
撮像装置、焦点自動調節方法
【課題】高周波ノイズの影響を考慮した山登り方式のオートフォーカス制御を効率的かつ精度良く行える電子カメラの提供。
【解決手段】デジタルビデオカメラ10は、初期化処理中に映像信号の黒レベルを取得しておく。そして、オートフォーカス処理を開始すると、現在のコンペンセータレンズ150の位置におけるAF評価値及び輝度評価値を取得し、AF評価値最大値とその時のコンペンセータレンズ150の位置を更新する。また、AGCゲインを取得し、これと輝度評価値と黒レベルとを用いて、AF評価値のオフセット値を算出し、その値とAF評価値最大値とに基づいて閾値を算出する。AF評価値が閾値よりも小さくなれば、AF評価値最大値を検出したレンズ位置を合焦位置として制御する。一方、閾値以上であれば、コンペンセータレンズ150を所定ステップ数だけ移動させて、再度、上述の処理を行う。
【解決手段】デジタルビデオカメラ10は、初期化処理中に映像信号の黒レベルを取得しておく。そして、オートフォーカス処理を開始すると、現在のコンペンセータレンズ150の位置におけるAF評価値及び輝度評価値を取得し、AF評価値最大値とその時のコンペンセータレンズ150の位置を更新する。また、AGCゲインを取得し、これと輝度評価値と黒レベルとを用いて、AF評価値のオフセット値を算出し、その値とAF評価値最大値とに基づいて閾値を算出する。AF評価値が閾値よりも小さくなれば、AF評価値最大値を検出したレンズ位置を合焦位置として制御する。一方、閾値以上であれば、コンペンセータレンズ150を所定ステップ数だけ移動させて、再度、上述の処理を行う。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、合焦位置を調整可能な光学系を介して得られた光学像を撮像手段により映像信号に変換する撮像装置のオートフォーカス技術に関する。
【背景技術】
【0002】
近年、デジタル技術の発展に伴い、デジタルビデオカメラなどの電子カメラが普及している。これらの電子カメラには、通常、被写体に対してフォーカスレンズを自動合焦させるオートフォーカス機構が設けられている。このようなオートフォーカス機構のひとつに、いわゆる山登り方式と呼ばれる方式がある。この山登り方式では、フォーカスレンズの位置を光軸方向に前後に動作させながら、CCDなどの撮像素子から得られる輝度信号の高周波成分を検波回路で検波した評価値(以下、「AF評価値」という)を取得し、このAF評価値がピークとなるフォーカスレンズの位置が合焦位置であるとしてフォーカスレンズの位置が制御される。このように高周波成分を合焦評価に用いるのは、撮像画像のエッジを形成する部分は高周波成分を多く含むので、同じ被写界から得られた撮像画像であれば、AF評価値が大きいほどエッジが強い、すなわち合焦度が高いといえるからである。こうした制御機構を備えた電子カメラとしては、例えば、下記文献のものが知られている。
【0003】
【特許文献1】特開平1−125065号公報
【特許文献2】特開平7−87377号公報
【特許文献3】特開2006−79069号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、こうした山登り方式のAF評価値には、高周波ノイズが含まれてしまうため、正確なオートフォーカス制御が行えないことがあった。そこで、このノイズの影響を考慮したフォーカスレンズ制御を効率的かつ精度良く行える技術が求められていた。
【課題を解決するための手段】
【0005】
上記課題を解決する本発明の撮像装置は、
合焦位置を調整可能な光学系を介して得られた光学像を撮像手段により映像信号に変換する撮像装置であって、
前記映像信号を撮像条件によって制御された所定のゲインで調整し、該調整された映像信号から、少なくとも、前記光学系を介して得られた光学像が合焦した際に得られる高周波成分を含む帯域の信号の強度を検出する高周波成分抽出手段と、
前記光学系を介して得られた光学像が合焦していない際に前記検出された信号の強度をオフセット値として学習する学習手段と、
前記学習されたオフセット値を参照することにより、前記検出された信号の強度がピークとなる前記光学系の調整方向を推定し、該光学系を合焦の状態に制御する光学系制御手段と
を備えたことを要旨とする。
【0006】
かかる構成の撮像装置は、光学像が合焦していない際に検出された信号の強度をオフセット値として学習し、このオフセット値を参照して、検出された信号の強度がピークとなる光学系の調整方向を推定し、該光学系を合焦の状態に制御するので、ノイズの影響を受けやすい低コントラスト、低照度の被写界であっても、精度の高いオートフォーカス制御が行える。
【0007】
また、かかる構成の撮像装置において、光学系制御手段は、光学系を合焦の位置に制御する際、検出された信号の強度のピークを、学習されたオフセット値を参照して特定し、該信号の強度がピークとなるように、光学系の合焦の状態を特定する合焦状態特定手段を有し、該特定された合焦の状態に前記光学系を制御するものとしてもよい。
【0008】
このような構成によれば、信号のピークを、オフセット値を参照して特定し、信号強度がピークとなる合焦の状態に光学系を制御するので、ノイズの影響を考慮した精度の高いオートフォーカス制御が行える。
【0009】
また、かかる構成の撮像装置において、光学系制御手段は、推定された調整方向に光学系の合焦の状態を制御する中で、信号の強度が、学習されたオフセット値と前記制御の中で検出された信号の強度の最大値とを基に算出される閾値よりも小さくなったときに、該検出された信号の強度の最大値を信号の強度のピークとして特定するものとしてもよい。
【0010】
このような構成によれば、オフセット値と信号の強度の最大値とを基に算出される閾値を用いて信号の強度のピークを特定するので、ノイズの影響を考慮して正確にピークを特定することができる。
【0011】
また、かかる構成の撮像装置において、光学系は、該光学系を構成する複数のレンズのうち少なくとも一枚のレンズの位置を移動することにより、焦点距離を調整可能なレンズユニットと、少なくとも一枚のレンズを移動する移動用アクチュエータとを備え、光学系制御手段は、移動用アクチュエータを制御して、レンズユニットが合焦する位置に少なくとも一枚のレンズを移動するものとしてもよい。
【0012】
このような構成によれば、光学系は複数のレンズにより構成され、レンズを移動することにより焦点距離を調整する撮像装置についても、精度の高いオートフォーカス制御が行える。
【0013】
また、かかる構成の撮像装置において、学習手段は、高周波成分抽出手段が、被写界の光を所定以上含まない黒レベルの映像信号を所定のゲインで調整し、該調整された映像信号から検出する黒レベル信号強度を少なくとも用いて、合焦していない際の信号の強度を検出し、該信号の強度をオフセット値として学習するものとしてもよい。
【0014】
このような構成によれば、全く合焦していない状態と見なすことができる黒レベル信号強度を用いて、オフセット値を学習するので、精度の高いオフセット値を得ることができる。
【0015】
また、かかる構成の撮像装置において、更に、撮像条件によって制御された所定のゲインで調整された映像信号の輝度信号の強度を検出する手段を備え、学習手段は、検出された黒レベル信号強度とゲインと検出された輝度信号の強度とを用いて、合焦していない際の信号の強度を検出し、該信号の強度をオフセット値として学習するものとしてもよい。
【0016】
このような構成によれば、黒レベル信号強度に加えて、ノイズに大きな影響を与えるゲインと輝度信号の強度とを用いてオフセット値を学習するため、ノイズの影響を精度良く反映して、精度の高いオートフォーカス制御が行える。
【0017】
また、かかる構成の撮像装置において、高周波成分抽出手段は、黒レベル信号強度を複数回数検出し、学習手段は、複数回数検出された黒レベル信号強度の平均値及び標準偏差を少なくとも用いて、合焦していない際の信号の強度を検出し、該信号の強度をオフセット値として学習するものとしてもよい。
【0018】
このような構成によれば、複数回数検出された黒レベル信号強度を基にオフセット値を学習するので、黒レベルの変動を十分に反映することができ、精度の高いオフセット値を得ることができる。
【0019】
また、かかる構成の撮像装置において、更に、光学系が合焦の状態への制御を開始するために必要な初期化を行う初期化手段を備え、高周波成分抽出手段は、初期化の間に黒レベル信号強度を検出するものとしてもよい。
【0020】
このような構成によれば、初期化の間に黒レベル信号強度を検出するために、黒レベル信号強度を検出するために余分な時間がかからないので、効率的にオートフォーカス制御の準備を行える。
【0021】
また、かかる構成の撮像装置において、光学系は、更に前記光学像の光量を調節する絞り機構を備え、高周波成分抽出手段は、絞り機構を所定以下に閉じた状態で信号の強度を検出することで、黒レベル信号強度を検出するものとしてもよい。
【0022】
このような構成によれば、高周波成分抽出手段は、絞り機構を所定以下に閉じた状態で信号の強度を検出することで、黒レベル信号強度を検出するので、簡単に黒レベル信号強度を検出できる。
【0023】
なお、本発明は、上述した撮像装置としての構成のほか、焦点自動調節方法としても構成することができる。
【発明を実施するための最良の形態】
【0024】
本発明の実施例について次の順序で説明する。
(1)デジタルビデオカメラの概略構成:
(2)初期化処理:
(3)オートフォーカス処理:
【0025】
(1)デジタルビデオカメラの概略構成:
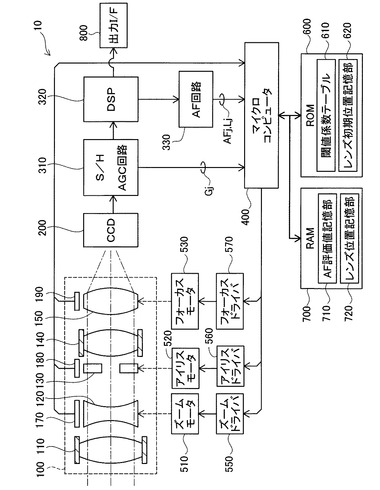
図1は、本発明の実施例としてのデジタルビデオカメラ10の概略構成を示す説明図である。デジタルビデオカメラ10は、山登り方式のオートフォーカス機構を備えた据付式の監視カメラであり、レンズブロック100、CCD200、サンプルホールド(S/H)及びAGC(Automatic Gain Control)回路310、DSP(Digital Signal Processor)320、AF回路330、マイクロコンピュータ400、レンズ等駆動モータ510〜530、レンズ等ドライバ550〜570、ROM600、RAM700、出力インターフェース800を備えている。
【0026】
レンズブロック100は、固定第1レンズ110、変倍機能を持つ可動式のバリエータレンズ120、レンズを通過する光量を制御するアイリス130、固定第2レンズ140、フォーカス機能と変倍時に焦点位置補正を行う機能とを持つ可動式のコンペンセータレンズ150、バリエータレンズ120及びコンペンセータレンズ150の位置をそれぞれ検出する位置検出装置170及び190、アイリス130の絞り値を検出する絞り値検出装置180から構成される。これらのレンズ群は、入射された被写界の光学像の倍率、光量、焦点を調整して、CCD200の面上に結像させる。なお、本実施例においては、上述の各レンズは、説明の便から単一のレンズとして示しているが、複数のレンズから構成されてもよい。
【0027】
CCD200は、結像された光学像を電気信号に変換する撮像素子である。なお、本実施例では、撮像素子としてCCDを用いたが、CMOSなど他の撮像素子を用いてもよい。
【0028】
サンプルホールド及びAGC回路310は、CCD200の出力からスイッチングノイズを除去して信号成分を取り出すとともに、出力信号レベルが一定になるようにゲインを制御する回路である。DSP320は、サンプルホールド及びAGC回路310から出力されたアナログ信号をデジタル信号へ変換して、輝度信号やクロマ信号を生成すると共に、ガンマ補正、アパーチャ補正、ホワイトバランス調整等の処理を行う専用のプロセッサである。AF回路330は、DSPから出力された映像信号から、後述するAF評価値や輝度評価値を検出する回路であり、ハイパスフィルタ、絶対値回路、検波回路等で構成される。
【0029】
ズームモータ510,フォーカスモータ530は、バリエータレンズ120,コンペンセータレンズ150の位置を移動させて、倍率調整または焦点調整を行うためのステッピングモータである。また、アイリスモータ520は、アイリス130を開閉して光量を調整するためのガルバノメータである。
【0030】
マイクロコンピュータ400は、ROM600に記憶された制御プログラムを用いて、AF回路330から得られるAF評価値が最大となるように、フォーカスドライバ570を介してフォーカスモータ530を動作させて、コンペンセータレンズ150の位置を移動させて、オートフォーカス制御を行うほか、デジタルビデオカメラ10の動作全体を制御する。
【0031】
ROM600には、マイクロコンピュータ400が用いる、デジタルビデオカメラ10の動作に必要な制御プログラムのほか、後述する閾値係数テーブル610が記憶されている。また、ROM600には、バリエータレンズ120及びコンペンセータレンズ150の初期位置を記憶するレンズ初期位置記憶部620が確保されている。
【0032】
なお、本実施例のデジタルビデオカメラ10は、デジタルビデオカメラ10の電源を入れて撮像を開始する時に、オートフォーカス制御の開始に先立って、レンズを所定の焦点位置に移動させる。これは、山登り方式のオートフォーカス制御を効率的に行うために、一般的に焦点が合う可能性が高いと予想されるレンズの位置や、ユーザが頻繁に利用する撮像条件に適したレンズの位置を予めメーカーが設定しておき、バリエータレンズ120及びコンペンセータレンズ150を、まず、この設定位置に移動させるのである。オートフォーカス制御は、その後、開始される。このオートフォーカス制御を開始するバリエータレンズ120及びコンペンセータレンズ150の位置が上述の初期位置である。また、レンズ初期位置記憶部620は、ROM600に代えて、不揮発性RAMやEEPROMに確保するものとしてもよい。この場合には、メーカー設定の初期位置だけでなく、ユーザが所望の初期位置も記憶させてもよい。
【0033】
RAM700には、制御プログラムを実行するためのワークエリアのほか、AF評価値記憶部710、レンズ位置記憶部720と呼ばれる記憶領域が確保されている。なお、これらの記憶領域は、マイクロコンピュータ400が備えるレジスタ内に確保することでもよい。
【0034】
出力インターフェース800は、デジタルビデオカメラ10で撮像された映像データを出力するためのインターフェースであり、例えば、図示しないモニタに接続して、モニタ画面上で、デジタルビデオカメラ10で撮像された映像データを見ることができる。
【0035】
(2)初期化処理:
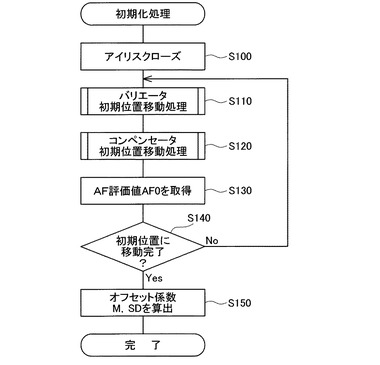
図2は、デジタルビデオカメラ10の電源ON時の初期化処理の手順を示すフローチャートである。この処理は、デジタルビデオカメラ10の電源を入れた時や定期的なリフレッシュ動作を行った時などの初期化動作として、バリエータレンズ120及びコンペンセータレンズ150を予め設定された初期位置に移動させる処理と、後述するオートフォーカス制御において、ノイズの影響を考慮するための情報を取得する処理を平行して行う処理である。
【0036】
ユーザにより、デジタルビデオカメラ10の電源が入れられ、この処理が開始されると、マイクロコンピュータ400は、アイリス130を全閉する(ステップS100)。そして、マイクロコンピュータ400は、バリエータレンズ120の初期位置への移動処理を開始する(ステップS110)。
【0037】
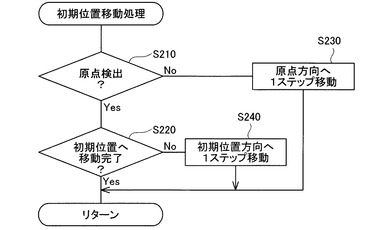
上述の初期位置移動処理については、図3を用いて説明する。図3は、図2の初期化処理のステップS110で実行されるバリエータレンズ120の初期位置移動処理の手順を示すフローチャートである。この処理が開始されると、マイクロコンピュータ400は、バリエータレンズ120の位置検出装置170が原点を検出しているか否かを判断する(ステップS210)。その結果、原点を検出していれば(ステップS210:Yes)、原点から所定のステップ数移動した位置として予め設定された初期位置へ移動完了しているか否かを判断する(ステップS220)。その判断の結果、初期位置へ移動完了していれば(ステップS220:Yes)、この処理を完了し、図2に示した初期化処理に戻る。
【0038】
なお、上述の処理が開始された時のコンペンセータレンズ150の位置は、前回、電源を切った時の位置である。また、上述のステップ数とは、ズームモータ510の1パルス分に対応する移動距離であり、初期位置は、原点からのステップ数をレンズ初期位置記憶部620に記憶することで管理されている。
【0039】
また、本実施例においては、上述の位置検出装置170は、バリエータレンズ120の原点位置にフォトセンサを備えており、このフォトセンサの発光部と受光部の間を、バリエータレンズ120に固定された遮光板がバリエータレンズ120の移動に応じて進退し、受光部の出力が変化した位置を原点として検出するものとしたが、これに限られるものではなく、電気、静電容量、磁気等を用いた別の方法によってもよい。
【0040】
一方、位置検出装置170が原点を検出していなければ(ステップS210:No)、マイクロコンピュータ400は、ズームドライバ550に指令を出して、ズームモータ510を動作させ、バリエータレンズ120を原点方向へ1ステップ移動させ(ステップS230)、図2に示した初期化処理に戻る。
【0041】
また、初期位置へ移動完了していなければ(ステップS220:No)、マイクロコンピュータ400は、ズームドライバ550に指令を出して、ズームモータ510を動作させ、バリエータレンズ120を初期位置方向へ1ステップ移動させ(ステップS240)、図2に示した初期化処理に戻る。
【0042】
次に、マイクロコンピュータ400は、コンペンセータレンズ150の初期位置移動処理を開始する(ステップS120)。この処理は、上述のバリエータレンズ120の初期位置移動処理と同様の処理である。
【0043】
次に、マイクロコンピュータ400は、ステップS110,S120において移動したバリエータレンズ120,コンペンセータレンズ150の位置において、AF評価値AF0を取得する(ステップS130)。このAF評価値は、まず、AF回路330を用いて、ハイパスフィルタにより輝度信号の高周波成分を取り出し、取り出した高周波成分を絶対値回路により絶対値化し、更にゲート回路により測距枠として設定された範囲に該当する信号のみを抽出し、検波回路によりピーク検波することで取得される。なお、本実施例では、このハイパスフィルタは、様々な被写界に対応できるように遮断周波数を1MHzと数十kHzの2種類から選択できるようにしているが、単一の遮断周波数を用いたり、他の遮断周波数を用いたりしてもよい。また、本実施例においては、このAF評価値は、60Hzの垂直同期信号に応答して取得されるものとした。
【0044】
通常、上述のAF評価値は、オートフォーカス制御の過程において、コンペンセータレンズ150を移動させながら所定の移動位置毎に取得され、このAF評価値がピークとなるコンペンセータレンズ150の位置を合焦位置として制御するものであるが、ここでのAF評価値AF0は、アイリス130を全閉した状態で取得されたものであるため、映像信号の黒レベルである。この黒レベルは、被写界に対して全く合焦していない際の映像信号と捉えることができる。
【0045】
なお、上述の黒レベルの取得の際には、固定された条件下で黒レベルを取得するために、AGCゲインを所定値に固定した状態で行うことが望ましい。本実施例においては、黒レベル取得時のAGCゲインは0dBとしたが、他の固定値であってもよい。
【0046】
次に、マイクロコンピュータ400は、バリエータレンズ120及びコンペンセータレンズ150が共に初期位置に移動を完了したか否かを判断する(ステップS140)。その結果、少なくとも一方が初期位置に移動を完了していなければ(ステップS140:No)、処理を上記ステップS110に戻し、バリエータレンズ120,コンペンセータレンズ150の位置を1ステップ移動させ、AF評価値AF0を取得する。
【0047】
上記の処理を繰り返し、バリエータレンズ120及びコンペンセータレンズ150の移動位置毎にAF評価値AF0を取得しながら、バリエータレンズ120及びコンペンセータレンズ150が共に初期位置に移動を完了すると(ステップS140:Yes)、マイクロコンピュータ400は、これまでに取得されたAF評価値AF0を基に、オフセット係数M,SDを算出する(ステップS150)。このオフセット係数M,SDは、後述するオートフォーカス処理において、ノイズの影響を考慮した合焦位置を特定するために、AF評価値のノイズレベルであるオフセット値OFFを算出するための係数であり、ステップS130において取得されたN個のAF評価値AF0(i)(iは1〜Nの整数)の平均値、標準偏差として与えられる。すなわち、オフセット係数M,SDは次式(1),(2)で表される。
【0048】
【数1】

【数2】
【0049】
以上により、一連の初期化処理は完了し、デジタルビデオカメラ10は、オートフォーカス制御による撮像が行える状態となる。かかるデジタルビデオカメラ10は、アイリス130を全閉した状態で合焦していない場合の映像信号としての黒レベルを取得するため、レンズブロック100の状態に関係なく、黒レベルを精度良く検出できる。また、黒レベルを複数個取得することで、黒レベルの変動を十分に反映することができ、後述するオートフォーカス処理の精度を向上させることができる。
【0050】
なお、本実施例においては、バリエータレンズ120及びコンペンセータレンズ150が初期位置に移動するまでのステップ位置全てにおいて、AF評価値AF0を取得するものとした。上述の初期化処理は、通常、デジタルビデオカメラ10の電源ON時のバリエータレンズ120及びコンペンセータレンズ150の位置に応じて、概ね1〜5秒程度を要するため、この間に、概ね60〜300程度のAF評価値AF0が得られることとなる。しかし、AF評価値AF0の取得は、このような態様に限られるものではない。例えば、所定数(例えば30)のAF評価値AF0を取得した段階で、ステップS130において新たなAF評価値AF0の取得を打ち切るものとしたり、バリエータレンズ120及びコンペンセータレンズ150が所定のステップ数移動する毎にAF評価値AF0を取得したりしてもよい。こうすれば、上記ステップS150の係数算出処理を高速化することができる。
【0051】
また、本実施例においては、アイリス130を全閉した状態での映像信号から黒レベルを取得したが、これに限られるものではなく、CCD200のオプチカルブラックから得られる信号から黒レベルを取得するなど、別の方法を用いてもよい。
【0052】
(3)オートフォーカス処理:
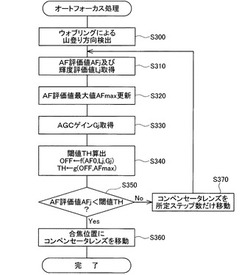
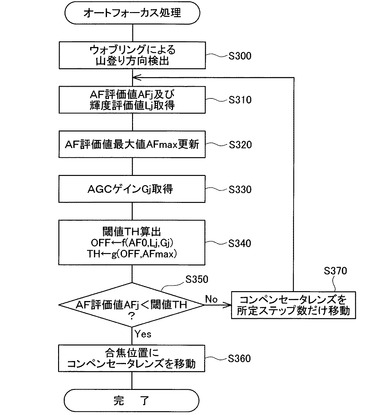
図4は、デジタルビデオカメラ10のオートフォーカス処理の手順を示すフローチャートである。この処理が開始されると、マイクロコンピュータ400は、ウォブリングによる山登り方向の検出を行う(ステップS300)。このウォブリングとは、コンペンセータレンズ150を前後に動かしてAF評価値を取得し、そのAF評価値の大小関係から、コンペンセータレンズ150を前後どちらの方向に移動させると、AF評価値のピークに近づけるのかを判断して、AF評価値のピークが得られる方向を山登り方向として検出する動作である。
【0053】
山登り方向の検出を行うと、マイクロコンピュータ400は、現在のコンペンセータレンズ150の位置において、AF回路330を用いて、AF評価値AFj及び輝度評価値Ljを取得する(ステップS310)。なお、輝度評価値Ljは、AF回路330を用いて、輝度信号を1フィールドに渡り積分することで取得される。また、AF評価値AFj及び輝度評価値Ljは、60Hzの垂直同期信号に応答して取得されるものとした。
【0054】
AF評価値AFjを取得すると、マイクロコンピュータ400は、これまでに取得したAF評価値の最大値AFmaxと、その最大値を検出したコンペンセータレンズ150の位置をRAM700に確保したAF評価値記憶部710及びレンズ位置記憶部720に記憶させる(ステップS320)。なお、初めてAF評価値AFjを取得した場合は、当然、その値とその値に対応したコンペンセータレンズ150の位置とを記憶させることとなる。
【0055】
AF評価値最大値AFmax等を記憶させると、マイクロコンピュータ400は、サンプルホールド及びAGC回路310からAGCゲインGjを取得する(ステップS330)。
【0056】
AGCゲインGjを取得すると、マイクロコンピュータ400は、上記ステップS310で取得した輝度評価値Ljと、上記ステップS330で取得したAGCゲインGjを用いて、AF評価値AFjのノイズレベルであるオフセット値OFFを算出し、このオフセット値OFFを用いて、AF評価値のピークを検出するための閾値THを算出する(ステップS340)。
【0057】
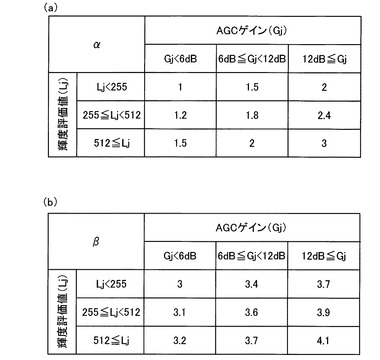
この閾値THの算出方法については、以下に詳述する。まず、閾値係数テーブル610を参照して、AF評価値AFjのノイズレベルであるオフセット値OFFを算出するための係数α,βが抽出される。オフセット値OFFは、黒レベル(AF評価値AF0)の他に、AGCゲインGjと輝度評価値Ljの影響を受けて変動するため、これらをパラメータとして、係数α,βを抽出するのである。図5は、閾値係数テーブル610の一例を示す説明図である。この閾値係数テーブル610は、上記ステップS310で取得した輝度評価値Lj及び上記ステップS330で取得したAGCゲインGjと上述の係数α,βとを関係付けるテーブルであり、取得されたAGCゲインGjと輝度評価値Ljの範囲によって、係数α,βが一意に定まるものである。この例では、例えば、AGCゲインGjが6dB≦Gj<12dB、輝度評価値Ljが255≦Lj<512の範囲にあれば、α=1.8、β=3.6として与えられる。このようなAGCゲインGj及び輝度評価値Ljと係数α,βとの関係は、実験データやカメラの特性から設定されるものであり、図示した例に限らず、別の値を用いたり、AGCゲインGjや評価輝度値Ljの範囲の分類を変えたり、もとより、AGCゲインGjや輝度評価値Ljをパラメータとした関数により求めてもよい。
【0058】
係数α,βが抽出されると、上記ステップS150で算出されたオフセット係数M,SDを用いて、次式(3)によりオフセット値OFFが算出される。
OFF=α・M+β・SD・・・(3)
【0059】
そして、オフセット値OFFが算出されると、上記ステップ320においてAF評価値記憶部710に記憶されたAF評価値最大値AFmaxと係数γを用いて、次式(4)により閾値THが算出される。なお、係数γは、AF評価値最大値AFmaxに対してノイズによるAF評価値の誤差の影響を受けることなく、AF評価値のピーク位置、すなわち合焦位置を判別できる値として設定される値であり、例えば、0.8といった値である。
TH=(AFmax−OFF)・γ+OFF・・・(4)
【0060】
ここで説明を図4に戻す。閾値THを算出すると、マイクロコンピュータ400は、上記ステップS310で取得された現在のコンペンセータレンズ150の位置におけるAF評価値AFjが閾値THより小さいか否かを判断する(ステップS350)。その結果、AF評価値AFjが閾値THよりも小さければ(ステップS350:Yes)、マイクロコンピュータ400は、レンズ位置記憶部720に記憶された、AF評価値最大値AFmaxが取得されたコンペンセータレンズ150の位置を合焦位置と判断し、この位置を読み出して、フォーカスドライバ570を介してフォーカスモータ530に指令を与えて、コンペンセータレンズ150を合焦位置に移動させる。
【0061】
一方、AF評価値AFjが閾値TH以上であれば(ステップS350:No)、コンペンセータレンズ150を所定ステップ数だけ山登り方向に移動させ(ステップS370)、上記ステップS310に処理を戻し、上記ステップS350においてAF評価値AFjが閾値THより小さくなるまでこの一連の処理を繰り返す。
【0062】
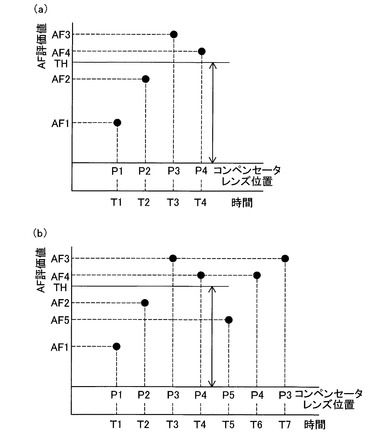
上記ステップS350〜S370の処理については、図6を用いて説明を補完する。図6(a)は、コンペンセータレンズ150の位置P1で上記ステップS310のAF評価値取得処理が開始され、その後、上記ステップS310〜350,370の処理が繰り返され、60Hzの垂直同期信号に対応する時間T1〜T4の経過に合わせて、コンペンセータレンズ150の位置を位置P1〜P4の順に移動させ、その各位置において、AF評価値AF1〜AF4が取得されている状況である。このとき、AF評価値記憶部710には、AF評価値AF1〜AF4のうちの最大値AF3が、レンズ位置記憶部720には、最大値AF3を取得した位置P3が記憶されている。
【0063】
この状況では、上記ステップS350において、最新のAF評価値AF4が閾値TH以上であると判断される。このことは、すなわち、最大値AF3からのAF評価値の低下量が僅かであるということである。AF評価値の低下量が僅かである場合には、その低下の原因が、撮像信号が表す画像の合焦度が低下したことに起因するものであるのか、それともオフセット値OFFの変動によるものであるのかを判断できない。したがって、コンペンセータレンズ150位置を図中の右方向にさらに移動していった場合、現在の最大値AF3以上のAF評価値が取得されるか否かを判断できないため、ステップS370において、コンペンセータレンズ150の位置を図中の右方向にさらに移動させて、その後のAF評価値の変動を確認するのである。
【0064】
また、図6(b)に示すように、コンペンセータレンズ150を次の移動位置P5に移動させてAF評価値AF5を取得し、上記ステップS350において、最新のAF評価値AF5が閾値THより小さいと判断されれば、オフセット値OFFの変動以外の要因でAF評価値が低下している、すなわち、撮像信号が表す画像の合焦度が低下していると判断できる。したがって、現在の最大値AF3以上のAF評価値は今後取得されないと判断できるため、この時点で処理を打ち切り、AF評価値のピークとなる最大値AF3を取得した位置P3を合焦位置と判断して、時間T6,T7の経過に合わせて、コンペンセータレンズ150を位置P5から位置P3に移動させるのである。なお、図中においては、時間T6,T7において取得されるAF評価値AFjは、便宜的に、被写界に変化がないものとして、時間T4,T3において取得されたAF4,AF3と同じ値としたが、被写界に変化があれば、当然、別の値を取得することとなる。
【0065】
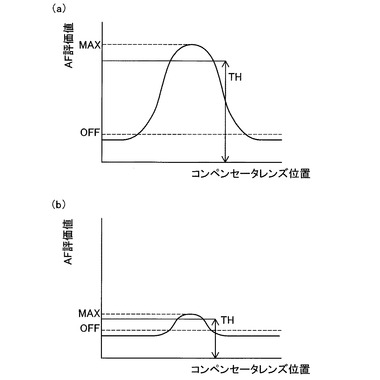
かかる構成のデジタルビデオカメラ10は、AF評価値とオフセット値OFFに基づいた閾値THとの比較により、AF評価値のピークを判断するため、図7(a)に示すような、AF評価値の変動がオフセット値OFFに対して大きく、ノイズの影響を受けにくい場合のみならず、図7(b)に示すような、AF評価値の変動がオフセット値OFFに対して小さく、ノイズの影響を受けやすい場合、例えば、低コントラストや低照度の被写界についても、精度良くAF評価値のピークを検出することが可能であり、精度の高いオートフォーカス制御が行える。
【0066】
また、上述のように閾値THを用いて、AF評価値のピークを判断する方法において、オフセット値OFFの影響を考慮しているので、オフセット値OFFの影響を考慮しない場合と比べて、上式(4)の係数γを大きくすることができるので、AF評価値のピークの検出を高速化することができる。
【0067】
また、全く合焦していない状態と見なすことができる黒レベルと、ノイズに影響するAGCゲイン及び輝度評価値とに基づきオフセット値OFFを算出しているので、精度の高いオフセット値OFFを算出できる。また、このオフセット値OFFは、AF評価値の最小値としてとらえることができ、取得されたAF評価値とオフセット値OFFの大小関係により、オートフォーカスの制御が可能な状態か、不可能な状態かも正確に判断可能である。
【0068】
さらに、かかるデジタルビデオカメラ10は、バリエータレンズ120及びコンペンセータレンズ150を初期位置へ移動させる初期化処理中に黒レベルを取得するため、黒レベルの取得のための余分な時間が不要であり、オートフォーカス処理の準備を効率的に行える。
【0069】
また、本実施例においては、デジタルビデオカメラ10の電源を入れた際に、図3に示した初期位置移動処理を行ったが、これに限られるものではない。長期的に連続使用する監視カメラであれば、定期的に、例えば1日1回リフレッシュ動作を行い、その際にも、この初期位置移動処理を行うなど、別の契機にも行うこととしてもよい。こうすれば、オートフォーカス制御に用いる閾値THを算出するためのAF評価値AF0(黒レベル)を定期的に更新することになるので、精度良くオートフォーカス制御を行うことができる。
【0070】
また、本実施例においては、ステップS310でAF評価値を取得する度に、輝度評価値とAGCゲインを取得して、ステップS340において閾値THを算出し、ステップS350においてAF評価値と閾値THとを比較するものとしたが、合焦位置を特定するまでの手順は、これに限られるものではない。例えば、ステップS320でAF評価値最大値が書き換えられなかった場合のみ、実施例に示した手順で処理を行い、AF評価値最大値が書き換えられた場合には、コンペンセータレンズ150を所定ステップ数だけ移動してステップS310に戻るものとしてもよい。こうすれば、AF評価値のピークが特定できない段階であることが明らかな場合まで、ステップS330〜S350の処理を行う必要がなく、処理を高速化できる。
【0071】
また、本実施例においては、オフセット値OFFを算出するための黒レベルの取得は、バリエータレンズ120及びコンペンセータレンズ150を予め設定された初期位置に移動させる初期化処理中に行うものとしたが、このような態様に限られるものではない。例えば、ユーザによりデジタルビデオカメラ10の電源を切る操作がなされたときに、黒レベルを取得して、その結果を不揮発性メモリに記憶しておき、再び電源が入れられたときに、記憶された黒レベルを用いるなど、撮像に影響を与えない他の場面で取得する態様とすればよい。
【0072】
また、本実施例においては、黒レベルを用いてオフセット値OFFを算出したが、デジタルビデオカメラ10の撮像時の実際のオフセット値OFFは、光量が増加するに従ってノイズが増加することに影響され、上述の数式(3)で算出した値よりも大きくなる。したがって、撮像時の光量に応じて、取得された黒レベルを大きくするような補正を行い、補正後の黒レベルを用いてオフセット値OFFを算出してもよい。あるいは、このような影響を考慮してオフセット係数α,βを設定してもよい。こうすれば、オフセット値OFFを精度よく算出することができる。
【0073】
以上、本発明の実施例について説明したが、本発明はこうした実施例に限られるものではなく、本発明の要旨を脱しない範囲において、種々なる態様で実施できることは勿論である。例えば、実施例においては、コンペンセータレンズ150の位置を移動させることによりオートフォーカス制御を行うデジタルビデオカメラについて例示したが、CCD200を移動させたり、固定第2レンズ140の形状を電圧で変化させたりして、オートフォーカス制御を行うデジタルビデオカメラに対しても適用可能である。もとより、実施例に示した監視用のカメラに限らず、業務用のデジタルビデオカメラ、民生用のハンディデジタルビデオカメラ、携帯電話搭載のデジタルビデオカメラ、ネットワークカメラなど、種々の撮像装置として実現可能である。
【図面の簡単な説明】
【0074】
【図1】本発明の実施例としてのデジタルビデオカメラ10の概略構成を示す説明図である。
【図2】デジタルビデオカメラ10の電源ON時の初期化処理の手順を示すフローチャートである。
【図3】初期化処理で実行されるバリエータレンズ120の初期位置移動処理の手順を示すフローチャートである。
【図4】デジタルビデオカメラ10のオートフォーカス処理の手順を示すフローチャートである。
【図5】閾値係数テーブル610の一例を示す説明図である。
【図6】閾値THを用いてAF評価値のピークを検出する方法の説明図である。
【図7】AF評価値のピークと閾値THとオフセット値OFFとの関係の一例を示す説明図である。
【符号の説明】
【0075】
10…デジタルビデオカメラ
100…レンズブロック
110…固定第1レンズ
120…バリエータレンズ
130…アイリス
140…固定第2レンズ
150…コンペンセータレンズ
170,190…位置検出装置
180…絞り値検出装置
200…CCD
310…サンプルホールド及びAGC回路
320…DSP
330…AF回路
400…マイクロコンピュータ
510…ズームモータ
520…アイリスモータ
530…フォーカスモータ
550…ズームドライバ
560…アイリスドライバ
570…フォーカスドライバ
600…ROM
610…閾値係数テーブル
620…レンズ初期位置記憶部
700…RAM
710…AF評価値記憶部
720…レンズ位置記憶部
800…出力インターフェース
【技術分野】
【0001】
本発明は、合焦位置を調整可能な光学系を介して得られた光学像を撮像手段により映像信号に変換する撮像装置のオートフォーカス技術に関する。
【背景技術】
【0002】
近年、デジタル技術の発展に伴い、デジタルビデオカメラなどの電子カメラが普及している。これらの電子カメラには、通常、被写体に対してフォーカスレンズを自動合焦させるオートフォーカス機構が設けられている。このようなオートフォーカス機構のひとつに、いわゆる山登り方式と呼ばれる方式がある。この山登り方式では、フォーカスレンズの位置を光軸方向に前後に動作させながら、CCDなどの撮像素子から得られる輝度信号の高周波成分を検波回路で検波した評価値(以下、「AF評価値」という)を取得し、このAF評価値がピークとなるフォーカスレンズの位置が合焦位置であるとしてフォーカスレンズの位置が制御される。このように高周波成分を合焦評価に用いるのは、撮像画像のエッジを形成する部分は高周波成分を多く含むので、同じ被写界から得られた撮像画像であれば、AF評価値が大きいほどエッジが強い、すなわち合焦度が高いといえるからである。こうした制御機構を備えた電子カメラとしては、例えば、下記文献のものが知られている。
【0003】
【特許文献1】特開平1−125065号公報
【特許文献2】特開平7−87377号公報
【特許文献3】特開2006−79069号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、こうした山登り方式のAF評価値には、高周波ノイズが含まれてしまうため、正確なオートフォーカス制御が行えないことがあった。そこで、このノイズの影響を考慮したフォーカスレンズ制御を効率的かつ精度良く行える技術が求められていた。
【課題を解決するための手段】
【0005】
上記課題を解決する本発明の撮像装置は、
合焦位置を調整可能な光学系を介して得られた光学像を撮像手段により映像信号に変換する撮像装置であって、
前記映像信号を撮像条件によって制御された所定のゲインで調整し、該調整された映像信号から、少なくとも、前記光学系を介して得られた光学像が合焦した際に得られる高周波成分を含む帯域の信号の強度を検出する高周波成分抽出手段と、
前記光学系を介して得られた光学像が合焦していない際に前記検出された信号の強度をオフセット値として学習する学習手段と、
前記学習されたオフセット値を参照することにより、前記検出された信号の強度がピークとなる前記光学系の調整方向を推定し、該光学系を合焦の状態に制御する光学系制御手段と
を備えたことを要旨とする。
【0006】
かかる構成の撮像装置は、光学像が合焦していない際に検出された信号の強度をオフセット値として学習し、このオフセット値を参照して、検出された信号の強度がピークとなる光学系の調整方向を推定し、該光学系を合焦の状態に制御するので、ノイズの影響を受けやすい低コントラスト、低照度の被写界であっても、精度の高いオートフォーカス制御が行える。
【0007】
また、かかる構成の撮像装置において、光学系制御手段は、光学系を合焦の位置に制御する際、検出された信号の強度のピークを、学習されたオフセット値を参照して特定し、該信号の強度がピークとなるように、光学系の合焦の状態を特定する合焦状態特定手段を有し、該特定された合焦の状態に前記光学系を制御するものとしてもよい。
【0008】
このような構成によれば、信号のピークを、オフセット値を参照して特定し、信号強度がピークとなる合焦の状態に光学系を制御するので、ノイズの影響を考慮した精度の高いオートフォーカス制御が行える。
【0009】
また、かかる構成の撮像装置において、光学系制御手段は、推定された調整方向に光学系の合焦の状態を制御する中で、信号の強度が、学習されたオフセット値と前記制御の中で検出された信号の強度の最大値とを基に算出される閾値よりも小さくなったときに、該検出された信号の強度の最大値を信号の強度のピークとして特定するものとしてもよい。
【0010】
このような構成によれば、オフセット値と信号の強度の最大値とを基に算出される閾値を用いて信号の強度のピークを特定するので、ノイズの影響を考慮して正確にピークを特定することができる。
【0011】
また、かかる構成の撮像装置において、光学系は、該光学系を構成する複数のレンズのうち少なくとも一枚のレンズの位置を移動することにより、焦点距離を調整可能なレンズユニットと、少なくとも一枚のレンズを移動する移動用アクチュエータとを備え、光学系制御手段は、移動用アクチュエータを制御して、レンズユニットが合焦する位置に少なくとも一枚のレンズを移動するものとしてもよい。
【0012】
このような構成によれば、光学系は複数のレンズにより構成され、レンズを移動することにより焦点距離を調整する撮像装置についても、精度の高いオートフォーカス制御が行える。
【0013】
また、かかる構成の撮像装置において、学習手段は、高周波成分抽出手段が、被写界の光を所定以上含まない黒レベルの映像信号を所定のゲインで調整し、該調整された映像信号から検出する黒レベル信号強度を少なくとも用いて、合焦していない際の信号の強度を検出し、該信号の強度をオフセット値として学習するものとしてもよい。
【0014】
このような構成によれば、全く合焦していない状態と見なすことができる黒レベル信号強度を用いて、オフセット値を学習するので、精度の高いオフセット値を得ることができる。
【0015】
また、かかる構成の撮像装置において、更に、撮像条件によって制御された所定のゲインで調整された映像信号の輝度信号の強度を検出する手段を備え、学習手段は、検出された黒レベル信号強度とゲインと検出された輝度信号の強度とを用いて、合焦していない際の信号の強度を検出し、該信号の強度をオフセット値として学習するものとしてもよい。
【0016】
このような構成によれば、黒レベル信号強度に加えて、ノイズに大きな影響を与えるゲインと輝度信号の強度とを用いてオフセット値を学習するため、ノイズの影響を精度良く反映して、精度の高いオートフォーカス制御が行える。
【0017】
また、かかる構成の撮像装置において、高周波成分抽出手段は、黒レベル信号強度を複数回数検出し、学習手段は、複数回数検出された黒レベル信号強度の平均値及び標準偏差を少なくとも用いて、合焦していない際の信号の強度を検出し、該信号の強度をオフセット値として学習するものとしてもよい。
【0018】
このような構成によれば、複数回数検出された黒レベル信号強度を基にオフセット値を学習するので、黒レベルの変動を十分に反映することができ、精度の高いオフセット値を得ることができる。
【0019】
また、かかる構成の撮像装置において、更に、光学系が合焦の状態への制御を開始するために必要な初期化を行う初期化手段を備え、高周波成分抽出手段は、初期化の間に黒レベル信号強度を検出するものとしてもよい。
【0020】
このような構成によれば、初期化の間に黒レベル信号強度を検出するために、黒レベル信号強度を検出するために余分な時間がかからないので、効率的にオートフォーカス制御の準備を行える。
【0021】
また、かかる構成の撮像装置において、光学系は、更に前記光学像の光量を調節する絞り機構を備え、高周波成分抽出手段は、絞り機構を所定以下に閉じた状態で信号の強度を検出することで、黒レベル信号強度を検出するものとしてもよい。
【0022】
このような構成によれば、高周波成分抽出手段は、絞り機構を所定以下に閉じた状態で信号の強度を検出することで、黒レベル信号強度を検出するので、簡単に黒レベル信号強度を検出できる。
【0023】
なお、本発明は、上述した撮像装置としての構成のほか、焦点自動調節方法としても構成することができる。
【発明を実施するための最良の形態】
【0024】
本発明の実施例について次の順序で説明する。
(1)デジタルビデオカメラの概略構成:
(2)初期化処理:
(3)オートフォーカス処理:
【0025】
(1)デジタルビデオカメラの概略構成:
図1は、本発明の実施例としてのデジタルビデオカメラ10の概略構成を示す説明図である。デジタルビデオカメラ10は、山登り方式のオートフォーカス機構を備えた据付式の監視カメラであり、レンズブロック100、CCD200、サンプルホールド(S/H)及びAGC(Automatic Gain Control)回路310、DSP(Digital Signal Processor)320、AF回路330、マイクロコンピュータ400、レンズ等駆動モータ510〜530、レンズ等ドライバ550〜570、ROM600、RAM700、出力インターフェース800を備えている。
【0026】
レンズブロック100は、固定第1レンズ110、変倍機能を持つ可動式のバリエータレンズ120、レンズを通過する光量を制御するアイリス130、固定第2レンズ140、フォーカス機能と変倍時に焦点位置補正を行う機能とを持つ可動式のコンペンセータレンズ150、バリエータレンズ120及びコンペンセータレンズ150の位置をそれぞれ検出する位置検出装置170及び190、アイリス130の絞り値を検出する絞り値検出装置180から構成される。これらのレンズ群は、入射された被写界の光学像の倍率、光量、焦点を調整して、CCD200の面上に結像させる。なお、本実施例においては、上述の各レンズは、説明の便から単一のレンズとして示しているが、複数のレンズから構成されてもよい。
【0027】
CCD200は、結像された光学像を電気信号に変換する撮像素子である。なお、本実施例では、撮像素子としてCCDを用いたが、CMOSなど他の撮像素子を用いてもよい。
【0028】
サンプルホールド及びAGC回路310は、CCD200の出力からスイッチングノイズを除去して信号成分を取り出すとともに、出力信号レベルが一定になるようにゲインを制御する回路である。DSP320は、サンプルホールド及びAGC回路310から出力されたアナログ信号をデジタル信号へ変換して、輝度信号やクロマ信号を生成すると共に、ガンマ補正、アパーチャ補正、ホワイトバランス調整等の処理を行う専用のプロセッサである。AF回路330は、DSPから出力された映像信号から、後述するAF評価値や輝度評価値を検出する回路であり、ハイパスフィルタ、絶対値回路、検波回路等で構成される。
【0029】
ズームモータ510,フォーカスモータ530は、バリエータレンズ120,コンペンセータレンズ150の位置を移動させて、倍率調整または焦点調整を行うためのステッピングモータである。また、アイリスモータ520は、アイリス130を開閉して光量を調整するためのガルバノメータである。
【0030】
マイクロコンピュータ400は、ROM600に記憶された制御プログラムを用いて、AF回路330から得られるAF評価値が最大となるように、フォーカスドライバ570を介してフォーカスモータ530を動作させて、コンペンセータレンズ150の位置を移動させて、オートフォーカス制御を行うほか、デジタルビデオカメラ10の動作全体を制御する。
【0031】
ROM600には、マイクロコンピュータ400が用いる、デジタルビデオカメラ10の動作に必要な制御プログラムのほか、後述する閾値係数テーブル610が記憶されている。また、ROM600には、バリエータレンズ120及びコンペンセータレンズ150の初期位置を記憶するレンズ初期位置記憶部620が確保されている。
【0032】
なお、本実施例のデジタルビデオカメラ10は、デジタルビデオカメラ10の電源を入れて撮像を開始する時に、オートフォーカス制御の開始に先立って、レンズを所定の焦点位置に移動させる。これは、山登り方式のオートフォーカス制御を効率的に行うために、一般的に焦点が合う可能性が高いと予想されるレンズの位置や、ユーザが頻繁に利用する撮像条件に適したレンズの位置を予めメーカーが設定しておき、バリエータレンズ120及びコンペンセータレンズ150を、まず、この設定位置に移動させるのである。オートフォーカス制御は、その後、開始される。このオートフォーカス制御を開始するバリエータレンズ120及びコンペンセータレンズ150の位置が上述の初期位置である。また、レンズ初期位置記憶部620は、ROM600に代えて、不揮発性RAMやEEPROMに確保するものとしてもよい。この場合には、メーカー設定の初期位置だけでなく、ユーザが所望の初期位置も記憶させてもよい。
【0033】
RAM700には、制御プログラムを実行するためのワークエリアのほか、AF評価値記憶部710、レンズ位置記憶部720と呼ばれる記憶領域が確保されている。なお、これらの記憶領域は、マイクロコンピュータ400が備えるレジスタ内に確保することでもよい。
【0034】
出力インターフェース800は、デジタルビデオカメラ10で撮像された映像データを出力するためのインターフェースであり、例えば、図示しないモニタに接続して、モニタ画面上で、デジタルビデオカメラ10で撮像された映像データを見ることができる。
【0035】
(2)初期化処理:
図2は、デジタルビデオカメラ10の電源ON時の初期化処理の手順を示すフローチャートである。この処理は、デジタルビデオカメラ10の電源を入れた時や定期的なリフレッシュ動作を行った時などの初期化動作として、バリエータレンズ120及びコンペンセータレンズ150を予め設定された初期位置に移動させる処理と、後述するオートフォーカス制御において、ノイズの影響を考慮するための情報を取得する処理を平行して行う処理である。
【0036】
ユーザにより、デジタルビデオカメラ10の電源が入れられ、この処理が開始されると、マイクロコンピュータ400は、アイリス130を全閉する(ステップS100)。そして、マイクロコンピュータ400は、バリエータレンズ120の初期位置への移動処理を開始する(ステップS110)。
【0037】
上述の初期位置移動処理については、図3を用いて説明する。図3は、図2の初期化処理のステップS110で実行されるバリエータレンズ120の初期位置移動処理の手順を示すフローチャートである。この処理が開始されると、マイクロコンピュータ400は、バリエータレンズ120の位置検出装置170が原点を検出しているか否かを判断する(ステップS210)。その結果、原点を検出していれば(ステップS210:Yes)、原点から所定のステップ数移動した位置として予め設定された初期位置へ移動完了しているか否かを判断する(ステップS220)。その判断の結果、初期位置へ移動完了していれば(ステップS220:Yes)、この処理を完了し、図2に示した初期化処理に戻る。
【0038】
なお、上述の処理が開始された時のコンペンセータレンズ150の位置は、前回、電源を切った時の位置である。また、上述のステップ数とは、ズームモータ510の1パルス分に対応する移動距離であり、初期位置は、原点からのステップ数をレンズ初期位置記憶部620に記憶することで管理されている。
【0039】
また、本実施例においては、上述の位置検出装置170は、バリエータレンズ120の原点位置にフォトセンサを備えており、このフォトセンサの発光部と受光部の間を、バリエータレンズ120に固定された遮光板がバリエータレンズ120の移動に応じて進退し、受光部の出力が変化した位置を原点として検出するものとしたが、これに限られるものではなく、電気、静電容量、磁気等を用いた別の方法によってもよい。
【0040】
一方、位置検出装置170が原点を検出していなければ(ステップS210:No)、マイクロコンピュータ400は、ズームドライバ550に指令を出して、ズームモータ510を動作させ、バリエータレンズ120を原点方向へ1ステップ移動させ(ステップS230)、図2に示した初期化処理に戻る。
【0041】
また、初期位置へ移動完了していなければ(ステップS220:No)、マイクロコンピュータ400は、ズームドライバ550に指令を出して、ズームモータ510を動作させ、バリエータレンズ120を初期位置方向へ1ステップ移動させ(ステップS240)、図2に示した初期化処理に戻る。
【0042】
次に、マイクロコンピュータ400は、コンペンセータレンズ150の初期位置移動処理を開始する(ステップS120)。この処理は、上述のバリエータレンズ120の初期位置移動処理と同様の処理である。
【0043】
次に、マイクロコンピュータ400は、ステップS110,S120において移動したバリエータレンズ120,コンペンセータレンズ150の位置において、AF評価値AF0を取得する(ステップS130)。このAF評価値は、まず、AF回路330を用いて、ハイパスフィルタにより輝度信号の高周波成分を取り出し、取り出した高周波成分を絶対値回路により絶対値化し、更にゲート回路により測距枠として設定された範囲に該当する信号のみを抽出し、検波回路によりピーク検波することで取得される。なお、本実施例では、このハイパスフィルタは、様々な被写界に対応できるように遮断周波数を1MHzと数十kHzの2種類から選択できるようにしているが、単一の遮断周波数を用いたり、他の遮断周波数を用いたりしてもよい。また、本実施例においては、このAF評価値は、60Hzの垂直同期信号に応答して取得されるものとした。
【0044】
通常、上述のAF評価値は、オートフォーカス制御の過程において、コンペンセータレンズ150を移動させながら所定の移動位置毎に取得され、このAF評価値がピークとなるコンペンセータレンズ150の位置を合焦位置として制御するものであるが、ここでのAF評価値AF0は、アイリス130を全閉した状態で取得されたものであるため、映像信号の黒レベルである。この黒レベルは、被写界に対して全く合焦していない際の映像信号と捉えることができる。
【0045】
なお、上述の黒レベルの取得の際には、固定された条件下で黒レベルを取得するために、AGCゲインを所定値に固定した状態で行うことが望ましい。本実施例においては、黒レベル取得時のAGCゲインは0dBとしたが、他の固定値であってもよい。
【0046】
次に、マイクロコンピュータ400は、バリエータレンズ120及びコンペンセータレンズ150が共に初期位置に移動を完了したか否かを判断する(ステップS140)。その結果、少なくとも一方が初期位置に移動を完了していなければ(ステップS140:No)、処理を上記ステップS110に戻し、バリエータレンズ120,コンペンセータレンズ150の位置を1ステップ移動させ、AF評価値AF0を取得する。
【0047】
上記の処理を繰り返し、バリエータレンズ120及びコンペンセータレンズ150の移動位置毎にAF評価値AF0を取得しながら、バリエータレンズ120及びコンペンセータレンズ150が共に初期位置に移動を完了すると(ステップS140:Yes)、マイクロコンピュータ400は、これまでに取得されたAF評価値AF0を基に、オフセット係数M,SDを算出する(ステップS150)。このオフセット係数M,SDは、後述するオートフォーカス処理において、ノイズの影響を考慮した合焦位置を特定するために、AF評価値のノイズレベルであるオフセット値OFFを算出するための係数であり、ステップS130において取得されたN個のAF評価値AF0(i)(iは1〜Nの整数)の平均値、標準偏差として与えられる。すなわち、オフセット係数M,SDは次式(1),(2)で表される。
【0048】
【数1】
【数2】
【0049】
以上により、一連の初期化処理は完了し、デジタルビデオカメラ10は、オートフォーカス制御による撮像が行える状態となる。かかるデジタルビデオカメラ10は、アイリス130を全閉した状態で合焦していない場合の映像信号としての黒レベルを取得するため、レンズブロック100の状態に関係なく、黒レベルを精度良く検出できる。また、黒レベルを複数個取得することで、黒レベルの変動を十分に反映することができ、後述するオートフォーカス処理の精度を向上させることができる。
【0050】
なお、本実施例においては、バリエータレンズ120及びコンペンセータレンズ150が初期位置に移動するまでのステップ位置全てにおいて、AF評価値AF0を取得するものとした。上述の初期化処理は、通常、デジタルビデオカメラ10の電源ON時のバリエータレンズ120及びコンペンセータレンズ150の位置に応じて、概ね1〜5秒程度を要するため、この間に、概ね60〜300程度のAF評価値AF0が得られることとなる。しかし、AF評価値AF0の取得は、このような態様に限られるものではない。例えば、所定数(例えば30)のAF評価値AF0を取得した段階で、ステップS130において新たなAF評価値AF0の取得を打ち切るものとしたり、バリエータレンズ120及びコンペンセータレンズ150が所定のステップ数移動する毎にAF評価値AF0を取得したりしてもよい。こうすれば、上記ステップS150の係数算出処理を高速化することができる。
【0051】
また、本実施例においては、アイリス130を全閉した状態での映像信号から黒レベルを取得したが、これに限られるものではなく、CCD200のオプチカルブラックから得られる信号から黒レベルを取得するなど、別の方法を用いてもよい。
【0052】
(3)オートフォーカス処理:
図4は、デジタルビデオカメラ10のオートフォーカス処理の手順を示すフローチャートである。この処理が開始されると、マイクロコンピュータ400は、ウォブリングによる山登り方向の検出を行う(ステップS300)。このウォブリングとは、コンペンセータレンズ150を前後に動かしてAF評価値を取得し、そのAF評価値の大小関係から、コンペンセータレンズ150を前後どちらの方向に移動させると、AF評価値のピークに近づけるのかを判断して、AF評価値のピークが得られる方向を山登り方向として検出する動作である。
【0053】
山登り方向の検出を行うと、マイクロコンピュータ400は、現在のコンペンセータレンズ150の位置において、AF回路330を用いて、AF評価値AFj及び輝度評価値Ljを取得する(ステップS310)。なお、輝度評価値Ljは、AF回路330を用いて、輝度信号を1フィールドに渡り積分することで取得される。また、AF評価値AFj及び輝度評価値Ljは、60Hzの垂直同期信号に応答して取得されるものとした。
【0054】
AF評価値AFjを取得すると、マイクロコンピュータ400は、これまでに取得したAF評価値の最大値AFmaxと、その最大値を検出したコンペンセータレンズ150の位置をRAM700に確保したAF評価値記憶部710及びレンズ位置記憶部720に記憶させる(ステップS320)。なお、初めてAF評価値AFjを取得した場合は、当然、その値とその値に対応したコンペンセータレンズ150の位置とを記憶させることとなる。
【0055】
AF評価値最大値AFmax等を記憶させると、マイクロコンピュータ400は、サンプルホールド及びAGC回路310からAGCゲインGjを取得する(ステップS330)。
【0056】
AGCゲインGjを取得すると、マイクロコンピュータ400は、上記ステップS310で取得した輝度評価値Ljと、上記ステップS330で取得したAGCゲインGjを用いて、AF評価値AFjのノイズレベルであるオフセット値OFFを算出し、このオフセット値OFFを用いて、AF評価値のピークを検出するための閾値THを算出する(ステップS340)。
【0057】
この閾値THの算出方法については、以下に詳述する。まず、閾値係数テーブル610を参照して、AF評価値AFjのノイズレベルであるオフセット値OFFを算出するための係数α,βが抽出される。オフセット値OFFは、黒レベル(AF評価値AF0)の他に、AGCゲインGjと輝度評価値Ljの影響を受けて変動するため、これらをパラメータとして、係数α,βを抽出するのである。図5は、閾値係数テーブル610の一例を示す説明図である。この閾値係数テーブル610は、上記ステップS310で取得した輝度評価値Lj及び上記ステップS330で取得したAGCゲインGjと上述の係数α,βとを関係付けるテーブルであり、取得されたAGCゲインGjと輝度評価値Ljの範囲によって、係数α,βが一意に定まるものである。この例では、例えば、AGCゲインGjが6dB≦Gj<12dB、輝度評価値Ljが255≦Lj<512の範囲にあれば、α=1.8、β=3.6として与えられる。このようなAGCゲインGj及び輝度評価値Ljと係数α,βとの関係は、実験データやカメラの特性から設定されるものであり、図示した例に限らず、別の値を用いたり、AGCゲインGjや評価輝度値Ljの範囲の分類を変えたり、もとより、AGCゲインGjや輝度評価値Ljをパラメータとした関数により求めてもよい。
【0058】
係数α,βが抽出されると、上記ステップS150で算出されたオフセット係数M,SDを用いて、次式(3)によりオフセット値OFFが算出される。
OFF=α・M+β・SD・・・(3)
【0059】
そして、オフセット値OFFが算出されると、上記ステップ320においてAF評価値記憶部710に記憶されたAF評価値最大値AFmaxと係数γを用いて、次式(4)により閾値THが算出される。なお、係数γは、AF評価値最大値AFmaxに対してノイズによるAF評価値の誤差の影響を受けることなく、AF評価値のピーク位置、すなわち合焦位置を判別できる値として設定される値であり、例えば、0.8といった値である。
TH=(AFmax−OFF)・γ+OFF・・・(4)
【0060】
ここで説明を図4に戻す。閾値THを算出すると、マイクロコンピュータ400は、上記ステップS310で取得された現在のコンペンセータレンズ150の位置におけるAF評価値AFjが閾値THより小さいか否かを判断する(ステップS350)。その結果、AF評価値AFjが閾値THよりも小さければ(ステップS350:Yes)、マイクロコンピュータ400は、レンズ位置記憶部720に記憶された、AF評価値最大値AFmaxが取得されたコンペンセータレンズ150の位置を合焦位置と判断し、この位置を読み出して、フォーカスドライバ570を介してフォーカスモータ530に指令を与えて、コンペンセータレンズ150を合焦位置に移動させる。
【0061】
一方、AF評価値AFjが閾値TH以上であれば(ステップS350:No)、コンペンセータレンズ150を所定ステップ数だけ山登り方向に移動させ(ステップS370)、上記ステップS310に処理を戻し、上記ステップS350においてAF評価値AFjが閾値THより小さくなるまでこの一連の処理を繰り返す。
【0062】
上記ステップS350〜S370の処理については、図6を用いて説明を補完する。図6(a)は、コンペンセータレンズ150の位置P1で上記ステップS310のAF評価値取得処理が開始され、その後、上記ステップS310〜350,370の処理が繰り返され、60Hzの垂直同期信号に対応する時間T1〜T4の経過に合わせて、コンペンセータレンズ150の位置を位置P1〜P4の順に移動させ、その各位置において、AF評価値AF1〜AF4が取得されている状況である。このとき、AF評価値記憶部710には、AF評価値AF1〜AF4のうちの最大値AF3が、レンズ位置記憶部720には、最大値AF3を取得した位置P3が記憶されている。
【0063】
この状況では、上記ステップS350において、最新のAF評価値AF4が閾値TH以上であると判断される。このことは、すなわち、最大値AF3からのAF評価値の低下量が僅かであるということである。AF評価値の低下量が僅かである場合には、その低下の原因が、撮像信号が表す画像の合焦度が低下したことに起因するものであるのか、それともオフセット値OFFの変動によるものであるのかを判断できない。したがって、コンペンセータレンズ150位置を図中の右方向にさらに移動していった場合、現在の最大値AF3以上のAF評価値が取得されるか否かを判断できないため、ステップS370において、コンペンセータレンズ150の位置を図中の右方向にさらに移動させて、その後のAF評価値の変動を確認するのである。
【0064】
また、図6(b)に示すように、コンペンセータレンズ150を次の移動位置P5に移動させてAF評価値AF5を取得し、上記ステップS350において、最新のAF評価値AF5が閾値THより小さいと判断されれば、オフセット値OFFの変動以外の要因でAF評価値が低下している、すなわち、撮像信号が表す画像の合焦度が低下していると判断できる。したがって、現在の最大値AF3以上のAF評価値は今後取得されないと判断できるため、この時点で処理を打ち切り、AF評価値のピークとなる最大値AF3を取得した位置P3を合焦位置と判断して、時間T6,T7の経過に合わせて、コンペンセータレンズ150を位置P5から位置P3に移動させるのである。なお、図中においては、時間T6,T7において取得されるAF評価値AFjは、便宜的に、被写界に変化がないものとして、時間T4,T3において取得されたAF4,AF3と同じ値としたが、被写界に変化があれば、当然、別の値を取得することとなる。
【0065】
かかる構成のデジタルビデオカメラ10は、AF評価値とオフセット値OFFに基づいた閾値THとの比較により、AF評価値のピークを判断するため、図7(a)に示すような、AF評価値の変動がオフセット値OFFに対して大きく、ノイズの影響を受けにくい場合のみならず、図7(b)に示すような、AF評価値の変動がオフセット値OFFに対して小さく、ノイズの影響を受けやすい場合、例えば、低コントラストや低照度の被写界についても、精度良くAF評価値のピークを検出することが可能であり、精度の高いオートフォーカス制御が行える。
【0066】
また、上述のように閾値THを用いて、AF評価値のピークを判断する方法において、オフセット値OFFの影響を考慮しているので、オフセット値OFFの影響を考慮しない場合と比べて、上式(4)の係数γを大きくすることができるので、AF評価値のピークの検出を高速化することができる。
【0067】
また、全く合焦していない状態と見なすことができる黒レベルと、ノイズに影響するAGCゲイン及び輝度評価値とに基づきオフセット値OFFを算出しているので、精度の高いオフセット値OFFを算出できる。また、このオフセット値OFFは、AF評価値の最小値としてとらえることができ、取得されたAF評価値とオフセット値OFFの大小関係により、オートフォーカスの制御が可能な状態か、不可能な状態かも正確に判断可能である。
【0068】
さらに、かかるデジタルビデオカメラ10は、バリエータレンズ120及びコンペンセータレンズ150を初期位置へ移動させる初期化処理中に黒レベルを取得するため、黒レベルの取得のための余分な時間が不要であり、オートフォーカス処理の準備を効率的に行える。
【0069】
また、本実施例においては、デジタルビデオカメラ10の電源を入れた際に、図3に示した初期位置移動処理を行ったが、これに限られるものではない。長期的に連続使用する監視カメラであれば、定期的に、例えば1日1回リフレッシュ動作を行い、その際にも、この初期位置移動処理を行うなど、別の契機にも行うこととしてもよい。こうすれば、オートフォーカス制御に用いる閾値THを算出するためのAF評価値AF0(黒レベル)を定期的に更新することになるので、精度良くオートフォーカス制御を行うことができる。
【0070】
また、本実施例においては、ステップS310でAF評価値を取得する度に、輝度評価値とAGCゲインを取得して、ステップS340において閾値THを算出し、ステップS350においてAF評価値と閾値THとを比較するものとしたが、合焦位置を特定するまでの手順は、これに限られるものではない。例えば、ステップS320でAF評価値最大値が書き換えられなかった場合のみ、実施例に示した手順で処理を行い、AF評価値最大値が書き換えられた場合には、コンペンセータレンズ150を所定ステップ数だけ移動してステップS310に戻るものとしてもよい。こうすれば、AF評価値のピークが特定できない段階であることが明らかな場合まで、ステップS330〜S350の処理を行う必要がなく、処理を高速化できる。
【0071】
また、本実施例においては、オフセット値OFFを算出するための黒レベルの取得は、バリエータレンズ120及びコンペンセータレンズ150を予め設定された初期位置に移動させる初期化処理中に行うものとしたが、このような態様に限られるものではない。例えば、ユーザによりデジタルビデオカメラ10の電源を切る操作がなされたときに、黒レベルを取得して、その結果を不揮発性メモリに記憶しておき、再び電源が入れられたときに、記憶された黒レベルを用いるなど、撮像に影響を与えない他の場面で取得する態様とすればよい。
【0072】
また、本実施例においては、黒レベルを用いてオフセット値OFFを算出したが、デジタルビデオカメラ10の撮像時の実際のオフセット値OFFは、光量が増加するに従ってノイズが増加することに影響され、上述の数式(3)で算出した値よりも大きくなる。したがって、撮像時の光量に応じて、取得された黒レベルを大きくするような補正を行い、補正後の黒レベルを用いてオフセット値OFFを算出してもよい。あるいは、このような影響を考慮してオフセット係数α,βを設定してもよい。こうすれば、オフセット値OFFを精度よく算出することができる。
【0073】
以上、本発明の実施例について説明したが、本発明はこうした実施例に限られるものではなく、本発明の要旨を脱しない範囲において、種々なる態様で実施できることは勿論である。例えば、実施例においては、コンペンセータレンズ150の位置を移動させることによりオートフォーカス制御を行うデジタルビデオカメラについて例示したが、CCD200を移動させたり、固定第2レンズ140の形状を電圧で変化させたりして、オートフォーカス制御を行うデジタルビデオカメラに対しても適用可能である。もとより、実施例に示した監視用のカメラに限らず、業務用のデジタルビデオカメラ、民生用のハンディデジタルビデオカメラ、携帯電話搭載のデジタルビデオカメラ、ネットワークカメラなど、種々の撮像装置として実現可能である。
【図面の簡単な説明】
【0074】
【図1】本発明の実施例としてのデジタルビデオカメラ10の概略構成を示す説明図である。
【図2】デジタルビデオカメラ10の電源ON時の初期化処理の手順を示すフローチャートである。
【図3】初期化処理で実行されるバリエータレンズ120の初期位置移動処理の手順を示すフローチャートである。
【図4】デジタルビデオカメラ10のオートフォーカス処理の手順を示すフローチャートである。
【図5】閾値係数テーブル610の一例を示す説明図である。
【図6】閾値THを用いてAF評価値のピークを検出する方法の説明図である。
【図7】AF評価値のピークと閾値THとオフセット値OFFとの関係の一例を示す説明図である。
【符号の説明】
【0075】
10…デジタルビデオカメラ
100…レンズブロック
110…固定第1レンズ
120…バリエータレンズ
130…アイリス
140…固定第2レンズ
150…コンペンセータレンズ
170,190…位置検出装置
180…絞り値検出装置
200…CCD
310…サンプルホールド及びAGC回路
320…DSP
330…AF回路
400…マイクロコンピュータ
510…ズームモータ
520…アイリスモータ
530…フォーカスモータ
550…ズームドライバ
560…アイリスドライバ
570…フォーカスドライバ
600…ROM
610…閾値係数テーブル
620…レンズ初期位置記憶部
700…RAM
710…AF評価値記憶部
720…レンズ位置記憶部
800…出力インターフェース
【特許請求の範囲】
【請求項1】
合焦状態を調整可能な光学系を介して得られた光学像を撮像手段により映像信号に変換する撮像装置であって、
前記映像信号を撮像条件によって制御された所定のゲインで調整し、該調整された映像信号から、少なくとも、前記光学系を介して得られた光学像が合焦した際に得られる高周波成分を含む帯域の信号の強度を検出する高周波成分抽出手段と、
前記光学系を介して得られた光学像が合焦していない際に前記検出された信号の強度をオフセット値として学習する学習手段と、
前記学習されたオフセット値を参照することにより、前記検出された信号の強度がピークとなる前記光学系の調整方向を推定し、該光学系を合焦の状態に制御する光学系制御手段と
を備えた撮像装置。
【請求項2】
請求項1記載の撮像装置であって、
前記光学系制御手段は、前記光学系を合焦の状態に制御する際、前記検出された信号の強度のピークを、前記学習されたオフセット値を参照して特定し、該信号の強度がピークとなるように、前記光学系の合焦の状態を特定する合焦状態特定手段を有し、該特定された合焦の状態に前記光学系を制御する撮像装置。
【請求項3】
請求項2記載の撮像装置であって、
前記光学系制御手段は、前記推定された調整方向に前記光学系の合焦の状態を制御する中で、前記信号の強度が、前記学習されたオフセット値と前記制御の中で検出された前記信号の強度の最大値とを基に算出される閾値よりも小さくなったときに、該検出された信号の強度の最大値を前記信号の強度のピークとして特定する撮像装置。
【請求項4】
請求項1ないし請求項3のいずれか記載の撮像装置であって、
前記光学系は、
該光学系を構成する複数のレンズのうち少なくとも一枚のレンズの位置を移動することにより、焦点距離を調整可能なレンズユニットと、
前記少なくとも一枚のレンズを移動する移動用アクチュエータと
を備え、
前記光学系制御手段は、前記移動用アクチュエータを制御して、前記レンズユニットが合焦する位置に前記少なくとも一枚のレンズを移動する
撮像装置。
【請求項5】
請求項1ないし請求項4のいずれか記載の撮像装置であって、
前記学習手段は、前記高周波成分抽出手段が、被写界の光を所定以上含まない黒レベルの前記映像信号を所定のゲインで調整し、該調整された映像信号から検出する黒レベル信号強度を少なくとも用いて、前記合焦していない際の信号の強度を検出し、該信号の強度をオフセット値として学習する撮像装置。
【請求項6】
請求項5記載の撮像装置であって、
更に、前記撮像条件によって制御された所定のゲインで調整された映像信号の輝度信号の強度を検出する手段を備え、
前記学習手段は、前記検出された黒レベル信号強度と前記ゲインと前記検出された輝度信号の強度とを用いて、前記合焦していない際の信号の強度を検出し、該信号の強度をオフセット値として学習する撮像装置。
【請求項7】
請求項5または請求項6記載の撮像装置であって、
前記高周波成分抽出手段は、前記黒レベル信号強度を複数回数検出し、
前記学習手段は、前記複数回数検出された黒レベル信号強度の平均値及び標準偏差を少なくとも用いて、前記合焦していない際の信号の強度を検出し、該信号の強度をオフセット値として学習する撮像装置。
【請求項8】
請求項5ないし請求項7のいずれか記載の撮像装置であって、
更に、前記光学系が前記合焦の状態への制御を開始するために必要な初期化を行う初期化手段を備え、
前記高周波成分抽出手段は、前記初期化の間に前記黒レベル信号強度を検出する
撮像装置。
【請求項9】
請求項5ないし請求項8のいずれか記載の撮像装置であって、
前記光学系は、更に前記光学像の光量を調節する絞り機構を備え、
前記高周波成分抽出手段は、前記絞り機構を所定以下に閉じた状態で前記信号の強度を検出することで、前記黒レベル信号強度を検出する
撮像装置。
【請求項10】
合焦の状態を調整可能な光学系の焦点自動調節方法であって
前記光学系を介して得られた光学像を撮像手段により変換した映像信号から、少なくとも、前記光学系を介して得られた光学像が合焦した際に得られる高周波成分を含む帯域の信号の強度を検出し、
前記光学系を介して得られた光学像が合焦していない際に前記検出された信号の強度をオフセット値として学習し、
前記学習されたオフセット値を参照することにより、前記検出された信号の強度がピークとなる前記光学系の調整方向を推定し、該光学系を合焦の状態に制御する
焦点自動調節方法。
【請求項1】
合焦状態を調整可能な光学系を介して得られた光学像を撮像手段により映像信号に変換する撮像装置であって、
前記映像信号を撮像条件によって制御された所定のゲインで調整し、該調整された映像信号から、少なくとも、前記光学系を介して得られた光学像が合焦した際に得られる高周波成分を含む帯域の信号の強度を検出する高周波成分抽出手段と、
前記光学系を介して得られた光学像が合焦していない際に前記検出された信号の強度をオフセット値として学習する学習手段と、
前記学習されたオフセット値を参照することにより、前記検出された信号の強度がピークとなる前記光学系の調整方向を推定し、該光学系を合焦の状態に制御する光学系制御手段と
を備えた撮像装置。
【請求項2】
請求項1記載の撮像装置であって、
前記光学系制御手段は、前記光学系を合焦の状態に制御する際、前記検出された信号の強度のピークを、前記学習されたオフセット値を参照して特定し、該信号の強度がピークとなるように、前記光学系の合焦の状態を特定する合焦状態特定手段を有し、該特定された合焦の状態に前記光学系を制御する撮像装置。
【請求項3】
請求項2記載の撮像装置であって、
前記光学系制御手段は、前記推定された調整方向に前記光学系の合焦の状態を制御する中で、前記信号の強度が、前記学習されたオフセット値と前記制御の中で検出された前記信号の強度の最大値とを基に算出される閾値よりも小さくなったときに、該検出された信号の強度の最大値を前記信号の強度のピークとして特定する撮像装置。
【請求項4】
請求項1ないし請求項3のいずれか記載の撮像装置であって、
前記光学系は、
該光学系を構成する複数のレンズのうち少なくとも一枚のレンズの位置を移動することにより、焦点距離を調整可能なレンズユニットと、
前記少なくとも一枚のレンズを移動する移動用アクチュエータと
を備え、
前記光学系制御手段は、前記移動用アクチュエータを制御して、前記レンズユニットが合焦する位置に前記少なくとも一枚のレンズを移動する
撮像装置。
【請求項5】
請求項1ないし請求項4のいずれか記載の撮像装置であって、
前記学習手段は、前記高周波成分抽出手段が、被写界の光を所定以上含まない黒レベルの前記映像信号を所定のゲインで調整し、該調整された映像信号から検出する黒レベル信号強度を少なくとも用いて、前記合焦していない際の信号の強度を検出し、該信号の強度をオフセット値として学習する撮像装置。
【請求項6】
請求項5記載の撮像装置であって、
更に、前記撮像条件によって制御された所定のゲインで調整された映像信号の輝度信号の強度を検出する手段を備え、
前記学習手段は、前記検出された黒レベル信号強度と前記ゲインと前記検出された輝度信号の強度とを用いて、前記合焦していない際の信号の強度を検出し、該信号の強度をオフセット値として学習する撮像装置。
【請求項7】
請求項5または請求項6記載の撮像装置であって、
前記高周波成分抽出手段は、前記黒レベル信号強度を複数回数検出し、
前記学習手段は、前記複数回数検出された黒レベル信号強度の平均値及び標準偏差を少なくとも用いて、前記合焦していない際の信号の強度を検出し、該信号の強度をオフセット値として学習する撮像装置。
【請求項8】
請求項5ないし請求項7のいずれか記載の撮像装置であって、
更に、前記光学系が前記合焦の状態への制御を開始するために必要な初期化を行う初期化手段を備え、
前記高周波成分抽出手段は、前記初期化の間に前記黒レベル信号強度を検出する
撮像装置。
【請求項9】
請求項5ないし請求項8のいずれか記載の撮像装置であって、
前記光学系は、更に前記光学像の光量を調節する絞り機構を備え、
前記高周波成分抽出手段は、前記絞り機構を所定以下に閉じた状態で前記信号の強度を検出することで、前記黒レベル信号強度を検出する
撮像装置。
【請求項10】
合焦の状態を調整可能な光学系の焦点自動調節方法であって
前記光学系を介して得られた光学像を撮像手段により変換した映像信号から、少なくとも、前記光学系を介して得られた光学像が合焦した際に得られる高周波成分を含む帯域の信号の強度を検出し、
前記光学系を介して得られた光学像が合焦していない際に前記検出された信号の強度をオフセット値として学習し、
前記学習されたオフセット値を参照することにより、前記検出された信号の強度がピークとなる前記光学系の調整方向を推定し、該光学系を合焦の状態に制御する
焦点自動調節方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2008−170507(P2008−170507A)
【公開日】平成20年7月24日(2008.7.24)
【国際特許分類】
【出願番号】特願2007−1107(P2007−1107)
【出願日】平成19年1月9日(2007.1.9)
【出願人】(000000424)株式会社エルモ社 (104)
【Fターム(参考)】
【公開日】平成20年7月24日(2008.7.24)
【国際特許分類】
【出願日】平成19年1月9日(2007.1.9)
【出願人】(000000424)株式会社エルモ社 (104)
【Fターム(参考)】
[ Back to top ]