
撮像装置及び撮像装置が組み込まれた携帯機器
【課題】カメラの起動時に実行される光学エレメント位置検出装置の出力信号のオフセット補正処理時間を短縮し、電源投入から待機状態までの立上げ時間が短い高精度の撮像装置及びその撮像装置を備えた携帯機器を提供する。
【解決手段】カメラの電源を投入して制御装置(CPU)を作動させ、レンズ駆動装置及び光学エレメントの位置検出装置を作動させる。フォーカシングレンズの無限遠リセット位置への移動動作を開始させ(P41、P42)、同時にMRセンサの出力信号のオフセット補正処理を実行する(P43)。フォーカシングレンズの無限遠リセット位置への駆動完了を待ち(P44)、カメラの撮影待機状態の設定を完了する(P45)。フォーカシングレンズの無限遠リセット位置への移動期間内に位置検出装置のオフセット補正処理を実行し、補正処理のための特別な時間を要しないので、カメラの立上げ時間を短縮できる。
【解決手段】カメラの電源を投入して制御装置(CPU)を作動させ、レンズ駆動装置及び光学エレメントの位置検出装置を作動させる。フォーカシングレンズの無限遠リセット位置への移動動作を開始させ(P41、P42)、同時にMRセンサの出力信号のオフセット補正処理を実行する(P43)。フォーカシングレンズの無限遠リセット位置への駆動完了を待ち(P44)、カメラの撮影待機状態の設定を完了する(P45)。フォーカシングレンズの無限遠リセット位置への移動期間内に位置検出装置のオフセット補正処理を実行し、補正処理のための特別な時間を要しないので、カメラの立上げ時間を短縮できる。
【発明の詳細な説明】
【0001】
【発明の属する技術分野】
この発明は撮像装置、及びその撮像装置が組み込まれた携帯電話等の携帯機器に関する。
【0002】
【従来の技術】
従来の撮像装置、即ちカメラの撮影レンズ装置は、複数の光学エレメントが鏡筒内に配置されており、光学エレメントの一部は駆動機構により光軸方向に移動可能に構成され、ズーミングやフォーカシングが行われる。移動可能な光学エレメントの位置の検出は、撮影レンズ装置のズーミングやフォーカシングを行う上で不可欠なもので、精度の高い位置検出が求められている。
【0003】
このため、位置検出装置としては、磁気抵抗素子と着磁スケールとから構成されるMRセンサを使用するものがある。例えば、固定部となる鏡筒側に磁気抵抗素子を設け、移動側の光学エレメントの保持枠に着磁スケールを設けたものがある(例えば特許文献1参照)。
【0004】
【特許文献1】
特開2000−356733号公報(第2頁第2欄)。
【0005】
このような構成では、MRセンサを構成する磁気抵抗素子及び着磁スケールをそれぞれ鏡筒及び光学エレメントの保持枠の所定の位置に正確に取付ける必要があるため、取付位置を微調整する機械的な調整機構が設けられており、製造行程において、個々のMRセンサの出力を見ながら磁気抵抗素子及び着磁スケールの取付位置の微調整を行っていた。
【0006】
また、MRセンサは、日中と夜間或いは夏と冬などの環境温度の変化や経年変化により磁気抵抗素子の出力が変化し、検出精度が低下してしまう場合がある。このため、高精度の検出結果を必要とする機器では、必要に応じて何時でも磁気抵抗素子及び着磁スケールの取付位置を調整し、環境温度の変化や経年変化による磁気抵抗素子の出力変動を抑えることが求められている。
【0007】
しかしながら、上記した撮像装置で説明すれば、光学エレメントの位置を検出する磁気抵抗素子及び着磁スケールの取付位置の微調整は製造行程において実施されるだけで、光学エレメントが撮像装置に組み込まれた後は磁気抵抗素子及び着磁スケールの取付位置の微調整は実際上殆ど不可能であったため、光学エレメントの位置を高精度に検出できないという不都合があった。
【0008】
これ等の課題への対策として、上記特許文献1には、磁気抵抗素子及び着磁スケールの取付位置のずれに基づく出力変動や、環境温度の変化や経年変化による磁気抵抗素子の出力変動が生じても、ゲインやオフセット量を調整することで磁気抵抗素子の出力を一定にし、光学エレメントの位置を高精度に検出するようにする構成が提案されている。
【0009】
【発明が解決しようとする課題】
しかしながら、上記した磁気抵抗素子のゲインやオフセット量を調整して出力を一定にする構成には、ゲインやオフセット量の調整手段は開示されているが、調整に要する時間を短縮する技術や、調整を行うタイミングまでは開示されていない。この発明は上記課題を解決し、ゲインやオフセット量の調整を行うタイミングを適正に制御することにより、調整時間を最小限に短縮して撮像装置の電源の投入から待機状態に入るまでの立上げ時間を最短にすると共に、検出対象である光学エレメントの位置の検出性能を高めることを目的とする。
【0010】
【課題を解決するための手段】
この発明は上記課題を解決するもので、請求項1の発明は、複数の光学エレメントで構成された撮影用レンズと、前記光学エレメントを駆動する駆動手段と、前記駆動手段により駆動される前記光学エレメントの位置を検出する位置検出手段と、前記駆動手段及び位置検出手段を制御する制御手段とを備えた撮像装置において、前記制御手段は、撮像装置の撮像機能が起動されたときは、光学エレメントの駆動を開始させると同時に位置検出手段の出力信号の外的要因に基づく変動の補正処理を実行することを特徴とする撮像装置である。
【0011】
そして、前記撮像装置の撮像機能の起動とは、撮像装置の電源投入による撮像機能の起動である。
【0012】
そして、前記位置検出手段の出力信号の外的要因に基づく変動の補正処理とは、位置検出手段の取付誤差、環境温度の変化、位置検出手段の経年変化を含む外的要因に基づく出力信号の変動の補正処理である。
【0013】
そして、前記光学エレメントには、少くともズームレンズを構成するバリエータ、コンペンセータ、フォーカスレンズのいずれかが含まれる。
【0014】
請求項5の発明は、前記請求項1乃至4のいずれかに記載する撮像装置が組み込まれていることを特徴とする携帯機器である。
【0015】
【発明の実施の形態】
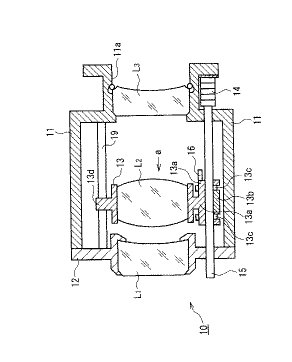
以下、この発明の実施の形態を説明する。図1は、この発明の実施の形態の撮像装置であるマイクロカメラ(MZC)の、撮影レンズ装置10の構成の概略を説明する断面図である。なお、マイクロカメラ(MZC)は、最近の携帯機器、例えば携帯電話に装備されているような極めて小型のカメラのことを指す。
【0016】
図1において、11は撮影レンズ装置10のレンズ鏡筒、12は第1レンズ保持枠で、第1レンズ保持枠12はレンズ鏡筒11の光軸方向の一方の端部に固定されており、レンズ鏡筒11の光軸方向の他方の端部付近には第3レンズ保持枠11aが形成されている。さらに、レンズ鏡筒11の内部には、移動可能に配置された第2レンズ保持枠13が配置されている。
【0017】
光学エレメントである第1レンズL1 は第1レンズ保持枠12に保持され、光学エレメントである第2レンズL2 は第2レンズ保持枠13に保持され、同じく光学エレメントである第3レンズL3 はレンズ鏡筒11に形成された第3レンズ保持枠11aに保持されており、第1レンズL1 乃至第3レンズL3 はそれぞれ光軸に対して同軸に配置されている。
【0018】
そして、駆動手段を構成するインパクト型駆動機構により、第2レンズ保持枠13を介して第2レンズL2 を光軸方向に移動させることで撮影レンズ装置10の焦点合わせを行うことができる。以下の説明では、第2レンズL2 をフォーカシングレンズということがある。なお、インパクト型駆動機構については、後で説明する。
【0019】
レンズ鏡筒11には、第2レンズL2 を駆動する圧電素子14の一端が接着固定され、圧電素子14の他端には駆動軸兼着磁ロッド15が接着固定される。駆動軸兼着磁ロッド15はレンズ鏡筒11と第1レンズ保持枠12との間に軸方向に移動可能に保持されており、この他、レンズ鏡筒11と第1レンズ保持枠12との間には案内軸19が固定配置されている。
【0020】
第2レンズ保持枠13の下側には、摩擦接触部13aとこれに対向する位置に接触部材13bが配置され、両者の間に駆動軸兼着磁ロッド15が挟持されて圧接バネ13cにより圧接され、第2レンズ保持枠13と駆動軸兼着磁ロッド15とは適当な摩擦力で摩擦結合される。
【0021】
第2レンズ保持枠13の上側には、二股状の摺動部13dが形成され、摺動部13dは案内軸19に対し軸方向に移動可能に緩みなく係合する。
【0022】
レンズ駆動機構について簡単に説明する。ここではレンズ駆動機構は圧電素子を使用した公知のインパクト型駆動機構を使用し、第2レンズ保持枠13、即ち第2レンズL2 を矢印a方向及び矢印aと反対方向に移動させることができるものである。インパクト型駆動機構は、前記した圧電素子14と駆動軸兼着磁ロッド15、及び第2レンズ保持枠13の下側に配置され、駆動軸兼着磁ロッド15を挟持して適当な摩擦力で摩擦結合する摩擦接触部13aと接触部材13b及び圧接バネ13cから構成される。
【0023】
図示しない駆動パルス発振器から出力される鋸歯状波形の駆動パルスを圧電素子14に供給する。駆動パルスの緩やかな立上り部分では圧電素子14は緩やかに厚み方向に伸び、駆動軸兼着磁ロッド15を矢印a方向に移動させるから、駆動軸兼着磁ロッド15に摩擦結合している第2レンズ保持枠13も矢印a方向に移動する。
【0024】
駆動パルスの急速な立下り部分では圧電素子14は急速に厚み方向に縮み、駆動軸兼着磁ロッド15を矢印aと反対方向に移動させるが、駆動軸兼着磁ロッド15に摩擦結合している第2レンズ保持枠13は、その慣性力が摩擦結合力に打ち勝ち、その位置に留まる。
【0025】
圧電素子14に駆動パルスを連続的に供給して速度の異なる厚み方向振動を発生させることにより、第2レンズ保持枠13は次第に矢印a方向に移動する。このとき、摺動部13dが案内軸19に対して係合しているので、第2レンズ保持枠13は光軸方向に沿って正確に移動する。第2レンズ保持枠13を矢印aと反対方向に移動させるには、急速な立上り部分と緩やかな立下り部分からなる鋸歯状波形の駆動パルスを使用すればよい。
【0026】
第2レンズ保持枠13には、第2レンズL2 (フォーカシングレンズ)の位置を検出するための磁気抵抗素子16が駆動軸兼着磁ロッド15に接近して設けられており、磁気抵抗素子16の出力信号から第2レンズL2 (フォーカシングレンズ)の位置を検出することができる。
【0027】
磁気抵抗素子と着磁ロッドから構成されるMRセンサについて説明する。MRセンサは無接触式の位置センサで、センサは小型化が容易であるから小型光学系の可動レンズの位置の検出に適した位置センサである。
【0028】
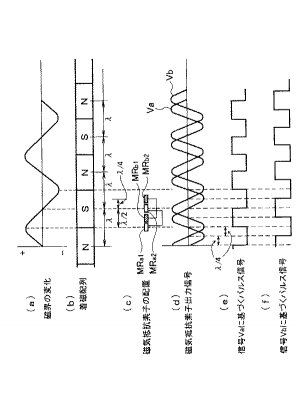
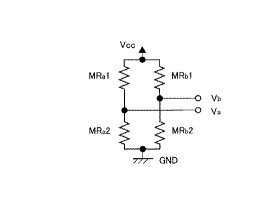
図2は、MRセンサを構成する着磁ロッドの、磁極間隔と磁気抵抗素子との配置及びその出力信号を説明する図で、図3は磁気抵抗素子の等価回路である。磁気抵抗素子はグループaの1対の素子MRa1 とMRa2 、及びグループbの1対の磁気抵抗素子MRb1 とMRb2 とが電源VccとGNDとの間に並列に接続され、グループaの磁気抵抗素子MRa1 とMRa2 との分圧点の電位Vaと、グループbの素子MRb1 とMRb2 との分圧点の電位Vbとが磁気抵抗素子の出力として利用される。
【0029】
図2の(a)は着磁ロッドの磁界の変化を示し、図2の(b)は着磁ロッドの着磁配列を示すもので、磁極NとSは一定の間隔λ(以下、着磁ピッチλという)で配列されている。図2の(c)は磁気抵抗素子の配置を示すもので、λ/2の間隔を隔てて配置されたグループaの素子MRa1 とMRa2 と、グループbの磁気抵抗素子MRb1 とMRb2 とが、λ/4の間隔を隔てて配置される。
【0030】
図2の(d)は磁気抵抗素子の出力信号を示すもので、グループaの磁気抵抗素子MRa1 とMRa2 とグループbの磁気抵抗素子MRb1 とMRb2 とがλ/4離れているから、グループaの磁気抵抗素子の出力信号Vaとグループbの磁気抵抗素子の出力信号Vbとは、位相がλ/4ずれた正弦波信号となる。
【0031】
図2の(e)はグループaの磁気抵抗素子の出力信号Vaをパルス信号変換回路で変換したパルス信号、図2の(f)はグループbの磁気抵抗素子の出力信号Vbをパルス信号変換回路で変換したパルス信号であり、これらのパルス信号の立上りパルス及び立下りパルスを計数することにより、磁気抵抗素子の移動距離をλ/4の精度で知ることができる。
【0032】
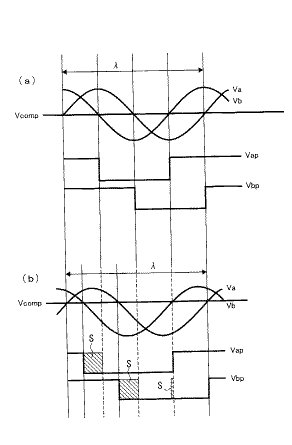
オフセットについて説明する。ここで言うオフセットとは、磁気抵抗素子の出力信号の中心電圧を変動させる電圧成分を指すものである。磁気抵抗素子は、磁気抵抗素子固有の特性のばらつきや磁気抵抗素子の温度変化特性等により、出力信号の中心電圧が変動(オフセット)する。以下、図4を参照してオフセットの発生が位置の検出に与える影響を説明する。
【0033】
図4の(a)はオフセットがない場合を説明する図である。グループaの磁気抵抗素子の出力信号Va及びグループbの磁気抵抗素子の出力信号Vbの中心電圧が理想的な状態のとき、これらの出力信号VaとVbは図4の(a)に示すように、パルス変換のための比較レベル電圧Vcompに対して正(+)側及び負(−)側にずれることなく、即ちオフセットなしに変化する。
【0034】
出力信号VaとVbを変換して得られるパルス信号VapとVbpの立上りパルス及び立下りパルスは、図4の(a)に示すように着磁ロッドの着磁ピッチλの1/4の周期で変化するから、パルスを計数することで磁気抵抗素子の移動距離をλ/4の精度で知ることができる。
【0035】
図4の(b)はオフセットがある場合を説明する図である。図示した例は、磁気抵抗素子の出力信号VaとVbの中心電圧が、パルス変換のための比較レベル電圧Vcompに対して負(−)側にずれ、即ち負(−)側にオフセットされた例である。
【0036】
この場合は、出力信号VaとVbは、共に比較レベル電圧Vcompよりも高い電圧領域が減少し低い電圧領域が増加するから、出力信号VaとVbを変換して得られるパルス信号VapとVbpは、オフセットがない場合に比較して、図4の(b)で斜線で示す部分Sだけ早期に立下りパルスが発生してしまい、パルスを計数しても検出誤差が発生し、磁気抵抗素子の移動距離をλ/4の精度で知ることができなくなる。
【0037】
このオフセットの影響は、出力信号VaとVbの1周期λ(着磁ピッチλと同じ)毎にキャンセルされるが、λよりも細かい分解能で位置の検出を行う場合には大きな誤差要因となり、オフセットを補正する必要がある。
【0038】
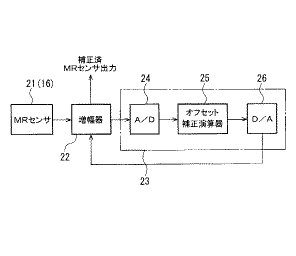
次に、上記したオフセットの補正方法について説明する。図5はオフセット補正器の構成を示すブロック図で、オフセット補正器23は、A/D変換器24、オフセット補正演算器25、D/A変換器26から構成される。オフセット補正器23は、この実施の形態ではマイクロカメラの制御を行う制御手段である図示されていない制御装置のCPUの内部に組み込まれる。図5に示すオフセット補正器23は、その制御装置のCPUで実行される機能を表しているが、ハードウエアで構成することもできることは言うまでもない。
【0039】
MRセンサ21の磁気抵抗素子16の出力信号は増幅器22で増幅された後、オフセット補正器23に入力され、A/D変換器24でデジタル信号に変換された後、オフセット補正演算器25でオフセット補正が行われる。補正演算された結果はD/A変換器26でアナログ信号に変換され、増幅器22にフィードバックされてオフセット補正が行われ、増幅器22からはオフセット補正のなされたMRセンサ21の出力信号が出力される。
【0040】
図6は、制御装置のCPUの内部で実行されるオフセット補正演算処理を説明するフローチャート、図7は図6のフローチャートでステップP12として説明した「端当り確認処理」の詳細を説明するフローチャート、図8は図6のフローチャートでステップP14として説明した「オフセット補正処理」の詳細を説明するフローチャートである。
【0041】
まず、図6のフローチャートによりオフセット補正演算処理を説明する。まずマイクロカメラの電源を投入して初期設定を行ない、D/A変換器26からMRセンサにオフセット補正処理の基準電圧である電圧Vcc/2を供給する(ステップP1)。圧電素子14に駆動パルスを供給して第2レンズ保持枠13を駆動して第2レンズL2 (フォーカシングレンズ)を移動し、撮影レンズ装置10の合焦位置が無限遠にある位置(以下、フォーカシングレンズの無限遠リセット位置、或いは単に、無限遠リセット位置という)に設定し、MRセンサ21の磁気抵抗素子16を、少くとも着磁ロッド15の着磁ピッチλの間隔以上の距離だけ移動させる(ステップP2)。
【0042】
MRセンサ21の出力信号が、既に検出され、メモリに記憶されている着磁ピッチλの1周期におけるセンサ出力最大値を越えているか否かを判定し(ステップP3)、MRセンサ21の出力信号が記憶されているセンサ出力最大値を越えているときは、メモリに記憶されているセンサ出力最大値をMRセンサ21出力信号最大値Vmax で更新する(ステップP4)。
【0043】
ステップP3の判定で、MRセンサ21の出力信号がメモリに記憶されているセンサ出力最大値を越えていない場合は、MRセンサ21の出力信号が、既に検出されメモリに記憶されている着磁ピッチλの1周期におけるセンサ出力最小値未満か否かを判定し(ステップP5)、センサ出力最小値未満のときは、メモリに記憶されているセンサ出力最小値をMRセンサ21出力信号最小値Vmin で更新する(ステップP6)。
【0044】
MRセンサ21の出力信号が、既に検出され、メモリに記憶されている着磁ピッチλの1/4周期におけるセンサ出力最大値を越えているか否かを判定し(ステップP7)、MRセンサ21の出力信号が記憶されているセンサ出力最大値を越えているときは、メモリに記憶されているセンサ出力最大値をMRセンサ21出力信号最大値Vmax で更新する(ステップP8)。
【0045】
ステップP7の判定で、MRセンサ21の出力信号がメモリに記憶されているセンサ出力最大値を越えていない場合は、MRセンサ21の出力信号が、既に検出されメモリに記憶されている着磁ピッチλの1/4周期におけるセンサ出力最小値未満か否かを判定し(ステップP9)、センサ出力最小値未満のときは、メモリに記憶されているセンサ出力最小値をMRセンサ21出力信号最小値Vmin で更新する(ステップP10)。
【0046】
着磁ピッチλの1/4周期分のMRセンサ21の出力信号の最大値Vmax と最大値Vmin とが得られたか否かを判定し(ステップP11)、得られたときは被駆動部材である第2レンズ保持枠13が鏡筒内部の可動範囲の端部に到達されていることを確認する「端当り確認処理」を行い(ステップP12)、ステップP13に移る。なお、「端当り確認処理」とは、例えば第2レンズ保持枠13を鏡筒内部の可動範囲の端部に到達させ、第2レンズL2 が初期位置(例えば無限遠リセット位置)に設定されたことを確認することを言う。
【0047】
ステップP11の判定で、1/4周期分の出力信号の最大値Vmax と最小値Vmin とが得られていないときは、着磁ピッチλの1周期分のMRセンサ21の出力信号の最大値Vmax と最小値Vmin とが得られたか否かを判定し(ステップP13)、得られたときは「オフセット補正処理」を行い(ステップP14)、ステップP3に移る。また、ステップP13判定で出力信号の最大値Vmax と最小値Vmin とが得られていないときは、ステップP3以下の処理を繰り返す。
【0048】
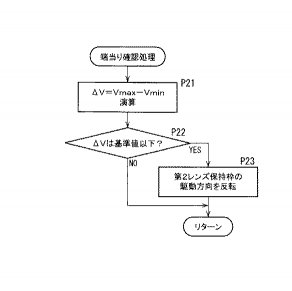
次に、図6のフローチャートでステップP12として説明した、「端当り確認処理」の詳細を、図7のフローチャートにより説明する。
【0049】
図6のフローチャートのステップP11までの処理で、着磁ピッチλの1/4周期分のMRセンサ21の出力信号の最大値Vmax と最小値Vmin とが得られていると判定されているから、最大値Vmax と最小値Vmin との差ΔVを演算し(ステップP21)、ΔV=(Vmax −Vmin )が基準値(零を含む許容値)以下か否かを判断する(ステップP22)。
【0050】
ΔVが基準値以下の場合は「端当り」であると確認し、被駆動部材である第2レンズ保持枠13の駆動方向を反転し(ステップP23)、主ルーチンに戻る。また、ステップP22の判定で、ΔVが基準値以下でない場合は「端当りではない」と判断し、直に主ルーチンに戻る。
【0051】
次に、図6のフローチャートでステップP14として説明した、「オフセット補正処理」の詳細を、図8のフローチャートにより説明する。
【0052】
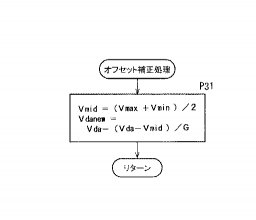
図6のフローチャートのステップP13までの処理で、着磁ピッチλの1周期分のMRセンサ21の出力信号の最大値Vmax と最小値Vmin とが得られていると判定されているから、以下の演算を行う(ステップP31)。
【0053】
Vmid =(Vmax +Vmin )/2
Vdanew =Vda−(Vda−Vmid )/G
但し、Vda:現在のD/A変換器26の出力電圧、
Vmid :MRセンサ21の出力信号の中心値(基準値)、
G:オフセット補正用の増幅器22のゲイン、
Vdanew :オフセット補正を行うためのD/A変換器26
の出力電圧。
【0054】
演算結果であるVdanew は、オフセット補正を行うためのD/A変換器26の出力電圧であり、MRセンサ21の出力信号を増幅する増幅器22(図5参照)にフィードバックされ、MRセンサ21の出力信号のオフセット補正がなされる。オフセット補正されたMRセンサ21の信号は、制御手段を構成する図示しない制御装置においてレンズ位置を示す信号として処理され、インパクト型駆動機構による第2レンズ保持枠13の駆動制御、即ち第2レンズL2 (フォーカシングレンズ)の位置の制御が行われる。
【0055】
図6のフローチャートで説明したように、オフセット補正処理はMRセンサ21の出力信号の中心値Vmid の値がMRセンサの電源電圧Vcc/2に近付き、位置検出誤差が零に限りなく近付くまで繰り返すことができるが、通常は着磁ピッチλの1周期分のデータの取得により補正することができる。更に、オフセット補正が適正に行われたことを確認するため、着磁ピッチλの1周期分のデータを追加取得し、合計着磁ピッチλの2周期分のデータの取得でオフセット補正処理は完了する。
【0056】
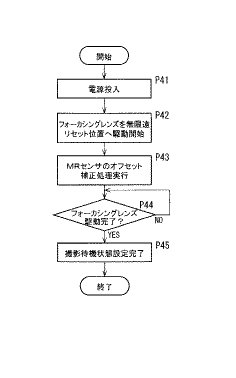
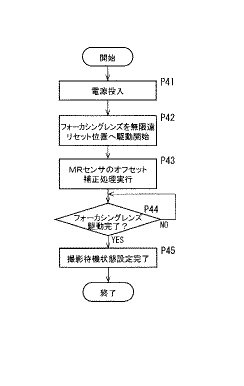
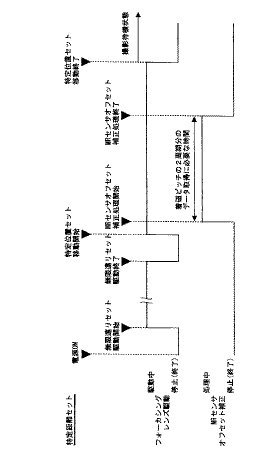
図9は、マイクロカメラの電源を投入した後、フォーカシングレンズを無限遠リセット位置へ設定する処理の完了までの期間内にオフセット補正処理を行い撮影待機状態に入る、第1の実施形態のカメラの初期化シーケンスを説明するフローチャートで、オフセット補正処理のための時間を短縮できる処理手順を示すものである。
【0057】
まず、マイクロカメラの電源を投入し(ステップP41)、レンズ駆動機構を作動させ、フォーカシングレンズを無限遠リセット位置、即ちフォーカシングレンズを検出基準位置に設定する駆動を開始する(ステップP42)。MRセンサの出力信号のオフセット補正処理を実行し(ステップP43)、フォーカシングレンズの無限遠リセット位置への駆動完了を待ち(ステップP44)、撮影待機状態の設定を完了する(ステップP45)。
【0058】
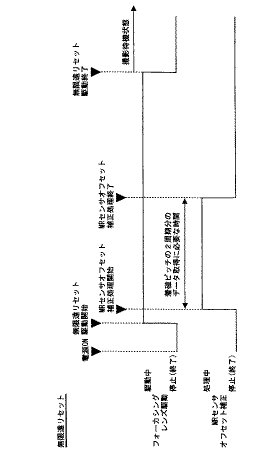
図10は、上記した第1の実施形態のカメラの初期化シーケンスのタイミングを説明するタイミングチャートである。マイクロカメラの電源を投入し、フォーカシングレンズの無限遠リセット位置への駆動を開始する。この直後、MRセンサの出力信号のオフセット補正処理を開始し、フォーカシングレンズの無限遠リセット位置への駆動終了前に、着磁ピッチλの2周期分のデータを取得してオフセット補正処理を終了する。
【0059】
この処理では、フォーカシングレンズの無限遠リセット位置への設定完了までの期間はAF制御系(自動焦点調節系)は作動しないので、この期間を利用してMRセンサの出力信号のオフセット補正処理を実行するものである。MRセンサの出力信号のオフセット補正処理は、前記したとおり着磁ロッドの着磁ピッチλの2周期分のデータが取得できれば十分であり、λは一般的には200μm程度であるから、着磁ピッチλの2周期分のデータを取得するときは、フォーカシングレンズを400μm程度移動させればデータ取得が完了することになる。
【0060】
仮に、フォーカシングレンズの現在の位置(リセット動作を開始する位置)から無限遠リセット位置までの距離が400μm以下であるとしても、リセット動作の開始からオフセット補正のための着磁ロッドの着磁ピッチλのデータの取得を開始すれば、それだけデータ取得時間を短縮することができる。
【0061】
一般的には、フォーカシングレンズの無限遠リセット位置への設定完了までの期間よりもオフセット補正処理完了までの期間の方が短いから、オフセット補正処理に特別に時間は必要とせず、マイクロカメラの電源の投入から撮影待機状態に至るまでの期間を短縮することができる。
【0062】
図11は、マイクロカメラの電源を投入した後、オフセット補正処理をして撮影待機状態に入る、第2の実施形態のカメラの初期化シーケンスを説明するフローチャートで、オフセット補正処理のための時間を短縮できる処理手順を示すものである。
【0063】
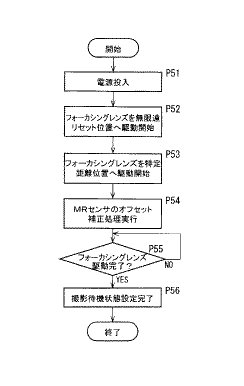
第2の実施形態では、電源投入直後にフォーカシングレンズを無限遠リセット位置、即ちフォーカシングレンズを検出基準位置に設定した後に、フォーカシングレンズを通常撮影を行う被写体距離である3〜5mの距離(特定距離という)に設定するが、この期間内にオフセット補正処理を実行し、処理時間を短縮するものである。
【0064】
まず、マイクロカメラの電源を投入し(ステップP51)、レンズ駆動機構を作動させ、フォーカシングレンズを無限遠リセット位置(検出基準位置)に設定する(ステップP52)。次に、フォーカシングレンズを移動して撮影レンズ装置の合焦位置を通常撮影を行う被写体距離である3〜5mの距離(以下、特定距離という)の位置に設定する駆動を開始する(ステップP53)。
【0065】
MRセンサの出力信号のオフセット補正処理を実行し(ステップP54)、フォーカシングレンズの合焦位置を特定距離位置へ設定する駆動の完了を待ち(ステップP55)、撮影待機状態の設定を完了する(ステップP56)。
【0066】
図12は、上記した第2の実施形態のカメラの初期化シーケンスのタイミングを説明するタイミングチャートである。マイクロカメラの電源を投入し、まず、フォーカシングレンズの無限遠リセット位置への駆動を開始し、無限遠リセット位置への駆動終了する。この後、フォーカシングレンズの特定距離位置へ駆動を開始し、この直後、MRセンサの出力信号のオフセット補正処理を開始し、フォーカシングレンズの特定距離位置へ駆動終了前に、着磁ピッチλの2周期分のデータを取得してオフセット補正処理を終了する。
【0067】
この処理では、フォーカシングレンズの合焦位置を無限遠リセット位置から特定距離へ移動して設定完了するまでの駆動期間は、AF制御系(自動焦点調節系)は作動しないので、この期間を利用してMRセンサの出力信号のオフセット補正処理を実行するものである。撮影レンズ装置の駆動期間内にMRセンサの出力信号のオフセット補正処理を実行するから「端当り」の危険性はなく、オフセット補正に必要な移動距離も確保できる。
【0068】
また、フォーカシングレンズの合焦位置を無限遠リセット位置から特定距離へ移動させるだけであるから、この期間にオフセット補正処理が終了しておらず数ミクロン単位の正確な位置の検出ができていなくとも、実用上支障はない。
【0069】
上記した第1及び第2の実施形態のように、マイクロカメラの電源を投入した後に実行されるフォーカシングレンズの移動期間にMRセンサの出力信号のオフセット補正処理を実行することで、オフセット補正処理のための特別な時間を必要とせず、処理時間を短縮することができる。
【0070】
以上、撮影レンズ装置を構成する第2レンズL2 (フォーカシングレンズ)を移動させて、無限遠リセット位置或いは特定距離に移動させる構成について、第2レンズL2 の位置検出装置とオフセット補正処理について説明した。
【0071】
しかし上記したレンズ位置検出装置とオフセット補正処理は、ズームレンズを構成するバリエータやコンペンセータの位置検出装置と、オフセット補正処理にも適用できることは言うまでもない。以下、マイクロカメラ(MZC)に使用されるズームレンズの構成と、ズームレンズのバリエータやコンペンセータの位置検出装置を説明する。
【0072】
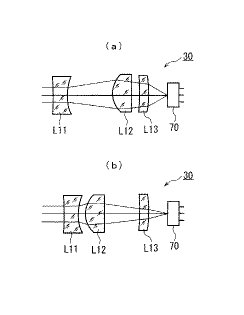
図13は、ズームレンズ30の光学系の構成の概略を説明する図であり、図13の(a)はズームレンズの焦点距離が広角端に設定されているときのズームレンズを構成するバリエータL11やコンペンセータL12の位置を示し、図13の(b)はズームレンズの焦点距離が望遠端に設定されているときのズームレンズを構成するバリエータL11やコンペンセータL12の位置を示している。
【0073】
ズーミング操作によりズームレンズを構成するバリエータL11やコンペンセータL12は、それぞれ独立に移動するように構成されている。なお、L13は収斂レンズ、70はズームレンズの結像位置に配置されたCCDを示す。
【0074】
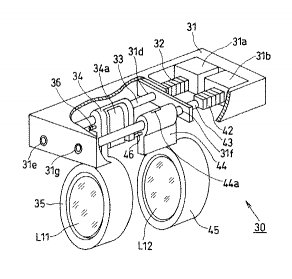
図14は、上記したズームレンズ30のバリエータL11やコンペンセータL12の駆動機構と、バリエータL11やコンペンセータL12の位置を検出するMRセンサの配置の一例を説明する一部を切欠いた斜視図である。
【0075】
図14において、31は図示しないレンズ鏡筒の一部の形成されたズームレンズ機構を組み立てるフレームで、フレーム31の内側の一方の端部にはブロック31aを介して圧電素子32の一端が接着固定され、圧電素子32の他端には駆動軸兼着磁ロッド33が接着固定される。駆動軸兼着磁ロッド33はフレーム31の内側の形成された受部31dとフレーム31の内側の他方の端部31eとの間に軸方向に移動可能に保持されている。
【0076】
バリエータL11を保持するレンズ保持枠35の一端には、摩擦接触部34とこれに対向する位置に接触部材34aが配置され、両者の間に駆動軸兼着磁ロッド33が挟持されて図示されていない圧接バネにより圧接され、レンズ保持枠35と駆動軸兼着磁ロッド33とは適当な摩擦力で摩擦結合される。
【0077】
また、フレーム31の内側の一方の端部にはブロック31bを介して圧電素子42の一端が接着固定され、圧電素子42の他端には駆動軸兼着磁ロッド43が接着固定される。駆動軸兼着磁ロッド43はフレーム31の内側の形成された受部31fとフレーム31の内側の他方の端部31gとの間に軸方向に移動可能に保持されている。
【0078】
コンペンセータL12を保持するレンズ保持枠45の一端には、摩擦接触部44とこれに対向する位置に接触部材44aが配置され、両者の間に駆動軸兼着磁ロッド43が挟持されて図示されていない圧接バネにより圧接され、レンズ保持枠45と駆動軸兼着磁ロッド43とは適当な摩擦力で摩擦結合される。
【0079】
なお、レンズ保持枠35とレンズ保持枠45とは、それぞれが保持するバリエータL11とコンペンセータL12の光軸が同軸になるように、配置されているものとする。また、レンズ保持枠35やレンズ保持枠45が移動するとき、光軸方向に沿って正確に移動するように、適当な案内軸などを設けるとよい。
【0080】
上記した圧電素子32、駆動軸兼着磁ロッド33、摩擦接触部34と接触部材34aから構成される駆動機構、及び圧電素子42、駆動軸兼着磁ロッド43、摩擦接触部44と接触部材44aから構成される駆動機構は、先に図1で説明したインパクト型駆動機構と同様な駆動機構であり、その動作も同様であるから詳細な説明は省略する。
【0081】
レンズ保持枠35の摩擦接触部34には、磁気抵抗素子36が駆動軸兼着磁ロッド33に接近して設けられてMRセンサが構成されており、磁気抵抗素子36の出力信号からバリエータL11の位置を検出することができる。また、レンズ保持枠45の摩擦接触部44には、磁気抵抗素子46が駆動軸兼着磁ロッド43に接近して設けられてMRセンサが構成されており、磁気抵抗素子46の出力信号からコンペンセータL12の位置を検出することができる。
【0082】
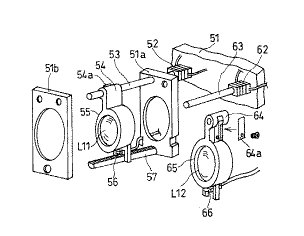
図15も、上記したズームレンズ30のバリエータL11やコンペンセータL12の駆動機構と、バリエータL11やコンペンセータL12の位置を検出するMRセンサの配置の他の例を説明する一部を分解した斜視図である。
【0083】
図15において、レンズ鏡筒の一部に形成されたフレーム51にズームレンズ機構が組み立てられている。フレーム51には圧電素子52の一端が接着固定され、圧電素子52の他端には駆動軸53が接着固定される。駆動軸53はフレーム51から延長された支持部51aと支持部51bとにより軸方向に移動可能に保持されている。
【0084】
バリエータL11を保持するレンズ保持枠55の一端には、摩擦接触部54と圧接バネ54aが配置され、両者の間に駆動軸53が挟持され、圧接バネ54aの圧接力によりレンズ保持枠55と駆動軸53とは適当な摩擦力で摩擦結合されている。
【0085】
フレーム51の支持部51aには、レンズ保持枠55の移動方向に沿って延長された着磁ロッド57が設けられており、バリエータL11を保持するレンズ保持枠55の摩擦接触部54と反対側には磁気抵抗素子56が着磁ロッド57に接近して設けられてMRセンサが構成されている。この構成により磁気抵抗素子56の出力信号からバリエータL11の位置を検出できる。
【0086】
また、フレーム51には圧電素子62の一端が接着固定され、圧電素子62の他端には駆動軸63が接着固定される。駆動軸63はフレーム51から延長された支持部51aと支持部51bとにより軸方向に移動可能に保持されている。
【0087】
コンペンセータL12を保持するレンズ保持枠65の一端には、摩擦接触部64と圧接バネ64aが設けられ、両者の間に駆動軸63が挟持され、圧接バネ64aの圧接力によりレンズ保持枠65と駆動軸63とは適当な摩擦力で摩擦結合されている。
【0088】
コンペンセータL12を保持するレンズ保持枠65の摩擦接触部64と反対側には、磁気抵抗素子66が着磁ロッド57に接近して設けられてMRセンサが構成されている。この構成により、磁気抵抗素子66の出力信号からコンペンセータL12の位置を検出することができる。
【0089】
着磁ロッド57はバリエータL11の検出とコンペンセータL12の検出に共用されており、構成を簡単にすることができる。
【0090】
なお、レンズ保持枠55とレンズ保持枠65とは、それぞれが保持するバリエータL11とコンペンセータL12の光軸が同軸になるように、配置されているものとする。
【0091】
このようなズームレンズでは、焦点距離が広角端に設定されているときの各レンズ群の位置を初期位置とし、電源投入により各レンズ群が初期位置に移動する。即ち、例えば、各レンズ群の焦点距離が広角端と望遠端の間にある状態で、電源が投入されたときは、初期設定のために各レンズ群は焦点距離が広角端になるように移動を開始するから、この各レンズ群の移動期間にオフセット補正処理を行うことで、オフセット補正処理のための特別な初期化時間を必要とせず、処理時間を短縮することができる。
【0092】
以上説明したレンズの位置の検出には、着磁ロッドと磁気抵抗素子から構成されるMRセンサを使用したが、MRセンサに代えて、以下説明する光学スケールを使用した光学センサを使用することもできる。
【0093】
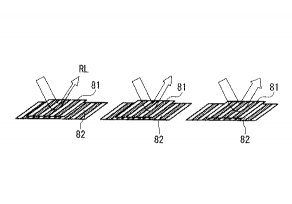
まず、図16を参照して光学スケールによる位置の検出原理を説明する。所定のピッチλで白黒パターンの縞模様を形成した光学スケールである第1スケール81と第2スケール82を縞模様の方向を揃えて密着する。縞模様に向けて光を投射し、その反射光RLを検出すると、白黒パターンの縞模様即ち、ピッチλで形成された縞模様の重なり状態に応じて反射光量が変化する。
【0094】
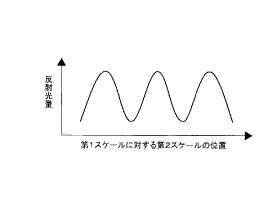
第1スケール81に対して第2スケール82を相対移動させると、第1スケール81に対する第2スケール82の相対位置と反射光量は、図17に示すように第1スケール81に対する第2スケール82の位置、即ち、第1スケール81に対する第2スケール82の重なり状態に応じて正弦波状に変化するから、反射光量の変化量を解析、例えば反射光量のピークの数を計数する等の方法により、光学スケールのピッチλに等しい分解能で第1スケール81に対する第2スケール82の移動距離の検出を行うことができる。
【0095】
例えば、第1スケール81をレンズ鏡筒側に配置し、第2スケール82をレンズ保持枠側に配置する。そして、レンズ保持枠が移動して第1スケール81に対して第2スケール82が移動するときの反射光量のピークの数を計数することでレンズ保持枠、即ちレンズの移動距離を検出することができる。
【0096】
なお、上記したこの発明の実施の形態は、マイクロカメラの撮影レンズ装置に適用した例で説明したが、この発明は、普通のオートフォーカスカメラ用の撮影レンズ装置の光学エレメントの位置の検出にも適用できることは言うまでもない。特にレンズ交換形式の撮影レンズ装置では、カメラの電源投入時のほか、レンズ交換を行ったときにオフセットを補正する補正処理を実行するとよい。
【0097】
また、上記したこの発明の実施の形態は、撮像装置、即ちカメラとして説明したが、この発明の実施の形態の撮像装置は全体を極めて小型に構成することができるので、種々の携帯機器、例えば携帯電話、携帯情報端末装置などに装備することができる。なお、この発明の実施の形態の撮像装置を装備する携帯電話、携帯情報端末装置などは、それ自体は公知の構成であるから、ここでは詳細な説明は省略する。
【0098】
そして、この発明の実施の形態の撮像装置を装備した携帯機器では、携帯機器の電源の投入から待機状態に入るまでの時間が短く、焦点が良く合った画像を撮影することができるから、撮影を意図したときすぐに焦点が良く合った高品質の画像を撮影して所望の相手に送信することが可能となる。
【0099】
この発明の実施の形態には、以下の構成を備える発明が含まれる。
【0100】
(1)請求項1において、位置検出手段の出力信号の外的要因に基づく変動の補正処理は、前記位置検出手段から出力される出力信号の、所定の基準値からのずれを補正するオフセット補正処理であることを特徴とする請求項1記載の撮像装置。
【0101】
(2)請求項1において、位置検出手段の出力信号の外的要因に基づく変動の補正処理は、位置検出手段の出力信号の最大値と最小値を検出し、その最大値と最小値との中心値と、所定の基準値との差を許容範囲以下になるように補正するオフセット補正処理であることを特徴とする請求項1記載の撮像装置。
【0102】
(3)請求項1において、位置検出手段は、磁気抵抗素子と、該磁気抵抗素子に接近して配置された一定間隔で着磁された着磁ロッドとから構成され、前記光学エレメントの移動に伴う磁気抵抗素子と着磁ロッドとの相対移動により磁気抵抗素子から出力される出力信号の変化により光学エレメントの移動距離を検出することを特徴とする請求項1記載の撮像装置。
【0103】
(4)請求項1において、位置検出手段は、前記光学エレメント保持枠に固定された磁気抵抗素子と、該磁気抵抗素子に接近して配置された一定間隔で着磁された着磁ロッドとから構成され、前記光学エレメントの移動に伴う磁気抵抗素子と着磁ロッドとの相対移動により磁気抵抗素子から出力される出力信号の変化により光学エレメントの移動距離を検出することを特徴とする請求項1記載の撮像装置。
【0104】
(5)請求項1において、位置検出手段は、所定間隔で形成された縞模様を有する光学スケールと、光学スケールを読み取る光センサーとから構成され、前記光学エレメントと共に移動する光学スケールの移動に伴う前記光センサーの出力信号の変化により光学エレメントの移動距離を検出することを特徴とする請求項1記載の撮像装置。
【0105】
(6)請求項1において、位置検出手段は、前記光学エレメント保持枠に固定された一定間隔で形成された縞模様を有する第1の光学スケールと、該第1の光学スケールに接近して固定配置された一定間隔で形成された縞模様を有する第2の光学スケールと、前記第1及び第2の光学スケールを読み取る光センサーとから構成され、前記光学エレメントの移動に伴う前記第1の光学スケールと第2の光学スケールとの相対移動に伴う前記光センサーの出力信号の変化により光学エレメントの移動距離を検出することを特徴とする請求項1記載の撮像装置。
【0106】
【発明の効果】
以上説明したとおり、請求項1の発明では、カメラの電源を投入して起動したとき、撮影レンズ装置を構成する光学エレメントの位置を検出する位置検出装置から出力される出力信号の外的要因に基づく変動(オフセット)を補正する補正処理を実行するが、この出力信号の補正処理(オフセット補正処理)を、光学エレメントの駆動を開始させると同時に実行するように構成した。
【0107】
この構成により、光学エレメントが所定の初期位置に移動する期間内に位置検出装置からの出力信号の外的要因に基づく変動の補正処理が実行され、補正処理のための特別な時間を必要としないから、カメラの電源の投入から待機状態に入るまでの時間を短縮することができると共に、カメラの電源投入の都度、位置検出装置からの出力信号の補正処理(オフセット補正処理)が必ず実行されるから、常に光学エレメントの位置の検出を高精度で安定して実行することができ、カメラの電源の投入から待機状態に入るまでの時間が短く、焦点が良く合った画像を撮影できる撮像装置を提供することができる。
【0108】
また、請求項5の発明は、請求項1記載の発明に係る撮像装置を備えた携帯機器であるから、携帯機器の電源の投入から待機状態に入るまでの時間が短く、焦点が良く合った画像を撮影できる撮像装置を備えた携帯機器を提供することができる。
【図面の簡単な説明】
【図1】マイクロカメラの撮影レンズの構成を説明する断面図。
【図2】MRセンサを構成する着磁ロッドの磁極間隔と磁気抵抗素子との配置と出力信号を説明する図。
【図3】磁気抵抗素子の等価回路を示す図。
【図4】磁気抵抗素子の出力信号のオフセットが位置検出に与える影響を説明する図。
【図5】オフセット補正回路の構成を示すブロック図。
【図6】オフセット補正演算処理を説明するフローチャート。
【図7】端当り確認処理の詳細を説明するフローチャート。
【図8】オフセット処理の詳細を説明するフローチャート。
【図9】第1の実施形態のカメラの初期化シーケンスを説明するフローチャート。
【図10】第1の実施形態のカメラの初期化シーケンスのタイミングを説明するタイミングチャート。
【図11】第2の実施形態のカメラの初期化シーケンスを説明するフローチャート。
【図12】第2の実施形態のカメラの初期化シーケンスのタイミングを説明するタイミングチャート。
【図13】ズームレンズの光学系の構成の概略を説明する図。
【図14】ズームレンズのバリエータやコンペンセータの駆動機構と、その位置を検出するMRセンサの配置の一例を説明する一部を切欠いた斜視図。
【図15】ズームレンズのバリエータやコンペンセータの駆動機構と、その位置を検出するMRセンサの配置の他の例を説明する一部を分解した斜視図。
【図16】光学スケールによる位置の検出原理を説明する図。
【図17】第1及び第2の光学スケールの相対位置と反射光量の変化を説明する図。
【符号の説明】
10 撮影レンズ装置
11 レンズ鏡筒
11a 第3レンズ保持枠
12 第1レンズ保持枠
13 第2レンズ保持枠
13a 摩擦接触部
13b 接触部材
13c 圧接バネ
13d 摺動部
14 圧電素子
15 駆動軸兼着磁ロッド
16 磁気抵抗素子
19 案内軸
21 MRセンサ
22 増幅器
23 オフセット補正器
24 A/D変換器
25 オフセット補正演算器
26 D/A変換器
30 ズームレンズ
31 フレーム
32、42 圧電素子
33、43 駆動軸兼着磁ロッド
34、44 摩擦接触部
34a、44a 接触部材
35、45 レンズ保持枠
36、46 磁気抵抗素子
51 フレーム
51a、51b 支持部
52、62 圧電素子
53、63 駆動軸
54、64 摩擦接触部
54a、64a 圧接バネ
55、65 レンズ保持枠
56、66 磁気抵抗素子
57 着磁ロッド
70 CCD
81 第1スケール
82 第2スケール
L1 第1レンズ
L2 第2レンズ
L3 第3レンズ
L11 バリエータ
L12 コンペンセータ
L13 収斂レンズ
【0001】
【発明の属する技術分野】
この発明は撮像装置、及びその撮像装置が組み込まれた携帯電話等の携帯機器に関する。
【0002】
【従来の技術】
従来の撮像装置、即ちカメラの撮影レンズ装置は、複数の光学エレメントが鏡筒内に配置されており、光学エレメントの一部は駆動機構により光軸方向に移動可能に構成され、ズーミングやフォーカシングが行われる。移動可能な光学エレメントの位置の検出は、撮影レンズ装置のズーミングやフォーカシングを行う上で不可欠なもので、精度の高い位置検出が求められている。
【0003】
このため、位置検出装置としては、磁気抵抗素子と着磁スケールとから構成されるMRセンサを使用するものがある。例えば、固定部となる鏡筒側に磁気抵抗素子を設け、移動側の光学エレメントの保持枠に着磁スケールを設けたものがある(例えば特許文献1参照)。
【0004】
【特許文献1】
特開2000−356733号公報(第2頁第2欄)。
【0005】
このような構成では、MRセンサを構成する磁気抵抗素子及び着磁スケールをそれぞれ鏡筒及び光学エレメントの保持枠の所定の位置に正確に取付ける必要があるため、取付位置を微調整する機械的な調整機構が設けられており、製造行程において、個々のMRセンサの出力を見ながら磁気抵抗素子及び着磁スケールの取付位置の微調整を行っていた。
【0006】
また、MRセンサは、日中と夜間或いは夏と冬などの環境温度の変化や経年変化により磁気抵抗素子の出力が変化し、検出精度が低下してしまう場合がある。このため、高精度の検出結果を必要とする機器では、必要に応じて何時でも磁気抵抗素子及び着磁スケールの取付位置を調整し、環境温度の変化や経年変化による磁気抵抗素子の出力変動を抑えることが求められている。
【0007】
しかしながら、上記した撮像装置で説明すれば、光学エレメントの位置を検出する磁気抵抗素子及び着磁スケールの取付位置の微調整は製造行程において実施されるだけで、光学エレメントが撮像装置に組み込まれた後は磁気抵抗素子及び着磁スケールの取付位置の微調整は実際上殆ど不可能であったため、光学エレメントの位置を高精度に検出できないという不都合があった。
【0008】
これ等の課題への対策として、上記特許文献1には、磁気抵抗素子及び着磁スケールの取付位置のずれに基づく出力変動や、環境温度の変化や経年変化による磁気抵抗素子の出力変動が生じても、ゲインやオフセット量を調整することで磁気抵抗素子の出力を一定にし、光学エレメントの位置を高精度に検出するようにする構成が提案されている。
【0009】
【発明が解決しようとする課題】
しかしながら、上記した磁気抵抗素子のゲインやオフセット量を調整して出力を一定にする構成には、ゲインやオフセット量の調整手段は開示されているが、調整に要する時間を短縮する技術や、調整を行うタイミングまでは開示されていない。この発明は上記課題を解決し、ゲインやオフセット量の調整を行うタイミングを適正に制御することにより、調整時間を最小限に短縮して撮像装置の電源の投入から待機状態に入るまでの立上げ時間を最短にすると共に、検出対象である光学エレメントの位置の検出性能を高めることを目的とする。
【0010】
【課題を解決するための手段】
この発明は上記課題を解決するもので、請求項1の発明は、複数の光学エレメントで構成された撮影用レンズと、前記光学エレメントを駆動する駆動手段と、前記駆動手段により駆動される前記光学エレメントの位置を検出する位置検出手段と、前記駆動手段及び位置検出手段を制御する制御手段とを備えた撮像装置において、前記制御手段は、撮像装置の撮像機能が起動されたときは、光学エレメントの駆動を開始させると同時に位置検出手段の出力信号の外的要因に基づく変動の補正処理を実行することを特徴とする撮像装置である。
【0011】
そして、前記撮像装置の撮像機能の起動とは、撮像装置の電源投入による撮像機能の起動である。
【0012】
そして、前記位置検出手段の出力信号の外的要因に基づく変動の補正処理とは、位置検出手段の取付誤差、環境温度の変化、位置検出手段の経年変化を含む外的要因に基づく出力信号の変動の補正処理である。
【0013】
そして、前記光学エレメントには、少くともズームレンズを構成するバリエータ、コンペンセータ、フォーカスレンズのいずれかが含まれる。
【0014】
請求項5の発明は、前記請求項1乃至4のいずれかに記載する撮像装置が組み込まれていることを特徴とする携帯機器である。
【0015】
【発明の実施の形態】
以下、この発明の実施の形態を説明する。図1は、この発明の実施の形態の撮像装置であるマイクロカメラ(MZC)の、撮影レンズ装置10の構成の概略を説明する断面図である。なお、マイクロカメラ(MZC)は、最近の携帯機器、例えば携帯電話に装備されているような極めて小型のカメラのことを指す。
【0016】
図1において、11は撮影レンズ装置10のレンズ鏡筒、12は第1レンズ保持枠で、第1レンズ保持枠12はレンズ鏡筒11の光軸方向の一方の端部に固定されており、レンズ鏡筒11の光軸方向の他方の端部付近には第3レンズ保持枠11aが形成されている。さらに、レンズ鏡筒11の内部には、移動可能に配置された第2レンズ保持枠13が配置されている。
【0017】
光学エレメントである第1レンズL1 は第1レンズ保持枠12に保持され、光学エレメントである第2レンズL2 は第2レンズ保持枠13に保持され、同じく光学エレメントである第3レンズL3 はレンズ鏡筒11に形成された第3レンズ保持枠11aに保持されており、第1レンズL1 乃至第3レンズL3 はそれぞれ光軸に対して同軸に配置されている。
【0018】
そして、駆動手段を構成するインパクト型駆動機構により、第2レンズ保持枠13を介して第2レンズL2 を光軸方向に移動させることで撮影レンズ装置10の焦点合わせを行うことができる。以下の説明では、第2レンズL2 をフォーカシングレンズということがある。なお、インパクト型駆動機構については、後で説明する。
【0019】
レンズ鏡筒11には、第2レンズL2 を駆動する圧電素子14の一端が接着固定され、圧電素子14の他端には駆動軸兼着磁ロッド15が接着固定される。駆動軸兼着磁ロッド15はレンズ鏡筒11と第1レンズ保持枠12との間に軸方向に移動可能に保持されており、この他、レンズ鏡筒11と第1レンズ保持枠12との間には案内軸19が固定配置されている。
【0020】
第2レンズ保持枠13の下側には、摩擦接触部13aとこれに対向する位置に接触部材13bが配置され、両者の間に駆動軸兼着磁ロッド15が挟持されて圧接バネ13cにより圧接され、第2レンズ保持枠13と駆動軸兼着磁ロッド15とは適当な摩擦力で摩擦結合される。
【0021】
第2レンズ保持枠13の上側には、二股状の摺動部13dが形成され、摺動部13dは案内軸19に対し軸方向に移動可能に緩みなく係合する。
【0022】
レンズ駆動機構について簡単に説明する。ここではレンズ駆動機構は圧電素子を使用した公知のインパクト型駆動機構を使用し、第2レンズ保持枠13、即ち第2レンズL2 を矢印a方向及び矢印aと反対方向に移動させることができるものである。インパクト型駆動機構は、前記した圧電素子14と駆動軸兼着磁ロッド15、及び第2レンズ保持枠13の下側に配置され、駆動軸兼着磁ロッド15を挟持して適当な摩擦力で摩擦結合する摩擦接触部13aと接触部材13b及び圧接バネ13cから構成される。
【0023】
図示しない駆動パルス発振器から出力される鋸歯状波形の駆動パルスを圧電素子14に供給する。駆動パルスの緩やかな立上り部分では圧電素子14は緩やかに厚み方向に伸び、駆動軸兼着磁ロッド15を矢印a方向に移動させるから、駆動軸兼着磁ロッド15に摩擦結合している第2レンズ保持枠13も矢印a方向に移動する。
【0024】
駆動パルスの急速な立下り部分では圧電素子14は急速に厚み方向に縮み、駆動軸兼着磁ロッド15を矢印aと反対方向に移動させるが、駆動軸兼着磁ロッド15に摩擦結合している第2レンズ保持枠13は、その慣性力が摩擦結合力に打ち勝ち、その位置に留まる。
【0025】
圧電素子14に駆動パルスを連続的に供給して速度の異なる厚み方向振動を発生させることにより、第2レンズ保持枠13は次第に矢印a方向に移動する。このとき、摺動部13dが案内軸19に対して係合しているので、第2レンズ保持枠13は光軸方向に沿って正確に移動する。第2レンズ保持枠13を矢印aと反対方向に移動させるには、急速な立上り部分と緩やかな立下り部分からなる鋸歯状波形の駆動パルスを使用すればよい。
【0026】
第2レンズ保持枠13には、第2レンズL2 (フォーカシングレンズ)の位置を検出するための磁気抵抗素子16が駆動軸兼着磁ロッド15に接近して設けられており、磁気抵抗素子16の出力信号から第2レンズL2 (フォーカシングレンズ)の位置を検出することができる。
【0027】
磁気抵抗素子と着磁ロッドから構成されるMRセンサについて説明する。MRセンサは無接触式の位置センサで、センサは小型化が容易であるから小型光学系の可動レンズの位置の検出に適した位置センサである。
【0028】
図2は、MRセンサを構成する着磁ロッドの、磁極間隔と磁気抵抗素子との配置及びその出力信号を説明する図で、図3は磁気抵抗素子の等価回路である。磁気抵抗素子はグループaの1対の素子MRa1 とMRa2 、及びグループbの1対の磁気抵抗素子MRb1 とMRb2 とが電源VccとGNDとの間に並列に接続され、グループaの磁気抵抗素子MRa1 とMRa2 との分圧点の電位Vaと、グループbの素子MRb1 とMRb2 との分圧点の電位Vbとが磁気抵抗素子の出力として利用される。
【0029】
図2の(a)は着磁ロッドの磁界の変化を示し、図2の(b)は着磁ロッドの着磁配列を示すもので、磁極NとSは一定の間隔λ(以下、着磁ピッチλという)で配列されている。図2の(c)は磁気抵抗素子の配置を示すもので、λ/2の間隔を隔てて配置されたグループaの素子MRa1 とMRa2 と、グループbの磁気抵抗素子MRb1 とMRb2 とが、λ/4の間隔を隔てて配置される。
【0030】
図2の(d)は磁気抵抗素子の出力信号を示すもので、グループaの磁気抵抗素子MRa1 とMRa2 とグループbの磁気抵抗素子MRb1 とMRb2 とがλ/4離れているから、グループaの磁気抵抗素子の出力信号Vaとグループbの磁気抵抗素子の出力信号Vbとは、位相がλ/4ずれた正弦波信号となる。
【0031】
図2の(e)はグループaの磁気抵抗素子の出力信号Vaをパルス信号変換回路で変換したパルス信号、図2の(f)はグループbの磁気抵抗素子の出力信号Vbをパルス信号変換回路で変換したパルス信号であり、これらのパルス信号の立上りパルス及び立下りパルスを計数することにより、磁気抵抗素子の移動距離をλ/4の精度で知ることができる。
【0032】
オフセットについて説明する。ここで言うオフセットとは、磁気抵抗素子の出力信号の中心電圧を変動させる電圧成分を指すものである。磁気抵抗素子は、磁気抵抗素子固有の特性のばらつきや磁気抵抗素子の温度変化特性等により、出力信号の中心電圧が変動(オフセット)する。以下、図4を参照してオフセットの発生が位置の検出に与える影響を説明する。
【0033】
図4の(a)はオフセットがない場合を説明する図である。グループaの磁気抵抗素子の出力信号Va及びグループbの磁気抵抗素子の出力信号Vbの中心電圧が理想的な状態のとき、これらの出力信号VaとVbは図4の(a)に示すように、パルス変換のための比較レベル電圧Vcompに対して正(+)側及び負(−)側にずれることなく、即ちオフセットなしに変化する。
【0034】
出力信号VaとVbを変換して得られるパルス信号VapとVbpの立上りパルス及び立下りパルスは、図4の(a)に示すように着磁ロッドの着磁ピッチλの1/4の周期で変化するから、パルスを計数することで磁気抵抗素子の移動距離をλ/4の精度で知ることができる。
【0035】
図4の(b)はオフセットがある場合を説明する図である。図示した例は、磁気抵抗素子の出力信号VaとVbの中心電圧が、パルス変換のための比較レベル電圧Vcompに対して負(−)側にずれ、即ち負(−)側にオフセットされた例である。
【0036】
この場合は、出力信号VaとVbは、共に比較レベル電圧Vcompよりも高い電圧領域が減少し低い電圧領域が増加するから、出力信号VaとVbを変換して得られるパルス信号VapとVbpは、オフセットがない場合に比較して、図4の(b)で斜線で示す部分Sだけ早期に立下りパルスが発生してしまい、パルスを計数しても検出誤差が発生し、磁気抵抗素子の移動距離をλ/4の精度で知ることができなくなる。
【0037】
このオフセットの影響は、出力信号VaとVbの1周期λ(着磁ピッチλと同じ)毎にキャンセルされるが、λよりも細かい分解能で位置の検出を行う場合には大きな誤差要因となり、オフセットを補正する必要がある。
【0038】
次に、上記したオフセットの補正方法について説明する。図5はオフセット補正器の構成を示すブロック図で、オフセット補正器23は、A/D変換器24、オフセット補正演算器25、D/A変換器26から構成される。オフセット補正器23は、この実施の形態ではマイクロカメラの制御を行う制御手段である図示されていない制御装置のCPUの内部に組み込まれる。図5に示すオフセット補正器23は、その制御装置のCPUで実行される機能を表しているが、ハードウエアで構成することもできることは言うまでもない。
【0039】
MRセンサ21の磁気抵抗素子16の出力信号は増幅器22で増幅された後、オフセット補正器23に入力され、A/D変換器24でデジタル信号に変換された後、オフセット補正演算器25でオフセット補正が行われる。補正演算された結果はD/A変換器26でアナログ信号に変換され、増幅器22にフィードバックされてオフセット補正が行われ、増幅器22からはオフセット補正のなされたMRセンサ21の出力信号が出力される。
【0040】
図6は、制御装置のCPUの内部で実行されるオフセット補正演算処理を説明するフローチャート、図7は図6のフローチャートでステップP12として説明した「端当り確認処理」の詳細を説明するフローチャート、図8は図6のフローチャートでステップP14として説明した「オフセット補正処理」の詳細を説明するフローチャートである。
【0041】
まず、図6のフローチャートによりオフセット補正演算処理を説明する。まずマイクロカメラの電源を投入して初期設定を行ない、D/A変換器26からMRセンサにオフセット補正処理の基準電圧である電圧Vcc/2を供給する(ステップP1)。圧電素子14に駆動パルスを供給して第2レンズ保持枠13を駆動して第2レンズL2 (フォーカシングレンズ)を移動し、撮影レンズ装置10の合焦位置が無限遠にある位置(以下、フォーカシングレンズの無限遠リセット位置、或いは単に、無限遠リセット位置という)に設定し、MRセンサ21の磁気抵抗素子16を、少くとも着磁ロッド15の着磁ピッチλの間隔以上の距離だけ移動させる(ステップP2)。
【0042】
MRセンサ21の出力信号が、既に検出され、メモリに記憶されている着磁ピッチλの1周期におけるセンサ出力最大値を越えているか否かを判定し(ステップP3)、MRセンサ21の出力信号が記憶されているセンサ出力最大値を越えているときは、メモリに記憶されているセンサ出力最大値をMRセンサ21出力信号最大値Vmax で更新する(ステップP4)。
【0043】
ステップP3の判定で、MRセンサ21の出力信号がメモリに記憶されているセンサ出力最大値を越えていない場合は、MRセンサ21の出力信号が、既に検出されメモリに記憶されている着磁ピッチλの1周期におけるセンサ出力最小値未満か否かを判定し(ステップP5)、センサ出力最小値未満のときは、メモリに記憶されているセンサ出力最小値をMRセンサ21出力信号最小値Vmin で更新する(ステップP6)。
【0044】
MRセンサ21の出力信号が、既に検出され、メモリに記憶されている着磁ピッチλの1/4周期におけるセンサ出力最大値を越えているか否かを判定し(ステップP7)、MRセンサ21の出力信号が記憶されているセンサ出力最大値を越えているときは、メモリに記憶されているセンサ出力最大値をMRセンサ21出力信号最大値Vmax で更新する(ステップP8)。
【0045】
ステップP7の判定で、MRセンサ21の出力信号がメモリに記憶されているセンサ出力最大値を越えていない場合は、MRセンサ21の出力信号が、既に検出されメモリに記憶されている着磁ピッチλの1/4周期におけるセンサ出力最小値未満か否かを判定し(ステップP9)、センサ出力最小値未満のときは、メモリに記憶されているセンサ出力最小値をMRセンサ21出力信号最小値Vmin で更新する(ステップP10)。
【0046】
着磁ピッチλの1/4周期分のMRセンサ21の出力信号の最大値Vmax と最大値Vmin とが得られたか否かを判定し(ステップP11)、得られたときは被駆動部材である第2レンズ保持枠13が鏡筒内部の可動範囲の端部に到達されていることを確認する「端当り確認処理」を行い(ステップP12)、ステップP13に移る。なお、「端当り確認処理」とは、例えば第2レンズ保持枠13を鏡筒内部の可動範囲の端部に到達させ、第2レンズL2 が初期位置(例えば無限遠リセット位置)に設定されたことを確認することを言う。
【0047】
ステップP11の判定で、1/4周期分の出力信号の最大値Vmax と最小値Vmin とが得られていないときは、着磁ピッチλの1周期分のMRセンサ21の出力信号の最大値Vmax と最小値Vmin とが得られたか否かを判定し(ステップP13)、得られたときは「オフセット補正処理」を行い(ステップP14)、ステップP3に移る。また、ステップP13判定で出力信号の最大値Vmax と最小値Vmin とが得られていないときは、ステップP3以下の処理を繰り返す。
【0048】
次に、図6のフローチャートでステップP12として説明した、「端当り確認処理」の詳細を、図7のフローチャートにより説明する。
【0049】
図6のフローチャートのステップP11までの処理で、着磁ピッチλの1/4周期分のMRセンサ21の出力信号の最大値Vmax と最小値Vmin とが得られていると判定されているから、最大値Vmax と最小値Vmin との差ΔVを演算し(ステップP21)、ΔV=(Vmax −Vmin )が基準値(零を含む許容値)以下か否かを判断する(ステップP22)。
【0050】
ΔVが基準値以下の場合は「端当り」であると確認し、被駆動部材である第2レンズ保持枠13の駆動方向を反転し(ステップP23)、主ルーチンに戻る。また、ステップP22の判定で、ΔVが基準値以下でない場合は「端当りではない」と判断し、直に主ルーチンに戻る。
【0051】
次に、図6のフローチャートでステップP14として説明した、「オフセット補正処理」の詳細を、図8のフローチャートにより説明する。
【0052】
図6のフローチャートのステップP13までの処理で、着磁ピッチλの1周期分のMRセンサ21の出力信号の最大値Vmax と最小値Vmin とが得られていると判定されているから、以下の演算を行う(ステップP31)。
【0053】
Vmid =(Vmax +Vmin )/2
Vdanew =Vda−(Vda−Vmid )/G
但し、Vda:現在のD/A変換器26の出力電圧、
Vmid :MRセンサ21の出力信号の中心値(基準値)、
G:オフセット補正用の増幅器22のゲイン、
Vdanew :オフセット補正を行うためのD/A変換器26
の出力電圧。
【0054】
演算結果であるVdanew は、オフセット補正を行うためのD/A変換器26の出力電圧であり、MRセンサ21の出力信号を増幅する増幅器22(図5参照)にフィードバックされ、MRセンサ21の出力信号のオフセット補正がなされる。オフセット補正されたMRセンサ21の信号は、制御手段を構成する図示しない制御装置においてレンズ位置を示す信号として処理され、インパクト型駆動機構による第2レンズ保持枠13の駆動制御、即ち第2レンズL2 (フォーカシングレンズ)の位置の制御が行われる。
【0055】
図6のフローチャートで説明したように、オフセット補正処理はMRセンサ21の出力信号の中心値Vmid の値がMRセンサの電源電圧Vcc/2に近付き、位置検出誤差が零に限りなく近付くまで繰り返すことができるが、通常は着磁ピッチλの1周期分のデータの取得により補正することができる。更に、オフセット補正が適正に行われたことを確認するため、着磁ピッチλの1周期分のデータを追加取得し、合計着磁ピッチλの2周期分のデータの取得でオフセット補正処理は完了する。
【0056】
図9は、マイクロカメラの電源を投入した後、フォーカシングレンズを無限遠リセット位置へ設定する処理の完了までの期間内にオフセット補正処理を行い撮影待機状態に入る、第1の実施形態のカメラの初期化シーケンスを説明するフローチャートで、オフセット補正処理のための時間を短縮できる処理手順を示すものである。
【0057】
まず、マイクロカメラの電源を投入し(ステップP41)、レンズ駆動機構を作動させ、フォーカシングレンズを無限遠リセット位置、即ちフォーカシングレンズを検出基準位置に設定する駆動を開始する(ステップP42)。MRセンサの出力信号のオフセット補正処理を実行し(ステップP43)、フォーカシングレンズの無限遠リセット位置への駆動完了を待ち(ステップP44)、撮影待機状態の設定を完了する(ステップP45)。
【0058】
図10は、上記した第1の実施形態のカメラの初期化シーケンスのタイミングを説明するタイミングチャートである。マイクロカメラの電源を投入し、フォーカシングレンズの無限遠リセット位置への駆動を開始する。この直後、MRセンサの出力信号のオフセット補正処理を開始し、フォーカシングレンズの無限遠リセット位置への駆動終了前に、着磁ピッチλの2周期分のデータを取得してオフセット補正処理を終了する。
【0059】
この処理では、フォーカシングレンズの無限遠リセット位置への設定完了までの期間はAF制御系(自動焦点調節系)は作動しないので、この期間を利用してMRセンサの出力信号のオフセット補正処理を実行するものである。MRセンサの出力信号のオフセット補正処理は、前記したとおり着磁ロッドの着磁ピッチλの2周期分のデータが取得できれば十分であり、λは一般的には200μm程度であるから、着磁ピッチλの2周期分のデータを取得するときは、フォーカシングレンズを400μm程度移動させればデータ取得が完了することになる。
【0060】
仮に、フォーカシングレンズの現在の位置(リセット動作を開始する位置)から無限遠リセット位置までの距離が400μm以下であるとしても、リセット動作の開始からオフセット補正のための着磁ロッドの着磁ピッチλのデータの取得を開始すれば、それだけデータ取得時間を短縮することができる。
【0061】
一般的には、フォーカシングレンズの無限遠リセット位置への設定完了までの期間よりもオフセット補正処理完了までの期間の方が短いから、オフセット補正処理に特別に時間は必要とせず、マイクロカメラの電源の投入から撮影待機状態に至るまでの期間を短縮することができる。
【0062】
図11は、マイクロカメラの電源を投入した後、オフセット補正処理をして撮影待機状態に入る、第2の実施形態のカメラの初期化シーケンスを説明するフローチャートで、オフセット補正処理のための時間を短縮できる処理手順を示すものである。
【0063】
第2の実施形態では、電源投入直後にフォーカシングレンズを無限遠リセット位置、即ちフォーカシングレンズを検出基準位置に設定した後に、フォーカシングレンズを通常撮影を行う被写体距離である3〜5mの距離(特定距離という)に設定するが、この期間内にオフセット補正処理を実行し、処理時間を短縮するものである。
【0064】
まず、マイクロカメラの電源を投入し(ステップP51)、レンズ駆動機構を作動させ、フォーカシングレンズを無限遠リセット位置(検出基準位置)に設定する(ステップP52)。次に、フォーカシングレンズを移動して撮影レンズ装置の合焦位置を通常撮影を行う被写体距離である3〜5mの距離(以下、特定距離という)の位置に設定する駆動を開始する(ステップP53)。
【0065】
MRセンサの出力信号のオフセット補正処理を実行し(ステップP54)、フォーカシングレンズの合焦位置を特定距離位置へ設定する駆動の完了を待ち(ステップP55)、撮影待機状態の設定を完了する(ステップP56)。
【0066】
図12は、上記した第2の実施形態のカメラの初期化シーケンスのタイミングを説明するタイミングチャートである。マイクロカメラの電源を投入し、まず、フォーカシングレンズの無限遠リセット位置への駆動を開始し、無限遠リセット位置への駆動終了する。この後、フォーカシングレンズの特定距離位置へ駆動を開始し、この直後、MRセンサの出力信号のオフセット補正処理を開始し、フォーカシングレンズの特定距離位置へ駆動終了前に、着磁ピッチλの2周期分のデータを取得してオフセット補正処理を終了する。
【0067】
この処理では、フォーカシングレンズの合焦位置を無限遠リセット位置から特定距離へ移動して設定完了するまでの駆動期間は、AF制御系(自動焦点調節系)は作動しないので、この期間を利用してMRセンサの出力信号のオフセット補正処理を実行するものである。撮影レンズ装置の駆動期間内にMRセンサの出力信号のオフセット補正処理を実行するから「端当り」の危険性はなく、オフセット補正に必要な移動距離も確保できる。
【0068】
また、フォーカシングレンズの合焦位置を無限遠リセット位置から特定距離へ移動させるだけであるから、この期間にオフセット補正処理が終了しておらず数ミクロン単位の正確な位置の検出ができていなくとも、実用上支障はない。
【0069】
上記した第1及び第2の実施形態のように、マイクロカメラの電源を投入した後に実行されるフォーカシングレンズの移動期間にMRセンサの出力信号のオフセット補正処理を実行することで、オフセット補正処理のための特別な時間を必要とせず、処理時間を短縮することができる。
【0070】
以上、撮影レンズ装置を構成する第2レンズL2 (フォーカシングレンズ)を移動させて、無限遠リセット位置或いは特定距離に移動させる構成について、第2レンズL2 の位置検出装置とオフセット補正処理について説明した。
【0071】
しかし上記したレンズ位置検出装置とオフセット補正処理は、ズームレンズを構成するバリエータやコンペンセータの位置検出装置と、オフセット補正処理にも適用できることは言うまでもない。以下、マイクロカメラ(MZC)に使用されるズームレンズの構成と、ズームレンズのバリエータやコンペンセータの位置検出装置を説明する。
【0072】
図13は、ズームレンズ30の光学系の構成の概略を説明する図であり、図13の(a)はズームレンズの焦点距離が広角端に設定されているときのズームレンズを構成するバリエータL11やコンペンセータL12の位置を示し、図13の(b)はズームレンズの焦点距離が望遠端に設定されているときのズームレンズを構成するバリエータL11やコンペンセータL12の位置を示している。
【0073】
ズーミング操作によりズームレンズを構成するバリエータL11やコンペンセータL12は、それぞれ独立に移動するように構成されている。なお、L13は収斂レンズ、70はズームレンズの結像位置に配置されたCCDを示す。
【0074】
図14は、上記したズームレンズ30のバリエータL11やコンペンセータL12の駆動機構と、バリエータL11やコンペンセータL12の位置を検出するMRセンサの配置の一例を説明する一部を切欠いた斜視図である。
【0075】
図14において、31は図示しないレンズ鏡筒の一部の形成されたズームレンズ機構を組み立てるフレームで、フレーム31の内側の一方の端部にはブロック31aを介して圧電素子32の一端が接着固定され、圧電素子32の他端には駆動軸兼着磁ロッド33が接着固定される。駆動軸兼着磁ロッド33はフレーム31の内側の形成された受部31dとフレーム31の内側の他方の端部31eとの間に軸方向に移動可能に保持されている。
【0076】
バリエータL11を保持するレンズ保持枠35の一端には、摩擦接触部34とこれに対向する位置に接触部材34aが配置され、両者の間に駆動軸兼着磁ロッド33が挟持されて図示されていない圧接バネにより圧接され、レンズ保持枠35と駆動軸兼着磁ロッド33とは適当な摩擦力で摩擦結合される。
【0077】
また、フレーム31の内側の一方の端部にはブロック31bを介して圧電素子42の一端が接着固定され、圧電素子42の他端には駆動軸兼着磁ロッド43が接着固定される。駆動軸兼着磁ロッド43はフレーム31の内側の形成された受部31fとフレーム31の内側の他方の端部31gとの間に軸方向に移動可能に保持されている。
【0078】
コンペンセータL12を保持するレンズ保持枠45の一端には、摩擦接触部44とこれに対向する位置に接触部材44aが配置され、両者の間に駆動軸兼着磁ロッド43が挟持されて図示されていない圧接バネにより圧接され、レンズ保持枠45と駆動軸兼着磁ロッド43とは適当な摩擦力で摩擦結合される。
【0079】
なお、レンズ保持枠35とレンズ保持枠45とは、それぞれが保持するバリエータL11とコンペンセータL12の光軸が同軸になるように、配置されているものとする。また、レンズ保持枠35やレンズ保持枠45が移動するとき、光軸方向に沿って正確に移動するように、適当な案内軸などを設けるとよい。
【0080】
上記した圧電素子32、駆動軸兼着磁ロッド33、摩擦接触部34と接触部材34aから構成される駆動機構、及び圧電素子42、駆動軸兼着磁ロッド43、摩擦接触部44と接触部材44aから構成される駆動機構は、先に図1で説明したインパクト型駆動機構と同様な駆動機構であり、その動作も同様であるから詳細な説明は省略する。
【0081】
レンズ保持枠35の摩擦接触部34には、磁気抵抗素子36が駆動軸兼着磁ロッド33に接近して設けられてMRセンサが構成されており、磁気抵抗素子36の出力信号からバリエータL11の位置を検出することができる。また、レンズ保持枠45の摩擦接触部44には、磁気抵抗素子46が駆動軸兼着磁ロッド43に接近して設けられてMRセンサが構成されており、磁気抵抗素子46の出力信号からコンペンセータL12の位置を検出することができる。
【0082】
図15も、上記したズームレンズ30のバリエータL11やコンペンセータL12の駆動機構と、バリエータL11やコンペンセータL12の位置を検出するMRセンサの配置の他の例を説明する一部を分解した斜視図である。
【0083】
図15において、レンズ鏡筒の一部に形成されたフレーム51にズームレンズ機構が組み立てられている。フレーム51には圧電素子52の一端が接着固定され、圧電素子52の他端には駆動軸53が接着固定される。駆動軸53はフレーム51から延長された支持部51aと支持部51bとにより軸方向に移動可能に保持されている。
【0084】
バリエータL11を保持するレンズ保持枠55の一端には、摩擦接触部54と圧接バネ54aが配置され、両者の間に駆動軸53が挟持され、圧接バネ54aの圧接力によりレンズ保持枠55と駆動軸53とは適当な摩擦力で摩擦結合されている。
【0085】
フレーム51の支持部51aには、レンズ保持枠55の移動方向に沿って延長された着磁ロッド57が設けられており、バリエータL11を保持するレンズ保持枠55の摩擦接触部54と反対側には磁気抵抗素子56が着磁ロッド57に接近して設けられてMRセンサが構成されている。この構成により磁気抵抗素子56の出力信号からバリエータL11の位置を検出できる。
【0086】
また、フレーム51には圧電素子62の一端が接着固定され、圧電素子62の他端には駆動軸63が接着固定される。駆動軸63はフレーム51から延長された支持部51aと支持部51bとにより軸方向に移動可能に保持されている。
【0087】
コンペンセータL12を保持するレンズ保持枠65の一端には、摩擦接触部64と圧接バネ64aが設けられ、両者の間に駆動軸63が挟持され、圧接バネ64aの圧接力によりレンズ保持枠65と駆動軸63とは適当な摩擦力で摩擦結合されている。
【0088】
コンペンセータL12を保持するレンズ保持枠65の摩擦接触部64と反対側には、磁気抵抗素子66が着磁ロッド57に接近して設けられてMRセンサが構成されている。この構成により、磁気抵抗素子66の出力信号からコンペンセータL12の位置を検出することができる。
【0089】
着磁ロッド57はバリエータL11の検出とコンペンセータL12の検出に共用されており、構成を簡単にすることができる。
【0090】
なお、レンズ保持枠55とレンズ保持枠65とは、それぞれが保持するバリエータL11とコンペンセータL12の光軸が同軸になるように、配置されているものとする。
【0091】
このようなズームレンズでは、焦点距離が広角端に設定されているときの各レンズ群の位置を初期位置とし、電源投入により各レンズ群が初期位置に移動する。即ち、例えば、各レンズ群の焦点距離が広角端と望遠端の間にある状態で、電源が投入されたときは、初期設定のために各レンズ群は焦点距離が広角端になるように移動を開始するから、この各レンズ群の移動期間にオフセット補正処理を行うことで、オフセット補正処理のための特別な初期化時間を必要とせず、処理時間を短縮することができる。
【0092】
以上説明したレンズの位置の検出には、着磁ロッドと磁気抵抗素子から構成されるMRセンサを使用したが、MRセンサに代えて、以下説明する光学スケールを使用した光学センサを使用することもできる。
【0093】
まず、図16を参照して光学スケールによる位置の検出原理を説明する。所定のピッチλで白黒パターンの縞模様を形成した光学スケールである第1スケール81と第2スケール82を縞模様の方向を揃えて密着する。縞模様に向けて光を投射し、その反射光RLを検出すると、白黒パターンの縞模様即ち、ピッチλで形成された縞模様の重なり状態に応じて反射光量が変化する。
【0094】
第1スケール81に対して第2スケール82を相対移動させると、第1スケール81に対する第2スケール82の相対位置と反射光量は、図17に示すように第1スケール81に対する第2スケール82の位置、即ち、第1スケール81に対する第2スケール82の重なり状態に応じて正弦波状に変化するから、反射光量の変化量を解析、例えば反射光量のピークの数を計数する等の方法により、光学スケールのピッチλに等しい分解能で第1スケール81に対する第2スケール82の移動距離の検出を行うことができる。
【0095】
例えば、第1スケール81をレンズ鏡筒側に配置し、第2スケール82をレンズ保持枠側に配置する。そして、レンズ保持枠が移動して第1スケール81に対して第2スケール82が移動するときの反射光量のピークの数を計数することでレンズ保持枠、即ちレンズの移動距離を検出することができる。
【0096】
なお、上記したこの発明の実施の形態は、マイクロカメラの撮影レンズ装置に適用した例で説明したが、この発明は、普通のオートフォーカスカメラ用の撮影レンズ装置の光学エレメントの位置の検出にも適用できることは言うまでもない。特にレンズ交換形式の撮影レンズ装置では、カメラの電源投入時のほか、レンズ交換を行ったときにオフセットを補正する補正処理を実行するとよい。
【0097】
また、上記したこの発明の実施の形態は、撮像装置、即ちカメラとして説明したが、この発明の実施の形態の撮像装置は全体を極めて小型に構成することができるので、種々の携帯機器、例えば携帯電話、携帯情報端末装置などに装備することができる。なお、この発明の実施の形態の撮像装置を装備する携帯電話、携帯情報端末装置などは、それ自体は公知の構成であるから、ここでは詳細な説明は省略する。
【0098】
そして、この発明の実施の形態の撮像装置を装備した携帯機器では、携帯機器の電源の投入から待機状態に入るまでの時間が短く、焦点が良く合った画像を撮影することができるから、撮影を意図したときすぐに焦点が良く合った高品質の画像を撮影して所望の相手に送信することが可能となる。
【0099】
この発明の実施の形態には、以下の構成を備える発明が含まれる。
【0100】
(1)請求項1において、位置検出手段の出力信号の外的要因に基づく変動の補正処理は、前記位置検出手段から出力される出力信号の、所定の基準値からのずれを補正するオフセット補正処理であることを特徴とする請求項1記載の撮像装置。
【0101】
(2)請求項1において、位置検出手段の出力信号の外的要因に基づく変動の補正処理は、位置検出手段の出力信号の最大値と最小値を検出し、その最大値と最小値との中心値と、所定の基準値との差を許容範囲以下になるように補正するオフセット補正処理であることを特徴とする請求項1記載の撮像装置。
【0102】
(3)請求項1において、位置検出手段は、磁気抵抗素子と、該磁気抵抗素子に接近して配置された一定間隔で着磁された着磁ロッドとから構成され、前記光学エレメントの移動に伴う磁気抵抗素子と着磁ロッドとの相対移動により磁気抵抗素子から出力される出力信号の変化により光学エレメントの移動距離を検出することを特徴とする請求項1記載の撮像装置。
【0103】
(4)請求項1において、位置検出手段は、前記光学エレメント保持枠に固定された磁気抵抗素子と、該磁気抵抗素子に接近して配置された一定間隔で着磁された着磁ロッドとから構成され、前記光学エレメントの移動に伴う磁気抵抗素子と着磁ロッドとの相対移動により磁気抵抗素子から出力される出力信号の変化により光学エレメントの移動距離を検出することを特徴とする請求項1記載の撮像装置。
【0104】
(5)請求項1において、位置検出手段は、所定間隔で形成された縞模様を有する光学スケールと、光学スケールを読み取る光センサーとから構成され、前記光学エレメントと共に移動する光学スケールの移動に伴う前記光センサーの出力信号の変化により光学エレメントの移動距離を検出することを特徴とする請求項1記載の撮像装置。
【0105】
(6)請求項1において、位置検出手段は、前記光学エレメント保持枠に固定された一定間隔で形成された縞模様を有する第1の光学スケールと、該第1の光学スケールに接近して固定配置された一定間隔で形成された縞模様を有する第2の光学スケールと、前記第1及び第2の光学スケールを読み取る光センサーとから構成され、前記光学エレメントの移動に伴う前記第1の光学スケールと第2の光学スケールとの相対移動に伴う前記光センサーの出力信号の変化により光学エレメントの移動距離を検出することを特徴とする請求項1記載の撮像装置。
【0106】
【発明の効果】
以上説明したとおり、請求項1の発明では、カメラの電源を投入して起動したとき、撮影レンズ装置を構成する光学エレメントの位置を検出する位置検出装置から出力される出力信号の外的要因に基づく変動(オフセット)を補正する補正処理を実行するが、この出力信号の補正処理(オフセット補正処理)を、光学エレメントの駆動を開始させると同時に実行するように構成した。
【0107】
この構成により、光学エレメントが所定の初期位置に移動する期間内に位置検出装置からの出力信号の外的要因に基づく変動の補正処理が実行され、補正処理のための特別な時間を必要としないから、カメラの電源の投入から待機状態に入るまでの時間を短縮することができると共に、カメラの電源投入の都度、位置検出装置からの出力信号の補正処理(オフセット補正処理)が必ず実行されるから、常に光学エレメントの位置の検出を高精度で安定して実行することができ、カメラの電源の投入から待機状態に入るまでの時間が短く、焦点が良く合った画像を撮影できる撮像装置を提供することができる。
【0108】
また、請求項5の発明は、請求項1記載の発明に係る撮像装置を備えた携帯機器であるから、携帯機器の電源の投入から待機状態に入るまでの時間が短く、焦点が良く合った画像を撮影できる撮像装置を備えた携帯機器を提供することができる。
【図面の簡単な説明】
【図1】マイクロカメラの撮影レンズの構成を説明する断面図。
【図2】MRセンサを構成する着磁ロッドの磁極間隔と磁気抵抗素子との配置と出力信号を説明する図。
【図3】磁気抵抗素子の等価回路を示す図。
【図4】磁気抵抗素子の出力信号のオフセットが位置検出に与える影響を説明する図。
【図5】オフセット補正回路の構成を示すブロック図。
【図6】オフセット補正演算処理を説明するフローチャート。
【図7】端当り確認処理の詳細を説明するフローチャート。
【図8】オフセット処理の詳細を説明するフローチャート。
【図9】第1の実施形態のカメラの初期化シーケンスを説明するフローチャート。
【図10】第1の実施形態のカメラの初期化シーケンスのタイミングを説明するタイミングチャート。
【図11】第2の実施形態のカメラの初期化シーケンスを説明するフローチャート。
【図12】第2の実施形態のカメラの初期化シーケンスのタイミングを説明するタイミングチャート。
【図13】ズームレンズの光学系の構成の概略を説明する図。
【図14】ズームレンズのバリエータやコンペンセータの駆動機構と、その位置を検出するMRセンサの配置の一例を説明する一部を切欠いた斜視図。
【図15】ズームレンズのバリエータやコンペンセータの駆動機構と、その位置を検出するMRセンサの配置の他の例を説明する一部を分解した斜視図。
【図16】光学スケールによる位置の検出原理を説明する図。
【図17】第1及び第2の光学スケールの相対位置と反射光量の変化を説明する図。
【符号の説明】
10 撮影レンズ装置
11 レンズ鏡筒
11a 第3レンズ保持枠
12 第1レンズ保持枠
13 第2レンズ保持枠
13a 摩擦接触部
13b 接触部材
13c 圧接バネ
13d 摺動部
14 圧電素子
15 駆動軸兼着磁ロッド
16 磁気抵抗素子
19 案内軸
21 MRセンサ
22 増幅器
23 オフセット補正器
24 A/D変換器
25 オフセット補正演算器
26 D/A変換器
30 ズームレンズ
31 フレーム
32、42 圧電素子
33、43 駆動軸兼着磁ロッド
34、44 摩擦接触部
34a、44a 接触部材
35、45 レンズ保持枠
36、46 磁気抵抗素子
51 フレーム
51a、51b 支持部
52、62 圧電素子
53、63 駆動軸
54、64 摩擦接触部
54a、64a 圧接バネ
55、65 レンズ保持枠
56、66 磁気抵抗素子
57 着磁ロッド
70 CCD
81 第1スケール
82 第2スケール
L1 第1レンズ
L2 第2レンズ
L3 第3レンズ
L11 バリエータ
L12 コンペンセータ
L13 収斂レンズ
【特許請求の範囲】
【請求項1】
複数の光学エレメントで構成された撮影レンズ装置と、
前記光学エレメントを駆動する駆動手段と、
前記駆動手段により駆動される前記光学エレメントの位置を検出する位置検出手段と、
前記駆動手段及び位置検出手段を制御する制御手段と
を備えた撮像装置において、
前記制御手段は、撮像装置の撮像機能が起動されたときは、光学エレメントの駆動を開始させると同時に位置検出手段の出力信号の外的要因に基づく変動の補正処理を実行すること
を特徴とする撮像装置。
【請求項2】
前記撮像装置の撮像機能の起動とは、撮像装置の電源投入による撮像機能の起動であることを特徴とする請求項1記載の撮像装置。
【請求項3】
前記位置検出手段の出力信号の外的要因に基づく変動の補正処理とは、位置検出手段の取付誤差、環境温度の変化、位置検出手段の経年変化を含む外的要因に基づく出力信号の変動の補正処理であることを特徴とする請求項1記載の撮像装置。
【請求項4】
前記光学エレメントには、少くとも撮影レンズ装置を構成するバリエータ、コンペンセータ、フォーカスレンズのいずれかが含まれることを特徴とする請求項1記載の撮像装置。
【請求項5】
前記請求項1乃至4のいずれかに記載する撮像装置が組み込まれていることを特徴とする携帯機器。
【請求項1】
複数の光学エレメントで構成された撮影レンズ装置と、
前記光学エレメントを駆動する駆動手段と、
前記駆動手段により駆動される前記光学エレメントの位置を検出する位置検出手段と、
前記駆動手段及び位置検出手段を制御する制御手段と
を備えた撮像装置において、
前記制御手段は、撮像装置の撮像機能が起動されたときは、光学エレメントの駆動を開始させると同時に位置検出手段の出力信号の外的要因に基づく変動の補正処理を実行すること
を特徴とする撮像装置。
【請求項2】
前記撮像装置の撮像機能の起動とは、撮像装置の電源投入による撮像機能の起動であることを特徴とする請求項1記載の撮像装置。
【請求項3】
前記位置検出手段の出力信号の外的要因に基づく変動の補正処理とは、位置検出手段の取付誤差、環境温度の変化、位置検出手段の経年変化を含む外的要因に基づく出力信号の変動の補正処理であることを特徴とする請求項1記載の撮像装置。
【請求項4】
前記光学エレメントには、少くとも撮影レンズ装置を構成するバリエータ、コンペンセータ、フォーカスレンズのいずれかが含まれることを特徴とする請求項1記載の撮像装置。
【請求項5】
前記請求項1乃至4のいずれかに記載する撮像装置が組み込まれていることを特徴とする携帯機器。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【公開番号】特開2004−157322(P2004−157322A)
【公開日】平成16年6月3日(2004.6.3)
【国際特許分類】
【出願番号】特願2002−322841(P2002−322841)
【出願日】平成14年11月6日(2002.11.6)
【出願人】(000006079)ミノルタ株式会社 (155)
【Fターム(参考)】
【公開日】平成16年6月3日(2004.6.3)
【国際特許分類】
【出願日】平成14年11月6日(2002.11.6)
【出願人】(000006079)ミノルタ株式会社 (155)
【Fターム(参考)】
[ Back to top ]