
海苔作業船
【課題】操船性の向上、操船環境の向上、安全性の向上等を図ることのできる海苔作業船を提供すること。
【解決手段】海苔養殖場に設置された海苔網に対して所定の処理を施す海苔作業船1において、船の操船性を支援する操船支援手段を備えていることを特徴とする。前記操船支援手段は、上下動自在若しくは起倒自在なレーダー16と、少なくとも船体前方を撮影するカメラ17と、このカメラらからの撮影映像を表示するカメラ用モニタとの組み合わせと、少なくとも船体前方を照明する光源19と、自船の絶対位置を示すGPSシステムと、少なくとも自船の位置の表示、進行航路案内の表示が可能なナビシステムと、海苔網に対する前記処理作業、自船の操船作業を自動的に実行させる自動操船システムと、操舵室内の空調システム23との1種若しくは複数種の組み合わせによって形成されていることを特徴とする。
【解決手段】海苔養殖場に設置された海苔網に対して所定の処理を施す海苔作業船1において、船の操船性を支援する操船支援手段を備えていることを特徴とする。前記操船支援手段は、上下動自在若しくは起倒自在なレーダー16と、少なくとも船体前方を撮影するカメラ17と、このカメラらからの撮影映像を表示するカメラ用モニタとの組み合わせと、少なくとも船体前方を照明する光源19と、自船の絶対位置を示すGPSシステムと、少なくとも自船の位置の表示、進行航路案内の表示が可能なナビシステムと、海苔網に対する前記処理作業、自船の操船作業を自動的に実行させる自動操船システムと、操舵室内の空調システム23との1種若しくは複数種の組み合わせによって形成されていることを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、海苔養殖場において海面部分に展張されている海苔網に効果的な各種の処理を施す海苔作業船に係り、特に海苔網の下を潜って通過しながら処理を施す場合に好適な海苔作業船に関する。
【背景技術】
【0002】
一般に、海苔養殖は海苔網に浮子を取付けて海面に浮かすように展張して錨で止める浮き流し方式や海中に立設した支柱に海苔網を展張した支柱方式によって行なわれている。
【0003】
このような方式の海苔養殖に用いられている海苔網に対する前記の各種の処理としては、海苔網に育生している海苔の採取作業や、海苔の健全な育成を図るために各種の処理液を海苔網に付与する作業等があげられる。前記処理液としては、例えば海苔に赤ぐされ病や色落ち等の病気を発生させる細菌類や藻類を死滅させる酸性やアルカリ性の処理液、海苔に栄養を付与したり、色落ちした海苔の色を戻すための各種の栄養塩を含有する処理液等が挙げられる。
【0004】
本出願人は、海苔網に対する前記の各種の処理を能率よく施すことを可能とした種々の海苔作業船を提案している(特許文献1〜5参照)。
【0005】
これらの海苔作業船においては、操舵室に搭乗した1人の作業員が操船することによって、基地となる港と海苔養殖場とを往復したり、海苔養殖場においては、海苔網の長手方向に進行する間に最初に海苔網を船上に掬い上げ、続いて海苔網の下を潜りながら進んで海苔の刈取り作業や処理液の付与作業を施している。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特許第2795553号公報
【特許文献2】特許第2957968号公報
【特許文献3】特開平10−150884号公報
【特許文献4】特開平11−000070号公報
【特許文献5】特開2008−011742号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
前記各文献の海苔作業船によれば、海苔網に対する各種の処理が能率よく十分な効果を発揮するようにして実行されている。
【0008】
今日においては、これらの海苔作業船に対しては、これまで海苔網に対する各種の処理の効率化を図る工夫がなされてきたが、更に一隻の船としての操船性の向上、操船環境の向上、安全性の向上等や、より一層高品質な海苔の採取が可能とすることが要望されている。
【0009】
これは海苔の養殖期間が晩秋から早春という期間であり、霧が発生し易く、気温および水温も低い厳寒期を含んでいて、気象条件が悪い場合が多いために、このような要望がなされている。特に、海苔が光合成を行わない夜間において、一日で最も高品質な黒い海苔を採取する夜間作業を実行するためである。
【0010】
本発明は、これらの点に鑑みてなされたものであり、操船性の向上、操船環境の向上、安全性の向上等を図ることができ、また、より一層高品質な海苔の採取が可能である海苔作業船を提供することを目的とする。
【課題を解決するための手段】
【0011】
前述した目的を達成するために請求項1に記載の海苔作業船は、海苔養殖場に設置された海苔網に対して所定の処理を施す海苔作業船において、船の操船性を支援する操船支援手段を備えていることを特徴とする。
【0012】
そして、このような構成を採用したことにより、操船支援手段を利用して海苔作業船を操船することができ、操船性の向上、操船環境の向上、安全性の向上等を図ることができ、また、より一層高品質な海苔の採取が可能である。
【0013】
また、前記操船支援手段は、海苔網に対する処理を施している場合には船上を通過する海苔網より低い位置に設置され、前記処理を施さない場合には前記海苔網より高い位置に設置されるように上下動自在若しくは起倒自在なレーダーと、少なくとも船体前方を撮影するカメラと、このカメラらからの撮影映像を表示するカメラ用モニタとの組み合わせと、少なくとも船体前方を照明する光源と、自船の絶対位置を示すGPSシステムと、少なくとも自船の位置の表示、進行航路案内の表示が可能なナビシステムと、海苔網に対する前記処理作業、自船の操船作業を自動的に実行させる自動操船システムと、操舵室内の空調システムとの1種若しくは複数種の組み合わせによって形成されていることを特徴とする。
【0014】
そして、このような構成を採用したことにより、次のような作用効果を発揮することができる。
【0015】
例えば、海苔網に対する処理を施している場合には船上を通過する海苔網より低い位置に設置され、前記処理を施さない場合には前記海苔網より高い位置に設置されるように上下動自在若しくは起倒自在なレーダーを用いると、前記処理を施さない場合にはレーダーを海苔網より高い位置に設置して操船することができるので、濃霧や夜間の視界不明な場合においてもレーダーの受信精度が高くなり、その探知機能を十分に発揮させて安全に操船することができる。
【0016】
また、少なくとも船体前方を撮影するカメラと、このカメラらからの撮影映像を表示するカメラ用モニタとの組み合わせを用いると、モニタによって海苔網の位置を確認しながら、船体の舳先および海苔網を掬い上げる部材を海苔網の幅方向の中央部分に適正に位置あわせして船体を進行させることができる。これにより海苔網に対する各種の作業(海苔の採取や処理液の付与等)を適正かつ容易に実行することができる。
【0017】
また、少なくとも船体前方を照明する光源を用いると、夜間や濃霧の場合においても船体の前方を明るく照明して船を安全に操船することができる。また、レーダーやカメラおよびカメラ用モニタと組み合わせることにより、各部の機能が相乗的に作用して、夜間や濃霧の場合における操船性や各種の作業の正確性、効率性を向上させることができる。
【0018】
また、自船の絶対位置を示すGPSシステムを用いると、自船の絶対位置を常に把握して操船や作業を実行することができる。
【0019】
また、少なくとも自船の位置の表示、進行航路案内の表示が可能なナビシステムを用いると、表示された自船の位置や進行航路案内を目視によって確認しながら操船や作業を実行することができる。
【0020】
また、海苔網に対する前記処理作業、自船の操船作業を自動的に実行させる自動操船システムを用いると、海苔作業船の無人化を図ることができ、作業員による実作業を省略することができる。
【0021】
また、操舵室内の空調システムを用いると、操舵室内の作業環境を良好に保持することができ、作業員の作業の円滑性、正確性、効率性を図ることができる。
【発明の効果】
【0022】
以上説明したように本発明の海苔作業船によれば、操船性の向上、操船環境の向上、安全性の向上等を図ることができ、また、より一層高品質な海苔の採取が可能である等の効果を奏する。
【図面の簡単な説明】
【0023】
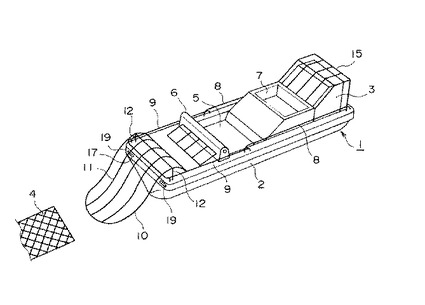
【図1】本発明の海苔作業船の一実施形態を示す概略斜視図
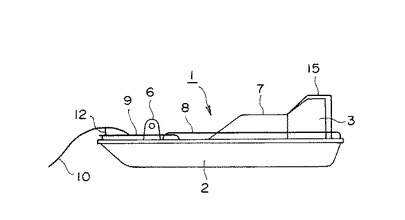
【図2】図1に示す海苔作業船の側面図
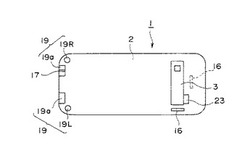
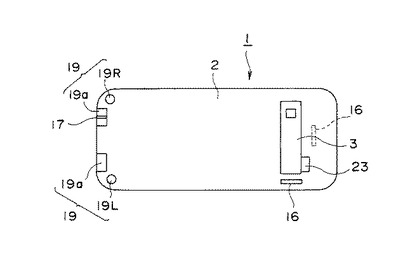
【図3】本発明の操船支援手段を搭載した海苔作業船の要部を示す平面図
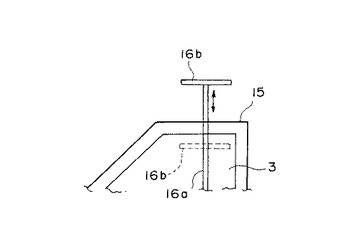
【図4】レーダーの詳細を示す側面図
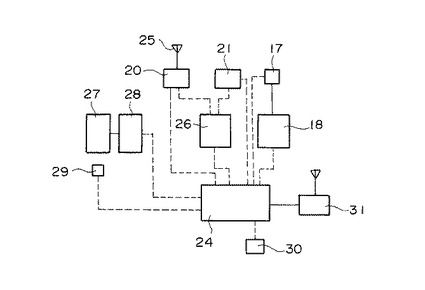
【図5】本発明の海苔作業船の制御系を示すブロック図
【発明を実施するための形態】
【0024】
以下、本発明を図面に示す実施の形態により説明する。
【0025】
図1から図5は本発明の海苔作業船の一実施の形態を示している。
【0026】
本実施形態の海苔作業船1は、前記特許文献に記載されている公知の一般的な船体2と各種の装備を備えている。
【0027】
具体的には、船体2の後方寄りには、作業者が搭乗し所定の操船等の操作を行なう操舵室3が配設されており、この船体2の甲板部分には、海苔網4から採取した海苔を貯留するための貯留部5が形成されている。また、船体2の貯留部5より船首側には、海苔を採取するための海苔の刈取り機構6が配設されている。この刈取り機構6には、海苔を採取するために放射状に配置された複数のL字状の刃(図示せず)が回転駆動自在に配設されている。海苔作業船1において、海苔の刈取りを行わない場合においては、この刈取り機構6を省略することもできる。さらに、船体2の操舵室3の前方近傍には、海苔網4に対して付与される適宜の処理液を貯留するための処理液槽7が配設されている。この処理液槽7の内部には、海苔網4が処理液中に浸漬されるように案内する図示しない強制浸漬具が配設されている。また、船体2の船尾には、この船体2を移動させるためのスクリュ等の図示しない推進装置が配設されている。
【0028】
また、船体2の両側には、その両側部に沿って船尾まで延在する側部案内部材8,8が配設されており、さらに船体2の両側であって側部案内部材8より船首側には、側部前側案内部材9が配設されている。この側部前側案内部材9の近傍には、先端部が平面形状U字状に形成された前部案内部材10が図示しないワイヤの繰出し、巻取り動作により側部前側案内部材9に沿って前後に進退自在に取付けられている。この前部案内部材10は、ワイヤの動作により最も前方に延出された状態で、その前部案内部材10の先端部が船体2の船首部分から海中に没するようになされている。前部案内部材10の内側には、前後方向に延在する伸子棒引掛かり防止部材としての複数のガード部材11,11…が配設されており、さらに前部案内部材10の両基端部には、上下方向に延在する振れ防止部材12が一体に形成されている。この振れ防止部材12は、前部案内部材10の先端部が船体2の船首部分から海中に没するように延出された状態で、側部前側案内部材9の前方内側に当接し、この前部案内部材10の横方向への振れを防止するようになされている。
【0029】
さらに、刈取り機構6の前方には、海苔網4を刈取り機構6に案内するためのほぼ四角形状を有する伸子棒引掛かり防止部材としてのガード枠13がその後端側が高く位置するように傾斜して配設されており、このガード枠13には、前後方向に延在する複数のガード部材14,14…が配設されている。
【0030】
また、操舵室3の前部、上部および後部の両側には、操舵室3の周囲を取り囲むようにして後部案内部材15が配設されている。海苔網4はこの後部案内部材15の上方を通過することになる。
【0031】
船体2には、例えば、前記特許文献に記載されているように、処理液槽7による所定の処理を施した後の海苔網4をその処理に有効な時間だけ空中に浮上させた後に海苔網4を海面の展張位置へ導びいて再び展張させる伸縮自在な案内部材(前記特許文献1および2における後部案内部材参照)や、その他の公知の装備が設けられているが、説明を省略する。
【0032】
本実施形態においては、このように形成されている海苔作業船1に対して、本発明に従って、船の操船性を支援する操船支援手段をさらに設置している。
【0033】
本実施形態においては、この操船支援手段として、レーダー16と、カメラ17とカメラ用モニタ18との組み合わせと、少なくとも船体2の前方を照明する光源19と、自船の絶対位置を示すGPSシステム20と、少なくとも自船の位置の表示、進行航路案内の表示が可能なナビシステム21と、海苔網4に対する前記処理作業、自船の操船作業を自動的に実行させる自動操船システム22と、操舵室内の空調システム23と、構成各部を関連動作させる制御部24とを設けている。
【0034】
次に、これらの各操船支援手段をさらに説明する。
【0035】
本実施形態におけるレーダー16は、図1、図3および図4に示すように、従前は後部案内部材15の頂部より低い位置、即ち海苔網4に対する処理を施す場合を想定して、船上を通過する海苔網4より低い位置になるように高さ設定されていたものを、前記処理を施さない場合には海苔網4より高い位置まで伸びるように上下動自在に形成されている。具体的には、操舵室3の側部に配置されているレーダー16の支柱16aを上下方向に伸縮自在に形成してその頂部に水平に設けられているアンテナ部16bを後部案内部材15の頂部より低い位置から高い位置まで上下動自在に形成している。また、図3の破線に示すように、操舵室3の後方の船尾部に配置されているT字形状のレーダー16の支柱16aを起倒自在に形成して、当該支柱16aを倒れている状態から起立させることによりアンテナ部16bを後部案内部材15の頂部より低い位置から高い位置まで起倒自在とさせてもよい。
【0036】
前記カメラ17とカメラ用モニタ18との組み合わせは、図1、図3および図5に示すように、少なくとも船体2の前方を撮影するカメラ17を船体2の先端面に装着し、このカメラ17らからの撮影映像を表示するカメラ用モニタ18を操舵室3内に取付けて形成されている。
【0037】
前記光源19は、図1および図3に示すように、船体2の先端面の左右側に合計2個のヘッドライト19aを設け、船体2の先端部の左右のコーナー部分に一点照射型のサーチライト19Lと広域照射型のサーチライト19Rを設けて形成されている。光源19としては船体2の前方以外の部分を照射する他のライトを必要に応じて設置するとよい。
【0038】
前記GPSシステム20は、公知のシステムを利用するとよく、多用途アンテナ25を通して衛星からの情報を受信して自船の絶対位置を操舵室3内に設置した多用途モニタ26に表示するように形成されている。
【0039】
前記ナビシステム21は、公知のシステムを利用するとよく、GPSシステム20と連携して前記多用途モニタ26に少なくとも自船の位置および進行航路案内の表示ができるように形成されている。ナビシステム21は、その他に地図データベース、進行航路設定機能、外部通信網との送受信機能等の必要な装備を備えている。
【0040】
前記自動操船システム22は、海苔網4に対する前記処理作業や自船の操船作業を自動的に実行させるものであり、図5に示すように、船体2に搭載されている全部の可動部27に所定の動作を実行させる駆動源28と可動部27の動作を検出するセンサ29とを設け、制御部24によって自動運転指令を発して所定の動作を実行させるように形成されている。海苔網4に対する前記処理作業を行うための可動部27としては、刈取り機構6、処理液槽7への処理液供給機構(図示せず)、前部案内部材10等が挙げられる。自船の操船作業を行うための可動部としては、エンジン、舵、レーダー16、カメラ17、光源19、GPSシステム20、ナビシステム21等が挙げられる。駆動源28としては、油圧シリンダ、エアーシリンダ、モータ、ポンプ、スイッチ等の各種のアクチュエータが挙げられる。制御部24には、手動運転と自動運転とを切り替えることのできるモード選択スイッチ30が接続されており、また、自動運転を船体2の外から無人で実行するための運転制御用通信手段31が接続されている。
【0041】
前記空調システム23としては、操舵室3内の作業環境を良くするために設置されている。
【0042】
次に、本実施例における操船支援手段による作用を主として説明する。
【0043】
本実施形態の海苔作業船は、船の操船性を支援する操船支援手段を備えている
ことにより、操船支援手段を利用して海苔作業船を操船することができ、操船性の向上、操船環境の向上、安全性の向上等を図ることができ、ひいてはより一層高品質な海苔の採取が可能である。
【0044】
具体的には、海苔網4に対する処理を施している場合には船1上を通過する海苔網4より低い位置に設置され、前記処理を施さない場合には海苔網4より高い位置に設置される上下動自在若しくは起倒自在なレーダー16を用いると、前記処理を施さない場合にはレーダー16を海苔網4より高い位置、即ち後部案内部材15よりもアンテナ部16bを高い位置において操船することができるので、濃霧や夜間の視界不明な場合においてもレーダー16の受信精度が高くなり、その探知機能を十分に発揮させて安全に操船することができる。
【0045】
また、少なくとも船体2の前方を撮影するカメラ17と、このカメラ17らからの撮影映像を表示するカメラ用モニタ18との組み合わせを用いると、操舵室3内の作業員はモニタ18によって海苔網4の位置を確認しながら、船体2の舳先および海苔網4を掬い上げる前部前側案内部材10を海苔網4の幅方向の中央部分に適正に位置あわせして船体2を進行させることができる。これにより海苔網4に対する各種の作業(海苔の採取や処理液の付与等)を適正かつ容易に実行することができる。
【0046】
また、少なくとも船体2の前方を照明する光源19を用いると、夜間や濃霧の場合においても船体2の前方を明るく照明して船1を安全に操船することができる。また、レーダー16やカメラ17およびカメラ用モニタ18と組み合わせることにより、各部の機能が相乗的に作用して、夜間や濃霧の場合における操船性や各種の作業の正確性、効率性をより一層向上させることができる。特に、夜間作業を実行することにより、海苔が光合成を行わない夜間において、一日で最も高品質な黒い海苔を採取することができる。更に、海苔は夜間において細胞が収縮していて昼間より表面積が減少しているために、処理液槽7内を通過する海苔による処理液の消費量が相対的に減少し、少量の処理液による処理が可能となる。
【0047】
また、自船の絶対位置を示すGPSシステム20を用いると、自船の絶対位置を常に把握して操船や作業を実行することができる。
【0048】
また、少なくとも自船の位置の表示、進行航路案内の表示が可能なナビシステム21を用いると、表示された自船の位置や進行航路案内を目視によって確認しながら操船や作業を実行することができる。
【0049】
また、自動操船システム22を用いて海苔網4に対する前記処理作業や自船の操船作業を自動的に実行させる場合には、操舵室3内に作業員がいる際には、モード選択スイッチ30によって自動運転を選択し、無人で実行する際には、運転制御用通信手段31を通して運転指令を送信する。
【0050】
自動運転モードになると、制御部24から発せられる自動運転指令に従って船体2に搭載されている全部の可動部27の動作をセンサ29によって検出しながら駆動源28が可動部27を駆動して所定の動作を実行させる。これにより海苔網4に対する前記処理作業並びに自船の操船作業が自動運転される。
【0051】
作業員が操舵室3内にいる場合には、必要に応じて手動運転に切り替えるとよい。
【0052】
このように自動操船システム22を用いると、海苔作業船1の無人化を図ることができ、作業員による実作業を省略することができる。
【0053】
また、操舵室3内の空調システム23を用いると、操舵室3内の作業環境を(例えば、厳寒期に暖房を実行することにより)良好に保持することができ、作業員の作業の円滑性、正確性、効率性を図ることができる。
【0054】
また、本発明は前記実施の形態に限定されるものではなく、必要に応じて変更することができる。
【符号の説明】
【0055】
1 海苔作業船
2 船体
3 操舵室
4 海苔網
16 レーダー
17 カメラ
18 カメラ用モニタ
19 光源
20 GPSシステム
21 自動操船システム
23 空調システム
【技術分野】
【0001】
本発明は、海苔養殖場において海面部分に展張されている海苔網に効果的な各種の処理を施す海苔作業船に係り、特に海苔網の下を潜って通過しながら処理を施す場合に好適な海苔作業船に関する。
【背景技術】
【0002】
一般に、海苔養殖は海苔網に浮子を取付けて海面に浮かすように展張して錨で止める浮き流し方式や海中に立設した支柱に海苔網を展張した支柱方式によって行なわれている。
【0003】
このような方式の海苔養殖に用いられている海苔網に対する前記の各種の処理としては、海苔網に育生している海苔の採取作業や、海苔の健全な育成を図るために各種の処理液を海苔網に付与する作業等があげられる。前記処理液としては、例えば海苔に赤ぐされ病や色落ち等の病気を発生させる細菌類や藻類を死滅させる酸性やアルカリ性の処理液、海苔に栄養を付与したり、色落ちした海苔の色を戻すための各種の栄養塩を含有する処理液等が挙げられる。
【0004】
本出願人は、海苔網に対する前記の各種の処理を能率よく施すことを可能とした種々の海苔作業船を提案している(特許文献1〜5参照)。
【0005】
これらの海苔作業船においては、操舵室に搭乗した1人の作業員が操船することによって、基地となる港と海苔養殖場とを往復したり、海苔養殖場においては、海苔網の長手方向に進行する間に最初に海苔網を船上に掬い上げ、続いて海苔網の下を潜りながら進んで海苔の刈取り作業や処理液の付与作業を施している。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特許第2795553号公報
【特許文献2】特許第2957968号公報
【特許文献3】特開平10−150884号公報
【特許文献4】特開平11−000070号公報
【特許文献5】特開2008−011742号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
前記各文献の海苔作業船によれば、海苔網に対する各種の処理が能率よく十分な効果を発揮するようにして実行されている。
【0008】
今日においては、これらの海苔作業船に対しては、これまで海苔網に対する各種の処理の効率化を図る工夫がなされてきたが、更に一隻の船としての操船性の向上、操船環境の向上、安全性の向上等や、より一層高品質な海苔の採取が可能とすることが要望されている。
【0009】
これは海苔の養殖期間が晩秋から早春という期間であり、霧が発生し易く、気温および水温も低い厳寒期を含んでいて、気象条件が悪い場合が多いために、このような要望がなされている。特に、海苔が光合成を行わない夜間において、一日で最も高品質な黒い海苔を採取する夜間作業を実行するためである。
【0010】
本発明は、これらの点に鑑みてなされたものであり、操船性の向上、操船環境の向上、安全性の向上等を図ることができ、また、より一層高品質な海苔の採取が可能である海苔作業船を提供することを目的とする。
【課題を解決するための手段】
【0011】
前述した目的を達成するために請求項1に記載の海苔作業船は、海苔養殖場に設置された海苔網に対して所定の処理を施す海苔作業船において、船の操船性を支援する操船支援手段を備えていることを特徴とする。
【0012】
そして、このような構成を採用したことにより、操船支援手段を利用して海苔作業船を操船することができ、操船性の向上、操船環境の向上、安全性の向上等を図ることができ、また、より一層高品質な海苔の採取が可能である。
【0013】
また、前記操船支援手段は、海苔網に対する処理を施している場合には船上を通過する海苔網より低い位置に設置され、前記処理を施さない場合には前記海苔網より高い位置に設置されるように上下動自在若しくは起倒自在なレーダーと、少なくとも船体前方を撮影するカメラと、このカメラらからの撮影映像を表示するカメラ用モニタとの組み合わせと、少なくとも船体前方を照明する光源と、自船の絶対位置を示すGPSシステムと、少なくとも自船の位置の表示、進行航路案内の表示が可能なナビシステムと、海苔網に対する前記処理作業、自船の操船作業を自動的に実行させる自動操船システムと、操舵室内の空調システムとの1種若しくは複数種の組み合わせによって形成されていることを特徴とする。
【0014】
そして、このような構成を採用したことにより、次のような作用効果を発揮することができる。
【0015】
例えば、海苔網に対する処理を施している場合には船上を通過する海苔網より低い位置に設置され、前記処理を施さない場合には前記海苔網より高い位置に設置されるように上下動自在若しくは起倒自在なレーダーを用いると、前記処理を施さない場合にはレーダーを海苔網より高い位置に設置して操船することができるので、濃霧や夜間の視界不明な場合においてもレーダーの受信精度が高くなり、その探知機能を十分に発揮させて安全に操船することができる。
【0016】
また、少なくとも船体前方を撮影するカメラと、このカメラらからの撮影映像を表示するカメラ用モニタとの組み合わせを用いると、モニタによって海苔網の位置を確認しながら、船体の舳先および海苔網を掬い上げる部材を海苔網の幅方向の中央部分に適正に位置あわせして船体を進行させることができる。これにより海苔網に対する各種の作業(海苔の採取や処理液の付与等)を適正かつ容易に実行することができる。
【0017】
また、少なくとも船体前方を照明する光源を用いると、夜間や濃霧の場合においても船体の前方を明るく照明して船を安全に操船することができる。また、レーダーやカメラおよびカメラ用モニタと組み合わせることにより、各部の機能が相乗的に作用して、夜間や濃霧の場合における操船性や各種の作業の正確性、効率性を向上させることができる。
【0018】
また、自船の絶対位置を示すGPSシステムを用いると、自船の絶対位置を常に把握して操船や作業を実行することができる。
【0019】
また、少なくとも自船の位置の表示、進行航路案内の表示が可能なナビシステムを用いると、表示された自船の位置や進行航路案内を目視によって確認しながら操船や作業を実行することができる。
【0020】
また、海苔網に対する前記処理作業、自船の操船作業を自動的に実行させる自動操船システムを用いると、海苔作業船の無人化を図ることができ、作業員による実作業を省略することができる。
【0021】
また、操舵室内の空調システムを用いると、操舵室内の作業環境を良好に保持することができ、作業員の作業の円滑性、正確性、効率性を図ることができる。
【発明の効果】
【0022】
以上説明したように本発明の海苔作業船によれば、操船性の向上、操船環境の向上、安全性の向上等を図ることができ、また、より一層高品質な海苔の採取が可能である等の効果を奏する。
【図面の簡単な説明】
【0023】
【図1】本発明の海苔作業船の一実施形態を示す概略斜視図
【図2】図1に示す海苔作業船の側面図
【図3】本発明の操船支援手段を搭載した海苔作業船の要部を示す平面図
【図4】レーダーの詳細を示す側面図
【図5】本発明の海苔作業船の制御系を示すブロック図
【発明を実施するための形態】
【0024】
以下、本発明を図面に示す実施の形態により説明する。
【0025】
図1から図5は本発明の海苔作業船の一実施の形態を示している。
【0026】
本実施形態の海苔作業船1は、前記特許文献に記載されている公知の一般的な船体2と各種の装備を備えている。
【0027】
具体的には、船体2の後方寄りには、作業者が搭乗し所定の操船等の操作を行なう操舵室3が配設されており、この船体2の甲板部分には、海苔網4から採取した海苔を貯留するための貯留部5が形成されている。また、船体2の貯留部5より船首側には、海苔を採取するための海苔の刈取り機構6が配設されている。この刈取り機構6には、海苔を採取するために放射状に配置された複数のL字状の刃(図示せず)が回転駆動自在に配設されている。海苔作業船1において、海苔の刈取りを行わない場合においては、この刈取り機構6を省略することもできる。さらに、船体2の操舵室3の前方近傍には、海苔網4に対して付与される適宜の処理液を貯留するための処理液槽7が配設されている。この処理液槽7の内部には、海苔網4が処理液中に浸漬されるように案内する図示しない強制浸漬具が配設されている。また、船体2の船尾には、この船体2を移動させるためのスクリュ等の図示しない推進装置が配設されている。
【0028】
また、船体2の両側には、その両側部に沿って船尾まで延在する側部案内部材8,8が配設されており、さらに船体2の両側であって側部案内部材8より船首側には、側部前側案内部材9が配設されている。この側部前側案内部材9の近傍には、先端部が平面形状U字状に形成された前部案内部材10が図示しないワイヤの繰出し、巻取り動作により側部前側案内部材9に沿って前後に進退自在に取付けられている。この前部案内部材10は、ワイヤの動作により最も前方に延出された状態で、その前部案内部材10の先端部が船体2の船首部分から海中に没するようになされている。前部案内部材10の内側には、前後方向に延在する伸子棒引掛かり防止部材としての複数のガード部材11,11…が配設されており、さらに前部案内部材10の両基端部には、上下方向に延在する振れ防止部材12が一体に形成されている。この振れ防止部材12は、前部案内部材10の先端部が船体2の船首部分から海中に没するように延出された状態で、側部前側案内部材9の前方内側に当接し、この前部案内部材10の横方向への振れを防止するようになされている。
【0029】
さらに、刈取り機構6の前方には、海苔網4を刈取り機構6に案内するためのほぼ四角形状を有する伸子棒引掛かり防止部材としてのガード枠13がその後端側が高く位置するように傾斜して配設されており、このガード枠13には、前後方向に延在する複数のガード部材14,14…が配設されている。
【0030】
また、操舵室3の前部、上部および後部の両側には、操舵室3の周囲を取り囲むようにして後部案内部材15が配設されている。海苔網4はこの後部案内部材15の上方を通過することになる。
【0031】
船体2には、例えば、前記特許文献に記載されているように、処理液槽7による所定の処理を施した後の海苔網4をその処理に有効な時間だけ空中に浮上させた後に海苔網4を海面の展張位置へ導びいて再び展張させる伸縮自在な案内部材(前記特許文献1および2における後部案内部材参照)や、その他の公知の装備が設けられているが、説明を省略する。
【0032】
本実施形態においては、このように形成されている海苔作業船1に対して、本発明に従って、船の操船性を支援する操船支援手段をさらに設置している。
【0033】
本実施形態においては、この操船支援手段として、レーダー16と、カメラ17とカメラ用モニタ18との組み合わせと、少なくとも船体2の前方を照明する光源19と、自船の絶対位置を示すGPSシステム20と、少なくとも自船の位置の表示、進行航路案内の表示が可能なナビシステム21と、海苔網4に対する前記処理作業、自船の操船作業を自動的に実行させる自動操船システム22と、操舵室内の空調システム23と、構成各部を関連動作させる制御部24とを設けている。
【0034】
次に、これらの各操船支援手段をさらに説明する。
【0035】
本実施形態におけるレーダー16は、図1、図3および図4に示すように、従前は後部案内部材15の頂部より低い位置、即ち海苔網4に対する処理を施す場合を想定して、船上を通過する海苔網4より低い位置になるように高さ設定されていたものを、前記処理を施さない場合には海苔網4より高い位置まで伸びるように上下動自在に形成されている。具体的には、操舵室3の側部に配置されているレーダー16の支柱16aを上下方向に伸縮自在に形成してその頂部に水平に設けられているアンテナ部16bを後部案内部材15の頂部より低い位置から高い位置まで上下動自在に形成している。また、図3の破線に示すように、操舵室3の後方の船尾部に配置されているT字形状のレーダー16の支柱16aを起倒自在に形成して、当該支柱16aを倒れている状態から起立させることによりアンテナ部16bを後部案内部材15の頂部より低い位置から高い位置まで起倒自在とさせてもよい。
【0036】
前記カメラ17とカメラ用モニタ18との組み合わせは、図1、図3および図5に示すように、少なくとも船体2の前方を撮影するカメラ17を船体2の先端面に装着し、このカメラ17らからの撮影映像を表示するカメラ用モニタ18を操舵室3内に取付けて形成されている。
【0037】
前記光源19は、図1および図3に示すように、船体2の先端面の左右側に合計2個のヘッドライト19aを設け、船体2の先端部の左右のコーナー部分に一点照射型のサーチライト19Lと広域照射型のサーチライト19Rを設けて形成されている。光源19としては船体2の前方以外の部分を照射する他のライトを必要に応じて設置するとよい。
【0038】
前記GPSシステム20は、公知のシステムを利用するとよく、多用途アンテナ25を通して衛星からの情報を受信して自船の絶対位置を操舵室3内に設置した多用途モニタ26に表示するように形成されている。
【0039】
前記ナビシステム21は、公知のシステムを利用するとよく、GPSシステム20と連携して前記多用途モニタ26に少なくとも自船の位置および進行航路案内の表示ができるように形成されている。ナビシステム21は、その他に地図データベース、進行航路設定機能、外部通信網との送受信機能等の必要な装備を備えている。
【0040】
前記自動操船システム22は、海苔網4に対する前記処理作業や自船の操船作業を自動的に実行させるものであり、図5に示すように、船体2に搭載されている全部の可動部27に所定の動作を実行させる駆動源28と可動部27の動作を検出するセンサ29とを設け、制御部24によって自動運転指令を発して所定の動作を実行させるように形成されている。海苔網4に対する前記処理作業を行うための可動部27としては、刈取り機構6、処理液槽7への処理液供給機構(図示せず)、前部案内部材10等が挙げられる。自船の操船作業を行うための可動部としては、エンジン、舵、レーダー16、カメラ17、光源19、GPSシステム20、ナビシステム21等が挙げられる。駆動源28としては、油圧シリンダ、エアーシリンダ、モータ、ポンプ、スイッチ等の各種のアクチュエータが挙げられる。制御部24には、手動運転と自動運転とを切り替えることのできるモード選択スイッチ30が接続されており、また、自動運転を船体2の外から無人で実行するための運転制御用通信手段31が接続されている。
【0041】
前記空調システム23としては、操舵室3内の作業環境を良くするために設置されている。
【0042】
次に、本実施例における操船支援手段による作用を主として説明する。
【0043】
本実施形態の海苔作業船は、船の操船性を支援する操船支援手段を備えている
ことにより、操船支援手段を利用して海苔作業船を操船することができ、操船性の向上、操船環境の向上、安全性の向上等を図ることができ、ひいてはより一層高品質な海苔の採取が可能である。
【0044】
具体的には、海苔網4に対する処理を施している場合には船1上を通過する海苔網4より低い位置に設置され、前記処理を施さない場合には海苔網4より高い位置に設置される上下動自在若しくは起倒自在なレーダー16を用いると、前記処理を施さない場合にはレーダー16を海苔網4より高い位置、即ち後部案内部材15よりもアンテナ部16bを高い位置において操船することができるので、濃霧や夜間の視界不明な場合においてもレーダー16の受信精度が高くなり、その探知機能を十分に発揮させて安全に操船することができる。
【0045】
また、少なくとも船体2の前方を撮影するカメラ17と、このカメラ17らからの撮影映像を表示するカメラ用モニタ18との組み合わせを用いると、操舵室3内の作業員はモニタ18によって海苔網4の位置を確認しながら、船体2の舳先および海苔網4を掬い上げる前部前側案内部材10を海苔網4の幅方向の中央部分に適正に位置あわせして船体2を進行させることができる。これにより海苔網4に対する各種の作業(海苔の採取や処理液の付与等)を適正かつ容易に実行することができる。
【0046】
また、少なくとも船体2の前方を照明する光源19を用いると、夜間や濃霧の場合においても船体2の前方を明るく照明して船1を安全に操船することができる。また、レーダー16やカメラ17およびカメラ用モニタ18と組み合わせることにより、各部の機能が相乗的に作用して、夜間や濃霧の場合における操船性や各種の作業の正確性、効率性をより一層向上させることができる。特に、夜間作業を実行することにより、海苔が光合成を行わない夜間において、一日で最も高品質な黒い海苔を採取することができる。更に、海苔は夜間において細胞が収縮していて昼間より表面積が減少しているために、処理液槽7内を通過する海苔による処理液の消費量が相対的に減少し、少量の処理液による処理が可能となる。
【0047】
また、自船の絶対位置を示すGPSシステム20を用いると、自船の絶対位置を常に把握して操船や作業を実行することができる。
【0048】
また、少なくとも自船の位置の表示、進行航路案内の表示が可能なナビシステム21を用いると、表示された自船の位置や進行航路案内を目視によって確認しながら操船や作業を実行することができる。
【0049】
また、自動操船システム22を用いて海苔網4に対する前記処理作業や自船の操船作業を自動的に実行させる場合には、操舵室3内に作業員がいる際には、モード選択スイッチ30によって自動運転を選択し、無人で実行する際には、運転制御用通信手段31を通して運転指令を送信する。
【0050】
自動運転モードになると、制御部24から発せられる自動運転指令に従って船体2に搭載されている全部の可動部27の動作をセンサ29によって検出しながら駆動源28が可動部27を駆動して所定の動作を実行させる。これにより海苔網4に対する前記処理作業並びに自船の操船作業が自動運転される。
【0051】
作業員が操舵室3内にいる場合には、必要に応じて手動運転に切り替えるとよい。
【0052】
このように自動操船システム22を用いると、海苔作業船1の無人化を図ることができ、作業員による実作業を省略することができる。
【0053】
また、操舵室3内の空調システム23を用いると、操舵室3内の作業環境を(例えば、厳寒期に暖房を実行することにより)良好に保持することができ、作業員の作業の円滑性、正確性、効率性を図ることができる。
【0054】
また、本発明は前記実施の形態に限定されるものではなく、必要に応じて変更することができる。
【符号の説明】
【0055】
1 海苔作業船
2 船体
3 操舵室
4 海苔網
16 レーダー
17 カメラ
18 カメラ用モニタ
19 光源
20 GPSシステム
21 自動操船システム
23 空調システム
【特許請求の範囲】
【請求項1】
海苔養殖場に設置された海苔網に対して所定の処理を施す海苔作業船において、船の操船性を支援する操船支援手段を備えていることを特徴とする海苔作業船。
【請求項2】
前記操船支援手段は、
海苔網に対する処理を施している場合には船上を通過する海苔網より低い位置に設置され、前記処理を施さない場合には前記海苔網より高い位置に設置されるように上下動自在若しくは起倒自在なレーダーと、
少なくとも船体前方を撮影するカメラと、このカメラらからの撮影映像を表示するカメラ用モニタとの組み合わせと、
少なくとも船体前方を照明する光源と、
自船の絶対位置を示すGPSシステムと、
少なくとも自船の位置の表示、進行航路案内の表示が可能なナビシステムと、
海苔網に対する前記処理作業、自船の操船作業を自動的に実行させる自動操船システムと、
操舵室内の空調システムと
の1種若しくは複数種の組み合わせによって形成されていることを特徴とする請求項1に記載の海苔作業船。
【請求項1】
海苔養殖場に設置された海苔網に対して所定の処理を施す海苔作業船において、船の操船性を支援する操船支援手段を備えていることを特徴とする海苔作業船。
【請求項2】
前記操船支援手段は、
海苔網に対する処理を施している場合には船上を通過する海苔網より低い位置に設置され、前記処理を施さない場合には前記海苔網より高い位置に設置されるように上下動自在若しくは起倒自在なレーダーと、
少なくとも船体前方を撮影するカメラと、このカメラらからの撮影映像を表示するカメラ用モニタとの組み合わせと、
少なくとも船体前方を照明する光源と、
自船の絶対位置を示すGPSシステムと、
少なくとも自船の位置の表示、進行航路案内の表示が可能なナビシステムと、
海苔網に対する前記処理作業、自船の操船作業を自動的に実行させる自動操船システムと、
操舵室内の空調システムと
の1種若しくは複数種の組み合わせによって形成されていることを特徴とする請求項1に記載の海苔作業船。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2012−40889(P2012−40889A)
【公開日】平成24年3月1日(2012.3.1)
【国際特許分類】
【出願番号】特願2010−180879(P2010−180879)
【出願日】平成22年8月12日(2010.8.12)
【出願人】(000110882)ニチモウ株式会社 (52)
【Fターム(参考)】
【公開日】平成24年3月1日(2012.3.1)
【国際特許分類】
【出願日】平成22年8月12日(2010.8.12)
【出願人】(000110882)ニチモウ株式会社 (52)
【Fターム(参考)】
[ Back to top ]