
振動発生装置の運転条件決定装置
【課題】振動発生機の特性を予め実験によって得ておかなくとも、所望の運転関連値を実現する運転条件を決定できる装置を提供する。
【解決手段】振動制御器22は、設定された励磁電流のもとで、供試体に所望の振動を与えるように、振動発生機1の駆動電流を制御する。運転関連値取得手段50は、制御が安定した時点における励磁コイル・駆動コイルの消費電力を取得する。励磁電流変更手段52は、制御が安定すると、励磁電流を微少値だけ変化させる。運転関連値取得手段50は、微小変化する励磁電流の各値に対する消費電力を取得することになる。変位点検出手段54は、運転関連値取得手段50が取得した一連の消費電力を観察し、その変位点を検出する。消費電力が徐々に減少し、その後増加に転じる点を変位点として見いだす。この変位点に対応する励磁電流を、運転条件として設定する。続いてブロア回転数を、フィードバック制御によって決定する。
【解決手段】振動制御器22は、設定された励磁電流のもとで、供試体に所望の振動を与えるように、振動発生機1の駆動電流を制御する。運転関連値取得手段50は、制御が安定した時点における励磁コイル・駆動コイルの消費電力を取得する。励磁電流変更手段52は、制御が安定すると、励磁電流を微少値だけ変化させる。運転関連値取得手段50は、微小変化する励磁電流の各値に対する消費電力を取得することになる。変位点検出手段54は、運転関連値取得手段50が取得した一連の消費電力を観察し、その変位点を検出する。消費電力が徐々に減少し、その後増加に転じる点を変位点として見いだす。この変位点に対応する励磁電流を、運転条件として設定する。続いてブロア回転数を、フィードバック制御によって決定する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、振動発生装置の運転条件を決定するための装置に関するものである。
【背景技術】
【0002】
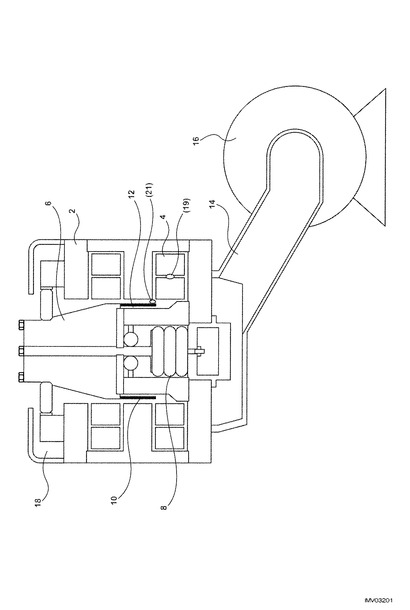
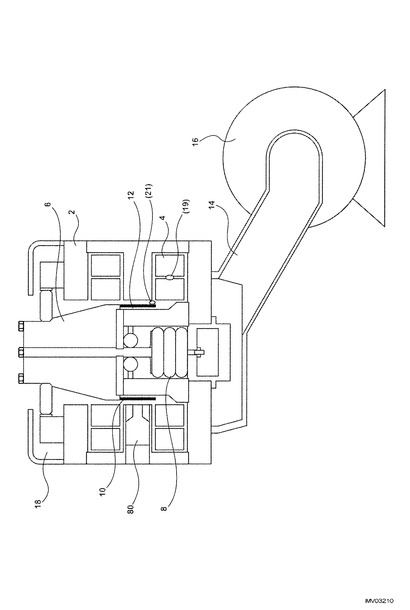
図1に、動電式振動発生機1の内部構造を示す。磁気回路2の内部には励磁コイル4が設けられている。中央部には、可動部6が、エアーサスペンション8によって、上下動可能なように保持されている。可動部6の上部は、振動試験を行う対象である供試体を固定できるようになっている。可動部6の下部には、駆動コイル10が設けられている。
【0003】
励磁コイル4に直流電流を流すことにより、空隙部12に直流磁場を形成する。この空隙部12に駆動コイル10が設けられており、駆動コイル10に交流電流を流すことによって、可動部6を上下に振動させる。これにより、可動部6の上部に取り付けた供試体を振動させる。
【0004】
なお、磁気回路2の下部にはダクト14が設けられ、その先には冷却ブロア16が取り付けられている。冷却ブロア16を回転させることにより、ダクト14を介して空気を吸引し、磁気回路2上部の空気孔18から空気を内部に導くことができる。これにより、励磁コイル4、駆動コイル10を冷却することができる。
【0005】
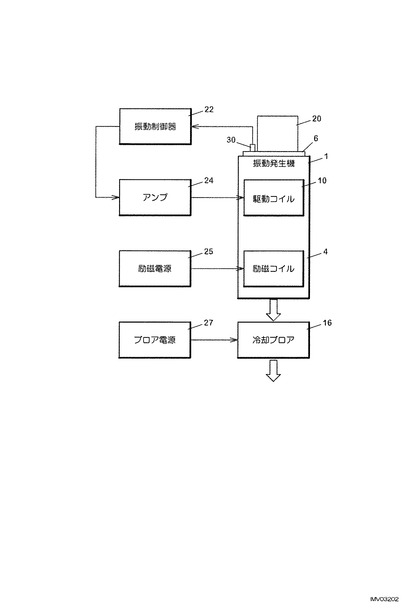
図2に、図1の振動発生機1を用いて構成した振動試験システムのブロック図を示す。振動発生機1の可動部6には供試体20が固定される。励磁コイル4に対しては、励磁電源25から励磁電流が供給される。冷却ブロア16に対しては、ブロア電源27から電流が供給される。供試体20に与えたい振動の周波数スペクトルを振動制御器22に設定する。振動制御器22からの駆動信号は、アンプ24によって増幅され、駆動コイル10に与えられる。これによる振動は、可動部6に設けられた加速度センサ30によって計測され、振動制御器22に与えられる。これを受けた振動制御器22は、計測された振動波形をフーリエ変換し、その周波数スペクトルを算出する。そして、振動波形の周波数スペクトルと、設定された所望の周波数スペクトルとの違いに基づいて、駆動信号の周波数スペクトルをより適切なものに修正する。そして、駆動信号の周波数スペクトルを逆フーリエ変換して、駆動信号を算出し、アンプ24に出力する。このようにして、目的とする周波数スペクトルを有する振動を、供試体20に与えることができる。
【0006】
なお、上記のように目的とする不規則振動の周波数スペクトルを与えて行う試験(ランダム振動試験)の他、固定した振動数の正弦波を与えて行う正弦波試験や周波数を時間的に掃引した正弦波振動を与えて行う試験(正弦波掃引試験)、や共振点追随試験、またこれらを複合した形の試験であるSOR(サイン・オン・ランダム試験)やROR(ランダム・オン・ランダム試験)、瞬間的に先鋭なパルス状の波形として表現された振動を与える試験(ショック試験)や実測波形を再現する試験なども行われている。
【0007】
発明者らは既に、このような振動試験システムにおいて、必要な加振力の大きさに応じて励磁電流を自動的に調整し、消費電力を最小化する装置を発明し実用化している。
【0008】
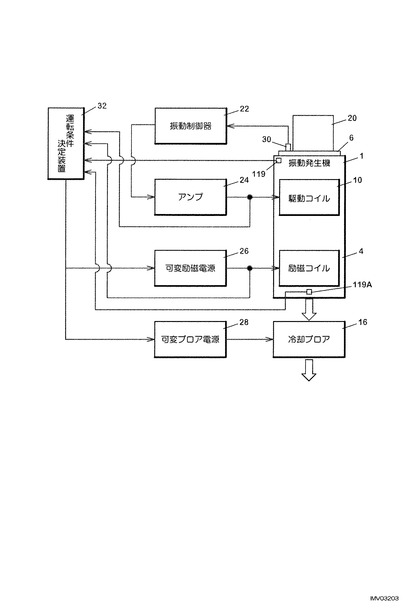
発明者らの取得した特許(特許文献1)に係る運転条件決定装置32を用いた振動試験システムの構成を図3に示す。振動制御器22は、目的とする周波数スペクトルを有する振動が供試体20に与えられるように、アンプ24を介して駆動コイル10に与える駆動信号を制御する。
【0009】
運転条件決定装置32は、アンプ24から出力され駆動コイル10に与えられる駆動電流および可変励磁電源26から出力される励磁電流を取得して、これらに基づいて目的に合致する好ましい運転条件を決定する。そして、振動制御器22によって制御され供試体20に所望の振動が与えられている状態にて、運転条件決定装置32は、決定した運転条件に到達するように、徐々に、可変励磁電源26、可変ブロア電源28を制御する。
【0010】
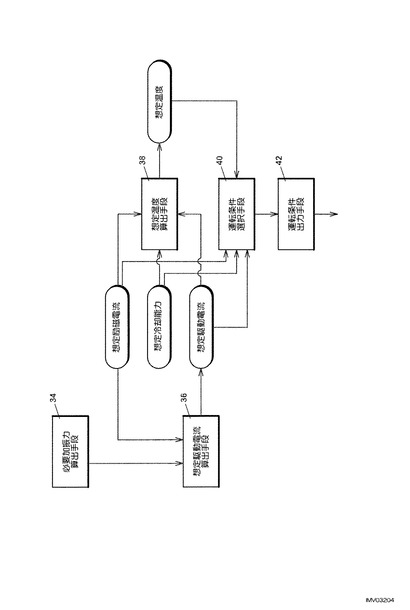
図4に、運転条件決定装置32の機能ブロック図を示す。振動発生機1の可動部に供試体20を装着し、標準の励磁電流を励磁コイル4に与え、振動制御器22によって、供試体20に所望の振動を与えるよう駆動コイル10に与える駆動電流を制御する。必要加振力算出手段34は、振動制御器22による制御が安定した時点で、前記の励磁電流および駆動電流を取得し、これらに基づいて、前記振動発生機1が発生している加振力を算出する。このようにして算出された加振力は、この振動発生機1を用いて、当該供試体20に対し前記所望の振動を与えようとした場合に、必要とされる加振力である。
【0011】
想定駆動電流算出手段36は、励磁電流の値を前記の標準励磁電流から変化させたとした場合に、それぞれの想定励磁電流において前記必要加振力を得るために必要な想定駆動電流を算出する。
【0012】
想定温度算出手段38は、冷却器の冷却能力を想定冷却能力にて動作させた場合に、それぞれの想定冷却能力のもとで、前記想定励磁電流を励磁コイル4に与えた場合の励磁コイルの想定温度、および想定駆動電流を駆動コイル10に与えた場合の駆動コイルの想定温度を算出する。想定温度算出手段38は、想定冷却能力を変えて、上記の想定温度の算出を行う。この想定温度は、冷却ブロア16の冷却空気流入口に設けた温度センサ119、空気排出口に設けた温度センサ119Aの計測値および温度モデルを用いて算出する。
【0013】
運転条件選択手段40は、想定励磁電流と想定冷却能力の複数の組み合わせのうち、当該組み合わせにて振動発生機1を運転させたとした場合に、励磁コイル4および駆動コイル10の想定温度が所定温度を超えず、かつ、消費電力が最小となるような組み合わせを運転条件として選択する。このようにして、消費電力などの運転関連値が所望の値となる運転条件を決定し、運転条件出力手段42は決定した条件にて振動試験システムを動作させる。
【先行技術文献】
【特許文献】
【0014】
【特許文献1】特許4231095
【発明の概要】
【発明が解決しようとする課題】
【0015】
上記従来の運転条件決定装置では、次のようにして所望の運転条件を決定していた。供試体20に所望の振動を与えるよう制御した際の、励磁電流および駆動電流に基づいて必要加振力を算出する。さらに、当該振動発生機1の特性に基づいて、励磁電流を様々に変化させたと想定した場合に、当該必要加振力を得るための駆動電流を計算する。このようにして、必要加振力を得るための励磁電流と駆動電流の組を複数算出し、これらのそれぞれについて消費電力を算出して、最も消費電力の小さい励磁電流・駆動電流を見いだす。そして、見いだした励磁電流にて振動試験システムを運転する。
【0016】
したがって、振動発生機1の特性として、励磁電流、駆動電流と加振力との関係が分かっていないと運転条件を決定することができないという問題があった。このため、予め、励磁電流・駆動電流を様々に変化させて実験を行い、励磁電流、駆動電流と加振力との関係を算出しておかなければならなかった。
【0017】
この発明は、上記のような問題点を解決して、振動発生機の特性を予め実験によって得ておかなくとも、所望の運転関連値を実現する運転条件を決定できる装置を提供することを目的とする。
【課題を解決するための手段】
【0018】
以下に、この発明の独立したいくつかの側面を列挙する。
【0019】
(1)この発明に係る運転条件決定装置は、静磁場を生成する励磁コイルと、前記励磁コイルによって生成された静磁場に設けられ、電磁力により駆動される駆動コイルと、前記駆動コイルの駆動力を供試体に伝えるための可動部と、を備えた振動発生機の運転条件を決定するための運転条件決定装置であって、可動部に供試体を装着し、所定の励磁電流を与え、供試体に所望の振動を与えるよう振動制御装置によって駆動電流を制御した場合における励磁コイルおよび駆動コイルの合計消費電力を取得する運転関連値取得手段と、前記励磁電流を順次減少させ、対応する合計消費電力の変化に基づいて、当該合計消費電力の極小値を見いだし、当該合計消費電力の極小値に対応する励磁電流を、少なくとも条件の一つとして含む運転条件を決定する運転条件決定手段とを備えている。
【0020】
したがって、振動発生機の特性を予め実験によって得ておかなくとも、励磁コイルおよび駆動コイルにおける消費電力を最小とした省電力運転のための運転条件を決定することができる。
【0021】
(2)この発明に係る運転条件決定装置は、静磁場を生成する励磁コイルと、前記励磁コイルによって生成された静磁場に設けられ、電磁力により駆動される駆動コイルと、前記駆動コイルの駆動力を供試体に伝えるための可動部と、を備えた振動発生機の運転条件を決定するための運転条件決定装置であって、可動部に供試体を装着し、所定の励磁電流を与え、供試体に所望の振動を与えるよう駆動電流を制御した場合における運転関連値を取得する運転関連値取得手段と、前記励磁電流を順次変化させ、対応する運転関連値の変化に基づいて、所望の運転関連値を見いだし、当該所望の運転関連値に対応する励磁電流を、少なくとも条件の一つとして含む運転条件を決定する運転条件決定手段とを備えている。
【0022】
したがって、振動発生機の特性を予め実験によって得ておかなくとも、所望の運転関連値を実現する運転条件を決定することができる。
【0023】
(3)この発明に係る運転条件決定装置は、運転関連値は、励磁コイルおよび駆動コイルにおける消費電力であり、所望の運転関連値は、最小の消費電力であることを特徴としている。
【0024】
したがって、励磁コイルおよび駆動コイルにおける消費電力を最小とした省電力運転のための運転条件を決定することができる。
【0025】
(4)この発明に係る運転条件決定装置は、励磁コイルまたは駆動コイルまたはその双方を冷却する冷却手段を備え、運転関連値は、励磁コイル、駆動コイルおよび冷却手段における消費電力であり、所望の運転関連値は、前記励磁コイルおよび駆動コイルがともに制限温度内にあることを前提とした、最小の消費電力であることを特徴としている。
【0026】
したがって、励磁コイル、駆動コイル、冷却手段における消費電力を最小とした省電力運転のための運転条件を決定することができる。
【0027】
(5)この発明に係る運転条件決定装置は、励磁コイルまたは駆動コイルまたはその双方を冷却する冷却手段を備え、運転関連値は、冷却手段の発する騒音であり、所望の運転関連値は、前記励磁コイルおよび駆動コイルがともに制限温度内にあることを前提とした、最小の騒音であることを特徴としている。
【0028】
したがって、最小の騒音を実現するための運転条件を決定することができる。
【0029】
(6)この発明に係る運転条件決定装置は、励磁コイルまたは駆動コイルまたはその双方を冷却する冷却手段を備え、運転条件決定手段は、励磁電流を決定した後、励磁コイルおよび駆動コイルの限界温度近傍の所定の温度を制限温度とし、励磁コイルの温度の制限温度に対する偏差と、駆動コイルの温度の制限温度に対する偏差との大きい方の偏差がゼロになるように、冷却手段の冷却能力を操作量としてフィードバック制御を行うことにより、冷却能力を運転条件の一つとして決定することを特徴としている。
【0030】
したがって、冷却能力を運転条件の一つとして決定することができる。
【0031】
(13)この発明に係る運転条件決定装置は、静磁場を生成する励磁コイルと、前記励磁コイルによって生成された静磁場に設けられ、電磁力により駆動される駆動コイルと、前記駆動コイルの駆動力を供試体に伝えるための可動部と、を備えた振動発生機の運転条件を決定するための運転条件決定装置であって、可動部に供試体を装着し、所定の励磁電流を与え、供試体に所望の振動を与えるよう駆動電流を制御した場合における運転関連値を取得する運転関連値取得手段と、前記運転関連値取得手段によって取得した運転関連値を表示する表示手段と、前記表示された運転関連値を見た操作者によって操作され、励磁電流を変動させる励磁電流変動手段とを備えている。
【0032】
したがって、操作者は、表示された運転関連値を観察しながら励磁電流を変化させ、所望の運転関連値を実現することができる。
【0033】
この発明において、「運転関連値」とは、振動発生機を運転させた際の振動発生機自体あるいはその周辺装置の諸特性をいい、実施形態では、励磁コイルおよび駆動コイルの消費電力、冷却ブロアの消費電力、冷却ブロアの騒音などがこれに該当する。
【0034】
「運転関連値取得手段」は、実施形態においては、図8のステップS4、S5などがこれに対応する。
【0035】
「運転条件」とは、振動発生機を運転させる際の振動発生機自体あるいはその周辺装置の運転の条件であり、実施形態では、励磁電流、ブロア回転数などがこれに該当する。
【0036】
「運転条件決定手段」は、実施形態においては、図8のステップS7〜S9や図9のステップS10〜S12などがこれに対応する。
【0037】
「励磁電流変更手段」は、実施形態においては、図8のステップS8がこれに対応する。
【0038】
「変位点検出手段」は、実施形態においては、図8のステップS7がこれに対応する。
【0039】
「フィードバック制御手段」は、実施形態においては、図9のステップS10〜S12がこれに対応する。
【0040】
「限界温度」とは、励磁コイルや駆動コイルがこれ以上の温度になると、焼損するおそれのある温度をいう。
【0041】
「プログラム」とは、CPUにより直接実行可能なプログラムだけでなく、ソース形式のプログラム、圧縮処理がされたプログラム、暗号化されたプログラム等を含む概念である。
【図面の簡単な説明】
【0042】
【図1】振動発生機の構造を示す図である。
【図2】振動試験システムの構成を示す図である。
【図3】従来の運転条件決定装置32を用いたシステムを示す図である。
【図4】従来の運転条件決定装置32の機能ブロック図である。
【図4a】消費電力に関する特性例を示すグラフである。
【図5】本発明の一実施形態による運転条件決定装置100を用いたシステムを示す図である。
【図6】運転条件決定装置100の機能ブロック図である。
【図7】一実施形態による運転条件決定装置のハードウエア構成を示す図である。
【図8】運転条件決定プログラム74のフローチャートである。
【図9】運転条件決定プログラム74のフローチャートである。
【図10】他の実施形態において、放射温度計80を用いた場合を示す図である。
【図11】他の実施形態による運転条件決定装置のハードウエア構成を示す図である。
【図12】図11の実施形態における表示例である。
【図13】他の実施形態による運転条件決定プログラム74のフローチャートである。
【図14】関係テーブルの一例を示す図である。
【発明を実施するための形態】
【0043】
1.第1の実施形態
<最小電力実現設定条件の決定に用いる原理>
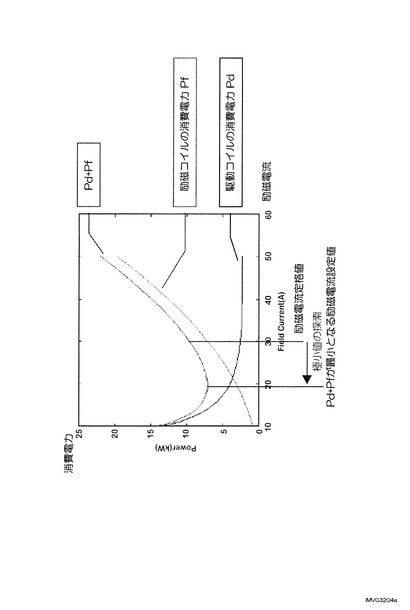
図4aは、動電式振動発生機の消費電力に関する一般特性を例示したものであって、ある一定の加振力を発生させるのに必要な励磁コイルにおける消費電力Pfと、駆動コイルにおける消費電力Pdとを、励磁電流設定値Ifの関数として示したものである。いま、励磁電流を定格励磁電流値に設定しておき、これを少しずつ小さくして行くことを考えると、ふたつのコイルでの消費電力の合計値(Pd+Pf)は単調に減少して行きある点で極小値をとることが分かる。従って、励磁電流をゆっくりと減少させながらコイルの消費電力の変化を観察すれば、振動発生機の特性を予め実験によって得ておかなくとも、この極小値を実現する励磁電流設定値を見つけることが可能である。この点では(Pd+Pf)の大きさがIfの設定可能範囲の中では最小となるので、この励磁電流設定値の下で冷却手段の消費電力Pbを許される範囲で最小の値に設定すれば、総消費電力(Pd+Pf+Pb)を最小に設定することが出来る。
【0044】
なおこのとき、冷却手段の消費電力Pbの可能な最小値の探索には、ブロア回転数を下げればコイル温度は単調増加することを利用し、ブロア回転数を操作量としコイル温度の制限値を目標値としてコイル温度をフィードバック制御する方法を採用することが出来る。これによって、振動発生機の熱的特性を予め実験によって得ておかなくとも、Pbの可能な最小値を決定することが出来る。
【0045】
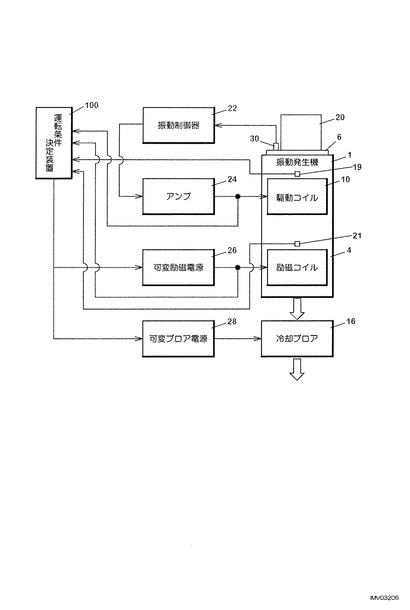
図5に、この発明の一実施形態による運転条件決定装置100を用いた振動試験システムを示す。振動制御器22(たとえばIMV株式会社のK2を用いることができる)は、目的とする周波数スペクトルを有する振動が供試体20に与えられるように、アンプ24を介して駆動コイル10に与える駆動信号を制御する。
【0046】
運転条件決定装置100は、可変励磁電源26を制御して励磁電流を変化させ、各励磁電流における駆動電流を計測し、運転関連値の変化を得る。この運転関連値の変化に基づいて、所望の運転関連値を実現する運転条件を特定する。
【0047】
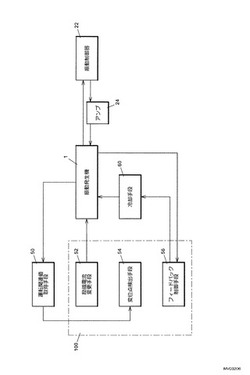
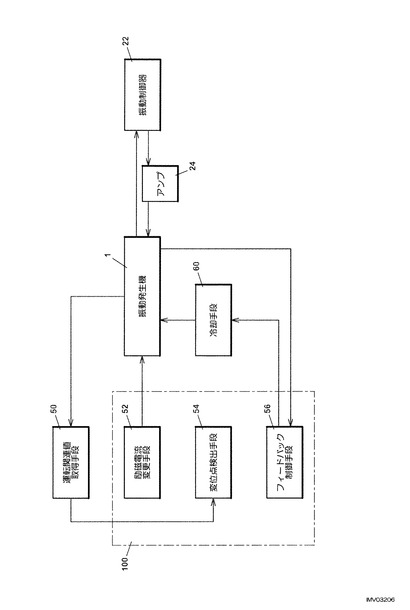
運転条件決定装置100の機能ブロック図を図6に示す。振動発生機1には、供試体20が載置されている。励磁電流変更手段52は、振動発生機1に与える励磁電流を変更するものである。振動制御器22は、設定された励磁電流のもとで、供試体20に所望の振動を与えるように、振動発生機1の駆動電流を制御する。運転関連値取得手段50は、振動制御器22による制御が安定した時点における運転関連値(たとえば、励磁コイル、駆動コイルの消費電力)を取得する。
【0048】
励磁電流変更手段52は、振動制御器22による制御が安定すると、励磁電流を微少値だけ変化させる。たとえば、定格励磁電流から始めて、0.1Aずつ減少させる。したがって、運転関連値取得手段50は、微小変化する励磁電流の各値に対する運転関連値を取得することになる。
【0049】
変位点検出手段54は、運転関連値取得手段50が取得した一連の運転関連値を観察し、その変位点を検出する。たとえば、消費電力を最小化する場合であれば、運転関連値として消費電力を観察し、消費電力が徐々に減少し、その後増加に転じる点を変位点として見いだす。この変位点に対応する励磁電流を、運転条件として設定する。
【0050】
フィードバック制御手段56は、冷却手段60の運転を制御し、振動発生機1の励磁コイルの限界温度および駆動コイルの限界温度よりやや低い温度を制限値として、フィードバック制御を行う。なお、フィードバック制御手段56は、励磁コイルまたは駆動コイルのうち、制限値に対する偏差の大きい方に注目して制御を行う。以上のようにして、フィードバック制御によって決定した冷却手段60の冷却能力を、運転条件として設定する。
【0051】
この実施形態では、励磁電流変更手段52、変位点検出手段54、フィードバック制御手段56により、運転条件決定手段100が構成されている。
【0052】
この実施形態において用いた振動発生機1は、図1に示す従来のものと同様である。ただし、励磁コイル4の温度を測定するための温度センサ19(熱電対または測温抵抗体など)、駆動コイル10の温度を計測するための温度センサ21(熱電対または測温抵抗体など)を設けている点が従来と異なる。
【0053】
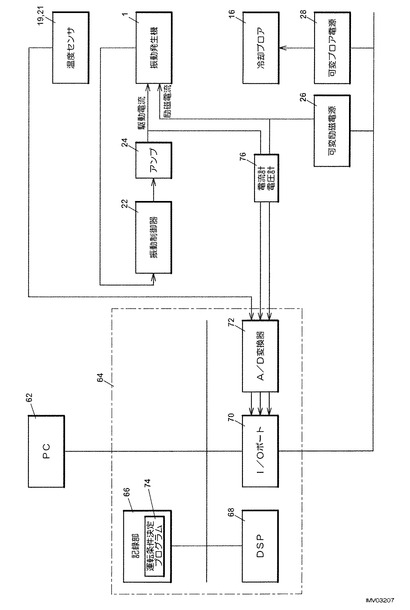
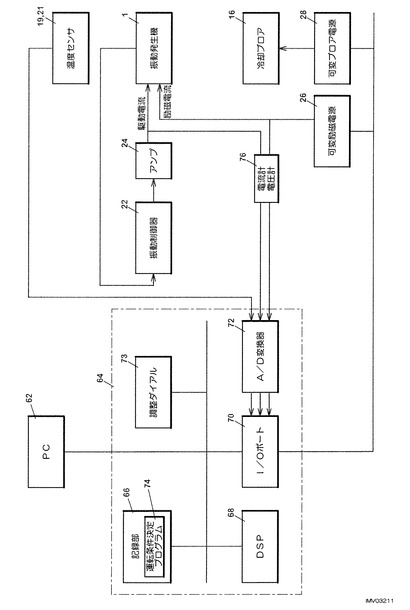
図7に、運転条件決定装置をDSPを用いて実現した場合のハードウエア構成を示す。PC62は、ディスプレイ、キーボード/マウス(図示せず)などを有しており、操作者の指令を受けたり、操作者に対する表示を行ったりする。PC62には、運転条件決定装置であるマスターコントローラ64が接続されている。
【0054】
マスターコントローラ64は、ディジタル・シグナル・プロセッサ(DSP)68を有している。DSP68には、記録部66、I/Oポート70が接続されている。記録部66には、運転条件決定プログラム74が記録されている。DSP68は、運転条件決定プログラム74にしたがって、I/Oポート70を介して、可変励磁電源26、可変ブロア電源28を制御する。なお、可変励磁電源26、可変ブロア電源28は、スイッチングコンバータを有しており、DSP68からの指令どおりの出力となるように制御を行う。したがって、可変励磁電源26により、振動発生機1に与える励磁電流を制御することができる。また、可変ブロア電源28により、冷却手段である冷却ブロア16の回転数を変化させ、冷却能力を制御することができる。
【0055】
励磁コイルの温度センサ19、駆動コイルの温度センサ21の出力は、A/D変換器72によってディジタルデータとされ、I/Oポート70を介して取り込まれる。また、駆動電流、駆動電圧、励磁電流、励磁電圧は、電流計/電圧計76によって計測され、A/D変換器72によってディジタルデータとされ、I/Oポート70を介して取り込まれる。
【0056】
振動制御器22は、設定されたスペクトルの振動が供試体20に与えられるように、アンプ24を介して駆動電流を制御する。
【0057】
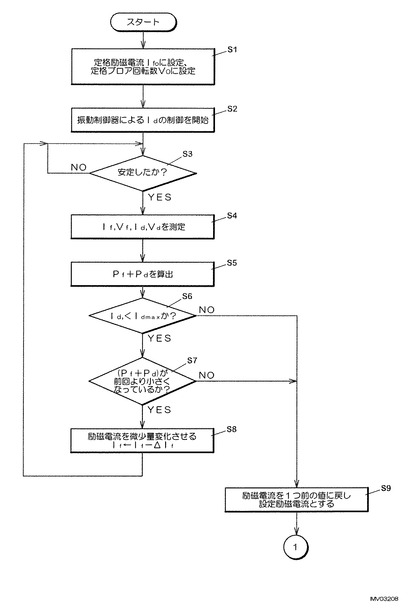
図8、図9に、運転条件決定プログラム74のフローチャートを示す。振動発生機1に供試体20を固定し、振動制御器22に目標とする振動のスペクトルを設定する。DSP68は、可変励磁電源26を制御して可変励磁電流を定格値If0(この実施形態では最大値)とし、可変ブロア電源28を制御して冷却ブロア16の回転数を定格値V0(この実施形態では最大値)とする(ステップS1)。
【0058】
次に、DSP68は、振動制御器22による駆動電流の制御を開始する(ステップS2)。DSP68は、振動制御器22による制御が安定したかどうかを判断する(ステップS3)。たとえば、所定時間経過により制御が安定すると仮定して判断してもよい。
【0059】
制御が安定したと判断すると、DSP68は、電流計/電圧計76の出力を取り込み、励磁電流If、励磁電圧Vf、駆動電流Id、駆動電圧Vdを測定する(ステップS4)。続いて、励磁コイルにおける消費電力Pfを励磁電流If、励磁電圧Vfに基づいて算出し、駆動コイルにおける消費電力Pdを駆動電流Id、駆動電圧Vdに基づいて算出する(ステップS5)。そして、合計消費電力をPf+Pdとして求める。なお、消費電力値を得るには、駆動電圧を測る代わりに、コイルの直流抵抗値と温度係数とを用いて、駆動電流実効値のみを測定して算出することも出来る。
【0060】
次に、DSP68は、駆動電流Idが、限界値Idmaxを超えているかどうかを判断する(ステップS6)。超えていれば、ステップS9に進む。超えていなければ、合計消費電力Pf+Pdが、前回より小さくなっているかどうかを判断する(ステップS7)。1回目は、前回の測定値がないので、ステップS8に進む。
【0061】
ステップS8において、DSP68は、励磁電流Ifを微少量減少させるよう、可変励磁電源26を制御する(ステップS8)。この実施形態では、0.1A減少させている。
【0062】
励磁電流Ifが減少すると、振動発生機1が供試体20に与える振動のスペクトルが変化し、所望のスペクトルから外れることになる。したがって、振動制御器22は、設定されたスペクトルを有する振動が供試体20に与えられるように、駆動電流Idを制御する。
【0063】
振動制御器22による制御が安定すると、DSP68は、励磁電流If、励磁電圧Vf、駆動電流Id、駆動電圧Vdを計測し(ステップS4)、合計消費電力Pf+Pdを算出する(ステップS5)。合計消費電力が前回のIfの時よりも小さくなっていれば、さらに励磁電流Ifを微少量減少させる(ステップS8)。
【0064】
これを繰り返し、合計消費電力が前回よりも小さくなっていれば、励磁電流Ifを減少させ続ける。DSP68は、合計消費電力が前回よりも大きくなっていた場合、ステップS7からステップS9に進む。この場合、前回の励磁電流の値Ifの時に合計消費電力が極小であったと推定できる。したがって、ステップS9において、DSP68は、前回の励磁電流の値Ifに戻すように、可変励磁電源26を制御する。このようにして、マスターコントローラ64は、合計消費電力が極小となる励磁電流Ifを見いだし、出力することができる。
【0065】
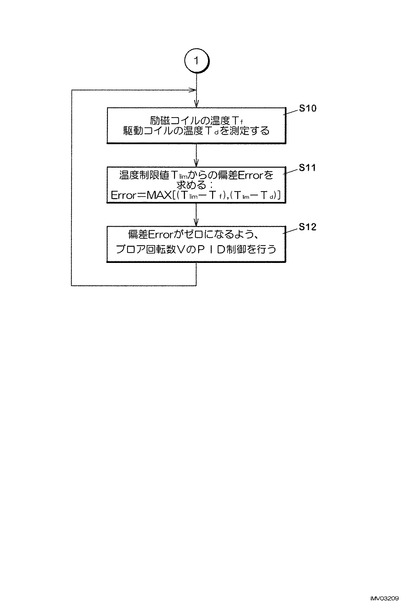
次に、DSP68は、励磁コイル4の温度センサ19、駆動コイル10の温度センサ21の出力を取り込み、励磁コイル4の温度Tf、駆動コイル10の温度Tdを計測する(ステップS10)。DSP68は、温度制限値Tlimからの励磁コイル4の温度Tfの偏差Df、温度制限値Tlimからの駆動コイル10の温度Tdの偏差Ddを算出する。そして、偏差Dfと偏差Ddの大きい方を選択する(ステップS11)。
【0066】
DSP68は、選択した偏差がゼロになるように、可変ブロア電源28により、冷却ブロア16の回転数をPID制御する(ステップS12)。ステップS10〜S12を繰り返すことにより、温度制限値Tlimになるように励磁コイル4あるいは駆動コイル10の温度が制御される。
【0067】
なお、この実施形態では、温度制限値Tlimは、励磁コイル4、駆動コイル10の温度限界値(コイルが焼き切れる可能性のある温度)よりも、やや低い温度(たとえば2度下)に設定している。
【0068】
冷却ブロア16は、回転数が少ないほど消費電力が小さくなるので、上記制御により、励磁コイル4、駆動コイル10の温度限界値の範囲内において、可変ブロア電源28に対して設定値を出力することにより、ほぼ最小のブロア消費電力を達成できる。
【0069】
以上のようにして、運転関連値としてのコイル及び冷却ブロアにおける消費電力を最小にすることができる。
【0070】
2.その他の実施形態
(1)上記実施形態では、温度センサとして熱電対または測温抵抗体を用いている。しかし、図10に示すように、振動発生機ボディ(磁気回路)に穴を開け、その内部に放射温度計80を収納して、駆動コイル10の温度を非接触にて計測するようにしてもよい。駆動コイル10に直接熱電対または測温抵抗体を付ける場合に比べ、振動が放射温度計80に与えられないので断線などの故障が少なくなるという利点がある。
【0071】
(2)また、励磁コイル、駆動コイルともに、その直流抵抗は温度係数を有している。したがって、直流抵抗を計測することで、その温度を知ることができる。このようにして温度を算出するようにしてもよい。なお、励磁コイル、駆動コイルの直流抵抗は、消費電力(実効値)を電流値(実効値)の自乗で割ることにより求めることができる。
【0072】
(3)あるいは、冷却ブロア16の吸気口(あるいは排気口あるいはその双方)に温度センサを設け、この測定温度と励磁電流(駆動電流)に基づいて、励磁コイル4、駆動コイル10の温度を推定するようにしてもよい。
【0073】
(4)なお、上記実施形態では、励磁コイル4および駆動コイル10における消費電力が最小になるように励磁電流を設定した後、冷却ブロア16の回転数をフィードバック制御するようにしている。しかし、冷却ブロア16の回転数、励磁電流、駆動電流(さらに吸気口や排気口の温度、室温などを考慮してもよい)と、励磁コイル4、駆動コイル10の温度の関係を予め算出しておき、励磁コイル4、駆動コイル10が限界温度を超えない限度において、冷却ブロア16の消費電力が最小となるブロア回転数を算出するようにしてもよい。つまり、励磁コイル4および駆動コイル10における消費電力が最小になるような励磁電流の設定に対して、どのようなブロア回転数の制御を組み合わせてもよい。
【0074】
(5)また、冷却手段が水冷の冷却装置である場合のように十分な冷却能力を有する場合などには、冷却手段の冷却能力は調整せず、励磁コイルおよび駆動コイルの合計消費電力を最小化する処理だけを行うようにしてもよい。この場合、冷却手段の消費電力はもともと十分小さいからである。
【0075】
(6)冷却手段の冷却能力が大きい場合には、冷却管付近に水滴などが発生するおそれがある。この場合には、水滴が発生する限界温度(あるいはそれより少し高い制限温度)を下回らないように、上記実施例と同じようにフィードバック制御を行うことが好ましい。
【0076】
(7)また、励磁電流の制御と冷却手段の運転能力制御は、それぞれ、単独で実施してもよい。
【0077】
(8)上記実施形態では、励磁電流の微少変化量を一定としている。しかし、励磁電流の減少に対応する消費電力の減少幅が前回より大きければ、次回の励磁電流の減少を大きくし、励磁電流の減少に対応する消費電力の減少幅が前回より小さければ、次回の励磁電流の減少を小さくするようにしてもよい。これにより、短時間で所望の励磁電流を決定することができる。
【0078】
(9)上記実施形態では、励磁コイル4、駆動コイル10の合計消費電力および冷却ブロア16の消費電力を運転関連値とし、これを最小化するようにしている。しかし、冷却ブロア16による騒音、励磁コイル4・駆動コイル10の温度、励磁コイル4・駆動コイル10が限界温度を超えない範囲においての消費電力・騒音などを運転関連値としてもよい。
【0079】
(10)上記実施形態では、DSP68が可変励磁電源26を制御して励磁電流を微小変化するようにしている。しかし、操作者が表示を見ながら手動にて励磁電流を変化するようにしてもよい。このような実施形態におけるシステムの構成を図11に示す。
【0080】
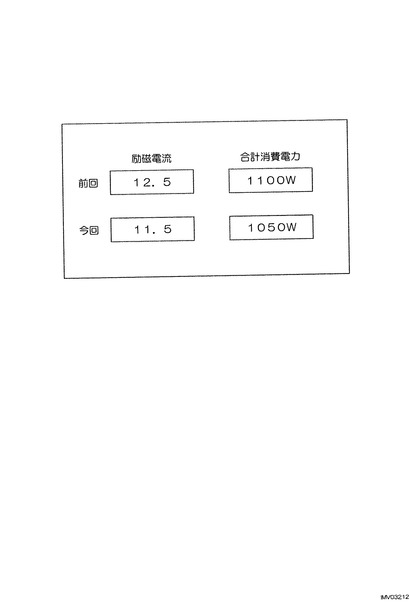
DSP68は、現在の励磁コイル4と駆動コイル10の合計消費電力(運転関連値)を取得すると、これをPC62に送信する。PC62は、これを受けて、ディスプレイ(図示せず)に合計消費電力を表示する。たとえば、図12のように表示を行う。今回の合計消費電力だけでなく、前回の合計消費電力も表示するようにしている。これにより、前回よりも合計消費電力が小さくなっているかどうかを判断することができる。
【0081】
操作者は、この画面を見て、マスターコントローラ64の調整ダイアル73を調整する。調整ダイアル73は、ダイアルの回転に応じてディジタル値を出力するものであり、DSP68は、そのディジタル値に応じて励磁電流を制御する。操作者は、図12の画面を見ながら調整ダイアル73を回転させ、表示される合計消費電力が最小になるように調整を行う。
【0082】
また、DSP68は、PC62において現在の運転関連値を表示する際に、励磁電流を増加させるべきか、減少させるべきかをディスプレイに表示するようにしてもよい。
【0083】
なお、上記では、PC62において合計消費電力(運転関連値)を表示するようにしているが、マスターコントローラ64にディスプレイを設けて表示を行うようにしてもよい。
【0084】
また、運転関連値として励磁コイル4・駆動コイル10の温度を表示し、操作者の手動にてブロア回転数を変化させるようにしてもよい。
【0085】
(11)上記実施形態では、励磁コイル4の温度、駆動コイル10の温度に基づいて、フィードバック制御を行い冷却手段の運転能力を決定するようにしている。しかし、排気温度が所定の温度になるようにフィードバック制御を行って冷却手段の運転能力を決定するようにしてもよい。この場合には、予め、励磁コイル4の温度、駆動コイル10の温度と排気温度との関係を導いておく必要がある。
【0086】
なお、同じ排気温度であっても、励磁コイル4の温度と駆動コイル10の温度の組み合わせは様々である。したがって、排気温度だけでフィードバックをする場合、各コイルが限界温度を越えないようにするには、かなり余裕をもった低い温度を制限温度とする必要がある。そこで、排気温度、励磁電流、駆動電流に基づいて、励磁コイルの温度、駆動コイルの温度を算出し、これに基づいて図9のステップS10〜S12のようなフィードバック制御を行うようにしてもよい。
【0087】
また、吸気温度と排気温度の温度差が、所定の温度になるようにフィードバック制御を行って冷却手段の運転能力を決定するようにしてもよい。この場合にも、予め、励磁コイル4の温度、駆動コイル10の温度と前記温度差との関係を導いておく必要がある。さらに、上記と同様に、励磁電流、駆動電流を考慮して、励磁コイルの温度、駆動コイルの温度を算出し、これに基づいて図9のステップS10〜S12のようなフィードバック制御を行うようにしてもよい。
【0088】
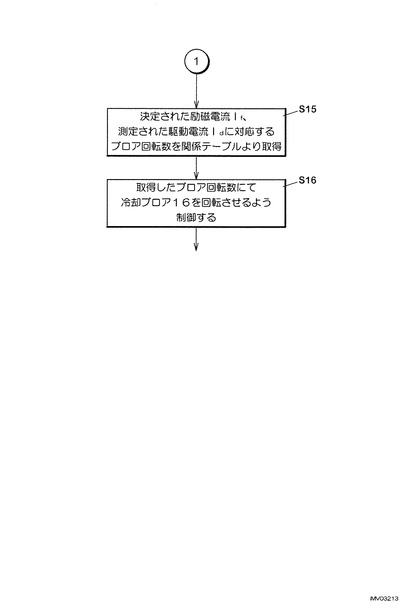
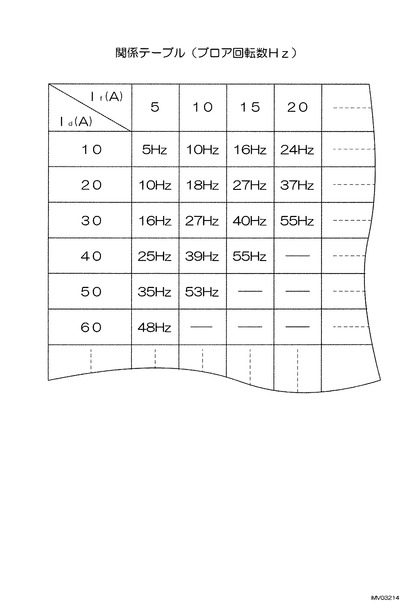
(12)上記実施形態では、フィードバック制御によってブロア回転数を制御するようにしている。しかし、予め、励磁電流If、駆動電流Idのときにおける、限界温度を超えないための必要なブロア回転数を計算もしくは実測し、これを図14に示すような関係テーブルとして記録部66に記録しておくようにしてもよい。この場合のフローチャートは、図9に代えて図13のようになる。
【0089】
DSP68は、ステップS9において決定された励磁電流If、測定された駆動電流Idに基づいて、その組み合わせに対応するブロア回転数を関係テーブルから読み出す。たとえば、励磁電流Ifが10Aであり、駆動電流Idが30Aであれば、ブロア回転数Vは27Hzであると決定することができる。
【0090】
次に、DSP68は、冷却ブロア16の回転数が、このようにして決定したブロア回転数となるように可変ブロア電源28を制御する。
【0091】
(13)また、励磁電流If、駆動電流Idに加えて、吸入口の温度(つまり冷却空気温度)も考慮に入れて、限界温度を超えないための必要なブロア回転数の関係テーブルを作成するようにしてもよい。さらに、振動発生機1が置かれている環境温度を考慮に入れてもよい。冷却ブロア16が室外から空気を取り入れている場合には、吸入口の温度と環境温度とは異なるものとなる。
【0092】
(14)なお、冷却手段の運転能力の制御は、励磁手段として励磁コイル4を用いずに永久磁石によって励磁磁界を生成するような振動発生機にも適用することができる。
【0093】
(15)上記各実施形態では、ランダム振動試験を行う場合について説明したが、固定した振動数の正弦波を与えて行う正弦波試験や周波数を時間的に掃引した正弦波振動を与えて行う試験(正弦波掃引試験)、や共振点追随試験、またこれらを複合した形の試験であるSOR(サイン・オン・ランダム試験)やROR(ランダム・オン・ランダム試験)、瞬間的に先鋭なパルス状の波形として表現された振動を与える試験(ショック試験)や実測波形を再現する試験にも適用することができる。
【技術分野】
【0001】
この発明は、振動発生装置の運転条件を決定するための装置に関するものである。
【背景技術】
【0002】
図1に、動電式振動発生機1の内部構造を示す。磁気回路2の内部には励磁コイル4が設けられている。中央部には、可動部6が、エアーサスペンション8によって、上下動可能なように保持されている。可動部6の上部は、振動試験を行う対象である供試体を固定できるようになっている。可動部6の下部には、駆動コイル10が設けられている。
【0003】
励磁コイル4に直流電流を流すことにより、空隙部12に直流磁場を形成する。この空隙部12に駆動コイル10が設けられており、駆動コイル10に交流電流を流すことによって、可動部6を上下に振動させる。これにより、可動部6の上部に取り付けた供試体を振動させる。
【0004】
なお、磁気回路2の下部にはダクト14が設けられ、その先には冷却ブロア16が取り付けられている。冷却ブロア16を回転させることにより、ダクト14を介して空気を吸引し、磁気回路2上部の空気孔18から空気を内部に導くことができる。これにより、励磁コイル4、駆動コイル10を冷却することができる。
【0005】
図2に、図1の振動発生機1を用いて構成した振動試験システムのブロック図を示す。振動発生機1の可動部6には供試体20が固定される。励磁コイル4に対しては、励磁電源25から励磁電流が供給される。冷却ブロア16に対しては、ブロア電源27から電流が供給される。供試体20に与えたい振動の周波数スペクトルを振動制御器22に設定する。振動制御器22からの駆動信号は、アンプ24によって増幅され、駆動コイル10に与えられる。これによる振動は、可動部6に設けられた加速度センサ30によって計測され、振動制御器22に与えられる。これを受けた振動制御器22は、計測された振動波形をフーリエ変換し、その周波数スペクトルを算出する。そして、振動波形の周波数スペクトルと、設定された所望の周波数スペクトルとの違いに基づいて、駆動信号の周波数スペクトルをより適切なものに修正する。そして、駆動信号の周波数スペクトルを逆フーリエ変換して、駆動信号を算出し、アンプ24に出力する。このようにして、目的とする周波数スペクトルを有する振動を、供試体20に与えることができる。
【0006】
なお、上記のように目的とする不規則振動の周波数スペクトルを与えて行う試験(ランダム振動試験)の他、固定した振動数の正弦波を与えて行う正弦波試験や周波数を時間的に掃引した正弦波振動を与えて行う試験(正弦波掃引試験)、や共振点追随試験、またこれらを複合した形の試験であるSOR(サイン・オン・ランダム試験)やROR(ランダム・オン・ランダム試験)、瞬間的に先鋭なパルス状の波形として表現された振動を与える試験(ショック試験)や実測波形を再現する試験なども行われている。
【0007】
発明者らは既に、このような振動試験システムにおいて、必要な加振力の大きさに応じて励磁電流を自動的に調整し、消費電力を最小化する装置を発明し実用化している。
【0008】
発明者らの取得した特許(特許文献1)に係る運転条件決定装置32を用いた振動試験システムの構成を図3に示す。振動制御器22は、目的とする周波数スペクトルを有する振動が供試体20に与えられるように、アンプ24を介して駆動コイル10に与える駆動信号を制御する。
【0009】
運転条件決定装置32は、アンプ24から出力され駆動コイル10に与えられる駆動電流および可変励磁電源26から出力される励磁電流を取得して、これらに基づいて目的に合致する好ましい運転条件を決定する。そして、振動制御器22によって制御され供試体20に所望の振動が与えられている状態にて、運転条件決定装置32は、決定した運転条件に到達するように、徐々に、可変励磁電源26、可変ブロア電源28を制御する。
【0010】
図4に、運転条件決定装置32の機能ブロック図を示す。振動発生機1の可動部に供試体20を装着し、標準の励磁電流を励磁コイル4に与え、振動制御器22によって、供試体20に所望の振動を与えるよう駆動コイル10に与える駆動電流を制御する。必要加振力算出手段34は、振動制御器22による制御が安定した時点で、前記の励磁電流および駆動電流を取得し、これらに基づいて、前記振動発生機1が発生している加振力を算出する。このようにして算出された加振力は、この振動発生機1を用いて、当該供試体20に対し前記所望の振動を与えようとした場合に、必要とされる加振力である。
【0011】
想定駆動電流算出手段36は、励磁電流の値を前記の標準励磁電流から変化させたとした場合に、それぞれの想定励磁電流において前記必要加振力を得るために必要な想定駆動電流を算出する。
【0012】
想定温度算出手段38は、冷却器の冷却能力を想定冷却能力にて動作させた場合に、それぞれの想定冷却能力のもとで、前記想定励磁電流を励磁コイル4に与えた場合の励磁コイルの想定温度、および想定駆動電流を駆動コイル10に与えた場合の駆動コイルの想定温度を算出する。想定温度算出手段38は、想定冷却能力を変えて、上記の想定温度の算出を行う。この想定温度は、冷却ブロア16の冷却空気流入口に設けた温度センサ119、空気排出口に設けた温度センサ119Aの計測値および温度モデルを用いて算出する。
【0013】
運転条件選択手段40は、想定励磁電流と想定冷却能力の複数の組み合わせのうち、当該組み合わせにて振動発生機1を運転させたとした場合に、励磁コイル4および駆動コイル10の想定温度が所定温度を超えず、かつ、消費電力が最小となるような組み合わせを運転条件として選択する。このようにして、消費電力などの運転関連値が所望の値となる運転条件を決定し、運転条件出力手段42は決定した条件にて振動試験システムを動作させる。
【先行技術文献】
【特許文献】
【0014】
【特許文献1】特許4231095
【発明の概要】
【発明が解決しようとする課題】
【0015】
上記従来の運転条件決定装置では、次のようにして所望の運転条件を決定していた。供試体20に所望の振動を与えるよう制御した際の、励磁電流および駆動電流に基づいて必要加振力を算出する。さらに、当該振動発生機1の特性に基づいて、励磁電流を様々に変化させたと想定した場合に、当該必要加振力を得るための駆動電流を計算する。このようにして、必要加振力を得るための励磁電流と駆動電流の組を複数算出し、これらのそれぞれについて消費電力を算出して、最も消費電力の小さい励磁電流・駆動電流を見いだす。そして、見いだした励磁電流にて振動試験システムを運転する。
【0016】
したがって、振動発生機1の特性として、励磁電流、駆動電流と加振力との関係が分かっていないと運転条件を決定することができないという問題があった。このため、予め、励磁電流・駆動電流を様々に変化させて実験を行い、励磁電流、駆動電流と加振力との関係を算出しておかなければならなかった。
【0017】
この発明は、上記のような問題点を解決して、振動発生機の特性を予め実験によって得ておかなくとも、所望の運転関連値を実現する運転条件を決定できる装置を提供することを目的とする。
【課題を解決するための手段】
【0018】
以下に、この発明の独立したいくつかの側面を列挙する。
【0019】
(1)この発明に係る運転条件決定装置は、静磁場を生成する励磁コイルと、前記励磁コイルによって生成された静磁場に設けられ、電磁力により駆動される駆動コイルと、前記駆動コイルの駆動力を供試体に伝えるための可動部と、を備えた振動発生機の運転条件を決定するための運転条件決定装置であって、可動部に供試体を装着し、所定の励磁電流を与え、供試体に所望の振動を与えるよう振動制御装置によって駆動電流を制御した場合における励磁コイルおよび駆動コイルの合計消費電力を取得する運転関連値取得手段と、前記励磁電流を順次減少させ、対応する合計消費電力の変化に基づいて、当該合計消費電力の極小値を見いだし、当該合計消費電力の極小値に対応する励磁電流を、少なくとも条件の一つとして含む運転条件を決定する運転条件決定手段とを備えている。
【0020】
したがって、振動発生機の特性を予め実験によって得ておかなくとも、励磁コイルおよび駆動コイルにおける消費電力を最小とした省電力運転のための運転条件を決定することができる。
【0021】
(2)この発明に係る運転条件決定装置は、静磁場を生成する励磁コイルと、前記励磁コイルによって生成された静磁場に設けられ、電磁力により駆動される駆動コイルと、前記駆動コイルの駆動力を供試体に伝えるための可動部と、を備えた振動発生機の運転条件を決定するための運転条件決定装置であって、可動部に供試体を装着し、所定の励磁電流を与え、供試体に所望の振動を与えるよう駆動電流を制御した場合における運転関連値を取得する運転関連値取得手段と、前記励磁電流を順次変化させ、対応する運転関連値の変化に基づいて、所望の運転関連値を見いだし、当該所望の運転関連値に対応する励磁電流を、少なくとも条件の一つとして含む運転条件を決定する運転条件決定手段とを備えている。
【0022】
したがって、振動発生機の特性を予め実験によって得ておかなくとも、所望の運転関連値を実現する運転条件を決定することができる。
【0023】
(3)この発明に係る運転条件決定装置は、運転関連値は、励磁コイルおよび駆動コイルにおける消費電力であり、所望の運転関連値は、最小の消費電力であることを特徴としている。
【0024】
したがって、励磁コイルおよび駆動コイルにおける消費電力を最小とした省電力運転のための運転条件を決定することができる。
【0025】
(4)この発明に係る運転条件決定装置は、励磁コイルまたは駆動コイルまたはその双方を冷却する冷却手段を備え、運転関連値は、励磁コイル、駆動コイルおよび冷却手段における消費電力であり、所望の運転関連値は、前記励磁コイルおよび駆動コイルがともに制限温度内にあることを前提とした、最小の消費電力であることを特徴としている。
【0026】
したがって、励磁コイル、駆動コイル、冷却手段における消費電力を最小とした省電力運転のための運転条件を決定することができる。
【0027】
(5)この発明に係る運転条件決定装置は、励磁コイルまたは駆動コイルまたはその双方を冷却する冷却手段を備え、運転関連値は、冷却手段の発する騒音であり、所望の運転関連値は、前記励磁コイルおよび駆動コイルがともに制限温度内にあることを前提とした、最小の騒音であることを特徴としている。
【0028】
したがって、最小の騒音を実現するための運転条件を決定することができる。
【0029】
(6)この発明に係る運転条件決定装置は、励磁コイルまたは駆動コイルまたはその双方を冷却する冷却手段を備え、運転条件決定手段は、励磁電流を決定した後、励磁コイルおよび駆動コイルの限界温度近傍の所定の温度を制限温度とし、励磁コイルの温度の制限温度に対する偏差と、駆動コイルの温度の制限温度に対する偏差との大きい方の偏差がゼロになるように、冷却手段の冷却能力を操作量としてフィードバック制御を行うことにより、冷却能力を運転条件の一つとして決定することを特徴としている。
【0030】
したがって、冷却能力を運転条件の一つとして決定することができる。
【0031】
(13)この発明に係る運転条件決定装置は、静磁場を生成する励磁コイルと、前記励磁コイルによって生成された静磁場に設けられ、電磁力により駆動される駆動コイルと、前記駆動コイルの駆動力を供試体に伝えるための可動部と、を備えた振動発生機の運転条件を決定するための運転条件決定装置であって、可動部に供試体を装着し、所定の励磁電流を与え、供試体に所望の振動を与えるよう駆動電流を制御した場合における運転関連値を取得する運転関連値取得手段と、前記運転関連値取得手段によって取得した運転関連値を表示する表示手段と、前記表示された運転関連値を見た操作者によって操作され、励磁電流を変動させる励磁電流変動手段とを備えている。
【0032】
したがって、操作者は、表示された運転関連値を観察しながら励磁電流を変化させ、所望の運転関連値を実現することができる。
【0033】
この発明において、「運転関連値」とは、振動発生機を運転させた際の振動発生機自体あるいはその周辺装置の諸特性をいい、実施形態では、励磁コイルおよび駆動コイルの消費電力、冷却ブロアの消費電力、冷却ブロアの騒音などがこれに該当する。
【0034】
「運転関連値取得手段」は、実施形態においては、図8のステップS4、S5などがこれに対応する。
【0035】
「運転条件」とは、振動発生機を運転させる際の振動発生機自体あるいはその周辺装置の運転の条件であり、実施形態では、励磁電流、ブロア回転数などがこれに該当する。
【0036】
「運転条件決定手段」は、実施形態においては、図8のステップS7〜S9や図9のステップS10〜S12などがこれに対応する。
【0037】
「励磁電流変更手段」は、実施形態においては、図8のステップS8がこれに対応する。
【0038】
「変位点検出手段」は、実施形態においては、図8のステップS7がこれに対応する。
【0039】
「フィードバック制御手段」は、実施形態においては、図9のステップS10〜S12がこれに対応する。
【0040】
「限界温度」とは、励磁コイルや駆動コイルがこれ以上の温度になると、焼損するおそれのある温度をいう。
【0041】
「プログラム」とは、CPUにより直接実行可能なプログラムだけでなく、ソース形式のプログラム、圧縮処理がされたプログラム、暗号化されたプログラム等を含む概念である。
【図面の簡単な説明】
【0042】
【図1】振動発生機の構造を示す図である。
【図2】振動試験システムの構成を示す図である。
【図3】従来の運転条件決定装置32を用いたシステムを示す図である。
【図4】従来の運転条件決定装置32の機能ブロック図である。
【図4a】消費電力に関する特性例を示すグラフである。
【図5】本発明の一実施形態による運転条件決定装置100を用いたシステムを示す図である。
【図6】運転条件決定装置100の機能ブロック図である。
【図7】一実施形態による運転条件決定装置のハードウエア構成を示す図である。
【図8】運転条件決定プログラム74のフローチャートである。
【図9】運転条件決定プログラム74のフローチャートである。
【図10】他の実施形態において、放射温度計80を用いた場合を示す図である。
【図11】他の実施形態による運転条件決定装置のハードウエア構成を示す図である。
【図12】図11の実施形態における表示例である。
【図13】他の実施形態による運転条件決定プログラム74のフローチャートである。
【図14】関係テーブルの一例を示す図である。
【発明を実施するための形態】
【0043】
1.第1の実施形態
<最小電力実現設定条件の決定に用いる原理>
図4aは、動電式振動発生機の消費電力に関する一般特性を例示したものであって、ある一定の加振力を発生させるのに必要な励磁コイルにおける消費電力Pfと、駆動コイルにおける消費電力Pdとを、励磁電流設定値Ifの関数として示したものである。いま、励磁電流を定格励磁電流値に設定しておき、これを少しずつ小さくして行くことを考えると、ふたつのコイルでの消費電力の合計値(Pd+Pf)は単調に減少して行きある点で極小値をとることが分かる。従って、励磁電流をゆっくりと減少させながらコイルの消費電力の変化を観察すれば、振動発生機の特性を予め実験によって得ておかなくとも、この極小値を実現する励磁電流設定値を見つけることが可能である。この点では(Pd+Pf)の大きさがIfの設定可能範囲の中では最小となるので、この励磁電流設定値の下で冷却手段の消費電力Pbを許される範囲で最小の値に設定すれば、総消費電力(Pd+Pf+Pb)を最小に設定することが出来る。
【0044】
なおこのとき、冷却手段の消費電力Pbの可能な最小値の探索には、ブロア回転数を下げればコイル温度は単調増加することを利用し、ブロア回転数を操作量としコイル温度の制限値を目標値としてコイル温度をフィードバック制御する方法を採用することが出来る。これによって、振動発生機の熱的特性を予め実験によって得ておかなくとも、Pbの可能な最小値を決定することが出来る。
【0045】
図5に、この発明の一実施形態による運転条件決定装置100を用いた振動試験システムを示す。振動制御器22(たとえばIMV株式会社のK2を用いることができる)は、目的とする周波数スペクトルを有する振動が供試体20に与えられるように、アンプ24を介して駆動コイル10に与える駆動信号を制御する。
【0046】
運転条件決定装置100は、可変励磁電源26を制御して励磁電流を変化させ、各励磁電流における駆動電流を計測し、運転関連値の変化を得る。この運転関連値の変化に基づいて、所望の運転関連値を実現する運転条件を特定する。
【0047】
運転条件決定装置100の機能ブロック図を図6に示す。振動発生機1には、供試体20が載置されている。励磁電流変更手段52は、振動発生機1に与える励磁電流を変更するものである。振動制御器22は、設定された励磁電流のもとで、供試体20に所望の振動を与えるように、振動発生機1の駆動電流を制御する。運転関連値取得手段50は、振動制御器22による制御が安定した時点における運転関連値(たとえば、励磁コイル、駆動コイルの消費電力)を取得する。
【0048】
励磁電流変更手段52は、振動制御器22による制御が安定すると、励磁電流を微少値だけ変化させる。たとえば、定格励磁電流から始めて、0.1Aずつ減少させる。したがって、運転関連値取得手段50は、微小変化する励磁電流の各値に対する運転関連値を取得することになる。
【0049】
変位点検出手段54は、運転関連値取得手段50が取得した一連の運転関連値を観察し、その変位点を検出する。たとえば、消費電力を最小化する場合であれば、運転関連値として消費電力を観察し、消費電力が徐々に減少し、その後増加に転じる点を変位点として見いだす。この変位点に対応する励磁電流を、運転条件として設定する。
【0050】
フィードバック制御手段56は、冷却手段60の運転を制御し、振動発生機1の励磁コイルの限界温度および駆動コイルの限界温度よりやや低い温度を制限値として、フィードバック制御を行う。なお、フィードバック制御手段56は、励磁コイルまたは駆動コイルのうち、制限値に対する偏差の大きい方に注目して制御を行う。以上のようにして、フィードバック制御によって決定した冷却手段60の冷却能力を、運転条件として設定する。
【0051】
この実施形態では、励磁電流変更手段52、変位点検出手段54、フィードバック制御手段56により、運転条件決定手段100が構成されている。
【0052】
この実施形態において用いた振動発生機1は、図1に示す従来のものと同様である。ただし、励磁コイル4の温度を測定するための温度センサ19(熱電対または測温抵抗体など)、駆動コイル10の温度を計測するための温度センサ21(熱電対または測温抵抗体など)を設けている点が従来と異なる。
【0053】
図7に、運転条件決定装置をDSPを用いて実現した場合のハードウエア構成を示す。PC62は、ディスプレイ、キーボード/マウス(図示せず)などを有しており、操作者の指令を受けたり、操作者に対する表示を行ったりする。PC62には、運転条件決定装置であるマスターコントローラ64が接続されている。
【0054】
マスターコントローラ64は、ディジタル・シグナル・プロセッサ(DSP)68を有している。DSP68には、記録部66、I/Oポート70が接続されている。記録部66には、運転条件決定プログラム74が記録されている。DSP68は、運転条件決定プログラム74にしたがって、I/Oポート70を介して、可変励磁電源26、可変ブロア電源28を制御する。なお、可変励磁電源26、可変ブロア電源28は、スイッチングコンバータを有しており、DSP68からの指令どおりの出力となるように制御を行う。したがって、可変励磁電源26により、振動発生機1に与える励磁電流を制御することができる。また、可変ブロア電源28により、冷却手段である冷却ブロア16の回転数を変化させ、冷却能力を制御することができる。
【0055】
励磁コイルの温度センサ19、駆動コイルの温度センサ21の出力は、A/D変換器72によってディジタルデータとされ、I/Oポート70を介して取り込まれる。また、駆動電流、駆動電圧、励磁電流、励磁電圧は、電流計/電圧計76によって計測され、A/D変換器72によってディジタルデータとされ、I/Oポート70を介して取り込まれる。
【0056】
振動制御器22は、設定されたスペクトルの振動が供試体20に与えられるように、アンプ24を介して駆動電流を制御する。
【0057】
図8、図9に、運転条件決定プログラム74のフローチャートを示す。振動発生機1に供試体20を固定し、振動制御器22に目標とする振動のスペクトルを設定する。DSP68は、可変励磁電源26を制御して可変励磁電流を定格値If0(この実施形態では最大値)とし、可変ブロア電源28を制御して冷却ブロア16の回転数を定格値V0(この実施形態では最大値)とする(ステップS1)。
【0058】
次に、DSP68は、振動制御器22による駆動電流の制御を開始する(ステップS2)。DSP68は、振動制御器22による制御が安定したかどうかを判断する(ステップS3)。たとえば、所定時間経過により制御が安定すると仮定して判断してもよい。
【0059】
制御が安定したと判断すると、DSP68は、電流計/電圧計76の出力を取り込み、励磁電流If、励磁電圧Vf、駆動電流Id、駆動電圧Vdを測定する(ステップS4)。続いて、励磁コイルにおける消費電力Pfを励磁電流If、励磁電圧Vfに基づいて算出し、駆動コイルにおける消費電力Pdを駆動電流Id、駆動電圧Vdに基づいて算出する(ステップS5)。そして、合計消費電力をPf+Pdとして求める。なお、消費電力値を得るには、駆動電圧を測る代わりに、コイルの直流抵抗値と温度係数とを用いて、駆動電流実効値のみを測定して算出することも出来る。
【0060】
次に、DSP68は、駆動電流Idが、限界値Idmaxを超えているかどうかを判断する(ステップS6)。超えていれば、ステップS9に進む。超えていなければ、合計消費電力Pf+Pdが、前回より小さくなっているかどうかを判断する(ステップS7)。1回目は、前回の測定値がないので、ステップS8に進む。
【0061】
ステップS8において、DSP68は、励磁電流Ifを微少量減少させるよう、可変励磁電源26を制御する(ステップS8)。この実施形態では、0.1A減少させている。
【0062】
励磁電流Ifが減少すると、振動発生機1が供試体20に与える振動のスペクトルが変化し、所望のスペクトルから外れることになる。したがって、振動制御器22は、設定されたスペクトルを有する振動が供試体20に与えられるように、駆動電流Idを制御する。
【0063】
振動制御器22による制御が安定すると、DSP68は、励磁電流If、励磁電圧Vf、駆動電流Id、駆動電圧Vdを計測し(ステップS4)、合計消費電力Pf+Pdを算出する(ステップS5)。合計消費電力が前回のIfの時よりも小さくなっていれば、さらに励磁電流Ifを微少量減少させる(ステップS8)。
【0064】
これを繰り返し、合計消費電力が前回よりも小さくなっていれば、励磁電流Ifを減少させ続ける。DSP68は、合計消費電力が前回よりも大きくなっていた場合、ステップS7からステップS9に進む。この場合、前回の励磁電流の値Ifの時に合計消費電力が極小であったと推定できる。したがって、ステップS9において、DSP68は、前回の励磁電流の値Ifに戻すように、可変励磁電源26を制御する。このようにして、マスターコントローラ64は、合計消費電力が極小となる励磁電流Ifを見いだし、出力することができる。
【0065】
次に、DSP68は、励磁コイル4の温度センサ19、駆動コイル10の温度センサ21の出力を取り込み、励磁コイル4の温度Tf、駆動コイル10の温度Tdを計測する(ステップS10)。DSP68は、温度制限値Tlimからの励磁コイル4の温度Tfの偏差Df、温度制限値Tlimからの駆動コイル10の温度Tdの偏差Ddを算出する。そして、偏差Dfと偏差Ddの大きい方を選択する(ステップS11)。
【0066】
DSP68は、選択した偏差がゼロになるように、可変ブロア電源28により、冷却ブロア16の回転数をPID制御する(ステップS12)。ステップS10〜S12を繰り返すことにより、温度制限値Tlimになるように励磁コイル4あるいは駆動コイル10の温度が制御される。
【0067】
なお、この実施形態では、温度制限値Tlimは、励磁コイル4、駆動コイル10の温度限界値(コイルが焼き切れる可能性のある温度)よりも、やや低い温度(たとえば2度下)に設定している。
【0068】
冷却ブロア16は、回転数が少ないほど消費電力が小さくなるので、上記制御により、励磁コイル4、駆動コイル10の温度限界値の範囲内において、可変ブロア電源28に対して設定値を出力することにより、ほぼ最小のブロア消費電力を達成できる。
【0069】
以上のようにして、運転関連値としてのコイル及び冷却ブロアにおける消費電力を最小にすることができる。
【0070】
2.その他の実施形態
(1)上記実施形態では、温度センサとして熱電対または測温抵抗体を用いている。しかし、図10に示すように、振動発生機ボディ(磁気回路)に穴を開け、その内部に放射温度計80を収納して、駆動コイル10の温度を非接触にて計測するようにしてもよい。駆動コイル10に直接熱電対または測温抵抗体を付ける場合に比べ、振動が放射温度計80に与えられないので断線などの故障が少なくなるという利点がある。
【0071】
(2)また、励磁コイル、駆動コイルともに、その直流抵抗は温度係数を有している。したがって、直流抵抗を計測することで、その温度を知ることができる。このようにして温度を算出するようにしてもよい。なお、励磁コイル、駆動コイルの直流抵抗は、消費電力(実効値)を電流値(実効値)の自乗で割ることにより求めることができる。
【0072】
(3)あるいは、冷却ブロア16の吸気口(あるいは排気口あるいはその双方)に温度センサを設け、この測定温度と励磁電流(駆動電流)に基づいて、励磁コイル4、駆動コイル10の温度を推定するようにしてもよい。
【0073】
(4)なお、上記実施形態では、励磁コイル4および駆動コイル10における消費電力が最小になるように励磁電流を設定した後、冷却ブロア16の回転数をフィードバック制御するようにしている。しかし、冷却ブロア16の回転数、励磁電流、駆動電流(さらに吸気口や排気口の温度、室温などを考慮してもよい)と、励磁コイル4、駆動コイル10の温度の関係を予め算出しておき、励磁コイル4、駆動コイル10が限界温度を超えない限度において、冷却ブロア16の消費電力が最小となるブロア回転数を算出するようにしてもよい。つまり、励磁コイル4および駆動コイル10における消費電力が最小になるような励磁電流の設定に対して、どのようなブロア回転数の制御を組み合わせてもよい。
【0074】
(5)また、冷却手段が水冷の冷却装置である場合のように十分な冷却能力を有する場合などには、冷却手段の冷却能力は調整せず、励磁コイルおよび駆動コイルの合計消費電力を最小化する処理だけを行うようにしてもよい。この場合、冷却手段の消費電力はもともと十分小さいからである。
【0075】
(6)冷却手段の冷却能力が大きい場合には、冷却管付近に水滴などが発生するおそれがある。この場合には、水滴が発生する限界温度(あるいはそれより少し高い制限温度)を下回らないように、上記実施例と同じようにフィードバック制御を行うことが好ましい。
【0076】
(7)また、励磁電流の制御と冷却手段の運転能力制御は、それぞれ、単独で実施してもよい。
【0077】
(8)上記実施形態では、励磁電流の微少変化量を一定としている。しかし、励磁電流の減少に対応する消費電力の減少幅が前回より大きければ、次回の励磁電流の減少を大きくし、励磁電流の減少に対応する消費電力の減少幅が前回より小さければ、次回の励磁電流の減少を小さくするようにしてもよい。これにより、短時間で所望の励磁電流を決定することができる。
【0078】
(9)上記実施形態では、励磁コイル4、駆動コイル10の合計消費電力および冷却ブロア16の消費電力を運転関連値とし、これを最小化するようにしている。しかし、冷却ブロア16による騒音、励磁コイル4・駆動コイル10の温度、励磁コイル4・駆動コイル10が限界温度を超えない範囲においての消費電力・騒音などを運転関連値としてもよい。
【0079】
(10)上記実施形態では、DSP68が可変励磁電源26を制御して励磁電流を微小変化するようにしている。しかし、操作者が表示を見ながら手動にて励磁電流を変化するようにしてもよい。このような実施形態におけるシステムの構成を図11に示す。
【0080】
DSP68は、現在の励磁コイル4と駆動コイル10の合計消費電力(運転関連値)を取得すると、これをPC62に送信する。PC62は、これを受けて、ディスプレイ(図示せず)に合計消費電力を表示する。たとえば、図12のように表示を行う。今回の合計消費電力だけでなく、前回の合計消費電力も表示するようにしている。これにより、前回よりも合計消費電力が小さくなっているかどうかを判断することができる。
【0081】
操作者は、この画面を見て、マスターコントローラ64の調整ダイアル73を調整する。調整ダイアル73は、ダイアルの回転に応じてディジタル値を出力するものであり、DSP68は、そのディジタル値に応じて励磁電流を制御する。操作者は、図12の画面を見ながら調整ダイアル73を回転させ、表示される合計消費電力が最小になるように調整を行う。
【0082】
また、DSP68は、PC62において現在の運転関連値を表示する際に、励磁電流を増加させるべきか、減少させるべきかをディスプレイに表示するようにしてもよい。
【0083】
なお、上記では、PC62において合計消費電力(運転関連値)を表示するようにしているが、マスターコントローラ64にディスプレイを設けて表示を行うようにしてもよい。
【0084】
また、運転関連値として励磁コイル4・駆動コイル10の温度を表示し、操作者の手動にてブロア回転数を変化させるようにしてもよい。
【0085】
(11)上記実施形態では、励磁コイル4の温度、駆動コイル10の温度に基づいて、フィードバック制御を行い冷却手段の運転能力を決定するようにしている。しかし、排気温度が所定の温度になるようにフィードバック制御を行って冷却手段の運転能力を決定するようにしてもよい。この場合には、予め、励磁コイル4の温度、駆動コイル10の温度と排気温度との関係を導いておく必要がある。
【0086】
なお、同じ排気温度であっても、励磁コイル4の温度と駆動コイル10の温度の組み合わせは様々である。したがって、排気温度だけでフィードバックをする場合、各コイルが限界温度を越えないようにするには、かなり余裕をもった低い温度を制限温度とする必要がある。そこで、排気温度、励磁電流、駆動電流に基づいて、励磁コイルの温度、駆動コイルの温度を算出し、これに基づいて図9のステップS10〜S12のようなフィードバック制御を行うようにしてもよい。
【0087】
また、吸気温度と排気温度の温度差が、所定の温度になるようにフィードバック制御を行って冷却手段の運転能力を決定するようにしてもよい。この場合にも、予め、励磁コイル4の温度、駆動コイル10の温度と前記温度差との関係を導いておく必要がある。さらに、上記と同様に、励磁電流、駆動電流を考慮して、励磁コイルの温度、駆動コイルの温度を算出し、これに基づいて図9のステップS10〜S12のようなフィードバック制御を行うようにしてもよい。
【0088】
(12)上記実施形態では、フィードバック制御によってブロア回転数を制御するようにしている。しかし、予め、励磁電流If、駆動電流Idのときにおける、限界温度を超えないための必要なブロア回転数を計算もしくは実測し、これを図14に示すような関係テーブルとして記録部66に記録しておくようにしてもよい。この場合のフローチャートは、図9に代えて図13のようになる。
【0089】
DSP68は、ステップS9において決定された励磁電流If、測定された駆動電流Idに基づいて、その組み合わせに対応するブロア回転数を関係テーブルから読み出す。たとえば、励磁電流Ifが10Aであり、駆動電流Idが30Aであれば、ブロア回転数Vは27Hzであると決定することができる。
【0090】
次に、DSP68は、冷却ブロア16の回転数が、このようにして決定したブロア回転数となるように可変ブロア電源28を制御する。
【0091】
(13)また、励磁電流If、駆動電流Idに加えて、吸入口の温度(つまり冷却空気温度)も考慮に入れて、限界温度を超えないための必要なブロア回転数の関係テーブルを作成するようにしてもよい。さらに、振動発生機1が置かれている環境温度を考慮に入れてもよい。冷却ブロア16が室外から空気を取り入れている場合には、吸入口の温度と環境温度とは異なるものとなる。
【0092】
(14)なお、冷却手段の運転能力の制御は、励磁手段として励磁コイル4を用いずに永久磁石によって励磁磁界を生成するような振動発生機にも適用することができる。
【0093】
(15)上記各実施形態では、ランダム振動試験を行う場合について説明したが、固定した振動数の正弦波を与えて行う正弦波試験や周波数を時間的に掃引した正弦波振動を与えて行う試験(正弦波掃引試験)、や共振点追随試験、またこれらを複合した形の試験であるSOR(サイン・オン・ランダム試験)やROR(ランダム・オン・ランダム試験)、瞬間的に先鋭なパルス状の波形として表現された振動を与える試験(ショック試験)や実測波形を再現する試験にも適用することができる。
【特許請求の範囲】
【請求項1】
静磁場を生成する励磁コイルと、前記励磁コイルによって生成された静磁場に設けられ、電磁力により駆動される駆動コイルと、前記駆動コイルの駆動力を供試体に伝えるための可動部と、を備えた振動発生機の運転条件を決定するための運転条件決定装置であって、
可動部に供試体を装着し、所定の励磁電流を与え、供試体に所望の振動を与えるよう振動制御装置によって駆動電流を制御した場合における励磁コイルおよび駆動コイルの合計消費電力を取得する運転関連値取得手段と、
前記励磁電流を順次減少させ、対応する合計消費電力の変化に基づいて、当該合計消費電力の極小値を見いだし、当該合計消費電力の極小値に対応する励磁電流を、少なくとも条件の一つとして含む運転条件を決定する運転条件決定手段と、
を備えた運転条件決定装置。
【請求項2】
静磁場を生成する励磁コイルと、前記励磁コイルによって生成された静磁場に設けられ、電磁力により駆動される駆動コイルと、前記駆動コイルの駆動力を供試体に伝えるための可動部と、を備えた振動発生機の運転条件を決定するための運転条件決定装置であって、
可動部に供試体を装着し、所定の励磁電流を与え、供試体に所望の振動を与えるよう駆動電流を制御した場合における運転関連値を取得する運転関連値取得手段と、
前記励磁電流を順次変化させ、対応する運転関連値の変化に基づいて、所望の運転関連値を見いだし、当該所望の運転関連値に対応する励磁電流を、少なくとも条件の一つとして含む運転条件を決定する運転条件決定手段と、
を備えた運転条件決定装置。
【請求項3】
請求項2の運転条件決定装置において、
前記運転関連値は、励磁コイルおよび駆動コイルにおける消費電力であり、
前記所望の運転関連値は、最小の消費電力であることを特徴とする運転条件決定装置。
【請求項4】
請求項2の運転条件決定装置において、
励磁コイルまたは駆動コイルまたはその双方を冷却する冷却手段を備え、
前記運転関連値は、励磁コイル、駆動コイルおよび冷却手段における消費電力であり、
前記所望の運転関連値は、前記励磁コイルおよび駆動コイルがともに制限温度内にあることを前提とした、最小の消費電力であることを特徴とする運転条件決定装置。
【請求項5】
請求項2の運転条件決定装置において、
励磁コイルまたは駆動コイルまたはその双方を冷却する冷却手段を備え、
前記運転関連値は、冷却手段の発する騒音であり、
前記所望の運転関連値は、前記励磁コイルおよび駆動コイルがともに制限温度内にあることを前提とした、最小の騒音であることを特徴とする運転条件決定装置。
【請求項6】
請求項2の運転条件決定装置において、
励磁コイルまたは駆動コイルまたはその双方を冷却する冷却手段を備え、
前記運転条件決定手段は、励磁電流を決定した後、励磁コイルおよび駆動コイルの限界温度近傍の所定の温度を制限温度とし、励磁コイルの温度の制限温度に対する偏差と、駆動コイルの温度の制限温度に対する偏差との大きい方の偏差がゼロになるように、冷却手段の冷却能力を操作量としてフィードバック制御を行うことにより、冷却能力を運転条件の一つとして決定することを特徴とする運転条件決定装置。
【請求項7】
静磁場を生成する励磁コイルと、前記励磁コイルによって生成された静磁場に設けられ、電磁力により駆動される駆動コイルと、前記駆動コイルの駆動力を供試体に伝えるための可動部と、を備えた振動発生機の運転条件を決定するため、コンピュータを、
可動部に供試体を装着し、所定の励磁電流を与え、供試体に所望の振動を与えるよう振動制御装置によって駆動電流を制御した場合における励磁コイルおよび駆動コイルの合計消費電力を取得する運転関連値取得手段、
前記励磁電流を順次減少させ、対応する合計消費電力の変化に基づいて、当該合計消費電力の極小値を見いだし、当該合計消費電力の極小値に対応する励磁電流を、少なくとも条件の一つとして含む運転条件を決定する運転条件決定手段、
として機能させるための運転条件決定プログラム。
【請求項8】
静磁場を生成する励磁コイルと、前記励磁コイルによって生成された静磁場に設けられ、電磁力により駆動される駆動コイルと、前記駆動コイルの駆動力を供試体に伝えるための可動部と、を備えた振動発生機の運転条件を決定するため、コンピュータを、
可動部に供試体を装着し、所定の励磁電流を与え、供試体に所望の振動を与えるよう駆動電流を制御した場合における運転関連値を取得する運転関連値取得手段、
前記励磁電流を順次変化させ、対応する運転関連値の変化に基づいて、所望の運転関連値を見いだし、当該所望の運転関連値に対応する励磁電流を、少なくとも条件の一つとして含む運転条件を決定する運転条件決定手段、
として機能させるための運転条件決定プログラム。
【請求項9】
請求項8の運転条件決定プログラムにおいて、
前記運転関連値は、励磁コイルおよび駆動コイルにおける消費電力であり、
前記所望の運転関連値は、最小の消費電力であることを特徴とする運転条件決定プログラム。
【請求項10】
請求項8の運転条件決定プログラムにおいて、
前記プログラムは、コンピュータを、さらに、励磁コイルまたは駆動コイルまたはその双方を冷却する冷却手段として機能させるものであり、
前記運転関連値は、励磁コイル、駆動コイルおよび冷却手段における消費電力であり、
前記所望の運転関連値は、前記励磁コイルおよび駆動コイルがともに制限温度内にあることを前提とした、最小の消費電力であることを特徴とする運転条件決定プログラム。
【請求項11】
請求項8の運転条件決定プログラムにおいて、
前記プログラムは、コンピュータを、さらに、励磁コイルまたは駆動コイルまたはその双方を冷却する冷却手段として機能させるものであり、
前記運転関連値は、冷却手段の発する騒音であり、
前記所望の運転関連値は、前記励磁コイルおよび駆動コイルがともに制限温度内にあることを前提とした、最小の騒音であることを特徴とする運転条件決定プログラム。
【請求項12】
請求項8の運転条件決定装置において、
前記プログラムは、コンピュータを、さらに、励磁コイルまたは駆動コイルまたはその双方を冷却する冷却手段として機能させるものであり、
前記運転条件決定手段は、励磁電流を決定した後、励磁コイルおよび駆動コイルの限界温度近傍の所定の温度を制限温度とし、励磁コイルの温度の制限温度に対する偏差と、駆動コイルの温度の制限温度に対する偏差との大きい方の偏差がゼロになるように、冷却手段の冷却能力を操作量としてフィードバック制御を行うことにより、冷却能力を運転条件の一つとして決定することを特徴とする運転条件決定プログラム。
【請求項13】
静磁場を生成する励磁コイルと、前記励磁コイルによって生成された静磁場に設けられ、電磁力により駆動される駆動コイルと、前記駆動コイルの駆動力を供試体に伝えるための可動部と、を備えた振動発生機の運転条件を決定する方法であって、
可動部に供試体を装着し、所定の励磁電流を与え、供試体に所望の振動を与えるよう駆動電流を制御した場合における運転関連値を取得し、
前記励磁電流を順次変化させ、対応する運転関連値の変化に基づいて、所望の運転関連値を見いだし、当該所望の運転関連値に対応する励磁電流を,少なくとも条件の一つとして含む運転条件を決定する運転条件決定方法。
【請求項14】
静磁場を生成する励磁コイルと、前記励磁コイルによって生成された静磁場に設けられ、電磁力により駆動される駆動コイルと、前記駆動コイルの駆動力を供試体に伝えるための可動部と、を備えた振動発生機の運転条件を決定するための運転条件決定装置であって、
可動部に供試体を装着し、所定の励磁電流を与え、供試体に所望の振動を与えるよう駆動電流を制御した場合における運転関連値を取得する運転関連値取得手段と、
前記運転関連値取得手段によって取得した運転関連値を表示する表示手段と、
前記表示された運転関連値を見た操作者によって操作され、励磁電流を変動させる励磁電流変動手段と、
を備えた運転条件決定装置。
【請求項15】
静磁場を生成する励磁コイルと、前記励磁コイルによって生成された静磁場に設けられ、電磁力により駆動される駆動コイルと、前記駆動コイルの駆動力を供試体に伝えるための可動部と、を備えた振動発生機の運転条件を決定する方法であって、
可動部に供試体を装着し、所定の励磁電流を与え、供試体に所望の振動を与えるよう駆動電流を制御した場合における運転関連値を取得し、
取得した運転関連値を表示し、
前記表示された運転関連値に応じて励磁電流を変動させることを特徴とする運転条件決定方法。
【請求項1】
静磁場を生成する励磁コイルと、前記励磁コイルによって生成された静磁場に設けられ、電磁力により駆動される駆動コイルと、前記駆動コイルの駆動力を供試体に伝えるための可動部と、を備えた振動発生機の運転条件を決定するための運転条件決定装置であって、
可動部に供試体を装着し、所定の励磁電流を与え、供試体に所望の振動を与えるよう振動制御装置によって駆動電流を制御した場合における励磁コイルおよび駆動コイルの合計消費電力を取得する運転関連値取得手段と、
前記励磁電流を順次減少させ、対応する合計消費電力の変化に基づいて、当該合計消費電力の極小値を見いだし、当該合計消費電力の極小値に対応する励磁電流を、少なくとも条件の一つとして含む運転条件を決定する運転条件決定手段と、
を備えた運転条件決定装置。
【請求項2】
静磁場を生成する励磁コイルと、前記励磁コイルによって生成された静磁場に設けられ、電磁力により駆動される駆動コイルと、前記駆動コイルの駆動力を供試体に伝えるための可動部と、を備えた振動発生機の運転条件を決定するための運転条件決定装置であって、
可動部に供試体を装着し、所定の励磁電流を与え、供試体に所望の振動を与えるよう駆動電流を制御した場合における運転関連値を取得する運転関連値取得手段と、
前記励磁電流を順次変化させ、対応する運転関連値の変化に基づいて、所望の運転関連値を見いだし、当該所望の運転関連値に対応する励磁電流を、少なくとも条件の一つとして含む運転条件を決定する運転条件決定手段と、
を備えた運転条件決定装置。
【請求項3】
請求項2の運転条件決定装置において、
前記運転関連値は、励磁コイルおよび駆動コイルにおける消費電力であり、
前記所望の運転関連値は、最小の消費電力であることを特徴とする運転条件決定装置。
【請求項4】
請求項2の運転条件決定装置において、
励磁コイルまたは駆動コイルまたはその双方を冷却する冷却手段を備え、
前記運転関連値は、励磁コイル、駆動コイルおよび冷却手段における消費電力であり、
前記所望の運転関連値は、前記励磁コイルおよび駆動コイルがともに制限温度内にあることを前提とした、最小の消費電力であることを特徴とする運転条件決定装置。
【請求項5】
請求項2の運転条件決定装置において、
励磁コイルまたは駆動コイルまたはその双方を冷却する冷却手段を備え、
前記運転関連値は、冷却手段の発する騒音であり、
前記所望の運転関連値は、前記励磁コイルおよび駆動コイルがともに制限温度内にあることを前提とした、最小の騒音であることを特徴とする運転条件決定装置。
【請求項6】
請求項2の運転条件決定装置において、
励磁コイルまたは駆動コイルまたはその双方を冷却する冷却手段を備え、
前記運転条件決定手段は、励磁電流を決定した後、励磁コイルおよび駆動コイルの限界温度近傍の所定の温度を制限温度とし、励磁コイルの温度の制限温度に対する偏差と、駆動コイルの温度の制限温度に対する偏差との大きい方の偏差がゼロになるように、冷却手段の冷却能力を操作量としてフィードバック制御を行うことにより、冷却能力を運転条件の一つとして決定することを特徴とする運転条件決定装置。
【請求項7】
静磁場を生成する励磁コイルと、前記励磁コイルによって生成された静磁場に設けられ、電磁力により駆動される駆動コイルと、前記駆動コイルの駆動力を供試体に伝えるための可動部と、を備えた振動発生機の運転条件を決定するため、コンピュータを、
可動部に供試体を装着し、所定の励磁電流を与え、供試体に所望の振動を与えるよう振動制御装置によって駆動電流を制御した場合における励磁コイルおよび駆動コイルの合計消費電力を取得する運転関連値取得手段、
前記励磁電流を順次減少させ、対応する合計消費電力の変化に基づいて、当該合計消費電力の極小値を見いだし、当該合計消費電力の極小値に対応する励磁電流を、少なくとも条件の一つとして含む運転条件を決定する運転条件決定手段、
として機能させるための運転条件決定プログラム。
【請求項8】
静磁場を生成する励磁コイルと、前記励磁コイルによって生成された静磁場に設けられ、電磁力により駆動される駆動コイルと、前記駆動コイルの駆動力を供試体に伝えるための可動部と、を備えた振動発生機の運転条件を決定するため、コンピュータを、
可動部に供試体を装着し、所定の励磁電流を与え、供試体に所望の振動を与えるよう駆動電流を制御した場合における運転関連値を取得する運転関連値取得手段、
前記励磁電流を順次変化させ、対応する運転関連値の変化に基づいて、所望の運転関連値を見いだし、当該所望の運転関連値に対応する励磁電流を、少なくとも条件の一つとして含む運転条件を決定する運転条件決定手段、
として機能させるための運転条件決定プログラム。
【請求項9】
請求項8の運転条件決定プログラムにおいて、
前記運転関連値は、励磁コイルおよび駆動コイルにおける消費電力であり、
前記所望の運転関連値は、最小の消費電力であることを特徴とする運転条件決定プログラム。
【請求項10】
請求項8の運転条件決定プログラムにおいて、
前記プログラムは、コンピュータを、さらに、励磁コイルまたは駆動コイルまたはその双方を冷却する冷却手段として機能させるものであり、
前記運転関連値は、励磁コイル、駆動コイルおよび冷却手段における消費電力であり、
前記所望の運転関連値は、前記励磁コイルおよび駆動コイルがともに制限温度内にあることを前提とした、最小の消費電力であることを特徴とする運転条件決定プログラム。
【請求項11】
請求項8の運転条件決定プログラムにおいて、
前記プログラムは、コンピュータを、さらに、励磁コイルまたは駆動コイルまたはその双方を冷却する冷却手段として機能させるものであり、
前記運転関連値は、冷却手段の発する騒音であり、
前記所望の運転関連値は、前記励磁コイルおよび駆動コイルがともに制限温度内にあることを前提とした、最小の騒音であることを特徴とする運転条件決定プログラム。
【請求項12】
請求項8の運転条件決定装置において、
前記プログラムは、コンピュータを、さらに、励磁コイルまたは駆動コイルまたはその双方を冷却する冷却手段として機能させるものであり、
前記運転条件決定手段は、励磁電流を決定した後、励磁コイルおよび駆動コイルの限界温度近傍の所定の温度を制限温度とし、励磁コイルの温度の制限温度に対する偏差と、駆動コイルの温度の制限温度に対する偏差との大きい方の偏差がゼロになるように、冷却手段の冷却能力を操作量としてフィードバック制御を行うことにより、冷却能力を運転条件の一つとして決定することを特徴とする運転条件決定プログラム。
【請求項13】
静磁場を生成する励磁コイルと、前記励磁コイルによって生成された静磁場に設けられ、電磁力により駆動される駆動コイルと、前記駆動コイルの駆動力を供試体に伝えるための可動部と、を備えた振動発生機の運転条件を決定する方法であって、
可動部に供試体を装着し、所定の励磁電流を与え、供試体に所望の振動を与えるよう駆動電流を制御した場合における運転関連値を取得し、
前記励磁電流を順次変化させ、対応する運転関連値の変化に基づいて、所望の運転関連値を見いだし、当該所望の運転関連値に対応する励磁電流を,少なくとも条件の一つとして含む運転条件を決定する運転条件決定方法。
【請求項14】
静磁場を生成する励磁コイルと、前記励磁コイルによって生成された静磁場に設けられ、電磁力により駆動される駆動コイルと、前記駆動コイルの駆動力を供試体に伝えるための可動部と、を備えた振動発生機の運転条件を決定するための運転条件決定装置であって、
可動部に供試体を装着し、所定の励磁電流を与え、供試体に所望の振動を与えるよう駆動電流を制御した場合における運転関連値を取得する運転関連値取得手段と、
前記運転関連値取得手段によって取得した運転関連値を表示する表示手段と、
前記表示された運転関連値を見た操作者によって操作され、励磁電流を変動させる励磁電流変動手段と、
を備えた運転条件決定装置。
【請求項15】
静磁場を生成する励磁コイルと、前記励磁コイルによって生成された静磁場に設けられ、電磁力により駆動される駆動コイルと、前記駆動コイルの駆動力を供試体に伝えるための可動部と、を備えた振動発生機の運転条件を決定する方法であって、
可動部に供試体を装着し、所定の励磁電流を与え、供試体に所望の振動を与えるよう駆動電流を制御した場合における運転関連値を取得し、
取得した運転関連値を表示し、
前記表示された運転関連値に応じて励磁電流を変動させることを特徴とする運転条件決定方法。
【図1】


【図2】
【図3】
【図4】
【図4a】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図4a】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2010−276424(P2010−276424A)
【公開日】平成22年12月9日(2010.12.9)
【国際特許分類】
【出願番号】特願2009−128073(P2009−128073)
【出願日】平成21年5月27日(2009.5.27)
【出願人】(000100676)IMV株式会社 (17)
【公開日】平成22年12月9日(2010.12.9)
【国際特許分類】
【出願日】平成21年5月27日(2009.5.27)
【出願人】(000100676)IMV株式会社 (17)
[ Back to top ]