
抵抗溶接制御装置
【課題】テーブル電極を使用する抵抗溶接制御装置において、母材の抵抗値を正確に算出することができる抵抗溶接制御装置を提供する。
【解決手段】本発明の抵抗溶接制御装置1は、溶接前に上部電極15をテーブル電極16の電圧検出線接続部16aに接触させて通電したときの電極基準抵抗値R1を算出する。母材を設置して上部電極15をテーブル電極16の溶接箇所へ移動させて接触させ加圧した状態で、テーブル電極16の電圧検出線接続部16aから溶接箇所までの距離が入力されて、電圧検出線接続部16aからの距離と抵抗値との関数から電極補正抵抗値Raを算出する。電極間に電力を供給して溶接を開始して電極間抵抗値R2を算出し、(母材抵抗値Rw)=(電極間抵抗値R2)−(電極基準抵抗値R1)−(電極補正抵抗値Ra)を算出する。この結果、母材Wの抵抗値を正確に算出することができる。
【解決手段】本発明の抵抗溶接制御装置1は、溶接前に上部電極15をテーブル電極16の電圧検出線接続部16aに接触させて通電したときの電極基準抵抗値R1を算出する。母材を設置して上部電極15をテーブル電極16の溶接箇所へ移動させて接触させ加圧した状態で、テーブル電極16の電圧検出線接続部16aから溶接箇所までの距離が入力されて、電圧検出線接続部16aからの距離と抵抗値との関数から電極補正抵抗値Raを算出する。電極間に電力を供給して溶接を開始して電極間抵抗値R2を算出し、(母材抵抗値Rw)=(電極間抵抗値R2)−(電極基準抵抗値R1)−(電極補正抵抗値Ra)を算出する。この結果、母材Wの抵抗値を正確に算出することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、上部電極と下部電極として働くテーブル電極との間に電力を供給して溶接を行うための抵抗溶接制御装置に関するものである。
【背景技術】
【0002】
従来、スポット溶接において、ナゲット径を適正化したり、散りの発生を防止したりするために、スポット溶接中の温度変化を母材の材質や板厚等に応じて適正化する適応制御が行われている。この適応制御では、溶接部の温度変化をリアルタイムに算出して溶接部の温度推定値を求めている。溶接部の温度変化を算出するためには、溶接電流値や溶接電圧値及び電極や母材の抵抗値等から溶接部の温度を推定している。(例えば、特許文献1参照。)。
【0003】
上部電極及び下部電極とも棒状の電極で形成されて、上下から母材を挟む標準的な抵抗溶接制御装置では、電極間に通電して検出された電流値と電圧値とから抵抗値を算出する場合、電極間に母材を設けないときの電極間を短絡させた無負荷状態の電極間抵抗値は、電極形状の状態が同じであればほぼ同じ抵抗値が算出され、この抵抗値を利用して上記の溶接部の温度を推定している。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特許第3221296号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上述した標準的な抵抗溶接制御装置とは別に、上下から母材を挟む一対の電極のうち上部電極は棒状の電極であって、下部電極が板状に形成されたテーブル電極が使用される抵抗溶接制御装置がある。これはテーブル電極の上に母材を置いて、上部電極のみを溶接箇所へ移動させて溶接を行うものであって、テーブル電極の表面のいずれの所も下部電極として働くことができ、下部電極を移動させる必要が無いという利点がある。
【0006】
しかし、テーブル電極を使用する抵抗溶接制御装置は、テーブル電極の一端に電圧検出線が接続されていて、この電圧検出線が接続されている電圧検出線接続部とテーブル電極の上部電極が接触している箇所との間の抵抗値を算出するために、電極形状の状態が同じであっても、電圧検出線接続部から溶接箇所までの距離が変わるので、無負荷時の短絡状態における算出された電極間抵抗値が変わる不具合があった。そのために、母材の抵抗値を正確に算出することができなかった。
【0007】
本発明は、テーブル電極を使用する抵抗溶接制御装置において、テーブル電極の電圧検出線接続部から溶接箇所までの距離が変わっても母材の抵抗値を正確に算出することができる抵抗溶接制御装置を提供することを目的としている。
【課題を解決するための手段】
【0008】
上述した課題を解決するために、請求項1の発明は、
上部電極と下部電極として働くテーブル電極との間に電力を供給する溶接電源と、
前記溶接電源の出力を制御する制御部とを備え、
前記制御部は、溶接前に前記上部電極が前記テーブル電極の電圧検出線接続部に移動させられて接触されて通電したときの電流及び電極基準電極間電圧を検出して、これらの検出値から電極基準抵抗値を算出し、溶接を行うとき前記上部電極と前記テーブル電極との間に母材が設置されて、前記上部電極が前記テーブル電極の溶接箇所へ移動させられて接触されて前記テーブル電極に加圧された状態で、前記テーブル電極の電圧検出線接続部から前記溶接箇所までの距離が入力されて、前記テーブル電極の電圧検出線接続部からの距離と抵抗値との関数から電極補正抵抗値を算出し、
前記溶接電源によって前記上部電極と前記テーブル電極との間に電力が供給されて溶接を開始し、溶接中の溶接電流と電極間電圧を検出し、これらの検出値から電極間抵抗値を算出し、(母材抵抗値)=(前記電極間抵抗値)−(前記電極基準抵抗値)−(前記電極補正抵抗値)を算出することを特徴とする抵抗溶接制御装置である。
【0009】
請求項2の発明は、
前記制御部は、前記電極基準抵抗値を算出した後に、前記上部電極を前記テーブル電極の前記電圧検出線接続部から予め定めた距離に接触させて通電したときの電流及び無負荷時電極間電圧を検出して、これらの検出値から無負荷時電極間抵抗値を算出し、前記関数を{(前記無負荷時電極間抵抗値)−(前記電極基準抵抗値)}÷(前記予め定めた距離)から設定することを特徴とする請求項1記載の抵抗溶接制御装置である。
【発明の効果】
【0010】
本発明の抵抗溶接制御装置は、上部電極と下部電極として働くテーブル電極との間に電力を供給する溶接電源と、溶接電源の出力を制御する制御部とを備え、電圧検出線接続部から溶接箇所までの距離が変わっても母材の抵抗値を正確に算出することができる。
【図面の簡単な説明】
【0011】
【図1】本発明の抵抗溶接制御装置1のブロック図である。
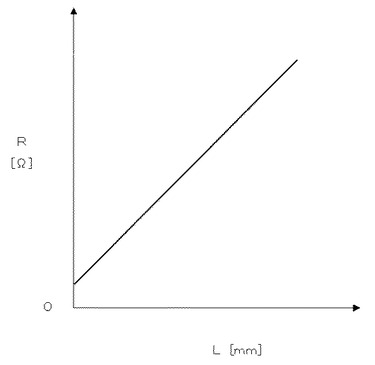
【図2】抵抗溶接制御装置1のテーブル電極16の電圧検出線接続部16aからの距離L[mm]と抵抗値R[Ω]との関数を示す図である。
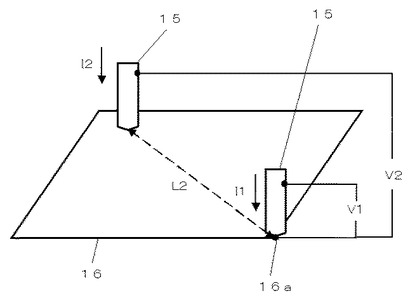
【図3】本発明の抵抗溶接制御装置1の動作を説明するための図である。
【発明を実施するための形態】
【0012】
[実施の形態1]
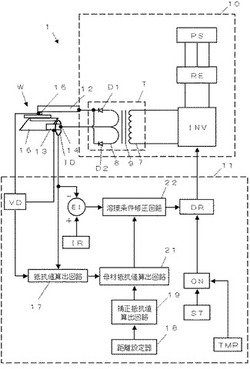
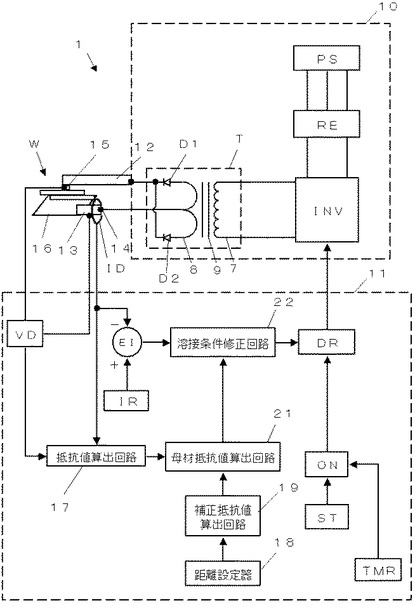
発明の実施の形態を実施例に基づき図面を参照して説明する。図1は本発明の抵抗溶接制御装置1のブロック図であり、図2は、抵抗溶接制御装置1のテーブル電極16の電圧検出線接続部16aからの距離L[mm]と抵抗値R[Ω]との関数を示す図であり、図3は、本発明の抵抗溶接制御装置1の動作を説明するための図である。図1において、抵抗溶接制御装置1は、交流電源PSによって発生される商用周波数の交流電力が整流回路REによって整流される。この整流回路REから出力された直流電力がインバータ回路INVに入力される。このインバータ回路INVは、図示を省略した複数のスイッチング素子から成るブリッジ回路から構成されていて、入力された直流電力が高周波のスイッチング動作によってパルス状の高周波交流電力に変換される。このインバータ回路INVのスイッチング動作は、後述するインバータ駆動回路DRからの制御信号によって制御される。
【0013】
溶接トランスTは、一次コイル7と二次コイル8とコア9とから成り、一次コイル7がインバータ回路INVの出力側に接続され、二次コイル8の出力端子が第1整流素子D1及び第2整流素子D2をそれぞれ介して上部アーム12に接続されるとともに、二次コイル8のセンタータップ14が下部アーム13に接続されている。上部アーム12及び下部アーム13の先端部に上部電極15及びテーブル電極16がそれぞれ取り付けられている。上部電極15は例えば溶接用ロボットの先端部に取り付けられている。
【0014】
インバータ回路INVから出力された高周波交流電力は、溶接トランスTの一次コイル7に印加され、溶接トランスTの二次コイル8には電圧が降圧された大電流の高周波交流電力が発生する。この二次コイル8に発生した高周波交流電力が第1整流素子D1及び第2整流素子D2によって半周期毎に交互に整流され、上部アーム12及び下部アーム13との間に直流電力が供給される。複数枚の母材Wが上部アーム12及び下部アーム13によって加圧されて直流電流が流れ、溶接部がジュール熱によって冶金的に接合される。
【0015】
二次電流検出器IDは溶接トランスTの二次側の電流である溶接電流を検出する。二次電流設定器IRは二次電流が設定され、電流誤差増幅回路EIは、二次電流検出器IDの検出信号と二次電流設定器IRの出力信号とを入力として、これらの誤差を増幅する。溶接時間設定器TMRは1回当たりの溶接時間を設定する。溶接開始回路STは、溶接を開始するときにHighレベルに成る信号を出力する。起動回路ONは溶接時間設定器TMRの出力信号と溶接開始回路STの出力信号とを入力として、溶接開始回路STの出力信号がHighレベルに成ってから溶接時間設定器TMRによって設定された時間だけHighレベルに成る信号を出力する。
【0016】
電極間電圧検出器VDは、上部電極15とテーブル電極16の電圧検出線接続部16aとの間の電極間電圧を検出する。抵抗値算出回路17は、二次電流検出器IDと電極間電圧検出器VDとの検出値を入力として、電極間の抵抗値を算出する。距離設定器18は、テーブル電極16の電圧検出線接続部16aから溶接箇所までの距離が、例えば図示を省略したロボット制御装置からの制御信号によって設定される。補正抵抗値算出回路19は、距離設定器18から距離設定値を入力して、テーブル電極16の電圧検出線接続部16aからの距離と抵抗値との関数から距離設定値に対応する電極補正抵抗値Raを算出する。この補正抵抗値算出回路19には、図2に示すテーブル電極16の電圧検出線接続部16aからの距離L[mm]と抵抗値R[Ω]との関数が保存されている。この関数は、テーブル電極16の材質を特定して距離L[mm]を変化させたときの抵抗値R[Ω]を測定して決定される。
【0017】
または上部電極15をテーブル電極16の電圧検出線接続部16aから予め定めた距離に接触させて通電したときの電流及び無負荷時電極間電圧を検出して、これらの検出値から無負荷時電極間抵抗値を算出し、関数を{(無負荷時電極間抵抗値)−(電極基準抵抗値R1)}÷(予め定めた距離)から設定してもよい。
【0018】
母材抵抗値算出回路21は、後述するように、抵抗値算出回路17から電極間抵抗値R2を入力し、(母材抵抗値Rw)=(電極間抵抗値R2)−(電極基準抵抗値R1)−(電極補正抵抗値Ra)を算出する。溶接条件修正回路22は、電流誤差増幅回路EIの出力信号と母材抵抗値算出回路21から母材抵抗値Rwとを入力して、さらに図示を省略したその他の溶接条件を入力して、熱伝導計算を利用したシミュレーションを用いて溶接部の温度変化を算出して溶接部の温度推定値を求める。この温度推定値に対応して溶接条件を修正して所望の溶接品質が得られるようにインバータ駆動回路DRへ制御信号を出力する。
【0019】
溶接電源10は、交流電源PS、整流回路RE、インバータ回路INV、溶接トランスT、第1整流素子D1及び第2整流素子D2からなる。また制御部11は、二次電流検出器ID、二次電流設定器IR、電流誤差増幅回路EI、溶接時間設定器TMR、溶接開始回路ST、起動回路ON、電極間電圧検出器VD、抵抗値算出回路17、距離設定器18、補正抵抗値算出回路19、母材抵抗値算出回路21及びインバータ駆動回路DRからなる。
【0020】
以下、動作を説明する。
(1)図3に示すように、溶接前に図示を省略した溶接用ロボットによって上部電極15をテーブル電極16の電圧検出線接続部16aまで移動させて接触させる。
(2)二次電流設定器IRに電極基準電流I1が設定されて、溶接電源10は上部電極15とテーブル電極16との間に電力を供給する。このときに二次電流検出器IDが電流を検出して、電極間電圧検出器VDが上部電極15とテーブル電極16の電圧検出線接続部16aとの間の電極基準電極間電圧V1を検出する。
(3)抵抗値算出回路17が二次電流検出器IDと電極間電圧検出器VDとの検出値を入力として、電極基準抵抗値R1を算出する。
【0021】
(4)溶接を行うときに上部電極15とテーブル電極16との間に母材Wが設置されて、図示を省略した溶接用ロボットによって上部電極15がテーブル電極16の溶接箇所へ移動させられて接触されて、上部電極15がテーブル電極16に加圧される。
(5)図示を省略したロボット制御装置からの制御信号によって、テーブル電極16の電圧検出線接続部16aから溶接箇所までの距離L2が距離設定器18に設定される。
(6)補正抵抗値算出回路19が距離設定器18から距離設定値を入力して、テーブル電極16の電圧検出線接続部16aからの距離と抵抗値との関数から距離L2に対応する電極補正抵抗値Raを算出する。
【0022】
(7)二次電流設定器IRに溶接電流I2が設定されて、溶接電源10は上部電極15とテーブル電極16の電圧検出線接続部16aとの間に電力を供給する。このときに二次電流検出器IDが溶接中の溶接電流を検出して、電極間電圧検出器VDが上部電極15とテーブル電極16の電圧検出線接続部16aとの間の電極間電圧V2を検出する。
(8)抵抗値算出回路17が二次電流検出器IDと電極間電圧検出器VDとの検出値を入力として、電極間抵抗値R2を算出する。
【0023】
(9)母材抵抗値算出回路21が抵抗値算出回路17から電極間抵抗値R2を入力し、(母材抵抗値Rw)=(電極間抵抗値R2)−(電極基準抵抗値R1)−(電極補正抵抗値Ra)を算出する。
(10)溶接条件修正回路22が、電流誤差増幅回路EIの出力信号と母材抵抗値算出回路21から母材抵抗値Rwとを入力して、さらに図示を省略したその他の溶接条件を入力して、熱伝導計算を利用したシミュレーションを用いて溶接部の温度変化を算出して溶接部の温度推定値を求める。この温度推定値に対応して溶接条件を修正して所望の溶接品質が得られるようにインバータ駆動回路DRを制御する。
【0024】
この結果、本発明の抵抗溶接制御装置1は、テーブル電極16の電圧検出線接続部16aから溶接箇所までの距離が変わっても母材の抵抗値Rwを正確に算出することができるので、この測定された抵抗値Rwを利用して、上述した適応制御や溶接部の入熱状態のモニタなどを適切に行うことができる。
【符号の説明】
【0025】
1 抵抗溶接制御装置
7 一次コイル
8 二次コイル
9 コア
10 溶接電源
11 制御部
12 上部アーム
13 下部アーム
14 センタータップ
15 上部電極
16 テーブル電極
16a 電圧検出線接続部
17 抵抗値算出回路
18 距離設定器
19 補正抵抗値算出回路
21 母材抵抗値算出回路
22 溶接条件修正回路
D1 第1整流素子
D2 第2整流素子
DR インバータ駆動回路
EI 電流誤差増幅回路
I1 電極基準電流
I2 溶接電流
ID 二次電流検出器
INV インバータ回路
IR 二次電流設定器
L 距離
L2 距離
ON 起動回路
PS 交流電源
R 抵抗値
R1 電極基準抵抗値
R2 電極間抵抗値
Ra 電極補正抵抗値
RE 整流回路
Rw 母材抵抗値
ST 溶接開始回路
T 溶接トランス
TMR 溶接時間設定器
V1 電極基準電極間電圧
V2 電極間電圧
VD 電極間電圧検出器
W 母材
【技術分野】
【0001】
本発明は、上部電極と下部電極として働くテーブル電極との間に電力を供給して溶接を行うための抵抗溶接制御装置に関するものである。
【背景技術】
【0002】
従来、スポット溶接において、ナゲット径を適正化したり、散りの発生を防止したりするために、スポット溶接中の温度変化を母材の材質や板厚等に応じて適正化する適応制御が行われている。この適応制御では、溶接部の温度変化をリアルタイムに算出して溶接部の温度推定値を求めている。溶接部の温度変化を算出するためには、溶接電流値や溶接電圧値及び電極や母材の抵抗値等から溶接部の温度を推定している。(例えば、特許文献1参照。)。
【0003】
上部電極及び下部電極とも棒状の電極で形成されて、上下から母材を挟む標準的な抵抗溶接制御装置では、電極間に通電して検出された電流値と電圧値とから抵抗値を算出する場合、電極間に母材を設けないときの電極間を短絡させた無負荷状態の電極間抵抗値は、電極形状の状態が同じであればほぼ同じ抵抗値が算出され、この抵抗値を利用して上記の溶接部の温度を推定している。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特許第3221296号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上述した標準的な抵抗溶接制御装置とは別に、上下から母材を挟む一対の電極のうち上部電極は棒状の電極であって、下部電極が板状に形成されたテーブル電極が使用される抵抗溶接制御装置がある。これはテーブル電極の上に母材を置いて、上部電極のみを溶接箇所へ移動させて溶接を行うものであって、テーブル電極の表面のいずれの所も下部電極として働くことができ、下部電極を移動させる必要が無いという利点がある。
【0006】
しかし、テーブル電極を使用する抵抗溶接制御装置は、テーブル電極の一端に電圧検出線が接続されていて、この電圧検出線が接続されている電圧検出線接続部とテーブル電極の上部電極が接触している箇所との間の抵抗値を算出するために、電極形状の状態が同じであっても、電圧検出線接続部から溶接箇所までの距離が変わるので、無負荷時の短絡状態における算出された電極間抵抗値が変わる不具合があった。そのために、母材の抵抗値を正確に算出することができなかった。
【0007】
本発明は、テーブル電極を使用する抵抗溶接制御装置において、テーブル電極の電圧検出線接続部から溶接箇所までの距離が変わっても母材の抵抗値を正確に算出することができる抵抗溶接制御装置を提供することを目的としている。
【課題を解決するための手段】
【0008】
上述した課題を解決するために、請求項1の発明は、
上部電極と下部電極として働くテーブル電極との間に電力を供給する溶接電源と、
前記溶接電源の出力を制御する制御部とを備え、
前記制御部は、溶接前に前記上部電極が前記テーブル電極の電圧検出線接続部に移動させられて接触されて通電したときの電流及び電極基準電極間電圧を検出して、これらの検出値から電極基準抵抗値を算出し、溶接を行うとき前記上部電極と前記テーブル電極との間に母材が設置されて、前記上部電極が前記テーブル電極の溶接箇所へ移動させられて接触されて前記テーブル電極に加圧された状態で、前記テーブル電極の電圧検出線接続部から前記溶接箇所までの距離が入力されて、前記テーブル電極の電圧検出線接続部からの距離と抵抗値との関数から電極補正抵抗値を算出し、
前記溶接電源によって前記上部電極と前記テーブル電極との間に電力が供給されて溶接を開始し、溶接中の溶接電流と電極間電圧を検出し、これらの検出値から電極間抵抗値を算出し、(母材抵抗値)=(前記電極間抵抗値)−(前記電極基準抵抗値)−(前記電極補正抵抗値)を算出することを特徴とする抵抗溶接制御装置である。
【0009】
請求項2の発明は、
前記制御部は、前記電極基準抵抗値を算出した後に、前記上部電極を前記テーブル電極の前記電圧検出線接続部から予め定めた距離に接触させて通電したときの電流及び無負荷時電極間電圧を検出して、これらの検出値から無負荷時電極間抵抗値を算出し、前記関数を{(前記無負荷時電極間抵抗値)−(前記電極基準抵抗値)}÷(前記予め定めた距離)から設定することを特徴とする請求項1記載の抵抗溶接制御装置である。
【発明の効果】
【0010】
本発明の抵抗溶接制御装置は、上部電極と下部電極として働くテーブル電極との間に電力を供給する溶接電源と、溶接電源の出力を制御する制御部とを備え、電圧検出線接続部から溶接箇所までの距離が変わっても母材の抵抗値を正確に算出することができる。
【図面の簡単な説明】
【0011】
【図1】本発明の抵抗溶接制御装置1のブロック図である。
【図2】抵抗溶接制御装置1のテーブル電極16の電圧検出線接続部16aからの距離L[mm]と抵抗値R[Ω]との関数を示す図である。
【図3】本発明の抵抗溶接制御装置1の動作を説明するための図である。
【発明を実施するための形態】
【0012】
[実施の形態1]
発明の実施の形態を実施例に基づき図面を参照して説明する。図1は本発明の抵抗溶接制御装置1のブロック図であり、図2は、抵抗溶接制御装置1のテーブル電極16の電圧検出線接続部16aからの距離L[mm]と抵抗値R[Ω]との関数を示す図であり、図3は、本発明の抵抗溶接制御装置1の動作を説明するための図である。図1において、抵抗溶接制御装置1は、交流電源PSによって発生される商用周波数の交流電力が整流回路REによって整流される。この整流回路REから出力された直流電力がインバータ回路INVに入力される。このインバータ回路INVは、図示を省略した複数のスイッチング素子から成るブリッジ回路から構成されていて、入力された直流電力が高周波のスイッチング動作によってパルス状の高周波交流電力に変換される。このインバータ回路INVのスイッチング動作は、後述するインバータ駆動回路DRからの制御信号によって制御される。
【0013】
溶接トランスTは、一次コイル7と二次コイル8とコア9とから成り、一次コイル7がインバータ回路INVの出力側に接続され、二次コイル8の出力端子が第1整流素子D1及び第2整流素子D2をそれぞれ介して上部アーム12に接続されるとともに、二次コイル8のセンタータップ14が下部アーム13に接続されている。上部アーム12及び下部アーム13の先端部に上部電極15及びテーブル電極16がそれぞれ取り付けられている。上部電極15は例えば溶接用ロボットの先端部に取り付けられている。
【0014】
インバータ回路INVから出力された高周波交流電力は、溶接トランスTの一次コイル7に印加され、溶接トランスTの二次コイル8には電圧が降圧された大電流の高周波交流電力が発生する。この二次コイル8に発生した高周波交流電力が第1整流素子D1及び第2整流素子D2によって半周期毎に交互に整流され、上部アーム12及び下部アーム13との間に直流電力が供給される。複数枚の母材Wが上部アーム12及び下部アーム13によって加圧されて直流電流が流れ、溶接部がジュール熱によって冶金的に接合される。
【0015】
二次電流検出器IDは溶接トランスTの二次側の電流である溶接電流を検出する。二次電流設定器IRは二次電流が設定され、電流誤差増幅回路EIは、二次電流検出器IDの検出信号と二次電流設定器IRの出力信号とを入力として、これらの誤差を増幅する。溶接時間設定器TMRは1回当たりの溶接時間を設定する。溶接開始回路STは、溶接を開始するときにHighレベルに成る信号を出力する。起動回路ONは溶接時間設定器TMRの出力信号と溶接開始回路STの出力信号とを入力として、溶接開始回路STの出力信号がHighレベルに成ってから溶接時間設定器TMRによって設定された時間だけHighレベルに成る信号を出力する。
【0016】
電極間電圧検出器VDは、上部電極15とテーブル電極16の電圧検出線接続部16aとの間の電極間電圧を検出する。抵抗値算出回路17は、二次電流検出器IDと電極間電圧検出器VDとの検出値を入力として、電極間の抵抗値を算出する。距離設定器18は、テーブル電極16の電圧検出線接続部16aから溶接箇所までの距離が、例えば図示を省略したロボット制御装置からの制御信号によって設定される。補正抵抗値算出回路19は、距離設定器18から距離設定値を入力して、テーブル電極16の電圧検出線接続部16aからの距離と抵抗値との関数から距離設定値に対応する電極補正抵抗値Raを算出する。この補正抵抗値算出回路19には、図2に示すテーブル電極16の電圧検出線接続部16aからの距離L[mm]と抵抗値R[Ω]との関数が保存されている。この関数は、テーブル電極16の材質を特定して距離L[mm]を変化させたときの抵抗値R[Ω]を測定して決定される。
【0017】
または上部電極15をテーブル電極16の電圧検出線接続部16aから予め定めた距離に接触させて通電したときの電流及び無負荷時電極間電圧を検出して、これらの検出値から無負荷時電極間抵抗値を算出し、関数を{(無負荷時電極間抵抗値)−(電極基準抵抗値R1)}÷(予め定めた距離)から設定してもよい。
【0018】
母材抵抗値算出回路21は、後述するように、抵抗値算出回路17から電極間抵抗値R2を入力し、(母材抵抗値Rw)=(電極間抵抗値R2)−(電極基準抵抗値R1)−(電極補正抵抗値Ra)を算出する。溶接条件修正回路22は、電流誤差増幅回路EIの出力信号と母材抵抗値算出回路21から母材抵抗値Rwとを入力して、さらに図示を省略したその他の溶接条件を入力して、熱伝導計算を利用したシミュレーションを用いて溶接部の温度変化を算出して溶接部の温度推定値を求める。この温度推定値に対応して溶接条件を修正して所望の溶接品質が得られるようにインバータ駆動回路DRへ制御信号を出力する。
【0019】
溶接電源10は、交流電源PS、整流回路RE、インバータ回路INV、溶接トランスT、第1整流素子D1及び第2整流素子D2からなる。また制御部11は、二次電流検出器ID、二次電流設定器IR、電流誤差増幅回路EI、溶接時間設定器TMR、溶接開始回路ST、起動回路ON、電極間電圧検出器VD、抵抗値算出回路17、距離設定器18、補正抵抗値算出回路19、母材抵抗値算出回路21及びインバータ駆動回路DRからなる。
【0020】
以下、動作を説明する。
(1)図3に示すように、溶接前に図示を省略した溶接用ロボットによって上部電極15をテーブル電極16の電圧検出線接続部16aまで移動させて接触させる。
(2)二次電流設定器IRに電極基準電流I1が設定されて、溶接電源10は上部電極15とテーブル電極16との間に電力を供給する。このときに二次電流検出器IDが電流を検出して、電極間電圧検出器VDが上部電極15とテーブル電極16の電圧検出線接続部16aとの間の電極基準電極間電圧V1を検出する。
(3)抵抗値算出回路17が二次電流検出器IDと電極間電圧検出器VDとの検出値を入力として、電極基準抵抗値R1を算出する。
【0021】
(4)溶接を行うときに上部電極15とテーブル電極16との間に母材Wが設置されて、図示を省略した溶接用ロボットによって上部電極15がテーブル電極16の溶接箇所へ移動させられて接触されて、上部電極15がテーブル電極16に加圧される。
(5)図示を省略したロボット制御装置からの制御信号によって、テーブル電極16の電圧検出線接続部16aから溶接箇所までの距離L2が距離設定器18に設定される。
(6)補正抵抗値算出回路19が距離設定器18から距離設定値を入力して、テーブル電極16の電圧検出線接続部16aからの距離と抵抗値との関数から距離L2に対応する電極補正抵抗値Raを算出する。
【0022】
(7)二次電流設定器IRに溶接電流I2が設定されて、溶接電源10は上部電極15とテーブル電極16の電圧検出線接続部16aとの間に電力を供給する。このときに二次電流検出器IDが溶接中の溶接電流を検出して、電極間電圧検出器VDが上部電極15とテーブル電極16の電圧検出線接続部16aとの間の電極間電圧V2を検出する。
(8)抵抗値算出回路17が二次電流検出器IDと電極間電圧検出器VDとの検出値を入力として、電極間抵抗値R2を算出する。
【0023】
(9)母材抵抗値算出回路21が抵抗値算出回路17から電極間抵抗値R2を入力し、(母材抵抗値Rw)=(電極間抵抗値R2)−(電極基準抵抗値R1)−(電極補正抵抗値Ra)を算出する。
(10)溶接条件修正回路22が、電流誤差増幅回路EIの出力信号と母材抵抗値算出回路21から母材抵抗値Rwとを入力して、さらに図示を省略したその他の溶接条件を入力して、熱伝導計算を利用したシミュレーションを用いて溶接部の温度変化を算出して溶接部の温度推定値を求める。この温度推定値に対応して溶接条件を修正して所望の溶接品質が得られるようにインバータ駆動回路DRを制御する。
【0024】
この結果、本発明の抵抗溶接制御装置1は、テーブル電極16の電圧検出線接続部16aから溶接箇所までの距離が変わっても母材の抵抗値Rwを正確に算出することができるので、この測定された抵抗値Rwを利用して、上述した適応制御や溶接部の入熱状態のモニタなどを適切に行うことができる。
【符号の説明】
【0025】
1 抵抗溶接制御装置
7 一次コイル
8 二次コイル
9 コア
10 溶接電源
11 制御部
12 上部アーム
13 下部アーム
14 センタータップ
15 上部電極
16 テーブル電極
16a 電圧検出線接続部
17 抵抗値算出回路
18 距離設定器
19 補正抵抗値算出回路
21 母材抵抗値算出回路
22 溶接条件修正回路
D1 第1整流素子
D2 第2整流素子
DR インバータ駆動回路
EI 電流誤差増幅回路
I1 電極基準電流
I2 溶接電流
ID 二次電流検出器
INV インバータ回路
IR 二次電流設定器
L 距離
L2 距離
ON 起動回路
PS 交流電源
R 抵抗値
R1 電極基準抵抗値
R2 電極間抵抗値
Ra 電極補正抵抗値
RE 整流回路
Rw 母材抵抗値
ST 溶接開始回路
T 溶接トランス
TMR 溶接時間設定器
V1 電極基準電極間電圧
V2 電極間電圧
VD 電極間電圧検出器
W 母材
【特許請求の範囲】
【請求項1】
上部電極と下部電極として働くテーブル電極との間に電力を供給する溶接電源と、
前記溶接電源の出力を制御する制御部とを備え、
前記制御部は、溶接前に前記上部電極が前記テーブル電極の電圧検出線接続部に移動させられて接触されて通電したときの電流及び電極基準電極間電圧を検出して、これらの検出値から電極基準抵抗値を算出し、溶接を行うとき前記上部電極と前記テーブル電極との間に母材が設置されて、前記上部電極が前記テーブル電極の溶接箇所へ移動させられて接触されて前記テーブル電極に加圧された状態で、前記テーブル電極の電圧検出線接続部から前記溶接箇所までの距離が入力されて、前記テーブル電極の電圧検出線接続部からの距離と抵抗値との関数から電極補正抵抗値を算出し、
前記溶接電源によって前記上部電極と前記テーブル電極との間に電力が供給されて溶接を開始し、溶接中の溶接電流と電極間電圧を検出し、これらの検出値から電極間抵抗値を算出し、(母材抵抗値)=(前記電極間抵抗値)−(前記電極基準抵抗値)−(前記電極補正抵抗値)を算出することを特徴とする抵抗溶接制御装置。
【請求項2】
前記制御部は、前記電極基準抵抗値を算出した後に、前記上部電極を前記テーブル電極の前記電圧検出線接続部から予め定めた距離に接触させて通電したときの電流及び無負荷時電極間電圧を検出して、これらの検出値から無負荷時電極間抵抗値を算出し、前記関数を{(前記無負荷時電極間抵抗値)−(前記電極基準抵抗値)}÷(前記予め定めた距離)から設定することを特徴とする請求項1記載の抵抗溶接制御装置。
【請求項1】
上部電極と下部電極として働くテーブル電極との間に電力を供給する溶接電源と、
前記溶接電源の出力を制御する制御部とを備え、
前記制御部は、溶接前に前記上部電極が前記テーブル電極の電圧検出線接続部に移動させられて接触されて通電したときの電流及び電極基準電極間電圧を検出して、これらの検出値から電極基準抵抗値を算出し、溶接を行うとき前記上部電極と前記テーブル電極との間に母材が設置されて、前記上部電極が前記テーブル電極の溶接箇所へ移動させられて接触されて前記テーブル電極に加圧された状態で、前記テーブル電極の電圧検出線接続部から前記溶接箇所までの距離が入力されて、前記テーブル電極の電圧検出線接続部からの距離と抵抗値との関数から電極補正抵抗値を算出し、
前記溶接電源によって前記上部電極と前記テーブル電極との間に電力が供給されて溶接を開始し、溶接中の溶接電流と電極間電圧を検出し、これらの検出値から電極間抵抗値を算出し、(母材抵抗値)=(前記電極間抵抗値)−(前記電極基準抵抗値)−(前記電極補正抵抗値)を算出することを特徴とする抵抗溶接制御装置。
【請求項2】
前記制御部は、前記電極基準抵抗値を算出した後に、前記上部電極を前記テーブル電極の前記電圧検出線接続部から予め定めた距離に接触させて通電したときの電流及び無負荷時電極間電圧を検出して、これらの検出値から無負荷時電極間抵抗値を算出し、前記関数を{(前記無負荷時電極間抵抗値)−(前記電極基準抵抗値)}÷(前記予め定めた距離)から設定することを特徴とする請求項1記載の抵抗溶接制御装置。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2013−75316(P2013−75316A)
【公開日】平成25年4月25日(2013.4.25)
【国際特許分類】
【出願番号】特願2011−216764(P2011−216764)
【出願日】平成23年9月30日(2011.9.30)
【出願人】(000000262)株式会社ダイヘン (990)
【公開日】平成25年4月25日(2013.4.25)
【国際特許分類】
【出願日】平成23年9月30日(2011.9.30)
【出願人】(000000262)株式会社ダイヘン (990)
[ Back to top ]