
産業用ロボット及び産業用ロボットのケーブル部の配置方法
【課題】
旋回台の旋回中心を挟むように配置された異なるケーブル部同士を交差させることがなく、ケーブル部同士の干渉を防止するためのセパレートプレートの製作及び取り付けの用の取付座の加工、セパレートプレートの取付作業が必要でない。
【解決手段】
一側壁側から位に位置する一方のコンジット40を旋回台30の第1回転軸心J1の周りに沿って円弧状に配置して側壁30a側に寄せて配置する。側壁30a側から近位に位置するコンジット50は、第1回転軸心J1の周りに沿って円弧状に配置した後、さらに一方のコンジット40に近位の部位ではコンジット40に干渉しないように回避して折り返した後、側壁30a側に寄せて配置する。
旋回台の旋回中心を挟むように配置された異なるケーブル部同士を交差させることがなく、ケーブル部同士の干渉を防止するためのセパレートプレートの製作及び取り付けの用の取付座の加工、セパレートプレートの取付作業が必要でない。
【解決手段】
一側壁側から位に位置する一方のコンジット40を旋回台30の第1回転軸心J1の周りに沿って円弧状に配置して側壁30a側に寄せて配置する。側壁30a側から近位に位置するコンジット50は、第1回転軸心J1の周りに沿って円弧状に配置した後、さらに一方のコンジット40に近位の部位ではコンジット40に干渉しないように回避して折り返した後、側壁30a側に寄せて配置する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、産業用ロボット及び産業用ロボットのケーブル部の配置方法に関するものである。
【背景技術】
【0002】
産業用ロボットでは、アームや旋回台を駆動するモータに接続されたケーブルや信号ケーブル等の各種ケーブルを基台の内部から旋回台へ引き出されるように配置されている。特許文献1では、基台(固定部)に対してアームを有する旋回台が旋回自在に支持され、旋回台には、駆動モータが固定されている。前記駆動モータは基台と旋回台の旋回中心に設けられた減速機を介して旋回台を旋回駆動するようにしている。前記減速機には、旋回中心軸と同軸の第1の中空穴が形成されるとともに、前記旋回中心軸の径方向に変位した部位には、円弧状に形成された第2の中空穴が形成されている。そして、前記第1の中空穴と第2の中空穴に対してそれぞれ配線ケーブルが挿通されて、基台から旋回台への配線ケーブルの配設が行われている。しかし、特許文献1では、中空穴を有する減速機(以下、中空減速機という)を使用することから高コストとなる。このため、コストダウンの観点から中空減速機を使用しない場合には、図8〜図12に示すようなケーブルの配置が行われている。この従来構成について以下に説明する。
【0003】
図8、図10に示すように、産業用ロボットの基台100上には複数のアーム102を有する旋回台110が旋回自在に支持されている。旋回台110内には駆動モータ120の出力軸が基台100に固定された減速機130と作動連結されており、駆動モータ120が回転駆動されると、旋回台110は旋回動作する。
【0004】
また、基台100は、図9に示すように側壁101により形成された収納空間103を有する。側壁101には収納空間103に連通する開口106が形成され、閉塞板108により閉塞されている。図10に示すように収納空間103において、減速機130の下方周辺には減速機130の略リング状の外周に沿って収納凹部104が設けられている。
【0005】
収納空間103及び収納凹部104において、図9〜図11に示すように旋回台110の旋回中心軸Sを中心にして一側方側には複数のケーブルを収納するコンジット140が配置されている。コンジット140内に収納されたケーブルは、例えばロボットを制御するための各種信号用のケーブルや、産業用ロボットの各アームを駆動する駆動モータの電源ケーブルである。
【0006】
前記各ケーブルの一端は、コンジット140の一端140a側において、基台100の閉塞板108に設けられた端子盤(図示しない)に接続されている。
前記コンジット140は、収納凹部104内に位置する下行部位140bと、開口106から遠位の収納凹部104の奥部で180度折り返されて、旋回台110内に収納される上行部位140cを有する。
【0007】
図10に示すように、旋回台110は側壁111及び底壁113により区画されることにより、減速機130の上方周辺に設けられた略リング状の収納凹部112と、図11に示すように収納凹部112と連通する第1収納室118と、第1収納室118に隣接するとともに、下行部位140bとは駆動モータ120を挟んで反対側に位置する第2収納室119を有する。第2収納室119は、旋回中心軸Sを中心にしてコンジット140の下行部位140bが位置する側とは反対側の側方に位置する。
【0008】
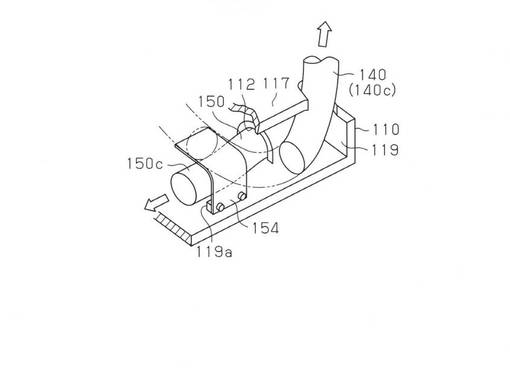
上行部位140cは、図11、図12に示すように収納凹部112内から第1収納室118を経て第2収納室119内に延びるとともに、第2収納室119上の天井壁117を介して旋回台110の上方へ延出されている。
【0009】
このように、前記コンジット140を旋回台110から外部に導出する部位は、コンジット140を折り返す部位からは、旋回台110の旋回中心軸Sを挟むようにして遠位の位置にある。
【0010】
収納空間103及び収納凹部104において、図9〜図11に示すように旋回台110の旋回中心軸Sを中心にして他側方側にはケーブルを収納するコンジット150が配置されている。コンジット150内に収納されたケーブルは、例えば産業用ロボットが溶接ロボットである場合、溶接用のパワーケーブルである。コンジット150内の各ケーブルの一端は、コンジット150の一端150a側において、基台100の開口106を閉塞する閉塞板108に設けられた端子盤(図示しない)に接続されている。
【0011】
前記コンジット150は、収納凹部104内に位置する下行部位150bと、開口106から遠位の収納凹部104の奥部で180度折り返されて、旋回台110内に収納される上行部位150cを有する。
【0012】
上行部位150cは、図11、図12に示すように収納凹部112から第2収納室119内へ導入されるとともにコンジット140の上行部位140cの下方で交差するように略直線状に延びるとともに、第2収納室119に隣接して配置された端子ボックス160内の接続端子162に接続されている。
【0013】
上記のようにして、コンジット140の上行部位140cと、コンジット150の上行部位150cとは交差して配置するが、互いの干渉を避けるため、図12に示すように第2収納室119の底壁に設けられた取付座119aには、上行部位140cと上行部位150cの間に介在するようにセパレートプレート154が固定されている。
【先行技術文献】
【特許文献】
【0014】
【特許文献1】特開2009−90381号公報
【発明の概要】
【発明が解決しようとする課題】
【0015】
ところが、上記のように従来は中空減速機を使用しない場合には、コンジット同士の交差部分での干渉を防止するためのセパレートプレートを必要としているため、セパレートプレートの製作及びセパレートプレートを取り付けるための取付座の加工、並びにセパレートプレートの取付作業を行う必要がある。
【0016】
本発明の目的は、旋回台の旋回中心を挟むように配置された異なるケーブル部同士を交差させることがないとともに、前記ケーブル部同士の干渉を防止するためのセパレートプレートの製作及びセパレートプレートを取り付けるための取付座の加工、並びにセパレートプレートの取付作業が必要でない産業用ロボット及び産業用ロボットのケーブル部の配置方法を提供することにある。
【課題を解決するための手段】
【0017】
上記問題点を解決するために、請求項1に記載の発明は、基台に対して旋回可能に設けられた旋回台を備え、前記旋回台の旋回中心軸を挟む互いに反対側で前記基台内に配置された一対のケーブル部をそれぞれ上方へ折り返して、折り返し後の該一対のケーブル部の端を、前記旋回台内の一側壁側に共に寄せて配置する産業用ロボットにおいて、前記一対のケーブル部の内、前記一側壁側から遠位に位置する一方のケーブル部は、前記旋回中心軸の周りに沿って円弧状に配置して前記一側壁側に寄せて配置し、前記一側壁側から近位に位置する他方のケーブル部は、前記旋回中心軸の周りに沿って円弧状に配置し、さらに前記一方のケーブル部に近位の部位では該一方のケーブル部に干渉しないように回避して折り返すとともに前記一側壁に寄せて配置したことを特徴とする産業用ロボットを要旨としている。
【0018】
請求項2の発明は、請求項1において、前記一対のケーブル部は、共に柔軟性を有するコンジット内に配置されていることを特徴とする。
請求項3の発明は、請求項1又は請求項2において、前記他方のケーブル部は、前記一方のケーブル部よりも柔軟性が高いことを特徴とする。
【0019】
請求項4の発明は、請求項2において、前記他方のケーブル部は、前記旋回中心軸の周りに沿って円弧状に配置した後、さらに前記一方のケーブル部に近位の部位では、前記コンジットが除去されていることを特徴とする。
【0020】
請求項5の発明は、基台に対して旋回可能に設けられた旋回台を備え、前記旋回台の旋回中心軸を挟む互いに反対側で前記基台内に配置された一対のケーブル部をそれぞれ上方へ折り返して、折り返し後の該一対のケーブル部の端を、前記旋回台内の一側壁側に共に寄せて配置する産業用ロボットのケーブル部の配置方法において、前記一対のケーブル部の内、前記一側壁側から遠位に位置する一方のケーブル部は、前記旋回中心軸の周りに沿って円弧状に配置して前記一側壁側に寄せて配置し、前記一側壁側から近位に位置する他方のケーブル部は、前記旋回中心軸の周りに沿って円弧状に配置し、さらに前記一方のケーブル部に近位の部位では該一方のケーブル部に干渉しないように回避して折り返すとともに前記一側壁に寄せて配置することを要旨としている。
【発明の効果】
【0021】
請求項1の発明によれば、旋回台の旋回中心を挟むように配置された異なるケーブル部同士を交差させることがないとともに、前記ケーブル部同士の干渉を防止するためのセパレートプレートの製作及びセパレートプレートを取り付けるための取付座の加工、並びにセパレートプレートの取付作業が必要でない産業用ロボットを提供できる。
【0022】
請求項2の発明によれば、ケーブル部がコンジット内に配置された構成であっても、請求項1の効果を容易に実現できる。
請求項3の発明によれば、他方のケーブル部が、一方のケーブル部よりも柔軟性が高いことにより、他方のケーブル部を旋回中心軸の周りに沿って円弧状に配置した後、さらに一方のケーブル部に近位の部位では該一方のケーブル部に干渉しないように回避して折り返す場合、容易に折り返しが可能となる。
【0023】
請求項4の発明によれば、他方のケーブル部は、前記旋回中心軸の周りに沿って円弧状に配置した後、さらに前記一方のケーブル部に近位の部位では、前記コンジットが除去されていることにより、他方のケーブル部を旋回中心軸の周りに沿って円弧状に配置した後、さらに一方のケーブル部に近位の部位では該一方のケーブル部に干渉しないように回避して折り返す場合、容易に折り返しが可能となる。
【0024】
請求項5の発明によれば、セパレートプレートの製作及びセパレートプレートを取り付けるための取付座の加工、並びにセパレートプレートの取付作業が必要でない産業用ロボットのケーブル部の配置方法を提供できる。
【図面の簡単な説明】
【0025】
【図1】一実施形態の産業用ロボットの全体側面図。
【図2】一実施形態の産業用ロボットの要部側面図。
【図3】一実施形態の他方のケーブル部の配置状態を示す説明図。
【図4】一実施形態の基台及び旋回台の縦断面図。
【図5】一実施形態の基台の横断面図。
【図6】一実施形態の要部断面図。
【図7】(a)は、第2収納室におけるケーブル部の配置状態を示す説明図、(b)は、他の実施形態の第2収納室におけるケーブル部の配置状態を示す説明図。
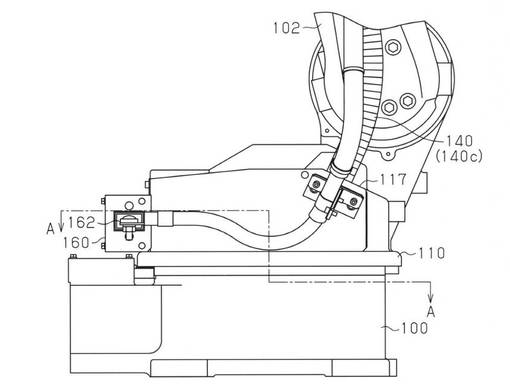
【図8】従来例の産業用ロボットの要部側面図。
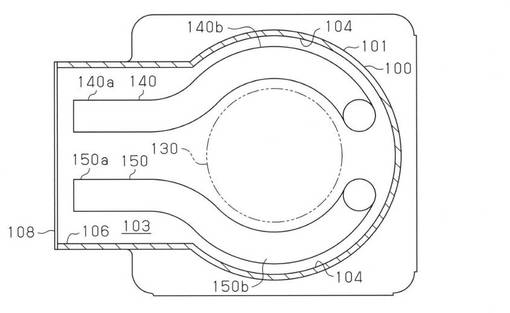
【図9】従来例の基台の横断面図。
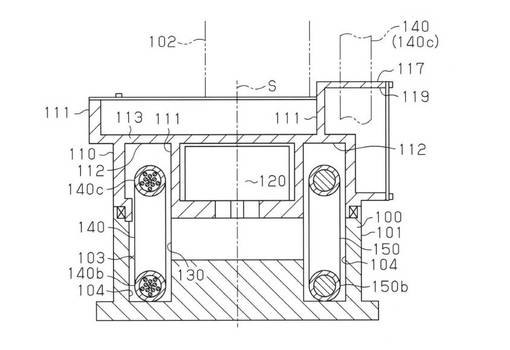
【図10】従来例の基台及び旋回台の縦断面図。
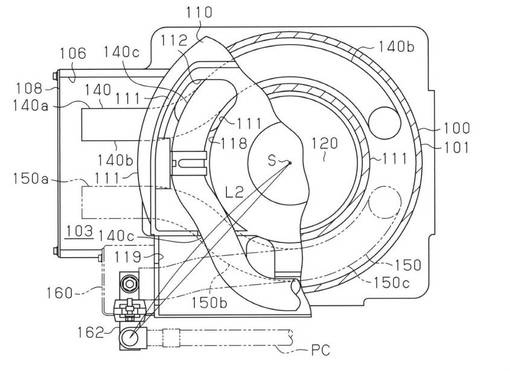
【図11】図8のA−A線の要部断面図。
【図12】コンジット140とコンジット150の交差を示す説明図。
【発明を実施するための形態】
【0026】
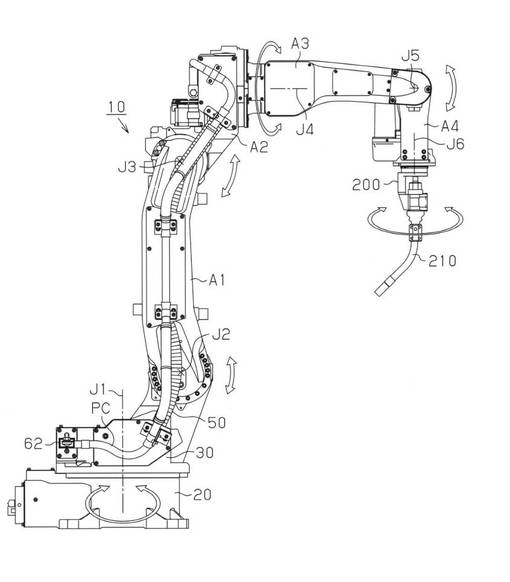
以下、本発明の産業用ロボットを、6自由度を有する溶接ロボットに具体化した一実施形態を図1〜図7(a)を参照して説明する。
図1に示すように、マニピュレータ10の旋回台30は、基台20に対して第1回転軸心J1の周りに旋回可能に設けられている。前記旋回台30には前記第1回転軸心J1と直交する面内の第2回転軸心J2の周りに第1アームA1が回動可能に設けられている。又、前記第1アームA1の上端には第2回転軸心J2と平行の第3回転軸心J3の周りに第2アームA2が揺動可能に設けられている。
【0027】
さらに、第2アームA2の先端部には、第3回転軸心J3と直交する面内の第4回転軸心J4の周りに胴体A3が回動可能に設けられている。又、前記胴体A3の先端部には手首部を構成する揺動体A4が取り付けられて、第4回転軸心J4(手首第1軸)に直交する面内の第5回転軸心J5周りに揺動する。
【0028】
揺動体A4には、回転体200が取り付けられて第5回転軸心J5に直交する面内の第6回転軸心J6周りに回転する。回転体200には作業ツールとしての溶接トーチ210が取り付けられている。マニピュレータ10の第1回転軸心J1乃至第6回転軸心J6には、駆動モータが設けられていて、図示しないロボット制御装置からの指令(制御信号)を入力して駆動される。
【0029】
次に、基台20及び旋回台30内に収納されるケーブル部の配置構造について説明する。
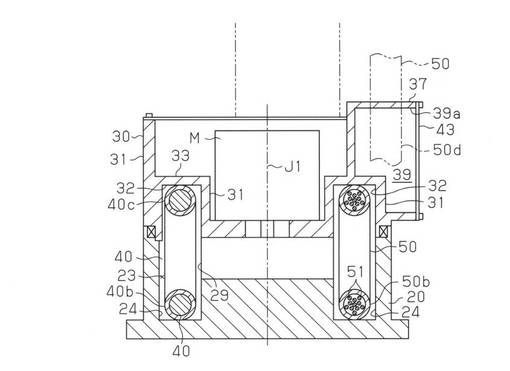
図4に示すように旋回台30内には駆動モータMの出力軸が基台20に固定された減速機29と作動連結されており、駆動モータMが回転駆動されると、旋回台30は第1回転軸心J1の周りで旋回動作する。
【0030】
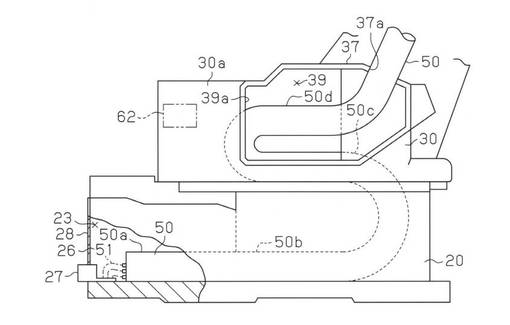
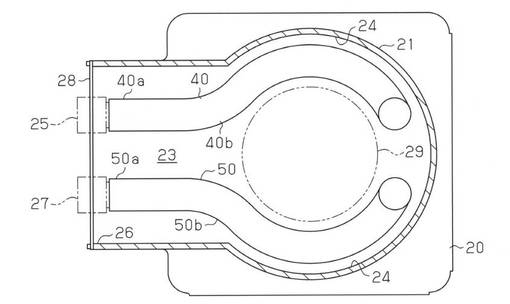
また、基台20は、図5に示すように側壁21により形成された収納空間23を有する。側壁21には収納空間23に連通する開口26が形成され、閉塞板28により閉塞されている。図4に示すように収納空間23において、減速機29の下方周辺は略円形リング状をなす収納凹部24が形成されている。
【0031】
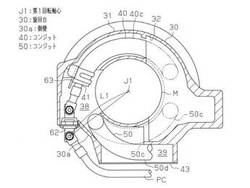
収納空間23及び収納凹部24において、図3〜図6に示すように旋回台30の第1回転軸心J1(すなわち、旋回中心軸)を中心にして一側方側にはケーブルを収納するとともに柔軟性を有するコンジット40が配置されている。コンジット40内に収納されたケーブルは、溶接用のパワーケーブルである。
【0032】
前記ケーブルの一端は、コンジット40の一端40a側において、基台20の開口26を閉塞する閉塞板28に設けられた端子盤25に接続されている。
前記コンジット40は、収納凹部24内に位置する下行部位40bと、開口26から遠位の収納凹部24の奥部で180度折り返されて、旋回台30内に収納される上行部位40cを有する。
【0033】
旋回台30は、側壁31及び底壁33により区画されることにより、図4に示すように減速機29の上方周辺に設けられた略リング状をなす収納凹部32と、図6に示すように収納凹部32と連通する第1収納室38と、第1収納室38に隣接するとともに、下行部位40bとは駆動モータMを挟んで反対側に位置する一側壁側には第2収納室39を有する。ここで、一側壁は、図2で示す旋回台30の側壁30a及び後述する閉塞板43に相当する。
【0034】
第2収納室39は、第1回転軸心J1(旋回中心軸)を中心にしてコンジット40の下行部位40bが位置する側とは反対側の側方に位置する。第2収納室39は、旋回台30における一側壁側に設けられた収納室に相当する。収納凹部32は、収納凹部24と相対するように、かつ第1回転軸心J1と同軸となるように形成されている。
【0035】
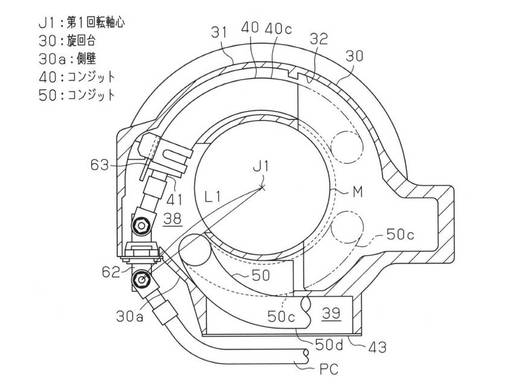
上行部位40cの先端は、図6に示すように収納凹部32内から第1収納室38に入り、第1収納室38の一方の側壁(図6では、第2収納室39側に位置する側壁)に向けて配置されている。すなわち、図6に示すように、上行部位40cは、第1回転軸心J1(旋回中心軸)の周りに沿って円弧状に配置されている。
【0036】
また、コンジット40のケーブル41の端部は、図6に示すように第2収納室39側に寄せて配置されて、第1収納室38の前記一方の側壁に固定された接続端子62に接続固定されている。
【0037】
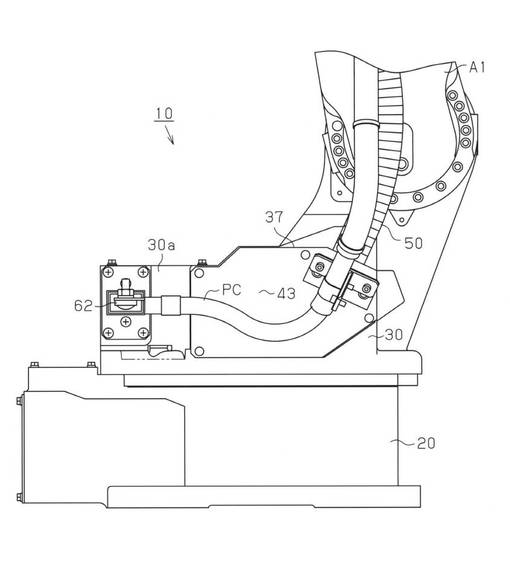
なお、本実施形態では、上行部位40cの先端は、第1収納室38の側壁に対してブラケット63を介して取付けられている。本実施形態の上行部位40cのケーブル41は、大径のケーブルであり、本発明の一方のケーブル部に相当する。
【0038】
図1に示すように、接続端子62の外部端子には、パワーケーブルPCの下端が接続されている。パワーケーブルPCの上端は、第2アームA2内に導入され、図示しないワイヤ送給装置に接続されている。
【0039】
このように、前記コンジット40のケーブル41を接続する接続端子62の位置は、コンジット40を180度折り返す部位からは、旋回台30の旋回中心軸Sを挟むようにして遠位の位置にある。
【0040】
また、収納空間23及び収納凹部24において、図3〜図6に示すように旋回台30の第1回転軸心J1(旋回中心軸)を中心にして他側方側には複数のケーブル51を収納するとともに柔軟性を有するコンジット50が配置されている。コンジット50内に収納されたケーブル51は、ロボットを制御するための各種信号用のケーブルや、産業用ロボットの各アームを駆動する駆動モータの電源ケーブルである。本実施形態の複数のケーブル51は、ケーブル41よりも径が小径であってケーブル41よりも柔軟性が高くされている。
【0041】
本実施形態の複数のケーブル51により、本発明の他方のケーブル部が構成されている。また、一方のケーブル部を収納したコンジット40を折り返す場合よりも他方のケーブル部を収納したコンジット50の方が、柔軟性が高くするようにコンジット50及びケーブル51が選定されている。
【0042】
コンジット50内の各ケーブル51の一端は、コンジット50の一端50a側において、基台20の閉塞板28に設けられた端子盤27に接続されている。前記コンジット50は、収納凹部24内に位置する下行部位50bと、図3に示すように開口26から遠位の収納凹部24の奥部で180度折り返されて、旋回台30内に収納される上行部位50cを有する。
【0043】
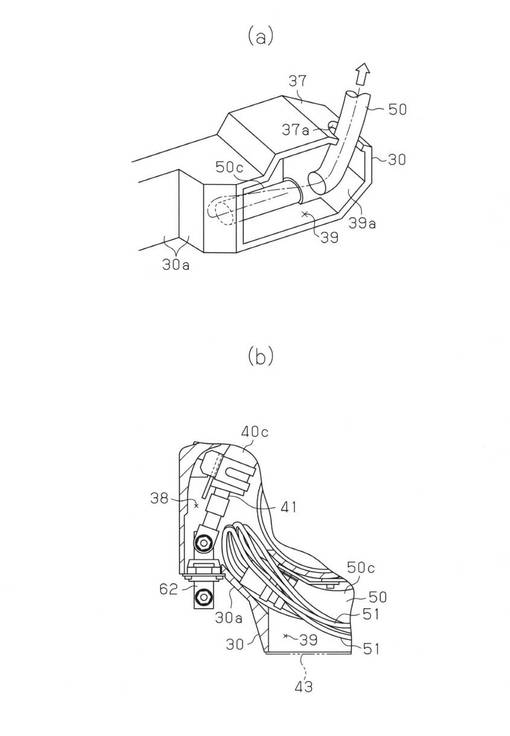
上行部位50cは、図6、図7(a)に示すように収納凹部32から駆動モータMの円弧状の周面に沿うように円弧状となって第1収納室38内へ導入されるとともに、第2収納室39側に寄せて配置されている。すなわち、上行部位50cは第1回転軸心J1(旋回中心軸)の周りに沿って円弧状に配置されるとともに、コンジット40の上行部位40cに到達しないように上行部位40cに近位の部位で図3、図6に示すように折り返されて、折り返された部位50dが第2収納室39内に導入されている。さらに、第2収納室39内に導入されたコンジット50の部位は第2収納室39上の天井壁37に形成された導出溝37aを介して旋回台30の上方へ延出されている。
【0044】
なお、第2収納室39の一側方は開口39aが形成されており、開口39aの周壁には、開口39aを閉塞する閉塞板43が着脱自在にボルトにより取り付けられている。
旋回台30から外部に出たコンジット50は第1アームA1の上部まで延出されるとともに、コンジット50内の各ケーブルは第1アームA1の上部の図示しない導入孔を介して第1アームA1内に挿入されている。
【0045】
(実施形態の作用)
さて、上記のように構成された溶接ロボットの作用を説明する。
本実施形態のコンジット50の上行部位50cは、図6、図7(a)に示すように収納凹部32から駆動モータMの円弧状の周面に沿うように、すなわち、第1回転軸心J1(旋回中心軸)の周りに沿って円弧状に配置されるとともに、コンジット40の上行部位40cに到達しないように上行部位40cに近位の部位で図3、図6に示すように折り返される。そして、折り返された部位50dが第2収納室39内に導入されている。
【0046】
すなわち、コンジット50の上行部位50c内のケーブル部(ケーブル51)は上行部位50cが円弧状となることにより、コンジット50に規制されて同様に第1回転軸心J1(旋回中心軸)の周りに沿って円弧状に配置される。
【0047】
このため、従来と異なり、コンジット40とコンジット50とが交差することはないため、両ケーブル部の干渉を防止するためのセパレートプレートが不要となる。またセパレートプレートが不要のため、従来と異なり取付座を第2収納室39に設ける必要もなく。さらにセパレートプレートを取付る作業も必要でなくなる。
【0048】
また、本実施形態では、コンジット40のケーブル部(ケーブル41)よりもコンジット50のケーブル部(ケーブル51)の方が柔軟性があるため、コンジット40の上行部位40cに到達しないように上行部位40cに近位の部位で図3、図6に示すようにコンジット50の上行部位50cを折り返す作業を容易に行うことができる。
【0049】
また、本実施形態では、コンジット40の上行部位40cが円弧状に配置されるとともにその端部からケーブル41が延長されて、その延長方向に沿って接続端子162を配置することができる。ここで、コンジット40の上行部位40c内のケーブル部(ケーブル41)は上行部位40cが円弧状となることにより、コンジット40に規制されて同様に第1回転軸心J1(旋回中心軸)の周りに沿って円弧状に配置される。
【0050】
すなわち、コンジット50の上行部位50cがケーブル41に干渉しないように折り返されるため、駆動モータMの周囲にスペースができ、このスペースを利用して、上行部位40cの端部からケーブル41が延長させることが可能となり、図11に示す従来例よりも、第1回転軸心J1からは比較的近い位置に接続端子62を配置することができる。
【0051】
一方、従来例の図11では、コンジット150の上行部位150cが駆動モータ120の周囲に沿って円弧状に配置されるとともに直線状に延出されて第2収納室119に隣接する端子ボックス160の接続端子162にコンジット150内のケーブルが接続される構成となっている。
【0052】
ここで、図6において、L1を第1回転軸心J1から接続端子62のパワーケーブルPC用の端子までの距離し、図11において、L2を旋回中心軸Sから接続端子162のパワーケーブルPCを接続するための端子までの距離とする。
【0053】
従来例では、第2収納室119内においてコンジット同士が交差するため、第2収納室119では、接続端子162を配置するスペースがなく、旋回中心軸Sから離間した位置に接続端子162を配置するためである。
【0054】
このため、駆動モータM,120が同一出力で、同一の径とし、従来と本実施形態の各コンジットが同じ径である場合、L1<L2となる。
本実施形態によれば、下記の特徴がある。
【0055】
(1) 本実施形態の溶接ロボットは、基台20に対して旋回可能に設けられた旋回台30を備え、旋回台30の第1回転軸心J1(旋回中心軸)を挟む互いに反対側で基台20内に配置された一対のケーブル部(ケーブル41、51)をそれぞれ上方へ折り返すとともに該一対のケーブル部の端を、旋回台30内の一側壁側、すなわち、第2収納室39側に共に寄せて配置している。
【0056】
そして、一対のケーブル部(ケーブル41、51)の内、前記一側壁側から遠位に位置する一方のケーブル部(ケーブル41)は、第1回転軸心J1(旋回中心軸)の周りに沿って円弧状に配置して前記一側壁側に寄せて配置している。
【0057】
また、一側壁側から近位に位置する他方のケーブル部(ケーブル51)は、第1回転軸心J1(旋回中心軸)の周りに沿って円弧状に配置し、さらに一方のケーブル部(ケーブル41)に近位の部位ではケーブル41に干渉しないように回避して折り返すとともに一側壁に寄せて配置した。
【0058】
この結果、旋回台の旋回中心軸を挟むように配置された異なるケーブル部同士を交差させることがないとともに、前記ケーブル部同士の干渉を防止するためのセパレートプレートの製作及びセパレートプレートを取り付けるための取付座の加工、並びにセパレートプレートの取付作業が必要でなくなる効果を奏する。
【0059】
(2) 本実施形態では、一対のケーブル部(ケーブル41、51)は、共に柔軟性を有するコンジット内に配置されている。このため、本実施形態によれば、ケーブル部がコンジット内に配置された構成であっても、上記(1)の効果を容易に実現できる。
【0060】
(3) 本実施形態では、ケーブル51(他方のケーブル部)は、ケーブル41(一方のケーブル部)よりも柔軟性が高くされている。
この結果、本実施形態によれば、ケーブル51を第1回転軸心J1(旋回中心軸)の周りに沿って円弧状に配置した後、さらにケーブル41(一方のケーブル部)に近位の部位では該一方のケーブル部に干渉しないように回避して折り返す場合、容易に折り返しが可能となる。
【0061】
(4) 本実施形態のケーブル部の配置方法では、一対のケーブル部(ケーブル41、51)の内、前記一側壁側から遠位に位置する一方のケーブル部(ケーブル41)は、第1回転軸心J1(旋回中心軸)の周りに沿って円弧状に配置して前記一側壁側に寄せて配置し、一側壁側から近位に位置する他方のケーブル部(ケーブル51)は、第1回転軸心J1(旋回中心軸)の周りに沿って円弧状に配置し、さらに一方のケーブル部(ケーブル41)に近位の部位ではケーブル41に干渉しないように回避して折り返すとともに一側壁に寄せて配置する。
【0062】
この結果、本実施形態では、旋回台の旋回中心軸を挟むように配置された異なるケーブル部同士を交差させることがないとともに、前記ケーブル部同士の干渉を防止するためのセパレートプレートの製作及びセパレートプレートを取り付けるための取付座の加工、並びにセパレートプレートの取付作業が必要でなくなるケーブル部の配置方法を提供できる。
【0063】
なお、本発明は前記実施形態に限定されるものではなく、下記のように構成してもよい。
・ 前記実施形態において、コンジット50の上行部位50cでは、コンジット40の上行部位40cに到達しないように上行部位40cに近位の部位で図3、図6に示すように折り返されて、折り返された部位50dが第2収納室39内に導入されている。この代わりに、図7(b)に示すように、上行部位50cにおいてケーブル41に対向する部位ではコンジット50を除去してケーブル51を露出し、露出したケーブル51を折り返して第2収納室39内に導入した後、再び第2収納室39内において、コンジット50内にケーブル51を挿入配置し、その後、天井壁37の導出溝37aから外部へ導出するようにしてもよい。
【0064】
・ 前記実施形態では、コンジット40内には、ケーブル部として単一のケーブル41を挿入したが、単一のケーブルに限定するものではなく、複数のケーブルを挿入するようにしてもよい。
【0065】
・ 前記実施形態では、他方のケーブル部(ケーブル51)は、一方のケーブル部(ケーブル41)よりも柔軟性が高くしたが、逆の関係であってもよい。又、同等の柔軟性をそれぞれのケーブル部が有するようにしてもよい。
【0066】
・ 前記実施形態では、コンジット40内には、ケーブル部として単一のケーブル41を挿入したが、コンジット50内のケーブル部を逆に単一のケーブルとしてもよい。
・ 前記実施形態では、コンジット40、50を設けたが、コンジット40、50を省略してもよい、この場合はケーブル部が複数のケーブルで構成されている場合は、ケーブルをバインドで束ねるようにしてもよい。
【0067】
・ 前記実施形態では、産業用ロボットとして溶接ロボットに具体化したが、他の産業用ロボットに適用できることはいうまでもない。
・ 前記実施形態では、6自由度の溶接ロボットに具体化したが、基台と旋回台を有するロボットであれば、ロボットの種類は限定されるものではない。
【符号の説明】
【0068】
10…マニピュレータ、20…基台、30…旋回台、
40…コンジット、40c…上行部位、41…ケーブル(ケーブル部)、
50…コンジット、50c…上行部位、51…ケーブル(ケーブル部)、
J1…第1回転軸心(旋回中心軸)。
【技術分野】
【0001】
本発明は、産業用ロボット及び産業用ロボットのケーブル部の配置方法に関するものである。
【背景技術】
【0002】
産業用ロボットでは、アームや旋回台を駆動するモータに接続されたケーブルや信号ケーブル等の各種ケーブルを基台の内部から旋回台へ引き出されるように配置されている。特許文献1では、基台(固定部)に対してアームを有する旋回台が旋回自在に支持され、旋回台には、駆動モータが固定されている。前記駆動モータは基台と旋回台の旋回中心に設けられた減速機を介して旋回台を旋回駆動するようにしている。前記減速機には、旋回中心軸と同軸の第1の中空穴が形成されるとともに、前記旋回中心軸の径方向に変位した部位には、円弧状に形成された第2の中空穴が形成されている。そして、前記第1の中空穴と第2の中空穴に対してそれぞれ配線ケーブルが挿通されて、基台から旋回台への配線ケーブルの配設が行われている。しかし、特許文献1では、中空穴を有する減速機(以下、中空減速機という)を使用することから高コストとなる。このため、コストダウンの観点から中空減速機を使用しない場合には、図8〜図12に示すようなケーブルの配置が行われている。この従来構成について以下に説明する。
【0003】
図8、図10に示すように、産業用ロボットの基台100上には複数のアーム102を有する旋回台110が旋回自在に支持されている。旋回台110内には駆動モータ120の出力軸が基台100に固定された減速機130と作動連結されており、駆動モータ120が回転駆動されると、旋回台110は旋回動作する。
【0004】
また、基台100は、図9に示すように側壁101により形成された収納空間103を有する。側壁101には収納空間103に連通する開口106が形成され、閉塞板108により閉塞されている。図10に示すように収納空間103において、減速機130の下方周辺には減速機130の略リング状の外周に沿って収納凹部104が設けられている。
【0005】
収納空間103及び収納凹部104において、図9〜図11に示すように旋回台110の旋回中心軸Sを中心にして一側方側には複数のケーブルを収納するコンジット140が配置されている。コンジット140内に収納されたケーブルは、例えばロボットを制御するための各種信号用のケーブルや、産業用ロボットの各アームを駆動する駆動モータの電源ケーブルである。
【0006】
前記各ケーブルの一端は、コンジット140の一端140a側において、基台100の閉塞板108に設けられた端子盤(図示しない)に接続されている。
前記コンジット140は、収納凹部104内に位置する下行部位140bと、開口106から遠位の収納凹部104の奥部で180度折り返されて、旋回台110内に収納される上行部位140cを有する。
【0007】
図10に示すように、旋回台110は側壁111及び底壁113により区画されることにより、減速機130の上方周辺に設けられた略リング状の収納凹部112と、図11に示すように収納凹部112と連通する第1収納室118と、第1収納室118に隣接するとともに、下行部位140bとは駆動モータ120を挟んで反対側に位置する第2収納室119を有する。第2収納室119は、旋回中心軸Sを中心にしてコンジット140の下行部位140bが位置する側とは反対側の側方に位置する。
【0008】
上行部位140cは、図11、図12に示すように収納凹部112内から第1収納室118を経て第2収納室119内に延びるとともに、第2収納室119上の天井壁117を介して旋回台110の上方へ延出されている。
【0009】
このように、前記コンジット140を旋回台110から外部に導出する部位は、コンジット140を折り返す部位からは、旋回台110の旋回中心軸Sを挟むようにして遠位の位置にある。
【0010】
収納空間103及び収納凹部104において、図9〜図11に示すように旋回台110の旋回中心軸Sを中心にして他側方側にはケーブルを収納するコンジット150が配置されている。コンジット150内に収納されたケーブルは、例えば産業用ロボットが溶接ロボットである場合、溶接用のパワーケーブルである。コンジット150内の各ケーブルの一端は、コンジット150の一端150a側において、基台100の開口106を閉塞する閉塞板108に設けられた端子盤(図示しない)に接続されている。
【0011】
前記コンジット150は、収納凹部104内に位置する下行部位150bと、開口106から遠位の収納凹部104の奥部で180度折り返されて、旋回台110内に収納される上行部位150cを有する。
【0012】
上行部位150cは、図11、図12に示すように収納凹部112から第2収納室119内へ導入されるとともにコンジット140の上行部位140cの下方で交差するように略直線状に延びるとともに、第2収納室119に隣接して配置された端子ボックス160内の接続端子162に接続されている。
【0013】
上記のようにして、コンジット140の上行部位140cと、コンジット150の上行部位150cとは交差して配置するが、互いの干渉を避けるため、図12に示すように第2収納室119の底壁に設けられた取付座119aには、上行部位140cと上行部位150cの間に介在するようにセパレートプレート154が固定されている。
【先行技術文献】
【特許文献】
【0014】
【特許文献1】特開2009−90381号公報
【発明の概要】
【発明が解決しようとする課題】
【0015】
ところが、上記のように従来は中空減速機を使用しない場合には、コンジット同士の交差部分での干渉を防止するためのセパレートプレートを必要としているため、セパレートプレートの製作及びセパレートプレートを取り付けるための取付座の加工、並びにセパレートプレートの取付作業を行う必要がある。
【0016】
本発明の目的は、旋回台の旋回中心を挟むように配置された異なるケーブル部同士を交差させることがないとともに、前記ケーブル部同士の干渉を防止するためのセパレートプレートの製作及びセパレートプレートを取り付けるための取付座の加工、並びにセパレートプレートの取付作業が必要でない産業用ロボット及び産業用ロボットのケーブル部の配置方法を提供することにある。
【課題を解決するための手段】
【0017】
上記問題点を解決するために、請求項1に記載の発明は、基台に対して旋回可能に設けられた旋回台を備え、前記旋回台の旋回中心軸を挟む互いに反対側で前記基台内に配置された一対のケーブル部をそれぞれ上方へ折り返して、折り返し後の該一対のケーブル部の端を、前記旋回台内の一側壁側に共に寄せて配置する産業用ロボットにおいて、前記一対のケーブル部の内、前記一側壁側から遠位に位置する一方のケーブル部は、前記旋回中心軸の周りに沿って円弧状に配置して前記一側壁側に寄せて配置し、前記一側壁側から近位に位置する他方のケーブル部は、前記旋回中心軸の周りに沿って円弧状に配置し、さらに前記一方のケーブル部に近位の部位では該一方のケーブル部に干渉しないように回避して折り返すとともに前記一側壁に寄せて配置したことを特徴とする産業用ロボットを要旨としている。
【0018】
請求項2の発明は、請求項1において、前記一対のケーブル部は、共に柔軟性を有するコンジット内に配置されていることを特徴とする。
請求項3の発明は、請求項1又は請求項2において、前記他方のケーブル部は、前記一方のケーブル部よりも柔軟性が高いことを特徴とする。
【0019】
請求項4の発明は、請求項2において、前記他方のケーブル部は、前記旋回中心軸の周りに沿って円弧状に配置した後、さらに前記一方のケーブル部に近位の部位では、前記コンジットが除去されていることを特徴とする。
【0020】
請求項5の発明は、基台に対して旋回可能に設けられた旋回台を備え、前記旋回台の旋回中心軸を挟む互いに反対側で前記基台内に配置された一対のケーブル部をそれぞれ上方へ折り返して、折り返し後の該一対のケーブル部の端を、前記旋回台内の一側壁側に共に寄せて配置する産業用ロボットのケーブル部の配置方法において、前記一対のケーブル部の内、前記一側壁側から遠位に位置する一方のケーブル部は、前記旋回中心軸の周りに沿って円弧状に配置して前記一側壁側に寄せて配置し、前記一側壁側から近位に位置する他方のケーブル部は、前記旋回中心軸の周りに沿って円弧状に配置し、さらに前記一方のケーブル部に近位の部位では該一方のケーブル部に干渉しないように回避して折り返すとともに前記一側壁に寄せて配置することを要旨としている。
【発明の効果】
【0021】
請求項1の発明によれば、旋回台の旋回中心を挟むように配置された異なるケーブル部同士を交差させることがないとともに、前記ケーブル部同士の干渉を防止するためのセパレートプレートの製作及びセパレートプレートを取り付けるための取付座の加工、並びにセパレートプレートの取付作業が必要でない産業用ロボットを提供できる。
【0022】
請求項2の発明によれば、ケーブル部がコンジット内に配置された構成であっても、請求項1の効果を容易に実現できる。
請求項3の発明によれば、他方のケーブル部が、一方のケーブル部よりも柔軟性が高いことにより、他方のケーブル部を旋回中心軸の周りに沿って円弧状に配置した後、さらに一方のケーブル部に近位の部位では該一方のケーブル部に干渉しないように回避して折り返す場合、容易に折り返しが可能となる。
【0023】
請求項4の発明によれば、他方のケーブル部は、前記旋回中心軸の周りに沿って円弧状に配置した後、さらに前記一方のケーブル部に近位の部位では、前記コンジットが除去されていることにより、他方のケーブル部を旋回中心軸の周りに沿って円弧状に配置した後、さらに一方のケーブル部に近位の部位では該一方のケーブル部に干渉しないように回避して折り返す場合、容易に折り返しが可能となる。
【0024】
請求項5の発明によれば、セパレートプレートの製作及びセパレートプレートを取り付けるための取付座の加工、並びにセパレートプレートの取付作業が必要でない産業用ロボットのケーブル部の配置方法を提供できる。
【図面の簡単な説明】
【0025】
【図1】一実施形態の産業用ロボットの全体側面図。
【図2】一実施形態の産業用ロボットの要部側面図。
【図3】一実施形態の他方のケーブル部の配置状態を示す説明図。
【図4】一実施形態の基台及び旋回台の縦断面図。
【図5】一実施形態の基台の横断面図。
【図6】一実施形態の要部断面図。
【図7】(a)は、第2収納室におけるケーブル部の配置状態を示す説明図、(b)は、他の実施形態の第2収納室におけるケーブル部の配置状態を示す説明図。
【図8】従来例の産業用ロボットの要部側面図。
【図9】従来例の基台の横断面図。
【図10】従来例の基台及び旋回台の縦断面図。
【図11】図8のA−A線の要部断面図。
【図12】コンジット140とコンジット150の交差を示す説明図。
【発明を実施するための形態】
【0026】
以下、本発明の産業用ロボットを、6自由度を有する溶接ロボットに具体化した一実施形態を図1〜図7(a)を参照して説明する。
図1に示すように、マニピュレータ10の旋回台30は、基台20に対して第1回転軸心J1の周りに旋回可能に設けられている。前記旋回台30には前記第1回転軸心J1と直交する面内の第2回転軸心J2の周りに第1アームA1が回動可能に設けられている。又、前記第1アームA1の上端には第2回転軸心J2と平行の第3回転軸心J3の周りに第2アームA2が揺動可能に設けられている。
【0027】
さらに、第2アームA2の先端部には、第3回転軸心J3と直交する面内の第4回転軸心J4の周りに胴体A3が回動可能に設けられている。又、前記胴体A3の先端部には手首部を構成する揺動体A4が取り付けられて、第4回転軸心J4(手首第1軸)に直交する面内の第5回転軸心J5周りに揺動する。
【0028】
揺動体A4には、回転体200が取り付けられて第5回転軸心J5に直交する面内の第6回転軸心J6周りに回転する。回転体200には作業ツールとしての溶接トーチ210が取り付けられている。マニピュレータ10の第1回転軸心J1乃至第6回転軸心J6には、駆動モータが設けられていて、図示しないロボット制御装置からの指令(制御信号)を入力して駆動される。
【0029】
次に、基台20及び旋回台30内に収納されるケーブル部の配置構造について説明する。
図4に示すように旋回台30内には駆動モータMの出力軸が基台20に固定された減速機29と作動連結されており、駆動モータMが回転駆動されると、旋回台30は第1回転軸心J1の周りで旋回動作する。
【0030】
また、基台20は、図5に示すように側壁21により形成された収納空間23を有する。側壁21には収納空間23に連通する開口26が形成され、閉塞板28により閉塞されている。図4に示すように収納空間23において、減速機29の下方周辺は略円形リング状をなす収納凹部24が形成されている。
【0031】
収納空間23及び収納凹部24において、図3〜図6に示すように旋回台30の第1回転軸心J1(すなわち、旋回中心軸)を中心にして一側方側にはケーブルを収納するとともに柔軟性を有するコンジット40が配置されている。コンジット40内に収納されたケーブルは、溶接用のパワーケーブルである。
【0032】
前記ケーブルの一端は、コンジット40の一端40a側において、基台20の開口26を閉塞する閉塞板28に設けられた端子盤25に接続されている。
前記コンジット40は、収納凹部24内に位置する下行部位40bと、開口26から遠位の収納凹部24の奥部で180度折り返されて、旋回台30内に収納される上行部位40cを有する。
【0033】
旋回台30は、側壁31及び底壁33により区画されることにより、図4に示すように減速機29の上方周辺に設けられた略リング状をなす収納凹部32と、図6に示すように収納凹部32と連通する第1収納室38と、第1収納室38に隣接するとともに、下行部位40bとは駆動モータMを挟んで反対側に位置する一側壁側には第2収納室39を有する。ここで、一側壁は、図2で示す旋回台30の側壁30a及び後述する閉塞板43に相当する。
【0034】
第2収納室39は、第1回転軸心J1(旋回中心軸)を中心にしてコンジット40の下行部位40bが位置する側とは反対側の側方に位置する。第2収納室39は、旋回台30における一側壁側に設けられた収納室に相当する。収納凹部32は、収納凹部24と相対するように、かつ第1回転軸心J1と同軸となるように形成されている。
【0035】
上行部位40cの先端は、図6に示すように収納凹部32内から第1収納室38に入り、第1収納室38の一方の側壁(図6では、第2収納室39側に位置する側壁)に向けて配置されている。すなわち、図6に示すように、上行部位40cは、第1回転軸心J1(旋回中心軸)の周りに沿って円弧状に配置されている。
【0036】
また、コンジット40のケーブル41の端部は、図6に示すように第2収納室39側に寄せて配置されて、第1収納室38の前記一方の側壁に固定された接続端子62に接続固定されている。
【0037】
なお、本実施形態では、上行部位40cの先端は、第1収納室38の側壁に対してブラケット63を介して取付けられている。本実施形態の上行部位40cのケーブル41は、大径のケーブルであり、本発明の一方のケーブル部に相当する。
【0038】
図1に示すように、接続端子62の外部端子には、パワーケーブルPCの下端が接続されている。パワーケーブルPCの上端は、第2アームA2内に導入され、図示しないワイヤ送給装置に接続されている。
【0039】
このように、前記コンジット40のケーブル41を接続する接続端子62の位置は、コンジット40を180度折り返す部位からは、旋回台30の旋回中心軸Sを挟むようにして遠位の位置にある。
【0040】
また、収納空間23及び収納凹部24において、図3〜図6に示すように旋回台30の第1回転軸心J1(旋回中心軸)を中心にして他側方側には複数のケーブル51を収納するとともに柔軟性を有するコンジット50が配置されている。コンジット50内に収納されたケーブル51は、ロボットを制御するための各種信号用のケーブルや、産業用ロボットの各アームを駆動する駆動モータの電源ケーブルである。本実施形態の複数のケーブル51は、ケーブル41よりも径が小径であってケーブル41よりも柔軟性が高くされている。
【0041】
本実施形態の複数のケーブル51により、本発明の他方のケーブル部が構成されている。また、一方のケーブル部を収納したコンジット40を折り返す場合よりも他方のケーブル部を収納したコンジット50の方が、柔軟性が高くするようにコンジット50及びケーブル51が選定されている。
【0042】
コンジット50内の各ケーブル51の一端は、コンジット50の一端50a側において、基台20の閉塞板28に設けられた端子盤27に接続されている。前記コンジット50は、収納凹部24内に位置する下行部位50bと、図3に示すように開口26から遠位の収納凹部24の奥部で180度折り返されて、旋回台30内に収納される上行部位50cを有する。
【0043】
上行部位50cは、図6、図7(a)に示すように収納凹部32から駆動モータMの円弧状の周面に沿うように円弧状となって第1収納室38内へ導入されるとともに、第2収納室39側に寄せて配置されている。すなわち、上行部位50cは第1回転軸心J1(旋回中心軸)の周りに沿って円弧状に配置されるとともに、コンジット40の上行部位40cに到達しないように上行部位40cに近位の部位で図3、図6に示すように折り返されて、折り返された部位50dが第2収納室39内に導入されている。さらに、第2収納室39内に導入されたコンジット50の部位は第2収納室39上の天井壁37に形成された導出溝37aを介して旋回台30の上方へ延出されている。
【0044】
なお、第2収納室39の一側方は開口39aが形成されており、開口39aの周壁には、開口39aを閉塞する閉塞板43が着脱自在にボルトにより取り付けられている。
旋回台30から外部に出たコンジット50は第1アームA1の上部まで延出されるとともに、コンジット50内の各ケーブルは第1アームA1の上部の図示しない導入孔を介して第1アームA1内に挿入されている。
【0045】
(実施形態の作用)
さて、上記のように構成された溶接ロボットの作用を説明する。
本実施形態のコンジット50の上行部位50cは、図6、図7(a)に示すように収納凹部32から駆動モータMの円弧状の周面に沿うように、すなわち、第1回転軸心J1(旋回中心軸)の周りに沿って円弧状に配置されるとともに、コンジット40の上行部位40cに到達しないように上行部位40cに近位の部位で図3、図6に示すように折り返される。そして、折り返された部位50dが第2収納室39内に導入されている。
【0046】
すなわち、コンジット50の上行部位50c内のケーブル部(ケーブル51)は上行部位50cが円弧状となることにより、コンジット50に規制されて同様に第1回転軸心J1(旋回中心軸)の周りに沿って円弧状に配置される。
【0047】
このため、従来と異なり、コンジット40とコンジット50とが交差することはないため、両ケーブル部の干渉を防止するためのセパレートプレートが不要となる。またセパレートプレートが不要のため、従来と異なり取付座を第2収納室39に設ける必要もなく。さらにセパレートプレートを取付る作業も必要でなくなる。
【0048】
また、本実施形態では、コンジット40のケーブル部(ケーブル41)よりもコンジット50のケーブル部(ケーブル51)の方が柔軟性があるため、コンジット40の上行部位40cに到達しないように上行部位40cに近位の部位で図3、図6に示すようにコンジット50の上行部位50cを折り返す作業を容易に行うことができる。
【0049】
また、本実施形態では、コンジット40の上行部位40cが円弧状に配置されるとともにその端部からケーブル41が延長されて、その延長方向に沿って接続端子162を配置することができる。ここで、コンジット40の上行部位40c内のケーブル部(ケーブル41)は上行部位40cが円弧状となることにより、コンジット40に規制されて同様に第1回転軸心J1(旋回中心軸)の周りに沿って円弧状に配置される。
【0050】
すなわち、コンジット50の上行部位50cがケーブル41に干渉しないように折り返されるため、駆動モータMの周囲にスペースができ、このスペースを利用して、上行部位40cの端部からケーブル41が延長させることが可能となり、図11に示す従来例よりも、第1回転軸心J1からは比較的近い位置に接続端子62を配置することができる。
【0051】
一方、従来例の図11では、コンジット150の上行部位150cが駆動モータ120の周囲に沿って円弧状に配置されるとともに直線状に延出されて第2収納室119に隣接する端子ボックス160の接続端子162にコンジット150内のケーブルが接続される構成となっている。
【0052】
ここで、図6において、L1を第1回転軸心J1から接続端子62のパワーケーブルPC用の端子までの距離し、図11において、L2を旋回中心軸Sから接続端子162のパワーケーブルPCを接続するための端子までの距離とする。
【0053】
従来例では、第2収納室119内においてコンジット同士が交差するため、第2収納室119では、接続端子162を配置するスペースがなく、旋回中心軸Sから離間した位置に接続端子162を配置するためである。
【0054】
このため、駆動モータM,120が同一出力で、同一の径とし、従来と本実施形態の各コンジットが同じ径である場合、L1<L2となる。
本実施形態によれば、下記の特徴がある。
【0055】
(1) 本実施形態の溶接ロボットは、基台20に対して旋回可能に設けられた旋回台30を備え、旋回台30の第1回転軸心J1(旋回中心軸)を挟む互いに反対側で基台20内に配置された一対のケーブル部(ケーブル41、51)をそれぞれ上方へ折り返すとともに該一対のケーブル部の端を、旋回台30内の一側壁側、すなわち、第2収納室39側に共に寄せて配置している。
【0056】
そして、一対のケーブル部(ケーブル41、51)の内、前記一側壁側から遠位に位置する一方のケーブル部(ケーブル41)は、第1回転軸心J1(旋回中心軸)の周りに沿って円弧状に配置して前記一側壁側に寄せて配置している。
【0057】
また、一側壁側から近位に位置する他方のケーブル部(ケーブル51)は、第1回転軸心J1(旋回中心軸)の周りに沿って円弧状に配置し、さらに一方のケーブル部(ケーブル41)に近位の部位ではケーブル41に干渉しないように回避して折り返すとともに一側壁に寄せて配置した。
【0058】
この結果、旋回台の旋回中心軸を挟むように配置された異なるケーブル部同士を交差させることがないとともに、前記ケーブル部同士の干渉を防止するためのセパレートプレートの製作及びセパレートプレートを取り付けるための取付座の加工、並びにセパレートプレートの取付作業が必要でなくなる効果を奏する。
【0059】
(2) 本実施形態では、一対のケーブル部(ケーブル41、51)は、共に柔軟性を有するコンジット内に配置されている。このため、本実施形態によれば、ケーブル部がコンジット内に配置された構成であっても、上記(1)の効果を容易に実現できる。
【0060】
(3) 本実施形態では、ケーブル51(他方のケーブル部)は、ケーブル41(一方のケーブル部)よりも柔軟性が高くされている。
この結果、本実施形態によれば、ケーブル51を第1回転軸心J1(旋回中心軸)の周りに沿って円弧状に配置した後、さらにケーブル41(一方のケーブル部)に近位の部位では該一方のケーブル部に干渉しないように回避して折り返す場合、容易に折り返しが可能となる。
【0061】
(4) 本実施形態のケーブル部の配置方法では、一対のケーブル部(ケーブル41、51)の内、前記一側壁側から遠位に位置する一方のケーブル部(ケーブル41)は、第1回転軸心J1(旋回中心軸)の周りに沿って円弧状に配置して前記一側壁側に寄せて配置し、一側壁側から近位に位置する他方のケーブル部(ケーブル51)は、第1回転軸心J1(旋回中心軸)の周りに沿って円弧状に配置し、さらに一方のケーブル部(ケーブル41)に近位の部位ではケーブル41に干渉しないように回避して折り返すとともに一側壁に寄せて配置する。
【0062】
この結果、本実施形態では、旋回台の旋回中心軸を挟むように配置された異なるケーブル部同士を交差させることがないとともに、前記ケーブル部同士の干渉を防止するためのセパレートプレートの製作及びセパレートプレートを取り付けるための取付座の加工、並びにセパレートプレートの取付作業が必要でなくなるケーブル部の配置方法を提供できる。
【0063】
なお、本発明は前記実施形態に限定されるものではなく、下記のように構成してもよい。
・ 前記実施形態において、コンジット50の上行部位50cでは、コンジット40の上行部位40cに到達しないように上行部位40cに近位の部位で図3、図6に示すように折り返されて、折り返された部位50dが第2収納室39内に導入されている。この代わりに、図7(b)に示すように、上行部位50cにおいてケーブル41に対向する部位ではコンジット50を除去してケーブル51を露出し、露出したケーブル51を折り返して第2収納室39内に導入した後、再び第2収納室39内において、コンジット50内にケーブル51を挿入配置し、その後、天井壁37の導出溝37aから外部へ導出するようにしてもよい。
【0064】
・ 前記実施形態では、コンジット40内には、ケーブル部として単一のケーブル41を挿入したが、単一のケーブルに限定するものではなく、複数のケーブルを挿入するようにしてもよい。
【0065】
・ 前記実施形態では、他方のケーブル部(ケーブル51)は、一方のケーブル部(ケーブル41)よりも柔軟性が高くしたが、逆の関係であってもよい。又、同等の柔軟性をそれぞれのケーブル部が有するようにしてもよい。
【0066】
・ 前記実施形態では、コンジット40内には、ケーブル部として単一のケーブル41を挿入したが、コンジット50内のケーブル部を逆に単一のケーブルとしてもよい。
・ 前記実施形態では、コンジット40、50を設けたが、コンジット40、50を省略してもよい、この場合はケーブル部が複数のケーブルで構成されている場合は、ケーブルをバインドで束ねるようにしてもよい。
【0067】
・ 前記実施形態では、産業用ロボットとして溶接ロボットに具体化したが、他の産業用ロボットに適用できることはいうまでもない。
・ 前記実施形態では、6自由度の溶接ロボットに具体化したが、基台と旋回台を有するロボットであれば、ロボットの種類は限定されるものではない。
【符号の説明】
【0068】
10…マニピュレータ、20…基台、30…旋回台、
40…コンジット、40c…上行部位、41…ケーブル(ケーブル部)、
50…コンジット、50c…上行部位、51…ケーブル(ケーブル部)、
J1…第1回転軸心(旋回中心軸)。
【特許請求の範囲】
【請求項1】
基台に対して旋回可能に設けられた旋回台を備え、前記旋回台の旋回中心軸を挟む互いに反対側で前記基台内に配置された一対のケーブル部をそれぞれ上方へ折り返して、折り返し後の該一対のケーブル部の端を、前記旋回台内の一側壁側に共に寄せて配置する産業用ロボットにおいて、
前記一対のケーブル部の内、前記一側壁側から遠位に位置する一方のケーブル部は、前記旋回中心軸の周りに沿って円弧状に配置して前記一側壁側に寄せて配置し、
前記一側壁側から近位に位置する他方のケーブル部は、前記旋回中心軸の周りに沿って円弧状に配置し、さらに前記一方のケーブル部に近位の部位では該一方のケーブル部に干渉しないように回避して折り返すとともに前記一側壁に寄せて配置したことを特徴とする産業用ロボット。
【請求項2】
前記一対のケーブル部は、共に柔軟性を有するコンジット内に配置されていることを特徴とする請求項1に記載の産業用ロボット。
【請求項3】
前記他方のケーブル部は、前記一方のケーブル部よりも柔軟性が高いことを特徴とする請求項1又は請求項2に記載の産業用ロボット。
【請求項4】
前記他方のケーブル部は、前記旋回中心軸の周りに沿って円弧状に配置した後、さらに前記一方のケーブル部に近位の部位では、前記コンジットが除去されていることを特徴とする請求項2に記載の産業用ロボット。
【請求項5】
基台に対して旋回可能に設けられた旋回台を備え、前記旋回台の旋回中心軸を挟む互いに反対側で前記基台内に配置された一対のケーブル部をそれぞれ上方へ折り返して、折り返し後の該一対のケーブル部の端を、前記旋回台内の一側壁側に共に寄せて配置する産業用ロボットのケーブル部の配置方法において、
前記一対のケーブル部の内、前記一側壁側から遠位に位置する一方のケーブル部は、前記旋回中心軸の周りに沿って円弧状に配置して前記一側壁側に寄せて配置し、
前記一側壁側から近位に位置する他方のケーブル部は、前記旋回中心軸の周りに沿って円弧状に配置し、さらに前記一方のケーブル部に近位の部位では該一方のケーブル部に干渉しないように回避して折り返すとともに前記一側壁に寄せて配置することを特徴とする産業用ロボットのケーブル部の配置方法。
【請求項1】
基台に対して旋回可能に設けられた旋回台を備え、前記旋回台の旋回中心軸を挟む互いに反対側で前記基台内に配置された一対のケーブル部をそれぞれ上方へ折り返して、折り返し後の該一対のケーブル部の端を、前記旋回台内の一側壁側に共に寄せて配置する産業用ロボットにおいて、
前記一対のケーブル部の内、前記一側壁側から遠位に位置する一方のケーブル部は、前記旋回中心軸の周りに沿って円弧状に配置して前記一側壁側に寄せて配置し、
前記一側壁側から近位に位置する他方のケーブル部は、前記旋回中心軸の周りに沿って円弧状に配置し、さらに前記一方のケーブル部に近位の部位では該一方のケーブル部に干渉しないように回避して折り返すとともに前記一側壁に寄せて配置したことを特徴とする産業用ロボット。
【請求項2】
前記一対のケーブル部は、共に柔軟性を有するコンジット内に配置されていることを特徴とする請求項1に記載の産業用ロボット。
【請求項3】
前記他方のケーブル部は、前記一方のケーブル部よりも柔軟性が高いことを特徴とする請求項1又は請求項2に記載の産業用ロボット。
【請求項4】
前記他方のケーブル部は、前記旋回中心軸の周りに沿って円弧状に配置した後、さらに前記一方のケーブル部に近位の部位では、前記コンジットが除去されていることを特徴とする請求項2に記載の産業用ロボット。
【請求項5】
基台に対して旋回可能に設けられた旋回台を備え、前記旋回台の旋回中心軸を挟む互いに反対側で前記基台内に配置された一対のケーブル部をそれぞれ上方へ折り返して、折り返し後の該一対のケーブル部の端を、前記旋回台内の一側壁側に共に寄せて配置する産業用ロボットのケーブル部の配置方法において、
前記一対のケーブル部の内、前記一側壁側から遠位に位置する一方のケーブル部は、前記旋回中心軸の周りに沿って円弧状に配置して前記一側壁側に寄せて配置し、
前記一側壁側から近位に位置する他方のケーブル部は、前記旋回中心軸の周りに沿って円弧状に配置し、さらに前記一方のケーブル部に近位の部位では該一方のケーブル部に干渉しないように回避して折り返すとともに前記一側壁に寄せて配置することを特徴とする産業用ロボットのケーブル部の配置方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2013−111710(P2013−111710A)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2011−260561(P2011−260561)
【出願日】平成23年11月29日(2011.11.29)
【出願人】(000000262)株式会社ダイヘン (990)
【Fターム(参考)】
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成23年11月29日(2011.11.29)
【出願人】(000000262)株式会社ダイヘン (990)
【Fターム(参考)】
[ Back to top ]