせてノードと呼ぶこととする。
【0014】
上記のような道路データに対して、後で説明するような要約地図作成処理を実行することにより、要約地図が作成される。リンクのそれぞれには、道路の種別に関する情報(リンク種別)が設定されている。なお、ここではDVD−ROMを用いた例について説明しているが、DVD−ROM以外の他の記録メディア、たとえばCD−ROMやハードディスクなどより、地図データを読み出すこととしてもよい。
【0015】
ユーザにより前述のようにして目的地が設定されると、ナビゲーション装置1は、現在地検出装置14により検出された現在地を経路探索開始点として、目的地までの経路演算を前述の経路計算データに基づいて所定のアルゴリズムにより行う。こうして求められた推奨経路は、その表示形態、たとえば表示色などを変えることによって、他の道路とは区別して要約地図上に表される。これにより、ユーザは要約地図上の推奨経路を画面上で認識することができる。また、この推奨経路に従って自車両が走行できるよう、ナビゲーション装置1は、ユーザに対して画像や音声などによる進行方向指示を行うことにより、自車両を誘導する。このようにして、自車両を目的地まで案内する。
【0016】
制御回路11において実行される要約地図作成処理のフローチャートを図2に示す。ステップS10では、要約地図を作成する対象とする地図の範囲(要約対象範囲)を設定する。ここでは、たとえば自車位置から所定範囲内を要約対象範囲に設定する。
【0017】
ステップS20では、ステップS10で設定した要約対象範囲内にラウンドアバウトがあるか否かを判定することにより、要約対象範囲内においてラウンドアバウトの道路を抽出する。ラウンドアバウトは、環状交差点やロータリーなどとも呼ばれ、進入した車両は予め決められた一方向にのみ周回することを許される円形状の特殊な道路である。ラウンドアバウトであるか否かの判断は、予め地図データに設定されたリンク種別に基づいて行ってもよいし、あるいは道路形状から判断してもよい。要約対象範囲内にラウンドアバウトがある場合は、ステップS30へ進む。しかし、要約対象範囲内にラウンドアバウトがない場合は、以下に説明するようなステップS30とステップS40の処理を実行せずに、ステップS50へ進む。
【0018】
ステップS30では、ステップS20で要約対象範囲内にあると判定されたラウンドアバウトの道路形状に近似しており、そのラウンドアバウトを要約地図において置き換えるための図形(以下、近似図形と呼ぶ)を算出する。このとき、地図座標値を変数とする関数によって近似図形を表し、元のラウンドアバウトに最も近い形状となるような関数を導き出すことにより、近似図形の算出を行う。なお、近似図形を表す関数は、元の道路形状に基づいて最小二乗法などの最適化計算を用いることにより求められる。具体的には、以下に説明するようにして近似図形を表す関数を導き出す。
【0019】
ラウンドアバウトは、一般に円形や楕円形に近い形状をしていることが多いため、ラウンドアバウトの近似図形には円形または楕円形が用いられる。この近似図形を表す関数を下記の式(1)に示す。式(1)によって表される円形や楕円形の近似図形によりラウンドアバウトの部分を置き換えて要約地図を作成することで、ユーザは容易にラウンドアバウトの存在を要約地図上に認識できる。
(x−x0)2/a2+(y−y0)2/b2=1 ・・・(1)
【0020】
式(1)において、xとyは近似図形の地図座標値を表している。すなわち、式(1)の条件を満たす点(x,y)の軌跡を地図上に描画することにより、円形や楕円形の近似図形が表される。x0,y0,aおよびbはいずれも定数を表しており、これらの各定数の値は、式(1)によって描画される円形や楕円形が元の地図におけるラウンドアバウトの形状に最も近似するように決定される。なお、式(1)においてaとbが同一でなければ楕円形の近似図形となり、a=bのときには円形の近似図形となる。
【0021】
上記の各定数値の決定には、非線形最小二乗法と呼ばれる非線形関数の最適化計算の方法を用いることができる。すなわち、式(1)の軌跡と元のラウンドアバウトを構成する各ノード間との距離の二乗和を計算し、その値が最小となるような定数x0,y0,aおよびbを求めることにより、元の地図におけるラウンドアバウトに最も近似する円形または楕円形の近似図形が求められる。なお、座標(x0,y0)は近似図形の中心点を表すため、元のラウンドアバウトの中心点が分かれば、その座標値により定数x0とy0を決定してもよい。
【0022】
ステップS30では、以上説明したようにして式(1)の関数の各定数値を求めることにより、近似図形が算出される。
【0023】
なお、上記の説明では式(1)により表される円形や楕円形の近似図形としたが、それ以外の形状を近似図形とすることもできる。たとえば、長方形や正方形、トラックコース型、半円、角が丸い四角形、ひょうたん型、水滴型など、様々な図形を近似図形とすることができる。その場合、式(1)の代わりに、その近似図形に応じた関数が用いられる。さらに、複数種類の図形を選択可能とし、その中から元のラウンドアバウトに最も近いものを近似図形としてもよい。また、近似図形を表す関数の各定数値を求める際には、最小二乗法以外にも様々な最適化計算の方法を用いることができる。
【0024】
ステップS40では、ステップS20で見つけ出された要約対象範囲内のラウンドアバウトを、ステップS30で算出された近似図形に置き換える。このとき、必要に応じてラウンドアバウトに接続された道路を延長または短縮し、置き換えた後の近似図形と接続するようにする。
【0025】
ステップS50では、要約対象範囲内の道路形状を簡略化するデフォルメ処理を行う。このデフォルメ処理は、道路の交差角度をなるべく直交化するとともに、道なりに進む道路をなるべく直進化することによって行われる。その具体的な方法については後で説明する。なお、ステップS40でラウンドアバウトに置き換えられた近似図形については、式(1)を満たす範囲でデフォルメ処理を行うことにより、デフォルメ処理にもその形状が維持されるようにする。
【0026】
ステップS60では、ステップS50のデフォルメ処理によって作成された要約地図を表示モニタ16に表示する。その結果、ステップS40でラウンドアバウトに置き換えられた式(1)の近似図形と、ステップS50のデフォルメ処理によって形状を簡略化されたラウンドアバウト以外の道路とを含む要約地図が表示される。ステップS70では、ステップS60で表示した要約地図上に、自車位置および進行先方向の表示を行う。ステップS70を実行した後は、図2の処理フローを終了する。以上説明したようにして要約地図の作成処理が行われ、要約地図が表示される。
【0027】
図3は、上記のようにして作成された要約地図の例を示している。図3(a)は要約前の地図を表しており、符号20に示すラウンドアバウトの道路形状がそのまま地図上に表されている。図3(b)は要約後の地図を表しており、ラウンドアバウトが符号21に示す円形の近似図形によって置き換えられるとともに、他の道路形状についても形状が簡略化されている。
【0028】
次に、図2のステップS50で実行されるデフォルメ処理について説明する。デフォルメ処理では、前述のように道路の交差角度をなるべく直交化するとともに、道なりに進む道路をなるべく直進化することにより、道路形状を簡略化する。このような処理は直交・直線化処理と呼ばれる公知の処理手法によって実現される。直交・直線化処理の内容を以下に説明する。
【0029】
直交・直線化処理は、道路地図における各リンクの端点及び屈曲点を含む各ノードの位置を初期配置として設定し、所定の評価関数に基づいて各ノードを再配置する最適化処理ループをその評価関数の収束条件が満足されるまで繰り返すことにより行われる。上記の評価関数は、道路長の保存を示す第一の項と、道路の直交化を示す第二の項と、道路の直進化を示す第三の項とからなる。すなわち、(A)道路長をなるべく初期値のまま保存すること(道路長の保存)、(B)道路間の交差角度をなるべく直交化すること(道路の直交化)、(C)道なりに進む道路をなるべく直進化すること(道路の直進化)を最終目標に設定して、直交・直線化処理が行われる。
【0030】
具体的には、上記(A)で述べた道路長の保存を示す第一の項E1と、上記(B)で述べた道路の直交化を示す第二の項E2と、上記(C)で述べた道路の直進化を示す第三の項E3とからなる評価関数Eを、下記の式(2)のように設定する。この評価関数Eに基づいて、評価関数Eの値を最小とするようなE1、E2およびE3を求める最適化処理を行い、その結果にしたがって各リンクのノードや形状補間点を再配置する。これにより、直交・直線化処理が行われる。
E =E1+E2+E3 ・・・(2)
【0031】
直交・直進化処理のフローチャートを図4に示す。直交・直進化処理では、各リンクを構成する点(ノードおよび形状補間点)の初期配置を設定するための初期配置ステップS51と、式(2)の評価関数Eに基づいて各点を再配置するための再配置ステップS53と、再配置結果の収束判定を行うための収束判定ステップS54と、最適化処理ループステップS52とを実行する。
【0032】
初期配置ステップS51では、地図データに基づいて道路地図の初期形状を入力し、端点及び屈曲点を含むリンク上の各点の初期配置として設定する。再配置ステップS53では、式(2)において道路長の保存を示す第一の項E1と、道路の直交化を示す第二の項E2と、道路の直進化を示す第三の項E3とからなる上記の評価関数Eに基づいて、各ノードを再配置する。収束判定ステップS54では、所定の収束条件が満足されているかどうかの判定を行う。最適化処理ループステップS52では、収束判定ステップS54において収束条件が満足されると判定されるまで、上記の再配置ステップS53と収束判定ステップS54を繰り返す。
【0033】
上記の各ステップを実行することにより、道路長をなるべく初期値のまま保存しながら、道路間の交差角度をなるべく直交化し、道なりに進む道路をなるべく直進化することができる。ここで、道なりに進む道路とは交差点での直進性の高い道路を表すものとし、交差点での仰角差が最小となる組合せについて、その仰角差が小さい場合に直進性が高いと判断する。すなわち、直交・直進化処理は、評価関数Eに基づいてノードを再配置させながら、最適なノード配置を求める。これにより、複数の道路が複雑に交差するような形状であっても有効な変形を可能にしている。
【0034】
式(2)の評価関数Eを設定する際に、E1〜E3の各項は次のようにして設定される。道路長の保存を示す第一の項E1は、道路長をなるべく初期値のまま保存するように、例えば、道路長が初期値のときに最小となり、初期値との差が大きくなるほど増大する関数を設定する。
【0035】
道路の直交化を示す第二の項E2は、道路の交差角度をなるべく直交化するように、例えば、道路の交差角度が理想的な角度のときに最小となる関数を設定する。ここで、理想的な角度は初期角度を90度単位で正規化した値をとり、ノードのまわりでの交差角度の和が360度になる等のトポロジー保存条件が満足されない場合には、例えば、1/2の角度で正規化しなおす等の措置をとって、なるべくトポロジー保存条件が満足されるように設定する。
【0036】
道路の直進化を示す第三の項E3は、道なりに進む道路をなるべく直進化するように、交差点において直進性の高い道路の組合せについて、例えば、交差角度が180度のときに最小となる関数を設定する。交差点における直進性の判定では、例えば、仰角の差が最小となる組合せで、仰角の差が閾値以下となる場合に直進性が高いと判断する。この第三の項E3が示すように、直交・直進化処理では道路方向を正規化することでなく、道路をなるべく直交化することを目指している。そのため、最初の地図の向きによって結果が異なってしまうという問題を解決し、座標回転に依存しない変形を可能にしている。
【0037】
評価関数Eの各項E1、E2およびE3の具体的な設定方法を図5に示す。図5(a)は、道路長の保存を示す第一の項E1の設定方法を示している。第一の項E1は、ノード間を結ぶリンクの各々に対応する項の和として計算される。図5(b)は、道路の直交化を示す第二の項E2の設定方法を示している。第二の項E2は、隣接するリンク間の相対角度の各々に対応する項の和として計算される。図5(c)は、道路の直進化を示す第三の項E3の設定方法を示している。第三の項E3は、三本以上のリンクが接続するノードで直進すると判断されたリンク間の相対角度の各々に対応する項の和として計算される。
【0038】
なお、前述したように、第一の項E1は、例えば、リンク長が初期値のときに最小となる関数として設定される。第二の項E2は、例えば、相対角度が理想的な角度のときに最小となる関数として設定される。第三の項E3は、例えば、相対角度が180度のときに最小となる関数として設定される。
【0039】
上記のようにすることで、道路長の保存を示す第一の項E1と、道路の直交化を示す第二の項E2と、道路の直進化を示す第三の項E3とを総合的に評価できるようになる。その結果、道路地図全体をバランスよく、且つ、矛盾のないように変形させることが可能となる。
【0040】
また、道路の直進化を示す第三の項E3における各項の重み付け係数を道路幅に依存させて設定することにより、各項の重み付け係数を道路幅の広い場合には大きく、道路幅の狭い場合には小さく設定できる。このようにすることで、道路幅の広い道路の直進化を優先させたいといった要求の実現が可能になる。なお、各項の重み付け係数を設定する際には、道路幅の代わりに道路の種別等を用いて設定してもよいものとする。
【0041】
式(2)の評価関数Eを設定する際、更に、道路長の保存を示す第一の項と、道路の直交化を示す第二の項の重み付け係数と、道路の直進化を示す第三の項の重み付け係数をそれぞれ、最適化処理ループの反復回数に応じて変化させることにより、各項の優先度を反復ステップに応じて変化させてもよい。これにより、各項の優先度は反復ステップに応じて制御できるようになるため、道路長の保存と、道路の直交化と、道路の直進化とが矛盾する場合であっても、反復処理によって矛盾を解消することができ、有効なデフォルメ結果を得ることが可能となる。
【0042】
図6は、評価関数Eの各項E1、E2およびE3の係数を反復回数に応じて変化させた場合における反復回数と各項の大きさの変化の様子の一例を示している。図6において、(a)は道路長の保存を示す第一の項E1、(b)は道路の直交化を示す第二の項E2、(c)は道路の直進化を示す第三の項E3の反復回数に対する依存性をそれぞれ表す。この図は、第三の項E3の重み付け係数を一定に保ちながら、第一の項E1と第二の項E2の重み付け係数を反復係数に伴って減衰させ、さらに、第一の項E1を第二の項E2より急速に減衰させることを表している。すなわち、道路の直進化を最も優先させ、その次に道路の直交化と道路長の保存をこの順に優先させることを表している。このように、各項の重み付け係数を適切に変化させることにより、道路の直進化を最優先させ、道路の直交化を道路長の保存より優先させたいといった要求の実現も可能となる。
【0043】
以上説明したような直交・直線化処理を行うことにより、図2のステップS50においてデフォルメ処理が実行される。その結果、道路の形状が簡略化され、要約地図が作成される。
【0044】
以上説明した実施の形態によれば、次の作用効果が得られる。
(1)ラウンドアバウトのように予め定められた特殊な形状を有する道路を所定の要約対象範囲内において抽出し(ステップS20)、その道路に近似する近似図形を表す関数を導き出して(ステップS30)、その道路を導き出された関数によって表される近似図形に置き換える(ステップS40)。こうして置き換えられた近似図形を含む地図を表示モニタ16に表示する(ステップS60)。このようにしたので、ラウンドアバウトのような特殊な形状を有する道路の周辺の道路地図を分かりやすく表示することができる。
【0045】
(2)ステップS30において、ラウンドアバウトに近似する近似図形を表す関数として円形または楕円形を表す関数を導き出すこととした。このようにしたので、一般に円形や楕円形に近い形状をしているラウンドアバウトについて、適切な近似図形を求めることができる。
【0046】
(3)ステップS30において近似図形を表す関数を導き出すときに、最小二乗法を用いて関数の各定数の値を求めることとしたので、簡単かつ確実に各定数の値を求めることができる。
【0047】
(4)デフォルメ処理により要約対象範囲内の道路形状を簡略化し(ステップS50)、ラウンドアバウトに置き換えられた近似図形と、形状を簡略化された道路とを含む要約地図を表示する(ステップS60)こととしたので、より一層分かりやすい地図を表示することができる。
【0048】
上記の実施の形態では、特殊な形状を有する道路としてラウンドアバウトを例に説明したが、それ以外の道路について適用してもよい。たとえば、立体交差の側道などに適用することもできる。また、道路以外にも鉄道などに適用することとしてもよい。これらについても、上記に説明したのと同様の方法によって近似図形を表す関数を導き出して置き換えることができる。
【0049】
上記実施の形態では、ナビゲーション装置において、DVD−ROMなどの記憶メディアより地図データを読み出して要約地図を作成する例について説明しているが、本発明はこの内容には限定されない。たとえばパソコンやPDA(Personal Digital Assistance)、携帯電話など、ナビゲーション装置以外であっても、地図データに基づいて地図を生成し表示する各種の装置について適用可能である。また、携帯電話などによる無線通信を用いて、地図データを情報配信センターからダウンロードする通信ナビゲーション装置などにおいても、本発明を適用できる。この場合、上記に説明したような要約地図の作成処理を情報配信センターにおいて行い、その結果を情報配信センターから信号出力してナビゲーション装置へ配信するようにしてもよい。すなわち、情報配信センターは、要約地図を作成する装置と、その要約地図を外部へ信号出力する装置によって構成される。
【0050】
以上説明した各実施の形態や各種の変形例はあくまで一例であり、発明の特徴が損なわれない限り、本発明はこれらの内容に限定されない。
【0051】
上記の実施の形態では、自車位置検出手段を現在地検出装置14により設定し、その他の各手段を制御回路11の処理によって実現することとした。具体的には、地図範囲設定手段をステップS10、抽出手段をステップS20、導出手段をステップS30、置換手段をステップS40、デフォルメ手段をステップS50、表示制御手段をステップS60の各処理によって実現している。しかし、これはあくまで一例であり、発明を解釈する際、上記の各実施形態の記載事項と特許請求の範囲の記載事項の対応関係には何ら限定も拘束もされない。
【図面の簡単な説明】
【0052】
【図1】本発明の一実施形態によるナビゲーション装置の構成を示すブロック図である。
【図2】要約地図作成処理のフローチャートである。
【図3】作成された要約地図の例であり、(a)は要約前の地図、(b)は要約後の地図をそれぞれ表している。
【図4】直交・直進化処理のフローチャートである。
【図5】評価関数Eの各項E1、E2およびE3の具体的な設定方法である。
【図6】評価関数Eの各項E1、E2およびE3の係数を反復回数に応じて変化させた場合における反復回数と各項の大きさの変化の様子の一例を示した図である。
【符号の説明】
【0053】
1 ナビゲーション装置
11 制御回路
12 ROM
13 RAM
14 現在地検出装置
15 画像メモリ
16 表示モニタ
17 入力装置
18 ディスクドライブ
19 DVD−ROM
【特許請求の範囲】
【請求項1】
予め定められた特殊な形状を有する特殊形状道路を所定の地図範囲内から抽出する抽出手段と、
前記抽出手段により抽出された特殊形状道路に近似する近似図形を表す関数を導き出す導出手段と、
前記抽出手段により抽出された特殊形状道路を、前記導出手段により導き出された関数によって表される近似図形に置き換える置換手段と、
前記置換手段により置き換えられた近似図形を含む地図を表示モニタに表示する表示制御手段とを備えることを特徴とする地図生成装置。
【請求項2】
請求項1の地図生成装置において、
前記特殊形状道路にはラウンドアバウトが含まれ、
前記導出手段は、前記ラウンドアバウトに近似する近似図形を表す関数として、円形または楕円形を表す関数を導き出すことを特徴とする地図生成装置。
【請求項3】
請求項1または2の地図生成装置において、
前記導出手段は、前記近似図形を表す関数を導き出すときに、最小二乗法を用いて関数の各定数の値を求めることを特徴とする地図生成装置。
【請求項4】
請求項1〜3いずれか一項の地図生成装置において、
前記地図範囲内の道路形状を簡略化するデフォルメ手段をさらに備え、
前記表示制御手段は、前記置換手段により置き換えられた近似図形と、前記デフォルメ手段により形状を簡略化された道路とを含む要約地図を表示モニタに表示することを特徴とする地図生成装置。
【請求項5】
請求項1〜4いずれか一項の地図生成装置と、
自車位置を検出する自車位置検出手段と、
前記自車位置検出手段により検出された自車位置に基づいて前記地図範囲を設定する地図範囲設定手段とを備えることを特徴とする車載情報端末。
【請求項1】
予め定められた特殊な形状を有する特殊形状道路を所定の地図範囲内から抽出する抽出手段と、
前記抽出手段により抽出された特殊形状道路に近似する近似図形を表す関数を導き出す導出手段と、
前記抽出手段により抽出された特殊形状道路を、前記導出手段により導き出された関数によって表される近似図形に置き換える置換手段と、
前記置換手段により置き換えられた近似図形を含む地図を表示モニタに表示する表示制御手段とを備えることを特徴とする地図生成装置。
【請求項2】
請求項1の地図生成装置において、
前記特殊形状道路にはラウンドアバウトが含まれ、
前記導出手段は、前記ラウンドアバウトに近似する近似図形を表す関数として、円形または楕円形を表す関数を導き出すことを特徴とする地図生成装置。
【請求項3】
請求項1または2の地図生成装置において、
前記導出手段は、前記近似図形を表す関数を導き出すときに、最小二乗法を用いて関数の各定数の値を求めることを特徴とする地図生成装置。
【請求項4】
請求項1〜3いずれか一項の地図生成装置において、
前記地図範囲内の道路形状を簡略化するデフォルメ手段をさらに備え、
前記表示制御手段は、前記置換手段により置き換えられた近似図形と、前記デフォルメ手段により形状を簡略化された道路とを含む要約地図を表示モニタに表示することを特徴とする地図生成装置。
【請求項5】
請求項1〜4いずれか一項の地図生成装置と、
自車位置を検出する自車位置検出手段と、
前記自車位置検出手段により検出された自車位置に基づいて前記地図範囲を設定する地図範囲設定手段とを備えることを特徴とする車載情報端末。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2007−86462(P2007−86462A)
【公開日】平成19年4月5日(2007.4.5)
【国際特許分類】
【出願番号】特願2005−275624(P2005−275624)
【出願日】平成17年9月22日(2005.9.22)
【出願人】(591132335)株式会社ザナヴィ・インフォマティクス (745)
【Fターム(参考)】
【公開日】平成19年4月5日(2007.4.5)
【国際特許分類】
【出願日】平成17年9月22日(2005.9.22)
【出願人】(591132335)株式会社ザナヴィ・インフォマティクス (745)
【Fターム(参考)】
[ Back to top ]