
撮像装置、焦点調節方法
【課題】様々な撮像条件に対して好適に合焦位置の検出を行える焦点調節技術の提供。
【解決手段】デジタルビデオカメラ10は、山登り方式のオートフォーカス処理において、コンペンセータレンズ150の位置に応じたAF評価値AFjを取得するたびに、コンペンセータレンズ150の移動速度VjとAGCゲインGjとを取得し、それに基づいて調整係数α,β(0<α<1,0<β<1)を設定する。調整係数αは、移動速度Vjが速くなるほど大きくなるように、また、調整係数βは、AGCゲインGjが小さくなるほど大きくなるように設定される。そして、それまでの山登り動作において取得したAF評価値AFjの最大値であるAFmaxに調整係数α及びβを乗じて算出される閾値THとAF評価値AFjとを比較することによって合焦判定を行う。
【解決手段】デジタルビデオカメラ10は、山登り方式のオートフォーカス処理において、コンペンセータレンズ150の位置に応じたAF評価値AFjを取得するたびに、コンペンセータレンズ150の移動速度VjとAGCゲインGjとを取得し、それに基づいて調整係数α,β(0<α<1,0<β<1)を設定する。調整係数αは、移動速度Vjが速くなるほど大きくなるように、また、調整係数βは、AGCゲインGjが小さくなるほど大きくなるように設定される。そして、それまでの山登り動作において取得したAF評価値AFjの最大値であるAFmaxに調整係数α及びβを乗じて算出される閾値THとAF評価値AFjとを比較することによって合焦判定を行う。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、合焦状態を調整するフォーカスレンズを備えた光学系を有する撮像装置の焦点調節技術に関する。
【背景技術】
【0002】
近年、デジタル技術の発展に伴い、デジタルビデオカメラなどの電子カメラが普及している。これらの電子カメラには、通常、被写体に対してフォーカスレンズを自動合焦させるオートフォーカス機構が設けられている。このようなオートフォーカス機構のひとつに、いわゆる山登り方式と呼ばれる方式がある(例えば、下記特許文献1)。この山登り方式では、フォーカスレンズの位置を光軸方向に前後に動作させながら、CCDなどの撮像素子から得られる輝度信号の高周波成分を検波回路で検波した評価値(以下、「AF評価値」ともいう)を取得し、AF評価値がピークとなるフォーカスレンズの位置が合焦位置であるとしてフォーカスレンズの位置が制御される(以下、「AF動作」ともいう)。このように高周波成分を合焦評価に用いるのは、撮像画像のエッジを形成する部分は高周波成分を多く含むので、同じ被写界から得られた撮像画像であれば、AF評価値が大きいほどエッジが強い、すなわち合焦度が高いといえるからである。
【0003】
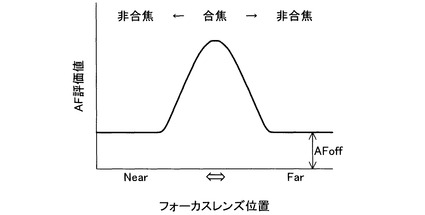
このようなフォーカスレンズの位置とAF評価値との関係を図5に例示する。図5に示すように、合焦位置では、AF評価値が最大となり、合焦位置から離れるに従って、AF評価値は小さくなる。そしてフォーカスレンズの位置が合焦位置から、所定位置だけ離れると、AF評価値はそれ以上小さくならない。撮像された映像の内容が判定不能なほどに大きくボケた状態になると、輝度信号の周波数成分に変化がなくなるので、その結果、AF評価値も変化しなくなるからである。このような変化がなくなった状態のAF評価値をオフセット評価値AFoffともいう。
【0004】
かかるAF動作について、更に図6を用いて説明する。AF動作が開始されると、まず、ウォブリング動作によって、AF評価値が増加するフォーカスレンズの移動方向が決定される。ウォブリング動作とは、フォーカスレンズを微小移動させて、その際に検出されるAF評価値の増減により、AF評価値がピークに向かうフォーカスレンズの移動方向を判定する動作である。図6に示すように、フォーカスレンズが位置P1にある場合にウォブリング動作が行われ、フォーカスレンズの移動方向が位置P1からピーク側(位置P3側)に向かう方向に決定されると、当該方向に所定距離ずつフォーカスレンズを移動してAF評価値が検出される。移動した位置におけるAF評価値が、以前のAF評価値よりも大きい場合には、AF評価値の最大値である最大値AFmaxが更新される。
【0005】
そして、一旦、ピーク位置(位置P3)を超えて、閾値THまでAF評価値が低下すると(フォーカスレンズが位置P2まで移動すると)、それまでの動作における最大値AFmaxが得られたときのフォーカスレンズの位置、すなわち、位置P3が合焦位置と判定され、フォーカスレンズが位置P3まで移動される。このように、最大値AFmaxよりもAF評価値が閾値THだけ低下して初めて、ピーク位置を判定するのは、映像信号には、時間によって変化するランダムノイズが含まれ、AF評価値はフォーカスレンズが停止している状態であっても一定の変動が生じるので、このような変動誤差を踏まえて、精度良くピーク位置を判定するためである。なお、通常、閾値THは、最大値AFmaxを固定の所定割合だけ減じた値などとして設定される。
【0006】
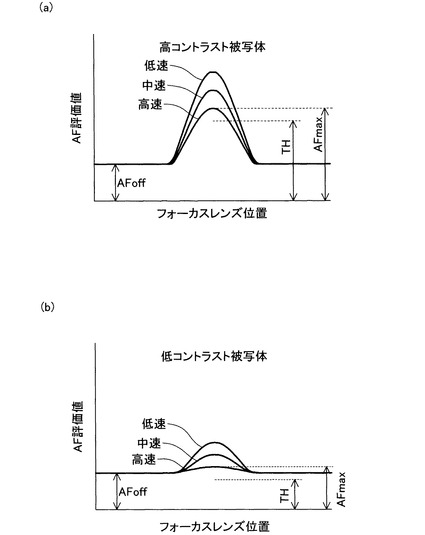
しかしながら、上述したオートフォーカス装置には、撮像状況によっては、以下の問題が生じていた。具体的には、上述したオートフォーカス装置においては、高コントラストの被写体を撮像した場合には、撮像素子から得られる輝度信号には高周波成分が多く含まれるために、AF評価値は相対的に大きくなる。一方、低コントラストの被写体を撮像した場合には、撮像素子から得られる輝度信号には高周波成分が少ないので、AF評価値は相対的に小さくなる。また、フォーカスレンズを高速で移動させると、光学系の積分効果が大きくなるために、高周波成分が大きく低下し、AF評価値が相対的に小さくなる。一方、フォーカスレンズを低速で移動させると、光学系の積分効果が小さくなるために、高周波成分がそれほど低下せず、AF評価値が相対的に大きくなる。
【0007】
このような現象の具体例を図7に示す。図7(a)は、高コントラスト被写体に対して、フォーカスレンズの移動速度を変化させた場合のAF評価値の変化を示している。図7(b)は、低コントラスト被写体に対して、フォーカスレンズの移動速度を変化させた場合のAF評価値の変化を示している。高コントラスト被写体と低コントラスト被写体とを比べると、上述した積分効果の影響によって、高コントラスト被写体の方が、低コントラスト被写体と比べて、ピーク時のAF評価値が小さくなっている。また、高コントラスト被写体、低コントラスト被写体のいずれの場合においても、フォーカスレンズの移動速度が低速、中速、高速となるに従って、ピーク時のAF評価値が小さくなっている。
【0008】
ここで、図7(a)に示すように、高コントラスト被写体に対しては、AF評価値が比較的大きくなるために、フォーカスレンズの移動速度が高速であっても、最大値AFmaxに所定割合R(O<R<1)を乗じて算出された閾値THは、オフセット評価値AFoffよりも大きくなる。その結果、ピーク位置の検出が可能である。一方、図7(b)に示すように、低コントラスト被写体に対しては、AF評価値が比較的小さくなるために、フォーカスレンズの移動速度が高速になると、最大値AFmaxに所定割合Rを乗じて算出された閾値THは、オフセット評価値AFoffよりも小さくなることがある。その結果、ピーク位置の検出ができなくなるのである。
【0009】
このような問題に対して、閾値THを大きく設定することも考えられるが、閾値THを大きくすると、特にフォーカスレンズの低速移動時に、上述したノイズの影響を十分に解消できずに、合焦位置の誤検出を行う可能性が高くなるという弊害を招くことなる。なお、逆に、閾値THを小さくすると、合焦位置の誤検出を行う可能性は低下するが、AF動作におけるフォーカスレンズの移動量が増加するために、撮像結果がより振動的になってしまい、ユーザにとっては不快な動作となるので、一般的には、閾値THは、合焦位置の検出精度と撮像結果の振動の程度との兼ね合いで設定される。また、低コントラスト被写体に対して、常にフォーカスレンズの移動速度を低速化することも考えられるが、常に移動速度を低速化すると、AF動作時間が長くなるという弊害を招くこととなる。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】特開2008−170507号公報
【発明の概要】
【発明が解決しようとする課題】
【0011】
上述の問題を踏まえ、本発明が解決しようとする課題は、様々な撮像条件に対して好適に合焦位置の検出を行える焦点調節技術を提供することである。
【課題を解決するための手段】
【0012】
本発明は、上述の課題の少なくとも一部を解決するためになされたものであり、以下の形態又は適用例として実現することが可能である。
【0013】
[適用例1]合焦状態を調整するフォーカスレンズを備えた光学系を有する撮像装置であって、
前記光学系により得られた光学像を映像信号に変換する撮像手段と、
前記映像信号を所定のゲインで調整し、該調整された映像信号から、少なくとも、前記光学系を介して得られた光学像に含まれる高周波成分を含む帯域の信号の強度を合焦評価値として抽出する合焦評価値抽出手段と、
前記光学系の前記フォーカスレンズを前記合焦評価値が増大する方向への移動を開始し、前記移動に伴って前記検出される合焦評価値の最大値を保持する最大値保持手段と、
前記合焦評価値を検出する際の前記フォーカスレンズの移動速度に基づく割合だけ、前記最大値を小さくした値として、判定閾値を設定する判定閾値設定手段と、
前記設定された判定閾値と前記合焦評価値とを比較し、前記合焦評価値が前記判定閾値を下回ったとき、前記合焦評価値が最大値となった時の前記フォーカスレンズの位置を、合焦位置と判定する合焦位置判定手段と、
該合焦位置に前記フォーカスレンズを制御する合焦制御手段と
を備えた撮像装置。
【0014】
かかる撮像装置によれば、判定閾値を、光学系のフォーカスレンズの移動速度に基づく割合だけ、前記最大値を小さくした値として設定することができる。従って、フォーカスレンズの移動速度が速いために、合焦評価値の最大値が小さくなってしまう場合でも、合焦の位置の判定に対して望ましい判定閾値を設定することが出来る。しかも、フォーカスレンズの移動速度が低い場合には、判定閾値を異なる割合だけ小さくできるので、フォーカスレンズの移動速度が低い場合と高い場合で、それぞれ望ましい判定閾値の設定を行なうことができる。
【0015】
[適用例2]適用例1記載の撮像装置であって、前記判定閾値設定手段は、前記判定閾値を、判定閾値=α×最大値として決定し、前記係数αを、前記フォーカスレンズの移動速度が高いほど大きな値(但し、αは値1未満)として設定する撮像装置。
【0016】
かかる撮像装置では、判定閾値の設定に、係数を用いており、最大値との関係を明確に把握することができる。しかも、この係数αを、フォーカスレンズの移動速度が高いほど大きな値(但し、αは値1未満)として設定するので、フォーカスレンズの移動速度か速いために、合焦評価値の最大値が小さくなってしまう場合には、判定閾値を高くでき、合焦の位置の判定を確実に行なうことができる。しかも、フォーカスレンズの移動速度が低い場合には、判定閾値を低く設定するので、ノイズなどによる誤判定を抑制することができる。
【0017】
[適用例3]適用例1記載の撮像装置であって、前記合焦評価値が、前記フォーカスレンズの所定範囲での移動によっても変化しない位置で検出された前記合焦評価値をオフセット値として学習する学習手段を備えると共に、前記判定閾値設定手段は、前記判定閾値を、判定閾値=α×(最大値−オフセット値)+オフセット値として決定し、前記係数αを、前記フォーカスレンズの移動速度が高いほど大きな値(但し、αは値1未満)として設定する撮像装置。
【0018】
かかる撮像装置では、適用例2と同様の効果を奏するうえ、判定閾値の設定に際して、オフセット値を考慮しているので、オフセット値が大きい場合などでも、判定閾値を確実に設定することができる。
【0019】
[適用例4]適用例1ないし適用例3のいずれか記載の撮像装置であって、前記判定閾値設定手段は、前記係数αの値を、前記ゲインの大きさによって修正する撮像装置。
かかる撮像装置では、ゲインの大きさによって、合焦判定値は影響を受けるので、ゲインの大きさによって係数αの値を修正することにより、こうした影響を抑制することができる。例えば、ゲインが大きい場合にはノイズも大きくなりやすいので、係数αを、ゲインが大きいほど小さく修正することにより、ノイズの影響を抑制することができる。
【0020】
[適用例5]適用例1ないし適用例4のいずれか記載の撮像装置であって、前記光学系は、該光学系を構成する複数のレンズに含まれる前記フォーカスレンズの位置を移動することにより、焦点距離を調整可能なレンズユニットと、前記フォーカスレンズを移動する移動用アクチュエータとを備える撮像装置。
【0021】
かかる撮像装置では、移動用アクチュエータを用いて、フォーカスレンズを容易に移動することができる。またこのアクチュエータに対する制御量を測るか、あるいはこのアクチュエータにセンサを設けて検出すれば、フォーカスレンズの移動速度を容易に検出することができる。
【0022】
[適用例6]合焦状態を調整するフォーカスレンズを備えた光学系を用いて撮像装置の焦点を調節する方法であって、前記光学系により得られた光学像を映像信号に変換し、前記映像信号を所定のゲインで調整し、該調整された映像信号から、少なくとも、前記光学系を介して得られた光学像に含まれる高周波成分を含む帯域の信号の強度を合焦評価値として抽出し、前記光学系の前記フォーカスレンズを前記合焦評価位置が増大する方向への移動を開始し、前記移動に伴って前記検出される合焦評価値の最大値を保持し、前記合焦評価値を検出する際の前記フォーカスレンズの移動速度に基づく割合だけ、前記最大値を小さくした値として、判定閾値を設定し、前記設定された判定閾値と前記合焦評価値とを比較し、前記合焦評価値が前記判定閾値を下回ったとき、前記合焦評価値が最大値となった時の前記フォーカスレンズの位置を、合焦位置と判定し、該合焦の位置に向けて、前記フォーカスレンズの移動を開始することで、前記焦点調整の動作を繰り返す焦点調節方法。
【0023】
かかる焦点調節方法によれば、判定閾値を、光学系のフォーカスレンズの移動速度に基づく割合だけ、前記最大値を小さくした値として設定することができる。従って、フォーカスレンズの移動速度が速いために、合焦評価値の最大値が小さくなってしまう場合でも、合焦の位置の判定に対して望ましい判定閾値を設定することが出来る。しかも、フォーカスレンズの移動速度が低い場合には、判定閾値を異なる割合だけ小さくできるので、フォーカスレンズの移動速度が低い場合と高い場合で、それぞれ望ましい判定閾値の設定を行なうことができる。
【0024】
なお、本発明は、上述した撮像装置や焦点調節方法としてのほか、焦点調節プログラム、当該プログラムを記録した記憶媒体等としても実現することができる。
【図面の簡単な説明】
【0025】
【図1】本発明の実施例としてのデジタルビデオカメラ10の概略構成を示す説明図である。
【図2】デジタルビデオカメラ10のオートフォーカス処理の手順を示すフローチャートである。
【図3】オートフォーカス処理に用いる閾値THを設定するための閾値係数算出関数455の特性を示す説明図である。
【図4】コンペンセータレンズ150の移動速度によるAF評価値へのノイズの影響の違いを示す説明図である。
【図5】フォーカスレンズの位置に応じた合焦状態とAF評価値との関係を示す説明図である。
【図6】山登り方式によるオートフォーカスの仕組みを示す説明図である。
【図7】被写体のコントラストとフォーカスレンズの移動速度がAF評価値に及ぼす影響を示す説明図である。
【発明を実施するための形態】
【0026】
本発明の実施例について説明する。
A.実施例:
A−1.デジタルビデオカメラ10の概略構成:
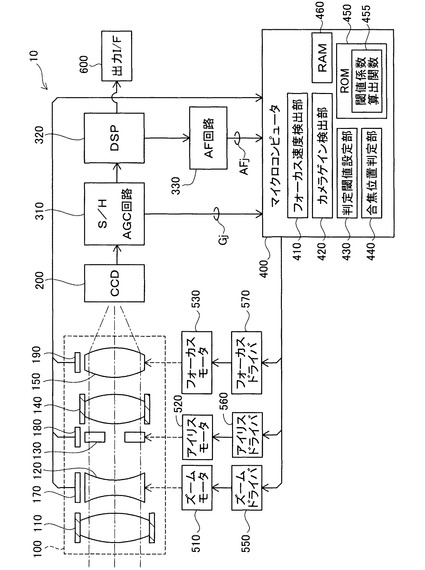
図1は、本発明の実施例としてのデジタルビデオカメラ10の概略構成を示す説明図である。デジタルビデオカメラ10は、山登り方式のオートフォーカス機構を備えた遠隔会議用カメラであり、レンズブロック100、CCD200、サンプルホールド(S/H)及びAGC(Automatic Gain Control)回路310、DSP(Digital Signal Processor)320、AF回路330、マイクロコンピュータ400、レンズ等駆動モータ510〜530、レンズ等ドライバ550〜570、出力インターフェース600を備えている。
【0027】
レンズブロック100は、固定第1レンズ110、変倍機能を持つ可動式のバリエータレンズ120、レンズを通過する光量を制御するアイリス130、固定第2レンズ140、フォーカス機能と変倍時に焦点位置補正を行う機能とを持つ可動式のコンペンセータレンズ150、バリエータレンズ120及びコンペンセータレンズ150の位置をそれぞれ検出する位置検出装置170及び190、アイリス130の絞り値を検出する絞り値検出装置180から構成される。これらのレンズ群は、入射された被写界の光学像の倍率、光量、焦点を調整して、CCD200の面上に結像させる。なお、本実施例においては、上述の各レンズは、説明の便から単一のレンズとして示しているが、複数のレンズから構成されてもよい。コンペンセータレンズ150は、請求項のフォーカスレンズに該当する。
【0028】
CCD200は、結像された光学像を電気信号に変換する撮像素子である。なお、本実施例では、撮像素子としてCCDを用いたが、CMOSなど他の撮像素子を用いてもよい。
【0029】
サンプルホールド及びAGC回路310は、CCD200の出力からスイッチングノイズを除去して信号成分を取り出すとともに、出力信号レベルが一定になるようにゲインを制御する回路である。DSP320は、サンプルホールド及びAGC回路310から出力されたアナログ信号をデジタル信号へ変換して、輝度信号やクロマ信号を生成すると共に、ガンマ補正、アパーチャ補正、ホワイトバランス調整等の処理を行う専用のプロセッサである。AF回路330は、DSPから出力された映像信号から、後述するAF評価値を検出する回路であり、ハイパスフィルタ、絶対値回路、検波回路等で構成される。AF評価値は、請求項の合焦評価値に該当し、AF回路330は、請求項の合焦評価値抽出手段に該当する。
【0030】
ズームモータ510,フォーカスモータ530は、ズームドライバ560、フォーカスドライバ570の制御を受けて、バリエータレンズ120,コンペンセータレンズ150の位置を移動させて、倍率調整または焦点調整を行うためのステッピングモータである。また、アイリスモータ520は、アイリスドライバ560の制御を受けて、アイリス130を開閉して光量を調整するためのガルバノメータである。
【0031】
マイクロコンピュータ400は、ROM450に記憶された制御プログラムをRAM460に展開して実行することで、デジタルビデオカメラ10の動作全体を制御するほか、フォーカス速度検出部410、カメラゲイン検出部420、判定閾値設定部430、合焦位置判定部440としても機能する。これらの機能の詳細については後述する。ROM450には、マイクロコンピュータ400が用いる、デジタルビデオカメラ10の動作に必要な制御プログラムのほか、後述する閾値係数算出関数455が記憶されている。
【0032】
出力インターフェース600は、デジタルビデオカメラ10で撮像された映像データを、ネットワークを介してモニタに出力するためのインターフェースであり、例えば、図示しないネットワークを介して、当該ネットワークに接続されたモニタの画面上で、デジタルビデオカメラ10で撮像された映像データを見ることができる。
【0033】
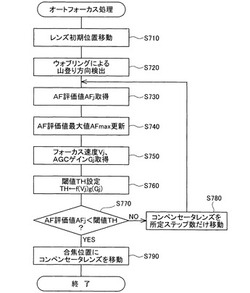
A−2.オートフォーカス処理:
図2は、デジタルビデオカメラ10のオートフォーカス処理の手順を示すフローチャートである。この処理が開始されると、マイクロコンピュータ400は、バリエータレンズ120及びコンペンセータレンズ150を初期位置に移動させる(ステップS710)。ここでの初期位置は、一般的に焦点が合う可能性が高いと予想されるレンズの位置であり、ROM450に記憶されたメーカー設定の初期位置である。ただし、ユーザの利用履歴等に基づいて、ユーザが頻繁に利用する撮像条件に適したレンズの位置を書き換え可能な不揮発性メモリに記憶しておき、当該位置に移動させる構成としてもよい。また、ステップS710は、オートフォーカス処理として行うことに限らず、デジタルビデオカメラ10の電源を入れて撮像を開始する時に、オートフォーカス処理の開始に先立って実行してもよい。こうすれば、オートフォーカス処理を高速化することができる。
【0034】
バリエータレンズ120及びコンペンセータレンズ150を移動させると、マイクロコンピュータ400は、ウォブリングによる山登り方向の検出を行う(ステップS720)。ウォブリングとは、コンペンセータレンズ150を前後に動かしてAF評価値を取得し、そのAF評価値の大小関係から、コンペンセータレンズ150を前後どちらの方向に移動させると、AF評価値のピークに近づけるのかを判断して、AF評価値のピークが得られる方向を山登り方向として検出する動作である。
【0035】
山登り方向の検出を行うと、マイクロコンピュータ400は、現在のコンペンセータレンズ150の位置において、AF回路330を用いて、AF評価値AFjを取得する(ステップS730)。このAF評価値は、AF回路330を用いて、ハイパスフィルタにより輝度信号の高周波成分を取り出し、取り出した高周波成分を絶対値回路により絶対値化し、更にゲート回路により測距枠として設定された範囲に該当する信号のみを抽出し、検波回路によりピーク検波することで取得される。なお、本実施例では、このハイパスフィルタは、様々な被写界に対応できるように遮断周波数を1MHzと数十kHzの2種類から選択できるようにしているが、単一の遮断周波数を用いたり、他の遮断周波数を用いたりしてもよい。また、本実施例においては、このAF評価値は、60Hzの垂直同期信号に応答して取得されるものとした。
【0036】
AF評価値AFjを取得すると、マイクロコンピュータ400は、これまでに取得したAF評価値AFjの最大値AFmaxと、最大値AFmaxを検出したコンペンセータレンズ150の位置をRAM460に記憶させる(ステップS740)。なお、初めてAF評価値AFjを取得した場合は、当然、その値とその値に対応したコンペンセータレンズ150の位置とを記憶させることとなる。
【0037】
最大値AFmax等を記憶させると、マイクロコンピュータ400は、フォーカス速度検出部410の処理として、AF評価値AFjの取得時のコンペンセータレンズ150の移動速度Vjを取得すると共に、カメラゲイン検出部420の処理として、サンプルホールド及びAGC回路310からAF評価値AFjの取得時のAGCゲインGjを取得する(ステップS750)。なお、本実施例においては、移動速度Vjは、マイクロコンピュータ400がフォーカスモータ530に対する制御量を測る構成とした。ただし、フォーカスモータ530にセンサを設けるなどして、移動速度Vjを取得してもよい。
【0038】
本実施例においては、移動速度Vjは、上記ステップS730で取得したAF評価値AFjに基づいて制御される。具体的には、AF評価値AFjがオフセット評価値AFoffに近い場合、例えば、AF評価値AFjとオフセット評価値AFoffとの差分が所定値以下の場合には、マイクロコンピュータ400は、コンペンセータレンズ150の現在の位置が合焦位置から比較的遠いと判断して、移動速度Vjが相対的に速くなるように制御する。
【0039】
一方、AF評価値AFjがオフセット評価値AFoffに遠い場合、例えば、AF評価値AFjとオフセット評価値AFoffとの差分が所定値より大きい場合には、マイクロコンピュータ400は、コンペンセータレンズ150の現在の位置が合焦位置から比較的近いと判断して、移動速度Vjが相対的に遅くなるように制御する。なお、オフセット評価値AFoffは、例えば、デジタルビデオカメラ10の電源投入時やオートフォーカス処理前に、マイクロコンピュータ400が、アイリス130を全閉した状態でAF評価値をオフセット評価値AFoffとして取得してもよいし、コンペンセータレンズ150を広い範囲で移動させて、変動が所定値以下となったAF評価値をオフセット評価値AFoffとして取得してもよい。また、本実施例においては、AGCゲインGjは、DSP320で自動調整された露出の状態に応じて制御される。
【0040】
移動速度Vj及びAGCゲインGjを取得すると、マイクロコンピュータ400は、判定閾値設定部430の処理として、調整係数α,β(0<α<1,0<β<1)を用いて、次式(1)により、AF評価値のピークを検出するための閾値THを設定する(ステップS760)。
TH=α×β×AFmax・・・(1)
【0041】
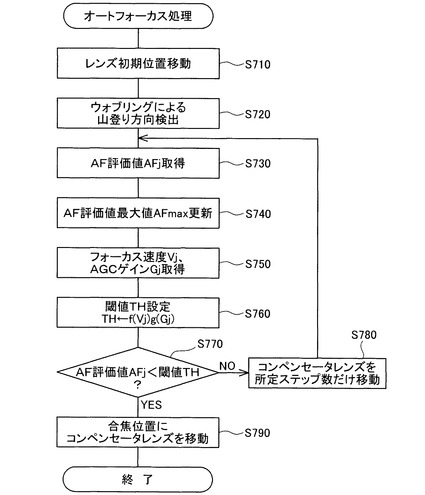
ここで、調整係数α,βについて説明する。本実施例においては、調整係数α,βは、閾値THを可変に調節するための係数である。調整係数αは、移動速度Vjをパラメータとして、調整係数βは、AGCゲインGjをパラメータとして、それぞれ閾値係数算出関数455に基づいて算出される。閾値係数算出関数455の特性の具体例を図3に示す。図3(a)は、移動速度Vjと調整係数αとの関係を示している。図示するように、調整係数αは、移動速度Vjが速くなるに従って、調整係数αが増加する一次関数として設定されている。また、図3(b)は、AGCゲインGjと調整係数βとの関係を示している。図示するように、調整係数βは、AGCゲインGjが大きくなるに従って、調整係数βの減少率が大きくなる関数として設定されている。
【0042】
上述した閾値係数算出関数455の特性は一例であり、移動速度Vjが速くなるに従って調整係数αが増加し、AGCゲインGjが大きくなるに従って、調整係数βが減少するものであればよい。実際には、移動速度VjやAGCゲインGjの変動によるAF評価値AFjへの影響度は、カメラの特性と光学系の特性によって異なるため、当該特性に基づいて実験的に、閾値係数算出関数455の最適な特性を定めることが望ましい。
【0043】
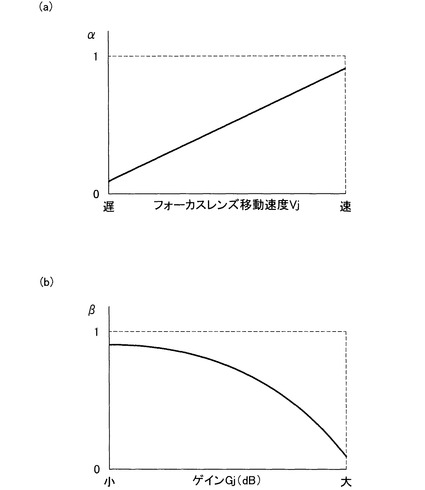
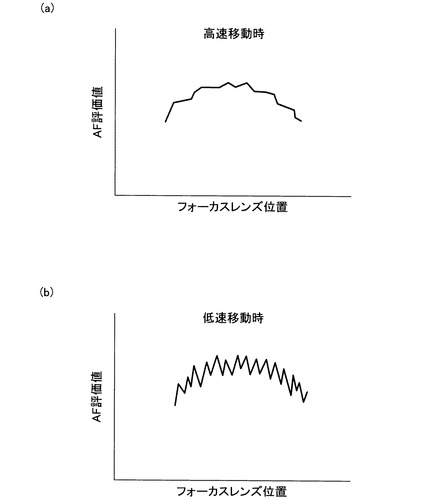
上述のように閾値係数算出関数455を設定する理由について以下に説明する。図7を用いて上述したように、AF評価値は、移動速度Vjが相対的に高速になると、光学系の積分効果が大きくなることで、相対的に小さくなり、逆に、移動速度Vjが相対的に遅くなると、相対的に大きくなる特性を有している。また、AF評価値は、上述の積分効果に起因して、移動速度Vjが相対的に高速となると、図4(a)に示すように大きさのばらつきが小さくなり、移動速度Vjが相対的に遅くなると、図4(b)に示すように大きさのばらつきが大きくなる特性を有している。
【0044】
つまり、移動速度Vjが相対的に速い場合には、最大値AFmaxが小さくなり、ばらつきも小さくなるため、換言すれば、ランダムノイズが減少するので、閾値THを相対的に大きくしても、合焦位置を精度良く検出することができる。また、閾値THを相対的に大きくするので、最大値AFmaxが小さくなっても、合焦位置の検出性能を向上させることができる。一方、移動速度Vjが相対的に遅い場合には、最大値AFmaxが大きくなり、ばらつきも大きくなるため、換言すれば、ランダムノイズが増加するので、合焦位置を精度良く検出するために、閾値THを小さくすることが望ましい。
【0045】
また、同様に、AGCゲインGjが相対的に小さいと、ランダムノイズが減少するので、閾値THを相対的に大きくしても、合焦位置を精度良く検出することができる。一方、AGCゲインGjが相対的に大きいと、ランダムノイズが増幅されるので、合焦位置を精度良く検出するために、閾値THを小さくすることが望ましい。
【0046】
このようにして閾値THを算出すると、マイクロコンピュータ400は、合焦位置判定部440の処理として、上記ステップS730で取得された現在のコンペンセータレンズ150の位置におけるAF評価値AFjが閾値THより小さいか否かを判断する(ステップS770)。その結果、AF評価値AFjが閾値THよりも小さければ(ステップS770:YES)、マイクロコンピュータ400は、合焦位置判定部440の処理として、RAM460に記憶された最大値AFmaxが取得されたコンペンセータレンズ150の位置を合焦位置と判断し、この位置を読み出して、フォーカスドライバ570を介してフォーカスモータ530に指令を与えて、コンペンセータレンズ150を合焦位置に移動させ(ステップS790)、オートフォーカス処理を終了する。
【0047】
一方、AF評価値AFjが閾値TH以上であれば(ステップS770:NO)、マイクロコンピュータ400は、コンペンセータレンズ150を所定ステップ数だけ山登り方向に移動させ(ステップS780)、上記ステップS730に処理を戻し、上記ステップS770においてAF評価値AFjが閾値THより小さくなるまでこの一連の処理を繰り返す。
【0048】
かかる構成のデジタルビデオカメラ10は、閾値THを移動速度Vjに基づいて算出される調整係数αの割合だけ、最大値AFmaxを小さくした値として設定することができる。従って、移動速度Vjが速いために、最大値AFmaxが小さくなってしまう場合には、閾値THを相対的に大きく設定して、閾値THがオフセット評価値AFoffよりも小さくなることを抑制して、合焦位置の判定性能を向上させることが出来る。また、移動速度Vjが速い場合には、ランダムノイズが減少するので、閾値THを相対的に大きく設定しても、精度良く合焦位置の判定を行うことが出来る。また、低コントラストの被写体に対しても、移動速度Vjを速くすることができるので、オートフォーカス処理に要する時間を高速化することができる。また、移動速度Vjが遅い場合には、閾値THを相対的に大きく設定して、高速かつ、精度良く合焦位置の判定を行うことが出来る。
【0049】
また、デジタルビデオカメラ10は、AGCゲインGjの大きさによって、AF評価値AFjが影響を受けるので、AGCゲインGjの大きさによって調整係数αの値を、βを用いて修正することにより、こうした影響を抑制することができる。例えば、AGCゲインGjが大きい場合にはノイズも大きくなりやすいので、調整係数βを、AGCゲインGjが大きいほど小さく修正することにより、ノイズの影響を抑制することができる。
【0050】
また、デジタルビデオカメラ10は、特殊な回路の付加を要することなく、閾値THを好適に制御することができる。つまり、装置構成の複雑化やコストアップを抑制しつつ、上述の効果を得ることができる。
【0051】
上述の実施形態の変形例について説明する。
B.変形例:
B−1.変形例1:
上述の実施形態においては、移動速度Vjに基づく調整係数α及びAGCゲインGjに基づく調整係数βを閾値係数算出関数455によって算出する構成としたが、調整係数α,βの算出方法は、関数を用いる方法に限られるものではない。例えば、移動速度Vjと調整係数α、AGCゲインGjと調整係数βとをそれぞれ対応付けたテーブルをROM450などに記憶しておき、マイクロコンピュータ400が当該テーブルを参照して、取得した移動速度Vj及びAGCゲインGjに応じた調整係数α,βを設定する構成としてもよい。
【0052】
かかるテーブルは、所定範囲ごとに区分された移動速度Vj及びAGCゲインGjの値ごとに調整係数α,βと対応付けてもよいし、移動速度Vj及びAGCゲインGjの代表値と、それに対応する調整係数α,βとを対応付けておき、代表値以外の移動速度Vj及びAGCゲインGjに対しては、代表値に基づく補間を行って、対応する調整係数α,βを算出してもよい。また、かかるテーブルは、移動速度Vjと調整係数α、AGCゲインGjと調整係数βとをそれぞれ対応付けた1次元のテーブルとして用意してもよいし、移動速度Vj及びAGCゲインGjと調整係数γ(=α×β)とを対応付けた2次元のテーブルとして用意してもよい。このようにテーブルを用いて調整係数α,βを設定する構成とすれば、処理を高速化することができる。
【0053】
B−2.変形例2:
上述の実施形態においては、閾値THは、移動速度Vj及びAGCゲインGjをパラメータとして設定する構成としたが、閾値THは、少なくとも移動速度Vjをパラメータとして設定すればよい。例えば、処理を高速化したい場合、マニュアル設定によってAGCゲインが固定されているような場合、AGCゲインの違いによるノイズの大きさの変化が無視できる場合などには、移動速度Vjのみをパラメータとして、次式(2)により閾値THを設定してもよい。
TH=α×AFmax・・・(2)
【0054】
B−3.変形例3:
上述の実施形態においては、以下に再掲する式(1)により、閾値THを設定する構成としたが、閾値THの算出式は、かかる例に限るものではなく、少なくとも移動速度Vjに基づいて定まる調整係数αを用いて動的に設定するものであればよい。例えば、次式(3)や次式(4)により、閾値THを設定してもよい。なお、調整係数α,βの設定方法は、上述の実施形態と同様である。
TH=α×AFmax・・・(1)
TH=α×β×(AFmax−AFoff)+AFoff・・・(3)
TH=α×(AFmax−AFoff)+AFoff・・・(4)
【0055】
このように、閾値THを設定しても、実施例と同様の効果を奏することができる。また、閾値THの設定に際して、オフセット評価値AFoffを考慮しているので、具体的には、閾値THが必ずオフセット評価値AFoffよりも大きくなるように考慮しているので、低コントラストの被写体に対して移動速度Vjを速く設定して合焦位置の判定を行う場合やオフセット評価値AFoffが大きい場合などでも、合焦位置を確実に判定することができる。
【0056】
B−4.変形例4:
上述のオートフォーカス処理においては、ステップS730でAF評価値AFjを取得する度に、ステップS760において閾値THを設定し直す構成としたが、ステップS750で取得した移動速度VjやAGCゲインGjの値に応じて、閾値THを設定し直すか否かを決定する構成としてもよい。例えば、移動速度VjやAGCゲインGjの値が、前回のステップS750で取得した移動速度VjやAGCゲインGjの値との差がない場合や、当該差が所定値以内である場合には、閾値THの設定を省略し、前回のステップS760において設定した閾値THを用いて、ステップS770の合焦判定を行ってもよい。こうすれば、合焦判定に大きな影響を与えない範囲での閾値THの変化しかないことが明らかな場合まで、閾値THを設定し直す必要がなく、処理を高速化できる。
【0057】
以上、本発明の実施形態について説明したが、上述した実施形態における本発明の構成要素のうち、独立クレームに記載された要素以外の要素は、付加的な要素であり、適宜省略可能である。また、本発明はこうした実施形態に限られるものではなく、本発明の要旨を脱しない範囲において、種々なる態様で実施できることは勿論である。例えば、実施例においては、コンペンセータレンズ150の位置を移動させることによりオートフォーカス制御を行うデジタルビデオカメラについて例示したが、CCD200を移動させたり、固定第2レンズ140の形状を電圧で変化させたりして、オートフォーカス制御を行うデジタルビデオカメラに対しても適用可能である。もとより、実施例に示した遠隔会議用のデジタルカメラに限らず、監視用のデジタルカメラ、業務用のデジタルビデオカメラ、民生用のハンディデジタルビデオカメラ、携帯電話搭載のデジタルビデオカメラ、ネットワークカメラなど、種々の撮像装置として実現可能である。
【符号の説明】
【0058】
10…デジタルビデオカメラ
100…レンズブロック
110…固定第1レンズ
120…バリエータレンズ
130…アイリス
140…固定第2レンズ
150…コンペンセータレンズ
170,190…位置検出装置
180…絞り値検出装置
200…CCD
310…サンプルホールド及びAGC回路
320…DSP
330…AF回路
400…マイクロコンピュータ
410…フォーカス速度検出部
420…カメラゲイン検出部
430…判定閾値設定部
440…合焦位置判定部
450…ROM
455…閾値係数算出関数
460…RAM
510…ズームモータ
520…アイリスモータ
530…フォーカスモータ
550…ズームドライバ
560…アイリスドライバ
570…フォーカスドライバ
600…出力インターフェース
【技術分野】
【0001】
本発明は、合焦状態を調整するフォーカスレンズを備えた光学系を有する撮像装置の焦点調節技術に関する。
【背景技術】
【0002】
近年、デジタル技術の発展に伴い、デジタルビデオカメラなどの電子カメラが普及している。これらの電子カメラには、通常、被写体に対してフォーカスレンズを自動合焦させるオートフォーカス機構が設けられている。このようなオートフォーカス機構のひとつに、いわゆる山登り方式と呼ばれる方式がある(例えば、下記特許文献1)。この山登り方式では、フォーカスレンズの位置を光軸方向に前後に動作させながら、CCDなどの撮像素子から得られる輝度信号の高周波成分を検波回路で検波した評価値(以下、「AF評価値」ともいう)を取得し、AF評価値がピークとなるフォーカスレンズの位置が合焦位置であるとしてフォーカスレンズの位置が制御される(以下、「AF動作」ともいう)。このように高周波成分を合焦評価に用いるのは、撮像画像のエッジを形成する部分は高周波成分を多く含むので、同じ被写界から得られた撮像画像であれば、AF評価値が大きいほどエッジが強い、すなわち合焦度が高いといえるからである。
【0003】
このようなフォーカスレンズの位置とAF評価値との関係を図5に例示する。図5に示すように、合焦位置では、AF評価値が最大となり、合焦位置から離れるに従って、AF評価値は小さくなる。そしてフォーカスレンズの位置が合焦位置から、所定位置だけ離れると、AF評価値はそれ以上小さくならない。撮像された映像の内容が判定不能なほどに大きくボケた状態になると、輝度信号の周波数成分に変化がなくなるので、その結果、AF評価値も変化しなくなるからである。このような変化がなくなった状態のAF評価値をオフセット評価値AFoffともいう。
【0004】
かかるAF動作について、更に図6を用いて説明する。AF動作が開始されると、まず、ウォブリング動作によって、AF評価値が増加するフォーカスレンズの移動方向が決定される。ウォブリング動作とは、フォーカスレンズを微小移動させて、その際に検出されるAF評価値の増減により、AF評価値がピークに向かうフォーカスレンズの移動方向を判定する動作である。図6に示すように、フォーカスレンズが位置P1にある場合にウォブリング動作が行われ、フォーカスレンズの移動方向が位置P1からピーク側(位置P3側)に向かう方向に決定されると、当該方向に所定距離ずつフォーカスレンズを移動してAF評価値が検出される。移動した位置におけるAF評価値が、以前のAF評価値よりも大きい場合には、AF評価値の最大値である最大値AFmaxが更新される。
【0005】
そして、一旦、ピーク位置(位置P3)を超えて、閾値THまでAF評価値が低下すると(フォーカスレンズが位置P2まで移動すると)、それまでの動作における最大値AFmaxが得られたときのフォーカスレンズの位置、すなわち、位置P3が合焦位置と判定され、フォーカスレンズが位置P3まで移動される。このように、最大値AFmaxよりもAF評価値が閾値THだけ低下して初めて、ピーク位置を判定するのは、映像信号には、時間によって変化するランダムノイズが含まれ、AF評価値はフォーカスレンズが停止している状態であっても一定の変動が生じるので、このような変動誤差を踏まえて、精度良くピーク位置を判定するためである。なお、通常、閾値THは、最大値AFmaxを固定の所定割合だけ減じた値などとして設定される。
【0006】
しかしながら、上述したオートフォーカス装置には、撮像状況によっては、以下の問題が生じていた。具体的には、上述したオートフォーカス装置においては、高コントラストの被写体を撮像した場合には、撮像素子から得られる輝度信号には高周波成分が多く含まれるために、AF評価値は相対的に大きくなる。一方、低コントラストの被写体を撮像した場合には、撮像素子から得られる輝度信号には高周波成分が少ないので、AF評価値は相対的に小さくなる。また、フォーカスレンズを高速で移動させると、光学系の積分効果が大きくなるために、高周波成分が大きく低下し、AF評価値が相対的に小さくなる。一方、フォーカスレンズを低速で移動させると、光学系の積分効果が小さくなるために、高周波成分がそれほど低下せず、AF評価値が相対的に大きくなる。
【0007】
このような現象の具体例を図7に示す。図7(a)は、高コントラスト被写体に対して、フォーカスレンズの移動速度を変化させた場合のAF評価値の変化を示している。図7(b)は、低コントラスト被写体に対して、フォーカスレンズの移動速度を変化させた場合のAF評価値の変化を示している。高コントラスト被写体と低コントラスト被写体とを比べると、上述した積分効果の影響によって、高コントラスト被写体の方が、低コントラスト被写体と比べて、ピーク時のAF評価値が小さくなっている。また、高コントラスト被写体、低コントラスト被写体のいずれの場合においても、フォーカスレンズの移動速度が低速、中速、高速となるに従って、ピーク時のAF評価値が小さくなっている。
【0008】
ここで、図7(a)に示すように、高コントラスト被写体に対しては、AF評価値が比較的大きくなるために、フォーカスレンズの移動速度が高速であっても、最大値AFmaxに所定割合R(O<R<1)を乗じて算出された閾値THは、オフセット評価値AFoffよりも大きくなる。その結果、ピーク位置の検出が可能である。一方、図7(b)に示すように、低コントラスト被写体に対しては、AF評価値が比較的小さくなるために、フォーカスレンズの移動速度が高速になると、最大値AFmaxに所定割合Rを乗じて算出された閾値THは、オフセット評価値AFoffよりも小さくなることがある。その結果、ピーク位置の検出ができなくなるのである。
【0009】
このような問題に対して、閾値THを大きく設定することも考えられるが、閾値THを大きくすると、特にフォーカスレンズの低速移動時に、上述したノイズの影響を十分に解消できずに、合焦位置の誤検出を行う可能性が高くなるという弊害を招くことなる。なお、逆に、閾値THを小さくすると、合焦位置の誤検出を行う可能性は低下するが、AF動作におけるフォーカスレンズの移動量が増加するために、撮像結果がより振動的になってしまい、ユーザにとっては不快な動作となるので、一般的には、閾値THは、合焦位置の検出精度と撮像結果の振動の程度との兼ね合いで設定される。また、低コントラスト被写体に対して、常にフォーカスレンズの移動速度を低速化することも考えられるが、常に移動速度を低速化すると、AF動作時間が長くなるという弊害を招くこととなる。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】特開2008−170507号公報
【発明の概要】
【発明が解決しようとする課題】
【0011】
上述の問題を踏まえ、本発明が解決しようとする課題は、様々な撮像条件に対して好適に合焦位置の検出を行える焦点調節技術を提供することである。
【課題を解決するための手段】
【0012】
本発明は、上述の課題の少なくとも一部を解決するためになされたものであり、以下の形態又は適用例として実現することが可能である。
【0013】
[適用例1]合焦状態を調整するフォーカスレンズを備えた光学系を有する撮像装置であって、
前記光学系により得られた光学像を映像信号に変換する撮像手段と、
前記映像信号を所定のゲインで調整し、該調整された映像信号から、少なくとも、前記光学系を介して得られた光学像に含まれる高周波成分を含む帯域の信号の強度を合焦評価値として抽出する合焦評価値抽出手段と、
前記光学系の前記フォーカスレンズを前記合焦評価値が増大する方向への移動を開始し、前記移動に伴って前記検出される合焦評価値の最大値を保持する最大値保持手段と、
前記合焦評価値を検出する際の前記フォーカスレンズの移動速度に基づく割合だけ、前記最大値を小さくした値として、判定閾値を設定する判定閾値設定手段と、
前記設定された判定閾値と前記合焦評価値とを比較し、前記合焦評価値が前記判定閾値を下回ったとき、前記合焦評価値が最大値となった時の前記フォーカスレンズの位置を、合焦位置と判定する合焦位置判定手段と、
該合焦位置に前記フォーカスレンズを制御する合焦制御手段と
を備えた撮像装置。
【0014】
かかる撮像装置によれば、判定閾値を、光学系のフォーカスレンズの移動速度に基づく割合だけ、前記最大値を小さくした値として設定することができる。従って、フォーカスレンズの移動速度が速いために、合焦評価値の最大値が小さくなってしまう場合でも、合焦の位置の判定に対して望ましい判定閾値を設定することが出来る。しかも、フォーカスレンズの移動速度が低い場合には、判定閾値を異なる割合だけ小さくできるので、フォーカスレンズの移動速度が低い場合と高い場合で、それぞれ望ましい判定閾値の設定を行なうことができる。
【0015】
[適用例2]適用例1記載の撮像装置であって、前記判定閾値設定手段は、前記判定閾値を、判定閾値=α×最大値として決定し、前記係数αを、前記フォーカスレンズの移動速度が高いほど大きな値(但し、αは値1未満)として設定する撮像装置。
【0016】
かかる撮像装置では、判定閾値の設定に、係数を用いており、最大値との関係を明確に把握することができる。しかも、この係数αを、フォーカスレンズの移動速度が高いほど大きな値(但し、αは値1未満)として設定するので、フォーカスレンズの移動速度か速いために、合焦評価値の最大値が小さくなってしまう場合には、判定閾値を高くでき、合焦の位置の判定を確実に行なうことができる。しかも、フォーカスレンズの移動速度が低い場合には、判定閾値を低く設定するので、ノイズなどによる誤判定を抑制することができる。
【0017】
[適用例3]適用例1記載の撮像装置であって、前記合焦評価値が、前記フォーカスレンズの所定範囲での移動によっても変化しない位置で検出された前記合焦評価値をオフセット値として学習する学習手段を備えると共に、前記判定閾値設定手段は、前記判定閾値を、判定閾値=α×(最大値−オフセット値)+オフセット値として決定し、前記係数αを、前記フォーカスレンズの移動速度が高いほど大きな値(但し、αは値1未満)として設定する撮像装置。
【0018】
かかる撮像装置では、適用例2と同様の効果を奏するうえ、判定閾値の設定に際して、オフセット値を考慮しているので、オフセット値が大きい場合などでも、判定閾値を確実に設定することができる。
【0019】
[適用例4]適用例1ないし適用例3のいずれか記載の撮像装置であって、前記判定閾値設定手段は、前記係数αの値を、前記ゲインの大きさによって修正する撮像装置。
かかる撮像装置では、ゲインの大きさによって、合焦判定値は影響を受けるので、ゲインの大きさによって係数αの値を修正することにより、こうした影響を抑制することができる。例えば、ゲインが大きい場合にはノイズも大きくなりやすいので、係数αを、ゲインが大きいほど小さく修正することにより、ノイズの影響を抑制することができる。
【0020】
[適用例5]適用例1ないし適用例4のいずれか記載の撮像装置であって、前記光学系は、該光学系を構成する複数のレンズに含まれる前記フォーカスレンズの位置を移動することにより、焦点距離を調整可能なレンズユニットと、前記フォーカスレンズを移動する移動用アクチュエータとを備える撮像装置。
【0021】
かかる撮像装置では、移動用アクチュエータを用いて、フォーカスレンズを容易に移動することができる。またこのアクチュエータに対する制御量を測るか、あるいはこのアクチュエータにセンサを設けて検出すれば、フォーカスレンズの移動速度を容易に検出することができる。
【0022】
[適用例6]合焦状態を調整するフォーカスレンズを備えた光学系を用いて撮像装置の焦点を調節する方法であって、前記光学系により得られた光学像を映像信号に変換し、前記映像信号を所定のゲインで調整し、該調整された映像信号から、少なくとも、前記光学系を介して得られた光学像に含まれる高周波成分を含む帯域の信号の強度を合焦評価値として抽出し、前記光学系の前記フォーカスレンズを前記合焦評価位置が増大する方向への移動を開始し、前記移動に伴って前記検出される合焦評価値の最大値を保持し、前記合焦評価値を検出する際の前記フォーカスレンズの移動速度に基づく割合だけ、前記最大値を小さくした値として、判定閾値を設定し、前記設定された判定閾値と前記合焦評価値とを比較し、前記合焦評価値が前記判定閾値を下回ったとき、前記合焦評価値が最大値となった時の前記フォーカスレンズの位置を、合焦位置と判定し、該合焦の位置に向けて、前記フォーカスレンズの移動を開始することで、前記焦点調整の動作を繰り返す焦点調節方法。
【0023】
かかる焦点調節方法によれば、判定閾値を、光学系のフォーカスレンズの移動速度に基づく割合だけ、前記最大値を小さくした値として設定することができる。従って、フォーカスレンズの移動速度が速いために、合焦評価値の最大値が小さくなってしまう場合でも、合焦の位置の判定に対して望ましい判定閾値を設定することが出来る。しかも、フォーカスレンズの移動速度が低い場合には、判定閾値を異なる割合だけ小さくできるので、フォーカスレンズの移動速度が低い場合と高い場合で、それぞれ望ましい判定閾値の設定を行なうことができる。
【0024】
なお、本発明は、上述した撮像装置や焦点調節方法としてのほか、焦点調節プログラム、当該プログラムを記録した記憶媒体等としても実現することができる。
【図面の簡単な説明】
【0025】
【図1】本発明の実施例としてのデジタルビデオカメラ10の概略構成を示す説明図である。
【図2】デジタルビデオカメラ10のオートフォーカス処理の手順を示すフローチャートである。
【図3】オートフォーカス処理に用いる閾値THを設定するための閾値係数算出関数455の特性を示す説明図である。
【図4】コンペンセータレンズ150の移動速度によるAF評価値へのノイズの影響の違いを示す説明図である。
【図5】フォーカスレンズの位置に応じた合焦状態とAF評価値との関係を示す説明図である。
【図6】山登り方式によるオートフォーカスの仕組みを示す説明図である。
【図7】被写体のコントラストとフォーカスレンズの移動速度がAF評価値に及ぼす影響を示す説明図である。
【発明を実施するための形態】
【0026】
本発明の実施例について説明する。
A.実施例:
A−1.デジタルビデオカメラ10の概略構成:
図1は、本発明の実施例としてのデジタルビデオカメラ10の概略構成を示す説明図である。デジタルビデオカメラ10は、山登り方式のオートフォーカス機構を備えた遠隔会議用カメラであり、レンズブロック100、CCD200、サンプルホールド(S/H)及びAGC(Automatic Gain Control)回路310、DSP(Digital Signal Processor)320、AF回路330、マイクロコンピュータ400、レンズ等駆動モータ510〜530、レンズ等ドライバ550〜570、出力インターフェース600を備えている。
【0027】
レンズブロック100は、固定第1レンズ110、変倍機能を持つ可動式のバリエータレンズ120、レンズを通過する光量を制御するアイリス130、固定第2レンズ140、フォーカス機能と変倍時に焦点位置補正を行う機能とを持つ可動式のコンペンセータレンズ150、バリエータレンズ120及びコンペンセータレンズ150の位置をそれぞれ検出する位置検出装置170及び190、アイリス130の絞り値を検出する絞り値検出装置180から構成される。これらのレンズ群は、入射された被写界の光学像の倍率、光量、焦点を調整して、CCD200の面上に結像させる。なお、本実施例においては、上述の各レンズは、説明の便から単一のレンズとして示しているが、複数のレンズから構成されてもよい。コンペンセータレンズ150は、請求項のフォーカスレンズに該当する。
【0028】
CCD200は、結像された光学像を電気信号に変換する撮像素子である。なお、本実施例では、撮像素子としてCCDを用いたが、CMOSなど他の撮像素子を用いてもよい。
【0029】
サンプルホールド及びAGC回路310は、CCD200の出力からスイッチングノイズを除去して信号成分を取り出すとともに、出力信号レベルが一定になるようにゲインを制御する回路である。DSP320は、サンプルホールド及びAGC回路310から出力されたアナログ信号をデジタル信号へ変換して、輝度信号やクロマ信号を生成すると共に、ガンマ補正、アパーチャ補正、ホワイトバランス調整等の処理を行う専用のプロセッサである。AF回路330は、DSPから出力された映像信号から、後述するAF評価値を検出する回路であり、ハイパスフィルタ、絶対値回路、検波回路等で構成される。AF評価値は、請求項の合焦評価値に該当し、AF回路330は、請求項の合焦評価値抽出手段に該当する。
【0030】
ズームモータ510,フォーカスモータ530は、ズームドライバ560、フォーカスドライバ570の制御を受けて、バリエータレンズ120,コンペンセータレンズ150の位置を移動させて、倍率調整または焦点調整を行うためのステッピングモータである。また、アイリスモータ520は、アイリスドライバ560の制御を受けて、アイリス130を開閉して光量を調整するためのガルバノメータである。
【0031】
マイクロコンピュータ400は、ROM450に記憶された制御プログラムをRAM460に展開して実行することで、デジタルビデオカメラ10の動作全体を制御するほか、フォーカス速度検出部410、カメラゲイン検出部420、判定閾値設定部430、合焦位置判定部440としても機能する。これらの機能の詳細については後述する。ROM450には、マイクロコンピュータ400が用いる、デジタルビデオカメラ10の動作に必要な制御プログラムのほか、後述する閾値係数算出関数455が記憶されている。
【0032】
出力インターフェース600は、デジタルビデオカメラ10で撮像された映像データを、ネットワークを介してモニタに出力するためのインターフェースであり、例えば、図示しないネットワークを介して、当該ネットワークに接続されたモニタの画面上で、デジタルビデオカメラ10で撮像された映像データを見ることができる。
【0033】
A−2.オートフォーカス処理:
図2は、デジタルビデオカメラ10のオートフォーカス処理の手順を示すフローチャートである。この処理が開始されると、マイクロコンピュータ400は、バリエータレンズ120及びコンペンセータレンズ150を初期位置に移動させる(ステップS710)。ここでの初期位置は、一般的に焦点が合う可能性が高いと予想されるレンズの位置であり、ROM450に記憶されたメーカー設定の初期位置である。ただし、ユーザの利用履歴等に基づいて、ユーザが頻繁に利用する撮像条件に適したレンズの位置を書き換え可能な不揮発性メモリに記憶しておき、当該位置に移動させる構成としてもよい。また、ステップS710は、オートフォーカス処理として行うことに限らず、デジタルビデオカメラ10の電源を入れて撮像を開始する時に、オートフォーカス処理の開始に先立って実行してもよい。こうすれば、オートフォーカス処理を高速化することができる。
【0034】
バリエータレンズ120及びコンペンセータレンズ150を移動させると、マイクロコンピュータ400は、ウォブリングによる山登り方向の検出を行う(ステップS720)。ウォブリングとは、コンペンセータレンズ150を前後に動かしてAF評価値を取得し、そのAF評価値の大小関係から、コンペンセータレンズ150を前後どちらの方向に移動させると、AF評価値のピークに近づけるのかを判断して、AF評価値のピークが得られる方向を山登り方向として検出する動作である。
【0035】
山登り方向の検出を行うと、マイクロコンピュータ400は、現在のコンペンセータレンズ150の位置において、AF回路330を用いて、AF評価値AFjを取得する(ステップS730)。このAF評価値は、AF回路330を用いて、ハイパスフィルタにより輝度信号の高周波成分を取り出し、取り出した高周波成分を絶対値回路により絶対値化し、更にゲート回路により測距枠として設定された範囲に該当する信号のみを抽出し、検波回路によりピーク検波することで取得される。なお、本実施例では、このハイパスフィルタは、様々な被写界に対応できるように遮断周波数を1MHzと数十kHzの2種類から選択できるようにしているが、単一の遮断周波数を用いたり、他の遮断周波数を用いたりしてもよい。また、本実施例においては、このAF評価値は、60Hzの垂直同期信号に応答して取得されるものとした。
【0036】
AF評価値AFjを取得すると、マイクロコンピュータ400は、これまでに取得したAF評価値AFjの最大値AFmaxと、最大値AFmaxを検出したコンペンセータレンズ150の位置をRAM460に記憶させる(ステップS740)。なお、初めてAF評価値AFjを取得した場合は、当然、その値とその値に対応したコンペンセータレンズ150の位置とを記憶させることとなる。
【0037】
最大値AFmax等を記憶させると、マイクロコンピュータ400は、フォーカス速度検出部410の処理として、AF評価値AFjの取得時のコンペンセータレンズ150の移動速度Vjを取得すると共に、カメラゲイン検出部420の処理として、サンプルホールド及びAGC回路310からAF評価値AFjの取得時のAGCゲインGjを取得する(ステップS750)。なお、本実施例においては、移動速度Vjは、マイクロコンピュータ400がフォーカスモータ530に対する制御量を測る構成とした。ただし、フォーカスモータ530にセンサを設けるなどして、移動速度Vjを取得してもよい。
【0038】
本実施例においては、移動速度Vjは、上記ステップS730で取得したAF評価値AFjに基づいて制御される。具体的には、AF評価値AFjがオフセット評価値AFoffに近い場合、例えば、AF評価値AFjとオフセット評価値AFoffとの差分が所定値以下の場合には、マイクロコンピュータ400は、コンペンセータレンズ150の現在の位置が合焦位置から比較的遠いと判断して、移動速度Vjが相対的に速くなるように制御する。
【0039】
一方、AF評価値AFjがオフセット評価値AFoffに遠い場合、例えば、AF評価値AFjとオフセット評価値AFoffとの差分が所定値より大きい場合には、マイクロコンピュータ400は、コンペンセータレンズ150の現在の位置が合焦位置から比較的近いと判断して、移動速度Vjが相対的に遅くなるように制御する。なお、オフセット評価値AFoffは、例えば、デジタルビデオカメラ10の電源投入時やオートフォーカス処理前に、マイクロコンピュータ400が、アイリス130を全閉した状態でAF評価値をオフセット評価値AFoffとして取得してもよいし、コンペンセータレンズ150を広い範囲で移動させて、変動が所定値以下となったAF評価値をオフセット評価値AFoffとして取得してもよい。また、本実施例においては、AGCゲインGjは、DSP320で自動調整された露出の状態に応じて制御される。
【0040】
移動速度Vj及びAGCゲインGjを取得すると、マイクロコンピュータ400は、判定閾値設定部430の処理として、調整係数α,β(0<α<1,0<β<1)を用いて、次式(1)により、AF評価値のピークを検出するための閾値THを設定する(ステップS760)。
TH=α×β×AFmax・・・(1)
【0041】
ここで、調整係数α,βについて説明する。本実施例においては、調整係数α,βは、閾値THを可変に調節するための係数である。調整係数αは、移動速度Vjをパラメータとして、調整係数βは、AGCゲインGjをパラメータとして、それぞれ閾値係数算出関数455に基づいて算出される。閾値係数算出関数455の特性の具体例を図3に示す。図3(a)は、移動速度Vjと調整係数αとの関係を示している。図示するように、調整係数αは、移動速度Vjが速くなるに従って、調整係数αが増加する一次関数として設定されている。また、図3(b)は、AGCゲインGjと調整係数βとの関係を示している。図示するように、調整係数βは、AGCゲインGjが大きくなるに従って、調整係数βの減少率が大きくなる関数として設定されている。
【0042】
上述した閾値係数算出関数455の特性は一例であり、移動速度Vjが速くなるに従って調整係数αが増加し、AGCゲインGjが大きくなるに従って、調整係数βが減少するものであればよい。実際には、移動速度VjやAGCゲインGjの変動によるAF評価値AFjへの影響度は、カメラの特性と光学系の特性によって異なるため、当該特性に基づいて実験的に、閾値係数算出関数455の最適な特性を定めることが望ましい。
【0043】
上述のように閾値係数算出関数455を設定する理由について以下に説明する。図7を用いて上述したように、AF評価値は、移動速度Vjが相対的に高速になると、光学系の積分効果が大きくなることで、相対的に小さくなり、逆に、移動速度Vjが相対的に遅くなると、相対的に大きくなる特性を有している。また、AF評価値は、上述の積分効果に起因して、移動速度Vjが相対的に高速となると、図4(a)に示すように大きさのばらつきが小さくなり、移動速度Vjが相対的に遅くなると、図4(b)に示すように大きさのばらつきが大きくなる特性を有している。
【0044】
つまり、移動速度Vjが相対的に速い場合には、最大値AFmaxが小さくなり、ばらつきも小さくなるため、換言すれば、ランダムノイズが減少するので、閾値THを相対的に大きくしても、合焦位置を精度良く検出することができる。また、閾値THを相対的に大きくするので、最大値AFmaxが小さくなっても、合焦位置の検出性能を向上させることができる。一方、移動速度Vjが相対的に遅い場合には、最大値AFmaxが大きくなり、ばらつきも大きくなるため、換言すれば、ランダムノイズが増加するので、合焦位置を精度良く検出するために、閾値THを小さくすることが望ましい。
【0045】
また、同様に、AGCゲインGjが相対的に小さいと、ランダムノイズが減少するので、閾値THを相対的に大きくしても、合焦位置を精度良く検出することができる。一方、AGCゲインGjが相対的に大きいと、ランダムノイズが増幅されるので、合焦位置を精度良く検出するために、閾値THを小さくすることが望ましい。
【0046】
このようにして閾値THを算出すると、マイクロコンピュータ400は、合焦位置判定部440の処理として、上記ステップS730で取得された現在のコンペンセータレンズ150の位置におけるAF評価値AFjが閾値THより小さいか否かを判断する(ステップS770)。その結果、AF評価値AFjが閾値THよりも小さければ(ステップS770:YES)、マイクロコンピュータ400は、合焦位置判定部440の処理として、RAM460に記憶された最大値AFmaxが取得されたコンペンセータレンズ150の位置を合焦位置と判断し、この位置を読み出して、フォーカスドライバ570を介してフォーカスモータ530に指令を与えて、コンペンセータレンズ150を合焦位置に移動させ(ステップS790)、オートフォーカス処理を終了する。
【0047】
一方、AF評価値AFjが閾値TH以上であれば(ステップS770:NO)、マイクロコンピュータ400は、コンペンセータレンズ150を所定ステップ数だけ山登り方向に移動させ(ステップS780)、上記ステップS730に処理を戻し、上記ステップS770においてAF評価値AFjが閾値THより小さくなるまでこの一連の処理を繰り返す。
【0048】
かかる構成のデジタルビデオカメラ10は、閾値THを移動速度Vjに基づいて算出される調整係数αの割合だけ、最大値AFmaxを小さくした値として設定することができる。従って、移動速度Vjが速いために、最大値AFmaxが小さくなってしまう場合には、閾値THを相対的に大きく設定して、閾値THがオフセット評価値AFoffよりも小さくなることを抑制して、合焦位置の判定性能を向上させることが出来る。また、移動速度Vjが速い場合には、ランダムノイズが減少するので、閾値THを相対的に大きく設定しても、精度良く合焦位置の判定を行うことが出来る。また、低コントラストの被写体に対しても、移動速度Vjを速くすることができるので、オートフォーカス処理に要する時間を高速化することができる。また、移動速度Vjが遅い場合には、閾値THを相対的に大きく設定して、高速かつ、精度良く合焦位置の判定を行うことが出来る。
【0049】
また、デジタルビデオカメラ10は、AGCゲインGjの大きさによって、AF評価値AFjが影響を受けるので、AGCゲインGjの大きさによって調整係数αの値を、βを用いて修正することにより、こうした影響を抑制することができる。例えば、AGCゲインGjが大きい場合にはノイズも大きくなりやすいので、調整係数βを、AGCゲインGjが大きいほど小さく修正することにより、ノイズの影響を抑制することができる。
【0050】
また、デジタルビデオカメラ10は、特殊な回路の付加を要することなく、閾値THを好適に制御することができる。つまり、装置構成の複雑化やコストアップを抑制しつつ、上述の効果を得ることができる。
【0051】
上述の実施形態の変形例について説明する。
B.変形例:
B−1.変形例1:
上述の実施形態においては、移動速度Vjに基づく調整係数α及びAGCゲインGjに基づく調整係数βを閾値係数算出関数455によって算出する構成としたが、調整係数α,βの算出方法は、関数を用いる方法に限られるものではない。例えば、移動速度Vjと調整係数α、AGCゲインGjと調整係数βとをそれぞれ対応付けたテーブルをROM450などに記憶しておき、マイクロコンピュータ400が当該テーブルを参照して、取得した移動速度Vj及びAGCゲインGjに応じた調整係数α,βを設定する構成としてもよい。
【0052】
かかるテーブルは、所定範囲ごとに区分された移動速度Vj及びAGCゲインGjの値ごとに調整係数α,βと対応付けてもよいし、移動速度Vj及びAGCゲインGjの代表値と、それに対応する調整係数α,βとを対応付けておき、代表値以外の移動速度Vj及びAGCゲインGjに対しては、代表値に基づく補間を行って、対応する調整係数α,βを算出してもよい。また、かかるテーブルは、移動速度Vjと調整係数α、AGCゲインGjと調整係数βとをそれぞれ対応付けた1次元のテーブルとして用意してもよいし、移動速度Vj及びAGCゲインGjと調整係数γ(=α×β)とを対応付けた2次元のテーブルとして用意してもよい。このようにテーブルを用いて調整係数α,βを設定する構成とすれば、処理を高速化することができる。
【0053】
B−2.変形例2:
上述の実施形態においては、閾値THは、移動速度Vj及びAGCゲインGjをパラメータとして設定する構成としたが、閾値THは、少なくとも移動速度Vjをパラメータとして設定すればよい。例えば、処理を高速化したい場合、マニュアル設定によってAGCゲインが固定されているような場合、AGCゲインの違いによるノイズの大きさの変化が無視できる場合などには、移動速度Vjのみをパラメータとして、次式(2)により閾値THを設定してもよい。
TH=α×AFmax・・・(2)
【0054】
B−3.変形例3:
上述の実施形態においては、以下に再掲する式(1)により、閾値THを設定する構成としたが、閾値THの算出式は、かかる例に限るものではなく、少なくとも移動速度Vjに基づいて定まる調整係数αを用いて動的に設定するものであればよい。例えば、次式(3)や次式(4)により、閾値THを設定してもよい。なお、調整係数α,βの設定方法は、上述の実施形態と同様である。
TH=α×AFmax・・・(1)
TH=α×β×(AFmax−AFoff)+AFoff・・・(3)
TH=α×(AFmax−AFoff)+AFoff・・・(4)
【0055】
このように、閾値THを設定しても、実施例と同様の効果を奏することができる。また、閾値THの設定に際して、オフセット評価値AFoffを考慮しているので、具体的には、閾値THが必ずオフセット評価値AFoffよりも大きくなるように考慮しているので、低コントラストの被写体に対して移動速度Vjを速く設定して合焦位置の判定を行う場合やオフセット評価値AFoffが大きい場合などでも、合焦位置を確実に判定することができる。
【0056】
B−4.変形例4:
上述のオートフォーカス処理においては、ステップS730でAF評価値AFjを取得する度に、ステップS760において閾値THを設定し直す構成としたが、ステップS750で取得した移動速度VjやAGCゲインGjの値に応じて、閾値THを設定し直すか否かを決定する構成としてもよい。例えば、移動速度VjやAGCゲインGjの値が、前回のステップS750で取得した移動速度VjやAGCゲインGjの値との差がない場合や、当該差が所定値以内である場合には、閾値THの設定を省略し、前回のステップS760において設定した閾値THを用いて、ステップS770の合焦判定を行ってもよい。こうすれば、合焦判定に大きな影響を与えない範囲での閾値THの変化しかないことが明らかな場合まで、閾値THを設定し直す必要がなく、処理を高速化できる。
【0057】
以上、本発明の実施形態について説明したが、上述した実施形態における本発明の構成要素のうち、独立クレームに記載された要素以外の要素は、付加的な要素であり、適宜省略可能である。また、本発明はこうした実施形態に限られるものではなく、本発明の要旨を脱しない範囲において、種々なる態様で実施できることは勿論である。例えば、実施例においては、コンペンセータレンズ150の位置を移動させることによりオートフォーカス制御を行うデジタルビデオカメラについて例示したが、CCD200を移動させたり、固定第2レンズ140の形状を電圧で変化させたりして、オートフォーカス制御を行うデジタルビデオカメラに対しても適用可能である。もとより、実施例に示した遠隔会議用のデジタルカメラに限らず、監視用のデジタルカメラ、業務用のデジタルビデオカメラ、民生用のハンディデジタルビデオカメラ、携帯電話搭載のデジタルビデオカメラ、ネットワークカメラなど、種々の撮像装置として実現可能である。
【符号の説明】
【0058】
10…デジタルビデオカメラ
100…レンズブロック
110…固定第1レンズ
120…バリエータレンズ
130…アイリス
140…固定第2レンズ
150…コンペンセータレンズ
170,190…位置検出装置
180…絞り値検出装置
200…CCD
310…サンプルホールド及びAGC回路
320…DSP
330…AF回路
400…マイクロコンピュータ
410…フォーカス速度検出部
420…カメラゲイン検出部
430…判定閾値設定部
440…合焦位置判定部
450…ROM
455…閾値係数算出関数
460…RAM
510…ズームモータ
520…アイリスモータ
530…フォーカスモータ
550…ズームドライバ
560…アイリスドライバ
570…フォーカスドライバ
600…出力インターフェース
【特許請求の範囲】
【請求項1】
合焦状態を調整するフォーカスレンズを備えた光学系を有する撮像装置であって、
前記光学系により得られた光学像を映像信号に変換する撮像手段と、
前記映像信号を所定のゲインで調整し、該調整された映像信号から、少なくとも、前記光学系を介して得られた光学像に含まれる高周波成分を含む帯域の信号の強度を合焦評価値として抽出する合焦評価値抽出手段と、
前記光学系の前記フォーカスレンズを前記合焦評価値が増大する方向への移動を開始し、前記移動に伴って前記検出される合焦評価値の最大値を保持する最大値保持手段と、
前記合焦評価値を検出する際の前記フォーカスレンズの移動速度に基づく割合だけ、前記最大値を小さくした値として、判定閾値を設定する判定閾値設定手段と、
前記設定された判定閾値と前記合焦評価値とを比較し、前記合焦評価値が前記判定閾値を下回ったとき、前記合焦評価値が最大値となった時の前記フォーカスレンズの位置を、合焦位置と判定する合焦位置判定手段と、
を備えた撮像装置。
【請求項2】
請求項1記載の撮像装置であって、
前記判定閾値設定手段は、前記判定閾値を、
判定閾値=α×最大値
として決定し、前記係数αを、前記フォーカスレンズの移動速度が高いほど大きな値(但し、αは値1未満)として設定する撮像装置。
【請求項3】
請求項1記載の撮像装置であって、
前記合焦評価値が、前記フォーカスレンズの所定範囲での移動によっても変化しない位置で検出された前記合焦評価値をオフセット値として学習する学習手段を備えると共に、
前記判定閾値設定手段は、前記判定閾値を、
判定閾値=α×(最大値−オフセット値)+オフセット値
として決定し、前記係数αを、前記フォーカスレンズの移動速度が高いほど大きな値(但し、αは値1未満)として設定する撮像装置。
【請求項4】
請求項1ないし請求項3のいずれか記載の撮像装置であって、
前記判定閾値設定手段は、前記係数αの値を、前記ゲインの大きさによって修正する撮像装置。
【請求項5】
請求項1ないし請求項4のいずれか記載の撮像装置であって、
前記光学系は、
該光学系を構成する複数のレンズに含まれる前記フォーカスレンズの位置を移動することにより、焦点距離を調整可能なレンズユニットと、
前記フォーカスレンズを移動する移動用アクチュエータと
を備える撮像装置。
【請求項6】
合焦状態を調整するフォーカスレンズを備えた光学系を用いて撮像装置の焦点を調節する方法であって、
前記光学系により得られた光学像を映像信号に変換し、
前記映像信号を所定のゲインで調整し、該調整された映像信号から、少なくとも、前記光学系を介して得られた光学像に含まれる高周波成分を含む帯域の信号の強度を合焦評価値として抽出し、
前記光学系の前記フォーカスレンズを前記合焦評価位置が増大する方向への移動を開始し、前記移動に伴って前記検出される合焦評価値の最大値を保持し、
前記合焦評価値を検出する際の前記フォーカスレンズの移動速度に基づく割合だけ、前記最大値を小さくした値として、判定閾値を設定し、
前記設定された判定閾値と前記合焦評価値とを比較し、前記合焦評価値が前記判定閾値を下回ったとき、前記合焦評価値が最大値となった時の前記フォーカスレンズの位置を、合焦位置と判定し、
該合焦の位置に向けて、前記フォーカスレンズの移動を開始することで、前記焦点調整の動作を繰り返す
焦点調節方法。
【請求項1】
合焦状態を調整するフォーカスレンズを備えた光学系を有する撮像装置であって、
前記光学系により得られた光学像を映像信号に変換する撮像手段と、
前記映像信号を所定のゲインで調整し、該調整された映像信号から、少なくとも、前記光学系を介して得られた光学像に含まれる高周波成分を含む帯域の信号の強度を合焦評価値として抽出する合焦評価値抽出手段と、
前記光学系の前記フォーカスレンズを前記合焦評価値が増大する方向への移動を開始し、前記移動に伴って前記検出される合焦評価値の最大値を保持する最大値保持手段と、
前記合焦評価値を検出する際の前記フォーカスレンズの移動速度に基づく割合だけ、前記最大値を小さくした値として、判定閾値を設定する判定閾値設定手段と、
前記設定された判定閾値と前記合焦評価値とを比較し、前記合焦評価値が前記判定閾値を下回ったとき、前記合焦評価値が最大値となった時の前記フォーカスレンズの位置を、合焦位置と判定する合焦位置判定手段と、
を備えた撮像装置。
【請求項2】
請求項1記載の撮像装置であって、
前記判定閾値設定手段は、前記判定閾値を、
判定閾値=α×最大値
として決定し、前記係数αを、前記フォーカスレンズの移動速度が高いほど大きな値(但し、αは値1未満)として設定する撮像装置。
【請求項3】
請求項1記載の撮像装置であって、
前記合焦評価値が、前記フォーカスレンズの所定範囲での移動によっても変化しない位置で検出された前記合焦評価値をオフセット値として学習する学習手段を備えると共に、
前記判定閾値設定手段は、前記判定閾値を、
判定閾値=α×(最大値−オフセット値)+オフセット値
として決定し、前記係数αを、前記フォーカスレンズの移動速度が高いほど大きな値(但し、αは値1未満)として設定する撮像装置。
【請求項4】
請求項1ないし請求項3のいずれか記載の撮像装置であって、
前記判定閾値設定手段は、前記係数αの値を、前記ゲインの大きさによって修正する撮像装置。
【請求項5】
請求項1ないし請求項4のいずれか記載の撮像装置であって、
前記光学系は、
該光学系を構成する複数のレンズに含まれる前記フォーカスレンズの位置を移動することにより、焦点距離を調整可能なレンズユニットと、
前記フォーカスレンズを移動する移動用アクチュエータと
を備える撮像装置。
【請求項6】
合焦状態を調整するフォーカスレンズを備えた光学系を用いて撮像装置の焦点を調節する方法であって、
前記光学系により得られた光学像を映像信号に変換し、
前記映像信号を所定のゲインで調整し、該調整された映像信号から、少なくとも、前記光学系を介して得られた光学像に含まれる高周波成分を含む帯域の信号の強度を合焦評価値として抽出し、
前記光学系の前記フォーカスレンズを前記合焦評価位置が増大する方向への移動を開始し、前記移動に伴って前記検出される合焦評価値の最大値を保持し、
前記合焦評価値を検出する際の前記フォーカスレンズの移動速度に基づく割合だけ、前記最大値を小さくした値として、判定閾値を設定し、
前記設定された判定閾値と前記合焦評価値とを比較し、前記合焦評価値が前記判定閾値を下回ったとき、前記合焦評価値が最大値となった時の前記フォーカスレンズの位置を、合焦位置と判定し、
該合焦の位置に向けて、前記フォーカスレンズの移動を開始することで、前記焦点調整の動作を繰り返す
焦点調節方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】

【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2010−266742(P2010−266742A)
【公開日】平成22年11月25日(2010.11.25)
【国際特許分類】
【出願番号】特願2009−118675(P2009−118675)
【出願日】平成21年5月15日(2009.5.15)
【出願人】(000000424)株式会社エルモ社 (104)
【Fターム(参考)】
【公開日】平成22年11月25日(2010.11.25)
【国際特許分類】
【出願日】平成21年5月15日(2009.5.15)
【出願人】(000000424)株式会社エルモ社 (104)
【Fターム(参考)】
[ Back to top ]