
産業用ロボットのロボット制御装置
【課題】
産業用ロボットの消費電力量を抑制するためには、運転状況履歴とその運転状況履歴に合った累積消費電力とを照らし合わせて分析することが必要であるが、従来は、そのような分析可能なデータを提供する術がない。
【解決手段】
ロボット制御装置10は各種電気回路及びマニピュレータ30に供給される消費電力を検出する電力演算部23と、マニピュレータ30の稼働履歴に関連付けて、消費電力を記憶する記憶部12を備える。ロボット制御装置10は、指示された期間における累積消費電力の出力指令があった際に、指示された期間における記憶部12が記憶した稼働履歴と、稼働履歴と関連付けられた前記消費電力に基づいて累積消費電力を演算し、外部に接続したティーチペンダントTPへ出力するCPU11を備える。ロボットの運転状況を示す稼働履歴と消費電力とを照らし合わせて分析することができる。
産業用ロボットの消費電力量を抑制するためには、運転状況履歴とその運転状況履歴に合った累積消費電力とを照らし合わせて分析することが必要であるが、従来は、そのような分析可能なデータを提供する術がない。
【解決手段】
ロボット制御装置10は各種電気回路及びマニピュレータ30に供給される消費電力を検出する電力演算部23と、マニピュレータ30の稼働履歴に関連付けて、消費電力を記憶する記憶部12を備える。ロボット制御装置10は、指示された期間における累積消費電力の出力指令があった際に、指示された期間における記憶部12が記憶した稼働履歴と、稼働履歴と関連付けられた前記消費電力に基づいて累積消費電力を演算し、外部に接続したティーチペンダントTPへ出力するCPU11を備える。ロボットの運転状況を示す稼働履歴と消費電力とを照らし合わせて分析することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、消費電力をモニタできる産業用ロボットのロボット制御装置に関するものである。
【背景技術】
【0002】
従来から、産業用ロボットを管理するために、ロボット稼働情報を収集し、収集したロボット稼働情報を上位の遠隔管理端末へ送信するロボット制御装置が公知である(特許文献1)。前記ロボット稼働情報としては、ロボット状態情報及び外部制御機器情報が含まれている。前記ロボット稼働情報としてはロボットの動作速度、動作位置、アラーム状態、エラー状態が含まれている。又、前記外部制御機器情報には、ロボット制御装置に外部接続されたI/O制御機器のI/O制御状態、アラーム状態、エラー状態等が含まれている。このロボット稼働情報を上位の遠隔端末に送信してデータベース化することにより、ロボット管理を好適に行うことができる。
【0003】
一方、電気装置をモニタリングする消費電力モニタ装置としては、交流電源と負荷との間に電力検出手段を設けて、モニタリングすることが行われている(特許文献2,特許文献3)。
【0004】
特許文献2の消費電力モニタ装置では、交流電源と負荷との間に設けられたインバータ装置に対して、前記インバータ装置に流入する交流電力を前記交流電力検出手段によりモニタリングし、制御装置が前記モニタリング結果と初期データと基づいて節電量を演算してその節電量を表示するようにしている。
【0005】
特許文献3の消費電力モニタ装置では、交流電圧を整流し平滑する整流回路と、整流回路の電圧が供給されて1次側巻線の電流断続により2次側に所定電圧を発生する変圧回路と、前記変圧回路の1次側出力電圧のオンオフをスイッチングするスイッチング手段と、前記変圧回路の1次側電圧を調整する電圧調整手段とを備えている。そして、該消費電力モニタ装置は、電圧調整手段の出力に基づいて前記スイッチング手段のターンオン時間を算出し、該ターンオン時間、スイッチング手段のスイッチング周波数、変圧回路のインダクタンスに基づいて消費電力を測定する制御手段を備える。
【0006】
上記の従来技術の消費電力モニタ装置では、時々刻々と変化する消費電力量をモニタリングすることが可能である。そして、これらのモニタリング結果を利用することにより、電気機器の消費電力の節電を行うことが可能となる。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2003−103485号公報
【特許文献2】特開2001−4677号公報
【特許文献3】特開2004−101518号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
ところで、近年、地球温暖化に影響を与えるとされる温室効果ガス(二酸化炭素、メタン等)の排出量の抑制のために、電気装置の消費電力の抑制を行うことが求められている。このため、ロボット(マニピュレータ)及びロボット制御装置においても、消費電力量の抑制が行われることが望ましい。
【0009】
特許文献1では、前記ロボット稼働情報には、ロボット(マニピュレータ)及びロボット制御装置の消費電力は含まれておらず、又、その消費電力についての取得及び管理についても何ら開示されていない。
【0010】
なお、ロボット制御装置において、消費電力を時々刻々と変化する消費電力量のモニタリング自体は、上記のような従来技術により可能である。しかしながら、産業用ロボット及びロボット制御装置の消費電力量を抑制するためには、運転状況履歴とその運転状況履歴に合った累積消費電力とを照らし合わせて分析することが必要であるが、従来技術では、そのような分析可能なデータは提供されていない。
【0011】
本発明の目的は、ロボットの運転状況を示す稼働履歴と、累積消費電力とを照らし合わせて分析することができるロボット制御装置を提供することにある。
【課題を解決するための手段】
【0012】
上記問題点を解決するために、請求項1に記載の発明は、マニピュレータを制御する制御手段を備えたロボット制御装置であって、交流電源から、前記ロボット制御装置が搭載している各種電気回路及びマニピュレータに供給される消費電力を検出する電力検出手段と、前記マニピュレータの稼働履歴に関連付けて、前記電力検出手段が検出した消費電力を記憶する記憶手段と、指示された期間における累積消費電力の出力指令があった際に、前記指示された期間における前記記憶手段が記憶した前記稼働履歴と、該稼働履歴と関連付けられた前記消費電力に基づいて累積消費電力を演算し、外部に接続した外部装置へ出力する演算手段を備えることを特徴とするロボット制御装置を要旨としている。
【0013】
請求項2の発明は、請求項1において、前記交流電源が一次側に接続されるとともに、前記制御手段からの制御指令に基づいて二次側から前記マニピュレータが備えるサーボモータに電流を供給するサーボアンプと、前記サーボアンプの一次側に接続されたノイズ除去用のリアクトルを備え、前記電力検出手段は、前記リアクトルの両端電圧、及び前記リアクトルの既知の抵抗値に基づいて算出した電流値に基づいて電力を検出することを特徴とする。
【0014】
請求項3の発明は、請求項2において、前記外部装置が可搬式操作装置であり、前記演算手段は、前記可搬式操作装置に前記稼働履歴及び該稼働履歴と関連付けられた前記累積消費電力を出力することを特徴とする。
【0015】
請求項4の発明は、請求項2において、前記外部装置が当該ロボット制御装置を管理する上位の管理装置であり、前記演算手段は、前記管理装置に前記稼働履歴及び該稼働履歴と関連付けられた前記累積消費電力を出力することを特徴とする。
【0016】
請求項5の発明は、請求項2乃至請求項4のうちいずれか1項において、前記リアクトルは、コモンモードノイズを除去するコモンモードチョークコイルであることを特徴とする。
【0017】
請求項6の発明は、請求項2乃至請求項4のうちいずれか1項において、前記リアクトルは、高調波対策用のチョークコイルであることを特徴とする。
請求項7の発明は、請求項1乃至請求項6のうちいずれか1項において、前記演算手段は、測定開始指令に基づいて前記電力検出手段が検出した消費電力の積算を開始して、測定終了指令に基づいて消費電力の積算を終了し、測定開始指令と測定終了指令を入力した時刻間の稼働履歴とともに、積算した累積消費電力を外部装置へ出力することを特徴とする。
【発明の効果】
【0018】
請求項1の発明によれば、外部に接続された外部装置に対して、マニピュレータの稼働履歴及び該稼働履歴と関連付けられた消費電力を積算した累積消費電力を出力できるようにしたことによって、マニピュレータの運転状況を示す稼働履歴と、マニピュレータ及びロボット制御装置の累積消費電力とを照らし合わせて分析することができる。
【0019】
請求項2の発明によれば、ノイズ除去用のリアクトルをシャント抵抗とし、その両端電圧と該リアクトルの既知の抵抗値に基づいて該リアクトルに流れる電流値を算出して、前記測定値と該電流値により消費電力を検出する。一般的に、サーボアンプの一次側には、ノイズ除去用のリアクトルが設けられることが多く、このリアクトルをシャント抵抗としたことによって、新たなシャント抵抗を設ける必要がない。
【0020】
請求項3の発明によれば、マニピュレータの稼働履歴及び該稼働履歴と関連付けられたマニピュレータとロボット制御装置の累積消費電力が、可搬式操作装置に出力されるため、可搬式操作装置に一般的に備わっている表示手段等に、その稼働履歴と、マニピュレータ及びロボット制御装置の累積消費電力を表示することにより、両データを照らし合わせて分析することができる。
【0021】
請求項4の発明によれば、マニピュレータの稼働履歴及び該稼働履歴と関連付けられたマニピュレータとロボット制御装置の累積消費電力が、上位の管理装置に出力されるため、上位の管理装置に一般的に備わっている表示手段や印刷手段に、その稼働履歴と、マニピュレータ及びロボット制御装置の累積消費電力を出力することにより、両データを照らし合わせて分析することができる。
【0022】
請求項5の発明によれば、コモンモードノイズを除去するコモンモードチョークコイルを利用することにより、新たにシャント抵抗を設けることなく、マニピュレータとロボット制御装置の消費電力を検出することができる。
【0023】
請求項6の発明によれば、高調波ノイズを除去するチョークコイルを利用することにより、新たにシャント抵抗を設けることなく、マニピュレータとロボット制御装置の消費電力を検出することができる。
【0024】
請求項7の発明によれば、測定開始指令と測定終了指令を入力した時刻間の稼働履歴とともに、積算した累積消費電力を外部装置へ出力されるため、測定開始指令と測定終了指令を入力した時刻間の稼働履歴と累積消費電力のデータを照らし合わせて分析することができる。
【図面の簡単な説明】
【0025】
【図1】本発明を具体化した一実施形態のロボット制御装置のブロック図。
【図2】ティーチペンダントの概略正面図。
【図3】累積消費電力を表示したティーチペンダントの表示装置の表示画面の正面図。
【図4】累積消費電力を表示したティーチペンダントの表示装置の表示画面の正面図。
【図5】累積消費電力を表示したティーチペンダントの表示装置の表示画面の正面図。
【発明を実施するための形態】
【0026】
以下、本発明の産業ロボットのロボット制御装置10に具体化した一実施形態を図1〜図5を参照して説明する。
図1に示す、本実施形態のロボット制御装置10は、例えばアーク溶接ロボットを制御するロボット制御装置である。なお、ロボット制御装置は、アーク溶接ロボットを制御するロボット制御装置に限定されるものではなく、他の産業用ロボット、例えばハンドリングロボット、塗装ロボット、搬送ロボット等のロボット制御装置としてもよい。
【0027】
アーク溶接ロボットは、図示しない溶接トーチを備えた6軸のロボットマニピュレータ(以下、単にマニピュレータという)30であって、各軸を作動する図示しないサーボモータを備えている。
【0028】
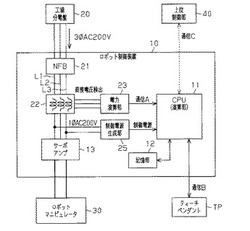
ロボット制御装置10は、制御手段及び演算手段としてのCPU(中央処理装置)11、及びCPU11に接続された記憶部12、マニピュレータ30の各軸のサーボモータにそれぞれモータ電流を供給するサーボアンプ13、ティーチペンダント用の通信インターフェイス(図示しない)並びに上位制御部(例えば、ホストコンピュータ)40と通信を行うための外部装置用のインターフェイス(図示しない)を備えている。上位制御部40は管理装置及び外部装置に相当する。なお、図1では、説明の便宜上、サーボアンプ13は、1つのみ図示しているが、マニピュレータ30の各軸毎にサーボアンプが設けられているものと理解されたい。
【0029】
記憶部12は、システムプログラムが格納されたROM、データの一時記憶用のRAM、及びマニピュレータ30の動作を定めた各種作業プログラムが格納された不揮発性メモリ、ハードディスク等の書き込み読出し可能な記憶装置を備えている。記憶部12は記憶手段に相当する。
【0030】
CPU11は、ティーチペンダントTPに対して前記ティーチペンダント用の通信インターフェイスを介して通信が可能である。ティーチペンダントTPは、外部装置及び可搬式操作装置に相当する。
【0031】
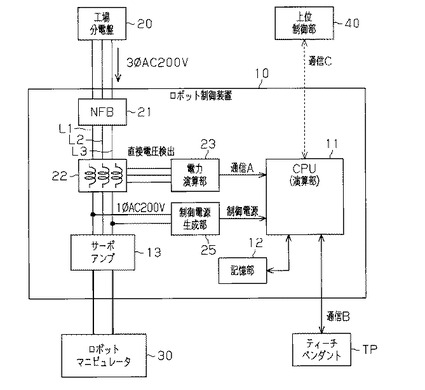
図2に示すようにティーチペンダントTPは、表示手段としてのモニタ表示部41と、キーや、押しボタン等の入力手段42を備えている。又、入力手段42には、測定開始キー42a及び測定終了キー42bが設けられている。
【0032】
ティーチペンダントTPは、プログラムデータの入力、修正、登録や、手動送り(ジョグ送り)指令、再生運転指令等のマニュアル入力に利用される。例えば、溶接条件(溶接電流、溶接電圧)等の教示データは、前記入力手段42を入力操作することにより、ロボット制御装置10に入力される。そして、CPU11は、入力された教示データを記憶部12に格納する。
【0033】
CPU11は、記憶部12に格納された作業プログラムに従い、各サーボアンプ13にマニピュレータ30を制御するための制御指令を出力する。
各サーボアンプ13の一次側は、工場の分電盤20に対して、NFB(ノーヒューズブレーカー)21と、コモンモードチョークコイル部22を介して接続されている。本実施形態では、分電盤20からは200Vの交流電圧がサーボアンプ13に印加されているが、電圧は限定されるものではない。分電盤20から供給されるAC電源は交流電源に相当する。
【0034】
サーボアンプ13は、工場の分電盤20から供給される三相交流をDC電源に変換するAC/DCコンバータと、前記AC/DCコンバータの出力電圧を平滑化する大容量の平滑用のコンデンサを備える。又、サーボアンプ13は、CPU11からの制御指令及び前記サーボモータの電流値等のフィードバック信号によってフィードバック制御することにより前記DC電源をAC電源に変換し、前記サーボモータにモータ電流を出力するインバータ(図示しない)を備える。AC/DCコンバータは、例えば三相ブリッジ接続された6個の整流素子から構成されている。インバータは、例えばブリッジ接続された6個の半導体のスイッチング素子から構成されている。
【0035】
コモンモードチョークコイル部22は、サーボアンプ13のAC/DCコンバータの入力側の各相の電力線L1〜L3において、図示しないフェライトコアにコモンモードチョークコイルが巻回されている。コモンモードチョークコイル部22により、各相において、ラインとGND間に発生するコモンモードノイズが抑制される。コモンモードチョークコイルはリアクトルに相当する。
【0036】
又、コモンモードチョークコイル部22とサーボアンプ13間において、二相間には、制御電源生成部25が接続されている。制御電源生成部25は交流直流変換を行い、ロボット制御装置10が搭載するCPU11、記憶部12、及び図示しないCPU11及び記憶部12以外の他の各種電気回路に対してDC電源として機能する。CPU11、記憶部12、及び図示しないCPU11及び記憶部12以外の他の各種電気回路は、本発明の各種電気回路に相当する。
【0037】
コモンモードチョークコイル部22において、各相のコモンモードチョークコイルの両端電圧は、電力演算部23にて検出される。電力演算部23は、電力検出手段に相当する。
【0038】
ロボット制御装置10及びマニピュレータ30の電源がオンされている状態では、電力演算部23は、所定の演算周期、例えば、数十msecで各相のコモンモードチョークコイルの既知の抵抗値と前記検出された電圧に基づいて、各相に流れる電流値を算出する。さらに電力演算部23は、この電流値と検出した電圧値とに基づいて、ロボット制御装置10及びマニピュレータ30に提供される消費電力を演算するようにしている。なお、コモンモードチョークコイルの抵抗値は、回路として組み込まれる前に測定されて、前記電力演算部23の図示しない記憶部に、予めパラメータとして記憶されている。
【0039】
(実施形態の作用)
さて、上記のように構成されたロボット制御装置10の作用を、図1〜図5を参照して説明する。
【0040】
ロボット制御装置10及びマニピュレータ30の電源がオンされている状態では、電力演算部23は、所定の演算周期(例えば、数十msec)で各相のコモンモードチョークコイルの既知の抵抗値と前記検出された電圧に基づいて、各相に流れる電流値を算出する。さらに電力演算部23は、この電流値と検出した電圧値とに基づいて、ロボット制御装置10及びマニピュレータ30に提供される消費電力を演算する。そして、算出した消費電力をCPU11に送信する(図1の通信A)。
【0041】
CPU11は、演算部として機能して、電力演算部23から送信された消費電力を、記憶部12に記憶し、図示しないタイマの計時とともに、すなわち時刻の経過とともに、計時された時刻と関連付けてその時々消費電力の履歴を記憶部12に記憶する。計時された時刻と関連付けされた消費電力が記憶されることにより、秒単位、分単位、時間単位、日単位、週単位、月単位、或いは、年間単位等の各種単位での積算が可能となり、すなわち累積消費電力の算出が可能となる。
【0042】
又、CPU11は、各種の作業プログラムに従って、マニピュレータ30により溶接を行ったとき、どの作業プログラムが使用されたかを示す使用した作業プログラム名と、前記タイマ(図示しない)の計時により、該作業プログラムがスタートした時刻と終了時刻、並びに、作業プログラムの起動回数を記憶部12に記憶する。
【0043】
作業プログラム名(すなわち、プログラム番号)、作業プログラムのスタートした時刻と終了時刻から得られる起動時間、作業プログラムの起動回数は、稼働履歴に相当する。
又、CPU11は、前記作業プログラムのステップに記述された溶接開始コマンドが出されたときの時刻と、溶接終了コマンドが出されたときの時刻を記憶部12に記憶する。このため、溶接時間の算出が可能となる。このことから、記憶部12に記憶したその時々の消費電力のデータベースから、前記溶接時間における累積消費電力の算出が可能となる。前記各コマンドの出されたときの時刻は稼働履歴に相当する。
【0044】
又、任意の日における任意の時刻間の累積消費電力を知りたい場合は、作業者は、ティーチペンダントTPの入力手段42を操作して、任意の日における任意の時刻間の累積消費電力の算出をCPU11に行わさせ、この算出結果をティーチペンダントTPのモニタ表示部41に表示させる。
【0045】
(具体的な表示例)
ここで、ティーチペンダントTPを使用して、モニタ表示部41に消費電力を表示させた具体例を説明する。
【0046】
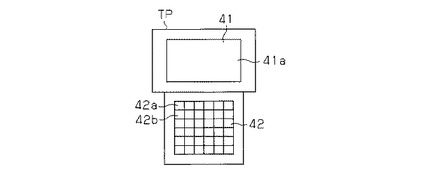
作業者が、入力手段42を操作して消費電力表示モードを選択し、知りたい期間を入力することにより、その期間の累積消費電力の出力を、ロボット制御装置10のCPU11に指令する(図1の通信B)。すると、CPU11は、記憶部12からその入力された期間(すなわち、作業者が知りたい期間)の各日における消費電力(累積消費電力)を演算し、その演算結果を、ティーチペンダントTPに送信する(図1の通信B)。ティーチペンダントTPでは、その演算結果を図3に示すように表示画面41a上に日別に表示を行う。なお、知りたい期間の入力は、指示された期間の累積消費電力の出力指令に相当する。
【0047】
図3は、ティーチペンダントTPのモニタ表示部41に日別に、当該日の消費電力(なお、図3〜図5で図示されている項目は説明の便宜上、累積消費電力を単に「消費電力」として図示されている。)を複数表示させている。図3に示すように、表示画面41aには、日付欄41bと、消費電力欄41cが表示され、各欄にそれぞれ稼働日と、その稼働日の消費電力(累積消費電力)が表示される。又、表示画面41aには、「詳細」と表示された領域41dが押しボタンとして設けられている。
【0048】
作業者がさらに表示画面41aに表示された特定の日の消費電力の詳細を知りたい場合は、知りたい日の表示領域を予め図示しないカーソルで選択した後、「詳細」と表示された領域41dを図示しないカーソルで選択して、押しボタンとして入力手段42により操作し、当該選択された知りたい日の詳細に関する処理の実行を指示する(図1の通信B)。CPU11は、この操作に応じてこの選択された日における詳細を表示するための処理を行う。
【0049】
ここで、「詳細」と表示された領域41dのボタンによる操作は、指示された期間の累積消費電力の出力指令に相当する。
すなわち、CPU11は、選択された日において、マニピュレータ30を稼働させた各種作業プログラムのプログラム名(プログラム番号)、起動回数、起動時間(すなわち、前記起動回数分を総合した起動時間)を読み出す。合わせてそれらの作業プログラムが起動していた前記起動時間における消費電力を積算して累積消費電力を算出する。又、CPU11は、前記選択された日において、作業プログラムが起動されていない待機中(待機時間中)の消費電力(累積消費電力)を算出する。
【0050】
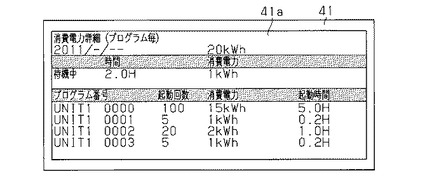
そして、CPU11は、読み出したデータ及び算出結果をティーチペンダントTPに送信する(図1の通信B)。ティーチペンダントTPでは、送信されたデータ及び演算結果を図4に示すように表示画面41a上に表示する。図4は、選択された日において、使用された複数の作業プログラムが実行されている時間中の、累積消費電力をモニタ表示部41に表示させた例である。
【0051】
又、作業者は、任意の日において、任意の計測時刻から任意の計測時間中における消費電力(累積消費電力)を知りたい場合には、ティーチペンダントTPの入力手段42を操作して、知りたい日、計測時刻、及び計測時間を入力し、知りたい日、計測時刻、及び計測時間に関するデータの読み出し出力及び算出処理の指令を送信する(図1の通信B)。ここで、知りたい日、計測時刻、及び計測時間の入力は、指示された期間の累積消費電力の出力指令に相当する。
【0052】
CPU11は、その入力された日、計測時刻、計測時間に基づいて、記憶部12から該当するデータを読み出すとともに、消費電力を積算し累積消費電力を算出する。そして、CPU11は、算出結果をティーチペンダントTPに送信する(図1の通信B)。ティーチペンダントTPでは、送信されたデータ及び演算結果を図5に示すように表示画面41a上に表示する。
【0053】
又、CPU11は、外部装置としての上位制御部40に対して、ティーチペンダントTPに送信した上記と同様の各種データを送信する(図1の通信C)。上位制御部40では、受信した前記各種データに基づいて管理装置として累積消費電力の管理を行う。
【0054】
上記のようにして、ロボット制御装置10には、稼働履歴及び消費電力のデータは、内部データとして記憶部12に保存され、作業者が任意の時期に取り出すことが可能である。
【0055】
又、作業者は、ティーチペンダントTPの入力手段42の測定開始キー42aをオン操作して、ロボット制御装置10のCPU11がその測定開始キー42aのオン信号を入力すると、CPU11は、電力演算部23が検出した消費電力の積算を開始する。そして、作業者は、ティーチペンダントTPの入力手段42の測定終了キー42bをオン操作して、ロボット制御装置10のCPU11がその測定終了キー42bのオン信号を入力すると、CPU11は、電力演算部23が検出した消費電力の積算を終了する。
【0056】
又、CPU11は、測定開始キー42aのオン信号(測定開始指令に相当する)を入力したときから測定終了キー42bのオン信号(測定終了指令に相当する)を入力した時までに作業プログラムが稼働していた場合には、作業プログラム名(すなわち、プログラム番号)、作業プログラムのスタートした時刻と終了時刻から得られる起動時間、作業プログラムの起動回数等の稼働履歴を記憶部12に記憶する。
【0057】
そして、CPU11は、消費電力の積算を終了した後、その累積消費電力とともに、記憶部12に記憶した稼働履歴を、ティーチペンダントTPに送信する。ティーチペンダントTPは、モニタ表示部41に送信された測定開始から測定終了までの稼働履歴と、累積消費電力をモニタ表示部41に表示する。
【0058】
この場合、作業者が任意の測定開始時刻から任意の測定終了時刻までの稼働履歴と、その間の累積消費電力とを照らし合わせて分析が可能である。
本実施形態のロボット制御装置10によれば、下記の特徴がある。
【0059】
(1) 本実施形態のロボット制御装置10は、交流電源から、ロボット制御装置10が搭載している各種電気回路及びマニピュレータ30に供給される消費電力を検出する電力演算部23(電力検出手段)と、マニピュレータ30の稼働履歴に関連付けて、電力演算部23(電力検出手段)が検出した消費電力を記憶する記憶部12(記憶手段)を備える。又、ロボット制御装置10は、指示された期間における累積消費電力の出力指令があった際に、指示された期間における記憶部12が記憶した稼働履歴と、稼働履歴と関連付けられた前記消費電力に基づいて累積消費電力を演算し、外部に接続したティーチペンダントTP(外部装置)へ出力するCPU11(演算手段)を備える。
【0060】
この結果、本実施形態では、CPU11が外部に接続されたティーチペンダントTPに対して、マニピュレータ30の稼働履歴及び該稼働履歴と関連付けられた消費電力を積算した累積消費電力を出力できるため、マニピュレータの運転状況を示す稼働履歴と、マニピュレータ及びロボット制御装置の消費電力とを照らし合わせて分析できる。
【0061】
すなわち、日々自動的に取得されるデータに基づいて、工場内の継続的な累積消費電力の管理を行うことが可能となる。
(2) 本実施形態のロボット制御装置10は、交流電源が一次側に接続されるとともに、CPU11(制御手段)からの制御指令に基づいて二次側からマニピュレータ30が備えるサーボモータに電流を供給するサーボアンプ13と、サーボアンプ13の一次側に接続されたノイズ除去用のコモンモードチョークコイル(リアクトル)を備えている。
【0062】
又、電力演算部23(電力検出手段)は、コモンモードチョークコイル(リアクトル)の両端電圧、及びコモンモードチョークコイル(リアクトル)の既知の抵抗値に基づいて算出した電流値に基づいて電力を検出する。
【0063】
この結果、本実施形態によれば、コモンモードノイズ除去用のリアクトルをシャント抵抗とし、その両端電圧と該コモンモードチョークコイルの既知の抵抗値に基づいて該コモンモードチョークコイルに流れる電流値を算出して、前記測定値と該電流値により消費電力を検出する。一般的に、サーボアンプの一次側には、ノイズ除去用のリアクトルが設けられることが多く、このリアクトルをシャント抵抗とするため、新たなシャント抵抗を設ける必要がない。
【0064】
特にロボット制御装置では、コモンモードチョークコイルが、標準的構成としてサーボアンプの一次側に設けられている。本実施形態によれば、コモンモードノイズを除去するコモンモードチョークコイルを利用することにより、新たにシャント抵抗を設けることなく、マニピュレータとロボット制御装置の消費電力を検出できる。
【0065】
(3) 本実施形態のロボット制御装置10のCPU11(演算手段)は、ティーチペンダントTP(可搬式操作装置)に稼働履歴及び該稼働履歴と関連付けられた累積消費電力を出力する。この結果、本実施形態では、マニピュレータ30の稼働履歴及び該稼働履歴と関連付けられたマニピュレータ30とロボット制御装置10の累積消費電力が、ティーチペンダントTPに出力される。このため、ティーチペンダントTPに一般的に備わっているモニタ表示部41(表示手段)に、その稼働履歴と、マニピュレータ30及びロボット制御装置10の累積消費電力を表示することにより、両データを照らし合わせて分析できる。
【0066】
(4) 本実施形態のロボット制御装置10のCPU11(演算手段)は、上位制御部40(管理装置)に稼働履歴及び該稼働履歴と関連付けられた累積消費電力を出力するようにした。この結果、本実施形態によれば、マニピュレータ30の稼働履歴及び該稼働履歴と関連付けられたマニピュレータ30とロボット制御装置10の累積消費電力が、上位制御部40(管理装置)に出力される。このため、上位制御部40に一般的に備わっている表示装置(表示手段)やプリンタ(印刷手段)に、その稼働履歴と、マニピュレータ30及びロボット制御装置10の累積消費電力を出力することにより、両データを照らし合わせて分析できる。
【0067】
又、ロボット制御装置10の上位制御部40がもつ通信ネットワークを活用すれば、工場内の複数のロボット制御装置及び複数のマニピュレータの累積消費電力の見える化も可能となり、温室効果ガスの排出取引に不可欠な節電量の継続的なモニタリングが無理なく行うことが可能となる。
【0068】
(5) 本実施形態のロボット制御装置10のCPU11(演算手段)は、測定開始キー42aのオン信号(測定開始指令)に基づいて前記電力検出手段が検出した消費電力の積算を開始して、測定終了キー42bのオン信号(測定終了指令)に基づいて消費電力の積算を終了する。そして、測定開始キー42aのオン信号と測定終了キー42bのオン信号を入力した時刻間の稼働履歴とともに、積算した累積消費電力をティーチペンダントTPへ出力する。
【0069】
この結果、本実施形態によれば、作業者が任意の測定開始時刻から任意の測定終了時刻までの稼働履歴と、その間の累積消費電力とを照らし合わせて分析ができる。
なお、本発明は前記実施形態に限定されるものではなく、下記のように構成してもよい。
【0070】
・ 前記実施形態では、溶接開始コマンド、溶接終了コマンドのそれぞれの時刻を記憶するようにしたが、稼働履歴はこれらのコマンドに限定するものではなく、マニピュレータ30を動作させるための他のコマンドを稼働履歴として記録するようにしてもよい。そして、任意のコマンド間の作業時間における累積消費電力をティーチペンダントTPや、或いは上位制御部40に送信(図1の通信C)するようにしてもよい。
【0071】
・ 前記実施形態では、コモンモードチョークコイル部22を設けたが、コモンモードチョークコイル部22の代わりに、コモンモードチョークコイル部22の接続位置において高調波ノイズを除去するチョークコイル部を設けるようにしてもよい。この場合、チョークコイル部は、各相の電力線L1〜L3にチョークコイルを接続することにより構成する。この各相に設けたチョークコイルの両端電圧を、前記実施形態と同様に電力演算部23にて検出し、消費電力を同様に算出するようにしてもよい。この場合、チョークコイルの抵抗値をパラメータとして、電力演算部23は、図示しない記憶部に記憶しておくものとする。
【0072】
・ 前記実施形態では、外部装置として、ティーチペンダントTP及び上位制御部40をロボット制御装置10に接続したが、いずれか一方の接続を省略してもよい。
【符号の説明】
【0073】
10…ロボット制御装置、11…CPU(制御手段、演算手段)、
13…サーボアンプ、22…コモンモードチョークコイル部、
23…電力演算部(電力検出手段)、20…分電盤、
30…マニピュレータ、40…上位制御部(外部装置)、
42…入力手段、42a…測定開始キー、42b…測定終了キー、
TP…ティーチペンダント。
【技術分野】
【0001】
本発明は、消費電力をモニタできる産業用ロボットのロボット制御装置に関するものである。
【背景技術】
【0002】
従来から、産業用ロボットを管理するために、ロボット稼働情報を収集し、収集したロボット稼働情報を上位の遠隔管理端末へ送信するロボット制御装置が公知である(特許文献1)。前記ロボット稼働情報としては、ロボット状態情報及び外部制御機器情報が含まれている。前記ロボット稼働情報としてはロボットの動作速度、動作位置、アラーム状態、エラー状態が含まれている。又、前記外部制御機器情報には、ロボット制御装置に外部接続されたI/O制御機器のI/O制御状態、アラーム状態、エラー状態等が含まれている。このロボット稼働情報を上位の遠隔端末に送信してデータベース化することにより、ロボット管理を好適に行うことができる。
【0003】
一方、電気装置をモニタリングする消費電力モニタ装置としては、交流電源と負荷との間に電力検出手段を設けて、モニタリングすることが行われている(特許文献2,特許文献3)。
【0004】
特許文献2の消費電力モニタ装置では、交流電源と負荷との間に設けられたインバータ装置に対して、前記インバータ装置に流入する交流電力を前記交流電力検出手段によりモニタリングし、制御装置が前記モニタリング結果と初期データと基づいて節電量を演算してその節電量を表示するようにしている。
【0005】
特許文献3の消費電力モニタ装置では、交流電圧を整流し平滑する整流回路と、整流回路の電圧が供給されて1次側巻線の電流断続により2次側に所定電圧を発生する変圧回路と、前記変圧回路の1次側出力電圧のオンオフをスイッチングするスイッチング手段と、前記変圧回路の1次側電圧を調整する電圧調整手段とを備えている。そして、該消費電力モニタ装置は、電圧調整手段の出力に基づいて前記スイッチング手段のターンオン時間を算出し、該ターンオン時間、スイッチング手段のスイッチング周波数、変圧回路のインダクタンスに基づいて消費電力を測定する制御手段を備える。
【0006】
上記の従来技術の消費電力モニタ装置では、時々刻々と変化する消費電力量をモニタリングすることが可能である。そして、これらのモニタリング結果を利用することにより、電気機器の消費電力の節電を行うことが可能となる。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2003−103485号公報
【特許文献2】特開2001−4677号公報
【特許文献3】特開2004−101518号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
ところで、近年、地球温暖化に影響を与えるとされる温室効果ガス(二酸化炭素、メタン等)の排出量の抑制のために、電気装置の消費電力の抑制を行うことが求められている。このため、ロボット(マニピュレータ)及びロボット制御装置においても、消費電力量の抑制が行われることが望ましい。
【0009】
特許文献1では、前記ロボット稼働情報には、ロボット(マニピュレータ)及びロボット制御装置の消費電力は含まれておらず、又、その消費電力についての取得及び管理についても何ら開示されていない。
【0010】
なお、ロボット制御装置において、消費電力を時々刻々と変化する消費電力量のモニタリング自体は、上記のような従来技術により可能である。しかしながら、産業用ロボット及びロボット制御装置の消費電力量を抑制するためには、運転状況履歴とその運転状況履歴に合った累積消費電力とを照らし合わせて分析することが必要であるが、従来技術では、そのような分析可能なデータは提供されていない。
【0011】
本発明の目的は、ロボットの運転状況を示す稼働履歴と、累積消費電力とを照らし合わせて分析することができるロボット制御装置を提供することにある。
【課題を解決するための手段】
【0012】
上記問題点を解決するために、請求項1に記載の発明は、マニピュレータを制御する制御手段を備えたロボット制御装置であって、交流電源から、前記ロボット制御装置が搭載している各種電気回路及びマニピュレータに供給される消費電力を検出する電力検出手段と、前記マニピュレータの稼働履歴に関連付けて、前記電力検出手段が検出した消費電力を記憶する記憶手段と、指示された期間における累積消費電力の出力指令があった際に、前記指示された期間における前記記憶手段が記憶した前記稼働履歴と、該稼働履歴と関連付けられた前記消費電力に基づいて累積消費電力を演算し、外部に接続した外部装置へ出力する演算手段を備えることを特徴とするロボット制御装置を要旨としている。
【0013】
請求項2の発明は、請求項1において、前記交流電源が一次側に接続されるとともに、前記制御手段からの制御指令に基づいて二次側から前記マニピュレータが備えるサーボモータに電流を供給するサーボアンプと、前記サーボアンプの一次側に接続されたノイズ除去用のリアクトルを備え、前記電力検出手段は、前記リアクトルの両端電圧、及び前記リアクトルの既知の抵抗値に基づいて算出した電流値に基づいて電力を検出することを特徴とする。
【0014】
請求項3の発明は、請求項2において、前記外部装置が可搬式操作装置であり、前記演算手段は、前記可搬式操作装置に前記稼働履歴及び該稼働履歴と関連付けられた前記累積消費電力を出力することを特徴とする。
【0015】
請求項4の発明は、請求項2において、前記外部装置が当該ロボット制御装置を管理する上位の管理装置であり、前記演算手段は、前記管理装置に前記稼働履歴及び該稼働履歴と関連付けられた前記累積消費電力を出力することを特徴とする。
【0016】
請求項5の発明は、請求項2乃至請求項4のうちいずれか1項において、前記リアクトルは、コモンモードノイズを除去するコモンモードチョークコイルであることを特徴とする。
【0017】
請求項6の発明は、請求項2乃至請求項4のうちいずれか1項において、前記リアクトルは、高調波対策用のチョークコイルであることを特徴とする。
請求項7の発明は、請求項1乃至請求項6のうちいずれか1項において、前記演算手段は、測定開始指令に基づいて前記電力検出手段が検出した消費電力の積算を開始して、測定終了指令に基づいて消費電力の積算を終了し、測定開始指令と測定終了指令を入力した時刻間の稼働履歴とともに、積算した累積消費電力を外部装置へ出力することを特徴とする。
【発明の効果】
【0018】
請求項1の発明によれば、外部に接続された外部装置に対して、マニピュレータの稼働履歴及び該稼働履歴と関連付けられた消費電力を積算した累積消費電力を出力できるようにしたことによって、マニピュレータの運転状況を示す稼働履歴と、マニピュレータ及びロボット制御装置の累積消費電力とを照らし合わせて分析することができる。
【0019】
請求項2の発明によれば、ノイズ除去用のリアクトルをシャント抵抗とし、その両端電圧と該リアクトルの既知の抵抗値に基づいて該リアクトルに流れる電流値を算出して、前記測定値と該電流値により消費電力を検出する。一般的に、サーボアンプの一次側には、ノイズ除去用のリアクトルが設けられることが多く、このリアクトルをシャント抵抗としたことによって、新たなシャント抵抗を設ける必要がない。
【0020】
請求項3の発明によれば、マニピュレータの稼働履歴及び該稼働履歴と関連付けられたマニピュレータとロボット制御装置の累積消費電力が、可搬式操作装置に出力されるため、可搬式操作装置に一般的に備わっている表示手段等に、その稼働履歴と、マニピュレータ及びロボット制御装置の累積消費電力を表示することにより、両データを照らし合わせて分析することができる。
【0021】
請求項4の発明によれば、マニピュレータの稼働履歴及び該稼働履歴と関連付けられたマニピュレータとロボット制御装置の累積消費電力が、上位の管理装置に出力されるため、上位の管理装置に一般的に備わっている表示手段や印刷手段に、その稼働履歴と、マニピュレータ及びロボット制御装置の累積消費電力を出力することにより、両データを照らし合わせて分析することができる。
【0022】
請求項5の発明によれば、コモンモードノイズを除去するコモンモードチョークコイルを利用することにより、新たにシャント抵抗を設けることなく、マニピュレータとロボット制御装置の消費電力を検出することができる。
【0023】
請求項6の発明によれば、高調波ノイズを除去するチョークコイルを利用することにより、新たにシャント抵抗を設けることなく、マニピュレータとロボット制御装置の消費電力を検出することができる。
【0024】
請求項7の発明によれば、測定開始指令と測定終了指令を入力した時刻間の稼働履歴とともに、積算した累積消費電力を外部装置へ出力されるため、測定開始指令と測定終了指令を入力した時刻間の稼働履歴と累積消費電力のデータを照らし合わせて分析することができる。
【図面の簡単な説明】
【0025】
【図1】本発明を具体化した一実施形態のロボット制御装置のブロック図。
【図2】ティーチペンダントの概略正面図。
【図3】累積消費電力を表示したティーチペンダントの表示装置の表示画面の正面図。
【図4】累積消費電力を表示したティーチペンダントの表示装置の表示画面の正面図。
【図5】累積消費電力を表示したティーチペンダントの表示装置の表示画面の正面図。
【発明を実施するための形態】
【0026】
以下、本発明の産業ロボットのロボット制御装置10に具体化した一実施形態を図1〜図5を参照して説明する。
図1に示す、本実施形態のロボット制御装置10は、例えばアーク溶接ロボットを制御するロボット制御装置である。なお、ロボット制御装置は、アーク溶接ロボットを制御するロボット制御装置に限定されるものではなく、他の産業用ロボット、例えばハンドリングロボット、塗装ロボット、搬送ロボット等のロボット制御装置としてもよい。
【0027】
アーク溶接ロボットは、図示しない溶接トーチを備えた6軸のロボットマニピュレータ(以下、単にマニピュレータという)30であって、各軸を作動する図示しないサーボモータを備えている。
【0028】
ロボット制御装置10は、制御手段及び演算手段としてのCPU(中央処理装置)11、及びCPU11に接続された記憶部12、マニピュレータ30の各軸のサーボモータにそれぞれモータ電流を供給するサーボアンプ13、ティーチペンダント用の通信インターフェイス(図示しない)並びに上位制御部(例えば、ホストコンピュータ)40と通信を行うための外部装置用のインターフェイス(図示しない)を備えている。上位制御部40は管理装置及び外部装置に相当する。なお、図1では、説明の便宜上、サーボアンプ13は、1つのみ図示しているが、マニピュレータ30の各軸毎にサーボアンプが設けられているものと理解されたい。
【0029】
記憶部12は、システムプログラムが格納されたROM、データの一時記憶用のRAM、及びマニピュレータ30の動作を定めた各種作業プログラムが格納された不揮発性メモリ、ハードディスク等の書き込み読出し可能な記憶装置を備えている。記憶部12は記憶手段に相当する。
【0030】
CPU11は、ティーチペンダントTPに対して前記ティーチペンダント用の通信インターフェイスを介して通信が可能である。ティーチペンダントTPは、外部装置及び可搬式操作装置に相当する。
【0031】
図2に示すようにティーチペンダントTPは、表示手段としてのモニタ表示部41と、キーや、押しボタン等の入力手段42を備えている。又、入力手段42には、測定開始キー42a及び測定終了キー42bが設けられている。
【0032】
ティーチペンダントTPは、プログラムデータの入力、修正、登録や、手動送り(ジョグ送り)指令、再生運転指令等のマニュアル入力に利用される。例えば、溶接条件(溶接電流、溶接電圧)等の教示データは、前記入力手段42を入力操作することにより、ロボット制御装置10に入力される。そして、CPU11は、入力された教示データを記憶部12に格納する。
【0033】
CPU11は、記憶部12に格納された作業プログラムに従い、各サーボアンプ13にマニピュレータ30を制御するための制御指令を出力する。
各サーボアンプ13の一次側は、工場の分電盤20に対して、NFB(ノーヒューズブレーカー)21と、コモンモードチョークコイル部22を介して接続されている。本実施形態では、分電盤20からは200Vの交流電圧がサーボアンプ13に印加されているが、電圧は限定されるものではない。分電盤20から供給されるAC電源は交流電源に相当する。
【0034】
サーボアンプ13は、工場の分電盤20から供給される三相交流をDC電源に変換するAC/DCコンバータと、前記AC/DCコンバータの出力電圧を平滑化する大容量の平滑用のコンデンサを備える。又、サーボアンプ13は、CPU11からの制御指令及び前記サーボモータの電流値等のフィードバック信号によってフィードバック制御することにより前記DC電源をAC電源に変換し、前記サーボモータにモータ電流を出力するインバータ(図示しない)を備える。AC/DCコンバータは、例えば三相ブリッジ接続された6個の整流素子から構成されている。インバータは、例えばブリッジ接続された6個の半導体のスイッチング素子から構成されている。
【0035】
コモンモードチョークコイル部22は、サーボアンプ13のAC/DCコンバータの入力側の各相の電力線L1〜L3において、図示しないフェライトコアにコモンモードチョークコイルが巻回されている。コモンモードチョークコイル部22により、各相において、ラインとGND間に発生するコモンモードノイズが抑制される。コモンモードチョークコイルはリアクトルに相当する。
【0036】
又、コモンモードチョークコイル部22とサーボアンプ13間において、二相間には、制御電源生成部25が接続されている。制御電源生成部25は交流直流変換を行い、ロボット制御装置10が搭載するCPU11、記憶部12、及び図示しないCPU11及び記憶部12以外の他の各種電気回路に対してDC電源として機能する。CPU11、記憶部12、及び図示しないCPU11及び記憶部12以外の他の各種電気回路は、本発明の各種電気回路に相当する。
【0037】
コモンモードチョークコイル部22において、各相のコモンモードチョークコイルの両端電圧は、電力演算部23にて検出される。電力演算部23は、電力検出手段に相当する。
【0038】
ロボット制御装置10及びマニピュレータ30の電源がオンされている状態では、電力演算部23は、所定の演算周期、例えば、数十msecで各相のコモンモードチョークコイルの既知の抵抗値と前記検出された電圧に基づいて、各相に流れる電流値を算出する。さらに電力演算部23は、この電流値と検出した電圧値とに基づいて、ロボット制御装置10及びマニピュレータ30に提供される消費電力を演算するようにしている。なお、コモンモードチョークコイルの抵抗値は、回路として組み込まれる前に測定されて、前記電力演算部23の図示しない記憶部に、予めパラメータとして記憶されている。
【0039】
(実施形態の作用)
さて、上記のように構成されたロボット制御装置10の作用を、図1〜図5を参照して説明する。
【0040】
ロボット制御装置10及びマニピュレータ30の電源がオンされている状態では、電力演算部23は、所定の演算周期(例えば、数十msec)で各相のコモンモードチョークコイルの既知の抵抗値と前記検出された電圧に基づいて、各相に流れる電流値を算出する。さらに電力演算部23は、この電流値と検出した電圧値とに基づいて、ロボット制御装置10及びマニピュレータ30に提供される消費電力を演算する。そして、算出した消費電力をCPU11に送信する(図1の通信A)。
【0041】
CPU11は、演算部として機能して、電力演算部23から送信された消費電力を、記憶部12に記憶し、図示しないタイマの計時とともに、すなわち時刻の経過とともに、計時された時刻と関連付けてその時々消費電力の履歴を記憶部12に記憶する。計時された時刻と関連付けされた消費電力が記憶されることにより、秒単位、分単位、時間単位、日単位、週単位、月単位、或いは、年間単位等の各種単位での積算が可能となり、すなわち累積消費電力の算出が可能となる。
【0042】
又、CPU11は、各種の作業プログラムに従って、マニピュレータ30により溶接を行ったとき、どの作業プログラムが使用されたかを示す使用した作業プログラム名と、前記タイマ(図示しない)の計時により、該作業プログラムがスタートした時刻と終了時刻、並びに、作業プログラムの起動回数を記憶部12に記憶する。
【0043】
作業プログラム名(すなわち、プログラム番号)、作業プログラムのスタートした時刻と終了時刻から得られる起動時間、作業プログラムの起動回数は、稼働履歴に相当する。
又、CPU11は、前記作業プログラムのステップに記述された溶接開始コマンドが出されたときの時刻と、溶接終了コマンドが出されたときの時刻を記憶部12に記憶する。このため、溶接時間の算出が可能となる。このことから、記憶部12に記憶したその時々の消費電力のデータベースから、前記溶接時間における累積消費電力の算出が可能となる。前記各コマンドの出されたときの時刻は稼働履歴に相当する。
【0044】
又、任意の日における任意の時刻間の累積消費電力を知りたい場合は、作業者は、ティーチペンダントTPの入力手段42を操作して、任意の日における任意の時刻間の累積消費電力の算出をCPU11に行わさせ、この算出結果をティーチペンダントTPのモニタ表示部41に表示させる。
【0045】
(具体的な表示例)
ここで、ティーチペンダントTPを使用して、モニタ表示部41に消費電力を表示させた具体例を説明する。
【0046】
作業者が、入力手段42を操作して消費電力表示モードを選択し、知りたい期間を入力することにより、その期間の累積消費電力の出力を、ロボット制御装置10のCPU11に指令する(図1の通信B)。すると、CPU11は、記憶部12からその入力された期間(すなわち、作業者が知りたい期間)の各日における消費電力(累積消費電力)を演算し、その演算結果を、ティーチペンダントTPに送信する(図1の通信B)。ティーチペンダントTPでは、その演算結果を図3に示すように表示画面41a上に日別に表示を行う。なお、知りたい期間の入力は、指示された期間の累積消費電力の出力指令に相当する。
【0047】
図3は、ティーチペンダントTPのモニタ表示部41に日別に、当該日の消費電力(なお、図3〜図5で図示されている項目は説明の便宜上、累積消費電力を単に「消費電力」として図示されている。)を複数表示させている。図3に示すように、表示画面41aには、日付欄41bと、消費電力欄41cが表示され、各欄にそれぞれ稼働日と、その稼働日の消費電力(累積消費電力)が表示される。又、表示画面41aには、「詳細」と表示された領域41dが押しボタンとして設けられている。
【0048】
作業者がさらに表示画面41aに表示された特定の日の消費電力の詳細を知りたい場合は、知りたい日の表示領域を予め図示しないカーソルで選択した後、「詳細」と表示された領域41dを図示しないカーソルで選択して、押しボタンとして入力手段42により操作し、当該選択された知りたい日の詳細に関する処理の実行を指示する(図1の通信B)。CPU11は、この操作に応じてこの選択された日における詳細を表示するための処理を行う。
【0049】
ここで、「詳細」と表示された領域41dのボタンによる操作は、指示された期間の累積消費電力の出力指令に相当する。
すなわち、CPU11は、選択された日において、マニピュレータ30を稼働させた各種作業プログラムのプログラム名(プログラム番号)、起動回数、起動時間(すなわち、前記起動回数分を総合した起動時間)を読み出す。合わせてそれらの作業プログラムが起動していた前記起動時間における消費電力を積算して累積消費電力を算出する。又、CPU11は、前記選択された日において、作業プログラムが起動されていない待機中(待機時間中)の消費電力(累積消費電力)を算出する。
【0050】
そして、CPU11は、読み出したデータ及び算出結果をティーチペンダントTPに送信する(図1の通信B)。ティーチペンダントTPでは、送信されたデータ及び演算結果を図4に示すように表示画面41a上に表示する。図4は、選択された日において、使用された複数の作業プログラムが実行されている時間中の、累積消費電力をモニタ表示部41に表示させた例である。
【0051】
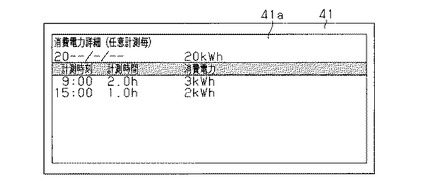
又、作業者は、任意の日において、任意の計測時刻から任意の計測時間中における消費電力(累積消費電力)を知りたい場合には、ティーチペンダントTPの入力手段42を操作して、知りたい日、計測時刻、及び計測時間を入力し、知りたい日、計測時刻、及び計測時間に関するデータの読み出し出力及び算出処理の指令を送信する(図1の通信B)。ここで、知りたい日、計測時刻、及び計測時間の入力は、指示された期間の累積消費電力の出力指令に相当する。
【0052】
CPU11は、その入力された日、計測時刻、計測時間に基づいて、記憶部12から該当するデータを読み出すとともに、消費電力を積算し累積消費電力を算出する。そして、CPU11は、算出結果をティーチペンダントTPに送信する(図1の通信B)。ティーチペンダントTPでは、送信されたデータ及び演算結果を図5に示すように表示画面41a上に表示する。
【0053】
又、CPU11は、外部装置としての上位制御部40に対して、ティーチペンダントTPに送信した上記と同様の各種データを送信する(図1の通信C)。上位制御部40では、受信した前記各種データに基づいて管理装置として累積消費電力の管理を行う。
【0054】
上記のようにして、ロボット制御装置10には、稼働履歴及び消費電力のデータは、内部データとして記憶部12に保存され、作業者が任意の時期に取り出すことが可能である。
【0055】
又、作業者は、ティーチペンダントTPの入力手段42の測定開始キー42aをオン操作して、ロボット制御装置10のCPU11がその測定開始キー42aのオン信号を入力すると、CPU11は、電力演算部23が検出した消費電力の積算を開始する。そして、作業者は、ティーチペンダントTPの入力手段42の測定終了キー42bをオン操作して、ロボット制御装置10のCPU11がその測定終了キー42bのオン信号を入力すると、CPU11は、電力演算部23が検出した消費電力の積算を終了する。
【0056】
又、CPU11は、測定開始キー42aのオン信号(測定開始指令に相当する)を入力したときから測定終了キー42bのオン信号(測定終了指令に相当する)を入力した時までに作業プログラムが稼働していた場合には、作業プログラム名(すなわち、プログラム番号)、作業プログラムのスタートした時刻と終了時刻から得られる起動時間、作業プログラムの起動回数等の稼働履歴を記憶部12に記憶する。
【0057】
そして、CPU11は、消費電力の積算を終了した後、その累積消費電力とともに、記憶部12に記憶した稼働履歴を、ティーチペンダントTPに送信する。ティーチペンダントTPは、モニタ表示部41に送信された測定開始から測定終了までの稼働履歴と、累積消費電力をモニタ表示部41に表示する。
【0058】
この場合、作業者が任意の測定開始時刻から任意の測定終了時刻までの稼働履歴と、その間の累積消費電力とを照らし合わせて分析が可能である。
本実施形態のロボット制御装置10によれば、下記の特徴がある。
【0059】
(1) 本実施形態のロボット制御装置10は、交流電源から、ロボット制御装置10が搭載している各種電気回路及びマニピュレータ30に供給される消費電力を検出する電力演算部23(電力検出手段)と、マニピュレータ30の稼働履歴に関連付けて、電力演算部23(電力検出手段)が検出した消費電力を記憶する記憶部12(記憶手段)を備える。又、ロボット制御装置10は、指示された期間における累積消費電力の出力指令があった際に、指示された期間における記憶部12が記憶した稼働履歴と、稼働履歴と関連付けられた前記消費電力に基づいて累積消費電力を演算し、外部に接続したティーチペンダントTP(外部装置)へ出力するCPU11(演算手段)を備える。
【0060】
この結果、本実施形態では、CPU11が外部に接続されたティーチペンダントTPに対して、マニピュレータ30の稼働履歴及び該稼働履歴と関連付けられた消費電力を積算した累積消費電力を出力できるため、マニピュレータの運転状況を示す稼働履歴と、マニピュレータ及びロボット制御装置の消費電力とを照らし合わせて分析できる。
【0061】
すなわち、日々自動的に取得されるデータに基づいて、工場内の継続的な累積消費電力の管理を行うことが可能となる。
(2) 本実施形態のロボット制御装置10は、交流電源が一次側に接続されるとともに、CPU11(制御手段)からの制御指令に基づいて二次側からマニピュレータ30が備えるサーボモータに電流を供給するサーボアンプ13と、サーボアンプ13の一次側に接続されたノイズ除去用のコモンモードチョークコイル(リアクトル)を備えている。
【0062】
又、電力演算部23(電力検出手段)は、コモンモードチョークコイル(リアクトル)の両端電圧、及びコモンモードチョークコイル(リアクトル)の既知の抵抗値に基づいて算出した電流値に基づいて電力を検出する。
【0063】
この結果、本実施形態によれば、コモンモードノイズ除去用のリアクトルをシャント抵抗とし、その両端電圧と該コモンモードチョークコイルの既知の抵抗値に基づいて該コモンモードチョークコイルに流れる電流値を算出して、前記測定値と該電流値により消費電力を検出する。一般的に、サーボアンプの一次側には、ノイズ除去用のリアクトルが設けられることが多く、このリアクトルをシャント抵抗とするため、新たなシャント抵抗を設ける必要がない。
【0064】
特にロボット制御装置では、コモンモードチョークコイルが、標準的構成としてサーボアンプの一次側に設けられている。本実施形態によれば、コモンモードノイズを除去するコモンモードチョークコイルを利用することにより、新たにシャント抵抗を設けることなく、マニピュレータとロボット制御装置の消費電力を検出できる。
【0065】
(3) 本実施形態のロボット制御装置10のCPU11(演算手段)は、ティーチペンダントTP(可搬式操作装置)に稼働履歴及び該稼働履歴と関連付けられた累積消費電力を出力する。この結果、本実施形態では、マニピュレータ30の稼働履歴及び該稼働履歴と関連付けられたマニピュレータ30とロボット制御装置10の累積消費電力が、ティーチペンダントTPに出力される。このため、ティーチペンダントTPに一般的に備わっているモニタ表示部41(表示手段)に、その稼働履歴と、マニピュレータ30及びロボット制御装置10の累積消費電力を表示することにより、両データを照らし合わせて分析できる。
【0066】
(4) 本実施形態のロボット制御装置10のCPU11(演算手段)は、上位制御部40(管理装置)に稼働履歴及び該稼働履歴と関連付けられた累積消費電力を出力するようにした。この結果、本実施形態によれば、マニピュレータ30の稼働履歴及び該稼働履歴と関連付けられたマニピュレータ30とロボット制御装置10の累積消費電力が、上位制御部40(管理装置)に出力される。このため、上位制御部40に一般的に備わっている表示装置(表示手段)やプリンタ(印刷手段)に、その稼働履歴と、マニピュレータ30及びロボット制御装置10の累積消費電力を出力することにより、両データを照らし合わせて分析できる。
【0067】
又、ロボット制御装置10の上位制御部40がもつ通信ネットワークを活用すれば、工場内の複数のロボット制御装置及び複数のマニピュレータの累積消費電力の見える化も可能となり、温室効果ガスの排出取引に不可欠な節電量の継続的なモニタリングが無理なく行うことが可能となる。
【0068】
(5) 本実施形態のロボット制御装置10のCPU11(演算手段)は、測定開始キー42aのオン信号(測定開始指令)に基づいて前記電力検出手段が検出した消費電力の積算を開始して、測定終了キー42bのオン信号(測定終了指令)に基づいて消費電力の積算を終了する。そして、測定開始キー42aのオン信号と測定終了キー42bのオン信号を入力した時刻間の稼働履歴とともに、積算した累積消費電力をティーチペンダントTPへ出力する。
【0069】
この結果、本実施形態によれば、作業者が任意の測定開始時刻から任意の測定終了時刻までの稼働履歴と、その間の累積消費電力とを照らし合わせて分析ができる。
なお、本発明は前記実施形態に限定されるものではなく、下記のように構成してもよい。
【0070】
・ 前記実施形態では、溶接開始コマンド、溶接終了コマンドのそれぞれの時刻を記憶するようにしたが、稼働履歴はこれらのコマンドに限定するものではなく、マニピュレータ30を動作させるための他のコマンドを稼働履歴として記録するようにしてもよい。そして、任意のコマンド間の作業時間における累積消費電力をティーチペンダントTPや、或いは上位制御部40に送信(図1の通信C)するようにしてもよい。
【0071】
・ 前記実施形態では、コモンモードチョークコイル部22を設けたが、コモンモードチョークコイル部22の代わりに、コモンモードチョークコイル部22の接続位置において高調波ノイズを除去するチョークコイル部を設けるようにしてもよい。この場合、チョークコイル部は、各相の電力線L1〜L3にチョークコイルを接続することにより構成する。この各相に設けたチョークコイルの両端電圧を、前記実施形態と同様に電力演算部23にて検出し、消費電力を同様に算出するようにしてもよい。この場合、チョークコイルの抵抗値をパラメータとして、電力演算部23は、図示しない記憶部に記憶しておくものとする。
【0072】
・ 前記実施形態では、外部装置として、ティーチペンダントTP及び上位制御部40をロボット制御装置10に接続したが、いずれか一方の接続を省略してもよい。
【符号の説明】
【0073】
10…ロボット制御装置、11…CPU(制御手段、演算手段)、
13…サーボアンプ、22…コモンモードチョークコイル部、
23…電力演算部(電力検出手段)、20…分電盤、
30…マニピュレータ、40…上位制御部(外部装置)、
42…入力手段、42a…測定開始キー、42b…測定終了キー、
TP…ティーチペンダント。
【特許請求の範囲】
【請求項1】
マニピュレータを制御する制御手段を備えたロボット制御装置であって、
交流電源から、前記ロボット制御装置が搭載している各種電気回路及びマニピュレータに供給される消費電力を検出する電力検出手段と、
前記マニピュレータの稼働履歴に関連付けて、前記電力検出手段が検出した消費電力を記憶する記憶手段と、
指示された期間における累積消費電力の出力指令があった際に、前記指示された期間における前記記憶手段が記憶した前記稼働履歴と、該稼働履歴と関連付けられた前記消費電力に基づいて累積消費電力を演算し、外部に接続した外部装置へ出力する演算手段を備えることを特徴とするロボット制御装置。
【請求項2】
前記交流電源が一次側に接続されるとともに、前記制御手段からの制御指令に基づいて二次側から前記マニピュレータが備えるサーボモータに電流を供給するサーボアンプと、
前記サーボアンプの一次側に接続されたノイズ除去用のリアクトルを備え、
前記電力検出手段は、前記リアクトルの両端電圧、及び前記リアクトルの既知の抵抗値に基づいて算出した電流値に基づいて電力を検出することを特徴とする請求項1に記載のロボット制御装置。
【請求項3】
前記外部装置が可搬式操作装置であり、
前記演算手段は、前記可搬式操作装置に前記稼働履歴及び該稼働履歴と関連付けられた前記累積消費電力を出力することを特徴とする請求項2に記載のロボット制御装置。
【請求項4】
前記外部装置が当該ロボット制御装置を管理する上位の管理装置であり、
前記演算手段は、前記管理装置に前記稼働履歴及び該稼働履歴と関連付けられた前記累積消費電力を出力することを特徴とする請求項2に記載のロボット制御装置。
【請求項5】
前記リアクトルは、コモンモードノイズを除去するコモンモードチョークコイルであることを特徴とする請求項2乃至請求項4のうちいずれか1項に記載のロボット制御装置。
【請求項6】
前記リアクトルは、高調波対策用のチョークコイルであることを特徴とする請求項2乃至請求項4のうちいずれか1項に記載のロボット制御装置。
【請求項7】
前記演算手段は、測定開始指令に基づいて前記電力検出手段が検出した消費電力の積算を開始して、測定終了指令に基づいて消費電力の積算を終了し、測定開始指令と測定終了指令を入力した時刻間の稼働履歴とともに、積算した累積消費電力を外部装置へ出力することを特徴とする請求項1乃至請求項6のうちいずれか1項に記載のロボット制御装置。
【請求項1】
マニピュレータを制御する制御手段を備えたロボット制御装置であって、
交流電源から、前記ロボット制御装置が搭載している各種電気回路及びマニピュレータに供給される消費電力を検出する電力検出手段と、
前記マニピュレータの稼働履歴に関連付けて、前記電力検出手段が検出した消費電力を記憶する記憶手段と、
指示された期間における累積消費電力の出力指令があった際に、前記指示された期間における前記記憶手段が記憶した前記稼働履歴と、該稼働履歴と関連付けられた前記消費電力に基づいて累積消費電力を演算し、外部に接続した外部装置へ出力する演算手段を備えることを特徴とするロボット制御装置。
【請求項2】
前記交流電源が一次側に接続されるとともに、前記制御手段からの制御指令に基づいて二次側から前記マニピュレータが備えるサーボモータに電流を供給するサーボアンプと、
前記サーボアンプの一次側に接続されたノイズ除去用のリアクトルを備え、
前記電力検出手段は、前記リアクトルの両端電圧、及び前記リアクトルの既知の抵抗値に基づいて算出した電流値に基づいて電力を検出することを特徴とする請求項1に記載のロボット制御装置。
【請求項3】
前記外部装置が可搬式操作装置であり、
前記演算手段は、前記可搬式操作装置に前記稼働履歴及び該稼働履歴と関連付けられた前記累積消費電力を出力することを特徴とする請求項2に記載のロボット制御装置。
【請求項4】
前記外部装置が当該ロボット制御装置を管理する上位の管理装置であり、
前記演算手段は、前記管理装置に前記稼働履歴及び該稼働履歴と関連付けられた前記累積消費電力を出力することを特徴とする請求項2に記載のロボット制御装置。
【請求項5】
前記リアクトルは、コモンモードノイズを除去するコモンモードチョークコイルであることを特徴とする請求項2乃至請求項4のうちいずれか1項に記載のロボット制御装置。
【請求項6】
前記リアクトルは、高調波対策用のチョークコイルであることを特徴とする請求項2乃至請求項4のうちいずれか1項に記載のロボット制御装置。
【請求項7】
前記演算手段は、測定開始指令に基づいて前記電力検出手段が検出した消費電力の積算を開始して、測定終了指令に基づいて消費電力の積算を終了し、測定開始指令と測定終了指令を入力した時刻間の稼働履歴とともに、積算した累積消費電力を外部装置へ出力することを特徴とする請求項1乃至請求項6のうちいずれか1項に記載のロボット制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2013−63476(P2013−63476A)
【公開日】平成25年4月11日(2013.4.11)
【国際特許分類】
【出願番号】特願2011−202027(P2011−202027)
【出願日】平成23年9月15日(2011.9.15)
【出願人】(000000262)株式会社ダイヘン (990)
【Fターム(参考)】
【公開日】平成25年4月11日(2013.4.11)
【国際特許分類】
【出願日】平成23年9月15日(2011.9.15)
【出願人】(000000262)株式会社ダイヘン (990)
【Fターム(参考)】
[ Back to top ]