
永久磁石式同期モータの回転子
【課題】従来のISM方式の永久磁石型モータの課題を克服し、簡便な構造で、より小型な高効率モータを実現できる回転子を低コストで提供する。
【解決手段】回転子10は、回転子鉄心11と、回転子鉄心11に埋設された複数の永久磁石13と、回転子鉄心11の外周面を覆う、導電性材料から形成された筒体15とを備える。回転子鉄心11には、永久磁石13の表面から回転子鉄心11の外周面に向かって延びる複数のスリット12が形成されている。
【解決手段】回転子10は、回転子鉄心11と、回転子鉄心11に埋設された複数の永久磁石13と、回転子鉄心11の外周面を覆う、導電性材料から形成された筒体15とを備える。回転子鉄心11には、永久磁石13の表面から回転子鉄心11の外周面に向かって延びる複数のスリット12が形成されている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、永久磁石式同期モータの回転子に関するものである。
【背景技術】
【0002】
近年、各国においてモータの高効率化を要求する規制が強化されようとしている。従来、ポンプやファン等を駆動するモータとしては、一般に、堅牢かつ安価な誘導電動機が使用されてきた。しかしながら、誘導電動機を高効率化しようとすると、性能のよい高価な電磁鋼板が必要となり、またモータ体格を従来よりも2倍近く大きくすることが必要となる。このため、誘導電動機の高効率化には、コストアップが避けられないと共にモータの大型化が避けられない。
【0003】
一方、誘導電動機よりも一般に高効率が実現できるモータとして、永久磁石式同期モータがある。しかしながら、この永久磁石式同期モータは、商用電源での自起動ができず、インバータ装置を併用しなくてはならない。このため、永久磁石式同期モータは、従来の誘導電動機に比べるとかなり高価なものとなっている。
【0004】
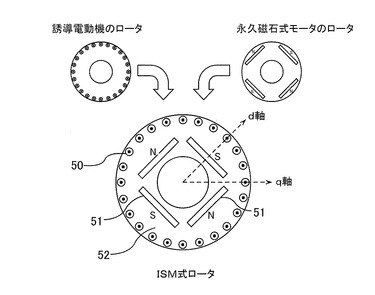
そこで、自起動が可能な永久磁石式モータとして、モータの回転子に誘導電動機のかご形導体と永久磁石を併設した所謂ISM方式(誘導同期方式)のモータが近年注目されている。このISM方式モータの回転子としては、様々な構造のものが提案されている。図4に、ISM方式モータの回転子の一例を示す。図4に示すように、ISM方式モータの回転子は、誘導電動機に使用されるかご形導体50と、永久磁石式モータに使用される永久磁石51とが回転子鉄心52に埋設された構造を有している。
【0005】
しかしながら、これまで提案されてきたISM方式モータの回転子のほとんどが、従来の誘導電動機のかご形導体の内側に永久磁石を配置した構造のものであることから、従来の誘導電動機に比べてもあまり小型化することができなかった。また、ISM方式モータの製造方法は、従来の誘導電動機の製造工程に加えて、永久磁石を配置する工程がさらに必要になるので、上記誘導電動機を高効率化する場合と同様のコストがかかり、これまでにあまり実用化が進んでいない。
【0006】
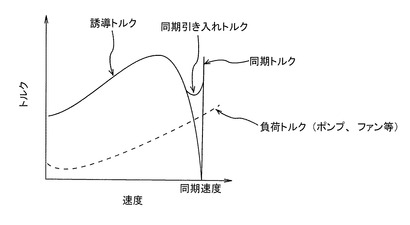
図5にISM方式モータの発生トルクのグラフを示す。図5に示すように、ISM方式のモータには、かご形導体による誘導トルクと永久磁石による同期トルクとが混在している。この2つのトルクは交差することは無く、起動時は誘導トルクのみにて回転子を加速し、運転時には永久磁石による同期トルクのみで回転子を回転させる。これら誘導トルクと同期トルクとを滑らかに繋げるためには、図5に示すように、これら2つのトルク以外の第3のトルク、即ち同期引き入れトルクが必要である。また、同期速度でモータを駆動するためには、同期引き入れトルクは負荷トルクよりも大きくなければならない。
【0007】
大きな同期引き入れトルクを発生させるためには、回転子鉄心と固定子の回転磁界との間に生じるリラクタンストルクを大きくすればよいことが知られている。即ち回転子の内部に埋設された永久磁石の磁極中心を通るd軸と磁極間を通るq軸(図4参照)との間のインダクタンスの変化を大きくすることで前記リラクタンストルクを大きくすることができる。しかしながら、図4に示す従来のISM方式の回転子では、固定子に対向する回転子の外周面の近傍にかご形導体が配置されているので、前記リラクタンストルクが小さくなってしまう。その結果、回転子を確実に同期速度に引き入れることが困難であり、また同期運転中に容易に同期外れを起こし易いという欠点があった。
【0008】
また、同期トルクを発生する永久磁石は、かご形導体の内側に配置しなくてはならず、永久磁石が発生した磁束は回転子内部で漏れ磁束を生じ易い。このため、十分な同期トルクを得るためには漏れ磁束を考慮して回転子の体格を決定せざるを得ないという欠点もあった。これらの理由から、従来のISM方式は、永久磁石型モータでありながら従来の誘導電動機と比べてあまり小型化することができず、永久磁石が必要である分、高コストとなっていた。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開2001−86676号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
よって本発明の目的は、従来のISM方式の永久磁石型モータの課題を克服し、簡便な構造で、より小型な高効率モータを実現できる回転子を低コストで提供することにある。
【課題を解決するための手段】
【0011】
上述した目的を達成するために、本発明の一態様は、永久磁石式同期モータの回転子であって、回転子鉄心と、前記回転子鉄心に埋設された複数の永久磁石と、前記回転子鉄心の外周面を覆う、導電性材料から形成された筒体とを備え、前記回転子鉄心には、前記永久磁石の表面から前記回転子鉄心の外周面に向かって延びる複数のスリットが形成されていることを特徴とする。
【0012】
本発明の好ましい態様は、前記筒体の軸方向の長さは、前記回転子鉄心の軸方向の長さよりも長く、前記筒体は、前記回転子鉄心の両端部から突出した突出部を有すること特徴とする。
本発明の好ましい態様は、前記筒体の前記突出部には、前記回転子の動的不釣合いを修正するための減肉部が形成されていることを特徴とする。
本発明の好ましい態様は、前記筒体は、銅または銅合金から形成されていることを特徴とする。
本発明の好ましい態様は、前記回転子鉄心の外周面は円筒形状であることを特徴とする。
【0013】
本発明の他の態様は、上記回転子と、回転磁界を発生させる固定子とを備えたことを特徴とする永久磁石式同期モータである。
【発明の効果】
【0014】
導電性材料から構成される筒体は、誘導電動機のかご形導体として機能する。この筒体は回転子鉄心の外周面を覆うように配置されるので、回転子鉄心に埋設される従来のかご形導体に比べて構造が簡単である。しかも、かご形導体が回転子鉄心に存在しないので、永久磁石を回転子鉄心の外周面に近づけて配置することができる。これにより、永久磁石が発生した磁束のほとんどは回転子鉄心の内部で漏れること無く固定子鉄心へ向かうことができ、回転子の体格を従来のISM方式よりも小型にすることができる。さらに、回転子鉄心に形成された複数のスリットは、永久磁石から固定子に向かう磁力線に配向性を与えることができるので、磁力線のゆらぎを抑制して筒体での渦電流の発生を抑制することができる。
【図面の簡単な説明】
【0015】
【図1】本発明の一実施形態に係る回転子を備えた永久磁石式同期モータの断面図を示す図である。
【図2】図1に示す回転子および固定子の断面図を示す図である。
【図3A】スリットが形成されていない回転子鉄心を通る磁力線を示す図である。
【図3B】スリットが形成された回転子鉄心を通る磁力線を示す図である。
【図4】従来のISM方式モータの回転子の一例を示す図である。
【図5】従来のISM方式モータの発生トルクを示す図である。
【発明を実施するための形態】
【0016】
以下、本発明の実施形態について図面を参照して説明する。
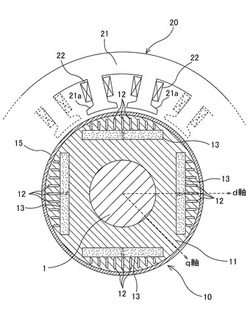
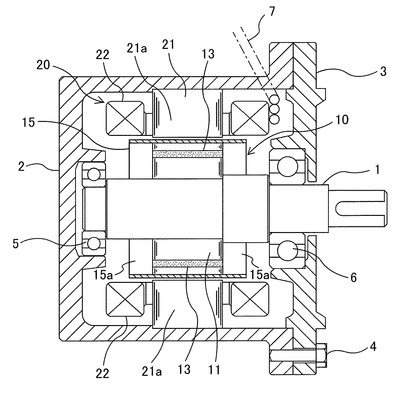
図1は、本発明の一実施形態に係る回転子を備えた永久磁石式同期モータの断面図を示す図であり、図2は図1に示す回転子および固定子の断面図を示す図である。図1に示すように、モータは、軸1と、軸1に固定された回転子10と、回転子10を囲むように配置された固定子20とを備えている。
【0017】
固定子20はモータケーシング2の内周面に固定されている。モータケーシング2の開口端部は、ブラケット3によって閉じられており、ブラケット3はボルト4によりモータケーシング2に固定されている。回転子10、固定子20、および軸1は、モータケーシング2およびブラケット3によって囲まれており、軸1の一部がブラケット3から突出している。
【0018】
モータケーシング2およびブラケット3には、それぞれ軸受5,6が配置されており、これら軸受5,6により軸1が回転自在に支持されている。固定子20は、複数の歯21aを有する固定子鉄心21と、それぞれの歯21aに巻かれた固定子巻線22とを有している。固定子鉄心21の歯21aは、回転子10を囲むように配置されている。固定子巻線22にはリード線7を介して電力が供給される。
【0019】
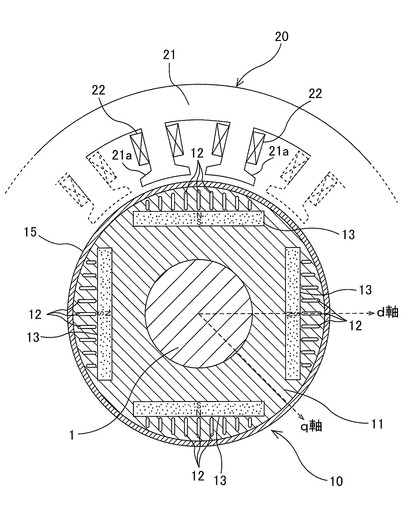
回転子10は、軸1に固定された回転子鉄心11と、回転子鉄心11に埋設された複数の永久磁石13と、回転子鉄心11を覆う筒体15とを備えている。図2に示す例では、4つの永久磁石13が設けられている。回転子鉄心11は電磁鋼板から構成されている。回転子鉄心11には、軸方向に延びる複数のスロット(長孔)が形成されており、これらスロットに永久磁石13が挿入されている。これら永久磁石13は、N極とS極が交互に外側を向くように配列されている。本実施形態の永久磁石式回転子10においては、d軸(磁極中心軸)およびq軸(磁極間軸)のインダクタンスの差を大きくする目的と、安価な形状の磁石を使用する目的から、平板形状でかつ板厚方向に着磁した永久磁石13が使用されている。
【0020】
回転子鉄心11は円筒形状の外周面を有しており、この外周面の横断面形状は円形となっている。回転子鉄心11の外周面は筒体15によって覆われている。すなわち、回転子鉄心11は筒体15内に嵌め込まれており、回転子鉄心11の外周面と筒体15の内周面とは密着している。筒体15は、導電性材料から形成されている。筒体15は、回転子鉄心11と固定子20との間の径方向の隙間内に位置しており、固定子20と筒体15とは非接触となっている。
【0021】
筒体15は、回転子10が自起動を可能とするために設けられている。すなわち、固定子20が発生する回転磁界により筒体15内には誘導電流が流れ、この誘導電流により形成される磁極と回転磁界との間に電磁力が発生する。この電磁力は起動トルクとして回転子10に作用し、これにより回転子10は自起動することができる。
【0022】
筒体15は、回転子鉄心11と固定子20との間の隙間内に位置しているため、できるだけ薄肉であることが好ましい。また、同期引き入れ時のすべりをできるだけ小さくするためには、2次抵抗をできるだけ小さくする必要がある。このような観点から、筒体15は、銅または銅合金などの導電性が良好な材料から形成されることが好ましい。
【0023】
図2に示すように、回転子鉄心11には、各永久磁石13の磁極表面(外側表面)から回転子鉄心11の外周面に向かって延びる複数のスリット(長孔)12が形成されている。これらスリット12は、永久磁石13の外側表面に沿って等間隔に配列されている。
【0024】
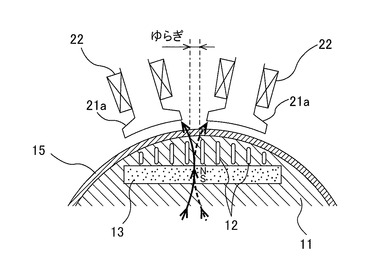
筒体15はモータが商用電源で自起動するために必要であるが、モータが同期運転に入った後は必要の無い要素である。同期運転時においては、回転子10は固定子鉄心21と固定子巻線22による正弦波状の回転磁界に引かれて回転する。固定子鉄心21の内周面と回転子10の外周面との間には、いわゆるエアギャップが形成されている。永久磁石13から発生する磁力線は、回転子鉄心11、筒体15、およびエアギャップを経て固定子鉄心21に到達する。しかしながら、固定子鉄心21の内周面は、複数の歯21aの端面から構成されており、歯21aと歯21aの間には周方向の隙間が形成されている。このような周方向の隙間が存在するため、回転子10の回転に伴い、磁力線の向きがある程度断続的に変化する。
【0025】
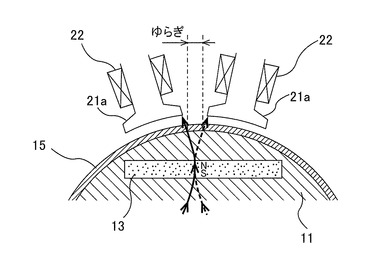
図3Aは、スリット12が形成されていない回転子鉄心11を通る磁力線を示す図である。平板形状の永久磁石13は回転子鉄心11に埋設されているため、永久磁石13の磁極表面と回転子鉄心11の外周面(筒体15の内周面)との間には三日月形状の部分が存在する。この三日月形状の部分は、回転子鉄心11の材料である電磁鋼板から形成されている。電磁鋼板には特に配向性はないので、この三日月形状の部分を通る磁力線は回転子10の外部の磁気抵抗に応じて自由にその向きを変える。
【0026】
図3Aに示すように、歯21aと歯21aの間には周方向の隙間が形成されているので、回転子10の回転に伴って、回転子鉄心11の前記三日月形状の部分を通る磁力線には、ゆらぎが生じる。磁力線がゆらぐとき(すなわち、磁力線の向きが変わるとき)、磁力線が筒体15の内部を移動するため、筒体15には渦電流が生じる。同期運転時に筒体15に発生する渦電流を小さくするためには、隣接する歯間での磁力線のゆらぎをできるだけ小さくする必要がある。
【0027】
図3Bは、スリット12が形成された回転子鉄心11を通る磁力線を示す図である。図3Bに示すように、複数のスリット12が回転子鉄心11に形成されている場合、磁力線はスリット12の間を通ることになるので、磁力線にはある程度配向性が付与される。したがって、磁力線のゆらぎが小さくなる。このように、永久磁石13の外側にスリット12を形成することにより、永久磁石13の表面から回転子鉄心11の外周面に向かう磁力線のゆらぎを抑制することができる。その結果、永久磁石式同期モータが同期運転に入った後、筒体15に渦電流が発生することが抑制され、効率の良い運転を行うことができる。
【0028】
図1に示すように、筒体15の軸方向の長さは、回転子鉄心11の軸方向の長さよりも長くなっている。すなわち、筒体15の両端部が回転子鉄心11の両端部から突出して突出部15a,15aを形成するように、筒体15の内部に回転子鉄心11が嵌め込まれている。これは、筒体15に流れる2次電流を軸方向に揃えるために、筒体15の突出部15a,15aに誘導電動機のエンドリングの役割を持たせるためである。
【0029】
永久磁石13は回転子鉄心11の外周面の近傍に配置することができる。したがって、d軸とq軸とのインダクタンスの差を大きくすることができ、大きなリラクタンストルクを得ることができ、同期引き入れトルクを大きくすることができる。また、永久磁石13が発生した磁束のほとんどは回転子鉄心11の内部で漏れること無く固定子鉄心21へ向かうことができるので、回転子10の体格を従来のISM方式よりも小型にすることができる。即ち、本構造の回転子10を採用するモータは、従来の誘導電動機よりも小さくすることができる。さらに、従来のかご形導体も不要であることから、従来の誘導電動機と比べても同等のコストで高効率モータを実現することが可能になる。
【0030】
回転子10を高速で回転させるためには、回転子10の動的不釣合いを修正する必要がある。上述した薄肉の筒体15は、回転子10の最外周部に位置し、かつ銅或いは銅合金などの比重が大きい材料から構成されているので、回転子10の動的不釣合いを解消するためのバランス調整部材として機能させることができる。すなわち、回転子鉄心11の両端部から突出した筒体15の突出部15a,15aの適切な位置に、孔、凹部、切り欠きなどの減肉部を形成することにより、回転子10の動的不釣合いを修正することができる。このように、筒体15の突出部の一部を除去することで、低コストで動的不釣合いを修正することができる。
【0031】
回転子鉄心11の外周面が円筒形状であるので、筒体15の形状を歪ますことなく、回転子鉄心11を筒体15に嵌入することができる。また、回転子10が液体中で回転するモータであっても、回転子10の回転抵抗を小さくすることができる。さらに、円筒形状の筒体15は、起動時の誘導トルクを発生するときに、パーミアンスが均一になるので脈動トルクを発生しにくいという利点がある。
【0032】
以上述べた実施形態は、本発明が属する技術分野における通常の知識を有する者が本発明を実施できることを目的として記載されたものである。上記実施形態の種々の変形例は、当業者であれば当然になしうることであり、本発明の技術的思想は他の実施形態にも適用しうることである。したがって、本発明は、記載された実施形態に限定されることはなく、特許請求の範囲によって定義される技術的思想に従った最も広い範囲とすべきである。
【符号の説明】
【0033】
1 軸
2 モータケーシング
3 ブラケット
10 回転子
11 回転子鉄心
12 スリット
13 永久磁石
15 筒体
20 固定子
21 固定子鉄心
21a 歯
23 固定子巻線
【技術分野】
【0001】
本発明は、永久磁石式同期モータの回転子に関するものである。
【背景技術】
【0002】
近年、各国においてモータの高効率化を要求する規制が強化されようとしている。従来、ポンプやファン等を駆動するモータとしては、一般に、堅牢かつ安価な誘導電動機が使用されてきた。しかしながら、誘導電動機を高効率化しようとすると、性能のよい高価な電磁鋼板が必要となり、またモータ体格を従来よりも2倍近く大きくすることが必要となる。このため、誘導電動機の高効率化には、コストアップが避けられないと共にモータの大型化が避けられない。
【0003】
一方、誘導電動機よりも一般に高効率が実現できるモータとして、永久磁石式同期モータがある。しかしながら、この永久磁石式同期モータは、商用電源での自起動ができず、インバータ装置を併用しなくてはならない。このため、永久磁石式同期モータは、従来の誘導電動機に比べるとかなり高価なものとなっている。
【0004】
そこで、自起動が可能な永久磁石式モータとして、モータの回転子に誘導電動機のかご形導体と永久磁石を併設した所謂ISM方式(誘導同期方式)のモータが近年注目されている。このISM方式モータの回転子としては、様々な構造のものが提案されている。図4に、ISM方式モータの回転子の一例を示す。図4に示すように、ISM方式モータの回転子は、誘導電動機に使用されるかご形導体50と、永久磁石式モータに使用される永久磁石51とが回転子鉄心52に埋設された構造を有している。
【0005】
しかしながら、これまで提案されてきたISM方式モータの回転子のほとんどが、従来の誘導電動機のかご形導体の内側に永久磁石を配置した構造のものであることから、従来の誘導電動機に比べてもあまり小型化することができなかった。また、ISM方式モータの製造方法は、従来の誘導電動機の製造工程に加えて、永久磁石を配置する工程がさらに必要になるので、上記誘導電動機を高効率化する場合と同様のコストがかかり、これまでにあまり実用化が進んでいない。
【0006】
図5にISM方式モータの発生トルクのグラフを示す。図5に示すように、ISM方式のモータには、かご形導体による誘導トルクと永久磁石による同期トルクとが混在している。この2つのトルクは交差することは無く、起動時は誘導トルクのみにて回転子を加速し、運転時には永久磁石による同期トルクのみで回転子を回転させる。これら誘導トルクと同期トルクとを滑らかに繋げるためには、図5に示すように、これら2つのトルク以外の第3のトルク、即ち同期引き入れトルクが必要である。また、同期速度でモータを駆動するためには、同期引き入れトルクは負荷トルクよりも大きくなければならない。
【0007】
大きな同期引き入れトルクを発生させるためには、回転子鉄心と固定子の回転磁界との間に生じるリラクタンストルクを大きくすればよいことが知られている。即ち回転子の内部に埋設された永久磁石の磁極中心を通るd軸と磁極間を通るq軸(図4参照)との間のインダクタンスの変化を大きくすることで前記リラクタンストルクを大きくすることができる。しかしながら、図4に示す従来のISM方式の回転子では、固定子に対向する回転子の外周面の近傍にかご形導体が配置されているので、前記リラクタンストルクが小さくなってしまう。その結果、回転子を確実に同期速度に引き入れることが困難であり、また同期運転中に容易に同期外れを起こし易いという欠点があった。
【0008】
また、同期トルクを発生する永久磁石は、かご形導体の内側に配置しなくてはならず、永久磁石が発生した磁束は回転子内部で漏れ磁束を生じ易い。このため、十分な同期トルクを得るためには漏れ磁束を考慮して回転子の体格を決定せざるを得ないという欠点もあった。これらの理由から、従来のISM方式は、永久磁石型モータでありながら従来の誘導電動機と比べてあまり小型化することができず、永久磁石が必要である分、高コストとなっていた。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開2001−86676号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
よって本発明の目的は、従来のISM方式の永久磁石型モータの課題を克服し、簡便な構造で、より小型な高効率モータを実現できる回転子を低コストで提供することにある。
【課題を解決するための手段】
【0011】
上述した目的を達成するために、本発明の一態様は、永久磁石式同期モータの回転子であって、回転子鉄心と、前記回転子鉄心に埋設された複数の永久磁石と、前記回転子鉄心の外周面を覆う、導電性材料から形成された筒体とを備え、前記回転子鉄心には、前記永久磁石の表面から前記回転子鉄心の外周面に向かって延びる複数のスリットが形成されていることを特徴とする。
【0012】
本発明の好ましい態様は、前記筒体の軸方向の長さは、前記回転子鉄心の軸方向の長さよりも長く、前記筒体は、前記回転子鉄心の両端部から突出した突出部を有すること特徴とする。
本発明の好ましい態様は、前記筒体の前記突出部には、前記回転子の動的不釣合いを修正するための減肉部が形成されていることを特徴とする。
本発明の好ましい態様は、前記筒体は、銅または銅合金から形成されていることを特徴とする。
本発明の好ましい態様は、前記回転子鉄心の外周面は円筒形状であることを特徴とする。
【0013】
本発明の他の態様は、上記回転子と、回転磁界を発生させる固定子とを備えたことを特徴とする永久磁石式同期モータである。
【発明の効果】
【0014】
導電性材料から構成される筒体は、誘導電動機のかご形導体として機能する。この筒体は回転子鉄心の外周面を覆うように配置されるので、回転子鉄心に埋設される従来のかご形導体に比べて構造が簡単である。しかも、かご形導体が回転子鉄心に存在しないので、永久磁石を回転子鉄心の外周面に近づけて配置することができる。これにより、永久磁石が発生した磁束のほとんどは回転子鉄心の内部で漏れること無く固定子鉄心へ向かうことができ、回転子の体格を従来のISM方式よりも小型にすることができる。さらに、回転子鉄心に形成された複数のスリットは、永久磁石から固定子に向かう磁力線に配向性を与えることができるので、磁力線のゆらぎを抑制して筒体での渦電流の発生を抑制することができる。
【図面の簡単な説明】
【0015】
【図1】本発明の一実施形態に係る回転子を備えた永久磁石式同期モータの断面図を示す図である。
【図2】図1に示す回転子および固定子の断面図を示す図である。
【図3A】スリットが形成されていない回転子鉄心を通る磁力線を示す図である。
【図3B】スリットが形成された回転子鉄心を通る磁力線を示す図である。
【図4】従来のISM方式モータの回転子の一例を示す図である。
【図5】従来のISM方式モータの発生トルクを示す図である。
【発明を実施するための形態】
【0016】
以下、本発明の実施形態について図面を参照して説明する。
図1は、本発明の一実施形態に係る回転子を備えた永久磁石式同期モータの断面図を示す図であり、図2は図1に示す回転子および固定子の断面図を示す図である。図1に示すように、モータは、軸1と、軸1に固定された回転子10と、回転子10を囲むように配置された固定子20とを備えている。
【0017】
固定子20はモータケーシング2の内周面に固定されている。モータケーシング2の開口端部は、ブラケット3によって閉じられており、ブラケット3はボルト4によりモータケーシング2に固定されている。回転子10、固定子20、および軸1は、モータケーシング2およびブラケット3によって囲まれており、軸1の一部がブラケット3から突出している。
【0018】
モータケーシング2およびブラケット3には、それぞれ軸受5,6が配置されており、これら軸受5,6により軸1が回転自在に支持されている。固定子20は、複数の歯21aを有する固定子鉄心21と、それぞれの歯21aに巻かれた固定子巻線22とを有している。固定子鉄心21の歯21aは、回転子10を囲むように配置されている。固定子巻線22にはリード線7を介して電力が供給される。
【0019】
回転子10は、軸1に固定された回転子鉄心11と、回転子鉄心11に埋設された複数の永久磁石13と、回転子鉄心11を覆う筒体15とを備えている。図2に示す例では、4つの永久磁石13が設けられている。回転子鉄心11は電磁鋼板から構成されている。回転子鉄心11には、軸方向に延びる複数のスロット(長孔)が形成されており、これらスロットに永久磁石13が挿入されている。これら永久磁石13は、N極とS極が交互に外側を向くように配列されている。本実施形態の永久磁石式回転子10においては、d軸(磁極中心軸)およびq軸(磁極間軸)のインダクタンスの差を大きくする目的と、安価な形状の磁石を使用する目的から、平板形状でかつ板厚方向に着磁した永久磁石13が使用されている。
【0020】
回転子鉄心11は円筒形状の外周面を有しており、この外周面の横断面形状は円形となっている。回転子鉄心11の外周面は筒体15によって覆われている。すなわち、回転子鉄心11は筒体15内に嵌め込まれており、回転子鉄心11の外周面と筒体15の内周面とは密着している。筒体15は、導電性材料から形成されている。筒体15は、回転子鉄心11と固定子20との間の径方向の隙間内に位置しており、固定子20と筒体15とは非接触となっている。
【0021】
筒体15は、回転子10が自起動を可能とするために設けられている。すなわち、固定子20が発生する回転磁界により筒体15内には誘導電流が流れ、この誘導電流により形成される磁極と回転磁界との間に電磁力が発生する。この電磁力は起動トルクとして回転子10に作用し、これにより回転子10は自起動することができる。
【0022】
筒体15は、回転子鉄心11と固定子20との間の隙間内に位置しているため、できるだけ薄肉であることが好ましい。また、同期引き入れ時のすべりをできるだけ小さくするためには、2次抵抗をできるだけ小さくする必要がある。このような観点から、筒体15は、銅または銅合金などの導電性が良好な材料から形成されることが好ましい。
【0023】
図2に示すように、回転子鉄心11には、各永久磁石13の磁極表面(外側表面)から回転子鉄心11の外周面に向かって延びる複数のスリット(長孔)12が形成されている。これらスリット12は、永久磁石13の外側表面に沿って等間隔に配列されている。
【0024】
筒体15はモータが商用電源で自起動するために必要であるが、モータが同期運転に入った後は必要の無い要素である。同期運転時においては、回転子10は固定子鉄心21と固定子巻線22による正弦波状の回転磁界に引かれて回転する。固定子鉄心21の内周面と回転子10の外周面との間には、いわゆるエアギャップが形成されている。永久磁石13から発生する磁力線は、回転子鉄心11、筒体15、およびエアギャップを経て固定子鉄心21に到達する。しかしながら、固定子鉄心21の内周面は、複数の歯21aの端面から構成されており、歯21aと歯21aの間には周方向の隙間が形成されている。このような周方向の隙間が存在するため、回転子10の回転に伴い、磁力線の向きがある程度断続的に変化する。
【0025】
図3Aは、スリット12が形成されていない回転子鉄心11を通る磁力線を示す図である。平板形状の永久磁石13は回転子鉄心11に埋設されているため、永久磁石13の磁極表面と回転子鉄心11の外周面(筒体15の内周面)との間には三日月形状の部分が存在する。この三日月形状の部分は、回転子鉄心11の材料である電磁鋼板から形成されている。電磁鋼板には特に配向性はないので、この三日月形状の部分を通る磁力線は回転子10の外部の磁気抵抗に応じて自由にその向きを変える。
【0026】
図3Aに示すように、歯21aと歯21aの間には周方向の隙間が形成されているので、回転子10の回転に伴って、回転子鉄心11の前記三日月形状の部分を通る磁力線には、ゆらぎが生じる。磁力線がゆらぐとき(すなわち、磁力線の向きが変わるとき)、磁力線が筒体15の内部を移動するため、筒体15には渦電流が生じる。同期運転時に筒体15に発生する渦電流を小さくするためには、隣接する歯間での磁力線のゆらぎをできるだけ小さくする必要がある。
【0027】
図3Bは、スリット12が形成された回転子鉄心11を通る磁力線を示す図である。図3Bに示すように、複数のスリット12が回転子鉄心11に形成されている場合、磁力線はスリット12の間を通ることになるので、磁力線にはある程度配向性が付与される。したがって、磁力線のゆらぎが小さくなる。このように、永久磁石13の外側にスリット12を形成することにより、永久磁石13の表面から回転子鉄心11の外周面に向かう磁力線のゆらぎを抑制することができる。その結果、永久磁石式同期モータが同期運転に入った後、筒体15に渦電流が発生することが抑制され、効率の良い運転を行うことができる。
【0028】
図1に示すように、筒体15の軸方向の長さは、回転子鉄心11の軸方向の長さよりも長くなっている。すなわち、筒体15の両端部が回転子鉄心11の両端部から突出して突出部15a,15aを形成するように、筒体15の内部に回転子鉄心11が嵌め込まれている。これは、筒体15に流れる2次電流を軸方向に揃えるために、筒体15の突出部15a,15aに誘導電動機のエンドリングの役割を持たせるためである。
【0029】
永久磁石13は回転子鉄心11の外周面の近傍に配置することができる。したがって、d軸とq軸とのインダクタンスの差を大きくすることができ、大きなリラクタンストルクを得ることができ、同期引き入れトルクを大きくすることができる。また、永久磁石13が発生した磁束のほとんどは回転子鉄心11の内部で漏れること無く固定子鉄心21へ向かうことができるので、回転子10の体格を従来のISM方式よりも小型にすることができる。即ち、本構造の回転子10を採用するモータは、従来の誘導電動機よりも小さくすることができる。さらに、従来のかご形導体も不要であることから、従来の誘導電動機と比べても同等のコストで高効率モータを実現することが可能になる。
【0030】
回転子10を高速で回転させるためには、回転子10の動的不釣合いを修正する必要がある。上述した薄肉の筒体15は、回転子10の最外周部に位置し、かつ銅或いは銅合金などの比重が大きい材料から構成されているので、回転子10の動的不釣合いを解消するためのバランス調整部材として機能させることができる。すなわち、回転子鉄心11の両端部から突出した筒体15の突出部15a,15aの適切な位置に、孔、凹部、切り欠きなどの減肉部を形成することにより、回転子10の動的不釣合いを修正することができる。このように、筒体15の突出部の一部を除去することで、低コストで動的不釣合いを修正することができる。
【0031】
回転子鉄心11の外周面が円筒形状であるので、筒体15の形状を歪ますことなく、回転子鉄心11を筒体15に嵌入することができる。また、回転子10が液体中で回転するモータであっても、回転子10の回転抵抗を小さくすることができる。さらに、円筒形状の筒体15は、起動時の誘導トルクを発生するときに、パーミアンスが均一になるので脈動トルクを発生しにくいという利点がある。
【0032】
以上述べた実施形態は、本発明が属する技術分野における通常の知識を有する者が本発明を実施できることを目的として記載されたものである。上記実施形態の種々の変形例は、当業者であれば当然になしうることであり、本発明の技術的思想は他の実施形態にも適用しうることである。したがって、本発明は、記載された実施形態に限定されることはなく、特許請求の範囲によって定義される技術的思想に従った最も広い範囲とすべきである。
【符号の説明】
【0033】
1 軸
2 モータケーシング
3 ブラケット
10 回転子
11 回転子鉄心
12 スリット
13 永久磁石
15 筒体
20 固定子
21 固定子鉄心
21a 歯
23 固定子巻線
【特許請求の範囲】
【請求項1】
永久磁石式同期モータの回転子であって、
回転子鉄心と、
前記回転子鉄心に埋設された複数の永久磁石と、
前記回転子鉄心の外周面を覆う、導電性材料から形成された筒体とを備え、
前記回転子鉄心には、前記永久磁石の表面から前記回転子鉄心の外周面に向かって延びる複数のスリットが形成されていることを特徴とする回転子。
【請求項2】
前記筒体の軸方向の長さは、前記回転子鉄心の軸方向の長さよりも長く、前記筒体は、前記回転子鉄心の両端部から突出した突出部を有すること特徴とする請求項2に記載の回転子。
【請求項3】
前記筒体の前記突出部には、前記回転子の動的不釣合いを修正するための減肉部が形成されていることを特徴とする請求項2に記載の回転子。
【請求項4】
前記筒体は、銅または銅合金から形成されていることを特徴とする請求項1乃至3のいずれか一項に記載の回転子。
【請求項5】
前記回転子鉄心の外周面は円筒形状であることを特徴とする請求項1乃至4のいずれか一項に記載の回転子。
【請求項6】
請求項1乃至5のいずれか一項に記載の回転子と、
回転磁界を発生させる固定子とを備えたことを特徴とする永久磁石式同期モータ。
【請求項1】
永久磁石式同期モータの回転子であって、
回転子鉄心と、
前記回転子鉄心に埋設された複数の永久磁石と、
前記回転子鉄心の外周面を覆う、導電性材料から形成された筒体とを備え、
前記回転子鉄心には、前記永久磁石の表面から前記回転子鉄心の外周面に向かって延びる複数のスリットが形成されていることを特徴とする回転子。
【請求項2】
前記筒体の軸方向の長さは、前記回転子鉄心の軸方向の長さよりも長く、前記筒体は、前記回転子鉄心の両端部から突出した突出部を有すること特徴とする請求項2に記載の回転子。
【請求項3】
前記筒体の前記突出部には、前記回転子の動的不釣合いを修正するための減肉部が形成されていることを特徴とする請求項2に記載の回転子。
【請求項4】
前記筒体は、銅または銅合金から形成されていることを特徴とする請求項1乃至3のいずれか一項に記載の回転子。
【請求項5】
前記回転子鉄心の外周面は円筒形状であることを特徴とする請求項1乃至4のいずれか一項に記載の回転子。
【請求項6】
請求項1乃至5のいずれか一項に記載の回転子と、
回転磁界を発生させる固定子とを備えたことを特徴とする永久磁石式同期モータ。
【図1】


【図2】
【図3A】
【図3B】
【図4】
【図5】
【図2】
【図3A】
【図3B】
【図4】
【図5】
【公開番号】特開2012−152073(P2012−152073A)
【公開日】平成24年8月9日(2012.8.9)
【国際特許分類】
【出願番号】特願2011−10421(P2011−10421)
【出願日】平成23年1月21日(2011.1.21)
【出願人】(000000239)株式会社荏原製作所 (1,477)
【Fターム(参考)】
【公開日】平成24年8月9日(2012.8.9)
【国際特許分類】
【出願日】平成23年1月21日(2011.1.21)
【出願人】(000000239)株式会社荏原製作所 (1,477)
【Fターム(参考)】
[ Back to top ]