
歩行データ計測装置
【課題】歩行データを精度良く計測する。
【解決手段】計測装置10は、接地センサ14、24、走査型光学距離センサ(LRF)12、受光器22a、22b、演算ユニット18を備える。LRF12は、測距用照射光の強さを変化させることによって照射光に情報を含ませることができる。各受光器は、受光した照射光に含まれている情報を読み取ることができる。計測装置10は、接地センサが接地を検知している間、LRFが照射方向を示す照射方向情報を含ませた照射光を照射して各照射方向における距離を計測する。次いで、各受光器が、受光した照射光に含まれている照射方向情報、及び、自己を識別するための受光器識別子を演算ユニットへ送信する。演算ユニットは、受光器識別子と照射方向情報と各照射方向の計測距離から一方の足に対する各受光器の方向と距離を算出し、各受光器の方向と距離から2つの足の相対位置を算出する。
【解決手段】計測装置10は、接地センサ14、24、走査型光学距離センサ(LRF)12、受光器22a、22b、演算ユニット18を備える。LRF12は、測距用照射光の強さを変化させることによって照射光に情報を含ませることができる。各受光器は、受光した照射光に含まれている情報を読み取ることができる。計測装置10は、接地センサが接地を検知している間、LRFが照射方向を示す照射方向情報を含ませた照射光を照射して各照射方向における距離を計測する。次いで、各受光器が、受光した照射光に含まれている照射方向情報、及び、自己を識別するための受光器識別子を演算ユニットへ送信する。演算ユニットは、受光器識別子と照射方向情報と各照射方向の計測距離から一方の足に対する各受光器の方向と距離を算出し、各受光器の方向と距離から2つの足の相対位置を算出する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、一方の足に対する他方の足の相対位置を計測する技術に関する。
【背景技術】
【0002】
歩行動作の解析や評価のため、或いは歩行補助装置のセンサとして、歩行時や走行時の歩幅や進行方向、或いは速度などの歩行データを取得したいという要求がある。本明細書における歩行データは、一方の足に対する他方の足の相対位置と相対角度を意味する。もちろんそれ以外のデータを含んでいてもよい。本明細書では、簡単のため、2つの足の相対位置と相対角度を合わせて相対位置と称する。歩行データを取得する装置が、例えば特許文献1や特許文献2に開示されている。
【0003】
特許文献1の技術では、左右の靴にジャイロを搭載し、ジャイロの計測値から歩行データを算出する。特許文献2の技術では、一方の靴から他方の靴へ向けてグレイコードを照射し、他方の靴で受光したグレイコードの光の強度から、両足の相対距離を算出して歩行データを生成する。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−73285号公報
【特許文献2】特開2004−170166号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ジャイロが検出するのは加速度や速度であるから、それらのデータから両足の相対位置を算出するのでは精度が低い。グレイコードの光を用いる場合は、環境光の影響を受け易い。本発明は、上記課題に鑑み、従来の方法とは異なる方法で歩行データを精度良く計測する技術を提供する。
【課題を解決するための手段】
【0006】
距離を正確に計測するのに適した距離センサとして、走査型光学距離センサがある。走査型光学距離センサの典型は、レーザレンジファインダ(Laser Range Finder)であり、それは、レーザ光を1次元、或いは2次元的に走査しながら各方向の距離を計測する。歩行データを計測する一つの手法として、一方の足に走査型光学距離センサを配置し、他方の足の相対位置を計測することが考えられる。しかし、足は形状が複雑であるため、相対位置を正確に計測するには、足の特定の2点までの距離を正確に計測する必要がある。なお2点の距離計測が必要とされるのは、一方の足に対する他方の足の相対的な角度を決定するためである。以下では簡単のため、走査型光学距離センサを単に「LRF」と称することがある。
【0007】
本発明は、一方の足にLRFを配置するとともに他方の足にLRFの照射光を受光する複数の受光器を配置し、受光器が照射光を受光したときのその照射光によってLRFから受光器までの距離を正確に計測し、計測された距離を使って歩行データを算出する、という技術的思想に基づく。LRFと受光器の配置位置は予め正確に解っているから、それらの間の計測距離から両足の正確な相対位置(相対角度を含む)を求めることができる。さらに本発明は、一つのLRFが複数の受光器までの距離を計測した際、計測されたそれぞれの距離がいずれの受光器までの距離であるかを判別する仕組みを有することを特徴とする。
【0008】
本明細書が開示する一つの歩行データ計測装置は、接地センサと、LRFと、複数の受光器と、演算ユニットを備える。接地センサは、それぞれの足に取り付けられる。本発明は、測距のための照射光の強さを変化させることによって照射光に情報を含ませることができるLRFを採用する。LRFは、一方の足に取り付けられる。各受光器は、LRFの照射光を受光し、その照射光に含まれている情報を読み取ることができる。複数の受光器は、他方の足に取り付けられる。
【0009】
この歩行データ計測装置は、次のとおりに歩行データを計測する。まず、接地センサが接地を検知している間に、走査型光学距離センサが照射光の照射方向を示す照射方向情報を含ませた照射光を、照射方向を連続的に変えながら照射して各照射方向における距離を計測する。次いで、接地センサが接地を検知している間に各受光器が、受光した照射光に含まれている照射方向情報を読み取り、読み取った照射方向情報と自己を識別するための受光器識別子を演算ユニットへ送信する。そして、演算ユニットが、受信した受光器識別子と照射方向情報、及び、走査型光学距離センサが計測した各照射方向の計測距離から一方の足に対する各受光器の方向と距離を算出し、各受光器の方向と距離から2つの足の相対位置(相対角度を含む)を算出する。
【0010】
上記の歩行データ計測装置では、受光器が受光した照射光の照射方向が、その照射光に含まれている照射方向情報によって特定される。この照射方向情報によって、LRFが計測した照射方向別の計測距離群の中から受光器までの距離を特定することができる。なお、各受光器は自己を識別する受光器識別子を発信しているので、一つのLRFが計測した照射方向別の計測距離群から夫々の受光器までの距離を特定することができる。受光器の取り付け位置とLRFの取り付け位置は既知であるので、LRFから夫々の受光器までの正確な距離から、一方の足に対する他方の足の正確な相対位置(相対角度を含む)を特定することができる。
【0011】
上記の歩行データ計測装置では、照射光に照射方向情報を含ませる。照射方向情報の精度が高くない場合には、上記歩行データ計測装置を変形した次の歩行データ計測装置が好適である。即ち、本明細書が開示する他の歩行データ計測装置は、夫々の足に取り付けられる接地センサと、一方の足に取り付けられる複数のLRF(走査型光学距離センサ)と、他方の足に取り付けられる複数の受光器と、演算ユニットを備える。この歩行データ計測装置が採用するLRFも、測距のための照射光の強さを変化させることによって照射光に情報を含ませることができる。また、この歩行データ計測装置の受光器もまた、受光した照射光に含まれている情報を読み取ることができる。
【0012】
この歩行データ計測装置は、次のとおりに歩行データを計測する。まず、両足の接地センサが接地を検知している間に各LRFが自己を識別するためのセンサ識別子を含ませた照射光を照射方向を連続的に変えながら照射する。そして、各照射方向における距離を計測する。接地センサが接地を検知している間に、各受光器が受光した照射光に含まれているセンサ識別子、及び、自己を識別するための受光器識別子を演算ユニットへ送信する。演算ユニットが、センサ識別子を受信したタイミングにおけるそのセンサ識別子によって識別されるLRFの計測距離を、そのセンサ識別子とともに受信した受光器識別子によって識別される受光器までの距離として特定する。そして、特定された各受光器の各LRFに対する相対距離から2つの足の相対位置(相対角度を含む)を算出する。
【0013】
この歩行データ計測装置は、複数のLRFが夫々の受光器までの距離を計測する。LRFの照射光に含まれているセンサ識別子によって、各受光器が受光した照射光がいずれのLRFから照射されたものであるかが判別できる、2つのLRF夫々からの距離が分かれば、受光器の位置が決定できる。2つの受光器の位置が決定できれば、一方の足に対する他方の足の相対位置(相対角を含む)を決定することができる。
【0014】
LRF、受光器、及び、接地センサは、ユーザが履く靴に内蔵するのが好適である。演算ユニットは、LRFとともに靴に内蔵してもよいし、独立したユニットとして腰などに取り付けるものであってもよい。また、他方の足に取り付ける受光器の数は、少なくとも2個であればよい。
【発明の効果】
【0015】
本発明によれば、一方の足に取り付けられたLRFから他方の足に取り付けられた各受光器までの距離が正確に計測できる。LRFから各受光器までの正確な距離から正確な歩行データを得ることができる。
【図面の簡単な説明】
【0016】
【図1】第1実施例の歩行データ計測装置の模式的ブロック図である。
【図2】第1実施例の歩行データ計測装置が実行する処理のフローチャート図である。
【図3】第2実施例の歩行データ計測装置の模式的ブロック図である。
【図4】第2実施例の歩行データ計測装置が実行する処理のフローチャート図である。
【実施例1】
【0017】
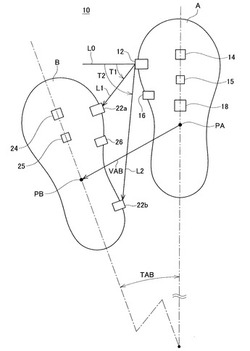
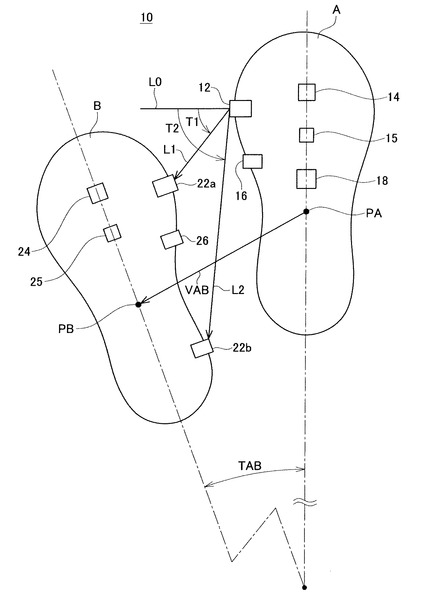
図1と図2を用いて第1実施例の歩行データ計測装置10を説明する。本実施例の歩行データ計測装置10は、ユーザが履く靴の靴底に内蔵されている。図1は、歩行データ計測装置10の模式的ブロック図である。図1は、靴底の模式的平面断面図として、歩行データ計測装置10のブロック図を表している。図2は、歩行データ計測装置10が実行する処理のフローチャート図を示している。図1の右側に描かれた靴(右の靴)を靴Aと称し、左側に描かれた靴(左の靴)を靴Bと称する。
【0018】
靴Aは、走査型光学距離センサ12、接地センサ14、ジャイロ15、通信器16、及び、演算ユニット18を内蔵している。靴Bは、2つの受光器22a、22b、接地センサ24、ジャイロ25、及び、通信器26を内蔵している。簡単のため実施例の説明においても「走査型光学距離センサ12」を「LRF12」と称する。
【0019】
図1の符号PAは、靴Aの予め決められた位置を示しており、点PAの位置によって靴Aの位置が表される。同様に、符号PBは靴Bの予め決められた位置を示しており、点PBの位置によって靴Bの位置が表される。符号VABは点PAから点PBへのベクトルを示しており、ベクトルVABが靴Bの靴Aに対する相対位置を表している。また、符号TABが、靴Aに対する靴Bの相対回転角を示している。本実施例では、ベクトルVABと角度TABを合わせて靴Bの靴Aに対する「相対位置」と称する。この「相対位置」が歩行データに相当する。
【0020】
LRF12は、照射方向を連続的に変えながらレーザ光(照射光)を照射し、照射光と反射光の時間差、あるいは位相差から照射方向に存在する物体までの距離を計測する。別言すれば、LRF12は、レーザ光を走査しながら予め決められた角度範囲(走査範囲)内に存在する対象物までの距離を計測する。さらにLRF12は、レーザ光を複数のパルス波として出力することができ、そのパルス波によって照射光にデジタルデータを含ませることができる。パルス波は光の強弱によって実現されるので、別言すれば、LRF12は、レーザ光の強さ変化させることによってレーザ光にデジタルデータ(情報)を含ませることができる。例えば、レーザ光の最初の1パルスは毎回同じであり、照射光と反射光に含まれるこの最初のパルスによって距離を計測する。距離計測用の最初のパルスに続く一群のパルスでデジタルデータを表す。
【0021】
本実施例のLRF12は、照射方向を示す照射方向情報をレーザ光に含ませる。照射方向情報は、図1に示すように、LRF12からその前方へ伸びる基準線L0と照射方向がなす角度で表される。例えば、直線L1で示される照射方向は角度T1であり、直線L2で示される照射方向は角度T2である。LRF12は、例えば角度1度単位で照射方向を変えながら各照射方向に存在する物体までの距離を計測する。即ち、照射方向を変える毎に、そのレーザ光に含まれる照射方向情報も変わる。各照射方向の計測距離は、演算ユニット18へ送られる。
【0022】
LRF12は、靴Aのインサイド(ユーザが履いたときに他方の靴Bと対向する側面)に取り付けられており、他方の靴Bに向かってレーザ光を走査するように配置されている。即ちLRF12は、他方の靴Bまでの距離を計測する。
【0023】
靴Bのインサイドには2つの受光器22a、22bが取り付けられている。これらの受光器は、LRF12のレーザ光を検知する。また、各受光器22a、22bは、受光したレーザ光に含まれているデジタルデータを読み取ることができる。受光器22a、22bには、それぞれ固有の識別子(受光器識別子)が与えられている。受光器22a、22bのそれぞれは、レーザ光を受光するとそのレーザ光に含まれている照射方向情報と自己の受光器識別子を演算ユニット18へ送信する。なお、LRF12は、受光器22a、22bに限らず、レーザ光が照射された対象物までの距離を計測することができることができる点に留意されたい。すなわち、LRF12は、靴Bのインサイドの各点までの距離を計測する。実施例の歩行データ計測装置10は、後述するように、LRF12が計測した照射方向毎の距離のうち、いずれの照射方向の計測距離が受光器22a又は22bまでの距離であるかを確実に判別することができる。多数の方向の計測距離群の中から各受光器22a、22bまでの距離を選別できる点にこの歩行データ計測装置10の特徴がある。
【0024】
それぞれの靴の裏には接地センサ14、24が取り付けられている。接地センサ14、24は、歪ゲージや感圧素子、或いは単純接点等で構成されており、歪ゲージ等の出力によって靴が接地しているか否かを判別する。
【0025】
ジャイロ15は、靴Aの鉛直線周りの回転角速度を計測する。演算ユニット18は、角速度を積分し、靴Aの鉛直線周りの回転角を算出する。ジャイロ25は、靴Bの鉛直線周りの回転角速度を計測する。演算ユニット18は、角速度を積分し、靴Bの鉛直線周りの回転角を算出する。
【0026】
符号16と26は赤外線を使った通信器であり、照射方向情報と受光器識別子を、靴Bに内蔵された受光器22a、22bから靴Aに内蔵された演算ユニット18へ送信する機能を果たす。また、靴Bに内蔵された接地センサ24の出力も、通信器16、26を介して演算ユニット18へ送られる。
【0027】
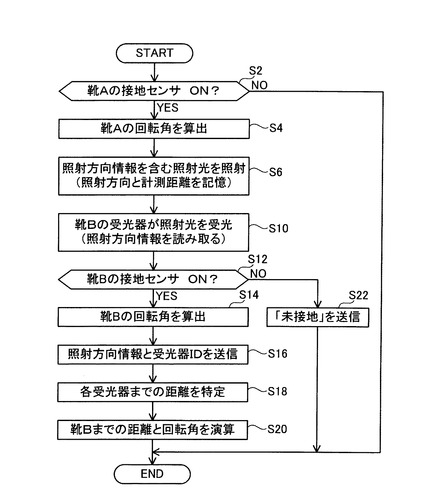
図2のフローチャートを参照して、歩行データ計測装置10が実行する処理を説明する。図2の処理は、歩行中の歩幅と歩行方向を計測する処理である。図2の処理は、1歩行ステップ毎に実行される。歩行データ計測装置10は、靴A(LRF12を内蔵している靴)が接地しているか否かを、接地センサ14によって判断する(S2)。靴Aが接地していなければ(S2:NO)、処理を終了する。靴Aが接地している場合(S2:YES)、演算ユニット18は、ジャイロ15が検出する角速度に基づいて、靴Aの回転角を算出する(S4)。演算ユニット18はステップS4において、前回の歩行ステップにおける処理から現在までのジャイロ15の出力(角速度)を時間軸に沿って積分して靴Aの回転角を算出する。即ち、ステップS4では、一歩の間の靴Aの回転角が算出される。
【0028】
次に、歩行データ計測装置10は、LRF12を動作させる(S6)。LRF12は、靴Bだけでなく、走査範囲内に存在する物体全ての距離を計測する。LRF12は、前述したように、走査範囲内で、レーザ光の照射方向を連続的に変えながら、各照射方向に存在する物体までの距離を計測する。LRF12単体では、距離計測の対象が何であるかは判別できないことに留意されたい。レーザ光の照射方向とその方向の計測距離は、演算ユニット18に送られて記憶される。また、前述したように、照射方向毎の各レーザ光には、そのレーザ光の照射方向を示す照射方向情報が含まれる。
【0029】
他方、靴Bに内蔵されている受光器22aと22bは、LRF12が照射したレーザ光を受光する(S10)。夫々の受光器22a、22bが受光するレーザ光は、別の照射方向を向いていることに留意されたい。図1の例では、受光器22aは照射角度(照射方向)T1のレーザ光を受光し、受光器22bは照射角度(照射方向)T2のレーザ光を受光する。それぞれの受光器22a、22bは、受光したレーザ光に含まれている照射方向情報を読み取る。受光器22aが受光したレーザ光には照射角度T1を示すデータが含まれており、受光器22bが受光したレーザ光には照射角度T2を示すデータが含まれている。
【0030】
歩行データ計測装置10は、受光器22a、22bがレーザ光を受光したときに靴Bが接地していない場合には(S12:NO)、靴Bが未接地である旨を演算ユニット18へ送信する(S22)。このとき、受光したデータは破棄される。靴Bの受光器22a、22bから靴Aの演算ユニット18へのデータ通信は、通信器16、26を介して行われる。靴Bが未接地である旨のデータを受信した演算ユニット18は処理を終了する。
【0031】
他方、靴Bが接地している場合(S12:YES)、演算ユニット18は、ジャイロ25が検出する角速度に基づいて、靴Bの回転角を算出する(S14)。演算ユニット18はステップS14において、前回の歩行ステップにおける処理から現在までのジャイロ25の出力(角速度)を時間軸に沿って積分して靴Bの回転角を算出する。即ち、ステップS14では、一歩の間の靴Bの回転角が算出される。ジャイロ25が検出した角速度も、通信器16、26を介して演算ユニット18へ送られる。
【0032】
次に歩行データ計測装置10は、それぞれの受光器22a、22bが受光したレーザ光に含まれている照射方向情報と自己の受光器識別子を演算ユニット18へ送信する(S16)。なお、図2における「受光器ID」が受光器識別子に相当する。図1の例では、受光器22aは、照射角度(照射情報)T1を示すデータと、自己の受光器識別子を演算ユニット18へ送信する。受光器22bは、照射角度(照射情報)T2を示すデータと、自己の受光器識別子を演算ユニット18へ送信する。
【0033】
演算ユニット18は、受信した照射方向情報と受光器識別子と、既に記憶している照射方向毎の計測距離から、LRF12を基準とした各受光器の方向と距離を求める。即ち、図1のベクトルL1(LRF12から受光器22aへのベクトル)と、ベクトルL2(LRF12から受光器22bへのベクトル)が求まる。LRF12と点PAの相対位置、及び、各受光器22a、22bと点PBの相対位置は予め分かっているので、ベクトルL1とL2から、ベクトルVABと角度TAB、即ち、靴Bの靴Aに対する相対位置(相対角度)が算出できる。演算ユニット18は、算出された相対位置とそれぞれの靴の回転角を記憶する。こうして、1歩行ステップにおける歩行データが取得される。歩行データ計測装置10は、1歩行ステップ毎に上記の処理を繰り返す。
【実施例2】
【0034】
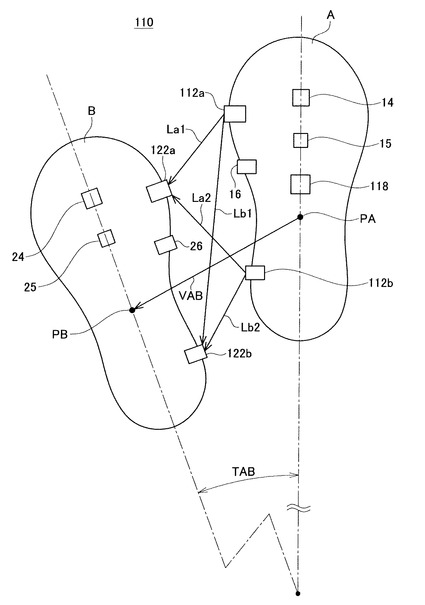
次に、図3を参照して第2実施例の歩行データ計測装置110を説明する。第2実施例の歩行データ計測装置110は、靴Aに2つのLRF112a、112bを内蔵している。その他は第1実施例の歩行データ計測装置10と同じである。各LRF112a、112bは、照射するレーザ光に、自己を識別するためのセンサ識別子を含ませる。この点が、第1実施例の歩行データ計測装置10と異なる点である。また、第2実施例の歩行データ計測装置110は、照射方向情報を使わない。
【0035】
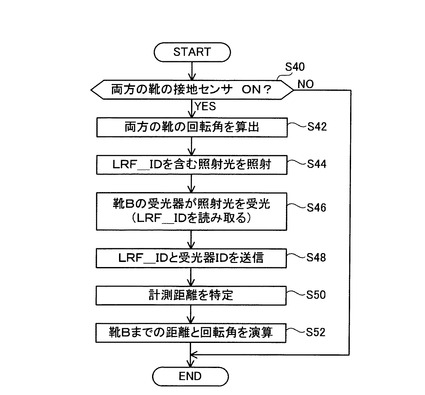
歩行データ計測装置110が実行する処理のフローチャートを図4に示す。本実施例の歩行データ計測装置110は、両足の接地センサ14、24が共に接地を検出している場合に以下の処理を実行する(S40:YES)。ステップS42では、夫々の靴のジャイロ15、25のデータ(角速度)から、それぞれの靴の回転角を算出する(S42)。次に、ステップS44では、各LRF112a、112bが、走査範囲内に存在する物体全ての距離を計測する。このとき各LRF112a、112bは、照射するレーザ光に、自己を識別するためのセンサ識別子を含ませる。図4では、センサ識別子を記号「LRF_ID」で表している。
【0036】
受光器122a、122bはそれぞれ、LRF112a、112bが照射したレーザ光を受光する(S46)。各受光器は、レーザ光を受光すると直ちにレーザ光に含まれているセンサ識別子を読み取るとともに、読み取ったセンサ識別子と自己を識別するための受光器識別子を演算ユニット118へ送る(S48)。演算ユニット118は、センサ識別子を受信したタイミングにおけるそのセンサ識別子が示すLRFの計測距離を、受光器識別子が示す受光器までの計測距離として特定する(S50)。図3の例では、受光器122aがLRF112aのレーザ光を受光したとき、演算ユニット118は、受光器122aの識別子とともにLRF112aのセンサ識別子を受信する。受信したタイミングにおけるLRF112aの計測距離が、符号La1で示される距離である。また受光器122aがLRF112bのレーザ光を受光したとき、演算ユニット118は、受光器122aの識別子とともにLRF112bのセンサ識別子を受信する。受信したタイミングにおけるLRF112bの計測距離が、符号La2で示される距離である。さらに受光器122bがLRF112aのレーザ光を受光したとき、演算ユニット118は、受光器122bの識別子とともにLRF112aのセンサ識別子を受信する。受信したタイミングにおいてLRF112aが計測した距離が、符号Lb1で示される距離である。同様に、受光器122bがLRF112bのレーザ光を受光したとき、演算ユニット118は、受光器122bの識別子とともにLRF112bのセンサ識別子を受信する。受信したタイミングにおいてLRF112bが計測した距離が、符号Lb2で示される距離である。
【0037】
こうして、演算ユニット118は、LRF112aと受光器122aの間の距離La1、LRF112bと受光器122aの間の距離La2、LRF112aと受光器122bの間の距離Lb1、LRF112bと受光器122bの間の距離Lb2を特定する。
【0038】
靴A上の2点(2つのLRFの位置)から受光器122aまでの2つの距離La1、La2によって、靴A(点PA)に対する受光器122aまでの距離と方向が算出される。同様に、靴A上の2点から受光器122bまでの2つの距離Lb1、Lb2によって、靴A(点PA)に対する受光器122bまでの距離と方向が算出される。受光器122aと122bの相対位置と方向から、ベクトルVABと角度TAB、即ち、靴Bの靴Aに対する相対位置(相対角度含む)が算出される。演算ユニット118は、算出された相対位置とそれぞれの靴の回転角を記憶する。こうして、1歩行ステップの歩行データが取得される。歩行データ計測装置110は、1歩行ステップ毎に上記の処理を繰り返す。
【0039】
第2実施例の歩行データ計測装置110は、LRFの照射方向情報を用いない。歩行データ計測装置110は、LRFの照射方向の精度が低い場合に有効である。
【0040】
実施例の歩行データ計測装置はいずれも、それぞれの受光器がレーザ光(距離計測用の照射光)を受光したときに照射光に含まれる情報とともに自己の受光器識別子を演算ユニットへ送る。このことが、LRFが計測した距離がいずれの受光器までの距離であるかを判別するのに役立っている。実施例の歩行データ計測装置は、複数の受光器を混同することなく、夫々の受光器までの距離を特定できる点に特徴がある。
【0041】
実施例の歩行データ計測装置の留意点を述べる。照射方向情報は、照射方向毎にレーザ光に付された固有の番号であってもよい。その場合、各番号がどの照射方向に相当するのかを示す参照テーブルが演算ユニット内に記憶される。この場合、受光器は受光したレーザ光からレーザ光の番号を読み取って演算ユニットへ送信する。演算ユニットは、参照テーブルを使って、送られたレーザ光番号に相当する照射方向を特定することができる。
【0042】
受光器の個数は、少なくとも2個であればよい。第1実施例の場合、LRFの個数は少なくとも1個でよい。第2実施例の場合、LRFの個数は少なくとも2個でよい。
【0043】
本発明の歩行データ計測装置は、人の歩行動作の解析や評価のみならず、アクチュエータによって人の脚関節にトルクを加えて歩行動作を補助する歩行補助装置用のセンサに適用することも好適である。さらに、本発明の歩行データ計測装置は、脚式歩行ロボットのセンサとして用いることも好適である。
【0044】
以上、本発明の具体例を詳細に説明したが、これらは例示に過ぎず、特許請求の範囲を限定するものではない。特許請求の範囲に記載の技術には、以上に例示した具体例を様々に変形、変更したものが含まれる。本明細書または図面に説明した技術要素は、単独であるいは各種の組合せによって技術的有用性を発揮するものであり、出願時請求項記載の組合せに限定されるものではない。また、本明細書または図面に例示した技術は複数目的を同時に達成し得るものであり、そのうちの一つの目的を達成すること自体で技術的有用性を持つものである。
【符号の説明】
【0045】
10、110:歩行データ計測装置
12、112a、112b:走査型光学距離センサ(LRF)
14、24:接地センサ
15、25:ジャイロ
16、26:通信器
18、118:演算ユニット
22a、22b、122a、122b:受光器
【技術分野】
【0001】
本発明は、一方の足に対する他方の足の相対位置を計測する技術に関する。
【背景技術】
【0002】
歩行動作の解析や評価のため、或いは歩行補助装置のセンサとして、歩行時や走行時の歩幅や進行方向、或いは速度などの歩行データを取得したいという要求がある。本明細書における歩行データは、一方の足に対する他方の足の相対位置と相対角度を意味する。もちろんそれ以外のデータを含んでいてもよい。本明細書では、簡単のため、2つの足の相対位置と相対角度を合わせて相対位置と称する。歩行データを取得する装置が、例えば特許文献1や特許文献2に開示されている。
【0003】
特許文献1の技術では、左右の靴にジャイロを搭載し、ジャイロの計測値から歩行データを算出する。特許文献2の技術では、一方の靴から他方の靴へ向けてグレイコードを照射し、他方の靴で受光したグレイコードの光の強度から、両足の相対距離を算出して歩行データを生成する。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−73285号公報
【特許文献2】特開2004−170166号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ジャイロが検出するのは加速度や速度であるから、それらのデータから両足の相対位置を算出するのでは精度が低い。グレイコードの光を用いる場合は、環境光の影響を受け易い。本発明は、上記課題に鑑み、従来の方法とは異なる方法で歩行データを精度良く計測する技術を提供する。
【課題を解決するための手段】
【0006】
距離を正確に計測するのに適した距離センサとして、走査型光学距離センサがある。走査型光学距離センサの典型は、レーザレンジファインダ(Laser Range Finder)であり、それは、レーザ光を1次元、或いは2次元的に走査しながら各方向の距離を計測する。歩行データを計測する一つの手法として、一方の足に走査型光学距離センサを配置し、他方の足の相対位置を計測することが考えられる。しかし、足は形状が複雑であるため、相対位置を正確に計測するには、足の特定の2点までの距離を正確に計測する必要がある。なお2点の距離計測が必要とされるのは、一方の足に対する他方の足の相対的な角度を決定するためである。以下では簡単のため、走査型光学距離センサを単に「LRF」と称することがある。
【0007】
本発明は、一方の足にLRFを配置するとともに他方の足にLRFの照射光を受光する複数の受光器を配置し、受光器が照射光を受光したときのその照射光によってLRFから受光器までの距離を正確に計測し、計測された距離を使って歩行データを算出する、という技術的思想に基づく。LRFと受光器の配置位置は予め正確に解っているから、それらの間の計測距離から両足の正確な相対位置(相対角度を含む)を求めることができる。さらに本発明は、一つのLRFが複数の受光器までの距離を計測した際、計測されたそれぞれの距離がいずれの受光器までの距離であるかを判別する仕組みを有することを特徴とする。
【0008】
本明細書が開示する一つの歩行データ計測装置は、接地センサと、LRFと、複数の受光器と、演算ユニットを備える。接地センサは、それぞれの足に取り付けられる。本発明は、測距のための照射光の強さを変化させることによって照射光に情報を含ませることができるLRFを採用する。LRFは、一方の足に取り付けられる。各受光器は、LRFの照射光を受光し、その照射光に含まれている情報を読み取ることができる。複数の受光器は、他方の足に取り付けられる。
【0009】
この歩行データ計測装置は、次のとおりに歩行データを計測する。まず、接地センサが接地を検知している間に、走査型光学距離センサが照射光の照射方向を示す照射方向情報を含ませた照射光を、照射方向を連続的に変えながら照射して各照射方向における距離を計測する。次いで、接地センサが接地を検知している間に各受光器が、受光した照射光に含まれている照射方向情報を読み取り、読み取った照射方向情報と自己を識別するための受光器識別子を演算ユニットへ送信する。そして、演算ユニットが、受信した受光器識別子と照射方向情報、及び、走査型光学距離センサが計測した各照射方向の計測距離から一方の足に対する各受光器の方向と距離を算出し、各受光器の方向と距離から2つの足の相対位置(相対角度を含む)を算出する。
【0010】
上記の歩行データ計測装置では、受光器が受光した照射光の照射方向が、その照射光に含まれている照射方向情報によって特定される。この照射方向情報によって、LRFが計測した照射方向別の計測距離群の中から受光器までの距離を特定することができる。なお、各受光器は自己を識別する受光器識別子を発信しているので、一つのLRFが計測した照射方向別の計測距離群から夫々の受光器までの距離を特定することができる。受光器の取り付け位置とLRFの取り付け位置は既知であるので、LRFから夫々の受光器までの正確な距離から、一方の足に対する他方の足の正確な相対位置(相対角度を含む)を特定することができる。
【0011】
上記の歩行データ計測装置では、照射光に照射方向情報を含ませる。照射方向情報の精度が高くない場合には、上記歩行データ計測装置を変形した次の歩行データ計測装置が好適である。即ち、本明細書が開示する他の歩行データ計測装置は、夫々の足に取り付けられる接地センサと、一方の足に取り付けられる複数のLRF(走査型光学距離センサ)と、他方の足に取り付けられる複数の受光器と、演算ユニットを備える。この歩行データ計測装置が採用するLRFも、測距のための照射光の強さを変化させることによって照射光に情報を含ませることができる。また、この歩行データ計測装置の受光器もまた、受光した照射光に含まれている情報を読み取ることができる。
【0012】
この歩行データ計測装置は、次のとおりに歩行データを計測する。まず、両足の接地センサが接地を検知している間に各LRFが自己を識別するためのセンサ識別子を含ませた照射光を照射方向を連続的に変えながら照射する。そして、各照射方向における距離を計測する。接地センサが接地を検知している間に、各受光器が受光した照射光に含まれているセンサ識別子、及び、自己を識別するための受光器識別子を演算ユニットへ送信する。演算ユニットが、センサ識別子を受信したタイミングにおけるそのセンサ識別子によって識別されるLRFの計測距離を、そのセンサ識別子とともに受信した受光器識別子によって識別される受光器までの距離として特定する。そして、特定された各受光器の各LRFに対する相対距離から2つの足の相対位置(相対角度を含む)を算出する。
【0013】
この歩行データ計測装置は、複数のLRFが夫々の受光器までの距離を計測する。LRFの照射光に含まれているセンサ識別子によって、各受光器が受光した照射光がいずれのLRFから照射されたものであるかが判別できる、2つのLRF夫々からの距離が分かれば、受光器の位置が決定できる。2つの受光器の位置が決定できれば、一方の足に対する他方の足の相対位置(相対角を含む)を決定することができる。
【0014】
LRF、受光器、及び、接地センサは、ユーザが履く靴に内蔵するのが好適である。演算ユニットは、LRFとともに靴に内蔵してもよいし、独立したユニットとして腰などに取り付けるものであってもよい。また、他方の足に取り付ける受光器の数は、少なくとも2個であればよい。
【発明の効果】
【0015】
本発明によれば、一方の足に取り付けられたLRFから他方の足に取り付けられた各受光器までの距離が正確に計測できる。LRFから各受光器までの正確な距離から正確な歩行データを得ることができる。
【図面の簡単な説明】
【0016】
【図1】第1実施例の歩行データ計測装置の模式的ブロック図である。
【図2】第1実施例の歩行データ計測装置が実行する処理のフローチャート図である。
【図3】第2実施例の歩行データ計測装置の模式的ブロック図である。
【図4】第2実施例の歩行データ計測装置が実行する処理のフローチャート図である。
【実施例1】
【0017】
図1と図2を用いて第1実施例の歩行データ計測装置10を説明する。本実施例の歩行データ計測装置10は、ユーザが履く靴の靴底に内蔵されている。図1は、歩行データ計測装置10の模式的ブロック図である。図1は、靴底の模式的平面断面図として、歩行データ計測装置10のブロック図を表している。図2は、歩行データ計測装置10が実行する処理のフローチャート図を示している。図1の右側に描かれた靴(右の靴)を靴Aと称し、左側に描かれた靴(左の靴)を靴Bと称する。
【0018】
靴Aは、走査型光学距離センサ12、接地センサ14、ジャイロ15、通信器16、及び、演算ユニット18を内蔵している。靴Bは、2つの受光器22a、22b、接地センサ24、ジャイロ25、及び、通信器26を内蔵している。簡単のため実施例の説明においても「走査型光学距離センサ12」を「LRF12」と称する。
【0019】
図1の符号PAは、靴Aの予め決められた位置を示しており、点PAの位置によって靴Aの位置が表される。同様に、符号PBは靴Bの予め決められた位置を示しており、点PBの位置によって靴Bの位置が表される。符号VABは点PAから点PBへのベクトルを示しており、ベクトルVABが靴Bの靴Aに対する相対位置を表している。また、符号TABが、靴Aに対する靴Bの相対回転角を示している。本実施例では、ベクトルVABと角度TABを合わせて靴Bの靴Aに対する「相対位置」と称する。この「相対位置」が歩行データに相当する。
【0020】
LRF12は、照射方向を連続的に変えながらレーザ光(照射光)を照射し、照射光と反射光の時間差、あるいは位相差から照射方向に存在する物体までの距離を計測する。別言すれば、LRF12は、レーザ光を走査しながら予め決められた角度範囲(走査範囲)内に存在する対象物までの距離を計測する。さらにLRF12は、レーザ光を複数のパルス波として出力することができ、そのパルス波によって照射光にデジタルデータを含ませることができる。パルス波は光の強弱によって実現されるので、別言すれば、LRF12は、レーザ光の強さ変化させることによってレーザ光にデジタルデータ(情報)を含ませることができる。例えば、レーザ光の最初の1パルスは毎回同じであり、照射光と反射光に含まれるこの最初のパルスによって距離を計測する。距離計測用の最初のパルスに続く一群のパルスでデジタルデータを表す。
【0021】
本実施例のLRF12は、照射方向を示す照射方向情報をレーザ光に含ませる。照射方向情報は、図1に示すように、LRF12からその前方へ伸びる基準線L0と照射方向がなす角度で表される。例えば、直線L1で示される照射方向は角度T1であり、直線L2で示される照射方向は角度T2である。LRF12は、例えば角度1度単位で照射方向を変えながら各照射方向に存在する物体までの距離を計測する。即ち、照射方向を変える毎に、そのレーザ光に含まれる照射方向情報も変わる。各照射方向の計測距離は、演算ユニット18へ送られる。
【0022】
LRF12は、靴Aのインサイド(ユーザが履いたときに他方の靴Bと対向する側面)に取り付けられており、他方の靴Bに向かってレーザ光を走査するように配置されている。即ちLRF12は、他方の靴Bまでの距離を計測する。
【0023】
靴Bのインサイドには2つの受光器22a、22bが取り付けられている。これらの受光器は、LRF12のレーザ光を検知する。また、各受光器22a、22bは、受光したレーザ光に含まれているデジタルデータを読み取ることができる。受光器22a、22bには、それぞれ固有の識別子(受光器識別子)が与えられている。受光器22a、22bのそれぞれは、レーザ光を受光するとそのレーザ光に含まれている照射方向情報と自己の受光器識別子を演算ユニット18へ送信する。なお、LRF12は、受光器22a、22bに限らず、レーザ光が照射された対象物までの距離を計測することができることができる点に留意されたい。すなわち、LRF12は、靴Bのインサイドの各点までの距離を計測する。実施例の歩行データ計測装置10は、後述するように、LRF12が計測した照射方向毎の距離のうち、いずれの照射方向の計測距離が受光器22a又は22bまでの距離であるかを確実に判別することができる。多数の方向の計測距離群の中から各受光器22a、22bまでの距離を選別できる点にこの歩行データ計測装置10の特徴がある。
【0024】
それぞれの靴の裏には接地センサ14、24が取り付けられている。接地センサ14、24は、歪ゲージや感圧素子、或いは単純接点等で構成されており、歪ゲージ等の出力によって靴が接地しているか否かを判別する。
【0025】
ジャイロ15は、靴Aの鉛直線周りの回転角速度を計測する。演算ユニット18は、角速度を積分し、靴Aの鉛直線周りの回転角を算出する。ジャイロ25は、靴Bの鉛直線周りの回転角速度を計測する。演算ユニット18は、角速度を積分し、靴Bの鉛直線周りの回転角を算出する。
【0026】
符号16と26は赤外線を使った通信器であり、照射方向情報と受光器識別子を、靴Bに内蔵された受光器22a、22bから靴Aに内蔵された演算ユニット18へ送信する機能を果たす。また、靴Bに内蔵された接地センサ24の出力も、通信器16、26を介して演算ユニット18へ送られる。
【0027】
図2のフローチャートを参照して、歩行データ計測装置10が実行する処理を説明する。図2の処理は、歩行中の歩幅と歩行方向を計測する処理である。図2の処理は、1歩行ステップ毎に実行される。歩行データ計測装置10は、靴A(LRF12を内蔵している靴)が接地しているか否かを、接地センサ14によって判断する(S2)。靴Aが接地していなければ(S2:NO)、処理を終了する。靴Aが接地している場合(S2:YES)、演算ユニット18は、ジャイロ15が検出する角速度に基づいて、靴Aの回転角を算出する(S4)。演算ユニット18はステップS4において、前回の歩行ステップにおける処理から現在までのジャイロ15の出力(角速度)を時間軸に沿って積分して靴Aの回転角を算出する。即ち、ステップS4では、一歩の間の靴Aの回転角が算出される。
【0028】
次に、歩行データ計測装置10は、LRF12を動作させる(S6)。LRF12は、靴Bだけでなく、走査範囲内に存在する物体全ての距離を計測する。LRF12は、前述したように、走査範囲内で、レーザ光の照射方向を連続的に変えながら、各照射方向に存在する物体までの距離を計測する。LRF12単体では、距離計測の対象が何であるかは判別できないことに留意されたい。レーザ光の照射方向とその方向の計測距離は、演算ユニット18に送られて記憶される。また、前述したように、照射方向毎の各レーザ光には、そのレーザ光の照射方向を示す照射方向情報が含まれる。
【0029】
他方、靴Bに内蔵されている受光器22aと22bは、LRF12が照射したレーザ光を受光する(S10)。夫々の受光器22a、22bが受光するレーザ光は、別の照射方向を向いていることに留意されたい。図1の例では、受光器22aは照射角度(照射方向)T1のレーザ光を受光し、受光器22bは照射角度(照射方向)T2のレーザ光を受光する。それぞれの受光器22a、22bは、受光したレーザ光に含まれている照射方向情報を読み取る。受光器22aが受光したレーザ光には照射角度T1を示すデータが含まれており、受光器22bが受光したレーザ光には照射角度T2を示すデータが含まれている。
【0030】
歩行データ計測装置10は、受光器22a、22bがレーザ光を受光したときに靴Bが接地していない場合には(S12:NO)、靴Bが未接地である旨を演算ユニット18へ送信する(S22)。このとき、受光したデータは破棄される。靴Bの受光器22a、22bから靴Aの演算ユニット18へのデータ通信は、通信器16、26を介して行われる。靴Bが未接地である旨のデータを受信した演算ユニット18は処理を終了する。
【0031】
他方、靴Bが接地している場合(S12:YES)、演算ユニット18は、ジャイロ25が検出する角速度に基づいて、靴Bの回転角を算出する(S14)。演算ユニット18はステップS14において、前回の歩行ステップにおける処理から現在までのジャイロ25の出力(角速度)を時間軸に沿って積分して靴Bの回転角を算出する。即ち、ステップS14では、一歩の間の靴Bの回転角が算出される。ジャイロ25が検出した角速度も、通信器16、26を介して演算ユニット18へ送られる。
【0032】
次に歩行データ計測装置10は、それぞれの受光器22a、22bが受光したレーザ光に含まれている照射方向情報と自己の受光器識別子を演算ユニット18へ送信する(S16)。なお、図2における「受光器ID」が受光器識別子に相当する。図1の例では、受光器22aは、照射角度(照射情報)T1を示すデータと、自己の受光器識別子を演算ユニット18へ送信する。受光器22bは、照射角度(照射情報)T2を示すデータと、自己の受光器識別子を演算ユニット18へ送信する。
【0033】
演算ユニット18は、受信した照射方向情報と受光器識別子と、既に記憶している照射方向毎の計測距離から、LRF12を基準とした各受光器の方向と距離を求める。即ち、図1のベクトルL1(LRF12から受光器22aへのベクトル)と、ベクトルL2(LRF12から受光器22bへのベクトル)が求まる。LRF12と点PAの相対位置、及び、各受光器22a、22bと点PBの相対位置は予め分かっているので、ベクトルL1とL2から、ベクトルVABと角度TAB、即ち、靴Bの靴Aに対する相対位置(相対角度)が算出できる。演算ユニット18は、算出された相対位置とそれぞれの靴の回転角を記憶する。こうして、1歩行ステップにおける歩行データが取得される。歩行データ計測装置10は、1歩行ステップ毎に上記の処理を繰り返す。
【実施例2】
【0034】
次に、図3を参照して第2実施例の歩行データ計測装置110を説明する。第2実施例の歩行データ計測装置110は、靴Aに2つのLRF112a、112bを内蔵している。その他は第1実施例の歩行データ計測装置10と同じである。各LRF112a、112bは、照射するレーザ光に、自己を識別するためのセンサ識別子を含ませる。この点が、第1実施例の歩行データ計測装置10と異なる点である。また、第2実施例の歩行データ計測装置110は、照射方向情報を使わない。
【0035】
歩行データ計測装置110が実行する処理のフローチャートを図4に示す。本実施例の歩行データ計測装置110は、両足の接地センサ14、24が共に接地を検出している場合に以下の処理を実行する(S40:YES)。ステップS42では、夫々の靴のジャイロ15、25のデータ(角速度)から、それぞれの靴の回転角を算出する(S42)。次に、ステップS44では、各LRF112a、112bが、走査範囲内に存在する物体全ての距離を計測する。このとき各LRF112a、112bは、照射するレーザ光に、自己を識別するためのセンサ識別子を含ませる。図4では、センサ識別子を記号「LRF_ID」で表している。
【0036】
受光器122a、122bはそれぞれ、LRF112a、112bが照射したレーザ光を受光する(S46)。各受光器は、レーザ光を受光すると直ちにレーザ光に含まれているセンサ識別子を読み取るとともに、読み取ったセンサ識別子と自己を識別するための受光器識別子を演算ユニット118へ送る(S48)。演算ユニット118は、センサ識別子を受信したタイミングにおけるそのセンサ識別子が示すLRFの計測距離を、受光器識別子が示す受光器までの計測距離として特定する(S50)。図3の例では、受光器122aがLRF112aのレーザ光を受光したとき、演算ユニット118は、受光器122aの識別子とともにLRF112aのセンサ識別子を受信する。受信したタイミングにおけるLRF112aの計測距離が、符号La1で示される距離である。また受光器122aがLRF112bのレーザ光を受光したとき、演算ユニット118は、受光器122aの識別子とともにLRF112bのセンサ識別子を受信する。受信したタイミングにおけるLRF112bの計測距離が、符号La2で示される距離である。さらに受光器122bがLRF112aのレーザ光を受光したとき、演算ユニット118は、受光器122bの識別子とともにLRF112aのセンサ識別子を受信する。受信したタイミングにおいてLRF112aが計測した距離が、符号Lb1で示される距離である。同様に、受光器122bがLRF112bのレーザ光を受光したとき、演算ユニット118は、受光器122bの識別子とともにLRF112bのセンサ識別子を受信する。受信したタイミングにおいてLRF112bが計測した距離が、符号Lb2で示される距離である。
【0037】
こうして、演算ユニット118は、LRF112aと受光器122aの間の距離La1、LRF112bと受光器122aの間の距離La2、LRF112aと受光器122bの間の距離Lb1、LRF112bと受光器122bの間の距離Lb2を特定する。
【0038】
靴A上の2点(2つのLRFの位置)から受光器122aまでの2つの距離La1、La2によって、靴A(点PA)に対する受光器122aまでの距離と方向が算出される。同様に、靴A上の2点から受光器122bまでの2つの距離Lb1、Lb2によって、靴A(点PA)に対する受光器122bまでの距離と方向が算出される。受光器122aと122bの相対位置と方向から、ベクトルVABと角度TAB、即ち、靴Bの靴Aに対する相対位置(相対角度含む)が算出される。演算ユニット118は、算出された相対位置とそれぞれの靴の回転角を記憶する。こうして、1歩行ステップの歩行データが取得される。歩行データ計測装置110は、1歩行ステップ毎に上記の処理を繰り返す。
【0039】
第2実施例の歩行データ計測装置110は、LRFの照射方向情報を用いない。歩行データ計測装置110は、LRFの照射方向の精度が低い場合に有効である。
【0040】
実施例の歩行データ計測装置はいずれも、それぞれの受光器がレーザ光(距離計測用の照射光)を受光したときに照射光に含まれる情報とともに自己の受光器識別子を演算ユニットへ送る。このことが、LRFが計測した距離がいずれの受光器までの距離であるかを判別するのに役立っている。実施例の歩行データ計測装置は、複数の受光器を混同することなく、夫々の受光器までの距離を特定できる点に特徴がある。
【0041】
実施例の歩行データ計測装置の留意点を述べる。照射方向情報は、照射方向毎にレーザ光に付された固有の番号であってもよい。その場合、各番号がどの照射方向に相当するのかを示す参照テーブルが演算ユニット内に記憶される。この場合、受光器は受光したレーザ光からレーザ光の番号を読み取って演算ユニットへ送信する。演算ユニットは、参照テーブルを使って、送られたレーザ光番号に相当する照射方向を特定することができる。
【0042】
受光器の個数は、少なくとも2個であればよい。第1実施例の場合、LRFの個数は少なくとも1個でよい。第2実施例の場合、LRFの個数は少なくとも2個でよい。
【0043】
本発明の歩行データ計測装置は、人の歩行動作の解析や評価のみならず、アクチュエータによって人の脚関節にトルクを加えて歩行動作を補助する歩行補助装置用のセンサに適用することも好適である。さらに、本発明の歩行データ計測装置は、脚式歩行ロボットのセンサとして用いることも好適である。
【0044】
以上、本発明の具体例を詳細に説明したが、これらは例示に過ぎず、特許請求の範囲を限定するものではない。特許請求の範囲に記載の技術には、以上に例示した具体例を様々に変形、変更したものが含まれる。本明細書または図面に説明した技術要素は、単独であるいは各種の組合せによって技術的有用性を発揮するものであり、出願時請求項記載の組合せに限定されるものではない。また、本明細書または図面に例示した技術は複数目的を同時に達成し得るものであり、そのうちの一つの目的を達成すること自体で技術的有用性を持つものである。
【符号の説明】
【0045】
10、110:歩行データ計測装置
12、112a、112b:走査型光学距離センサ(LRF)
14、24:接地センサ
15、25:ジャイロ
16、26:通信器
18、118:演算ユニット
22a、22b、122a、122b:受光器
【特許請求の範囲】
【請求項1】
夫々の足に取り付けられる接地センサと、
一方の足に取り付けられる走査型光学距離センサであり、測距のための照射光の強さを変化させることによって照射光に情報を含ませることができる走査型光学距離センサと、
他方の足に取り付けられる複数の受光器であり、前記走査型光学距離センサの照射光を受光し、その照射光に含まれている情報を読み取ることができる複数の受光器と、
演算ユニットを備えており、
接地センサが接地を検知している間に、走査型光学距離センサが、照射光の照射方向を示す照射方向情報を含ませた照射光を、照射方向を連続的に変えながら照射して各照射方向における距離を計測し、
接地センサが接地を検知している間に、各受光器が、受光した照射光に含まれている照射方向情報、及び、自己を識別するための受光器識別子を演算ユニットへ送信し、
演算ユニットが、各受光器から受信した受光器識別子と照射方向情報と、走査型光学距離センサが計測した各照射方向の計測距離から、一方の足に対する各受光器の方向と距離を算出し、各受光器の方向と距離から2つの足の相対位置を算出することを特徴とする歩行データ計測装置。
【請求項2】
夫々の足に取り付けられる接地センサと、
一方の足に取り付けられる複数の走査型光学距離センサであり、測距のための照射光の強さを変化させることによって照射光に情報を含ませることができる複数の走査型光学距離センサと、
他方の足に取り付けられる複数の受光器であり、前記走査型光学距離センサの照射光を受光し、その照射光に含まれている情報を読み取ることができる複数の受光器と、
演算ユニットを備えており、
接地センサが接地を検知している間に、各走査型光学距離センサが、自己を識別するためのセンサ識別子を含ませた照射光を、照射方向を連続的に変えながら照射して各照射方向における距離を計測し、
接地センサが接地を検知している間に、各受光器が、受光した照射光に含まれているセンサ識別子、及び、自己を識別するための受光器識別子を演算ユニットへ送信し、
演算ユニットが、センサ識別子を受信したタイミングにおけるそのセンサ識別子によって識別される走査型光学距離センサの計測距離を、そのセンサ識別子とともに受信した受光器識別子によって識別される受光器までの距離として特定し、特定された各受光器の各距離センサに対する相対距離から2つの足の相対位置を算出することを特徴とする歩行データ計測装置。
【請求項1】
夫々の足に取り付けられる接地センサと、
一方の足に取り付けられる走査型光学距離センサであり、測距のための照射光の強さを変化させることによって照射光に情報を含ませることができる走査型光学距離センサと、
他方の足に取り付けられる複数の受光器であり、前記走査型光学距離センサの照射光を受光し、その照射光に含まれている情報を読み取ることができる複数の受光器と、
演算ユニットを備えており、
接地センサが接地を検知している間に、走査型光学距離センサが、照射光の照射方向を示す照射方向情報を含ませた照射光を、照射方向を連続的に変えながら照射して各照射方向における距離を計測し、
接地センサが接地を検知している間に、各受光器が、受光した照射光に含まれている照射方向情報、及び、自己を識別するための受光器識別子を演算ユニットへ送信し、
演算ユニットが、各受光器から受信した受光器識別子と照射方向情報と、走査型光学距離センサが計測した各照射方向の計測距離から、一方の足に対する各受光器の方向と距離を算出し、各受光器の方向と距離から2つの足の相対位置を算出することを特徴とする歩行データ計測装置。
【請求項2】
夫々の足に取り付けられる接地センサと、
一方の足に取り付けられる複数の走査型光学距離センサであり、測距のための照射光の強さを変化させることによって照射光に情報を含ませることができる複数の走査型光学距離センサと、
他方の足に取り付けられる複数の受光器であり、前記走査型光学距離センサの照射光を受光し、その照射光に含まれている情報を読み取ることができる複数の受光器と、
演算ユニットを備えており、
接地センサが接地を検知している間に、各走査型光学距離センサが、自己を識別するためのセンサ識別子を含ませた照射光を、照射方向を連続的に変えながら照射して各照射方向における距離を計測し、
接地センサが接地を検知している間に、各受光器が、受光した照射光に含まれているセンサ識別子、及び、自己を識別するための受光器識別子を演算ユニットへ送信し、
演算ユニットが、センサ識別子を受信したタイミングにおけるそのセンサ識別子によって識別される走査型光学距離センサの計測距離を、そのセンサ識別子とともに受信した受光器識別子によって識別される受光器までの距離として特定し、特定された各受光器の各距離センサに対する相対距離から2つの足の相対位置を算出することを特徴とする歩行データ計測装置。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2011−112360(P2011−112360A)
【公開日】平成23年6月9日(2011.6.9)
【国際特許分類】
【出願番号】特願2009−265925(P2009−265925)
【出願日】平成21年11月24日(2009.11.24)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成23年6月9日(2011.6.9)
【国際特許分類】
【出願日】平成21年11月24日(2009.11.24)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]