
洗車機
【課題】 本発明は、自動車の種類や車体部位に関係なく車体側面の乾燥性能を向上することができる洗車機を提供することを目的とするものである。
【解決手段】 上面乾燥ノズル6を車体上面形状に沿って昇降する昇降装置16と、側面上部乾燥ノズル7を車体側面形状に応じて幅方向に揺動する左右揺動装置32と、上面形状検出装置10及び側面形状検出装置11で検出される上面形状及び側面形状に基づいて昇降装置16及び左右揺動装置32を制御する洗車制御ボード35を備えた洗車機であって、洗車制御ボード35は、自動車の上面形状から複数の車形基準点を検知し、各車形基準点で区切られた車体部位毎に自動車の上面形状及び側面形状による揺動装置の揺動角度を設定して揺動装置32を制御する。
【解決手段】 上面乾燥ノズル6を車体上面形状に沿って昇降する昇降装置16と、側面上部乾燥ノズル7を車体側面形状に応じて幅方向に揺動する左右揺動装置32と、上面形状検出装置10及び側面形状検出装置11で検出される上面形状及び側面形状に基づいて昇降装置16及び左右揺動装置32を制御する洗車制御ボード35を備えた洗車機であって、洗車制御ボード35は、自動車の上面形状から複数の車形基準点を検知し、各車形基準点で区切られた車体部位毎に自動車の上面形状及び側面形状による揺動装置の揺動角度を設定して揺動装置32を制御する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自動車車体の乾燥性能を向上する機能を備えた洗車機に関するものである。
【背景技術】
【0002】
従来の洗車機には、主に車体上面の乾燥を図る上面ノズルと、主に車体側面の乾燥を図る側面ノズルを備えた乾燥装置が搭載され、上面ノズルを車体の上面形状に合わせて昇降させ、側面ノズルを車体の側面形状に合わせて開閉させて乾燥効率を向上させるようにしている。これら乾燥ノズルは、相互の送風が干渉しないよう、側面ノズルを車体側面の下部側に配置しているため、ワゴン車などの車高が高い自動車を乾燥する場合、車体側面の上部に側面ノズルからの送風が作用しにくく水滴が残りやすくなるという問題があった。
【0003】
この点、特許文献1では、上面ノズルの長手方向端部に、車体側面上部に臨むサブ乾燥用ノズルを設けている。この構成によれば、ワゴン車のように車高が高い車両を乾燥する場合であっても、車体側面の水滴が確実に除去できるものである。しかしながら、このサブ乾燥用ノズルは、固定式で送風方向は常に一定であるため、車体側面が傾斜している自動車や車幅の狭い自動車には対応しきれない。また、自動車の停車位置は、ドライバーの技量に依存されるため、一方に片寄った状態や斜行した状態で停車されることもあり、均一な乾燥効果を発揮することが困難であった。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2004−237932号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明は、自動車の種類や車体部位に関係なく車体側面の乾燥性能を向上することができる洗車機を提供することを目的とするものである。
【課題を解決するための手段】
【0006】
この課題を解決するため本発明は、門型に形成された本体フレームに、自動車車体の上面に送風する上面乾燥ノズルと、上面乾燥ノズルの両側面に取り付けられ自動車車体の側面上部に送風する側面上部乾燥ノズルと、該上面乾燥ノズルを車体上面形状に沿って昇降する昇降装置と、該側面上部乾燥ノズルを車体側面形状に応じて幅方向に揺動する揺動装置と、自動車の上面形状を検出する上面形状検出装置と、自動車の側面形状を検出する側面形状検出装置と、前記上面形状検出装置及び側面形状検出装置で検出される上面形状及び側面形状に基づいて昇降装置及び揺動装置を制御する洗車制御手段を備えた洗車機であって、該洗車制御手段は、自動車の上面形状から複数の車形基準点を検知し、各車形基準点で区切られた車体部位毎に自動車の上面形状及び側面形状による揺動装置の揺動角度を設定して揺動装置を制御することを特徴とするものである。
【発明の効果】
【0007】
本発明によれば、自動車の種類や車体部位に関係なく車体側面の乾燥性能を向上することができる。
【図面の簡単な説明】
【0008】
【図1】本発明を備えた洗車機を示す平面図である。
【図2】昇降装置16の構成を示す説明図である。
【図3】前後揺動装置17の構成を示す説明図である。
【図4】左右揺動装置32の構成を示す説明図である。
【図5】側面形状検出装置11の構成を示す説明図である。
【図6】制御系を示すブロック図である。
【図7】車体部位毎のブロワノズル7の動作を示す説明図である。
【図8】普通車の乾燥状態を示す説明図である。
【図9】片寄り停車の普通車に対する乾燥状態を示す説明図である。
【図10】ワンボックス車の乾燥状態を示す説明図である。
【図11】軽自動車の乾燥状態を示す説明図である。
【発明を実施するための最良の形態】
【0009】
以下、図面を基に、本発明の実施態様について説明する。
図1は本発明を備えた洗車機を示す平面図である。
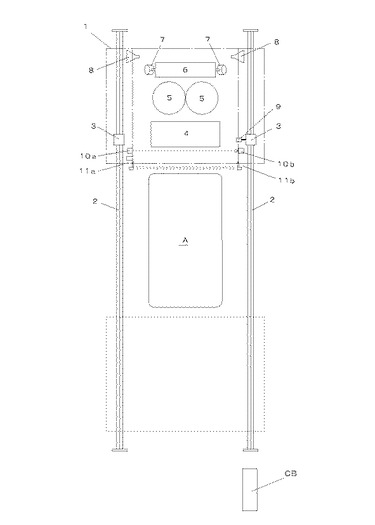
1は本体フレームで、門型に形成され、床面に敷設されたレール2・2上を走行モータ3に駆動されて往復走行する。本体フレーム1は、図1に示すように、レール2・2で与えられる走行範囲の後端部に停止し、この位置から洗車を開始する。本体フレーム1には、洗車処理を行う各種の処理装置として、ブラシ装置4・5・5,ブロワノズル6・7・7・8・8をはじめ散水ノズル(図示しない)等が備えられ、走行モータ3の駆動による本体フレーム1の走行に伴って水,洗剤,ワックス等を散布してブラッシングする洗浄作業やブロワノズルより空気を吹き付ける乾燥作業を行う。
【0010】
前記ブラシ装置は、車体上面に沿って昇降し同上面をブラッシングする上面ブラシ装置4と、上面ブラシ装置4の後方に位置し車体に対して接離(開閉)動作し車体の前後面および側面をブラッシングする左右一対の側面ブラシ装置5・5とからなり、本体フレーム1の前側に洗浄部を形成している。
【0011】
前記ブロワノズルは、車体上面に沿って昇降し同上面に空気を吹き付けて乾燥をはかる上面ブロワノズル6と、上面ブロワノズル6の長手方向端部に取り付けられ車体側面上部に空気を吹き付けて乾燥をはかる左右一対の側面上部ブロワノズル7・7と、上面ブロワノズル6より本体フレーム1後方に位置し車体側面に空気を吹き付けて乾燥をはかる左右一対の側面下部ブロワノズル8・8とからなり、本体フレーム1の後側に乾燥部を形成している。
【0012】
9は走行エンコーダで、走行モータ3の出力軸に連係され、本体フレーム1が単位距離走行する毎にパルス出力し、そのパルス信号をカウントすることで本体フレーム1の走行位置を検知する。
【0013】
10は上面形状検出装置で、本体フレーム1内面のブラシ装置より前位置に設けられ、複数の発光素子を上下に配列させた発光部10aと、これに対応して複数の受光素子を上下に配列した受光部10bとを対向させてあり、前記エンコーダ9からのパルス信号に同期して両者間で光信号(赤外光)の授受を行い、これにより洗車する車体の上面位置を検出し、更にこれに伴いボンネット、ウィンドウ、ルーフ、トランクといった自動車の各部位、自動車の車種、突起物の位置と種別等を検出する。
【0014】
11は側面形状検出装置で、本体フレーム1内面の上面形状検出装置10より前位置に設けられ、超音波センサを上下に複数配列させた形状検出部11aと、超音波センサを単体で取り付けた車幅検出部11bとを備え、車体側面に超音波を照射し、車体面で反射して戻ってくるまでの時間から車体側面との距離を測定するとともに、車体側面の傾斜を検出する。
【0015】
CBは操作ボックスで、レール2・2で与えられる本体フレーム1の走行範囲(洗車エリア)に入る手前で自動車の運転席から操作可能な高さに設けられる料金投入と洗車内容の選択入力等の操作を受け付ける。
【0016】
本体フレーム1は、自動車が通り抜け可能なスペースに設置され、レール2・2で与えられる本体フレーム1の走行範囲を洗車エリアとしており、洗車を受ける自動車Aは、操作ボックスCBで洗車受付を行った後、この洗車エリアに前方から進入し、洗車が終了すると洗車エリアの後方へ退場する。すなわち、自動車は前進走行して進入し、洗車後は同じく前進走行して退場するもので、洗車装置利用客(ドライバー)が自動車に乗ったまま洗車を受けて通り抜けるドライブスルー洗車を可能にしている。
【0017】
続いて、図2〜4を用いてブロワノズルのうち、上面ブロワノズル6と側面上部ブロワノズル7の構成について説明する。
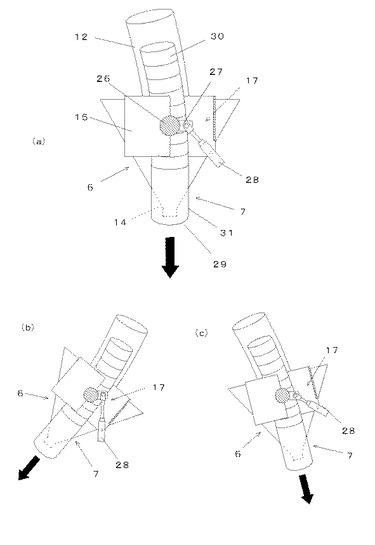
上面ブロワノズル6は、側面視漏斗状をなし、上面にダクトホース12が接続される接続筒部13を形成し、下面にスリット状の送風口14を開口し、両側面に支持枠15を連設しており、昇降装置16により上下方向に昇降されるとともに、前後揺動装置17により前後方向に揺動される。
【0018】
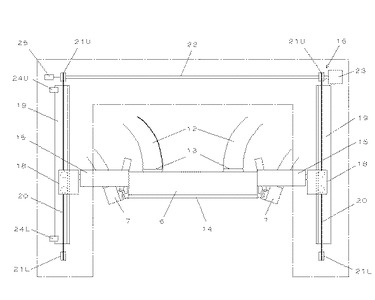
昇降装置16は、図2に示すように、上面ブロワノズル6及び側面上部ブロワノズル7を自動車の高さに応じて上下方向に昇降させるための機構で、上面ブロワノズル6の支持枠15の外面に接続される台車18と、本体フレーム1の内側部に立設した昇降レール19と、台車18の上下に連結されるチェーン20と、このチェーン20が懸回される上下スプロケット21U・21Lと、左右の上スプロケット21U・21U同士を連結する回転軸22と、この回転軸を正逆転する昇降モータ23とから構成されている。24U・24Lはリミットスイッチで、それぞれレール19の上下端近傍に備えられ、台車18の昇降限界位置を検出する。25は昇降エンコーダで、回転軸22の一端に連結され、回転軸22の回転方向を検出しながら単位角度回転毎にパルス信号を出力して上面ブロワノズル6の昇降位置を与えている。
【0019】
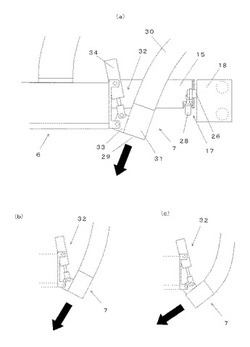
前後揺動装置17は、図3に示すように、上面ブロワノズル6及び側面上部ブロワノズル7を前後方向に揺動させて風向を切り替えるための機構で、支持枠15と台車18を回転軸26で軸支して揺動自在とし、回転軸26に固定される固定片27にロット部を軸支し、支持枠15の後側下部にシリンダ部を軸支したエアシリンダ28で揺動される。通常、上面ブロワノズル6は、エアシリンダ28のロット部を縮めた状態で、送風口14が垂直下向きに指向した位置にあり(a)、エアシリンダ28に空気を導入しロット部を伸ばすと、回転軸26を中心に回転し、本体フレーム1の前方下向きに所定角度指向した位置に揺動する(b)。
【0020】
側面上部ブロワノズル7・7は、上面ブロワノズル6の両側面における支持枠15で囲まれた空間内に設けられ、下向きに送風口29を開口し、上面にダクトホース30が接続される略筒状のノズル体31からなり、首振り装置32により左右方向に揺動される。
【0021】
ノズル体31は、ダクトホース30からの送風をそのままの勢いで吹き出すもので、車体側面の上部に向けて送風するように、垂直下向きからわずかに内側に傾斜した姿勢で取り付けられている。このノズル体31の送風口29の形状は、円形であればよいが、それ以外にも楕円・多角形・近似円等でも良い。本出願人の実験によれば、短辺/長辺=0.2以上の長方形で囲まれる範囲で開口形状を設定すれば、車体面に対して十分な効果が得られた。
【0022】
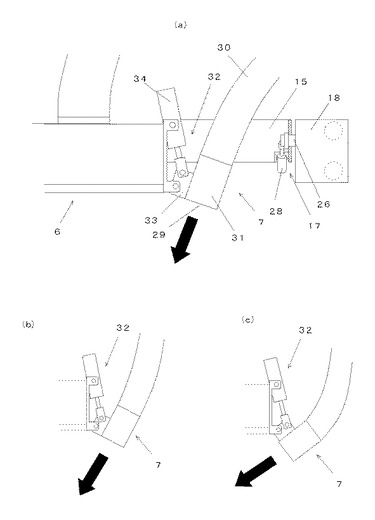
左右揺動装置32は、図4に示すように、側面上部ブロワノズル7・7を左右方向に揺動させて送風口29の風向を切り替えるための機構で、ノズル体31の外周面に設けた支持片33の下部を上面ブロワノズル6の側面に軸支して揺動自在とし、支持片33の上部にロット部を軸支し、上面ブロワノズル6の側面上部にシリンダ部を軸支したエアシリンダ34で揺動される。通常、側面上部ブロワノズル7・7は、エアシリンダ34のロット部を縮めた状態で、送風口29が垂直下向きから僅かに内側に指向した位置にあり(a)、エアシリンダ34に空気を導入しロット部を伸ばすことで、支持片33の下部を中心に回転し、本体フレーム1の内向きに角度θ1指向した位置(b)と、更に内向きに角度θ2指向した位置(c)に揺動する。
【0023】
尚、これらブロワノズルは、特に図示しないが、ダクトホース12・30を送風ブロワに接続して高圧風が供給される。送風ブロワは、各ブロワノズル毎に設置しても良いし、分岐風路を介してそれぞれのブロワノズルに分配送風しても良い。また、揺動装置17,32として、本実施例ではエアシリンダを使用し、所定角度単位で段階的に揺動するようにしているが、モータ等を用いて無段階に首振りさせるようにしても良い。
【0024】
このような構成により、上面ブロワノズル6は、昇降装置16によって車体の上面形状に沿って昇降され、車体上面との距離を適正に保持しながらブロワ乾燥を行う。また、前後揺動装置17によって車体の前後面に対して適正な送風角度でブロワ乾燥を行う。側面上部ブロワノズル7・7は、左右揺動装置32によって車体の側面形状に合わせて揺動され、車体側面上部に指向させてブロワ乾燥を行う。また、上面ブロワノズル6の前後揺動装置17によって車体の前後方向へも揺動され、上面ブロワノズル6と協同して車体の前後面に対してブロワ乾燥を行うものである。
【0025】
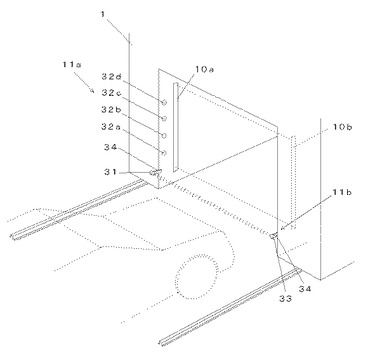
図5は側面形状検出装置11の構成を示している。
形状検出部11aは、本体フレーム1の一方内面に形成され、自動車の進入を検出する超音波センサ31と、上下等間隔Lに配列した超音波センサ32a〜32dを備えている。車幅検出部11bは、本体フレーム1の他方内面に形成され、形状検出部11aの超音波センサ31と対をなす超音波センサ33を備えている。
【0026】
超音波センサ31・33は、それぞれ本体フレーム1の前面から支持アーム34により前方に突出させた状態で、確実な車体認識と消防法の観点から地上高60cmを目安に取り付けられ、入車待機中においてセンサ31を送信用・センサ33を受信用(むろんその逆でもよい)として使用することで透過型検出器として機能させ、自動車が進入してきたことを検出する。また、洗車中において各センサ31・33を反射型検出器として機能させ、車体側面に超音波を送受して車体側面との距離を測定し、自動車の車幅と形状を検出する。
【0027】
超音波センサ32a〜32dは、本体フレーム1の内面に適宜間隔をあけて配列され、車体側面に超音波を送受して車体側面との距離を測定し、各センサでの車体検出点を直線で結んで側面輪郭を検出する。超音波センサ32aは、超音波センサ31から間隔L上部に位置し、普通車のドアと窓の切替付近に超音波を照射し、超音波センサ32bは、超音波センサ32aから間隔L上部に位置し、普通車の窓に超音波を照射し、超音波センサ32cは、超音波センサ32bから間隔L上部に位置し、普通車の窓とルーフの切替付近でワゴン車の窓付近に超音波を照射し、超音波センサ32dは、超音波センサ32cから間隔L上部に位置し、ワゴン車の窓とルーフの切替付近に超音波を照射する。
【0028】
これにより、超音波センサ31を最下位・超音波センサ32dを最上位として車体検出点が測定され、各検出点の座標データに基づいて直線化し車体側面形状を検出するものである。
【0029】
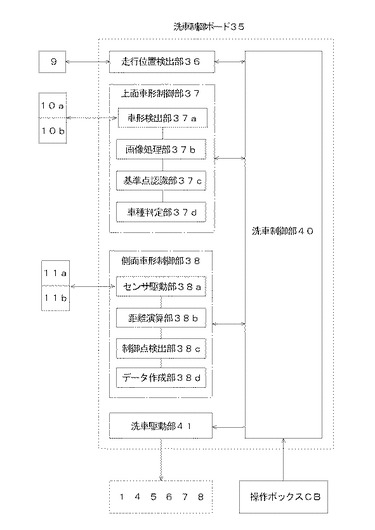
図6は制御系を示すブロック図である。
35は洗車制御ボードで、走行位置検出部36・上面車形制御部37・側面車形制御部38・洗車制御部39を備え、走行エンコーダ9から得た情報に基づき、自動車の位置,形状,装備等の車形データを認識するとともに、この車形データに基づいて洗車駆動ボード40を介してブラシ,ブロワノズル等の洗車処理装置を作動させ、自動車の位置,形状,装備等に合わせて洗車を行うものである。
【0030】
走行位置検出部36は、走行エンコーダ9から発信されるパルス信号をカウントして本体フレーム1の走行位置を検出する。
【0031】
上面車形制御部37は、車形検出部37a・画像処理部37b・基準点認識部37c・車種判別部37dを備えている。
車形検出部37aは、本体フレーム1の走行に伴う走行エンコーダ9からのパルス信号をトリガにして上面形状検出装置10の透光/遮光データを取り込み、走行位置検出部36で与える本体フレーム1の走行位置と対応させて2値画像データを作成する。こうして作成される2値画像データは、横軸を洗車機本体1及び台車11の所定走行ピッチ、縦軸を光軸の配列ピッチとした画素をマトリックス状に展開し、透光の場合は白、遮光の場合は黒として表現される。
【0032】
画像処理部37bは、車形検出部37aで作成した2値画像データを画像処理して自動車の上面輪郭を抽出する。画像処理は、2値画像データのすべての画素に対して所定条件の論理フィルターをかけ、隣接する画素パターンよって検出画素の2値データを変更し、縦方向での透光画素と遮光画素の境界画素を車体上面位置として横方向に連続した自動車の上面輪郭を抽出する。
【0033】
基準点認識部37cは、上面輪郭に基づき自動車の基準点となる車体前端・ボンネットとフロントガラスの境界・ルーフ前端・ルーフ後端・車体後端を認識する。すなわち、車体前端は、上面レベルが予め設定された車体下限高さを越えた点を検出して認識される。ボンネットとフロントガラスの境界は、上面レベルが予め設定されたルーフ下限高さに達するまでの間で、且つ車体前端から所定距離離れたことを条件に、本体フレーム1が所定距離走行する間に上面レベルが所定値以上上昇した点を検出して認識される。尚、ワンボックス車においては、ボンネットがないため、この条件を満たす部位ができないので、上面レベルがルーフ下限高さに達した点で境界の認識を諦めて、次の基準点の認識に移行する。ルーフ前端は、上面レベルが予め設定されたルーフ下限高さ以上にあることを条件に、本体フレームが所定距離走行する間に上面レベルが所定値以上上昇しなくなった点を検出して認識される。ルーフ後端は、上面レベルがルーフ前端の高さから所定値以上下降した点を検出して認識される。車体後端は、上面レベルが車体下限高さを下回った点を検出して認識される。
【0034】
車種判別部37dは、基準点認識部37cで認識した自動車の基準点から洗浄する自動車の車種を判別する。すなわち、ボンネットとフロントガラスの境界があれば普通車、無ければワンボックス車を判別する。
【0035】
側面車形制御部38は、センサ駆動部38a・距離演算部38b・制御点検出部38c・データ作成部38dを備えている。
センサ駆動部38aは、本体フレーム1が所定距離走行する毎に出力される走行エンコーダ9のパルス信号をトリガにして、駆動させたい超音波センサに送信/受信選択信号をシフトしたあと、超音波発振信号を出力し、同時に反射波の受信信号を受ける。
【0036】
距離演算部38bは、超音波発振から反射波受信までの時間によりセンサと車体面までの距離を測定し、座標データを作成する。すなわち、超音波センサと水平に車体検出点までの測定距離をX,センサの取付高さをYとして座標データを作成する。
【0037】
制御点検出部38cは、検出された車体検出点の座標データと、上面車形制御部37で検出される車体上面位置とから側面上部ブロワノズル7,7を揺動制御する際に目標とする制御点を設定する。この制御点は、車体側面とルーフ面との境界部からバイザーの装備を想定して下方にオフセットした位置で、且つ各検出点を近似的に結ぶ直線上に仮想される。
【0038】
データ作成部38dは、車体がほぼ左右対称であることを前提に、制御点検出部38cで設定した車体ポイントの逆側面の境界点を仮想する
【0039】
洗車制御部39は、走行位置検出部36で得られる本体フレーム1の走行位置データと、上面車形制御部37で得られる上面車形データと、側面車形制御部381で得られる側面車形データに基づいて洗車駆動部41を制御して前記各ブラシ及びノズルを駆動するものである。
【0040】
続いて、このように構成する本発明の動作について説明する。
洗車利用者が操作ボックスCBにおいて洗車料金を投入し、希望する洗車メニューを選択した後、自動車を乗り入れていく。本体フレーム1の超音波センサ31,33で自動車が所定の停車位置に停車されたことを検出すると、本体フレーム1の往行に伴い車形検出工程とブラッシング洗浄工程が実行される。
車形検出工程は、走行エンコーダ9で本体フレーム1の走行位置を検出しながら上面形状検出装置10及び側面形状検出装置11で自動車の上面形状及び側面形状を認識し、車体上面と車体側面の形状検出が行われ、本体フレーム1の往行が終了すると自動車全体の形状検出が完了する。
ブラッシング洗浄工程は、散水ノズルより洗浄水及び洗剤水を放出しながら、上面ブラシ4が自動車の上面形状に沿って駆動して車体上面のブラッシング洗浄を行い、側面ブラシ5・5が開閉動作により自動車の前面・側面・後面のブラッシング洗浄を行う。
【0041】
次に、本体フレーム1の復行に伴い、再度ブラッシング洗浄工程が実行され、洗浄が終了すると、本体フレーム1の往行に伴う乾燥工程が実行される。
乾燥工程は、上面ブロワノズル6が自動車の上面形状に沿って昇降し、できるだけ車体に近づいた状態で自動車の上面に送風し、側面上部ブロワノズル7・7が自動車の上面形状に応じて左右及び前後の揺動位置を変位させて車体の側面上部に向けて送風し、側面下部ブロワノズル8・8が、車体の側面下部に向けて送風し、洗浄後の車体をブロワ乾燥する。
【0042】
以下、乾燥工程の動作について詳細に説明する。
上面ブロワノズル6からの送風は、主に自動車Aの車体上面に作用し、本体フレーム1の往行によって残留する水滴を車体後方に追いやりながら吹き飛ばしていく。側面上部ブロワノズル7・7の送風は、主に車体側面上部に作用し、残留する水滴を車体下方に追いやりながら吹き飛ばしていく。側面下部ブロワノズル8・8からの送風は、主に車体側面下部に作用し、残留する水滴及び車体上面から流れる水滴を吹き飛ばしていく。
【0043】
さて、側面上部ブロワノズル7・7からの送風は、筒状のノズル体27によってほとんど損失のない状態で車体に吹き付けられ、コアンダ効果により車体面に沿って拡散していき、広域にわたって水滴除去の乾燥力が発揮される。このため、送風が拡散してしまうと、上面ブロワノズル6からの送風と干渉し、打ち消しあった部位に水滴の滞留が発生しやすくなるとともに、乾燥し終えた車体面に水滴を飛散させてしまうことがある。そこで、上面車形制御部37で検出される車体部位に応じて前後揺動装置17及び左右揺動装置32を制御して最適な揺動形態で送風を行うようにしている。
【0044】
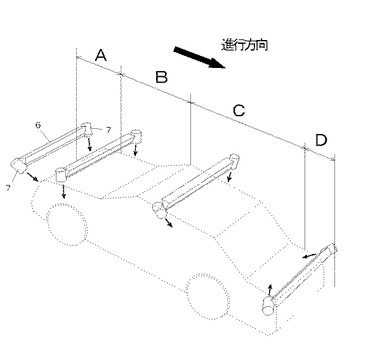
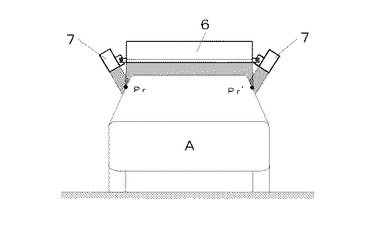
図7は車体部位毎の側面上部ブロワノズル7・7の揺動動作を示している。
エリアA(乾燥開始位置〜車体前端+α)では、左右揺動装置32で左右の側面上部ブロワノズル7・7をそれぞれ最も内向きに指向させた状態(図4c)にするとともに、前後揺動装置17で上面ブロワノズル6を進行方向に傾斜させた状態(図3c)にし、フロントグリルに送風を集中させて乾燥性能を向上させる。
エリアB(車体前端+α〜ルーフ前端)では、左右の側面上部ブロワノズル7・7をそれぞれ傾斜させない状態(図4a)にし、ボンネットやフロントガラスへの水滴の飛散を防止する。
エリアC(ルーフ前端〜ルーフ後端)では、側面車形制御部38で設定した制御点Pr,Pr’に向けて送風するよう、左右の側面上部ブロワノズル7・7の揺動角度が制御される。
エリアD(ルーフ後端〜車体後端)では、左右の側面上部ブロワノズル7・7をそれぞれ最も内向きに指向させた状態(図4c)にするとともに、前後揺動装置17で上面ブロワノズル6を進行方向と逆方向に傾斜させた状態(図3b)にし、車体後面に送風を集中させて乾燥性能を向上させる。
【0045】
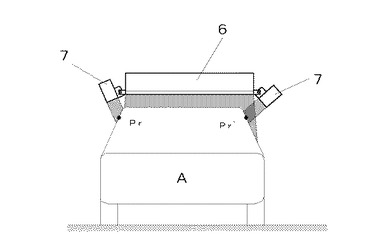
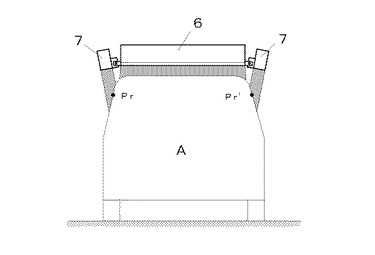
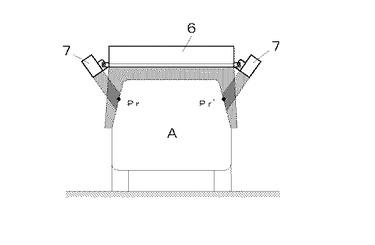
エリアCでの揺動制御は、図8〜11に示すように、側面車形制御部38で設定した制御点Pr,Pr’に指向するように左右の側面上部ブロワノズル7・7を独立して揺動させるもので、正常に停車した普通車(図8)、左右いずれかに片寄って停車した自動車/斜めに停車した普通車(図9)、車体側面上部が緩斜面のワンボックス車(図10)、上面車幅の狭い軽自動車(図11)等であっても、左右それぞれ揺動角度を調整して、制御点Pr,Pr’に合わせて側面上部ブロワノズル7・7を指向させることができる。
【0046】
こうして自動車が乾燥部を抜けると、乾燥工程が終了となる。その後、自動車Aをそのまま前進させて洗車エリアから退場させるよう促し、自動車の退場が検出されると、本体フレーム1をレール後端の待機位置に戻して次の洗車に備える。
【0047】
このように本発明では、上面ブロワノズル6の側面に側面上部ブロワノズル7・7を設けたので、車体側面の窓部に残りやすい水滴を効率良く確実に吹き飛ばすことができる。しかも側面上部ブロワノズル7・7は筒状のノズル体からなるため、損失が少ない状態で車体に吹き付けられ、コアンダ効果により車体に沿って拡散し車体側面に対して広域に作用することで、車体の残滴をきわめて少なくすることができる。また、上面ブロワノズル6を昇降・前後揺動可能にし、側面上部ブロワノズル7・7を左右揺動可能にしたため、車種や車体部位に対応した乾燥形態が可能になる。更に、側面上部ブロワノズル7・7を揺動自在にしているため、車体形状の入り組んだ部分、例えばドアミラー周辺を乾燥する場合に、本体フレームの走行を減速もしくは停止して、側面上部ブロワノズル7・7を揺動させることで更に乾燥効果を高めることができる。
【0048】
尚、本発明は、上記実施例に限定されるものではなく、請求項の記載を逸脱しない範囲で種々の実施態様が考えられる。実施例では本体フレーム1の前寄りに洗浄部を形成し後寄りに乾燥部を形成してあるが、現在広く普及している門型洗車機のように前寄りに乾燥部を設け後寄りに洗浄部を設け、本体の往復走行により洗車動作を行うものに適用できることは勿論である。また、本体フレーム内に自動車を走行させて洗浄する洗車機においても同様に適用できる。更に、実施例の洗浄部Sではブラッシング洗浄を行うが、ブラシを備えず高圧スプレーで洗浄をはかる方式のブラシレス洗車機にも適用可能であることは明らかである。また、側面上部ブロワノズル7・7を単独で前後方向に揺動可能にし、車体の前後面に対して側面上部ブロワノズル7・7だけを指向させたり、車体部位に応じて前後に揺動させるようにしても良い。
【符号の説明】
【0049】
1 本体フレーム
6 上面ブロワノズル
7 側面上部ブロワノズル
10 上面形状検出装置
11 側面形状検出装置
16 昇降装置
17 前後揺動装置
32 左右揺動装置
35 洗車制御ボード
37 上面車形制御部
38 側面車形制御部
40 洗車制御部
41 洗車駆動部
【技術分野】
【0001】
本発明は、自動車車体の乾燥性能を向上する機能を備えた洗車機に関するものである。
【背景技術】
【0002】
従来の洗車機には、主に車体上面の乾燥を図る上面ノズルと、主に車体側面の乾燥を図る側面ノズルを備えた乾燥装置が搭載され、上面ノズルを車体の上面形状に合わせて昇降させ、側面ノズルを車体の側面形状に合わせて開閉させて乾燥効率を向上させるようにしている。これら乾燥ノズルは、相互の送風が干渉しないよう、側面ノズルを車体側面の下部側に配置しているため、ワゴン車などの車高が高い自動車を乾燥する場合、車体側面の上部に側面ノズルからの送風が作用しにくく水滴が残りやすくなるという問題があった。
【0003】
この点、特許文献1では、上面ノズルの長手方向端部に、車体側面上部に臨むサブ乾燥用ノズルを設けている。この構成によれば、ワゴン車のように車高が高い車両を乾燥する場合であっても、車体側面の水滴が確実に除去できるものである。しかしながら、このサブ乾燥用ノズルは、固定式で送風方向は常に一定であるため、車体側面が傾斜している自動車や車幅の狭い自動車には対応しきれない。また、自動車の停車位置は、ドライバーの技量に依存されるため、一方に片寄った状態や斜行した状態で停車されることもあり、均一な乾燥効果を発揮することが困難であった。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2004−237932号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明は、自動車の種類や車体部位に関係なく車体側面の乾燥性能を向上することができる洗車機を提供することを目的とするものである。
【課題を解決するための手段】
【0006】
この課題を解決するため本発明は、門型に形成された本体フレームに、自動車車体の上面に送風する上面乾燥ノズルと、上面乾燥ノズルの両側面に取り付けられ自動車車体の側面上部に送風する側面上部乾燥ノズルと、該上面乾燥ノズルを車体上面形状に沿って昇降する昇降装置と、該側面上部乾燥ノズルを車体側面形状に応じて幅方向に揺動する揺動装置と、自動車の上面形状を検出する上面形状検出装置と、自動車の側面形状を検出する側面形状検出装置と、前記上面形状検出装置及び側面形状検出装置で検出される上面形状及び側面形状に基づいて昇降装置及び揺動装置を制御する洗車制御手段を備えた洗車機であって、該洗車制御手段は、自動車の上面形状から複数の車形基準点を検知し、各車形基準点で区切られた車体部位毎に自動車の上面形状及び側面形状による揺動装置の揺動角度を設定して揺動装置を制御することを特徴とするものである。
【発明の効果】
【0007】
本発明によれば、自動車の種類や車体部位に関係なく車体側面の乾燥性能を向上することができる。
【図面の簡単な説明】
【0008】
【図1】本発明を備えた洗車機を示す平面図である。
【図2】昇降装置16の構成を示す説明図である。
【図3】前後揺動装置17の構成を示す説明図である。
【図4】左右揺動装置32の構成を示す説明図である。
【図5】側面形状検出装置11の構成を示す説明図である。
【図6】制御系を示すブロック図である。
【図7】車体部位毎のブロワノズル7の動作を示す説明図である。
【図8】普通車の乾燥状態を示す説明図である。
【図9】片寄り停車の普通車に対する乾燥状態を示す説明図である。
【図10】ワンボックス車の乾燥状態を示す説明図である。
【図11】軽自動車の乾燥状態を示す説明図である。
【発明を実施するための最良の形態】
【0009】
以下、図面を基に、本発明の実施態様について説明する。
図1は本発明を備えた洗車機を示す平面図である。
1は本体フレームで、門型に形成され、床面に敷設されたレール2・2上を走行モータ3に駆動されて往復走行する。本体フレーム1は、図1に示すように、レール2・2で与えられる走行範囲の後端部に停止し、この位置から洗車を開始する。本体フレーム1には、洗車処理を行う各種の処理装置として、ブラシ装置4・5・5,ブロワノズル6・7・7・8・8をはじめ散水ノズル(図示しない)等が備えられ、走行モータ3の駆動による本体フレーム1の走行に伴って水,洗剤,ワックス等を散布してブラッシングする洗浄作業やブロワノズルより空気を吹き付ける乾燥作業を行う。
【0010】
前記ブラシ装置は、車体上面に沿って昇降し同上面をブラッシングする上面ブラシ装置4と、上面ブラシ装置4の後方に位置し車体に対して接離(開閉)動作し車体の前後面および側面をブラッシングする左右一対の側面ブラシ装置5・5とからなり、本体フレーム1の前側に洗浄部を形成している。
【0011】
前記ブロワノズルは、車体上面に沿って昇降し同上面に空気を吹き付けて乾燥をはかる上面ブロワノズル6と、上面ブロワノズル6の長手方向端部に取り付けられ車体側面上部に空気を吹き付けて乾燥をはかる左右一対の側面上部ブロワノズル7・7と、上面ブロワノズル6より本体フレーム1後方に位置し車体側面に空気を吹き付けて乾燥をはかる左右一対の側面下部ブロワノズル8・8とからなり、本体フレーム1の後側に乾燥部を形成している。
【0012】
9は走行エンコーダで、走行モータ3の出力軸に連係され、本体フレーム1が単位距離走行する毎にパルス出力し、そのパルス信号をカウントすることで本体フレーム1の走行位置を検知する。
【0013】
10は上面形状検出装置で、本体フレーム1内面のブラシ装置より前位置に設けられ、複数の発光素子を上下に配列させた発光部10aと、これに対応して複数の受光素子を上下に配列した受光部10bとを対向させてあり、前記エンコーダ9からのパルス信号に同期して両者間で光信号(赤外光)の授受を行い、これにより洗車する車体の上面位置を検出し、更にこれに伴いボンネット、ウィンドウ、ルーフ、トランクといった自動車の各部位、自動車の車種、突起物の位置と種別等を検出する。
【0014】
11は側面形状検出装置で、本体フレーム1内面の上面形状検出装置10より前位置に設けられ、超音波センサを上下に複数配列させた形状検出部11aと、超音波センサを単体で取り付けた車幅検出部11bとを備え、車体側面に超音波を照射し、車体面で反射して戻ってくるまでの時間から車体側面との距離を測定するとともに、車体側面の傾斜を検出する。
【0015】
CBは操作ボックスで、レール2・2で与えられる本体フレーム1の走行範囲(洗車エリア)に入る手前で自動車の運転席から操作可能な高さに設けられる料金投入と洗車内容の選択入力等の操作を受け付ける。
【0016】
本体フレーム1は、自動車が通り抜け可能なスペースに設置され、レール2・2で与えられる本体フレーム1の走行範囲を洗車エリアとしており、洗車を受ける自動車Aは、操作ボックスCBで洗車受付を行った後、この洗車エリアに前方から進入し、洗車が終了すると洗車エリアの後方へ退場する。すなわち、自動車は前進走行して進入し、洗車後は同じく前進走行して退場するもので、洗車装置利用客(ドライバー)が自動車に乗ったまま洗車を受けて通り抜けるドライブスルー洗車を可能にしている。
【0017】
続いて、図2〜4を用いてブロワノズルのうち、上面ブロワノズル6と側面上部ブロワノズル7の構成について説明する。
上面ブロワノズル6は、側面視漏斗状をなし、上面にダクトホース12が接続される接続筒部13を形成し、下面にスリット状の送風口14を開口し、両側面に支持枠15を連設しており、昇降装置16により上下方向に昇降されるとともに、前後揺動装置17により前後方向に揺動される。
【0018】
昇降装置16は、図2に示すように、上面ブロワノズル6及び側面上部ブロワノズル7を自動車の高さに応じて上下方向に昇降させるための機構で、上面ブロワノズル6の支持枠15の外面に接続される台車18と、本体フレーム1の内側部に立設した昇降レール19と、台車18の上下に連結されるチェーン20と、このチェーン20が懸回される上下スプロケット21U・21Lと、左右の上スプロケット21U・21U同士を連結する回転軸22と、この回転軸を正逆転する昇降モータ23とから構成されている。24U・24Lはリミットスイッチで、それぞれレール19の上下端近傍に備えられ、台車18の昇降限界位置を検出する。25は昇降エンコーダで、回転軸22の一端に連結され、回転軸22の回転方向を検出しながら単位角度回転毎にパルス信号を出力して上面ブロワノズル6の昇降位置を与えている。
【0019】
前後揺動装置17は、図3に示すように、上面ブロワノズル6及び側面上部ブロワノズル7を前後方向に揺動させて風向を切り替えるための機構で、支持枠15と台車18を回転軸26で軸支して揺動自在とし、回転軸26に固定される固定片27にロット部を軸支し、支持枠15の後側下部にシリンダ部を軸支したエアシリンダ28で揺動される。通常、上面ブロワノズル6は、エアシリンダ28のロット部を縮めた状態で、送風口14が垂直下向きに指向した位置にあり(a)、エアシリンダ28に空気を導入しロット部を伸ばすと、回転軸26を中心に回転し、本体フレーム1の前方下向きに所定角度指向した位置に揺動する(b)。
【0020】
側面上部ブロワノズル7・7は、上面ブロワノズル6の両側面における支持枠15で囲まれた空間内に設けられ、下向きに送風口29を開口し、上面にダクトホース30が接続される略筒状のノズル体31からなり、首振り装置32により左右方向に揺動される。
【0021】
ノズル体31は、ダクトホース30からの送風をそのままの勢いで吹き出すもので、車体側面の上部に向けて送風するように、垂直下向きからわずかに内側に傾斜した姿勢で取り付けられている。このノズル体31の送風口29の形状は、円形であればよいが、それ以外にも楕円・多角形・近似円等でも良い。本出願人の実験によれば、短辺/長辺=0.2以上の長方形で囲まれる範囲で開口形状を設定すれば、車体面に対して十分な効果が得られた。
【0022】
左右揺動装置32は、図4に示すように、側面上部ブロワノズル7・7を左右方向に揺動させて送風口29の風向を切り替えるための機構で、ノズル体31の外周面に設けた支持片33の下部を上面ブロワノズル6の側面に軸支して揺動自在とし、支持片33の上部にロット部を軸支し、上面ブロワノズル6の側面上部にシリンダ部を軸支したエアシリンダ34で揺動される。通常、側面上部ブロワノズル7・7は、エアシリンダ34のロット部を縮めた状態で、送風口29が垂直下向きから僅かに内側に指向した位置にあり(a)、エアシリンダ34に空気を導入しロット部を伸ばすことで、支持片33の下部を中心に回転し、本体フレーム1の内向きに角度θ1指向した位置(b)と、更に内向きに角度θ2指向した位置(c)に揺動する。
【0023】
尚、これらブロワノズルは、特に図示しないが、ダクトホース12・30を送風ブロワに接続して高圧風が供給される。送風ブロワは、各ブロワノズル毎に設置しても良いし、分岐風路を介してそれぞれのブロワノズルに分配送風しても良い。また、揺動装置17,32として、本実施例ではエアシリンダを使用し、所定角度単位で段階的に揺動するようにしているが、モータ等を用いて無段階に首振りさせるようにしても良い。
【0024】
このような構成により、上面ブロワノズル6は、昇降装置16によって車体の上面形状に沿って昇降され、車体上面との距離を適正に保持しながらブロワ乾燥を行う。また、前後揺動装置17によって車体の前後面に対して適正な送風角度でブロワ乾燥を行う。側面上部ブロワノズル7・7は、左右揺動装置32によって車体の側面形状に合わせて揺動され、車体側面上部に指向させてブロワ乾燥を行う。また、上面ブロワノズル6の前後揺動装置17によって車体の前後方向へも揺動され、上面ブロワノズル6と協同して車体の前後面に対してブロワ乾燥を行うものである。
【0025】
図5は側面形状検出装置11の構成を示している。
形状検出部11aは、本体フレーム1の一方内面に形成され、自動車の進入を検出する超音波センサ31と、上下等間隔Lに配列した超音波センサ32a〜32dを備えている。車幅検出部11bは、本体フレーム1の他方内面に形成され、形状検出部11aの超音波センサ31と対をなす超音波センサ33を備えている。
【0026】
超音波センサ31・33は、それぞれ本体フレーム1の前面から支持アーム34により前方に突出させた状態で、確実な車体認識と消防法の観点から地上高60cmを目安に取り付けられ、入車待機中においてセンサ31を送信用・センサ33を受信用(むろんその逆でもよい)として使用することで透過型検出器として機能させ、自動車が進入してきたことを検出する。また、洗車中において各センサ31・33を反射型検出器として機能させ、車体側面に超音波を送受して車体側面との距離を測定し、自動車の車幅と形状を検出する。
【0027】
超音波センサ32a〜32dは、本体フレーム1の内面に適宜間隔をあけて配列され、車体側面に超音波を送受して車体側面との距離を測定し、各センサでの車体検出点を直線で結んで側面輪郭を検出する。超音波センサ32aは、超音波センサ31から間隔L上部に位置し、普通車のドアと窓の切替付近に超音波を照射し、超音波センサ32bは、超音波センサ32aから間隔L上部に位置し、普通車の窓に超音波を照射し、超音波センサ32cは、超音波センサ32bから間隔L上部に位置し、普通車の窓とルーフの切替付近でワゴン車の窓付近に超音波を照射し、超音波センサ32dは、超音波センサ32cから間隔L上部に位置し、ワゴン車の窓とルーフの切替付近に超音波を照射する。
【0028】
これにより、超音波センサ31を最下位・超音波センサ32dを最上位として車体検出点が測定され、各検出点の座標データに基づいて直線化し車体側面形状を検出するものである。
【0029】
図6は制御系を示すブロック図である。
35は洗車制御ボードで、走行位置検出部36・上面車形制御部37・側面車形制御部38・洗車制御部39を備え、走行エンコーダ9から得た情報に基づき、自動車の位置,形状,装備等の車形データを認識するとともに、この車形データに基づいて洗車駆動ボード40を介してブラシ,ブロワノズル等の洗車処理装置を作動させ、自動車の位置,形状,装備等に合わせて洗車を行うものである。
【0030】
走行位置検出部36は、走行エンコーダ9から発信されるパルス信号をカウントして本体フレーム1の走行位置を検出する。
【0031】
上面車形制御部37は、車形検出部37a・画像処理部37b・基準点認識部37c・車種判別部37dを備えている。
車形検出部37aは、本体フレーム1の走行に伴う走行エンコーダ9からのパルス信号をトリガにして上面形状検出装置10の透光/遮光データを取り込み、走行位置検出部36で与える本体フレーム1の走行位置と対応させて2値画像データを作成する。こうして作成される2値画像データは、横軸を洗車機本体1及び台車11の所定走行ピッチ、縦軸を光軸の配列ピッチとした画素をマトリックス状に展開し、透光の場合は白、遮光の場合は黒として表現される。
【0032】
画像処理部37bは、車形検出部37aで作成した2値画像データを画像処理して自動車の上面輪郭を抽出する。画像処理は、2値画像データのすべての画素に対して所定条件の論理フィルターをかけ、隣接する画素パターンよって検出画素の2値データを変更し、縦方向での透光画素と遮光画素の境界画素を車体上面位置として横方向に連続した自動車の上面輪郭を抽出する。
【0033】
基準点認識部37cは、上面輪郭に基づき自動車の基準点となる車体前端・ボンネットとフロントガラスの境界・ルーフ前端・ルーフ後端・車体後端を認識する。すなわち、車体前端は、上面レベルが予め設定された車体下限高さを越えた点を検出して認識される。ボンネットとフロントガラスの境界は、上面レベルが予め設定されたルーフ下限高さに達するまでの間で、且つ車体前端から所定距離離れたことを条件に、本体フレーム1が所定距離走行する間に上面レベルが所定値以上上昇した点を検出して認識される。尚、ワンボックス車においては、ボンネットがないため、この条件を満たす部位ができないので、上面レベルがルーフ下限高さに達した点で境界の認識を諦めて、次の基準点の認識に移行する。ルーフ前端は、上面レベルが予め設定されたルーフ下限高さ以上にあることを条件に、本体フレームが所定距離走行する間に上面レベルが所定値以上上昇しなくなった点を検出して認識される。ルーフ後端は、上面レベルがルーフ前端の高さから所定値以上下降した点を検出して認識される。車体後端は、上面レベルが車体下限高さを下回った点を検出して認識される。
【0034】
車種判別部37dは、基準点認識部37cで認識した自動車の基準点から洗浄する自動車の車種を判別する。すなわち、ボンネットとフロントガラスの境界があれば普通車、無ければワンボックス車を判別する。
【0035】
側面車形制御部38は、センサ駆動部38a・距離演算部38b・制御点検出部38c・データ作成部38dを備えている。
センサ駆動部38aは、本体フレーム1が所定距離走行する毎に出力される走行エンコーダ9のパルス信号をトリガにして、駆動させたい超音波センサに送信/受信選択信号をシフトしたあと、超音波発振信号を出力し、同時に反射波の受信信号を受ける。
【0036】
距離演算部38bは、超音波発振から反射波受信までの時間によりセンサと車体面までの距離を測定し、座標データを作成する。すなわち、超音波センサと水平に車体検出点までの測定距離をX,センサの取付高さをYとして座標データを作成する。
【0037】
制御点検出部38cは、検出された車体検出点の座標データと、上面車形制御部37で検出される車体上面位置とから側面上部ブロワノズル7,7を揺動制御する際に目標とする制御点を設定する。この制御点は、車体側面とルーフ面との境界部からバイザーの装備を想定して下方にオフセットした位置で、且つ各検出点を近似的に結ぶ直線上に仮想される。
【0038】
データ作成部38dは、車体がほぼ左右対称であることを前提に、制御点検出部38cで設定した車体ポイントの逆側面の境界点を仮想する
【0039】
洗車制御部39は、走行位置検出部36で得られる本体フレーム1の走行位置データと、上面車形制御部37で得られる上面車形データと、側面車形制御部381で得られる側面車形データに基づいて洗車駆動部41を制御して前記各ブラシ及びノズルを駆動するものである。
【0040】
続いて、このように構成する本発明の動作について説明する。
洗車利用者が操作ボックスCBにおいて洗車料金を投入し、希望する洗車メニューを選択した後、自動車を乗り入れていく。本体フレーム1の超音波センサ31,33で自動車が所定の停車位置に停車されたことを検出すると、本体フレーム1の往行に伴い車形検出工程とブラッシング洗浄工程が実行される。
車形検出工程は、走行エンコーダ9で本体フレーム1の走行位置を検出しながら上面形状検出装置10及び側面形状検出装置11で自動車の上面形状及び側面形状を認識し、車体上面と車体側面の形状検出が行われ、本体フレーム1の往行が終了すると自動車全体の形状検出が完了する。
ブラッシング洗浄工程は、散水ノズルより洗浄水及び洗剤水を放出しながら、上面ブラシ4が自動車の上面形状に沿って駆動して車体上面のブラッシング洗浄を行い、側面ブラシ5・5が開閉動作により自動車の前面・側面・後面のブラッシング洗浄を行う。
【0041】
次に、本体フレーム1の復行に伴い、再度ブラッシング洗浄工程が実行され、洗浄が終了すると、本体フレーム1の往行に伴う乾燥工程が実行される。
乾燥工程は、上面ブロワノズル6が自動車の上面形状に沿って昇降し、できるだけ車体に近づいた状態で自動車の上面に送風し、側面上部ブロワノズル7・7が自動車の上面形状に応じて左右及び前後の揺動位置を変位させて車体の側面上部に向けて送風し、側面下部ブロワノズル8・8が、車体の側面下部に向けて送風し、洗浄後の車体をブロワ乾燥する。
【0042】
以下、乾燥工程の動作について詳細に説明する。
上面ブロワノズル6からの送風は、主に自動車Aの車体上面に作用し、本体フレーム1の往行によって残留する水滴を車体後方に追いやりながら吹き飛ばしていく。側面上部ブロワノズル7・7の送風は、主に車体側面上部に作用し、残留する水滴を車体下方に追いやりながら吹き飛ばしていく。側面下部ブロワノズル8・8からの送風は、主に車体側面下部に作用し、残留する水滴及び車体上面から流れる水滴を吹き飛ばしていく。
【0043】
さて、側面上部ブロワノズル7・7からの送風は、筒状のノズル体27によってほとんど損失のない状態で車体に吹き付けられ、コアンダ効果により車体面に沿って拡散していき、広域にわたって水滴除去の乾燥力が発揮される。このため、送風が拡散してしまうと、上面ブロワノズル6からの送風と干渉し、打ち消しあった部位に水滴の滞留が発生しやすくなるとともに、乾燥し終えた車体面に水滴を飛散させてしまうことがある。そこで、上面車形制御部37で検出される車体部位に応じて前後揺動装置17及び左右揺動装置32を制御して最適な揺動形態で送風を行うようにしている。
【0044】
図7は車体部位毎の側面上部ブロワノズル7・7の揺動動作を示している。
エリアA(乾燥開始位置〜車体前端+α)では、左右揺動装置32で左右の側面上部ブロワノズル7・7をそれぞれ最も内向きに指向させた状態(図4c)にするとともに、前後揺動装置17で上面ブロワノズル6を進行方向に傾斜させた状態(図3c)にし、フロントグリルに送風を集中させて乾燥性能を向上させる。
エリアB(車体前端+α〜ルーフ前端)では、左右の側面上部ブロワノズル7・7をそれぞれ傾斜させない状態(図4a)にし、ボンネットやフロントガラスへの水滴の飛散を防止する。
エリアC(ルーフ前端〜ルーフ後端)では、側面車形制御部38で設定した制御点Pr,Pr’に向けて送風するよう、左右の側面上部ブロワノズル7・7の揺動角度が制御される。
エリアD(ルーフ後端〜車体後端)では、左右の側面上部ブロワノズル7・7をそれぞれ最も内向きに指向させた状態(図4c)にするとともに、前後揺動装置17で上面ブロワノズル6を進行方向と逆方向に傾斜させた状態(図3b)にし、車体後面に送風を集中させて乾燥性能を向上させる。
【0045】
エリアCでの揺動制御は、図8〜11に示すように、側面車形制御部38で設定した制御点Pr,Pr’に指向するように左右の側面上部ブロワノズル7・7を独立して揺動させるもので、正常に停車した普通車(図8)、左右いずれかに片寄って停車した自動車/斜めに停車した普通車(図9)、車体側面上部が緩斜面のワンボックス車(図10)、上面車幅の狭い軽自動車(図11)等であっても、左右それぞれ揺動角度を調整して、制御点Pr,Pr’に合わせて側面上部ブロワノズル7・7を指向させることができる。
【0046】
こうして自動車が乾燥部を抜けると、乾燥工程が終了となる。その後、自動車Aをそのまま前進させて洗車エリアから退場させるよう促し、自動車の退場が検出されると、本体フレーム1をレール後端の待機位置に戻して次の洗車に備える。
【0047】
このように本発明では、上面ブロワノズル6の側面に側面上部ブロワノズル7・7を設けたので、車体側面の窓部に残りやすい水滴を効率良く確実に吹き飛ばすことができる。しかも側面上部ブロワノズル7・7は筒状のノズル体からなるため、損失が少ない状態で車体に吹き付けられ、コアンダ効果により車体に沿って拡散し車体側面に対して広域に作用することで、車体の残滴をきわめて少なくすることができる。また、上面ブロワノズル6を昇降・前後揺動可能にし、側面上部ブロワノズル7・7を左右揺動可能にしたため、車種や車体部位に対応した乾燥形態が可能になる。更に、側面上部ブロワノズル7・7を揺動自在にしているため、車体形状の入り組んだ部分、例えばドアミラー周辺を乾燥する場合に、本体フレームの走行を減速もしくは停止して、側面上部ブロワノズル7・7を揺動させることで更に乾燥効果を高めることができる。
【0048】
尚、本発明は、上記実施例に限定されるものではなく、請求項の記載を逸脱しない範囲で種々の実施態様が考えられる。実施例では本体フレーム1の前寄りに洗浄部を形成し後寄りに乾燥部を形成してあるが、現在広く普及している門型洗車機のように前寄りに乾燥部を設け後寄りに洗浄部を設け、本体の往復走行により洗車動作を行うものに適用できることは勿論である。また、本体フレーム内に自動車を走行させて洗浄する洗車機においても同様に適用できる。更に、実施例の洗浄部Sではブラッシング洗浄を行うが、ブラシを備えず高圧スプレーで洗浄をはかる方式のブラシレス洗車機にも適用可能であることは明らかである。また、側面上部ブロワノズル7・7を単独で前後方向に揺動可能にし、車体の前後面に対して側面上部ブロワノズル7・7だけを指向させたり、車体部位に応じて前後に揺動させるようにしても良い。
【符号の説明】
【0049】
1 本体フレーム
6 上面ブロワノズル
7 側面上部ブロワノズル
10 上面形状検出装置
11 側面形状検出装置
16 昇降装置
17 前後揺動装置
32 左右揺動装置
35 洗車制御ボード
37 上面車形制御部
38 側面車形制御部
40 洗車制御部
41 洗車駆動部
【特許請求の範囲】
【請求項1】
門型に形成された本体フレームに、自動車車体の上面に送風する上面乾燥ノズルと、前記上面乾燥ノズルの両側面に取り付けられ自動車車体の側面上部に送風する側面上部乾燥ノズルと、該上面乾燥ノズルを車体上面形状に沿って昇降する昇降装置と、該側面上部乾燥ノズルを車体側面形状に応じて幅方向に揺動する揺動装置と、自動車の上面形状を検出する上面形状検出装置と、自動車の側面形状を検出する側面形状検出装置と、前記上面形状検出装置及び側面形状検出装置で検出される上面形状及び側面形状に基づいて前記昇降装置及び揺動装置を制御する洗車制御手段を備えた洗車機であって、
該洗車制御手段は、自動車の上面形状から複数の車形基準点を検知し、各車形基準点で区切られた車体部位毎に自動車の上面形状及び側面形状による前記揺動装置の揺動角度を設定して前記揺動装置を制御することを特徴とする洗車機。
【請求項1】
門型に形成された本体フレームに、自動車車体の上面に送風する上面乾燥ノズルと、前記上面乾燥ノズルの両側面に取り付けられ自動車車体の側面上部に送風する側面上部乾燥ノズルと、該上面乾燥ノズルを車体上面形状に沿って昇降する昇降装置と、該側面上部乾燥ノズルを車体側面形状に応じて幅方向に揺動する揺動装置と、自動車の上面形状を検出する上面形状検出装置と、自動車の側面形状を検出する側面形状検出装置と、前記上面形状検出装置及び側面形状検出装置で検出される上面形状及び側面形状に基づいて前記昇降装置及び揺動装置を制御する洗車制御手段を備えた洗車機であって、
該洗車制御手段は、自動車の上面形状から複数の車形基準点を検知し、各車形基準点で区切られた車体部位毎に自動車の上面形状及び側面形状による前記揺動装置の揺動角度を設定して前記揺動装置を制御することを特徴とする洗車機。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2013−103568(P2013−103568A)
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願番号】特願2011−247786(P2011−247786)
【出願日】平成23年11月11日(2011.11.11)
【出願人】(000103138)エムケー精工株式会社 (174)
【Fターム(参考)】
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願日】平成23年11月11日(2011.11.11)
【出願人】(000103138)エムケー精工株式会社 (174)
【Fターム(参考)】
[ Back to top ]