
海底鉱床の採鉱方法およびその採鉱ユニット
【課題】大深海に存在する海底鉱床を容易且つ確実に採鉱、集鉱が可能である作業効率のよい海底鉱床の採鉱方法およびそのユニットを提供する。
【解決手段】左右一対のクローラが備えられている本体フレームの先方に備えられた少なくとも上下に揺動可能な取付けブームに海底鉱床を掘削する掘削装置および掘削装置により掘削されて海底に散在する鉱砕を集鉱する集鉱装置がそれぞれ交換可能に取り付け可能な採鉱機を採鉱母船に積載して採掘現場に停泊し、掘削装置を装着した状態の採掘機を海底の採鉱位置に沈降、着底させて、掘削装置により海底鉱床を掘削して所定量の砕鉱を形成した後、採鉱機を採鉱母船に引き上げて掘削装置を集鉱装置に交換して再び海底の砕鉱堆積位置に沈降、着底させて掘削して形成した砕鉱を集鉱装置により集鉱して海底に設置した水中ポンプを介して採鉱母船上に搬送する。
【解決手段】左右一対のクローラが備えられている本体フレームの先方に備えられた少なくとも上下に揺動可能な取付けブームに海底鉱床を掘削する掘削装置および掘削装置により掘削されて海底に散在する鉱砕を集鉱する集鉱装置がそれぞれ交換可能に取り付け可能な採鉱機を採鉱母船に積載して採掘現場に停泊し、掘削装置を装着した状態の採掘機を海底の採鉱位置に沈降、着底させて、掘削装置により海底鉱床を掘削して所定量の砕鉱を形成した後、採鉱機を採鉱母船に引き上げて掘削装置を集鉱装置に交換して再び海底の砕鉱堆積位置に沈降、着底させて掘削して形成した砕鉱を集鉱装置により集鉱して海底に設置した水中ポンプを介して採鉱母船上に搬送する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、海底、特に深海に存在する鉱床の採鉱方法およびその採鉱ユニットに関するものである。
【背景技術】
【0002】
近頃、水深1000mを超える大深海の海底に金、銅、鉛、亜鉛、ニッケル、コバルト、白金その他レアメタル、レアアースなどのメタル資源を有する海底鉱床が多数存在することが各種の探査により確認されている。
【0003】
ところで、前記海底鉱床の資源を利用するには海底鉱床を破砕して採鉱する手段が必要であり、従来から例えば特開平7−217361号公報や特開2004−143741号公報に提示されているように船から掻き取り機を沈降させたり岩盤破砕用爪を落下させたりする手段が知られているが、殆どが比較的浅い海域での使用を前提としたものやサンプリングに関するものであり、実際に採鉱する技術については開示されていない。
【0004】
また、直接、海底に沈降させて海底の岩盤を掘削する海底掘削機が特開昭63−130829号公報に提示されているが、この公報に提示されている海底掘削機は、平面が矩形状の枠体の四隅に伸縮脚を設けた本体フレームと同様な移動フレームとを長手方向に直交する方向に移動可能にスライダーにより支持するとともに、本体フレームの先方に切削ドラムであるロードヘッタと下方にドラムカッターを備えたものである。
【0005】
従って、海底や海底鉱床上を自由に且つ迅速に走行して効率よく採鉱をすることができず、海底に凹凸があったり、傾斜している場合には本体フレームおよび移動フレームの四隅に配置した伸縮脚におけるそれぞれの長さを調節しないと移動することができないという問題があり、特に、海底鉱床にあっては資源が山形に堆積していることから傾斜面を登坂した状態で掘削する必要があり使用することが困難である。
【0006】
また、前記従来の海底採鉱機は比較的浅い海底土木の目的で岩盤を切削するためのものであり、例えばマンガン団塊やコバルトクラフトのように3000mを越える大深海において使用するには着底や切削操作に困難な面が多い、という問題がある。
【0007】
更に、前記従来の海底掘削機は、掘削した砕鉱を集鉱するための装置が必要であり、そのため、掘削機とは別の集鉱機を必要とすることから大型の採鉱母船が必要であり、設備費や運航費が嵩むという問題がある。これらの問題点を解消するために特開昭63−130829号公報には集鉱機を併設した海底掘削機も提案されているが、海底掘削機が全体として重量が増して海底の移動などにおいて機能的でないばかりか複雑な構成となり保守や整備が困難であり、また、併設したものは掘削機が主であり、集鉱機の部分が従となり性能的にも十分とはいえない。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開平7−217361号公報
【特許文献2】特開2004−143741号公報
【特許文献3】特開昭63−130829号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
本発明は、上記のような問題を解決しようとするものであり、大深海に存在する海底鉱床を容易且つ確実に採鉱、集鉱が可能である作業効率のよい海底鉱床の採鉱方法およびそのユニットを提供することを課題とする。
【課題を解決するための手段】
【0010】
前記課題を解決するためになされた本発明である海底鉱床の採鉱方法は、左右一対のクローラが備えられている本体フレームの先方に備えられた少なくとも上下に揺動可能な取付けブームに海底鉱床を掘削する掘削装置および前記掘削装置により掘削されて海底に散在する鉱砕を集鉱する集鉱装置がそれぞれ交換可能に取り付け可能な採鉱機を採鉱母船に積載して採掘現場に停泊し、前記掘削装置を装着した状態の前記採掘機を海底の採鉱位置に沈降、着底させて、前記掘削装置により海底鉱床を掘削して所定量の砕鉱を形成した後、前記採鉱機を採鉱母船に引き上げて掘削装置を集鉱装置に交換して再び海底の前記砕鉱堆積位置に沈降、着底させて前記掘削して形成した砕鉱を前記集鉱装置により集鉱して海底に設置した水中ポンプを介して前記採鉱母船上に搬送することを特徴とする。
【0011】
本発明によれば、採掘現場に停泊させた採鉱母船から積載している採掘機に掘削装置を装着した状態で海底における所定の採鉱位置に着底させ、採掘機をクローラにより自走させることにより海底鉱床を掘削し、所定の掘削が終了した後、採掘機を採鉱母船に引き上げ、採掘機に集鉱装置を装着した状態で海底における前記掘削鉱位置に着底させて集鉱して採鉱母船に搬送することにより、一台の採鉱機を使って、効率よく採鉱作業を行うことができる。
【0012】
また、本発明において、前記採鉱機を採鉱母船から海底における所定位置に着底させる際に、前記採鉱機に搭載した水中位置測位装置、ファインダーテレビ付き深海カメラからの信号により採鉱機の位置を採鉱母船上で確認しながら採鉱機に付設してあるスラスターにより位置を調整しながら下降させることにより、暗視野状態で潮流などがある大深海であっても容易に且つ簡単に計画した所定の現場に着底させることができる。
【0013】
更に、海底の採鉱位置や集鉱位置およびその周辺の情報を前記採鉱機に搭載した水中位置測位装置、ファインダーテレビ付き深海カメラ、ソナー画像により採鉱母船上に送信し、船上で確認して後に採鉱機を着底させることにより確実に計画した所定位置に採鉱機を着底させることができる。
【0014】
更にまた、前記海底の所定位置に着底後に、前記採鉱機に搭載した水中位置測位装置、ファインダーテレビ付き深海カメラ、ソナー画像により前記採鉱機のクローラおよび切削ドラムなどの駆動機構についての異常を採鉱母船上で確認することにより、即座に対応することができ、無駄な時間と作業を省くことができる。
【0015】
加えて、前記海底の採鉱位置に着底後に、前記採鉱機に搭載した水中位置測位装置、ファインダーテレビ付き深海カメラ、ソナーからの画像により船上において移動距離および移動ルートを確認しながら前記採鉱機を走行させて所定の採鉱位置に移動させることができ、前記海底の所定位置に着底後に、前記採鉱機に搭載したファインダーテレビ付き深海カメラ、ソナーからの画像により船上において前記採鉱機の位置、姿勢などを確認しながら前記クローラおよび切削ドラムなどを遠隔駆動させることにより暗視の大深海においても容易且つ確実に海底鉱床を採鉱、集鉱をすることができる。
【発明の効果】
【0016】
本発明によれば、大深海に存在する海底鉱床を容易且つ確実に採鉱、集鉱することが可能であり、採鉱母船からの採鉱機の昇降や海底での作業効率を向上させて、きわめて効率のよい採鉱、集鉱をすることができる。
【図面の簡単な説明】
【0017】
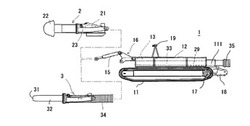
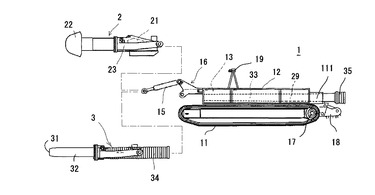
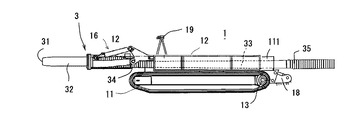
【図1】本発明に使用する採鉱機についての好ましい実施の形態を示す分解した状態の側面図である。
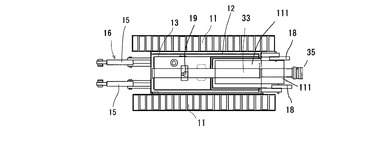
【図2】図1に示した実施の形態における採鉱機についての本体を示す平面図である。
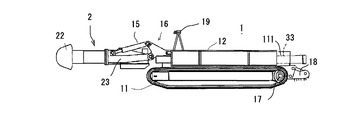
【図3】図1に示した採鉱機についての実施の形態における掘削装置を装着した状態の側面図である。
【図4】図1に示した採鉱機についての実施の形態における集鉱装置を装着した状態の側面図である。
【図5】図3に示した実施の形態における採鉱機を用いた使用状態を示す説明図である。
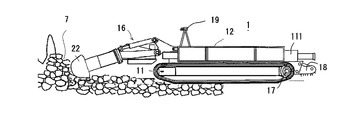
【図6】図3に示した実施の形態における採鉱機を用いた使用状態を示す説明図である。
【図7】図3に示した実施の形態における採鉱機を用いた使用状態を示す拡大説明図である。
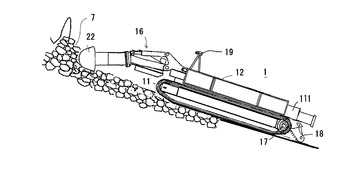
【図8】図3に示した実施の形態における採鉱機を用いた異なる使用状態を示す拡大説明図である。
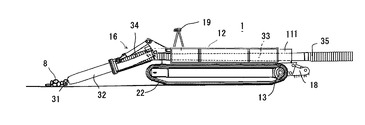
【図9】図4に示した実施の形態における採鉱機を用いた使用状態を示す説明図である。
【図10】図4に示した実施の形態における採鉱機を用いた異なる使用状態を示す拡大説明図である。
【発明を実施するための形態】
【0018】
以下に、本発明を図面に示す実施の形態に基づいて詳細に説明する。
【0019】
図1は本発明である海底鉱床の採鉱方法を実施するために用いられる採鉱ユニットに用いられる採鉱機1の好ましい実施の形態を示すものであり、採鉱機1は、左右一対のクローラ11が備えられている本体フレーム12に前後方向へスライド可能なスライドブーム13が配置されているとともに、このスライドブーム13の先方に伸縮シリンダ15,15により上下に揺動可能な取付けブーム16が配置されている。
【0020】
前記クローラ11,11は陸上で使用されるものと変わりないが高圧の海水中でも作動が可能なものであり、例えば後方の駆動輪17に配置したモータや減速機などの本体フレーム12に搭載される駆動手段(図示せず)により走行するものであり、本実施の形態では船上から例えばアンピリカルケーブル(図示せず)などを用い有線により運転される。
【0021】
そして、前記取付けブーム16には海底鉱床を掘削するために用いられる掘削装置2と、掘削装置2により掘削されて海底に散在する鉱砕を集鉱する集鉱装置3が交換可能に取り付けられる。
【0022】
本実施の形態では掘削装置2は、後部にたとえば油圧モータのような回転駆動部21を内蔵するとともに先端に前記回転駆動部21により回転する周囲に複数の掘削ビット(図示せず)を突設させた掘削ドラム22を備えた構成であり、後部に備えた取付部23において前記取付けブーム16に取り外し可能に装着される。
【0023】
また、前記集鉱装置3は、前記取付けブーム16に取り外し可能に装着される先端に吸込口31を形成した集鉱ノズル32と、本体フレーム12の前後にわたって配置される集鉱管33と、前記集鉱ノズル32と集鉱管33とを繋ぐフレキシブル管34と、前記集鉱管33の後端に接続されて後述する海底の所定位置に設置された水中ポンプの吸い込み口
に接続される移送ホース35とから構成される。
【0024】
更に、本実施の形態では、本体フレーム12に、採掘機1が深海の高圧下においても正常に走行できるようにするためや掘削ドラム22により掘削時に記採掘機1が安定した姿勢を保つことができるようにするためにカウンターウェイト111を後方に配置しており、また、海底や海底鉱床において安定した状態を保つように、アウトリガー18が設置されている。
【0025】
更にまた、本実施の形態では、採掘機1には水中位置測定装置、ソナー、スラスター、(図示せず)並びにファィンダーテレビ付き深海カメラ(FDC)19等が設置されている。
【0026】
次に、前記海底鉱床の採鉱ユニットを用いた本発明である海底鉱床の採鉱方法について説明する。
【0027】
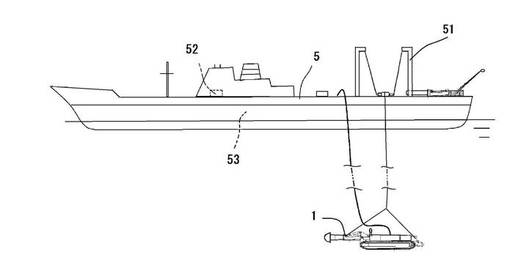
図5乃至図10は前記図1乃至図4に示した採鉱機1を用いた本発明である海底鉱床の採鉱方法についての実施の形態の一例を示すものであり、本発明である海底鉱床の採鉱ユニットは、主として前記採鉱機1と海底の所定位置に配置される水中ポンプ4とこれらおよびこれらの付属機器や機材(図示せず)を積載して海底鉱床の現場に搬送する採鉱母船5とからなり、特に、採鉱母船5は、前記採鉱機1や水中ポンプ4などの各機器を海底に昇降させる昇降機51、海底に着底させる前記各機器を遠隔操作するための各種のセンサーや制御部52、更には、海底から搬送される海底鉱床から採鉱した砕鉱を積載する積載庫53などを有している。
【0028】
そして、始めに、図5に示すように、採鉱機1などの機器などを採鉱母船5に積載して採鉱現場の海域に搬送し、採鉱機1などを船上に備えた昇降機51を用いて予め調査しておいた海底の所定の位置に着底させる。
【0029】
このとき、本実施の形態では、最初に採鉱機1に掘削装置2を装着した状態として昇降機51によりワイヤーなどで吊下げて海底に着底させることになるが、鉱床のある海底までは数千メートルもあるのが通常であり、海上は風や波浪があったりするので採鉱母船5は海上の所定位置にピンポイントに停泊している訳にはいかず、海中では潮流もあり吊り下げられた機器が浮遊状態になるので深海における海底の所定位置に着底させるのはきわめて困難な作業となる。
【0030】
そこで、本実施の形態では、採鉱機1に搭載した水中位置測位装置、スラスターおよびファインダーテレビ付き深海カメラ19を用いて採鉱機1の位置を採鉱母船5上で確認しながら海底6に沈降させることにより、予め測定してある所定の採鉱位置に確実に沈降させることができる。
【0031】
具体的には、例えば潮流の影響により所定の着底地点に対して水平方向への変位が生じた場合には採鉱母船5を操舵して位置を修正し、潮流などにより採鉱機1自身が回転したりした場合には採鉱機1に搭載している水準器や方位径で確認してスラスター(図示せず)により正位に修正する。尚、採鉱機1の機構ならびに搭載機器の操作などは全て採鉱母船5に設置された制御装置52により基本的に有線により遠隔制御される(以下同様)。
【0032】
そして、本実施の形態では、海底近くまで沈降させた採鉱機1を着底させる前に、採鉱機1に搭載した水中位置測位装置からの位置情報、およびファインダーテレビ付き深海カメラ19やソナーからの画像を採鉱母船5における制御装置4の制御監視モニタ(図示せず)により視認して所定の位置であることと着底に支障のないことを確認した後に着底さ
せる。
【0033】
従って、安全に着底が行われるので採鉱機1などの機器が損傷する心配がなく、また、着底地点の情報を入手できることからその後の作業か無駄なく迅速且つ確実に行うことができる。
【0034】
さらに、本実施の形態では着底後に、掘削ドラム22やクローラ11,11の動作などを確認して着底時の衝撃力や水圧などによる影響がないことを確認する。これらの確認については各機器に各種のセンサーなどを設置しておき、それらからの検知信号を採鉱母船5上の制御装置52により確認することができる(図示せず)。殊に、本実施の形態では採鉱機1はファインダーテレビ付き深海カメラ19やソナーなどを搭載しているので、これらの機器を採鉱機1の周囲だけでなく採鉱機1自身の機器についても映像が得られる位置に設置し、或いは自身の機器の映像が得られるものを別に搭載することにより、主要機材に以上がないことを採鉱母船5の制御装置51に送信して画像で確認することによりクローラ11,11および切削ドラム22などの駆動機構についての異常を確認することができる。
【0035】
このようにして着底した採鉱機1は、クローラ11,11を駆動して海底を走行させて所定の海底鉱床に向けて走行、移動させる。このとき、本実施の形態では、採鉱機1に搭載した水中位置測位装置や方位計からの検知信号、ファインダーテレビ付き深海カメラ19、ソナーからの画像を採鉱母船5における制御装置52制御監視モニタ(図示せず)により視認して船上において移動距離および移動ルートを確認しながら走行させて所定の採鉱位置に確実に且つ迅速に移動させることができる。勿論、前記水中位置測位装置、ファインダーテレビ付き深海カメラ19、ソナーからの採鉱機1の前方の情報を確認しながら行うことにより障害箇所をさけて目的箇所へ移動させることができる。
【0036】
本実施の形態では採鉱機1の走行手段としてクローラ11、11を用いているので海底に凹凸があったり傾斜面であっても支障なく迅速に且つ方向を問わずに走行可能であり、また所定の採鉱箇所で確実に停止させることができる。
【0037】
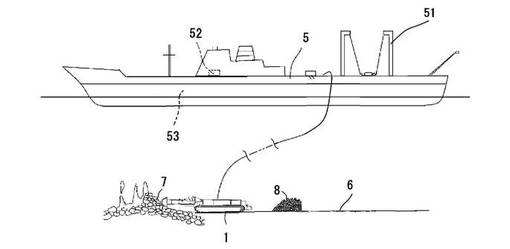
以上の手順で、図6に示すように海底鉱床7の所定の採鉱位置に採鉱機1が配置され、図7に示すように、海底鉱床7を海底鉱床採鉱機1の先端に備えた掘削装置2の掘削ドラム22により採鉱して鉱砕8にする。
【0038】
このとき、本実施の形態では、採鉱機1に搭載したファインダーテレビ付き深海カメラ19、ソナーからの画像により採鉱母船5における制御装置52の制御監視モニタにおいて前記採鉱機の位置、姿勢などを確認しながらクローラ11,11および切削ドラム22などを遠隔駆動させて掘削を行う。殊に、図8に示すように、海底鉱床7が上りの急傾斜地である場合には状況に応じてアウトリガー18を用いて滑り落ちる心配なく安定姿勢により掘削を行うことができる。
【0039】
殊に、本実施の形態では本体フレーム12の後方にカウンターウェイト111を搭載しているので高圧下の深海でも浮力や潮流の影響をなくして確実に海底6を走行させることができる。
【0040】
このようにして海底鉱床7を掘削して鉱砕8を形成し、これをクローラ11,11により整地しながら採鉱機1を進行する。掘削作業は、予め計画した所定の採掘量もしくは掘削る時間が経過したら停止し、前記採鉱機1を海底に降ろしたときと逆の手順により採鉱母船5に引き上げる。
【0041】
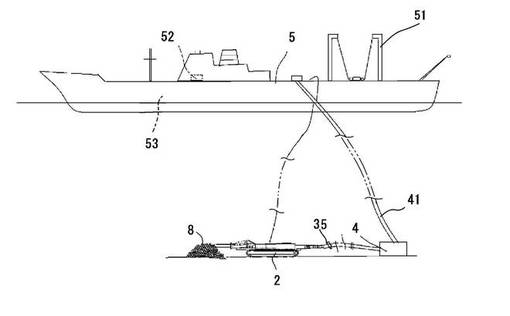
次に、前記採鉱母船5に引き上げた採鉱機1の掘削装置2をブーム16から取り外し、代わりに前記図4に示したように集鉱装置3を取り付けて、前記図5に示した掘削装置2を装着した場合と同様の手順により前記海底の掘削現場に沈降させて着底させる。
【0042】
そして、図9に示すように、採鉱機1に搭載されている集鉱管33の後端が移送ホース35を介して海底6に設置された水中ポンプ4に接続され、更に水中ポンプ4の排出口と採鉱母船5との間にフレキシブルライザー41が連結される。
【0043】
そして、図10に示すように、前記掘削装置2を装着した状態の採鉱機1で海底鉱床を掘削して形成した鉱砕8を集鉱して採鉱母船5へ搬送することにより短時間で効率よく海底資源を採取することができる。
【0044】
更に詳しく説明すると、本実施の形態では、採鉱機1は前記掘削装置2を取り付けた採鉱機1により掘削して形成した鉱砕8を集鉱ノズル32の先端に形成される吸込口31から吸い込み、集鉱ノズル32の後端に接続したフレキシブル管34を介して本体フレーム12に設置された集鉱管33の後端に接続した移送ホース35を介して水中ポンプ4に搬送され、更に、フレキシブルライザー41により採鉱母船5に搬送され、採鉱母船5に設置された積載庫53に積載される。
【0045】
そして、所定の採鉱作業が終了したら、採鉱機1を採鉱母船5に引き上げて帰港し、採取した海底鉱材を荷揚げする。
【0046】
このように、本実施の形態によれば、一台の採鉱機1により掘削および掘削した砕鉱を集鉱することができるので、設備の点で有利であるばかりか、採鉱母船5に採鉱機と集鉱機を積載する必要がなく、小型の採鉱母船5により作業を行うことができ、機動性に富むとともに経済的でも有利である。
【符号の説明】
【0047】
1 採鉱機、2 掘削装置、3 集鉱装置、4 水中ポンプ、5 採鉱母船、7 海底鉱床、8 鉱砕、11 クローラ、12 本体フレーム、13 取付けブーム、19 ファインダーテレビ付き深海カメラ、22 切削ドラム、32 吸い込みノズル
【技術分野】
【0001】
本発明は、海底、特に深海に存在する鉱床の採鉱方法およびその採鉱ユニットに関するものである。
【背景技術】
【0002】
近頃、水深1000mを超える大深海の海底に金、銅、鉛、亜鉛、ニッケル、コバルト、白金その他レアメタル、レアアースなどのメタル資源を有する海底鉱床が多数存在することが各種の探査により確認されている。
【0003】
ところで、前記海底鉱床の資源を利用するには海底鉱床を破砕して採鉱する手段が必要であり、従来から例えば特開平7−217361号公報や特開2004−143741号公報に提示されているように船から掻き取り機を沈降させたり岩盤破砕用爪を落下させたりする手段が知られているが、殆どが比較的浅い海域での使用を前提としたものやサンプリングに関するものであり、実際に採鉱する技術については開示されていない。
【0004】
また、直接、海底に沈降させて海底の岩盤を掘削する海底掘削機が特開昭63−130829号公報に提示されているが、この公報に提示されている海底掘削機は、平面が矩形状の枠体の四隅に伸縮脚を設けた本体フレームと同様な移動フレームとを長手方向に直交する方向に移動可能にスライダーにより支持するとともに、本体フレームの先方に切削ドラムであるロードヘッタと下方にドラムカッターを備えたものである。
【0005】
従って、海底や海底鉱床上を自由に且つ迅速に走行して効率よく採鉱をすることができず、海底に凹凸があったり、傾斜している場合には本体フレームおよび移動フレームの四隅に配置した伸縮脚におけるそれぞれの長さを調節しないと移動することができないという問題があり、特に、海底鉱床にあっては資源が山形に堆積していることから傾斜面を登坂した状態で掘削する必要があり使用することが困難である。
【0006】
また、前記従来の海底採鉱機は比較的浅い海底土木の目的で岩盤を切削するためのものであり、例えばマンガン団塊やコバルトクラフトのように3000mを越える大深海において使用するには着底や切削操作に困難な面が多い、という問題がある。
【0007】
更に、前記従来の海底掘削機は、掘削した砕鉱を集鉱するための装置が必要であり、そのため、掘削機とは別の集鉱機を必要とすることから大型の採鉱母船が必要であり、設備費や運航費が嵩むという問題がある。これらの問題点を解消するために特開昭63−130829号公報には集鉱機を併設した海底掘削機も提案されているが、海底掘削機が全体として重量が増して海底の移動などにおいて機能的でないばかりか複雑な構成となり保守や整備が困難であり、また、併設したものは掘削機が主であり、集鉱機の部分が従となり性能的にも十分とはいえない。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開平7−217361号公報
【特許文献2】特開2004−143741号公報
【特許文献3】特開昭63−130829号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
本発明は、上記のような問題を解決しようとするものであり、大深海に存在する海底鉱床を容易且つ確実に採鉱、集鉱が可能である作業効率のよい海底鉱床の採鉱方法およびそのユニットを提供することを課題とする。
【課題を解決するための手段】
【0010】
前記課題を解決するためになされた本発明である海底鉱床の採鉱方法は、左右一対のクローラが備えられている本体フレームの先方に備えられた少なくとも上下に揺動可能な取付けブームに海底鉱床を掘削する掘削装置および前記掘削装置により掘削されて海底に散在する鉱砕を集鉱する集鉱装置がそれぞれ交換可能に取り付け可能な採鉱機を採鉱母船に積載して採掘現場に停泊し、前記掘削装置を装着した状態の前記採掘機を海底の採鉱位置に沈降、着底させて、前記掘削装置により海底鉱床を掘削して所定量の砕鉱を形成した後、前記採鉱機を採鉱母船に引き上げて掘削装置を集鉱装置に交換して再び海底の前記砕鉱堆積位置に沈降、着底させて前記掘削して形成した砕鉱を前記集鉱装置により集鉱して海底に設置した水中ポンプを介して前記採鉱母船上に搬送することを特徴とする。
【0011】
本発明によれば、採掘現場に停泊させた採鉱母船から積載している採掘機に掘削装置を装着した状態で海底における所定の採鉱位置に着底させ、採掘機をクローラにより自走させることにより海底鉱床を掘削し、所定の掘削が終了した後、採掘機を採鉱母船に引き上げ、採掘機に集鉱装置を装着した状態で海底における前記掘削鉱位置に着底させて集鉱して採鉱母船に搬送することにより、一台の採鉱機を使って、効率よく採鉱作業を行うことができる。
【0012】
また、本発明において、前記採鉱機を採鉱母船から海底における所定位置に着底させる際に、前記採鉱機に搭載した水中位置測位装置、ファインダーテレビ付き深海カメラからの信号により採鉱機の位置を採鉱母船上で確認しながら採鉱機に付設してあるスラスターにより位置を調整しながら下降させることにより、暗視野状態で潮流などがある大深海であっても容易に且つ簡単に計画した所定の現場に着底させることができる。
【0013】
更に、海底の採鉱位置や集鉱位置およびその周辺の情報を前記採鉱機に搭載した水中位置測位装置、ファインダーテレビ付き深海カメラ、ソナー画像により採鉱母船上に送信し、船上で確認して後に採鉱機を着底させることにより確実に計画した所定位置に採鉱機を着底させることができる。
【0014】
更にまた、前記海底の所定位置に着底後に、前記採鉱機に搭載した水中位置測位装置、ファインダーテレビ付き深海カメラ、ソナー画像により前記採鉱機のクローラおよび切削ドラムなどの駆動機構についての異常を採鉱母船上で確認することにより、即座に対応することができ、無駄な時間と作業を省くことができる。
【0015】
加えて、前記海底の採鉱位置に着底後に、前記採鉱機に搭載した水中位置測位装置、ファインダーテレビ付き深海カメラ、ソナーからの画像により船上において移動距離および移動ルートを確認しながら前記採鉱機を走行させて所定の採鉱位置に移動させることができ、前記海底の所定位置に着底後に、前記採鉱機に搭載したファインダーテレビ付き深海カメラ、ソナーからの画像により船上において前記採鉱機の位置、姿勢などを確認しながら前記クローラおよび切削ドラムなどを遠隔駆動させることにより暗視の大深海においても容易且つ確実に海底鉱床を採鉱、集鉱をすることができる。
【発明の効果】
【0016】
本発明によれば、大深海に存在する海底鉱床を容易且つ確実に採鉱、集鉱することが可能であり、採鉱母船からの採鉱機の昇降や海底での作業効率を向上させて、きわめて効率のよい採鉱、集鉱をすることができる。
【図面の簡単な説明】
【0017】
【図1】本発明に使用する採鉱機についての好ましい実施の形態を示す分解した状態の側面図である。
【図2】図1に示した実施の形態における採鉱機についての本体を示す平面図である。
【図3】図1に示した採鉱機についての実施の形態における掘削装置を装着した状態の側面図である。
【図4】図1に示した採鉱機についての実施の形態における集鉱装置を装着した状態の側面図である。
【図5】図3に示した実施の形態における採鉱機を用いた使用状態を示す説明図である。
【図6】図3に示した実施の形態における採鉱機を用いた使用状態を示す説明図である。
【図7】図3に示した実施の形態における採鉱機を用いた使用状態を示す拡大説明図である。
【図8】図3に示した実施の形態における採鉱機を用いた異なる使用状態を示す拡大説明図である。
【図9】図4に示した実施の形態における採鉱機を用いた使用状態を示す説明図である。
【図10】図4に示した実施の形態における採鉱機を用いた異なる使用状態を示す拡大説明図である。
【発明を実施するための形態】
【0018】
以下に、本発明を図面に示す実施の形態に基づいて詳細に説明する。
【0019】
図1は本発明である海底鉱床の採鉱方法を実施するために用いられる採鉱ユニットに用いられる採鉱機1の好ましい実施の形態を示すものであり、採鉱機1は、左右一対のクローラ11が備えられている本体フレーム12に前後方向へスライド可能なスライドブーム13が配置されているとともに、このスライドブーム13の先方に伸縮シリンダ15,15により上下に揺動可能な取付けブーム16が配置されている。
【0020】
前記クローラ11,11は陸上で使用されるものと変わりないが高圧の海水中でも作動が可能なものであり、例えば後方の駆動輪17に配置したモータや減速機などの本体フレーム12に搭載される駆動手段(図示せず)により走行するものであり、本実施の形態では船上から例えばアンピリカルケーブル(図示せず)などを用い有線により運転される。
【0021】
そして、前記取付けブーム16には海底鉱床を掘削するために用いられる掘削装置2と、掘削装置2により掘削されて海底に散在する鉱砕を集鉱する集鉱装置3が交換可能に取り付けられる。
【0022】
本実施の形態では掘削装置2は、後部にたとえば油圧モータのような回転駆動部21を内蔵するとともに先端に前記回転駆動部21により回転する周囲に複数の掘削ビット(図示せず)を突設させた掘削ドラム22を備えた構成であり、後部に備えた取付部23において前記取付けブーム16に取り外し可能に装着される。
【0023】
また、前記集鉱装置3は、前記取付けブーム16に取り外し可能に装着される先端に吸込口31を形成した集鉱ノズル32と、本体フレーム12の前後にわたって配置される集鉱管33と、前記集鉱ノズル32と集鉱管33とを繋ぐフレキシブル管34と、前記集鉱管33の後端に接続されて後述する海底の所定位置に設置された水中ポンプの吸い込み口
に接続される移送ホース35とから構成される。
【0024】
更に、本実施の形態では、本体フレーム12に、採掘機1が深海の高圧下においても正常に走行できるようにするためや掘削ドラム22により掘削時に記採掘機1が安定した姿勢を保つことができるようにするためにカウンターウェイト111を後方に配置しており、また、海底や海底鉱床において安定した状態を保つように、アウトリガー18が設置されている。
【0025】
更にまた、本実施の形態では、採掘機1には水中位置測定装置、ソナー、スラスター、(図示せず)並びにファィンダーテレビ付き深海カメラ(FDC)19等が設置されている。
【0026】
次に、前記海底鉱床の採鉱ユニットを用いた本発明である海底鉱床の採鉱方法について説明する。
【0027】
図5乃至図10は前記図1乃至図4に示した採鉱機1を用いた本発明である海底鉱床の採鉱方法についての実施の形態の一例を示すものであり、本発明である海底鉱床の採鉱ユニットは、主として前記採鉱機1と海底の所定位置に配置される水中ポンプ4とこれらおよびこれらの付属機器や機材(図示せず)を積載して海底鉱床の現場に搬送する採鉱母船5とからなり、特に、採鉱母船5は、前記採鉱機1や水中ポンプ4などの各機器を海底に昇降させる昇降機51、海底に着底させる前記各機器を遠隔操作するための各種のセンサーや制御部52、更には、海底から搬送される海底鉱床から採鉱した砕鉱を積載する積載庫53などを有している。
【0028】
そして、始めに、図5に示すように、採鉱機1などの機器などを採鉱母船5に積載して採鉱現場の海域に搬送し、採鉱機1などを船上に備えた昇降機51を用いて予め調査しておいた海底の所定の位置に着底させる。
【0029】
このとき、本実施の形態では、最初に採鉱機1に掘削装置2を装着した状態として昇降機51によりワイヤーなどで吊下げて海底に着底させることになるが、鉱床のある海底までは数千メートルもあるのが通常であり、海上は風や波浪があったりするので採鉱母船5は海上の所定位置にピンポイントに停泊している訳にはいかず、海中では潮流もあり吊り下げられた機器が浮遊状態になるので深海における海底の所定位置に着底させるのはきわめて困難な作業となる。
【0030】
そこで、本実施の形態では、採鉱機1に搭載した水中位置測位装置、スラスターおよびファインダーテレビ付き深海カメラ19を用いて採鉱機1の位置を採鉱母船5上で確認しながら海底6に沈降させることにより、予め測定してある所定の採鉱位置に確実に沈降させることができる。
【0031】
具体的には、例えば潮流の影響により所定の着底地点に対して水平方向への変位が生じた場合には採鉱母船5を操舵して位置を修正し、潮流などにより採鉱機1自身が回転したりした場合には採鉱機1に搭載している水準器や方位径で確認してスラスター(図示せず)により正位に修正する。尚、採鉱機1の機構ならびに搭載機器の操作などは全て採鉱母船5に設置された制御装置52により基本的に有線により遠隔制御される(以下同様)。
【0032】
そして、本実施の形態では、海底近くまで沈降させた採鉱機1を着底させる前に、採鉱機1に搭載した水中位置測位装置からの位置情報、およびファインダーテレビ付き深海カメラ19やソナーからの画像を採鉱母船5における制御装置4の制御監視モニタ(図示せず)により視認して所定の位置であることと着底に支障のないことを確認した後に着底さ
せる。
【0033】
従って、安全に着底が行われるので採鉱機1などの機器が損傷する心配がなく、また、着底地点の情報を入手できることからその後の作業か無駄なく迅速且つ確実に行うことができる。
【0034】
さらに、本実施の形態では着底後に、掘削ドラム22やクローラ11,11の動作などを確認して着底時の衝撃力や水圧などによる影響がないことを確認する。これらの確認については各機器に各種のセンサーなどを設置しておき、それらからの検知信号を採鉱母船5上の制御装置52により確認することができる(図示せず)。殊に、本実施の形態では採鉱機1はファインダーテレビ付き深海カメラ19やソナーなどを搭載しているので、これらの機器を採鉱機1の周囲だけでなく採鉱機1自身の機器についても映像が得られる位置に設置し、或いは自身の機器の映像が得られるものを別に搭載することにより、主要機材に以上がないことを採鉱母船5の制御装置51に送信して画像で確認することによりクローラ11,11および切削ドラム22などの駆動機構についての異常を確認することができる。
【0035】
このようにして着底した採鉱機1は、クローラ11,11を駆動して海底を走行させて所定の海底鉱床に向けて走行、移動させる。このとき、本実施の形態では、採鉱機1に搭載した水中位置測位装置や方位計からの検知信号、ファインダーテレビ付き深海カメラ19、ソナーからの画像を採鉱母船5における制御装置52制御監視モニタ(図示せず)により視認して船上において移動距離および移動ルートを確認しながら走行させて所定の採鉱位置に確実に且つ迅速に移動させることができる。勿論、前記水中位置測位装置、ファインダーテレビ付き深海カメラ19、ソナーからの採鉱機1の前方の情報を確認しながら行うことにより障害箇所をさけて目的箇所へ移動させることができる。
【0036】
本実施の形態では採鉱機1の走行手段としてクローラ11、11を用いているので海底に凹凸があったり傾斜面であっても支障なく迅速に且つ方向を問わずに走行可能であり、また所定の採鉱箇所で確実に停止させることができる。
【0037】
以上の手順で、図6に示すように海底鉱床7の所定の採鉱位置に採鉱機1が配置され、図7に示すように、海底鉱床7を海底鉱床採鉱機1の先端に備えた掘削装置2の掘削ドラム22により採鉱して鉱砕8にする。
【0038】
このとき、本実施の形態では、採鉱機1に搭載したファインダーテレビ付き深海カメラ19、ソナーからの画像により採鉱母船5における制御装置52の制御監視モニタにおいて前記採鉱機の位置、姿勢などを確認しながらクローラ11,11および切削ドラム22などを遠隔駆動させて掘削を行う。殊に、図8に示すように、海底鉱床7が上りの急傾斜地である場合には状況に応じてアウトリガー18を用いて滑り落ちる心配なく安定姿勢により掘削を行うことができる。
【0039】
殊に、本実施の形態では本体フレーム12の後方にカウンターウェイト111を搭載しているので高圧下の深海でも浮力や潮流の影響をなくして確実に海底6を走行させることができる。
【0040】
このようにして海底鉱床7を掘削して鉱砕8を形成し、これをクローラ11,11により整地しながら採鉱機1を進行する。掘削作業は、予め計画した所定の採掘量もしくは掘削る時間が経過したら停止し、前記採鉱機1を海底に降ろしたときと逆の手順により採鉱母船5に引き上げる。
【0041】
次に、前記採鉱母船5に引き上げた採鉱機1の掘削装置2をブーム16から取り外し、代わりに前記図4に示したように集鉱装置3を取り付けて、前記図5に示した掘削装置2を装着した場合と同様の手順により前記海底の掘削現場に沈降させて着底させる。
【0042】
そして、図9に示すように、採鉱機1に搭載されている集鉱管33の後端が移送ホース35を介して海底6に設置された水中ポンプ4に接続され、更に水中ポンプ4の排出口と採鉱母船5との間にフレキシブルライザー41が連結される。
【0043】
そして、図10に示すように、前記掘削装置2を装着した状態の採鉱機1で海底鉱床を掘削して形成した鉱砕8を集鉱して採鉱母船5へ搬送することにより短時間で効率よく海底資源を採取することができる。
【0044】
更に詳しく説明すると、本実施の形態では、採鉱機1は前記掘削装置2を取り付けた採鉱機1により掘削して形成した鉱砕8を集鉱ノズル32の先端に形成される吸込口31から吸い込み、集鉱ノズル32の後端に接続したフレキシブル管34を介して本体フレーム12に設置された集鉱管33の後端に接続した移送ホース35を介して水中ポンプ4に搬送され、更に、フレキシブルライザー41により採鉱母船5に搬送され、採鉱母船5に設置された積載庫53に積載される。
【0045】
そして、所定の採鉱作業が終了したら、採鉱機1を採鉱母船5に引き上げて帰港し、採取した海底鉱材を荷揚げする。
【0046】
このように、本実施の形態によれば、一台の採鉱機1により掘削および掘削した砕鉱を集鉱することができるので、設備の点で有利であるばかりか、採鉱母船5に採鉱機と集鉱機を積載する必要がなく、小型の採鉱母船5により作業を行うことができ、機動性に富むとともに経済的でも有利である。
【符号の説明】
【0047】
1 採鉱機、2 掘削装置、3 集鉱装置、4 水中ポンプ、5 採鉱母船、7 海底鉱床、8 鉱砕、11 クローラ、12 本体フレーム、13 取付けブーム、19 ファインダーテレビ付き深海カメラ、22 切削ドラム、32 吸い込みノズル
【特許請求の範囲】
【請求項1】
左右一対のクローラが備えられている本体フレームの先方に備えられた少なくとも上下に揺動可能な取付けブームに海底鉱床を掘削する掘削装置および前記掘削装置により掘削されて海底に散在する鉱砕を集鉱する集鉱装置がそれぞれ交換可能に取り付け可能な採鉱機を採鉱母船に積載して採掘現場に停泊し、前記掘削装置を装着した状態の前記採掘機を海底の採鉱位置に沈降、着底させて、前記掘削装置により海底鉱床を掘削して所定量の砕鉱を形成した後、前記採鉱機を採鉱母船に引き上げて掘削装置を集鉱装置に交換して再び海底の前記砕鉱堆積位置に沈降、着底させて前記掘削して形成した砕鉱を前記集鉱装置により集鉱して海底に設置した水中ポンプを介して前記採鉱母船上に搬送することを特徴とする海底鉱床の採鉱方法。
【請求項2】
前記採鉱機に搭載した水中位置測位装置、スラスターおよびファインダーテレビ付き深海カメラを用いて前記採鉱機の位置を採鉱母船上で確認しながら海底の採鉱位置に沈降させることを特徴とする請求項1記載の海底鉱床の採鉱方法。
【請求項3】
前記海底の採鉱位置およびその周辺の情報を前記採鉱機に搭載した水中位置測位装置、ファインダーテレビ付き深海カメラ、ソナー画像により採鉱母船上で確認して後に前記採鉱機を着底させることを特徴とする請求項1または2記載の海底鉱床の採鉱方法。
【請求項4】
前記海底の採鉱位置に着底後に、前記採鉱機に搭載した水中位置測位装置、ファインダーテレビ付き深海カメラ、ソナー画像により前記採鉱機のクローラおよび切削ドラムなどの駆動機構についての異常を採鉱母船上で確認することを特徴とする請求項1,2または3記載の海底鉱床の採鉱方法。
【請求項5】
前記採鉱機が海底の採鉱位置に着底した後、前記採鉱機に搭載した水中位置測位装置、ファインダーテレビ付き深海カメラ、ソナーからの画像により船上において移動距離および移動ルートを確認しながら前記採鉱機または集鉱機を走行させて所定位置に移動させることを特徴とする請求項1,2,3または4記載の海底鉱床の採鉱方法。
【請求項6】
前記採鉱機が海底の採鉱位置に着底した後、海底の所定位置に着底後に、前記採鉱機に搭載したファインダーテレビ付き深海カメラ、水準器、方位計、ソナーからの画像などを基にして船上において前記採鉱機の位置、姿勢などを確認しながら前記クローラおよび切削ドラムなどを遠隔駆動させて作業を行うことを特徴とする請求項1,2,3,4または5記載の海底鉱床の採鉱方法。
【請求項7】
海底鉱床を掘削して鉱砕とするための切削ドラムと吸い込みノズルを交換可能に先方に備えるとともにクローラにより自走する採掘機と、海底の採鉱位置に配置した水中ポンプと、前記採掘機と集鉱機を積載する採鉱母船とを有し、前記請求項1,2,3,4,5または6記載の海底鉱床の採鉱方法を実施する海底鉱床の採鉱ユニット。
【請求項1】
左右一対のクローラが備えられている本体フレームの先方に備えられた少なくとも上下に揺動可能な取付けブームに海底鉱床を掘削する掘削装置および前記掘削装置により掘削されて海底に散在する鉱砕を集鉱する集鉱装置がそれぞれ交換可能に取り付け可能な採鉱機を採鉱母船に積載して採掘現場に停泊し、前記掘削装置を装着した状態の前記採掘機を海底の採鉱位置に沈降、着底させて、前記掘削装置により海底鉱床を掘削して所定量の砕鉱を形成した後、前記採鉱機を採鉱母船に引き上げて掘削装置を集鉱装置に交換して再び海底の前記砕鉱堆積位置に沈降、着底させて前記掘削して形成した砕鉱を前記集鉱装置により集鉱して海底に設置した水中ポンプを介して前記採鉱母船上に搬送することを特徴とする海底鉱床の採鉱方法。
【請求項2】
前記採鉱機に搭載した水中位置測位装置、スラスターおよびファインダーテレビ付き深海カメラを用いて前記採鉱機の位置を採鉱母船上で確認しながら海底の採鉱位置に沈降させることを特徴とする請求項1記載の海底鉱床の採鉱方法。
【請求項3】
前記海底の採鉱位置およびその周辺の情報を前記採鉱機に搭載した水中位置測位装置、ファインダーテレビ付き深海カメラ、ソナー画像により採鉱母船上で確認して後に前記採鉱機を着底させることを特徴とする請求項1または2記載の海底鉱床の採鉱方法。
【請求項4】
前記海底の採鉱位置に着底後に、前記採鉱機に搭載した水中位置測位装置、ファインダーテレビ付き深海カメラ、ソナー画像により前記採鉱機のクローラおよび切削ドラムなどの駆動機構についての異常を採鉱母船上で確認することを特徴とする請求項1,2または3記載の海底鉱床の採鉱方法。
【請求項5】
前記採鉱機が海底の採鉱位置に着底した後、前記採鉱機に搭載した水中位置測位装置、ファインダーテレビ付き深海カメラ、ソナーからの画像により船上において移動距離および移動ルートを確認しながら前記採鉱機または集鉱機を走行させて所定位置に移動させることを特徴とする請求項1,2,3または4記載の海底鉱床の採鉱方法。
【請求項6】
前記採鉱機が海底の採鉱位置に着底した後、海底の所定位置に着底後に、前記採鉱機に搭載したファインダーテレビ付き深海カメラ、水準器、方位計、ソナーからの画像などを基にして船上において前記採鉱機の位置、姿勢などを確認しながら前記クローラおよび切削ドラムなどを遠隔駆動させて作業を行うことを特徴とする請求項1,2,3,4または5記載の海底鉱床の採鉱方法。
【請求項7】
海底鉱床を掘削して鉱砕とするための切削ドラムと吸い込みノズルを交換可能に先方に備えるとともにクローラにより自走する採掘機と、海底の採鉱位置に配置した水中ポンプと、前記採掘機と集鉱機を積載する採鉱母船とを有し、前記請求項1,2,3,4,5または6記載の海底鉱床の採鉱方法を実施する海底鉱床の採鉱ユニット。
【図1】


【図2】
【図3】
【図4】
【図7】
【図8】
【図10】
【図5】
【図6】
【図9】
【図2】
【図3】
【図4】
【図7】
【図8】
【図10】
【図5】
【図6】
【図9】
【公開番号】特開2012−144944(P2012−144944A)
【公開日】平成24年8月2日(2012.8.2)
【国際特許分類】
【出願番号】特願2011−5779(P2011−5779)
【出願日】平成23年1月14日(2011.1.14)
【出願人】(306022513)新日鉄エンジニアリング株式会社 (897)
【出願人】(501204525)独立行政法人海上技術安全研究所 (185)
【出願人】(393030899)アジア海洋株式会社 (4)
【出願人】(000005924)株式会社三井三池製作所 (43)
【Fターム(参考)】
【公開日】平成24年8月2日(2012.8.2)
【国際特許分類】
【出願日】平成23年1月14日(2011.1.14)
【出願人】(306022513)新日鉄エンジニアリング株式会社 (897)
【出願人】(501204525)独立行政法人海上技術安全研究所 (185)
【出願人】(393030899)アジア海洋株式会社 (4)
【出願人】(000005924)株式会社三井三池製作所 (43)
【Fターム(参考)】
[ Back to top ]