
排土板及び排土装置
【課題】歩行型管理機を利用して、排土・整地作業が可能な排土板及び排土装置を提供する。
【解決手段】排土板30は、走行輪14,14'及び耕耘ロータ13が設けられた機体11を備える歩行型管理機10に装着され、この管理機の前進走行に伴って地面の土を排土する。排土板30は、歩行型管理機10の機体11に取り付けられる装着部31と、装着部31に接続されて歩行型管理機10の幅方向に延びて排土を歩行型管理機10の幅方向側方に移動させる排土板本体部50を有する。排土板本体部50の下部には、地面に対して略垂直方向に延びるエッジ部50aが形成される。排土装置1は、走行輪14の進行方向前側に耕耘ロータ13が設けられた歩行型管理機10と、この管理機の機体11に装着された排土板30とを備えてなる。
【解決手段】排土板30は、走行輪14,14'及び耕耘ロータ13が設けられた機体11を備える歩行型管理機10に装着され、この管理機の前進走行に伴って地面の土を排土する。排土板30は、歩行型管理機10の機体11に取り付けられる装着部31と、装着部31に接続されて歩行型管理機10の幅方向に延びて排土を歩行型管理機10の幅方向側方に移動させる排土板本体部50を有する。排土板本体部50の下部には、地面に対して略垂直方向に延びるエッジ部50aが形成される。排土装置1は、走行輪14の進行方向前側に耕耘ロータ13が設けられた歩行型管理機10と、この管理機の機体11に装着された排土板30とを備えてなる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、柑橘類を栽培する傾斜園地に作業通路を設ける際に使用される排土板及び排土装置に関する。
【背景技術】
【0002】
柑橘栽培はその多くが傾斜地で行われており、豊富な日照や良好な排水など高品質な果実生産に適しているが、平坦地に比べて傾斜地での作業負担は大きく、特に収穫果実の運搬作業の省力化の要望は大きい。そこで、運搬作業の省力化に対して単軌条運搬機(モノレール)の他に、軽トラックや運搬車を園内で利用する方法が行われている。この傾斜園地において運搬車を利用するためには、まず作業通路を整備することが必要であり、これまで、各種機械を利用した園内作業通路の整備技術が開発されてきたが、園地の傾斜や形状、大きさはまちまちであり、園地状況に応じた整備技術のメニュー作りが求められている。
【0003】
園内作業通路の整備技術としては、傾斜角度が25度までの傾斜園地を対象に、油圧ショベルを利用して掘削・整地を行い、幅1〜2mの園内道を整備する技術が開発されている。また、傾斜角度が25度を超える急峻傾斜地では、歩行型管理機による掘削と、人力(鍬)による排土・整地作業によって幅30〜50cmの作業道を等高線方向に設置する技術が開発されている。また、関連技術として、土を排土・整地する機構は、ブルドーザをはじめとする建設用機械(特許文献1参照)やモータグレーダと呼ばれる道路工事用機械など、一般に大型機械に備えられている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平8−184072号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
油圧ショベルを用いた作業道の整備は、1m以上の通路幅を確保する際に有効であるが、機械の操作、特に整地作業において熟練を要するため農家個人の利用には限界があり、小規模な園地の通路整備には手軽に活用できる技術ではない。また、建設用機械を用いた作業道の整備は、建設用機械が大型機械であるので、小規模な園地には不向きな技術である。
【0006】
一方、前述の歩行型管理機の利用は、小規模な園地においては有望であり、傾斜角度20度以下の園地では、通路幅を1m程度まで広げることができるので、油圧ショベルを用いなくともクローラ運搬車が等高線方向に走行できる通路を整備することができる。しかしながら、この管理機は掘削のみを目的とし、掘削土の排土・整地は人力で行うことを前提としているため、通路幅を1mにまで広げた場合には、排土する土の量が多大になり、鍬による人力の整地作業が重労働となるうえ作業能率も悪くなる。
【0007】
本発明は、このような課題に鑑みてなされたものであり、歩行型管理機を利用して、排土・整地作業が可能な排土板及び排土装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
このような課題を解決するため、本発明は、走行輪及び耕耘ロータが回転駆動可能に設けられた機体を備える歩行型管理機に装着され、該歩行型管理機の前進走行に伴って地面の土を排土する排土板であって、排土板は、歩行型管理機の機体に取り付けられる装着部と、該装着部に接続されて歩行型管理機の幅方向に延びて排土を該歩行型管理機の幅方向側方に移動させる排土板本体部を有し、排土板本体部の下部には、地面に対して略垂直方向に延びるエッジ部が設けられていることを特徴とする(請求項1)。
【0009】
また本発明の排土板本体部の下部には、該排土板本体部の進行方向後側に延びて地面に接する沈下防止部が設けられていることを特徴とする(請求項2)。
【0010】
また本発明の排土板本体部は、排土時の土を該排土板本体部の前面に沿って上方へせり上がらせるとともに排土板本体部の進行方向前側に回転させるように、上方へ進むに従って前方側に屈曲形成されていることを特徴とする(請求項3)。
【0011】
さらに本発明の排土板本体部は、その上部が装着部に回動自在に支持されるとともに、排土板本体部の後部と装着部との間に設けられた弾性部材(実施の形態における圧縮コイルばね72)を介して上下方向に弾性支持されていることを特徴とする(請求項4)。
【0012】
また本発明は、機体に設けられた走行輪の進行方向前側又は進行方向後側に耕耘ロータが設けられ、該走行輪の回転に伴って前進走行可能な歩行型管理機と、該歩行型管理機の機体に装着されて歩行型管理機の前進走行に伴って地面の土を排土する排土板とを備える排土装置であって、排土板は、走行輪の進行方向前側に設けられた耕耘ロータよりも進行方向前側の機体又は、走行輪の進行方向後側に設けられた耕耘ロータよりも進行方向後側の機体に着脱可能に装着されることを特徴とする(請求項5)。
【0013】
また本発明の排土板は、機体進行方向に対して交差する方向に延びた状態で歩行型管理機の機体に装着されることを特徴とする(請求項6)。
【0014】
また本発明の排土板は、歩行型管理機の機体に設けられた支持部に取り付けられる装着部を中心として機体進行方向に対して左右方向に回動自在に支持されて、歩行型管理機の前進走行に伴って左右方向左側に排土可能な左側作業位置と、歩行型管理機の前進走行に伴って左右方向右側に排土可能な右側作業位置との間を移動自在であることを特徴とする(請求項7)。
【0015】
また本発明の排土板は、左側作業位置又は右側作業位置に移動すると、該排土板の土を排出する側の端部が歩行型管理機の走行輪よりも外側に位置していることを特徴とする(請求項8)。
【発明の効果】
【0016】
本発明に係わる排土板及び排土装置は、前述した特徴を有することで、歩行型管理機を利用して、排土・整地作業が可能な排土板及び排土装置を提供することができる。
【図面の簡単な説明】
【0017】
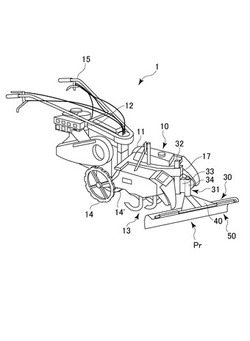
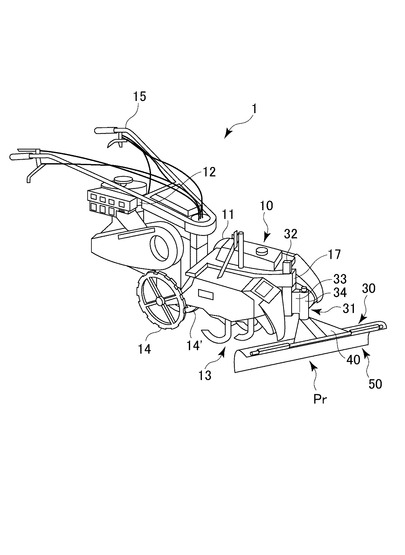
【図1】本発明の一実施形態に係わる排土装置の斜視図を示す。
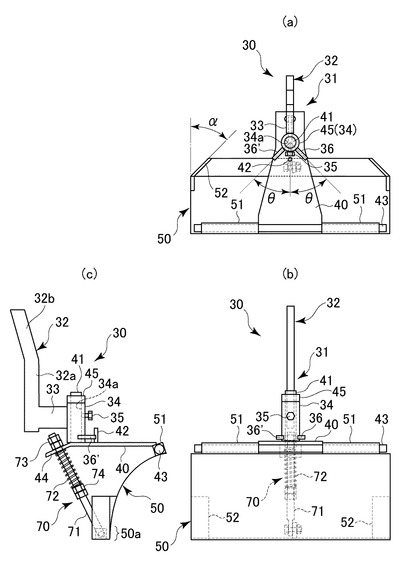
【図2】本発明の一実施形態に係わる排土板を示し、同図(a)は排土板の平面図であり、同図(b)は排土板の正面図であり、同図(c)は排土板の側面図を示す。
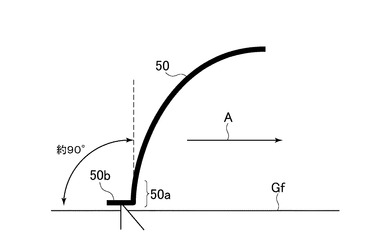
【図3】排土板の構造を説明するための説明図を示す。
【図4】排土板の構造を説明するための説明図を示す。
【図5】排土板の歩行型管理機に対する装着方向を説明するための排土装置の前側の部分斜視図を示す。
【図6】排土板の歩行型管理機に対する装着位置を説明するための排土装置の前側の部分平面図を示す。
【図7】排土装置の作用を説明するための排土装置の前側斜視図を示す。
【発明を実施するための形態】
【0018】
以下、本発明に係わる排土板及び排土装置の一実施形態を図1〜図7に基づいて説明する。先ず、本発明の排土板及び排土装置のうち、排土板を備える排土装置について、図1を参照しながら説明する。
【0019】
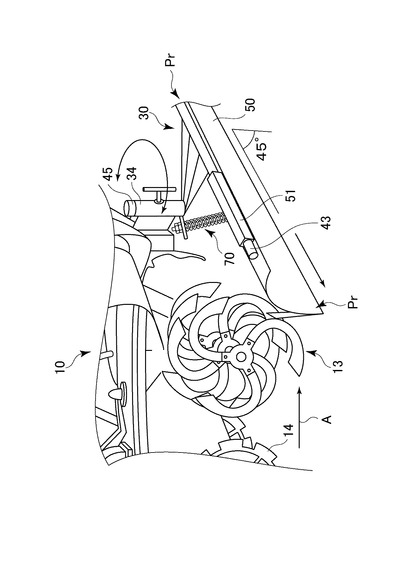
排土装置1は、図1に示すように、歩行型管理機10とこの前部に装着された排土板30とを有して構成されている。歩行型管理機10は、前後方向に延びる機体11と、機体11の後側上部に搭載されたエンジン12と、機体11の前側下部に回転自在に支持されてエンジン12の動力を受けて回転する耕耘ロータ13と、機体11の後側下部に回転自在に支持されてエンジン12の動力を受けて回転して機体幅方向両側に配設された一対の走行輪14,14'と、機体11の後側上部から後方側へ延びるハンドル15とを有してなる。
【0020】
歩行型管理機10は、走行輪14,14'の回転によって前進走行しながら、回転する耕耘ロータ13によって園地の土を耕耘し、作業者のハンドル15の操作によって向きが変えられる。
【0021】
歩行型管理機10の機体前側の幅方向中央部には、排土板30を取り付けるための支持部17が設けられている。支持部17は、上下方向に貫通する孔部を備えて筒状に形成され、孔部の断面形状は矩形状に形成されている。支持部17には図示しない止めねじが設けられ、この止めねじによって支持部17に挿通された排土板30の連結軸部32が支持部17に固定される。なお、この支持部17には、排土板30の他に、図示しない接地輪が装着されて耕耘ロータ13の耕耘深さ調整が可能である。
【0022】
次に、歩行型管理機10に装着される排土板30について、図1〜図4を参照しながら説明する。排土板30は、図1、図2(a)、図2(b)、図2(c)に示すように、歩行型管理機10の支持部17に取り付けられる装着部31と、装着部31に接続されて歩行型管理機10の幅方向に延びる排土板本体部50とを有してなる。
【0023】
装着部31は、歩行型管理機10の支持部17に挿着される前述した連結軸部32と、連結軸部32に回動可能に設けられた支持板部40とを有してなる。連結軸部32は、鉛直方向に延びる下側軸部32aと、下側軸部32aの上部に繋がって斜め上方へ延びる上側軸部32bを有して構成されている。連結軸部32は断面が矩形状に形成されて、支持部17の矩形状に形成された孔部に挿通可能である。このため、連結軸部32は支持部17の孔部に挿通可能であるが、孔部に対して回動させることができない。
【0024】
下側軸部32aの下部には前方へ突出するアーム部33が取り付けられ、アーム部33の先端部には上下方向へ延びる筒状の回動支持部34が設けられている。回動支持部34内には上下方向に貫通する孔部34aが設けられている。この孔部34aの断面は円形状に形成され、この孔部34aに支持板部40に設けられた回動軸部41が回動自在に挿通される。
【0025】
回動支持部34の上側には孔部34aに挿通された回動軸部41を固定するための止めねじ35が設けられている。また、回動支持部34の下側には、排土板本体部50の歩行型管理機10の機体幅方向(以下、左右方向と記す。)の傾き角度を調整するための一対の角度調整部材36,36'が設けられている。この角度調整部材36,36'は、板状に形成され、平面視において、矢印Aで示す機体進行方向に対して左右方向に所定角度θ(図面ではθ=45度)を有した位置に配置されている。この一対の角度調整部材36,36'に支持板部40の幅方向中央部に設けられた移動規制ピン42が当接することで、排土板本体部50を機体進行方向に対して左右方向に所定角度θ(45度)を有した位置に位置決めすることができる。
【0026】
即ち、一対の角度調整部材36,36'のうちの機体進行方向左側に配設された角度調整部材36に移動規制ピン42が当接すると、排土板本体部50は機体進行方向左側に傾いた状態になる。また、一対の角度調整部材36,36'のうちの機体進行方向右側に配設された角度調整部材36'に移動規制ピン42が当接すると、排土板本体部50は機体進行方向右側に傾いた状態になる。なお、角度調整部材36'に移動規制ピン42が当接して排土板本体部50が機体進行方向右側に傾いているときの排土板本体部50の位置を右側作業位置Pr(図1,図7参照)と記し、角度調整部材36に移動規制ピン42が当接して排土板本体部50が機体進行方向左側に傾いた状態にあるときの排土板本体部50の位置を左側作業位置と記す。
【0027】
なお、排土板本体部50が右側作業位置Pr又は左側作業位置に移動した状態で、止めねじ35によって回動軸部41を回動支持部34に固定することで、排土板本体部50を右側作業位置Pr又は左側作業位置に固定することができる。また、回動支持部34の上方には、回動軸部41の上部に固着された抜脱防止部材45が回動支持部34に接触した状態で配置されている。この抜脱防止部材45は、回動支持部34と同様に円筒状に形成され、内部の孔部に回動軸部41が挿通された状態で回動軸部41に一体的に固着されている。このため、回動軸部41が下方へ移動すると、抜脱防止部材45の下端面が回動支持部34の上端面に当接して、回動軸部41が回動支持部34の孔部34aから抜脱されるのを防止することができる。
【0028】
回動軸部41の下端部には支持板部40が一体的に固着されている。支持板部40は平面視において前後方向に延びた略矩形状に形成され、支持板部40の前側は支持板部幅方向に拡開している。この支持板部40の前端部に断面形状が円形の軸部43が支持板部40の幅方向に一体的に固着されている。軸部43は、支持板部40の前端部の両側から略同一長さを有して延出している。なお、支持板部40の後側の上面に前述した回動軸部41が固着されている。
【0029】
この軸部43に排土板本体部50が回動自在に支持される。排土板本体部50の軸部43に対する支持の構成については後述する。支持板部40の後側は下方に屈曲し、この下方へ折り曲げられた支持板部40に後述する附勢手段70が接続される。
【0030】
排土板本体部50は、金属材料(例えば、鉄、ステンレス等)で形成された長方形状の板材を側面視において上方に進むに従って前側に傾斜するように湾曲状に形成されている。
【0031】
排土板本体部50の上端部の幅方向両側には、上端部に沿って延びる一対の筒部51,51が設けられている。これらの筒部51,51は、略同じ長さを有し、排土板本体部50の上端部の幅方向中央部に対して対称的に配置されている。これらの筒部51,51に軸部43が回動自在に挿通される。このため、排土板本体部50は軸部43を中心として上下方向に回動自在に支持されている。
【0032】
これらの筒部51,51間に支持板部40の前端部が配置されている。このため、排土板本体部50が支持板部40に対して支持板部幅方向に移動しようとすると、支持板部40の前側端部が一対の筒部51,51のいずれかに当接して排土板本体部50の支持板部幅方向への移動が規制される。
【0033】
排土板本体部50の幅方向両端部の下側には、後方側へ延びる側方抵抗板52が設けられている。側方抵抗板52は排土板本体部50の斜め内側方向へ延びるように形成されている。図面では側方抵抗板52の排土板本体部50の幅方向端部に対する傾斜角度αは約45度である。この傾斜角度αは、排土板本体部50が進行方向に対して45度の角度を有して傾いた右側作業位置Pr又は左側作業位置に移動した状態で排土作業を行う場合に、側方抵抗板52が機体進行方向に沿うようにするために45度に設定されている。
【0034】
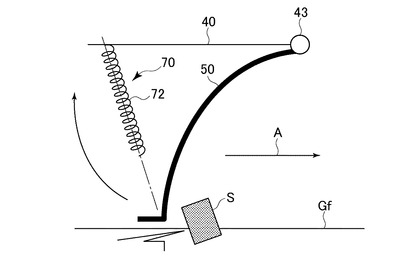
排土板本体部50の下部には、図2(c)、図3に示すように、地面Gfに対して略垂直方向に延びるエッジ部50aが形成されている。エッジ部50aの後部には、エッジ部50aに対して略直交して後方側に直線状に延びる沈下防止部50bが形成されている。この沈下防止部50bは板状に形成されて、地面Gfに面接触しながら地面Gf上を矢印A方向(図3参照)に移動する。
【0035】
この沈下防止部50bにより、排土作業中に排土板本体部50が未耕土部分に刺さったり、沈下したりすることを防止することができ、未耕土上を滑るように移動して、耕耘された耕土のみを移動させることができる。従って、排土板本体部50が受ける抵抗力を小さくすることができ、小型の歩行型管理機10の駆動力で十分に前進走行することができる。
【0036】
排土板本体部50と支持板部40との間には、図2(b)、図2(c)に示すように、附勢手段70が設けられている。附勢手段70は、下側が排土板本体部50の幅方向中央部の後面部に回動自在に接続され上側が支持板部40の後側に設けられた孔部44に挿通された軸部71と、軸部71に挿着された圧縮コイルばね72とを有してなる。軸部71はその上側が孔部44に移動自在に挿通され、軸部71の上側にはナット73が螺合されている。支持板部40の下面から下方へ延びる軸部71には圧縮コイルばね72が挿着され、圧縮コイルばね72の下端部は軸部71の軸方向中間部に螺合されたナット74に接触している。
【0037】
圧縮コイルばね72の附勢力は、ナット74の位置調整によって調整される。すなわち、ナット74を圧縮コイルばね72側に移動させると圧縮コイルばね72は縮小されて附勢力が増大する。またナット74の位置調整によって排土板本体部50が上方へ跳ね上げられるのに必要な初期抵抗力の調整をすることができる。一方、ナット73の位置調整によって、排土板本体部50の下部のエッジ部50aが地面に対して略垂直方向に延びるように排土板本体部50の姿勢を一定にすることができ、またナット73によって、軸部71の孔部44からの抜脱を規制することができる。
【0038】
このように、排土板本体部50は附勢手段70を介して支持されているので、図4に示すように、排土板本体部50が石等の障害物Sに衝突すると、排土板本体部50は圧縮コイルばね72の附勢に抗して軸部43を回動支点として後方側へ跳ね上がる。このため、排土板本体部50に過大な衝撃荷重が作用するのを防止して、排土板本体部50の損傷を未然に防止することができる。なお、圧縮コイルばね72は、その附勢力(抵抗力)が歩行型管理機10の推進力よりも小さく、且つ排土による抵抗力よりも大きい力になるように設定される。
【0039】
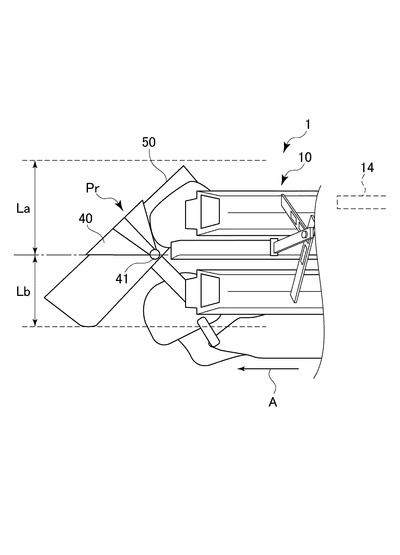
このように構成された排土板30の排土板本体部50は、前述したように、右側作業位置Prに移動すると、図5及び図6に示すように、機体進行方向に対して右側に約45度の角度を有して傾く(図5参照)。また、排土板本体部50が右側作業位置Prに移動すると、排土板本体部50の排出側の左右方向の長さLaが排土板本体部50の非排出側の長さLbよりも長くなるように移動して、排土板本体部50の土を排出する側の端部が歩行型管理機10の走行輪14よりも外側に位置する(図6参照)。
【0040】
なお、図示は省略するが、排土板本体部50を左側作業位置に移動させると、排土板本体部50を右側作業位置に移動させた場合と同様に、排土板本体部50の排出側の左右方向の長さLaが排土板本体部50の非排出側の長さLbよりも長くなり、排土板本体部50の土を排出する側の端部が歩行型管理機10の走行輪14'よりも外側に位置することになる。
【0041】
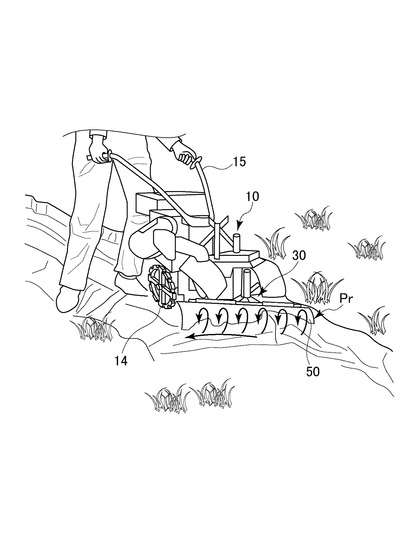
次に、歩行型管理機10に排土板30が装着された排土装置1によって、傾斜園地の等高線方向に作業通路を造成する場合について、図5〜図7を参照しながら説明する。先ず、歩行型管理機10に排土板30が装着されている場合には、排土板30を歩行型管理機10から取り外し、傾斜園地の作業通路を造成する作業現場に歩行型管理機10を移動させる。そして、歩行型管理機10を、傾斜園地の等高線の一側から等高線方向に沿って他側へ歩行型管理機10を前進走行させながら耕耘ロータ13によって作業通路となる傾斜園地の耕土を耕耘する。
【0042】
次に、図7に示すように、歩行型管理機10の前部に排土板30を装着し、排土板本体部50を装着部31に対して右側作業位置Pr又は左側作業位置に移動させて固定する。本実施例では、排土板30を右側作業位置Prに位置させた場合について説明する。排土装置1の歩行型管理機10を、耕耘された作業通路となる傾斜園地の他側から一側方向へ前進走行させると、歩行型管理機10の前進走行に伴って排土板本体部50が前側に移動し、耕耘された耕土は排土板本体部50の前面に沿って上方へせり上がるとともに機体進行方向前側に回転しながら、排土板本体部50の進行方向右側へ移動して、連続的に排出される。
【0043】
そして、排土装置1が作業通路となる一端側に移動すると、歩行型管理機10を停止させる。ここで、排土装置1による排土・整地作業が不十分な場合には、排土装置1の向きを反転させ、排土板本体部50を左側作業位置に移動させる。そして、歩行型管理機10を作業通路となる一端側から他端側に前進走行させながら、排土板本体部50が排土作業を行う。
【0044】
ここで、排土板本体部50は、図5に示すように、機体進行方向(矢印A方向)に対して約45度の角度を有して配置されているので、排土板本体部50の進行時には、耕土に対して排出方向成分の力が作用する。このため、排土板本体部50の湾曲形状による耕土の回転移動(図7参照)及びエッジ部50aの略垂直方向に延びる配置と相まって、排土板本体部50の進行方向前側に滞留する耕土の量を最小限にすることができる。このため、作業通路の幅方向の仕上がりが均一になるとともに、排土作業時の排土抵抗を低減することができ、排土作業時の排土装置1の直進安定性を向上させることができる。
【0045】
さらに、排土板30は、図6に示すように、右側作業位置Prに移動した状態で、排土板本体部50の排出側の左右方向の長さLaが排土板本体部50の非排出側の長さLbよりも長くなる(La>Lb)ので、歩行型管理機10の進行方向右側の走行輪14は排出された柔らかい排土上ではなく、排土された固い作業通路を走行する。このため、排土作業時の排土装置1の直進安定性をさらに向上させることができる。
【0046】
なお、前述した実施例では、図1に示すように、走行輪14の前方に耕耘ロータ13を備える歩行型管理機10を例にして説明したが、走行輪14の後方に耕耘ロータ13を備える歩行型管理機でもよい。この場合には、排土板30は、耕耘ロータの進行方向後側に設けられる。
【0047】
また、排土板30の排土板本体部50は側面視において湾曲した形状を示したが、排土板本体部50は、直線状に延びる板部材を所定間隔を有して複数段に折り曲げ形成して全体として湾曲状に形成されたものでもよい。
【符号の説明】
【0048】
1 排土装置
10 歩行型管理機
11 機体
13 耕耘ロータ
14、14' 走行輪
17 支持部
30 排土板
31 装着部
50 排土板本体部
50a エッジ部
50b 沈下防止部
72 圧縮コイルばね(弾性部材)
【技術分野】
【0001】
本発明は、柑橘類を栽培する傾斜園地に作業通路を設ける際に使用される排土板及び排土装置に関する。
【背景技術】
【0002】
柑橘栽培はその多くが傾斜地で行われており、豊富な日照や良好な排水など高品質な果実生産に適しているが、平坦地に比べて傾斜地での作業負担は大きく、特に収穫果実の運搬作業の省力化の要望は大きい。そこで、運搬作業の省力化に対して単軌条運搬機(モノレール)の他に、軽トラックや運搬車を園内で利用する方法が行われている。この傾斜園地において運搬車を利用するためには、まず作業通路を整備することが必要であり、これまで、各種機械を利用した園内作業通路の整備技術が開発されてきたが、園地の傾斜や形状、大きさはまちまちであり、園地状況に応じた整備技術のメニュー作りが求められている。
【0003】
園内作業通路の整備技術としては、傾斜角度が25度までの傾斜園地を対象に、油圧ショベルを利用して掘削・整地を行い、幅1〜2mの園内道を整備する技術が開発されている。また、傾斜角度が25度を超える急峻傾斜地では、歩行型管理機による掘削と、人力(鍬)による排土・整地作業によって幅30〜50cmの作業道を等高線方向に設置する技術が開発されている。また、関連技術として、土を排土・整地する機構は、ブルドーザをはじめとする建設用機械(特許文献1参照)やモータグレーダと呼ばれる道路工事用機械など、一般に大型機械に備えられている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平8−184072号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
油圧ショベルを用いた作業道の整備は、1m以上の通路幅を確保する際に有効であるが、機械の操作、特に整地作業において熟練を要するため農家個人の利用には限界があり、小規模な園地の通路整備には手軽に活用できる技術ではない。また、建設用機械を用いた作業道の整備は、建設用機械が大型機械であるので、小規模な園地には不向きな技術である。
【0006】
一方、前述の歩行型管理機の利用は、小規模な園地においては有望であり、傾斜角度20度以下の園地では、通路幅を1m程度まで広げることができるので、油圧ショベルを用いなくともクローラ運搬車が等高線方向に走行できる通路を整備することができる。しかしながら、この管理機は掘削のみを目的とし、掘削土の排土・整地は人力で行うことを前提としているため、通路幅を1mにまで広げた場合には、排土する土の量が多大になり、鍬による人力の整地作業が重労働となるうえ作業能率も悪くなる。
【0007】
本発明は、このような課題に鑑みてなされたものであり、歩行型管理機を利用して、排土・整地作業が可能な排土板及び排土装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
このような課題を解決するため、本発明は、走行輪及び耕耘ロータが回転駆動可能に設けられた機体を備える歩行型管理機に装着され、該歩行型管理機の前進走行に伴って地面の土を排土する排土板であって、排土板は、歩行型管理機の機体に取り付けられる装着部と、該装着部に接続されて歩行型管理機の幅方向に延びて排土を該歩行型管理機の幅方向側方に移動させる排土板本体部を有し、排土板本体部の下部には、地面に対して略垂直方向に延びるエッジ部が設けられていることを特徴とする(請求項1)。
【0009】
また本発明の排土板本体部の下部には、該排土板本体部の進行方向後側に延びて地面に接する沈下防止部が設けられていることを特徴とする(請求項2)。
【0010】
また本発明の排土板本体部は、排土時の土を該排土板本体部の前面に沿って上方へせり上がらせるとともに排土板本体部の進行方向前側に回転させるように、上方へ進むに従って前方側に屈曲形成されていることを特徴とする(請求項3)。
【0011】
さらに本発明の排土板本体部は、その上部が装着部に回動自在に支持されるとともに、排土板本体部の後部と装着部との間に設けられた弾性部材(実施の形態における圧縮コイルばね72)を介して上下方向に弾性支持されていることを特徴とする(請求項4)。
【0012】
また本発明は、機体に設けられた走行輪の進行方向前側又は進行方向後側に耕耘ロータが設けられ、該走行輪の回転に伴って前進走行可能な歩行型管理機と、該歩行型管理機の機体に装着されて歩行型管理機の前進走行に伴って地面の土を排土する排土板とを備える排土装置であって、排土板は、走行輪の進行方向前側に設けられた耕耘ロータよりも進行方向前側の機体又は、走行輪の進行方向後側に設けられた耕耘ロータよりも進行方向後側の機体に着脱可能に装着されることを特徴とする(請求項5)。
【0013】
また本発明の排土板は、機体進行方向に対して交差する方向に延びた状態で歩行型管理機の機体に装着されることを特徴とする(請求項6)。
【0014】
また本発明の排土板は、歩行型管理機の機体に設けられた支持部に取り付けられる装着部を中心として機体進行方向に対して左右方向に回動自在に支持されて、歩行型管理機の前進走行に伴って左右方向左側に排土可能な左側作業位置と、歩行型管理機の前進走行に伴って左右方向右側に排土可能な右側作業位置との間を移動自在であることを特徴とする(請求項7)。
【0015】
また本発明の排土板は、左側作業位置又は右側作業位置に移動すると、該排土板の土を排出する側の端部が歩行型管理機の走行輪よりも外側に位置していることを特徴とする(請求項8)。
【発明の効果】
【0016】
本発明に係わる排土板及び排土装置は、前述した特徴を有することで、歩行型管理機を利用して、排土・整地作業が可能な排土板及び排土装置を提供することができる。
【図面の簡単な説明】
【0017】
【図1】本発明の一実施形態に係わる排土装置の斜視図を示す。
【図2】本発明の一実施形態に係わる排土板を示し、同図(a)は排土板の平面図であり、同図(b)は排土板の正面図であり、同図(c)は排土板の側面図を示す。
【図3】排土板の構造を説明するための説明図を示す。
【図4】排土板の構造を説明するための説明図を示す。
【図5】排土板の歩行型管理機に対する装着方向を説明するための排土装置の前側の部分斜視図を示す。
【図6】排土板の歩行型管理機に対する装着位置を説明するための排土装置の前側の部分平面図を示す。
【図7】排土装置の作用を説明するための排土装置の前側斜視図を示す。
【発明を実施するための形態】
【0018】
以下、本発明に係わる排土板及び排土装置の一実施形態を図1〜図7に基づいて説明する。先ず、本発明の排土板及び排土装置のうち、排土板を備える排土装置について、図1を参照しながら説明する。
【0019】
排土装置1は、図1に示すように、歩行型管理機10とこの前部に装着された排土板30とを有して構成されている。歩行型管理機10は、前後方向に延びる機体11と、機体11の後側上部に搭載されたエンジン12と、機体11の前側下部に回転自在に支持されてエンジン12の動力を受けて回転する耕耘ロータ13と、機体11の後側下部に回転自在に支持されてエンジン12の動力を受けて回転して機体幅方向両側に配設された一対の走行輪14,14'と、機体11の後側上部から後方側へ延びるハンドル15とを有してなる。
【0020】
歩行型管理機10は、走行輪14,14'の回転によって前進走行しながら、回転する耕耘ロータ13によって園地の土を耕耘し、作業者のハンドル15の操作によって向きが変えられる。
【0021】
歩行型管理機10の機体前側の幅方向中央部には、排土板30を取り付けるための支持部17が設けられている。支持部17は、上下方向に貫通する孔部を備えて筒状に形成され、孔部の断面形状は矩形状に形成されている。支持部17には図示しない止めねじが設けられ、この止めねじによって支持部17に挿通された排土板30の連結軸部32が支持部17に固定される。なお、この支持部17には、排土板30の他に、図示しない接地輪が装着されて耕耘ロータ13の耕耘深さ調整が可能である。
【0022】
次に、歩行型管理機10に装着される排土板30について、図1〜図4を参照しながら説明する。排土板30は、図1、図2(a)、図2(b)、図2(c)に示すように、歩行型管理機10の支持部17に取り付けられる装着部31と、装着部31に接続されて歩行型管理機10の幅方向に延びる排土板本体部50とを有してなる。
【0023】
装着部31は、歩行型管理機10の支持部17に挿着される前述した連結軸部32と、連結軸部32に回動可能に設けられた支持板部40とを有してなる。連結軸部32は、鉛直方向に延びる下側軸部32aと、下側軸部32aの上部に繋がって斜め上方へ延びる上側軸部32bを有して構成されている。連結軸部32は断面が矩形状に形成されて、支持部17の矩形状に形成された孔部に挿通可能である。このため、連結軸部32は支持部17の孔部に挿通可能であるが、孔部に対して回動させることができない。
【0024】
下側軸部32aの下部には前方へ突出するアーム部33が取り付けられ、アーム部33の先端部には上下方向へ延びる筒状の回動支持部34が設けられている。回動支持部34内には上下方向に貫通する孔部34aが設けられている。この孔部34aの断面は円形状に形成され、この孔部34aに支持板部40に設けられた回動軸部41が回動自在に挿通される。
【0025】
回動支持部34の上側には孔部34aに挿通された回動軸部41を固定するための止めねじ35が設けられている。また、回動支持部34の下側には、排土板本体部50の歩行型管理機10の機体幅方向(以下、左右方向と記す。)の傾き角度を調整するための一対の角度調整部材36,36'が設けられている。この角度調整部材36,36'は、板状に形成され、平面視において、矢印Aで示す機体進行方向に対して左右方向に所定角度θ(図面ではθ=45度)を有した位置に配置されている。この一対の角度調整部材36,36'に支持板部40の幅方向中央部に設けられた移動規制ピン42が当接することで、排土板本体部50を機体進行方向に対して左右方向に所定角度θ(45度)を有した位置に位置決めすることができる。
【0026】
即ち、一対の角度調整部材36,36'のうちの機体進行方向左側に配設された角度調整部材36に移動規制ピン42が当接すると、排土板本体部50は機体進行方向左側に傾いた状態になる。また、一対の角度調整部材36,36'のうちの機体進行方向右側に配設された角度調整部材36'に移動規制ピン42が当接すると、排土板本体部50は機体進行方向右側に傾いた状態になる。なお、角度調整部材36'に移動規制ピン42が当接して排土板本体部50が機体進行方向右側に傾いているときの排土板本体部50の位置を右側作業位置Pr(図1,図7参照)と記し、角度調整部材36に移動規制ピン42が当接して排土板本体部50が機体進行方向左側に傾いた状態にあるときの排土板本体部50の位置を左側作業位置と記す。
【0027】
なお、排土板本体部50が右側作業位置Pr又は左側作業位置に移動した状態で、止めねじ35によって回動軸部41を回動支持部34に固定することで、排土板本体部50を右側作業位置Pr又は左側作業位置に固定することができる。また、回動支持部34の上方には、回動軸部41の上部に固着された抜脱防止部材45が回動支持部34に接触した状態で配置されている。この抜脱防止部材45は、回動支持部34と同様に円筒状に形成され、内部の孔部に回動軸部41が挿通された状態で回動軸部41に一体的に固着されている。このため、回動軸部41が下方へ移動すると、抜脱防止部材45の下端面が回動支持部34の上端面に当接して、回動軸部41が回動支持部34の孔部34aから抜脱されるのを防止することができる。
【0028】
回動軸部41の下端部には支持板部40が一体的に固着されている。支持板部40は平面視において前後方向に延びた略矩形状に形成され、支持板部40の前側は支持板部幅方向に拡開している。この支持板部40の前端部に断面形状が円形の軸部43が支持板部40の幅方向に一体的に固着されている。軸部43は、支持板部40の前端部の両側から略同一長さを有して延出している。なお、支持板部40の後側の上面に前述した回動軸部41が固着されている。
【0029】
この軸部43に排土板本体部50が回動自在に支持される。排土板本体部50の軸部43に対する支持の構成については後述する。支持板部40の後側は下方に屈曲し、この下方へ折り曲げられた支持板部40に後述する附勢手段70が接続される。
【0030】
排土板本体部50は、金属材料(例えば、鉄、ステンレス等)で形成された長方形状の板材を側面視において上方に進むに従って前側に傾斜するように湾曲状に形成されている。
【0031】
排土板本体部50の上端部の幅方向両側には、上端部に沿って延びる一対の筒部51,51が設けられている。これらの筒部51,51は、略同じ長さを有し、排土板本体部50の上端部の幅方向中央部に対して対称的に配置されている。これらの筒部51,51に軸部43が回動自在に挿通される。このため、排土板本体部50は軸部43を中心として上下方向に回動自在に支持されている。
【0032】
これらの筒部51,51間に支持板部40の前端部が配置されている。このため、排土板本体部50が支持板部40に対して支持板部幅方向に移動しようとすると、支持板部40の前側端部が一対の筒部51,51のいずれかに当接して排土板本体部50の支持板部幅方向への移動が規制される。
【0033】
排土板本体部50の幅方向両端部の下側には、後方側へ延びる側方抵抗板52が設けられている。側方抵抗板52は排土板本体部50の斜め内側方向へ延びるように形成されている。図面では側方抵抗板52の排土板本体部50の幅方向端部に対する傾斜角度αは約45度である。この傾斜角度αは、排土板本体部50が進行方向に対して45度の角度を有して傾いた右側作業位置Pr又は左側作業位置に移動した状態で排土作業を行う場合に、側方抵抗板52が機体進行方向に沿うようにするために45度に設定されている。
【0034】
排土板本体部50の下部には、図2(c)、図3に示すように、地面Gfに対して略垂直方向に延びるエッジ部50aが形成されている。エッジ部50aの後部には、エッジ部50aに対して略直交して後方側に直線状に延びる沈下防止部50bが形成されている。この沈下防止部50bは板状に形成されて、地面Gfに面接触しながら地面Gf上を矢印A方向(図3参照)に移動する。
【0035】
この沈下防止部50bにより、排土作業中に排土板本体部50が未耕土部分に刺さったり、沈下したりすることを防止することができ、未耕土上を滑るように移動して、耕耘された耕土のみを移動させることができる。従って、排土板本体部50が受ける抵抗力を小さくすることができ、小型の歩行型管理機10の駆動力で十分に前進走行することができる。
【0036】
排土板本体部50と支持板部40との間には、図2(b)、図2(c)に示すように、附勢手段70が設けられている。附勢手段70は、下側が排土板本体部50の幅方向中央部の後面部に回動自在に接続され上側が支持板部40の後側に設けられた孔部44に挿通された軸部71と、軸部71に挿着された圧縮コイルばね72とを有してなる。軸部71はその上側が孔部44に移動自在に挿通され、軸部71の上側にはナット73が螺合されている。支持板部40の下面から下方へ延びる軸部71には圧縮コイルばね72が挿着され、圧縮コイルばね72の下端部は軸部71の軸方向中間部に螺合されたナット74に接触している。
【0037】
圧縮コイルばね72の附勢力は、ナット74の位置調整によって調整される。すなわち、ナット74を圧縮コイルばね72側に移動させると圧縮コイルばね72は縮小されて附勢力が増大する。またナット74の位置調整によって排土板本体部50が上方へ跳ね上げられるのに必要な初期抵抗力の調整をすることができる。一方、ナット73の位置調整によって、排土板本体部50の下部のエッジ部50aが地面に対して略垂直方向に延びるように排土板本体部50の姿勢を一定にすることができ、またナット73によって、軸部71の孔部44からの抜脱を規制することができる。
【0038】
このように、排土板本体部50は附勢手段70を介して支持されているので、図4に示すように、排土板本体部50が石等の障害物Sに衝突すると、排土板本体部50は圧縮コイルばね72の附勢に抗して軸部43を回動支点として後方側へ跳ね上がる。このため、排土板本体部50に過大な衝撃荷重が作用するのを防止して、排土板本体部50の損傷を未然に防止することができる。なお、圧縮コイルばね72は、その附勢力(抵抗力)が歩行型管理機10の推進力よりも小さく、且つ排土による抵抗力よりも大きい力になるように設定される。
【0039】
このように構成された排土板30の排土板本体部50は、前述したように、右側作業位置Prに移動すると、図5及び図6に示すように、機体進行方向に対して右側に約45度の角度を有して傾く(図5参照)。また、排土板本体部50が右側作業位置Prに移動すると、排土板本体部50の排出側の左右方向の長さLaが排土板本体部50の非排出側の長さLbよりも長くなるように移動して、排土板本体部50の土を排出する側の端部が歩行型管理機10の走行輪14よりも外側に位置する(図6参照)。
【0040】
なお、図示は省略するが、排土板本体部50を左側作業位置に移動させると、排土板本体部50を右側作業位置に移動させた場合と同様に、排土板本体部50の排出側の左右方向の長さLaが排土板本体部50の非排出側の長さLbよりも長くなり、排土板本体部50の土を排出する側の端部が歩行型管理機10の走行輪14'よりも外側に位置することになる。
【0041】
次に、歩行型管理機10に排土板30が装着された排土装置1によって、傾斜園地の等高線方向に作業通路を造成する場合について、図5〜図7を参照しながら説明する。先ず、歩行型管理機10に排土板30が装着されている場合には、排土板30を歩行型管理機10から取り外し、傾斜園地の作業通路を造成する作業現場に歩行型管理機10を移動させる。そして、歩行型管理機10を、傾斜園地の等高線の一側から等高線方向に沿って他側へ歩行型管理機10を前進走行させながら耕耘ロータ13によって作業通路となる傾斜園地の耕土を耕耘する。
【0042】
次に、図7に示すように、歩行型管理機10の前部に排土板30を装着し、排土板本体部50を装着部31に対して右側作業位置Pr又は左側作業位置に移動させて固定する。本実施例では、排土板30を右側作業位置Prに位置させた場合について説明する。排土装置1の歩行型管理機10を、耕耘された作業通路となる傾斜園地の他側から一側方向へ前進走行させると、歩行型管理機10の前進走行に伴って排土板本体部50が前側に移動し、耕耘された耕土は排土板本体部50の前面に沿って上方へせり上がるとともに機体進行方向前側に回転しながら、排土板本体部50の進行方向右側へ移動して、連続的に排出される。
【0043】
そして、排土装置1が作業通路となる一端側に移動すると、歩行型管理機10を停止させる。ここで、排土装置1による排土・整地作業が不十分な場合には、排土装置1の向きを反転させ、排土板本体部50を左側作業位置に移動させる。そして、歩行型管理機10を作業通路となる一端側から他端側に前進走行させながら、排土板本体部50が排土作業を行う。
【0044】
ここで、排土板本体部50は、図5に示すように、機体進行方向(矢印A方向)に対して約45度の角度を有して配置されているので、排土板本体部50の進行時には、耕土に対して排出方向成分の力が作用する。このため、排土板本体部50の湾曲形状による耕土の回転移動(図7参照)及びエッジ部50aの略垂直方向に延びる配置と相まって、排土板本体部50の進行方向前側に滞留する耕土の量を最小限にすることができる。このため、作業通路の幅方向の仕上がりが均一になるとともに、排土作業時の排土抵抗を低減することができ、排土作業時の排土装置1の直進安定性を向上させることができる。
【0045】
さらに、排土板30は、図6に示すように、右側作業位置Prに移動した状態で、排土板本体部50の排出側の左右方向の長さLaが排土板本体部50の非排出側の長さLbよりも長くなる(La>Lb)ので、歩行型管理機10の進行方向右側の走行輪14は排出された柔らかい排土上ではなく、排土された固い作業通路を走行する。このため、排土作業時の排土装置1の直進安定性をさらに向上させることができる。
【0046】
なお、前述した実施例では、図1に示すように、走行輪14の前方に耕耘ロータ13を備える歩行型管理機10を例にして説明したが、走行輪14の後方に耕耘ロータ13を備える歩行型管理機でもよい。この場合には、排土板30は、耕耘ロータの進行方向後側に設けられる。
【0047】
また、排土板30の排土板本体部50は側面視において湾曲した形状を示したが、排土板本体部50は、直線状に延びる板部材を所定間隔を有して複数段に折り曲げ形成して全体として湾曲状に形成されたものでもよい。
【符号の説明】
【0048】
1 排土装置
10 歩行型管理機
11 機体
13 耕耘ロータ
14、14' 走行輪
17 支持部
30 排土板
31 装着部
50 排土板本体部
50a エッジ部
50b 沈下防止部
72 圧縮コイルばね(弾性部材)
【特許請求の範囲】
【請求項1】
走行輪及び耕耘ロータが回転駆動可能に設けられた機体を備える歩行型管理機に装着され、該歩行型管理機の前進走行に伴って地面の土を排土する排土板であって、
前記排土板は、前記歩行型管理機の前記機体に取り付けられる装着部と、該装着部に接続されて前記歩行型管理機の幅方向に延びて排土を該歩行型管理機の幅方向側方に移動させる排土板本体部を有し、
前記排土板本体部の下部には、前記地面に対して略垂直方向に延びるエッジ部が形成されている
ことを特徴とする排土板。
【請求項2】
前記排土板本体部の下部には、該排土板本体部の進行方向後側に延びて地面に接する沈下防止部が設けられている
ことを特徴とする請求項1に記載の排土板。
【請求項3】
前記排土板本体部は、排土時の土を該排土板本体部の前面に沿って上方へせり上がらせるとともに前記排土板本体部の進行方向前側に回転させるように、上方へ進むに従って前方側に屈曲形成されていることを特徴とする請求項1又は2に記載の排土板。
【請求項4】
前記排土板本体部は、その上部が前記装着部に回動自在に支持されるとともに、前記排土板本体部の後部と前記装着部との間に設けられた弾性部材を介して上下方向に弾性支持されている
ことを特徴とする請求項3に記載の排土板。
【請求項5】
機体に設けられた走行輪の進行方向前側又は進行方向後側に耕耘ロータが設けられ、該走行輪の回転に伴って前進走行可能な歩行型管理機と、該歩行型管理機の前記機体に装着されて前記歩行型管理機の前進走行に伴って地面の土を排土する排土板とを備える排土装置であって、
前記排土板は、前記走行輪の進行方向前側に設けられた耕耘ロータよりも進行方向前側の機体又は、前記走行輪の進行方向後側に設けられた耕耘ロータよりも進行方向後側の機体に着脱可能に装着される
ことを特徴とする排土装置。
【請求項6】
前記排土板は、機体進行方向に対して交差する方向に延びた状態で前記歩行型管理機の前記機体に装着される
ことを特徴とする請求項5に記載の排土装置。
【請求項7】
前記排土板は、前記歩行型管理機の前記機体に設けられた支持部に取り付けられる装着部を中心として機体進行方向に対して左右方向に回動自在に支持されて、前記歩行型管理機の前進走行に伴って左右方向左側に排土可能な左側作業位置と、前記歩行型管理機の前進走行に伴って左右方向右側に排土可能な右側作業位置との間を移動自在である
ことを特徴とする請求項6に記載の排土装置。
【請求項8】
前記排土板は、前記左側作業位置又は前記右側作業位置に移動すると、該排土板による土の排出側の端部が前記歩行型管理機の前記走行輪よりも外側に位置する
ことを特徴とする請求項7に記載の排土装置。
【請求項1】
走行輪及び耕耘ロータが回転駆動可能に設けられた機体を備える歩行型管理機に装着され、該歩行型管理機の前進走行に伴って地面の土を排土する排土板であって、
前記排土板は、前記歩行型管理機の前記機体に取り付けられる装着部と、該装着部に接続されて前記歩行型管理機の幅方向に延びて排土を該歩行型管理機の幅方向側方に移動させる排土板本体部を有し、
前記排土板本体部の下部には、前記地面に対して略垂直方向に延びるエッジ部が形成されている
ことを特徴とする排土板。
【請求項2】
前記排土板本体部の下部には、該排土板本体部の進行方向後側に延びて地面に接する沈下防止部が設けられている
ことを特徴とする請求項1に記載の排土板。
【請求項3】
前記排土板本体部は、排土時の土を該排土板本体部の前面に沿って上方へせり上がらせるとともに前記排土板本体部の進行方向前側に回転させるように、上方へ進むに従って前方側に屈曲形成されていることを特徴とする請求項1又は2に記載の排土板。
【請求項4】
前記排土板本体部は、その上部が前記装着部に回動自在に支持されるとともに、前記排土板本体部の後部と前記装着部との間に設けられた弾性部材を介して上下方向に弾性支持されている
ことを特徴とする請求項3に記載の排土板。
【請求項5】
機体に設けられた走行輪の進行方向前側又は進行方向後側に耕耘ロータが設けられ、該走行輪の回転に伴って前進走行可能な歩行型管理機と、該歩行型管理機の前記機体に装着されて前記歩行型管理機の前進走行に伴って地面の土を排土する排土板とを備える排土装置であって、
前記排土板は、前記走行輪の進行方向前側に設けられた耕耘ロータよりも進行方向前側の機体又は、前記走行輪の進行方向後側に設けられた耕耘ロータよりも進行方向後側の機体に着脱可能に装着される
ことを特徴とする排土装置。
【請求項6】
前記排土板は、機体進行方向に対して交差する方向に延びた状態で前記歩行型管理機の前記機体に装着される
ことを特徴とする請求項5に記載の排土装置。
【請求項7】
前記排土板は、前記歩行型管理機の前記機体に設けられた支持部に取り付けられる装着部を中心として機体進行方向に対して左右方向に回動自在に支持されて、前記歩行型管理機の前進走行に伴って左右方向左側に排土可能な左側作業位置と、前記歩行型管理機の前進走行に伴って左右方向右側に排土可能な右側作業位置との間を移動自在である
ことを特徴とする請求項6に記載の排土装置。
【請求項8】
前記排土板は、前記左側作業位置又は前記右側作業位置に移動すると、該排土板による土の排出側の端部が前記歩行型管理機の前記走行輪よりも外側に位置する
ことを特徴とする請求項7に記載の排土装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−85510(P2013−85510A)
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願番号】特願2011−228460(P2011−228460)
【出願日】平成23年10月18日(2011.10.18)
【出願人】(501203344)独立行政法人農業・食品産業技術総合研究機構 (827)
【Fターム(参考)】
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願日】平成23年10月18日(2011.10.18)
【出願人】(501203344)独立行政法人農業・食品産業技術総合研究機構 (827)
【Fターム(参考)】
[ Back to top ]