
操作装置および可動機械制御システム
【課題】操作装置に印字されたキー名称が、作業者が使用する言語で表現されていない場合、操作を誤る可能性がある。
【解決手段】操作装置TPは、制御対象を操作するための複数の操作キー8がレイアウトされた操作部6と、操作キーの入力に応じた画面が表示される表示部5とを有している。操作部6には、操作キーの名称が作業者の母国語とは異なる言語で印字されている。操作装置TPの本体または接続先のコントローラは、操作キーの名称を作業者の母国語によってガイドするためのガイド情報を記憶する記憶手段を備える。そして、所定の操作が行われると、作業者の母国語によって操作キーの名称および画像が表示部5に表示される。本発明により、作業者は自身が普段使用する母国語によってキー名称を認識することができる。
【解決手段】操作装置TPは、制御対象を操作するための複数の操作キー8がレイアウトされた操作部6と、操作キーの入力に応じた画面が表示される表示部5とを有している。操作部6には、操作キーの名称が作業者の母国語とは異なる言語で印字されている。操作装置TPの本体または接続先のコントローラは、操作キーの名称を作業者の母国語によってガイドするためのガイド情報を記憶する記憶手段を備える。そして、所定の操作が行われると、作業者の母国語によって操作キーの名称および画像が表示部5に表示される。本発明により、作業者は自身が普段使用する母国語によってキー名称を認識することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、操作部および表示部を有した、例えば家庭用電化製品等を操作するための操作装置や、産業用ロボット等の可動機械の教示作業に用いる操作装置およびこの操作装置を有する可動機械制御システムに関するものである。
【背景技術】
【0002】
制御対象を操作する操作子としてのキーやボタンが複数設けられた操作部と、この操作部による操作結果やメッセージ等を表示する表示部とを備えた操作装置が公知である。例えば、空気清浄機のように、操作装置が制御対象としての本体に一体的に組み込まれたパターンのものがあれば、エアコンのように、操作装置が本体とは別体のリモコンとして切り離されたパターンのものもある。工作機械や産業ロボット等の加工分野においても同様であり、制御対象としての可動機械を操作するための操作部および表示部を有した操作装置が知られている。この操作装置はティーチペンダントとも呼ばれ、作業者が持ち運び可能な可搬式のスタイルが採用されることが多い(例えば、特許文献1、2参照)。
【0003】
上記操作装置においては、作業者が意図したとおりの作用・機能が発揮されるよう、各操作子の表面あるいは近傍には、その名称が識別可能に印字加工されている。例えば家庭用電化製品であれば、操作装置に配置されたプラスチック部材等からなる操作子に、直接印字加工されることが多い。工作機械であれば、複数の操作子の各々に対応する態様で意匠が描画されたキーシートを、操作部の全面が覆われるように貼付することが良く行われている。上記意匠部分は、エンボス部を形成するように加工されており、このエンボス部の表面または近傍の空白領域に操作子の名称が印字される。そして、エンボス部を押し下げたときに、キーシート直下の対応する操作子が押下されて操作を受け付けるようになっている。
【0004】
ここで、印字加工される操作子名称について説明する。例えば、データの記憶操作を受け付ける操作子には「記憶」の文字が、削除操作を受け付ける操作子には「削除」の文字が印字されている。この場合、日本人の作業者が操作装置を使う場合は問題がないが、外国人は理解することができない。そこで、外国に出荷される場合は、その出荷先で使用される言語に応じて操作子名称の印字内容を変更する(キーシートを採用している場合は異なる言語を印字したキーシートを貼付する)ことが行われている。しかしながら、各国の言語に応じて印字内容を変更するようにしたとしても、後述する課題を有している。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2001−88069号公報
【特許文献2】特開2002−91665号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
例えば、キー名称が英語で印字された米国出荷用の操作装置に対して、出荷前の品質確認作業や出荷後の設置作業等を日本人が行う場合は、慣れていない言語で表現された操作装置を操作する必要があるために、操作キーを識別するまでに多くの時間を要してしまう。ましてや、中国語、韓国語、タイ語、インド語等で印字された操作装置になると、全く理解することができない可能性が高くなるために、操作キーを識別するまでにさらに多くの時間を必要とする。
【0007】
そこで、本発明は、操作子の名称が出荷国に応じた第1言語で印字されている場合に、第1言語に精通していない他国語を使用する作業者であっても、各操作子の名称を容易に識別することができる操作装置を提供することを目的としている。また、この操作装置を用いた可動機械制御システムを提供することを目的としている。
【課題を解決するための手段】
【0008】
請求項1の発明は、制御対象を操作する操作装置であって、
前記制御対象を操作するための複数の操作子がレイアウトされるとともに、前記操作子の名称が第1言語で印字された操作部および前記操作子の入力に応じた画面が表示される表示部と、
前記操作子の各々の名称を前記第1言語とは異なる他言語でガイドするためのガイド情報を記憶する記憶手段と、
所定の操作を入力として前記ガイド情報を前記表示部に出力するガイド情報制御手段と、を備えたことを特徴とする操作装置である。
【0009】
請求項2の発明は、前記ガイド情報は、前記操作部を画像化した操作部画像データ内に描画された各々の操作子の名称を前記他言語で識別可能に付記したガイド表示データであり、
前記ガイド情報制御手段は、前記所定の操作がなされたときに前記ガイド表示データを前記表示部に出力することを特徴とする請求項1記載の操作装置である。
【0010】
請求項3の発明は、前記ガイド表示データは、複数の言語に各々対応して設けられていることを特徴とする請求項2記載の操作装置である。
【0011】
請求項4の発明は、前記記憶手段は、印字された前記第1言語を消去した態様で前記操作部を画像化した操作部画像データと、前記操作子の名称データおよびこの名称データの前記操作部画像データ上におけるレイアウト位置を示す名称レイアウト情報を関連付けた操作子名称テーブルとを記憶しており、
前記ガイド情報制御手段は、前記所定の操作がなされたときに、前記名称レイアウト情報に従って前記操作部画像データに前記名称データを重ね合わせてガイド表示データを生成し、このガイド表示データを前記表示部に出力することを特徴とする請求項1記載の操作装置である。
【0012】
請求項5の発明は、前記操作子名称テーブルは、複数の言語に各々対応して設けられていることを特徴とする請求項4記載の操作装置である。
【0013】
請求項6の発明は、前記ガイド情報制御手段は、前記第1言語とは異なる予め定めた第2言語の名称データを用いて前記ガイド表示データを生成することを特徴とする請求項3または請求項5記載の操作装置である。
【0014】
請求項7の発明は、前記表示部に表示された前記第2言語のガイド表示データを別の他言語に切り換えるための言語切換え手段を備えたことを特徴とする請求項6記載の操作装置である。
【0015】
請求項8の発明は、前記操作部画像データには、各々の操作子を識別するための識別IDがさらに描画されていることを特徴とする請求項2〜7のいずれか1項に記載の操作装置である。
【0016】
請求項9の発明は、前記ガイド情報制御手段は、前記ガイド表示データを半透明加工し、前記表示部で表示中の画面に重ねて表示することを特徴とする請求項3〜8のいずれか1項に記載の操作装置である。
【0017】
請求項10の発明は、請求項1〜9のいずれか1項に記載の操作装置と、前記制御対象としての可動機械と、この可動機械を制御するためのコントローラとが通信可能に接続されたことを特徴とする可動機械制御システムである。
【0018】
請求項11の発明は、前記記憶手段および前記ガイド情報制御手段は、前記コントローラに備えられていることを特徴とする請求項10記載の可動機械制御システムである。
【0019】
請求項12の発明は、可動機械を制御するためのコントローラと、このコントローラと通信可能に接続された操作装置とを有する可動機械制御システムにおいて、
前記操作装置は、前記可動機械を操作するための複数の操作子がレイアウトされるとともに、前記操作子の名称が第1言語で印字された操作部および前記操作子の入力に応じた画面が表示される表示部と、を有しており、
前記コントローラまたは前記操作装置の少なくともいずれか一方は、
印字された前記第1言語を消去した態様で前記操作部を画像化した操作部画像データと、前記操作子の各々に対応し前記第1言語とは異なる他言語で表現された名称、識別IDおよび前記操作部画像データ上の操作子レイアウト情報を関連付けた操作子テーブルとを記憶する記憶手段と、
所定の操作を入力として、前記名称を前記表示部の第1領域に出力し、前記操作部画像データを前記表示部の第2領域に出力する出力手段と、
前記第1領域に表示された名称の中からいずれか1つを選択する第1領域選択手段と、
前記第2領域で表示された複数の操作子の中からいずれか1つを選択する第2領域選択手段と、
前記第1領域および前記第2領域での互いの選択結果を前記識別IDおよび前記レイアウト情報に基づいて連動させるガイド情報制御手段と、を備えたことを特徴とする可動機械制御システムである。
【0020】
請求項13の発明は、前記表示部はタッチパネルからなり、前記第1領域における前記操作子の選択は、前記タッチパネルから得られた位置情報により行われることを特徴とする請求項12記載の可動機械制御システムである。
【発明の効果】
【0021】
本発明によれば、操作装置に備えられた操作子の名称が、作業者が普段使用する言語で表記されていない場合であっても、操作子の名称を容易に認識することができる。
【図面の簡単な説明】
【0022】
【図1】本発明に係る操作装置を産業用のロボット制御システムに組み込んだ場合の構成図である。
【図2】操作装置の一例としてのティーチペンダントTPの詳細な外観図である。
【図3】本発明の一実施形態としてのロボット制御システムの機能ブロック図である。
【図4】ガイド表示データがティーチペンダントのディスプレイに表示された様子を説明するための図である。
【図5】操作部を画像化した操作部画像データおよび名称レイアウト情報を説明するための図である。
【図6】キー名称を表示する領域と操作部画像データを表示する領域とを分けて表示した場合の画面例である。
【図7】キー名称、レイアウト情報等が関連付けられた操作キーテーブルを説明するための図である。
【発明を実施するための形態】
【0023】
発明の実施の形態を実施例に基づき図面を参照して説明する。
【0024】
[第1実施形態]
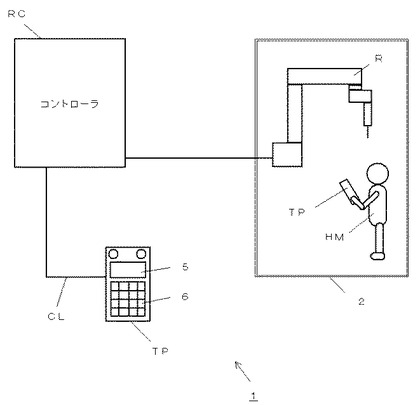
図1は、本発明に係る操作装置を産業用のロボット制御システムに組み込んだ場合の構成図である。同図に示すように、ロボット制御システム1は、アーク溶接、スポット溶接等の作業を行うロボットR、作業者HMが教示作業を行う際に用いる操作装置としてのティーチペンダントTP、そしてロボットRの動作制御を行うコントローラRCから大略構成される。
【0025】
ロボットRは、手首部先端にアーク溶接トーチ、スポット溶接ガン等の作業ツールが取り付けられており、安全柵2の内側領域に設置されている。
【0026】
ティーチペンダントTPは、各種データや操作結果を表示するディスプレイ5、およびロボットRの操作を行うため操作部6を備えている。操作部6には、ロボットRを手動操作により移動させるためのジョグ送りキー、ロボットRに対する教示データを記憶する記憶キー、教示データを削除する削除キー等の各種操作キーが備わっている。これらの操作キーが押下されると、操作信号として通信線CLを介してコントローラRCに送信される。コントローラRCは、操作信号に基づいてロボットRのジョグ送り操作、教示データの記憶等の各処理を行う。
【0027】
コントローラRCは、ティーチペンダントTPから送信される操作入力に従ってロボットRを制御したり教示データの記憶処理を行ったりする。また、外部から起動信号が入力されることにより教示データを再生する。この結果、ロボットRが自動運転される。
【0028】
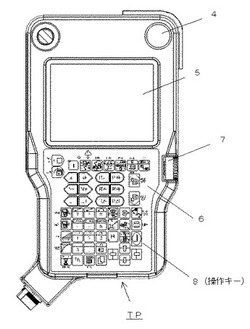
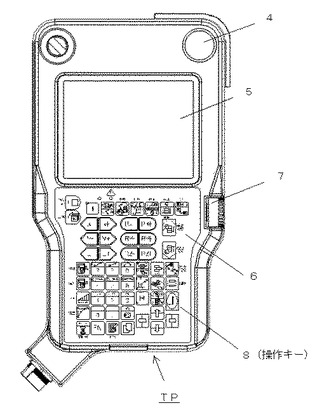
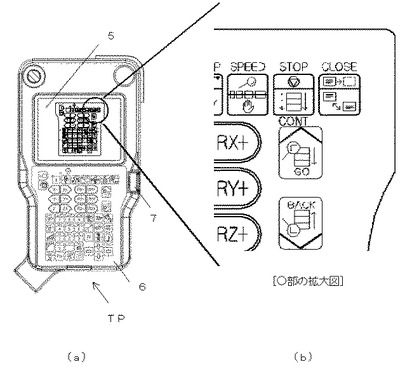
図2は、ティーチペンダントTPの詳細な外観図である。同図に示すように、ティーチペンダントTPは、上述したディスプレイ5および操作部6以外に、ロボットRを緊急停止させる非常停止スイッチ4、メニュー等の選択操作を容易に行うための手段としてジョグダイヤル7を備えている。
【0029】
操作部6は、キーシートにより構成されており、キーシート上においては図示するような態様で複数の操作キー8がレイアウトされている。また、操作キー8の各々が有する作用や機能は、図形やアルファベット等の内容により識別できるよう、アイコンで表現されている。さらに、操作キー8を言語情報でも識別できるように、操作キー8の表面または近傍にキー名称が印字されている。キー名称は、使用される国の言語(第1言語)によって印字されている。例えば、日本国内で使用される操作装置の記憶キーであれば、「記憶」の概念が分かるアイコン表示に加えて、「記憶」の文字が印字されている。ディスプレイ5は、キー名称をガイドしたり確認したりするためのガイド情報を表示する。
【0030】
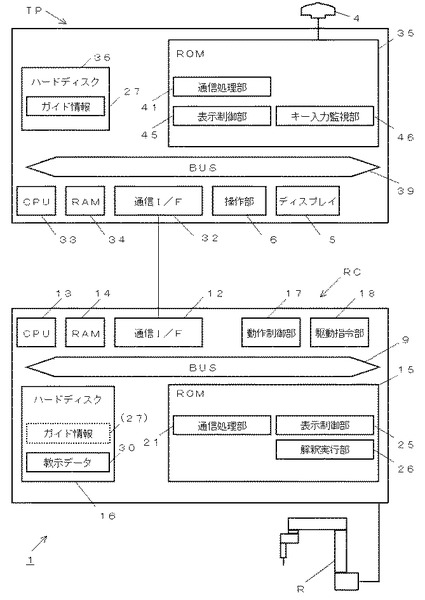
図3は、上述したロボット制御システム1の機能ブロック図である。以下、ティーチペンダントTPおよびコントローラRCについて、詳細に説明する。
【0031】
まず、ティーチペンダントTPについて説明する。ティーチペンダントTPは、上述した非常停止スイッチ4、ディスプレイ5および操作部6に加えて、CPU33、RAM34、通信インターフェース32、ROM35およびハードディスク36の各部を備えている。なお、各部はバス39を介して接続されている。
【0032】
CPU33は、中央演算処理装置であり、ROM35に格納されたソフトウェアプログラムを図示しないオペレーティングシステム上で実行する。CPU33は、ガイド情報制御手段に相当する。RAM34は、一時的な計算領域である。通信インターフェース32は、コントローラRCとの通信を行う。ROM35は、CPU33により実行されるソフトウェアプログラムや制御定数を記憶している。
【0033】
記憶手段としてのハードディスク36は、ガイド情報27を記憶している。ガイド情報27とは、操作キー8の各々の名称を、上述した第1言語とは異なる他の言語でガイドするためのデータのことであり、本実施例では、操作キー8の名称が印字されていない操作部6を画像化した操作部画像データに対して、各操作キー8の名称を識別可能に付記した静止画像を指している。このデータのことを、以下では、ガイド表示データと呼ぶ。このガイド情報表示データは、例えば、英語用、中国語用等、複数の言語に各々対応して設けられている。同時に表示できるデータは1つとしており、第1言語とは異なる言語(第2言語)に対応したガイド情報表示データを呼び出すことができる。上記第2言語とは、作業者が普段使う言語であり、予め定められている。
【0034】
ROM35は、上記各部を総括的に制御するための制御ソフトウェアとして、表示制御部45、キー入力監視部46および通信処理部41を備えている。表示制御部45は、ディスプレイ5に表示用データを表示する。キー入力監視部46は、操作部6からのキー入力を監視する。通信処理部41は、コントローラRCとの通信を制御する処理を行う。
【0035】
次に、コントローラRCについて説明する。コントローラRCは、CPU13、RAM14、ROM16、ハードディスク19、動作制御部17、駆動指令部18、ティーチペンダントTPと通信を行うための通信インターフェース12の各部を備えている。なお、各部はバス9を介して接続されている。
【0036】
CPU13は、中央演算処理装置であり、ROM15に格納されたソフトウェアプログラムを図示しないオペレーティングシステム上で実行する。RAM14は、一時的な計算領域である。通信インターフェース12は、ティーチペンダントTPとの通信を行う。ROM15は、CPU13により実行されるソフトウェアプログラムや制御定数を記憶している。ハードディスク16は、ティーチペンダントTPの操作により作成された教示データ30を記憶している。このハードディスク16に、操作キー8の各々の名称をガイドするためのガイド情報27を記憶するようにしてもよい。この場合、CPU13はガイド情報制御手段に相当し、ハードディスク16は記憶手段に相当することになる。
【0037】
ROM15は、上記各部を総括的に制御するための制御ソフトウェアとして、通信処理部21、表示処理部25および解釈実行部26およびを備えている。通信処理部21は、ティーチペンダントTPとの通信処理を行う。表示処理部25は、ティーチペンダントTPのディスプレイ5に表示する表示用データを生成する。解釈実行部26は、ハードディスク16に記憶された教示データ30を解釈して動作制御部17に動作制御信号を出力する。動作制御部17は、動作制御信号に基づいてロボットRの軌跡演算等を行い、演算結果を駆動信号として駆動指令部18に出力する。駆動指令部18は、ロボットRの各サーボモータを回転制御するためのサーボ制御信号を出力する。この結果、ロボットRが移動制御される。
【0038】
次に、ティーチペンダントTPの作用について説明する。ティーチペンダントTPの所定のキー操作またはメニューからガイド表示データの呼び出し操作が行われると、ガイド情報制御手段としてのCPU33は、ハードディスク36からガイド情報表示データを1つ読み出してディスプレイ5に出力する。
【0039】
図4は、ガイド表示データがティーチペンダントTPのディスプレイ5に表示された様子を説明するための図である。同図(a)に示すように、ガイド表示データの呼び出し操作が行われると、ガイド表示データがディスプレイ5に表示される。同図(b)は、ガイド表示データの一部分(同図(a)の○で囲んだ部分)を説明のために拡大した図である。操作部6に操作キー8の名称が普段使わない第1言語で印字されていても、同図(b)に示すように、ディスプレイ5には、操作キー8の名称が第2言語により識別可能に表示される。ガイド表示データは、ジョグダイヤル7の操作により拡大または縮小することができるようにしてもよい。
【0040】
以上説明したように、本発明の第1実施形態によれば、操作部6のキー名称が、作業者が普段使わない言語で印字されていたとしても、作業者が普段使う言語で表現されたガイド表示データをティーチペンダントTPに表示するようにしたことによって、作業者がキー名称を容易に識別することができる。また、ガイド表示データを複数の言語毎に対応して設けたことによって、作業者の使用言語に応じたフレキシブルな対応を取ることが可能になる。
【0041】
なお、上記実施形態において、表示されるガイド表示データは予め定めた1つの言語に対応したものとしたが、言語の切替メニューを備えておき、このメニューの操作によって表示するガイド表示データを切り替え可能に構成してもよい。
【0042】
[第2実施形態]
次に、本発明の第2実施形態について説明する。第1実施形態では、ディスプレイ5に表示するガイド表示データを、日本語用、英語用等、言語毎に複数設けた。しかしながら、言語毎にガイド表示データを複数設ける方式では、それだけ記憶容量を費やしてしまう。そこで、操作キー8の名称を付記する以前の操作部画像データと、言語情報とを別々に保存しておき、ガイド表示の操作要求があるタイミングで両者を合成してガイド表示データを作成し表示するというのが第2実施形態である。以下、第1実施形態との相違部分について説明する。
【0043】
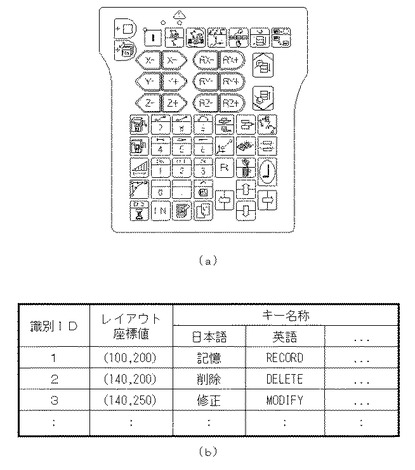
図5は、操作部6を画像化した操作部画像データおよび名称レイアウト情報を説明するための図である。同図(a)は、操作キー8の名称が付記されていない操作部6を、そのまま静止画像化した操作部画像データを示している。同図(b)は、各操作キー8の識別ID(番号)、キー名称および操作部画像データ上のレイアウト座標値を管理している操作子名称テーブルである。レイアウト座標値とは、キー名称が、操作部画像データ内のどの位置に配置されるのかを示すデータであり、例えば、識別IDが「1」のキーであれば、(100,200)で表現される座標位置をキー名称の開始位置として描画処理される。上記操作部画像データおよび操作子名称テーブルは、ガイド情報27としてハードディスク36に記憶される。あるいは、コントローラRC側のハードディスク16に記憶するようにしても良い。
【0044】
次に、ティーチペンダントTPの作用について説明する。ティーチペンダントTPの所定のキー操作またはメニューからガイド表示データの呼び出し操作が行われると、ガイド情報制御手段としてのCPU33は、ハードディスク36から図5(a)で示した操作部画像データを読み出す。また、図5(b)で示した操作子名称テーブルを参照し、予め第2言語として定められた言語に応じたキー名称およびレイアウト座標値を全て読み出して、操作部画像データ上に描画処理を行う。そして、描画処理によって得られたガイド表示データをディスプレイ5に出力する。この結果、図4のような表示が行われる。なお、上記識別IDも併記するようにしてもよい。
【0045】
このように、第2実施形態では、操作部6を画像化した操作部画像データと、キー名称および操作部画像データ上におけるレイアウト位置を示す名称レイアウト情報を関連付けた操作子名称テーブルとを予め記憶しておき、所定の操作がなされたときに、操作部画像データにキー名称を重ね合わせてガイド表示データを生成し、ディスプレイ5に表示するようにした。このようにすることによって、言語毎にガイド表示データを持つのに比べて記憶容量を抑えることができる。
【0046】
また、キー名称に加えて識別IDも併記することにより、識別性をより向上させることができる。例えば、ティーチペンダントTPを操作する作業者の熟練度には個人差がある。実際の作業現場においては、熟練度の高い作業者が、操作に不慣れな作業者に対して、操作方法を指示することがある。不慣れな作業者の周囲に熟練した作業者がいない場合は、電話等の媒体を用いて熟練者が遠隔地から操作方法を伝達することがある。この場合、熟練者が指示した操作キーと不慣れな作業者が把握する操作キーとの間に誤解が生じる可能性がある。例えば、熟練者から記憶キーを押下する指示がなされたにも関わらず、記憶キーの場所が分からない作業者は、誤ったキーを押す可能性がある。これは、情報の伝達がキー名称という言語情報に頼っているから起こりえる。そこで、本発明においては、キー名称に加えて、数値などの識別IDを併記しておくことにより、例えば「1番のキー」という表現を用いて容易に操作方法を伝達することができる。
【0047】
[第3実施形態]
次に、本発明の第3実施形態について説明する。第1および第2実施形態では、操作部6の画像である操作部画像データにキー名称を付記したガイド表示データを言語毎に表示するよう構成した。第3実施形態では、ディスプレイ5をタッチパネルにより構成し、さらに、キー名称を表示する第1領域と操作部画像データを表示する第2領域とに分けて表示し、両表示領域を連動させるようにしている。以下、第2実施形態との相違部分について説明する。
【0048】
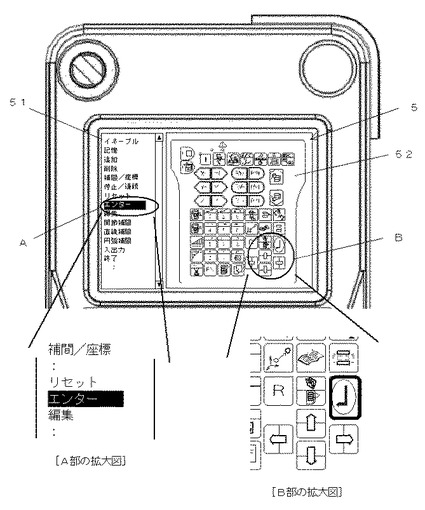
図6は、キー名称を表示する領域と操作部画像データを表示する領域とを分けて表示した場合の画面例を示している。同図に示すように、ディスプレイ5の表示は、第1領域51と第2領域52とに分割される。そして、第1領域51にはキー名称が一覧表示され、第2領域52には、操作部6のキー名称が消去された態様で画像化した操作部画像データが表示される。そして、第1領域51および第2領域52は、タッチ操作により、いずれか1つのキーを選択可能になっており、互いの選択結果は連動するようになっている。具体的には、A部の拡大図に示しているように、第1領域51で「エンター」キーを選択すると、B部の拡大図に示しているように、該当するエンターキーの意匠が第2領域52で選択された状態になる(例えば、図示するように、太枠や色つき枠等、識別可能な程度の装飾がなされた枠で囲まれる)。逆も同じであり、第2領域52で任意のキーを選択すると、該当するキーが第1領域51で選択された状態になる(例えば図示するように、反転表示される)。
【0049】
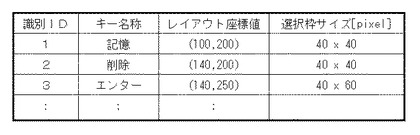
図7は、キー名称、レイアウト情報等が関連付けられた操作子テーブルを示している。同図に示すように、操作子テーブルでは、識別IDおよびキー名称に加えて、レイアウト情報としての座標値および選択枠サイズが定義されている。選択枠サイズとは、第1領域51で選択されたキー名称に対応する操作キーがどれに該当するかを識別可能に表示するための枠の大きさが定められている。例えば、上述した図6の「エンター」キーであれば、40×60ピクセルの大きさの枠であり、そのレイアウト位置は操作部画像データの(140、250)で表現される座標位置であることが定められている。
【0050】
上述した操作部画像データおよび操作子テーブルは、ガイド情報27としてコントローラRCのハードディスク16に予め記憶されている。そして、所定の操作が行われると、出力手段としてのCPU13は、操作部画像データおよび操作子テーブルを読み出して、通信I/F12、32を介してディスプレイ5の第1領域51にキー名称の一覧を出力し、第2領域52に操作部画像データを出力する。さらに、ティーチペンダントTPのCPU33は、タッチパネルから得られる位置情報に基づいて、どちらの領域でどのキーが選択されたかを識別し、コントローラRCへ通知する。ガイド情報制御手段としてのCPU13は、第1領域51または第2領域52での互いの選択結果を操作子テーブルの識別IDおよびレイアウト情報に基づいて連動させる。
【0051】
このように、第3実施形態では、操作部6のキー名称を消去した態様で画像化した操作部画像データと、キー名称、識別IDおよび操作キーのレイアウト情報を記憶しておき、所定の操作が行われると、ディスプレイ5の表示領域を、キー名称を表示する第1領域と、操作部画像データを表示する第2領域に分割して、それぞれを同時に表示する。そして、それぞれの領域での互いの選択結果を連動させる。こうすることによって、作業者は、各操作子の名称を容易に識別可能にすることができる。
【0052】
なお、上述した第1〜第3実施形態では、本発明に係る操作装置を産業用のロボット制御システムに組み込んだ形態を示したが、本発明は、上記各実施形態に限定されるものではない。本発明に係る操作装置の技術思想は、表示部及び操作部を有する、エアコンや空気清浄機等の家庭用電化製品、あるいは給湯装置や清浄機能付き便座等の操作装置にも適用可能であることは言うまでもない。
【0053】
また、上述した第1および第2実施形態において、ガイド表示データをディスプレイ5に表示する際に、ガイド表示データを半透明加工し、ディスプレイ5で現在表示中の画面に重ねて表示するようにしてもよい。こうすることによって、それまで操作していた状態を維持しながら(現在操作中の画面を見ながら)キー名称を確認することができるので、操作性を向上させることができる。
【符号の説明】
【0054】
HM 作業者
R ロボット
RC コントローラ
TP ティーチペンダント
1 ロボット制御システム
2 安全柵
4 非常停止スイッチ
5 ディスプレイ
6 操作部
7 ジョグダイヤル
8 操作キー
9 バス
12 通信インターフェース
13 CPU
14 RAM
16 ハードディスク
17 動作制御部
18 駆動指令部
19 ハードディスク
21 通信処理部
25 表示処理部
26 解釈実行部
27 ガイド情報
30 教示データ
32 通信インターフェース
33 CPU
34 RAM
36 ハードディスク
39 バス
41 通信処理部
45 表示制御部
46 キー入力監視部
51 第1領域
52 第2領域
【技術分野】
【0001】
本発明は、操作部および表示部を有した、例えば家庭用電化製品等を操作するための操作装置や、産業用ロボット等の可動機械の教示作業に用いる操作装置およびこの操作装置を有する可動機械制御システムに関するものである。
【背景技術】
【0002】
制御対象を操作する操作子としてのキーやボタンが複数設けられた操作部と、この操作部による操作結果やメッセージ等を表示する表示部とを備えた操作装置が公知である。例えば、空気清浄機のように、操作装置が制御対象としての本体に一体的に組み込まれたパターンのものがあれば、エアコンのように、操作装置が本体とは別体のリモコンとして切り離されたパターンのものもある。工作機械や産業ロボット等の加工分野においても同様であり、制御対象としての可動機械を操作するための操作部および表示部を有した操作装置が知られている。この操作装置はティーチペンダントとも呼ばれ、作業者が持ち運び可能な可搬式のスタイルが採用されることが多い(例えば、特許文献1、2参照)。
【0003】
上記操作装置においては、作業者が意図したとおりの作用・機能が発揮されるよう、各操作子の表面あるいは近傍には、その名称が識別可能に印字加工されている。例えば家庭用電化製品であれば、操作装置に配置されたプラスチック部材等からなる操作子に、直接印字加工されることが多い。工作機械であれば、複数の操作子の各々に対応する態様で意匠が描画されたキーシートを、操作部の全面が覆われるように貼付することが良く行われている。上記意匠部分は、エンボス部を形成するように加工されており、このエンボス部の表面または近傍の空白領域に操作子の名称が印字される。そして、エンボス部を押し下げたときに、キーシート直下の対応する操作子が押下されて操作を受け付けるようになっている。
【0004】
ここで、印字加工される操作子名称について説明する。例えば、データの記憶操作を受け付ける操作子には「記憶」の文字が、削除操作を受け付ける操作子には「削除」の文字が印字されている。この場合、日本人の作業者が操作装置を使う場合は問題がないが、外国人は理解することができない。そこで、外国に出荷される場合は、その出荷先で使用される言語に応じて操作子名称の印字内容を変更する(キーシートを採用している場合は異なる言語を印字したキーシートを貼付する)ことが行われている。しかしながら、各国の言語に応じて印字内容を変更するようにしたとしても、後述する課題を有している。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2001−88069号公報
【特許文献2】特開2002−91665号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
例えば、キー名称が英語で印字された米国出荷用の操作装置に対して、出荷前の品質確認作業や出荷後の設置作業等を日本人が行う場合は、慣れていない言語で表現された操作装置を操作する必要があるために、操作キーを識別するまでに多くの時間を要してしまう。ましてや、中国語、韓国語、タイ語、インド語等で印字された操作装置になると、全く理解することができない可能性が高くなるために、操作キーを識別するまでにさらに多くの時間を必要とする。
【0007】
そこで、本発明は、操作子の名称が出荷国に応じた第1言語で印字されている場合に、第1言語に精通していない他国語を使用する作業者であっても、各操作子の名称を容易に識別することができる操作装置を提供することを目的としている。また、この操作装置を用いた可動機械制御システムを提供することを目的としている。
【課題を解決するための手段】
【0008】
請求項1の発明は、制御対象を操作する操作装置であって、
前記制御対象を操作するための複数の操作子がレイアウトされるとともに、前記操作子の名称が第1言語で印字された操作部および前記操作子の入力に応じた画面が表示される表示部と、
前記操作子の各々の名称を前記第1言語とは異なる他言語でガイドするためのガイド情報を記憶する記憶手段と、
所定の操作を入力として前記ガイド情報を前記表示部に出力するガイド情報制御手段と、を備えたことを特徴とする操作装置である。
【0009】
請求項2の発明は、前記ガイド情報は、前記操作部を画像化した操作部画像データ内に描画された各々の操作子の名称を前記他言語で識別可能に付記したガイド表示データであり、
前記ガイド情報制御手段は、前記所定の操作がなされたときに前記ガイド表示データを前記表示部に出力することを特徴とする請求項1記載の操作装置である。
【0010】
請求項3の発明は、前記ガイド表示データは、複数の言語に各々対応して設けられていることを特徴とする請求項2記載の操作装置である。
【0011】
請求項4の発明は、前記記憶手段は、印字された前記第1言語を消去した態様で前記操作部を画像化した操作部画像データと、前記操作子の名称データおよびこの名称データの前記操作部画像データ上におけるレイアウト位置を示す名称レイアウト情報を関連付けた操作子名称テーブルとを記憶しており、
前記ガイド情報制御手段は、前記所定の操作がなされたときに、前記名称レイアウト情報に従って前記操作部画像データに前記名称データを重ね合わせてガイド表示データを生成し、このガイド表示データを前記表示部に出力することを特徴とする請求項1記載の操作装置である。
【0012】
請求項5の発明は、前記操作子名称テーブルは、複数の言語に各々対応して設けられていることを特徴とする請求項4記載の操作装置である。
【0013】
請求項6の発明は、前記ガイド情報制御手段は、前記第1言語とは異なる予め定めた第2言語の名称データを用いて前記ガイド表示データを生成することを特徴とする請求項3または請求項5記載の操作装置である。
【0014】
請求項7の発明は、前記表示部に表示された前記第2言語のガイド表示データを別の他言語に切り換えるための言語切換え手段を備えたことを特徴とする請求項6記載の操作装置である。
【0015】
請求項8の発明は、前記操作部画像データには、各々の操作子を識別するための識別IDがさらに描画されていることを特徴とする請求項2〜7のいずれか1項に記載の操作装置である。
【0016】
請求項9の発明は、前記ガイド情報制御手段は、前記ガイド表示データを半透明加工し、前記表示部で表示中の画面に重ねて表示することを特徴とする請求項3〜8のいずれか1項に記載の操作装置である。
【0017】
請求項10の発明は、請求項1〜9のいずれか1項に記載の操作装置と、前記制御対象としての可動機械と、この可動機械を制御するためのコントローラとが通信可能に接続されたことを特徴とする可動機械制御システムである。
【0018】
請求項11の発明は、前記記憶手段および前記ガイド情報制御手段は、前記コントローラに備えられていることを特徴とする請求項10記載の可動機械制御システムである。
【0019】
請求項12の発明は、可動機械を制御するためのコントローラと、このコントローラと通信可能に接続された操作装置とを有する可動機械制御システムにおいて、
前記操作装置は、前記可動機械を操作するための複数の操作子がレイアウトされるとともに、前記操作子の名称が第1言語で印字された操作部および前記操作子の入力に応じた画面が表示される表示部と、を有しており、
前記コントローラまたは前記操作装置の少なくともいずれか一方は、
印字された前記第1言語を消去した態様で前記操作部を画像化した操作部画像データと、前記操作子の各々に対応し前記第1言語とは異なる他言語で表現された名称、識別IDおよび前記操作部画像データ上の操作子レイアウト情報を関連付けた操作子テーブルとを記憶する記憶手段と、
所定の操作を入力として、前記名称を前記表示部の第1領域に出力し、前記操作部画像データを前記表示部の第2領域に出力する出力手段と、
前記第1領域に表示された名称の中からいずれか1つを選択する第1領域選択手段と、
前記第2領域で表示された複数の操作子の中からいずれか1つを選択する第2領域選択手段と、
前記第1領域および前記第2領域での互いの選択結果を前記識別IDおよび前記レイアウト情報に基づいて連動させるガイド情報制御手段と、を備えたことを特徴とする可動機械制御システムである。
【0020】
請求項13の発明は、前記表示部はタッチパネルからなり、前記第1領域における前記操作子の選択は、前記タッチパネルから得られた位置情報により行われることを特徴とする請求項12記載の可動機械制御システムである。
【発明の効果】
【0021】
本発明によれば、操作装置に備えられた操作子の名称が、作業者が普段使用する言語で表記されていない場合であっても、操作子の名称を容易に認識することができる。
【図面の簡単な説明】
【0022】
【図1】本発明に係る操作装置を産業用のロボット制御システムに組み込んだ場合の構成図である。
【図2】操作装置の一例としてのティーチペンダントTPの詳細な外観図である。
【図3】本発明の一実施形態としてのロボット制御システムの機能ブロック図である。
【図4】ガイド表示データがティーチペンダントのディスプレイに表示された様子を説明するための図である。
【図5】操作部を画像化した操作部画像データおよび名称レイアウト情報を説明するための図である。
【図6】キー名称を表示する領域と操作部画像データを表示する領域とを分けて表示した場合の画面例である。
【図7】キー名称、レイアウト情報等が関連付けられた操作キーテーブルを説明するための図である。
【発明を実施するための形態】
【0023】
発明の実施の形態を実施例に基づき図面を参照して説明する。
【0024】
[第1実施形態]
図1は、本発明に係る操作装置を産業用のロボット制御システムに組み込んだ場合の構成図である。同図に示すように、ロボット制御システム1は、アーク溶接、スポット溶接等の作業を行うロボットR、作業者HMが教示作業を行う際に用いる操作装置としてのティーチペンダントTP、そしてロボットRの動作制御を行うコントローラRCから大略構成される。
【0025】
ロボットRは、手首部先端にアーク溶接トーチ、スポット溶接ガン等の作業ツールが取り付けられており、安全柵2の内側領域に設置されている。
【0026】
ティーチペンダントTPは、各種データや操作結果を表示するディスプレイ5、およびロボットRの操作を行うため操作部6を備えている。操作部6には、ロボットRを手動操作により移動させるためのジョグ送りキー、ロボットRに対する教示データを記憶する記憶キー、教示データを削除する削除キー等の各種操作キーが備わっている。これらの操作キーが押下されると、操作信号として通信線CLを介してコントローラRCに送信される。コントローラRCは、操作信号に基づいてロボットRのジョグ送り操作、教示データの記憶等の各処理を行う。
【0027】
コントローラRCは、ティーチペンダントTPから送信される操作入力に従ってロボットRを制御したり教示データの記憶処理を行ったりする。また、外部から起動信号が入力されることにより教示データを再生する。この結果、ロボットRが自動運転される。
【0028】
図2は、ティーチペンダントTPの詳細な外観図である。同図に示すように、ティーチペンダントTPは、上述したディスプレイ5および操作部6以外に、ロボットRを緊急停止させる非常停止スイッチ4、メニュー等の選択操作を容易に行うための手段としてジョグダイヤル7を備えている。
【0029】
操作部6は、キーシートにより構成されており、キーシート上においては図示するような態様で複数の操作キー8がレイアウトされている。また、操作キー8の各々が有する作用や機能は、図形やアルファベット等の内容により識別できるよう、アイコンで表現されている。さらに、操作キー8を言語情報でも識別できるように、操作キー8の表面または近傍にキー名称が印字されている。キー名称は、使用される国の言語(第1言語)によって印字されている。例えば、日本国内で使用される操作装置の記憶キーであれば、「記憶」の概念が分かるアイコン表示に加えて、「記憶」の文字が印字されている。ディスプレイ5は、キー名称をガイドしたり確認したりするためのガイド情報を表示する。
【0030】
図3は、上述したロボット制御システム1の機能ブロック図である。以下、ティーチペンダントTPおよびコントローラRCについて、詳細に説明する。
【0031】
まず、ティーチペンダントTPについて説明する。ティーチペンダントTPは、上述した非常停止スイッチ4、ディスプレイ5および操作部6に加えて、CPU33、RAM34、通信インターフェース32、ROM35およびハードディスク36の各部を備えている。なお、各部はバス39を介して接続されている。
【0032】
CPU33は、中央演算処理装置であり、ROM35に格納されたソフトウェアプログラムを図示しないオペレーティングシステム上で実行する。CPU33は、ガイド情報制御手段に相当する。RAM34は、一時的な計算領域である。通信インターフェース32は、コントローラRCとの通信を行う。ROM35は、CPU33により実行されるソフトウェアプログラムや制御定数を記憶している。
【0033】
記憶手段としてのハードディスク36は、ガイド情報27を記憶している。ガイド情報27とは、操作キー8の各々の名称を、上述した第1言語とは異なる他の言語でガイドするためのデータのことであり、本実施例では、操作キー8の名称が印字されていない操作部6を画像化した操作部画像データに対して、各操作キー8の名称を識別可能に付記した静止画像を指している。このデータのことを、以下では、ガイド表示データと呼ぶ。このガイド情報表示データは、例えば、英語用、中国語用等、複数の言語に各々対応して設けられている。同時に表示できるデータは1つとしており、第1言語とは異なる言語(第2言語)に対応したガイド情報表示データを呼び出すことができる。上記第2言語とは、作業者が普段使う言語であり、予め定められている。
【0034】
ROM35は、上記各部を総括的に制御するための制御ソフトウェアとして、表示制御部45、キー入力監視部46および通信処理部41を備えている。表示制御部45は、ディスプレイ5に表示用データを表示する。キー入力監視部46は、操作部6からのキー入力を監視する。通信処理部41は、コントローラRCとの通信を制御する処理を行う。
【0035】
次に、コントローラRCについて説明する。コントローラRCは、CPU13、RAM14、ROM16、ハードディスク19、動作制御部17、駆動指令部18、ティーチペンダントTPと通信を行うための通信インターフェース12の各部を備えている。なお、各部はバス9を介して接続されている。
【0036】
CPU13は、中央演算処理装置であり、ROM15に格納されたソフトウェアプログラムを図示しないオペレーティングシステム上で実行する。RAM14は、一時的な計算領域である。通信インターフェース12は、ティーチペンダントTPとの通信を行う。ROM15は、CPU13により実行されるソフトウェアプログラムや制御定数を記憶している。ハードディスク16は、ティーチペンダントTPの操作により作成された教示データ30を記憶している。このハードディスク16に、操作キー8の各々の名称をガイドするためのガイド情報27を記憶するようにしてもよい。この場合、CPU13はガイド情報制御手段に相当し、ハードディスク16は記憶手段に相当することになる。
【0037】
ROM15は、上記各部を総括的に制御するための制御ソフトウェアとして、通信処理部21、表示処理部25および解釈実行部26およびを備えている。通信処理部21は、ティーチペンダントTPとの通信処理を行う。表示処理部25は、ティーチペンダントTPのディスプレイ5に表示する表示用データを生成する。解釈実行部26は、ハードディスク16に記憶された教示データ30を解釈して動作制御部17に動作制御信号を出力する。動作制御部17は、動作制御信号に基づいてロボットRの軌跡演算等を行い、演算結果を駆動信号として駆動指令部18に出力する。駆動指令部18は、ロボットRの各サーボモータを回転制御するためのサーボ制御信号を出力する。この結果、ロボットRが移動制御される。
【0038】
次に、ティーチペンダントTPの作用について説明する。ティーチペンダントTPの所定のキー操作またはメニューからガイド表示データの呼び出し操作が行われると、ガイド情報制御手段としてのCPU33は、ハードディスク36からガイド情報表示データを1つ読み出してディスプレイ5に出力する。
【0039】
図4は、ガイド表示データがティーチペンダントTPのディスプレイ5に表示された様子を説明するための図である。同図(a)に示すように、ガイド表示データの呼び出し操作が行われると、ガイド表示データがディスプレイ5に表示される。同図(b)は、ガイド表示データの一部分(同図(a)の○で囲んだ部分)を説明のために拡大した図である。操作部6に操作キー8の名称が普段使わない第1言語で印字されていても、同図(b)に示すように、ディスプレイ5には、操作キー8の名称が第2言語により識別可能に表示される。ガイド表示データは、ジョグダイヤル7の操作により拡大または縮小することができるようにしてもよい。
【0040】
以上説明したように、本発明の第1実施形態によれば、操作部6のキー名称が、作業者が普段使わない言語で印字されていたとしても、作業者が普段使う言語で表現されたガイド表示データをティーチペンダントTPに表示するようにしたことによって、作業者がキー名称を容易に識別することができる。また、ガイド表示データを複数の言語毎に対応して設けたことによって、作業者の使用言語に応じたフレキシブルな対応を取ることが可能になる。
【0041】
なお、上記実施形態において、表示されるガイド表示データは予め定めた1つの言語に対応したものとしたが、言語の切替メニューを備えておき、このメニューの操作によって表示するガイド表示データを切り替え可能に構成してもよい。
【0042】
[第2実施形態]
次に、本発明の第2実施形態について説明する。第1実施形態では、ディスプレイ5に表示するガイド表示データを、日本語用、英語用等、言語毎に複数設けた。しかしながら、言語毎にガイド表示データを複数設ける方式では、それだけ記憶容量を費やしてしまう。そこで、操作キー8の名称を付記する以前の操作部画像データと、言語情報とを別々に保存しておき、ガイド表示の操作要求があるタイミングで両者を合成してガイド表示データを作成し表示するというのが第2実施形態である。以下、第1実施形態との相違部分について説明する。
【0043】
図5は、操作部6を画像化した操作部画像データおよび名称レイアウト情報を説明するための図である。同図(a)は、操作キー8の名称が付記されていない操作部6を、そのまま静止画像化した操作部画像データを示している。同図(b)は、各操作キー8の識別ID(番号)、キー名称および操作部画像データ上のレイアウト座標値を管理している操作子名称テーブルである。レイアウト座標値とは、キー名称が、操作部画像データ内のどの位置に配置されるのかを示すデータであり、例えば、識別IDが「1」のキーであれば、(100,200)で表現される座標位置をキー名称の開始位置として描画処理される。上記操作部画像データおよび操作子名称テーブルは、ガイド情報27としてハードディスク36に記憶される。あるいは、コントローラRC側のハードディスク16に記憶するようにしても良い。
【0044】
次に、ティーチペンダントTPの作用について説明する。ティーチペンダントTPの所定のキー操作またはメニューからガイド表示データの呼び出し操作が行われると、ガイド情報制御手段としてのCPU33は、ハードディスク36から図5(a)で示した操作部画像データを読み出す。また、図5(b)で示した操作子名称テーブルを参照し、予め第2言語として定められた言語に応じたキー名称およびレイアウト座標値を全て読み出して、操作部画像データ上に描画処理を行う。そして、描画処理によって得られたガイド表示データをディスプレイ5に出力する。この結果、図4のような表示が行われる。なお、上記識別IDも併記するようにしてもよい。
【0045】
このように、第2実施形態では、操作部6を画像化した操作部画像データと、キー名称および操作部画像データ上におけるレイアウト位置を示す名称レイアウト情報を関連付けた操作子名称テーブルとを予め記憶しておき、所定の操作がなされたときに、操作部画像データにキー名称を重ね合わせてガイド表示データを生成し、ディスプレイ5に表示するようにした。このようにすることによって、言語毎にガイド表示データを持つのに比べて記憶容量を抑えることができる。
【0046】
また、キー名称に加えて識別IDも併記することにより、識別性をより向上させることができる。例えば、ティーチペンダントTPを操作する作業者の熟練度には個人差がある。実際の作業現場においては、熟練度の高い作業者が、操作に不慣れな作業者に対して、操作方法を指示することがある。不慣れな作業者の周囲に熟練した作業者がいない場合は、電話等の媒体を用いて熟練者が遠隔地から操作方法を伝達することがある。この場合、熟練者が指示した操作キーと不慣れな作業者が把握する操作キーとの間に誤解が生じる可能性がある。例えば、熟練者から記憶キーを押下する指示がなされたにも関わらず、記憶キーの場所が分からない作業者は、誤ったキーを押す可能性がある。これは、情報の伝達がキー名称という言語情報に頼っているから起こりえる。そこで、本発明においては、キー名称に加えて、数値などの識別IDを併記しておくことにより、例えば「1番のキー」という表現を用いて容易に操作方法を伝達することができる。
【0047】
[第3実施形態]
次に、本発明の第3実施形態について説明する。第1および第2実施形態では、操作部6の画像である操作部画像データにキー名称を付記したガイド表示データを言語毎に表示するよう構成した。第3実施形態では、ディスプレイ5をタッチパネルにより構成し、さらに、キー名称を表示する第1領域と操作部画像データを表示する第2領域とに分けて表示し、両表示領域を連動させるようにしている。以下、第2実施形態との相違部分について説明する。
【0048】
図6は、キー名称を表示する領域と操作部画像データを表示する領域とを分けて表示した場合の画面例を示している。同図に示すように、ディスプレイ5の表示は、第1領域51と第2領域52とに分割される。そして、第1領域51にはキー名称が一覧表示され、第2領域52には、操作部6のキー名称が消去された態様で画像化した操作部画像データが表示される。そして、第1領域51および第2領域52は、タッチ操作により、いずれか1つのキーを選択可能になっており、互いの選択結果は連動するようになっている。具体的には、A部の拡大図に示しているように、第1領域51で「エンター」キーを選択すると、B部の拡大図に示しているように、該当するエンターキーの意匠が第2領域52で選択された状態になる(例えば、図示するように、太枠や色つき枠等、識別可能な程度の装飾がなされた枠で囲まれる)。逆も同じであり、第2領域52で任意のキーを選択すると、該当するキーが第1領域51で選択された状態になる(例えば図示するように、反転表示される)。
【0049】
図7は、キー名称、レイアウト情報等が関連付けられた操作子テーブルを示している。同図に示すように、操作子テーブルでは、識別IDおよびキー名称に加えて、レイアウト情報としての座標値および選択枠サイズが定義されている。選択枠サイズとは、第1領域51で選択されたキー名称に対応する操作キーがどれに該当するかを識別可能に表示するための枠の大きさが定められている。例えば、上述した図6の「エンター」キーであれば、40×60ピクセルの大きさの枠であり、そのレイアウト位置は操作部画像データの(140、250)で表現される座標位置であることが定められている。
【0050】
上述した操作部画像データおよび操作子テーブルは、ガイド情報27としてコントローラRCのハードディスク16に予め記憶されている。そして、所定の操作が行われると、出力手段としてのCPU13は、操作部画像データおよび操作子テーブルを読み出して、通信I/F12、32を介してディスプレイ5の第1領域51にキー名称の一覧を出力し、第2領域52に操作部画像データを出力する。さらに、ティーチペンダントTPのCPU33は、タッチパネルから得られる位置情報に基づいて、どちらの領域でどのキーが選択されたかを識別し、コントローラRCへ通知する。ガイド情報制御手段としてのCPU13は、第1領域51または第2領域52での互いの選択結果を操作子テーブルの識別IDおよびレイアウト情報に基づいて連動させる。
【0051】
このように、第3実施形態では、操作部6のキー名称を消去した態様で画像化した操作部画像データと、キー名称、識別IDおよび操作キーのレイアウト情報を記憶しておき、所定の操作が行われると、ディスプレイ5の表示領域を、キー名称を表示する第1領域と、操作部画像データを表示する第2領域に分割して、それぞれを同時に表示する。そして、それぞれの領域での互いの選択結果を連動させる。こうすることによって、作業者は、各操作子の名称を容易に識別可能にすることができる。
【0052】
なお、上述した第1〜第3実施形態では、本発明に係る操作装置を産業用のロボット制御システムに組み込んだ形態を示したが、本発明は、上記各実施形態に限定されるものではない。本発明に係る操作装置の技術思想は、表示部及び操作部を有する、エアコンや空気清浄機等の家庭用電化製品、あるいは給湯装置や清浄機能付き便座等の操作装置にも適用可能であることは言うまでもない。
【0053】
また、上述した第1および第2実施形態において、ガイド表示データをディスプレイ5に表示する際に、ガイド表示データを半透明加工し、ディスプレイ5で現在表示中の画面に重ねて表示するようにしてもよい。こうすることによって、それまで操作していた状態を維持しながら(現在操作中の画面を見ながら)キー名称を確認することができるので、操作性を向上させることができる。
【符号の説明】
【0054】
HM 作業者
R ロボット
RC コントローラ
TP ティーチペンダント
1 ロボット制御システム
2 安全柵
4 非常停止スイッチ
5 ディスプレイ
6 操作部
7 ジョグダイヤル
8 操作キー
9 バス
12 通信インターフェース
13 CPU
14 RAM
16 ハードディスク
17 動作制御部
18 駆動指令部
19 ハードディスク
21 通信処理部
25 表示処理部
26 解釈実行部
27 ガイド情報
30 教示データ
32 通信インターフェース
33 CPU
34 RAM
36 ハードディスク
39 バス
41 通信処理部
45 表示制御部
46 キー入力監視部
51 第1領域
52 第2領域
【特許請求の範囲】
【請求項1】
制御対象を操作する操作装置であって、
前記制御対象を操作するための複数の操作子がレイアウトされるとともに、前記操作子の名称が第1言語で印字された操作部および前記操作子の入力に応じた画面が表示される表示部と、
前記操作子の各々の名称を前記第1言語とは異なる他言語でガイドするためのガイド情報を記憶する記憶手段と、
所定の操作を入力として前記ガイド情報を前記表示部に出力するガイド情報制御手段と、を備えたことを特徴とする操作装置。
【請求項2】
前記ガイド情報は、前記操作部を画像化した操作部画像データ内に描画された各々の操作子の名称を前記他言語で識別可能に付記したガイド表示データであり、
前記ガイド情報制御手段は、前記所定の操作がなされたときに前記ガイド表示データを前記表示部に出力することを特徴とする請求項1記載の操作装置。
【請求項3】
前記ガイド表示データは、複数の言語に各々対応して設けられていることを特徴とする請求項2記載の操作装置。
【請求項4】
前記記憶手段は、印字された前記第1言語を消去した態様で前記操作部を画像化した操作部画像データと、前記操作子の名称データおよびこの名称データの前記操作部画像データ上におけるレイアウト位置を示す名称レイアウト情報を関連付けた操作子名称テーブルとを記憶しており、
前記ガイド情報制御手段は、前記所定の操作がなされたときに、前記名称レイアウト情報に従って前記操作部画像データに前記名称データを重ね合わせてガイド表示データを生成し、このガイド表示データを前記表示部に出力することを特徴とする請求項1記載の操作装置。
【請求項5】
前記操作子名称テーブルは、複数の言語に各々対応して設けられていることを特徴とする請求項4記載の操作装置。
【請求項6】
前記ガイド情報制御手段は、前記第1言語とは異なる予め定めた第2言語の名称データを用いて前記ガイド表示データを生成することを特徴とする請求項3または請求項5記載の操作装置。
【請求項7】
前記表示部に表示された前記第2言語のガイド表示データを別の他言語に切り換えるための言語切換え手段を備えたことを特徴とする請求項6記載の操作装置。
【請求項8】
前記操作部画像データには、各々の操作子を識別するための識別IDがさらに描画されていることを特徴とする請求項2〜7のいずれか1項に記載の操作装置。
【請求項9】
前記ガイド情報制御手段は、前記ガイド表示データを半透明加工し、前記表示部で表示中の画面に重ねて表示することを特徴とする請求項3〜8のいずれか1項に記載の操作装置。
【請求項10】
請求項1〜9のいずれか1項に記載の操作装置と、前記制御対象としての可動機械と、この可動機械を制御するためのコントローラとが通信可能に接続されたことを特徴とする可動機械制御システム。
【請求項11】
前記記憶手段および前記ガイド情報制御手段は、前記コントローラに備えられていることを特徴とする請求項10記載の可動機械制御システム。
【請求項12】
可動機械を制御するためのコントローラと、このコントローラと通信可能に接続された操作装置とを有する可動機械制御システムにおいて、
前記操作装置は、前記可動機械を操作するための複数の操作子がレイアウトされるとともに、前記操作子の名称が第1言語で印字された操作部および前記操作子の入力に応じた画面が表示される表示部と、を有しており、
前記コントローラまたは前記操作装置の少なくともいずれか一方は、
印字された前記第1言語を消去した態様で前記操作部を画像化した操作部画像データと、前記操作子の各々に対応し前記第1言語とは異なる他言語で表現された名称、識別IDおよび前記操作部画像データ上の操作子レイアウト情報を関連付けた操作子テーブルとを記憶する記憶手段と、
所定の操作を入力として、前記名称を前記表示部の第1領域に出力し、前記操作部画像データを前記表示部の第2領域に出力する出力手段と、
前記第1領域に表示された名称の中からいずれか1つを選択する第1領域選択手段と、
前記第2領域で表示された複数の操作子の中からいずれか1つを選択する第2領域選択手段と、
前記第1領域および前記第2領域での互いの選択結果を前記識別IDおよび前記レイアウト情報に基づいて連動させるガイド情報制御手段と、を備えたことを特徴とする可動機械制御システム。
【請求項13】
前記表示部はタッチパネルからなり、前記第1領域における前記操作子の選択は、前記タッチパネルから得られた位置情報により行われることを特徴とする請求項12記載の可動機械制御システム。
【請求項1】
制御対象を操作する操作装置であって、
前記制御対象を操作するための複数の操作子がレイアウトされるとともに、前記操作子の名称が第1言語で印字された操作部および前記操作子の入力に応じた画面が表示される表示部と、
前記操作子の各々の名称を前記第1言語とは異なる他言語でガイドするためのガイド情報を記憶する記憶手段と、
所定の操作を入力として前記ガイド情報を前記表示部に出力するガイド情報制御手段と、を備えたことを特徴とする操作装置。
【請求項2】
前記ガイド情報は、前記操作部を画像化した操作部画像データ内に描画された各々の操作子の名称を前記他言語で識別可能に付記したガイド表示データであり、
前記ガイド情報制御手段は、前記所定の操作がなされたときに前記ガイド表示データを前記表示部に出力することを特徴とする請求項1記載の操作装置。
【請求項3】
前記ガイド表示データは、複数の言語に各々対応して設けられていることを特徴とする請求項2記載の操作装置。
【請求項4】
前記記憶手段は、印字された前記第1言語を消去した態様で前記操作部を画像化した操作部画像データと、前記操作子の名称データおよびこの名称データの前記操作部画像データ上におけるレイアウト位置を示す名称レイアウト情報を関連付けた操作子名称テーブルとを記憶しており、
前記ガイド情報制御手段は、前記所定の操作がなされたときに、前記名称レイアウト情報に従って前記操作部画像データに前記名称データを重ね合わせてガイド表示データを生成し、このガイド表示データを前記表示部に出力することを特徴とする請求項1記載の操作装置。
【請求項5】
前記操作子名称テーブルは、複数の言語に各々対応して設けられていることを特徴とする請求項4記載の操作装置。
【請求項6】
前記ガイド情報制御手段は、前記第1言語とは異なる予め定めた第2言語の名称データを用いて前記ガイド表示データを生成することを特徴とする請求項3または請求項5記載の操作装置。
【請求項7】
前記表示部に表示された前記第2言語のガイド表示データを別の他言語に切り換えるための言語切換え手段を備えたことを特徴とする請求項6記載の操作装置。
【請求項8】
前記操作部画像データには、各々の操作子を識別するための識別IDがさらに描画されていることを特徴とする請求項2〜7のいずれか1項に記載の操作装置。
【請求項9】
前記ガイド情報制御手段は、前記ガイド表示データを半透明加工し、前記表示部で表示中の画面に重ねて表示することを特徴とする請求項3〜8のいずれか1項に記載の操作装置。
【請求項10】
請求項1〜9のいずれか1項に記載の操作装置と、前記制御対象としての可動機械と、この可動機械を制御するためのコントローラとが通信可能に接続されたことを特徴とする可動機械制御システム。
【請求項11】
前記記憶手段および前記ガイド情報制御手段は、前記コントローラに備えられていることを特徴とする請求項10記載の可動機械制御システム。
【請求項12】
可動機械を制御するためのコントローラと、このコントローラと通信可能に接続された操作装置とを有する可動機械制御システムにおいて、
前記操作装置は、前記可動機械を操作するための複数の操作子がレイアウトされるとともに、前記操作子の名称が第1言語で印字された操作部および前記操作子の入力に応じた画面が表示される表示部と、を有しており、
前記コントローラまたは前記操作装置の少なくともいずれか一方は、
印字された前記第1言語を消去した態様で前記操作部を画像化した操作部画像データと、前記操作子の各々に対応し前記第1言語とは異なる他言語で表現された名称、識別IDおよび前記操作部画像データ上の操作子レイアウト情報を関連付けた操作子テーブルとを記憶する記憶手段と、
所定の操作を入力として、前記名称を前記表示部の第1領域に出力し、前記操作部画像データを前記表示部の第2領域に出力する出力手段と、
前記第1領域に表示された名称の中からいずれか1つを選択する第1領域選択手段と、
前記第2領域で表示された複数の操作子の中からいずれか1つを選択する第2領域選択手段と、
前記第1領域および前記第2領域での互いの選択結果を前記識別IDおよび前記レイアウト情報に基づいて連動させるガイド情報制御手段と、を備えたことを特徴とする可動機械制御システム。
【請求項13】
前記表示部はタッチパネルからなり、前記第1領域における前記操作子の選択は、前記タッチパネルから得られた位置情報により行われることを特徴とする請求項12記載の可動機械制御システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−111663(P2013−111663A)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2011−257134(P2011−257134)
【出願日】平成23年11月25日(2011.11.25)
【出願人】(000000262)株式会社ダイヘン (990)
【Fターム(参考)】
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成23年11月25日(2011.11.25)
【出願人】(000000262)株式会社ダイヘン (990)
【Fターム(参考)】
[ Back to top ]