
歩行支援機
【課題】車輪に動力が与えられ、歩行支援機につかまって歩行する使用者が容易に操縦できる歩行支援機を提供すること。
【解決手段】使用者9と一緒に走行する支援車1によって使用者9の歩行動作を支援する歩行支援機100であって、左右のドライブ車輪5と、この左右のドライブ車輪5を駆動する駆動装置50と、左右のドライブ車輪5が取り付けられ使用者9が内側に入って歩行するための支援フレーム2と、この支援フレーム2に取り付けられ操作力が入力される操作バー31と、操作バー31に入力れる操作力に応じて駆動装置50の動力を制御するコントローラ30と、を備える。
【解決手段】使用者9と一緒に走行する支援車1によって使用者9の歩行動作を支援する歩行支援機100であって、左右のドライブ車輪5と、この左右のドライブ車輪5を駆動する駆動装置50と、左右のドライブ車輪5が取り付けられ使用者9が内側に入って歩行するための支援フレーム2と、この支援フレーム2に取り付けられ操作力が入力される操作バー31と、操作バー31に入力れる操作力に応じて駆動装置50の動力を制御するコントローラ30と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、使用者の歩行動作を支援する歩行支援機に関するものである。
【背景技術】
【0002】
従来から、主として下肢障害者の歩行訓練のために、歩行動作を支援する歩行支援機が用いられている。
【0003】
特許文献1には、使用者がシート(座部)に着座した状態から、平行リンク機構を用いてシートを上昇させる歩行支援機が開示されている。
【0004】
この歩行支援機は、使用者がシートに着座したまま脚を動かして歩行動作を行うためのものである。使用者がシートに着座した状態では、使用者の体重をシートが支持するため、歩行訓練中に使用者の下肢にかかる負担が軽減され、歩行動作が支援される。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2004−8464号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、このような従来の歩行支援機にあっては、歩行支援機がキャスタ車輪を介して走行するものであり、使用者が歩行支援機に推力を与える必要があるため、下肢障害者とってはこの歩行支援機によって歩行することが難しい場合があった。
【0007】
これに対処して、歩行支援機の車輪に動力を与えることが考えられるが、使用者が、歩行支援機につかまって歩行することと、歩行支援機の走行方向、速度を操縦することとを同時に行うことが難しいという問題点があった。
【0008】
本発明は上記の問題点に鑑みてなされたものであり、車輪に動力が与えられ、歩行支援機につかまって歩行する使用者が容易に操縦できる歩行支援機を提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明は、使用者と一緒に走行する支援車によって使用者の歩行動作を支援する歩行支援機であって、左右のドライブ車輪と、この左右のドライブ車輪を駆動する駆動装置と、左右のドライブ車輪が取り付けられ使用者が内側に入って歩行するための支援フレームと、この支援フレームに取り付けられ操作力が入力される操作バーと、操作バーに入力される操作力に応じて駆動装置の動力を制御するコントローラと、を備えることを特徴とする。
【発明の効果】
【0010】
本発明によれば、歩行支援機は、駆動装置によって左右のドライブ車輪に動力が与えられ、使用者が操作バーにつかまって歩行しながら、使用者から操作バーに操作力が入力される。これにより、使用者は直感的に歩行支援機を操縦することが可能となる。この結果、使用者に容易に操縦させることができ、使用者の歩行支援ができる。
【図面の簡単な説明】
【0011】
【図1】本発明の実施形態を示す歩行支援機の側面図である。
【図2】歩行支援機の平面図である。
【図3】歩行支援機の背面図である。
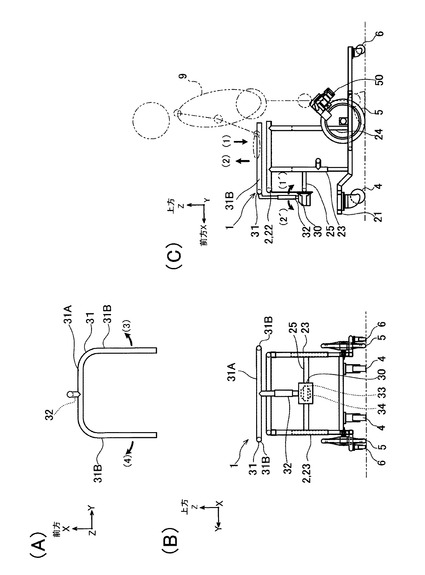
【図4】(A)、(B)、(C)は、操作バー等の平面図、正面図、側面図である。
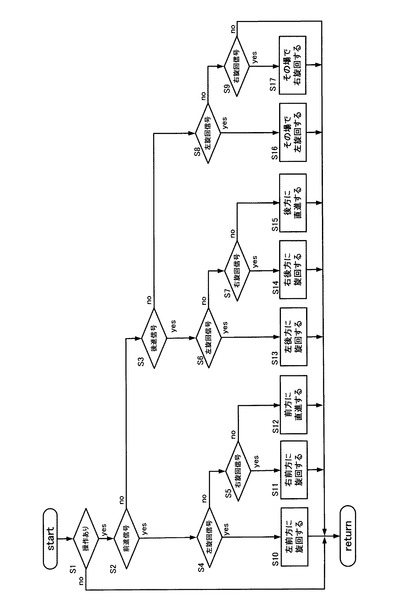
【図5】左右の電動モータを制御する内容を示すフローチャートである。
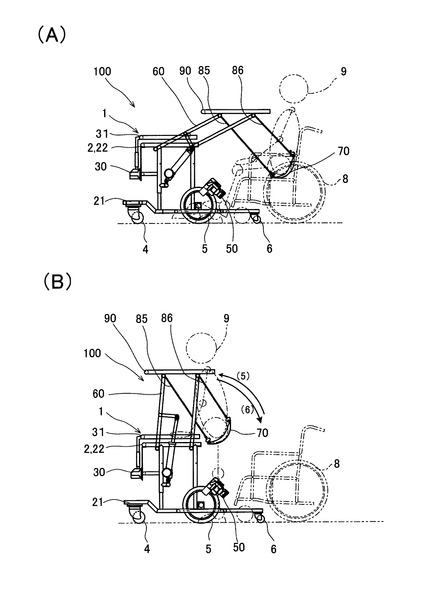
【図6】(A)、(B)は、歩行支援機の動作を示す側面図である。
【発明を実施するための形態】
【0012】
以下、本発明の実施形態を添付図面に基づいて説明する。
【0013】
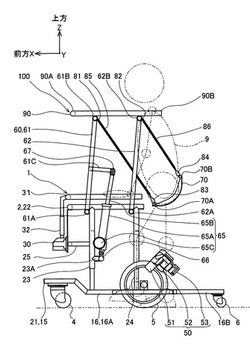
図1〜3に示す歩行支援機100は、主として下肢障害者の歩行訓練にて、歩行動作を支援するために用いられる。歩行支援機100は、路面(床面)上を走行可能な支援車1と、この支援車1に昇降可能に取り付けられる昇降フレーム90と、使用者9が着座可能なシート(座部)70と、昇降フレーム90にシート70を吊り下げる吊り具85、86と、シート70を昇降フレーム90に着脱可能に連結する連結手段と、を備える。
【0014】
歩行支援機100は、使用者9がシート70に着座したまま脚を動かして歩行動作を行うためのものである。使用者9が昇降フレーム90に吊り下げられるシート70に着座した状態では、使用者9の体重がシート70によって支持されるため、歩行訓練中に使用者9の下肢にかかる負担を軽減できる。
【0015】
以下、歩行支援機100の構造を説明する。ここで、互いに直交するX、Y、Zの3軸を設定し、X軸が略水平前後方向、Y軸が略水平横方向、Z軸が上下方向(略鉛直方向)に延びるものとする。
【0016】
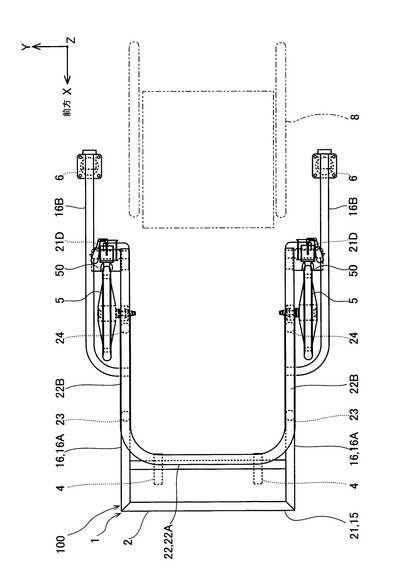
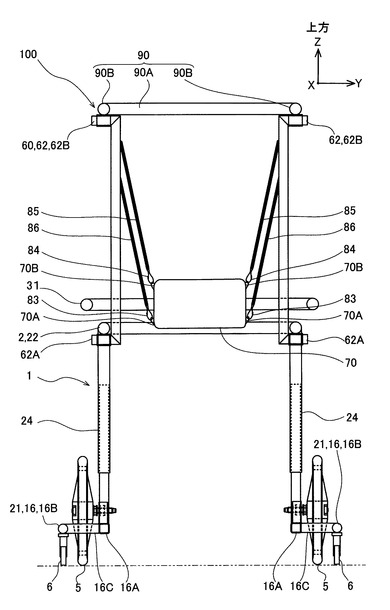
図1は、歩行支援機100の側面図である。図2は、歩行支援機100の平面図であり、昇降フレーム90、後述する駆動装置50等が外された状態を示す。図3は、支援車1を後方から見た背面図であり、駆動装置50、後キャスタ車輪6等が外された状態を示す。
【0017】
図1に示すように、支援車1は、その本体として設けられる支援フレーム2を備える。支援フレーム2は、コの字形の下フレーム21及びU字形の上フレーム22と、これらを連結する左右の前後ポスト(ポスト)23、24と、を備える。
【0018】
前後ポスト23、24は、伸縮可能に嵌合する上下のパイプからなり、それぞれの長さを変えられる。前後ポスト23、24の上のパイプが上フレーム22に結合される。前後ポスト23、24の下のパイプが下フレーム21に結合される。これにより、使用者9の伸長等に応じて上フレーム22の高さを調節できる。そのため、シート70の高さを使用者9の身長に対して低めに調整すれば、使用者9の下肢に少しずつ負担をかけて歩行訓練を行うことも可能である。
【0019】
下フレーム21には、その中央部に配置される左右のドライブ車輪(車輪)5と、このドライブ車輪5より前方に配置される左右の前キャスタ車輪(車輪)4と、ドライブ車輪5より後方に配置される後キャスタ車輪(車輪)6と、が設けられる。
【0020】
左右のドライブ車輪5は、左右の駆動装置50によってそれぞれ駆動される。この駆動装置50は、電動モータ51と、この電動モータ51によって回転駆動されるローラ52と、このローラ52をドライブ車輪5に押し付けるローラ押し付け機構53と、を備える。このローラ押し付け機構53は、手動操作によってローラ52をドライブ車輪5に押し付けるドライブ位置と、ローラ52をドライブ車輪5から離すフリー位置と、に切り換えられる。なお、これに限らず、ドライブ車輪5の駆動装置は、電動モータの動力が、例えばギア、チェーン等を介して左右のドライブ車輪5の車軸に伝達される構成としてもよい。
【0021】
左右の前、後キャスタ車輪4、6は、支援車1が移動するのに伴って、当該前、後キャスタ車輪4、6の転がり摩擦抵抗により各車軸がZ軸まわりに回動して旋回し、進行方向を向くように操舵される。
【0022】
図2に示すように、上フレーム22は、パイプ材をU字形に曲げて形成される。上フレーム22は、Y軸方向に延びるフレーム前部22Aと、このフレーム前部22Aの左右端から曲げられX軸後方向へと延びる左右のフレーム側部22Bと、を有する。上フレーム22は、左右のフレーム側部22Bの後方部が開放される。
【0023】
下フレーム21は、図2に示す平面図上にてコの字形に形成され、支援車1の前部にてY軸方向(左右方向)に延びるクロスメンバ15と、このクロスメンバ15の左右端からX軸後方向に延びる左右のサイドメンバ16と、を備える。これにより、下フレーム21は、左右のサイドメンバ16の後方部が開放され、使用者9が下フレーム21の後部から下フレーム21の内側に入れる構成とする。これにより、使用者9が下フレーム21の内側に入って歩行できる。
【0024】
左右のドライブ車輪5は、X軸方向について支援車1の中央部に配置される。これにより、左右のドライブ車輪5が互いに逆回転することによって、歩行支援機100が使用者9が位置する支援車1の中央部を中心として旋回し、使用者9が移動することなくその場で向く方向を変えられる。
【0025】
クロスメンバ15には、左右の前キャスタ車輪4が取り付けられる。これにより、左右の前キャスタ車輪4は、支援車1の前端部に配置され、歩行支援機100が前方に倒れないように支持する。なお、左右一対の前キャスタ車輪4が設けられる構成に限らず、1つまたは3つ以上の前キャスタ車輪4が設けられる構成としてもよい。
【0026】
左右のサイドメンバ16は、クロスメンバ15の左右端からX軸後方向に延びる左右の第一サイドメンバ16Aと、この第一サイドメンバ16Aの外側に配置されてX軸後方向に延びる左右の第二サイドメンバ16Bと、を備える。
【0027】
左右の第一サイドメンバ16Aには、左右のドライブ車輪5の車軸が支持される。左右のドライブ車輪5は、X軸方向について支援車1の中央部に配置される。
【0028】
左右の第二サイドメンバ16Bは、その前端が湾曲して左右の第一サイドメンバ16Aに結合され、その中程がY軸方向に延びる左右のメンバ16Cを介して左右の第一サイドメンバ16Aに結合される。左右の第一サイドメンバ16Aと左右の第二サイドメンバ16Bとの間に、左右のドライブ車輪5がそれぞれ配置される。
【0029】
図3に示すように、左右の第二サイドメンバ16Bの後端部には、左右の後キャスタ車輪6がそれぞれ取り付けられる。こうして、左右の後キャスタ車輪6が左右のドライブ車輪5から十分に離して支援フレーム2の後端部に配置されることにより、図6の(A)に示すように、昇降フレーム90が後方にある状態でも、歩行支援機100が後方に倒れないように左右の後キャスタ車輪6によって支持される。なお、左右一対の後キャスタ車輪6が設けられる構成に限らず、1つまたは3つ以上の前キャスタ車輪6が設けられる構成としてもよい。
【0030】
左右の第二サイドメンバ16Bは、左右の第一サイドメンバ16Aの外側に左右のドライブ車輪5をそれぞれ挟むように配置される。こうして、Y軸方向について左右の後キャスタ車輪6の間隔が左右のドライブ車輪5の間隔より大きくなることにより、図2に2点鎖線で示すように、車椅子8が支援フレーム2の内側に余裕をもって進入できる。
【0031】
支援車1は、支援フレーム2に搭載されるバッテリ(図示せず)と、このバッテリから左右の電動モータ51に供給される電力を制御するコントローラ30と、このコントローラ30を操作する操作バー31と、を備える。使用者9が操作バー31に与える操作力に応じて、コントローラ30が左右の電動モータ51の動力(出力)を制御し、左右のドライブ車輪5に動力が与えられる。
【0032】
図1に示すように、使用者9が支援フレーム2の内側に入って歩行するときに、使用者9の両手に左右の操作バー側部31B(図4参照)がそれぞれ持たれる。操作バー31は、支援車1の内側で歩行する使用者9に持たれることにより、使用者9の体重を支えるとともに、使用者9によって上下方向、左右方向の操作力が与えられ、支援車1の走行方向、走行速度を変える操作が行われる。これにより、使用者9が支援車1につかまって歩行しながら、支援車1を操縦することが可能となり、歩行支援が行われる。
【0033】
図4の(A)、(B)、(C)は、操作バー31等の平面図、正面図、側面図である。コントローラ30は、前フレーム25を介して支援車1の前側中央部に固定される。前フレーム25は、前ポスト23の上のパイプを介して上フレーム22に結合され、上フレーム22と共にその高さが調節される。
【0034】
操作バー31は、パイプ材をU字形に曲げて形成され、同じくU字形の上フレーム22の上方に配置される。操作バー31は、Y軸方向に延びる操作バー前部31Aと、この操作バー前部31Aの左右端から曲げられX軸後方向へと延びる左右の操作バー側部31Bと、を有する。操作バー31は、左右の操作バー側部31Bの後方部が開放される。
【0035】
コントローラ30は、上方向に突出するコントロールロッド32を備え、このコントロールロッド32に操作バー前部31Aの中央部が結合される。
【0036】
コントローラ30は、使用者9が操作バー31に与える力の大きさと方向を検出する操作力検出手段と、この操作力検出手段の検出値に応じて左右の駆動装置50が左右のドライブ車輪5に与える動力をそれぞれ制御する動力制御手段と、を備える。
【0037】
コントローラ30は、操作力検出手段として、使用者9が上下方向に押す操作によって操作バー31に生じる略水平軸(横軸)まわりのトルクを検出する前後方向トルクセンサ33と、使用者9が左右方向に押す操作によって操作バー31に生じる略鉛直軸(縦軸)まわりのトルクを検出する旋回方向トルクセンサ34とを備える。
【0038】
動力制御手段は、前後方向トルクセンサ33によって検出されるトルク値(検出値)に応じて支援車1の停止、前進、後進を切り換える一方、旋回方向トルクセンサ34によって検出されるトルク値(検出値)に応じて支援車1の直進、左旋回、右旋回を切り換えて支援車1の進行方向を制御するとともに、検出されるトルク値が大きくなるのに応じて、支援車1の速度を高めるように制御する。
【0039】
以下、操作バー31の動きと前後方向トルクセンサ33、旋回方向トルクセンサ34が出力する信号との関係を説明する。
【0040】
1.図4の(C)に矢印(1)で示すように、使用者9が操作バー31を下方に押すと、コントロールロッド32が矢印(1´)で示すように後方に回動し、前後方向トルクセンサ33がこのトルク値に応じた前進信号を出力する。これにより、使用者9が操作バー31につかまって歩行しながら、操作バー31を下方に押して支援車1を前進させられ、前方への歩行支援が円滑に行われる。
【0041】
2.図4の(C)に矢印(2)で示すように、使用者9が操作バー31を上方に引くと、コントロールロッド32が矢印(2´)で示すように前方に回動し、前後方向トルクセンサ33がこのトルク値に応じた後進信号を出力する。これにより、使用者9が操作バー31につかまって歩行しながら、操作バー31を上方に引いて支援車1を後進させられ、後方への歩行支援が円滑に行われる。
【0042】
なお、これに限らず、例えば前後方向トルクセンサ33の組み付け方向を変えることによって、操作バー31を下方に押して支援車1を後進させ、操作バー31を上方に引いて支援車1を前進させる構成としてもよい。
【0043】
3.図4の(A)に矢印(3)で示すように、使用者9が操作バー31を右方向に押すと、コントロールロッド32が左方向に回動し、旋回方向トルクセンサ34がこのトルク値に応じた左旋回信号を出力する。これにより、使用者9が操作バー31につかまって歩行しながら、操作バー31を右方向に押して支援車1を左旋回させられ、左方向へ曲がる歩行支援が円滑に行われる。
【0044】
4.図4の(A)に矢印(4)で示すように、使用者9が操作バー31を左方向に押すと、コントロールロッド32が右方向に回動し、旋回方向トルクセンサ34がこのトルク値に応じた右旋回信号を出力する。これにより、使用者9が操作バー31につかまって歩行しながら、操作バー31を左方向に押して支援車1を右旋回させられ、右方向に曲がる歩行支援が円滑に行われる。
【0045】
なお、これに限らず、例えば旋回方向トルクセンサ34の組み付け方向を変えることによって、操作バー31を右方向に押して支援車1を右旋回させ、操作バー31を左方向に押して支援車1を左旋回させる構成としてもよい。
【0046】
前後方向トルクセンサ33は、所定の不感帯を有し、所定値以上のトルクが入力されるのに伴って前進信号、後進信号を出力する構成とする。なお、これに限らず、動力制御手段が、前後方向トルクセンサ33から所定値以上の前進信号、後進信号が出力されていることを判定し、前後方向トルクセンサ33から出力される信号が所定値より低い場合には、前後方向トルクセンサ33から前進信号、後進信号が出力されていないものと判定してもよい。
【0047】
同様に、旋回方向トルクセンサ34は、所定の不感帯を有し、所定値以上のトルクが入力されるのに伴って左右旋回信号を出力する構成とする。なお、これに限らず、動力制御手段が、旋回方向トルクセンサ34から所定値以上の左右旋回信号が出力されていることを判定し、旋回方向トルクセンサ34から出力される信号が所定値より低い場合には、旋回方向トルクセンサ34から左右旋回信号が出力されていないものと判定してもよい。
【0048】
図5は、コントローラ30が前後方向トルクセンサ33、旋回方向トルクセンサ34の出力信号(検出値)に応じて左右の電動モータ51を制御する内容を示すフローチャートである。以下、これについて説明する。
【0049】
まず、ステップS1で、前後方向トルクセンサ33と旋回方向トルクセンサ34の出力信号があり、操作バー31を動かす操作が行われたことを判定する。操作が行われた場合には、ステップS2に進み、操作が行われていない場合には、繰り返して操作バー31が操作されたか否かを判定する。
【0050】
ステップS2、S3では、前後方向トルクセンサ33から前進信号、後進信号が出力されているか否かを判定する。
【0051】
ステップS4〜S9では、旋回方向トルクセンサ34から左右旋回信号が出力されているか否かを判定する。
【0052】
ステップS2で、前進信号が出力されていると判定され、ステップS4で、左旋回信号が出力されていると判定された場合に、ステップS10に進んで、支援車1を左前方向に旋回させる。このとき、コントローラ30は、左右の電動モータ51をそれぞれ前進方向に回転させ、右の電動モータ51の回転速度を左の電動モータ51の回転速度より高める。
【0053】
ステップS2で、前進信号が出力されていると判定され、ステップS5で、右旋回信号が出力されていると判定された場合に、ステップS11に進んで、支援車1を右前方向に旋回させる。このとき、コントローラ30は、左右の電動モータ51をそれぞれ前進方向に回転させ、左の電動モータ51の回転速度を右の電動モータ51の回転速度より高める。また、左右の電動モータ51の回転速度比が制御されることにより、支援車1の旋回半径が変えられる。
【0054】
ステップS2で、前進信号が出力されていると判定され、ステップS4、S5で、左右旋回信号が出力されていないと判定された場合に、ステップS12に進んで、支援車1を前方向に直進させる。このとき、コントローラ30は、左右の電動モータ51をそれぞれ前進方向に同一速度で回転させる。
【0055】
ステップS2で、前進信号が出力されていると判定され、ステップS3で、後進信号が出力されていると判定され、ステップS6で、左旋回信号が出力されていると判定された場合に、ステップS13に進んで、支援車1を左後方向に旋回させる。このとき、コントローラ30は、左右の電動モータ51をそれぞれ後進方向に回転させ、右の電動モータ51の回転速度を左の電動モータ51の回転速度より高める。
【0056】
ステップS2で、前進信号が出力されていると判定され、ステップS3で、後進信号が出力されていると判定され、ステップS7で、右旋回信号が出力されていると判定された場合に、ステップS14に進んで、支援車1を右後方向に旋回させる。このとき、コントローラ30は、左右の電動モータ51をそれぞれ後進方向に回転させ、右の電動モータ51の回転速度を左の電動モータ51の回転速度より高める。
【0057】
ステップS2で、前進信号が出力されていると判定され、ステップS3で、後進信号が出力されていると判定され、ステップS6、S7で、左右旋回信号が出力されていないと判定された場合に、ステップS15に進んで、支援車1を後方向に直進させる。このとき、コントローラ30は、左右の電動モータ51をそれぞれ後進方向に同一速度で回転させる。
【0058】
ステップS2、S3で、前進信号、後進信号が出力されていないと判定され、ステップS8で、左旋回信号が出力されていると判定された場合に、ステップS16に進んで、支援車1をその場で左方向に旋回させる。このとき、コントローラ30は、左の電動モータ51を後進方向に回転させ、右の電動モータ51を前進方向に回転させ、左右の電動モータ51を同一速度で回転させる。
【0059】
ステップS2、S3で、前進信号、後進信号が出力されていないと判定され、ステップS9で、右旋回信号が出力されていると判定された場合に、ステップS17に進んで、支援車1をその場で右方向に旋回させる。このとき、コントローラ30は、左の電動モータ51を前進方向に回転させ、右の電動モータ51を後進方向に回転させ、左右の電動モータ51を同一速度で回転させる。
【0060】
こうして、支援車1は、操作バー31が動かされる方向に応じて支援車1を直進、旋回させる制御が行われる。操作バー31が動かされないときは、左右の電動モータ51の駆動が停止される。
【0061】
図1に示すように、歩行支援機100は、使用者9が着座可能なシート70と、このシート70から延びる左右の前後吊り具(吊り具)85、86と、この前後吊り具85、86の端部がそれぞれ連結される昇降フレーム90と、を備える。昇降フレーム90が前方に向けて上昇することにより、シート70に座った使用者9を吊り上げるようになっている。
【0062】
昇降フレーム90は、平行リンク機構60を介して支援フレーム2に昇降可能に支持される。平行リンク機構60を昇降するアクチュエータとして、左右の電動シリンダ65が設けられる。
【0063】
平行リンク機構60は、昇降フレーム90と支援フレーム2とにそれぞれ回動可能に連結される左右の前後リンク61、62を備える。
【0064】
前後リンク61、62の基端部(下端部)は、軸部61A、62Aを介してそれぞれ支援フレーム2の上フレーム22に回動可能に連結される。
【0065】
軸部61A、62Aとは、上フレーム22の下側に配置され、上フレーム22の上側に設けられる操作バー31と干渉しなようになっている。
【0066】
左右の軸部61A、62Aは、それぞれY軸方向に延び、互いにX軸方向(前後方向)について略等しい間隔を持つように配置される。
【0067】
前後リンク61、62の先端部(上端部)は、軸部61B、62Bを介してそれぞれ昇降フレーム90に回動可能に連結される。
【0068】
軸部61B、62Bは、昇降フレーム90の下側に配置され、昇降フレーム90の上側に使用者9の腕や手を載せるのに邪魔にならないようになっている。
【0069】
左右の軸部61B、62Bは、それぞれY軸方向に延び、互いにX軸方向(前後方向)について略等しい間隔を持つように配置される。
【0070】
前後リンク61、62は、略等しい長さを持ち、昇降フレーム90が上フレーム22と略平行(略水平)に保たれて、平行移動するようになっている。
【0071】
電動シリンダ65は、シリンダ65Aと、このシリンダ65Aから伸長するロッド65Bと、このロッド65Bが伸縮作動する動力を与える電動モータ65Cと、を備える。
【0072】
シリンダ65Aの基端部は、ピン66を介して前ポスト23の上のパイプに回動可能に連結される。前ポスト23の上のパイプには、X軸後方向に突出する支持部23Aが設けられ、この支持部23Aによってピン66が支持される。
【0073】
ロッド65Bの先端部は、ピン67を介して前リンク61に回動可能に連結される。前リンク61には、X軸後方向に突出する支持部61Cが設けられ、この支持部61Cによってピン67が支持される。
【0074】
左右の電動シリンダ65が同期して伸縮作動すると、左右のリンク61が軸部61Aを中心として回動し、昇降フレーム90が平行リンク機構60を介して昇降するようになっている。
【0075】
歩行支援機100には、左右の電動シリンダ65の作動を制御する操作器(図示せず)が設けられる。この操作器は、バッテリ(図示せず)の電力を左右の電動シリンダ65に供給し、左右の電動シリンダ65を互いに同期して伸縮作動させる。使用者9は、この操作器を操作して昇降フレーム90を昇降させる。
【0076】
電動シリンダ65は、作動停止時にその伸縮作動を規制するブレーキ機構(図示省略)を備える。よって、シート70に着座した使用者9の体重が平行リンク機構60を介して伝達されても、それによって収縮しない。したがって、昇降フレーム90を任意の高さに調整した後、電動シリンダ65の伸縮作動が停止すると、昇降フレーム90はその高さで固定される。
【0077】
なお、電動シリンダ65を用いるのではなく、例えば、左右のリンク61を直接回動させるアクチュエータをそれぞれの軸部61A、61Bに取り付けてもよい。
【0078】
昇降フレーム90は、上フレーム22及び操作バー31と同じく、パイプ材をU字形に曲げて形成される。昇降フレーム90は、Y軸方向に延びる昇降フレーム前部90Aと、この昇降フレーム前部90Aの左右端から曲げられX軸後方向に延びる左右の昇降フレーム側部90Bと、を有する。昇降フレーム90は、左右の昇降フレーム側部90Bの後方部が開放され、使用者9が昇降フレーム90の後部から昇降フレーム90の内側に入れる構成とする。
【0079】
図1に示すように、左右の電動シリンダ65が最伸長した状態で、昇降フレーム90は、上フレーム22及び操作バー31の上方に位置する。これにより、使用者9が昇降フレーム90及び支援フレーム2の内側に入った状態で、使用者9の腕や手を昇降フレーム90の上側に載せることができる。
【0080】
シート70は、左右の前後吊り具85、86を介して昇降フレーム90に着脱可能に連結される。左右の前後吊り具85、86の上端部は、昇降フレーム90から左右に突出する軸部61B、62Bにそれぞれ掛け回され、着脱可能に連結される。左右の前後吊り具85、86の下端部は、フック83、84を介してシート70に着脱可能に連結される。
【0081】
昇降フレーム90に対する前後吊り具85、86の連結部81、82は、左右の昇降フレーム側部90Bにそれぞれ設けられ、互いにX軸方向について間隔を持つように配置される。
【0082】
ハンモック状のシート70は、柔軟なシート材によって形成され、左右の前後隅部70A、70Bを有する。この前後隅部70A、70Bに左右の前後吊り具85、86の下端部がフック83、84を介して着脱可能に結合される。シート70は、これに使用者9が着座した状態で左右の前後吊り具85、86を介して4箇所で支持される。フック83、84は、シート70を昇降フレーム90に着脱可能に連結する連結手段を構成する。
【0083】
なお、シート70を昇降フレーム90に着脱可能に連結する連結手段は、これに限らず、昇降フレーム90に対する前後吊り具85、86の連結部81、82に、左右の前後吊り具85、86の上端部を昇降フレーム90に結合するフック等を設けてもよい。
【0084】
また、シート70は、ハンモック状のものに限らず、左右の吊り具を1本づつ設け、2箇所で支持されるブランコ状のものを用いてもよい。
【0085】
前後吊り具85、86は、例えば帯状のロープ等によって形成される。使用者9の伸長等に応じて、前後吊り具85、86の長さを調節するようにしてもよい。
【0086】
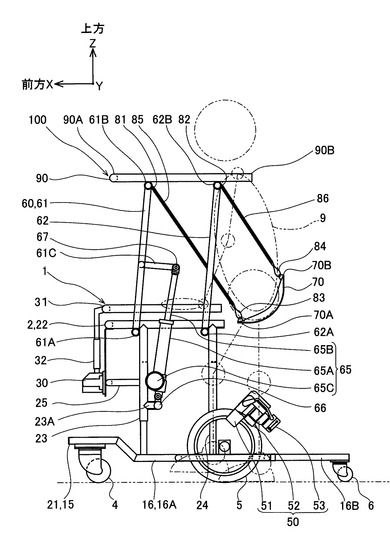
図6の(A)、(B)は、車椅子8に着座した使用者9が歩行支援機100に乗り移る様子を示している。
【0087】
図6の(A)に示すように、予め車椅子8にシート70を敷いて着座した使用者9が、歩行支援機100の内側に進入した状態にて、左右の前後吊り具85、86をシート70にそれぞれ連結する。このとき、左右の電動シリンダ65が収縮しており、昇降フレーム90は、下降した後方位置にある。使用者がシート70を介して車椅子8に着座した状態で、吊り具85、86の下端部を持ってフック83、84を介してシート70に連結することができる。
【0088】
続いて、使用者9が歩行支援機100に乗り移るときに、図6の(B)に示すように、左右の電動シリンダ65を伸長させて、矢印(5)で示すように、平行リンク機構60を上方向に回動させる。このとき、昇降フレーム90が斜め上方に移動するのに伴って、昇降フレーム90に左右の前後吊り具85、86を介して吊り下げられたハンモック状のシート70が斜め上方に移動する。こうして、ハンモック状のシート70は、その姿勢が略一定に保たれたまま移動するため、シート70に着座した使用者9が円滑に歩行支援機100に乗り移ることができる。
【0089】
図6の(B)に示すように、昇降フレーム90が、最上昇した状態で、昇降フレーム90は、上フレーム22及び操作バー31の上方に位置し、使用者9が昇降フレーム90及び支援フレーム21の内側に入った状態で歩行できる。このように、昇降フレーム90によってシート70が吊り上げられた状態では、使用者9の体重がシート70に支持されるため、歩行訓練中に使用者9の下肢にかかる負担が軽減され、歩行動作が支援される。
【0090】
使用者9の歩行時に、使用者9の両手に左右の操作バー側部31Bがそれぞれ持たれ、操作バー31に与えられる操作力に応じて左右のドライブ車輪5がそれぞれ駆動され、歩行動作が支援される。
【0091】
また、駆動装置50のローラ52をドライブ車輪5から離すフリー位置に切り換えられることにより、左右のドライブ車輪5が自由に回転する。この状態で、使用者9に支援車1が押されることによって移動する。
【0092】
使用者9が歩行訓練を終えて歩行支援機100から車椅子8に乗り移る場合に、図6の(B)に矢印(6)で示すように、平行リンク機構60を下方向に回動させる。このとき、昇降フレーム90が斜め下方に移動するのに伴って、昇降フレーム90に左右の前後吊り具85、86を介して吊り下げられたハンモック状のシート70が斜め下方に移動する。こうして、ハンモック状のシート70は、その姿勢が略一定に保たれたまま移動するため、シート70に着座した使用者9が円滑に車椅子8に乗り移ることができる。
【0093】
こうして、使用者9がシート70を介して車椅子8に着座すると、左右の前後吊り具85、86がシート70から外される。これにより、使用者9が車椅子8を介して移動できる。
【0094】
以下、本発明の要旨と作用、効果を説明する。
【0095】
(ア)使用者9と一緒に走行する支援車1によって使用者9の歩行動作を支援する歩行支援機100であって、左右のドライブ車輪5と、この左右のドライブ車輪5を駆動する駆動装置50と、左右のドライブ車輪5が取り付けられ使用者9が内側に入って歩行するための支援フレーム2と、この支援フレーム2に取り付けられ操作力が入力される操作バー31と、操作バー31に入力される操作力に応じて駆動装置50の動力を制御するコントローラ30と、を備える構成とした。
【0096】
上記構成に基づき、歩行支援機100は、駆動装置50によって左右のドライブ車輪5に動力が与えられ、使用者9が操作バー31につかまって歩行しながら、使用者9から操作バー31に操作力が入力される。これにより、使用者9は直感的に歩行支援機100を操縦することが可能となる。この結果、使用者9に容易に操縦させることができ、使用者9の歩行支援ができる。
【0097】
(イ)操作バー31は、左右方向に延びる操作バー前部31Aと、この操作バー前部31Aの左右端から後方向に延びる左右の操作バー側部31Bと、を有し、左右の操作バー側部31Bの後方部が開放される構成とした。
【0098】
上記構成に基づき、使用者9が、開放された左右の操作バー側部31Bの間に入って歩行することが可能となり、使用者9が操作バー31につかまって歩行しながら、支援車1を操縦することが容易になる。
【0099】
(ウ)コントローラ30は、操作バー31に与えられる力の大きさと方向を検出値として検出する操作力検出手段と、この操作力検出手段で検出された検出値に応じて駆動装置50が左右のドライブ車輪5に与える動力を制御する動力制御手段と、を備える構成とした。
【0100】
上記構成に基づき、コントローラ30は、検出される操作バー31が押される力の大きさと方向に応じた動力を左右の電動モータ51にそれぞれ発生させ、支援車1の進行方向及び速度を制御する。
【0101】
(エ)操作力検出手段として、操作バー31に生じる略水平軸まわりのトルクを検出値として検出する前後方向トルクセンサ33と、操作バー31に生じる略鉛直軸まわりのトルク検出値としてを検出する旋回方向トルクセンサ34と、を備え、動力制御手段は、前後方向トルクセンサ33の検出値に応じて支援車1の停止、前進、後進を切り換えるとともに、旋回方向トルクセンサ34の検出値に応じて支援車1の左旋回、右旋回を切り換える構成とした。
【0102】
上記構成に基づき、前後方向トルクセンサ33と旋回方向トルクセンサ34の検出値に応じて、支援車1の停止、前進、後進、直進、左旋回、右旋回を的確に切り換えられる。
【0103】
(オ)使用者9が操作バー31を下方に押す動作によって、前後方向トルクセンサ33が支援車1を前進させる信号を出力する構成とした。
【0104】
上記構成に基づき、使用者9が操作バー31がつかまって歩行しながら、操作バー31を下方に押して支援車1を前進させられる。これにより、使用者9は直感的に支援車1を操縦して、使用者9が前方に歩行することを支援できる。
【0105】
(カ)使用者9が操作バー31を上方に引く動作によって、前後方向トルクセンサ33が支援車1を後進させる信号を出力する構成とした。
【0106】
上記構成に基づき、使用者9が操作バー31がつかまって歩行しながら、操作バー31を上方に引いて支援車1を後進させられる。これにより、使用者9は直感的に支援車1を操縦して、使用者9が後方に歩行することを支援できる。
【0107】
(キ)使用者9が操作バー31を右方向に押す動作によって、旋回方向トルクセンサ34が支援車1を左旋回させる信号を出力し、使用者9が操作バー31を左方向に押す動作によって、旋回方向トルクセンサ34が支援車1を右旋回させる信号を出力する構成とした。
【0108】
上記構成に基づき、使用者9が操作バー31がつかまって歩行しながら、操作バー31を左右方向に押して支援車1を旋回させられる。これにより、使用者9は直感的に支援車1を操縦して、使用者9が左右方向に歩行することを支援ができる。
【0109】
本発明は上記の実施形態に限定されずに、その技術的な思想の範囲内において種々の変更がなしうることは明白である。
【符号の説明】
【0110】
1 支援車
2 支援フレーム
5 ドライブ車輪(車輪)
30 コントローラ
31 操作バー
31A 操作バー前部
31B 操作バー側部
33 前後方向トルクセンサ
34 旋回方向トルクセンサ
50 駆動装置
100 歩行支援機
【技術分野】
【0001】
本発明は、使用者の歩行動作を支援する歩行支援機に関するものである。
【背景技術】
【0002】
従来から、主として下肢障害者の歩行訓練のために、歩行動作を支援する歩行支援機が用いられている。
【0003】
特許文献1には、使用者がシート(座部)に着座した状態から、平行リンク機構を用いてシートを上昇させる歩行支援機が開示されている。
【0004】
この歩行支援機は、使用者がシートに着座したまま脚を動かして歩行動作を行うためのものである。使用者がシートに着座した状態では、使用者の体重をシートが支持するため、歩行訓練中に使用者の下肢にかかる負担が軽減され、歩行動作が支援される。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2004−8464号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、このような従来の歩行支援機にあっては、歩行支援機がキャスタ車輪を介して走行するものであり、使用者が歩行支援機に推力を与える必要があるため、下肢障害者とってはこの歩行支援機によって歩行することが難しい場合があった。
【0007】
これに対処して、歩行支援機の車輪に動力を与えることが考えられるが、使用者が、歩行支援機につかまって歩行することと、歩行支援機の走行方向、速度を操縦することとを同時に行うことが難しいという問題点があった。
【0008】
本発明は上記の問題点に鑑みてなされたものであり、車輪に動力が与えられ、歩行支援機につかまって歩行する使用者が容易に操縦できる歩行支援機を提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明は、使用者と一緒に走行する支援車によって使用者の歩行動作を支援する歩行支援機であって、左右のドライブ車輪と、この左右のドライブ車輪を駆動する駆動装置と、左右のドライブ車輪が取り付けられ使用者が内側に入って歩行するための支援フレームと、この支援フレームに取り付けられ操作力が入力される操作バーと、操作バーに入力される操作力に応じて駆動装置の動力を制御するコントローラと、を備えることを特徴とする。
【発明の効果】
【0010】
本発明によれば、歩行支援機は、駆動装置によって左右のドライブ車輪に動力が与えられ、使用者が操作バーにつかまって歩行しながら、使用者から操作バーに操作力が入力される。これにより、使用者は直感的に歩行支援機を操縦することが可能となる。この結果、使用者に容易に操縦させることができ、使用者の歩行支援ができる。
【図面の簡単な説明】
【0011】
【図1】本発明の実施形態を示す歩行支援機の側面図である。
【図2】歩行支援機の平面図である。
【図3】歩行支援機の背面図である。
【図4】(A)、(B)、(C)は、操作バー等の平面図、正面図、側面図である。
【図5】左右の電動モータを制御する内容を示すフローチャートである。
【図6】(A)、(B)は、歩行支援機の動作を示す側面図である。
【発明を実施するための形態】
【0012】
以下、本発明の実施形態を添付図面に基づいて説明する。
【0013】
図1〜3に示す歩行支援機100は、主として下肢障害者の歩行訓練にて、歩行動作を支援するために用いられる。歩行支援機100は、路面(床面)上を走行可能な支援車1と、この支援車1に昇降可能に取り付けられる昇降フレーム90と、使用者9が着座可能なシート(座部)70と、昇降フレーム90にシート70を吊り下げる吊り具85、86と、シート70を昇降フレーム90に着脱可能に連結する連結手段と、を備える。
【0014】
歩行支援機100は、使用者9がシート70に着座したまま脚を動かして歩行動作を行うためのものである。使用者9が昇降フレーム90に吊り下げられるシート70に着座した状態では、使用者9の体重がシート70によって支持されるため、歩行訓練中に使用者9の下肢にかかる負担を軽減できる。
【0015】
以下、歩行支援機100の構造を説明する。ここで、互いに直交するX、Y、Zの3軸を設定し、X軸が略水平前後方向、Y軸が略水平横方向、Z軸が上下方向(略鉛直方向)に延びるものとする。
【0016】
図1は、歩行支援機100の側面図である。図2は、歩行支援機100の平面図であり、昇降フレーム90、後述する駆動装置50等が外された状態を示す。図3は、支援車1を後方から見た背面図であり、駆動装置50、後キャスタ車輪6等が外された状態を示す。
【0017】
図1に示すように、支援車1は、その本体として設けられる支援フレーム2を備える。支援フレーム2は、コの字形の下フレーム21及びU字形の上フレーム22と、これらを連結する左右の前後ポスト(ポスト)23、24と、を備える。
【0018】
前後ポスト23、24は、伸縮可能に嵌合する上下のパイプからなり、それぞれの長さを変えられる。前後ポスト23、24の上のパイプが上フレーム22に結合される。前後ポスト23、24の下のパイプが下フレーム21に結合される。これにより、使用者9の伸長等に応じて上フレーム22の高さを調節できる。そのため、シート70の高さを使用者9の身長に対して低めに調整すれば、使用者9の下肢に少しずつ負担をかけて歩行訓練を行うことも可能である。
【0019】
下フレーム21には、その中央部に配置される左右のドライブ車輪(車輪)5と、このドライブ車輪5より前方に配置される左右の前キャスタ車輪(車輪)4と、ドライブ車輪5より後方に配置される後キャスタ車輪(車輪)6と、が設けられる。
【0020】
左右のドライブ車輪5は、左右の駆動装置50によってそれぞれ駆動される。この駆動装置50は、電動モータ51と、この電動モータ51によって回転駆動されるローラ52と、このローラ52をドライブ車輪5に押し付けるローラ押し付け機構53と、を備える。このローラ押し付け機構53は、手動操作によってローラ52をドライブ車輪5に押し付けるドライブ位置と、ローラ52をドライブ車輪5から離すフリー位置と、に切り換えられる。なお、これに限らず、ドライブ車輪5の駆動装置は、電動モータの動力が、例えばギア、チェーン等を介して左右のドライブ車輪5の車軸に伝達される構成としてもよい。
【0021】
左右の前、後キャスタ車輪4、6は、支援車1が移動するのに伴って、当該前、後キャスタ車輪4、6の転がり摩擦抵抗により各車軸がZ軸まわりに回動して旋回し、進行方向を向くように操舵される。
【0022】
図2に示すように、上フレーム22は、パイプ材をU字形に曲げて形成される。上フレーム22は、Y軸方向に延びるフレーム前部22Aと、このフレーム前部22Aの左右端から曲げられX軸後方向へと延びる左右のフレーム側部22Bと、を有する。上フレーム22は、左右のフレーム側部22Bの後方部が開放される。
【0023】
下フレーム21は、図2に示す平面図上にてコの字形に形成され、支援車1の前部にてY軸方向(左右方向)に延びるクロスメンバ15と、このクロスメンバ15の左右端からX軸後方向に延びる左右のサイドメンバ16と、を備える。これにより、下フレーム21は、左右のサイドメンバ16の後方部が開放され、使用者9が下フレーム21の後部から下フレーム21の内側に入れる構成とする。これにより、使用者9が下フレーム21の内側に入って歩行できる。
【0024】
左右のドライブ車輪5は、X軸方向について支援車1の中央部に配置される。これにより、左右のドライブ車輪5が互いに逆回転することによって、歩行支援機100が使用者9が位置する支援車1の中央部を中心として旋回し、使用者9が移動することなくその場で向く方向を変えられる。
【0025】
クロスメンバ15には、左右の前キャスタ車輪4が取り付けられる。これにより、左右の前キャスタ車輪4は、支援車1の前端部に配置され、歩行支援機100が前方に倒れないように支持する。なお、左右一対の前キャスタ車輪4が設けられる構成に限らず、1つまたは3つ以上の前キャスタ車輪4が設けられる構成としてもよい。
【0026】
左右のサイドメンバ16は、クロスメンバ15の左右端からX軸後方向に延びる左右の第一サイドメンバ16Aと、この第一サイドメンバ16Aの外側に配置されてX軸後方向に延びる左右の第二サイドメンバ16Bと、を備える。
【0027】
左右の第一サイドメンバ16Aには、左右のドライブ車輪5の車軸が支持される。左右のドライブ車輪5は、X軸方向について支援車1の中央部に配置される。
【0028】
左右の第二サイドメンバ16Bは、その前端が湾曲して左右の第一サイドメンバ16Aに結合され、その中程がY軸方向に延びる左右のメンバ16Cを介して左右の第一サイドメンバ16Aに結合される。左右の第一サイドメンバ16Aと左右の第二サイドメンバ16Bとの間に、左右のドライブ車輪5がそれぞれ配置される。
【0029】
図3に示すように、左右の第二サイドメンバ16Bの後端部には、左右の後キャスタ車輪6がそれぞれ取り付けられる。こうして、左右の後キャスタ車輪6が左右のドライブ車輪5から十分に離して支援フレーム2の後端部に配置されることにより、図6の(A)に示すように、昇降フレーム90が後方にある状態でも、歩行支援機100が後方に倒れないように左右の後キャスタ車輪6によって支持される。なお、左右一対の後キャスタ車輪6が設けられる構成に限らず、1つまたは3つ以上の前キャスタ車輪6が設けられる構成としてもよい。
【0030】
左右の第二サイドメンバ16Bは、左右の第一サイドメンバ16Aの外側に左右のドライブ車輪5をそれぞれ挟むように配置される。こうして、Y軸方向について左右の後キャスタ車輪6の間隔が左右のドライブ車輪5の間隔より大きくなることにより、図2に2点鎖線で示すように、車椅子8が支援フレーム2の内側に余裕をもって進入できる。
【0031】
支援車1は、支援フレーム2に搭載されるバッテリ(図示せず)と、このバッテリから左右の電動モータ51に供給される電力を制御するコントローラ30と、このコントローラ30を操作する操作バー31と、を備える。使用者9が操作バー31に与える操作力に応じて、コントローラ30が左右の電動モータ51の動力(出力)を制御し、左右のドライブ車輪5に動力が与えられる。
【0032】
図1に示すように、使用者9が支援フレーム2の内側に入って歩行するときに、使用者9の両手に左右の操作バー側部31B(図4参照)がそれぞれ持たれる。操作バー31は、支援車1の内側で歩行する使用者9に持たれることにより、使用者9の体重を支えるとともに、使用者9によって上下方向、左右方向の操作力が与えられ、支援車1の走行方向、走行速度を変える操作が行われる。これにより、使用者9が支援車1につかまって歩行しながら、支援車1を操縦することが可能となり、歩行支援が行われる。
【0033】
図4の(A)、(B)、(C)は、操作バー31等の平面図、正面図、側面図である。コントローラ30は、前フレーム25を介して支援車1の前側中央部に固定される。前フレーム25は、前ポスト23の上のパイプを介して上フレーム22に結合され、上フレーム22と共にその高さが調節される。
【0034】
操作バー31は、パイプ材をU字形に曲げて形成され、同じくU字形の上フレーム22の上方に配置される。操作バー31は、Y軸方向に延びる操作バー前部31Aと、この操作バー前部31Aの左右端から曲げられX軸後方向へと延びる左右の操作バー側部31Bと、を有する。操作バー31は、左右の操作バー側部31Bの後方部が開放される。
【0035】
コントローラ30は、上方向に突出するコントロールロッド32を備え、このコントロールロッド32に操作バー前部31Aの中央部が結合される。
【0036】
コントローラ30は、使用者9が操作バー31に与える力の大きさと方向を検出する操作力検出手段と、この操作力検出手段の検出値に応じて左右の駆動装置50が左右のドライブ車輪5に与える動力をそれぞれ制御する動力制御手段と、を備える。
【0037】
コントローラ30は、操作力検出手段として、使用者9が上下方向に押す操作によって操作バー31に生じる略水平軸(横軸)まわりのトルクを検出する前後方向トルクセンサ33と、使用者9が左右方向に押す操作によって操作バー31に生じる略鉛直軸(縦軸)まわりのトルクを検出する旋回方向トルクセンサ34とを備える。
【0038】
動力制御手段は、前後方向トルクセンサ33によって検出されるトルク値(検出値)に応じて支援車1の停止、前進、後進を切り換える一方、旋回方向トルクセンサ34によって検出されるトルク値(検出値)に応じて支援車1の直進、左旋回、右旋回を切り換えて支援車1の進行方向を制御するとともに、検出されるトルク値が大きくなるのに応じて、支援車1の速度を高めるように制御する。
【0039】
以下、操作バー31の動きと前後方向トルクセンサ33、旋回方向トルクセンサ34が出力する信号との関係を説明する。
【0040】
1.図4の(C)に矢印(1)で示すように、使用者9が操作バー31を下方に押すと、コントロールロッド32が矢印(1´)で示すように後方に回動し、前後方向トルクセンサ33がこのトルク値に応じた前進信号を出力する。これにより、使用者9が操作バー31につかまって歩行しながら、操作バー31を下方に押して支援車1を前進させられ、前方への歩行支援が円滑に行われる。
【0041】
2.図4の(C)に矢印(2)で示すように、使用者9が操作バー31を上方に引くと、コントロールロッド32が矢印(2´)で示すように前方に回動し、前後方向トルクセンサ33がこのトルク値に応じた後進信号を出力する。これにより、使用者9が操作バー31につかまって歩行しながら、操作バー31を上方に引いて支援車1を後進させられ、後方への歩行支援が円滑に行われる。
【0042】
なお、これに限らず、例えば前後方向トルクセンサ33の組み付け方向を変えることによって、操作バー31を下方に押して支援車1を後進させ、操作バー31を上方に引いて支援車1を前進させる構成としてもよい。
【0043】
3.図4の(A)に矢印(3)で示すように、使用者9が操作バー31を右方向に押すと、コントロールロッド32が左方向に回動し、旋回方向トルクセンサ34がこのトルク値に応じた左旋回信号を出力する。これにより、使用者9が操作バー31につかまって歩行しながら、操作バー31を右方向に押して支援車1を左旋回させられ、左方向へ曲がる歩行支援が円滑に行われる。
【0044】
4.図4の(A)に矢印(4)で示すように、使用者9が操作バー31を左方向に押すと、コントロールロッド32が右方向に回動し、旋回方向トルクセンサ34がこのトルク値に応じた右旋回信号を出力する。これにより、使用者9が操作バー31につかまって歩行しながら、操作バー31を左方向に押して支援車1を右旋回させられ、右方向に曲がる歩行支援が円滑に行われる。
【0045】
なお、これに限らず、例えば旋回方向トルクセンサ34の組み付け方向を変えることによって、操作バー31を右方向に押して支援車1を右旋回させ、操作バー31を左方向に押して支援車1を左旋回させる構成としてもよい。
【0046】
前後方向トルクセンサ33は、所定の不感帯を有し、所定値以上のトルクが入力されるのに伴って前進信号、後進信号を出力する構成とする。なお、これに限らず、動力制御手段が、前後方向トルクセンサ33から所定値以上の前進信号、後進信号が出力されていることを判定し、前後方向トルクセンサ33から出力される信号が所定値より低い場合には、前後方向トルクセンサ33から前進信号、後進信号が出力されていないものと判定してもよい。
【0047】
同様に、旋回方向トルクセンサ34は、所定の不感帯を有し、所定値以上のトルクが入力されるのに伴って左右旋回信号を出力する構成とする。なお、これに限らず、動力制御手段が、旋回方向トルクセンサ34から所定値以上の左右旋回信号が出力されていることを判定し、旋回方向トルクセンサ34から出力される信号が所定値より低い場合には、旋回方向トルクセンサ34から左右旋回信号が出力されていないものと判定してもよい。
【0048】
図5は、コントローラ30が前後方向トルクセンサ33、旋回方向トルクセンサ34の出力信号(検出値)に応じて左右の電動モータ51を制御する内容を示すフローチャートである。以下、これについて説明する。
【0049】
まず、ステップS1で、前後方向トルクセンサ33と旋回方向トルクセンサ34の出力信号があり、操作バー31を動かす操作が行われたことを判定する。操作が行われた場合には、ステップS2に進み、操作が行われていない場合には、繰り返して操作バー31が操作されたか否かを判定する。
【0050】
ステップS2、S3では、前後方向トルクセンサ33から前進信号、後進信号が出力されているか否かを判定する。
【0051】
ステップS4〜S9では、旋回方向トルクセンサ34から左右旋回信号が出力されているか否かを判定する。
【0052】
ステップS2で、前進信号が出力されていると判定され、ステップS4で、左旋回信号が出力されていると判定された場合に、ステップS10に進んで、支援車1を左前方向に旋回させる。このとき、コントローラ30は、左右の電動モータ51をそれぞれ前進方向に回転させ、右の電動モータ51の回転速度を左の電動モータ51の回転速度より高める。
【0053】
ステップS2で、前進信号が出力されていると判定され、ステップS5で、右旋回信号が出力されていると判定された場合に、ステップS11に進んで、支援車1を右前方向に旋回させる。このとき、コントローラ30は、左右の電動モータ51をそれぞれ前進方向に回転させ、左の電動モータ51の回転速度を右の電動モータ51の回転速度より高める。また、左右の電動モータ51の回転速度比が制御されることにより、支援車1の旋回半径が変えられる。
【0054】
ステップS2で、前進信号が出力されていると判定され、ステップS4、S5で、左右旋回信号が出力されていないと判定された場合に、ステップS12に進んで、支援車1を前方向に直進させる。このとき、コントローラ30は、左右の電動モータ51をそれぞれ前進方向に同一速度で回転させる。
【0055】
ステップS2で、前進信号が出力されていると判定され、ステップS3で、後進信号が出力されていると判定され、ステップS6で、左旋回信号が出力されていると判定された場合に、ステップS13に進んで、支援車1を左後方向に旋回させる。このとき、コントローラ30は、左右の電動モータ51をそれぞれ後進方向に回転させ、右の電動モータ51の回転速度を左の電動モータ51の回転速度より高める。
【0056】
ステップS2で、前進信号が出力されていると判定され、ステップS3で、後進信号が出力されていると判定され、ステップS7で、右旋回信号が出力されていると判定された場合に、ステップS14に進んで、支援車1を右後方向に旋回させる。このとき、コントローラ30は、左右の電動モータ51をそれぞれ後進方向に回転させ、右の電動モータ51の回転速度を左の電動モータ51の回転速度より高める。
【0057】
ステップS2で、前進信号が出力されていると判定され、ステップS3で、後進信号が出力されていると判定され、ステップS6、S7で、左右旋回信号が出力されていないと判定された場合に、ステップS15に進んで、支援車1を後方向に直進させる。このとき、コントローラ30は、左右の電動モータ51をそれぞれ後進方向に同一速度で回転させる。
【0058】
ステップS2、S3で、前進信号、後進信号が出力されていないと判定され、ステップS8で、左旋回信号が出力されていると判定された場合に、ステップS16に進んで、支援車1をその場で左方向に旋回させる。このとき、コントローラ30は、左の電動モータ51を後進方向に回転させ、右の電動モータ51を前進方向に回転させ、左右の電動モータ51を同一速度で回転させる。
【0059】
ステップS2、S3で、前進信号、後進信号が出力されていないと判定され、ステップS9で、右旋回信号が出力されていると判定された場合に、ステップS17に進んで、支援車1をその場で右方向に旋回させる。このとき、コントローラ30は、左の電動モータ51を前進方向に回転させ、右の電動モータ51を後進方向に回転させ、左右の電動モータ51を同一速度で回転させる。
【0060】
こうして、支援車1は、操作バー31が動かされる方向に応じて支援車1を直進、旋回させる制御が行われる。操作バー31が動かされないときは、左右の電動モータ51の駆動が停止される。
【0061】
図1に示すように、歩行支援機100は、使用者9が着座可能なシート70と、このシート70から延びる左右の前後吊り具(吊り具)85、86と、この前後吊り具85、86の端部がそれぞれ連結される昇降フレーム90と、を備える。昇降フレーム90が前方に向けて上昇することにより、シート70に座った使用者9を吊り上げるようになっている。
【0062】
昇降フレーム90は、平行リンク機構60を介して支援フレーム2に昇降可能に支持される。平行リンク機構60を昇降するアクチュエータとして、左右の電動シリンダ65が設けられる。
【0063】
平行リンク機構60は、昇降フレーム90と支援フレーム2とにそれぞれ回動可能に連結される左右の前後リンク61、62を備える。
【0064】
前後リンク61、62の基端部(下端部)は、軸部61A、62Aを介してそれぞれ支援フレーム2の上フレーム22に回動可能に連結される。
【0065】
軸部61A、62Aとは、上フレーム22の下側に配置され、上フレーム22の上側に設けられる操作バー31と干渉しなようになっている。
【0066】
左右の軸部61A、62Aは、それぞれY軸方向に延び、互いにX軸方向(前後方向)について略等しい間隔を持つように配置される。
【0067】
前後リンク61、62の先端部(上端部)は、軸部61B、62Bを介してそれぞれ昇降フレーム90に回動可能に連結される。
【0068】
軸部61B、62Bは、昇降フレーム90の下側に配置され、昇降フレーム90の上側に使用者9の腕や手を載せるのに邪魔にならないようになっている。
【0069】
左右の軸部61B、62Bは、それぞれY軸方向に延び、互いにX軸方向(前後方向)について略等しい間隔を持つように配置される。
【0070】
前後リンク61、62は、略等しい長さを持ち、昇降フレーム90が上フレーム22と略平行(略水平)に保たれて、平行移動するようになっている。
【0071】
電動シリンダ65は、シリンダ65Aと、このシリンダ65Aから伸長するロッド65Bと、このロッド65Bが伸縮作動する動力を与える電動モータ65Cと、を備える。
【0072】
シリンダ65Aの基端部は、ピン66を介して前ポスト23の上のパイプに回動可能に連結される。前ポスト23の上のパイプには、X軸後方向に突出する支持部23Aが設けられ、この支持部23Aによってピン66が支持される。
【0073】
ロッド65Bの先端部は、ピン67を介して前リンク61に回動可能に連結される。前リンク61には、X軸後方向に突出する支持部61Cが設けられ、この支持部61Cによってピン67が支持される。
【0074】
左右の電動シリンダ65が同期して伸縮作動すると、左右のリンク61が軸部61Aを中心として回動し、昇降フレーム90が平行リンク機構60を介して昇降するようになっている。
【0075】
歩行支援機100には、左右の電動シリンダ65の作動を制御する操作器(図示せず)が設けられる。この操作器は、バッテリ(図示せず)の電力を左右の電動シリンダ65に供給し、左右の電動シリンダ65を互いに同期して伸縮作動させる。使用者9は、この操作器を操作して昇降フレーム90を昇降させる。
【0076】
電動シリンダ65は、作動停止時にその伸縮作動を規制するブレーキ機構(図示省略)を備える。よって、シート70に着座した使用者9の体重が平行リンク機構60を介して伝達されても、それによって収縮しない。したがって、昇降フレーム90を任意の高さに調整した後、電動シリンダ65の伸縮作動が停止すると、昇降フレーム90はその高さで固定される。
【0077】
なお、電動シリンダ65を用いるのではなく、例えば、左右のリンク61を直接回動させるアクチュエータをそれぞれの軸部61A、61Bに取り付けてもよい。
【0078】
昇降フレーム90は、上フレーム22及び操作バー31と同じく、パイプ材をU字形に曲げて形成される。昇降フレーム90は、Y軸方向に延びる昇降フレーム前部90Aと、この昇降フレーム前部90Aの左右端から曲げられX軸後方向に延びる左右の昇降フレーム側部90Bと、を有する。昇降フレーム90は、左右の昇降フレーム側部90Bの後方部が開放され、使用者9が昇降フレーム90の後部から昇降フレーム90の内側に入れる構成とする。
【0079】
図1に示すように、左右の電動シリンダ65が最伸長した状態で、昇降フレーム90は、上フレーム22及び操作バー31の上方に位置する。これにより、使用者9が昇降フレーム90及び支援フレーム2の内側に入った状態で、使用者9の腕や手を昇降フレーム90の上側に載せることができる。
【0080】
シート70は、左右の前後吊り具85、86を介して昇降フレーム90に着脱可能に連結される。左右の前後吊り具85、86の上端部は、昇降フレーム90から左右に突出する軸部61B、62Bにそれぞれ掛け回され、着脱可能に連結される。左右の前後吊り具85、86の下端部は、フック83、84を介してシート70に着脱可能に連結される。
【0081】
昇降フレーム90に対する前後吊り具85、86の連結部81、82は、左右の昇降フレーム側部90Bにそれぞれ設けられ、互いにX軸方向について間隔を持つように配置される。
【0082】
ハンモック状のシート70は、柔軟なシート材によって形成され、左右の前後隅部70A、70Bを有する。この前後隅部70A、70Bに左右の前後吊り具85、86の下端部がフック83、84を介して着脱可能に結合される。シート70は、これに使用者9が着座した状態で左右の前後吊り具85、86を介して4箇所で支持される。フック83、84は、シート70を昇降フレーム90に着脱可能に連結する連結手段を構成する。
【0083】
なお、シート70を昇降フレーム90に着脱可能に連結する連結手段は、これに限らず、昇降フレーム90に対する前後吊り具85、86の連結部81、82に、左右の前後吊り具85、86の上端部を昇降フレーム90に結合するフック等を設けてもよい。
【0084】
また、シート70は、ハンモック状のものに限らず、左右の吊り具を1本づつ設け、2箇所で支持されるブランコ状のものを用いてもよい。
【0085】
前後吊り具85、86は、例えば帯状のロープ等によって形成される。使用者9の伸長等に応じて、前後吊り具85、86の長さを調節するようにしてもよい。
【0086】
図6の(A)、(B)は、車椅子8に着座した使用者9が歩行支援機100に乗り移る様子を示している。
【0087】
図6の(A)に示すように、予め車椅子8にシート70を敷いて着座した使用者9が、歩行支援機100の内側に進入した状態にて、左右の前後吊り具85、86をシート70にそれぞれ連結する。このとき、左右の電動シリンダ65が収縮しており、昇降フレーム90は、下降した後方位置にある。使用者がシート70を介して車椅子8に着座した状態で、吊り具85、86の下端部を持ってフック83、84を介してシート70に連結することができる。
【0088】
続いて、使用者9が歩行支援機100に乗り移るときに、図6の(B)に示すように、左右の電動シリンダ65を伸長させて、矢印(5)で示すように、平行リンク機構60を上方向に回動させる。このとき、昇降フレーム90が斜め上方に移動するのに伴って、昇降フレーム90に左右の前後吊り具85、86を介して吊り下げられたハンモック状のシート70が斜め上方に移動する。こうして、ハンモック状のシート70は、その姿勢が略一定に保たれたまま移動するため、シート70に着座した使用者9が円滑に歩行支援機100に乗り移ることができる。
【0089】
図6の(B)に示すように、昇降フレーム90が、最上昇した状態で、昇降フレーム90は、上フレーム22及び操作バー31の上方に位置し、使用者9が昇降フレーム90及び支援フレーム21の内側に入った状態で歩行できる。このように、昇降フレーム90によってシート70が吊り上げられた状態では、使用者9の体重がシート70に支持されるため、歩行訓練中に使用者9の下肢にかかる負担が軽減され、歩行動作が支援される。
【0090】
使用者9の歩行時に、使用者9の両手に左右の操作バー側部31Bがそれぞれ持たれ、操作バー31に与えられる操作力に応じて左右のドライブ車輪5がそれぞれ駆動され、歩行動作が支援される。
【0091】
また、駆動装置50のローラ52をドライブ車輪5から離すフリー位置に切り換えられることにより、左右のドライブ車輪5が自由に回転する。この状態で、使用者9に支援車1が押されることによって移動する。
【0092】
使用者9が歩行訓練を終えて歩行支援機100から車椅子8に乗り移る場合に、図6の(B)に矢印(6)で示すように、平行リンク機構60を下方向に回動させる。このとき、昇降フレーム90が斜め下方に移動するのに伴って、昇降フレーム90に左右の前後吊り具85、86を介して吊り下げられたハンモック状のシート70が斜め下方に移動する。こうして、ハンモック状のシート70は、その姿勢が略一定に保たれたまま移動するため、シート70に着座した使用者9が円滑に車椅子8に乗り移ることができる。
【0093】
こうして、使用者9がシート70を介して車椅子8に着座すると、左右の前後吊り具85、86がシート70から外される。これにより、使用者9が車椅子8を介して移動できる。
【0094】
以下、本発明の要旨と作用、効果を説明する。
【0095】
(ア)使用者9と一緒に走行する支援車1によって使用者9の歩行動作を支援する歩行支援機100であって、左右のドライブ車輪5と、この左右のドライブ車輪5を駆動する駆動装置50と、左右のドライブ車輪5が取り付けられ使用者9が内側に入って歩行するための支援フレーム2と、この支援フレーム2に取り付けられ操作力が入力される操作バー31と、操作バー31に入力される操作力に応じて駆動装置50の動力を制御するコントローラ30と、を備える構成とした。
【0096】
上記構成に基づき、歩行支援機100は、駆動装置50によって左右のドライブ車輪5に動力が与えられ、使用者9が操作バー31につかまって歩行しながら、使用者9から操作バー31に操作力が入力される。これにより、使用者9は直感的に歩行支援機100を操縦することが可能となる。この結果、使用者9に容易に操縦させることができ、使用者9の歩行支援ができる。
【0097】
(イ)操作バー31は、左右方向に延びる操作バー前部31Aと、この操作バー前部31Aの左右端から後方向に延びる左右の操作バー側部31Bと、を有し、左右の操作バー側部31Bの後方部が開放される構成とした。
【0098】
上記構成に基づき、使用者9が、開放された左右の操作バー側部31Bの間に入って歩行することが可能となり、使用者9が操作バー31につかまって歩行しながら、支援車1を操縦することが容易になる。
【0099】
(ウ)コントローラ30は、操作バー31に与えられる力の大きさと方向を検出値として検出する操作力検出手段と、この操作力検出手段で検出された検出値に応じて駆動装置50が左右のドライブ車輪5に与える動力を制御する動力制御手段と、を備える構成とした。
【0100】
上記構成に基づき、コントローラ30は、検出される操作バー31が押される力の大きさと方向に応じた動力を左右の電動モータ51にそれぞれ発生させ、支援車1の進行方向及び速度を制御する。
【0101】
(エ)操作力検出手段として、操作バー31に生じる略水平軸まわりのトルクを検出値として検出する前後方向トルクセンサ33と、操作バー31に生じる略鉛直軸まわりのトルク検出値としてを検出する旋回方向トルクセンサ34と、を備え、動力制御手段は、前後方向トルクセンサ33の検出値に応じて支援車1の停止、前進、後進を切り換えるとともに、旋回方向トルクセンサ34の検出値に応じて支援車1の左旋回、右旋回を切り換える構成とした。
【0102】
上記構成に基づき、前後方向トルクセンサ33と旋回方向トルクセンサ34の検出値に応じて、支援車1の停止、前進、後進、直進、左旋回、右旋回を的確に切り換えられる。
【0103】
(オ)使用者9が操作バー31を下方に押す動作によって、前後方向トルクセンサ33が支援車1を前進させる信号を出力する構成とした。
【0104】
上記構成に基づき、使用者9が操作バー31がつかまって歩行しながら、操作バー31を下方に押して支援車1を前進させられる。これにより、使用者9は直感的に支援車1を操縦して、使用者9が前方に歩行することを支援できる。
【0105】
(カ)使用者9が操作バー31を上方に引く動作によって、前後方向トルクセンサ33が支援車1を後進させる信号を出力する構成とした。
【0106】
上記構成に基づき、使用者9が操作バー31がつかまって歩行しながら、操作バー31を上方に引いて支援車1を後進させられる。これにより、使用者9は直感的に支援車1を操縦して、使用者9が後方に歩行することを支援できる。
【0107】
(キ)使用者9が操作バー31を右方向に押す動作によって、旋回方向トルクセンサ34が支援車1を左旋回させる信号を出力し、使用者9が操作バー31を左方向に押す動作によって、旋回方向トルクセンサ34が支援車1を右旋回させる信号を出力する構成とした。
【0108】
上記構成に基づき、使用者9が操作バー31がつかまって歩行しながら、操作バー31を左右方向に押して支援車1を旋回させられる。これにより、使用者9は直感的に支援車1を操縦して、使用者9が左右方向に歩行することを支援ができる。
【0109】
本発明は上記の実施形態に限定されずに、その技術的な思想の範囲内において種々の変更がなしうることは明白である。
【符号の説明】
【0110】
1 支援車
2 支援フレーム
5 ドライブ車輪(車輪)
30 コントローラ
31 操作バー
31A 操作バー前部
31B 操作バー側部
33 前後方向トルクセンサ
34 旋回方向トルクセンサ
50 駆動装置
100 歩行支援機
【特許請求の範囲】
【請求項1】
使用者と一緒に走行する支援車によって使用者の歩行動作を支援する歩行支援機であって、
左右のドライブ車輪と、
前記左右のドライブ車輪を駆動する駆動装置と、
前記左右のドライブ車輪が取り付けられ使用者が内側に入って歩行するための支援フレームと、
前記支援フレームに取り付けられ、操作力が入力される操作バーと、
前記操作バーに入力される操作力に応じて前記駆動装置の動力を制御するコントローラと、を備えることを特徴とする歩行支援機。
【請求項2】
前記操作バーは、
左右方向に延びる操作バー前部と、
前記操作バー前部の左右端から後方向に延びる左右の操作バー側部と、を有し、
前記左右の操作バー側部の後方部が開放されることを特徴とする請求項1に記載の歩行支援機。
【請求項3】
前記コントローラは、
前記操作バーに与えられる力の大きさと方向を検出値として検出する操作力検出手段と、
前記操作力検出手段で検出された検出値に応じて前記駆動装置が前記左右のドライブ車輪に与える動力を制御する動力制御手段と、を備えることを特徴とする請求項1または2に記載の歩行支援機。
【請求項4】
前記操作力検出手段は、
前記操作バーに生じる略水平軸まわりのトルクを検出値として検出する前後方向トルクセンサと、
前記操作バーに生じる略鉛直軸まわりのトルクを検出値として検出する旋回方向トルクセンサと、を備え、
前記動力制御手段は、
前記前後方向トルクセンサの検出値に応じて前記支援車の停止、前進、後進を切り換えるとともに、前記旋回方向トルクセンサの検出値に応じて前記支援車の左旋回、右旋回を切り換えることを特徴とする請求項3に記載の歩行支援機。
【請求項5】
使用者が前記操作バーを下方に押す動作によって、前記前後方向トルクセンサが前記支援車を前進させる信号を出力することを特徴とする請求項1から4のいずれか一つに記載の歩行支援機。
【請求項6】
使用者が前記操作バーを上方に引く動作によって、前記前後方向トルクセンサが前記支援車を後進させる信号を出力することを特徴とする請求項1から5のいずれか一つに記載の歩行支援機。
【請求項7】
使用者が前記操作バーを右方向に押す動作によって、前記旋回方向トルクセンサが前記支援車を左旋回させる信号を出力し、
使用者が前記操作バーを左方向に押す動作によって、前記旋回方向トルクセンサが支援車を右旋回させる信号を出力することを特徴とする請求項1から6のいずれか一つに記載の歩行支援機。
【請求項1】
使用者と一緒に走行する支援車によって使用者の歩行動作を支援する歩行支援機であって、
左右のドライブ車輪と、
前記左右のドライブ車輪を駆動する駆動装置と、
前記左右のドライブ車輪が取り付けられ使用者が内側に入って歩行するための支援フレームと、
前記支援フレームに取り付けられ、操作力が入力される操作バーと、
前記操作バーに入力される操作力に応じて前記駆動装置の動力を制御するコントローラと、を備えることを特徴とする歩行支援機。
【請求項2】
前記操作バーは、
左右方向に延びる操作バー前部と、
前記操作バー前部の左右端から後方向に延びる左右の操作バー側部と、を有し、
前記左右の操作バー側部の後方部が開放されることを特徴とする請求項1に記載の歩行支援機。
【請求項3】
前記コントローラは、
前記操作バーに与えられる力の大きさと方向を検出値として検出する操作力検出手段と、
前記操作力検出手段で検出された検出値に応じて前記駆動装置が前記左右のドライブ車輪に与える動力を制御する動力制御手段と、を備えることを特徴とする請求項1または2に記載の歩行支援機。
【請求項4】
前記操作力検出手段は、
前記操作バーに生じる略水平軸まわりのトルクを検出値として検出する前後方向トルクセンサと、
前記操作バーに生じる略鉛直軸まわりのトルクを検出値として検出する旋回方向トルクセンサと、を備え、
前記動力制御手段は、
前記前後方向トルクセンサの検出値に応じて前記支援車の停止、前進、後進を切り換えるとともに、前記旋回方向トルクセンサの検出値に応じて前記支援車の左旋回、右旋回を切り換えることを特徴とする請求項3に記載の歩行支援機。
【請求項5】
使用者が前記操作バーを下方に押す動作によって、前記前後方向トルクセンサが前記支援車を前進させる信号を出力することを特徴とする請求項1から4のいずれか一つに記載の歩行支援機。
【請求項6】
使用者が前記操作バーを上方に引く動作によって、前記前後方向トルクセンサが前記支援車を後進させる信号を出力することを特徴とする請求項1から5のいずれか一つに記載の歩行支援機。
【請求項7】
使用者が前記操作バーを右方向に押す動作によって、前記旋回方向トルクセンサが前記支援車を左旋回させる信号を出力し、
使用者が前記操作バーを左方向に押す動作によって、前記旋回方向トルクセンサが支援車を右旋回させる信号を出力することを特徴とする請求項1から6のいずれか一つに記載の歩行支援機。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−70931(P2013−70931A)
【公開日】平成25年4月22日(2013.4.22)
【国際特許分類】
【出願番号】特願2011−214115(P2011−214115)
【出願日】平成23年9月29日(2011.9.29)
【出願人】(000000929)カヤバ工業株式会社 (2,151)
【公開日】平成25年4月22日(2013.4.22)
【国際特許分類】
【出願日】平成23年9月29日(2011.9.29)
【出願人】(000000929)カヤバ工業株式会社 (2,151)
[ Back to top ]