
変位検出警報システム
【課題】風や反射光などの外乱の影響による誤検出を低減させ正確な変位量を検出することができる、安価で高精度な変位検出警報システムを提供すること。
【解決手段】再帰反射材を用いた1枚のターゲットに対して、異なる方向から複数の変位検出装置によって撮影することで、昼夜問わず外乱による誤検出を低減させることができる。さらに、変位検出装置で撮影した画像データと過去の計測データと気象データを統合することにより、気温の変化によるターゲットもしくは変位検出装置の変形や、両方の変形、降雨や風による変位の誤検出が発生しやすい場合でも、高確率で正しい判定が可能になる。また、各変位検出装置でデータを分散して保存することにより、変位検出装置が最後の1台になっても、計測を継続することが可能である。
【解決手段】再帰反射材を用いた1枚のターゲットに対して、異なる方向から複数の変位検出装置によって撮影することで、昼夜問わず外乱による誤検出を低減させることができる。さらに、変位検出装置で撮影した画像データと過去の計測データと気象データを統合することにより、気温の変化によるターゲットもしくは変位検出装置の変形や、両方の変形、降雨や風による変位の誤検出が発生しやすい場合でも、高確率で正しい判定が可能になる。また、各変位検出装置でデータを分散して保存することにより、変位検出装置が最後の1台になっても、計測を継続することが可能である。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、変位検出警報システムに関するものであり、特に土砂災害の危険個所において斜面の変位を定点観測する場合に用いられる装置に関するものである。
【背景技術】
【0002】
現在、自然災害の予測について関心が高まっている。その一つとして、生活環境や人命に甚大な被害をもたらすものとして土砂災害があげられる。土砂災害の発生は突発的なものが多いが、前兆現象を検知し、正確な発生時期を予測・警報し、被害を最小限にとどめることが重要である。斜面の土砂や岩塊が安定性を失い崩落する「崖崩れ(急傾斜地崩壊)」や地下水の影響やゲリラ豪雨、時には地震によって引き起こされる「地滑り」だけでなく、道路や鉄道等の建設による山の切取・盛土作業によっても誘発される災害からも身を守るためにも重要であると考えられる。
【0003】
特許文献1には、危険箇所の斜面に設置したターゲットを撮影して差分検知を行い、ANDフィルタリングにて危険性を判断し、ネットワークを通じてクライアント端末に地表面形状を表す画像データを送信する地表面監視システムが記載されている。
【0004】
また特許文献2には、サンプリングモアレ法を用いて、斜面に設置された2次元格子をカメラで撮影し、変位を求める装置が記載されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特許第3869780号明細書内
【特許文献2】特開2011−174874号明細書内
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら特許文献1や特許文献2では、斜面に設置したターゲットを1台の変位
検出装置で計測するため、風や振動、温度変化等外乱の影響を受けて、実際の変位とは異
なる変位量(誤検出)を得るという問題があった。
【0007】
本発明は、上記問題点を解決するために、外乱の影響による誤検出を減らし、安価で高精度な変位検出警報システムを提供することを目的としている。
【課題を解決するための手段】
【0008】
発明者らは、上記問題を解決するために検討した結果、斜面に設置したターゲットを、複数の変位検出装置を用いて異なる方向から撮影し、外乱の影響による誤検出を減らすことを見出した。また、誤検出があった場合は、過去の画像データや気象データをもとに判断することを見出した。
【0009】
即ち、本発明の変位検出警報システムは、斜面に設置した2次元模様をもつターゲットを、別の位置に設置した撮像素子で撮影し、その画像を用いてターゲットを設置した斜面の変位情報を検出する変位検出装置において、2次元格子が描かれたターゲットと、前記ターゲット1枚に対して、各々異なる位置に設置された複数の変位検出装置と、前記変位検出装置から得られた画像データを解析し変位データとする処理部と、前記変位検出装置を制御する制御部と、前記変位データと他の変位検出装置の変位データを蓄積する記録部と、前記変位検出装置同士が前記変位情報を送受信するための通信部と、前記変位データと前記記録部のデータをもとに所定のアルゴリズムによって変位量を検出して判断する判断部と、異常があった場合に警報を出す警報部、とを備えることを特徴とするものである。
【0010】
また、本発明の変位検出警報システムは、前記2次元格子ターゲットは白黒2色で印刷したものであることを特徴とするものである。
【0011】
また、本発明の変位検出警報システムは、前記2次元格子ターゲットとして、再帰反射材を用いることを特徴とするものである。
【0012】
また、本発明の変位検出警報システムは、前記撮像素子はモノクロームタイプであることを特徴とするものである。
【0013】
また、本発明の変位検出警報システムは、前記変位データと、変位検出装置から取り出された変位情報から所定のアルゴリズムによって変位情報を求め、当該変位情報によって警報を出すことを特徴とするものである。
【0014】
また、本発明の変位検出警報システムは、前記変位データと、変位検出装置から取り出された変位情報から所定のアルゴリズムによって変位情報と信頼度を決定し、当該変位情報と信頼度によって警報を出すことを特徴とするものである。
【0015】
また、本発明の変位検出警報システムは、各時刻毎に気象データを検出する気象センサを備えることを特徴とするものである。
【0016】
また、本発明の変位検出警報システムは、気象センサによって得られた気象データを含め、所定のアルゴリズムによって変位情報と信頼度を決定し、当該変位情報と信頼度によって警報を出すことを特徴とするものである。
【0017】
また、本発明の変位検出警報システムは、1台の変位検出装置で集約した結果出力やデータ蓄積をするだけでなく、通信部により接続された他の複数の変位検出装置と記録部に、検出情報と気象データを分散(複製)して記録できる機能を有することを特徴とするものである。
【0018】
また、本発明の変位検出警報システムは、斜面の崩落等により、変位検出警報システムの一部が壊れたり通信不能状態になった場合、壊れた装置だけをシステムから切り離すことを特徴とするものである。
【発明の効果】
【0019】
本発明によれば、再帰反射材を用いた1枚のターゲットに対して、異なる方向から複数の変位検出装置によって撮影することで、昼夜問わず外乱による誤検出を低減させることができる。さらに、変位検出装置で撮影した画像データと過去の計測データと気象データを統合することにより、気温の変化によるターゲットもしくは変位検出装置の変形や、両方の変形、降雨や風による変位の誤検出が発生しやすい場合でも、高確率で正しい判定が可能になる。また、各変位検出装置でデータを分散して保存することにより、変位検出装置が最後の1台になっても、計測を継続することが可能である。
【図面の簡単な説明】
【0020】
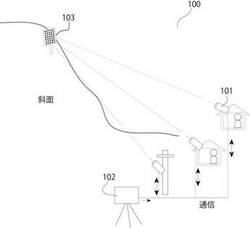
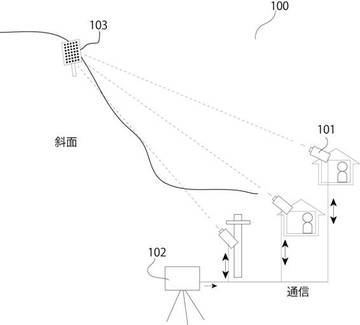
【図1】本発明の変位検出警報システムの全景を表す。
【図2】本発明に用いている変位検出装置の斜視図を表す。
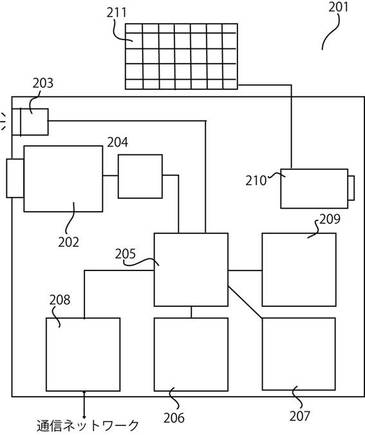
【図3】本発明に用いている変位検出装置の内部を表す。
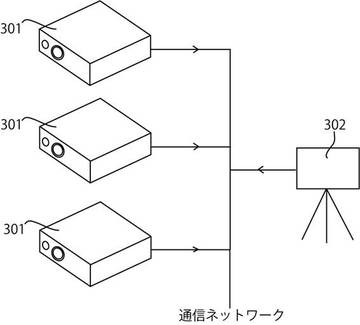
【図4】変位検出装置と気象センサの繋がりを表す。
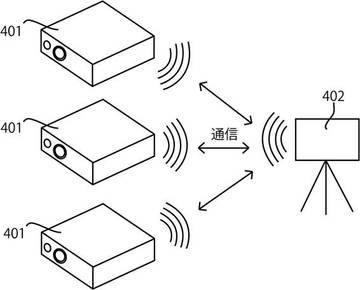
【図5】変位検出装置と気象センサの繋がり(無線の場合)を表す。
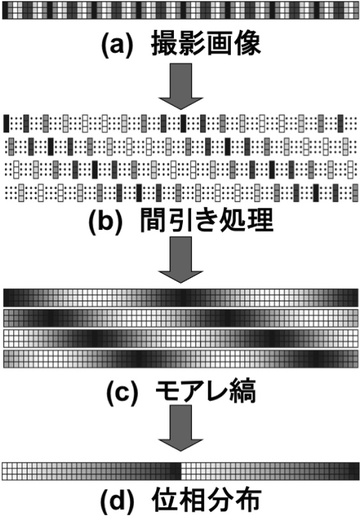
【図6】サンプリングモアレ法の位相解析位相算出原理を表す。
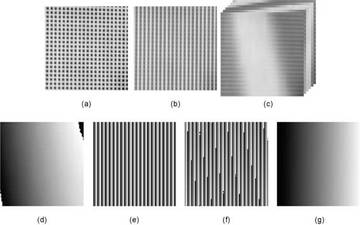
【図7】サンプリングモアレ法による位相解析の例を表す。
【発明を実施するための形態】
【0021】
以下、本発明の構造について図面を用いて説明する。
【0022】
図1は、本発明の変位検出警報システムの全景を表す図である。
変位検出警報システム100は、変位検出装置101と、気象センサ102と、ターゲット103と通信ネットワークを備えている。
【0023】
変位検出装置101は、離れた場所から崖の斜面に設置されたターゲット103を撮影し、異常があるかどうかを独自に判断する。また、後述する通信部を通じて通信ネットワーク上に当該情報を流し、他の装置と情報を共有する。変位検出装置101の設置場所は、例えば人家の窓辺や電柱などターゲット103が撮影できる場所に設置する。また、変位検出装置101は図2のように一体型であり、小型にすることができる。
【0024】
気象センサ102は、リアルタイムで天候や温度変化を記録する。気象センサ102に記録された気象データは、変位検出装置101から算出された処理結果と統合され、通信ネットワークを通じて、他の変位検出装置に共有される。
【0025】
ターゲット103は、崖の斜面に設置され、変位検出装置101によって撮影される。本発明ではターゲット103の素材として、再帰反射材を用いており、夜間の撮影が可能になる。また、ターゲット103はモノクロの2次元格子である。
【0026】
図3は、本発明で用いている変位検出装置の内部を表すブロック図である。変位検出装置201は、撮像素子202と、LED照明203と、処理部204と、制御部205と、判断部206と、記憶部207と、通信部208と、警報部209と、電池210と、太陽電池211とを備えている。
【0027】
撮像素子202は、崖の斜面に設置したターゲットを撮影する。本発明ではモノクロームタイプのカメラを用いる。モノクロームタイプを使用することで、高速に処理することができる。
【0028】
LED照明203は、夜間の撮影時に点灯させる。LEDを使用することで、節電することができ、小型の電池で長時間使用することができる。
【0029】
処理部204は、撮像素子202で撮影した画像データを所定のアルゴリズムを用いて位相解析をおこなう。
【0030】
制御部205は、変位検出装置201の中心となる部分である。制御部205から記憶部207、通信部208、警報部209と繋がっており、指令を出す。
【0031】
判断部206は、処理部204で位相解析された変位データを、自然の影響(例えば風など)による変位ではないかどうかを判断する。判断後、異常であれば警報部209から警報が鳴らされる。
【0032】
記憶部207は、処理部204で処理された変位データを各時刻毎に記録していく。記憶された変位データは、後述する通信部208を通じて通信ネットワーク上に配信され、他の変位検出装置と共有される。
【0033】
通信部208は、処理部204で処理された変位データや信頼度を通信ネットワーク上に配信する。このとき、通信部208は他の変位検出装置の変化量や、気象センサ102で観測された気象データも共有される。これ以外に、個々の変位検出装置を特定する情報(例えば識別IDや位置情報など)や、他の変位検出装置が警報を鳴らしているかどうかの情報も受信することができる。
【0034】
警報部209は、処理部204で処理された変位データや気象センサ102で観測された気象データ、記憶部207に蓄積された変位データをもとに、判断部206が異常と判断した時に、警報を鳴らす。
【0035】
電池210は変位検出装置201の動力源である。電池210は外付けの太陽電池211で充電することができる。
【0036】
以下、本発明の実施例を図1と図3を用いて説明する。ここでは変位検出装置を3台設置し、図4のように有線の場合を考える。
【0037】
計測対象となる崖の斜面にターゲット103を設置する。設置したターゲット103は、変位検出装置101によって撮影される。図1のように3台設置されているので、3つの角度から3種類撮影される。撮影された画像データは、処理部204に送られ、後述するサンプリングモアレ法によって位相解析を行い、所定のアルゴリズムによって変位量が算出される。変位量が算出された画像データは、制御部205を経て判断部206に送られ、風や建物の揺れや空気のゆらぎ等の影響で変位が検出されたのか、実際にターゲット103が変位したのかを判断する。変位量が算出された変位データは、記憶部207に保存される。記憶部207に保存された変位データは、次回以降撮影される画像データの参照に使用される。
【0038】
判断部206を経た変位データは、結果として通信部208を通じて他の変位検出装置に共有される。この通信部208を通じて通信ネットワーク上で共有された変位データと、気象センサ102の気象データ(天候や温度変化)が統合され、最終的な判断がなされる。判断部206によって崖崩れの危険性が判断された場合には、警報部209から警報が鳴らされる。
【0039】
変位検出装置は、変位データと気象データをもとにして、信頼度も判断する。
【0040】
各変位検出装置は、通信部208を通じて周りのデータを共有する。例えば、1台が警報を鳴らし始めた場合、装置各々が判断し警報を鳴らすようになる。また、変位データだけではなく、各変位検出装置を特定する情報(例えばID番号や位置情報)や、警報をならしているかどうかという情報も同時に共有される。
【0041】
ここまで有線の場合を説明してきたが、図5のように無線の場合も同じである。
【0042】
(判定のアルゴリズム)
まず、変位検出装置が異常かどうかを判定するアルゴリズムについて説明する。ここでは、記憶部には各時刻での変位(X, Y, Z )と、各方向成分の信頼度(SX, SY,
SZ )、気象データ(風速、風向、雨量、温度など)が記憶されているとし、通信回線から得られた他の変位検出装置のデータについても、同じ時刻のデータが記録されているとする。
【0043】
1台の変位検出装置単独で判定する場合は、数回の移動平均された変位と、現在の変位から信頼度を求める。信頼度の求め方の一例として、X方向について述べる。式(1)で示すように、過去N回の移動平均値Xaとの差を基準となる変位量DSで割ったものを信頼度SXとする。

(1)
急な変化があった時は、ノイズの可能性が高く信頼性が低いと判断し、同じ変位が継続して発生した場合は信頼性が高いということを意味する。式(1)の場合は、基準となる変位量DSの差が得られた場合に信頼度は「1」となる。また、別の例として、過去N回の標準偏差sXと標準偏差の基準値sSを用いて、式(2)で示すように信頼度SXを求める方法もある。
(2)
式(2)の場合は、過去N回の標準偏差sXが標準偏差の基準値sSよりも大きい場合は、ばらつきの大きい状態を意味しているので、変位があったとしても信頼度を低く見積もるという意味になる。このように、方向毎に変位の信頼度の値を求めてから、例えば次の式(3)で示すように評価値を求める。
(3)
式(3)から得られた評価値は、信頼度が全て「1」の場合は変化量(X方向,Y方向,Z方向の変位成分を合成した変位)を表す。変化量が小さいと、その方向の変位は小さいものとみなすという意味になる。このようにして得られた評価値Eが設定しておいた閾値E0よりも大きくなると、警報を発するように判定する。
【0044】
判定に気象センサのデータを加える方法の例を以下に説明する。
(4)
式(4)に示すように、評価値の算出時に、全体に係数Kをかけるようにする。例えば、風速が大きい時にはKの値を小さくするようにする。風速が大きい場合は、ターゲットの振動や空気のゆらぎによって発生する変位が大きくなるために信頼度を下げるという意味になる。同様に、雨量や温度変化などによってKの値を変化させることで、気象データを判定に加えることができる。
【0045】
複数の変位検出装置のデータを使用して判定する場合を説明する。ここでは、1番目からN番目までの計N個の変位検出装置の変位の大きさと信頼度が通信回線から得られるとし、i番目の変位検出装置から出力される変位の大きさと信頼度を、それぞれ(Xi, Yi,
Zi)、(Sxi, SYi, SZi,)とする。得られた位相に対して、その値と近い値を出力する別の変位検出装置が複数ある時には、単独で求めたSとは別の2番目の信頼度Rを高くし、そうでない時には信頼度Rを低くする。例えばX方向の場合、近いかどうかを決める閾値Tを設定しておき、 T > |X - Xi|のときにFXi
= 1とし、それ以外の場合はFXi = 0とする。FXi = 1となる場合の信頼度SxiとSxの平均値を求め、式(5)のように2番目の信頼度RXを求める。
(5)
このようにすると、他の変位検出装置から出力される変位の大きさのうち、閾値Tより近い値を出力する場合だけ評価値SXiを合計したことになり、変位検出器の総数N+1に対して閾値Tより近い値を出力する変位検出器の数が少ない場合は、2番目の信頼度RXは小さな値となる。逆に、多くの変位検出器が近い値を出力すると2番目の信頼度RXは大きな値となる。また、評価値SXiがある値より小さい場合は、式(4)の計算から除外するようにすると、評価値の低い出力を出す変位検出器の結果は2番目の信頼度RXには影響しないことになる。こうすることで、故障や取り付け向きが変わってしまう等の不具合が発生した変位検出器は自動的に除外されることになる。なお、Y方向とZ方向についても同様の手法で2番目の信頼度RYとRZをそれぞれ求める。
【0046】
このように、方向ごとに変位の2番目の信頼度の値を求めてから、例えば次の式(6)で示すように評価値Eを求める。
(6)
さらに、上述した式(4)と同様に、気象データによる係数Kをかけるようにしてもよい。
(7)
このようにして得られた評価値Eが、設定しておいた閾値E0よりも大きくなると警報を発するように判定する。
【0047】
(サンプリングモアレ法の原理)
次に、本発明の位相解析に用いているサンプリングモアレ法について説明する。サンプリングモアレ法とは、特開2011−174874号明細書内に記載されているように、撮影された格子画像に対して、サンプリング点およびサンプリング間隔を変えながら、得られる複数枚の位相シフトされたモアレ縞画像から位相分布を求める手法である。
【0048】
図6にサンプリングモアレ法による位相算出原理を表す。図6(a)は対象物表面に貼られた格子を撮影したときに得られる輝度値である。この段階ではモアレ縞を観察することができないが、基準格子のピッチ(基準ピッチ)に近い画素数(ここでは4画素を例とする)で間引き処理を行うと、図6(b)に示すようなモアレ縞を得ることができる。図6(b)の上から1番目の図は画像の左側から1番目のサンプリング点から4画素おきに間引くのに対して、上から2番目の図では画像の左側から2番目のサンプリング点から4画素おきに間引いている。このように間引く位置をずらしていくことで、モアレ縞の発生位置も変化していく。この処理は位相シフトに相当する。さらに図6(c)に示すように、欠落したデータに対して、近傍のデータを用いて線形補間を行えば、元の画像と同じ解像度のモアレ縞を得ることができる。図5では4画素で間引き処理を行っているが、撮影される格子のピッチに応じて間引きの画素数を決めることができる。位相シフト回数をN、位相シフト量が2πk /Nのときの輝度をIkとすると式(8)が導かれ、この関係式より位相値aを求めることができ、式(8)を適用して位相を求めることができる。また、振幅aは式(9)より求めることができる。
(8)
(9)
【0049】
このようにして得られる位相値は、間引き処理を行うことによって得られるモアレ縞の位相値である。モアレ縞の位相値θmは、元の格子の位相値θgと基準となる位相値θr(間引き処理のピッチを1周期とした場合の各画素の位相値)との差であるため、次の式(10)が成り立つ。
(10)
したがってここから、
(11)
となり、簡単に元の格子の位相値を求めることができる。
【0050】
図7にサンプリングモアレ法による2次元格子の位相解析の例(横方向の位相解析)を示す。2次元格子の場合は、まず始めに位相解析を行う方向(iまたはj方向)と垂直方向に平滑化処理を行う。平滑化の幅は、ピッチ以上の値とする。図7(a)に撮影された2次元格子を示す。図7(b)に縦方向に平滑化を行った後の画像を示す。図7(c)にそこから得られたサンプリングモアレ画像を示す。図7(d)は、(c)に対して式(8)を適用することによって得られたサンプリングモアレの位相分布を示す。図7(e)は、サンプリングを行う基準格子の位相分布を示す。図7(f)は、(d)と(e)から式(8)によって得られた格子の横成分の位相分布を示す。図7(g)は(f)を位相接続した位相分布を示す。このようにして、2次元格子であってもサンプリングモアレ法で格子の位相分布が得られることがわかる。
【0051】
以上、実施例を挙げて本発明を詳細に説明してきたが、本発明の特許請求の範囲から逸説しない限りにおいて、あらゆる変形や変更が可能であることは当業者に明らかである。例えば、変位検出装置の台数を増やすことで、より高精度な変位検出を行うことも可能である。したがって、本発明は上述した実施形態に限定されるものではない。
【符号の説明】
【0052】
100 変位検出警報システム
101、201、301、401 変位検出装置
102、302、402 気象センサ
103 ターゲット
202 撮像素子
203 LED照明
204 処理部
205 制御部
206 判断部
207 記憶部
208 通信部
209 警報部
210 電池
211 太陽電池
【技術分野】
【0001】
本発明は、変位検出警報システムに関するものであり、特に土砂災害の危険個所において斜面の変位を定点観測する場合に用いられる装置に関するものである。
【背景技術】
【0002】
現在、自然災害の予測について関心が高まっている。その一つとして、生活環境や人命に甚大な被害をもたらすものとして土砂災害があげられる。土砂災害の発生は突発的なものが多いが、前兆現象を検知し、正確な発生時期を予測・警報し、被害を最小限にとどめることが重要である。斜面の土砂や岩塊が安定性を失い崩落する「崖崩れ(急傾斜地崩壊)」や地下水の影響やゲリラ豪雨、時には地震によって引き起こされる「地滑り」だけでなく、道路や鉄道等の建設による山の切取・盛土作業によっても誘発される災害からも身を守るためにも重要であると考えられる。
【0003】
特許文献1には、危険箇所の斜面に設置したターゲットを撮影して差分検知を行い、ANDフィルタリングにて危険性を判断し、ネットワークを通じてクライアント端末に地表面形状を表す画像データを送信する地表面監視システムが記載されている。
【0004】
また特許文献2には、サンプリングモアレ法を用いて、斜面に設置された2次元格子をカメラで撮影し、変位を求める装置が記載されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特許第3869780号明細書内
【特許文献2】特開2011−174874号明細書内
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら特許文献1や特許文献2では、斜面に設置したターゲットを1台の変位
検出装置で計測するため、風や振動、温度変化等外乱の影響を受けて、実際の変位とは異
なる変位量(誤検出)を得るという問題があった。
【0007】
本発明は、上記問題点を解決するために、外乱の影響による誤検出を減らし、安価で高精度な変位検出警報システムを提供することを目的としている。
【課題を解決するための手段】
【0008】
発明者らは、上記問題を解決するために検討した結果、斜面に設置したターゲットを、複数の変位検出装置を用いて異なる方向から撮影し、外乱の影響による誤検出を減らすことを見出した。また、誤検出があった場合は、過去の画像データや気象データをもとに判断することを見出した。
【0009】
即ち、本発明の変位検出警報システムは、斜面に設置した2次元模様をもつターゲットを、別の位置に設置した撮像素子で撮影し、その画像を用いてターゲットを設置した斜面の変位情報を検出する変位検出装置において、2次元格子が描かれたターゲットと、前記ターゲット1枚に対して、各々異なる位置に設置された複数の変位検出装置と、前記変位検出装置から得られた画像データを解析し変位データとする処理部と、前記変位検出装置を制御する制御部と、前記変位データと他の変位検出装置の変位データを蓄積する記録部と、前記変位検出装置同士が前記変位情報を送受信するための通信部と、前記変位データと前記記録部のデータをもとに所定のアルゴリズムによって変位量を検出して判断する判断部と、異常があった場合に警報を出す警報部、とを備えることを特徴とするものである。
【0010】
また、本発明の変位検出警報システムは、前記2次元格子ターゲットは白黒2色で印刷したものであることを特徴とするものである。
【0011】
また、本発明の変位検出警報システムは、前記2次元格子ターゲットとして、再帰反射材を用いることを特徴とするものである。
【0012】
また、本発明の変位検出警報システムは、前記撮像素子はモノクロームタイプであることを特徴とするものである。
【0013】
また、本発明の変位検出警報システムは、前記変位データと、変位検出装置から取り出された変位情報から所定のアルゴリズムによって変位情報を求め、当該変位情報によって警報を出すことを特徴とするものである。
【0014】
また、本発明の変位検出警報システムは、前記変位データと、変位検出装置から取り出された変位情報から所定のアルゴリズムによって変位情報と信頼度を決定し、当該変位情報と信頼度によって警報を出すことを特徴とするものである。
【0015】
また、本発明の変位検出警報システムは、各時刻毎に気象データを検出する気象センサを備えることを特徴とするものである。
【0016】
また、本発明の変位検出警報システムは、気象センサによって得られた気象データを含め、所定のアルゴリズムによって変位情報と信頼度を決定し、当該変位情報と信頼度によって警報を出すことを特徴とするものである。
【0017】
また、本発明の変位検出警報システムは、1台の変位検出装置で集約した結果出力やデータ蓄積をするだけでなく、通信部により接続された他の複数の変位検出装置と記録部に、検出情報と気象データを分散(複製)して記録できる機能を有することを特徴とするものである。
【0018】
また、本発明の変位検出警報システムは、斜面の崩落等により、変位検出警報システムの一部が壊れたり通信不能状態になった場合、壊れた装置だけをシステムから切り離すことを特徴とするものである。
【発明の効果】
【0019】
本発明によれば、再帰反射材を用いた1枚のターゲットに対して、異なる方向から複数の変位検出装置によって撮影することで、昼夜問わず外乱による誤検出を低減させることができる。さらに、変位検出装置で撮影した画像データと過去の計測データと気象データを統合することにより、気温の変化によるターゲットもしくは変位検出装置の変形や、両方の変形、降雨や風による変位の誤検出が発生しやすい場合でも、高確率で正しい判定が可能になる。また、各変位検出装置でデータを分散して保存することにより、変位検出装置が最後の1台になっても、計測を継続することが可能である。
【図面の簡単な説明】
【0020】
【図1】本発明の変位検出警報システムの全景を表す。
【図2】本発明に用いている変位検出装置の斜視図を表す。
【図3】本発明に用いている変位検出装置の内部を表す。
【図4】変位検出装置と気象センサの繋がりを表す。
【図5】変位検出装置と気象センサの繋がり(無線の場合)を表す。
【図6】サンプリングモアレ法の位相解析位相算出原理を表す。
【図7】サンプリングモアレ法による位相解析の例を表す。
【発明を実施するための形態】
【0021】
以下、本発明の構造について図面を用いて説明する。
【0022】
図1は、本発明の変位検出警報システムの全景を表す図である。
変位検出警報システム100は、変位検出装置101と、気象センサ102と、ターゲット103と通信ネットワークを備えている。
【0023】
変位検出装置101は、離れた場所から崖の斜面に設置されたターゲット103を撮影し、異常があるかどうかを独自に判断する。また、後述する通信部を通じて通信ネットワーク上に当該情報を流し、他の装置と情報を共有する。変位検出装置101の設置場所は、例えば人家の窓辺や電柱などターゲット103が撮影できる場所に設置する。また、変位検出装置101は図2のように一体型であり、小型にすることができる。
【0024】
気象センサ102は、リアルタイムで天候や温度変化を記録する。気象センサ102に記録された気象データは、変位検出装置101から算出された処理結果と統合され、通信ネットワークを通じて、他の変位検出装置に共有される。
【0025】
ターゲット103は、崖の斜面に設置され、変位検出装置101によって撮影される。本発明ではターゲット103の素材として、再帰反射材を用いており、夜間の撮影が可能になる。また、ターゲット103はモノクロの2次元格子である。
【0026】
図3は、本発明で用いている変位検出装置の内部を表すブロック図である。変位検出装置201は、撮像素子202と、LED照明203と、処理部204と、制御部205と、判断部206と、記憶部207と、通信部208と、警報部209と、電池210と、太陽電池211とを備えている。
【0027】
撮像素子202は、崖の斜面に設置したターゲットを撮影する。本発明ではモノクロームタイプのカメラを用いる。モノクロームタイプを使用することで、高速に処理することができる。
【0028】
LED照明203は、夜間の撮影時に点灯させる。LEDを使用することで、節電することができ、小型の電池で長時間使用することができる。
【0029】
処理部204は、撮像素子202で撮影した画像データを所定のアルゴリズムを用いて位相解析をおこなう。
【0030】
制御部205は、変位検出装置201の中心となる部分である。制御部205から記憶部207、通信部208、警報部209と繋がっており、指令を出す。
【0031】
判断部206は、処理部204で位相解析された変位データを、自然の影響(例えば風など)による変位ではないかどうかを判断する。判断後、異常であれば警報部209から警報が鳴らされる。
【0032】
記憶部207は、処理部204で処理された変位データを各時刻毎に記録していく。記憶された変位データは、後述する通信部208を通じて通信ネットワーク上に配信され、他の変位検出装置と共有される。
【0033】
通信部208は、処理部204で処理された変位データや信頼度を通信ネットワーク上に配信する。このとき、通信部208は他の変位検出装置の変化量や、気象センサ102で観測された気象データも共有される。これ以外に、個々の変位検出装置を特定する情報(例えば識別IDや位置情報など)や、他の変位検出装置が警報を鳴らしているかどうかの情報も受信することができる。
【0034】
警報部209は、処理部204で処理された変位データや気象センサ102で観測された気象データ、記憶部207に蓄積された変位データをもとに、判断部206が異常と判断した時に、警報を鳴らす。
【0035】
電池210は変位検出装置201の動力源である。電池210は外付けの太陽電池211で充電することができる。
【0036】
以下、本発明の実施例を図1と図3を用いて説明する。ここでは変位検出装置を3台設置し、図4のように有線の場合を考える。
【0037】
計測対象となる崖の斜面にターゲット103を設置する。設置したターゲット103は、変位検出装置101によって撮影される。図1のように3台設置されているので、3つの角度から3種類撮影される。撮影された画像データは、処理部204に送られ、後述するサンプリングモアレ法によって位相解析を行い、所定のアルゴリズムによって変位量が算出される。変位量が算出された画像データは、制御部205を経て判断部206に送られ、風や建物の揺れや空気のゆらぎ等の影響で変位が検出されたのか、実際にターゲット103が変位したのかを判断する。変位量が算出された変位データは、記憶部207に保存される。記憶部207に保存された変位データは、次回以降撮影される画像データの参照に使用される。
【0038】
判断部206を経た変位データは、結果として通信部208を通じて他の変位検出装置に共有される。この通信部208を通じて通信ネットワーク上で共有された変位データと、気象センサ102の気象データ(天候や温度変化)が統合され、最終的な判断がなされる。判断部206によって崖崩れの危険性が判断された場合には、警報部209から警報が鳴らされる。
【0039】
変位検出装置は、変位データと気象データをもとにして、信頼度も判断する。
【0040】
各変位検出装置は、通信部208を通じて周りのデータを共有する。例えば、1台が警報を鳴らし始めた場合、装置各々が判断し警報を鳴らすようになる。また、変位データだけではなく、各変位検出装置を特定する情報(例えばID番号や位置情報)や、警報をならしているかどうかという情報も同時に共有される。
【0041】
ここまで有線の場合を説明してきたが、図5のように無線の場合も同じである。
【0042】
(判定のアルゴリズム)
まず、変位検出装置が異常かどうかを判定するアルゴリズムについて説明する。ここでは、記憶部には各時刻での変位(X, Y, Z )と、各方向成分の信頼度(SX, SY,
SZ )、気象データ(風速、風向、雨量、温度など)が記憶されているとし、通信回線から得られた他の変位検出装置のデータについても、同じ時刻のデータが記録されているとする。
【0043】
1台の変位検出装置単独で判定する場合は、数回の移動平均された変位と、現在の変位から信頼度を求める。信頼度の求め方の一例として、X方向について述べる。式(1)で示すように、過去N回の移動平均値Xaとの差を基準となる変位量DSで割ったものを信頼度SXとする。
(1)
急な変化があった時は、ノイズの可能性が高く信頼性が低いと判断し、同じ変位が継続して発生した場合は信頼性が高いということを意味する。式(1)の場合は、基準となる変位量DSの差が得られた場合に信頼度は「1」となる。また、別の例として、過去N回の標準偏差sXと標準偏差の基準値sSを用いて、式(2)で示すように信頼度SXを求める方法もある。
(2)
式(2)の場合は、過去N回の標準偏差sXが標準偏差の基準値sSよりも大きい場合は、ばらつきの大きい状態を意味しているので、変位があったとしても信頼度を低く見積もるという意味になる。このように、方向毎に変位の信頼度の値を求めてから、例えば次の式(3)で示すように評価値を求める。
(3)
式(3)から得られた評価値は、信頼度が全て「1」の場合は変化量(X方向,Y方向,Z方向の変位成分を合成した変位)を表す。変化量が小さいと、その方向の変位は小さいものとみなすという意味になる。このようにして得られた評価値Eが設定しておいた閾値E0よりも大きくなると、警報を発するように判定する。
【0044】
判定に気象センサのデータを加える方法の例を以下に説明する。
(4)
式(4)に示すように、評価値の算出時に、全体に係数Kをかけるようにする。例えば、風速が大きい時にはKの値を小さくするようにする。風速が大きい場合は、ターゲットの振動や空気のゆらぎによって発生する変位が大きくなるために信頼度を下げるという意味になる。同様に、雨量や温度変化などによってKの値を変化させることで、気象データを判定に加えることができる。
【0045】
複数の変位検出装置のデータを使用して判定する場合を説明する。ここでは、1番目からN番目までの計N個の変位検出装置の変位の大きさと信頼度が通信回線から得られるとし、i番目の変位検出装置から出力される変位の大きさと信頼度を、それぞれ(Xi, Yi,
Zi)、(Sxi, SYi, SZi,)とする。得られた位相に対して、その値と近い値を出力する別の変位検出装置が複数ある時には、単独で求めたSとは別の2番目の信頼度Rを高くし、そうでない時には信頼度Rを低くする。例えばX方向の場合、近いかどうかを決める閾値Tを設定しておき、 T > |X - Xi|のときにFXi
= 1とし、それ以外の場合はFXi = 0とする。FXi = 1となる場合の信頼度SxiとSxの平均値を求め、式(5)のように2番目の信頼度RXを求める。
(5)
このようにすると、他の変位検出装置から出力される変位の大きさのうち、閾値Tより近い値を出力する場合だけ評価値SXiを合計したことになり、変位検出器の総数N+1に対して閾値Tより近い値を出力する変位検出器の数が少ない場合は、2番目の信頼度RXは小さな値となる。逆に、多くの変位検出器が近い値を出力すると2番目の信頼度RXは大きな値となる。また、評価値SXiがある値より小さい場合は、式(4)の計算から除外するようにすると、評価値の低い出力を出す変位検出器の結果は2番目の信頼度RXには影響しないことになる。こうすることで、故障や取り付け向きが変わってしまう等の不具合が発生した変位検出器は自動的に除外されることになる。なお、Y方向とZ方向についても同様の手法で2番目の信頼度RYとRZをそれぞれ求める。
【0046】
このように、方向ごとに変位の2番目の信頼度の値を求めてから、例えば次の式(6)で示すように評価値Eを求める。
(6)
さらに、上述した式(4)と同様に、気象データによる係数Kをかけるようにしてもよい。
(7)
このようにして得られた評価値Eが、設定しておいた閾値E0よりも大きくなると警報を発するように判定する。
【0047】
(サンプリングモアレ法の原理)
次に、本発明の位相解析に用いているサンプリングモアレ法について説明する。サンプリングモアレ法とは、特開2011−174874号明細書内に記載されているように、撮影された格子画像に対して、サンプリング点およびサンプリング間隔を変えながら、得られる複数枚の位相シフトされたモアレ縞画像から位相分布を求める手法である。
【0048】
図6にサンプリングモアレ法による位相算出原理を表す。図6(a)は対象物表面に貼られた格子を撮影したときに得られる輝度値である。この段階ではモアレ縞を観察することができないが、基準格子のピッチ(基準ピッチ)に近い画素数(ここでは4画素を例とする)で間引き処理を行うと、図6(b)に示すようなモアレ縞を得ることができる。図6(b)の上から1番目の図は画像の左側から1番目のサンプリング点から4画素おきに間引くのに対して、上から2番目の図では画像の左側から2番目のサンプリング点から4画素おきに間引いている。このように間引く位置をずらしていくことで、モアレ縞の発生位置も変化していく。この処理は位相シフトに相当する。さらに図6(c)に示すように、欠落したデータに対して、近傍のデータを用いて線形補間を行えば、元の画像と同じ解像度のモアレ縞を得ることができる。図5では4画素で間引き処理を行っているが、撮影される格子のピッチに応じて間引きの画素数を決めることができる。位相シフト回数をN、位相シフト量が2πk /Nのときの輝度をIkとすると式(8)が導かれ、この関係式より位相値aを求めることができ、式(8)を適用して位相を求めることができる。また、振幅aは式(9)より求めることができる。
(8)
(9)
【0049】
このようにして得られる位相値は、間引き処理を行うことによって得られるモアレ縞の位相値である。モアレ縞の位相値θmは、元の格子の位相値θgと基準となる位相値θr(間引き処理のピッチを1周期とした場合の各画素の位相値)との差であるため、次の式(10)が成り立つ。
(10)
したがってここから、
(11)
となり、簡単に元の格子の位相値を求めることができる。
【0050】
図7にサンプリングモアレ法による2次元格子の位相解析の例(横方向の位相解析)を示す。2次元格子の場合は、まず始めに位相解析を行う方向(iまたはj方向)と垂直方向に平滑化処理を行う。平滑化の幅は、ピッチ以上の値とする。図7(a)に撮影された2次元格子を示す。図7(b)に縦方向に平滑化を行った後の画像を示す。図7(c)にそこから得られたサンプリングモアレ画像を示す。図7(d)は、(c)に対して式(8)を適用することによって得られたサンプリングモアレの位相分布を示す。図7(e)は、サンプリングを行う基準格子の位相分布を示す。図7(f)は、(d)と(e)から式(8)によって得られた格子の横成分の位相分布を示す。図7(g)は(f)を位相接続した位相分布を示す。このようにして、2次元格子であってもサンプリングモアレ法で格子の位相分布が得られることがわかる。
【0051】
以上、実施例を挙げて本発明を詳細に説明してきたが、本発明の特許請求の範囲から逸説しない限りにおいて、あらゆる変形や変更が可能であることは当業者に明らかである。例えば、変位検出装置の台数を増やすことで、より高精度な変位検出を行うことも可能である。したがって、本発明は上述した実施形態に限定されるものではない。
【符号の説明】
【0052】
100 変位検出警報システム
101、201、301、401 変位検出装置
102、302、402 気象センサ
103 ターゲット
202 撮像素子
203 LED照明
204 処理部
205 制御部
206 判断部
207 記憶部
208 通信部
209 警報部
210 電池
211 太陽電池
【特許請求の範囲】
【請求項1】
斜面に設置した2次元模様をもつターゲットを、別の位置に設置した撮像素子で撮影し、その画像を用いてターゲットを設置した斜面の変位情報を検出する変位検出装置において、
2次元格子が描かれたターゲットと、
前記ターゲット1枚に対して、各々異なる位置に設置された複数の変位検出装置と、
前記変位検出装置から得られた画像データを解析し変位データとする処理部と、
前記変位検出装置を制御する制御部と、
前記変位データと他の変位検出装置の変位データを蓄積する記録部と、
前記変位検出装置同士が前記変位情報を送受信するための通信部と、
前記変位データと前記記録部のデータをもとに所定のアルゴリズムによって変位量を検出して判断する判断部と、
異常があった場合に警報を出す警報部、
とを備えた変位検出警報システム。
【請求項2】
前記2次元格子ターゲットは白黒2色で印刷したものであることを特徴とする、請求項1に記載の変位検出警報システム。
【請求項3】
前記2次元格子ターゲットとして、再帰反射材を用いることを特徴とする、請求項1に記載の変位検出警報システム。
【請求項4】
前記撮像素子はモノクロームタイプであることを特徴とする、請求項1に記載の変位検出警報システム。
【請求項5】
前記変位データと、変位検出装置から取り出された変位情報から所定のアルゴリズムによって変位情報を求め、当該変位情報によって警報を出すことを特徴とする、請求項1から4に記載の変位検出警報システム。
【請求項6】
前記変位データと、変位検出装置から取り出された変位情報から所定のアルゴリズムによって変位情報と信頼度を決定し、当該変位情報と信頼度によって警報を出すことを特徴とする、請求項1から4に記載の変位検出警報システム。
【請求項7】
各時刻毎に気象データを検出する気象センサを備えることを特徴とする、請求項1から4に記載の変位検出警報システム。
【請求項8】
気象センサによって得られた気象データを含め、所定のアルゴリズムによって変位情報と信頼度を決定し、当該変位情報と信頼度によって警報を出すことを特徴とする、請求項7に記載の変位検出警報システム。
【請求項9】
1台の変位検出装置で集約した結果出力やデータ蓄積をするだけでなく、通信部により接続された他の複数の変位検出装置と記録部に、検出情報と気象データを分散(複製)して記録できる機能を有することを特徴とする、請求項1または7〜8に記載の変位検出警報システム。
【請求項10】
斜面の崩落等により、変位検出警報システムの一部が壊れたり通信不能状態になった場合、壊れた装置だけをシステムから切り離すことを特徴とする、請求項1または7〜9に記載の変位検出警報システム。
【請求項1】
斜面に設置した2次元模様をもつターゲットを、別の位置に設置した撮像素子で撮影し、その画像を用いてターゲットを設置した斜面の変位情報を検出する変位検出装置において、
2次元格子が描かれたターゲットと、
前記ターゲット1枚に対して、各々異なる位置に設置された複数の変位検出装置と、
前記変位検出装置から得られた画像データを解析し変位データとする処理部と、
前記変位検出装置を制御する制御部と、
前記変位データと他の変位検出装置の変位データを蓄積する記録部と、
前記変位検出装置同士が前記変位情報を送受信するための通信部と、
前記変位データと前記記録部のデータをもとに所定のアルゴリズムによって変位量を検出して判断する判断部と、
異常があった場合に警報を出す警報部、
とを備えた変位検出警報システム。
【請求項2】
前記2次元格子ターゲットは白黒2色で印刷したものであることを特徴とする、請求項1に記載の変位検出警報システム。
【請求項3】
前記2次元格子ターゲットとして、再帰反射材を用いることを特徴とする、請求項1に記載の変位検出警報システム。
【請求項4】
前記撮像素子はモノクロームタイプであることを特徴とする、請求項1に記載の変位検出警報システム。
【請求項5】
前記変位データと、変位検出装置から取り出された変位情報から所定のアルゴリズムによって変位情報を求め、当該変位情報によって警報を出すことを特徴とする、請求項1から4に記載の変位検出警報システム。
【請求項6】
前記変位データと、変位検出装置から取り出された変位情報から所定のアルゴリズムによって変位情報と信頼度を決定し、当該変位情報と信頼度によって警報を出すことを特徴とする、請求項1から4に記載の変位検出警報システム。
【請求項7】
各時刻毎に気象データを検出する気象センサを備えることを特徴とする、請求項1から4に記載の変位検出警報システム。
【請求項8】
気象センサによって得られた気象データを含め、所定のアルゴリズムによって変位情報と信頼度を決定し、当該変位情報と信頼度によって警報を出すことを特徴とする、請求項7に記載の変位検出警報システム。
【請求項9】
1台の変位検出装置で集約した結果出力やデータ蓄積をするだけでなく、通信部により接続された他の複数の変位検出装置と記録部に、検出情報と気象データを分散(複製)して記録できる機能を有することを特徴とする、請求項1または7〜8に記載の変位検出警報システム。
【請求項10】
斜面の崩落等により、変位検出警報システムの一部が壊れたり通信不能状態になった場合、壊れた装置だけをシステムから切り離すことを特徴とする、請求項1または7〜9に記載の変位検出警報システム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−64680(P2013−64680A)
【公開日】平成25年4月11日(2013.4.11)
【国際特許分類】
【出願番号】特願2011−204249(P2011−204249)
【出願日】平成23年9月20日(2011.9.20)
【出願人】(504145283)国立大学法人 和歌山大学 (62)
【出願人】(000100931)アイレス電子工業株式会社 (2)
【Fターム(参考)】
【公開日】平成25年4月11日(2013.4.11)
【国際特許分類】
【出願日】平成23年9月20日(2011.9.20)
【出願人】(504145283)国立大学法人 和歌山大学 (62)
【出願人】(000100931)アイレス電子工業株式会社 (2)
【Fターム(参考)】
[ Back to top ]