
歩行補助装置
【課題】二足歩行機能の補助に使用して歩行状態に応じて最適な加速の補助を図ることができる履物型の歩行補助装置を提供する。
【解決手段】本発明に係る歩行補助装置は、右足用の履体1と左足用の履体1とを具え、各履体1は、足裏を載置すべきベース部2と、該ベース部2の裏面側に配備されてベース部2を路面に沿って走行させるための1或いは複数の転動体5からなる走行機構と、該走行機構を駆動する駆動機構と、該ベース部2に配備されて二足歩行中のベース部の速度を計測する第1計測手段と、該ベース部2の表面に沿って配備されて足裏から受ける圧力を複数点にて計測する第2計測手段と、二足歩行中の人の腰の速度と加速度を計測する第3計測手段を具え、各履体に配備された走行機構の走行速度を、前記第1、第2、第3の計測手段により算出されるIZMP 、もしくは、圧力中心位置が、足裏の接地位置から逸脱しない範囲に設定することで二足歩行を補助する。
【解決手段】本発明に係る歩行補助装置は、右足用の履体1と左足用の履体1とを具え、各履体1は、足裏を載置すべきベース部2と、該ベース部2の裏面側に配備されてベース部2を路面に沿って走行させるための1或いは複数の転動体5からなる走行機構と、該走行機構を駆動する駆動機構と、該ベース部2に配備されて二足歩行中のベース部の速度を計測する第1計測手段と、該ベース部2の表面に沿って配備されて足裏から受ける圧力を複数点にて計測する第2計測手段と、二足歩行中の人の腰の速度と加速度を計測する第3計測手段を具え、各履体に配備された走行機構の走行速度を、前記第1、第2、第3の計測手段により算出されるIZMP 、もしくは、圧力中心位置が、足裏の接地位置から逸脱しない範囲に設定することで二足歩行を補助する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、二足歩行時に両足に履かせるべき左右一対の履体を具え、歩行者の歩行中の負担を軽減することが出来る歩行補助装置に関するものである。
【背景技術】
【0002】
従来、二足歩行を補助する装置としては、人の下肢に装着する外骨格型の装置本体を具えて人の足の動きを直接に補助する装置が一般的である(例えば特許文献1参照)。
【0003】
また、人が乗ることの可能な乗り物型の装置本体を具えて、人を運搬する同軸二輪車型の装置が多数提案されている(例えば特許文献2、3、4、5参照)。
【0004】
さらに、乗り物型の装置本体をローラースケートほどの大きさに縮小し、該装置本体に装着される足の動きに応じて、装置本体の制動を行なう歩行補助具が提案されている(特許文献6、7参照)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2010−075548号公報
【特許文献2】米国特許第005971091号公報
【特許文献3】特開2004−345030号公報
【特許文献4】特開2005−1554号公報
【特許文献5】特開2005−94898号公報
【特許文献6】特開2004−275525号公報
【特許文献7】特願2011−184823
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、従来の歩行補助装置は、人の脚の動きを直接に補助するシステムでは、システムが大型で、高コストな装置になる問題があった。また、特許文献6、7に記載された発明では、人の脚の動きから歩行を補助するタイミングを決定する機能しか備えておらず、人の様々な歩行状態に対応した適切な加速や減速の歩行補助を行なう加速度の判定手法が用意されていない問題があり、人の歩行動作を考慮した補助が不十分である問題があった。
【0007】
本発明は上記問題点に鑑みてなされたものであって、二足歩行機能の補助に使用して歩行能力の向上を図ることができる履物型の歩行補助装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明に係る歩行補助装置は、右足用の履体と左足用の履体とを具え、各履体は、足裏を載置すべきベース部と、該ベース部の裏面側に配備されてベース部を路面に沿って走行させるための1或いは複数の転動体からなる走行機構と、該走行機構を駆動する駆動機構と、該ベース部に配備されて二足歩行中のベース部の速度を計測する第1計測手段と、該ベース部の表面に配備されて足裏から受ける圧力を複数点にて計測する第2計測手段とを具え、各履体に配備された走行機構の走行速度を制御手段によって制御することにより、二足歩行を補助するものであって、前記制御手段は、二足歩行中に路面から離れている足について前記第1計測手段から得られる速度情報と、路面に着地している足について前記第2計測手段から得られる圧力情報とに基づいて、周期的な歩行状態が、路面に着地した足が路面から離れるまでの期間において走行速度を加速すべき加速期であるか、走行速度を定速に維持すべき定速期であるか、走行速度を減速すべき減速期であるかを判定し、その判定結果に応じて前記駆動機構に対する制御信号を生成する。
【0009】
人は二足歩行において、一歩ごとに加速と減速を繰り返して歩行しており、両足が着地した期間は加速と減速の双方が可能であり、片足支持状態に移行する直前の速度調整が行われる。又、片足のみが着地した期間の前半は、体全体の重心位置が支持脚の直上を通過するまで、歩行速度が減速される期間である。なお、体全体の重心位置が支持脚の直上に位置したとき瞬間的に進行方向へは加速も減速も行なうことが出来ず、体重を支えるために足裏全体に体重が均等にかかった状態である。その後、片足のみが着地した期間の後半は、体重が足裏全体に均等にかかった状態から足を後方へ蹴って前方への推進力を発生させるので、歩行速度は加速される。人の自然な歩行状態を妨げることなく歩行の補助を行なうには、足を後方へ蹴る加速状態では加速の補助を行ない、直後に減速状態になる両足支持期間や体幹より片足が前方にある片足支持による減速状態では減速の補助を行なうことが良い。
二足歩行中に、歩行者が片足を前方に着地させた状態からその足で路面を後方へ蹴って、その足を路面から離間させるまでの過程で、周期的な歩行が加速する加速期であるか、周期的な歩行が一定の平均速度を保つ定速期であるか、或いは周期的な歩行が減速する減速期であるかが、路面から離れている足(遊脚)の速度と、路面に着地している足から受ける圧力とに基づいて、正確に判定される。
【0010】
本発明に係る歩行補助装置によれば、二足歩行中の周期的な歩行における加速期、定速期、減速期の判別に応じて、駆動体により加速や減速の補助を適切に行うために、人の体幹の動きを正確に計測するために腰部の位置と加速度を計測する第3計測手段を具え、加速期と判定された場合には、駆動機構に対して周期歩行中に片足支持で後方へ足を蹴る加速状態にあるとき、腰の位置と脚の位置関係、および、足裏の圧力情報から車輪へ指示可能な最大加速度が決定され、駆動機構に対して加速の制御信号が供給され、定速期と判定された場合には、駆動機構に対して定速維持の制御信号が供給され、減速期と判定された場合には、駆動機構に対して周期歩行中の両足支持状態や片足支持で前方へ足を蹴る減速状態にあるとき、腰の位置と脚の位置関係、および、足裏の圧力情報から車輪へ指示可能な最大加速度が決定され、駆動機構へ減速の加速度の制御信号が供給される。これによって、駆動機構が供給された加速度に従って、加速、定速維持、若しくは減速のための駆動を行なって、走行機構を動作させる。
【0011】
具体的態様において、前記制御手段は、前記第1計測手段から得られる速度情報に基づいて二足歩行中に路面から離れている足の移動速度が基準値よりも増大しているか減少しているかを判別する第1の判別と、前記第2計測手段から得られる圧力情報に基づいて二足歩行中に路面に着地している足から受ける圧力の中心の移動速度が基準値よりも大きいか小さいかを判別する第2の判別と、前記第2計測手段から得られる圧力情報に基づいて二足歩行時に路面に着地している足から受ける圧力が踵側にて基準値よりも増大しているか爪先側にて基準値よりも増大しているかを判別する第3の判別とを実施し、これら3つの判別結果を統合することによって、二足歩行中の加速期、定速期及び減速期を判定する。
【0012】
尚、前記第1、第2及び第3の判別における各基準値としては、二足歩行中の各足の周期的な動きの1周期前の計測情報を採用し、有意な差があるか否かが判断される。
【0013】
又、具体的な態様において、前記制御手段は、前記3つの判別結果の統合を、K平均法を用いた非階層クラスタリングによって行なう。
又、前記制御手段は、前記非階層クラスタリングによって逐次学習を行なうことにより、二足歩行中の加速期、定速期及び減速期を判定する。
【0014】
更に具体的な態様において、前記制御手段は、前記第1の判別結果に関する限り、二足歩行中に路面から離れている足の移動速度が増大しているときは加速期、該移動速度が略一定のときは定速期、該移動速度が減少しているときは減速期であると判定する。
【0015】
又、前記制御手段は、前記第2の判別結果に関する限り、二足歩行中に路面に着地している足から受ける圧力の中心の移動速度が基準値よりも大きいときは加速期、該移動速度が基準値よりも小さいときは減速期であると判定する。
【0016】
又、前記制御手段は、前記第3の判別結果に関する限り、二足歩行中に路面に着地している足から受ける圧力が爪先側にて基準値よりも増大しているときは加速期、該圧力が踵側にて基準値よりも増大しているときは減速期であると判定する。
【0017】
前記判別方法にて決定された、加速期、減速期において、前記第3計測手段により取得された腰の位置を重心位置と仮定することで、重心位置に加わる加速度の釣り合いから計算される理想的な圧力中心位置であるIZMP (Imaginary Zero Moment Point)が得られる。歩行補助装置により重心へ進行方向に与えることのできる加速度の条件は、足裏が接地している領域内にIZMPを維持することの出来る加速度を求めることで得られる。また、最も効率よく歩行補助装置の加速補助を行なうためには、加速期の判定がされた場合、IZMPが後ろ足の接地する面の最後端に位置するための加速度が最大の加速度となり、減速期の判定がされた場合、IZMPが前足の接地する面の最前端に位置するための加速度が最大効率の減速を可能とする。
【0018】
又、前記制御手段は、前記第3計測手段を用いることができない場合、前記第2計測手段から得られる圧力情報に基づいて二足歩行中に路面に着地している足から受ける圧力の中心の結果をIZMPの代わりに利用して、加速期、および、減速期における最大効率の加速度を決定することが出来る。このとき、最も効率よく歩行補助装置の加速補助を行なうためには、加速期の判定がされた場合、足裏の圧力中心が後ろ足の接地する面の最後端に位置するための加速度が最大の加速度となり、減速期の判定がされた場合、前足の接地する面の最前端に圧力中心が位置するための加速度が最大効率の減速を可能とする。
【発明の効果】
【0019】
本発明に係る歩行補助装置によれば、二足歩行中の歩行者が何れか一方の足を路面に着地させた後、その足で路面を蹴って、前方へ一歩踏み出す過程で、歩行の補助なしに自然歩行する場合に周期的な歩行が減速期であるときは、周期歩行中の両足支持状態や片足支持状態において体幹が接地脚より後方にある場合、体幹の位置、および、足裏に加わる圧力分布の情報に応じて走行機構を適切な加速度で減速し、周期的な歩行が定速期であるときは、走行機構は定速を維持し、周期的な歩行が加速期であるときは、周期歩行中の片足支持状態において体幹が接地脚より前方にある場合、減速時と同じく体幹の位置、および、足裏に加わる圧力分布の情報に応じて走行機構を適切な加速度で加速し、この減速、定速維持及び加速が自然歩行する場合の周期的な加速と減速,および、定速の判定により左右の足で交互に実行され、かつ、判定された加速度の結果に対応して周期歩行中の加速状態、減速状態において走行機構の適切な加速と減速を行うため、歩行者は自然歩行時と変わらぬ歩行を行いながら自然歩行時よりも効率の良い加速と早い速度で歩行することが出来、歩行能力の向上を図ることが出来る。
【図面の簡単な説明】
【0020】
【図1】図1は、本発明の一実施形態である歩行補助装置の側面図である。
【図2】図2は、該歩行補助装置における複数の圧力センサーの配置を示す図である。
【図3】図3は、該歩行補助装置における制御の手続きを示すフローチャートである。
【図4】図4は、モータの速度制御を説明するブロック図である。
【図5】図5は、遊脚側の足の速度の時間変化を示すグラフである。
【図6】図6は、足裏から受ける圧力分布の中心位置の時間変化を示すグラフである。
【図7】図7は、爪先側に配置された圧力センサーによって計測される圧力の時間変化を示すグラフである。
【図8】図8は、踵側に配置された圧力センサーによって計測される圧力の時間変化を示すグラフである。
【図9】図9は、歩行サイクルにおける片方の履体の状態遷移を示す図である。
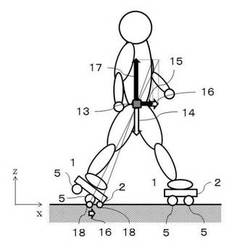
【図10】図10は、歩行補助装置を用いた二足歩行の様子を示す図である。
【図11】図11は、二足歩行の様子を説明する図である。
【図12】図12は、重心の加速度とIZMPの関係を説明する図である。
【図13】図13は、足裏の圧力中心とIZMPの時間変化を示す図である。
【発明を実施するための形態】
【0021】
次に、本発明の実施の形態につき、図面に沿って具体的に説明する。
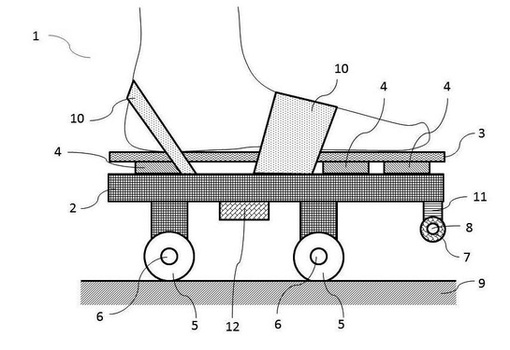
本発明の一実施形態である歩行補助装置は、図1に示す如く、両足のそれぞれに履かせるべき履体1を具え、履体1は、足裏を載置すべきベース部2を具えている。ベース部2の裏面側には、前後2本の車軸6の両端に取り付けられた前後左右4つの車輪5が配備されると共に、前方端には、車軸8によって回転可能に支持された補助輪7が配備されている。
【0022】
又、ベース部2の裏面には、加速度センサー・ジャイロセンサー12と、補助輪7が路面9に着地した状態を検知するための接触センサー11が配備されている。
【0023】
ベース部2の表面には、複数の圧力センサー4が分散して配備され、これらの圧力センサー4はシート3によって覆われている。又、ベース部2の表面には、シート3上に足を拘束するための締結ベルト10が取り付けられている。
【0024】
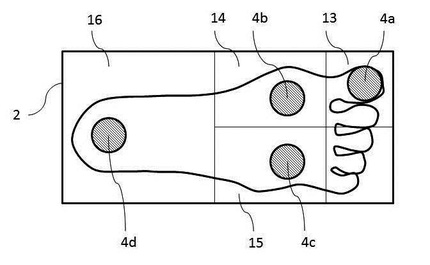
前記複数の圧力センサー4は、図2に示す様に、ベース部2上の足の親指に対応する第1領域13と、親指関節の付け根に対応する第2領域14と、薬指関節の付け根に対応する第3領域15と、踵に対応する第4領域16とに、それぞれ1つずつ配置されている。
【0025】
図1に示す2本の車軸6はそれぞれサーボモータ(図示省略)に繋がっており、該モータは、制御回路(図示省略)からの速度制御信号によって前進方向に回転駆動される。そして、モータの回転速度は、ロータリエンコーダ(図示省略)によって検出される。
【0026】
前記圧力センサー4、加速度センサー・ジャイロセンサー12、接触センサー11、及びロータリエンコーダからの信号は、前記制御回路に供給され、これに応じて制御回路は速度制御信号を生成する。
【0027】
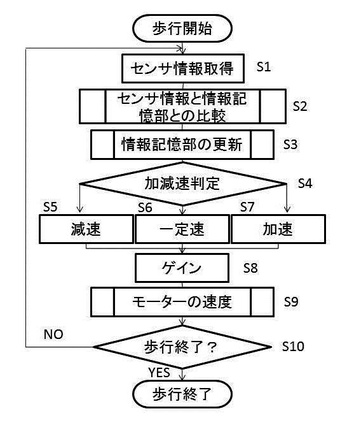
図3は、前記制御回路による制御手続きを表わしている。
歩行が開始されると、先ずステップS1では、センサー情報を取得し、ステップS2では、センサー情報と情報記憶部との比較を行なう。ここで、情報記憶部には、歩行補助なしの自然歩行におけるセンサー情報や、歩行補助を行なった場合の過去のセンサー情報が格納されている。
【0028】
次にステップS3では、取得されたセンサー情報によって情報記憶部の更新を行ない、ステップS4では、後述する加減速の判定を行なう。ここで、減速が判定されたときは、ステップS5にて減速の指令を発する。又、定速が判定されたときは、ステップS6にて定速維持の指令を発する。又、加速が判定されたときは、ステップS7にて加速の指令を発する。
【0029】
続いて、ステップS8にて後述するIZMP、および、足裏の圧力中心位置を使った加速度の決定を行なって、モータに対する角速度指令を生成した後、ステップS9では、角速度指令に応じてモータの回転速度を制御する。その後、ステップS10にて、歩行が終了したか否かを判断し、ノーの場合はステップS1に戻って同じ手続きを繰り返す。ステップS10にてイエスと判断されたときは歩行制御を終了する。
【0030】
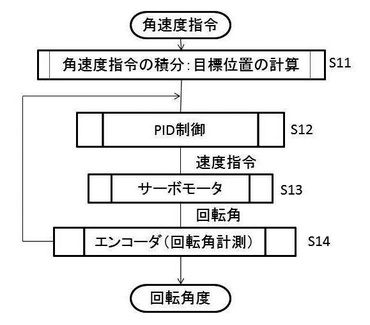
図4は、前記ステップS9におけるモータの速度制御を表わしている。
先ずステップS11では、角速度指令の積分を行なって目標位置を計算する。次にステップS12では、PID制御によって速度指令を生成する。更にステップS13では、速度指令をサーボモータへ供給する。そして、ステップS14では、サーボモータの回転がロータリエンコーダに伝えられ、モータの回転角度が計測される。
【0031】
尚、PID制御において、位置誤差としては、角速度指令の積分による目標位置と、エンコーダによって計測される回転角度から計算される現在位置との差を計算する。又、速度誤差としては、角速度指令と、エンコーダによって計測される回転角度の差分から計測される角速度との差を計算する。
【0032】
以下、図3のステップS4で実行すべき加減速の判定について説明する。
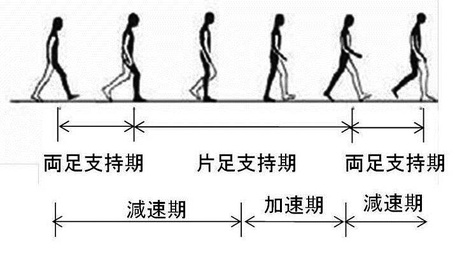
先ず図11に基づいて、二足歩行における周期歩行中の減速と加速について説明する。二足歩行においては、両足によって体重を支持する両足支持期と、片足によって体重を支持する片足支持期とが交互に繰り返される。
【0033】
人は二足歩行において、一歩ごとに加速と減速を繰り返して歩行しており、両足支持期は次の片足支持状態へ移行するための速度を調整する期間であるが、加速と減速の2状態へ簡略化することを考えた場合、減速状態であると判定することが出来る。又、片足支持期の前半は、体幹が支持脚の後方にあり体重が踵にかかった状態から体幹が支持脚の直上に位置し体重が足裏全体に均等にかかるまでは、減速状態であると判定することが出来る。その後、片足支持期の後半は、体幹が支持脚の前方へ位置し体重が足裏全体に均等にかかった状態から足を後方へ蹴って前方への推進力を発生させるので、加速状態であると判定することが出来る。
【0034】
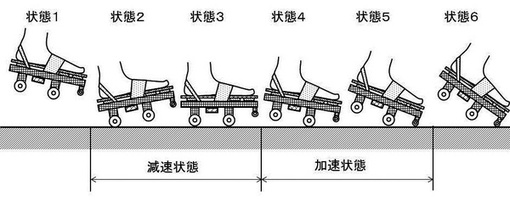
図9に示す如く、歩行補助装置を装着した状態での二足歩行においては、前後の車輪が路面から離れた状態1から、踵側の車輪が着地した状態2と、前後の車輪が着地して足裏全体に均等に体重がかかった状態3と、踵側の車輪が路面から離間して爪先側の車輪が着地した状態4と、更に前方へ傾斜して爪先側の車輪と前方の補助輪とが着地した状態5とを経て、爪先側の車輪が路面から離間した状態6に至る。
【0035】
なお、図9に記載の歩行補助装置の動きは、一例を示したもので、着地の姿勢が状態2以外でも可能であり、それらの状況は圧力センサー4と加速度センサー・ジャイロセンサー12からの情報で判断することが可能である。同じく、前後の車輪が路面から離間するタイミングも図9の6番目の状態に限らず、圧力センサー4と加速度センサー・ジャイロセンサー12からの情報で判断することが可能である。
【0036】
人の自然な歩行状態を妨げることなく加速と減速の補助を行なうには、通常歩行の加速と減速が行われる状態で補助装置の加速と減速を行なうことが良い。
そこで、本発明の走行補助装置においては、複数の圧力センサー4と加速度センサー・ジャイロセンサー12とから得られる信号に基づいて、周期的な歩行の減速期、加速期、定速期の判定を行ない、その判定結果に基づいて、周期歩行中の加速状態や減速状態に前記モータに対する加速や減速および定速維持の制御信号を生成する。
【0037】
具体的には、加速度センサー・ジャイロセンサー12から得られる計測データに基づいて、二足歩行中に路面から離れている遊脚側の足の移動速度が基準値よりも増大しているか減少しているかを判別する第1の判別と、複数の圧力センサー4から得られる計測データに基づいて、二足歩行中に路面に着地している足から受ける圧力の中心位置の移動速度が基準値よりも大きいか小さいかを判別する第2の判別と、複数の圧力センサー4から得られる計測データに基づいて、二足歩行時に路面に着地している足から受ける圧力が踵側にて基準値よりも増大しているか爪先側にて基準値よりも増大しているかを判別する第3の判別とを実施する。
【0038】
圧力センサー4を用いた人の歩行の加減速の判別において、足裏の圧力中心は、各圧力センサー4の計測値から計算されるものであり、各圧力センサー4の計測情報を比較すると、歩き出しや加速期には、爪先で計測される圧力が他の足裏着地部より大きな値を示し、かつ、定速歩行しているときの圧力分布と比較すると、爪先で計測される圧力が大きく、圧力が加わる持続時間が長く計測されるため、加速の判別をする。
減速期には、踵部の計測圧力が他の着地部よりも大きくなり、かつ、定速歩行しているときより踵の圧力が大きく持続時間が長く計測されるため、減速の判別をする。
【0039】
また、圧力中心の変化は、定速歩行時と比べて、爪先へ圧力中心が移行する時間が早く、かつ、爪先に位置する時間の割合が長くなるとき、加速期と判別をする。踵付近に圧力中心が維持される時間が定速歩行しているときよりも長くなり、かつ、爪先へ圧力中心が移行する時間が定速歩行しているときよりも遅くなるとき、減速期と判別をする。
【0040】
加速度センサー・ジャイロセンサー12を用いた人の歩行の加減速の判別においては、図9に記載される状態1から状態2を経て状態3に支持脚の状態が変化するときの反対側の足が空中を移動する遊脚期において、遊脚側の履体1に搭載される加速度センサー・ジャイロセンサー12から計測される加速度と角速度情報から、図9に記載の4番目の加速の補助を行なう状態に入る直前までの遊脚の平均移動速度と平均角速度を算出し、1歩前の平均速度と平均角速度と比較し、速くなっているとき、加速期と判別し、遊脚の平均移動速度と平均角速度が、1歩前の平均速度と平均角速度と比較し、遅くなっているとき、減速期と判別する。
【0041】
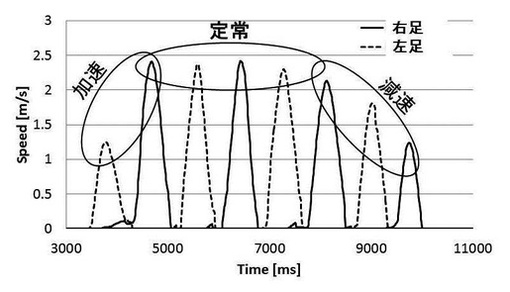
図5は、加速度センサー・ジャイロセンサー12によって計測される遊脚側の足の移動速度(スイング速度)の時間変化を表わしている。ここで、速度のピークが増大している期間は加速期、速度のピークが略一定の期間は定速期、速度のピークが減少しているときは減速期であると判別することが出来る。
より具体的にはスイング速度のピーク値を1歩行サイクル前のスイング速度のピーク値と比較して、スイング速度のピーク値が1歩行サイクル前のスイング速度のピーク値よりも有意に高いときは加速期、スイング速度のピーク値が1歩行サイクル前のスイング速度のピーク値よりも有意に低いときは減速期と判別することが出来る。
【0042】
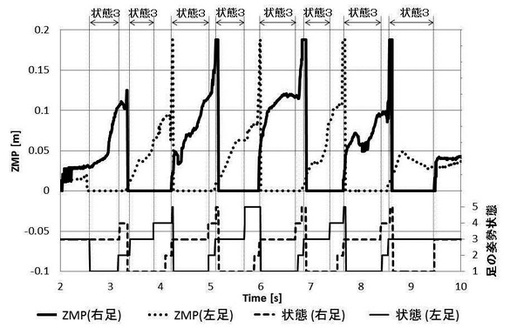
図6は、右足と左足について、複数の圧力センサー4によって計測される足裏圧力の中心位置(ZMP:Zero Moment Point)の変化を表わしている。縦軸の原点(0mm)は、踵側の圧力センサー4dの位置に対応し、爪先側の圧力センサー4aの位置(0.185mm)に向かって、圧力分布が遷移している。
図6において、縦の破線で囲まれた区間は図9記載の状態3を示しており、歩行中の片足支持期における減速から加速に転じる期間であるため、この期間におけるZMPの変化に基づいて、加速期、減速期、定速期を判別することが出来る。
【0043】
図6から明らかなように、歩き出しの加速期には他の期間に比べて支持脚の着地時間に対して爪先へZMPが移行する時間が早く、歩き終わりの減速期には踵付近にZMPが維持される時間が長くなり、爪先へZMPが移行する時間が遅くなる。減速期には爪先を着地せずに減速していることがあるため、その場合はZMPが爪先まで移行しない。この結果から、爪先へZMPが移行する時間が早ければ加速期間であり、遅ければ減速期間であると判別することが出来る。
【0044】
より具体的には、ZMPの変化は,現在の歩行サイクルにおけるZMPの移動速度が爪先立ちの姿勢になるまでの最大値(若しくは爪先までの移動時間)と1歩行サイクル前のZMPの移動速度の最大値(若しくは爪先までの移動時間)を比較して、増える方向へ有意な差(ある閾値以上)があった場合は、加速期間と判別する。同様に、減速期間である両足支持期間の直前までの現在の歩行と1サイクル前の歩行のZMPの変化を比較して、減る方向へ有意な差があった場合は減速期間と判別する。
【0045】
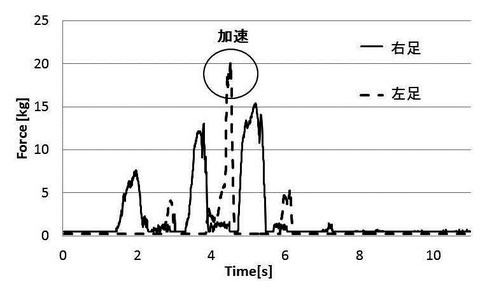
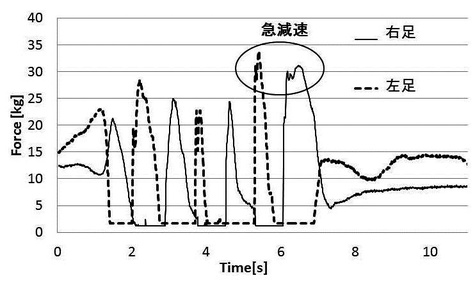
図7は、爪先側に配置された圧力センサー4aによって検出される圧力の時間変化を示すグラフであり、図8は、踵側に配置された圧力センサー4dによって検出される圧力の時間変化を示すグラフである。
加速期には、爪先側に配置された圧力センサー4aによって検出される圧力が他の状態の歩行時の圧力よりも大きいことが確認でき、減速時には、踵側に配置された圧力センサー4dによって検出される圧力が他の状態の歩行時の圧力よりも大きいことが確認できるので、爪先側の圧力が大きければ、加速期であると判別することが出来、踵側の圧力が大きければ、減速期であると判別することが出来る。
【0046】
より具体的には、1歩行サイクル前の最大の圧力と比較して、踵側の圧力が大きく計測された場合は減速期と判別し、爪先側の圧力が大きく計測された場合は加速期と判別する。
【0047】
但し、踵側の圧力が大きく計測されるときには、既に自然歩行における周期歩行中の減速状態である両足支持期間であるので、1サイクル前の両足支持期間での最大値との比較となり、1サイクル前の両足支持期間の最大の踵側圧力よりも閾値を超えて大きくなったときは緊急の減速の意思があると判定し,両足支持期と直後の片足支持期前半の減速状態において車輪の減速の指示を与える。又、加速の時も爪先側に大きな圧力がかかるときは既に爪先立ちをしている自然歩行における周期歩行中の加速状態である場合が多いため、1サイクル前の最大の爪先側圧力と比較して、現在の爪先側圧力が閾値を超えて大きくなっていたと判断された場合、現在の爪先立ちをしている加速状態の途中から車輪の加速の指示を与える。
【0048】
そして、遊脚側の足のスイング速度による第1の判別(図5)と、ZMPの移動速度による第2の判別(図6)と、踵側と爪先側の圧力による第3の判別(図7、図8)とを統合することによって、二足歩行中の加速期、定速期及び減速期を判定する。
【0049】
3つの判別結果の統合には、K平均法を用いた非階層クラスタリングによる逐次学習(堂本直揮、小澤隆太:「逐次学習型歩行相判別アルゴリズムの開発:」,11回システムインテグレーション部門講演会(SI2010)講演論文集,pp.217−220,(2010)参照)を用いて、二足歩行中の加速期、定速期及び減速期の判定を行なう。
ここで、逐次学習された結果は、図3のステップS3における「情報記憶部の更新」にて反映される。
【0050】
xhを踵側にかかる圧力、xtを爪先側に掛かる圧力、xdを脚のスイング速度の差、xiを足裏圧力から計算されるZMPとする。また、それぞれのクラスタ平均をuh、ut、ud、uiとしたとき、n回目に計測された値の4次元ベクトルをxn=[xh xt xd xi]n、クラスタ平均をu(j)=[uh ut ud ui]とする。但し、jは加速、定速、減速の3つのクラスタに分けられるとし、ここではj=1,2,3と与えることとする。このときK平均法の考え方からクラスタリングされた結果phinとクラスタ平均の更新を次式のように行なう。
【0051】
phin=argmin(||xn−u(j)||) (j=1,2,3)
un(j)=un(j)+f(phin)(xn−un(j))
if j=phin
f(phin)=0.01
else
f(phin)=0
【0052】
圧力センサー4及び加速度センサー・ジャイロセンサー12の計測情報から判断される加減速の指令(aw)は、例えば、圧力変化の評価式(Vp)、足裏圧力から計算される圧力中心の評価式(Vz)、遊脚の平均速度の評価式(Vm)からなる下記の式で統一して判断することができる。
【0053】
aw=Kp*Vp+Kz*Vz+Km*Vm
但し、Kp、Kz、Kmは合成するための重み係数である。また、車輪5の速度Vwはゼロ以上とし、車輪5による加減速awは人が転倒しないと判断される上限を超えないように下記の方法に従い設定される。
【0054】
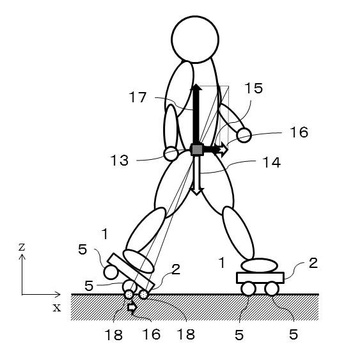
図12は第3計測手段である腰の位置に配置したセンサーの場所を重心位置(xcog, zcog)と仮定し、重心に加わる進行方向加速度と垂直方向加速度、及び、重力加速度から算出されるIZMPの位置関係を示している。重心に加わる重力加速度をg、と支持脚の蹴り力による進行方向の加速度をax、垂直方向の加速度をaz、駆動体による加速度をawとしたとき、ベクトルの合成をした方向と床面との交点がIZMPの位置となる。IZMPを足裏の接地領域内で決定することで、床面からの蹴り力を効率的に重心位置に伝えることが可能になるため、車輪による最大の加速度awmaxを得るためのIZMPの位置xlimは接地領域内の最後部となる。減速を行う場合、最大効率の減速を得るためのIZMPの位置xlimは接地領域内の最前部となる。前述の加速期、減速期の脚位置の関係から最大加速の上限として与えられる具体的なxlimの位置は、図9中の状態5における前輪の位置となり、最大減速を得るための具体的なxlimの位置は、図9中の状態3における前輪の位置に設定することが出来る。より具体的に、車輪の加速度awmaxは下記の式で統一して表すことが出来る。
【0055】
awmax = (xcog - xlim)(az + g) / zcog - ax
実際に上式を利用する場合、第2の計測手段により足の位置を計測して、その足の位置からIZMPの移動可能範囲であるxlimを決定する。そして、腰に取り付けられた第3の計測手段により腰の位置(xcog, zcog)と加速度(ax, az)を取得することで現在の歩行状態における最大加速度が決定される。
【0056】
前記加速度決定の際に利用していた腰部の第3計測手段が利用できない場合、第2の計測手段から得られる足裏の圧力中心(ZMP)に従って、簡易的に加速度の上限を定めることが出来る。i番目の圧力センサーの位置をxp(i)、i番目のセンサーで計測された値をf(i)としたとき、圧力中心の位置xzmpは次のように計算される。
【0057】
xzmp=Σxp(i)f(i)/Σf(i)
【0058】
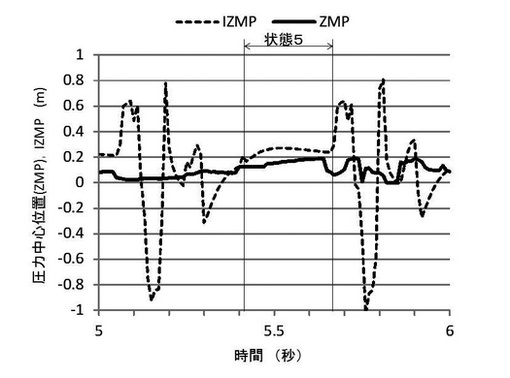
図13は、上式で計算された圧力中心の位置とIZMPの位置の変化を示した図である。圧力センサーで計測された圧力中心は足裏の範囲を超えることはなく、IZMPよりも小さな値であるので、最大の加速度はIZMPを利用した時も小さく計算されてしまう。しかし、理想的な最大値であるIZMPを超えることはないため、安全に加速を行える最大値として利用することが出来る。
【0059】
圧力中心を使った加速度の限界は、駆動体による加速がない場合の釣り合い式と駆動体により重心へ加速が加わった場合の釣り合い式の2つを利用することで簡易な式で表すことが出来る。まず、駆動体による加速がないときの釣り合いは圧力中心x0についての釣り合い式から次の式で表される。
【0060】
zcog・ax=(g+az)(xcog−x0)
【0061】
駆動体により重心へ加速が加わり、圧力中心がxzmp変化した時の釣り合いは次の式で表される。
【0062】
zcog(ax−aw)=(g+az)(xcog−x0−xzmp)
【0063】
上記2つの式を用いて車輪の加速度の上限awmaxは次の式で求められる。
【0064】
awmax=(g+az)・xzmp/zcog
垂直方向の加速度azはほとんど変化しないと仮定することで、圧力センサー
で計測されるZMPの値から最大加速度を決定することが出来る。
【0065】
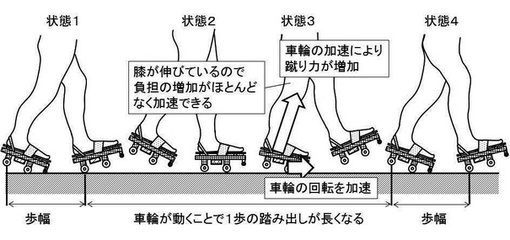
本発明に係る歩行補助装置によれば、履体1に配備された車輪5の回転制御により、歩行者が地面を蹴る力の補助と歩行速度の補助を行なうことが出来、例えば図10の如く、加速期には車輪が加速することによって蹴り力が増加すると共に、1歩の踏み出し距離が長くなる。
又、本発明に係る歩行補助装置によれば、大掛かりな装置に比べてコストが安くなり、かつ、様々な利用者の自然な歩行のままで移動能力を効率よく補助することが出来る。
【実施例】
【0066】
以下のようにして歩行補助装置を構成し、人の歩行を補助することが可能である。
カーボンプレートで作製したベース部2に速度指令可能なモータドライバとDCモータ(たとえば、マクソン製)を取り付け、図1の前後にある車輪5を駆動するためにベルトでDCモータと車輪5を繋ぎ、前後の車輪5が同じ速度で回転するように構成する。
【0067】
ベース部2上部に薄型圧力センサー(ニッタ株式会社Flexi Force)を図2に記載のように、踵部、前足部の左右、および、足趾部の親指が接触する箇所に設置し、圧力センサー4の上部にカーボンプレート製のシート3を取り付けることで、人の歩行時の圧力情報を読み取ることができる。
【0068】
また、ベース部2の下に3軸加速度センサーとジャイロセンサーを含んだモーションセンサー(株式会社ゼットエムピー IMU−Z)を取り付けることで、歩行補助装置の位置と傾きを計測でき、人が意図する加速や減速する状況や歩行補助装置が加速と減速を行なうことが可能な状況を判別することができる。
センサー情報に基づくモータの速度制御は、例えば身体に装着可能なマイクロコンピュータによって行なうことが出来る。
【0069】
さらに、人の腰部には重心位置計測用の3軸加速度センサーとジャイロセンサーを含んだモーションセンサー(株式会社ゼットエムピー IMU−Z)を取り付けることで重心の位置と加速度を計測でき、歩行補助装置の位置計測結果と合わせて、歩行状態に合わせた最適な加速度を算出するために利用することが出来る。
【0070】
車輪5による加速と減速の補助は、図10に記載の1番目のように両足で支持された状態のとき腰は前足よりも必ず後方に存在するため減速可能な最適な加速度を重心位置と重心位置の加速度、および、前足の位置から算出を行ない、人の歩行意図が減速と判定されたときに効率良い加速度を即時に与えられるように備える。また、片足支持状態で図9に記載の2番目と3番目の状態では人の腰は支持脚より後方に位置する期間のため前記同様に最適な減速を行なうための加速度の計算を行い、片足指示状態で図9記載の4番目と5番目の状態では人の腰は支持脚より前方に位置する期間があるため最適な加速を行なうための加速度計算を重心位置と重心位置の加速度、および、後ろ足の位置から算出を行ない、人の歩行意図が減速と判定されたときに効率良い加速度を即時に与えられるように備える。これによって、歩行補助装置による加速と減速が人の歩行状態に同期した最適な補助がされることになる。
【0071】
尚、歩行補助装置搭載の圧力センサー4、加速度センサー・ジャイロセンサー12及び腰部搭載の加速度センサー・ジャイロセンサーは、ADボードに直接つないで計測するので、1000Hz以上の計測周期でデータを取得することが可能であるが、100Hz程度のサンプリング周期であっても20点での計測が可能であり,判断の遅れも0.01秒程度で、動作に支障をきたすことはない。
【0072】
各センサーの値は常に計測し続けており,各判定では計測データを前回の歩行サイクルの計測データと比較する。ここで、ZMPの移動速度については、1歩行サイクル前のZMPの移動速度の最大値(もしくは,ZMPが踵から爪先に到達するまで時間)を保存しておき,現在の歩行サイクルと比較する。踵側と爪先側の圧力については、1歩行サイクル前の踵と爪先の圧力センサーの値の最大値を保存しておき,現在の歩行サイクルで各圧力センサーの値と比較する。又、遊脚スイング速度については、1サイクル前の足のスイング速度の最大値を保存しておき,現在の歩行サイクルにおける脚のスイング速度を比較する。
【0073】
尚、歩き始めの制御においては、1サイクル前の歩行としてのデータがないので、1歩踏み出すまでは計測のみを行なってデータを蓄積し,次(2サイクル目)の足を踏み出すときに1サイクル目のZMPの最大移動速度、踵側及び爪先側の圧力の最大値、及び遊脚のスイング速度の最大値を比較しながら2サイクル目の加速期である爪先立ちの状態5に車輪の加速を行なうべきかを判断する。
【0074】
又、歩き終わりの制御においては、通常の減速の判断の他に,足の位置が左右で同じ位置になったときに減速判別をする方法が採用可能である。両足を揃えているときは止まる意思があると判定することが可能である。歩行を継続し徐々に減速するときは,通常の減速タイミングの制御のみでの減速をしていくことになる。
【0075】
本発明の各部構成は上記実施の形態に限らず、特許請求の範囲に記載の技術的範囲内で種々の変形が可能である。
例えば、転動体として、ベース部2の前後に車輪5を設けているが、これに限らず、ベース部2が後傾し、踵着地時に体重を十分支持可能な位置にあり、かつ、足先を前傾し、足裏からの力を十分に路面へ伝達させることのできる位置へ配置することができれば、車輪5の数や位置に制限はない。また、車輪5は、無端履帯に替えることが可能である。
【産業上の利用可能性】
【0076】
本発明によれば、人の歩行状態を判別して、歩行補助装置の加減速を制御することができ、特に、体力の衰えた人が長距離を歩くときに、難しい取り扱いをすることなく、容易に歩行の補助を行なうことができる。また、自然歩行における加速期、定速期、減速期を判定し、周期歩行中の加速状態、減速状態で車輪の加速、減速を最適な加速度で補助するという、歩行動作に関係なく移動することのない補助方式が採用されているので、利用中の事故が起こり難い。
【符号の説明】
【0077】
1 履体
2 ベース部
3 シート
4 圧力センサー
5 車輪
6 車軸
7 補助輪
8 車軸
9 路面
10 締結ベルト
11 接触センサー
12 加速度センサー・ジャイロセンサー
13 加速度センサー・ジャイロセンサー
14 重力加速度
15 接地脚からみたx方向の腰の相対化速度
16 補助装置の加速度
17 重力加速度とz方向の腰の相対化速度の和
18 Imaginary Zero Moment Point
【技術分野】
【0001】
本発明は、二足歩行時に両足に履かせるべき左右一対の履体を具え、歩行者の歩行中の負担を軽減することが出来る歩行補助装置に関するものである。
【背景技術】
【0002】
従来、二足歩行を補助する装置としては、人の下肢に装着する外骨格型の装置本体を具えて人の足の動きを直接に補助する装置が一般的である(例えば特許文献1参照)。
【0003】
また、人が乗ることの可能な乗り物型の装置本体を具えて、人を運搬する同軸二輪車型の装置が多数提案されている(例えば特許文献2、3、4、5参照)。
【0004】
さらに、乗り物型の装置本体をローラースケートほどの大きさに縮小し、該装置本体に装着される足の動きに応じて、装置本体の制動を行なう歩行補助具が提案されている(特許文献6、7参照)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2010−075548号公報
【特許文献2】米国特許第005971091号公報
【特許文献3】特開2004−345030号公報
【特許文献4】特開2005−1554号公報
【特許文献5】特開2005−94898号公報
【特許文献6】特開2004−275525号公報
【特許文献7】特願2011−184823
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、従来の歩行補助装置は、人の脚の動きを直接に補助するシステムでは、システムが大型で、高コストな装置になる問題があった。また、特許文献6、7に記載された発明では、人の脚の動きから歩行を補助するタイミングを決定する機能しか備えておらず、人の様々な歩行状態に対応した適切な加速や減速の歩行補助を行なう加速度の判定手法が用意されていない問題があり、人の歩行動作を考慮した補助が不十分である問題があった。
【0007】
本発明は上記問題点に鑑みてなされたものであって、二足歩行機能の補助に使用して歩行能力の向上を図ることができる履物型の歩行補助装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明に係る歩行補助装置は、右足用の履体と左足用の履体とを具え、各履体は、足裏を載置すべきベース部と、該ベース部の裏面側に配備されてベース部を路面に沿って走行させるための1或いは複数の転動体からなる走行機構と、該走行機構を駆動する駆動機構と、該ベース部に配備されて二足歩行中のベース部の速度を計測する第1計測手段と、該ベース部の表面に配備されて足裏から受ける圧力を複数点にて計測する第2計測手段とを具え、各履体に配備された走行機構の走行速度を制御手段によって制御することにより、二足歩行を補助するものであって、前記制御手段は、二足歩行中に路面から離れている足について前記第1計測手段から得られる速度情報と、路面に着地している足について前記第2計測手段から得られる圧力情報とに基づいて、周期的な歩行状態が、路面に着地した足が路面から離れるまでの期間において走行速度を加速すべき加速期であるか、走行速度を定速に維持すべき定速期であるか、走行速度を減速すべき減速期であるかを判定し、その判定結果に応じて前記駆動機構に対する制御信号を生成する。
【0009】
人は二足歩行において、一歩ごとに加速と減速を繰り返して歩行しており、両足が着地した期間は加速と減速の双方が可能であり、片足支持状態に移行する直前の速度調整が行われる。又、片足のみが着地した期間の前半は、体全体の重心位置が支持脚の直上を通過するまで、歩行速度が減速される期間である。なお、体全体の重心位置が支持脚の直上に位置したとき瞬間的に進行方向へは加速も減速も行なうことが出来ず、体重を支えるために足裏全体に体重が均等にかかった状態である。その後、片足のみが着地した期間の後半は、体重が足裏全体に均等にかかった状態から足を後方へ蹴って前方への推進力を発生させるので、歩行速度は加速される。人の自然な歩行状態を妨げることなく歩行の補助を行なうには、足を後方へ蹴る加速状態では加速の補助を行ない、直後に減速状態になる両足支持期間や体幹より片足が前方にある片足支持による減速状態では減速の補助を行なうことが良い。
二足歩行中に、歩行者が片足を前方に着地させた状態からその足で路面を後方へ蹴って、その足を路面から離間させるまでの過程で、周期的な歩行が加速する加速期であるか、周期的な歩行が一定の平均速度を保つ定速期であるか、或いは周期的な歩行が減速する減速期であるかが、路面から離れている足(遊脚)の速度と、路面に着地している足から受ける圧力とに基づいて、正確に判定される。
【0010】
本発明に係る歩行補助装置によれば、二足歩行中の周期的な歩行における加速期、定速期、減速期の判別に応じて、駆動体により加速や減速の補助を適切に行うために、人の体幹の動きを正確に計測するために腰部の位置と加速度を計測する第3計測手段を具え、加速期と判定された場合には、駆動機構に対して周期歩行中に片足支持で後方へ足を蹴る加速状態にあるとき、腰の位置と脚の位置関係、および、足裏の圧力情報から車輪へ指示可能な最大加速度が決定され、駆動機構に対して加速の制御信号が供給され、定速期と判定された場合には、駆動機構に対して定速維持の制御信号が供給され、減速期と判定された場合には、駆動機構に対して周期歩行中の両足支持状態や片足支持で前方へ足を蹴る減速状態にあるとき、腰の位置と脚の位置関係、および、足裏の圧力情報から車輪へ指示可能な最大加速度が決定され、駆動機構へ減速の加速度の制御信号が供給される。これによって、駆動機構が供給された加速度に従って、加速、定速維持、若しくは減速のための駆動を行なって、走行機構を動作させる。
【0011】
具体的態様において、前記制御手段は、前記第1計測手段から得られる速度情報に基づいて二足歩行中に路面から離れている足の移動速度が基準値よりも増大しているか減少しているかを判別する第1の判別と、前記第2計測手段から得られる圧力情報に基づいて二足歩行中に路面に着地している足から受ける圧力の中心の移動速度が基準値よりも大きいか小さいかを判別する第2の判別と、前記第2計測手段から得られる圧力情報に基づいて二足歩行時に路面に着地している足から受ける圧力が踵側にて基準値よりも増大しているか爪先側にて基準値よりも増大しているかを判別する第3の判別とを実施し、これら3つの判別結果を統合することによって、二足歩行中の加速期、定速期及び減速期を判定する。
【0012】
尚、前記第1、第2及び第3の判別における各基準値としては、二足歩行中の各足の周期的な動きの1周期前の計測情報を採用し、有意な差があるか否かが判断される。
【0013】
又、具体的な態様において、前記制御手段は、前記3つの判別結果の統合を、K平均法を用いた非階層クラスタリングによって行なう。
又、前記制御手段は、前記非階層クラスタリングによって逐次学習を行なうことにより、二足歩行中の加速期、定速期及び減速期を判定する。
【0014】
更に具体的な態様において、前記制御手段は、前記第1の判別結果に関する限り、二足歩行中に路面から離れている足の移動速度が増大しているときは加速期、該移動速度が略一定のときは定速期、該移動速度が減少しているときは減速期であると判定する。
【0015】
又、前記制御手段は、前記第2の判別結果に関する限り、二足歩行中に路面に着地している足から受ける圧力の中心の移動速度が基準値よりも大きいときは加速期、該移動速度が基準値よりも小さいときは減速期であると判定する。
【0016】
又、前記制御手段は、前記第3の判別結果に関する限り、二足歩行中に路面に着地している足から受ける圧力が爪先側にて基準値よりも増大しているときは加速期、該圧力が踵側にて基準値よりも増大しているときは減速期であると判定する。
【0017】
前記判別方法にて決定された、加速期、減速期において、前記第3計測手段により取得された腰の位置を重心位置と仮定することで、重心位置に加わる加速度の釣り合いから計算される理想的な圧力中心位置であるIZMP (Imaginary Zero Moment Point)が得られる。歩行補助装置により重心へ進行方向に与えることのできる加速度の条件は、足裏が接地している領域内にIZMPを維持することの出来る加速度を求めることで得られる。また、最も効率よく歩行補助装置の加速補助を行なうためには、加速期の判定がされた場合、IZMPが後ろ足の接地する面の最後端に位置するための加速度が最大の加速度となり、減速期の判定がされた場合、IZMPが前足の接地する面の最前端に位置するための加速度が最大効率の減速を可能とする。
【0018】
又、前記制御手段は、前記第3計測手段を用いることができない場合、前記第2計測手段から得られる圧力情報に基づいて二足歩行中に路面に着地している足から受ける圧力の中心の結果をIZMPの代わりに利用して、加速期、および、減速期における最大効率の加速度を決定することが出来る。このとき、最も効率よく歩行補助装置の加速補助を行なうためには、加速期の判定がされた場合、足裏の圧力中心が後ろ足の接地する面の最後端に位置するための加速度が最大の加速度となり、減速期の判定がされた場合、前足の接地する面の最前端に圧力中心が位置するための加速度が最大効率の減速を可能とする。
【発明の効果】
【0019】
本発明に係る歩行補助装置によれば、二足歩行中の歩行者が何れか一方の足を路面に着地させた後、その足で路面を蹴って、前方へ一歩踏み出す過程で、歩行の補助なしに自然歩行する場合に周期的な歩行が減速期であるときは、周期歩行中の両足支持状態や片足支持状態において体幹が接地脚より後方にある場合、体幹の位置、および、足裏に加わる圧力分布の情報に応じて走行機構を適切な加速度で減速し、周期的な歩行が定速期であるときは、走行機構は定速を維持し、周期的な歩行が加速期であるときは、周期歩行中の片足支持状態において体幹が接地脚より前方にある場合、減速時と同じく体幹の位置、および、足裏に加わる圧力分布の情報に応じて走行機構を適切な加速度で加速し、この減速、定速維持及び加速が自然歩行する場合の周期的な加速と減速,および、定速の判定により左右の足で交互に実行され、かつ、判定された加速度の結果に対応して周期歩行中の加速状態、減速状態において走行機構の適切な加速と減速を行うため、歩行者は自然歩行時と変わらぬ歩行を行いながら自然歩行時よりも効率の良い加速と早い速度で歩行することが出来、歩行能力の向上を図ることが出来る。
【図面の簡単な説明】
【0020】
【図1】図1は、本発明の一実施形態である歩行補助装置の側面図である。
【図2】図2は、該歩行補助装置における複数の圧力センサーの配置を示す図である。
【図3】図3は、該歩行補助装置における制御の手続きを示すフローチャートである。
【図4】図4は、モータの速度制御を説明するブロック図である。
【図5】図5は、遊脚側の足の速度の時間変化を示すグラフである。
【図6】図6は、足裏から受ける圧力分布の中心位置の時間変化を示すグラフである。
【図7】図7は、爪先側に配置された圧力センサーによって計測される圧力の時間変化を示すグラフである。
【図8】図8は、踵側に配置された圧力センサーによって計測される圧力の時間変化を示すグラフである。
【図9】図9は、歩行サイクルにおける片方の履体の状態遷移を示す図である。
【図10】図10は、歩行補助装置を用いた二足歩行の様子を示す図である。
【図11】図11は、二足歩行の様子を説明する図である。
【図12】図12は、重心の加速度とIZMPの関係を説明する図である。
【図13】図13は、足裏の圧力中心とIZMPの時間変化を示す図である。
【発明を実施するための形態】
【0021】
次に、本発明の実施の形態につき、図面に沿って具体的に説明する。
本発明の一実施形態である歩行補助装置は、図1に示す如く、両足のそれぞれに履かせるべき履体1を具え、履体1は、足裏を載置すべきベース部2を具えている。ベース部2の裏面側には、前後2本の車軸6の両端に取り付けられた前後左右4つの車輪5が配備されると共に、前方端には、車軸8によって回転可能に支持された補助輪7が配備されている。
【0022】
又、ベース部2の裏面には、加速度センサー・ジャイロセンサー12と、補助輪7が路面9に着地した状態を検知するための接触センサー11が配備されている。
【0023】
ベース部2の表面には、複数の圧力センサー4が分散して配備され、これらの圧力センサー4はシート3によって覆われている。又、ベース部2の表面には、シート3上に足を拘束するための締結ベルト10が取り付けられている。
【0024】
前記複数の圧力センサー4は、図2に示す様に、ベース部2上の足の親指に対応する第1領域13と、親指関節の付け根に対応する第2領域14と、薬指関節の付け根に対応する第3領域15と、踵に対応する第4領域16とに、それぞれ1つずつ配置されている。
【0025】
図1に示す2本の車軸6はそれぞれサーボモータ(図示省略)に繋がっており、該モータは、制御回路(図示省略)からの速度制御信号によって前進方向に回転駆動される。そして、モータの回転速度は、ロータリエンコーダ(図示省略)によって検出される。
【0026】
前記圧力センサー4、加速度センサー・ジャイロセンサー12、接触センサー11、及びロータリエンコーダからの信号は、前記制御回路に供給され、これに応じて制御回路は速度制御信号を生成する。
【0027】
図3は、前記制御回路による制御手続きを表わしている。
歩行が開始されると、先ずステップS1では、センサー情報を取得し、ステップS2では、センサー情報と情報記憶部との比較を行なう。ここで、情報記憶部には、歩行補助なしの自然歩行におけるセンサー情報や、歩行補助を行なった場合の過去のセンサー情報が格納されている。
【0028】
次にステップS3では、取得されたセンサー情報によって情報記憶部の更新を行ない、ステップS4では、後述する加減速の判定を行なう。ここで、減速が判定されたときは、ステップS5にて減速の指令を発する。又、定速が判定されたときは、ステップS6にて定速維持の指令を発する。又、加速が判定されたときは、ステップS7にて加速の指令を発する。
【0029】
続いて、ステップS8にて後述するIZMP、および、足裏の圧力中心位置を使った加速度の決定を行なって、モータに対する角速度指令を生成した後、ステップS9では、角速度指令に応じてモータの回転速度を制御する。その後、ステップS10にて、歩行が終了したか否かを判断し、ノーの場合はステップS1に戻って同じ手続きを繰り返す。ステップS10にてイエスと判断されたときは歩行制御を終了する。
【0030】
図4は、前記ステップS9におけるモータの速度制御を表わしている。
先ずステップS11では、角速度指令の積分を行なって目標位置を計算する。次にステップS12では、PID制御によって速度指令を生成する。更にステップS13では、速度指令をサーボモータへ供給する。そして、ステップS14では、サーボモータの回転がロータリエンコーダに伝えられ、モータの回転角度が計測される。
【0031】
尚、PID制御において、位置誤差としては、角速度指令の積分による目標位置と、エンコーダによって計測される回転角度から計算される現在位置との差を計算する。又、速度誤差としては、角速度指令と、エンコーダによって計測される回転角度の差分から計測される角速度との差を計算する。
【0032】
以下、図3のステップS4で実行すべき加減速の判定について説明する。
先ず図11に基づいて、二足歩行における周期歩行中の減速と加速について説明する。二足歩行においては、両足によって体重を支持する両足支持期と、片足によって体重を支持する片足支持期とが交互に繰り返される。
【0033】
人は二足歩行において、一歩ごとに加速と減速を繰り返して歩行しており、両足支持期は次の片足支持状態へ移行するための速度を調整する期間であるが、加速と減速の2状態へ簡略化することを考えた場合、減速状態であると判定することが出来る。又、片足支持期の前半は、体幹が支持脚の後方にあり体重が踵にかかった状態から体幹が支持脚の直上に位置し体重が足裏全体に均等にかかるまでは、減速状態であると判定することが出来る。その後、片足支持期の後半は、体幹が支持脚の前方へ位置し体重が足裏全体に均等にかかった状態から足を後方へ蹴って前方への推進力を発生させるので、加速状態であると判定することが出来る。
【0034】
図9に示す如く、歩行補助装置を装着した状態での二足歩行においては、前後の車輪が路面から離れた状態1から、踵側の車輪が着地した状態2と、前後の車輪が着地して足裏全体に均等に体重がかかった状態3と、踵側の車輪が路面から離間して爪先側の車輪が着地した状態4と、更に前方へ傾斜して爪先側の車輪と前方の補助輪とが着地した状態5とを経て、爪先側の車輪が路面から離間した状態6に至る。
【0035】
なお、図9に記載の歩行補助装置の動きは、一例を示したもので、着地の姿勢が状態2以外でも可能であり、それらの状況は圧力センサー4と加速度センサー・ジャイロセンサー12からの情報で判断することが可能である。同じく、前後の車輪が路面から離間するタイミングも図9の6番目の状態に限らず、圧力センサー4と加速度センサー・ジャイロセンサー12からの情報で判断することが可能である。
【0036】
人の自然な歩行状態を妨げることなく加速と減速の補助を行なうには、通常歩行の加速と減速が行われる状態で補助装置の加速と減速を行なうことが良い。
そこで、本発明の走行補助装置においては、複数の圧力センサー4と加速度センサー・ジャイロセンサー12とから得られる信号に基づいて、周期的な歩行の減速期、加速期、定速期の判定を行ない、その判定結果に基づいて、周期歩行中の加速状態や減速状態に前記モータに対する加速や減速および定速維持の制御信号を生成する。
【0037】
具体的には、加速度センサー・ジャイロセンサー12から得られる計測データに基づいて、二足歩行中に路面から離れている遊脚側の足の移動速度が基準値よりも増大しているか減少しているかを判別する第1の判別と、複数の圧力センサー4から得られる計測データに基づいて、二足歩行中に路面に着地している足から受ける圧力の中心位置の移動速度が基準値よりも大きいか小さいかを判別する第2の判別と、複数の圧力センサー4から得られる計測データに基づいて、二足歩行時に路面に着地している足から受ける圧力が踵側にて基準値よりも増大しているか爪先側にて基準値よりも増大しているかを判別する第3の判別とを実施する。
【0038】
圧力センサー4を用いた人の歩行の加減速の判別において、足裏の圧力中心は、各圧力センサー4の計測値から計算されるものであり、各圧力センサー4の計測情報を比較すると、歩き出しや加速期には、爪先で計測される圧力が他の足裏着地部より大きな値を示し、かつ、定速歩行しているときの圧力分布と比較すると、爪先で計測される圧力が大きく、圧力が加わる持続時間が長く計測されるため、加速の判別をする。
減速期には、踵部の計測圧力が他の着地部よりも大きくなり、かつ、定速歩行しているときより踵の圧力が大きく持続時間が長く計測されるため、減速の判別をする。
【0039】
また、圧力中心の変化は、定速歩行時と比べて、爪先へ圧力中心が移行する時間が早く、かつ、爪先に位置する時間の割合が長くなるとき、加速期と判別をする。踵付近に圧力中心が維持される時間が定速歩行しているときよりも長くなり、かつ、爪先へ圧力中心が移行する時間が定速歩行しているときよりも遅くなるとき、減速期と判別をする。
【0040】
加速度センサー・ジャイロセンサー12を用いた人の歩行の加減速の判別においては、図9に記載される状態1から状態2を経て状態3に支持脚の状態が変化するときの反対側の足が空中を移動する遊脚期において、遊脚側の履体1に搭載される加速度センサー・ジャイロセンサー12から計測される加速度と角速度情報から、図9に記載の4番目の加速の補助を行なう状態に入る直前までの遊脚の平均移動速度と平均角速度を算出し、1歩前の平均速度と平均角速度と比較し、速くなっているとき、加速期と判別し、遊脚の平均移動速度と平均角速度が、1歩前の平均速度と平均角速度と比較し、遅くなっているとき、減速期と判別する。
【0041】
図5は、加速度センサー・ジャイロセンサー12によって計測される遊脚側の足の移動速度(スイング速度)の時間変化を表わしている。ここで、速度のピークが増大している期間は加速期、速度のピークが略一定の期間は定速期、速度のピークが減少しているときは減速期であると判別することが出来る。
より具体的にはスイング速度のピーク値を1歩行サイクル前のスイング速度のピーク値と比較して、スイング速度のピーク値が1歩行サイクル前のスイング速度のピーク値よりも有意に高いときは加速期、スイング速度のピーク値が1歩行サイクル前のスイング速度のピーク値よりも有意に低いときは減速期と判別することが出来る。
【0042】
図6は、右足と左足について、複数の圧力センサー4によって計測される足裏圧力の中心位置(ZMP:Zero Moment Point)の変化を表わしている。縦軸の原点(0mm)は、踵側の圧力センサー4dの位置に対応し、爪先側の圧力センサー4aの位置(0.185mm)に向かって、圧力分布が遷移している。
図6において、縦の破線で囲まれた区間は図9記載の状態3を示しており、歩行中の片足支持期における減速から加速に転じる期間であるため、この期間におけるZMPの変化に基づいて、加速期、減速期、定速期を判別することが出来る。
【0043】
図6から明らかなように、歩き出しの加速期には他の期間に比べて支持脚の着地時間に対して爪先へZMPが移行する時間が早く、歩き終わりの減速期には踵付近にZMPが維持される時間が長くなり、爪先へZMPが移行する時間が遅くなる。減速期には爪先を着地せずに減速していることがあるため、その場合はZMPが爪先まで移行しない。この結果から、爪先へZMPが移行する時間が早ければ加速期間であり、遅ければ減速期間であると判別することが出来る。
【0044】
より具体的には、ZMPの変化は,現在の歩行サイクルにおけるZMPの移動速度が爪先立ちの姿勢になるまでの最大値(若しくは爪先までの移動時間)と1歩行サイクル前のZMPの移動速度の最大値(若しくは爪先までの移動時間)を比較して、増える方向へ有意な差(ある閾値以上)があった場合は、加速期間と判別する。同様に、減速期間である両足支持期間の直前までの現在の歩行と1サイクル前の歩行のZMPの変化を比較して、減る方向へ有意な差があった場合は減速期間と判別する。
【0045】
図7は、爪先側に配置された圧力センサー4aによって検出される圧力の時間変化を示すグラフであり、図8は、踵側に配置された圧力センサー4dによって検出される圧力の時間変化を示すグラフである。
加速期には、爪先側に配置された圧力センサー4aによって検出される圧力が他の状態の歩行時の圧力よりも大きいことが確認でき、減速時には、踵側に配置された圧力センサー4dによって検出される圧力が他の状態の歩行時の圧力よりも大きいことが確認できるので、爪先側の圧力が大きければ、加速期であると判別することが出来、踵側の圧力が大きければ、減速期であると判別することが出来る。
【0046】
より具体的には、1歩行サイクル前の最大の圧力と比較して、踵側の圧力が大きく計測された場合は減速期と判別し、爪先側の圧力が大きく計測された場合は加速期と判別する。
【0047】
但し、踵側の圧力が大きく計測されるときには、既に自然歩行における周期歩行中の減速状態である両足支持期間であるので、1サイクル前の両足支持期間での最大値との比較となり、1サイクル前の両足支持期間の最大の踵側圧力よりも閾値を超えて大きくなったときは緊急の減速の意思があると判定し,両足支持期と直後の片足支持期前半の減速状態において車輪の減速の指示を与える。又、加速の時も爪先側に大きな圧力がかかるときは既に爪先立ちをしている自然歩行における周期歩行中の加速状態である場合が多いため、1サイクル前の最大の爪先側圧力と比較して、現在の爪先側圧力が閾値を超えて大きくなっていたと判断された場合、現在の爪先立ちをしている加速状態の途中から車輪の加速の指示を与える。
【0048】
そして、遊脚側の足のスイング速度による第1の判別(図5)と、ZMPの移動速度による第2の判別(図6)と、踵側と爪先側の圧力による第3の判別(図7、図8)とを統合することによって、二足歩行中の加速期、定速期及び減速期を判定する。
【0049】
3つの判別結果の統合には、K平均法を用いた非階層クラスタリングによる逐次学習(堂本直揮、小澤隆太:「逐次学習型歩行相判別アルゴリズムの開発:」,11回システムインテグレーション部門講演会(SI2010)講演論文集,pp.217−220,(2010)参照)を用いて、二足歩行中の加速期、定速期及び減速期の判定を行なう。
ここで、逐次学習された結果は、図3のステップS3における「情報記憶部の更新」にて反映される。
【0050】
xhを踵側にかかる圧力、xtを爪先側に掛かる圧力、xdを脚のスイング速度の差、xiを足裏圧力から計算されるZMPとする。また、それぞれのクラスタ平均をuh、ut、ud、uiとしたとき、n回目に計測された値の4次元ベクトルをxn=[xh xt xd xi]n、クラスタ平均をu(j)=[uh ut ud ui]とする。但し、jは加速、定速、減速の3つのクラスタに分けられるとし、ここではj=1,2,3と与えることとする。このときK平均法の考え方からクラスタリングされた結果phinとクラスタ平均の更新を次式のように行なう。
【0051】
phin=argmin(||xn−u(j)||) (j=1,2,3)
un(j)=un(j)+f(phin)(xn−un(j))
if j=phin
f(phin)=0.01
else
f(phin)=0
【0052】
圧力センサー4及び加速度センサー・ジャイロセンサー12の計測情報から判断される加減速の指令(aw)は、例えば、圧力変化の評価式(Vp)、足裏圧力から計算される圧力中心の評価式(Vz)、遊脚の平均速度の評価式(Vm)からなる下記の式で統一して判断することができる。
【0053】
aw=Kp*Vp+Kz*Vz+Km*Vm
但し、Kp、Kz、Kmは合成するための重み係数である。また、車輪5の速度Vwはゼロ以上とし、車輪5による加減速awは人が転倒しないと判断される上限を超えないように下記の方法に従い設定される。
【0054】
図12は第3計測手段である腰の位置に配置したセンサーの場所を重心位置(xcog, zcog)と仮定し、重心に加わる進行方向加速度と垂直方向加速度、及び、重力加速度から算出されるIZMPの位置関係を示している。重心に加わる重力加速度をg、と支持脚の蹴り力による進行方向の加速度をax、垂直方向の加速度をaz、駆動体による加速度をawとしたとき、ベクトルの合成をした方向と床面との交点がIZMPの位置となる。IZMPを足裏の接地領域内で決定することで、床面からの蹴り力を効率的に重心位置に伝えることが可能になるため、車輪による最大の加速度awmaxを得るためのIZMPの位置xlimは接地領域内の最後部となる。減速を行う場合、最大効率の減速を得るためのIZMPの位置xlimは接地領域内の最前部となる。前述の加速期、減速期の脚位置の関係から最大加速の上限として与えられる具体的なxlimの位置は、図9中の状態5における前輪の位置となり、最大減速を得るための具体的なxlimの位置は、図9中の状態3における前輪の位置に設定することが出来る。より具体的に、車輪の加速度awmaxは下記の式で統一して表すことが出来る。
【0055】
awmax = (xcog - xlim)(az + g) / zcog - ax
実際に上式を利用する場合、第2の計測手段により足の位置を計測して、その足の位置からIZMPの移動可能範囲であるxlimを決定する。そして、腰に取り付けられた第3の計測手段により腰の位置(xcog, zcog)と加速度(ax, az)を取得することで現在の歩行状態における最大加速度が決定される。
【0056】
前記加速度決定の際に利用していた腰部の第3計測手段が利用できない場合、第2の計測手段から得られる足裏の圧力中心(ZMP)に従って、簡易的に加速度の上限を定めることが出来る。i番目の圧力センサーの位置をxp(i)、i番目のセンサーで計測された値をf(i)としたとき、圧力中心の位置xzmpは次のように計算される。
【0057】
xzmp=Σxp(i)f(i)/Σf(i)
【0058】
図13は、上式で計算された圧力中心の位置とIZMPの位置の変化を示した図である。圧力センサーで計測された圧力中心は足裏の範囲を超えることはなく、IZMPよりも小さな値であるので、最大の加速度はIZMPを利用した時も小さく計算されてしまう。しかし、理想的な最大値であるIZMPを超えることはないため、安全に加速を行える最大値として利用することが出来る。
【0059】
圧力中心を使った加速度の限界は、駆動体による加速がない場合の釣り合い式と駆動体により重心へ加速が加わった場合の釣り合い式の2つを利用することで簡易な式で表すことが出来る。まず、駆動体による加速がないときの釣り合いは圧力中心x0についての釣り合い式から次の式で表される。
【0060】
zcog・ax=(g+az)(xcog−x0)
【0061】
駆動体により重心へ加速が加わり、圧力中心がxzmp変化した時の釣り合いは次の式で表される。
【0062】
zcog(ax−aw)=(g+az)(xcog−x0−xzmp)
【0063】
上記2つの式を用いて車輪の加速度の上限awmaxは次の式で求められる。
【0064】
awmax=(g+az)・xzmp/zcog
垂直方向の加速度azはほとんど変化しないと仮定することで、圧力センサー
で計測されるZMPの値から最大加速度を決定することが出来る。
【0065】
本発明に係る歩行補助装置によれば、履体1に配備された車輪5の回転制御により、歩行者が地面を蹴る力の補助と歩行速度の補助を行なうことが出来、例えば図10の如く、加速期には車輪が加速することによって蹴り力が増加すると共に、1歩の踏み出し距離が長くなる。
又、本発明に係る歩行補助装置によれば、大掛かりな装置に比べてコストが安くなり、かつ、様々な利用者の自然な歩行のままで移動能力を効率よく補助することが出来る。
【実施例】
【0066】
以下のようにして歩行補助装置を構成し、人の歩行を補助することが可能である。
カーボンプレートで作製したベース部2に速度指令可能なモータドライバとDCモータ(たとえば、マクソン製)を取り付け、図1の前後にある車輪5を駆動するためにベルトでDCモータと車輪5を繋ぎ、前後の車輪5が同じ速度で回転するように構成する。
【0067】
ベース部2上部に薄型圧力センサー(ニッタ株式会社Flexi Force)を図2に記載のように、踵部、前足部の左右、および、足趾部の親指が接触する箇所に設置し、圧力センサー4の上部にカーボンプレート製のシート3を取り付けることで、人の歩行時の圧力情報を読み取ることができる。
【0068】
また、ベース部2の下に3軸加速度センサーとジャイロセンサーを含んだモーションセンサー(株式会社ゼットエムピー IMU−Z)を取り付けることで、歩行補助装置の位置と傾きを計測でき、人が意図する加速や減速する状況や歩行補助装置が加速と減速を行なうことが可能な状況を判別することができる。
センサー情報に基づくモータの速度制御は、例えば身体に装着可能なマイクロコンピュータによって行なうことが出来る。
【0069】
さらに、人の腰部には重心位置計測用の3軸加速度センサーとジャイロセンサーを含んだモーションセンサー(株式会社ゼットエムピー IMU−Z)を取り付けることで重心の位置と加速度を計測でき、歩行補助装置の位置計測結果と合わせて、歩行状態に合わせた最適な加速度を算出するために利用することが出来る。
【0070】
車輪5による加速と減速の補助は、図10に記載の1番目のように両足で支持された状態のとき腰は前足よりも必ず後方に存在するため減速可能な最適な加速度を重心位置と重心位置の加速度、および、前足の位置から算出を行ない、人の歩行意図が減速と判定されたときに効率良い加速度を即時に与えられるように備える。また、片足支持状態で図9に記載の2番目と3番目の状態では人の腰は支持脚より後方に位置する期間のため前記同様に最適な減速を行なうための加速度の計算を行い、片足指示状態で図9記載の4番目と5番目の状態では人の腰は支持脚より前方に位置する期間があるため最適な加速を行なうための加速度計算を重心位置と重心位置の加速度、および、後ろ足の位置から算出を行ない、人の歩行意図が減速と判定されたときに効率良い加速度を即時に与えられるように備える。これによって、歩行補助装置による加速と減速が人の歩行状態に同期した最適な補助がされることになる。
【0071】
尚、歩行補助装置搭載の圧力センサー4、加速度センサー・ジャイロセンサー12及び腰部搭載の加速度センサー・ジャイロセンサーは、ADボードに直接つないで計測するので、1000Hz以上の計測周期でデータを取得することが可能であるが、100Hz程度のサンプリング周期であっても20点での計測が可能であり,判断の遅れも0.01秒程度で、動作に支障をきたすことはない。
【0072】
各センサーの値は常に計測し続けており,各判定では計測データを前回の歩行サイクルの計測データと比較する。ここで、ZMPの移動速度については、1歩行サイクル前のZMPの移動速度の最大値(もしくは,ZMPが踵から爪先に到達するまで時間)を保存しておき,現在の歩行サイクルと比較する。踵側と爪先側の圧力については、1歩行サイクル前の踵と爪先の圧力センサーの値の最大値を保存しておき,現在の歩行サイクルで各圧力センサーの値と比較する。又、遊脚スイング速度については、1サイクル前の足のスイング速度の最大値を保存しておき,現在の歩行サイクルにおける脚のスイング速度を比較する。
【0073】
尚、歩き始めの制御においては、1サイクル前の歩行としてのデータがないので、1歩踏み出すまでは計測のみを行なってデータを蓄積し,次(2サイクル目)の足を踏み出すときに1サイクル目のZMPの最大移動速度、踵側及び爪先側の圧力の最大値、及び遊脚のスイング速度の最大値を比較しながら2サイクル目の加速期である爪先立ちの状態5に車輪の加速を行なうべきかを判断する。
【0074】
又、歩き終わりの制御においては、通常の減速の判断の他に,足の位置が左右で同じ位置になったときに減速判別をする方法が採用可能である。両足を揃えているときは止まる意思があると判定することが可能である。歩行を継続し徐々に減速するときは,通常の減速タイミングの制御のみでの減速をしていくことになる。
【0075】
本発明の各部構成は上記実施の形態に限らず、特許請求の範囲に記載の技術的範囲内で種々の変形が可能である。
例えば、転動体として、ベース部2の前後に車輪5を設けているが、これに限らず、ベース部2が後傾し、踵着地時に体重を十分支持可能な位置にあり、かつ、足先を前傾し、足裏からの力を十分に路面へ伝達させることのできる位置へ配置することができれば、車輪5の数や位置に制限はない。また、車輪5は、無端履帯に替えることが可能である。
【産業上の利用可能性】
【0076】
本発明によれば、人の歩行状態を判別して、歩行補助装置の加減速を制御することができ、特に、体力の衰えた人が長距離を歩くときに、難しい取り扱いをすることなく、容易に歩行の補助を行なうことができる。また、自然歩行における加速期、定速期、減速期を判定し、周期歩行中の加速状態、減速状態で車輪の加速、減速を最適な加速度で補助するという、歩行動作に関係なく移動することのない補助方式が採用されているので、利用中の事故が起こり難い。
【符号の説明】
【0077】
1 履体
2 ベース部
3 シート
4 圧力センサー
5 車輪
6 車軸
7 補助輪
8 車軸
9 路面
10 締結ベルト
11 接触センサー
12 加速度センサー・ジャイロセンサー
13 加速度センサー・ジャイロセンサー
14 重力加速度
15 接地脚からみたx方向の腰の相対化速度
16 補助装置の加速度
17 重力加速度とz方向の腰の相対化速度の和
18 Imaginary Zero Moment Point
【特許請求の範囲】
【請求項1】
右足用の履体と左足用の履体とを具え、各履体は、足裏を載置すべきベース部と、該ベース部の裏面側に配備されてベース部を路面に沿って走行させるための1或いは複数の転動体からなる走行機構と、該走行機構を駆動する駆動機構と、該ベース部に配備されて二足歩行中のベース部の速度を計測する第1計測手段と、該ベース部の表面に沿って配備されて足裏から受ける圧力を複数点にて計測する第2計測手段とを具え、人の腰部には、二足歩行中の人の腰の位置と加速度を計測する第3計測手段を具え、各履体に配備された走行機構の走行速度を制御手段によって制御することにより、二足歩行を補助する歩行補助装置であって、
前記制御手段は、二足歩行中に前記第1計測手段から得られる速度情報と、路面に着地している足について前記第2計測手段から得られる圧力情報と、前記第3計測手段から得られる腰の位置と加速度情報に基づいて、路面に着地した足の位置と人の歩行状態が走行速度を加速可能である加速期であるか、走行速度を減速可能である減速期であるかを判定し、その判定結果に応じて、前記駆動機構に対する最適な加速度を生成する歩行補助装置。
【請求項2】
前記制御手段は、前記第1計測手段、前記第2計測手段、及び、前記第3計測手段から得られる速度と圧力情報に基づいて、人の二足歩行中のIZMP (Imaginary Zero Moment Point)を算出し、前記IZMPが前記駆動体による加速度の調整により路面に接している脚の接地領域から逸脱することのない端点に設定することにより、前記駆動体が人の歩行状態を妨げることのない最大の加速度を提供することを可能とする請求項1に記載の歩行補助装置。
【請求項3】
右足用の履体と左足用の履体とを具え、各履体は、足裏を載置すべきベース部と、該ベース部の裏面側に配備されてベース部を路面に沿って走行させるための1或いは複数の転動体からなる走行機構と、該走行機構を駆動する駆動機構と、該ベース部に配備されて二足歩行中のベース部の速度を計測する第1計測手段と、該ベース部の表面に沿って配備されて足裏から受ける圧力を複数点にて計測する第2計測手段とを具え、各履体に配備された走行機構の走行速度を制御手段によって制御することにより、二足歩行を補助する歩行補助装置であって、
前記制御手段は、二足歩行中に前記第1計測手段から得られる速度情報と、路面に着地している足について前記第2計測手段から得られる圧力情報に基づいて、路面に着地した足の位置と人の歩行状態が走行速度を加速可能である加速期であるか、走行速度を減速可能である減速期であるかを判定し、その判定結果に応じて、前記駆動機構に対する最適な加速度を生成する歩行補助装置。
【請求項4】
前記制御手段は、前記第1計測手段、前記第2計測手段から得られる速度と圧力情報に基づいて、人の二足歩行中の足裏の圧力中心を算出し、前記圧力中心が前記駆動体による加速度の調整により路面に接している脚の接地領域から逸脱することのない端点に設定することにより前記駆動体が人の歩行状態を妨げることのない最大の加速度を提供することを可能とする請求項1、または、請求項3に記載の歩行補助装置。
【請求項5】
人の自然な二足歩行状態である周期的な歩行における加速期、定速期、減速期の判別に応じて、加速期と判定された場合には、駆動機構に対して周期歩行中に片足支持で後方へ足を蹴る加速状態にあるとき、前記制御手段により決定された最大加速度を満たす制御信号が供給され、定速期と判定された場合には、駆動機構に対して定速維持の制御信号が供給され、減速期と判定された場合には、駆動機構に対して周期歩行中の両足支持状態や片足指示で腰が指示脚よりも後方にある減速状態にあるとき、前記制御手段により決定された最大加速度を満たす減速の制御信号が供給される請求項1乃至請求項4の何れかに記載の歩行補助装置。
【請求項1】
右足用の履体と左足用の履体とを具え、各履体は、足裏を載置すべきベース部と、該ベース部の裏面側に配備されてベース部を路面に沿って走行させるための1或いは複数の転動体からなる走行機構と、該走行機構を駆動する駆動機構と、該ベース部に配備されて二足歩行中のベース部の速度を計測する第1計測手段と、該ベース部の表面に沿って配備されて足裏から受ける圧力を複数点にて計測する第2計測手段とを具え、人の腰部には、二足歩行中の人の腰の位置と加速度を計測する第3計測手段を具え、各履体に配備された走行機構の走行速度を制御手段によって制御することにより、二足歩行を補助する歩行補助装置であって、
前記制御手段は、二足歩行中に前記第1計測手段から得られる速度情報と、路面に着地している足について前記第2計測手段から得られる圧力情報と、前記第3計測手段から得られる腰の位置と加速度情報に基づいて、路面に着地した足の位置と人の歩行状態が走行速度を加速可能である加速期であるか、走行速度を減速可能である減速期であるかを判定し、その判定結果に応じて、前記駆動機構に対する最適な加速度を生成する歩行補助装置。
【請求項2】
前記制御手段は、前記第1計測手段、前記第2計測手段、及び、前記第3計測手段から得られる速度と圧力情報に基づいて、人の二足歩行中のIZMP (Imaginary Zero Moment Point)を算出し、前記IZMPが前記駆動体による加速度の調整により路面に接している脚の接地領域から逸脱することのない端点に設定することにより、前記駆動体が人の歩行状態を妨げることのない最大の加速度を提供することを可能とする請求項1に記載の歩行補助装置。
【請求項3】
右足用の履体と左足用の履体とを具え、各履体は、足裏を載置すべきベース部と、該ベース部の裏面側に配備されてベース部を路面に沿って走行させるための1或いは複数の転動体からなる走行機構と、該走行機構を駆動する駆動機構と、該ベース部に配備されて二足歩行中のベース部の速度を計測する第1計測手段と、該ベース部の表面に沿って配備されて足裏から受ける圧力を複数点にて計測する第2計測手段とを具え、各履体に配備された走行機構の走行速度を制御手段によって制御することにより、二足歩行を補助する歩行補助装置であって、
前記制御手段は、二足歩行中に前記第1計測手段から得られる速度情報と、路面に着地している足について前記第2計測手段から得られる圧力情報に基づいて、路面に着地した足の位置と人の歩行状態が走行速度を加速可能である加速期であるか、走行速度を減速可能である減速期であるかを判定し、その判定結果に応じて、前記駆動機構に対する最適な加速度を生成する歩行補助装置。
【請求項4】
前記制御手段は、前記第1計測手段、前記第2計測手段から得られる速度と圧力情報に基づいて、人の二足歩行中の足裏の圧力中心を算出し、前記圧力中心が前記駆動体による加速度の調整により路面に接している脚の接地領域から逸脱することのない端点に設定することにより前記駆動体が人の歩行状態を妨げることのない最大の加速度を提供することを可能とする請求項1、または、請求項3に記載の歩行補助装置。
【請求項5】
人の自然な二足歩行状態である周期的な歩行における加速期、定速期、減速期の判別に応じて、加速期と判定された場合には、駆動機構に対して周期歩行中に片足支持で後方へ足を蹴る加速状態にあるとき、前記制御手段により決定された最大加速度を満たす制御信号が供給され、定速期と判定された場合には、駆動機構に対して定速維持の制御信号が供給され、減速期と判定された場合には、駆動機構に対して周期歩行中の両足支持状態や片足指示で腰が指示脚よりも後方にある減速状態にあるとき、前記制御手段により決定された最大加速度を満たす減速の制御信号が供給される請求項1乃至請求項4の何れかに記載の歩行補助装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2013−111118(P2013−111118A)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2011−257900(P2011−257900)
【出願日】平成23年11月25日(2011.11.25)
【新規性喪失の例外の表示】特許法第30条第1項適用申請有り 平成23年5月26日に、日本機械学会ロボティクス・メカトロニクス部門主催の「ロボティクス・メカトロニクス講演会2011」にて頒布された講演予稿集 平成23年8月1日に公益財団法人カシオ科学振興財団によって発行された「研究助成成果報告論文集(平成23年度)」 平成23年9月1日に、日本機械学会ロボティクス・メカトロニクス部門主催の「第21回インテリジェント・システム・シンポジウム」にて頒布された講演原稿集
【出願人】(509037008)
【出願人】(509037019)
【出願人】(511209066)
【出願人】(511209077)
【Fターム(参考)】
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成23年11月25日(2011.11.25)
【新規性喪失の例外の表示】特許法第30条第1項適用申請有り 平成23年5月26日に、日本機械学会ロボティクス・メカトロニクス部門主催の「ロボティクス・メカトロニクス講演会2011」にて頒布された講演予稿集 平成23年8月1日に公益財団法人カシオ科学振興財団によって発行された「研究助成成果報告論文集(平成23年度)」 平成23年9月1日に、日本機械学会ロボティクス・メカトロニクス部門主催の「第21回インテリジェント・システム・シンポジウム」にて頒布された講演原稿集
【出願人】(509037008)
【出願人】(509037019)
【出願人】(511209066)
【出願人】(511209077)
【Fターム(参考)】
[ Back to top ]