
産業用ロボット
【課題】温度の高い比較的大型の搬送対象物を搬送する場合であっても、熱の影響による軸受の摩耗や損傷を抑制すること、熱の影響によるアームの変形を抑制すること、および、ハンドの重量を軽減することが可能な産業用ロボットを提供する。
【解決手段】この産業用ロボットは、搬送対象物が搭載される搭載部27を有するハンド3と、その先端側でハンド3を保持するアームと、アームの基端側を保持する本体部と、搭載部27の少なくとも上面を覆うカバー部材30とを備えている。カバー部材30における輻射熱の反射率は、搭載部27における輻射熱の反射率よりも高く、カバー部材30の熱伝導率は、搭載部27の熱伝導率よりも低く、搭載部27の比重は、カバー部材30の比重よりも小さくなっている。
【解決手段】この産業用ロボットは、搬送対象物が搭載される搭載部27を有するハンド3と、その先端側でハンド3を保持するアームと、アームの基端側を保持する本体部と、搭載部27の少なくとも上面を覆うカバー部材30とを備えている。カバー部材30における輻射熱の反射率は、搭載部27における輻射熱の反射率よりも高く、カバー部材30の熱伝導率は、搭載部27の熱伝導率よりも低く、搭載部27の比重は、カバー部材30の比重よりも小さくなっている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、所定の搬送対象物を搬送する産業用ロボットに関する。
【背景技術】
【0002】
従来、半導体製造装置等において、減圧された高温のチャンバー等に対して半導体ウエハ等の被乾燥物を出し入れするための耐熱ロボットハンドが知られている(たとえば、特許文献1参照)。特許文献1に記載のロボットハンドは、断熱構造の受け座を介して被乾燥物を支持するハンド部と、ハンド部の上面に配置され断熱支持手段を介してハンド部に支持される反射板とを備えている。また、このロボットハンドは、ロボットハンドをチャンバーに出し入れするためのアームに断熱カラーを介して取り付けられている。特許文献1に記載のロボットハンドでは、受け座、反射板、断熱支持部材および断熱カラーの作用によって、ロボットハンドからアームへ伝達される熱量を低減することが可能となっている。
【0003】
また、従来、液晶ディスプレイ用のガラス基板を搬送する産業用ロボットが知られている(たとえば、特許文献2参照)。特許文献2に記載の産業用ロボットは、ガラス基板が搭載されるハンドと、その先端側にハンドが回動可能に連結されるアームと、アームの基端側が回動可能に連結される本体部とを備えている。アームは、第1アーム部と第2アーム部とによって構成されており、第1アーム部の基端側は本体部に回動可能に連結され、第2アーム部の基端側は第1アーム部の先端側に回動可能に連結されている。本体部と第1アーム部との連結部となる関節部には、第1アーム部を回動可能に支持する転がり軸受が配置され、第1アーム部と第2アーム部との連結部となる関節部には、第2アーム部を回動可能に支持する転がり軸受が配置されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平6−204316号公報
【特許文献2】特開2010−23195号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
近年、特許文献2に記載の産業用ロボットで搬送されるガラス基板は大型化しており、かつ、搬送時におけるガラス基板の温度が高くなる傾向にあるため、搬送されるガラス基板が持つ熱量が大きくなってきている。ハンドを介した熱伝導によってガラス基板からアームへ高い熱が伝わって、関節部に配置される軸受に高い熱がかかると、焼入れされている軸受の硬度が低下したり、軸受内のグリースの粘度が低下して油膜が切れるおそれがあるため、軸受が摩耗しやすくなったり、損傷しやすくなったりするおそれがある。また、ハンドを介した熱伝導によってガラス基板からアームに高い熱が伝わると、アームが大きく変形するおそれがあり、その結果、ガラス基板の搬送精度が低下するおそれがある。
【0006】
特許文献1に記載の耐熱ロボットハンドの構成を特許文献2に記載の産業用ロボットに用いれば、ハンドを介した熱伝導によってガラス基板からアームに伝達される熱量を低減することが可能になり、その結果、関節部に配置される軸受が過度に摩耗、損傷したり、アームが大きく変形するといった問題は生じにくくなる。しかしながら、特許文献1に記載の耐熱ロボットハンドは、半導体ウエハのような比較的小型の搬送対象物を搬送する産業用ロボットに用いられるものであり、特許文献1では、液晶ディスプレイ用のガラス基板のように比較的大型の搬送対象物を搬送する産業用ロボットにおいて、熱の影響による軸受の摩耗や損傷を抑制したり、熱の影響によるアームの変形を抑制するための具体的な構成は提案されていない。
【0007】
そこで、本発明の課題は、温度の高い比較的大型の搬送対象物を搬送する場合であっても、熱の影響による軸受の摩耗や損傷を抑制すること、熱の影響によるアームの変形を抑制すること、および、ハンドの重量を軽減することが可能な産業用ロボットを提供することにある。
【課題を解決するための手段】
【0008】
上記の課題を解決するため、本発明の産業用ロボットは、搬送対象物を搬送する産業用ロボットにおいて、搬送対象物が搭載される搭載部を有するハンドと、その先端側でハンドを保持するアームと、アームの基端側を保持する本体部と、搭載部の少なくとも上面を覆うカバー部材とを備え、カバー部材における輻射熱の反射率は、搭載部における輻射熱の反射率よりも高く、カバー部材の熱伝導率は、搭載部の熱伝導率よりも低く、搭載部の比重は、カバー部材の比重よりも小さいことを特徴とする。
【0009】
本発明の産業用ロボットは、搬送対象物が搭載される搭載部を有するハンドと、搭載部の少なくとも上面を覆うカバー部材とを備えており、カバー部材における輻射熱の反射率は、搭載部における輻射熱の反射率よりも高く、かつ、カバー部材の熱伝導率は、搭載部の熱伝導率よりも低くなっている。そのため、本発明では、熱放射(熱輻射)や熱伝導によって搬送対象物から搭載部へ伝達される熱量を、カバー部材によって低減することが可能になり、その結果、ハンドを介した熱伝導によって搬送対象物からアームに伝達される熱量を低減することが可能になる。したがって、本発明では、温度の高い搬送対象物を搬送する場合であっても、熱の影響による軸受の摩耗や損傷を抑制すること、および、熱の影響によるアームの変形を抑制することが可能になる。
【0010】
また、本発明では、搭載部の比重は、カバー部材の比重よりも小さくなっている。したがって、本発明では、比較的大型の搬送対象物を搬送するためにハンドが大型化しても、ハンドの重量を軽減することが可能になる。すなわち、搭載部を構成する材料がカバー部材を構成する材料と同じ材料であっても、ハンドを介した熱伝導によって搬送対象物からアームに伝達される熱量を低減することは可能になるが、この場合、比較的大型の搬送対象物を搬送するためにハンドが大型化すると、ハンドの重量が重くなる。これに対して、本発明では、比較的大型の搬送対象物を搬送するためにハンドが大型化しても、ハンドの重量を軽減することが可能になる。
【0011】
本発明において、カバー部材は、搭載部の上面および側面を覆っていることが好ましい。このように構成すると、熱放射によって搬送対象物から搭載部へ伝達される熱量を効果的に低減することが可能になる。
【0012】
本発明において、たとえば、搭載部は、セラミックで形成され、カバー部材は、ステンレス鋼板で形成されている。また、本発明において、たとえば、ハンドは、複数のフォークと、複数のフォークの基端側が固定されるとともにアームの先端側に保持されるハンド基部とを備え、フォークの少なくとも先端側部分が搭載部となっている。
【0013】
本発明において、フォークは、搭載部としてのフォーク先端部と、フォーク先端部の基端側が固定されるフォーク基端部とを備え、フォーク基端部の少なくとも一部は、中空状に形成されていることが好ましい。このように構成すると、フォーク基端部の少なくとも一部の断面積が小さくなるため、フォーク基端部の少なくとも一部における熱伝導経路が狭くなる。したがって、搬送対象物が搭載されるフォーク先端部からアームの先端側に保持されるハンド基部へ熱伝導によって伝達される熱量を効果的に低減することが可能になり、その結果、熱伝導によってハンドからアームに伝達される熱量を効果的に低減することが可能になる。また、このように構成すると、フォーク基端部の重量を軽減しつつ、フォーク基端部の強度を確保することが可能になる。なお、特許文献1では、フォークを有するハンドを備える産業用ロボットにおいて、熱の影響による軸受の摩耗や損傷を抑制したり、熱の影響によるアームの変形を抑制するための具体的な構成は提案されていない。
【0014】
本発明において、フォーク基端部における輻射熱の反射率は、フォーク先端部における輻射熱の反射率よりも高く、フォーク基端部の熱伝導率は、フォーク先端部の熱伝導率よりも低く、フォーク先端部の比重は、フォーク基端部の比重よりも小さいことが好ましい。このように構成すると、カバー部材によってフォーク基端部が覆われていなくても、熱放射や熱伝導によって搬送対象物からハンド基部へ伝達される熱量を低減することが可能になり、その結果、ハンドを介した熱伝導によって搬送対象物からアームに伝達される熱量を効果的に低減することが可能になる。
【0015】
本発明において、たとえば、フォーク先端部は、セラミックで形成され、フォーク基端部の少なくとも一部は、ステンレス鋼管で形成されている。
【0016】
本発明において、産業用ロボットは、アームの少なくとも上面を覆う第2のカバー部材を備え、第2のカバー部材の熱伝導率は、アームの熱伝導率よりも低くなっていることが好ましい。このように構成すると、熱放射によって搬送対象物からアームに伝達される熱量を、第2のカバー部材によって低減することが可能になる。なお、特許文献1では、熱放射によって搬送対象物からアームに伝達される熱量を低減するための具体的な構成は提案されていない。
【0017】
本発明において、搬送対象物は、たとえば、液晶ディスプレイ用のガラス基板である。上述のように、近年、産業用ロボットで搬送されるガラス基板が持つ熱量が大きくなってきているが、本発明では、搬送されるガラス基板が持つ熱量が大きくても、熱の影響による軸受の摩耗や損傷を抑制すること、および、熱の影響によるアームの変形を抑制することが可能になる。また、近年、搬送されるガラス基板は大型化しているが、本発明では、搬送されるガラス基板が大型化して、その結果、ハンドが大型化しても、ハンドの重量を軽減することが可能になる。
【発明の効果】
【0018】
以上のように、本発明の産業用ロボットでは、温度の高い比較的大型の搬送対象物を搬送する場合であっても、熱の影響による軸受の摩耗や損傷を抑制すること、熱の影響によるアームの変形を抑制すること、および、ハンドの重量を軽減することが可能になる。
【図面の簡単な説明】
【0019】
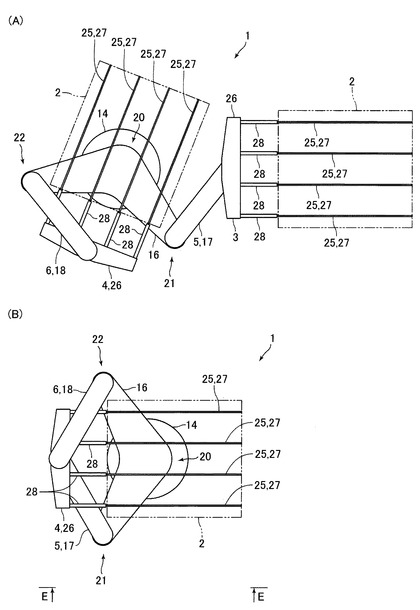
【図1】本発明の実施の形態にかかる産業用ロボットの平面図である。
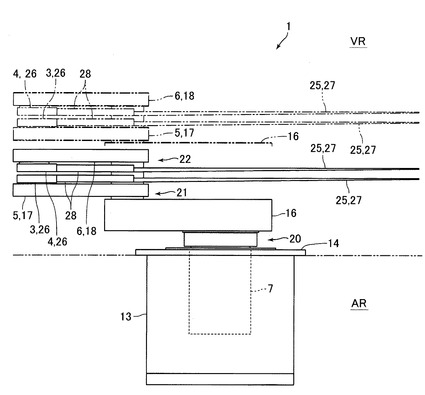
【図2】図1(B)のE−E方向から産業用ロボットを示す側面図である。
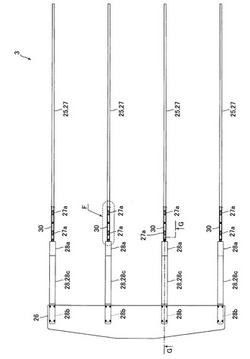
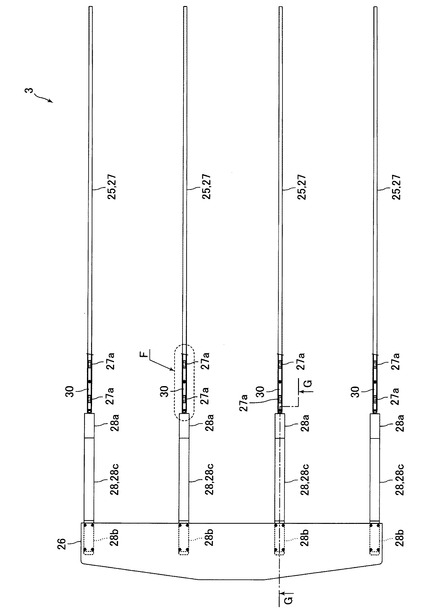
【図3】図1に示すハンドの平面図である。
【図4】(A)は、図3のF部の拡大図であり、(B)は、図3のG−G断面の断面図である。
【図5】図4(A)のH−H断面の断面図である。
【図6】図4(A)のJ−J断面の断面図である。
【図7】(A)は、本発明の他の実施の形態にかかる第1アーム部の周辺部を示す概略図であり、(B)は、本発明の他の実施の形態にかかる第2アーム部の周辺部を示す概略図である。
【発明を実施するための形態】
【0020】
以下、図面を参照しながら、本発明の実施の形態を説明する。
【0021】
(産業用ロボットの概略構成)
図1は、本発明の実施の形態にかかる産業用ロボット1の平面図である。図2は、図1(B)のE−E方向から産業用ロボット1を示す側面図である。
【0022】
本形態の産業用ロボット1(以下、「ロボット1」とする。)は、搬送対象物である液晶ディスプレイ用のガラス基板2(以下、「基板2」とする。)を搬送するためのロボットである。本形態のロボット1は、特に大型の基板2の搬送に適した大型のロボットであり、たとえば、1辺が2.5m程度の矩形状の基板2を搬送する。また、ロボット1は、比較的温度の高い基板2の搬送に適したロボットであり、たとえば、500℃程度の基板2を搬送する。また、ロボット1は、真空中で基板2を搬送する。
【0023】
図1、図2に示すように、ロボット1は、基板2が搭載される2個のハンド3、4と、ハンド3がその先端側に回動可能に連結されるアーム5と、ハンド4がその先端側に回動可能に連結されるアーム6と、アーム5、6の基端側が回動可能に連結される本体部7と、本体部7を昇降させる昇降機構(図示省略)とを備えている。本体部7および昇降機構は、略有底円筒状に形成されたケース13の中に収容されている。ケース13の上端には、円板状に形成されたフランジ14が固定されている。フランジ14には、本体部7の上端側部分が配置される貫通孔が形成されている。
【0024】
ハンド3、4およびアーム5、6は、本体部7の上側に配置されている。また、ハンド3、4およびアーム5、6は、フランジ14の上側に配置されている。ロボット1は、上述のように、真空中で基板2を搬送するためのロボットであり、図2に示すように、ロボット1の、フランジ14の下端面よりも上側の部分は、真空領域VRの中(真空中)に配置されている。一方、ロボット1の、フランジ14の下端面よりも下側の部分は、大気領域ARの中(大気中)に配置されている。
【0025】
アーム5は、第1アーム部16と第2アーム部17とによって構成されている。また、アーム6は、アーム5と共通の第1アーム部16と第2アーム部18とによって構成されている。第1アーム部16は、二股状に形成されている。具体的には、第1アーム部16は、略V形状に形成されている。第1アーム部16および第2アーム部17、18は、アルミニウム合金で形成されている。
【0026】
第1アーム部16の基端側は、本体部7に回動可能に保持されている。二股状に形成される第1アーム部16の一方の先端側に、第2アーム部17が回動可能に保持され、第1アーム部16の他方の先端側に、第2アーム部18が回動可能に保持されている。第2アーム部17の先端側には、ハンド3が回動可能に保持され、第2アーム部18の先端側には、ハンド4が回動可能に保持されている。
【0027】
アーム5、6と本体部7との連結部(すなわち、第1アーム部16と本体部7との連結部)は、第1関節部20となっている。第1関節部20には、真空領域VRへの空気の流入を防ぐ磁性流体シール(図示省略)が配置されている。第1アーム部16と第2アーム部17との連結部は、第2関節部21となっており、第1アーム部16と第2アーム部18との連結部は、第2関節部22となっている。第2関節部21には、第2アーム部17を回動可能に支持する転がり軸受(図示省略)が配置され、第2関節部22には、第2アーム部18を回動可能に支持する転がり軸受(図示省略)が配置されている。
【0028】
本形態では、図2に示すように、水平方向から見たときに、第2アーム部17、18は、第1アーム部16よりも上側に配置されている。また、第2アーム部18は、第2アーム部17よりも上側に配置されている。また、水平方向から見たときに、ハンド3、4は、第2アーム部17と第2アーム部18との間に配置されている。具体的には、第2アーム部17の上面側にハンド3が連結され、第2アーム部18の下面側にハンド4が連結されており、水平方向から見たときに、ハンド3の上側にハンド4が配置されている。なお、アーム5、6が縮んでいるときに、ロボット1を上側から見ると、図1(B)に示すように、ハンド3とハンド4とが重なっている。
【0029】
ロボット1は、アーム5やアーム6を伸ばして、図示を省略する搬送用ラック内で基板2を搭載し、その後、アーム5やアーム6を縮めながら、搬送用ラックから基板2を搬出する。また、その後、ロボット1は、その方向を変えて、減圧された高温のチャンバー内へ(真空かつ高温のチャンバー内へ)基板2を搬入する。
【0030】
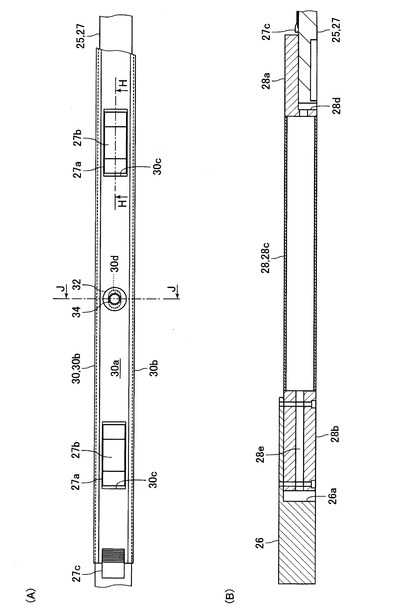
ハンド3、4は、基板2を搭載するための複数(たとえば、4本)のフォーク25と、複数のフォーク25の基端側が固定されるとともに第2アーム部17、18の先端側に回動可能に保持されるハンド基部26とから構成されている。フォーク25は、基板2が搭載されるフォーク先端部27と、フォーク先端部27の基端側が固定されるフォーク基端部28とから構成されている。フォーク先端部27は、フォーク25の先端側を構成し、フォーク基端部28は、フォーク25の基端側を構成している。本形態のフォーク先端部27は、搬送対象物である基板2が搭載される搭載部である。
【0031】
フォーク先端部27には、図3〜図6に示すように、フォーク先端部27の上面および側面を覆うカバー部材30が取り付けられている。以下、ハンド3およびカバー部材30の具体的な構成を説明する。なお、ハンド4は、ハンド3と同様に構成されているため、ハンド4の具体的な構成の説明は省略する。また、図1、図2では、カバー部材30の図示を省略している。
【0032】
(ハンドおよびカバー部材の構成)
図3は、図1に示すハンド3の平面図である。図4(A)は、図3のF部の拡大図であり、図4(B)は、図3のG−G断面の断面図である。図5は、図4(A)のH−H断面の断面図である。図6は、図4(A)のJ−J断面の断面図である。
【0033】
上述のように、ハンド3は、フォーク25とハンド基部26とから構成され、フォーク25は、フォーク先端部27とフォーク基端部28とから構成されている。
【0034】
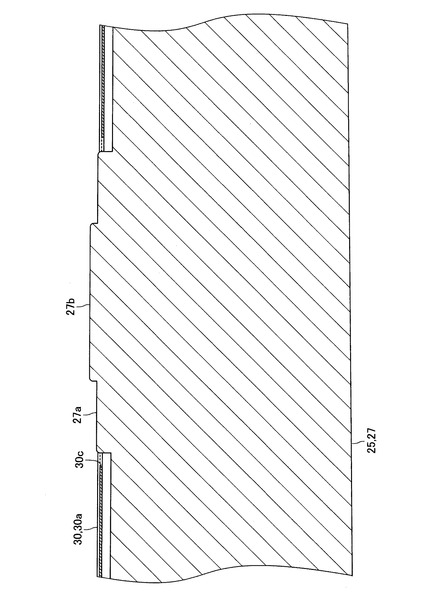
フォーク先端部27は、セラミックで形成されている。このフォーク先端部27は、中実のセラミックで形成されており、その内部には、空間が形成されていない。また、フォーク先端部27は、細長い略四角柱状に形成されている。フォーク先端部27の上面には、複数の凸部27aが上側に突出するように形成されている。複数の凸部27aは、フォーク25の長手方向において所定のピッチで形成されている。また、複数の凸部27aは、フォーク25の長手方向においてフォーク先端部27の全域に形成されている。また、フォーク先端部27の基端側の上面には、フォーク25の長手方向において基板2を位置決めするための位置決め用凸部27cが上側に突出するように形成されている。なお、図3では、複数の凸部27aのうちの一部の凸部27aのみを図示している。
【0035】
上側から見たときの凸部27aの形状は、フォーク25の長手方向に長い略長方形状となっている。凸部27aの上面27bは、平面状に形成されている。また、上面27bは、カバー部材30を構成する後述の上面部30aの上面よりも上側に配置されている。この上面27bは、基板2が搭載される搭載面となっており、上面27bには、基板2の下面が当接する。位置決め用凸部27cは、基板2の下面および基板2の端部が当接するように、階段状に形成されている。なお、凸部27aおよび位置決め用凸部27cが、フォーク先端部27と別体で形成されて、フォーク先端部27に固定されても良い。
【0036】
フォーク基端部28は、フォーク先端部27が固定される第1固定部28aと、ハンド基部26に固定される第2固定部28bと、第1固定部28aと第2固定部28bとを繋ぐ連結部28cとから構成されており、全体として、略四角柱状に形成されている。フォーク基端部28の長さは、フォーク先端部27の長さよりも短くなっている。また、フォーク基端部28の厚さは、フォーク先端部27の厚さよりも厚くなっており、フォーク基端部28の幅は、フォーク先端部27の幅よりも広くなっている。
【0037】
連結部28cは、ステンレス鋼管で形成されており、その内部に空間を有する中空状に形成されている。連結部28cの肉厚は、薄くなっており、たとえば、連結部28cの肉厚は、4mm程度である。第1固定部28aおよび第2固定部28bは、ステンレス鋼で形成されるとともに、フォーク25の外形に合わせて、略直方体のブロック状に形成されている。第1固定部28aと連結部28cとは、互いに溶接で固定され、第2固定部28bと連結部28cとは、互いに溶接で固定されている。なお、第1固定部28aと連結部28cとは溶接以外の方法で互いに固定されても良い。たとえば、第1固定部28aと連結部28cとは互いに接着で固定されても良いし、ボルト等を用いて固定されても良い。同様に、第2固定部28bと連結部28cとは溶接以外の方法で互いに固定されても良い。たとえば、第2固定部28bと連結部28cとは互いに接着で固定されても良いし、ボルト等を用いて固定されても良い。
【0038】
第1固定部28aの下面には、図4(B)に示すように、フォーク先端部27の基端側部分が配置される凹部28dが形成されており、フォーク先端部27の基端側部分は、凹部28dの中に配置された状態で、第1固定部28aに固定されている。第2固定部28bには、連結部28cの内側の空間に繋がる貫通孔28eが形成されている。第2固定部28bは、ハンド基部26の下面に形成される凹部26aの中に配置された状態で、ハンド基部26に固定されている。ハンド基部26は、アルミニウム合金またはステンレス鋼で形成されている。
【0039】
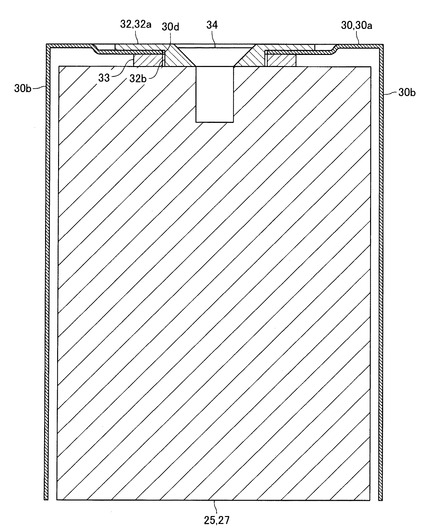
カバー部材30は、薄いステンレス鋼板で形成されている。また、カバー部材30は、ステンレス鋼板を略四角溝状に折り曲げることで形成されており、フォーク先端部27の上面を覆う上面部30aと、フォーク先端部27の側面を覆う2個の側面部30bとを備えている。上面部30aは、図6に示すように、フォーク25の長手方向に直交する方向における上面部30aの内側部分がその両端部よりもわずかに下側に配置されるように、折り曲げられている。2個の側面部30bは、フォーク25の長手方向に直交する方向における上面部30aの両端のそれぞれに繋がるように形成されている。
【0040】
上面部30aには、フォーク先端部27の凸部27aが配置される複数の配置孔30cが形成されている。複数の配置孔30cは、フォーク25の長手方向において所定のピッチで形成されている。配置孔30cは、上面部30aを貫通するように形成されており、凸部27aの上端側は、上面部30aよりも上側へ突出している。上側から見たときの配置孔30cの形状は、フォーク25の長手方向に長い略長方形状となっている。フォーク25の長手方向における配置孔30cの幅は、フォーク25の長手方向における凸部27aの幅よりも広くなっている。
【0041】
また、上面部30aには、カバー部材30をフォーク先端部27に取り付けるための複数の貫通孔30dが形成されている。複数の貫通孔30dは、フォーク25の長手方向において所定のピッチで形成されている。貫通孔30dは、上面部30aを貫通するように形成されている。上側から見たときの貫通孔30dの形状は、フォーク25の長手方向に長い長円形状となっている。
【0042】
カバー部材30は、図6に示すように、カラー32と、スペーサ33と、皿ネジ34とによって、フォーク先端部27に取り付けられている。カラー32は、鍔部32aと筒部32bとを有する扁平な鍔付きの略円筒状に形成されている。スペーサ33は、扁平な円筒状に形成されている。筒部32bは、カバー部材30の貫通孔30dの中に配置されており、その下端は、フォーク先端部27の上面に当接している。鍔部32aは、上面部30aの上側に配置されている。スペーサ33は、その下面がフォーク先端部27の上面に当接し、その上面が上面部30aの下面に当接するように、筒部32bの外周側に配置されている。カラー32の内周面は、皿ネジ34の頭部に係合する傾斜面となっており、フォーク先端部27の上面に形成されるネジ孔に皿ネジ34がねじ込まれることで、カバー部材30は、フォーク先端部27に固定されている。なお、本形態では、鍔部32aの下面が上面部30aの上面に軽く接触しているか、または、鍔部32aの下面と上面部30aの上面との間にわずかな隙間が形成されている。
【0043】
上述のように、スペーサ33の下面はフォーク先端部27の上面に当接し、スペーサ33の上面は上面部30aの下面に当接しているため、フォーク先端部27の上面と上面部30aの下面との間には、隙間が形成されている。また、フォーク25の長手方向に直交する方向における上面部30aの幅は、この方向におけるフォーク先端部27の幅よりも広くなっており、フォーク先端部27の側面と側面部30bとの間には、隙間が形成されている。上下方向における側面部30bの幅は、上下方向におけるフォーク先端部27の厚みと略等しくなっており、側面部30bは、フォーク先端部27の側面のほぼ全域を覆っている。また、上面部30aは、凸部27aおよび位置決め用凸部27cを除くフォーク先端部27の上面のほぼ全域を覆っている。
【0044】
本形態では、カバー部材30における輻射熱の反射率およびフォーク基端部28における輻射熱の反射率は、フォーク先端部27における輻射熱の反射率よりも高くなっている。また、上述のように、カバー部材30およびフォーク基端部28はステンレス鋼で形成され、フォーク先端部27はセラミックで形成されており、カバー部材30の熱伝導率およびフォーク基端部28の熱伝導率は、フォーク先端部27の熱伝導率よりも低くなっている。また、フォーク先端部27の比重は、カバー部材30の比重およびフォーク基端部28の比重よりも小さくなっている。
【0045】
(本形態の主な効果)
以上説明したように、本形態では、カバー部材30における輻射熱の反射率は、フォーク先端部27における輻射熱の反射率よりも高くなっており、かつ、カバー部材30の熱伝導率は、フォーク先端部27の熱伝導率よりも低くなっている。そのため、本形態では、熱放射によって基板2からフォーク先端部27に伝達される熱量をカバー部材30によって低減することが可能になる。特に本形態では、カバー部材30が、フォーク先端部27の上面に加え、フォーク先端部27の側面のほぼ全域を覆っているため、熱放射によって基板2からフォーク先端部27に伝達される熱量を効果的に低減することが可能になる。また、本形態では、フォーク先端部27の上面と上面部30aの下面との間に隙間が形成されるとともに、フォーク先端部27の側面と側面部30bとの間に隙間が形成されており、カバー部材30からフォーク先端部27への熱伝導経路がカラー32およびスペーサ33となっているため、熱放射によって基板2からカバー部材30に伝達された熱が熱伝導によってフォーク先端部27に伝達されるのを抑制することが可能になる。
【0046】
したがって、本形態では、ハンド3、4を介した熱伝導によって基板2からアーム5、6に伝達される熱量を低減することが可能になる。その結果、本形態では、熱量の大きな基板2を搬送する場合であっても、第2関節部21、22に配置される転がり軸受が熱の影響によって摩耗したり損傷したりするのを抑制することが可能になり、また、熱の影響によるアーム5、6の変形を抑制することが可能になる。
【0047】
本形態では、フォーク基端部28の連結部28cは、中空状に形成されており、連結部28cの断面積が小さくなっている。すなわち、本形態では、連結部28cにおける熱伝導経路が狭くなっている。そのため、本形態では、フォーク先端部27からハンド基部26へ熱伝導によって伝達される熱量を効果的に低減することが可能になり、その結果、熱伝導によってハンド3、4からアーム5、6に伝達される熱量を効果的に低減することが可能になる。
【0048】
また、本形態では、フォーク基端部28における輻射熱の反射率は、フォーク先端部27における輻射熱の反射率よりも高くなっており、かつ、フォーク基端部28の熱伝導率は、フォーク先端部27の熱伝導率よりも低くなっている。そのため、カバー部材30によってフォーク基端部28が覆われていなくても、熱放射によって基板2からハンド基部26へ伝達される熱量を低減することが可能になり、その結果、ハンド3、4を介した熱伝導によって基板2からアーム5、6に伝達される熱量を効果的に低減することが可能になる。
【0049】
本形態では、フォーク先端部27の比重は、カバー部材30の比重よりも小さくなっている。そのため、本形態では、比較的大型の基板2を搬送するためにハンド3、4が大型化しても、ハンド3、4の重量を軽減することが可能になる。すなわち、カバー部材30と同じステンレス鋼でフォーク先端部27が形成されている場合であっても、ハンド3、4を介した熱伝導によって基板2からアーム5、6に伝達される熱量を低減することが可能になるが、この場合、比較的大型の基板2を搬送するためにハンド3、4が大型化すると、ハンド3、4の重量が重くなる。これに対して、本形態では、ハンド3、4が大型化しても、ハンド3、4の重量を軽減することが可能になる。また、ステンレス鋼の線膨張率は、セラミックの線膨張率よりも大きいため、フォーク先端部27がステンレス鋼で形成されている場合には、フォーク先端部27が熱変形しやすくなるが、本形態では、フォーク先端部27がセラミックで形成されているため、フォーク先端部27の熱変形を抑制することが可能になる。
【0050】
本形態では、フォーク基端部28の連結部28cは、ステンレス鋼管で形成されている。そのため、本形態では、連結部28cの重量を軽減しつつ、連結部28cの剛性を確保することが可能になる。
【0051】
本形態では、フォーク25の長手方向におけるカバー部材30の配置孔30cの幅は、フォーク25の長手方向におけるフォーク先端部27の凸部27aの幅よりも広くなっている。また、本形態では、鍔部32aの下面が上面部30aの上面に軽く接触しているか、または、鍔部32aの下面と上面部30aの上面との間にわずかな隙間が形成されている。そのため、本形態では、フォーク先端部27の線膨張率とカバー部材30の線膨張率とが異なっていても、比較的温度の高い基板2が搭載されたときのフォーク先端部27およびカバー30の熱変形を抑制することが可能になる。
【0052】
(他の実施の形態)
上述した形態は、本発明の好適な形態の一例ではあるが、これに限定されるものではなく本発明の要旨を変更しない範囲において種々変形実施が可能である。
【0053】
上述した形態では、カバー部材30は、フォーク先端部27の側面のほぼ全域を覆っている。この他にもたとえば、カバー部材30は、フォーク先端部27の側面の一部を覆っていても良いし、フォーク先端部27の上面のみを覆って、フォーク先端部27の側面を覆っていなくても良い。また、フォーク先端部27の下面を覆うようにカバー部材30が構成されても良い。また、上述した形態では、スペーサ33を用いて、フォーク先端部27にカバー部材30が取り付けられているが、スペーサ33を使わずに、フォーク先端部27にカバー部材30が取り付けられても良い。この場合には、カバー部材30の上面部30aの下面は、フォーク先端部27の上面に当接する。
【0054】
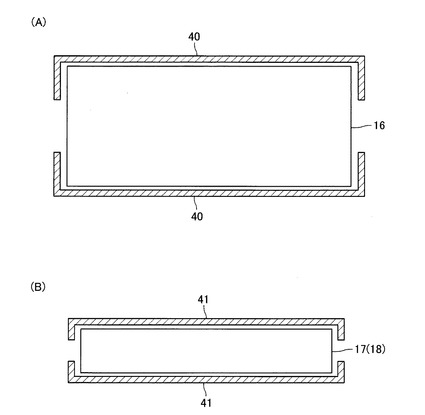
上述した形態において、第1アーム部16の上面および下面は、図7(A)に示すように、第1アーム部16よりも熱伝導率の低い第2のカバー部材としてのカバー部材40に覆われても良い。たとえば、第1アーム部16の上面および下面は、ステンレス鋼板で形成されるとともに上下方向から第1アーム部16を挟むように配置される2個のカバー部材40に覆われても良い。同様に、第2アーム部17、18の上面および下面は、図7(B)に示すように、第2アーム部17、18よりも熱伝導率の低い第2のカバー部材としてのカバー部材41に覆われても良い。たとえば、第2アーム部17、18の上面および下面は、ステンレス鋼板で形成されるとともに上下方向から第2アーム部17、18を挟むように配置される2個のカバー部材41に覆われても良い。この場合には、熱放射によって基板2からアーム5、6に伝達される熱量を、カバー部材40、41によって低減することが可能になる。
【0055】
なお、この場合には、熱伝導によるカバー部材40、41からアーム5、6への熱の伝達を抑制するため、カバー部材40、41とアーム5、6との間に隙間が形成されていることが好ましい。また、この場合には、カバー部材40、41は、図7に示すように、第1アーム部16や第2アーム部17、18の側面の一部を覆っていても良いし、第1アーム部16や第2アーム部17、18の側面の全体を覆っていても良い。また、カバー部材40、41は、第1アーム部16や第2アーム部17、18の側面を覆っていなくても良い。また、第1アーム部16や第2アーム部17、18は、その上側から1個のカバー部材40、41に覆われても良い。
【0056】
上述した形態では、フォーク25の先端側を構成するフォーク先端部27が、搬送対象物である基板2が搭載される搭載部となっている。この他にもたとえば、フォーク25の全体が、搬送対象物である基板2が搭載される搭載部となっていても良い。この場合には、たとえば、フォーク25の全体が中実のセラミックで形成され、フォーク25の全体がカバー部材30によって覆われる。
【0057】
上述した形態では、フォーク先端部27は、セラミックで形成され、カバー部材30は、ステンレス鋼板で形成されている。この他にもたとえば、カバー部材30における輻射熱の反射率がフォーク先端部27における輻射熱の反射率よりも高くなっており、カバー部材30の熱伝導率がフォーク先端部27の熱伝導率よりも低くなっており、かつ、フォーク先端部27の比重がカバー部材30の比重よりも小さくなっているのであれば、フォーク先端部27は、セラミック以外の材料で形成されても良いし、カバー部材30はステンレス鋼以外の材料で形成されても良い。たとえば、フォーク先端部27は、カーボン繊維入りの樹脂で形成されても良い。フォーク先端部27がカーボン繊維入りの樹脂で形成される場合には、フォーク先端部27は、たとえば、中空状に形成される。
【0058】
上述した形態では、フォーク基端部28の一部である連結部28cが中空状に形成されているが、フォーク基端部28の全体が中空状に形成されても良い。また、フォーク基端部28の全体が中実となっていても良い。また、上述した形態では、フォーク基端部28における輻射熱の反射率は、フォーク先端部27における輻射熱の反射率よりも高くなっているが、フォーク基端部28における輻射熱の反射率は、フォーク先端部27における輻射熱の反射率より低くても良いし、フォーク先端部27における輻射熱の反射率と同じであっても良い。また、フォーク基端部28の熱伝導率は、フォーク先端部27の熱伝導率よりも低くなっているが、フォーク基端部28の熱伝導率は、フォーク先端部27の熱伝導率より高くても良いし、フォーク先端部27の熱伝導率と同じであっても良い。さらに、フォーク基端部28の比重は、フォーク先端部27の比重よりも大きくなっているが、フォーク基端部28の比重は、フォーク先端部27の比重より小さくても良いし、フォーク先端部27の比重と同じであっても良い。
【0059】
上述した形態では、ハンド3、4は、フォーク25を備えているが、ハンド3、4は、フォーク25を備えていなくても良い。たとえば、ハンド3、4は、上側から見たときの形状が略Y形状となるように形成されても良いし、上述の特許文献1に開示されたハンド部のように、上側から見たときの形状が略長方形状となるように形成されても良い。この場合には、たとえば、ハンド3、4は、ハンド3、4の先端側を構成するハンド先端部と、ハンド3、4の基端側を構成するハンド基端部とを備えるとともに、ハンド先端部が中実のセラミック等で形成され、ハンド基端部が中空のステンレス鋼管等で形成されても良い。
【0060】
上述した形態では、アーム6は、アーム5と共通の第1アーム部16と第2アーム部18とによって構成されているが、アーム6は、第1アーム部16と別個に設けられた第1アーム部と第2アーム部18とによって構成されても良い。また、上述した形態では、アーム5、6は、第1アーム部16と第2アーム部17、18との2個のアーム部によって構成されているが、アーム5、6は、1個のアーム部によって構成されても良いし、3個以上のアーム部によって構成されても良い。
【0061】
上述した形態では、ロボット1によって搬送される搬送対象物は基板2であるが、ロボット1によって搬送される搬送対象物は半導体ウエハ等であっても良い。また、ロボット1は、真空中で基板2を搬送するが、ロボット1は、大気中で基板2を搬送しても良い。
【符号の説明】
【0062】
1 ロボット(産業用ロボット)
2 基板(ガラス基板、搬送対象物)
3、4 ハンド
5、6 アーム
7 本体部
25 フォーク
26 ハンド基部
27 フォーク先端部(搭載部)
28 フォーク基端部
30 カバー部材
40、41 第2のカバー部材
【技術分野】
【0001】
本発明は、所定の搬送対象物を搬送する産業用ロボットに関する。
【背景技術】
【0002】
従来、半導体製造装置等において、減圧された高温のチャンバー等に対して半導体ウエハ等の被乾燥物を出し入れするための耐熱ロボットハンドが知られている(たとえば、特許文献1参照)。特許文献1に記載のロボットハンドは、断熱構造の受け座を介して被乾燥物を支持するハンド部と、ハンド部の上面に配置され断熱支持手段を介してハンド部に支持される反射板とを備えている。また、このロボットハンドは、ロボットハンドをチャンバーに出し入れするためのアームに断熱カラーを介して取り付けられている。特許文献1に記載のロボットハンドでは、受け座、反射板、断熱支持部材および断熱カラーの作用によって、ロボットハンドからアームへ伝達される熱量を低減することが可能となっている。
【0003】
また、従来、液晶ディスプレイ用のガラス基板を搬送する産業用ロボットが知られている(たとえば、特許文献2参照)。特許文献2に記載の産業用ロボットは、ガラス基板が搭載されるハンドと、その先端側にハンドが回動可能に連結されるアームと、アームの基端側が回動可能に連結される本体部とを備えている。アームは、第1アーム部と第2アーム部とによって構成されており、第1アーム部の基端側は本体部に回動可能に連結され、第2アーム部の基端側は第1アーム部の先端側に回動可能に連結されている。本体部と第1アーム部との連結部となる関節部には、第1アーム部を回動可能に支持する転がり軸受が配置され、第1アーム部と第2アーム部との連結部となる関節部には、第2アーム部を回動可能に支持する転がり軸受が配置されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平6−204316号公報
【特許文献2】特開2010−23195号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
近年、特許文献2に記載の産業用ロボットで搬送されるガラス基板は大型化しており、かつ、搬送時におけるガラス基板の温度が高くなる傾向にあるため、搬送されるガラス基板が持つ熱量が大きくなってきている。ハンドを介した熱伝導によってガラス基板からアームへ高い熱が伝わって、関節部に配置される軸受に高い熱がかかると、焼入れされている軸受の硬度が低下したり、軸受内のグリースの粘度が低下して油膜が切れるおそれがあるため、軸受が摩耗しやすくなったり、損傷しやすくなったりするおそれがある。また、ハンドを介した熱伝導によってガラス基板からアームに高い熱が伝わると、アームが大きく変形するおそれがあり、その結果、ガラス基板の搬送精度が低下するおそれがある。
【0006】
特許文献1に記載の耐熱ロボットハンドの構成を特許文献2に記載の産業用ロボットに用いれば、ハンドを介した熱伝導によってガラス基板からアームに伝達される熱量を低減することが可能になり、その結果、関節部に配置される軸受が過度に摩耗、損傷したり、アームが大きく変形するといった問題は生じにくくなる。しかしながら、特許文献1に記載の耐熱ロボットハンドは、半導体ウエハのような比較的小型の搬送対象物を搬送する産業用ロボットに用いられるものであり、特許文献1では、液晶ディスプレイ用のガラス基板のように比較的大型の搬送対象物を搬送する産業用ロボットにおいて、熱の影響による軸受の摩耗や損傷を抑制したり、熱の影響によるアームの変形を抑制するための具体的な構成は提案されていない。
【0007】
そこで、本発明の課題は、温度の高い比較的大型の搬送対象物を搬送する場合であっても、熱の影響による軸受の摩耗や損傷を抑制すること、熱の影響によるアームの変形を抑制すること、および、ハンドの重量を軽減することが可能な産業用ロボットを提供することにある。
【課題を解決するための手段】
【0008】
上記の課題を解決するため、本発明の産業用ロボットは、搬送対象物を搬送する産業用ロボットにおいて、搬送対象物が搭載される搭載部を有するハンドと、その先端側でハンドを保持するアームと、アームの基端側を保持する本体部と、搭載部の少なくとも上面を覆うカバー部材とを備え、カバー部材における輻射熱の反射率は、搭載部における輻射熱の反射率よりも高く、カバー部材の熱伝導率は、搭載部の熱伝導率よりも低く、搭載部の比重は、カバー部材の比重よりも小さいことを特徴とする。
【0009】
本発明の産業用ロボットは、搬送対象物が搭載される搭載部を有するハンドと、搭載部の少なくとも上面を覆うカバー部材とを備えており、カバー部材における輻射熱の反射率は、搭載部における輻射熱の反射率よりも高く、かつ、カバー部材の熱伝導率は、搭載部の熱伝導率よりも低くなっている。そのため、本発明では、熱放射(熱輻射)や熱伝導によって搬送対象物から搭載部へ伝達される熱量を、カバー部材によって低減することが可能になり、その結果、ハンドを介した熱伝導によって搬送対象物からアームに伝達される熱量を低減することが可能になる。したがって、本発明では、温度の高い搬送対象物を搬送する場合であっても、熱の影響による軸受の摩耗や損傷を抑制すること、および、熱の影響によるアームの変形を抑制することが可能になる。
【0010】
また、本発明では、搭載部の比重は、カバー部材の比重よりも小さくなっている。したがって、本発明では、比較的大型の搬送対象物を搬送するためにハンドが大型化しても、ハンドの重量を軽減することが可能になる。すなわち、搭載部を構成する材料がカバー部材を構成する材料と同じ材料であっても、ハンドを介した熱伝導によって搬送対象物からアームに伝達される熱量を低減することは可能になるが、この場合、比較的大型の搬送対象物を搬送するためにハンドが大型化すると、ハンドの重量が重くなる。これに対して、本発明では、比較的大型の搬送対象物を搬送するためにハンドが大型化しても、ハンドの重量を軽減することが可能になる。
【0011】
本発明において、カバー部材は、搭載部の上面および側面を覆っていることが好ましい。このように構成すると、熱放射によって搬送対象物から搭載部へ伝達される熱量を効果的に低減することが可能になる。
【0012】
本発明において、たとえば、搭載部は、セラミックで形成され、カバー部材は、ステンレス鋼板で形成されている。また、本発明において、たとえば、ハンドは、複数のフォークと、複数のフォークの基端側が固定されるとともにアームの先端側に保持されるハンド基部とを備え、フォークの少なくとも先端側部分が搭載部となっている。
【0013】
本発明において、フォークは、搭載部としてのフォーク先端部と、フォーク先端部の基端側が固定されるフォーク基端部とを備え、フォーク基端部の少なくとも一部は、中空状に形成されていることが好ましい。このように構成すると、フォーク基端部の少なくとも一部の断面積が小さくなるため、フォーク基端部の少なくとも一部における熱伝導経路が狭くなる。したがって、搬送対象物が搭載されるフォーク先端部からアームの先端側に保持されるハンド基部へ熱伝導によって伝達される熱量を効果的に低減することが可能になり、その結果、熱伝導によってハンドからアームに伝達される熱量を効果的に低減することが可能になる。また、このように構成すると、フォーク基端部の重量を軽減しつつ、フォーク基端部の強度を確保することが可能になる。なお、特許文献1では、フォークを有するハンドを備える産業用ロボットにおいて、熱の影響による軸受の摩耗や損傷を抑制したり、熱の影響によるアームの変形を抑制するための具体的な構成は提案されていない。
【0014】
本発明において、フォーク基端部における輻射熱の反射率は、フォーク先端部における輻射熱の反射率よりも高く、フォーク基端部の熱伝導率は、フォーク先端部の熱伝導率よりも低く、フォーク先端部の比重は、フォーク基端部の比重よりも小さいことが好ましい。このように構成すると、カバー部材によってフォーク基端部が覆われていなくても、熱放射や熱伝導によって搬送対象物からハンド基部へ伝達される熱量を低減することが可能になり、その結果、ハンドを介した熱伝導によって搬送対象物からアームに伝達される熱量を効果的に低減することが可能になる。
【0015】
本発明において、たとえば、フォーク先端部は、セラミックで形成され、フォーク基端部の少なくとも一部は、ステンレス鋼管で形成されている。
【0016】
本発明において、産業用ロボットは、アームの少なくとも上面を覆う第2のカバー部材を備え、第2のカバー部材の熱伝導率は、アームの熱伝導率よりも低くなっていることが好ましい。このように構成すると、熱放射によって搬送対象物からアームに伝達される熱量を、第2のカバー部材によって低減することが可能になる。なお、特許文献1では、熱放射によって搬送対象物からアームに伝達される熱量を低減するための具体的な構成は提案されていない。
【0017】
本発明において、搬送対象物は、たとえば、液晶ディスプレイ用のガラス基板である。上述のように、近年、産業用ロボットで搬送されるガラス基板が持つ熱量が大きくなってきているが、本発明では、搬送されるガラス基板が持つ熱量が大きくても、熱の影響による軸受の摩耗や損傷を抑制すること、および、熱の影響によるアームの変形を抑制することが可能になる。また、近年、搬送されるガラス基板は大型化しているが、本発明では、搬送されるガラス基板が大型化して、その結果、ハンドが大型化しても、ハンドの重量を軽減することが可能になる。
【発明の効果】
【0018】
以上のように、本発明の産業用ロボットでは、温度の高い比較的大型の搬送対象物を搬送する場合であっても、熱の影響による軸受の摩耗や損傷を抑制すること、熱の影響によるアームの変形を抑制すること、および、ハンドの重量を軽減することが可能になる。
【図面の簡単な説明】
【0019】
【図1】本発明の実施の形態にかかる産業用ロボットの平面図である。
【図2】図1(B)のE−E方向から産業用ロボットを示す側面図である。
【図3】図1に示すハンドの平面図である。
【図4】(A)は、図3のF部の拡大図であり、(B)は、図3のG−G断面の断面図である。
【図5】図4(A)のH−H断面の断面図である。
【図6】図4(A)のJ−J断面の断面図である。
【図7】(A)は、本発明の他の実施の形態にかかる第1アーム部の周辺部を示す概略図であり、(B)は、本発明の他の実施の形態にかかる第2アーム部の周辺部を示す概略図である。
【発明を実施するための形態】
【0020】
以下、図面を参照しながら、本発明の実施の形態を説明する。
【0021】
(産業用ロボットの概略構成)
図1は、本発明の実施の形態にかかる産業用ロボット1の平面図である。図2は、図1(B)のE−E方向から産業用ロボット1を示す側面図である。
【0022】
本形態の産業用ロボット1(以下、「ロボット1」とする。)は、搬送対象物である液晶ディスプレイ用のガラス基板2(以下、「基板2」とする。)を搬送するためのロボットである。本形態のロボット1は、特に大型の基板2の搬送に適した大型のロボットであり、たとえば、1辺が2.5m程度の矩形状の基板2を搬送する。また、ロボット1は、比較的温度の高い基板2の搬送に適したロボットであり、たとえば、500℃程度の基板2を搬送する。また、ロボット1は、真空中で基板2を搬送する。
【0023】
図1、図2に示すように、ロボット1は、基板2が搭載される2個のハンド3、4と、ハンド3がその先端側に回動可能に連結されるアーム5と、ハンド4がその先端側に回動可能に連結されるアーム6と、アーム5、6の基端側が回動可能に連結される本体部7と、本体部7を昇降させる昇降機構(図示省略)とを備えている。本体部7および昇降機構は、略有底円筒状に形成されたケース13の中に収容されている。ケース13の上端には、円板状に形成されたフランジ14が固定されている。フランジ14には、本体部7の上端側部分が配置される貫通孔が形成されている。
【0024】
ハンド3、4およびアーム5、6は、本体部7の上側に配置されている。また、ハンド3、4およびアーム5、6は、フランジ14の上側に配置されている。ロボット1は、上述のように、真空中で基板2を搬送するためのロボットであり、図2に示すように、ロボット1の、フランジ14の下端面よりも上側の部分は、真空領域VRの中(真空中)に配置されている。一方、ロボット1の、フランジ14の下端面よりも下側の部分は、大気領域ARの中(大気中)に配置されている。
【0025】
アーム5は、第1アーム部16と第2アーム部17とによって構成されている。また、アーム6は、アーム5と共通の第1アーム部16と第2アーム部18とによって構成されている。第1アーム部16は、二股状に形成されている。具体的には、第1アーム部16は、略V形状に形成されている。第1アーム部16および第2アーム部17、18は、アルミニウム合金で形成されている。
【0026】
第1アーム部16の基端側は、本体部7に回動可能に保持されている。二股状に形成される第1アーム部16の一方の先端側に、第2アーム部17が回動可能に保持され、第1アーム部16の他方の先端側に、第2アーム部18が回動可能に保持されている。第2アーム部17の先端側には、ハンド3が回動可能に保持され、第2アーム部18の先端側には、ハンド4が回動可能に保持されている。
【0027】
アーム5、6と本体部7との連結部(すなわち、第1アーム部16と本体部7との連結部)は、第1関節部20となっている。第1関節部20には、真空領域VRへの空気の流入を防ぐ磁性流体シール(図示省略)が配置されている。第1アーム部16と第2アーム部17との連結部は、第2関節部21となっており、第1アーム部16と第2アーム部18との連結部は、第2関節部22となっている。第2関節部21には、第2アーム部17を回動可能に支持する転がり軸受(図示省略)が配置され、第2関節部22には、第2アーム部18を回動可能に支持する転がり軸受(図示省略)が配置されている。
【0028】
本形態では、図2に示すように、水平方向から見たときに、第2アーム部17、18は、第1アーム部16よりも上側に配置されている。また、第2アーム部18は、第2アーム部17よりも上側に配置されている。また、水平方向から見たときに、ハンド3、4は、第2アーム部17と第2アーム部18との間に配置されている。具体的には、第2アーム部17の上面側にハンド3が連結され、第2アーム部18の下面側にハンド4が連結されており、水平方向から見たときに、ハンド3の上側にハンド4が配置されている。なお、アーム5、6が縮んでいるときに、ロボット1を上側から見ると、図1(B)に示すように、ハンド3とハンド4とが重なっている。
【0029】
ロボット1は、アーム5やアーム6を伸ばして、図示を省略する搬送用ラック内で基板2を搭載し、その後、アーム5やアーム6を縮めながら、搬送用ラックから基板2を搬出する。また、その後、ロボット1は、その方向を変えて、減圧された高温のチャンバー内へ(真空かつ高温のチャンバー内へ)基板2を搬入する。
【0030】
ハンド3、4は、基板2を搭載するための複数(たとえば、4本)のフォーク25と、複数のフォーク25の基端側が固定されるとともに第2アーム部17、18の先端側に回動可能に保持されるハンド基部26とから構成されている。フォーク25は、基板2が搭載されるフォーク先端部27と、フォーク先端部27の基端側が固定されるフォーク基端部28とから構成されている。フォーク先端部27は、フォーク25の先端側を構成し、フォーク基端部28は、フォーク25の基端側を構成している。本形態のフォーク先端部27は、搬送対象物である基板2が搭載される搭載部である。
【0031】
フォーク先端部27には、図3〜図6に示すように、フォーク先端部27の上面および側面を覆うカバー部材30が取り付けられている。以下、ハンド3およびカバー部材30の具体的な構成を説明する。なお、ハンド4は、ハンド3と同様に構成されているため、ハンド4の具体的な構成の説明は省略する。また、図1、図2では、カバー部材30の図示を省略している。
【0032】
(ハンドおよびカバー部材の構成)
図3は、図1に示すハンド3の平面図である。図4(A)は、図3のF部の拡大図であり、図4(B)は、図3のG−G断面の断面図である。図5は、図4(A)のH−H断面の断面図である。図6は、図4(A)のJ−J断面の断面図である。
【0033】
上述のように、ハンド3は、フォーク25とハンド基部26とから構成され、フォーク25は、フォーク先端部27とフォーク基端部28とから構成されている。
【0034】
フォーク先端部27は、セラミックで形成されている。このフォーク先端部27は、中実のセラミックで形成されており、その内部には、空間が形成されていない。また、フォーク先端部27は、細長い略四角柱状に形成されている。フォーク先端部27の上面には、複数の凸部27aが上側に突出するように形成されている。複数の凸部27aは、フォーク25の長手方向において所定のピッチで形成されている。また、複数の凸部27aは、フォーク25の長手方向においてフォーク先端部27の全域に形成されている。また、フォーク先端部27の基端側の上面には、フォーク25の長手方向において基板2を位置決めするための位置決め用凸部27cが上側に突出するように形成されている。なお、図3では、複数の凸部27aのうちの一部の凸部27aのみを図示している。
【0035】
上側から見たときの凸部27aの形状は、フォーク25の長手方向に長い略長方形状となっている。凸部27aの上面27bは、平面状に形成されている。また、上面27bは、カバー部材30を構成する後述の上面部30aの上面よりも上側に配置されている。この上面27bは、基板2が搭載される搭載面となっており、上面27bには、基板2の下面が当接する。位置決め用凸部27cは、基板2の下面および基板2の端部が当接するように、階段状に形成されている。なお、凸部27aおよび位置決め用凸部27cが、フォーク先端部27と別体で形成されて、フォーク先端部27に固定されても良い。
【0036】
フォーク基端部28は、フォーク先端部27が固定される第1固定部28aと、ハンド基部26に固定される第2固定部28bと、第1固定部28aと第2固定部28bとを繋ぐ連結部28cとから構成されており、全体として、略四角柱状に形成されている。フォーク基端部28の長さは、フォーク先端部27の長さよりも短くなっている。また、フォーク基端部28の厚さは、フォーク先端部27の厚さよりも厚くなっており、フォーク基端部28の幅は、フォーク先端部27の幅よりも広くなっている。
【0037】
連結部28cは、ステンレス鋼管で形成されており、その内部に空間を有する中空状に形成されている。連結部28cの肉厚は、薄くなっており、たとえば、連結部28cの肉厚は、4mm程度である。第1固定部28aおよび第2固定部28bは、ステンレス鋼で形成されるとともに、フォーク25の外形に合わせて、略直方体のブロック状に形成されている。第1固定部28aと連結部28cとは、互いに溶接で固定され、第2固定部28bと連結部28cとは、互いに溶接で固定されている。なお、第1固定部28aと連結部28cとは溶接以外の方法で互いに固定されても良い。たとえば、第1固定部28aと連結部28cとは互いに接着で固定されても良いし、ボルト等を用いて固定されても良い。同様に、第2固定部28bと連結部28cとは溶接以外の方法で互いに固定されても良い。たとえば、第2固定部28bと連結部28cとは互いに接着で固定されても良いし、ボルト等を用いて固定されても良い。
【0038】
第1固定部28aの下面には、図4(B)に示すように、フォーク先端部27の基端側部分が配置される凹部28dが形成されており、フォーク先端部27の基端側部分は、凹部28dの中に配置された状態で、第1固定部28aに固定されている。第2固定部28bには、連結部28cの内側の空間に繋がる貫通孔28eが形成されている。第2固定部28bは、ハンド基部26の下面に形成される凹部26aの中に配置された状態で、ハンド基部26に固定されている。ハンド基部26は、アルミニウム合金またはステンレス鋼で形成されている。
【0039】
カバー部材30は、薄いステンレス鋼板で形成されている。また、カバー部材30は、ステンレス鋼板を略四角溝状に折り曲げることで形成されており、フォーク先端部27の上面を覆う上面部30aと、フォーク先端部27の側面を覆う2個の側面部30bとを備えている。上面部30aは、図6に示すように、フォーク25の長手方向に直交する方向における上面部30aの内側部分がその両端部よりもわずかに下側に配置されるように、折り曲げられている。2個の側面部30bは、フォーク25の長手方向に直交する方向における上面部30aの両端のそれぞれに繋がるように形成されている。
【0040】
上面部30aには、フォーク先端部27の凸部27aが配置される複数の配置孔30cが形成されている。複数の配置孔30cは、フォーク25の長手方向において所定のピッチで形成されている。配置孔30cは、上面部30aを貫通するように形成されており、凸部27aの上端側は、上面部30aよりも上側へ突出している。上側から見たときの配置孔30cの形状は、フォーク25の長手方向に長い略長方形状となっている。フォーク25の長手方向における配置孔30cの幅は、フォーク25の長手方向における凸部27aの幅よりも広くなっている。
【0041】
また、上面部30aには、カバー部材30をフォーク先端部27に取り付けるための複数の貫通孔30dが形成されている。複数の貫通孔30dは、フォーク25の長手方向において所定のピッチで形成されている。貫通孔30dは、上面部30aを貫通するように形成されている。上側から見たときの貫通孔30dの形状は、フォーク25の長手方向に長い長円形状となっている。
【0042】
カバー部材30は、図6に示すように、カラー32と、スペーサ33と、皿ネジ34とによって、フォーク先端部27に取り付けられている。カラー32は、鍔部32aと筒部32bとを有する扁平な鍔付きの略円筒状に形成されている。スペーサ33は、扁平な円筒状に形成されている。筒部32bは、カバー部材30の貫通孔30dの中に配置されており、その下端は、フォーク先端部27の上面に当接している。鍔部32aは、上面部30aの上側に配置されている。スペーサ33は、その下面がフォーク先端部27の上面に当接し、その上面が上面部30aの下面に当接するように、筒部32bの外周側に配置されている。カラー32の内周面は、皿ネジ34の頭部に係合する傾斜面となっており、フォーク先端部27の上面に形成されるネジ孔に皿ネジ34がねじ込まれることで、カバー部材30は、フォーク先端部27に固定されている。なお、本形態では、鍔部32aの下面が上面部30aの上面に軽く接触しているか、または、鍔部32aの下面と上面部30aの上面との間にわずかな隙間が形成されている。
【0043】
上述のように、スペーサ33の下面はフォーク先端部27の上面に当接し、スペーサ33の上面は上面部30aの下面に当接しているため、フォーク先端部27の上面と上面部30aの下面との間には、隙間が形成されている。また、フォーク25の長手方向に直交する方向における上面部30aの幅は、この方向におけるフォーク先端部27の幅よりも広くなっており、フォーク先端部27の側面と側面部30bとの間には、隙間が形成されている。上下方向における側面部30bの幅は、上下方向におけるフォーク先端部27の厚みと略等しくなっており、側面部30bは、フォーク先端部27の側面のほぼ全域を覆っている。また、上面部30aは、凸部27aおよび位置決め用凸部27cを除くフォーク先端部27の上面のほぼ全域を覆っている。
【0044】
本形態では、カバー部材30における輻射熱の反射率およびフォーク基端部28における輻射熱の反射率は、フォーク先端部27における輻射熱の反射率よりも高くなっている。また、上述のように、カバー部材30およびフォーク基端部28はステンレス鋼で形成され、フォーク先端部27はセラミックで形成されており、カバー部材30の熱伝導率およびフォーク基端部28の熱伝導率は、フォーク先端部27の熱伝導率よりも低くなっている。また、フォーク先端部27の比重は、カバー部材30の比重およびフォーク基端部28の比重よりも小さくなっている。
【0045】
(本形態の主な効果)
以上説明したように、本形態では、カバー部材30における輻射熱の反射率は、フォーク先端部27における輻射熱の反射率よりも高くなっており、かつ、カバー部材30の熱伝導率は、フォーク先端部27の熱伝導率よりも低くなっている。そのため、本形態では、熱放射によって基板2からフォーク先端部27に伝達される熱量をカバー部材30によって低減することが可能になる。特に本形態では、カバー部材30が、フォーク先端部27の上面に加え、フォーク先端部27の側面のほぼ全域を覆っているため、熱放射によって基板2からフォーク先端部27に伝達される熱量を効果的に低減することが可能になる。また、本形態では、フォーク先端部27の上面と上面部30aの下面との間に隙間が形成されるとともに、フォーク先端部27の側面と側面部30bとの間に隙間が形成されており、カバー部材30からフォーク先端部27への熱伝導経路がカラー32およびスペーサ33となっているため、熱放射によって基板2からカバー部材30に伝達された熱が熱伝導によってフォーク先端部27に伝達されるのを抑制することが可能になる。
【0046】
したがって、本形態では、ハンド3、4を介した熱伝導によって基板2からアーム5、6に伝達される熱量を低減することが可能になる。その結果、本形態では、熱量の大きな基板2を搬送する場合であっても、第2関節部21、22に配置される転がり軸受が熱の影響によって摩耗したり損傷したりするのを抑制することが可能になり、また、熱の影響によるアーム5、6の変形を抑制することが可能になる。
【0047】
本形態では、フォーク基端部28の連結部28cは、中空状に形成されており、連結部28cの断面積が小さくなっている。すなわち、本形態では、連結部28cにおける熱伝導経路が狭くなっている。そのため、本形態では、フォーク先端部27からハンド基部26へ熱伝導によって伝達される熱量を効果的に低減することが可能になり、その結果、熱伝導によってハンド3、4からアーム5、6に伝達される熱量を効果的に低減することが可能になる。
【0048】
また、本形態では、フォーク基端部28における輻射熱の反射率は、フォーク先端部27における輻射熱の反射率よりも高くなっており、かつ、フォーク基端部28の熱伝導率は、フォーク先端部27の熱伝導率よりも低くなっている。そのため、カバー部材30によってフォーク基端部28が覆われていなくても、熱放射によって基板2からハンド基部26へ伝達される熱量を低減することが可能になり、その結果、ハンド3、4を介した熱伝導によって基板2からアーム5、6に伝達される熱量を効果的に低減することが可能になる。
【0049】
本形態では、フォーク先端部27の比重は、カバー部材30の比重よりも小さくなっている。そのため、本形態では、比較的大型の基板2を搬送するためにハンド3、4が大型化しても、ハンド3、4の重量を軽減することが可能になる。すなわち、カバー部材30と同じステンレス鋼でフォーク先端部27が形成されている場合であっても、ハンド3、4を介した熱伝導によって基板2からアーム5、6に伝達される熱量を低減することが可能になるが、この場合、比較的大型の基板2を搬送するためにハンド3、4が大型化すると、ハンド3、4の重量が重くなる。これに対して、本形態では、ハンド3、4が大型化しても、ハンド3、4の重量を軽減することが可能になる。また、ステンレス鋼の線膨張率は、セラミックの線膨張率よりも大きいため、フォーク先端部27がステンレス鋼で形成されている場合には、フォーク先端部27が熱変形しやすくなるが、本形態では、フォーク先端部27がセラミックで形成されているため、フォーク先端部27の熱変形を抑制することが可能になる。
【0050】
本形態では、フォーク基端部28の連結部28cは、ステンレス鋼管で形成されている。そのため、本形態では、連結部28cの重量を軽減しつつ、連結部28cの剛性を確保することが可能になる。
【0051】
本形態では、フォーク25の長手方向におけるカバー部材30の配置孔30cの幅は、フォーク25の長手方向におけるフォーク先端部27の凸部27aの幅よりも広くなっている。また、本形態では、鍔部32aの下面が上面部30aの上面に軽く接触しているか、または、鍔部32aの下面と上面部30aの上面との間にわずかな隙間が形成されている。そのため、本形態では、フォーク先端部27の線膨張率とカバー部材30の線膨張率とが異なっていても、比較的温度の高い基板2が搭載されたときのフォーク先端部27およびカバー30の熱変形を抑制することが可能になる。
【0052】
(他の実施の形態)
上述した形態は、本発明の好適な形態の一例ではあるが、これに限定されるものではなく本発明の要旨を変更しない範囲において種々変形実施が可能である。
【0053】
上述した形態では、カバー部材30は、フォーク先端部27の側面のほぼ全域を覆っている。この他にもたとえば、カバー部材30は、フォーク先端部27の側面の一部を覆っていても良いし、フォーク先端部27の上面のみを覆って、フォーク先端部27の側面を覆っていなくても良い。また、フォーク先端部27の下面を覆うようにカバー部材30が構成されても良い。また、上述した形態では、スペーサ33を用いて、フォーク先端部27にカバー部材30が取り付けられているが、スペーサ33を使わずに、フォーク先端部27にカバー部材30が取り付けられても良い。この場合には、カバー部材30の上面部30aの下面は、フォーク先端部27の上面に当接する。
【0054】
上述した形態において、第1アーム部16の上面および下面は、図7(A)に示すように、第1アーム部16よりも熱伝導率の低い第2のカバー部材としてのカバー部材40に覆われても良い。たとえば、第1アーム部16の上面および下面は、ステンレス鋼板で形成されるとともに上下方向から第1アーム部16を挟むように配置される2個のカバー部材40に覆われても良い。同様に、第2アーム部17、18の上面および下面は、図7(B)に示すように、第2アーム部17、18よりも熱伝導率の低い第2のカバー部材としてのカバー部材41に覆われても良い。たとえば、第2アーム部17、18の上面および下面は、ステンレス鋼板で形成されるとともに上下方向から第2アーム部17、18を挟むように配置される2個のカバー部材41に覆われても良い。この場合には、熱放射によって基板2からアーム5、6に伝達される熱量を、カバー部材40、41によって低減することが可能になる。
【0055】
なお、この場合には、熱伝導によるカバー部材40、41からアーム5、6への熱の伝達を抑制するため、カバー部材40、41とアーム5、6との間に隙間が形成されていることが好ましい。また、この場合には、カバー部材40、41は、図7に示すように、第1アーム部16や第2アーム部17、18の側面の一部を覆っていても良いし、第1アーム部16や第2アーム部17、18の側面の全体を覆っていても良い。また、カバー部材40、41は、第1アーム部16や第2アーム部17、18の側面を覆っていなくても良い。また、第1アーム部16や第2アーム部17、18は、その上側から1個のカバー部材40、41に覆われても良い。
【0056】
上述した形態では、フォーク25の先端側を構成するフォーク先端部27が、搬送対象物である基板2が搭載される搭載部となっている。この他にもたとえば、フォーク25の全体が、搬送対象物である基板2が搭載される搭載部となっていても良い。この場合には、たとえば、フォーク25の全体が中実のセラミックで形成され、フォーク25の全体がカバー部材30によって覆われる。
【0057】
上述した形態では、フォーク先端部27は、セラミックで形成され、カバー部材30は、ステンレス鋼板で形成されている。この他にもたとえば、カバー部材30における輻射熱の反射率がフォーク先端部27における輻射熱の反射率よりも高くなっており、カバー部材30の熱伝導率がフォーク先端部27の熱伝導率よりも低くなっており、かつ、フォーク先端部27の比重がカバー部材30の比重よりも小さくなっているのであれば、フォーク先端部27は、セラミック以外の材料で形成されても良いし、カバー部材30はステンレス鋼以外の材料で形成されても良い。たとえば、フォーク先端部27は、カーボン繊維入りの樹脂で形成されても良い。フォーク先端部27がカーボン繊維入りの樹脂で形成される場合には、フォーク先端部27は、たとえば、中空状に形成される。
【0058】
上述した形態では、フォーク基端部28の一部である連結部28cが中空状に形成されているが、フォーク基端部28の全体が中空状に形成されても良い。また、フォーク基端部28の全体が中実となっていても良い。また、上述した形態では、フォーク基端部28における輻射熱の反射率は、フォーク先端部27における輻射熱の反射率よりも高くなっているが、フォーク基端部28における輻射熱の反射率は、フォーク先端部27における輻射熱の反射率より低くても良いし、フォーク先端部27における輻射熱の反射率と同じであっても良い。また、フォーク基端部28の熱伝導率は、フォーク先端部27の熱伝導率よりも低くなっているが、フォーク基端部28の熱伝導率は、フォーク先端部27の熱伝導率より高くても良いし、フォーク先端部27の熱伝導率と同じであっても良い。さらに、フォーク基端部28の比重は、フォーク先端部27の比重よりも大きくなっているが、フォーク基端部28の比重は、フォーク先端部27の比重より小さくても良いし、フォーク先端部27の比重と同じであっても良い。
【0059】
上述した形態では、ハンド3、4は、フォーク25を備えているが、ハンド3、4は、フォーク25を備えていなくても良い。たとえば、ハンド3、4は、上側から見たときの形状が略Y形状となるように形成されても良いし、上述の特許文献1に開示されたハンド部のように、上側から見たときの形状が略長方形状となるように形成されても良い。この場合には、たとえば、ハンド3、4は、ハンド3、4の先端側を構成するハンド先端部と、ハンド3、4の基端側を構成するハンド基端部とを備えるとともに、ハンド先端部が中実のセラミック等で形成され、ハンド基端部が中空のステンレス鋼管等で形成されても良い。
【0060】
上述した形態では、アーム6は、アーム5と共通の第1アーム部16と第2アーム部18とによって構成されているが、アーム6は、第1アーム部16と別個に設けられた第1アーム部と第2アーム部18とによって構成されても良い。また、上述した形態では、アーム5、6は、第1アーム部16と第2アーム部17、18との2個のアーム部によって構成されているが、アーム5、6は、1個のアーム部によって構成されても良いし、3個以上のアーム部によって構成されても良い。
【0061】
上述した形態では、ロボット1によって搬送される搬送対象物は基板2であるが、ロボット1によって搬送される搬送対象物は半導体ウエハ等であっても良い。また、ロボット1は、真空中で基板2を搬送するが、ロボット1は、大気中で基板2を搬送しても良い。
【符号の説明】
【0062】
1 ロボット(産業用ロボット)
2 基板(ガラス基板、搬送対象物)
3、4 ハンド
5、6 アーム
7 本体部
25 フォーク
26 ハンド基部
27 フォーク先端部(搭載部)
28 フォーク基端部
30 カバー部材
40、41 第2のカバー部材
【特許請求の範囲】
【請求項1】
搬送対象物を搬送する産業用ロボットにおいて、
前記搬送対象物が搭載される搭載部を有するハンドと、その先端側で前記ハンドを保持するアームと、前記アームの基端側を保持する本体部と、前記搭載部の少なくとも上面を覆うカバー部材とを備え、
前記カバー部材における輻射熱の反射率は、前記搭載部における輻射熱の反射率よりも高く、
前記カバー部材の熱伝導率は、前記搭載部の熱伝導率よりも低く、
前記搭載部の比重は、前記カバー部材の比重よりも小さいことを特徴とする産業用ロボット。
【請求項2】
前記カバー部材は、前記搭載部の上面および側面を覆っていることを特徴とする請求項1記載の産業用ロボット。
【請求項3】
前記搭載部は、セラミックで形成され、前記カバー部材は、ステンレス鋼板で形成されていることを特徴とする請求項1または2記載の産業用ロボット。
【請求項4】
前記ハンドは、複数のフォークと、複数の前記フォークの基端側が固定されるとともに前記アームの先端側に保持されるハンド基部とを備え、
前記フォークの少なくとも先端側部分が前記搭載部となっていることを特徴とする請求項1から3のいずれかに記載の産業用ロボット。
【請求項5】
前記フォークは、前記搭載部としてのフォーク先端部と、前記フォーク先端部の基端側が固定されるフォーク基端部とを備え、
前記フォーク基端部の少なくとも一部は、中空状に形成されていることを特徴とする請求項4記載の産業用ロボット。
【請求項6】
前記フォーク基端部における輻射熱の反射率は、前記フォーク先端部における輻射熱の反射率よりも高く、
前記フォーク基端部の熱伝導率は、前記フォーク先端部の熱伝導率よりも低く、
前記フォーク先端部の比重は、前記フォーク基端部の比重よりも小さいことを特徴とする請求項5記載の産業用ロボット。
【請求項7】
前記フォーク先端部は、セラミックで形成され、前記フォーク基端部の少なくとも一部は、ステンレス鋼管で形成されていることを特徴とする請求項5または6記載の産業用ロボット。
【請求項8】
前記アームの少なくとも上面を覆う第2のカバー部材を備え、
前記第2のカバー部材の熱伝導率は、前記アームの熱伝導率よりも低くなっていることを特徴とする請求項1から7のいずれかに記載の産業用ロボット。
【請求項9】
前記搬送対象物は、液晶ディスプレイ用のガラス基板であることを特徴とする請求項1から8のいずれかに記載の産業用ロボット。
【請求項1】
搬送対象物を搬送する産業用ロボットにおいて、
前記搬送対象物が搭載される搭載部を有するハンドと、その先端側で前記ハンドを保持するアームと、前記アームの基端側を保持する本体部と、前記搭載部の少なくとも上面を覆うカバー部材とを備え、
前記カバー部材における輻射熱の反射率は、前記搭載部における輻射熱の反射率よりも高く、
前記カバー部材の熱伝導率は、前記搭載部の熱伝導率よりも低く、
前記搭載部の比重は、前記カバー部材の比重よりも小さいことを特徴とする産業用ロボット。
【請求項2】
前記カバー部材は、前記搭載部の上面および側面を覆っていることを特徴とする請求項1記載の産業用ロボット。
【請求項3】
前記搭載部は、セラミックで形成され、前記カバー部材は、ステンレス鋼板で形成されていることを特徴とする請求項1または2記載の産業用ロボット。
【請求項4】
前記ハンドは、複数のフォークと、複数の前記フォークの基端側が固定されるとともに前記アームの先端側に保持されるハンド基部とを備え、
前記フォークの少なくとも先端側部分が前記搭載部となっていることを特徴とする請求項1から3のいずれかに記載の産業用ロボット。
【請求項5】
前記フォークは、前記搭載部としてのフォーク先端部と、前記フォーク先端部の基端側が固定されるフォーク基端部とを備え、
前記フォーク基端部の少なくとも一部は、中空状に形成されていることを特徴とする請求項4記載の産業用ロボット。
【請求項6】
前記フォーク基端部における輻射熱の反射率は、前記フォーク先端部における輻射熱の反射率よりも高く、
前記フォーク基端部の熱伝導率は、前記フォーク先端部の熱伝導率よりも低く、
前記フォーク先端部の比重は、前記フォーク基端部の比重よりも小さいことを特徴とする請求項5記載の産業用ロボット。
【請求項7】
前記フォーク先端部は、セラミックで形成され、前記フォーク基端部の少なくとも一部は、ステンレス鋼管で形成されていることを特徴とする請求項5または6記載の産業用ロボット。
【請求項8】
前記アームの少なくとも上面を覆う第2のカバー部材を備え、
前記第2のカバー部材の熱伝導率は、前記アームの熱伝導率よりも低くなっていることを特徴とする請求項1から7のいずれかに記載の産業用ロボット。
【請求項9】
前記搬送対象物は、液晶ディスプレイ用のガラス基板であることを特徴とする請求項1から8のいずれかに記載の産業用ロボット。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−103331(P2013−103331A)
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願番号】特願2012−55523(P2012−55523)
【出願日】平成24年3月13日(2012.3.13)
【出願人】(000002233)日本電産サンキョー株式会社 (1,337)
【Fターム(参考)】
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願日】平成24年3月13日(2012.3.13)
【出願人】(000002233)日本電産サンキョー株式会社 (1,337)
【Fターム(参考)】
[ Back to top ]